























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Автор: Эдвардс Ч.Г. Пенни Д.Э.
Теги: вычислительная математика численный анализ программирование математика дифференциальные уравнения язык программирования matlab
ISBN: 978-5-8459-1166-7
Год: 2008




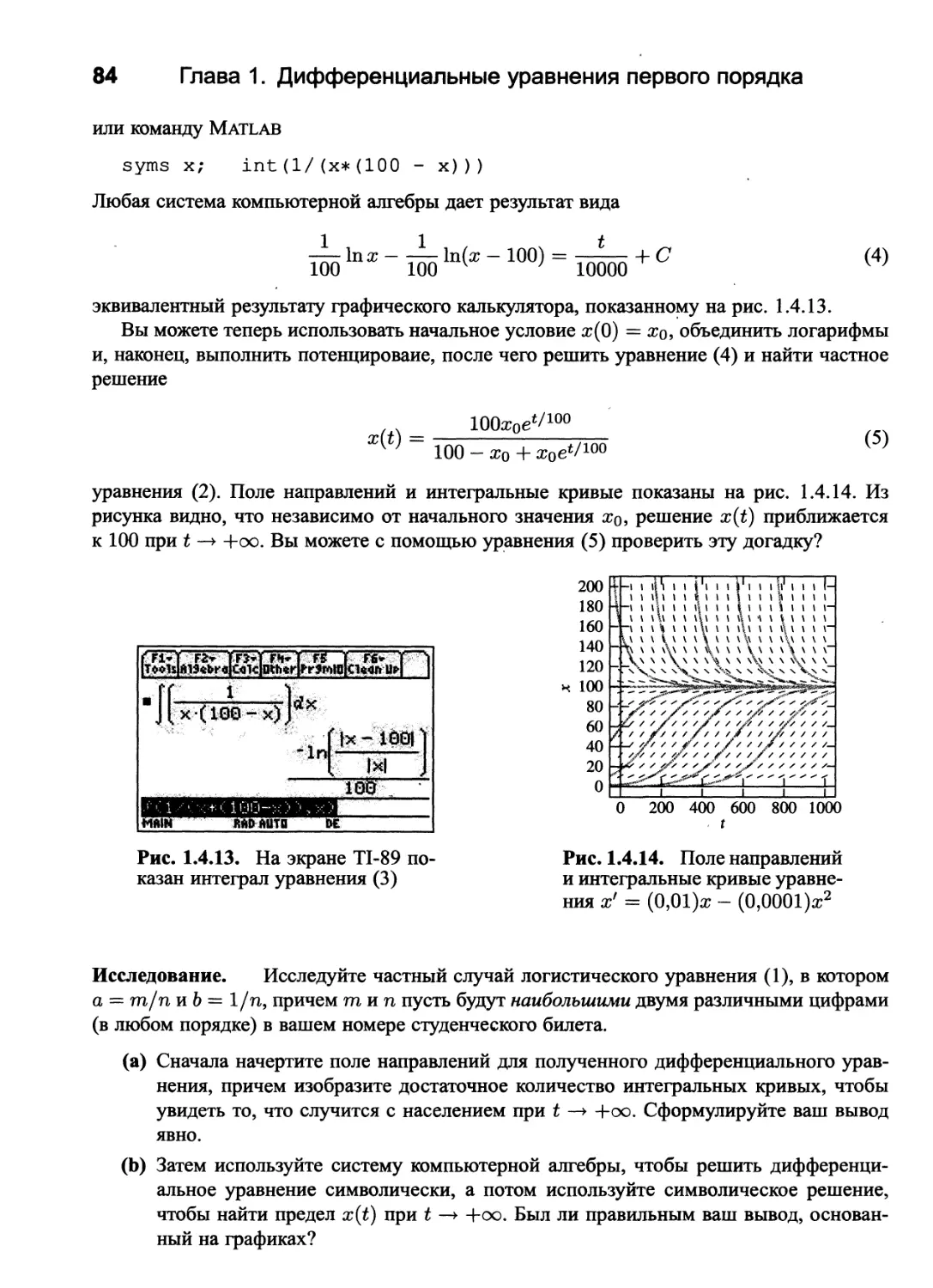
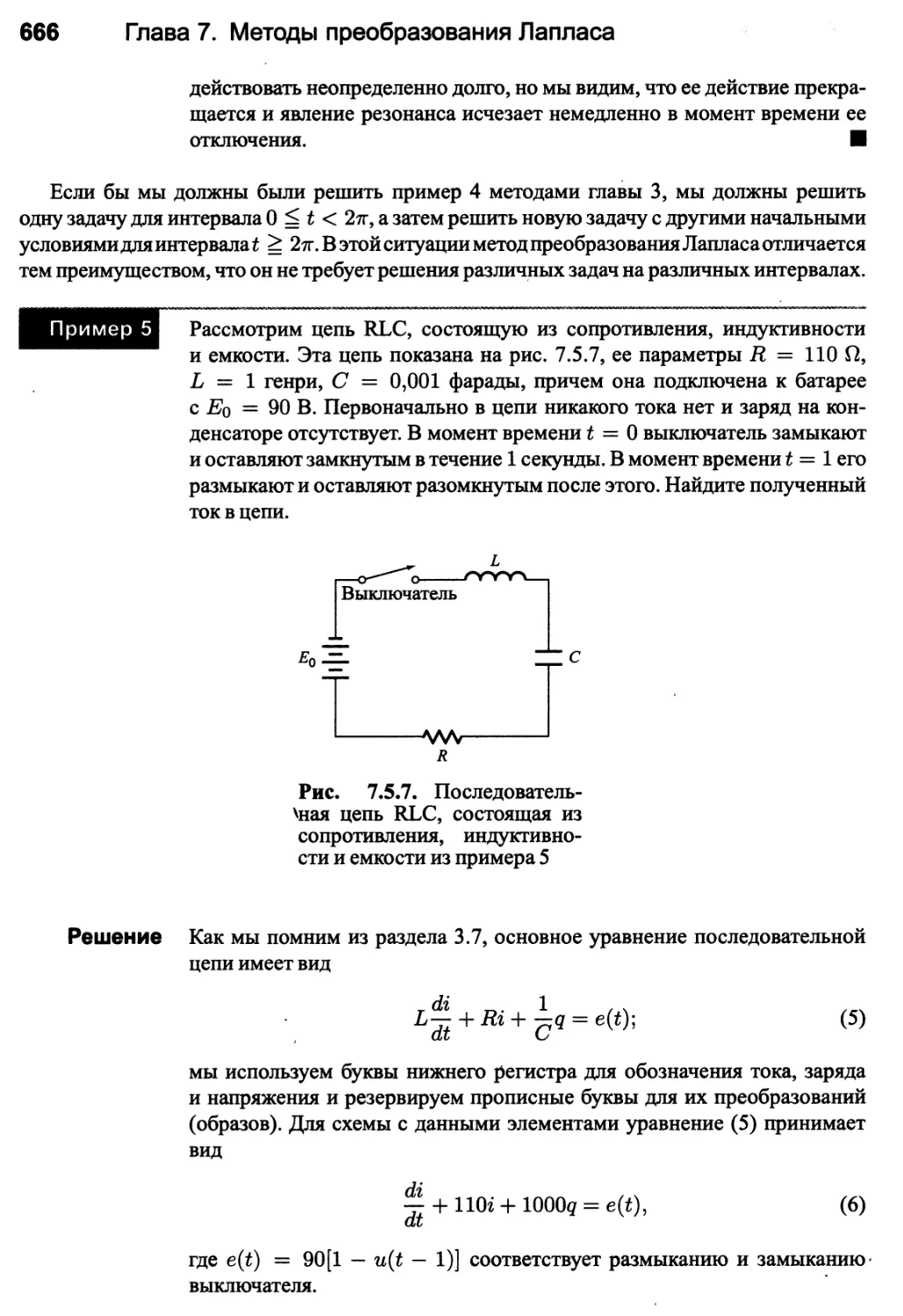
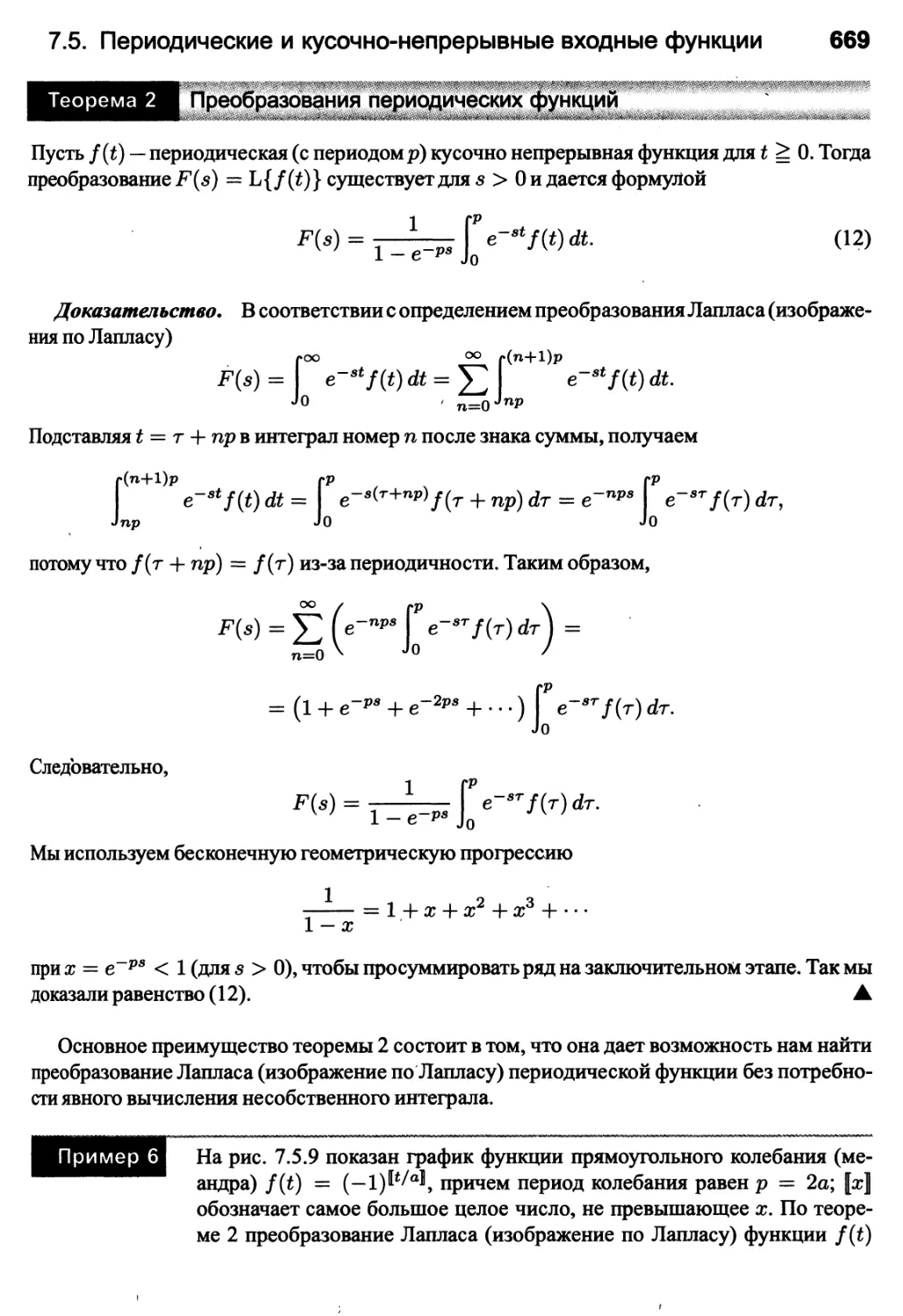
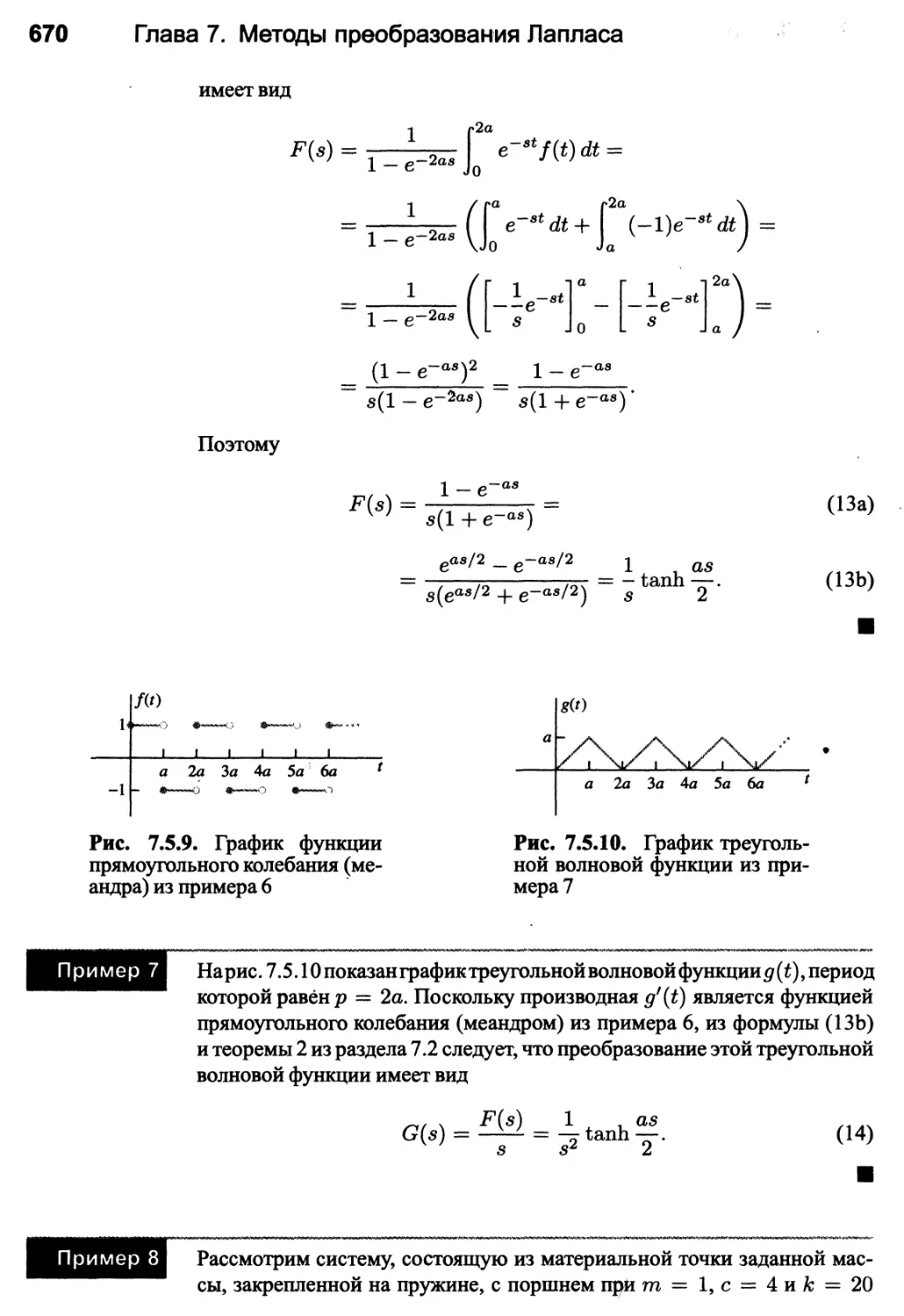
Текст
ДИФФЕРЕНЦИАЛЬНЫЕ
УРАВНЕНИЯ
И КРАЕВЫЕ ЗАДАЧ И
Моделирование
и вычисление с помощью Mathematica,
Maple и MATLAB
3-е издание
ЭДВАРДС
и ПЕННИ
DIFFERENTIAL EQUATIONS
AND BOUNDARY VALUE
PROBLEMS
COMPUTING AND MODELING
Third Edition
С HENRY EDWARDS
DAVID E. PENNY
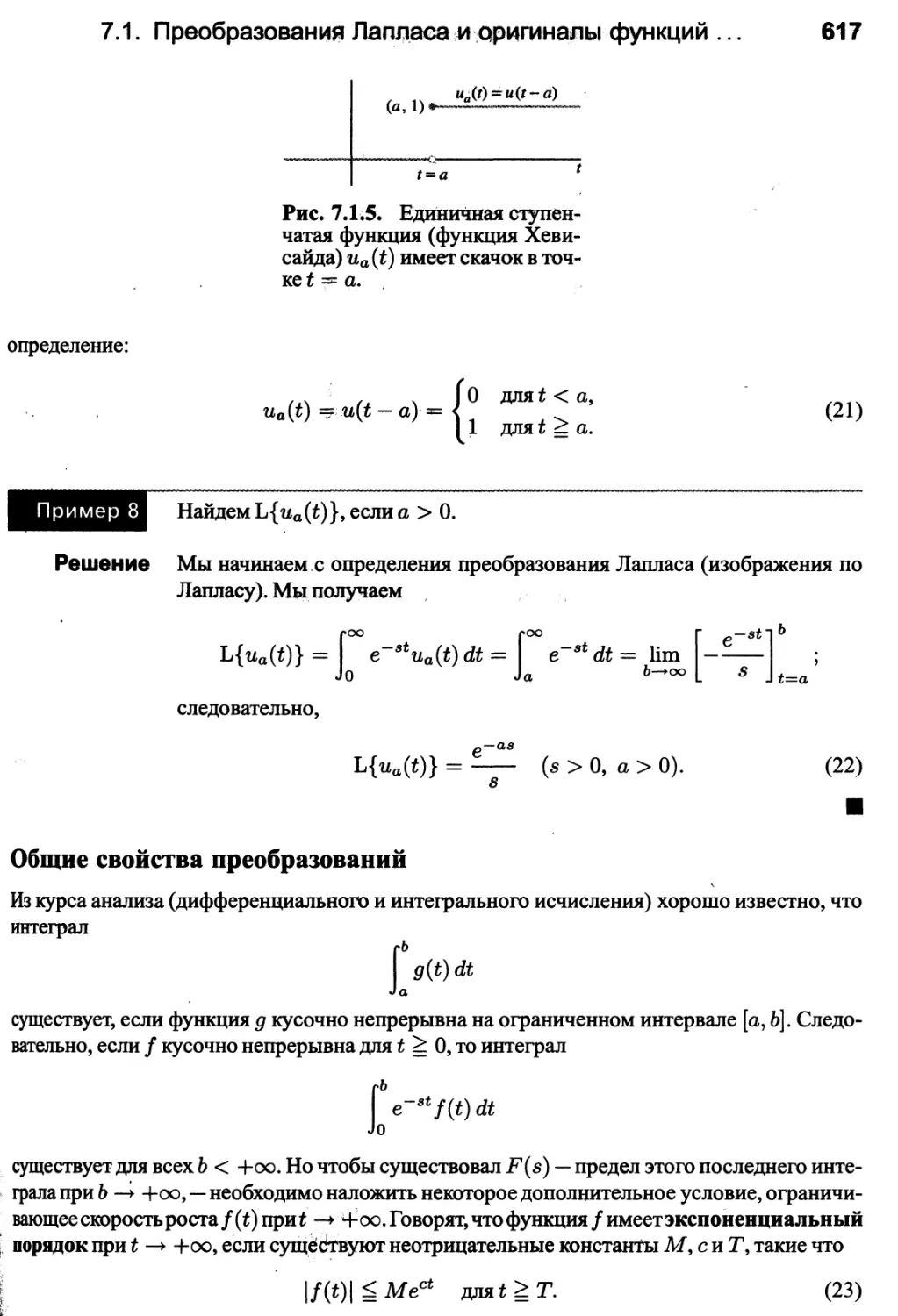
The University of Georgia
PEARSON
Prentice
Hall
Pearson Education, Inc.
Upper Saddle River, NJ 07458
ДИФФЕРЕНЦИАЛЬНЫЕ
УРАВНЕНИЯ
И КРАЕВЫЕ ЗАДАЧИ
МОДЕЛИРОВАНИЕ И ВЫЧИСЛЕНИЕ
С ПОМОЩЬЮ MATHEMATICA, MAPLE
И MATLAB
3-е издание
ЧАРЛЬЗ ГЕНРИ ЭДВАРДС
И ДЭВИД Э. ПЕННИ
Москва • Санкт-Петербург • Киев
2008
ББК (ВJ2,1
Э18
УДК 519.62
Издательский дом "Вильяме"
Зав. редакцией С.К Тригуб
Перевод с английского и редакция Я.К. Шмидского
По общим вопросам обращайтесь в Издательский дом "Вильяме" по адресу:
info@williamspublishing.com, http://www.williamspublishing.com
115419, Москва, а/я 783; 03150, Киев, а/я 152
Эдварде, Чарльз Генри, Пенни, Дэвид Э.
Э18 Дифференциальные уравнения и краевые задачи: моделирование и вычисление
с помощью Mathematica, Maple и MATLAB. 3-е издание. : Пер. с англ. — М. : ООО
"И.Д. Вильяме", 2008. - 1104 с. : ил. - Парал. тит. англ.
ISBN 978-5-8459-1166-7 (рус.)
Данный учебник представляет собой весьма полный современный вводный курс
обыкновенных дифференциальных уравнений. Довольно подробно освещены все темы,
затрагиваемые в классических вводных курсах, включая применение матричных методов,
операционного исчисления, степенных рядов и рядов Фурье. Не обойдены вниманием и
современные исследования в области дифференциальных уравнений, такие как, например, хаос
в динамических системах и нелинейные явления и системы. Особое внимание авторы
уделяют численным методам и обучению построения математических моделей самых
разнообразных (например, экологических, физических, инженерных) систем. Для изучения таких
моделей авторы используют самые современные математические пакеты: MATLAB, Maple
и Mathematica. Кроме того, для каждого раздела имеются задачи различной сложности, а
также проекты для самостоятельной разработки студентами. Несомненно, книга будет полезна
всем, кто изучает дифференциальные уравнения — как математикам, так и студентам других
специальностей — инженерам, физикам, химикам, биологам, географам и геологам.
ББК (ВJ2Д
Все названия программных продуктов являются зарегистрированными торговыми марками соответствующих фирм.
Никакая часть настоящего издания ни в каких целях не может быть воспроизведена в какой бы то ни было форме и какими
бы то ни было средствами, будь то электронные или механические, включая фотокопирование и запись на магнитный носитель,
если на это нет письменного разрешения издательства Prentice Hall, Inc.
Authorized translation from the English language edition published by Prentice Hall, Inc., Copyright (c) 2004, 2000, 1996 by
Pearson Education, Lie.
All rights reserved. No part of this book may be reproduced, in any form or by any means, without permission in writing from the
publisher.
Russian language edition is published by Williams Publishing House according to the Agreement with R&I Enterprises International,
Copyright © 2008.
MATLAB is a registered trademark of The Math Works, Inc.
Maple is a registered trademark of Waterloo Maple, Inc.
Mathematica is a registered trademark of Wolfram Research, Inc.
ISBN 978-5-8459-1166-7 (рус.) (с) Издательский дом "Вильяме", 2008
ISBN 0-13^065245-8 (англ.) © 2004, 2000, 1996 by Pearson Education, Inc.
ОГЛАВЛЕНИЕ
Предисловие 11
1 Дифференциальные уравнения первого порядка 21
2 Математические модели и численные методы 127
3 Линейные уравнения высших порядков 219
4 Введение в системы дифференциальных уравнений 349
5 Линейные системы дифференциальных уравнений 401
6 Нелинейные системы и явления 509
7 Методы преобразования Лапласа 609
8 Методы степенных рядов 693
9 Методы рядов Фурье 785
10 Собственные значения и краевые (граничные) задачи 881
Литература для дальнейшего изучения 970
Приложение. Существование и единственность решений 979
Ответы к избранным задачам 997
Предметный указатель 1087
СОДЕРЖАНИЕ
Прикладные модули
Предисловие 11
9
1
ГЛАВА Дифференциальные уравнения первого
порядка 21
1.1 Дифференциальные уравнения и математические
модели 21
1.2 Интегралы в качестве общих и частных решений 34
1.3 Поля направлений и интегральные кривые 45
1.4 Уравнения с разделяющимися переменными
и приложения 63
1.5 Линейные уравнения первого порядка 85
1.6 Замена переменных и уравнения в полных
дифференциалах 101
ГЛАВА
2
Математические модели и численные
методы 127
2.1 Модели роста населения 127
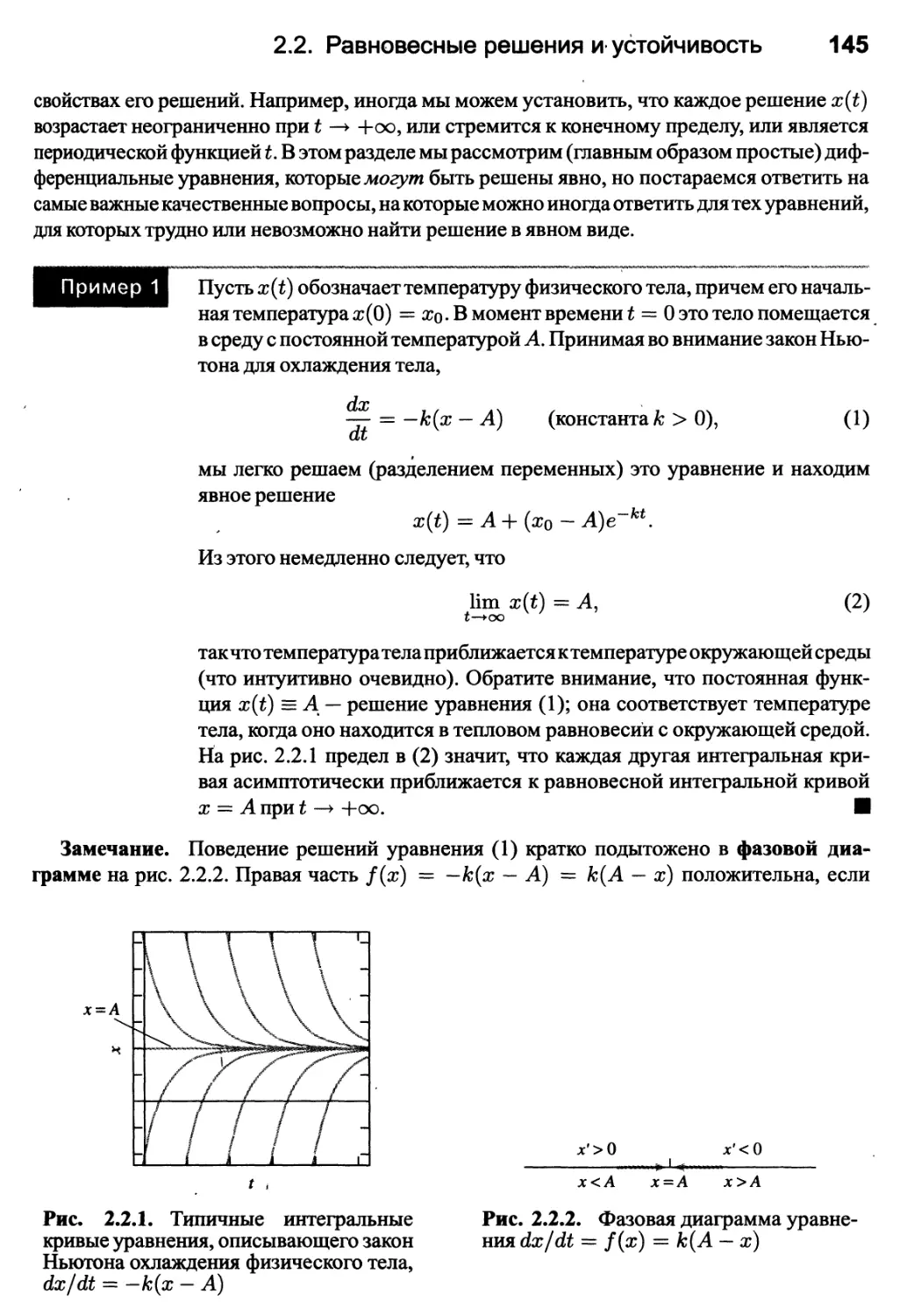
2.2 Равновесные решения и устойчивость 144
2.3 Модели типа ускорение-скорость 156
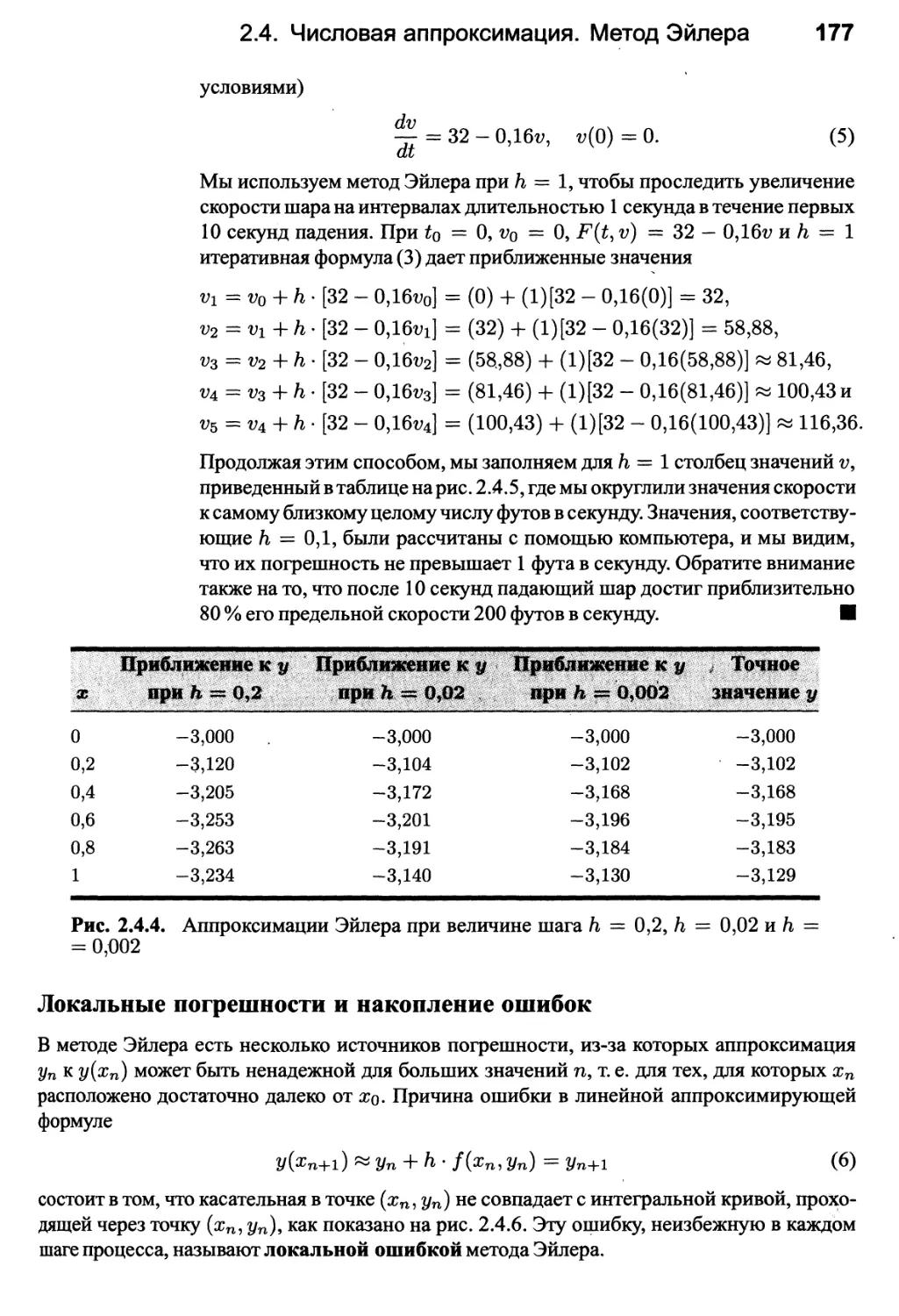
2.4 Числовая аппроксимация. Метод Эйлера 172
2.5 Более подробный анализ метода Эйлера 187
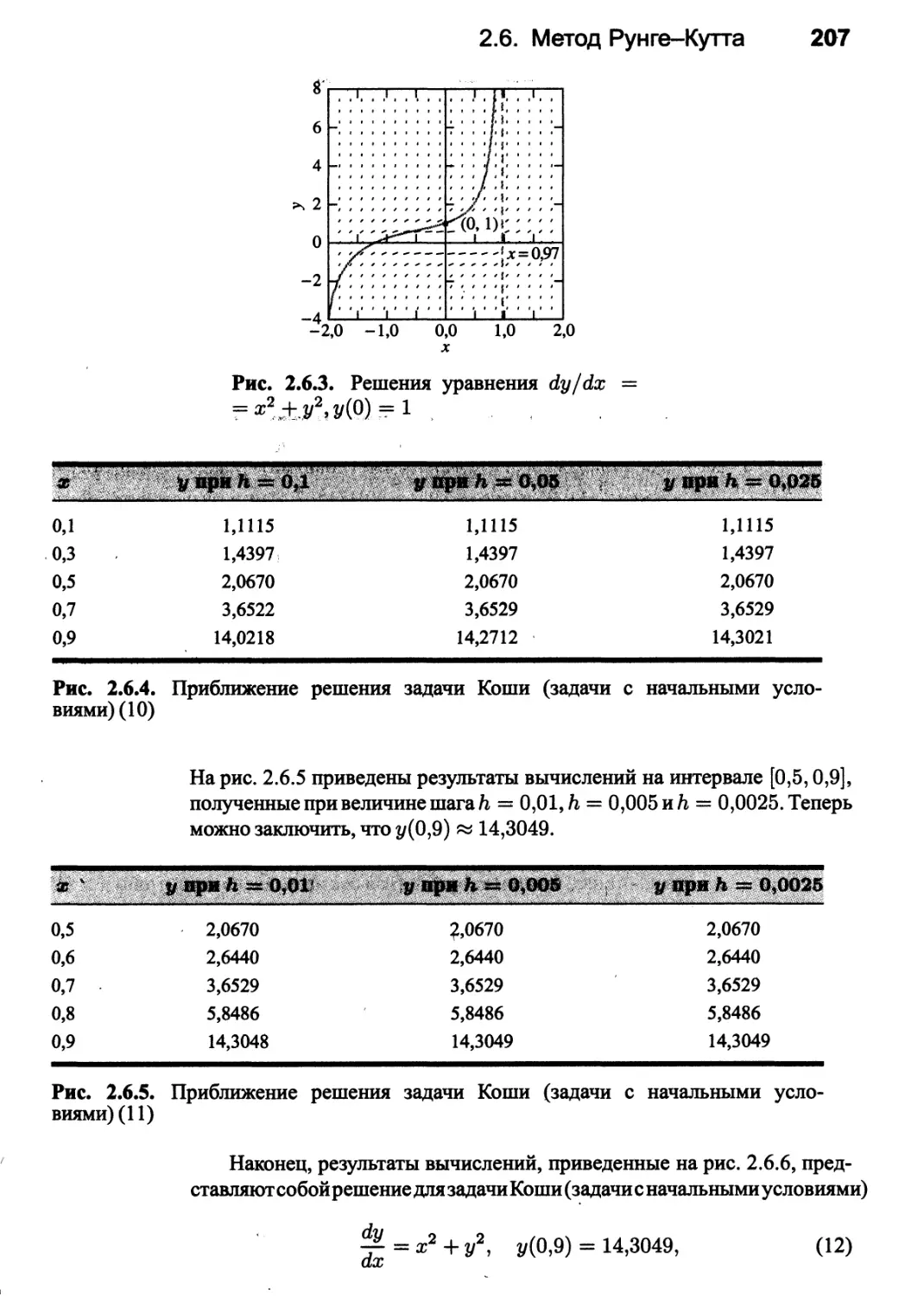
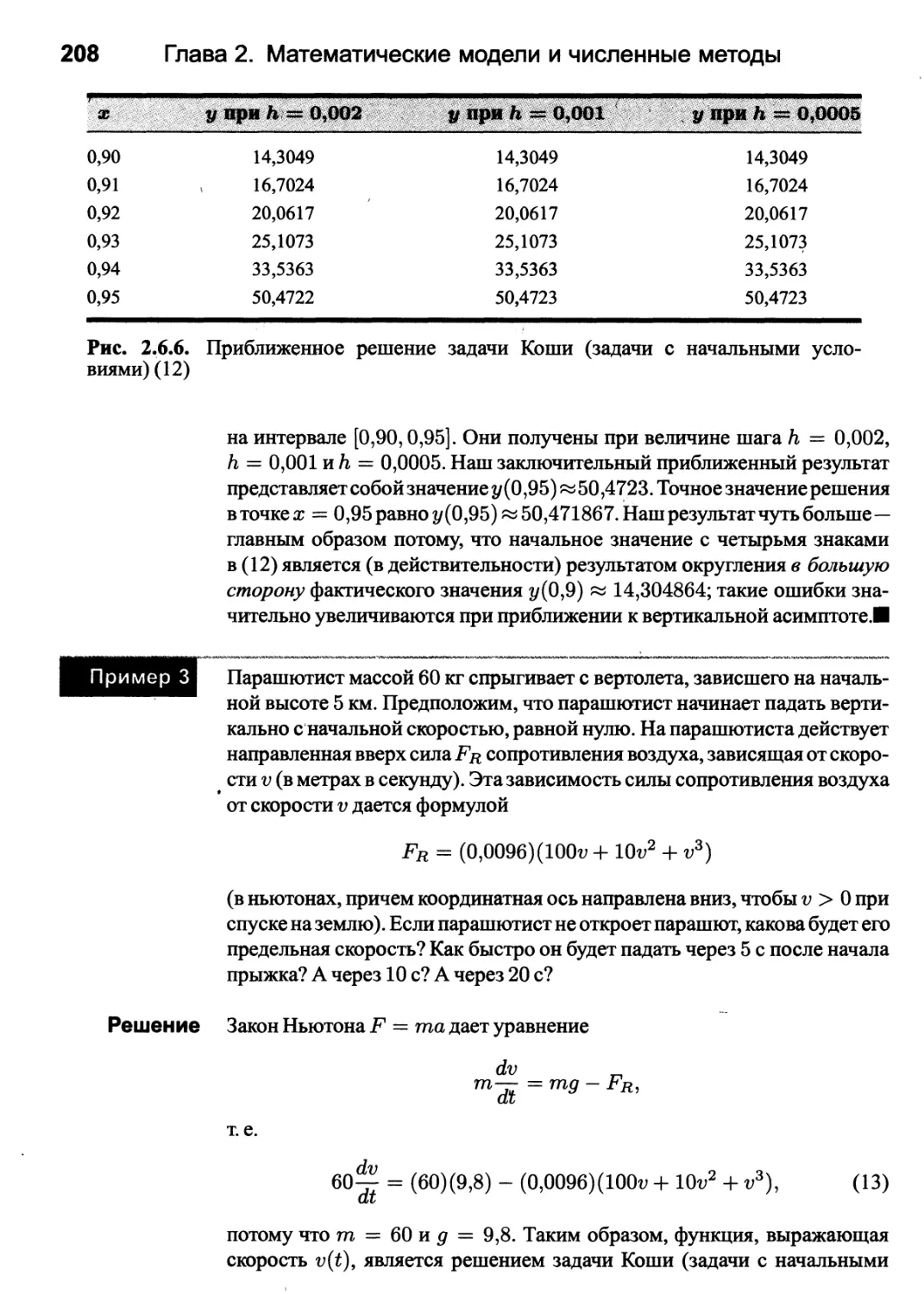
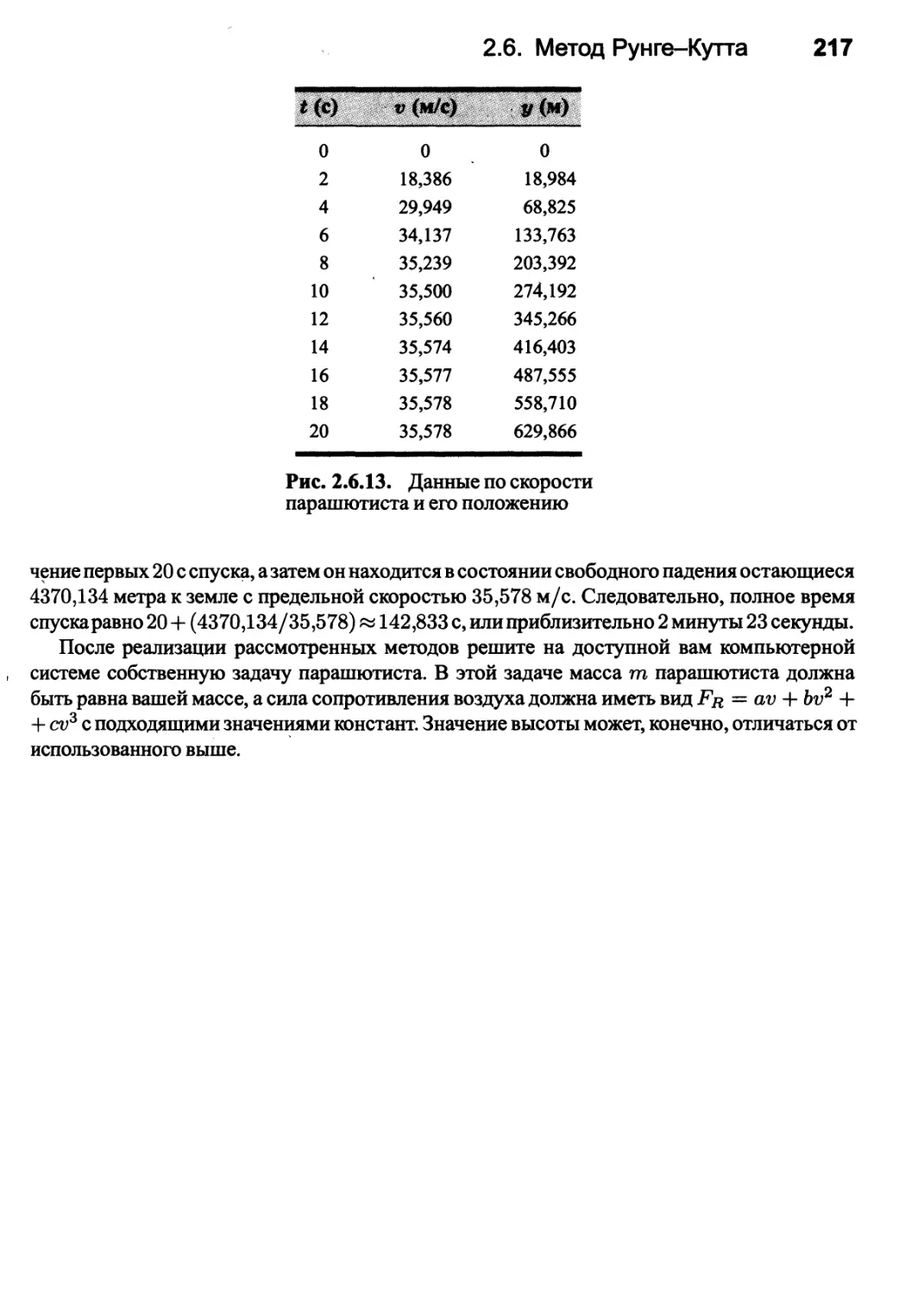
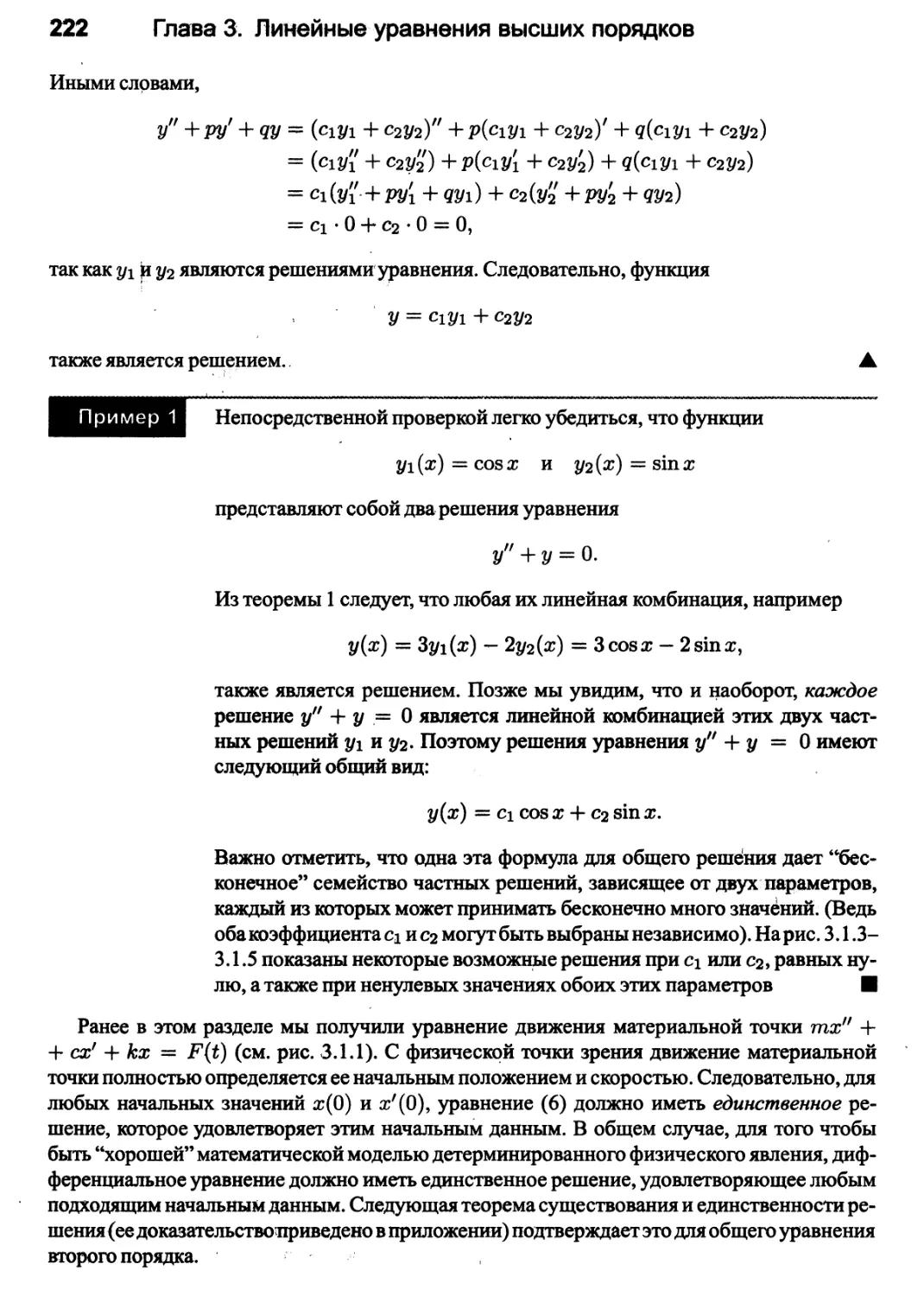
2.6 Метод Рунге-Кутта 203
ГЛАВА
3
Линейные уравнения высших
порядков 219
3.1 Введение: линейные уравнения второго порядка 219
3.2 Общие решения линейных уравнений 237
3.3 Однородные уравнения с постоянными
коэффициентами 254
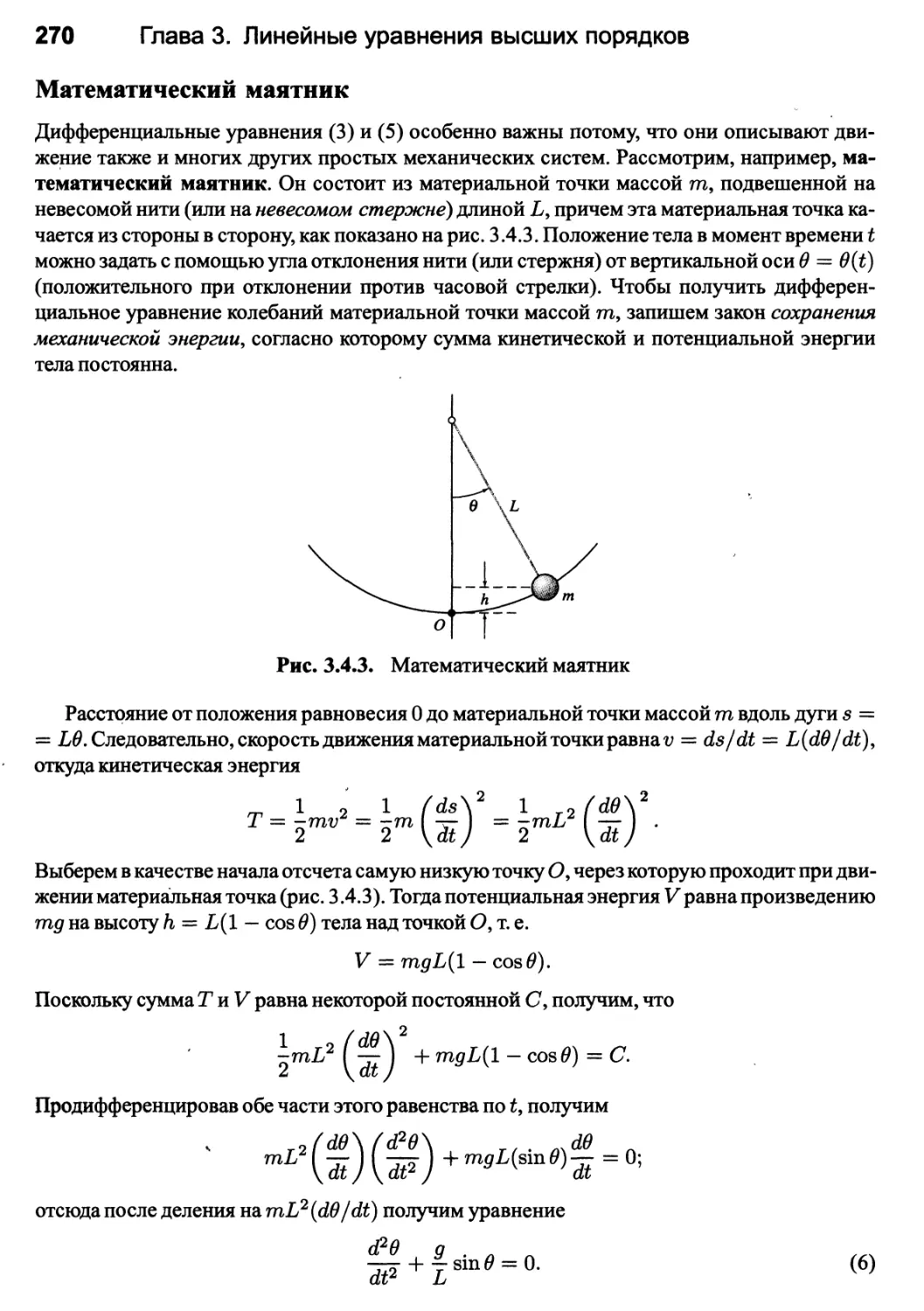
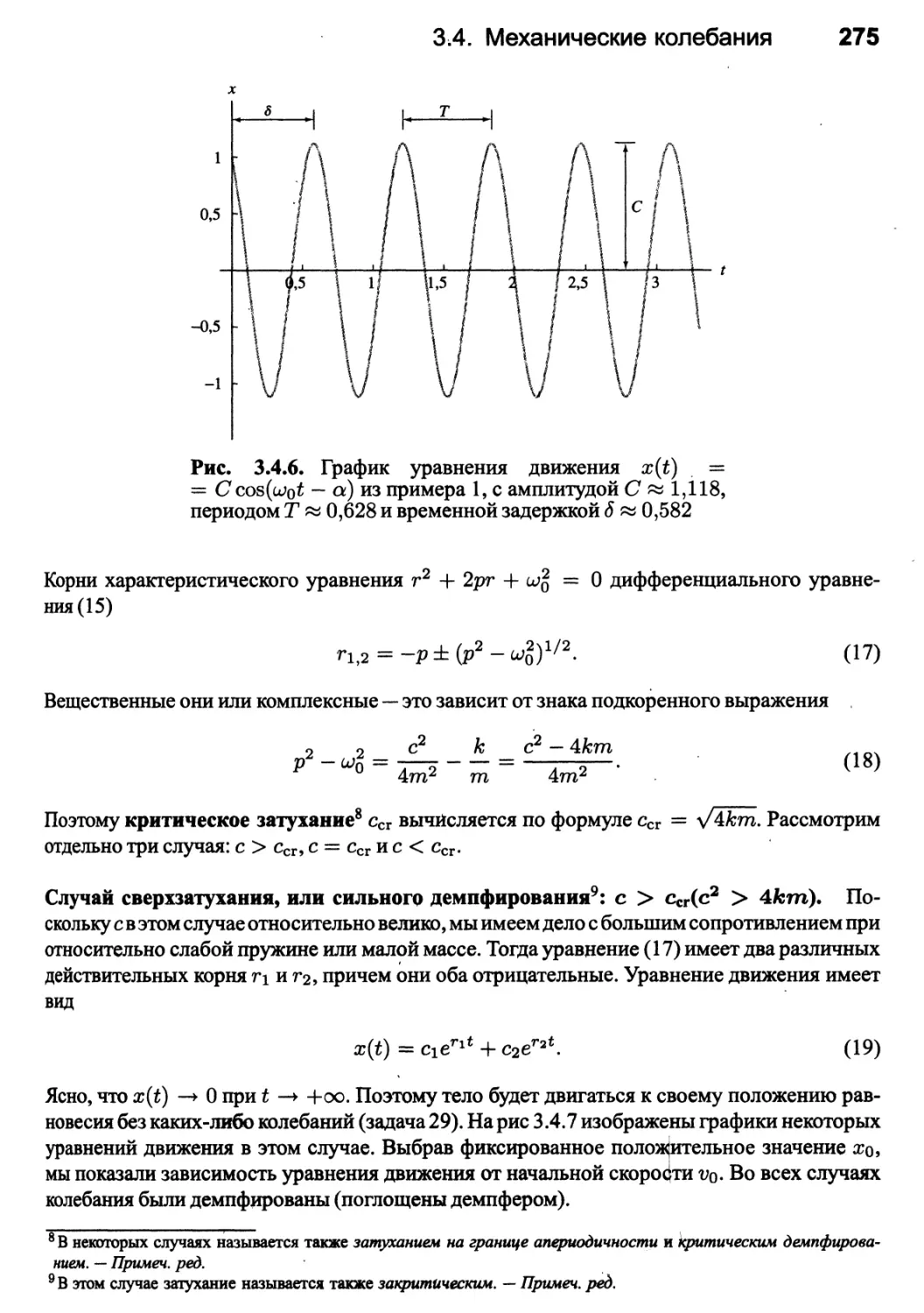
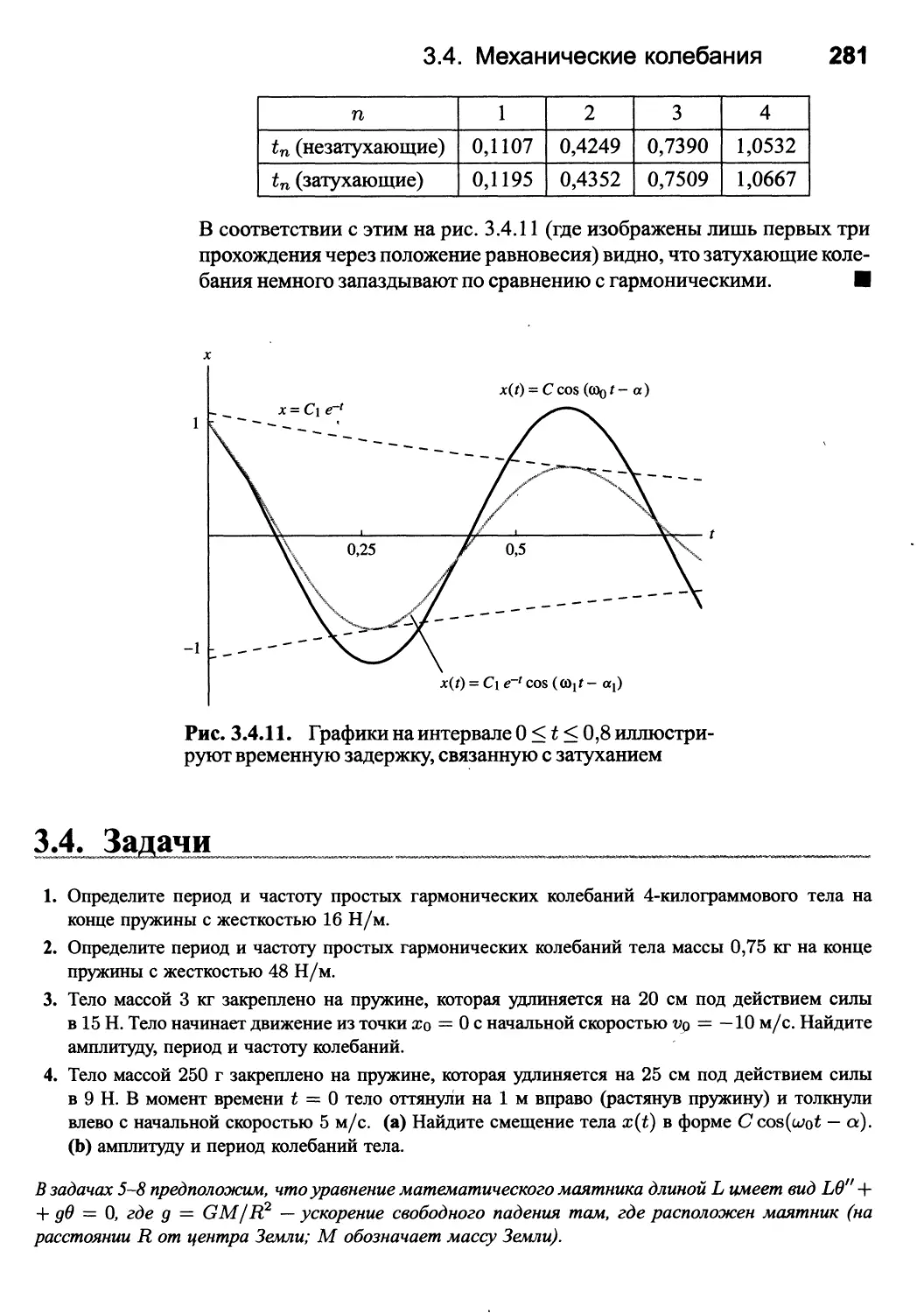
3.4 Механические колебания 268
3.5 Неоднородные уравнения и метод неопределенных
коэффициентов 286
Содержание 7
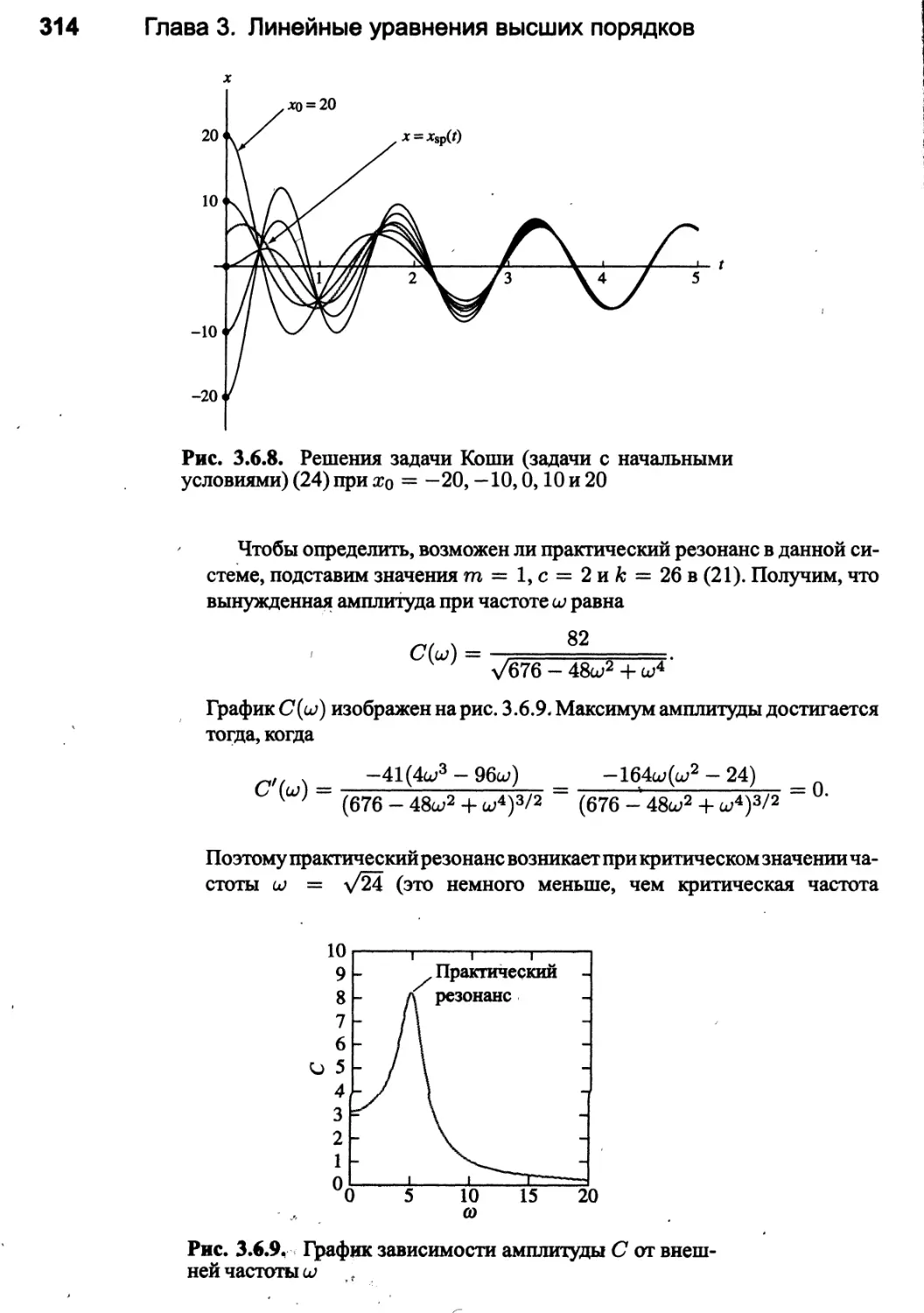
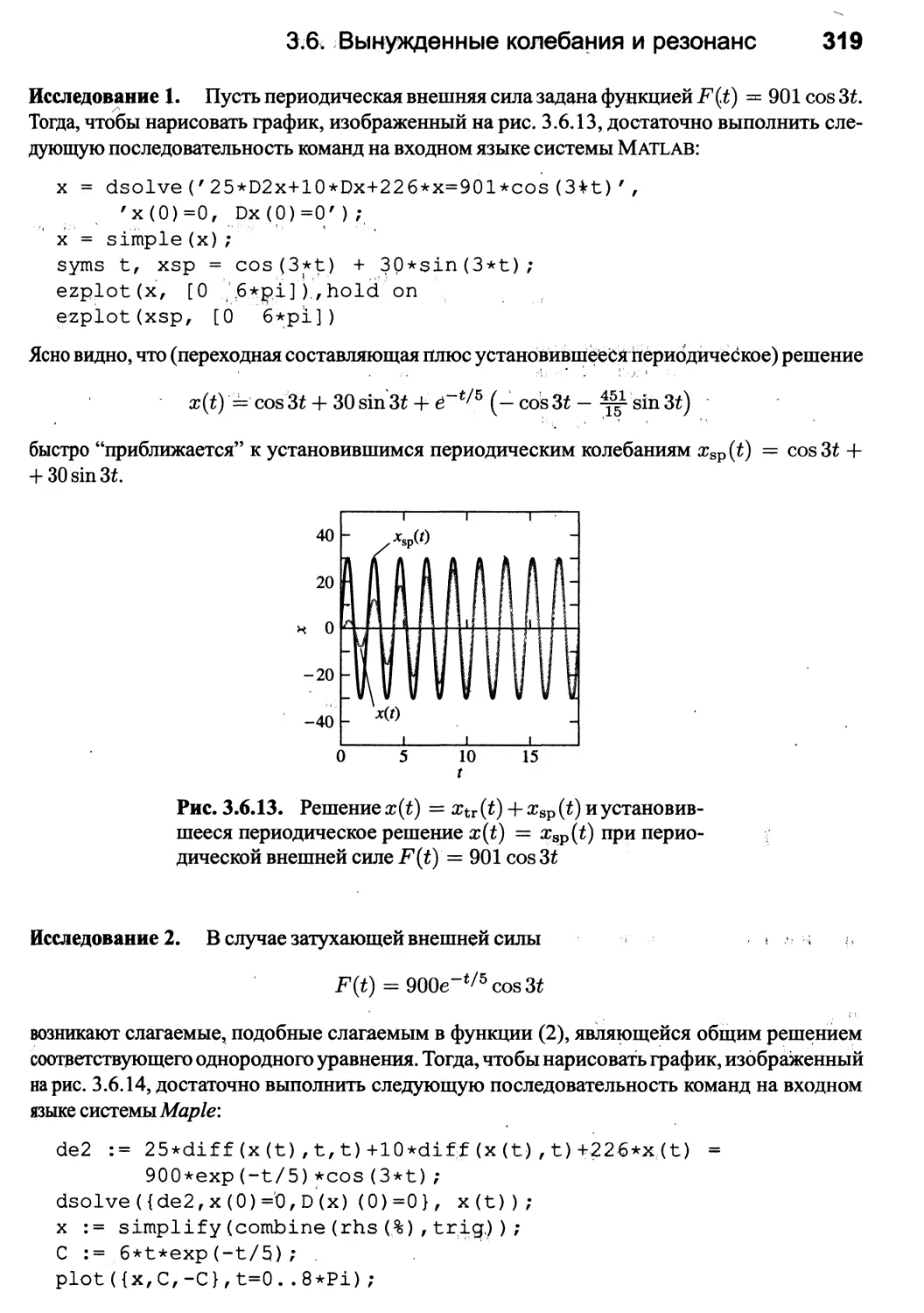
3.6 Вынужденные колебания и резонанс 303
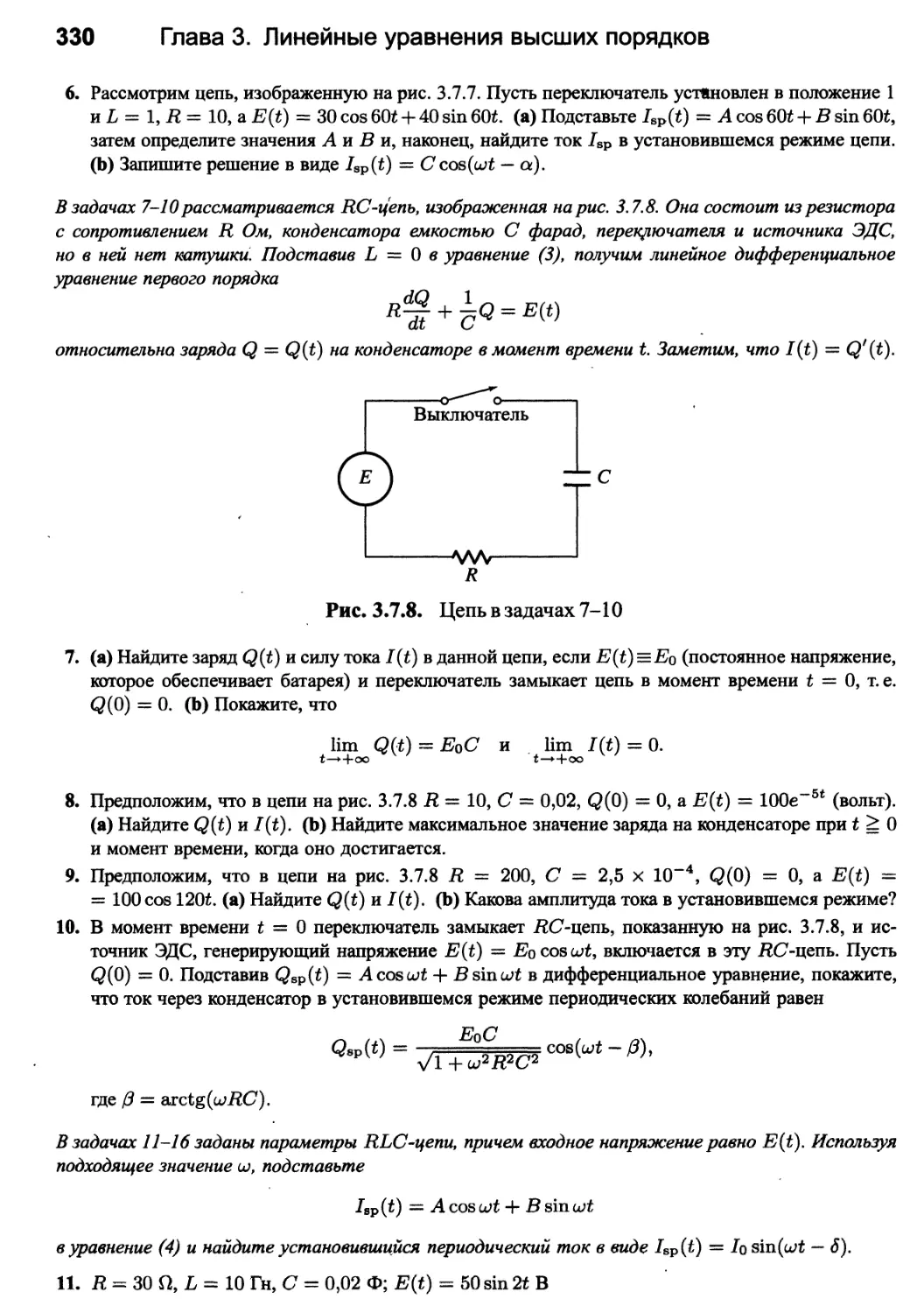
3.7 Электрические цепи 321
3.8 Краевые задачи и собственные значения 331
ГЛАВА
4
Введение в системы дифференциальных
уравнений 349
4.1 Системы первого порядка и их приложения 349
4.2 Метод исключения 368
4.3 Численные методы решения систем 381
ГЛАВА
5
Линейные системы дифференциальных
уравнений 401
5.1 Матрицы и линейные системы 401
5.2 Метод собственных значений для однородных
систем 423
5.3 Системы второго порядка и механические
приложения 444
5.4 Решения в случае кратных собственных значений 462
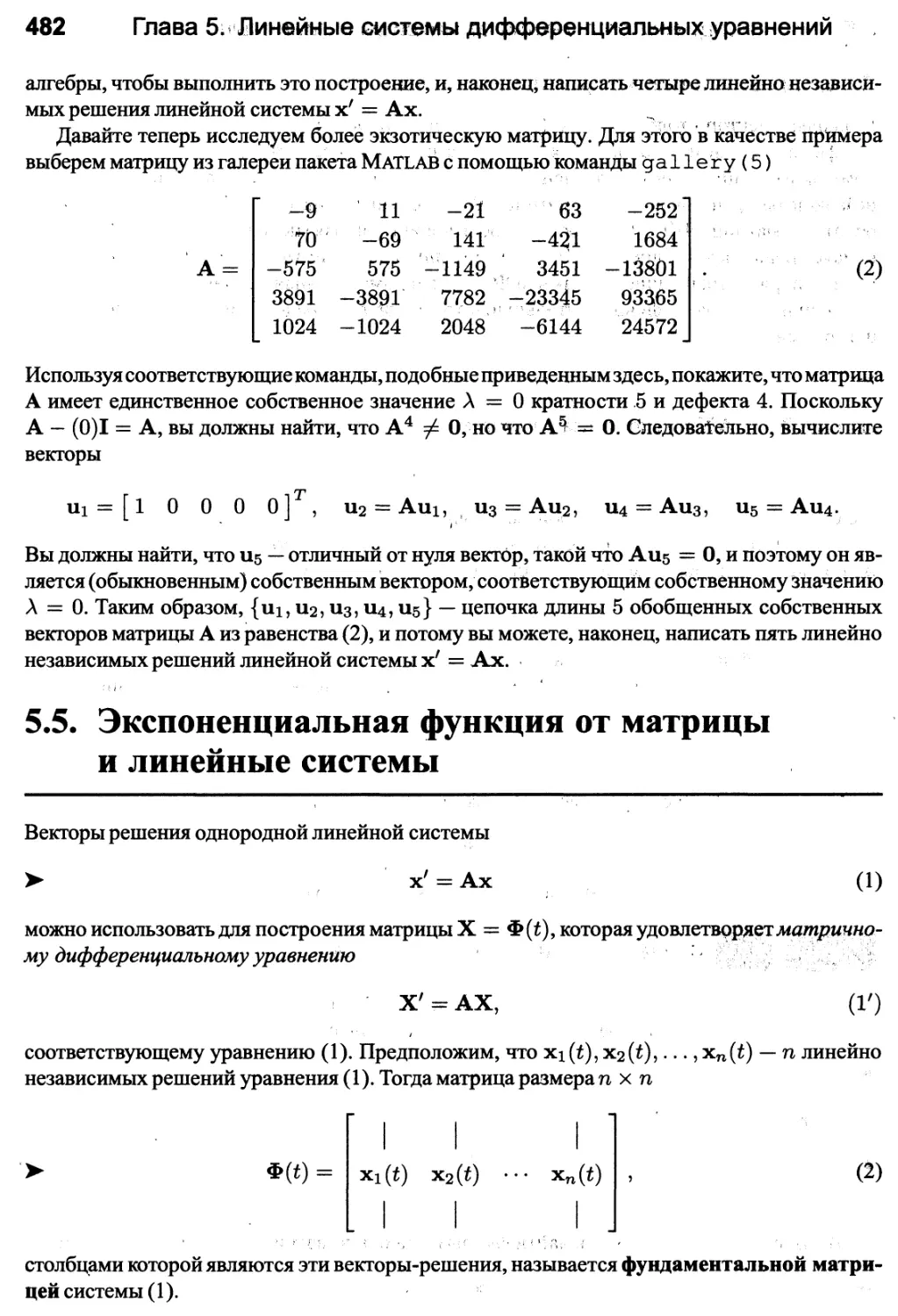
5.5 Экспоненциальная функция от матрицы и линейные
системы 482
5.6 Неоднородные линейные системы 498
ГЛАВА
в
Нелинейные системы и явления 509
6.1 Устойчивость и фазовая плоскость 509
6.2 Линейные и почти линейные системы 527
6.3 Экологические модели: хищники и конкуренты 549
6.4 Нелинейные механические системы 570
6.5 Хаос в динамических системах 592
ГЛАВА
7
Методы преобразования Лапласа 609
7.1 Преобразования Лапласа и оригиналы функций
(обратные преобразования) 609
7.2 Применение преобразования Лапласа к задачам Коши
(задачам с начальными условиями) 624
7.3 Сдвиг и элементарные дроби 639
7.4 Производные, интегралы и произведения
преобразований 652
8 Содержание
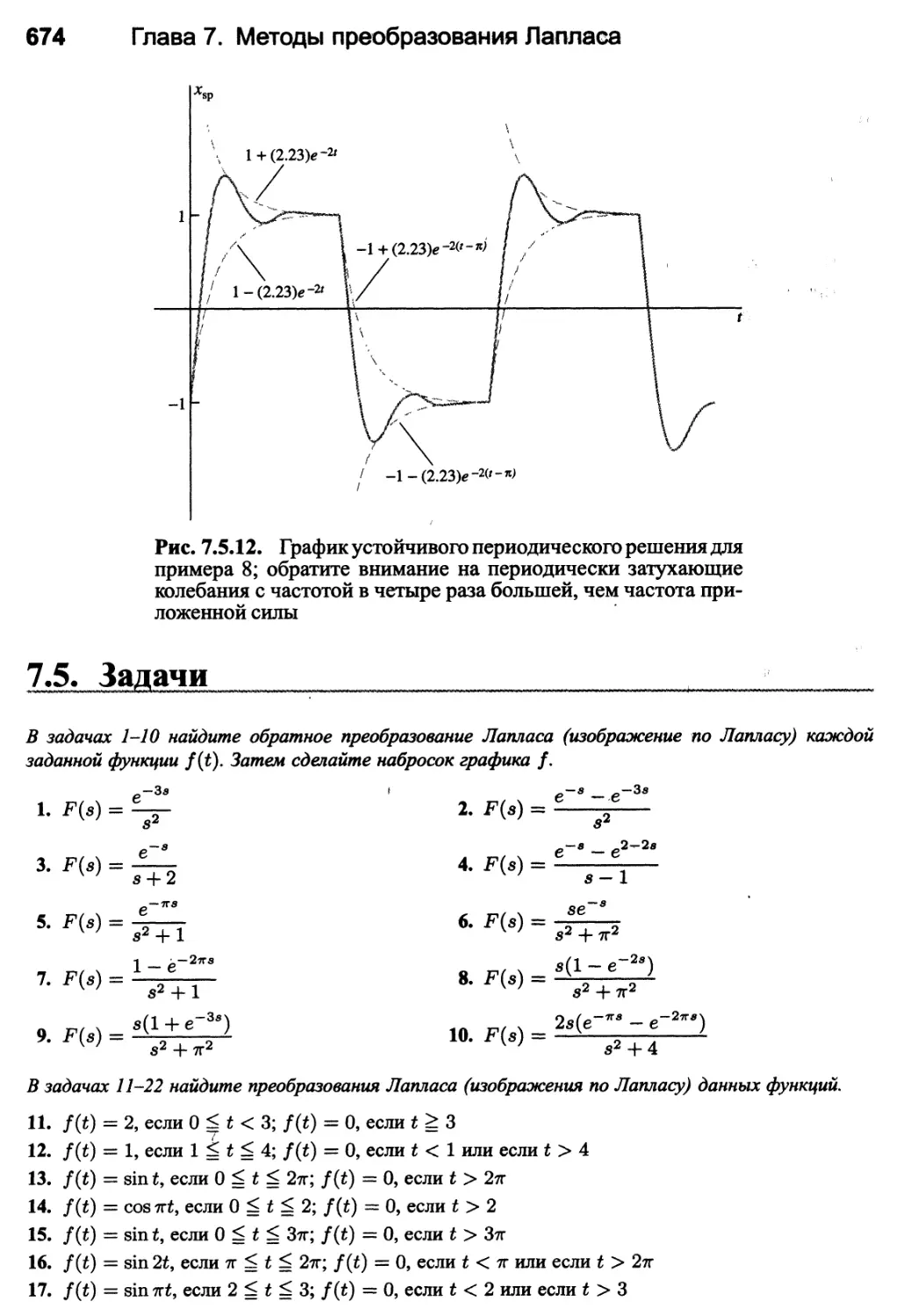
7.5 Периодические и кусочно-непрерывные входные
функции 661
7.6 Импульсы и дельта-функции 679
ГЛАВА
8
Методы степенных рядов 693
8.1 Введение и обзор теории степенных рядов 693
8.2 Решения в виде ряда в окрестностях обыкновенных
точек 709
8.3 Регулярные особые точки 724
8.4 Метод Фробениуса. Исключительные случаи 744
8.5 Уравнение Бесселя 761
8.6 Приложения функций Бесселя 773
ГЛАВА
9
Методы рядов Фурье 785
9.1 Периодические функции и тригонометрические
ряды 785
9.2 Ряд Фурье общего вида и сходимость 795
9.3 Ряды Фурье по синусам и косинусам 806
9.4 Приложения рядов Фурье 822
9.5 Теплопроводность и разделение переменных
9.6 Колебания струны и одномерное волновое
уравнение 849
9.7 Установившаяся температура и уравнение
Лапласа 866
829
ГЛАВА
10
Собственные значения и краевые
(граничные) задачи 881
10.1 Задачи Штурма-Лиувилля и разложения
по собственным функциям 881
10.2 Приложения рядов по собственным функциям
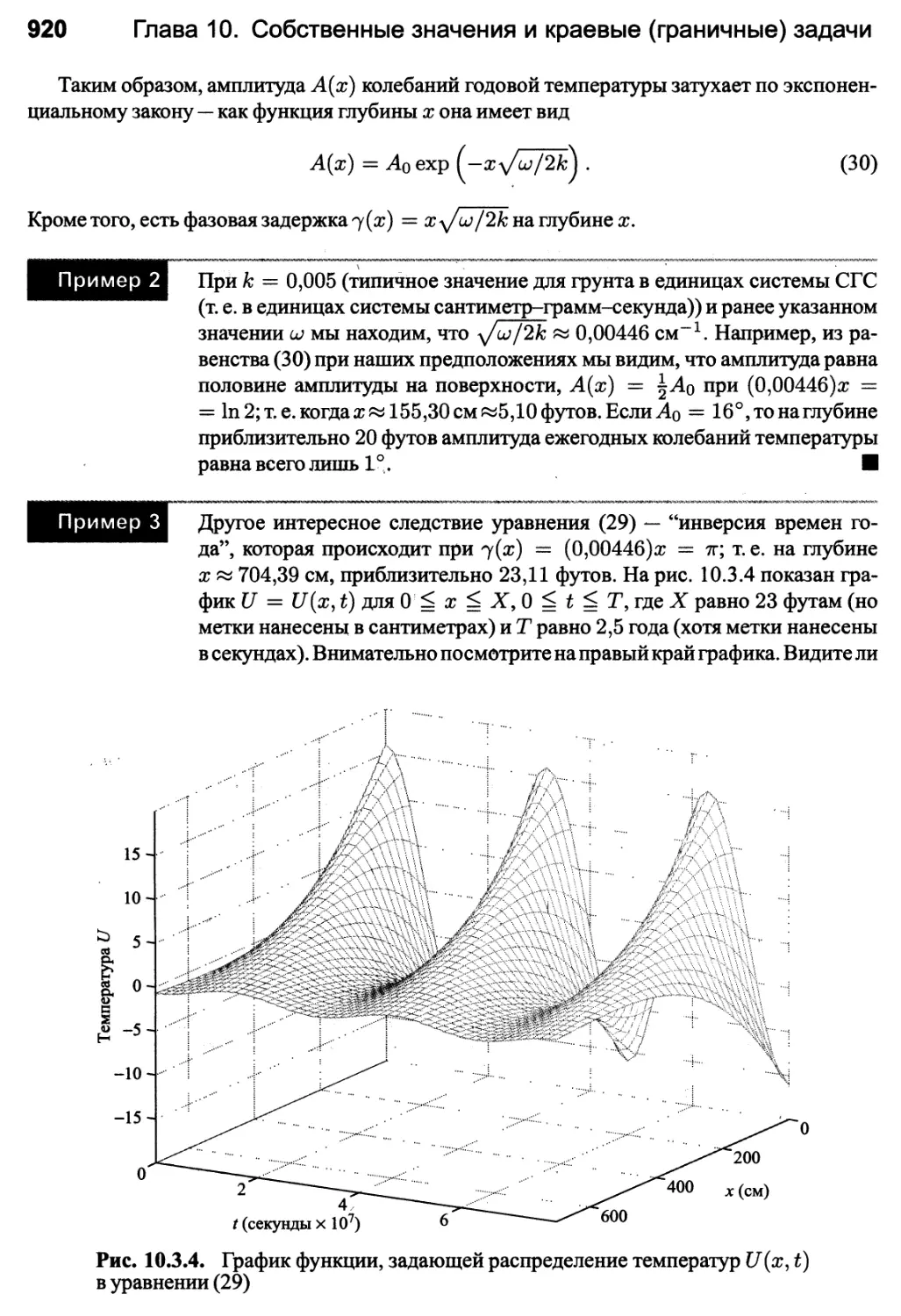
10.3 Установившиеся периодические решения
и собственные частоты 913
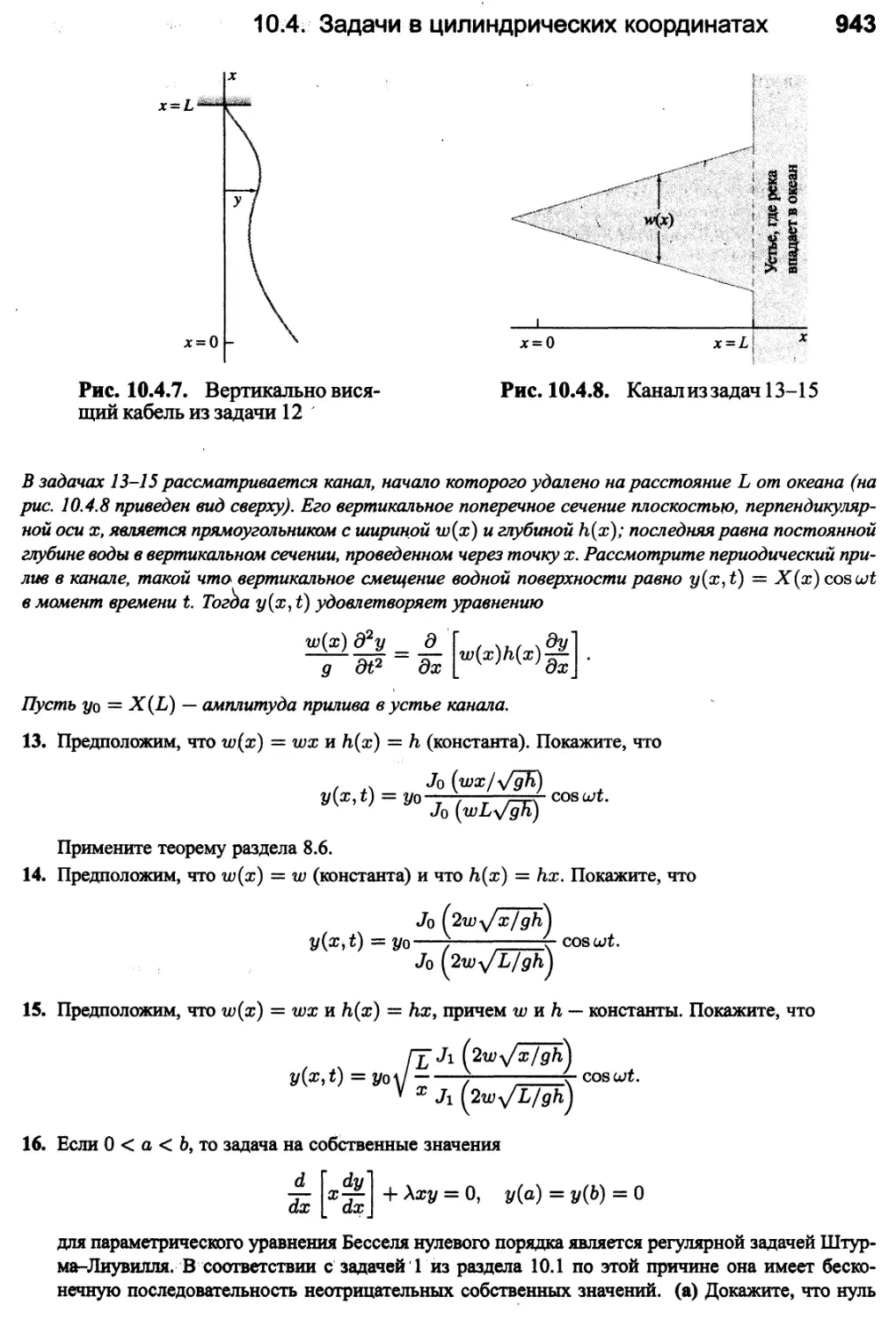
10.4 Задачи в цилиндрических координатах 927
10.5 Явления высших размерностей 947
898
Литература для дальнейшего изучения 970
Приложение. Существование и единственность решений
Ответы к избранным задачам 997
Предметный указатель 1087
979
Прикладные модули
Модули, перечисленные здесь, следуют за указанными разделами учебника. Наиболее
широко представлены вычислительные проекты, которые иллюстрируют содержание
соответствующих разделов учебника.
1.3 Машинно-генерируемые поля направлений и интегральные кривые
1.4 Логистическое уравнение
1.5 Колебания температуры внутри и вне помещения
1.6 Решения с помощью компьютерной алгебры
2.1 Моделирование численности популяции, подчиняющейся логистическому
закону
2.3 Движение ракеты
2.4 Реализация метода Эйлера
2.5 Реализация усовершенствованного метода Эйлера
2.6 Реализация метода Рунге-Кутта
3.1 Построение графиков семейства решений уравнений второго порядка
3.2 Построение графиков семейства решений уравнений третьего порядка
3.3 Приближенное решение линейных уравнений
3.5 Автоматизация вариации параметров
3.6 Вынужденные колебания
4.1 Гравитация и законы Кеплера движения планет
4.2 Решение систем с помощью компьютерной алгебры
4.3 Кометы и космический корабль
5.1 Автоматическое решение линейных систем
5.2 Автоматическое вычисление собственных значений и собственных
векторов
5.3 Колебания многоэтажных зданий, вызванные землетрясением *
5.4 Дефектные собственные значения и обобщенные собственные векторы
5.5 Автоматизация решения с помощью экспоненциальной функции от
матрицы
5.6 Автоматизация вариации параметров
6.1 Фазовые портреты и уравнения первого порядка
6.2 Фазовые портреты почти линейных систем о
6.3 Ваш собственный заповедник живой природы **
6.4 Уравнения Рэлея и Ван-дер-Поля
7.1 Выполнение преобразований с помощью компьютерной алгебры
и оригиналы функций (обратные преобразований)
7.2 Преобразования задач Коши (задач с начальными условиями)
7.3 Демпфирование и исследования резонанса
7.5 Конструирование функций
10
Прикладные модули
8.2 Автоматическое вычисление коэффициентов ряда
8.3 Автоматизация метода ряда Фробениуса
8.4 Исключительный случай: понижение порядка
8.6 Уравнения Риккати и модифицированные функции Бесселя
9.2 Вычисление коэффициентов Фурье с помощью компьютерной алгебры
9.3 Ряд Фурье кусочно-гладких функций
9.5 Исследование нагретого стержня
9.6 Исследование колебаний струны
10.1 Числовые разложения по собственным функциям
10.2 Численное исследование распространения тепла
10.3 Колебания балок и трамплины для прыжков
10.4 Функции Бесселя и распространение тепла в цилиндре
о
ПРЕДИСЛОВИЕ
Многие вводные курсы дифференциальных уравнений еще в недалеком прошлом
были ориентированы на формальное решение стандартных типов дифференциальных
уравнений. Поэтому в них значительную долю составляли систематические методы
(кажущиеся такими простыми в усвоении) поиска решения. Многие студенты
концентрировались на изучении и запоминании методов решения уравнений знакомых типов. Однако
данный учебник базируется на опыте преподавания курса, в котором большой акцент
делается на концептуальных идеях и использовании'программ-приложений и овладении
студентами вычислительных средств для приобретения более широкого опыта решения
задач.
Доступность технических вычислительных сред, подобных Maple, Mathematica
и Matlab, изменяет роль дифференциальных уравнений и возможности их
применения в науке и инженерном деле, и именно это обстоятельство нашло отражение в данном
учебнике. Новая технология мотивирует сдвиг акцента с традиционных ручных (с
карандашом и бумагой) методов на качественные и машинные, которые
• позволяют расширить диапазон реальных приложений;
• позволяют использовать как вычисления, так и средства графической визуализации
для углубленного понимания концепций;
• поощряют эмпирические исследования, которые позволяют глубже обдумать и
провести более глубокий анализ, чем стандартные задачи учебника.
Главные особенности
Следующие особенности этого учебника предназначены для поддержки современного
курса дифференциальных уравнений, в котором, помимо традиционных основных
навыков, студенты знакомятся с концептуальными перспективами, которые понадобятся
студентам для эффективного использования дифференциальных уравнений в их
последующей работе и учебе.
• Редко используемые темы были сильно сокращены, а новые темы добавлены, чтобы
сконцентрировать внимание как на основных методах, так и на качественных аспектах
темы, связанных с полями направлений, интегральными кривыми, фазовыми
портретами и динамическими системами. Мы объединяем символические, графические
и численные методы решения везде, где это кажется выгодным. Свежий
вычислительный подход очевиден в рисунках, примерах, задачах и приложениях всюду по
тексту. Приблизительно 15% примеров в тексте новы или недавно исправлены для
этого издания.
12 Предисловие
• В книге большое внимание уделяется линейным системам дифференциальных
уравнений, которые рассмотрены в главах 4 и 5 (вместе с необходимыми сведениями из
линейной алгебры), после которых в главе 6 рассматриваются нелинейные системы
и явления (включая хаос в динамических системах).
• Эта книга начинается и заканчивается обсуждением и примерами математического
моделирования явлений реального мира. Студенты учатся с помощью
математического моделирования и эмпирических исследований выводить уравнения, решать их
и извлекать полезную информацию из решения.
• Первый курс дифференциальных уравнений должен быть также окном в мир
математики. Хотя в элементарном курсе нельзя изложить доказательства фундаментальных
теорем существования и единственности, студенты должны знать точные и четкие
формулировки этих теорем и понимать их роль в теории. Мы включаем
соответствующее доказательство существования и единственности в приложение и иногда отсылаем
к нему читателя по ходу изложения.
• Хотя наш подход основан на широком использовании новых распространенных
компьютерных методов решения дифференциальных уравнений, студентов важно научить
и некоторым элементарным аналитическим методам решения (рассмотренным в
главах 1 и 3). Эффективное и надежное использование численных методов часто требует
предварительного анализа с помощью стандартных элементарных методов;
построение реалистической числовой модели часто базируется на изучении более простой
аналитической модели. Мы поэтому продолжаем подчеркивать важность овладения
мастерством традиционных методов решения (особенно акцентируя внимание на них
в обширных наборах задач).
Особенности вычислительного подхода ____
Следующие особенности подчеркивают особенности вычислительной технологии,
которая отличает большую часть нашего описания.
• Для этого издания создано почти 700 машинно-генерируемых рисунков, причем
более половины из них совершенно новые. В большинстве своем они сгенерированы
с помощью пакетов Mathematica и MATLAB. На них показаны высококачественные
изображения полей направлений, интегральных кривых и фазовых портретов,
которые "оживляют" символические решения дифференциальных уравнений. Например,
графики на обложке изображают собственную функцию трехмерного волнового
уравнения, которое описывает поверхностные волны на сферической планете. Эти графики
были созданы с помощью соответствующих функций Лежандра (см. раздел 10.5).
• Приблизительно 45 прикладных учебных модулей следуют сразу за ключевыми
разделами учебника. В .большинстве этих приложений иллюстрируется использование
технических средств вычислительных систем; в тексте этих разделов мы стремимся
привлечь студентов к активному применению новой технологии.
• Новинкой является акцент на численных методах, которые представлены довольно
ранним введением числовых методов решения в главе 2 (посвященной
математическим моделям и численным методам). Здесь и в главе 4 рассматриваются численные
методы решения систем уравнений, причем конкретная реализация численных алго-
Предисловие 13
ритмов представлена для систем уравнений параллельно для различных
компьютерных средств — от графических калькуляторов до MATLAB.
• Основные понятия демонстрируются с помощью вычислительных средств, что
позволяет более кратко и более просто, чем при традиционном подходе, охватить в главах 1,
3 и 5 некоторые традиционные физические темы (подобные точным уравнениям и
вариации параметров).
Математическое моделирование
Математическое моделирование — цель изучения дифференциальных уравнений, мы
постоянно побуждаем студентов заниматься им. Чтобы было легче представить широту
тематики приложении, взляните на следующий перечень вопросов, рассмотренных в этом
учебнике.
• Как объяснить обычно наблюдаемую задержку времени между ежедневными
колебаниями температуры внутри помещения и снаружи? (Раздел 1.5.)
• ' В чем отличие между Судным Днем и исчезновением популяций аллигаторов?
(Раздел 2.1.)
• Почему одноколесный велосипед и двуосный автомобиль по-разному реагируют на
неровности дороги? (Разделы 3.7 и 5.3.)
• Как предсказать момент следующего прохода недавно открытой кометы через
перигелий? (Раздел 4.3.)
• Почему землетрясение может уничтожить одно здание и совсем не повредить
ближайшее к нему? (Раздел 5.3.)
• Что определяет, будут ли два вида жить вместе в гармонии или конкуренция
(соревнование) кончится исчезновением одного из них и выживанием другого? (Раздел 6.3.)
• Почему и когда нелинейность приводит к хаосу в биологических и механических
системах? (Раздел 6.5.)
• Если по массивному телу на пружине периодически ударять молотком, то как
поведение этого массивного тела зависит от частоты ударов молотка? (Раздел 7.6.)
• Почему флагштоки обычно внутри пусты, а не представляют собой сплошное тело?
(Раздел 8.6.)
• Как объяснить различия в звучании гитары, ксилофона и барабана? (Разделы 9.6, 10.2
и 10.4.)
Организация и содержание
Мы изменили обычный подход и последовательность тем, чтобы воспользоваться
преимуществами новой технологии и открыть новые перспективы. В качестве примеров отметим
следующие особенности нашего подхода.
• После конспективного знакомства с уравнениями первого порядка в главе 1 (хотя
и с небольшим охватом некоторых традиционных символических методов) в главе 2
14 Предисловие
вниманию студентов предлагается весьма раннее введение в математическое
моделирование, устойчивость и качественные свойства дифференциальных уравнений, а
также знакомство с численными методами. При более традиционном подходе во вводном
курсе эти темы часто рассеиваются по разным главам.
• В главах 4 и 5 рассматриваются линейные системы. Мотивируемая текущими
тенденциями в науке и техническом образовании и практическими соображениями, глава 4
предлагает раннее интуитивное введение в системы первого порядка, модели и
численные методы приближенных вычислений. Глава 5 начинается с отдельного
независимого раздела, посвященного линейной алгебре, который необходим для того, чтобы
затем применить метод собственных значений к линейным системам. Область
приложения метода собственных значений весьма обширна (от железнодорожных вагонов
до землетрясений). В разделе 5.5 довольно полно представлена теория экспонент от
матрицы, которые применяются в разделе 5.6 к неоднородным линейным системам.
• В главе 6, посвященной нелинейным системам и явлениям, понятие фазовой
плоскости применяется для изучения самых разнообразных систем — от традиционных
экологических и механических системам до хаоса и бифуркации в динамических
системах (эти понятия рассмотрены в заключительном разделе). Раздел 6.5 представляет
элементарное введение в такие современные темы, как удвоение периода в
биологических и механических системах, диаграмма удвоения цикла и странный аттрактор
Лоренца (все это иллюстрируестся яркой компьютерной графикой).
• Методы преобразования Лапласа (изображения по Лапласу) (глава 7) и методы
степенных рядов (глава 8) следуют за материалом по линейным и нелинейным системам,
но могут быть рассмотрены сразу после главы 3 по желанию преподавателя.
• Главы 9 и 10 посвящены приложениям рядов Фурье, разделению переменных и
приложениям теории Штурма-Лиувилля к дифференциальным уравнениям в частных
производных и задачам, в которых заданы граничные (краевые) значения. После
введения ряда Фурье в последних трех разделах главы 9 обсуждаются три классических
уравнения — волновое, теплопроводности и уравнение Лапласа. В главе 10 методы
Штурма-Лиувилля изучаются настолько подробно, что студенты могут применить их
в некоторых довольно важных и вполне реальных приложениях.
Эта книга содержит материал различных по длительности курсов — от одной четверти
до двух семестров. Более краткая версия, Дифференциальные уравнения: вычислительные
аспекты и моделирование, заканчивается главой 7, посвященной методам
преобразования Лапласа (изображения по Лапласу). (Таким образом, в этом кратком варианте курса
придется опустить материал по методам степенных рядов, рядам Фурье, разделению
переменных и дифференциальным уравнениям в частных производных.)
Задачи, приложения и руководства по решению
Почти 20% текста и более чем 1900 задач в тексте были составлены заново для этого
издания или совсем недавно заменены с целью добавления графиков или качественной теории.
Соответственно раздел ответов теперь включает почти 300 новых машинно-генерируемых
рисунков, иллюстрирующих то, что, как ожидается, создадут студенты.
Предисловие 15
Раздел ответов для этого пересмотренного издания был значительно расширен, чтобы
увеличить его значение в качестве помощи при изучении. Теперь он включает
ответы на большинство задач с нечетными номерами, плюс очень много ответов на задачи
с четными номерами. Руководство для преподавателя Instructor's Solutions Manual @—13—
047578-5) (Справочник по решениям для преподавателя), содержащее 625 страниц,
содержит решения большей части задач из данной книги, а руководство для студента Student
Solutions Manual @-13-047579-3) (Студенческий справочник по решениям),
насчитывающее 375 страниц, содержит решения большей части задач* с нечетными номерами.
Приблизительно 45 прикладных модулей в тексте содержат дополнительный
прикладной материал и проекты, предназначенные в значительной степени для привлечения
студентов к исследованию и приложению вычислительных технологий. Эти
исследования значительно расширены в 325-страничном справочнике по приложениям Applications
Manual @-13-047577-7), который содержит новые исследовательские задачи. Каждый
раздел в этом справочнике имеет параллельные подразделы "Using Maple9'
(Использование Maple), "Using Mathematical (Использование Mathematica) и "Using MATLAB"
(Использование Matlab), которые детализируют применяемые методы для каждой системы
и предоставят студентам-пользователям возможность сравнить достоинства и стили
различных вычислительных систем.
Справочники по технологии и сайт _ _ _ _ _ __
Авторами написаны решения и справочники по приложениям, описанные ранее.
Кроме того, имеются следующие дополнительные справочники1 по технологии. Их можно
заказать с учебником, указав их номера ISBN.
• Учебник вместе с книгой Student Solutions Manual @-13-114492-8) (Студенческий
справочник по решениям)
• Учебник с книгой Applications Manual @-13-114491 -X) (Справочник по приложениям)
• Учебник с книгой Mathematica for Differential Equations: Projects, Insights, Syntax, and
Animations @-13-114489-8) (Дэвид Калвис, Mathematica для решения
дифференциальных уравнений: проекты, практика, синтаксис и мультипликации)
• Учебник с книгой Selwyn Hollis, A Mathematica Companion for Differential Equations
@-13-178327-0) (Применение системы Mathematica для решения дифференциальных
уравнений)
• Учебник с книгой Robert Gilbert & George Hsiao, Maple Projects for Differential Equations
@-13-178326-2) (Роберт Джилберт и Джордж Хсаяо, Проекты для Maple по решению
дифференциальных уравнений)
• Учебник с книгой John Polking & David Arnold, Ordinary Differential Equations Using
MATLAB, 2nd edition @-13-Q75668-7) (Джон Полкинг^и Дэвид Арнольд, Решение
обыкновенных дифференциальных уравнений с помощью Matlab, 2-е издание)
Тетради и рабочие листы, поддерживающие эти справочники, а также дополнительное
программное обеспечение, включая пакет рабочих листов для Maple, содержащий
ответы к этому учебнику, составлены Джоном Малоней (John Maloney); их можно загрузить
1 На английском языке, разумеется. — Примеч. ред.
16
Предисловие
с сайта www. prenhall. com/edwards. Многие рисунки, помещенные в этом учебнике,
были сгенерированы компьютером с использованием программ df ield и pplane,
написанных на входном языке системы Matlab Джоном Полкингом (John Polking), причем
на сайте имеются ссылки на эти программы. Есть еще один пакет по решению ОДУ на
основе Matlab с весьма внушительными графическими способностями. Это пакет lode
(см. www. math. uiuc. edu/iode). Он также упоминается в данном учебнике.
Благодарности
В подготовке этого пересмотренного издания мы получали огромную помощь и советы
следующих очень проницательных рецензентов.
Дэвид Калвис из Колледжа Болдуина-Уоллиса (David Calvis, Baldwin-Wallace College)
Мила Сенкл из Северо-Восточного Университета (Mila Cenkl, Northeastern University)
Кристофер Френч из Университета штата Иллинойс в Урбана-Шампейн (Christopher
French, University of Illinois at Urbana-Champaigri)
Моисей Гласнер из Пеннского государственного университета (Moses Glasner, Penn State
University)
Ричард Лоджезен из Университета штата Иллинойс в Урбана-Шампейн (Richard Laugesen,
University of Illinois at Urbana-Champaign)
Хуан Лопес из Аризонского государственного университета (Juan Lopez, Arizona State
University)
Джеймс Мозелей из Университета штата Западная Вирджиния в США (James Moseley,
West Virginia University)
Питер Мача из Технологического института Джорджии (Peter Mucha, Georgia Institute of
Technology)
Артур Уоссерман из Мичиганского университета (Arthur Wasserman, University of
Michigan) |
Мы благодарим Баяни ДеЛеона (Bayani DeLeon) за его всегда эффективное
руководство процессом книжного производства. Мы особенно благодарны нашему редактору,
Джорджу Лобеллу (George Lobell) за его обнадеживающую поддержку и советы, которые
в значительной степени повлияли на многие аспекты этой книги при ее
последовательных переизданиях. И это действительно настоящее удовольствие поблагодарить Денниса
Клетзинга (Dennis Kletzing) за его экстраординарное использование системы верстки Т^Х
для придания привлекательного представления тексту и рисункам в этой книге.
С. Н. Е.
hedwards@math.uga.edu
Athens, Georgia, U.S.A.
(г. Агенс, штат Джорджия, США)
D. E. P.
dpenney@math.uga.edu
Athens, Georgia, U.S.A.
(г. Агенс, штат Джорджия, США)
Предисловие 17
Предисловие к русскому изданию
После того как Ньютон решил задачу Кеплера, теория обыкновенных
дифференциальных уравнений стала одним из основных инструментов математического естествознания.
О Поэтому математическое образование специалиста любой естественнонаучной
специальности не обойдется без курса дифференциальных уравнений. Для многих же
естественнонаучных специальностей теория обыкновенных дифференциальных уравнений — вообще
центральная в математической составляющей образования. По этой причине
существуют многочисленные курсы дифференциальных уравнений, ориентированные на самые
разные аудитории — от школьников до аспирантов.
Каким же должен быть первый нормативный курс дифференциальных уравнений?
Каждая эпоха давала свой и даже несколько ответов на этот вопрос. Конечно, в XX
столетии был создан ряд очень хороших курсов, заслуженно ставших классическими. Тем
не менее, ни один из этих курсов (и даже их теоретико-множественное объединение!)
не могло удовлетворить запросы будущих специалистов самых разных профилей.
Курсы, созданные в начале прошлого века, отражали методы решения дифференциальных
уравнений, которые были разработанные математиками в основном для решения
физических задач. Для этого были выделены классы (типы) уравнений, решаемые в квадратурах.
Однако уже к началу XX столетия была осознана важность уравнений, не решаемых
в квадратурах, и возникли вопросы (устойчивость, асимптотическая устойчивость и др.),
ответить на которые нужно было независимо от существования решения в квадратурах
или специальных функциях. Возникла даже новая ветвь — качественная теория
дифференциальных уравнений. А в 1930-х годах стало абсолютно понятно, что дифференциальные
уравнения играют важную роль и в автоматике. Притом эта роль оказалась настолько
важной, что ее пришлось отразить уже во вводном (первом) курсе дифференциальных
уравнений. В 40-50-х годах приходилось решать такое разнообразное множество
дифференциальных уравнений, что уже нельзя было полагаться на заранее заготовленные
аналитические методы решения дифференциальных уравнений хорошо изученных типов
и на ручное применение немногочисленных разработанных к тому времени численных
методов. Численное решение дифференциальных уравнений — пожалуй, одна из самых
важных (если не самая важная) задач, ради которых и было начато создание первых
автоматических цифровых вычислительных машин. И поэтому естественно, что в лучших
курсах дифференциальных уравнений 1940-50-х годов численные методы нашли более
полное отражение, чем в предыдущие десятилетия. В 60-70-е годы дифференциальные
уравнения становятся важным инструментом не только в теории автоматического
регулирования, но и в исследовании динамических систем и хаотических явлений. И в эти
же годы выявляются недостатки численных методов, подчас приводящие к техногенным
катастрофам. Выясняется, что роль аналитических методов была незаслуженно
преуменьшена. В 1980-е годы дифференциальные уравнения активно используются для построения
самых разных моделей — физических, экономических, биологических, географических,
экологических, геологических и многих других.
К концу второго тысячелетия стало понятно, что вводный курс дифференциальных
уравнений нельзя построить, механически опустив одну из упомянутых выше тем. Но
как вместить их все в ограниченный по объему (одно- или двухсеместровый, только
100 академических часов) первый вводный курс дифференциальных уравнений?
18 Предисловие
Предлагаемая вашему вниманию книга как раз и есть ответ на этот вопрос, притом,
по нашему мнению, один из лучших. Вкратце отметим те особенности книги, благодаря
которым авторам как раз и удалось вместить весьма обширный материал в первом вводном
годовом (или даже семестровом) курсе дифференциальных уравнений.
Во-первых, авторы книги не ставят задачу перечислить (фактически неисчислимое)
множество моделей. Вместо этого они учат студентов строить такие модели
самостоятельно, притом в самых разных областях знания — как естественнонаучных (механика,
физика, химия, биология), так и гуманитарных (социология, статистика).
Во-вторых, авторы не занимаются (бесполезным) натаскиванием в решении
многочисленных типов дифференциальных уравнений, а учат студентов использовать
математические пакеты (в первую очередь это Mathematica), в которых интегрированы
многочисленные методы (численные и аналитические) решения дифференциальных
уравнений. Именно благодаря этому авторам удалось вместить в этот курс все то, что должны
узнать инженеры из вводного курса дифференциальных уравнений, а не
сконцентрироваться на одной (хотя бы и весьма важной!) теме курса дифференциальных уравнений.
По этой же причине данный курс будет интересен и студентам математических
факультетов университетов: благодаря такому курсу первое знакомство с естественнонаучными
приложениями дифференциальных уравнений (да и самими численными методами) не
будет омрачено трудоемкими расчетами по численным методам. И именно благодаря
такому курсу студенты-математики могут познакомиться со всем разнообразием
дифференциальных уравнений, а не ограничиться несколькими (хотя и весьма современными)
темами из курса дифференциальных уравнений.
Вероятно, на использовании математических пакетов в первом вводном курсе
дифференциальных уравнений стоит остановиться подробнее, потому что это — неотъемлемая
часть данного курса. Использование этих пакетов нельзя отложить "на потом" или
вынести в отдельный практикум точно так же, как нельзя требовать, чтобы студенты решали
дифференциальные уравнения в уме, а уж потом переходили к применению "чернил и
бумаги". Нет, при изучении данного курса дифференциальных уравнений студенты
постоянно должны пользоваться математическими пакетами — это так же естественно в начале
третьего тысячелетия, как и использование "чернил и бумаги" в начале XX века. Дело
в том, что такие системы компьютерной алгебры, как Mathematica и Maple, — это не
просто некие вспомогательные средства, нечто вроде универсальных языков
программирования. Каждый такой пакет представляет собой не просто язык программирования, а еще
и справочную систему, настоящую (как правило, весьма полную) энциклопедию по
дифференциальным уравнениям. В этих пакетах содержатся сведения и методы, которые по
необходимости из-за ограниченного объема первого курса дифференциальных уравнений
' опускаются в учебнике (и на лекциях), но которые совершенно необходимы для изучения
моделей — как рассматриваемых в учебнике и на лекциях, так и построенных
студентами самостоятельно. Поэтому на лекциях студенты не должны отвлекаться на написание
конспектов (выдать их в начале семестра — это обязанность лектора, точнее факультета),
а с помощью своих ноутбуков активно изучать модели, предлагаемые лектором. Именно
активное использование таких систем компьютерной алгебры, как Mathematica и Maple,
позволяет тренировать студентов не столько в умении производить нудные вычисления,
сколько в умении изучать реальные математические модели и сосредоточиться на
изучении существенных (с точки зрения современной теории дифференциальных уравнений)
особенностей построенных студентами моделей. Даже если лектор из-за ограниченности
объема курса и пропустит какой-нибудь метод, нужный для изучения конкретной моде-
Предисловие 19
ли, система компьютерной алгебры Mathematica (или Maple) о нем (как правило) знает
и поможет студенту воспользоваться таким методом. Зато лектор может поставить перед
студентом действительно важный вопрос о качественном поведении изучаемой системы.
Более того, преподаватель (при наличии времени, например, в годовом курсе) может
привлекать студентов к разработке не только индивидуальных проектов, но и групповых.
В них он сможет ставить задачу изучения системы с разных точек зрения, иногда такие
задания полезно давать так, чтобы они упредили изучение теории, излагаемой в
лекционном курсе. Тогда студенты будут лучше подготовлены к изучению самых современных
разделов теории дифференциальных уравнений, таких как, например, хаос в
динамических системах. Более того, при таком подходе студенты будут готовы к самостоятельному
дальнейшему применению математических моделей. И позвольте нам выразить надежду,
чтЪ тем самым они будут готовы попытаться объять необъятное! И именно на этой ноте
мы желаем вам интересного, активного и несомненно увлекательного чтения.
В. Штонда,
viktor@shtonda.com
Я. Шмидский,
smith@dialektika.com
U_uuuii:A
1 (fji* ^ " I4 s
hr0rrH
'^U--^
ГЛАВА
Дифференциальные
уравнения первого порядка
1.1. Дифференциальные уравнения
и математические модели
Законы Вселенной написаны на языке математики. Алгебра решает много задач с
постоянными величинами, но самые интересные природные явления включают изменение
и описываются уравнениями, которые связывают изменяющиеся величины.
Поскольку производная dx/dt = f'(t) функции / является скоростью изменения
величины х = f(t), которая зависит от независимой переменной t, естественно, что уравнения,
содержащие производные, часто используются для описания изменений, происходящих
во Вселенной. Уравнение, связывающее неизвестную функцию и одну или несколько ее
производных, называют дифференциальным уравнением.
Пример 1
Дифференциальное уравнение
dt
содержит и неизвестную функцию x(t), и ее первую производную
x'(t) = dx/dt. Дифференциальное уравнение
dxz dx
содержит неизвестную функцию у независимой переменной х и первые
две производные у' и у" функции у. ■
Изучение дифференциальных уравнений имеет три основных цели.
22 Глава 1. Дифференциальные уравнения первого порядка
1. Научиться составлять дифференциальное уравнение, которое описывает
изучаемое физическое явление.
2. Найт — точно или приблизительно — соответствующее решение полученного
уравнения.
3. Интерпретировать найденное решение.
В алгебре мы обычно ищем неизвестные числа, которые удовлетворяют какому-нибудь
уравнению, например ж3 4- 7х2 ~ Их 4- 41 = 0, Однако при решении дифференциального
уравнения нам необходимо найти неизвестные функции у = у(х), для которых
выполняется тождество типа у'{х) = 2ху(х) на некотором интервале вещественных чисел. Обычно
нужно найти все решения дифференциального уравнения, если это возможно.
Пример 2
Если С — константа и
у(х) = Се*\ A)
ТО
^ = С Bхе*2) = Bх) (Се*2) = 2ху.
Таким образом, каждая функция у(х) вида A) удовлетворяет
дифференциальному уравнению
.*-*, B)
для всех х. В частности, равенство A) определяет бесконечное
семейство различных решений этого дифференциального уравнения, — по
одному решению для каждого значения произвольной постоянной С.
Методом разделения переменных (подробности в разделе 1.4) можно
показать, что каждое решение дифференциального уравнения B) имеет
форму, указанную в равенстве A). ■
Дифференциальные уравнения и математические модели
Следующие три примера иллюстрируют процесс перевода научных законов и принципов
на язык дифференциальных уравнений. В каждом из этих примеров независимой
переменной является время £, но мы увидим многочисленные примеры, в которых другая
величина, а не время, служит независимой переменной.
Пример 3
Закон охлаждения, установленный Ньютоном, может быть
сформулирован так: скорость изменения (в данном случае, конечно, имеется в виду
скорость изменения относительно времени t) температуры T(t) тела
пропорциональна разности между Т и температурой окружающей
среды А (рис. 1.1.1). Иными словами,
^ = -к(Т-А), C)
где к — положительная константа. Заметьте, что если Т > А, то dT/dt <
< О, так как температура — убывающая функция времени t, и тело
охлаждается. Но если Т < А, то dT/dt > 0, так что Т увеличивается.
1.1. Дифференциальные уравнения и математические модели
23
Таким образом, физический закон представлен в виде
дифференциального уравнения. Если нам известны значения к и А, мы должны
найти явную формулу для T(t), а затем с помощью этой формулы мы
сможем предсказать температуру тела в будущем. ■
Рис. 1.1.1. Закон охлаждения,
установленный Ньютоном, т. е. равенство C),
описывает охлаждение горячего камня в воде
Рис. 1.1.2. Закон вытекания Тор-
ричелли, т. е. уравнение D),
описывает вытекание воды из резервуара
Пример 4
Закон Торричелли подразумевает; что скорость изменения объема V
воды в резервуаре, из которого вытекает вода (рис. 1.1.2),
пропорциональна квадратному корню из глубины у воды в резервуаре:
dy и г
D)
где к — константа. Если резервуар — вертикальный цилиндр с площадью
поперечного сечения А, то V = Ау, так что dV/dt = A-(dy/dt). В этом
случае уравнение D) имеет вид
dy
dt
3—*vfc
E)
где h = к/А — константа.
Скорость изменения численности населения P(t) с постоянными
показателями рождения и смертности во многих простых случаях
пропорциональна к численности населения. Иными словами,
где к — коэффициент пропорциональности.
F)
Давайте обсудим пример 5 далее. Сначала обратите внимание, что каждая функция
вида
P(t)=Ce
kt
G)
24 Глава 1. Дифференциальные уравнения первого порядка
является решением дифференциального уравнения F)
dt
Мы проверяем это утверждение следующим образом:
P'(t) = Ckekt = к (Cekt) = kP(t)
для всех вещественных чисел t. Поскольку подстановка каждой функции вида G) в
уравнение F) порождает тождество, все такие функции — решения уравнения F).
Таким образом, даже если значение константы fc известно, дифференциальное
уравнение dP/dt = кР имеет бесконечно много различных решений вида P(t) = Cekt — по
одному для каждого значения "произвольной" константы С. Это типично для
дифференциальных уравнений. Это также полезно, потому что благодаря этому можно использовать
дополнительную информацию для выбора из множества всех этих решений того частного
решения, которое удовлетворяет условиям изучаемой задачи.
Пример б
Предположим, что P(t) = Cekt — численность колонии бактерий в
момент времени t9 что численность колонии в момент времени t = 0
(часы) была равна 1000 и что количество бактерий удваивается через
каждый час. Эта дополнительная информация о P(t) приводит к
следующим уравнениям:
1000 = Р@) = Се° = С,
2000 = РA) = Сек.
Из этого следует, что С — 1000 и что ек = 2, так что к = In 2^0,693147.
При этом значении fc дифференциальное уравнение F) принимает вид
^ = Aп2)Р w @,693147)Р
dt
Замена fc = In 2 и С = 1000 в уравнении G) дает частное решение
P{t) = 1000e(ln2)t = 1000(е1п2)' = 1000 • 2* (потому что е1п2 = 2),
которое удовлетворяет указанным условиям. Мы можем использовать
это частное решение, чтобы предсказать численность колонии
бактерий в будущем. Например, предсказанная численность бактерий после
полутора часов (когда t = 1,5) равна
РA,5) = 1000 • 23/2 « 2828. ■
Условие Р@) = 1000 в примере 6 называют начальным условием, потому что мы
часто пишем дифференциальные уравнения, для которых t = 0 является "временем
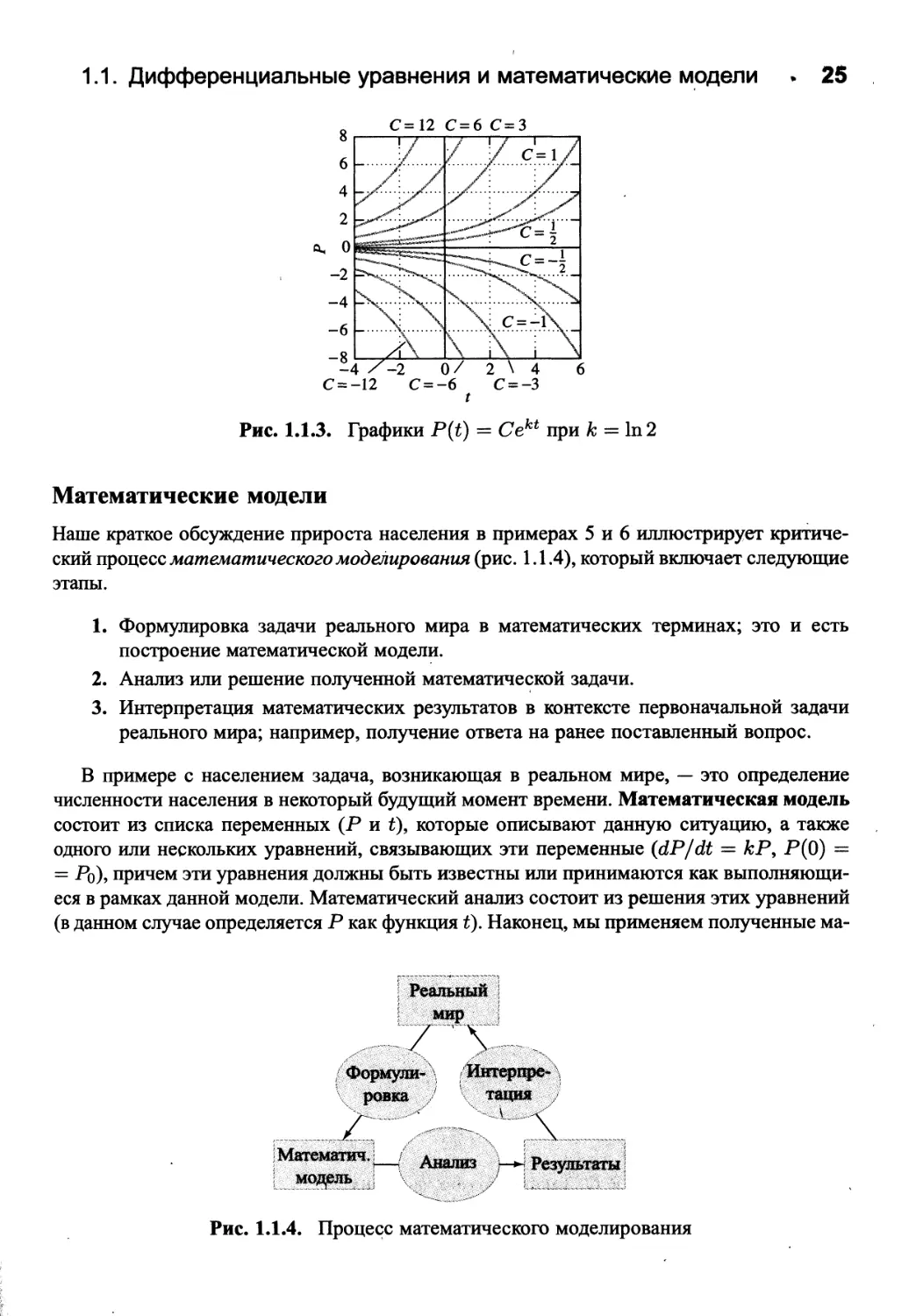
пуска". На рис. 1.1.3 показано несколько различных графиков функции вида P(t) = Cekt
при fc = In 2. Графики всего бесконечного множества решений dP/dt = fcP фактически
заполняют всю двумерную плоскость, и никакие два из них не пересекаются. Кроме того,
выбор любой точки Ро на оси Р определяет Р@). Поскольку через каждую такую точку
проходит точно одно решение, в этом случае мы видим, что начальное условие Р@) = Ро
определяет единственное решение, согласующееся с имеющимися данными.
1.1. Дифференциальные уравнения и математические модели » 25
С=12 С = 6 С=3
Рис. 1.1.3. Графики P(t) = Cekt при к = In 2
Математические модели
Наше краткое обсуждение прироста населения в примерах 5 и 6 иллюстрирует
критический процесс математического моделирования (рис. 1.1.4), который включает следующие
этапы.
1. Формулировка задачи реального мира в математических терминах; это и есть
построение математической модели.
2. Анализ или решение полученной математической задачи.
3. Интерпретация математических результатов в контексте первоначальной задачи
реального мира; например, получение ответа на ранее поставленный вопрос.
В примере с населением задача, возникающая в реальном мире, — это определение
численности населения в некоторый будущий момент времени. Математическая модель
состоит из списка переменных (Р и t), которые описывают данную ситуацию, а также
одного или нескольких уравнений, связывающих эти переменные (dP/dt = kP, Р@) =
= Р0), причем эти уравнения должны быть известны или принимаются как
выполняющиеся в рамках данной модели. Математический анализ состоит из решения этих уравнений
(в данном случае определяется Р как функция t). Наконец, мы применяем полученные ма-
1§1|||р1й?
-7 л:
МагемгЩй!
ИШШШШ^
Результаты;
Рис. 1.1.4. Процесс математического моделирования
26 . Глава 1. Дифференциальные уравнения первого порядка
тематические результаты, чтобы попытаться ответить на первоначально заданный вопрос
о реальном мире.
Однако весьма возможно, что ни одно решение дифференциального уравнения не
соответствует всей известной информации. В таком случае мы должны заподозрить, что
дифференциальное уравнение неточно описывает реальный мир. Например, решения
уравнения F) имеют вид P(t) = Cekt9 где С — положительная константа, но ни для
какого значения констант к и С функция P(t) не описывает точно фактический рост
населения во всем мире в течение нескольких прошлых столетий. Возможно, мы должны
поэтому написать более сложное дифференциальное уравнение, в котором принимается
во внимание влияние перенаселения на коэффициент рождаемости, нехватка продоволь-^
ствия и другие факторы. Это должно быть расценено не как отказ от модели, разобранной
в примере 5, а как понимание того, что нужно учесть влияние дополнительных
факторов при изучении роста численности населения. Действительно, уравнение F) является
весьма точным при некоторых обстоятельствах. Например, оно выполняется для роста
численности колонии бактерий при условиях неограниченного продовольствия и
пространства.
Но в нашем примере населения мы игнорировали эффекты таких факторов, как
изменение показателей рождения и смертности. Это сделало математический анализ весьма
простым, возможно, даже нереалистичным. Хорошая математическая модель
удовлетворяет двум противоречащим требованиям: чжа должна в достаточной степени учитывать
все существенные детали, чтобы представить ситуацию в реальном мире с
относительно небольшой погрешностью, и в то же время должна быть достаточно простой, чтобы
можно было осуществить математический анализ на практике. Если модель столь
детализирована, что она полностью представляет физическую ситуацию, то выполнить
математический анализ может быть слишком трудно. Если модель слишком проста, результаты
могут быть столь неточными, что будут бесполезны. Таким образом, есть неизбежный
компромисс между тем, что наблюдается в физической реальности и что является
математически возможным. Поэтому построение модели, которая правильно
преодолевает этот разрыв между реальностью и выполнимостью анализа — самый критический
и тонкий шаг в процессе построения модели. Необходимо найти способы упрощения
математической модели, которые позволят не жертвовать основными особенностями
процесса, происходящего в реальном мире. Математические модели рассматриваются в этой
книге повсюду. Остальная часть этого вводного раздела посвящена простым примерам
и стандартной терминологии, используемой при обсуждении дифференциальных
уравнений и их решений.
Примеры и терминология
Если С — константа и у(х) — 1/(С — ж), то
dy = 1
dx (С - хJ 1
если х ф С. Таким образом, функция
1.1. Дифференциальные уравнения и математические модели 27
является решением дифференциального уравнения
У2 (9)
dy 2
dx
на любом интервале вещественных чисел, не содержащем точку х — С.
Фактически, равенство (8) определяет однопараметрическое семейство
решений dy/dx = у2, — по одному решению для каждого значения
произвольной постоянной или "параметра" С. При С = 1 мы получаем
частное решение
У{Х) = -L;,
которое удовлетворяет начальному условию у@) = 1. Как видно из
рис. 1.1.5, это решение непрерывно на интервале (—оо, 1), но имеет
вертикальную асимптоту при х = 1. % ■
Пример 8
Проверим, что функция у(х) = 2а;1/2 — xxl2 In x удовлетворяет
дифференциальному уравнению
4жУ' + у = 0 A0)
для всех х > 0.
Решение Сначала мы вычисляем производные
у\х) = ~\х-^2\пх и у"(х) = \х-^2\пх-\х-^2.
Затем подстановка вычисленных производных в уравнение A0) дает
Ах2у" + у = 4х2 (\х~^2 Ых- |*-3/2) 4- 2х^2 - х1'2 In ж = 0
при условии, что х положительно, так что дифференциальное
уравнение удовлетворяется для всех х > 0. ■
То, что мы можем написать дифференциальное уравнение, еще не означает, что оно
имеет решение. Например, ясно, что дифференциальное уравнение
(у'J+у2 = -1 (И)
не имеет ни одного (действительного) решения, потому что сумма неотрицательных чисел
не может быть отрицательна. Точно так же очевидно, что уравнение
(у'J+У2 = 0 A2)
имеет только одно (действительное) решение у(х) = 0. В наших же предыдущих
примерах любое дифференциальное уравнение, имевшее по крайней мере одно решение,
в действительности имело бесконечно много решений.
28 Глава 1. Дифференциальные уравнения первого порядка
Порядок дифференциального уравнения — это порядок самой старшей производной,
которая входит в это уравнение. Дифференциальное уравнение примера 8 имеет второй
порядок, а уравнения в примерах 2-7 являются уравнениями первого порядка, ну а
уD) + х2у^ + хъу = sin х
— уравнение четвертого порядка. Самбе общее дифференциальное уравнение порядка п
с независимой переменной х и неизвестной функцией или зависимой переменной у =
= у(х) имеет вид
F(x,y,y',y",...,yW)=0, A3)
где F — известная вещественная функция от п + 2 переменных.
До сих пор мы использовали слово решение несколько неофициально. Чтобы быть
точным, мы скажем, что непрерывная функция и = и(х) является решением
дифференциального уравнения A3) на интервале /, если производные и', и",..., и^ существуют
на/и
F\x,u,u',u",...,uM) =0
для всех х из /. Ради краткости, мы будем говорить, что и — и(х) удовлетворяет
дифференциальному уравнению A3) на/.
Замечание. Из элементарного курса анализа известно, что дифференцируемая на
открытом интервале функция обязательно непрерывна на нем. Именно поэтому только
непрерывная функция может рассматриваться как (дифференцируемое) решение
дифференциального уравнения на интервале. ■
На рис. 1.1.5 показаны две "связанные" ветви графика у = 1/A —
— х). Левая ветвь — график (непрерывного) решения
дифференциального уравнения у' — у2, которое определено на интервале (—оо, 1).
Правая ветвь — график другого решения дифференциального
уравнения, которое определено (и непрерывно) на другом интервале A,оо).
Таким образом, в данйом случае одна и та же формула у(х) = 1/A — х)
i
\ (°'1)!
j ---"'
и
/>=1
1 ^.^
! /
i/
-5 0 5
х
Рис. 1.1.5. Решением уравнения у' = у2 является
функция у(х) = 1/A - х)
1.1. Дифференциальные уравнения и математические модели 29
Пример 9
фактически определяет два различных решения (с различными
областями определения) одного и того же дифференциального уравнения
у' = у2. ■
Если А и В — константы и
у(х) = A cos Зх + В sin Зх, A4)
то два последовательных дифференцирования приводят к равенствам
у\х) = -ЗА sin За; + 3J9cos3:r,
у"(х) = -9Acos3z - 9Bsin3x = -9у(х),
справедливым для всех х. Следовательно, равенство A4) определяет
то, что естественно назвать двупараметрическим (т. е. с двумя
параметрами) семейством решений дифференциального уравнения второго
порядка
у" + 9у = О
A5)
на всей оси вещественных чисел. На рис. 1.1.6 показаны графики
нескольких таких решений. ■
* о
\ л Л /
\щ
yiw
л/ \Д
v Ъ
II
W\M / XL
i\w\\
i MX ч
L
-3 0 3
x
Рис. 1.1.6. Это три решения у\(х) = 3cos3x, уъ(х) —
= 2sin3x и уз(х) = — 3cos3x -f 2sin3x
дифференциального уравнения у" + 9у = 0
Хотя дифференциальные уравнения A1) и A2) — исключения из общего правила, мы
увидим, что дифференциальное уравнение n-го порядка обычно имеет п-параметрическое
семейство решений, т.е. решение, которое.содержит п различных произвольных
постоянных, или параметров.
В обоих уравнениях A1)иA2)у/ определяется как неявно определенная функция, что
причиняет некоторые осложнения. По этой причине обычно мы будем предполагать, что
любое изучаемое дифференциальное уравнение может быть разрешено явно относительно
самой старшей входящей в него производной; это означает, что уравнение может быть
написано в так называемой нормальной форме
уМ = с(х,у,у',у",...,у^),
A6)
30 Глава 1. Дифференциальные уравнения первого порядка
где G — действительная функция от п + 1 переменной. Кроме того, мы всегда будем
искать только действительные решения, если не оговорено иное.
Все рассмотренные выше дифференциальные уравнения являются обыкновенными
дифференциальными уравнениями, т. е. уравнениями, в которых неизвестная функция
(зависимая переменная) зависит только от одной независимой переменной. Если зависимая
переменная будет функцией двух или большего числа независимых переменных, то,
вероятно, в уравнение будут входить и частные производные; если они входят, уравнение
называют дифференциальным уравнением в частных производных. Например,
температура и — и(х, t) длинного тонкого однородного стержня в точке х в момент времени t
удовлетворяет (при соответствующих упрощающих предположениях)
дифференциальному уравнению в частных производных
ди _ д2и
Tfc ft?'
где к — константа (называемая коэффициентом теплопроводности стержня). В главах 1-8
мы будем изучать только обыкновенные дифференциальные уравнения и будем называть
их просто дифференциальными уравнениями.
В этой главе мы сконцентрируемся на дифференциальных уравнениях первого порядка
вида
*-/(.„).
A7)
Мы также приведем обширный набор приложений таких уравнений. Типичная
прикладная математическая модель будет задачей Коши (задачей с начальными условиями),
она будет состоять из дифференциального уравнения A7) вместе с начальным условием
у(хо) = 2/0- Обратите внимание, что мы называем у(хо) = г/о начальным условием,
независимо от того, действительно ли хо = 0. Решить задачу Коши (задачу с начальными
условиями)
dx
/(ж, у), у{х0)=уо,
A8)
значит найти дифференцируемую функцию у — у{х), которая удовлетворяет обоим
условиям A8) на некотором интервале, содержащем xq. ,
Пример 10
Зная решение у(х) = 1/(С — х) дифференциального уравнения
dy/dx — г/2, рассмотренного в примере 7, решим задачу Коши (задачу
с начальными условиями)
\
dx
У
2/A) = 2.
Решение Мы должны только найти значение С такое, чтобы решение у(х) =
= 1/(С — х) удовлетворяло начальному условию уA) = 2. Подстановка
значений х = 1 иу — 2ь данное решение влечет
2 =f V(l)
c-v
1.1. Дифференциальные уравнениями математические модели 31
так что 2С — 2 = 1 и, следовательно, С = §. При этом значении С мы
получаем искомое решение
у(хУ=
-х Ъ-2х
На рис. 1.1.7 показаны две ветви графика у = 2/C — 2х). Левая ветвь —
график решения данной задачи Коши (задачи с начальными условиями)
У* = У2-> 2/A) = 2 на»(—оо,|). Правая ветвь проходит через точку
B, —2) и поэтому является графиком решения другой задачи Коши
(задачи с начальными условиями) у' = у2, уB) — — 2 на (§, оо). ■
>, о
1
/ ]jc = 3/2
1/B,-2)
1
-5 0 5
Рис. 1.1.7. Решения уравнения у' = у2, определяемые
формулой у(х) = 2/C — 2х)
Главный вопрос, который интересует нас сейчас, следующий: если дано
дифференциальное уравнение, которое имеет решение, удовлетворяющее данному начальному
условию, то как мы фактически можем найти или вычислить это решение? И, найдя его, что
мы можем сделать с ним? Мы увидим, что относительно небольшого количества простых
методов, таких как разделение переменных (раздел 1.4), методы решения линейных
уравнений (раздел 1.5) и элементарные замены переменных (раздел 1.6), вполне достаточно
для нахождения решений разнообразных уравнений первого порядка, имеющих весьма
важные приложения.
В задачах 1-12 с помощью замены проверьте, что каэюдая данная функция является решением
данного дифференциального уравнения. Всюду в этих задачах штрихи обозначают производные
по х.
1.
3.
5. у
7. У
8. у
у' + 2у = 0;у
у" = 9у; уг =
-2х
= 3е
Зх
е* ,2/2
-Зх
= Зх2; у = х3 + 7 2.
' + 4у = 0; 2/i = cos 2х, 2/2 = sin 2x 4.
= у + 2е~х; у = ех - е~х 6. #" + 4*/' + 4у = 0; уг = е~2х, у2 = хе~
' — 2у' + 2у = 0; 2/i = ex cos x, 2/2 = еж sin x
' + у = 3 cos 2x, 2/i = cos х — cos 2x, 2/2 = sin x — cos 2x
32 Глава 1. Дифференциальные уравнения первого порядка
9. у' + 2ху2 = 0;у= j±-^
10. х2у" + ху' — у — In x; 2/i = ж — In ж, 2/2 = In ж
х
11. ж2у" 4- 5жу' + 4у = 0; yi = —, 2/2 = —у
12. ж2у" — ху' -f 22/ = 0; 2/i = xcos(lna:), 2/2 = a?sin(lna?)
В задачах 13-16 подставьте у — егх в данное дифференциальное уравнение, чтобы определить
все значения константы г, для которых у = егх явЛяется решением уравнения.
13. Зу' = 22/ 14. 42/" = у
15. у" + у' - 2у = 0 16. 32/" + Зу' - 4у = 0
5 задачах 17-26 сначала проверьте, что у(х) удовлетворяет данному дифференциальному
уравнению. Затем определите значение константы С так, чтобы функция у (ж) удовлетворяла данному
начальному условию. Если хотите, используйте компьютер или графический калькулятор для
построения эскизов нескольких типичных рещений данного дифференциального уравнения, и
выделите то решение, которое удовлетворяет данному начальному условию.
17. у' + у = 0; у(ж) = Се"*, 2/@) = 2 18. у' = 2у; у(ж) = Се2*, 2/@) = 3
19. у' = у + 1; у(ж) = Се* - 1,2/@) = 5
20. у' = х-у; у(х) = Се~х + х - 1,2/@) = 10
21. 2/' + Зж2у = 0; у(х) = Се"*3,2/@) = 7 22. eV = 1; У 0*0 = 1п(ж + С), 2/@) = 0
23. ж£ + 32/ = 2ж5; у(ж) = \хъ + Сж~3,2/B) = 1
24. #2/' - Зу = х3; у(х) = х3(С + In ж), уA) = 17
25. у' = Зж2(у2 + 1); у(ж) = tg(*3 + С), у@) = 1
26. у' + у tgж = cos ж; у (а?) = (х + С) cos ж, уGг) = 0
5 задачах 27-31 функция у = д(х) описана некоторым геометрическим свойством ее графика.
Напишите дифференциальное уравнение в виде dy/dx = /(ж, у), имеющее функцию g в качестве
своего решения (или одного из своих решений).
27. Наклон графика функции g в точке (ж, у) равен сумме ж и у.
28. Касательная к графику функции g в точке (ж, у) пересекает ось ж в точке (ж/2,0).
29. Каждая нормаль к графику функции g проходит через точку @,1).
30. График функции g нормален к каждой кривой вида у = ж2 + к (к — константа) в точке
пересечения.
31. Касательная к графику функции g в (ж, у) проходит через точку (—у, ж).
В задачах 32-36 напишите — в манере уравнений (З)-(б) из этого раздела — дифференциальное
уравнение, которое является математической моделью описанного процесса.
32. Скорость изменения численности населения Р пропорциональна квадратному корню из Р.
33. Скорость изменения скорости v моторной лодки пропорциональна квадрату v.
34. Ускорение dv/dt автомобиля пропорционально разности между 250 км/час и скоростью
автомобиля.
35. В городе с постоянной численностью населения Р жителей скорость изменения числа N тех
людей, которые узнали некоторую новость, пропорциональна числу тех, кто еще не узнали эту
новость.
1.1. Дифференциальные уравнения и математические модели 33
36. В городе с постоянной численностью населения Р жителей скорость изменения числа N
жителей, инфицированных некоторой инфекционной болезнью, пропорциональна произведению
количества заболевших на количество тех, кто не заболел.
В задачах 37-42 проверкой найдите по крайней мере одно решение данного дифференциального
уравнения. Иными словами, используйте свое знание производных, чтобы угадать по крайней мере
одно решение данного дифференциального уравнения. Затем проверьте вашу догадку.
37. у" = О 38. у1 = у
39. ху' + у = Зх2 40. {у'J + у2 = 1
41. у' + у = ех 42. у" + у = 0
43. (а) Пусть к — константа. Показать, что общее решение дифференциального уравнения (с одним
параметром)
^ = кх2
dt
дает функция x(t) = 1/(С — kt), где С — произвольная постоянная.
(Ь) Найдите проверкой решение задачи Коши (задачи с начальными условиями) х' — кх2,
х@) = 0.
44. (а) Продолжение задачи 43. Предположите, что к положительно, а затем постройте графики
решений х' = кх2 для нескольких типичных положительных значений ж@).
(Ь) Чем бы отличались эти решения, если бы константа к была отрицательна?
45. Предположим, что численность популяции грызунов Р удовлетворяет дифференциальному
уравнению dP/dt = кР2. Первоначально есть Р@) = 2 грызуна, и их число
увеличивается со скоростью dP/dt = 1 грызун в месяц, когда популяция насчитывает Р = 10 грызунов.
Когда численность популяции будет равна ста грызунам? А тысяче? Что происходит в такой
популяции?
46. Предположим, что скорость v моторной лодки в воде удовлетворяет дифференциальному
уравнению dv/dt = kv2. Начальная скорость моторной лодки v@) = 10 метров в секунду (м/с), v
уменьшается со скоростью 1 м/с2, когда v = 5 м/с. Когда скорость лодки уменьшится до 1 м/с?
До jq м/с? Когда лодка остановится?
47. В примере 7 мы видели, что у(х) = 1/{С — х) определяет однопараметрическое семейство
решений дифференциального уравнения dy/dx = у2, (а) Определите значение С так, чтобы
2/A0) = 10. (Ь) Существует ли значение С такое, что у@) = 0? Но можете ли вы найти (угадать)
решение dy/dx = у2, такое что у@) = 0? (с) На рис. 1.1.8 показаны типичные графики решений
вида у(х) = 1/(С — х). Заполняют ли эти интегральные кривые всю плоскость xyl Можно
ли отсюда заключить, что для любой заданной точки (а, Ь) в плоскости дифференциальное
уравнение dy/dx = у2 имеет точно одно решение у (х), удовлетворяющее условию у (а) — Ы
48. (а) Покажите, что формула у(х) = Сх4 определяет однопараметрическое семейство
дифференцируемых решений дифференциального уравнения ху' = Ау (рис. 1.1.9). (Ь) Покажите, что
формула
(*) = {"
. ч . —ж4, если х < 0,
у(х) = <
если х > 0
определяет дифференцируемое решение уравнения ху' = 4у для всех х, но не имеет вида
у(х) = Сх4. (с) Выбрав любые два вещественных числа а и Ь, объясните, почему в отличие
от части (с) задачи 47 существует бесконечно много дифференцируемых решений уравнения
ху' — 4у, причем все они удовлетворяют условию у (а) — Ь.
34
Глава 1. Дифференциальные уравнения первого порядка
1С = 4
Рис, 1.1.8. Графики решений
уравнения dy/dx = у2
100
80
60
40
20
>s 0
-20
-40
-60
-80
— 100
-5-4-3-2-1 0 12 3 4 5
х
Рис. 1.1.9. Графики у = Сх4 для
различных значений С
1.2. Интегралы в качестве общих и частных
решений
Уравнение первого порядка dy/dx — f(x, у) принимает особенно простую форму, если
функция / не зависит от зависимой переменной у:
&у_
dx
= /(*)■
О)
В этом частном случае достаточно только проинтегрировать обе части уравнения A),
чтобы получить
2/0*0 = f(x)
dx + C.
B)
Это — общее решение уравнения A), что означает, что в него входит произвольная
постоянная С и для каждого значения С данная функция является решением
дифференциального уравнения A). Если G{x) действительно является примитивной (первоообразной,
неопределенным интегралом) функции /, т. е. если Gf(x) = f(x), то
y(x) = G(x) + C.
C)
Графики любых двух таких решений yi(x) = G(x) + С\ и у%(х) = G(x) + C2 на том
же самом интервале / "параллельны"; суть этого хорошо видна из рис. 1.2.1 и 1.2.2. Там
мы видим, что константа С геометрически интерпретируется как расстояние по вертикали
между двумя кривыми у(х) — G(x) и у(х) = G(x) + С.
Чтобы удовлетворить начальному условию у(хо) = Уо> нужно только подставить х =
= xq и у = 2/о в уравнение C), чтобы получить уо — G(xo) 4- С, так что С = уо — G(xo).
При этом значений С мы получаем частное решение уравнения A), удовлетворяющее
задаче Коши (задаче с начальными условиями)
d/y_
dx
f(x), y(x0) = у0.
1.2. Интегралы в качестве общих и частных решений 35
Рис. 1.2.1. Графики у = \х2 4- С
для различных значений С
Рис. 1.2.2. Графики у = sinx + С
для различных значений С
Мы увидим, что это — типичный способ решения дифференциальных уравнений
первого порядка. Обычно мы сначала находим общее решение, содержащее произвольную
постоянную С. Затем мы пытаемся соответствующим выбором значения С получить
частное решение, удовлетворяющее данному начальному условию у(хо) = уо.
Замечание. В предыдущем абзаце термин общее решение дифференциального
уравнения первого порядка означает просто однопараметрическое семейство решений.
Естественный вопрос: можно ли из данного общего решения получить каждое частное
решение дифференциального уравнения, выбрав подходящее значение параметра? Когда это
действительно так, мы называем его общим решением дифференциального уравнения.
Например, поскольку любые две примитивные (первоообразные) той же самой функции
f(x) могут отличаться только на константу, каждое решение уравнения A) имеет вид B).
Таким образом, равенство B) определяет общее решение уравнения A). ■
Пример 1
Решим задачу Коши (задачу с начальными условиями)
dy
dx
= 2х + 3, уA) = 2.
Решение Интегрирование обеих частей дифференциального уравнения B)
немедленно дает общее решение
у(х) = \Bх + 3) dx = х2 + Зх + С.
На рис. 1.2.3 показаны графики функций у = х2 + Зх 4- С для
различных значений С. Искомое частное решение изображается кривой,
которая проходит через точку A,2), потому что оно удовлетворяет
начальному условию
y(l) = (lf + 3-(l) + C = 2.
36
Глава 1. Дифференциальные уравнения первого порядка
Рис. 1.2.3. Интегральные кривые дифференциального
уравнения из примера 1
Из этого следует, что С = — 2, так что искомое частное решение
представляет собой функцию
у(х) = х2 + Зх - 2. ■
Уравнения второго порядка. Если можно найти примитивную функции /, то легко
найти решение уравнения первого порядка вида dy/dx = f(x). Аналогичное утверждение
справедливо и для дифференциальных уравнений второго порядка специального вида
dx2
= <?(*),
D)
в которых функция g в правой части не содержит ни зависимой переменной у, ни ее
производной dy/dx. Мы просто интегрируем один раз, чтобы получить
dx
= у"(х) dx = g{x) dx = G(x) + Cu
где G — примитивная функции g, a C\ — произвольная постоянная. Затем второе
интегрирование дает
у(х) = у\х) dx = I [G{x) + Ci] dx = | G{x) dx + Cxx + C2,
где Сг — вторая произвольная постоянная. Так что дифференциальное уравнение второго
порядка D) можно решить последовательным решением уравнений первого порядка
dv / \ dy^
-=9(х) и £=«(*).
Скорость и ускорение
С помощью непосредственного интегрирования можно решить множество важных задач
о движении частицы (или точки, имеющей определенную массу), если известны силы,
1.2. Интегралы в качестве общих и частных решений 37
действующие на частицу. Движение частицы по прямой линии (ось х) описывается ее
положением
х = /(*), E)
т. е. функцией, дающей ее координату х в момент времени t. Скорость частицы
определяется равенством
► «(«) = /'(<); т.е. v = ^. F)
Ускорение тела a(t) равно a(t) = v'(t) = x"(i) или, в обозначениях Лейбница,
dv d2x
> а = й = ^> G)
Второй закон Ньютона (закон движения тела под воздействием силы) гласит, что если
сила F(t), действующая на частицу, направлена вдоль ее линии движения, то
ma(t) = F(t); т. е. F = та, (8)
где т — масса частицы. Если сила F известна, то уравнение x"(t) = F(t)/m можно
проинтегрировать дважды, этим будет найдена функция, дающая положение x(t). Эта
функция будет содержать две константы, появляющиеся после интегрирования. Эти две
произвольные постоянные часто определяются по начальному положению хо = х@)
и начальной скорости vq — v@) частицы.
Постоянное ускорение. Предположим теперь, что сила F, а потому и ускорение а =
= F/m, являются постоянными. Тогда мы начинаем с уравнения v
dv , '
—- = а (а — константа) (9)
dt
и интегрируем обе части, чтобы получить
v(t) = \adt = at + C1.
Мы знаем, что v — г>о, когда t = 0, и подстановка этой информации в предыдущее
уравнение дает С\ = v$. Так что
dx
v(t) = — =at + v0. A0)
at
Второе интегрирование дает
x(t) = v(t) dt = Uat + vo) dt = \at2 + v0t + C2,
и подстановка t = 0, x = xq дают C2 = xq. Поэтому
x(t) = \at2 + v0t + x0. A1)
Таким образом, используя уравнение A0), мы можем найти скорость, а с помощью
уравнения A1) положение частицы в любой момент времени t9 если известно ее
постоянное ускорение а, ее начальная скорость vq и ее начальное положение xq.
38 Глава 1. Дифференциальные уравнения первого порядка
Лунный посадочный модуль падает свободно на поверхность Луны со
скоростью 450 метров в секунду (м/с). Его тормозные реактивные
двигатели обеспечивают постоянное замедление (торможение) 2,5 метров
в секунду за секунду (м/с2) (гравитационное ускорение, обусловленное
Луной, учтено в данном замедлении). На какой высоте над
поверхностью Луны должны быть включены тормозные реактивные двигатели,
чтобы гарантировать "мягкое приземление" (v = 0 при посадке)?
Решение Через x(t) мы обозначаем высоту лунного посадочного модуля над
поверхностью Луны (см. обозначения на рис. 1.2.4). Пусть тормозные
реактивные двигатели должны быть запущены над поверхностью Луны
в момент времени t = 0. Тогда vo = —450 (м/с, скорость
отрицательна, потому что высота x(t) уменьшается), и а = +2,5, потому что *
тяга вверх увеличивает скорость v (хотя она уменьшает модуль
скорости \v\). Тогда уравнения A0) и A1) принимают вид
v(t) = 2,5£ - 450 A2)
и
x(t) = l,25t2 - 450* + х0, A3)
где хо — высота посадочного модуля над поверхностью Луны в момент
времени t = 0, когда должны быть включены тормозные реактивные
двигатели.
Из уравнения A2) мы видим, что v = 0 (мягкое приземление)
происходит, когда t — 450/2,5 = 180 с (т. е. 3 минуты); тогда подстановка
t — 180, х = 0 в уравнение A3) дает
Хо = о - A,25)A80J + 450A80) = 40,500 метров,
т.е. хо = 40,5 км « 25^ миль. Таким образом, тормозные
реактивные двигатели должны быть включены, когда лунный посадочный
модуль находится на 40,5 км выше поверхности Луны, в этом случае он
приземлится мягко на лунной поверхности после 3 минут замедления
спуска. ■
Пример 2
Рис. 1.2.4. Лунный посадочный модуль из примера 2
1.2. Интегралы в качестве общих и частных решений 39
Физические единицы
Чтобы проводить вычисления, необходимо физичеаще величины, такие как расстояние
и время, измерить в определенных единицах. Иногда мы используем специальные
единицы, измеряя, например, расстояние в милях или километрах, а время в часах — в
специальных ситуациях (например, в задачах о движении автомобиля). Однако система единиц
fps, включающая футы, фунты и секунды, а также система единиц МКС1, включающая
секунды, килограммы и метры, используется чаще в научных и технических задачах.
Фактически система единиц fps обычно используются только в Соединенных Штатах
Америки (и нескольких других странах), а система единиц МКС представляет собой
стандартную международную систему научных единиц.
щщт^ш
'■■У-J'У'-'"'*;
'?',!>, Единицы МКС
"i-'Ль ^- '•*''"■ -'-■ *■='-*-' '-■'■ ■■'■Ь '■■■■" ■&
Сила
Масса
Расстояние
Время
9
фунт (фунт)
единица массы в системе фунт-сила
фут
секунда (с)
32 фт/с2
ньютон (Н)
килограмм (кг)
метр (м)
секунда (с)
9,8 м/с2
Последняя строка этой таблицы дает значения для гравитационного ускорения д на
поверхности Земли. Хотя точность этих приближенных значений достаточна для
большинства примеров и задач, иногда нужны более точные значения — 9,7805 м/с2 и 32,088 фт/с2
(на уровне моря на экваторе).
Обе системы согласованы со вторым законом Ньютона F — та. Таким образом,
по определению 1 Н — это сила, требуемая для того, чтобы придать ускорение 1 м/с2
массе 1 кг. Точно так же по определению 1 единица массы в системе фунт-сила — это
масса, которая испытывает ускорение 1 фт/с2 под воздействием силы 1 фунт. (Мы будем
использовать единицы МКС во всех задачах, где требухртся единицы массы, и, таким
образом, будем редко нуждаться в единице массы в системе фунт-сила для измерения
массы.)
Дюймы и сантиметры (так же как мили и километры) также обычно используются для
измерения расстояний. Для преобразований между единицами fps и МКС нужно помнить,
что
1 дюйм = 2,54 см (точно) и 1 фунт « 4,448 Н.
Например,
см
1 фут =12 дюймов х 2,54—— = 30,48 см,
дюйм
из 3toro следует, что
см
1 миля = 5280 футов х 30,48— = 160934,4 см « 1,609 км.
фт
Таким образом, американское ограничение скорости 50 миль/час означает, что в
международных единицах ограничение скорости приблизительно равно 50 х 1,609^80,45 км/час.
1 Интернациональное обозначение для этой системы MKS, авторы ее обозначают просто mks. — Примеч. ред.
40 Глава 1. Дифференциальные уравнения первого порядка
Вертикальное движение с гравитационным ускорением
Вес тела W — сила, обусловленная тяготением. Замена a = gnF = W во втором законе
Ньютона F = та дает уравнение
W = тд
A4)
для веса W тела массой га на поверхности земли (где д « 32 фт/с2 « 9,8 м/с2). Например,
масса га = 20 кг имеет вес W = B0 кг)(9,8 м/с2) = 196 Н. Точно так же тело массой га,
весящее 100 фунтов, в системе МКС имеет вес
W = A00 фунтов)D,448 Н/фунт) = 444,8 Н,
так что его масса
W 444,8 Н
га = — =
i 45,4 кг.
9 9,8 м/с2
Чтобы изучать вертикальное движение, естественно выбрать ось у в качестве системы
координат для положения тела, причем часто у = 0 соответствует уровню на поверхности
Земли. Если положительное направление совпадает с направлением вверх, то тяжесть
уменьшает высоту вертикально двигающегося тела, а также уменьшает его скорость v =
= dy/dt. Следовательно, если мы пренебрегаем сопротивлением воздуха, то ускорение
а — dv/dt тела дает формула
dv
~аЧ
= -9-
A5)
Это уравнение ускорения является отправной точкой во многих задачах, в которых
рассматривается вертикальное движение. Последовательные интегрирования (как в
уравнениях A0) и A1)) дают формулы для скорости и высоты
v(t)
y(t)
-gt + v0
■\gt2 + v0t + yo-
A6)
A7)
Здесь г/о обозначает начальную высоту тела (в момент времени t = 0), а г>о — его
начальную скорость.
Пример 3
(а) Предположим, что шар брошен прямо вверх с поверхности земли
(Уо = 0) с начальной скоростью vo = 96 (фт/с, так что мы используем
единицы fps, в которых д = 32 фт/с2). Он тогда достигнет своей
максимальной высоты, когда его скорость (уравнение A6)) будет нулевой,
v(t) = -32£ + 96 = 0,
т. е. когда t = 3 с. Следовательно, максимальная высота, которой
достигает шар, равна
уC) = -| • 32 • З2 + 96 • 3 + 0 = 144 (фута)
(получена с помощью уравнения A7)).
1.2. Интегралы в качестве общих и частных решений 41
(Ь) Если стрела выпущена прямо вверх с поверхности земли с
начальной скоростью vo = 49 (м/с, теперь мы используем д = 9,8 м/с2
в системе МКС), то она упадет на землю, когда
y{t) = -\ • (9,8)*2 + 49* = D,9)t(-t + 10)
т. е. после 10 с полета в воздухе.
0,
Задача пловца
На рис. 1.2.5 показана плавно текущая на север река шириной w = 2а. Линии х = ±а
представляют собой берега реки, а ось у проходит через середину реки. Предположим,
что скорость воды vr увеличивается по мере приближения к центру реки, и зависимость
от расстояния х до центра определяется формулой
vr = v0
К)
A8)
Уравнение A8) позволяет проверить, что вода действительно течет быстрее всего в центре,
где vr = vo, и что vr = 0 на каждом берегу реки.
Рис. 1.2.5. Задача пловца (пример 4)
Предположим, что пловец начинает плыть из точки (—а, 0) на западном берегу и
плывет на восток с постоянной скоростью vs относительно воды. Как показано на рис. 1.2.5,
вектор его скорости (относительно земли) имеет горизонтальную компоненту vs и
вертикальную составляющую vr. Следовательно, угол а направления движения пловца дается
уравнением
vr
tga=—. j
vs
Поскольку tga = dy/dx, замена A8) дает дифференциальное уравнение
ах vs \ сь J
для траектории пловца у = у(х) при пересечении реки.
A9)
Пример 4
Предположим, что река имеет ширину 1 милю и что скорость воды
в середине реки равна г>о = 9 миль/час. Если скорость пловца равна
vs = 3 миль/час, то уравнение A9) принимает вид
I-*-*")-
42 Глава 1. Дифференциальные уравнения первого порядка
Интегрирование дает
у(х) = | C - 12х2) dx = Зх - Ах3 + С
для траектории пловца. Начальное условие у (— \) = О дает С = 1, так
что
2/(ж) = Зж - 4х3 + 1.
Тогда
2/Ш=3A)-4AK + 1 = 2,
так что пловец дрейфует 2 мили вниз по течению, в то время как он
проплывает 1 милю поперек реки. '
■
1.2. Задачи \ ___
В задачах 1-10 найдите функцию у — /(ж), удовлетворяющую данному дифференциальному
уравнению и заданному начальному условию.
L|-2x + l;»@) = 3 У"'Х 2.|-(«-2)»;»(i) = l
4-Vft.W-o 4*-£
7-£ = ^Т1:^ = 0 8.|=со82*;г,@) = 1
9-^ = 7гЬ^@) = ° 10.| = ,е-;,@) = 1
5 задачах 11-18 найдите функцию, дающую положение x(t) частицы, двигающейся с данным
ускорением a(t) из начального положения хо = х@) с начальной скоростью vo = v@).
11. a(t) = 50, vo = 10, хо = 20 12. a(t) = -20, v0 = -15, x0 = 5
13. a(t) = 3t, vo = 5, xo = 0 14. a(t) = 2t + 1, v0 = -7, x0 = 4
15. a(t) = 4(t -f 3J, vo = —1, xo = 1 16. a(t) = , , , vo = —1, жо = 1
17. a(t) = , vo = 0, xo = 0 18. a(t) = 50sin5t, v0 = -10, x0 = 8
(t + 1)
J? задачах 19-22 частица начинает двигаться из начала координат и перемещается по оси х со
скоростью, заданной функцией v(t), чей график приведен на рис. 1.2.6-1.2.9. Начертите график
функции, выражающей положение x(t) для 0 ^ t ^ 10.
1.2. Интегралы в качестве общих и частных решений 43
19. Ю
8
6
4
2\-
0
E,5)
20.
2 4 6
t
8 10
Рис. 1.2.6. График функции,
выражающей скорость v(t), для
задачи 19
Рис. 1.2.7. График функции,
выражающей скорость v(t)9 для
задачи 20
21. ю
22.
Рис. 1.2.8. График функции,
выражающей скорость v(t), для
задачи 21
Рис. 1.2.9. График функции,
выражающей скорость v(t)9 для
задачи 22
23. Найдите максимальную высоту, достигаемую стрелой из части (Ь) примера 3.
24. Шар падает с крыши здания высотой 400 футов. Через какое время он достигнет земли? С какой
скоростью шар упадет на землю?
25. Автомобиль начинает тормозить, когда он двигается со скоростью 100 км/час. Тормоз
обеспечивает постоянное замедление 10 метров в секунду за секунду (м/с2). Какое расстояние
проедет автомобиль до остановки?
26. Снаряд запущен прямо вверх с начальной скоростью 100 м/с с крыши здания высотой 20 м и
падает на землю в основании здания. Найдите (а) его максимальную высоту относительно земли;
(Ь) момент времени, когда он пролетает мимо крыши здания; (с) его полное время полета в
воздухе.
27. Шар брошен прямо вниз с вершины высокого здания. Начальная скорость шара равна 10 м/с.
При падении на землю его скорость равна 60 м/с. Какова высота здания?
28. Бейсбольный мяч брошен прямо вниз с начальной скоростью 40 фт/с с вершины памятника
Вашингтону (высота 555 футов). Через какое время он достигнет земли и какая скорость будет
у бейсбольного мяча, когда он ударится о землю?
44 Глава 1. Дифференциальные уравнения первого порядка
29. Дизельный автомобиль постепенно ускоряется так, что в течение первых 10 с его ускорение
дается формулой
^ = @,12)*2 + @,6)* (фт/с2).
Предположим, автомобиль начинает движение из состояния покоя (хо = 0, vo = 0). Найдите
расстояние, на которое он переместится через 10 с, и его скорость в этот момент.
30. Автомобиль, перемещающийся со скоростью 60 миль/час (88 фт/е) проехал 176 футов после
того, как были внезапно включены его тормоза. Предполагая, что система торможения
обеспечивает постоянное замедление, найдите его ускорение при замедлении? Сколько времени
автомобиль двигался после включения тормозов?
31. Тормозные полосы указали, что автомобиль тормозил на дистанции длиной 75 м до полного
останова. Данный автомобиль замедлялся с постоянным ускорением 20 м/с2. Как быстро ехал
автомобиль перед торможением? Выразите его скорость в единицах скорости км/час.
32. Предположим, что автомобиль проезжает 15 м, если он двигается со скоростью 50 км/час
во время начала торможения. Предполагая, что автомобиль имеет то же самое постоянное
замедление, как далеко он будет буксовать, если двигается в со скоростью 100 км/час во время
начала торможения?
33. На некоторой планете шар, брошенный с высоты 20 футов, упадет на поверхность планеты
через 2 с. Сколько времени на этой планете будет падать шар с вершины здания высотой
200 футов? Какова будет скорость при ударе о грунт?
34. Человек может забросить шар прямо вверх с поверхности земли на максимальную высоту
144 фута. Как высоко этот человек мог бы забросить шар на планете из задачи 33?
35. Камень падает из состояния покоя с начальной высоты h над поверхностью земли. Покажите,
что в момент соударения с землей скорость шара будет равна v = y/2gh.
36. Предположим, женщина может подскочить вертикально вверх на высоту 2,25 фута над землей.
Как высоко она может подскочить на Луне, на поверхности которой гравитационное ускорение
приблизительно равно 5,3 фт/с2?
37. В полдень автомобиль стартует /из состояния покоя в пункте А и движется с постоянным
ускорением по прямой дороге к пункту В. Автомобиль достигает В в 12:50 после обеда, имея
при этом скорость 60 миль в час. Чему равно расстояние от А до В!
38. В полдень автомобиль стартует из состояния покоя в пункте А и движется с постоянным
ускорением по прямой дороге к пункту С, находящейся на расстоянии 35 миль от А. Когда
автомобиль достигает С, его скорость равна 60 миль в час. Когда автомобиль прибыл в С?
39. Предположим, что в условиях примера 4 а = 0,5 мили и vo = 9 миль в час. Какой должна быть
скорость пловца, чтобы он дрейфовал только 1 милю вниз по течению, когда он переплывает
реку?
40. Предположим, что в условиях примера Л а = 0,5 мили и vo = 9 миль в час, но скорость
воды в реке дает не квадратичная функция в уравнении A8), а функция, содержащая четвертую
степень
Найдите, на какое расстояние вниз по течению река отнесет пловца, когда он переплывет ее.
41. Бомба сбрасывается из вертолета, зависшего на высоте на 800 футов над поверхностью земли.
С поверхности земли, непосредственно под вертолетом, выстреливается снаряд прямо вверх
по бомбе, точно через 2 секунды после того, как была сброшена бомба. С какой начальной
скоростью нужно выстрелить снаряд, чтобы он уничтожил бомбу на высоте 400 футов?
42. Космический корабль свободно падает на поверхность Луны со скоростью 1000 миль в час. Его
тормозные реактивные двигатели обеспечивают постоянное замедление 20000 миль/час2. На
какой высоте над лунной поверхностью астронавты должны запустить тормозные реактивные
1.3. Поля направлений и интегральные кривые 45
двигатели, чтобы обеспечить мягкое приземление? (Как и в примере 2, гравитационным полем
Луны можно пренебречь.)
43. Артур Кларк в рассказе Солнечный ветер (Wind from the Sun, 1963) описывает космический
корабль "Диана", движимый солнечным ветром. Его алюминиевый парус обеспечивает ему
постоянное ускорение 0,001<7 = 0,0098 м/с2. Предположим, что этот космический корабль
стартует из состояния покоя в момент времени t — 0 и одновременно запускает снаряд прямо
вперед в том же самом направлении, который движется со скоростью одной десятой скорости
света с = Зх 108 м/с. Через какое время космический корабль догонит снаряд и какое расстояние
он преодолеет за это время?
44. Шофер, попавший в несчастный случай, утверждает, что он ехал со скоростью только 25 миль
в час. Когда полиция проверила его автомобиль, оказалось, что при скорости 25 миль в час
тормозной путь автомобиля равен 45 футам. Но длина следов при торможении была равна
210 футам. Считая замедление тем же самым (и постоянным) в обоих случаях, определите
скорость, с которой на самом деле двигался автомобиль до несчастного случая.
1.3. Поля направлений и интегральные кривые
Рассмотрим дифференциальное уравнение вида
> § = /(х'2/) A)
где справа функция /(#, у) содержит и независимую переменную х, и зависимую
переменную у. Мы могли бы попытаться проинтегрировать обе части уравнения A) по я,
и, следовательно, написать у(х) = J /(#, у(х)) dx + С. Однако этот подход не приводит
к решению дифференциального уравнения, потому что подынтегральное выражение
содержит неизвестную функцию у (х) и поэтому интеграл не может быть выражен в явной
форме. На самом деле не существует никакой прямолинейной процедуры явного решения
общего дифференциального уравнения. Действительно, решения такого просто
выглядящего дифференциального уравнения как у' = х2 + у2 нельзя выразить в элементарных
функциях, изучаемых в учебниках анализа. Однако графические и численные методы
этого и последующих разделов позволяют найти приближенные решения дифференциальных
уравнений, которые удовлетворяют многим практическим целям.
Поля направлений и графическое решение
Есть простой геометрический способ находить решения данного дифференциального
уравнения у' = /(х, у). В каждой точке (#, у) плоскости ху значение f(x,y) определяет
наклон т = f(x,y). Решение дифференциального уравнения — это просто
дифференцируемая функция, график которой у ~у{х) имеет этот "правильный наклон" в каждой точке
(х,у(х))9 через которую он проходит, т.е. у'(х) = f(x,y(x)). Таким образом,
интегральная кривая дифференциального уравнения у' = /(#, у) — график решения уравнения —
будет просто кривой в плоскости ху, причем касательная к этой кривой в каждой точке
(ж, у) имеет наклон т = f(x,y). Например, на рис. 1.3.1 показайа интегральная кривая
дифференциального уравнения у1 — х — у вместе с ее касательными в трех характерных
точках.
Эта геометрическая точка зрения предлагает графический метод построения
приближенных решений дифференциального уравнения у' = f(x,y). Через каждую точку
46 Глава 1. Дифференциальные уравнения первого порядка
Рис. 1.3.1. Интегральная кривая дифференциального
уравнения у1 = х — у вместе с касательными,
имеющими наклон
• mi = xi - 2/i в точке (xbt/i);
• т2 = х2 - 2/2 в точке (#2,2/2);
• тз = хз - 2/з в точке (x3l 2/з)
некоторого представительного множества точек (х, у) в плоскости мы проводим
короткий отрезок, имеющий надлежащий наклон га = f(x,y). Все эти отрезки представляют
поле направлений (или поле наклонов) уравнения у' = f(x, у).
Пример 1
На рисунках 1.3.2, a-d показаны поля направлений и интегральные
кривые дифференциального уравнения
£-*
B)
для значений параметра к = 2, 0,5, —1 и —3 в уравнении B). Обратите
внимание, что каждое поле направлений наглядно представляет важную
информацию о качественном поведении всех решений
дифференциального уравнения. Например, на рис. 1.3.2,а и 1.3.2,Ь видно, что каждое
решение у(х) стремится к ±оо при х —► +оо если к > 0, а из рис. 1.3.2,с
и 1.3.2,d видно, что у(х) —> 0 при х —► +оо, если к < 0. Кроме того,
хотя знак к определяет направление увеличения или уменьшения у(х),
его абсолютное значение \к\ определяет скорость изменения у(х). Все
это наглядно демонстрируется графиками полей направлений,
подобным тем, что приведены на рис. 1.3.2. Все это легко увидеть, даже не
зная, что общее решение уравнения B) имеет явный вид у (х) = СекхМ
Поле направлений позволяет наглядно представить общие формы интегральных
кривых дифференциального уравнения. Через каждую точку интегральная кривая должна
пройти в таком направлении, что его касательная будет почти параллельной близлежащим
отрезкам поля направлений. Начав с любой начальной точки (а, Ь), мы можем попытаться
от руки приблизительно начертить эскиз интегральной кривой, которая как бы проклады-
1.3. Поля направлений и интегральные кривые 47
Рис. 1.3.2, а. Поле
направлений и интегральные кривые
уравнения у' — 2у
Рис. 1.3.2, Ь. Поле
направлений и интегральные кривые
уравнения у
@,5)у
Рис. 1.3.2, с. Поле
направлений и интегральные кривые
уравнения у' = —у
^ о
-1 К
Рис. 1.3.2, d. Поле
направлений и интегральные кривые
уравнения у1 = —Зу
вает свои путь вдоль поля направлении, следуя направлениям, указанным отрезками поля
направлений.
Пример 2
Нарисуем поле направлений для дифференциального уравнения у' =
= х — у и используем его для того, чтобы сделать приблизительный
набросок интегральной кривой, которая проходит через точку (—4,4).
Решение На рис. 1.3.3 приведена таблица наклонов для данного уравнения.
Числовое значение наклона т = х — у указано на пересечении
горизонтальной строки х и вертикального столбца у таблицы.
Просмотрев таблицу от левого верхнего угла по диагонали к нижнему
правому углу, легко убедиться, что эту таблицу можно было создать легко
и быстро. (Конечно, более сложная функция /(ж, у) в правой части
дифференциального уравнения требовала бы более сложных
вычислений.) На рис. 1.3.4 показано соответствующее поле направлений, а на
рис. 1.3.5 вычерчена (приблизительно) интегральная кривая, проходя-
48 Глава 1. Дифференциальные уравнения первого порядка
щая через точку (—4,4) так, чтобы следовать линиям поля направлений.
В каждой точке она идет в направлении, указанном отрезками поля
направлений. ■
Хотя программа (для электронной таблицы, например) с готовностью вычисляет
таблицу наклонов, приведенную на рис. 1.3.3, вручную весьма утомительно начертить
достаточное количество отрезков, например, такое, как на рис. 1.3.4. Однако большинство
систем компьютерной алгебры имеет команды для быстрого и аккуратного построения
полей направлений с нужным количеством отрезков; такие команды проиллюстрированы
в прикладном материале этого раздела. Чем больше сегментов линии вычерчено, тем
более точно можно начертить набросок интегральных кривых. На рис. 1.3.6 показано "более
точное" поле направлений для дифференциального уравнения у' = х — у из примера 2,
вместе с типичными интегральными кривыми, "шагающими" через это поле направлений.
Если внимательно рассмотреть рис. 1.3.6, можно заметить, что одна интегральная
кривая похожа на прямую линию! Действительно, легко проверить, что линейная функция
у = х — 1 является решением уравнения у' — х — у\ кажется вероятным, что другие
х\У
-4
-3
-2
-1
0
1
2
3
4
-4
0
1
2
3
4
5
6
7
8
-3
-1
0
1
2
3
4
5
6
7
-2
-2
-1
0
1
2
3
4
5
6
-1
-3
-2
-1
0
1
2
3
4
5
0
-4
-3
-2
-1
0
1
2
3
4
1
-5
-4
-3
-2
-1
0
1
2
3
2
-6
-5
-4
-3
-2
-1
0
1
2
3
-7
-6
-5
-4
-3
-2
-1
0
1
4
-8
-7
-6
-5
-4
-3
-2
-1
0
Рис. 1.3.3. Значения наклона у' — х — у для — 4 f£ x, у й 4
^ о
\ \ \ \
\ \ \ \ '
\ \ \ \ '
\ \ \ \ ^
V \ \ ч
\ \ \ N
\ \ \ - ,
\ \ - / ,
\ - / / ,
- / / /
\ \ \ -
\ \ - /
, \ - / /
ч — / / /
'//II
'/III
fill
/ / / 1
Рис. 1.3.4. Поле направлений
уравнения у' = х — у,
соответствующее таблице наклонов на
рис. 1.3.3
Рис. 1.3.5. Интегральная
кривая, проходящая через точку
(-4,4)
1.3. Поля направлений и интегральные кривые 49
интегральные кривые приближаются к этой прямой линии как к асимптоте при х —► +оо.
Этот вывод иллюстрирует то факт, что, глядя на поле направлений, можно узнать важную
информацию о решениях, которая нисколько не очевидна непосредственно из
дифференциального уравнения. Можете ли вы, глядя на соответствующую интегральную кривую на
этом рисунке, вывести, что уC)« 2 для решения у(х) задачи Коши (задачи с начальными
условиями) у' = х — у, у(—4) = 4?
^-3-2-101234
Рис. 1.3.6. Поле направлений и типичные
интегральные кривые уравнения у' = х — у .
Приложения полей направлений
Следующие два примера иллюстрируют использование полей направлений для того,
чтобы собрать полезную информацию о физических явлениях, моделями которых служат
дифференциальные уравнения. Пример 3 базируется на том факте, что бейсбольный мяч,
летящий в воздухе с умеренной скоростью v (менее чем приблизительно 300 фт/с)
испытывает сопротивление воздуха, которое приблизительно пропорционально v. Если
бейсбольный мяч брошен прямо вниз с вершины высокого здания или с зависшего вертолета,
то он испытывает и гравитационное ускорение (направленное вниз), и ускорение,
обусловленное сопротивлением воздуха (направленное вверх). Если ось у направлена вниз,
то скорость шара v = dy/dt и его гравитационное ускорение д = 32 фт/с2
положительны, в то время как ускорение из-за сопротивления воздуха отрицательно. Следовательно,
полное ускорение равно
dv
~di
= д — kv.
C)
Типичное значение константы пропорциональности сопротивления воздуха обычно
близко к к = 0,16.
Пример 3
Предположим, что вы бросаете бейсбольный мяч прямо вниз с
вертолета, зависшего на высоте 3000 футов. Может ли кто-нибудь, стоя на
земле, поймать его? Чтобы вычислить скорость, с которой шар
приземлится, можно использовать систему компьютерной алгебры,
имеющуюся в вашем ноутбуке для вычерчивания поля направлений дифферен-
50 Глава 1. Дифференциальные уравнения первого порядка
циального уравнения
dv
= 32 - 0,16г;.
D)
Результат показан на рис. 1.3.7 вместе с множеством интегральных
кривых, соответствующих различным значениям начальной скорости
г>@), с которыми вы могли бросить бейсбольный мяч вниз.
Рис. 1.3.7. Поле направлений и типичные
интегральные кривые уравнения v' = 32 — 0,16?;
Обратите внимание, что все эти интегральные кривые, кажется,
асимптотически приближаются к горизонтальной прямой v = 200. Это
значит, однако, что скорость брошенного бейсбольного мяча должна
приблизиться к граничному значению скорости v = 200 фт/с, а не
возрастать неограниченно (как это было бы в отсутствие сопротивления
воздуха). Поскольку 60 миль в час = 88 фт/с, то
~™ футов 60 миль/час
v = 200— х 00 , ,
с 88 фт/с
136,36
миль
час
Возможно, ловец, привыкший к скорости 100 миль в час, имел бы
некоторый шанс поймать такой быстрый шарик. ■
Комментарий. Если начальная скорость шара равна г>@) = 200, то уравнение D)
дает г/@) = 32 — @,1б)B00) = 0, так что шар не испытывает никакого начального
ускорения. Поэтому его скорость остается неизменной и, следовательно, v(t) = 200 —
постоянное "устойчивое решение" дифференциального уравнения. Если начальная
скорость больше, чем 200, то начальное ускорение, данное уравнением D), отрицательно,
так что шар замедляется, когда он падает. Но если начальная скорость меньше, чем 200,
то начальное ускорение, данное уравнением D), положительно, так что шар ускоряется
во время падения. Поэтому кажется весьма разумным, что из-за сопротивления воздуха
скорость бейсбольного мяча приблизится к граничной скорости 200 фт/с независимо от
начальной скорости, с которой был брошен шар. Вы можете проверить, что в отсутствие
сопротивления воздуха этот шар ударится о землю со скоростью большей 300 миль в час Л
В разделе 2.1 мы подробно обсудим логистическое дифференциальное уравнение
^ = *Р(М-Р), E)
1.3. Поля направлений и интегральные кривые 51
которое часто используется для моделирования численности P(t) популяции,
населяющей среду обитания с потенциальной емкостью М особей. Это означает, что М —
максимальная численность популяции, которую эта среда может поддерживать в
течение длительного времени (потенциальная емкость экологической системы может быть
ограничена, например, количеством максимального доступного продовольствия).
Пример 4
Если мы возьмем к
ние E) примет вид
0,0004 и М = 150, то логистическое уравне-
dP
—= 0,0004РA50-
dt
Р) = 0,06Р - 0,0004Р2
F)
Положительный член 0,06Р справа в F) соответствует естественному
приросту 6% в год (время t измеряется в годах). Отрицательный член
—0,0004Р2 представляет подавление роста из-за ограниченных
ресурсов среды обитания.
На рис. 1.3.8 показано поле направлений уравнения F) вместе с
интегральными кривыми, соответствующими возможным различным
начальным значениям численности населения Р@). Обратите внимание,
что все эти интегральные кривые, кажется, асимптотически
приближаются к горизонтальной линии Р = 150. Это значит, что численность
населения P(t) приближается к ограничению численности населения
P(t) при t «-► оо независимо от начальной численности населения. ■
300
250
200
*« 150
100
50
0
i \ \\
\\ \
***(*^»^"
0
\\ \ \
\\\ \
\ V s
«*pZ^
25
i ■ ' !■ i 1
\ \ \ \ \ \ \ \ \
\\\ч\\\\\"
NNNNNNNN4-
50 75 10
t
Рис. 1.3.8. Поле направлений и типичные
интегральные кривые уравнения Р' = 0,06Р - 0,0004Р2
Комментарий. Если начальная численность населения равна Р@) = 150, то
уравнение F) дает
Р'@) = 0,0004A50) A50 - 150) = 0,
так что численность населения не изменяется. Поэтому она остается неизменной и,
следовательно, P(t)=150 — постоянное "равновесное решение" дифференциального уравнения.
Если начальная численность населения больше, чем 150, то начальный приросй, как видно
из F), отрицателен, так что численность населения начинает уменьшаться немедленно. Но
если начальная численность населения меньше, чем 150, то начальный прирост, как видно
из F), положителен, так что численность населения немедленно начинает увеличиваться.
Поэтому весьма разумно заключить, что численность населения приблизится к значению
ограничения 150 независимо от (положительной) начальной численности населения. ■
52 Глава 1. Дифференциальные уравнения первого порядка
Существование и единственность решения
Прежде чем пытаться решить данное дифференциальное уравнение, полезно знать, су-
ществуют ли решения на самом деле. Часто важно также знать, есть ли только одно
решение уравнения, удовлетворяющее данному начальному условию, т. е. единственно
ли решение.
Пример 5
(а) [Решение не существует.] Задача Коши (задача с начальными
условиями)
</ = -, у@)= О
G)
не имеет решения, потому что ни одно решение у(х) = $(l/x) dx =
= In |х|+С дифференциального уравнения не определено в точке х = 0.
(Ь) [Несколько решений.] С другой стороны, легко проверить, что
задача Коши (задача с начальными условиями)
у' = 2^у, 2/@) = 0
(8)
имеет два различных решения у\{х) = х2 и уч(х) = 0 (см. задачу 27).И
Пример 5 иллюстрирует тот факт, что, прежде чем говорить о решении задачи Коши
(задачи с начальными условиями), мы должны знать, что данное уравнение имеет
одно и только одно решение. Вопросы существования и единственности решений также
опираются на процесс математического моделирования. Предположим, что мы изучаем
физическую систему, поведение которой полностью определено некоторыми начальными
условиями, но предложенная нами математическая модель содержит дифференциальное
уравнение, не имеющее единственного решения, удовлетворяющего поставленным
условиям. Тогда возникает вопрос, правильно ли математическая модель моделирует
физическую систему.
Приведенная ниже теорема утверждает, что задача Коши (задача с начальными
условиями) у' = f(x, у), у(а) = Ъ имеет одно и только одно решение, определенное в
окрестности точки х = а на оси х при условии, что и функция /, и ее частная производная
df/ду непрерывны в окрестности точки (а, 6) в плоскости ху. Методы доказательства
теоремы существования и единственности обсуждаются в приложении к книге.
Теорема 1
Существование и единственность решения
Предположим, что функция f(x,y) и ее частная производная Dyf(x,y) непрерывны на
некотором прямоугольнике^ плоскости ху, внутри которого расположена точка (а, 6).
Тогда для некоторого открытого интервала /, содержащего точку а, задача Коши (задача
с начальными условиями)
£-><*■»>■
у{а) = Ь
(9)
имеет одно и только одно решение, которое определено на интервале /. А
1.3. Поля направлений и интегральные кривые 53
Замечание 1. В случае дифференциального уравнения dy/dx = — у примера 1
и рис. 1.3.2,с функция f{x,y) = —у и частная производная df/dy = — 1 непрерывны
всюду, так что теорема 1 гарантирует существование единственного решения для любых
начальных данных (а, 6). Хотя теорема гарантирует существование только на некотором
открытом интервале, содержащем точку х = а, каждое решение у(х) = Се~х фактически
определено для всех х.
Замечание 2. В случае дифференциального уравнения dy/dx = —2 у/у примера 5
(Ь) и уравнение (8), и функция f(x, у) = —2у/у непрерывны везде, где у > 0, но частная
производная df/dy = 1/^/у имеет разрыв при у = 0 и, следовательно, в точке @,0).
Именно поэтому там могут существовать два различных решения yi(x) = х2 и у2(х) = 0,
каждое из которых удовлетворяет начальному условию у@) = 0.
Замечание 3. В примере 7 из раздела 1.1 мы исследовали особенно простое
дифференциальное уравнение dy/dx = у2. Здесь мы имеем f(x,y) = у2 и df/dy = 2у.
Обе эти функции непрерывны всюду в плоскости ху и, в частности, в прямоугольнике
-2 < х < 2, 0 < у < 2. Поскольку точка @,1) находится внутри этого прямоугольника,
теорема 1 гарантирует единственность решения (решением считается только непрерывная
функция!) задачи Коши (задачи с начальными условиями)
> % = у2> у@) = 1 A0)
на некотором открытом интервале изменения х, содержащем а = 0. Действительно, это
решение
у№ = I—z
1-х
мы обсуждали в примере 7. Но у(х) = 1/A — х) терпит разрыв при х = 1, так что наше
единственное непрерывное решение не существует на всем интервале — 2 < х < 2. Таким
образом, в данном случае интервал / теоремы 1, на котором существует решение, может
не быть столь же широким, как прямоугольник R, в котором / и df/dy непрерывны.
Геометрическая интерпретация причины заключается в том, что интегральная кривая,
существование которой гарантируется теоремой, может выйти за пределы
прямоугольника, в котором гарантируется существование решения дифференциального уравнения,
причем выйти она может до того, как достигнет одного или обоих концов интервала
(см. рис. 1.3.9). ■
Следующий пример показывает, что если функция f(x,y) или ее частная производная
df/dy не удовлетворяет условию непрерывности теоремы 1, то задача Коши (задача
с начальными условиями) (9) может либо не иметь ни одного решения, либо иметь много
решений — даже бесконечно много!
Пример 6
Рассмотрим дифференциальное уравнение первого порядка
х^- = 2у. A1)
dx
Применяя теорему 1 для /(х, у) = 2у/х и df/dy = 2/х, мы заключаем,
что уравнение A1) должно иметь единственное решение в окрестности
54
Глава 1. Дифференциальные уравнения первого порядка
(О,*) @,0)
4Ь
* 2Ь
-2
ь ■
1
Ь= 1/A-х)!
чо,1) ! j
i *
i
-4
Рис. 1.3.9. Интегральная кривая
проходит через начальную точку @,1), но
покидает прямоугольник R прежде, чем
достигает правого конца интервала I
* о
Рис. 1.3.10. Через точку @,0)
проходит бесконечно много интегральных
кривых, но ни одна интегральная
кривая не проходит через точку @,6) при
ЪфО
любой точки в плоскости ху, где х Ф 0. Действительно, подстановкой
в A1) легко убедиться, что
у(х) = Сх2
A2)
удовлетворяет уравнению A1) для любого значения константы С и для
всех значений переменной #. В частности, задача Коши (задача с
начальными условиями)
ХТх = ^
2/@) = 0
A3)
имеет бесконечно много различных решений, причем интегральными
кривыми являются параболы у = Сх2, показанные на рис. 1.3.10.
(В случае С = 0 "парабола""— это фактически ось х с уравнением
У = 0.)
Заметьте, что все эти параболы проходят через начало координат
@,0), но ни одна из них не проходит ни через какую-либо другую
точку оси у. Из этого следует, что задача Коши (задача с начальными
условиями) A3) имеет бесконечно много решений, но задача Коши
(задача с начальными условиями)
mdy_
dx
2у, 2/@) = Ъ
A4)
не имеет ни одного решения при 6^0.
Наконец, обратите внимание, что через любую точку, не лежащую
на оси 2/, проходит только одна из парабол у — Сх2. Следовательно,
если а ф 0, то задача Коши (задача с начальными условиями)
&у_
dx
2?/, у(а) = Ь
A5)
1.3. Поля направлений и интегральные кривые 55
имеет единственное решение на любом интервале, который содержит
точку х = а, но не содержит начало координат х = 0. Иными словами,
задача Коши (задача с начальными условиями) A5)
• имеет единственное решение в окрестности (а, 6), если а ф 0;
• не имеет ни одного решения, если а = 0,но 6^0;
• имеет бесконечно много решений, если а = Ь = 0. ■
Все же о задаче Коши (задаче с начальными условиями) A5) нужно сказать
больше. Рассмотрим произвольную начальную точку, не лежащую на оси у, например точку
(—1,1), показанную на рис. 1.3.11.
* о
-2h
у = я~
J-1,1)
@,0)
-1
о
1
Рис. 1.3.11. Через точку A,-1) проходит бесконечно
много интегральных кривых
Тогда для любого значения константы С функция, определенная формулой
»«-{£>.
если х < 0,
если х > 0
непрерывна и является решением задачи Коши (задачи с начальными условиями)
Н£=2*
y(-i) = 1.
A6)
A7)
Для конкретного значения С интегральная кривая, определенная равенством A6), состоит
из левой половины параболы у = х2 и правой половины параболы у = Сх2. Таким
образом, единственная интегральная кривая в окрестности точки (—1,1) в начале координат
переходит в бесконечно многие интегральные кривые, показанные на рис. 1.3.11:
Отсюда мы видим, что теорема 1 (если ее условия удовлетворены) гарантирует
единственность решения только в окрестности начальной точки (а, 6), но интегральная кривая,
проходящая через (а, 6) может где-нибудь в другом месте разветвиться, и потому
единственность интегральной кривой в целом гарантировать нельзя. Таким образом, решение
может существовать на большем интервале, чем тот, на котором решение единственно..
Например, решение у(х) = х2 задачи Коши (задачи с начальными условиями) A7)
существует на всей оси абсцисс, но это решение единственно только на отрицательной полуоси
х (т. е. при —сх) < х < 0).
56 Глава 1. Дифференциальные уравнения первого порядка
1.3. Задачи
В задачах 1-10 мы нарисовали поле направлений указанного дифференциального уравнения, а
также одну или несколько интегральных кривых. Схематически нарисуйте интегральные кривые,
проходящие через дополнительные точки, отмеченные в каэюдом поле направлений.
dy^
dx
1.
-у-
\ \ \ \ \ \ \
2 UV \ ^ * \ \ V U#\ \ \ i \ \ \»*-
\\\\\\\\\
\\\\\\\\\"
ч\\\\\\\\
-2 К
2-t=x+y
-2h
Рис. 1.3.12
* dy
3. -г- = У — sin х
dx
Рис. 1.3.13
A dV
4'1х-=Х~У
Рис. 1.3.14
Рис. 1.3.15
1.3. Поля направлений и интегральные кривые
5 ^
dx
у-х + 1
i2—,+i
Рис. 1.3.16
dy
7. — = sin ж -f sin у
dx
Рис. 1.3.17
8-^ = х -у
ч \ \*\ \ \ \ \ чЧ
\\Ч*\\\\\\|
\\^\\\\\ч|
\\\\\\\wi
У У }///// У
У /////*// /
/////////.
/////////
/ / / / / /W / /
/////////
V ///////
У / / / / /g /
-2 -1
-2-10 1
9. ^
eta
Рис. 1.3.18
2
Ж
У"
Рис. 1.3.19
10. -г- = —х2 + sin V
Рис. 1.3.20
Рис. 1.3.21
58 Глава 1. Дифференциальные уравнения первого порядка
В задачах 11-20 определите, гарантирует ли теорема 1 существование решения данной задачи
Коши (задачи с начальными условиями). Если существование гарантируется, определите,
гарантирует ли теорема 1 единственность этого решения.
И. g=2xV; 2/A) = -1 12. £= a: In у; уA) = 1
13. g = № 2/@) = 1 14. £ = № У@) = 0
15.^ = 0^; уB) = 2 16. g = V^y; 2/B) = 1
17. у£ = х - 1; у@) = 1 18. у£ = х - 1; уA) = 0
19. |* = ln(l + у2); y@) =0 20. £ = х2 - у2; у@) = 1
В задачах 21 и 22 сначала используйте метод примера 2, чтобы создать поле направлений для
данного дифференциального уравнения. Затем сделайте набросок интегральной кривой,
соответствующей данному начальному условию. Наконец, используйте эту интегральную кривую, чтобы
оценить требуемое значение решения у(х).
21. t/ = x + y, у@) = 0; у(-4)=? 22. у' = у - х9 2/D) = 0; у(-4) =?
Задачи 23 и 24 подобны задачам 21 и 22, но на этот раз для вычерчивания и распечатки поля
направлений данного дифференциального уравнения используйте систему компьютерной алгебры.
Если вы желаете (и знаете, как), можете проверить сделанные вами вручную наброски
интегральных кривых, построив их с помощью компьютера.
23. y' = a?2+i/2-l, 2/@) = 0; 2/B)=? 24. у/ = х + |г/2, г/(-2) = 0; г/B) =?
25. Вы прыгаете из вертолета (пример 3) и тянете вытяжной трос вашего парашюта. Теперь к =
= 1,6 в уравнении C), так что ваша скорость убывает и является решением задачи Коши (задачи
с начальными условиями)
^ = 32-l,6v, v@) = 0.
at
Чтобы оценить шансы на выживание, нарисуйте поле направлений для этого
дифференциального уравнения и сделайте набросок соответствующей интегральной кривой. Чему равна
предельная скорость? Стратегически расположенный стог сена даст какой-либо прок? Сколько
времени потребуется, чтобы достичь 95% предельной скорости? '
26. Предположим, что численность популяции оленей P(t) в маленьком лесу удовлетворяет
логистическому уравнению
^ = 0,0225Р - 0,0003Р2.
at
Нарисуйте поле направлений и подходящую интегральную кривую, чтобы ответить на
следующие вопросы. Если в момент времени t = 0 есть 25 оленей и t измеряется в месяцах, то через
какое время число оленей удвоится? Чему равно предельное число оленей?
Следующие семь задач иллюстрируют тот факт, что, если условия теоремы 1 не выполнены, то
задача Коши (задача с начальными условиями) у' — /(ж, у), у (а) = Ь может не иметь ни одного
решения, может иметь конечное множество решений и может иметь бесконечно много решений.
1.-3. Поля направлений и интегральные кривые 59
27. (а) Проверьте, что если с константа, то кусочно определенная функция
для х ^ с,
■ с) для х > с
удовлетворяет дифференциальному уравнению у' — 2у/у для всех х (включая точку х =
= с). Создайте рисунок, иллюстрирующий тот факт, что задача Коши (задача с начальными
условиями) у' = 2^/у, у@) = 0 имеет бесконечно много различных решений. (Ь) Для каких
значений b задача Коши (задача с начальными условиями) у' = 2у/у, г/@) = b (i) не имеет ни
одного решения, (ii) имеет единственное решение, которое определено для всех х?
28. Проверьте, что если к константа, то функция у(х) = кх удовлетворяет дифференциальному
уравнению ху' = у для всех х. Нарисуйте поле направлений и несколько прямых, являющихся
интегральными кривыми. Затем определите количество различных решений задачи Коши
(задачи с начальными условиями) ху1 — у, у (а) = b в зависимости от значений а и 6. Иными
словами, при каких а и 6 рассматриваемая задача Коши имеет одно, ни одного или бесконечно
много решений?
29. Проверьте, что если с константа, то кусочно определенная функция
_ JO для х ^
1 (х — сK для х >
удовлетворяет дифференциальному уравнению у' = Зу2//3 для всех х. Можно ли также
использовать "левую половину" кубической параболы у — (х — сK для склеивания интегральной
кривой дифференциального уравнения? (Рис. 1.3.22.) Сделайте набросок разнообразных таких
интегральных кривых. Существует ли точка (а, Ь) на плоскости ху такая, что задача Коши
(задача с начальными условиями) у' = Зг/2//3, у (а) = b либо не имеет ни одного решения,
либо имеет единственное решение, которое определено для всех х? Сопоставьте ваш ответ
с теоремой 1.
30. Проверьте, что если с константа, то кусочно определенная функция
у(х) = {
-hi,- если х ^ с,
cos(x — с), если с < х < с -h 7г,
—1, если х ^ с,
удовлетворяет дифференциальному уравнению у' = — л/1 — у2 для всех х. (Возможно, будет
полезен предварительный эскиз для с = 0.) Сделайте набросок разнообразных интегральных
кривых. Затем определите, сколько различных решений имеет задача Коши (задача с
начальными условиями) у' = —у/1 — у2, у (а) = b в зависимости от значений а и 6.
31. Для дифференциального уравнения у' = -\-\Jl — у2 выполните исследование, подобное
проведенному в задаче 30. Достаточно ли просто заменить cos(x — с) на sin(x — с) в склееном
решении, которое определено для всех xl
32. Проверьте, что если с > 0, то кусочно определенная функция
w-fe
У^> ~ ^ /„2 ^2 2
если х2 ^ с,
сJ, если х2 > с,
удовлетворяет дифференциальному уравнению у' = 4хх/у для всех х. Сделайте набросок
разнообразных интегральных кривых для различных значений с. Затем определите, сколько
различных решений имеет задача Коши (задача с начальными условиями) у' = 4ху/у, у (а) = 6
в зависимости от значений а и Ь.
60 Глава 1. Дифференциальные уравнения первого порядка
У = (х-с?.
/
I
Рис. 1.3.22. Предложение для
задачи 29
\ \
\ \
^ \
—-
к^^
I
— —
.
^ \
\ \
\ \
\
\
\
\
^
—
\
\
\
\
\ 1 1
\ \ 1
\ \ 1
\ \ 1
^-\. V-
"--^^ч
\
\ \ 1
\ \ 1
\ 1 1
\ 1 1
1 ;ii \ \ \ \
1 \\\ \ \ \
i ;\ \ \ ^ ^
1 N чХ^С ^
; ^„-^-^ =Г^::
\ -*\
i|;\ \ ^ - -
1 1А \ \ \ ^
i и \ \ \ \
1 |;l \ \ \ \
Рис. 1.3.23. Поле направлений
уравнения х2у' + у2 = 0 и график
решения у(х) = х/(сх — 1)
33. Пусть с ф 0. Проверьте, что функция, определенная равенством у(х) = х/(сх — 1) (ее график
приведен на рис. 1.3.23), удовлетворяет дифференциальному уравнению х2у' 4- у2 = 0, если
х ф 1/с. Сделайте набросок разнообразных интегральных кривых для различных значений с.
Кроме того, обратите внимание на константу-функцию у(х) = 0, которая не получается ни
при каком выборе константы с. Наконец, определите, сколько различных решений задача Коши
(задача с начальными условиями) х2 yf -f у2 = 0, у (а) — Ь имеет в зависимости от значений а
и Ъ.
1.3. Приложение. Автоматизация вычерчивания
полей направлений и интегральных кривых
Широко доступные системы компьютерной алгебры и технические вычислительные
среды имеют средства автоматизации построения полей направлений и интегральных
кривых. Кроме того, такие средства встроены и в некоторые графические калькуляторы
(рис. 1.3.24).
Средства для исследования дифференциальных уравнений предусмотрены почти
во всех универсальных математических пакетах, таких как Maple®, Mathematical
и Matlab®. Например, команда пакета Maple
with(DEtools) :
DEplot(diff(у(x),x)=sin(x-y(x)), у(х) ,
,5, y=-5..5);
и команда системы Mathematica
« Graphics\PlotField.m
PlotVectorField[{l, Sin[x-y]},
{x, -5, 5}, {y, -5, 5}]
строят поля направлений, подобные показанным на рис. 1.3.25. Этот рисунок
непосредственно был построен программой df ield, написанной на входном языке системы
Matlab (John Polking and David Arnold, Ordinary Differential Equations Using Matlab
Bnd ed.), издательство Prentice Hall, 1999 (Джон Полкинг и Дэвид Арнольд, Обыкно-
1.3. Поля направлений и интегральные кривые
61
Рис. 1.3.24. Машинно-генерируемое поле направлений
и интегральные кривые дифференциального уравнения
dy . . ч
— = sin(a? - у),
проходящие через точки (О, Ь) при Ь = —3, —1, —2,0,2,4
в прямоугольнике — 5 < х, у < 5 на дисплее графического
калькулятора TI-89
венные дифференциальные уравнения. Применение MATLAB B-е изд.)). Эта программа
бесплатна для использования в целях образования (math.rice.edu/~dfield). Когда
дифференциальное уравнение введено в меню установки программы df ield (рис. 1.3.26),
вы можете (щелчками кнопки мыши) начертить и поле направлений, и интегральную
кривую (или кривые), проходящую через любую указанную точку (или точки). Еще один
бесплатный и дружественный пользователю пакет для решения ОДУ на основе MATLAB
с внушительными графическими способностями — lode (www.math.uiuc.edu/iode).
Рис. 1.3.25. Машинно-генерируемое поле направлений
и интегральные кривые дифференциального уравнения
у' = sin(x - у)
Используйте графический калькулятор или компьютерную систему в следующих
исследованиях. Вам пришлось бы хорошенько попотеть, если бы пришлось рисовать поля
направлений и некоторые интегральные кривые из задач 1-10 в этом разделе.
Исследование А. Начертите поле направлений и типичные интегральные кривые
дифференциального уравнения dy/dx = sin(x — у), но в большем прямоугольнике, чем на
62 Глава 1. Дифференциальные уравнения первого порядка
ж
Рис. 1.3.26. Окно пакета Matlab для задания параметров df ield с
целью вычерчивания поля направлений и интегральных кривых уравнения у' =
= sin (х — у)
рис. 1.3.25. Например, в квадрате —10 й х й 10, —10 ^ у й 10 должно быть видимо
множество интегральных кривых линий, являющихся прямыми.
(a) Подставьте у — ах + Ь в дифференциальное уравнение, чтобы определить, какими
должны быть коэффициенты аиЬ, чтобы получить решение.
(b) Система компьютерной алгебры дает общее решение
у(х) = х -
2 arctg I -
2-С
х-С
)•
Можете ли вы определить значение произвольной постоянной С, при котором
получается линейное решение у = х — (тг/2), удовлетворяющее начальному условию
у(тг/2) = 0?
Исследование В. Пусть п — наименьшая цифра в номере вашего студенческого билета,
которая больше 1. Рассмотрите дифференциальное уравнение
-— = — COsix — Пу).
ах п
(a) Сначала исследуйте (как в части (а) исследования А) наличие интегральных
кривых, являющихся прямыми.
(b) Затем нарисуйте поле направлений этого дифференциального уравнения, причем
прямоугольник, в котором будете рисовать поле направлений, выберите таким,
чтобы вы могли изобразить некоторые из этих прямых линий. Не поленитесь
нарисовать столько нелинейных интегральных кривых, чтобы вы смогли
сформулировать догадку о том, что случается с у(х), когда х —> +оо. Сформулируйте ваш
вывод настолько явно, насколько сможете. Задав начальное значение у@) = уо>
попробуйте предсказать (возможно, в зависимости от значения уо), как у(х) ведет
себя при х —> +оо.
1.4. Уравнения с разделяющимися переменными и приложения 63
(с) Система компьютерной алгебры дает общее решение
\Х + 2arctg |
у(х) = -
п
\x-Cj\-
Можете ли вы увидеть связь между этим символическим решением и вашими
графиками, на которых изображены интегральные кривые (прямые линии или
другие кривые)?
1.4. Уравнения с разделяющимися переменными
и приложения
Дифференциальное уравнение первого порядка
% = Н{х,у) A)
называется дифференциальным уравнением с разделяющимися переменными2, если
Я(х, у) можно зацисать как произведение функции от х на функцию от у:
где h(y) = l/f(y). В этом случае переменные х и у могут быть отделены —
изолированы в противоположных частях уравнения. Для этого уравнение нужно записать в виде
уравнения
f(y) dy = g(x) dx,
которое мы формально считаем кратким обозначением дифференциального уравнения
Ну)^ = 9(х). B)
Очень просто решить дифференциальное уравнение этого специального типа. Достаточно
просто проинтегрировать обе части по х:
^f(y(x))^dx = ^g(x)dx + C;
\№dy = \g(x)dx + C. C)
Требуется лишь найти примитивные
F{y) = \f{y)dy и G(x) = ^g(x)dx.
эквивалентно
2Иногда встречается и название дифференциальное уравнение с отделяющимися переменными. —Примеч.
ред.
64 Глава 1. Дифференциальные уравнения первого порядка
Чтобы убедиться, что уравнения B) и C) эквивалентны, обратите внимание на
следующую цепочку равенств:
Dx[F(y(x))} = F'(y(x))y'(x) = /(y)£ = д(х) = Dx[G(x)},
которая в свою очередь эквивалентна равенству ,
F(y(x)) = G(x) + C, D)
потому что две функции имеют ту же самую производную на интервале тогда и только
тогда, когда они отличаются на константу на всем интервале.
Пример 1
Решим задачу Коши (задачу с начальными условиями)
dy
dx -бжу, 2/@) = 7.
Решение Выражаясь несколько неофициально, наши действия можно описать
так: сначала мы делим обе части дифференциального уравнения на у
и умножаем каждую часть на dx. В результате получится уравнение
— = —6xdx.
У
Следовательно,
[±= l(-6x)dx-
ln|y| = -3x2 + C.
Из начального условия у@) = 7 мы находим, что у (х) положительно
в окрестности х = 0, так что мы можем опустить символы абсолютной
величины:
\пу = -Зх2 + С,
и, следовательно,
у(х) = е*2+с = е*2ес = Ае~3х\
где А = ес. Условие у@) = 7 дает А = 7, так что искомое решение
будет
у{х) = 7е-**\
Это верхняя жирная интегральная кривая, показанная на
рис. 1.4.1. ■
Замечание. А теперь предположим, что начальное условие в примере 1 было
следующее: у@) = —4. Тогда из этого следовало бы, что у(х) отрицательно в окрестности
1.4. Уравнения с разделяющимися переменными и приложения
65
@,7)
х @, -4)
Рис. 1.4Л. Поле направлений и интегральные кривые
уравнения у' = — бху из примера 1
х = 0. Мы должны поэтому заменить |у| на —у в проинтегрированном уравнении In \y\
= -Зг2 + С, чтобы получить
1п(-у) = -Зх2 + С.
Начальное условие тогда даст С = In 4, так что \п(—у) = —Зх2 + In 4, и потому
у(х) = -4е-3*\
Это нижняя жирная интегральная кривая на рис. 1.4.1.
Пример 2
Решим дифференциальное уравнение
4-2х
dy
dx
Зу2-Ъ'
Решение Отделив переменные и проинтегрировав обе части, получим
^Cy2-b)dy = ^D-2x)dx;
у3 - Ъу = 4х - х2 + С.
E)
F)
Это уравнение не разрешено относительно у9 т. е. у не выражено в виде
явной функции х. ■
Пример 2 иллюстрирует, что на практике решение уравнения D) (функция у) не
обязательно должно быть задано как явная функция переменного х. В этом случае мы считаем
D) неявным решением дифференциального уравнения B). Таким образом, уравнение F)
дает неявное решение дифференциального уравнения E). Хотя решить уравнение F), т. е.
найти у как явную функцию х, неудобно, мы видим, что каждая интегральная кривая
у = у(х) лежит на линии уровня (на контурной линии) функции
Н(х, у) = х2 - 4х + у3 - Ьу,
66
Глава 1. Дифференциальные уравнения первого порядка
т. е. на кривой, на которой функция Н{х, у) = х2 — 4х 4- у — Ъу постоянна. На рис. 1.4.2
показаны несколько линий уровня.
Пример 3
Чтобы решить задачу Коши (задачу с начальными условиями)
4-2ж
&у_
dx
32/2-5'
2/A) = 3,
G)
мы делаем замену ж = 1иу = Зв уравнении F) и получаем С =
= 9. Таким образом, искомое частное решение у(х) определено неявно
уравнением
У
by — 4х — х2 + 9.
(8)
Соответствующая интегральная кривая у = у (х) лежит на верхней
линии уровня на рис. 1.4.2 — на той, которая проходит через точку
A,3). Поскольку график дифференцируемого решения нигде не может
иметь вертикальной касательной, из рисунка видно, что это частное
решение определено на интервале (—1,5), а не на интервале (—3, 7).И
Замечание 1. Если конкретное значение х подставить в уравнение (8), можно найти
числовое значение у. Например, подставив х = 4, получим уравнение
f(y) = У3 ~ % - 9 = 0.
На рис. 1.4.3 показан график функции /. С помощью графического калькулятора мы
можем решить это уравнение и найти единственный действительный корень у « 2,8552.
Это даст значение уD) « 2,8552 из частного решения в примере 3.
Замечание 2. Если начальное условие в G) заменено условием уA) = 0, то
полученное частное решение дифференциального уравнения в E) лежит на нижней "половине"
овальной контурной кривой, изображенной на рис. 1.4.2. Это частное решение,
проходящее через точку A,0), определено на интервале @,4), а не на интервале (—1,5). С другой
-6-4-2 0
Рис. 1.4.2. Поле направлений и
интегральные кривые уравнения у' = D —
— 2х)/{Ъу2 — 5) из примера 2
20
15
10
5
§ °
-5
-10
-15
-20
1 |
- ..j..., ....
--•! ;
1 •• ■;
' ( i
| П 1
....j.. .1; . J
- j--|-j н
• f ■]
\ •-•]/ = J
-"-! Н
1 i 1
> -4 -2 0 2 4 6
У
Рис. 1.4.3. График функции
Ну)-
= у3-5у-{
5
1.4. Уравнения с разделяющимися переменными и приложения 67
стороны, для начального условия уA) = —2 мы получаем нижнюю линию уровня на
рис. 1.4.2. Это частное решение определено для всех х. Таким образом, от начального
условия может зависеть, определено ли частное решение на всей линии или только на
некотором ограниченном интервале. Воспользовавшись системой компьютерной
алгебры, можно легко вычислить таблицу значений у, являющихся решениями уравнения (8),
для значений жотх = —1дож = 5 (например) с желаемым шагом (приращением)
аргумента х. Такая таблица значений фактически служит "числовым решением" задачи Коши
(задачи с начальными условиями) G). ■
Неявные и особые решения
Вообще говоря, уравнение К(х, у) = 0 называют неявным решением
дифференциального уравнения, если оно удовлетворяется (на некотором интервале) некоторым решением
у = у(х) дифференциального уравнения. Но заметьте, что частное решение у = у(х),
полученное из уравнения К(х,у) = О, не обязано удовлетворять заданное начальное
условие. Например, дифференцирование х2 4- у2 = 4 дает
х + у
dx
О,
так что х2 + у2 = 4 — неявное решение дифференциального уравнения х + уу' = 0. Но
только первое из двух явных решений
у(ж) = +\/4 — х2 и у(х) = — \/4 — х2
удовлетворяет начальному условию у@) = 2 (рис. 1.4.4).
-3 -2-10 1
Рис. 1.4.4. Поле направлений и интегральные кривые
уравнения у' = — х/у
Рассуждение, приведенное перед примером 1, показывает, что каждое частное решение
уравнения B) удовлетворяет уравнению D) для некоторого значения С; именно поэтому
удобно D) назвать общим решением уравнения B).
Предупреждение.
уравнения
Предположим, однако, что мы начинаем с дифференциального
dy
dx
= д(Ф(у)
(9)
68 Глава 1. Дифференциальные уравнения первого порядка
и делим обе его части на h(y), чтобы получить уравнение с разделенными переменными
1 dy
h(y) dx
= 9(х).
A0)
Если уо — корень уравнения h(y) = 0, т. е. если h(yo) = 0, то постоянная функция у(х) =
= уо, несомненно, представляет собой решение уравнения (9), но оно может не
содержаться в общем решении уравнения A0). Таким образом, решения дифференциального
уравнения можно потерять в результате деления на обращающийся в нуль множитель,
(Действительно, посторонние решения могут быть получены после умножения на
обращающийся в нуль множитель. Это явление подобно появлению посторонних корней при
решении алгебраических уравнений.)
В разделе 1.5 мы увидим, что каждое частное решение линейного дифференциального
уравнения первого порядка содержится в его общем решении. Однако обычно
нелинейное дифференциальное уравнение первого порядка имеет и общее решение, содержащее
произвольную постоянную С, и одно или несколько частных решений, которые не могут
быть получены ни при каком значении С. Эти исключительные решения часто называют
особыми решениями. В задаче 30 мы просим показать, что общее решение
дифференциального уравнения {у'J = Ау представляет собой семейство парабол у = (х — СJ,
показанных на рис. 1.4.5, и заметить, что константа-функция у(х) = 0 — особое решение,
которое не может быть получено из общего решения никаким выбором произвольной
постоянной С.
Рис. 1.4.5. Общие интегральные кривые у = {х — СJ
и особая интегральная кривая у — 0 дифференциального
уравнения {у'J = 4у
Пример 4
Найдем все решения дифференциального уравнения
dy
dx
= 6x(y-lJ/\
1.4. Уравнения с разделяющимися переменными и приложения 69
Решение Разделение переменных дает
y(x) = l + (x2 + Cf.
Положительные значения произвольной постоянной С дают те из
интегральных кривых, показанных на рис. 1.4.6, которые лежат выше линии
у = 1, тогда как отрицательные значения дают интегральные кривые,
лежащие ниже ее. Значение С = 0 дает решение у(х) = 1 + ж6, но ни
одно значение С не дает особое решение у(х) = 1, которое было
потеряно в результате разделения переменных. Обратите внимание, что
два различных решения у{х) = 1 и у{х) = 1 + (х2 — IK удовлетворяют
начальному условию уA) = 1. Действительно, вся особая
интегральная кривая у = 1 состоит из точек, в которых решение не единственно,
а функция /(ж, у) = 6х(у — IJ/3 не дифференцируема. ■
Рис. 1.4.6. Общие и особые интегральные кривые
уравнения у' = 6х(у — IJ/3
Естественный рост и распад
Дифференциальное уравнение
dx
—- = кх (к константа)
at
(и)
служит математической моделью для невероятно широкого диапазона естественных
явлений — всех тех, в которых скорость изменения некоторой величины пропорциональна
ее текущему значению. Вот некоторые примеры.
\
Прирост популяции. Предположим, что P(t) — численность популяции (людей,
насекомых или бактерий), у которой постоянны показатели рождаемости и смертности /3 и S
70 Глава 1. Дифференциальные уравнения первого порядка
(количество рождений и случаев смерти на определенное количество особей в единицу
времени). Тогда в течение короткого временного интервала At происходит
приблизительно /3P(t)At рождений и SP(t) At случаев смерти, так что P(t) изменяется приблизительно
на
АР « (/3 ^ 6)P(t)At,
и поэтому
где к = /3 — 5.
dP _. АР 1П
— = km —- = fcP, A2)
dt At-+o At
Сложные проценты. Пусть A(t) — сумма (в долларах) на сберегательном счету в
момент времени t (в годах). Кроме того, пусть сложные проценты начисляются непрерывно
с ежегодной процентной ставкой г. (Обратите внимание, что 10%-ной ежегодной ставке
соответствует значение г = 0,10.) Непрерывное начисление сложных процентов означает,
что в течение короткого временного интервала At на счет добавляется приблизительно,
АА = rA(t)At9 так что
dA _. АЛ . ,_ч
—- = km -— = г А. A3)
dt At-+o At
Радиоактивный распад. Пусть образец некоторого вещества содержит N(t) атомов
некоторого радиоактивного изотопа в момент времени t. Известно, что некоторая часть
радиоактивных атомов спонтанно распадется (преврацаясь в атомы другого элемента или
в другой изотоп того же самого элемента) в течение каждой единицы времени.
Следовательно, образец ведет себя точно так, как население с постоянным показателем
смертности и нулевым приростом (атомы не рождаются). Чтобы написать уравнение модели для
N(t)9 мы используем уравнение A2), в котором N займет место Р, а к > 0 подставим
вместо S и положим /3 = 0. Таким образом мы получим дифференциальное уравнение
Значение к зависит от вида радиоактивного изотопа.
Ключ к радиоуглеродному методу, позволяющему датировать образец, состоит в том,
что в любом живом существе отношение количество атомов углерода к количеству атомов
радиоактивного изотопа углерода 14С постоянно. Это отношение остается постоянным,
потому что процент 14С в атмосфере остается почти постоянным, живые организмы
непрерывно потребляют углерод из воздуха или из других живых организмов, в которых
содержатся атомы 14С в том же самое постоянном соотношении к обыкновенным атомам
12С. Это же самое соотношение характерно для всех живых организмов, потому что
процессы, протекающие в живых организмах, с химической точки зрения, кажется, не
зависят от различий между этими двумя изотопами.
Отношение 14С к обычному углероду в атмосфере рстается постоянным, потому что,
хотя 14С радиоактивен и медленно распадается, его количество непрерывно пополняется
из-за превращения 14N (обыкновенного ^зота) в 14С под воздействием космических
лучей в верхних слоях атмосферы. За весьма длительную историю планеты, этот процесс
распада и пополнения вошел в почти установившееся состояние.
1.4. Уравнения с разделяющимися переменными и приложения 71
Конечно, когда организм умирает, метаболизм углерода в нем прекращается, и в нем
в процессе радиоактивного распада начинает уменьшаться содержание 14С. Так как после
смерти 14С не пополняется, отношение 14С к обычному углероду начинает уменьшаться.
Измеряя это отношение, можно узнать, сколько времени прошло после смерти организма.
Для таких целей необходимо измерить значение постоянной распада к. Для 14С оно
известно: к « 0,0001216, если t измеряется в годах.
(Метод не столь прост, как мы изложили его здесь. При применении методики
радиоуглеродного датирования приходится принимать меры чрезвычайной предосторожности,
чтобы избежать загрязнения образца органическими веществами или даже обыкновенным
свежим воздухом. Кроме того, очевидно, что поток космических лучей не был
постоянным, так что отношение 14С в атмосфере изменилось за прошедшие столетия.
Используя независимые метода датирования образцов, исследователи в этой области составили
таблицы поправочных коэффициентов, которые позволяют увеличить точность данного
метода.)
Выведение препарата из организма. Во многих случаях, когда количество A(t)
некоторого препарата превышает естественный уровень этого препарата в крови, скорость
уменьшения пропорциональна текущему избыточному количеству. Иными словами,
где А > 0. Параметр А называется константой выведения препарата.
Уравнение естественного роста
Дифференциальное уравнение вида dx/dt = кх при x(t) > 0 и постоянном
(отрицательном или положительном) к легко решается путем разделения переменных и последующим
интегрированием:
л*-/'
kdt;
1пж = Ы + С.
Затем мы решаем его относительно х:
е\пх = ekt+C. х = хф = eCekt = Aekt
Поскольку С — константа, А = ес. Также ясно, что А = х@) = хо, так что частное
решение уравнения A1) с начальным условием ж@) = хо — это просто
> x(t)=x0ekt. A6)
Решение этого уравнения содержит показательную функцию (с основанием, равным
основанию натуральных логарифмов), а само дифференциальное уравнение
> d-l=kX A7)
72 Глава 1. Дифференциальные уравнения первого порядка
*0
х = jc0 ea
(к>0)
Рис. 1.4.7. Естественный рост
Рис. 1.4.8. Естественный распад
часто называется уравнением экспоненциального роста, или уравнением
естественного роста. На рис. 1.4.7 показан типичный график x{t) в случае к > 0; случай к < 0
показан на рис. 1.4.8.
Пример 5
Согласно данным, приведенным в www.census.gov, полная численность
населения всего мира достигла 6 миллиардов человек в середине
1999 года и в то время увеличивалась со скоростью
приблизительно 212 тысяч человек в день. Принимая, что естественный прирост
населения продолжается с этой же скоростью, мы хотим ответить на
следующие вопросы.
(a) Каков ежегодный прирост fc?
(b) Какой будет численность мирового населения в середине
XXI столетия?
(c) Сколько потребуется времени, чтобы население в мире
увеличилось десятикратно, т.е. достигло 60 миллиардов? (Некоторые
демографы считают, что это максимальная численность населения, которое
планета может обеспечить адекватными запасами продовольствия.)
Решение (а) Мы измеряем численность мирового населения P(t) в миллиардах,
а время — в годах. Мы полагаем t = 0 для середины 1999 года, так что
Ро = 6. Поскольку Р увеличивается на 212000, или на 0,000212
миллиарда людей в день в момент времени t = 0, это значит, что
р'@) = @,000212)C65,25) « 0,07743
миллиардов в год. Из уравнения естественного роста Р'
t = 0 получаем
Р'@) 0,07743
кР при
к =
= 0,0129.
Р@) б
Таким образом, численность мирового населения ежегодно
возрастает приблизительно на 1,29% (по крайней мере, таким был прирост
в 1999 году). Это значение к дает функцию роста мирового населения
P(t) = бе
,0,0129t
1.4. Уравнения с разделяющимися переменными и приложения 73
(b) При t = 51 мы получаем предсказание численности мирового
населения
РE1) = бе@'0129^51) « 11,58 (миллиарда)
в середине 2050 года (так что население после 1999 года почти удвоится
за срок, чуть больший полстолетия).
(c) Численность мирового населения должна достигнуть 60
миллиардов, когда
In 10
60 = 6e°'0129t; т.е. когда t
0,0129
il78;
т. е. в 2177 году.
Обратите внимание. На самом деле ожидается, что скорость роста мирового
населения несколько замедлится в течение следующего полустолетия и лучшее текущее
предсказание для численности населения в 2050 году — "только" 9,1 миллиарда. Нельзя
ожидать, что простая математическая модель может точно отражать сложный реальный
мир.
Постоянная распада радиоактивного изотопа часто определяется через другую
эмпирическую константу, период полураспада изотопа, потому что обычно более удобен
именно этот параметр. Период полураспада т радиоактивного изотопа — время,
требуемое для распада половины этого вещества. Чтобы найти соотношение между к и т, мы
полагаем t = rnN= ^N0 в уравнении N(t) = N0ekt, так что ^N0 = N0ekT. Решив это
уравнение относительно т, найдем, что
In 2
к '
A8)
Например, период полураспада 14С т « Aп2)/@,0001216), т. е. приблизительно 5700 лет.
Пример б
Образец древесного угля, найденный в Стоунхедже, содержит 63% 14С
от его содержания в образце современного древесного угля равной
массы. Каков возраст найденного образца?
Решение Мы полагаем t = 0 в момент смерти дерева, из которого был взят
древесный уголь в Стоунхедже, и обозначаем через iV0 количество
атомов 14С, которые образец из Стоунхеджа содержал в момент смерти
дерева. Поэтому теперь N = @,63)ЛГ0, так что мы решаем уравнение
@,63)iVo = N0e~kt со значением к = 0,0001216. Таким образом, мы
находим
1п@,63)
* = -:
! 3800 (лет).
0,0001216
Таким образом, образцу приблизительно 3800 лет. Если этот образец
имеет что-нибудь общее со строительством Стоунхеджа, наши
вычисления позволяют предположить, что эта обсерватория, памятник или
храм — чем бы это сооружение ни было — построено не позже 1800
года до н.э. ■
74
Глава 1. Дифференциальные уравнения первого порядка
Охлаждение и нагревание
Согласно закону охлаждения Ньютона (уравнение C) из раздела 1.1), скорость изменения
температуры T(t) тела, погруженного в среду с постоянной температурой А,
пропорциональна разности А — Т. Иными словами,
dT
dt
к(А-П
A9)
где к — положительная константа. Это линейное дифференциальное уравнение первого
порядка с постоянными коэффициентами:
dx
— = ах + Ь.
at
B0)
Оно включает показательное уравнение как частный случай (Ь = 0) и также просто
решается разделением переменных.
Пример 7
4 фунта мяса, предварительно нагретые до 50° F, начинают жариться
в духовке при 375°F в 17:00. После 75 минут оказывается, что
температура T(t) равна 125° F. Когда температура жаркбго будет равна 150°F
(средний тип, не пережарено и не недожарено)?
Решение Мы измеряем время t в минутах, причем t = 0 соответствует 17:00.
Мы также предполагаем (несколько нереалистично), что в любой
момент температура T(t) жаркого одинакова по всему жаркому. Мы имеем
T(t) < А = 375, Т@) = 50 и ГG5) = 125. Следовательно,
^=fcC75-T);
[ dT= Ikdt:
J 375 - T J
- lnC75 - Г) = kt + С;
375 - Г = Бе-**.
Теперь из Г@) = 50 получаем В = 325, так что T(t) = 375 - 325е~Ч
Мы также знаем, что Т = 125 при t = 75. Подстановка этих значений
в предыдущее уравнение влечет
к = -те 1пA§)« 0.0035.
Следовательно, мы наконец решаем уравнение
150 = 375 - 325е(-°'0035^
для t = -pnB25/325)]/@,0035) « 105 (минут), общее время,
требуемое для приготовления жаркого. Поскольку жаркое было помещено
в духовку в 17:00, его нужно вынуть из нее примерно в 18:45. ■
1.4. Уравнения с разделяющимися переменными и приложения 75
Закон Торричелли
Предположим, что водный резервуар имеет отверстие в основании, через которое вытекает
вода. Пусть площадь отверстия равна а. Обозначим через y{t) глубину воды в резервуаре
в момент времени t, а через V (t) — объем воды в резервуаре. При некоторых идеальных
условиях скорость воды, вытекающей через отверстие, равна
v = y/2jjj), B1)
т.е. равна скорости, которую вытекающая вода приобрела бы при свободном падении
с поверхности воды до отверстия (см. задачу 35 из раздела 1.2). Эту формулу можно
получить, если сделать предположение, что сумма кинетической и потенциальной энергии
системы остается постоянной. При реальных условиях, принимая во внимание сжатие
воды в струе, вытекающей из отверстия, v — су/2ду, где с — эмпирическая константа
между 0 и 1 (обычно она равна приблизительно 0,6 для маленького непрерывного потока
воды). Для простоты мы принимаем с = 1 в следующем обсуждении.
Вследствие уравнения B1) мы имеем
> — = -еш = -а^Дду B2а)
^или, эквивалентно,
► -7Г = -ку/у, где к = ал/2д. B2Ь)
Это — закон Торричелли для жидкости, вытекающей из резервуара. Если А(у) обозначает
горизонтальную площадь поперечного сечения резервуара на высоте у выше отверстия,
метод вычисления объема через площади сечений дает
V
А{у) dy,
Jo
так что фундаментальная теорема анализа приводит к выводу, что dV/dy — А(у), и
поэтому
dV dV dy dy
~dT = liy- • л = A{y)Tf B3)
Из уравнений B2) и B3) мы наконец получаем
}dt
Это альтернативная форма закона Торричелли.
А{у) J = -а у/2д~у = -ку/у. B4)
Пример 8
Полусферическая чаша высотой (радиусом) 4 фута и в момент времени
t = 0 наполнена водой. В этот момент в основании резервуара
открывается круговое отверстие диаметром 1 дюйм. Через какое время из
резервуара вытечет вся вода?
76 Глава 1. Дифференциальные уравнения первого порядка
Решение Из прямоугольного треугольника на рис. 1.4.9 находим, что
А{у) = тгг2 = тг [16 - D - уJ] = фу - у2).
При д = 32 фт/с2 уравнение B4) принимает вид
J(8wx/2 - у3/2) dy = - J ^ Л;
W/2-hb/2 = -h^c,
Теперь 2/@) = 4, так что
С = — • 43/^2 — - • 45^2 = 448
Резервуар будет пуст, когда у — 0, т. е. когда
t = 72 -^-f «2150 (с);
Иными словами, приблизительно через 35 минут 50 секунд. Так что
потребуется немного меньше 36 минут, чтобы из резервуара вытекла
вся вода. ■
Положительное
направление оси у
Рис. 1.4.9. Вытекание жидкости из полусферического
резервуара
\Л. Задачи
Найдите общие решения (неявные, если необходимо, и явные, если это удобно) дифференццальных
уравнений в задачах 1-18. Штрихи обозначают производные по х.
а\
dx
l.|+2*y = 0
2- ^+2а;У2 = 0
1.4. Уравнения с разделяющимися переменными и приложения 77
. dy * ,-, \dy .
3. —=ysmx 4. A + x)-r- = Ay
dx dx
7. ^ = F4xj/I/3 8. ^ = 2xsec2/
flu!' Guv
9. (l-sa)g=2y 10. (l + a;Jg = (l+2/J
11. y' = xy3 12. «/у' = xB/2 + 1)
111 = ^*5 «.<*' +i)<«6!,>y' = *
17. у' = 1 + ж ■+- у 4- xy (Указание: разложите правую часть на множители.)
ю2/ 1 2i2 22
18. IJ/ = 1 — X +у — X у
Найдите явные частные решения задач Коши Хзадач с начальными условиями) в задачах 19-28.
19. ^ = уе", 2/@) = 2е
21. 2у^- = . Х , 2/E) = 2
dx y/x2-16 V '
23. 1 + 1 = 22/, 2/A) = !
2х22/, 2/A) = 1
2х~\ 2/@) = 0
29. (а) Найдите общее решение дифференциального уравнения dy/dx = у2. (Ь) Найдите особое
решение, которое не входит в общее решение, (с) Взгляните на эскиз типичных интегральных
кривых, чтобы определить точки (а, 6), в которых задача Коши (задача с начальными
условиями) у' = у2, у (а) = Ь имеет единственное решение.
30. Решите дифференциальное уравнение (dy/dxJ = Ay, чтобы убедиться, что на рис. 1.4.5
изображены общие интегральные кривые и особая интегральная кривая. Затем укажите все точки
(а, Ь) плоскости, в которых задача Коши (задача с начальными условиями) (у'J = Ау, у(а) = Ь
(а) не имеет ни одного решения, (Ь) имеет бесконечно много решений, которые определены
для всех х, (с) имеет конечное множество решений в некоторых окрестностях точки х = а.
31. Обсудите отличие между дифференциальными уравнениями (dy/dxJ = Ay и dy/dx = 2у/у.
Имеют ли они те же самые интегральные кривые? Почему да или почему нет? Определите
точки (а, Ь) на плоскости, в которых задача Коши (задача с начальными условиями) у' = 2у/у,
у (а) = Ъ (а) не имеет ни одного решения, (с) имеет единственное решение, (Ь) имеет бесконечно
много решений.
32. Найдите общее решение и какое-нибудь особое решение дифференциального уравнения
dy/dx = уу/у2 — 1. Определите точки (а, Ь) плоскости, в которых задача Коши (задача с
начальными условиями) у' = y\Jy2 — 1, у (а) = Ь (а) не имеет ни одного решения, (с) имеет
единственное решение, (Ь) имеет бесконечно много решений.
25.
27.
х—
dx
dy_ _
dx
-у
бе'
20.
22.
24.
26.
28.
^- = Зх2(у2 + 1), 2/@) = 1
^ = Ах3у - 2/, 2/A) = -3
(tgrr)di = 2/' *&*) = **
^. = 2ху2 + 3х2у2, 2/A) = "
2л/х — = cos2 2/, у(А) = 7г/4
78 Глава 1. Дифференциальные уравнения первого порядка
33. (Прирост населения.) Некоторый город имел население 25 000 человек в 1960 году, а в 1970 году
численность его населения достигла 30 000 человек. Предположите, что его численность
населения продолжит расти по экспоненте с постоянной скоростью. Какую численность населения
его городские власти могут ожидать в 2000 году?
34. (Прирост популяции.) В некоторой культуре бактерий, число бактерий увеличилось
шестикратно за 10 часов. Сколько времени потребуется для того, чтобы численность популяции
удвоилась?
35. (Радиоуглеродный метод определения возраста.) Углерод, извлеченный из древнего черепа,
содержал только одну шестую того количества углерода 14С, которое содержит углерод,
извлеченный из современной кости. Какого возраста череп?
36. (Радиоуглеродный метод определения возраста.) Углерод, взятый из образца, который как
подразумевается, относится ко временам Христа, содержит 4,6 х 1010 атомов 14С в грамме. Углерод,
извлеченный из современного аналогичного экземпляра, содержит 5,0 х 1010 атомов 14С в
грамме. Вычислите приблизительный возраст экземпляра. Каково ваше мнение относительно его
подлинности?
37. (Непрерывно начисляемые сложные проценты.) После рождения первого ребенка супружеская
пара депонировала 5000 долл. на счет, по которому банк платит 8% дохода, начисляемый
непрерывно. Выплачиваемый доход приплюсовывается к вкладу. Сколько долларов будет начислено
на счет на восемнадцатый- день рождения ребенка?
38. (Непрерывно начисляемые проценты.) Предположим, что вы обнаруживаете на вашем чердаке
просроченную в библиотеке книгу, за которую ваш дедушка был должен был заплатить штраф
30 центов 100 лет назад. Если бы просроченный штраф рос по экспоненте по 5%-ной ежегодной
норме, начисляемой непрерывно, сколько вы должны были бы заплатить, если бы вы возвратили
книгу сегодня?
39. (Выведение препарата.) Предположим, что этанинал натрия (pentobarbitol) используется для
обезболивания собаки. Состояние обезболивания у собак достигается, когда ее кровь содержит
по крайней мере 45 мг этанинала натрия на килограмм веса собаки. Предположим также, что
из крови собаки этанинал натрия выводится по экспоненте, с периодом полувыведения 5 часов.
Какую разовую дозу нужно ввести, чтобы обезболить 50-килограммовую собаку на 1 час?
40. Период полураспада радиоактивного кобальта — 5,27 лет. Предположим, что в результате
ядерной аварии уровень радиации кобальта в некотором регионе в 100 раз превысил уровень,
приемлемый для проживания человека. В течение какого времени регион будет не пригодным
для жилья? (Игнорируйте вероятное присутствие других радиоактивных изотопов.)
41. Предположим, что минерал, сформировавшийся в результате древнего катаклизма, — возможно,
при формировании Земли, первоначально содержал изотоп урана 238и (который имеет период
полураспада 4,51 х 109 лет), но не содержал никакого конечного продукта радиоактивного
распада 238U. Если сегодня отношение атомов 238U к атомам свинца в минерале равно 0,9, то
когда произошел катаклизм?
42. Некоторая лунная порода содержит равные количества атомов аргона и калия. Предположите,
что весь аргон — результат радиоактивного распада калия (его период полураспада равен около
1,28 х 109 лет) и что один из каждых девяти распадов атома калия дает атом аргона. Каков
возраст лунной породы, если его исчислять со времени, когда она содержала только калий?
43. Кувшин пахты установлен у парадного крыльца, причем температура кувшина первоначально
равна 25° С. Температура на крыльце равна 0°С. Предположим, что через 20 минут температура
пахты понизилась до 15° С. Когда она будет равна 5° С?
44. Когда сахар растворяется в воде, количество А, которое осталось нерастворенным после t
минут, удовлетворяет дифференциальному уравнению1 dA/dt = — к А (к > 0). Если 25% саха-
1.4. Уравнения с разделяющимися переменными и приложения 79
ра растворилось за 1 минуту, то сколько потребуется времени, чтобы растворилась половина
сахара?
45. Интенсивность света I на глубине х метров ниже поверхности озера удовлетворяет
дифференциальному уравнению dl/dx = (—1,4)/. (а) На какой глубине интенсивность равна половине
интенсивности /о на поверхности (где х = 0)? (Ь) Какова интенсивность на глубине Юм (какую
часть от /о составляет интенсивность на глубине 10 м)? (с) На какой глубине интенсивность
будет равна 1% от интенсивности на поверхности?
46. Атмосферное давление р (в дюймах ртутного столба) на высоте х миль выше уровня моря
удовлетворяет задаче Коши (задаче с начальными условиями) dp/dx = (—0,2)р, р@) = 29,92.
(а) Вычислите атмосферное давление на высоте 10000 футов и на высоте 30000 футов. (Ь) Без
специальной тренировки лишь немного людей могут выжить, когда давление упадет ниже
15 дюймов ртутного столба. На какой высоте это произойдет?
47. Однажды в городе с населением 100 000 человек начала распространяться сомнительная
информация о наличии фенилэтиламина в питьевой воде. В течение недели 10 000 человек услышали
этот слух. Предположите, что скорость увеличения числа тех, кто слышал этот слух,
пропорциональна количеству тех, кто еще не услышал его. Когда половина населения города узнает
этот слух?
48. Согласно одной космологической теории, при создании Вселенной в результате Большого
взрыва были равные количества двух изотопов урана 235U и 238U. В настоящее время на каждый
атом 235U приходится 137,7 атома 238U. Зная время полураспада изотопов урана 238U D,51 х
х 109 года) и 235U G,10 х 108 года), вычислите возраст вселенной.
49. Пирог вынимается из духовки при 210°F и ставится охлаждаться при комнатной температуре
70°F. Через 30 минут температура пирога равна 140°F. Когда она будет равна 100°F?
50. Количество атмосферных загрязнителей A(t) в некоторой горной долине возрастает по
экспоненте и утраивается через каждые 7,5 года.
(a) Пусть начальное количество равно 10 единицам загрязнителя. Напишите формулу для A(t),
даюшую количество (в единицах загрязнителя) загрязнителя через t лет.
(b) Какое количество загрязнителей (в единицах загрязнителя) будет в атмосфере долины через
5 лет?
(c) Предположим, в долине опасно жить, когда количество загрязнителей достигает 100 единиц
загрязнителя. Сколько для этого потребуется времени?
51. В результате аварии на атомной электростанции некоторый регион был загрязнен
радиоактивным веществом, которое распадается по экспоненциальному закону. Начальное количество
радиоактивного вещества1 равно 15 стронциевых единиц, а 5 месяцев спустя — все еще 10
стронциевых единиц. Предположим, что 1 стронциевая единица считается безопасным количеством
для проживания.
(a) Написать формулу, дающую количество A(t) радиоактивного вещества (в стронциевых
единицах) через t месяцев.
(b) Какое количество радиоактивного вещества останется через 8 месяцев?
(c) Через сколько месяцев останется А = 1 стронциевая единица, так что регион будет
безопасным для людей?
52. В настоящее время во всем мире насчитывается приблизительно 3300 различных человеческих
"языковых семейств". Предположите, что все они возникли из единственного первоначального
языка и что языковое семейство распадается на 1,5 языкового семейства каждые 6 тысяч лет.
Когда же был единственный первоначальный разговорный язык?
80 Глава 1. Дифференциальные уравнения первого порядка
53. Тысячи лет назад предки коренных американцев пересекли Берингов пролив из Азии и вошли
в западное полушарие. С тех пор они расселились в Северной и Южной Америке.
Единственный язык, на котором первоначально говорили коренные американцы, с тех пор распался
на многие индийские языковые семейства. Примите (как в задаче 52), что количество этих
семейств языка умножается на 1,5 каждые 6000 лет. Теперь насчитывается 150 языковых семейств
коренных американцев в западном полушарии. Когда первые предки сегодняшних коренных
американцев прибыли в Америку?
54. Резервуар имеет форму вертикального цилиндра, первоначально он заполнен водой на 9 футов;
из основания в момент времени t = 0 (часы) вынимается пробка. После 1 часа глубина воды
понизилась и стала равной 4 футам. Сколько потребуется времени, чтобы из резервуара вытекла
вся вода?
55. Предположим, что резервуар в задаче 54 имеет радиус 3 фута и что в его основании есть круглое
отверстие радиусом 1 дюйм. Сколько потребуется времени, чтобы из резервуара вытекла вся
вода, если первоначально глубина воды равна,9 футам?
56. В момент времени t = 0 из основания (в вершине конуса) полного конического водного
резервуара высотой 16 футов вынута пробка. После 1 часа глубина воды равна 9 футам. Когда
резервуар будет пуст?
57. Предположим, что цилиндрический резервуар, первоначально содержащий Vo галлонов воды,
сливается через отверстие в основании за Т минут. Используйте закон Торричелли, чтобы
показать, что объем воды в резервуаре после t ^ Т минут равен V = Vo [1 — (t/T)]2.
58. Водный резервуар имеет форму тела, полученного вращением кривой у = х4^3 вокруг оси у.
Пробка в основании вынимается в 12 часов полудня, когда глубина воды в резервуаре равна
12 футов. В 13:00 глубина воды равна 6 футам. Когда резервуар будет пуст?
59. Водный резервуар имеет форму тела, полученного вращением параболы х2 — Ъу вокруг оси у.
Глубина воды равна 4 футам в 12 часов полудня, когда вынимается круглая пробка в основании
резервуара. В 13:00 глубина воды равна 1 футу, (а) Найти глубину y(t) воды, остающейся после
t часов. (Ь) Когда резервуар будет пуст? (с) Предположим, что начальный радиус (верхний)
поверхности воды равен 2 футам. Каков радиусом кругового отверстия в основании?
60. Цилиндрический резервуар длиной 5 футов и радиусом 3 фута расположен так, что его ось
горизонтальна. Предположим, что круговое отверстие в основании с радиусом 1 дюйм
открыто и резервуар первоначально заполнен наполовину ксилолом. Сколько времени потребуется,
чтобы жидкость вытекла полностью?
61. Сферический резервуар радиусом 4 фута полон бензина, когда в основании! открывается круглое
отверстие радиусом 1 дюйм. Сколько времени потребуется, чтобы из резервуара вытек весь
бензин?
62. Предположим, что первоначально полный полусферический водный резервуар радиуса 1 м
поставлен на свое плоское дно. Он имеет в основании отверстие радиуса 1 см. Если это отверстие
основания открыть в 13:00, когда резервуар будет пуст?
63. Рассмотрим первоначально полный полусферический водный резервуар из примера 8, но пусть
теперь радиус г его кругового отверстия основания неизвестен. В 13:00 в основании
открывается отверстие, и в 13:30 глубина воды в резервуаре равна 2 футам, (а) Используйте закон
Торричелли в форме dV/dt = — @,6Oгг2у/2ду (принимается во внимание сжатие), чтобы
определить, когда резервуар будет пуст. (Ь) Каков радиус отверстия в основании?
64. (Клепсидра, или водные часы.) Нужно сконструировать (разработать) 12-часовые водные часы,
имеющие измерения, показанные на рис. 1.4.10. Они должны иметь форму, подобную
поверхности, полученной вращением кривой у = f(x) вокруг оси у. Какова должна быть эта кривая?
Каков должен быть радиус кругового отверстия в основании, чтобы уровень воды падал с
постоянной скоростью 4 дюйма в час?
1.4. Уравнения с разделяющимися переменными и приложения
81
вода
Рис. 1.4.10. Клепсидра
65. Как раз перед полуднем безжизненное тело жертвы убийства было найдено в комнате с
постоянной температурой 70° F. В 12 полудня температура тела была равна 80° F, а в 13:00 — 75° F.
Предположите, что температура тела во время смерти была 98,6° F и что оно охлаждалось
в соответствии с законом Ньютона. Когда произошло убийство?
66. Однажды рано утром начался снегопад, причем количество выпадаемого снега росло с
постоянной скоростью. В 7 утра снегоочиститель начал чистить дорогу. В 8 утра он очистил 2 мили,
но снегоочистителю требовалось еще два часа (до 10 утра), чтобы пройти оставшиеся 2 мили,
(а) Пусть t = 0 в момент, когда начался снегопад; через х обозначим расстояние, которое
прошел снегоочиститель в момент времени t. Примем также предположение, что снегоочиститель
очищает снег с постоянной скоростью (т. е. определенное количество кубических футов снега
в час, например). Покажите, что
dx _ 1
~di ~ 1
где к — константа. (Ь) Когда начал идти снег? (Ответ: в 6 утра.)
67. Снегоочиститель отправляется в 7 утра, как в задаче 66. Предположим теперь, что в 8 утра он
прошел 4 мили и что в 9 утра очистил еще 3 мили. Когда начал идти снег? Это более трудная
задача для снегоочистителя, потому что теперь, чтобы найти значение к, должно быть решено
трансцендентное уравнение в числовой форме. (Ответ: в 4:27 утра.)
68. На рис. 1.4.11 показана бусинка, соскальзывающая без трения от точки Р до точки Q. В задаче
о брахистохроне спрашивается, какой формы должен быть провод, чтобы время соскальзывания
бусинки (время спуска от Р до Q) было минимальным. В июне 1696 Года Иоганн Бернулли
предложил научному сообществу решить эту задачу в течение не более чем 6 месяцев (позже
этот срок был продлен до Пасхи 1697 года по просьбе Готфрида Лейбница). Исаак Ньютон,
в то время уже оставивший академические занятия и занявший должность директора Монетного
двора в Лондоне, получил вызов Бернулли 29 января 1697 года. Сразу же на следующий день он
сообщил свое собственное.решение Королевскому Обществу в Лондоне: кривая минимального
времени спуска — это перевернутая дуга циклоиды. Чтобы получить современный вывод этого
результата, предположите, что бусинка начинает соскальзывать с состояния покоя в начале
координат Р и пусть у = у(х)— уравнение искомой кривой в системе координат, ось у. которой
направлена вниз. Тогда механический аналог закона Снеллиуса, часто применяемого в оптике,
82 Глава 1. Дифференциальные уравнения первого порядка
Рис. 1.4.11. Бусинка, соскальзывающая
с провода — задача о брахистохроне
даст, что
sin a
= const, (i)
и
где а обозначает угол отклонения (от вертикальной линии) касательной к направляющей
кривой, так что ctga = у'{х) (почему?) и v = \/2ду — скорость бусинки, когда она
спустилась на расстояние у по вертикали (поскольку Кинетическая энергия = \rriv1 = тду =
= —Потенциальной энергии).
(а) Сначала из уравнения (i) выведите дифференциальное уравнение
ф ___ /2а - у
dx~~y
где а — подходящая положительная константа.
dx у У
ожительная
(Ь) Подставьте у == 2а sin21, dy = 4а sin t cos t dt в (ii), чтобы получить решение
(ii)
x = aBt — sin 2t), у = a(l — cos 2t), (iii)
для которого t = у = 0, когда а; = 0. Наконец, подстановка в = 2а в (iii) дает стандартное
параметрическое уравнение а; = а(в — sin#), у = a(l — cos#) циклоиды, которая является
траекторией точки на ободе кругового колеса радиуса а, когда оно катится по оси х. [См.
пример 5 в разделе 10.4 учебника анализа Edwards and Penney, Calculus, 6th ed. (Upper
Saddle River, NJ: Prentice Hall, 2002).]
69. Предположим, что однородный гибкий кабель зажат в двух точках (±L,H)9 находящихся
на равных высотах, причем эти точки расположены симметрично по обеим сторонам оси у
(рис. 1.4.12). С помощью законов физики можно показать, что форма у = у(х) зависшего
кабеля удовлетворяет дифференциальному уравнению
•3-"+
\dx) '
где константа а = Т/р — отношение натяжения Т кабеля в его самой низкой точке х = 0
(где у'@) = 0) и его (постоянной) линейной плотности р. Если мы подставим v = dy/dxf
dv/dx = d2y/dx2 в это дифференциальное уравнение второго порядка, мы получим уравнение
первого порядка
а— = y/l + v2.
ах
1.4. Уравнения с разделяющимися переменными W приложения 83
(-L.H)
Рис. 1.4.12. Цепная линия
Решите это дифференциальное уравнение относительно у'(х) = v(x) = sinh(x/a). Затем
проинтегрируйте его, чтобы получить функцию
у(х) = a cosh ( — J -f С,
описывающую форму провисшего кабеля. Эту кривую называют цепной линией, потому что
именно по ней провисает тяжелая цепь,
1.4. Приложение. Логистическое уравнение
Как и в уравнении C) из этого раздела, решение дифференциального уравнения с
разделяющимися переменными приводит к вычислению двух неопределенных интегралов.
Это соблазняет использовать систему компьютерной алгебры для этой цели. Мы
иллюстрируем этот подход на примере логистического дифференциального уравнения
dx
~di
= ах — Ьх ,
со
которое моделирует численность населения x(t) с количеством рождений (в единицу
времени), пропорциональным х9 и количеством смертных случаев, пропорциональным х2.
Здесь мы сконцентрируемся на решении уравнения A) и отложим обсуждение
приложений прироста населения до раздела 2.1.
Например, если a = 0,01 и Ь = 0,0001, уравнение A) принимает вид
(It x
^ = @,01)*- @,0001)** = —A00-*).
Разделение переменных приводит к
J жA00 - х) dX = J 100C
■dt
t
+ С.
10000 10000
Мы можем вычислить интеграл слева, используя команду Maple
int(l/(x*A00 - х)), х);
команду системы Mathematica
Integrate[ l/(x*A00 - х)), х ]
B)
C)
84 Глава 1. Дифференциальные уравнения первого порядка
или команду Matlab
syms x; intA/(х*A00 - х)))
Любая система компьютерной алгебры дает результат вида
т-i- In ж - ^— Ых - 100) = —£—
100 100 v ; 10000
+ С
D)
эквивалентный результату графического калькулятора, показанному на рис. 1.4.13.
Вы можете теперь использовать начальное условие х@) = хо, объединить логарифмы
и, наконец, выполнить потенцироваие, после чего решить уравнение D) и найти частное
решение
x(t)
lOOzoe'/100
100 - xQ + х0е*/100
E)
уравнения B). Поле направлений и интегральные кривые показаны на рис. 1.4.14. Из
рисунка видно, что независимо от начального значения х0, решение x(t) приближается
к 100 при t —► -boo. Вы можете с помощью уравнения E) проверить эту догадку?
200 400 600 800
t
1000
Рис. 1.4.13. На экране TI-89
показан интеграл уравнения C)
Рис. 1.4.14. Поле направлений
и интегральные кривые
уравнения х1 = @,01)ж - @,0001)ж2
Исследование. Исследуйте частный случай логистического уравнения A), в котором
а — т/п и Ъ = 1/п, причем тип пусть будут наибольшими двумя различными цифрами
(в любом порядке) в вашем номере студенческого билета.
(a) Сначала начертите поле направлений для полученного дифференциального
уравнения, причем изобразите достаточное количество интегральных кривых, чтобы
увидеть то, что случится с населением при t —► +оо. Сформулируйте ваш вывод
явно.
(b) Затем используйте систему компьютерной алгебры, чтобы решить
дифференциальное уравнение символически, а потом используйте символическое решение,
чтобы найти предел x(t) при t —> -boo. Был ли правильным ваш вывод,
основанный на графиках?
1.5. Линейные уравнения первого порядка 85
(с) Наконец, поставьте и решите числовую задачу, используя символическое решение.
Например, сколько времени потребуется, чтобы х возросло от заданного
начального значения х0 до заданного значения х\1
1.5. Линейные уравнения первого порядка
В разделе 1.4 мы научилось решать дифференциальное уравнение с разделяющимися
переменными, интегрируя его после умножения обеих частей на подходящий множитель.
Например, чтобы решить уравнение
^ = 2ху (у>0), A)
мы умножаем его обе части на множитель 1/у, чтобы получить
-•^ = 2я; Т.е. Dx(\ny) = Dx(x2). B)
Поскольку каждая часть уравнения B) рассматривается как производная (по
независимой переменной х), все, что\)стается, — два простых интегрирования, которые приводят
к уравнению \пу = х2 + С. По этой причине функция р(у) — 1/у называется
интегрирующим множителем для первоначального уравнения A). Интегрирующий множитель
дифференциального уравнения — это функция р(х, у), такая что умножение каждой части
дифференциального уравнения на р(х, у) приводит к уравнению, в котором каждая часть
может рассматриваться как производная.
Умножая обе части уравнения на подходящий интегрирующий множитель, можно
стандартным методом решать линейные уравнения первого порядка
> ^L+Pix)p = Qix) {ъ)
на интервале, на котором непрерывны коэффициенты (функции) Р(х) и Q(x). Мы
умножаем каждую часть в уравнении C) на интегрирующий множитель
> p(x) = e!pWdx. D)
Результат —
Ау
Поскольку
eSpWdx^ + P(x)e!pWdxy = Q(x)eSpMdx. E)
Ас
JP(X)
dx
Р(х),
левая часть — производная произведения у(х) • е$ р^ dx, так что уравнение E)
эквивалентно
Dx [у(х) • е! р^ dx] = Q(x)eS p^ dx.
86 Глава 1. Дифференциальные уравнения первого порядка
Интегрирование обеих частей этого уравнения дает
y(x)e!p^dx = [ (Q{x)e$p^dx) dx + C.
Наконец, решая это уравнение относительно у, получаем общее решение линейного
уравнения первого порядка C):
у{х) = е" J" pW dx Г f (Q(xyeS PW dx^ dx + c
F)
Эту формулу не нужно запоминать. В конкретной задаче вообще проще использовать
метод, которым мы вывели формулу. Иными словами, чтобы решить уравнение, которое
может быть записано в форме уравнения C) с коэффициентами (функциями) Р(х) и Q(x),
заданными явно, нужно попытаться выполнить следующие шаги.
МЕТОД: РЕШЕНИЕ УРАВНЕНИЙ ПЕРВОГО ПОРЯДКА
1. Сначала вычислить интегрирующий множитель р(х) = e-f p(x)dx.
2. Затем умножить обе части дифференциального уравнения на р(х).
3. Затем левую часть получившегося уравнения рассмотреть как производную
произведения:
Dx [p(x)y(x)] = p(x)Q(x).
4. Наконец, проинтегрировать полученное уравнение
р{х)у{х) = p{x)Q(x) dx + С,
а затем решить его относительно у, чтобы получить общее решение
первоначального дифференциального уравнения.
Замечание 1. Учитывая начальное условие у(хо) = уо, можно обычно подставить
х = хо и у = г/о в общее решение и решить его относительно значения С, что даст
частное решение, которое удовлетворяет этому начальному условию.
Замечание 2. Вы не обязаны указывать явно постоянную интегрирования, когда
находите интегрирующий множитель р(х). Ведь если в равенстве D) мы заменим
Р(х) dx на J P(x) dx + К,
то в результате получится
р(а.) = eK+jP(x)dx = eKeSP(x)dXt
Но постоянный множитель ек не влияет существенно на результат умножения обеих
частей дифференциального уравнения на р(ж), так что мы могли бы также взять К = 0. Вы
можете поэтому выбрать для $ Р{х) dx любую удобную примитивную Р(х)9 не беспокоясь
о прибавлении постоянной интегрирования. ■
1.5. Линейные уравнения первого порядка 87
Пример 1
Решим задачу Коши (задачу с начальными условиями)
Решение Здесь мы имеем Р{х) = — 1 и Q(x) = ^е~ж/3, так что интегрирующий
множитель
p(x)~eU-Vdx = e-x.
Умножение обеих частей данного уравнения на е х влечет
_е-х^/-_е-Яу=Пе-4»/3> (?)
что мы рассматриваем как
— (e~xv) = lie-41/3
dx Уе у) se •
Следовательно, интегрирование по х дает
•у = f ^e~4x/3 dx = -§е~4ж/3 + С,
и умножение на ех дает общее решение
у(х) = Сех - Ще~*'\ (8)
Подстановка х = 0иу = -1 теперь дает С = ^, так что искомое
частное решение представляет собой функцию
»(*) = &* ~ Ш*-Х/3 = &(*"- 33в"ж/3) • ■
Замечание. На рис. 1.5.1 показано поле направлений и типичные интегральные
кривые уравнения G), включая и ту, которая проходит через точку @,-1). Обратите
внимание, что некоторые решения растут быстро в положительном направлении (т. е. при
увеличении х), в то время как другие растут быстро в отрицательном направлении.
Поведение данной интегральной кривой определено начальным условием у@) = уо. Два
типа поведения отделены частным решением у(х) = —Ще~х/3, которое получается из
равенства (8), если в нем положить С = 0. Поэтому для интегральной кривой, которая
выделена штриховой линией на рис. 1.5.1, уо = — §§. Если г/о > — §§, то С > 0 в
уравнении (8), так что член ех в конечном счете определяет поведение у (х) и, следовательно,
у{х) —> +оо при х —* +оо. Но если уо < — §§> то С < О, так что оба слагаемых в у(х)
отрицательны, и поэтому у(х) —» —оо при х —► +оо. Таким образом, начальное условие
Уо = ~Ш является критическим в том смысле, что решения, начало которых лежит выше
-Щ на оси у, растут в положительном направлении, а решения, начало которых лежит
ниже —1|, растут в отрицательном направлении при #»-^+ +оо. Интерпретация
математической модели часто зависит от обнаружения такого критического условия, которое
отделяет один вид поведения решения от другого вида поведения. ■
88
Глава 1. Диффэр@нциаш»иуьш уравнения первого порядка
@,-1)
з> = -^ехР(-*/з)
2
1
0
^ -1
-2
-3
. N N N Ч \
N \ \ \\\, \ \ \ \
^ \ \\ \\\^\\\\\
\ \ \\ \ \ \ \ \ \ \ \
\ \К \ \ \ ^ \ \ \ \\ \ \ \
\ \ \ \\ \ \ \ \\\ \ \
\\ \ \ \\\ \ \ \ \ \ \
-1 0 1
2 3 4 5
х
Рис. 1.5.1. Поле направлений и интегральные кривые
уравнения у' — у + Ц-е~х^
Пример 2
Найдем общее решение уравнения
,dy
(х2 + 1)-~ + Зху = 6х.
ах
(9)
Решение После деления обеих частей уравнения на х2 + 1 мы рассматриваем
результат
dy Зх 6х
dx~ + х2 + 1У = х2 + 1
как линейное уравнение первого порядка с коэффициентами Р(х) =
= 3xj (х2 + 1) и Q(x) = 6х/(х2 + 1). Умножение на
р(х) = exp Q -^L- dx) = ехр (| 1п(х2 + 1)) = (х2 + 1K^
дает
{х2 + 1K/2^ + щх2 + Х)Х,2 = 6ф2 + 1}1/2
ах
и, таким образом,
Dx [(х2 + lf'2y\ = 6х(х2 + II/2.
Интегрирование влечет
(х2 + lK/2^/ = [ 6х(х2 + II'2 dx = 2(x2 + IK/2 + С.
Умножение обеих частей на (ж2 + I)-3/2 дает общее решение
у(х) = 2 + С(х2 + 1Г3/2. A0)
1.5. Линейные уравнения первого порядка 89
Замечание. На рис. 1.5.2 показано поле направлений и типичные интегральные
кривые уравнения (9). Обратите внимание на то, что при х —» +оо все другие интегральные
кривые приближаются к горизонтальной интегральной кривой (графику постоянной
функции) у(х) = 2, которой соответствует С = 0 в уравнении A0). Это постоянное решение
может быть описано как равновесное решение дифференциального уравнения, потому что
у@) = 2 подразумевает, что у(х) = 2 для всех х (и таким образом значение решения
не изменяется, т. е. не зависит от выбора начального значения). ■
71
6
5
4
3
^ 2
1
0
-1
-2
-3|
-5-4-3-2-1 0 12 3 4 5
х
Рис. 1.5.2. Поле направлений и интегральные кривые
дифференциального уравнения (9)
Более пристальный взгляд на метод разделения переменных
На предыдущее решение уравнения линейного уравнения первого порядка у' + Ру =
= Q, выраженное формулой F), стоит взглянуть более пристально. Предположим, что
коэффициенты-функции Р(х) и Q(x) непрерывны (хотя, возможно,"и неограничены) на
открытом интервале I. Тогда примитивные
/ / 1 1 1 1 1 1 1 / \ 1 \ \ \ \ \ \ \ \
-///////// Шг \ t \ \ \ \ \ \ \Н
///////// / \ \ \ \ \ \ \ \ \ \
г/ ////it I /#/m\ v \ \ \ \ \ \ \Н
//////// ///К\\ \ \ \ \ \ \ \ \ !
-////// 1 1 1 /К \\\\\\\\ч~]
у у у / / / / ////у"К^v N N ч ч ч ч чJ
\~у у у у у у /^-^*Т^Лч\> N ч v. v. ^ -чП
|_> ^ ^ V V \ ^XV4s
Ч Ч N N \ \ \ Л\\
L\ \ \ \ \ \ \ \ \\\
\ \ \ \ \ \ \ \ \ \
L\ \ \ \ \ \ \ \ \ Vs
1 \ \ \ \ \ \ \ \ \ \
dfyifs у у у у у у_
У//// / / / / У У У
/ А, Л/ А / Л у 1
///////////
JJ1 1 1 1 1 1 / / /_
//////////
6. 1 1 1 1 1 I 1 1 /-
I 1 1 1 1 1 1 1 1 1
[p(x)dx и U Q(x)eS **&**}
dx
существуют на /. Наш вывод уравнения F) показывает, что если у = у(х) — решение
уравнения C) на /, то у(х) дается формулой F) при некотором значении константы С.
Наоборот, можно проверить непосредственной заменой (задача 31), что функция у(х),
определенная равенством F), удовлетворяет уравнению C). Наконец, для заданной точки xq
интервала / и любого числа уо существует (это отмечалось ранее) единственное значение С
такое, что у(хо) = уо. Следовательно, мы доказали следующую теорему существования
и единственности решения.
Теорема 1
Линейное уравнение первого порядка
Если функции Р(х) и Q(x) непрерывны на открытом интервале /, содержащем точку хо,
то задача Коши (задача с начальными условиями)
£ + P(x)y = Q(x), y(x0)
Уо
(П)
имеет единственное решение у(х) на /, даваемое равенством F) при соответствующем
значении С. А
90 Глава 1. Дифференциальные уравнения первого порядка
Замечание 1. Теорема 1 дает решение линейного дифференциального уравнения на
всем интервале / в отличие от теоремы 1 из раздела 1.3, которая гарантирует существование
решения только на некотором, возможно меньшем, интервале.
Замечание 2. Теорема 1 утверждает, что каждое решение уравнения C) входит в
общее решение, даваемое равенством F). Таким образом, линейное дифференциальное
уравнение первого порядка не имеет никаких особых решений.
Замечание 3. Соответствующее значение константы С в равенстве F) при
необходимости реЩить задачу Коши (задачу с начальными условиями) в равенстве F) можно
выбрать "автоматически", достаточно написать
р(х)=ехрП P(t)dt\
A2)
Указав пределы интегрирования хо и х9 мы производим такой выбор констант в
неопределенных интегралах в равенстве F), который гарантирует, что р(хо) = 1 и что у(хо) = уо (вы
можете проверить это непосредственно, подставляя х = xq в равенство A2)). ■
Пример 3
Решим задачу Коши (задачу с начальными условиями)
2 dy
xz— +xy = sin х, 2/A) = г/о-
A3)
Решение Деление на х2 дает линейное уравнение первого порядка
dy 1 _ sin x
dx x x2
с коэффициентами Р(х) = 1/х и Q(x) = (smx)/x2. При xq = 1
интегрирующий множитель, даваемый равенством A2), равен
р(х) = ехр I — dt 1 = ехрAп х) = #,
так что искомое частное решение дается формулой
у(х) = -
Уо +
РН
A4)
В соответствии с теоремой 1, это решение определено на целой
положительной полуоси х. ■
Комментарий. Чтобы найти значение решения у(х) для заданного значения ж,
интеграл того типа, который входит в равенство A4), для заданного значения х иногда
приходится приближать с помощью численных методов, например с помощью формулы Симпсона.
В данном случае, однако, мы имеем функцию интегрального синуса
«•/ ч Г sin*
dt,
1.5. Линейные уравнения первого порядка 91
которая появляется в приложениях настолько часто, что ее значения приведены в
таблицах. Хороший набор таблиц специальных функций имеется в справочнике по специальным
функциям М. Абрамовича и И. Стиган; Abramowitz and Stegun, Handbook of Mathematical
Functions (New York: Dover, 1965K. Затем частное решение из равенства A4) приводит к
= I[yo + Si(x)-Si(l)]. A5)
Функция интегрального синуса доступна во многих научных вычислительных системах
и может использоваться для вычерчивания типичных интегральных кривых, определенных
уравнением A5). На рис. 1.5.3 показаны отдельные интегральные кривые с начальными
значениями уA) = уо для значений уо от уо = —3 до уо — 3. Из рисунка видно, что на
каждой интегральной кривой у{х) —► О при х —► -foo, на самом деле так и есть, потому что
функция "интегральный синус" ограничена. ■
з
2
1
^ О
-1
-2
-3
О 5 10 15 20
х
Рис. 1.5.3. Типичные интегральные кривые,
определенные уравнением A5)
Далее мы увидим, что случай, когда решение дифференциального уравнения может
быть выражено в элементарных функциях — это исключение, а не правило. Мы изучим
различные методы, позволяющие получить хорошие аппроксимации к значениям некоторых
часто встречающихся неэлементарных функций. В главе 2 мы несколько подробнее обсудим
численное интегрирование дифференциальных уравнений.
Задачи на смеси
Как первое приложение линейных уравнений первого порядка, мы рассматриваем
резервуар, содержащий раствор — смесь растворенного вещества и растворителя, — например
раствор соли в воде. Есть приток и отток растворенного вещества, и мы хотим вычислить
количество x{t) растворенного вещества в резервуаре в момент времени £, зная количество
ж@) = хо в момент времени t = 0. Предположим, что раствор с концентрацией а граммов
растворенного вещества в литре раствора вливается в резервуар с постоянной скоростью г*
литров секунду и что раствор в резервуаре сразу же тщательно перемешивается, причем
отток имеет постоянную скорость г0 литров в секунду.
3 Есть перевод на русский язык: Справочник по специальным функциям под редакцией М. Абрамовича и И.
Стиган. — М: Наука, 1979. — Примеч. ред.
, ч 1 Г Г sin* , Г sin* '
y{x) = x[yo + \0—dt-\0~d\
4A,3)' ■
1A,-3)
Ш 1 1
1 1 1 1 1
1 1
92 Глава 1. Дифференциальные уравнения первого порядка
Чтобы написать дифференциальное уравнение для x(t), мы вычислим изменение Ах
количества х в течение краткого временного интервала [£, t + At]. Количество раствора,
который вливается в резервуар в течение At секунд равно riCi At граммов. Чтобы проверить
это, обратите внимание на размерность полученного нами результата: выражение
литр
КСг ] (At секунда)
литр /
секунда,
дает количество, выраженное в граммах.
Количество раствора, который вытекает из резервуара в течение этого же самого
временного интервала, зависит от концентрации с0 (t) растворенного вещества в растворе в момент
времени t. Но, как показано на рис. 1.5.4, c0(t) = x(t)/V(t)9 где V(t) обозначает объем
(является константой только если г г = г0) раствора в резервуаре в момент времени t. Тогда
Ах = {грамм вливаемого растворенного вещества} —
— {грамм выливаемого растворенного вещества} «
ttnciAt -r0c0At.
Теперь делим на At:
Ах ^
д , ^ ^»Сг Т0С0.
Наконец, берем предел при At —> 0; если все имеющиеся здесь функции непрерывны и x(i)
дифференцируема, то ошибка в этой аппроксимации также приближается к нулю, и мы
получаем дифференциальное уравнение
> -77 = Г*С* - rocoi A6)
в котором гi, Ci и г0 являются константами, а с0 обозначает переменную концентрацию
сМ = 1% A7)
растворенного вещества в резервуаре в момент времени t. Таким образом, количество
растворенного вещества в резервуаре x(t) удовлетворяет дифференциальному уравнению
А = ПС' ~ VX- A8)
^-Г\ Вливается: r\ L/s, c/g/L
I Количество x(f)
[ ОбъемГ@
Концентрация c0(i)=-
__^_____^nj Выливается:
I ro L/s,
c0 g/L
Рис, 1,5.4, Задача на смесь
в единственном резервуаре
1.5. Линейные уравнения первого порядка 93
Если Vb = V@)9ToV(t) = Vo + (n — г0)£,такчто уравнение A8) — линейное
дифференциальное уравнение первого порядка для количества х (t) растворенного вещества в резервуаре
в момент времени t.
Важно. Уравнение A8) не нужно запоминать. Нужно стремиться понять именно метод
вывода этого уравнения поведения системы в короткий временной интервал [t,t + At],
потому что именно этот метод позволяет вывести дифференциальные уравнения всех видов.
Замечание. При получении уравнения A8) было удобно использовать указанные нами
единицы массы и объема. Но для измерения количества растворенного вещества и объема
раствора может использоваться и любая другая совместимая система единиц. В следующем
примере мы измеряем обе эти величины в кубических километрах. ■
Пример 4
Предположим, что озеро Эри имеет объем 480 км3 и что скорость притока
в него (из озера Гурон) и оттока из него (в озеро Онтарио) равна 350 км3
в год. Предположим, что в момент времени t = 0 (годы), концентрация
загрязнителя в озере Эри вызвана прошлым промышленным
загрязнением, которому теперь приказали прекратиться (а оно*взяло да и
послушалось!), в пять раз больше, чем концентрация загрязнителя в озере Гурон.
Предположим, что при оттоке вода в озере тщательно перемешивается.
Сколько потребуется времени, чтобы концентрация загрязнителя в озере
Эри вдвое превышала концентрацию загрязнителя в озере Гурон?
Решение Здесь мы имеем
V = 480 (км3),
П = г о = г = 350(км3/год),
Сг = с (концентрация загрязнителя в озере) и
хо = х@) = 5cV,
а вопрос формулируется так: когда x(t) = 2cVl В этих обозначениях
уравнение A8) представляет собой уравнение с разделяющимися
переменными
A9)
которое мы переписываем в виде линейного уравнения первого порядка
dx
dx
—
dt
= re —
г
— X
V
dt
+ px
B0)
с постоянными коэффициентами р = r/V9 q = re; его интегрирующий
множитель равен р ~ ept. Вы можете решить это уравнение непосред-
94
Глава 1. Дифференциальные уравнения первого порядка
ственно или применить формулу A2). Последняя дает
x{t) = e~pt [во + f qept dt\ = e~pt [x0 + - (ept - l)
x(t) = cV + 4cVe~rt/v. B1)
Поэтому, чтобы найти, когда x(t) =^ 2cV, мы должны только решить
уравнение
cV + 4cVe~rt/v = 2cV, откуда
t=—In4=—-In4« 1,901 (года). ■
г 350
Пример 5
120-галлонный резервуар первоначально содержит 90 фунтов соли,
растворенной в 90 галлонах воды. Морская вода, содержащая 2 фунта
соли в галлоне, вливается в резервуар со скоростью 4 галлона в минуту,
а тщательно перемешанная смесь вытекает из резервуара со скоростью
3 галлона в минуту. Сколько соли содержит заполненный резервуар?
Решение Интересная особенность этого примера — из-за различия в скоростях
притока и оттока объем морской воды в резервуаре увеличивается
равномерно, причем V(t) = 90 4-1 галлонов. Изменение Ах количества соли х
в резервуаре с момента времени t к моменту времени t+Д t (минут) дается
формулой
ША<-
Ах at D)B)Д* - 3
так что наше дифференциальное уравнение имеет вид
8.
dx 3
Интегрирующий множитель равен
р(х) = exp Q ^ *) = e3"W> = (90 + tf,
что дает
A[(90 + tKx] =8(90 +1K;
(90 + tfx = 2(90 + tf + С.
Условиеж(О) = ЭОдаетС = —(90L,такчтоколичествосоливрезервуаре
в момент времени t равно
904
x(t) = 2(90 +t)
(90 + tf'
1.5. Линейные уравнения первого порядка 95
Резервуар заполнится через 30 минут, а когда t = 30, мы имеем
904
хC0) = 2(90 + 30) - —з w 202 (ФУ1™^
соли в резервуаре.
L5. Задачи
Найдите общие решения дифференциальных уравнений в задачах 1-25. Если задано начальное
условие, найдите соответствующее частное решение. Повсюду штрихи обозначают производные
по х.
1. i/ + y = 2,y@) = 0 2. у' - 2у = Зе2аг, 2/@) = 0
3. у' + Зу = 2хе_3х 4. у' - 2ху = ех*
5. ху' + 2у = Зх, уA) = 5 6. ху' + Ъу = 7х2, 2/B) = 5
7. 2xt/' + 2/ = lO^/i 8. 3x2/' + у = 12х
9. ху' -у = х, уA) = 7 10. 2x2/' - Зу = 9х3
И. xt/ + 2/ = 3x2/, 2/A) = 0 12. ху' + Зу = 2х5,2/B) = 1
13. 2/' + У = еж, 2/@) = 1 14. ху' - Зу = х3,2/A) = 10
15. у' + 2x2/ = ж, 2/@) = -2 16. у' = A - у) cos х, у(тг) = 2
17. A + х)у' + 2/ = cos х, 2/@) = 1 18. ху' = 2у + х3 cos x
19. у' + 2/ cot х = cos x 20. 2/' = 1 4- х -f t/ H- X2/, 2/@) = 0
21. ху' = Зу + х4 cosx, 2/B7г) = 0 22. г/ = 2ху + Зх2 ехр(х2), г/@) = 5
23. ху' + Bх - 3J/ = 4х4 24. (х2 + А)у' + Зху = х, 2/@) = 1
25. (х2 + l)g + Зх32/ = бхехр (-|х2), 2/@) = 1
Решите дифференциальные уравнения в задачах 26-28 относительно у, рассматривая ее (а не х)
в качестве независимой переменной.
26. A - W)% = У3 27. (х + уеУ)^ = 1
28. A + 2x2/)^ = 1+2/2
29. Выразите общее решение dy/dx = 1 + 2x2/ через интеграл (вероятности) ошибок
rf (х) = 4= Г е~*2 dt-
V^r Jo
30. Выразите решение задачи Коши (задачи с начальными условиями)
2х~- = 2/ + 2xcosx, 2/A) = 0
ах
через интеграл, т. е. так, как в примере 3 из этого раздела.
11. (а) Покажите, что
yc(x) = Ce-Sp(x)dx
является общим решением уравнения dy/dx + Р(х)у = 0. (Ь) Покажите, что
уР(х) = eSpW<* [J (QtoeJ™*) «fcj
96 Глава 1. Дифференциальные уравнения первого порядка
является частным решением уравнения dy/dx+Р(х)у = Q(x). (с) Предположим, что ус(х) —
любое общее решение уравнения dy/dx 4- Р{х)у = 0 и что уР(х) является произвольным
частным решением уравнения dy/dx + Р(х)у = Q(x). Покажите, что у{х) = ус(х) + уР(х) —
общее решение уравнения dy/dx + Р(х)у = Q(x).
32. (а) Найдите константы АиВ такие, что ур(х) = A sin x+B cos ж является решением уравнения
dy/dx + у = 2sinx. (b) Используя результат части (а) и метод задачи 31, найдите общее
решение уравнения dy/dx + у = 2 sin x. (с) Решите задачу Коши (задачу с начальными
условиями) dy/dx + у = 2 sin x, у@) = 1.
33. Резервуар содержит 1000 литров водного раствора 100 кг соли. Чистая вода накачивается
в резервуар со скоростью 5 литров в секунду, равномерно перемешивается и откачивается
с той же самой скоростью. Сколько времени потребуется, чтобы в резервуаре осталось только
10 кг соли?
34. Рассмотрим бассейн объемом 8 миллиардов кубически* футов, в котором начальная
концентрация загрязнителя равна 0,25%. Есть ежедневный приток 500 миллионов кубических футов
воды с концентрацией загрязнителя 0,05% и равный ежедневный отток хорошо перемешанной
воды в бассейне. Сколько времени потребуется, чтобы в резервуаре концентрация загрязнителя
снизилась до 0,10%?
35. Решите заново пример 4 для озера Онтарио. Единственное отличие заключается в том, что это
озеро имеет объем 1640 км3, а скорость оттока и притока равна 410 км3 в год.
36. Резервуар первоначально содержит 60 галлонов чистой воды. Морская вода, содержащая 1 фунт
соли в галлоне, вливается в резервуар со скоростью 2 галлона в минуту, полученный
(тщательно перемешанный) раствор вытекает из резервуара со скоростью 3 галлона в минуту; таким
образом, резервуар будет пуст ровно через 1 час. (а) Найдите количество соли в резервуаре
после t минут. (Ь) Каково максимальное количество соли в резервуаре?
37. Резервуар объемом 400 галлонов первоначально содержит 100 галлонов морской воды,
содержащей 50 фунтов соли. Морская вода, содержащая 1 фунт соли в галлоне, вливается в резервуар
со скоростью 5 галлонов в секунду, хорошо перемешанный рассол вытекает из резервуара со
скоростью 3 галлона в секунду. Сколько соли будет содержать резервуар, когда он заполнится
рассолом?
38. Рассмотрим каскад из двух резервуаров, показанных на рис. 1.5.5, причем объемы морской
воды в двух резервуарах равны Vi = 100 (гал) и Vi = 200 (гал). Каждый резервуар
первоначально содержит также 50 фунтов соли. Через каждую из трех труб, показанных на рисунке,
вливается 5 галлонов жидкости в минуту, причем чистая вода вливается в резервуар 1. (а)
Найдите количество x(t) соли в резервуаре 1 в момент времени t. (b) Предположим, что y(t) —
количество соли в резервуаре 2 в момент времени t. Покажите сначала, что
dy __ Ъх Ъу
~аЧ~"Ш~ 200'
а затем решите это уравнение относительно y(t), используя функцию x(t), найденную в части
(а), (с) Наконец, найдите максимальное количество соли в резервуаре 2.
39. Предположим, что в каскаде, показанном на рис. 1.5.5, резервуар 1 первоначально содержит
100 галлонов чистого этанола, а резервуар 2 первоначально содержит 100 галлонов чистой
воды. Чистая вода вливается в резервуар 1 со скоростью 10 галлонов в минуту, и через другие
две трубы также протекает 10 галлонов в минуту, (а) Найдите количества x(t) и y(t) этанола
в двух резервуарах в момент времени t > 0. (b) Найдите максимальное количество этанола
в резервуаре 2.
40. Множественный каскад показан на рис. 1.5.6. В момент времени t = 0 резервуар 0 содержит
1 галлон этанола и J галлон воды; все остальные резервуары содержат 2 галлона чистой воды
1.5. Линейные уравнения первого порядка 97
Резервуар О
Резервуар 1
Объем Vi
Количество х
Резервуар 1
Резервуар 2
Резервуар 2
Объем \?2
Количество у
Рис. 1.5.5. Каскад из двух резервуаров
Резервуар п
Рис. 1.5.6. Множественный каскад
каждый. Чистая вода накачивается в резервуар 0 со скоростью 1 галлон в минуту, и
изменяющаяся смесь в каждом резервуаре накачивается в резервуар ниже данного с той же самой
скоростью. Примите, как обычно, что смеси в результате перемешивания являются совершенно
однородными. Пусть xn(t) обозначает количество этанола в резервуаре п в момент времени t.
(а) Покажите, что xo(t) = e_t/2. (b) Покажите индукцией по п, что
Xn(t)
n-t/2
tne
n!2n
для п > 0.
(с) Покажите, что максимальное значение xn(t) для п > 0 равно Мп = ппе п/п\. (d)
Используя формулу Стирлинга для аппроксимации п\ « ппе~пу/2тгп, покажите, что Мп ~
«B7ГП)/2.
41. 30-летняя женщина занимает должность инженера с начальным заработком 30000 долларов
в год. Ее заработок S(t) увеличивается по экспоненте, причем S(t) = ЗОе*/20 тысяч долларов
через t лет. Тем временем 12% заработка депонируются непрерывно на пенсионный счет, на
котором сумма накапливается непрерывно по ежегодной норме 6%. (а) Выразите АА через At,
чтобы получить дифференциальное уравнение, удовлетворяемое величиной A(t) — суммой на
ее пенсионном счете после t лет. (Ь) Вычислите сумму АD0) на момент выхода на пенсию
в 70 лет.
42. Предположим что градина с плотностью 6 = 1 начинает падение с состояния покоя, имея
незначительный радиус г = 0. При падении ее радиус г = Ы (к — константа), поскольку он
растет (градина увеличивается во время ее падения). Поставьте и решите задачу Коши (задачу
с начальными условиями)
— (mv) = mgy v@) = 0,
98 Глава 1. Дифференциальные уравнения первого порядка
Рис. 1.5.7. Поле направле- Рис. 1.5.8. Поле
направлений и интегральные кривые ний и интегральные кривые
уравнения у' = х — у уравнения у' = х + у
где т — переменная масса градины, v = dy/dt — ее скорость, а ось у направлена вниз. Затем
покажите, что dv/dt = д/А. Таким образом, градина падает, как бы под влиянием менее чем
одной четвертой силы тяжести.
43. На рис. 1.5.7 показано поле направлений и типичные интегральные кривые уравнения у' =
= х — у. (а) Покажите, что каждая интегральная кривая приближается к прямой линии у =
= х — 1 при х —> +оо. (Ь) Для каждого из пяти значений у\ = 3,998, 3,999, 4,000, 4,001
и 4,002 определите начальное значение ,уо (с точностью до четырех десятичных знаков) так,
чтобы уE) = 2/i для решения, удовлетворяющего начальному условию у (—5) = уо.
44. На рис. 1.5.8 показано поле направлений и типичные интегральные кривые уравнения у' — ж+
+ г/, (а) Покажите, что каждая интегральная кривая приближается к прямой линии у — —х - %
при х —► —оо. (Ь) Для каждого из пяти значений у\ = —10, —5, 0, 5 и 10 определите (с
точностью до пяти знаков) начальное значение уо такое, что г/E) = у\ для решения, уцовлетворяю-j
щего начальному условию у{—5) = уо.
В задачах 45 и 46 мы рассматриваем мелкий бассейн, причем площадь поверхности воды в немрщ
на одному квадратному километру, а средняя глубина воды — 2 метрам. Первоначально он заполнщ
пресной водой, но в момент времени t = 0 вода, загрязненная жидким загрязнителем, начинаеЩ
течь в бассейн со скоростью 200 тысяч кубических метров в месяц. Хорошо перемешанная вода]
вытекает из бассейна с той же самой скоростью. Ваша первая задача состоит в том, чтобщ
найти количество x(t) загрязнителя (в миллионах литров) в бассейне после t месяце^.
45. Поступающая вода имеет концентрацию загрязнителя c(t) = 10 литров на кубический метр,!
Проверьте, что график x(t) напоминает устойчиво поднимающуюся кривую на рис. 1.5.9, юн
торая асимптотически приближается к графику равновесного решения х{€) = 20, который
соответствует длительному содержанию загрязнителя в бассейне. Сколько времени потребуется,
чтобы концентрация загрязнителя в бассейне достигла 5 литров на кубический метр? \
46. Поступающая вода имеет концентрацию загрязнителя c(t) — 10A -h cost) л/м3, которая
изменяется между 0 и 20, причем средняя концентрация равна 10 л/м3, а период колебания немного
превышает б| месяца. Правда ли, что содержание загрязнителя в озере в конечном счете будет
колебаться периодически около среднего уровня 20 миллионов литров? Проверьте, что гра*;
фик x(t) действительно напоминает колеблющуюся кривую, показанную на рис. 1.5.9. Скольку
времени потребуется, чтобы концентрация загрязнителя в бассейне достигла 5 л/м3?
1.5. Линейные уравнения первого порядка
99
¥W
Задача 46
Задача 45
10 20 30 40 50 60
Рис. 1.5.9. Графики решений
в задачах 45 и 46
1.5. Приложение. Колебания температуры внутри
помещения
В интересной прикладной задаче, в которой используется решение линейного
дифференциального уравнения, рассматриваются колебания температуры внутри помещения, которые
вынуждаются наружными колебаниями температуры, имеющими форму
A(t) = ао 4- а\ cosut + Ь\ smut.
со
Если ш = 7г/12, то эти колебания имеют период 24 часа (так что цикл колебания наружной
температуры повторяется ежедневно). Например, в течение типичного дня июля в г. Атенс
(Афины в штате Джорджия) минимальная температура равна 70° F в момент времени t = 4
D утра), а максимум 90 °F достигается, когда t = 16 D часа пополудни). В этом случае мы
взяли бы
A(t) = 80 - 10cosu;(t - 4) = 80 - bcosut - 5>/3sinurt.
B)
МыполучилиуравнениеB),используятождествосо8(а—/?) = cosacos/3-bsinasin/3.3aTeM
мы определили значения коэффициентов ао = 80, ai = —5и&1 = — 5л/3 в уравнении A).
Если мы запишем закон Ньютона для охлаждающегося тела (уравнение C) из раздела 1.1)
для соответствующей внутренней температуры u(t) в момент времени t, но вместо
постоянной температуры А окружающей среды A(t) подставим внешнюю температуру, данную
уравнением A), мы получим линейное дифференциальное уравнение первого порядка
du
It
-k(u-A(t));
иными словами,
du , ,, i . \
— + ки = к(ао + а\ cos ut 4- 0i sincjr)
dt
C)
с коэффициентами (функциями) P(t) = к и Q(t) = kA(t). Типичные значения константы
пропорциональности к лежат в интервале от 0,2 до 0,5 (хотя к может быть больше, чем 0,5
для плохо изолированного здания с открытыми окнами, или меньше, чем 0,2 для хорошо
теплоизолированного здания с плотно (почти герметично) закрытыми окнами).
100 Глава 1. Дифференциальные уравнения первого порядка
Сценарий. Предположим, что однажды в полночь (в момент времени to = 0) наш
кондиционер сломался, и мы не можем отремонтировать его до дня зарплаты в конце месяца.
Мы поэтому хотим исследовать колебания температуры в комнате, которые нам придется
терпеть в течение нескольких следующих дней.
Начните ваше исследование с решения уравнения C) с начальным условием и@) = щ
(внутренняя температура во время отказа кондиционера). Вы можете использовать систему
компьютерной алгебры. Вы должны получить решение
u{t) = ао + coe~kt + c\ coswt + d\ sinu;£, D)
где
со = uq - а0 -£~—о
к2 Л-'-'2,
кга\ — kujbi
к2а\ — kubi kua\ + к2Ь\
Cl = къ+и* ' г = tf+u* '
причем о; = 7г/12.
Приао = 80, ai = —5,61 = — 5л/3 (как в уравнении B)) и — 7г/12и& = 0,2 (например),
это решение приводится (приблизительно) к
u(t) = 80 + e~t/b (uo - 82,3351) + B,3351) cos ^ - E,6036) sin ^-. E)
Заметьте сначала, что затухающий показательный член в уравнении E) стремится к нулю
при t —► +оо, почти не влияя на длительное "устоичивое периодическое" решение
7Г£ . ЛЛЛЛч . Ttt
— -E,6036) sin—.
isp(£) = 80 + B,3351) cos — - E,6036) sin —. F)
Следовательно, через длительное время внутренняя температура колеблется каждые 24 часа
около той же самой средней температуры 80° F, что и средняя наружная температура.
На рис. 1.5.10 показано множество интегральных кривых, соответствующих возможным
начальным температурам uq в пределах от 65°F до 95°F. Заметьте, что независимо от
начальной температуры внутренняя температура устанавливается в течение приблизительно
18 часов и входит в режим периодических ежедневных колебаний. Но амплитуда изменения
температуры в закрьггом помещении меньше, чем на открытом воздухе. Действительно,
используя тригонометрическое тождество, упомянутое раньше, равенство F) можно
переписать (проверьте это!) в виде
u(t) = 80 - F,0707) cos ( Ц- - 1,9656 J =
= 80 - F,0707) cos ^-(t - 7,5082). G)
Понятно ли вам, что отсюда следует, что внутренняя температура изменяется между
минимумом, равным приблизительно 74°F, и максимумом, равным приблизительно 86° F?
Наконец, сравнение уравнений B) и G) показывает, что внутренняя температура отстает
от наружной температуры примерно на 7,5082 — 4 « 3,5 часа, как показано на рис. 1.5.11.
1.6. Замена переменных и уравнения в полных дифференциалах 101
20 30
t (часы)
Рис. 1.5.10. Интегральные
кривые для уравнения E) при щ =
= 65,68,71,..., 92,95
100
95
90
"П г—i—i—п
i i Температура
44ополуц|ш на улице
IX- • I I"
|/ ТиОпо]
| I Температура]
i i внутри
if =12 \t = 24 If = 36
J L_l I L_L
20 30
t (часы)
40
Рис. 1.5.11. Сравнение
внутренних и наружных колебаний
температуры
Таким образом, каждый вечер температура в доме продолжает повышаться примерно до
19:30, так что самая жаркая часть дня внутри—ранний вечер, а не поздний день (как снаружи).
Выполните подобный анализ, используя средние ежедневные максимальные и
минимальные значения температуры в июле в вашей местности, взяв значение к для вашего
собственного дома. Вы можете также провести аналогичное исследование для зимнего дня
вместо летнего. (Чем отличаются задачи о внутренней температуре для зимнего и летнего
дня?)
1.6. Замена переменных и уравнения в полных
дифференциалах
Все дифференциальные уравнения первого порядка, которые мы решили в предыдущих
разделах, были или с разделяющимися переменными, или линейными. Но многие
приложения приводят к дифференциальным уравнениям, которые не являются ни уравнениями
С разделяющимися переменными, ни линейными. В этом разделе мы иллюстрируем
(главным образом на примерах) различные замены переменных, которые иногда могут помочь
преобразовать данное дифференциальное уравнение в такое, которое мы уже знаем, как
решить.
Например, дифференциальное уравнение
dy
dx
= f(x,y),
С зависимой переменной у и независимой переменной х может содержать выражение
v = a(x,y),
О)
B)
iKOTopoe входят х и у, такое, что его можно взять в качестве новой независимой переменной v.
^Чким образом, в дифференциальном уравнении
dy
dx
= (х + у + гу
фактически требуется замена v = х 4- у 4- 3, приведенная в равенстве B).
102 Глава 1. Дифференциальные уравнения первого порядка
Если уравнение B) может быть разрешено относительно
У = /?(*,*), C)
то применение правила дифференцирования сложной функции v, рассматриваемой как
(неизвестная) функция переменной х, дает
dy_ = df^dx + dfi_ <fo = + dv
dx с?х dx dv dx x v dx'
где частные производные д/3/дх = /3x(x,v) и д/3/dv = /3v(x,v) являются известными
функциями переменных жиг;. Если мы подставим правую часть для dy/dx из уравнения A)
в уравнение D) и затем решим полученное уравнение относительно dv/dx, в результате
получится новое дифференциальное уравнение вида
^=9{x,v) E)
с новой зависимой переменной v. Если это новое уравнение является уравнением с
разделяющимися переменными или линейным, то мы можем применить методы предыдущих
разделов для его решения.
Если г; = v (х) — решение уравнения E), то у = /?(х, v(x)) будет решением
первоначального уравнения A). Фокус состоит в том, чтобы выбрать замену такой, чтобы мы смогли
решить преобразованное уравнение E). Даже если это возможно, это далеко не всегда
просто; это может потребовать изобретательности, огромного количества неудачных попыток
и разочарований из-за ошибок.
Пример 1
Решим дифференциальное уравнение
% = (Х + у + 3)\
dx
Решение Как указывалось раньше, давайте попробуем выполнить замену
v = х 4- у 4- 3; т. е. у = v — х — 3.
Тогда
dy _ dv
dx dx
так что преобразованное уравнение примет вид
dv л о
dx
Это уравнение с разделяющимися переменными, и совсем нетрудно
получить его решение
_ f dv
arctg v + C.
Так что v = tg(x — С). Поскольку v = х 4- у 4- 3, общее решение
первоначального уравнения dy/dx = (х 4- у 4- ЗJ имеет вид х 4- у 4-3 = tg(x —С);
иными словами,
у(х) = tg(x - С) - х - 3. ■
1.6. Замена переменных и уравнения в полных дифференциалах 103
Замечание. На рис. 1.6.1 показано поле направлений и типичные интегральные кривые
для дифференциального уравнения из примера 1. Мы видим, что, хотя функция f(x,y) =
= (х + у 4- ЗJ непрерывно дифференцируема для всех х и у, каждое решение непрерывно
только на ограниченном интервале. В частности, поскольку функция тангенс непрерывна
на открытом интервале (—7г/2,7г/2), частное решение с произвольным значением
постоянной С непрерывно на интервале — 7г/2 < х — С < 7г/2; т. е. на интервале С — 7г/2 < х <
<С + тг/2. ■
Рис. 1.6.1. Поле направлений и интегральные кривые
уравнения у' = (х -Ь у + ЗJ
Пример 1 иллюстрирует тот факт, что любое дифференциальное уравнение вида
dy
dx
= F(ax Л-by Л-с)
F)
можно преобразовать в уравнение с разделяющимися переменными с помощью замены
и = ах + by 4- с (см. задачу 31). В следующих абзацах рассматриваются другие классы
уравнений первого порядка, для которых существуют стандартные замены, о которых известно,
. что они приводят к успеху.
Однородные уравнения
Однородное дифференциальное уравнение первого порядка—это уравнение, которое
можно записать в форме
► Ф
dx
Если сделать замену
У
х
y = vx,
'(I)
dy
G)
dx dx'
(8)
p уравнение G) преобразуется в уравнение с разделяющимися переменными
Х- = F(v)
V.
|аким образом, каждое однородное дифференциальное уравнение первого порядка
посредством замен (8) может быть сведено к задаче интегрирования.
104 Глава 1. Дифференциальные уравнения первого порядка
Решим дифференциальное уравнение
ах
Решение Это уравнение не является ни уравнением с разделяющимися
переменными, ни линейным, но мы распознаем его как однородное уравнение,
записывая в форме
dy 4х2 4- Зу2
dx 2xy
Замены (8) тогда принимают вид
-ей©
dy dv у 1 х
y = vx, —— =v + х—, v=— и - = —.
dx dx x v у
Они приводят к уравнению
dv 2 3
г; 4-х—- = - + -v
dx v 2
и, следовательно, к уравнению
dv _ 2 г; _ v2 4- 4
dx г; 2 2v
—z т dv = — dx;
J v2 4- 4 J x
ln(u24-4)=ln|x|4-lna
Мы применяем показательную функцию к обеим частям последнего
уравнения, после чего получаем
г;2 + 4 = С|х|;
|!+4 = С|х|;
2/24-4х2 = кх3.
Обратите внимание, что левая часть этого уравнения обязательно
неотрицательна. Из этого следует, что к > 0 в случае решений, которые
определены для х > 0, в то время как к < 0 для тех решений, где х < 0.
Действительно, семейство интегральных кривых, показанных на
рис. 1.6.2, симметрично относительно обеих координатных осей.
Фактически существуют положительные и отрицательные решения вида у (х) =
= ±у/кх3 — 4х2 которые определены для х > 4/fc, если константа к
положительна, и для х < 4/fc, если к отрицательна. ■
1.6. Замена переменных и уравнения в полных дифференциалах
105
Рис. 1.6.2. Поле направлений и интегральные кривые
уравнения 2хуу' = 4х2 4- Зу2
Пример 3
Решим задачу Коши (задачу с начальными условиями)
х—■ = у + у/х2 -у2, у(х0) = 0
ах
при хо > 0.
Решение Деля обе части на х, находим, что
&У_ = 2/
etc х
f^'-
так что, делая замены (8), получаем
dv
v 4- ж-7- = ^ 4- V 1 — v2 ;
ах
—. dv = \ — dx:
arcsin v = In x 4- С.
Мы не обязаны писать In |х|, потому что х > 0 в окрестности х =
= хо > 0. Теперь обратите внимание, что г;(хо) = у(хо)/х0 = 0, так
что С = arcsin 0 — In хо = — In x0. Следовательно,
У
v = — = sin (lnx — lnxo) = sin
x
(in-V
и поэтому функция
г/(я)
= х sin (In — I
как раз и представляет собой искомое частное решение. Поскольку
область значений arcsin v = ln(x/xo) представляет собой интервал —7r/2 ^
5* ln(x/xo) ^ тг/2, из этого следует, что данное частное решение
определено на интервале хое-71"/2 й х й хое71"/2. На рис. 1.6.3 показаны
106 Глава 1. Дифференциальные уравнения первого порядка
некоторые типичные интегральные кривые. Из-за корня в
дифференциальном уравнении эти интегральные кривые не выходят из обозначенной
треугольной области х ^ \у\. Вы можете проверить, что границы у = х
и у = —х (для х > 0) — особые интегральные кривые, которые состоят
из точек касания к ранее найденным интегральным кривым. ■
50 | , , г
40hy = sin(ln(x/20))^y =
Ly = sin(ln(jc/10)),
Рис. 1.6.3. Интегральные кривые
уравнения ху' = у + у/х2 — у2
Уравнения Бернулли
Дифференциальное уравнение первого порядка вида
> ^ + Р(х)у=д(хJ/п
(9)
называется уравнением Бернулли. Если п = 0 или п = 1, то уравнение (9) линейно.
В противном случае в задаче 56 показывается, что замена
1-п
> V = y
преобразует уравнение (9) в линейное уравнение
A0)
dv
dx
+ A - n)P(x)v = A - n)Q(x).
Вместо того чтобы запоминать форму этого преобразованного уравнения, удобнее делать
замену в уравнении A0) явно, как в следующих примерах.
Пример 4
Если мы перепишем однородное уравнение 2хуу' = Ах2 + Зу2 из
примера 2 в виде
<% _ JJ_ _ 2х
dx ~ 2хУ ~ у '
то мы увидим, что оно является также уравнением Бернулли, причем
Р(х) = —3/Bх), Q(x) = 2х, п = —1 и 1 — h — 2. Следовательно, мы
1.6. Замена переменных и уравнения в полных дифференциалах 107
подставляем
2 1/2 dV dV dv 1 _1/2 dv
ax av ax 2 ax
Это дает
V1/2^-Avl/2=2xV-l/2.
2 dx 2x
Затем умножение на 2?;1/2 приводит к линейному уравнению
dv 3
v = 4х
ах х
с интегрирующим множителем р = е^/^dx = х~3. Так что мы
получаем
Dx(x~sv) = —;
х2
x~3v = — + С;
х
х
у2 = _4х2+СхЗ В
Пример 5
Уравнение
х^+б2/ = Зхг/4/3
не является ни уравнением с разделяющимися переменными, ни
линейным, ни однородным, но это уравнение Бернулли, причем п = |, 1 — п =
= — |. Замены
v= -1/3 =v~3 и ^ = ^—= -Зг;—
' dx eft; dx dx
преобразовывают его к виду
-ЗхгГ4-^ 4- 6гГ3 = ЗхгГ4.
ах
Деление на —Зхг;-4 дает линейное уравнение
— _ 1 - _i
dx х
с интегрирующим множителем р = е-^/^dx = x~2. Это дает
Ас(#~~2^) =—о\ x~2v——\-С\ v = х + Сх2
х^ х
и, наконец,
108 Глава 1. Дифференциальные уравнения первого порядка
Пример 6
Уравнение
2хе2^=3*4 + е2
ах
(и)
не является ни уравнением с разделяющимися переменными, ни
линейным, ни однородным и даже не является уравнением Бернулли. Но мы
замечаем, что у появляется только в выражениях е2у и Dx (e2y) — 2e2yyf.
Это подсказывает замену
v = e2y, ^=2e24,
ах ах
которая преобразует уравнение A1) в линейное уравнение xi/(x) = Зх4+
+ v(x);t. е.
ах х
После умножения на интегрирующий множитель р = 1/х находим, что
—v = Зх2 dx = х3 + С, так что е2у = v = хА + Сх,
я J
2/(x) = |ln|x4 + Cx|. ■
и, следовательно,
Траектория полета
Предположим, что самолет вылетает из точки (а, 0), расположенной к востоку от аэропорта
назначения, расположенного в начале координат @,0). Самолет перемещается с постоянной
скоростью vo относительно ветра, который дует на север с постоянной скоростью w. Как
показано на рис. 1.6.4, мы предполагаем, что пилот держит курс на начало координат.
Рис. 1.6.5 помогает получить компоненты скорости самолета относительно земли. Они
равны
dx л vqx
— —vo cos в —
dt
v^TF'
dy . л , v0y
о* ух2 4- 2/2
+ w.
V*2 + v2
ki*_
I
J c
*>o
Рис. 1.6.4. Самолет держит Рис. 1.6.5. Компоненты скоро-
курс на начало координат ~~ ста вектора самолета
1.6. Замена переменных и уравнения в полных дифференциалах 109
Следовательно, траектория у = /(#) самолета удовлетворяет дифференциальному
уравнению
*-Ш-М--~***)- ■ A2)
Если мы положим
* = -, A3)
т. е. введем константу к, равную отношению скорости ветра к скорости полета самолета, то
уравнение A2) преобразуется к однородному вида
£-!-*И)Г-
Замена у = xv, у' = v + xv' приведет его к виду
\wb-\>-
Воспользовавшись тригонометрической подстановкой или таблицей интегралов, мы
находим, что
In А; + \Л + v2) = -klnx + С, A6)
и начальное условие v(a) = у (а) /а = 0 дает
С = к\па. A7)
Согаасно задаче 68, в результате подстановки A7) в уравнение A6) и последующего решения
полученного уравнения относительно г;, получаем.
~§ [(Г -(!)']■
Поскольку у = xv, мы наконец получаем
*>-§ [(II"*-(f)
1+fc"
A9)
в качестве уравнения траектории самолета.
Обратите внимание, что кривая, определяемая уравнением A9), проходит через начало
координат только в случае & < 1 (т. е. в случае w < vo), так что самолет достигнет аэропорта
назначения только в этом случае. Если w = vo (так что к = 1), то уравнение A9) примет
форму у{х) = \аA — х2/а2)у так что траектория самолета приближается к точке @, а/2),
а не к @,0). Ситуация еще хуже, если w > vo (так что к > 1) — в этом случае, как следует из
уравнения A9), у —► +оо при х —> 0.
110 Глава 1. Дифференциальные уравнения первого порядка
Пример 7
Если а — 200 миль, vo — 500 миль в час и w = 100 миль в час, то к =
= w/vo = ^,такчтосамолетуспещно долетит доаэропортавточке@,0).
При этих значениях уравнение A9) дает
у(х) = 100
' х \
.200/
4/5
/ X \6/5
V200
П •
B0)
Теперь предположим, что мы хотим найти максимальное расстояние, на
которое самолет относится ветром от курса во время полета. Иными
словами, мы хотим найти максимальное значение у(х) для 0 ^ х й 200.
Решение Дифференцирование функции у(х) из уравнения B0) дает
15 V200/ ~5V200/ J'
0. В результате получаем
dy_
dx
и мы легко решаем уравнение у'{х)
(ж/200J/5 = |. Следовательно,
2/тах = ЮО
©!-A)!
27
Таким образом, самолет уносится почти на 15 миль на север во время
его полета на запад. (График функции из уравнения B0) приведен на
рис. 1.6.4. Вертикальный масштаб там увеличен в 4 раза.) ■
Дифференциальные уравнения в полных дифференциалах
Мы видели, что общее решение у (х) дифференциального уравнения первого порядка часто
определяется неявно уравнением вида
F(x,y(x)) = C, B1)
где С — константа. С другой стороны, учитывая тождество B1), мы можем восстановить
первоначальное дифференциальное уравнение, дифференцируя каждую часть по х. При
условии, что уравнение B1) неявно определяет у как дифференцируемую функцию х, это
позволяет переписать первоначальное дифференциальное уравнение в форме
9F + 9Fdy =0.
дх ду dx
иными словами,
Af(x,y) + JV(a?,i/)£=0,
B2)
где М (я, у) = Fx(x, у) и N(x, у) = Fy(x, у).
1.6. Замена переменных и уравнения в полных дифференциалах 111
Иногда удобно переписать уравнение B2) в более симметричной форме
► М (ж, у) dx + N(x, у) dy = 0. B3)
/равнение в таком виде называется уравнением в дифференциальной форме. Общее
дифференциальное уравнение первого порядка у' = /(х, у) можно записать в этой форме, если
тринять, что М = /(ж, у) и N ~ — 1. Ранее было показано, что если существует функция
F(x, у) такая, что
dF dF АТ
— = М и — = АГ,
ах ду
по уравнение
► F{x,y) = C
Неявно определяет общее решение уравнения B3). В этом случае уравнение B3) называют
уравнением в полных дифференциалах4, поскольку дифференциал
dF = Fxdx + Fy dy
Ьункции F(x, у) в точности представляет собой Mdx -f- Ndy.
Естественно, возникают следующие вопросы. Как определить, является ли
дифференциальное уравнение B3) уравнением в полных дифференциалах? И если это так, как найти
функцию F такую, что Fx = М и Fy — N? Чтобы ответить на первый вопрос, давайте
вспомним, что если смешанные частные производные второго порядка Fxy и Fyx
непрерывны на открытом множестве в плоскости ху, то они равны: Fxy = Fyx. Если уравнение B3)
ввляется уравнением в полных дифференциалах, причем и М, и N имеют непрерывные
растные производные, то тогда
9у ~ **v ~ 'v* ~ дх ■
[Таким образом, равенство
ду дх
является необходимым условием того, что дифференциальное уравнение Mdx -f Ndy = 0
представляет собой уравнение в полных дифференциалах. Иными словами, если My ф Nx,
ро рассматриваемое дифференциальное уравнение не является уравнением в полных
дифференциалах, так что не стоит даже пытаться найти функцию F(x, у) такую, что Fx = М
b Fy = N; такая функция не существует.
Пример 8
Дифференциальное уравнение
у3 dx + Зху2 dy = 0 B5)
является уравнением в полных дифференциалах, потому что функция
F(x, у) = ху3 имеет частные производные Fx = у3 и Fy = Зху2. Таким
образом, общее решение уравнения B5) можно записать в виде
ху3 = С
или, если хотите, в виде у(х) = кх~х/3. ■
И А также уравнением в точных дифференциалах и точным уравнением. — Примеч. ред.
112 Глава 1. Дифференциальные уравнения первого порядка
Но предположим, что мы разделили каждую часть дифференциального уравнения из
примера 8 на у2 и получили
ydx + 3xdy = 0. B6)
Это уравнение не является уравнением в полных дифференциалах, потому что при М — у
и N = Зж мы имеем
дМ dN
ду дх
Следовательно, необходимое условие в уравнении B4) не удовлетворяется.
Мы здесь сталкиваемся с любопытным явлением. Дифференциальные уравнения B5)
и B6) по существу эквивалентны и они имеют точно те же самые решения, но одно из них
является уравнением в полных дифференциалах, а другое — нет. Короче говоря, является ли
данное дифференциальное уравнение уравнением в полных дифференциалах, зависит от
вида Mdx + Ndy = 0, в котором оно записано. Теорема 1 говорит нам, что (при условиях
дифференцируемое™, которые на практике обычно удовлетворяются) необходимое
условие B4) является также и достаточным условием для того, чтобы уравнение было
уравнением в полных дифференциалах. Другими словами, если Му = Nx, то дифференциальное
уравнение Mdx + Ndy = 0 представляет собой уравнение в полных дифференциалах.
Теорема 1
Критерий уравнения в полных дифференциалах
Предположим, что функции М(ж, у) и N(x, у) непрерывны и имеют непрерывные частные
производные первого порядка в открытом прямоугольнике R: a<x<b9c<y< d. Тогда
дифференциальное уравнение
М (ж, у) dx + N{x, y)dy = 0 B3)
является уравнением в полных дифференциалах в Д, если и только если
в каждой точке R. Иными словами, существует определенная на R функция F(x, y)9 такая
что dF/dx = М и dF/ду = N, если и только если равенство B4) выполнено на R.
Доказательство. Мы уже видели, что если уравнение B3) является уравнением в
полных дифференциалах, то равенство B4) выполняется. Чтобы доказать обратное
утверждение, мы должны показать, что если справедливо равенство B4), то мы можем найти функцию
F(x,y) такую, что dF/dx = М и dF/ду = N. Сначала обратите внимание, что для любой
функции g (у) функция
F(x, у) = J M (ж, у) dx + g(y) B7)
удовлетворяет условию dF/dx = М. (В равенстве B7) J M(ж, у) dx обозначает
примитивную (неопределенный интеграл) функции М(ж, у) по ж.) Мы планируем выбрать д{у) так,
чтобы
N=d^={S-y\M{x'v)dX)+9'{y)>
.6. Замена переменных и уравнения в полных дифференциалах 113
, е. так, чтобы
g'(y)=N--^^M(x,y)dx. B8)
[тобы убедиться, что такая функция у существует, достаточно показать, что правая часть
уравнении B8) является функцией только от у. Мы можем тогда найти д (у), интегрируя по
. Поскольку правая часть уравнения B8) определена на прямоугольнике и, следовательно,
пределена на интервале как функция х, достаточно показать, что ее производная по х
ождественно равна нулю. Но
д_
дх
(N-l^Mix^dx^^-^lJuix^dx^
dN 9 9 [ш
М(х, у) dx =
дх ду дх
dN дМ
дх ду
\ соответствии с условием теоремы. Так что мы действительно можем найти искомую
функцию д(у), интегрируя уравнение B8). Мы подставляем этот результат в уравнение B7)
\получаем
F(x, у)=\ М(х, у) dx + J (n(x, y)~J-\ м(*> У) dxj dV B9)
f качестве искомой функции, удовлетворяющей условиям Fx = MnFy = N. А
Вместо того чтобы запоминать уравнение B9), обычно лучше решить уравнение в полных
|[ифференциалах Mdx -f Ndy = 0, повторяя выкладки, указанные в уравнениях B7) и B8).
рначала мы интегрируем М(ж, у) по х и пишем
F(x, у) = М(х, у) dx + д(у),
:читая функцию д (у) "произвольной постоянной интегрирования", поскольку мы работаем
: переменной х. Затем мы определяем д (у), налагая условие dF/dy = N(x,y). Это приводит
1собщемурешениювнеявнойформе^(ж,?/) = С.
Пример 9
Найдем решение дифференциального уравнения
(бху - ys) dx -f (Ay + Зх2 - Зху2) dy = 0. C0)
Решение ПустьМ(х,у) = 6xy—y3nN(x,y) = 4у-\- Зх2 — Зху2. Данное уравнение
является уравнением в полных дифференциалах, потому что
9М o2_dN
ду дх
114 Глава 1, Дифференциальные уравнения первого порядка
Интегрируя dF/дх = М(х, у) по х, получаем
F(s, у) = (бжу - у3) dx = Зх2у - ху3 + д(у).
Затем мы дифференцируем по у'и полагаем dF/dy = N(x, у). Это влечет
— = Зх2 -. Зху2 +У(»).= 4?/ + Зх2 - Зху2,
а из этого следует, что д'(у) = ,,4уЛ Следовательнр,,<j(y) ^ 2у2 Н-Ci
и, таким образом,
F(s, у) = Зх2?/ - яг/3 + 2у2 + Сь
Поэтому общее решение дифференциального уравнения определено
неявно уравнением
Зх2у - ху3 + 2у2 = С
(мы включили константу С\ в константу С).
C1)
Замечание. На рис. 1.6.6 показано довольно сложное строение интегральных кривых
для дифференциального уравнения из примера 9. Решение, удовлетворяющее данному
начальному условию у (хо) = у о, определено неявно уравнением C1), причем С определяется
подстановкой х = хо и у = уо в это уравнение. Например, частное решение,
удовлетворяющее условию ?/@) = 1, определено неявно уравнением Зх2у — ху3 + 2у2 = 2. Другие две
особые точки на рисунке — это начало координат @,0) и точка рядом с точкой @,75, 2,12) —
это точки, где обе функции-коэффициенты уравнения C0) обращаются в нуль, так что
теорема о существовании и единственности решения, приведенная в разделе 1.3, не гарантирует
единственность решения. Щ
Рис. 1.6.6. Поле направлений и интегральные
кривые уравнения в полных дифференциалах из
примера9
1.6. Замена переменных и уравнения в полных дифференциалах 115
Уравнения второго порядка, допускающие понижение порядка
Дифференциальное уравнение второго порядка содержит вторую производную
неизвестной функции у(х) и, таким образом, имеет общую форму
F(x,y,i/y) = 0. C2)
Если хоть одна из переменных—зависимая переменная у или независимая переменная х — '
отсутствует в уравнении второго порядка, то оно легко простой заменой приводится к
уравнению первого порядка, которое может быть разрешено методами этой главы.
Зависимая переменная у отсутствует. Если у отсутствует, то уравнение C2) имеет
форму
> F(xyy',y")=0. C3)
Тогда замена
приводит к дифференциальному уравнению первого порядка
F{x,p,p')=0. >
Если мы можем найти общее решение р(ж, С\), содержащее произвольную постоянную С\,
то остается только написать
у(х) = у'{х) dx = р(х, Ci) dx + С2,
чтобы получить решение уравнения C3), которое содержит две произвольные постоянные
С\ и Сг (как и должно быть в случае дифференциального уравнения второго порядка).
Пример 10
Решим уравнение ху" + 2у' = 6х9 в котором отсутствует зависимая
переменная у.
Решение Замена, указанная в C4), дает уравнение первого порядка
dp dp 2
х-—h 2p = 6х; т. е. -—I—р — 6.
ах ах х
Это уравнение является линейным, так что мы умножаем его на его
интегрирующий множитель р = exp (JB/x) dx) = e2lnx = ж2 и получаем
Dx(x2p) = 6х2,
ж2р = 2ж3 + Сь
р= — =2х + -г-.
dx хг
Заключительное интегрирование по х приводит к общему решению
у(х) = х2 + — + С2
116 Глава 1. Дифференциальные уравнения первого порядка
уравнения второго порядка ху" + 2у; = 6ж. Интегральные кривые для
d = 0 — просто параболы, полученные вертикальным сдвигом из
параболы у = х2. На рис. 1.6.7 показаны типичные интегральные кривые
при d = 0. Интегральные кривые при отличных от нуля С\ и d
получаются вертикальными сдвигами из интегральных кривых, показанных на
рис. 1.6.7. ■
Рис. 1.6.7. Интегральные кривые у = х2 +
при Сг = 0, ±3, ±10, ±20, ±35, ±60, ±100
Сг
Независимая переменная х отсутствует. Если отсутствует х9 то уравнение C2)
принимает вид
F(y,y',y") = 0.
C5)
_ , _ ф „ _ ф _ фф _ ф
da;' dx dy dx dy
C6)
>
Тогда замена
приводит к дифференциальному уравнению первого порядка
относительно р как функции у. Если мы можем найти общее решение р(у, С\), содержащее
произвольную постоянную Ci, то (принимая, что у' ф 0) остается только написать
*(y) = jgd* = j^d* = J4 = J^+C,
Если заключительный интеграл Р = J(l/p) dj/ может быть взят, в результате получится
решение х(у) = P(y,d) + С2 нашего дифференциального уравнения второго порядка
в неявном виде.
1.6. Замена переменных и уравнения в полных дифференциалах 117
Решим уравнение уу"
менная х.
{у')г, в котором отсутствует независимая пере-
JH:
Решение Временно мы предполагаем, что у и у' являются неотрицательными, а
затем в конце покажем, что это предположение излишне. Замена,
определенная в C 6), дает уравнение первого порядка
dp 2
yPdx-=P'
Затем разделение переменных дает
У
\пр = 1пу + С (потому что у > О ир = у' > 0),
Р = Сгу,
где С\ = ес. Следовательно,
dx _ 1 _ 1
J 2/
Окончательно найдем общее решение уравнения второго порядка
УУ" = (г/Т в гаде
у(х) = exp(Cia; — С2) = Ае
Вх
где А = е~°2 и В = С\. Несмотря на наше; временное предположение
о том, что обе константы АиВ положительны, мы проверяем, что у(х) =
= АеВх удовлетворяет уу" = {у'J для всех вещественных значений А
и В. При В = 0 и различных значениях А мы получаем все
горизонтальные прямые плоскости как интегральные кривые. В верхней
половине рис. 1.6.8 показаны интегральные кривые, полученные при А = 1
-54-3-2-1 0 1 2 3 4 5
Рис. 1.6.8. Интегральные кривые уравнения у = АеВх
при В = ОиА = 0, ±1 — горизонтальные линии у = 0,
±1. Экспоненты при В > Ои А = ±1 выделены серым
цветом, а при В <0иА = ±1 они нарисованы черными
118 Глава 1, Дифференциальные уравнения первого порядка
(например) и различных положительных значениях В. При А = — 1 эти
интегральные кривые отражаются относительно оси х. А при
отрицательных значениях В они отражаются относительно оси у. В частности,
мы видим, что мы получаем решения уу" = (г/'J, в которых допускаются
и положительные, и отрицательные значения и для у, и для у'. ■
1.6. Задачи
В задачах 1-30 найдите общие решения дифференциальных уравнений. Штрихи везде обозначают
производные по х.
1. (х + у)у' = х - у 2. 2хуу' — х2 + 2у2
3. ху' = у + 2у/ху ^ 4. (х - у)у' = х + у
5. х(х + у)у' = у (х г- у) 6. (х + 2у)у' = у
7. жуУ = х3 + у3 8. х2у' = ху + xVy*
9. хУ = ху + у2 10. хуу' = х2 + Зу2
11. (х2 - 2/2)г/ = 2ху 12. хуу' = у2 + ху^4х2 + у2
13. ху' = у + \/х2 + 2/2 14. уу' + х = у'х2 + у2
15. х(х + 2/У + уCх + у) = 0 16. у' = у/х + У + 1
17. у' = Dх + уJ 18. (х + у)у' = 1
19. х2у' + 2ху = 5у3 20. у2у' + 2ху3 = 6х
21. у' = у-{-у3 22. хУ + 2ху = 5у4
23. ху' + 6у = Зху4/3 24. 2ху' -f у3еж = 2ху
25. у2{ху' + у)A + х4I/2 = х 26. ЗуУ + у3 = е~*
27. Зху2у' = Зх4 + у3 28. хеУ = 2{еу + х3е2*)
29. Bх sin у cos у)у' = 4х2 + sin2 у 30. (х + еу )у' = хе~у - 1
В задачах 31-42 проверьте, что данное дифференциальное уравнение является уравнением в полных
дифференциалах, а затем решите его.
31. Bх + Зу) dx + (Зх + 2у) dy = 0 32. Dх - у) dx + Fу - х) dy = 0
33. (Зх2 + 2у2) dx + Dху + 6у2) dy = 0 34. Bху2 + Зх2) dx + Bх2у + 4у3) dy = 0
35. (х3 + ^) dx + (у2 + Inx) dy = 0 36. A + уеху) dx + Bу + хеху) dy = 0
х + у
1 + У2
39. (Зх2у3 + У4) dx + (Зх3у2 + у4 -f 4xy3) dy = 0
40. (еж sin у + tg у) dx -f (е* cos у -f х sec2 у) dy = 0
37. (cosx + In у) dx Ч- ( - + еу J dy = 0 38. (х + arctgy) dx + * ^ *2 dy = 0
41 (^-^l\dx+(^--— —\d
\ у x4 J \x3 y2 y/y)
A/y 2x5/2 - Зу5/3 Д , Зу5/3 - 2x5/2 , _
42' 2x5/2^2/3 d* + 3x3/2yV3 d2/ -u
В задачах 43-54 найдите общее решение каждого приводимого дифференциального уравнения
второго порядка, допускающего понижение порядка. Примите, что х, у и у' положительны, если
это полезно (как в примере 11).
1.6. Замена переменных и уравнения в полных дифференциалах 119
G. ху" = у' 44. уу" + (у'J = О
45. у" + 4у = О 46. ху" + 2/' = Ах
47. 2/" = (у'J 48. х2у"+3ху' = 2
♦9. 2/2/" + (у'J = УУ' 50. 2/" = (я? + 2/'J
51. у" = 2у(у'K 52. 2/32/" = 1
53. у" = ?2/2/' 54. уу" = 3(у'J
55. Покажите, что замена v = ах + Ъу + с преобразует дифференциальное уравнение dy/dx =
= F(ax + fey + с) в уравнение с разделяющимися переменными.
56. Предположим, что п ф О и п ф 1. Покажите, что замена v = у1"™ преобразует уравнение
Бернулли dy/dx + Р(х)у = Q(x)yn в линейное уравнение
£ + A - п)Р(:ф(х) = A - n)Q(x).
57. Покажите, что замена v = In у преобразует дифференциальное уравнение dy/dx + Р(х)у =
= Q(x)(y lny) в линейное уравнение dv/dx + Р(х) = Q(x)v(x).
58. Используйте идею задачи 57 для решения уравнения
»
х- 4r2y+ 2ylny = 0.
59. Решите дифференциальное уравнение
dy х-у-1
dx ж + у + 3'
найдя /i и А; так, чтобы замены х = u + h, у = v + fc преобразовали его в однородное уравнение
dv __ и — v
du u + v'
60. Используйте метод задачи 59, чтобы решить дифференциальное уравнение
dy _ 2у - х + 7
dx 4x-3y-18*
61. Сделайте подходящую замену, чтобы найти решение уравнения dy/dx = sin (ж — у). Содержит
ли это общее решение линейное решение у{х) = х—7г/2, которое легко проверить подстановкой
в дифференциальное уравнение?
62. Покажите, что интегральные кривые дифференциального уравнения
dy уBх3 - у3)
dx хBу3 — х3)
имеют вид х3 + у3 = ЗСху.
03. Уравнение dy/dx = А(х)у2 + В(х)у + С(х) называется уравнением Риккати. Предположим,
что одно частное решение yi (ж) этого уравнения известно. Покажите, что замена
у = у\ + -
преобразует уравнение Риккати в линейное уравнение
120 Глава 1. Дифференциальные уравнения первого порядка
Используйте метод задачи 63 для решения уравнений в задачах 64 и 65 при условии, что yi(x) =
= х —решение каждого из этих уравнений.
ах
66. Уравнение вида
dx
65. 5п + 2ху = 1 + х2 + у2
у = ху +д(у)
C7)
называют уравнением Клеро. Покажите, что однопараметрическое семейство прямых линий,
заданных уравнением
у(х) = Сх+,д(С),
C8)
является общим решением уравнения C7).
67. Рассмотрим уравнение Клеро
У = ху' - \{уJ,
для которого д(у') = — \{у'J в уравнении C7). Покажите, что линия
68.
69.
70.
у = Сх-
\С2
касается параболы у = х2 в точке (|С, \С2). Объясните, почему отсюда следует, что у =
= х2 — особое решение данного уравнения Клеро. Это особое решение и однопараметрическое
семейство прямых линий, являющихся решениями, показаны на рис. 1.6.9.
Выведите уравнение A8) из этого раздела из уравнений A6) и A7).
В условиях примера 7 предположите, что а = 100 миль, vq = 400 миль в час и w = 40 миль
в час. Как далеко на север ветер отнесет самолет?
Как и в тексте, предположите, что самолет держит курс на аэропорт, находящийся в начале
координат. Пусть vo = 500 миль в час и w = 50 миль в час (причем ветер дует на север), а самолет
вылетает из точки B00,150). Покажите, что траектория самолета описывается уравнением
у + у/х2 + у2 = 2B00х9I/10.
Рис. 1.6.9. Решения уравнения Клеро из задачи 67.
"Типичная" прямая линия с уравнением у — Сх — \С2
касается параболы в точке (^С, \С2)
1.6. Замена переменных и уравнения в полных дифференциалах 421
71. Река шириной 100 футов течет на север со скоростью w футов в секунду. Собака начинает
плыть в точке A00,0) и плывет со скоростью vq = 4 фута в секунду, всегда направлясь
к дереву в точке @,0) на западном берегу непосредственно перед отправной точкой, (а) Пусть
w = 2 фута в секунду. Покажите, что собака достигнет дерева. (Ь) Пусть w = 4 фута в секунду.
Покажите, что собака достигает вместо этого точки на западном берегу в 50 футах к северу от
дерева, (с) Пусть w = 6 футов в секунду. Покажите, что собака никогда не достигает западного
берега.
72. Из курса анализа известно, что кривизна к плоской кривой у = у(х) в точке (ж, у) дается
равенством
,: ^ \у"(х)\
[1 + у'(*J]3/2
и что кривизна окружности радиуса г равна к = 1/г. [См. пример 3 в разделе 12.6 учебника
анализа Edwards and Penney, Calculus, 6th edition (Upper Saddle River, NJ: Prentice Hall, 2002).]
Используя замену р = у', получите общее решение дифференциального уравнения второго
порядка
ту" = [1 + (у'J]3/2
(с константой г) в форме
(x-aJ + (y-bf=r2.
Таким образом, окружность радиуса г (или ее часть) — единственная плоская кривая с
постоянной кривизной 1/г.
1.6. Приложение. Решение с помощью
компьютерной алгебры
^*Р1|Т1||Т1|Г«ПГ1|П|М|П1|^Т1|П|ПГ11Т1ГШ11^ПГ1П«'111|1^
Системы компьютерной алгебры обычно включают команды для "автоматического"
решения дифференциальных уравнений. Но две различные такие системы часто дают различные
результаты, эквивалентность которых не очевидна, и конкретная система может дать
решение в чрезмерно сложной форме. Следовательно, решения дифференциальных уравнений
с помощью компьютерной алгебры часто требуют значительной "доработки" или упрощения
человеком-пользователем, чтобы из них можно было извлечь нужную информацию. Ниже
мы иллюстрируем эти проблемы, используя интересное дифференциальное уравнение
-£ = sin(x - у), A)
которое появилось в приложении к разделу 1.3. Команда системы Maple
dsolve( D(y)(x) = sin(х - y(x)), y(x));
приводит к простому и привлекательному результату
{х-2-С\\
у(х) = х - 2arctg ( х _ С1 I , B)
который и был там приведен. Но эквивалентная команда системы Mathematica
DSolve[ у' [х] == Sin[x - y[x]], у[х], к]
122 Глава 1. Дифференциальные уравнения первого порядка
возвращает более сложный результат:
, , ^ 0 -1 Л V4 + 4а: + х2 + 4С1 + 2хС1 + CF ^\ ,_
?/(#) = х ± 2 cos ± , C)
4 ; ^ V4 + Ах + 2я2 + 4С1 + 4яС1 + 2С12 )
Это очевидное несовпадение не необычно, и для другого дифференциального уравнения
система Mathematica вполне может сгенерировать решение в более простой форме. Чтобы
избежать проблем с результатами, которые возникли для уравнений B) и C), обычно
перед передачей дифференциального уравнения системе компьютерной алгебры его нужно
упростить.
Упражнение 1. Покажите, что замена v = х — у в уравнении A) дает уравнение с
разделяющимися переменными
dv .
—■ = 1 — smt>. D)
ах
Теперь команда системы Mathematica
Integrate[1/A - Sin[v]), v] // TrigReduce
дает
i cosv
dv = :— E)
1-smt; 1-smi;
(Система Mathematica по умолчанию опускает постоянную интегрирования.)
Упражнение 2. Примените тригонометрические тождества
sin 2 А = 2 sin A cos А и cos 2 А = cos2 A — sin2 Д
чтобы из уравнения E) вывести
I
l+tg(,,/2). + c.
1 — sin и 1 —tg(v/2)
Упражнение 3. Выведите из F), что уравнение D) имеет общее решение
. . п (х-1 + С
и, следовательно, что уравнение A) имеет общее решение
/ж-1 + С
y(x) = x-2&rcte{x + 1 + c). G)
Упражнение 4. Наконец, установите, что равенства B) и G) дают одно и то же семейство
решений. Каково соотношение между константами С и С1?
Упражнение 5. Покажите, что интеграл в уравнении E) немедленно дает показанное на
рис. 1.6.10 неявное решение, найденное графическим калькулятором.
Резюме
123
[T*«lS|A134frra
F3*
ЧН^Г F* I Ffi- Г""»
■ cteSolve(y' = sifttx - y), x* ►
-gos<x - у) _ Я1
Рис. 1.6.10. Неявное решение уравнения
yf = siri(x — у), найденное графическим
калькулятором TI-89
Исследование. Пусть pnq — две различные цифры, отличные от нуля, в номере вашего
студенческого билета. Рассмотрим дифференциальное уравнение
dy 1 f x
ах р
(8)
(a) Найдите символическое общее решение, используя систему компьютерной алгебры
(и, возможно, некоторые методы, рассмотренные в этой главе).
(b) Найдите символическое частное решение, удовлетворяющее нескольким типичным
начальным условиям вида у(хо) = уо.
(c) Определите возможные значения а и Ь такие, что прямая линия у = ах + b является
интегральной кривой уравнения (8).
(d) Начертите поле направлений и некоторые типичные интегральные кривые. Можете
ли вы увидеть связь между символическим решением и вашими (прямолинейными
и кривыми) интегральными кривыми?
Глава 1. Резюме
В этой главе мы обсудили приложения и методы решения нескольких важных типов
дифференциальных уравнений первого порядка, включая те, которые являются уравнениями
с разделяющимися переменными (раздел 1.4), линейными (раздел 1.5) или уравнениями
в полных дифференциалах (раздел 1.6). В разделе 1.6 мы также обсуждали методы замены,
которые иногда позволяют преобразовать данное дифференциальное уравнение первого
порядка в такое, которое является уравнением с разделяющимися переменными или линейным,
или уравнением в полных дифференциалах.
Чтобы не казалось, что эти методы представляют собой набор специальных и
несвязанных методов, важно обратить внимание, что все они объединены единой идеей.
Дифференциальное уравнение
/Oz,S/,2/) = 0
A)
мы пытаемся записать в форме
А.
dx
[G(x, у)} = 0.
B)
124 Грава 1^ Дифференциальные уравнения первого порядка
Именно для того, чтобы привести его к форме уравнения B), мы умножаем обе части
уравнения A) на подходящий интегрирующий множитель (даже если мы только разделяем
переменные). Но как только мы нашли функцию G(x,y) такую, что уравнения A) и B) являются
эквивалентными, общее решение определено неявно с помощью уравнения
G(xry) = С, C)
которое получается интегрированием уравнения B).
Ниже описан метод, который может помочь решить конкретное дифференциальное
уравнение первого порядка. Он состоит из следующих шагов.
• Можно ли разделить переменные (свести уравнение к уравнению с разделенными
переменными)? Если это так, разделите переменные (сведите уравнение к уравнению с
разделенными переменными) и интегрируйте (раздел 1.4).
• Это линейное уравнение? Иными словами, можно ли его записать в виде
^ + Р{х)у = Q(xO
Если это так, умножьте его на интегрирующий множитель р = ехр (J P dx), указанный
в разделе 1.5.
• Это уравнение в полных дифференциалах! Иными словами, можно ли его записать в виде
Mdx + Ndy = 0, где дМ/ду = dN/dx (раздел 1.6)?
• Если уравнение не является ни уравнением с разделяющимися переменными, ни
линейным и не является уравнением в полных дифференциалах, есть ли замена, которая
позволит свести его к одному из этих типов? Например, является ли оно однородным
(раздел 1.6)?
Многие дифференциальные уравнения первого порядка можно решить с помощью этой
процедуры. Однако еще больше таких, которые решить таким способом не удается.
Поскольку сейчас широко доступны компьютеры, чтобы найти приближенные решения тех
дифференциальных уравнений, которые не могут быть решены явно методами этой главы,
обычно используются численные методы. Действительно, большинство интегральных
кривых, показанных на рисунках в этой главе, было нарисовано с помощью численных
аппроксимаций, а не точных решений. Некоторые численные методы решения дифференциальных
уравнений будут рассмотрены в главе 2.
Глава 1. Обзорные задачи
В задачах 1-30 найдите общие решения дифференциальных уравнений. Штрихи обозначают
производные по х.
1. х3 + Зу - ху' = О 2. ху2 + Зу2 - x2yf = 0
3. ху + у2 - х2у = 0 4. 2хуъ + ех + (Зх2у2 + sin y)yf = 0
5. Зу + х4у' = 2ху 6. 2ху2 + х2у' = у2
7. 2х2у + хъу =1 8. 2ху + х2у' = у2
9. ху' + 2у = 6х2у/у ' 10. у' = 1 + х2 + у2 + х2у2
11. х2уг = ху + Зу2 12. бху3 + 2у4 + (9х2у2 + 8xy3)yf = 0
Обзорные задачи 125
.3
<2
з
3/2
;47|2/3
2
13. 4жу2 4- у' = 5ж4у2 14. ж3у' = х2у — у
15. у' + Зу = Зж2е_3* 16. у' = х2 - 2ху + у:
17. е* + уе*у + (еу 4- жеух)у' = 0 18. 2ж2у - ж3у' = у3
19. 3xV 4- ж3у' = 2у2 20. жу' + Зу = Зж~3/'
21. (ж2 - 1)у' 4- (ж - 1)у = 1 22. ху' = 6у 4- 12ж 4у2/
23. еу 4- у cos а? 4- (жеу 4- sin х)у' = 0 24. 9ж2у2 4- ж3/2у' = у
25. 2у 4- (ж 4- 1)у' = Зж 4- 3
26. 9х1/2у4/3 - 12а:1/V/2 + (8*3'V/S - 15*в'V'V = 0
27. Зу 4- х3у4 4- Зжу' = 0 28. у 4- ху' = 2е2х
29. Bж 4- 1)у' + у = Bж 4-1K/2 30. у' = y/FTy
Каждое из дифференциальных уравнений, приведенных в задачах 31-36, принадлеэюит
к двум различным типам, которые рассматривались в этой главе (уравнение с разделяющимися
переменными, линейное, однородное, Бернулли, уравнение в полных дифференциалах и т.д.).
Следовательно, получите общие решения каждого из этих уравнений двумя различными способами;
потом сравните ваши результаты.
31. ^ = 3(у + 7)х2 32. %- = ху3 - ху
ах ах
33 dy = Зж2 4- 2у2 34 dy = ж4-3у
dx 4жу dx у — Зж
35 dy = 2жу 4- 2х 36 dy = у/у-у
' dx х2 + 1 dx tg ж
ШМ/\^у
ГЛАВА
Математические
модели и численные
методы
2.1. Модели роста населения
В разделе 1А мы врели экспоненциальное дифференциальное уравнение dP/dt — fcP,
имеющее решение Р(£) = Poekt в качестве математической модели естественного
прироста населения, который происходит в результате постоянства показателей рождаемости
и смертности. Здесь мы представляем более общую модель роста населения, которая
учитывает изменение показателей рождаемости и смертности, которые теперь уже не обязательно
будут константами. Как и прежде, однако, наша функция численности населения P(t)
будет непрерывной аппроксимацией фактической численности населения, которая, конечно,
изменяется не непрерывно, а скачками, так как ее приращения являются целыми числами.
Предположим, что численность населения изменяется только в результате рождений
и случаев смерти, а иммиграцию и эмиграцию учитывать не будем. Общепринято оценивать
прирост или уменьшение населения с помощью функций — коэффициента роэ/сдаемости
и показателя смертности, определенных следующим образом:
• P(t) — число рождений на единицу населения на единицу времени в момент времени t;
• 5(t) — число случаев смерти на единицу населения на единицу времени в момент
времени t.
Тогда количество рождений и случаев смерти, которые происходят в течение временного
интервала [t, t + At], выражаются (приблизительно) так:
рождений— /3(t) • P(t) • At, случаев смерти— 6(t) • P(t) • At.
Следовательно, изменение численности населении АР в течение временного интервала
[t, 14- At] длиной At равно
АР = {количество рождений} — {количество случаев смерти} «
« 0(t) • P(t) • At - 5(t) • P(t) • At,
128 Глава 2. Математические модели и численные методы
так что
^ »[/?(*)- S(t)\ P{t).
Ошибка в этой аппроксимации должна приближаться к нулю при Д £ —► 0, так что в результате
предельного перехода мы получаем дифференциальное уравнение
> ^ = (C-6)Р, A)
в котором мы пишем C = /?(£), 6 = S(t) иР = P(t) для краткости. Уравнение A) — общее
уравнение численности населения. Если /3 и S являются постоянными, уравнение A)
приводит к уравнению естественного роста с к = C — S. Но не исключено, что /3 и S являются
переменными функциями времени t. Количество рождений и показатель смертности не
всегда известны заранее; они могут зависеть от неизвестной функции P(t).
Пример 1
Предположим, что популяция аллигаторов первоначально насчитывает
100 особей и что ее показатель смертности 6 = 0 (так что ни один
аллигатор никогда не умирает). Пусть коэффициент рождаемости C =
= @,0005)Р. Таким образом, популяция увеличивается, причем
уравнение A) приводит к задаче Коши (задаче с начальными условиями)
dP
— = @,0005)Р2, Р@) = 100 .
at
(t измеряется в годах). Тогда после разделения переменных мы получаем
\j£dP = f @,0005) dt;
-I = @,0005)* +С.
Замена t = 0, Р = 100 дает С = —1/100, а затем мы легко решаем
полученное уравнение и находим
P(t)= 2000
20 -t
Пусть, например, РA0) = 2000/10 = 200, так что через 10 лет
количество аллигаторов в популяции удвоилось. Но поскольку Р —► +оо при
t —у 20, то реальный "демографический" взрыв происходит через 20 лет.
Действительно, поле направлений и интегральные кривые, показанные
на рис. 2.1.1, указывают, что демографический взрыв происходит всегда,
независимо от (положительного) начального значения численности по-
пуляцииР(О) = Ро. В частности, численность популяции неограниченно
возрастает за конечный период времени. ■
Модели ограниченного роста популяции и логистическое уравнение
Однако по мере увеличения численности населения коэффициент рождаемости
уменьшается. Точно так же коэффициент рождаемости уменьшается и в популяции мух в закрытом
2Л. Модели роста населения 129
@,100)
Рис. 2.1.1. Поле направлений и интегральные кривые
уравнения dP/dt = @,0005)Р2 из примера 1
контейнере. Причины могут быть самыми разными — от возрастания роли науки,
образования или усложнения культуры до ограниченности поставок продовольствия. Предположим,
например, что коэффициент рождаемости /3 —линейная убывающая функция, зависящая от
[численности населения Р, так что /3 = /?0 — РгР, где /Зо и /3\ — положительные константы.
[Если показатель смертности S = So остается постоянным, то уравнение A) принимает вид
dP
1ИНЫМИ словами,
— = (Р0-ръР-6о)Р;
dt
B)
|гдеа =/?о -50nb = /3i.
Если коэффициенты аиЬ оба положительны, то уравнение B) называют
логистическим уравнением. Ради удобства исследования зависимости численности населения P{i)
[от значений параметров в уравнении, полезно переписать логистическое уравнение в виде
^ = кР(М-Р),
C)
где к = Ь и М — а/Ь — константы.
Пример 2
В примере 4 из раздела 1.3 мы исследовали график численности
населения, которая удовлетворяет логистическому уравнению
dt
0,0004РA50 - Р) = 0,06Р - 0,0004Р2.
D)
130
Глава 2. Математические модели и численные методы
Чтобы решить это дифференциальное уравнение в символьном виде, мы
разделяем переменные и интегрируем. Мы получаем
dP
J:
>
0004 dt,
РA50 - Р)
1^0 ( Р + 150- Р ) dP= \ °'0004<й' [элементарные дроби]
In \Р\ - In |150 - Р\ = 0,06* + С,
^-р = ±есе0-06'= Ве0'0^ [гдеВ = ±ес].
Если мы подставим £ = ОиР = Ро^150в это последнее уравнение, мы
найдем В = Ро/A50 — Ро). Следовательно,
Р _ Рре0'06*
150 - Р ~ 150 - Р0'
Наконец, это уравнение просто решить относительно численности
населения
150Р0
P(t) =
Ро + A50 - Ро)е-°.°6'
E)
в момент времени t, считая известной начальную численность
населения Ро = Р@). На рис. 2.1.2 показано множество интегральных кривых,
соответствующих различным значениям начальной численности
населения в пределах от Р0 = 20 до Ро = 300. Обратите внимание, что все эти
интегральные кривые асимптотически приближаются к горизонтальной
линии Р = 150. Действительно, из уравнения E) непосредственно видно,
что Пт^-юо P(t) = 150 независимо от начального значения Ро > 0. ■
зоо.
240
180.
150<
120
= 300
и
^5
Рис. 2.1.2. Типичные интегральные кривые
логистического уравнения Р' = 0,06Р - 0,0004Р2
Модели ограниченного роста популяции и потенциальная емкость
экологической системы
Конечное ограничение численности популяции, рассмотренное в примере 2, характерно для
логистических моделей роста популяции. В задаче 32 мы просим, используя метод
решения примера 2, показать, что решением логистической задачи Коши (задачи с начальными
.2.1. Модели роста населения 131
условиями)
является функция
dP
— = кР(М-Р), Р@) = Ро
P(t) =
МРп
F)
G)
Р0 + (М - Р0)е~кШ'
Фактическое значение численности популяции животных положительно. Если
Ро = М9 то G) приводит к постоянному значению (константе), т. е. к "равновесной
численности" популяции P(t) = М. Иными словами, поведение популяции, подчиняющейся
логистической модели, зависит от того, какому из неравенств удовлетворяет ее численность:
О < Pq < М или Р0 > М. Если 0 < Р0 < М, то из F) и G) следует, что Р' > О и
P(t)
МР0
МРо
Pq 4- (М — Po)e~kMt Po -Ь {положительное число}
Однако, если Ро > М, то из F) и G) следует, что Р' < 0 и
рю =
мр0
МР0
<
>
МР0
МР0
Ро + (М — Р0)е~кШ Ро + {отрицательное число} Pq
М.
м.
В любом случае "положительное" или "отрицательное" число в знаменателе имеет
абсолютное значение меньшее, чем Ро, и из-за экспоненциального множителя стремится к 0 при
t -> +oo. Из этого следует, что
И» Pit) = ^
t-+oo W Po + О
м.
(8)
Таким образом, численность популяции, которая удовлетворяет логистическому
уравнению, не растет неограниченно, как при экспоненциальном росте, моделируемом
экспоненциальным уравнением Р; = кР. Вместо этого она приближается к конечной предельной
численности популяции М при t —> Н-оо. Как следует из вида типичных логистических
интегральных кривых на рис. 2.1.3, численность населения Р(£) устойчиво увеличивается
и приближается к М снизу, если 0 < Ро < М, но устойчиво уменьшается и приближается
Рис. 2.1.3. Типичные интегральные кривые
логистического уравнения Р' — кР(М — Р). Каждая интегральная
кривая, которая начинается ниже линии Р = М/2, имеет
точку перегиба на этой линии. (См. задачу 34)
132 Глава 2. Математические модели и численные методы
к М сверху, если Р0 > М. Иногда М называют потенциальной емкостью экологической
системы, полагая ее равной максимальной численности популяции, которую среда может
поддерживать длительное время.
Пример 3
Предположим, что в 1885 году численность населения некоторой
страны была равна 50 миллионам и возрастала со скоростью 750 000 человек
в год. Предположим также, что в 1940 году численность ее населения
была равна 100 миллионам и возрастала со скоростью 1 миллион в год.
Кроме того, предположим, что численность населения удовлетворяет
логистическому уравнению. Определим предельное значение численности
населения М и предскажем численность населения в 2000 году.
Решение Мы подставляем данные в уравнение C) и находим, что
0,75 = 50fc(M - 50), 1,00 = 100fc(M - 100).
Мы решаем полученную систему уравнений и находим М = 200 и к =
= 0,0001. Таким образом, численность населения рассматриваемой
страны ограничена 200 миллионами. При этих значениях М и к мы полагаем
t = 0 для 1940 года (когда Ро = Ю0)инаходим,что,согласноравенствуG)
численность населения в 2000 году будет равна
100 • 200
( } ~ 100 + B00 - 100)е-(°'0001)B00)F0)'
т. е. приблизительно 153,7 миллиона человек. ■
Историческая справка
Логистическое уравнение было введено около 1840 года бельгийским математиком и
демографом П. Ф. Ферхюльстом (P. F. VerhulstI как возможная модель прироста населения.
В следующих двух примерах мы сравниваем естественный рост, и логистическая модель
согласуется с данными переписи населения США, за XIX столетие, а затем мы сравниваем
прогнозы численности в течение XX столетия.
Пример 4
В США численность населения в 1800 году была равна 5,308 миллиона,
а в 1900 году было 76,212 миллиона человек. Если положить Р0 = 5,308
(и t = 0 в 1800 году) в модели естественного роста P(i)
ставить t = 100, Р = 76,212, мы получим, что
76,212 = 5,308е
100г
так что г =
1 76,212
100 П 5,308
P0ert и под-
t 0,026643.
1 Более точно, логистическое уравнение ввел Ферхюльст в 1838 году, им широко пользовался Лотка, а в 1920
году его переоткрыли американский эколог Перл (иногда встречается написание Пирл) и Рид. Часто оно
называется уравнением Ферхюлъста-Перла. Мне остается лишь добавить (для любителей копаться в толстых
книгах и Интернете), что встречаются также написания Ферхульст и Верхюльст, а потому не удивляйтесь,
если встретите логистическое уравнение под названием уравнение Верхюльста-Перла. Ни математики, ни
биологи, конечно же, не остались в долгу у любителей изящной словесности: пока последние упражнялись
в написании фамилии бельгийского математика и демографа, математики пытались придать этому уравнению
наиболее простой вид, ну а биологи — ввести в него необходимые им параметры. Поэтому вы можете встретить
логистическое уравнение в самых разных формах и с самыми разными параметрами. — Примеч. ред.
2.1. Модели роста населения 133
Пример 5
Таким образом, наша модель естественного роста американского
населения в течение XIX столетия будет содержать равенство
P(t) = E,308)е(°'026643)* (9)
(причем t измеряется в годах, а Р — в миллионах). Поскольку е0'026643 «
« 1,02700, средний прирост населения между 1800 и 1900 годами был
приблизительно равен 2,7% в год. ■
В США численность населения в 1850 году была равна 23,192 миллиона.
Если положить Ро = 5,308 и подставить данные t = 50, Р = 23,192
(для 1850 года) и t = 100, Р = 76,212 (для 1900 года) в логистическую
формулу (уравнение G)), мы получим следующие два уравнения:
E,308)М
5,308 + (М - 5,308)е0*м
E,308)М
5,308 + (М - 5,308)e-loofcM
23,192,
76,212
A0)
с двумя неизвестными к и М. Нелинейные системы, подобные
полученной, обычно решаются численно с помощью подходящей компьютерной
системы. Но с помощью удачного алгебраического фокуса (задача 36
в этом разделе) уравнения A0) могут быть решены вручную, и мы найдем
к = 0,000167716, М = 188,121. Подстановка этих значений в
уравнение G) дает логистическую модель
P(t) = ™&* о п
V ; 5,308 + A82,813)е-(°>031551)'' * ;
В таблице на рис. 2.1.4 сравниваются фактические данные для переписи
населения в США в 1800-1990 годах с предсказанными
экспоненциальной моделью роста (9) и логистической моделью A1). Обе модели
хорошо согласуются с данными для XIX столетия. Но экспоненциальная
модель заметно расходится от данных переписи в ранние десятилетия
XX столетия, тогда как логистическая модель остается достаточно
точной до 1940 года. К концу XX столетия экспоненциальная модель
дает значительно завышенный прогноз численности населения (более чем
миллиард в 2000 году) — тогда как логистическая модель дает несколько
заниженную численность населения.
Чтобы сопоставить данную модель с фактическими данными,
общепринято определять среднюю ошибку (модели) как квадратный корень
из среднего арифметического квадратов отдельных ошибок; средние
ошибки приведены в четвертом и шестом столбцах таблицы на рис. 2.1.4).
Используя только эти данные за 1800-1900 годы, в соответствии с этим
определением мы получили 3,162 для средней ошибки
экспоненциальной модели, в то время как средняя ошибка логистической модели равна
только 0,452. Следовательно, даже в 1900 году мы могли ожидать, что
логистическая модель предскажет прирост населения США в течение
XX столетия гораздо более точно, чем экспоненциальная модель. ■
134 Глава 2. Математические модели и численные методы
<-_ , ;- /- •>
Wm
1800
1810
1820
1830
1840
1850
1860
1870
1880
1890
1900
1910
1920
1930
1940
1950
1960
1970
1980
1990
2000
'■ ^ШШШ
население США
5,308
7,240
9,638
12,861
17,064
23,192
31,443
38,558
50,189
62,980
76,212
92,228
106,022
123,203
132,165
151,326
179,323
203,302
226,542
248,710
281,422
,-"^ЭВЙШ#: '-""
модель
5,308
6,929
9,044
11,805
15,409
20,113
26,253
34,268
44,730
58,387
76,212
99,479
129,849
169,492
221,237
288,780
376,943
492,023
642,236
838,308
1094,240
Ошибка
---'mm.'--
0,000
0,311
0,594
1,056
1,655
3,079
5,190
4,290
5,459
4,593
0,000
-7,251
-23,827
-46,289
-89,072
-137,454
-197,620
-288,721
-415,694
-589,598
-812,818
Логистическая
V'-'-*iii^-;-'-■■''
5,308
7,202
9,735
13,095
17,501
23,192
30,405
39,326
50,034
62,435
76,213
90,834
105,612
119,834
132,886
144,354
154,052
161,990
168,316
173,252
177,038
Ошибка
логистическая
0,000
0,038
-0,097
-0,234
-0,437
0,000
1,038
-0,768
0,155
0,545
-0,001
1,394
0,410
3,369
-0,721
6,972
25,271
41,312
58,226
76,458
104,384
Рис. 2.1,4. Сравнение моделей экспоненциального роста и логистических с данными
американских переписей населения (в миллионах)
Мораль примеров 4 и 5 состоит в том, что нельзя ожидать слишком много от моделей,
которые базируются на довольно скудной информации (пара-тройка данных). Большая часть
статистики как науки посвящена методам анализа больших "наборов данных" с целью
сформулировать полезную (и по возможности надежную) математическую модель.
Дополнительные приложения логистического уравнения
Теперь мы опишем некоторые ситуации, в которых логистическое уравнение является
удовлетворительной математической моделью.
1. Ограниченные ресурсы среды. Некоторая среда может поддерживать популяцию
численностью М особей. Тогда разумно ожидать, что прирост /3 — S (объединенный
показатель рождаемости и смертности) пропорционален М-Р, потому что мы
можем рассматривать М-Р как потенциал для дальнейшего роста. Тогда /3 — S =
= k(M — Р), так что
dP
^ = {C-5)P = kP{M-P).
2.1. Модели роста населения 135
Классический пример среды с ограниченными ресурсами — популяция плодовой
мушки в закрытом контейнере.
Конкуренция. Если коэффициент рождаемости C является константой, но
показатель смертности 8 пропорционален Р, так что S = аР, то
dP
— = (/?- аР)Р = кР(М - Р).
at
Это может быть разумной рабочей гипотезой при изучении каннибалистической
популяции, в которой все смертные случаи являются следствиями случайных
столкновений между особями. Конечно, обычно конкуренция между особями не настолько
смертельна, а ее эффекты обычно не носят столь драматичного характера.
Пропорциональность произведению. Пусть P(t) обозначает количество особей впо-
пуляции с постоянной численностью М, которые инфицированы некоторой
неизлечимой инфекционной болезнью. Болезнь распространяется случайно. Тогда P\t)
пропорционально произведению числа Р заболевших особей и числа здоровых
особей М-Р, поэтому dP/dt = кР(М — Р). Снова мы обнаруживаем, что
математическая модель включает логистическое уравнение. Математическое описание
распространения слухов среди населения численностью М индивидуумов идентично.
Пример 6
Предположим, что в момент времени t = 0 в городе с населением М =
= 100 тысяч человек некоторый слух услышали 10 тысяч человек. Через
1 неделю число P(t) тех, кто его услышал, увеличилось и стало равным
РA) = 20 тысячам. Предполагая, что P(t) удовлетворяет
логистическому уравнению, вычислите, когда слух услышит 80% населения города.
Решение Подставляя Р0 = 10иМ = 100 (тысяч) в равенство G), мы получаем
P{t) = 1™ A2)
Тогда замена t = 1,P = 20 дает уравнение
1000
20 =
10 + 90e-100fc'
которое легко решается относительно
e-ioofc = 4? такчто к = Л_ 1п | w о,008109.
ПриР(£) = 80 равенство A2) принимает вид
1000
80
10 + 90e-100fc*'
это уравнение мы решаем относительно е 100fct = ^. Из этого следует,
что 80% населения услышали слух тогда, когда
А In36 In36 А Ап
таким образом, — приблизительно через 4 недели и 3 дня. ■
136 Глава 2. Математические модели и численные методы
Судный День и исчезновение популяции
Рассмотрим популяцию численностью P(t) бесхитростных животных, в которой особи
женского пола для репродуктивных целей полагаются исключительно на случайные встречи
с особями мужского пола. Разумно ожидать, что вероятность таких встреч пропорциональна
произведению числа Р/2 особей мужского пола и числа особей женского пола Р/2,
следовательно, пропорциональна Р2. Мы поэтому предполагаем, что рождения происходят со
скоростью кР2 (в единицу времени, причем к—константа). Коэффициент рождаемости
(количество рождений /время/ численность популяции) тогда равен /3 = кР. Если показатель
смертности S является константой, то общее уравнение роста популяции A) принимает вид
дифференциального уравнения
dt
кР2 -5Р = кР{Р - М)
A3)
(гдеМ = 8/к > 0), которое рассматривается как математическая модель роста численности
популяции.
Обратите внимание, что правая часть в уравнении A3) имеет знак, противоположный
знаку правой части логистического уравнения C). Мы увидим, что постоянная М теперь
представляет собой пороговое значение численности популяции, так как поведение
численности популяции в будущем критически зависит от того, является ли начальное значение
численности популяции Ро меньшим или большим, чем М.
Пример 7
Рассмотрим популяцию животных численностью Р(£), которая модели
руется уравнением
dP
dt
0,0004Р(Р - 150) = 0,0004Р2 - 0,06Р.
A4)
Мы хотим найти P(t) если (а) Р@) = 200; (Ь) Р@) = 100.
Решение Чтобы решить уравнение A4), мы отделяем переменные и интегрируем.
Мы получаем
dP
J:
,0004 dt,
Р(Р -150)" J °'С
efi ( ~ р_ icn ) dp =\ 0,0004 dt, [элементарные дроби]
150
In \P\ - In \P - 150| = -0,06* + С,
Р ±есе-°'ш = Ве-°'ш [где£? = ±ес]. A5)
Р-150
(а) Замена t = 0 и Р = 200 в A5) дает В = 4. При этом значении В мы
решаем уравнение A5) и получаем
600е-°'06'
Р(!) =
4e-o,06t _ i'
(i6)
2.1. Модели роста населения 137
Заметьте, что при увеличении £, когда оно стремится к Т = —^ « 23,105,
положительный знаменатель справа в A6) уменьшается и стремится к 0.
Следовательно, P(t) —> +оо при t —► Т~. Это Судный День — в этот день
происходит реальный демографический взрыв.
(Ь) Подстановка £ = ОиР = 100 в A5) дает Б = —2. При этом значении
В мы решаем уравнение A5) и находим
р(*) =
ЗООе
-0,06t
300
2e-o,06t + ! 2 + е°>06*'
A7)
Заметьте, что, при неограниченном увеличении t положительный
знаменатель в правой части равенства A7) стремится к +оо. Следовательно,
P(i) —» 0 при t —► +оо. Это — состояние окончательного исчезновениям
Таким образом, популяция в примере 7 или взрывается, или подвергается другой
опасности — угрозе исчезновения, в зависимости от того, превышает ли ее начальная численность
пороговое значение М = 150. Нечто подобное этому явлению иногда наблюдается в
некоторых популяциях животных, таких как популяции аллигаторов в некоторых штатах на Юге
Соединенных Штатов.
На рис. 2.1.5 показаны типичные интегральные кривые, которые иллюстрируют эти две
возможности для численности популяции P(t)9 удовлетворяющей уравнению A3). Если
Ро = М (точно равно!), тогда численность популяции остается постоянной. Однако это
равновесное положение очень непостоянно. Если Ро превышает М (даже немного), то P(t)
быстро и неограниченно увеличивается, ну а если начальное (положительное) значение
численности популяции меньше чем М (хотя бы и немного), то оно уменьшается (более
постепенно) и стремится к нулю при t —► +оо. См. задачу 33.
Рис. 2.1.5. Типичные интегральные кривые уравнения
Р' — кР(Р — М), моделирующего взрыв численности
популяции или ее исчезновение
2.1. Задачи
шделите переменные и используйте разложение на элементарные дроби, чтобы решить задачи
i (задачи с начальными условиями) в задачах 1-8. Используйте точное решение или машинно-
нерируемое поле направлений, чтобы сделать набросок графиков нескольких решений данного
реренциалъного уравнения, и выделите указанное частное решение.
138
Глава 2. Математические модели и численные методы
1. Щ = х - х2, ж@) =2 2. ^ = 10* - х2, ж@) = 1
3. 2Ё = 1 _ х\ ф) = з 4. ^ = 9 - 4а;2, х@) = 0
5. ^ = ЗяE - х)9 х@) = 8 6. ^ = Зх(х - 5), я?@) = 2
at at
7. ^ = 4жG - ж), х@) = 11 8. $ = 7ж(а; - 13), ж@) = 17
ас at
9. Скорость изменения численности популяции кроликов Р пропорциональна квадратному корню
Р. В момент времени t = 0 (месяцы) популяция кроликов насчитывает 100 особей и
увеличивается со скоростью 20 кроликов в месяц. Сколько кроликов будет через один год?
10. Предположим, что популяция рыб численностью P(t) в озере атакована болезнью в момент
времени t = 0, так что в итоге воспроизводство рыб прекращается (так что коэффициент
рождаемости равен /3 — 0), а показатель смертности (количество смертей в неделю, приходящихся
на одну рыбу) S после этого пропорционален 1/л/Р. Если первоначально в озере было 900
рыб, а через 6 недель осталась 441 рыба, то через какое время в озере исчезнет вся рыба?
11. Предположим, что в некотором озере показатели рождения и смертности рыбы /3 и 6 оба
обратно пропорциональны квадратному корню из ее численности у/Р. (а) Покажите, что
P(t) = (|fet + v^J,
где к — константа. (Ь) Пусть Л> = 100 и через 6 месяцев в озере осталось 169 рыб. Сколько
рыб там будет через 1 год?
12. Скорость изменения численности Р популяции аллигаторов в болоте пропорциональна
квадрату Р. В болоте в 1988 году водилась дюжина аллигаторов, а в 1998 году — две дюжины. Когда
в болоте будет четыре дюжины аллигаторов? Что случится после этого?
13. Рассмотрим плодовитую породу кроликов, у которых показатели рождения и смертности /3 и S
пропорциональны численности популяции кроликов Р = P(t), причем /3 > S. (а) Покажите,
что
•Р(^) = ~л ттпч гДе & — константа.
1 — kPot
Обратите внимание, что P{t) —► + оо при t —► \/(кРо). Это — Судный День. (Ь) Предположим,
что Ро = 6 и что через десять месяцев будет девять кроликов. Когда наступит Судный День?
14. Решите проблему, поставленную в части (а) задачи 13, в случае /3 < S. Что теперь случается
с популяцией кроликов в конечном счете?
15. Численность популяции P(t) удовлетворяет логистическому уравнению dP/dt — аР—ЬР2, где
В = аР — число рождений и D = ЬР2 — число смертных случаев в единицу времени. Пусть
начальная численность популяции равна Р@) = Ро и Во — количество рождений в месяц,
a Do — количество смертей в месяц в момент времени t = 0. Покажите, что численность
популяции ограничена числом М — BoPo/Dq.
16. Популяция кроликов численностью P(t) удовлетворяет логистическому уравнению (как в
задаче 15). Если начальная численность популяции равна 120 кроликам и в месяц рождается 8
кроликов, а 6 умирает в месяц в момент времени t = 0, то через сколько месяцев Р(£) будет
равно 95% граничного значения М численности популяции?
17. Численность популяции кроликов P(t) удовлетворяет логистическому уравнению (как в
задаче 15). Если начальная численность популяции равна 240 кроликам и в месяц рождается 9
кроликов, а 12 умирает в месяц в момент времени t = 0, то через сколько месяцев Р(£) будет
равно 105% граничного значения М численности популяции?
2.1. Модели роста населения 139
18. Численность популяции P(t) удовлетворяет уравнению взрыва или исчезновения dP/dt =
= аР2 — ЬР, где В = аР2 — скорость рождения и D = ЬР — скорость смертных случаев.
Пусть начальная численность популяции равна Р@) = Pq и происходит Во рождений в месяц,
и Do смертей в месяц в момент времени t = 0. Покажите, что пороговое значение численности
популяции равно М = DoPo/Bq.
19. Численность P(t) популяции аллигаторов удовлетворяет уравнению исчезновения или взрыва
(как в задаче 18). Пусть начальная численность популяции равна 100 аллигаторам и в
месяц происходит 10 рождений и 9 случаев смерти в момент времени t = 0. Сколько месяцев
потребуется, чтобы P(t) в 10 раз превысила пороговое значение численности популяции М?
20. Численность P(t) популяции аллигаторов удовлетворяет уравнению исчезновения или взрыва
(как в задаче 18). Пусть начальная численность популяции равна 110 аллигаторам и в месяц
происходит 11 рождений и 12 случаев смерти в момент времени t = 0. Сколько месяцев
потребуется, чтобы P(t) достигла 10% от порогового значения численности популяции Ml
21. Предположим, что численность P(t) населения некоторой страны удовлетворяет
дифференциальному уравнению dP/dt = fcPB00 — Р), причем к — константа. Пусть в 1940 году
численность населения была равна 100 миллионам и возрастала тогда со скоростью 1 миллион
в год. Предскажите численность населения этой страны в 2000 году.
22. Предположим, что в момент времени t = 0 половина "логистического" населения 100000
человек услышала некоторый слух и что численность тех, кто его услышал, в этот момент
увеличивалось со скоростью 1000 человек в день. Когда этот слух узнает 80% населения?
(Указание. Найдите значение fc, подставляя Р@) и -Р'(О) в логистическое уравнение C).)
23. При растворении соли KNO3 в метаноле количество x(t) граммов соли в растворе через t
секунд удовлетворяет дифференциальному уравнению dx/dt = 0,8а: — 0,004а:2.
(a) Какое максимальное количество соли будет растворено в метаноле?
(b) Пусть х = 50 при t = 0. Сколько потребуется времени, чтобы растворить еще 50 г соли?
24. Предположим, что некоторая община насчитывает 15 000 человек, которые восприимчивы
к синдрому Мичода (Michaud's syndrome), инфекционной болезни. В момент времени t = 0
количество N(t) людей, у которых обнаружился синдром Мичода, равно 5000 и увеличивается
со скоростью 500 в день. Предположите, что N'(t) пропорционально произведению чисел тех,
кто заразился болезнью и тех, кто не заболел. Через какое время синдром Мичода обнаружится
еще у 5000 человек?
25. Данные на рис. 2.1.6 даются для численности населения P(t), которая удовлетворяет
логистическому уравнению C).
Гед(,^:> ... ..„■•#; (миллионы)
1924 24,63
1925 25,00
1926 25,38
1974 47,04
1975 47,54
1976 48,04
Рис. 2.1.6. Данные по численности населения для
задачи 25
140 Глава 2. Математические модели и численные методы
(a) Чему равна граничная численность населения Ml {Указание. Используйте аппроксимацию
, _ P(t + h)-P(t-h)
У () 2h
при h = 1, чтобы вычислить значения P'(t) при Р = 25,00 и Р = 47,54. Затем подставьте
эти значения в логистическое уравнение и решите его относительно к и М.)
(b) Используя значения к и М, найденные в части (а), определите, когда Р = 75. (Указание.
Положите t = 0 в 1925 году.)
26. Численность P(t) популяции маленьких грызунов имеет коэффициент рождаемости /3 = @,001)Р
(рождений в месяц на одного грызуна) и постоянный показатель смертности 8. Если Р@) = 100
и Р'@) = 8, через сколько месяцев численность популяции удвоится, т.е. станет равной 200
грызунам? (Указание. Сначала найдите значение S.)
27. Численность P(t) популяции животных имеет постоянный показатель смертности 5 — 0,01
(смертного случая на животное в месяц) и с коэффициентом рождаемости /3 пропорциональным
Р. Предположим, что Р@) = 200 и Р'@) = 2. (а) Когда Р = 1000? (Ь) Когда наступит Судный
День?
28. Предположим, что количество аллигаторов x(t) (t выражено в месяцах) в болоте удовлетворяет
дифференциальному уравнению dP/dt = 0,0001х2 — 0,01х.
(a) Пусть первоначально в болоте есть 25 аллигаторов. Решите это дифференциальное
уравнение и определите, что случится с популяцией аллигаторов в конечном счете.
(b) Сделайте то же, что и в части (а), но предположите, что первоначально в болоте есть 150
аллигаторов.
29. В течение периода с 1790 до 1930 года население США P(t) (t измеряется в годах) возросло от
3,9 миллиона до 123,2 миллиона человек. В течение этого периода P(t) было близко к решению
задачи Коши (задачи с начальными условиями)
dP
— = 0,03135Р - 0,0001489Р2, Р@) = 3,9.
at
(a) Какая численность населения будет в 1930 году в соответствии с этим логистическим
уравнением?
(b) Какое ограничение на численность населения налагает это уравнение?
(c) Действительно ли это логистическое уравнение продолжало и после 1930 года точно
моделировать численность населения США?
[Эта задача базируется на вычислениях, которые провел Ферхюльст (Verhulst) в 1845 году. Он
использовал данные по численности населения США в 1790-1840 годах, чтобы предсказать
точно численность американского населения до 1930 года (через длительное время после его
собственной смерти, конечно).]
30. Опухоль может рассматриваться как популяция бесконтрольно размножающихся клеток.
Опытным путем найдено, что "коэффициент рождаемости" клеток опухоли уменьшается по
экспоненте со временем, так, что j3(t) = /3oe~at (где а и (Зо — положительные константы), и,
следовательно,
ИР
?£ = C0e-atP, Р@) = Ро-
Решите эту задачу Коши (задачу с начальными условиями), чтобы найти
P(t) = P0exp(^(l-e-(Xt)Y
Заметьте, что численность популяции P(t) приближается к конечному ограничению
Ро ехр (Ро/а) при t —► +оо.
2.1. Модели роста населения 141
31. Предположите, что опухоль (задача 30) в момент времени t = 0 насчитывает Ро = Ю6 клеток
и что P(t) в этот момент увеличивается со скоростью 3 х 105 клеток в месяц. После 6 месяцев
опухоль удвоилась (в размере и в числе клеток). Найдите численное значение а, а затем найдите
граничное количество клеток опухоли.
32. Получите решение
P(t) = MPo
К) Ро + (М - Po)e~kMt
логистической задачи Коши (задачи с начальными условиями) Р' = кР(М — Р), Р@) = Ро.
Выясните, как результат зависит от выполнения условия 0 < Ро < М или Ро > М.
33. (а) Получите решение
P(t)= MPo
W Ро + (М - P0)ekMt
задачи Коши (задачи с начальными урловиями) (типа взрыва или исчезновения) Р' =
= кР(Р - М), Р@) = Ро.
(Ь) Как поведение P(t) при увеличении t зависит от выполнения условия 0 < Ро < М или
Ро>М?
34. Пусть Р(£) удовлетворяет логистическому уравнению C). Используя правило
дифференцирования сложной функции, покажите, что
P"{t) = 2к2Р(Р - \М)(Р - М).
Заключите, что Р" > 0, если 0 < Р < \М\ Р" = 0, если Р = \М\ Р" < 0, если \М <
< Р < М; Р" > 0, если Р > М. В частности, из этого следует, что если интегральная кривая
пересекает прямую линию Р = |М, то точка пересечения является точкой перегиба, и потому
такая интегральная кривая напоминает нижние кривые в форме буквы S на рис. 2.1.3.
35. Пусть две функции численности популяции Р\(€) и Рг(£) удовлетворяют логистическому
уравнению с тем же самым ограничением численности популяции М? но с различными значениями
к\ и къ константы к в уравнении C). Пусть к\ < fe. Численность какой популяции
приближается к М быстрее? Вы можете использовать геометрические соображения, исследуя поля
направлений (особенно это упрощает решение, если доступно соответствующее программное
обеспечение), или найти ответ, анализируя решение, данное равенством G), в символьном
виде, или даже найти ответ с помощью вычислений, представив решение в численном виде, т. е.
вычислив значения решения для последовательных значений t.
36. Чтобы решить оба уравнения A0) и найти значения к и М, начните с решения первого
уравнения относительно неизвестного х = е~50кМ и второго уравнения относительно х2 = e-100fcM#
После приравнивания двух полученных выражений для х2 (выражающих одну и ту же
величину через М), вы получите уравнение; которое легко решить относительно М. Значение М
теперь известно, и потому любое из первоначальных уравнений легко решить относительно к.
Эта методика может использоваться, чтобы "подогнать" логистическое уравнение под любые
три известных значения численности населения Ро, Р\ и Рг, полученных через одинаковые
периоды времени, т. е. в том случае, когда можно считать, что подсчет (перепись) выполнялся
в моменты времени to = 0, t\ и ti = 2t\.
37. Используйте метод задачи 36, чтобы подогнать логистическое уравнение под фактические
данные численности населения США (см. рис. 2.1.4) в 1850, 1900 и 1950 годах. Решите полученное
логистическое уравнение, и сравните предсказанные и фактические значения численности
населения в 1990 и 2000 гг.
38. Подгоните логистическое уравнение под фактические данные численности населения США (см.
рис. 2.1.4) в 1900, 1930 и 1960 годах. Решите полученное логистическое уравнение, и сравните
предсказанные и фактические значения численности населения в 1980, 1990 и 2000 годах.
142 Глава 2. Математические модели и численные методы
39. Показатели рождения и смертности в популяции животных обычно не постоянны, а
изменяются периодически в зависимости от сезона. Найдите P(t) , если численность популяции Р
удовлетворяет дифференциальному уравнению
—- = (k + bcos27rt)P,
at
где t выражено в годах, а к и Ъ — положительные константы. Таким образом, функция скорости
роста r(t) = к -Ь 6cos27rt изменяется периодически — она колеблется около своего среднего
значения к. Нарисуйте график, который показывает отклонение численности такой популяции
от популяции, которая имеет то же самое начальное значение численности Ро, но удовлетворяет
уравнению естественного роста Р' = кР (к — та же самая константа). Как будут отличаться
численности этих двух популяций многие годы спустя?
2.1. Приложение. Логистическая модель роста
населения
Эти исследования имеют целью приспособить логистическую модель к фактическим
данным численности населения. Таким образом мы хотим определить числовые постоянные
аиЬ так, чтобы решение P(t) задачи Коши (задачи с начальными условиями)
dP
— = аР + ЪР2, Р@) = Ро A)
приблизительно соответствовало известным значениям Ро, Pi,..., Рп численности
населения в моменты времени to = 0,11,..., tn. Если мы перепишем уравнение A) (логистическое
уравнение с кМ = аик — —6) в форме
p-di=a+bP> B)
то увидим, что все точки
(Р{и),тШ)' * = М»2»"-.п,
должны лежать на прямой линии, которая на оси у отсекает отрезок а и имеет наклон Ь (как
определено функцией Р в правой части уравнения B)).
Это позволяет найти аиЬ. Если мы можем определить приближенные значения
производных Р{, Р-2> •. •, соответствующих заданным значениям численности населения, то мы
сможем выполнить следующий план.
• Сначала начертим точки (Pi, Р[/Р\), (Рг, Р£ /Р2),.. • на миллиметровке с
горизонтальной осью Р.
• Затем проведем прямую линию, которая проходит как можно ближе к этим точкам.
• Наконец, найдем отрезок а, отсекаемый на координатной оси у этой гфямой линией, и ее
наклон 6.
Но как найти необходимые значения производной P\t) (пока еще) неизвестной функции
Р? Кажется, проще всего использовать аппроксимацию
Р< = p*+i-p*-i? C)
£г+1 — U-1
2.1. Модели роста населения 143
Й+ьЛ+i)
Наклон: Р'(^)
'/-1
'/
h+i
Рис. 2.1,7. Аппроксимация производной P'(U) с помощью
Pi+l — P%-\
симметричной разности
"i-
+1
U-i
показанную на рис. 2.1.7. Например, если взять г = 0, соответствующее 1790 году, то данные
переписи населения США, приведенные на рис. 2.1.8, дают
н =
Р2 - Р0 7,240 - 3,929
h — to
для наклона в точке (ti, Pi) на 1800 год.
20
■ 0,166
Исследование А. Используя уравнение C), проверьте значения наклона, приведенные
в заключительном столбце таблицы на рис. 2.1.8, а затем начертите точки (Pi, Р[/Р{),...,
Гад
1790
1800
1810
1820
1830
1840
1850
1860
1870
1880
1890
1900
1910
, 4 -
0
1
2
3
4
5
6
7
8
9
10
11
12
, ';'*€. .л;;.
-10
0
10
20
30
40
50
60
70
80
90
100
ПО
3,929
5,308
7,240
9,638
12,861
17,064
23,192
31,443
38,558
50,189
62,980
76,212
92,228
штттттттщтщтт
0,166
0,217
0,281
0,371
0,517
0,719
0,768
0,937
1,221
1,301
1,462
Рис. 2.1.8. Данные по численности населения
Соединенных Штатов Америки (в млн. чел.) и приблизительные
значения наклона
144 Глава 2. Математические модели и численные методы
0.04
0.03
0.02
0.01 Ь
Год
г- :""" »• "te4^*- ": : Ч
0 20 40 60 80 100
Р
Рис. 2.1.9. Данные по численности
населения США с 1800 года до 1900 года
и приближающая их прямая линия
1960
1965
1970
1975
1980
1985
1990
1995
2000
Мировое
население
(млрд* чел.)
3,049
3,358
3,721
4,103
4,473
4,882
5,249
5,679
6,127
Рис. 2.1.10. Данные по
численности мирового населения
(Рц, Р{г /Рц), обозначенные звездочками на рис. 2.1.9. Если есть подходящий графический
калькулятор, электронная таблица или компьютерная программа, используйте их, чтобы
найти прямую линию у = а + ЪР с уравнением B), которая лучше всего аппроксимирует эти
данные, т. е. ближе всего проходит к полученным точкам. Если хотите, нарисуйте прямую
линию вашим собственным способом, лишь бы она как можно ближе подходила к этим
точкам, а затем измерьте отрезок а, отсекаемый на координатной оси, и вычислите наклон
Ь любым доступным вам способом. Затем решите логистическое уравнение A) с этими
числовыми параметрами, принимая, что t = 0 соответствует 1800 году. Наконец, сравните
предсказание для XX столетия с фактическими данными по численности населения США,
приведенными на рис. 2.1.4.
Исследование В. Повторите исследование А9 но возьмите t = 0 для 1900 года и
используйте только данные по численности населения в XX столетии. Получится ли лучшая
аппроксимация для численности населения США для последних десятилетий XX столетия?
Исследование С. Смоделируйте подобным образом данные о численности населения
мира, приведенные на рис. 2.1.10. Департамент населения (Population Division) Организации
Объединенных Наций предсказывает численность мирового населения на уровне 8,177
миллиарда в 2025 году. А какую численность предсказываете вы?
2.2. Равновесные решения и устойчивость
В предыдущих разделах мы часто использовали решения дифференциальных уравнений
в явном виде, чтобы ответить на конкретные вопросы, связанные с вычислением числовых
значений. Но даже если для данного дифференциального уравнения трудно или невозможно
найти решение в явном виде, часто можно извлечь качественную информацию об общих
2.2. Равновесные решения и устойчивость 145
свойствах его решений. Например, иногда мы можем установить, что каждое решение x{i)
возрастает неограниченно при t —► +00, или стремится к конечному пределу, или является
периодической функцией t. В этом разделе мы рассмотрим (главным образом простые)
дифференциальные уравнения, которые могут быть решены явно, но постараемся ответить на
самые важные качественные вопросы, на которые можно иногда ответить для тех уравнений,
для которых трудно или невозможно найти решение в явном виде.
Пример 1
Пусть x(t) обозначает температуру физического тела, причем его
начальная температура х@) = xq. В момент времени t = О это тело помещается
в среду с постоянной температурой А. Принимая во внимание закон
Ньютона для охлаждения тела,
Tt=~k{x
А) (константа к > 0),
о)
мы легко решаем (разделением переменных) это уравнение и находим
явное решение
x(t) = A+(xo-A)e~kt.
Из этого немедленно следует, что
lim x(t) = A,
B)
так что температура тела приближается к температуре окружающей среды
(что интуитивно очевидно). Обратите внимание, что постоянная
функция x(t) = А — решение уравнения A); она соответствует температуре
тела, когда оно находится в тепловом равновесии с окружающей средой.
На рис. 2.2.1 предел в B) значит, что каждая другая интегральная
кривая асимптотически приближается к равновесной интегральной кривой
х = А при t —» +00. ■
Замечание. Поведение решений уравнения A) кратко подытожено в фазовой
диаграмме на рис. 2.2.2. Правая часть f(x) = — к(х — А) = к(А — х) положительна, если
*'>0
*'<0
х<А
х = А
х>А
Рис. 2.2.1. Типичные интегральные
кривые уравнения, описывающего закон
Ньютона охлаждения физического тела,
dx/dt = — к(х — А)
Рис. 2.2.2. Фазовая диаграмма
уравнения dx/dt = f(x) = к(А — х)
146 Глава 2. Математические модели и численные методы
х < А9 и отрицательна если х > А. Это наблюдение соответствует тому факту, что
решения, начинающиеся выше линии х = А, и те, которые начинаются ниже ее, приближаются
к граничному решению x(t) = А при увеличении t (как обозначено стрелками) ■
В разделе 2.1 мы ввели общее уравнение для численности населения
где /3 и 5 — показатели рождения и смертности соответственно, т. е. выражают количество
случаев рождения или смерти на одного человека в единицу времени. Очевидный
интерес представляет вопрос, ограничена или неограничена численность населения x(t) при
t —» +оо. Во многих поселениях, подчиняющихся логистическому закону, и в поселениях
типа взрыва или исчезновения из раздела 2.1 показатели рождения и смертности
представляют собой известные функции х. Тогда уравнение C) принимает вид
!-/(.). D)
Это автономное дифференциальное уравнение первого порядка, в которое независимая
переменная t не входит явно. Как и в примере 1, решения уравнения f(x) = О играют важную
роль и называются положениями равновесия, точками равновесия, стационарными
точками, точками покоя, неподвижными точками, особыми точками или
критическими точками автономного дифференциального уравнения dx/dt = f(x).
Если х — с — точка равновесия уравнения D), то дифференциальное уравнение имеет
постоянное решение x(t) = с. Постоянное решение дифференциального уравнения
иногда называют равновесным решением (можно думать о населении, которое остается
постоянным, потому что оно находится в "равновесии" с его средой). Таким образом точка
равновесия х = с, т. е. число, соответствующее равновесному решению x(t) = с, может
рассматриваться как постоянная функция (константа).
Пример 2 показывает„что, зная точки равновесия автономного уравнения первого
порядка, можно описать качественное поведение решений уравнения при увеличении t.
Пример 2
Рассмотрим логистическое дифференциальное уравнение
^ = кх(М - х) E)
dt
(с к > 0 и М > 0). Оно имеет две точки равновесия — решения х = О
и х = М уравнения
f(x) = кх(М -х)=0.
В разделе 2.1 мы обсуждали решение логистического уравнения
/.ч Мхр
XW~xo + (M-*0)e-^' W
удовлетворяющее начальному условию х@) = xq. Обратите внимание,
что начальные значения xq = 0 и хо = М дают равновесные решения
x(t) = 0 и x(t) = М уравнения E).
2.2. Равновесные решения и устойчивость 147
В разделе 2.1 мы видели, что если хо > О, то x(t) —> М при
t —► +оо. Но если хо < О, то знаменатель в уравнении F) первоначально
положителен, но обращается в нуль, когда
1 , М — xn
км —хо
Поскольку в этом случае числитель в F) отрицателен, из этого
следует, что
lim x(t) = — оо, если хо < 0.
t-+t~
Из этого следует, что интегральные кривые логистического уравнения E)
выглядят так, как показано на рис. 2.2.3. ■
х = м
Рис. 2.2.3. Типичные
интегральные кривые логистического
уравнения dx/dt = кх(М — х)
Устойчивость точек равновесия
Рис. 2.2.3 иллюстрирует понятие (концепцию) устойчивости. Говорят, что точка
равновесия х = с автономного уравнения первого порядка является устойчивой, если из того, что
начальное значение хо достаточно близко к с, следует, что x(t) остается близким к с для
всех t > 0. Более точно, точка равновесия с устойчива, если для каждого е > 0, существует
6 > 0, такое, что из
\xq — с\ < S следует, что \x(t) — с\ < е
G)
для всех t > 0. Точка равновесия х = с называется неустойчивой, если она не является
устойчивой.
На рис. 2.2.4 показан "общий вид" интегральных кривых логистического уравнения
при к = 1 и М = 4, Обратите внимание, что полоса 3,5 < х < 4,5, которая содержит
устойчивую равновесную кривую х = 4, действует подобно стоку, — все входящие в нее
интегральные кривые (при движении точки по кривой слева направо) остаются внутри ее.
А вот полоса —0,5 < х < 0,5, содержащая неустойчивую интегральную кривую х = О,
действует подобно источнику, из которого бьют струи,—интегральные кривые разбегаются
148 Глава 2. Математические модели и численные методы
из этой полосы (и не возвращаются в нее), как струи из фонтана. Таким образом, предыдущая
точка равновесия ж = М устойчива, а точка равновесия х = 0 неустойчива.
Замечание 1. Мы можем судить о поведении решений логистического уравнения E)
по фазовой диаграмме, показанной на рис. 2.2.5, если известны начальные значения.
Действительно, из фазовой диаграммы видно, что x(t) —► М при t —» +оо, если х$> М или
О < #о < М, тогда как x(t) —» —оо при увеличении t, если #о < 0. То, что М является
устойчивой точкой равновесия, важно, например, если мы желаем провести эксперимент
с популяцией из М бактерий. Невозможно отсчитать точно М бактерий, если М достаточно
большое, но численность популяции приблизится к М при увеличении t независимо от ее
первоначального (положительного) значения.
7
6
5
4
3
н 2
1
0
-1
-2
~3tf 2 4 6 8 10 12
t
Рис. 2.2.4. Интегральные кривые
уравнения dx/dt = Ах — х2: сток
и источник
b^j ,T,t, ..Л—Zi—,;^ ...г,^
х'<0
х'>0
х'<0
х=0 х=М
Неустойчивая Устойчивая
Рис. 2.2.5. Фазовая диаграмма
логистического уравнения dx/dt — /(#) =
= кх(М — х)
Замечание 2.
нения
С устойчивостью граничного решения М = а/Ъ логистического урав-
dx
~dt
ах — bx2
(8)
связана "предсказуемость" фактической численности популяции М. Едва ли коэффициенты
а и Ь известны точно для реальной популяции. Но если для них известны хорошие
приближения а* и Ь* — в результате эмпирических исследований, — то приблизительная граничная
численность популяции М* = а*/Ь* будет близка к фактической граничной численности
популяции М = а/b. Так что значение М (граничная численность популяции,
предсказанная по логистическому уравнение) является не только устойчивой точкой равновесия
дифференциального уравнения; это значение также "устойчиво" относительно малых
возмущений постоянных коэффициентов уравнения. (Обратите внимание, что одно из этих
двух утверждений относится к возмущениям (изменениям) начального значение #о; другое
же относится к возмущениям коэффициентов а и Ь). ■
Пример 3
Рассмотрим теперь уравнение взрыва или исчезновения
— = кх(х - М)
at
(9)
2.2. Равновесные решения и устойчивость 149
(уравнение A0)) из раздела 2.1. Подобно логистическому уравнению, оно
имеет две точки равновесия ж = Оиж = М, соответствующие
равновесным решениям x(t) = 0 и x(t) = М. Согласно задаче 33 из раздела 2.1, его
решение при х@) — xq дается формулой
Мх0
x(t) =
Xq + (М - х0)екШ
A0)
(иэто решение отличаетсятолькознакомотрешениялогистического)фав-
нения F)). Если xq < М, то (поскольку коэффициент при показательной
функции в знаменателе положителен), из уравнения A0) немедленно
следует, что x(t) —► 0 при t —► +оо. Но если #о > М, то знаменатель в A0)
первоначально положителен, но обращается в нуль при
t = h
1 , #о
кМ xq —
М
>0.
Поскольку в этом случае числитель в A0) положителен, из этого следует,
что
lim x(t) = +оо, если xq > М.
Поэтому интегральные кривые уравнения взрыва или исчезновения (9)
выглядят так, как показано на рис. 2.2.6. Узкая полоса около равновесной
кривой х = 0 (как на рис. 2.2.4) служит стоком, в то время как полоса
около интегральной кривой х = М служит источником для решений.
Поведение решений уравнения (9) подытожено фазовой диаграммой на
рис. 2.2.7, из которой видно, что точка равновесиях = 0 устойчива, аточка
равновесия х = М неустойчива. ■
х = 0
х'>0
х'<0
х'>0
Рис. 2.2.6. Типичные интегральные
кривые уравнения взрыва или
исчезновения dx/dt = кх{х — М)
х = 0 Х = М
Устойчивая Неустойчивая
Рис. 2.2.7. Фазовая диаграмма для
уравнения взрыва или исчезновения
dx/dt = f(x) = кх(х - М)
Сбор урожая в логистической популяции
Автономное дифференциальное уравнение
— = ах — ох — h
dt
(И)
150 Глава 2. Математические модели и численные методы
(где а, Ъ и h положительны) можно применить для описания логистической популяции
со сбором урожая. Например, можно рассматривать популяцию рыб в озере, из которого
ежегодно вылавливают h рыб.
Пример 4
Давайте перепишем уравнение A1) в форме
-f = kx(M-x)-h, A2)
at
в котором граничная численность популяции равна М в случае h = 0, т. е.
вслучаеотсутствиясбораурожая.Принимаятеперь,что/г > 0, мы можем
решить квадратное уравнение —кх2 + кМх — h = 0 и найти следующие
две точки равновесия:
н,м=ш±ШШЕШ^_{м±^гт-т) A3)
Принимая предположение о том, что скорость сбора урожая h является
достаточно малой, а именно, что 4/г < кМ2, мы получим, что оба корня Н
и N вещественны, причем 0 < Н < N < М. Тогда мы можем переписать
уравнение A2) в форме
— = k(N-x)(x-H). A4)
Однако количество точек равновесия уравнения может резко измениться
при изменении значения параметра. В задаче 24 мы просим решить это
уравнение и найти его решение в виде
,. _ N(xo-H)-H(xo-N)e-k(N-H»
W ~ (xo - Я) - (х0 - N)e-HN-H)t \lD>
в зависимости от начального значения х @) = xq.
Обратите внимание, что показатель степени —k(N — H)t
отрицателен для t > 0. Если xq > N, то все коэффициенты (выражения в круглых
скобках) в уравнении A5) положительны; из этого следует, что
если xq > N, - то x(t) —► N при t —► +оо. A6)
В задаче 25 мы просим вывести из уравнения A5) также следующее
утверждение:
если Н < xq < N, то x(t) —► N при t —¥ +оо, A7)
тогда как
если xq < iJ, то x(t) —у —оо при t-^ti A8)
для некоторого положительного значения £ь которое зависит от xq. Из
этого следует, что интегральные кривые уравнения A2) — все еще при
предположении, что Ah < fcM2—выглядят так, как показано на рис. 2.2.8.
(Вы можете представить сток вокруг линии х = N и источник вокруг
2.2. Равновесные решения и устойчивость
151
x = N
х = 0
х'<0
х'>0
х'<0
х = Н
Неустойчивая
x = N
Устойчивая
Рис. 2.2.8. Типичные интегральные
кривые логистического уравнения со сбором
урожая dx/dt = k(N — х)(х — Н)
Рис. 2.2.9. Фазовая диаграмма для
логистического уравнения со сбором урожая
dx/dt = /(яг) = k(N -x)(x- H)
линии х = HI) Таким образом, постоянное решение x(t) = N — это
равновесное граничное решение, тогда как x(t) = H—пороговое решение, —
которое отделяет различные поведения популяции; численность
популяции приближается к N, если xq > Н. Но популяция вымирает из-за сбора
урожая, если xq < Н. Наконец, устойчивая точка равновесия х = N
и неустойчивая точка равновесия х = Н показаны на фазовой диаграмме
на рис. 2.2.9. ■
Пример 5
Для конкретного приложения наших заключений об устойчивости в
примере 4 предположим, что к = 1 и М = 4 для численности x(t)
логистической популяции рыб в озере, причем численность измеряется в сотнях,
& время t в годах. Без вылова рыбы вообще озеро в конечном счете
содержало бы почти 400 рыб независимо от начальной численности популяции.
Теперь предположим, что h — 3, так что ежегодно вылавливаются 300
рыб (с постоянной нормой в течение года). Уравнение A2) тогда примет
вид dx/dt = хD — х) — 3, и квадратное уравнение
-х2 + Ах - 3 = C - х){х - 1) = 0
имеет решения Н = 1 и N = 3. Таким образом, пороговая численность
популяции —100 рыб, и (новая) граничная численность популяции равна
300 рыбам. Короче говоря, если в озере первоначально было больше 100
особей рыбы, то при увеличении t численность популяции рыб
приблизится к граничному значению 300 рыб. Но если в озере первоначально
было меньше 100 особей рыбы, то вся рыба в озере будет выловлена,
и рыба исчезнет полностью за конечный период времени. ■
Бифуркация и зависимость от параметров
Биологическая или физическая система, которая моделируется дифференциальным
уравнением, может существенно зависеть от числовых значений некоторых коэффициентов или
параметров, которые входят в уравнение. Например, при изменении значения параметра
может резко измениться количество точек равновесия уравнения.
152 Глава 2. Математинервие модели и чищенные методы
Пример 6
Дифференциальное уравнение
dx
dt=xD-x)-h A9)
(х в сотнях) моделирует сбор урожая в логистической популяции при
к = 1 и граничной численности популяции М = 4 (сотни). В примере 5
мы рассматривали случай сбора урожая на уровне ft = 3, и нашли, что
новая граничная численность популяции равна N = 3 (сотни) и
пороговое значение численности популяции равно Н = 1 (сотня). Типичные
интегральные кривые, включая равновесные решения х(t) = 3nx(t) = 1,
напоминают изображенные на рис. 2.2.8.
Теперь давайте исследуем зависимость поведения кривых от сбора
урожая ft. Согласно уравнению A3) при к = 1 и М = 4, граничная
и пороговая численности популяции NnH определяются так:
H,N= i D ± л/16 - 4ft) = 2±\/I^ft. B0)
Если ft < 4 (мы ведь можем рассматривать и отрицательные значения
— ft, чтобы описать добавление (завоз рыбы вместо вылова рыбы)), то
существуют различные равновесные решения x(i) = N и x(t) = Н при
N > Н, как показано на рис. 2.2.8.
Но если ft = 4, то уравнение B0) дает N = Н — 2, так что
дифференциальное уравнение имеет только единственное равновесное решение
x(t) = 2. В этом случае интегральные кривые уравнения напоминают
показанные на рис. 2.2.10. Если начальная численность х0 (в сотнях)
рыбы превышает 2, то численность популяции приближается к граничной
численности популяции 2 (сотни рыбы). Однако при любой начальной
численности популяции хо < 2 (сотни) результатом будет полное
исчезновение рыбы вследствие вылова (сбора урожая) 4 (сотен) рыб ежегодно.
Если,наконец,ft > 4,токвадратноеуравнение,соответствующееB0),
не имеет вещественных решений, и потому дифференциальное
уравнение A9) не имеет никаких равновесных решений. Интегральные кривые
тогда напоминают показанные на рис. 2.2.11, и (независимо от начального
числа рыб), популяция исчезнет в результате чрезмерного вылова (сбора
урожая). ■
Если мы будем постепенно увеличить значение параметра ft в уравнении A0), то будет
изменяться и вид интегральных кривых — от того, который подобен изображенному на
рис. 2.2.8 при ft < 4, до того, который подобен изображенному на рис. 2.2.10 при ft = 4,
и, наконец, ктому, который подобен изображенному на рис. 2.2.11 при ft > 4. Таким образом,
дифференциальное уравнение
• имеет две точки равновесия, если ft < 4;
• имеет одну точку равновесия, если ft = 4;
• не имеет точек равновесия, если ft > 4.
Значение ft = 4, при котором изменяется качественный характер решений при увеличении
ft, называют точкой бифуркации (точкой удвоения) для дифференциального уравнения,
2.2. Равновесные решения и устойчивость t53
1 \
Ьчй
!
\
*-^*-??*гв*- -^
\
* * * I
V \ \
: I 'i J
i 1 '« i 1 i 1
n \
1 r\ \ \ \ \ \ \ \ \ \ \
M\\\\\\\\^
\\\ \ \ \ \ \ \]
It III 1
i 1 li I
Рис. 2.2.10. Интегральные кривые
уравнения х' = хD — х) — h в случае
критического сбора урожая h = 4
Рис. 2.2.11. Интегральные кривые
уравнения х' = хD — х) — h при
чрезмерном сборе урожая /г = 5
содержащего параметр h. Общий способ визуализировать соответствующую бифуркацию
решений состоит в том, чтобы начертить диаграмму бифуркаций, состоящую из всех точек
(/г, с), где с—точка равновесия уравнения а/ = хD — x) + h. Например, если мы перепишем
уравнение B0) в виде
с = 2 ± >/4-Л,
(c-2J=4-/i,
где с = iV или с = Я, то получим уравнение параболы, показанной на рис. 2.2.12. Эта
парабола и есть диаграмма бифуркации для нашего дифференциального уравнения,
которое моделирует численность логистической популяции рыб с выловом (сбором урожая) на
уровне, заданном параметром h.
(с-2J = 4-й
Рис. 2.2.12. Парабола (с - 2J = 4 - h -
это диаграмма бифуркации для
дифференциального уравнения х' = хD — х) — h
12^ag^4jL
В задачах 1-12 сначала решите уравнение f(x) = 0, чтобы найти точки равновесия данного
автономного дифференциального уравнения dx/dt = f(x). Затем проанализируйте знак f(x),
чтобы определить, устойчива или неустойчива каждая из найденных точек равновесия, и
нарисуйте соответствующую фазовую диаграмму для дифференциального уравнения. Затем решите
154 Глава 2. Математические модели и численные методы
дифференциальное уравнение явно — найдите зависимость x(t) от t. Наконец, используйте точное
решение или машинно-генерируемое поле направлений для вычерчивания типичных интегральных
кривых данного дифференциального уравнения и визуально проверьте устойчивость каждой точки
равновесия.
1 dx л <э
1. -=х-4 2.
3. —- = х2 - 4х 4.
at
5.^=^-4 6.
dt
dx
~аЧ
dx
~аЧ
dx
"dt
dx
It
dx
It
= x2
= x2
= (x
= x2
= (x
dx
—
dt
dx
~di
dx
——
dt
dx
dt
dx
H
dx.
~dt
= 3 -
= 3x-
= 9 —
= -C
= 7x-
= B-
X
-x2
о
X
— X
-x2
xK
7.= = («-2)» * =
- 5x + 4 10. ^ = 7x - x* - 10
11. ^ = (x-lf ) 12.
В задачах 13-18 используйте компьютерную систему или графический калькулятор для
вычерчивания поля направлений (или достаточно многих интегральных кривых), чтобы указать
устойчивость или неустойчивость каждой точки равновесия данного дифференциального уравнения.
13. ^ = (х + 2){х - 2J 14. ^ = х(х2 - 4)
15.f = (*2-4J li. ! = (*>-4)»
17. ^ = х2{х2 - 4) 18. ^ = х\х2 - 4)
dt dt
19. Дифференциальное уравнение dx/dt = ^хA0 — ж) — /г моделирует логистическую популяцию
со сбором урожая по норме h. Определите (как в примере 6) зависимость количества точек
равновесия от параметра h, а затем создайте диаграмму бифуркации, подобную приведенной
на рис. 2.2.12.
20. Дифференциальное уравнение dx/dt = -^х(х — 5) + s моделирует численность популяции
с пополнением по норме s. Определите зависимость количества точек равновесия с от
параметра 5, а затем нарисуйте соответствующую диаграмму бифуркации в плоскости Osc.
21. Рассмотрим дифференциальное уравнение dx/dt — kx — х3. (а) Пусть к < 0. Покажите, что
единственному критическому значению с = 0 переменной х соответствует устойчивое
равновесное решение. (Ь) Пусть к > 0. Покажите, что точка равновесия с — О теперь неустойчива, но
зато устойчивы точки равновесия с = ±у/к. Таким образом, качественный характер решений
изменяется при значении параметра к = 0, и потому к = 0 — точка бифуркации
дифференциального уравнения с параметром к. Чертеж, на котором нанесены все точки вида (к, с), где
с — точка равновесия уравнения х' — кх — х3, представляет собой знаменитую "диаграмму
бифуркации", показанную на рис. 2.2.13.
22. Рассмотрим дифференциальное уравнение dx/dt = х + кх3, содержащее параметр к.
Проанализируйте (как в задаче 21) зависимость числа и характера точек равновесия от значения к,
и создайте соответствующую диаграмму бифуркации.
23. Предположим, что логистическое уравнение dx/dt = кх(М — х) моделирует численность x(t)
популяции рыб в озере после t месяцев, в течение которых вылов рыбы не производится. Теперь
предположите, что вылов рыбы из озера равен hx рыб в месяц (причем h — положительная
константа). Таким образом, количество вылавливаемых рыб пропорционально численности
популяции рыб, а не равно постоянной норме, как в примере 4. (а) Пусть 0 < h < kM.
Покажите, что численность популяции все равно удовлетворяет логистическому уравнению.
2.2. Равновесные решения и устойчивость 155
к
Рис. 2.2.13. Диаграмма бифуркации
уравнения dx/dt = кх — х3
Каково новое ограничение численности популяции? (Ь) Пусть h ^ кМ. Покажите, что x(t) —» О
при £ —► Н-оо, так что озеро в конечном счете останется без рыбы.
24. Отделите переменные в логистическом уравнении со сбором урожая dx/dt = k(N — х)(х —
—Я), а затем используйте разложение на элементарные дроби, чтобы получить решение, данное
в уравнении A5).
25. Используйте альтернативное представление
,v N(xp - Я) + Я(ЛГ - x0)e-k{<N-H)t
Х() (х0 - Я) + (ЛГ - а.0)е-*("-* >*
_ Я(ЛГ - ж0)е-^^-я)' - N(H - хр)
(N- х0)е-к("-н» - (Я - жо)
решения A5), чтобы прийти к утверждениям A7) и A8).
В примере 4 рассматривался случай Ah > кМ2 для уравнения dx/dt = кх(М — х) — h, который
описывает сбор урожая по постоянной норме с логистической популяции. В задачах 26 и 27
рассматриваются другие случаи.
26. Пусть 4/i = kM2. Покажите, что типичные интегральные кривые выглядят так, как показано
на рис. 2.2.14. Таким образом, если хо ^ М/2, то x(t) —> М/2 при t —► +оо. Но если жо <
< М/2, то ж(£) = 0 после истечения конечного периода времени, так что вся рыба в озере
будет выловлена. Точку равновесия х = М/2 можно было бы назвать полуустойчивой, потому
что, с одной стороны, она выглядит как устойчивая, а с другой — как неустойчивая.
27. Пусть Ah > кМ2. Покажите, что x(t) = 0 после конечного периода времени, так что вся
рыба в озере будет выловлена (независимо от начальной численности популяции). Указание.
Выделите квадрат и перепишите дифференциальное уравнение в форме dx/dt = — k[(x —
— аJ + б2]. Затем найдите решение в явном виде путем отделения переменных. Результаты
этой и предыдущей задач (вместе с примером 4) показывают, что h = \kM2 — критическая
скорость сбора урожая в логистической популяции. При любой меньшей скорости сбора урожая
численность популяции приближается к граничной численности популяции N, которая меньше
М (почему?), а при любой большей скорости сбора урожая популяция исчезнет.
28. В этой задаче рассматривается дифференциальное уравнение dx/dt = кх(х — М) — h, которое
моделирует сбор урожая в бесхитростной популяции (например, в популяции аллигаторов).
Покажите, что это уравнение может быть переписано в форме dx/dt — к(х — Н)(х — К), где
156
Глава 2. Математические модели и численные методы
\\ I I I
_ ч,
'Ч
х = 0 *
- ill
1 1 IJ
\ 1
\ Н
1=шп
"■ 'Л 1
; i i * п
ч
0"
И 1 ! 1 ij
Ч з
\ \ * = 0 |
Ч^__Л4^
11 i { i Н
Рис. 2.2.14. Интегральные кривые
логистического уравнения для популяции
со сбором урожая при 4/г = &М2
Рис. 2.2.15. Интегральные кривые
в случае популяции аллигаторов со
сбором урожая (с отловом аллигаторов)
Покажите, что типичные интегральные кривые выглядят так, как показано на рис. 2.2.15.
29. Рассмотрим следующие два дифференциальные уравнения:
dx
dt
dx
~dt
= (x — a)(x — b)(x — c)
= (a — x)(b — x)(c — ж),
B1)
B2)
каждое из которых имеет точки равновесия а, 6 и с; предположим, что а < Ь < с. Для
одного из этих уравнений устойчива только точка равновесия Ъ\ для другого уравнения Ь —
единственная неустойчивая точка равновесия. Нарисуйте фазовые диаграммы для этих двух
уравнений и по нарисованным диаграммам определите, какой случай относится к какому из
уравнений. Не пытаясь явно решить ни одно из уравнений, сделайте грубые наброски типичных
интегральных кривых для каждого из уравнений. Вы увидите два стока и источник в одном
случае, два источника и сток в другом.
2.3. Модели типа ускорение-скорость
В разделе 1.2 мы обсуждали вертикальное движение массы т около поверхности земли под
влиянием гравитационного поля, в котором ускорение постоянно. Если мы пренебрегаем
любыми эффектами сопротивления воздуха, то второй закон Ньютона (F = та)
подразумевает, что скорость v тела, имеющего массу га, удовлетворяет уравнению
dv
т
dt
Fg,
A)
где Fg = —mg — направленная вниз сила тяжести, а гравитационное ускорение равно
д « 9,8 м/с2 (в единицах системы МКС; д « 32 фт/с2 в единицах системы fps).
Пример 1
Предположим, что стрела выстрелена из арбалета прямо вверх с
поверхности земли (уо = 0) с начальной скоростью vo = 49 (м/с). Тогда
уравнение A) с д = 9,8 дает
dv
= -9,8, так что v(t) = -(9,8)* + ^о = -(9,8)* + 49.
dt
2.3. Модели типа ускорение-скорость 157
Следовательно, высота (рассматриваемая как функция времени) стрелы
y(t) дается формулой
y(t) = f[-(W + 49l * = ~D,9)t2 + 49* + y0 = ~D,9)t2 + 49*.
Стрела достигает ее максимальной высоты, когда v = — (9,8)£ + 49 = О,
следовательно, в момент времени t = 5 (с). Таким образом, максимальная
высота
• Ушах = уE) = ~D,9)E2) + D9)E) =f 122,5 (м).
Стрела упадет на землю, когда у = — D,9)£(£ — 10) = 0, таким образом,
после 10 секунд полета. ■
Теперь мы хотим в этой задаче принять во внимание сопротивление воздуха, т. е. сделать
так, как в примере 1. Сила Fr9 оказываемая сопротивлением воздуха на двигающееся тело
массой га, должна быть добавлена в правую часть уравнения A), так что теперь
dv „ „
m— = FG + FR. B)
Ньютон в своих знаменитых Началах (Principia Mathematica) показал, что из простых
физических предположений следует, что Fr пропорциональна квадрату скорости: Fr = kv2.Ho
эмпирические исследования показывают, что фактическая зависимость сопротивления
воздуха от скорости может быть весьма сложной. Для многих целей достаточно предположить,
что
Fr = kv*>,
где 1 й р ^ 2 и значение к зависит от размера и формы тела, а также от плотности и вязкости
воздуха. Вообще говоря, р = 1 для относительно малых скоростей и р = 2 для больших
скоростей, ну а для промежуточных скоростей 1 < р < 2. Но конкретные значения
"низких скоростей" и "высоких скоростей" зависят от тех же самых коэффициентов, которые
определяют значение коэффициента к.
Таким образом, сопротивление воздуха—сложное физическое явление. Но для
упрощения предположим, что Fr точно выражается приведенной выше формулой, причем р = 1
илир = 2. В конце концов, это приводиткхорошей математической модели, которая
предсказывает самые важные качественные особенности движения тела в среде с сопротивлением.
Сопротивление, пропорциональное скорости
Давайте сначала рассмотрим вертикальное движение тела массой т около поверхности
земли. На тело действуют две силы—направленная вниз сила тяготения Fq и сила Fr
сопротивления воздуха, которая пропорциональна скорости (так что р = 1). Сила сопротивления
воздуха, конечно же, направлена против направления движения тела. Если в системе
координат положительное направление у направлено вверх, причем у = 0 на уровне земли, то
FG = -mg и
► FR = -kv, C)
где к — положительная константа и v = dy/dt — скорость тела. Обратите внимание, что
знак "минус" в уравнении C) делает Fr положительным (сила направлена вверх), если
158 Глава 2. Математические модели и численные методы
(Заметьте, что FR направлена
вверх при падении тела)
т ш
Сила тяжести F = FR+ FG
Поверхность земли
Рис. 2.3.1. Вертикальное
движение при сопротивлении воздуха
тело падает (v отрицательно) и делает Fr отрицательным (сила направлена вниз), если
тело набирает высоту (v положительна). Как видно из рис. 2.3.1, равнодействующая сил,
действующих на тело, равна
F = FR + FG = -kv - тд,
и закон Ньютона движения F = m(dv/dt) приводит к уравнению
dv
т— = —kv — та.
dt *
Таким образом,
dv
~di
= -PV - 9,
D)
где/? = к/т > 0. Вы должны самостоятельно непосредственной проверкой убедиться, что,
если бы положительное направление оси у было направлено вниз, то уравнение D) имело
бы вид dv/dt = — pv -f g.
Уравнение D) — дифференциальное уравнение первого порядка с разделяющимися
переменными, и его решением является функция
Здесь г?о = v@) — начальная скорость тела. Обратите внимание, что
vT — lim v(t) = —.
t-юо р
E)
F)
Таким образом, скорость тела, падающего при сопротивлении воздуха, не увеличивается
неограниченно; вместо этого она приближается к конечной граничной скорости, или
предельной скорости,
2.3. Модели типа ускорение-скорость 159
Этот объясняет, почему парашютист не разбивается при прыжке; это даже помогает
объяснить случайное выживание людей, которые выпадают без парашютов из высоко летящих
самолетов.
Мы теперь перепишем уравнение E) в виде
dy
dt
= (vo-vT)e pt + u
(8)
Интегрирование дает
V(t)
1
(vo-^e-P* +vTt + C.
Мы подставляем 0 вместо t и обозначаем через у о = у@) начальную высоту тела. Таким
образом, мы находим, что С = уо + (vq — vT)/p9 и потому
y(t) = y0 + vTt+ -(vo
Р
0A-е-<><).
(9)
Равенства (8) и (9) дают скорость v и высоту у тела, двигающегося вертикально под
действием сил тяжести и сопротивления воздуха. Формулы зависят от начальной высоты у о
тела, его начальной скорости vo и коэффициента лобового сопротивления р.
(Коэффициент лобового сопротивления — это константа, такая, что ускорение из-за сопротивления
воздуха равно clr = — pv.) Эти два уравнения также содержат предельную скорость vr,
определенную в уравнении F).
Для человека, спускающегося на парашюте, обычно значение р равно 1,5, что
соответствует предельной скорости \vT | « 21,3 фута в секунду, или приблизительно 14,5 мили в час.
Для парашутиста-неудачника, выпрыгнувшем вместо парашюта в расстегнутом пальто,
трепещущем на ветру при падении, р может увеличиться, возможно, даже до 0,5, что дает
предельную скорость \vT\ «65 футов в секунду, или приблизительно 44 мили в час. В задачах 10
и 11 даются данные для некоторых вычислений, связанных с прыжками с парашютом.
Пример 2
Мы снова полагаем, что стрела выстрелена из арбалета прямо вверх с
начальной скоростью г;о = 49 м/с с поверхности земли. Но теперь мы
принимаем во внимание сопротивление воздуха, причем р = 0,04 в
уравнении D). Мы спрашиваем, как изменится максимальная высота и время
полета вверх по сравнению со значениями, найденными в примере 1.
Решение Мы подставляем уо = 0, vo = 49 и vT = — д/р = —245 в равенства E)
и (9) и получаем
v(t) = 294е~*/25 - 245,
y(t) = 7350 - 245£ - 7350e~t/25.
Найдем время, требуемое для того, чтобы стрела достигла максимальной
высоты (тогда v = 0). Для этого мы решаем уравнение
v(t) = 294e-t/25 - 245 = 0
и находим tm = 251пB94/245) « 4,558 (с). Максимальная высота равна
Утах = v(tm) « 108,280 метра (а не 122,5 метра, как было бы при
отсутствии сопротивления воздуха). Чтобы узнать, когда стрела упадет на
160 Глава 2. Математические модели и численные методы
землю, нужно решить уравнение
y(t) = 7350 - 245* - 7350e"t/25 = 0.
Используя метод Ньютона, мы можем начать с начального значения to =
= 10 и выполнять итерации tn+i — tn — y(tn)/y'(tn) , чтобы найти
последовательные приближения к корню. Или мы можем просто
использовать команду Solve на калькуляторе или в компьютере. Мы находим,
что стрела находится в воздухе tf « 9,411 секунды (а не 10 секунд, как
было бы при отсутствии сопротивления воздуха). Она упадет на землю
с меньшей скоростью \v(tf)\ « 43,227 м/с (а не с начальной скоростью
49 м/с).
Таким образом, эффект сопротивления воздуха уменьшает
максимальную высоту стрелы, полное время полета и ее скорость при
падении. Также обратите внимание, что стрела при наличии сопротивлении
воздуха падает дольше (tf — tm « 4,853 с), чем поднимается в воздухе
(£ш«4,558с). ■
Сопротивление пропорционально квадрату скорости
Теперь мы предполагаем, что сила сопротивления воздуха пропорциональна квадрату
скорости:
> FR = ±Ь2, A0)
причем к > 0. Выбор знаков здесь зависит от направления движения, против которого
направлена сила сопротивления. Если положительное направление оси у направлено вверх,
то Fr < 0 для движения вверх (когда v > 0) и Fr > 0 для движения вниз (когда v < 0).
Таким образом, знак Fr всегда противоположен знаку v, так что мы можем переписать
уравнение A0) в виде
FR = -kv\v\. A0')
Тогда второй закон Ньютона дает
dv ^ „ _ . .
га— = FG + FR = -mg - kv\v\;
т.е.
-^;=-0-H^ (И)
где р = к/т > 0. Мы должны рассмотреть случаи движения вверх и вниз отдельно.
Движение вверх. Предположим, что снаряд запущен прямо вверх из начального
положения уо с начальной скоростью v$ > 0. Тогда уравнение A1) для v > 0 дает дифференциальное
уравнение
-И4
^ = -9-pv2 = -g[l + ^y). A2)
2.3. Модели типа ускорение-скорость
161
В задаче 13 мы просим вас сделать замену и = v\Jpjg и применить знакомый интеграл
г du = arctgw -I- С,
J 1+и2
чтобы найти скорость снаряда в виде функции
v(t) = J - tg (d - ty/pg), причем d = arctg I v0 J- J .
Поскольку J tg и du = — In | cos u\~\-C9 второе интегрирование (см. задачу 14), приводит
к функции, выражающей положение тела: и
A3)
y(t) = Уо + - Ь
Р
cos (d - ty/pg)
cosCi
A4)
Движение вниз. Предположим, что снаряд запущен (или сброшен) прямо вниз из
начального положения уо с начальной скоростью г;о S О- Тогда уравнение A1) при v < 0 приводит
к дифференциальному уравнению
dv
-д + pvz
0-И
A5)
В задаче 15 мы просим вас сделать замену и — vy/p/g и применить интеграл
1
I
1-й2
чтобы получить скорость снаряда в виде функции
du — arc th и + С,
v(t) = ^ /- th (С2 - *\/w), где С2 = arc th f г;0
A6)
Поскольку J th и du = ln|coshu| -I- С, еще одно интегрирование (задача 16) приводит
к функции, дающей положение
y(t) = уо - - In
р
cosh (С2 - ty/pg)
cosh Сч
A7)
(Обратите внимание на аналогию между уравнениями A6) и A7) и уравнениями A3)иA4)
для движения вверх.)
Если^о = 0,тоС2 = 0, так что v (t) = — y/g/pth (ty/pg). Поскольку
/ sinh x (cx — 6~x)
lim thx = lim —-— = lim -f- = 1,
x—kx> x—►<» coshx x—юо ^(ex 4- е-ж)
то из этого следует, что в случае движения вниз скорость тела приближается к предельной
скорости
w-Л
A8)
(по сравнению с \vT\ = #//? в случае движения вниз с линейным сопротивлением,
удовлетворяющим уравнению D)).
162 Глава 2. Математические модели и численные методы
120
100
80
60
40
20
У Без
^•*-~— ^сопротивления
4^*^^\\
Ж \ v
" / с ^
- / сопротивлением^\
/ i i i i i i i i i\ \
123456789 10 г
Пример 3
Рис. 2.3.2. Графики функций (высоты), найденных
в примере 1 (без сопротивления воздуха), в
примере 2 (с линейным сопротивлением воздуха) и в
примере 3 (с сопротивлением воздуха, пропорциональным
квадрату скорости). Два последних графика визуально
неразличимы.
Мы снова рассматриваем стрелу, выпущенную прямо вверх с начальной
скоростью г;о = 49 м/с из арбалета с поверхности земли, как в примере 2.
Но теперь мы принимаем, что сопротивление воздуха пропорционально
квадрату скорости, причем р = 0,0011 в уравнениях A2) и A5). В
задачах 17 и 18 мы просим проверить последнюю строку следующей таблицы.
Сопр. Макс. Время Время Время Прицельн.
воздуха высота (фт) полета (с) [тщ^тфЩ ; спуска (с) скорость (фт/с)
0,0
@,04)v
@,0011)v2
122,5
108,28
108,47
10
9,41
9,41
5
4,56
4,61
5
4,85
4,80
49
43,23
43,49
Сравнение последних двух строк для движения нашей стрелы,
выпущенной из арбалета, показывает, что есть небольшая разность между
движением при сопротивлении воздуха, линейно зависящим от скорости, и при
сопротивлении воздуха, пропорциональном квадрату скорости. И
потому на рис. 2.3.2, где соответствующие функции (высоты) изображены
в виде графиков, разность едва заметна. Однако в более сложных
ситуациях, например, при входе в атмосферу и спуске космического корабля,
разность между линейным и нелинейным сопротивлением может быть
существенна. В
Переменное гравитационное ускорение
Если снаряд при вертикальном движении не остается в непосредственной близости от
поверхности земли, гравитационное ускорение, действующее на него, не постоянно. Согласно
закону всемирного тяготения Ньютона, сила притяжения между двумя точечными массами
Мит, находящимися на расстоянии г, равна
GMm
A9)
2.3. Модели лгипа ускорение-скорость 163
где G — некоторая эмпирическая константа (G « 6,6726 х 10~хх Н • (м/кгJ в системе МКС).
Формула также имеет силу, если одна или обе из этих двух масс представляют собой
однородные сферы; в этом случае расстояние г равно расстоянию между центрами сфер.
Следующий пример подобен примеру 2 из раздела 1.2, но теперь мы принимаем во
внимание притяжение Луны.
Пример 4
Лунный посадочный модуль свободно падает на Луну, причем на высоте
53 км над поверхностью Луны его скорость, направленная к Луне, равна
1477 км/час. Его тормозные реактивные двигатели, запущенные в
безвоздушном пространстве, обеспечивают замедление Т = 4 м/с2. На какой
высоте над поверхностью Луны должны быть активизированы
тормозные реактивные двигатели, чтобы гарантировать "мягкое приземление"
(v = 0 при соударении)?
Решение Пусть r(t) обозначает расстояние посадочного модуля от центра Луны
в момент времени t (рис. 2.3.3). Складывая (постоянное) ускорение тяги
Т и (отрицательное) лунное ускорение F/m = GM/r2 из уравнения A9),
получаем дифференциальное уравнение, левая часть которого есть
ускорение
dt2
Т-
GM
B0)
гдеМ = 7,35 х 1022 (кг) — масса Луны, которая имеет радиус R = 1,74 х
х 106 м (или 1740 км, немного больше четверти радиуса Земли). Замечая,
что это дифференциальное уравнение второго порядка не содержит
независимую переменную t, мы заменяем
v =
dr
А'
dt2
dv
It
dv dr
dv
dr dt dr
(как в уравнении C6) из раздела 1.6) и получаем уравнение первого
порядка
dV _rp
dr
GM
с новой независимой переменной г. Интегрирование по г теперь
приводит к уравнению
1 2 ™ GM „
-г;2 = Тг+ + С,
B1)
которое мы можем применить как перед запуском (Т = 0), так и после
запуска посадочного двигателя (Т = 4).
Перед запуском посадочного двигателя. Замена Т
уравнение
1 2 GM _
2 г
0 в B1) дает
B1а)
164 Глава 2. Математические модели и численные методы
Лунный
С2Э^ посадочный
Т модуль
1^ЛжМЛ.12
LiikjtL
•Поверхность Луны
R
• Центр Луны
Рис. 2.3.3. Лунный посадочный модуль, спускающийся
на поверхность Луны
где константа С\ = Vq/2 — GM/ro, причем
„ км „лллм 1 час 14770 м
Vo = -1477— х 1000— х —— = —
час км 3600 с 36 с
и г0 = A,74 х 106) + 53000 = 1,793 х 106 м (от начального положения
в системе координат скорость-положение).
После запуска посадочного двигателя. Замена Т = 4 и v = 0, г = R
(при приземлении) в B1) дает
l1?=4r + — + C2, B1b)
2 г
где константа Съ = — AR — GM/R получена подстановкой значений
v = 0, г = R при приземлении.
В момент запуска посадочного двигателя лунного посадочного
модуля его положение и скорость удовлетворяют и уравнению B1а),
и уравнению Blb). Поэтому, чтобы найти его искомую высоту h над
поверхностью Луны при запуске посадочного двигателя, мы можем при-
равнятьправыечастивB1а)иB1Ь).Этодаетг = \{С\— С2) = 1,78187х
х 106 и, наконец, h = г — R = 41870 м (т. е. 41,87 км — чуть больше
26 миль). Кроме того, подстановка этого значения г в B1 а) дает скорость
v = —450 м/с в момент воспламенения. ■
Вторая космическая скорость
Жюль Верн в своем романе С Земли на Луну, написанном еще в 1865 году, поднял вопрос
о том, какую начальную скорость должен иметь снаряд, запущенный с поверхности Земли,
для того чтобы достичь Луны. Точно так же мы можем спросить, какой должна быть
начальная скорость vo для того, чтобы снаряд не упал на Землю и не стал спутником Земли. Это
будет так, если его скорость v = dr/dt остается положительной для всех t > 0, так что
2.3. Модели типа ускорение-скорость 165
t Скорость v (О
т
r(t)
Г\1
М
Рис. 2.3.4. Масса m на большом расстоянии от Земли
снаряд всегда движется от Земли. Обозначим через г (t) расстояние снаряда от центра Земли
в момент времени t (рис. 2.3.4). Тогда мы имеем уравнение
dv d2r
~db = 'dt2
GM
B2)
подобное уравнению B0), но в нем Т = 0 (отсутствует тяга) и М = 5,975 х 1024 (кг)
обозначает массу Земли, которая имеет экваториальный радиус R = 6,378 х 106 (м). Подстановка
выражения dv/dt = v(dv/dr) (полученного по цепному правилу), как и в примере 4, дает
dv GM
dr r2
Тогда интегрирование обеих частей по г приводит к равенству
1 2 GM „
2 г
Теперь v = vq и г = R, когда t = 0, так что С — \v\ — GM/R, и, следовательно, решение
уравнения относительно гг дает
v2 = v2 + 2GM
е-*)-
B3)
Это неявное решение уравнения B2) определяет скорость снаряда v как функцию его
расстояния г от центра Земли. В частности,
if>v$
2GM
R '
так что v останется положительным при условии, что v% ^ 2GM/R. Поэтому вторая
космическая скорость для Земли дается формулой
V0
2GM
Я
B4)
166 Глава 2. Математические модели и численные методы
В задаче 27 мы просим показать, что если начальная скорость снаряда превышает
y/2GM/R, то r(t) —> оо при t —> оо, так что снаряд действительно улетит с Земли. Для
данных значений G и массы М Земли и ее радиуса R, формула дает vo « 11180 (м/с)
(приблизительно 36680 футов в секунду, приблизительно 6,95 мили в секунду, приблизительно
25000 миль в час).
Замечание. Уравнение B4) дает вторую космическую скорость для любого
(сферического) планетарного тела, если в это уравнение подставить массу и радиус планеты.
Например, если подставить массу М и радиус R Луны, данные в примере 4, мы найдем, что
вторая космическая скорость для старта с поверхности Луны равна vq « 2375 м/с. Это
только чуть больше одной пятой второй космической скорости для старта с поверхности Земли,
факт, который очень облегчает возвращение на Землю (см. роман С Луны на Землю). ■
2.3. Задачи
1. Ускорение спортивного автомобиля Maserati пропорционально разности между 250 км/час
и его скоростью. Эта машина может ускориться из состояния покоя до 100 км/час за 10 с.
Сколько времени потребуется для этого автомобиля, чтобы ускориться из состояния покоя до
200 км/час?
2. Предположим, что тело движется в среде, причем сопротивление среды пропорционально
скорости v тела, так что dv/dt = — kv. (а^ Покажите, что скорость и положение тела в момент
времени t даются формулами
v(t) = v0e~kt
x(t) = x0+(j^)(l-e-kt).
(b) Убедитесь, что тело переместится только на конечное расстояние, и найдите это расстояние.
3. Предположим, что моторная лодка движется со скоростью 40 футов в секунду, когда ее
двигатель внезапно выходит из строя, и что через 10 с после этого лодка замедлилась до 20 футов
в секунду. Примите, как и в задаче 2, что сопротивление, с которым сталкивается судно во
время каботажного плавания, пропорционально скорости судна. Как далеко может проплыть
лодка?
4. Рассмотрим тело, которое перемещается горизонтально в среде, сопротивление которой
пропорционально квадрату скорости v, так что dv/dt = — kv2. Покажите, что
и что
x(t) = хо + - 1пA + vokt).
Обратите внимание что, в отличие от результата задачи 2, x(t) —> +оо при t —► +оо.
5. Предполагая сопротивление среды пропорциональным квадрату скорости (как в задаче 4),
определите, сколько проплывет моторная лодка из задачи 3 вдоль побережья за первую минуту после
выхода ее мотора из строя?
6. Предположим, что тело, двигающееся со скоростью v, испытывает сопротивление среды,
определяемое формулой dv/dt = — kv3/2. Покажите, что
v(t) =
(fcV^ + 2)J
2.3. Модели типа ускорение-скорость 167
и что
*<«)=хо +^(l-g^j).
Заключите, что если сопротивление пропорционально скорости тела в степени §, то тело
пройдет только конечное расстояние до остановки.
7. Предположим, что автомобиль начинает двигаться из состояния покоя и его двигатель
обеспечивает ускорение 10 фт/с2, а сопротивление воздуха обеспечивает замедление 0,1 фт/с2 на
каждый фут в секунду скорости автомобиля, (а) Найдите максимально возможную
(граничную) скорость автомобиля. (Ь) Сколько времени потребуется автомобилю, чтобы достичь 90%
его граничной скорости, и как далеко он переместится при этом?
8. Решите заново обе части задачи 7, но теперь примите, что замедление из-за сопротивления
воздуха равно @,001 )v2 фт/с2, если скорость автомобиля равна v фут в секунду.
9. Моторная лодка весит 32000 фунтов, и ее двигатель обеспечивает тягу 5000 фунтов.
Предположите, что сопротивление воды равно 100 фунтам на каждый фут в секунду скорости v лодки.
Тогда
1000^ = 5000 - 100г>.
at
Если лодка начинает двигаться из состояния покоя, то какой максимальной скорости она может
достичь?
10. Женщина выпрыгивает из самолета на высоте 10 000 футов, падает свободно в течение 20 с, а
затем открывает парашют. Сколько времени ей потребуется, чтобы достичь поверхности
земли? Примите, что сопротивление воздуха линейно зависит от скорости: pv фт/с2, и возьмите
р — 0,15 для полета без парашюта и р = 1,5 для полета с парашютом. (Указание. Сначала
определите высоту и скорость в момент раскрытия парашюта.)
11. Согласно заметке в газете, парашютист выжил, совершив тренировочный прыжок с 1200 футов,
но его парашют не раскрылся, хотя и обеспечил немного дополнительного сопротивления, так
как трепетался нераскрытым на ветру. Предположительно он ударился о землю со скоростью
100 миль в час после падения в течение 8 с. Проверьте точность этой заметки. (Указание.
Найдите р из уравнения D), принимая, что предельная скорость равна 100 миль в час. Затем
вычислите время, требуемое для падения с высоты 1200 футов.)
12. Предложено избавиться от ядерных отходов, залитых в металлические бочки весом W =
= 640 фунтов и объемом 8 кубических футов, путем сброса их в океан (vo = 0). Сила
сопротивления воды для металлической бочки, сбрасываемой в океан, дается уравнением
di)
m37 = -W + B + FR,
at
где сила В равна весу (при удельном весе 62,5 фунта на кубический фут) объема воды,
вытесненной металлической бочкой (закон Архимеда), а сила сопротивления воды Fr найдена
опытным путем, и оказалось, что она равна 1 фунту на каждый фут в секунду скорости
металлической бочки. Если металлические бочки могут лопнуть при соударении на скорости больше
75 футов в секунду, то какова максимальная глубина, на которую они могут быть сброшены
в океан так, чтобы они не лопнули?
13. Отделите переменные в уравнении A2) и сделайте замену и = vyjр/д, чтобы получить
функцию, выражающую скорость при движении вверх (эта функция определена в уравнении A3))
при начальном условии v@) = vq.
14. Проинтегрируйте функцию, выражающую скорость в уравнении A3), чтобы получить
функцию, выражающую положение тела при движении вверх (эта функция определена в
уравнении A4)) при начальном условии у@) = уо.
168 Глава 2. Математические модели и численные методы
15. Отделите переменные в уравнении A5) и сделайте замену и = vy/p/g, чтобы получить
функцию, выражающую скорость, при движении вниз (эта функция определена в уравнении A6))
при начальном условии v@) = vo.
16. Проинтегрируйте функцию, выражающую скорость (эта функция определена в уравнении A6)),
чтобы получить функцию, выражающую положение тела при движении вниз (эта функция дана
в уравнении A7)) при начальном условии у@) = уо.
17. Стрела выпущена из арбалета, как в примере 3, прямо вверх с поверхности земли (у = 0)
в момент времени t = 0 с начальной скоростью vq — 49 м/с. Положите д = 9,8 м/с2 и р =
= 0,0011 в уравнении A2). Затем используйте уравнения A3) и A4), чтобы показать, что стрела
достигает максимальной высоты приблизительно 108,47 м приблизительно за 4,61 с.
18. Продолжая рассматривать стрелу из задачи 17, предположите, что стрела теперь начинает
падение (vo = 0) с высоты уо = 108,47 м. Затем с помощью равенств A6) и A7) покажите, что она
упадет на землю приблизительно через 4,80 с, имея при соударении скорость приблизительно
43,49 м/с.
19. Моторная лодка начинает двигаться из состояния покоя (начальная скорость v@) = vo — 0).
Ее двигатель обеспечивает постоянное ускорение 4 фт/с2, но сопротивление воды причиняет
замедление г>2/400 фт/с2. Найдите v в момент времени t = 10 с, а также найдите предел
скорости при t —► +оо (т. е. максимальную возможную скорость лодки).
20. Стрела выпущена прямо вверх с поверхности земли с начальной скоростью 160 футов в секунду.
Она испытывает замедление вследствие силы тяжести и замедление г>2/800 из-за сопротивления
воздуха. На какую максимальную высоту она поднимется?
21. Пусть шар подбрасывается вверх с поверхности земли с начальной скоростью vo. Выведите из
уравнения A4), что его максимальная высота равна
—И,+?)-
22. Предположим, что р = 0,075 (в единицах fps, причем g = 32 фт/с2) в уравнении A5) для
парашютиста, падающего с раскрытым парашютом. Если он прыгает с высоты 10 000 футов
и немедленно раскрывает свой парашют, какова будет его предельная скорость? Сколько ему
потребуется времени, чтобы достичь поверхности земли?
23. Предположим, что парашютист из задачи 22 падает свободно в течение 30 с, причем р =
= 0,00075 перед раскрытием его парашюта. Сколько ему теперь потребуется времени, чтобы
достичь поверхности земли?
24. Масса Солнца в 329 320 раз больше, чем масса Земли, а его радиус в 109 раз больше радиуса
Земли, (а) Какой радиус (в метрах) земля должен быть у Земли, чтобы она была черной
дырой, т. е. чтобы вторая космическая скорость на ее поверхности была равна скорости света
с = 3 х 108 м/с? (Ь) Решите задачу из части (а) для Солнца вместо Земли.
25. (а) Покажите, что если снаряд запущен прямо вверх с поверхности Земли с начальной
скоростью vo меньшей, чем вторая космическая скорость y/2GM/R9 то максимальное расстояние
от центра Земли, достигаемое снарядом, равно
_ 2GMR
Гтах~ 2GM-Rvl'
где М иЯ — масса и радиус Земли соответственно. (Ь) С какой начальной скоростью vo нужно
запустить такой снаряд, чтобы он достиг максимальной высоты 100 км над поверхностью
Земли? (с) Выразите в долях земного радиуса максимальное расстояние от центра Земли,
достигаемое снарядом, запущенным с поверхности Земли с 90% второй космической скорости.
i
'1
2.3. Модели типа ускорение-скорость 169
26. Предположим, что двигатель вашей ракеты отказал и вы стали пленником астероида диаметром
3 мили, причем его плотность равна плотности Земли, радиус которой равен 3960 милям. Вы
можете подскочить на высоту 4 фута на Земле в скафандре. Сможете ли вы оторваться от этого
астероида, подпрыгнув с его поверхности?
27. (а) Предположим, что снаряд запущен вертикально с поверхности Земли радиуса г = R с
начальной скоростью vo = y/2GM/R9 так что vq = k2/R9 где к2 = 2GM. Найдите решение
дифференциального уравнения dr/dt = к/у/г (используя уравнение B3) из этого раздела)
в явном виде, чтобы вывести, что r(t) —► оо при t —» оо.
(Ь) Пусть снаряд запущен вертикально вверх с начальной скоростью г?о > y/2GM/R.
Выведите, что
к
<Й V г
+ а> ■-_.
у/т
Почему из этого снова следует, что r(t) —► оо при t —► оо?
28. (а) Предположим, что физическое тело сброшено (vo = 0) с расстояния го > R от центра земли,
так что его ускорение dv/dt = —GM/r2. Игнорируйте сопротивление воздуха. Покажите, что
тело достигает высоты г < го в момент времени
t = \l^(Vrro-r2+roaxccos^-0)-
(Указание. Подставьте г = rocos20, чтобы вычислить J y/r/(ro — r) dr.) (b) Пусть тело
сброшено с высоты 1000 км над поверхностью земли, причем сопротивлением воздуха
можно пренебречь. За сколько времени тело упадет на землю и какая скорость будет при уцаре
о поверхность земли?
29. Предположим, что снаряд запущен прямо вверх с поверхности земли с начальной скоростью
vo < y/2GM/R. Тогда его высота y(t) над поверхностью является решением задачи Коши
(задачи с начальными условиями)
d2y GM , . ,f
-^ = -^rw' у@)=0' y{0)=vo'
Выполните замену dv/dt = v(dv/dy) и затем проинтегрируйте, чтобы получить
2 2 2GMy
v = v0 -
R(R + y)
для скорости v снаряда на высоте у. Какой максимальной высоты он достигнет, если его
начальная скорость равна 1 км/с?
30. В задаче, поставленной Жюлем Верном, снаряд, запущенный с поверхности Земли
притягивается и Землей, и Луной, так что его расстояние r(t) от центра Земли является решением задачи
Коши (задачи с начальными условиями)
d2r GMe.GMm ,nx „ /,nv
w = —^- + w^rj^ r@) = i*' г(°) = ^
где Ме и Мт обозначают массы Земли и Луны, соответственно; R — радиус Земли и S =
= 384400 км — расстояние между центрами Земли и Луны. Чтобы достичь Луны, снаряд
должен только пройти точку между Луной и Землей, где его результирующее ускорение
обращается в нуль. После этого он находится "под управлением" Луны и падает на поверхность
Луны. Найдите минимальную скорость запуска vo, которая позволяет снаряду преодолеть путь
"С Земли до Луны".
170
Глава 2. Математические модели и численные методы
2.3. Приложение. Движение ракеты
Предположим, что ракета на рис. 2.3.5 направлена прямо вверх и отрывается от поверхнрсти
земли в момент времени t = 0. Мы хотим вычислить ее высоту у и скорость v = dy/dt
в момент времени t. Ракета двигается за счет выхлопных газов, которые выпускаются
двигателями (в направлении назад) с постоянной (относительно ракеты) скоростью с. Из-за
сгорания топлива масса га = m(t) ракеты будет переменной.
Чтобы вывести уравнение движения ракеты, мы используем второй закон Ньютона
в форме
dJP
dt
= F,
A)
где Р — импульс (произведение массы на скорость), a F обозначает равнодействующую
внешних сил (веса, сопротивления воздуха и т. д.). Если масса га постоянна, то уравнение A)
принимает стандартную форму F = m(dv/dt) = та.
Но здесь масса га не постоянна. Предположим, масса изменяется от га до га + Дга,
а скорость изменяется от v до v + A v за короткий временной интервал от момента времени
t до момента времени t + At. Тогда изменение импульса самой ракеты равно
АР « (т -h Am)(v + Av) — mv = m Av + v Am + Am Av.
Но система также включает выхлопные газы, удаляемые в течение этого временного
интервала, их масса равна — Дга, а скорость приблизительно равна v — с. Следовательно, полное
изменение импульса в течение временного интервала At равно
АР &(mAv + v Am + Дга Av) + (-Am)(v - с) =
= га Дг; + с Дга + Дга Д v.
Если мы разделим на At и возьмем предел при At —* 0, а затем подставим полученное
выражение для dP/dt в A), мы получим уравнение движения ракеты
dv dm „
га— + с-т— = F.
dt dt
B)
А
w
Рис. 2.3.5. Ракета движется вверх
2.3. Модели типа ускорение-скорость 171
Если F = Fq + jFr, где Fq = — тд — постоянная сила тяжести и Fr = — fa; — сила
сопротивления воздуха, пропорциональная скорости, то уравнение B), наконец, примет вид
dv dm
т— + с— = -тд - kv. C)
Постоянная сила тяги
Теперь предположим, что скорость сгорания реактивного топлива постоянна и равна /3
в течение временного интервала [0, t±]9 в течение которого масса ракеты уменьшается от то
до mi • Таким образом,
т@) = то, 7tt(£i) = mi,
dm D)
т(£) = m0 - fit, — = -/? для £ < £ь
причем топливо выгорит в момент времени t = t\.
Задача 1. Подставляя выражения из равенств D) в уравнение C), получим
дифференциальное уравнение
dv
(m -0t)—+kv = 0c- (то - f3t)g. E)
Решая это линейное уравнение, находим
гдег;о = г>@)и
v(t) = щМк"> + ^A - Мк">) + |^A - Мк'% F)
т(£) то — mt
М = —— =
то то
обозначает часть массы ракеты в момент времени t.
Сопротивление отсутствует
Задача 2. В случае отсутствия сопротивления воздуха полагаем к = 0 в уравнении E)
и интегрируем его; в результате этого получим
v(t) = v0-gt + cln V-r-. G)
mo — pt
Поскольку mo — /3ti = mi, из этого следует, что скорость ракеты в момент выгорания
топлива (t = ti) равна
vi = v(ti) = vo - gti + cln —. (8)
77li
172 Глава 2. Математические модели и численные методы
Задача 3. Начнем с уравнения G) и проинтегрируем его; в результате получим
y(t) = (vo + c)t - \gt2 - ^(m0 - /ft) Ъ^ГЩ- (9)
Из этого следует, что высота ракеты в момент выгорания топлива равна
У1 = y(tl) = К + c)tl - \gt\ - 2£i In ^. A0)
Задача 4. Ракета V-2, которая использовалась для бомбардировки Лондона во время
Второй мировой войны, имела начальную массу 12 850 кг, из которых 68,5 % приходилось на
топливо. Это топливо, сжигаемое равномерно в течение 70 секунд, выбрасывалось в виде
выхлопных газов со Скоростью 2 км/с. Предположите, что на ракету действует
сопротивление воздуха 1,45 Н на каждый метр в секунду скорости. Затем найдите скорость и высоту V-2
в момент выгорания топлива, предположив, что ракета была запущена вертикально вверх
с поверхности земли.
Безвоздушное пространство
Предположим, наконец, что ракета ускоряется в безвоздушном пространстве, где нет ни
силы тяжести, ни сопротивления, так что д = к = О.Прид = 0 из уравнения (8) следует, что
по мере уменьшения массы ракеты от то до mi ее скорость увеличивается на
Av = vi — vo = cln—. A1)
mi
Заметьте, что Av зависит только от скорости выхлопных газов с и отношения начальной
массы к конечной mo/mi, но не зависит от скорости сжигания /3. Например, если ракета
запускается из состояния покоя (уо = 0)ис= бкм/сито/mi = 20, то ее скорость в момент
выгорания топлива равна v\ = 51п20«15км/с.Такимобразом,есливмоментзапускаракета
имеет большой запас топлива, то она может достичь скоростей, значительно больших, чем
(относительная) скорость ее выхлопных газов.
2.4. Числовая аппроксимация. Метод Эйлера
Это действительно исключение, а не правило, когда дифференциальное уравнение общего
вида
может быть решено точно и в явном виде элементарными методами, подобными тем, которые
обсуждались в главе 1. Например, рассмотрим линейное уравнение
Решение уравнения A) — просто примитивная (неопределенный интеграл) функции е~х .
Но известно, что каждая примитивная функции f(x) = е~х — неэлементарная функция,
2.4. Числовая аппроксимация. Метод Эйлера 173
которая не может быть выражена как конечная комбинация функций, знакомых из
элементарного курса анализа. Следовательно, никакое частное решение уравнения A) нельзя
выразить через конечную комбинацию элементарных функций. Любая попытка
использовать символические методы главы 1 для нахождения простой явной формулы для решения
уравнения A) поэтому обречена на неудачу.
Но есть альтернатива: компьютерный графопостроитель можно запрограммировать так,
чтобы нарисовать интегральную кривую, которая начинается в начальной точке (#о?Уо)
и пытается проложить свой путь вдоль поля направлений данного дифференциального
уравнения у' = f(x, у). Процедура, которую должен выполнить графопостроитель, может быть
описана следующим образом.
• Установить перо графопостроителя в начальной точке (#о, У о) и продвинуться на один
шаг на крошечное расстояние вдоль отрезка, имеющего заданный уравнением наклон
в точке (хо, У о )• Это приведет в точку (х±, у{).
• В точке (ж 1, у\) изменить направление движения пера и теперь переместить его на
крошечное расстояние вдоль отрезка, имеющего заданный уравнением наклон в этой новой
отправной точке (х\, у\). Это приведет к следующей отправной точке (х2,2/2)-
• В точке (х2, у2) снова изменить направление движения пера и теперь переместить его
на крошечное расстояние вдоль отрезка, имеющего заданный уравнением наклон в этой
новой отправной точке (х21 У2)- Это приведет к следующей отправной точке (#з, Уз)-
Рис. 2.4.1 иллюстрирует результат продолжения построения этим способом —
интегральная кривая заменяется последовательностью дискретных прямолинейных отрезков
от одной отправной точки до следующей. На этом рисунке мы видим, что многозвенная
кривая состоит из отрезков, которые последовательно соединяют точки (#о,уоM (#b2/i)>
(#2,2/2), (#з, 2/з)> •• • • Однако теперь давайте предположим, что каждое перемещение
пера на "крошечное расстояние" вдоль отрезка, наклон которого определяется уравнением,
настолько мало, что невооруженный глаз не может отличить отдельные звенья,
составляющие многоугольную ломаную кривую. Тогда полученная многоугольная кривая напоминает
гладкую, непрерывно изменяющую направление интегральную кривую
дифференциального уравнения. Действительно, в сущности именно так компьютер построил большую часть
интегральных кривых, показанных на рисунках в главе 1.
Эйлер не имел компьютерного графопостроителя (в XVIII столетии!), и ему пришлось
воплотить эту идею в цифровой форме, а не графически. Чтобы найти приближенное решение
задачи Коши (задачи с начальными условиями)
dv
> ~j^= f{x, у), у{х0) = 2/о, B)
мы сначала выбираем постоянную величину шага h по (горизонтальной) оси, а затем
используем ее на каждом шаге создания звена ломаной, соединяющего предыдущую точку
со следующей. Предположим, мы начали в начальной точке (хо ,уо)и после п шагов достигли
точки (хп, уп). Тогда шаг от (хп, уп) к следующей точке {хп+\, t/n+i) показан на рис. 2.4.2.
Наклон отрезка, проходящего через точку (хП1 уп), равен т = f(xn, уп)- Следовательно,
горизонтальное изменение /ютхпк xn+i соответствует вертикальному изменению m-h =
= h- f(xn,yn) от уп до 2/п+ь Поэтому координаты новой точки (xn+i, yn+i) выражаются
через старые координаты так:
хп+1 = хп + h, yn+i =yn + h- j{xnyyn).
174 Глава 2. Математические модели и численные методы
Интегральная/
кривая
,уь)&'У1)
*С*2, у2)
г(*з> Уз)
Наклон
F(xn, у,
(Хп, Уп)
(Хп+h Уп)
Рис. 2.4.1. Несколько первых
шагов при приближенном
построении интегральной кривой
Рис. 2.4.2. Шаг от (хп,уп)
K(xn+i,2/n+i)
Предположим, мы хотим решить задачу Коши (задачу с начальными условиями) B)
методом Эйлера, задав величину шага h. Тогда мы начинаем двигаться из начальной точки
(#о, У о)и применяем формулы
xi=x0 + h yi=yo + h- f(x0,2/o)
х2 = xi + h y2 = 2/i + h • f(xi,yi)
xs=x2 + h y3 = y2 + h' f(x2,2/2)
для вычисления последовательности точек (xi, 2/1), (х2, у2)9 (#з, 2/з), • • • на приближении
интегральной кривой.
Однако обычно мы не рисуем набросок соответствующей многоугольной
аппроксимации. Вместо этого обычно мы получаем числовой результат применения метода Эйлера —
последовательность аппроксимаций
Уъ 2/2,2/3,
,2/я
к точным значениям
V(xi)by(x2), у(х3), • • •, у(хп),...
в точках a?i, #2, жз, ' Хп"> • • • точного (хотя и неизвестного) решения у(х) задачи Коши
(задачи с начальными условиями). Эти результаты обычно представляются в форме таблицы
приближенных значений искомого решения.
АЛГОРИТМ
Решая задачу Коши (задачу с начальными условиями)
w dy
dx
= /(ж,2/), у(х0) =2/о,
B)
методом Эйлера, сначала выбираем величину шага /i, а затем повторно применяем
формулу
2М+1 = Уп + h • /(хп, Уп) (п > 0)
C)
2.4. Числовая аппроксимация. Метод Эйлера 175
для вычисления последовательных приближений t/i, уг, Уз» • • • к [точным] значениям у(х\),
у(х2)9 у(хз), • • • [точного] решения у = у(х) в точках х\9 #2, #з, • • •, соответственно. А
Повторное применение формулы C) позволяет сделать шаг от уп к yn+i • Это и есть
главный "двигатель" метода Эйлера. Хотя самые важные приложения метода Эйлера относятся
к нелинейным уравнениям, мы сначала проиллюстрируем метод для простой задачи Коши
(задачи с начальными условиями), точное решение которой известно. Затем мы сравним
приближенное и точное решения.
Пример 1
Решение
Применим метод Эйлера для вычисления приближенного решения
задачи Коши (задачи с начальными условиями)
dy 1
2/@) = -3,
D)
(a) сначала выберем величину шага h = 1 на интервале [0,5],
(b) затем выберем величину шага h — 0,2 на интервале [0,1].
(а) Для хо = 0,2/о = —3, /(ж, у)=х+^уи!г=1 итеративная
формула C) дает приближенные значения
I/i = Уо + Л • [ж0 + £уо] = (-3) + A)[0 + £(-3)] = -3,6,
V2 = yi+h-[x! + \У1] = (-3,6) + A)[1 + £(-3,6)] = -3,32,
Уз = У2 + h • [х2 + £у2] = (-3,32) + A)[2 + £(-3,32)] = -1,984,
УА = Уз + h • [хз + £уз] = (-1,984) + A)[3 + £(-1,984)] = 0,6192 и
Уъ = У4 + h • [х4 + £у4] = @,6912) + A)[4 + £@,6912)] « 4,7430
в точках xi = 1,Х2 = 2,хз = 3,^4 = 4ихб = 5. Обратите внимание, что
результат каждого вычисления используется в следующем шаге. Ниже
приведена таблица приближенных значений
X
Приближенное значение у
0
-3
1
-3,6
2
-3,32
3
-1,984
■ 4
0,6912
5
4,7430
На рис. 2.4.3 показан график этой аппроксимации, вместе с графиками
аппроксимаций Эйлера, полученных при величине шага h = 0,2 и 0,05,
а также график точного решения
у{х) = 22е*/5 - 5х - 25,
которое легко найти, используя метод решения линейного уравнения,
описанный в разделе 1.5. Мы видим, что уменьшение шага
увеличивает точность, но после очередной аппроксимации точность уменьшается.
Таким образом, точность уменьшается по мере удаления от начальной
точки.
176
Глава 2. Математические модели и численные методы
Рис. 2.4.3. Графики аппроксимаций Эйлера при
величине шага h = 1, h = 0,2 и h = 0,05
(b) Начиная заново с хо = 0, уо =
получаем приближенные значения
-3, /(я, у) = х + \у и h = 0,2, мы
yi = yo + h.[x0 + Ы = (-3) + @,2)[0 + £(-3)] = -3,12,
У2 = У1 + Н.[хг + iyil = (-3,12) + @,2)[0,2 + И-3'12)] « -3>205>
Уз = У2 + h - [х2 + ±</2] « (-3,205) + @,2)[0,4 + ±(-3,205)] « -3,253,
2/4 = Уз + Л ; [а* + \уз] « (-3,253) + @,2)[0,6 + £(-3,253)] « -3,263,
Уъ = УА + Л • [а?4 + £у4] « (-3,263) + @,2)[0,8 + J(-3,263)] « -3,234
в точках xi = 0,2, #2 = 0,4, £3 = 0,6, х± = 0,8 и #5 = 1. Ниже приведена
таблица приближенных значений.
X
Приближение у
0
-3
0,2
-3,12
0,4
-3,205
0,6
-3,253
0,8
-3,263
1
-3,234
Чтобы с помощью метода Эйлера достичь высокой точности, обычно требуется очень
малый шаг, а следовательно, и большое количество шагов — обычно большее, чем может
быть выполнено вручную. Поэтому в приложении к этому разделу приведены программы для
калькулятора и компьютера, чтобы вы могли автоматизировать метод Эйлера. Одна из этих
программ использовалась, чтобы вычислить данные, приведенные в таблице на рис. 2.4.4.
Мы видим, что 500 шагов в методе Эйлера (величина шага h = 0,002) от х — 0 до х — 1
дают значения, погрешность которых не превышает 0,001.
Пример 2
Предположим, что бейсбольный мяч из примера 3 в разделе 1.3 просто
выпадает (а не выбрасывается вниз) с вертолета. Тогда его скорость v(t)
после t секунд является решением задачи Коши (задачи с начальными
2.4. Числовая аппроксимация. Метод Эйлера 177
условиями)
dv
— = 32 - 0,16v, v@) = 0. E)
at
Мы используем метод Эйлера при h = 1, чтобы проследить увеличение
скорости шара на интервалах длительностью 1 секунда в течение первых
10 секунд падения. При t0 = 0, v0 = 0, F(t, v) = 32 — 0,16г> и /г = 1
итеративная формула C) дает приближенные значения
Vl = Vo + ^ . [32 - 0,16t7O] = @) + A)[32 - 0,16@)] = 32,
V2 = Vl + h • [32 - ОДбгл] = C2) + A)[32 - 0,16C2)] = 58,88,
t73 = t* + Л • [32 - 0,16^2] = E8,88) + A)[32 - 0,16E8,88)] » 81,46,
v4 = v3 + Л • [32 - 0,16tfc] = (81,46) + A)[32 - 0,16(81,46)] « 100,43 и
Vh = V4 + h • [32 - 0,16v4] = A00,43) + A)[32 - 0,16A00,43)] « 116,36.
Продолжая этим способом, мы заполняем для /i = 1 столбец значений v,
приведенный в таблице на рис. 2.4.5, где мы округлили значения скорости
к самому близкому целому числу футов в секунду. Значения,
соответствующие h = 0,1, были рассчитаны с помощью компьютера, и мы видим,
что их погрешность не превышает 1 фута в секунду. Обратите внимание
также на то, что после 10 секунд падающий шар достиг приблизительно
80 % его предельной скорости 200 футов в секунду. ■
т
0
0,2
0,4
0,6
0,8
1
Приближение к у
три h ж ОД
-3,000
-3,120
-3,205
-3,253
-3,263
-3,234
Приближение к у
при h = 0,02 „
-3,000
-3,104
-3,172
-3,201
-3,191
-3,140
Приближение к у
при h » 0,002
-3,000
-3,102
-3,168
-3,196
-3,184
-3,130
4 Тачное
значение у
-3,000
-3,102
-3,168
-3,195
-3,183
-3,129
Рис. 2.4.4. Аппроксимации Эйлера при величине шага h = 0,2, h = 0,02 и h =
= 0,002
Локальные погрешности и накопление ошибок
В методе Эйлера есть несколько источников погрешности, из-за которых аппроксимация
уп к у(хп) может быть ненадежной для больших значений п, т. е. для тех, для которых хп
расположено достаточно далеко от xq. Причина ошибки в линейной аппроксимирующей
формуле
у(хп+1) &yn + h- f(xni уп) = 2/n+i F)
состоит в том, что касательная в точке (хп, уп) не совпадает с интегральной кривой,
проходящей через точку (жп, уп), как показано на рис. 2.4.6. Эту ошибку, неизбежную в каждом
шаге процесса, называют локальной ошибкой метода Эйлера.
178 Глава 2. Математические модели и численные методы
t -
1
2
3
4
5
6
7
8
9
10
Приближение к v
'' '* при/г - 1'""
32
59
81
100
116
130
141
150
158
165
Приближение kv
щрш к** 0,1
30
55
77
95
111
124
135
145
153
160
Точное
значениеv
30
55
76
95
110
123
135
144
153
160
Рис. 2.4.5. Аппроксимации Эйлера в примере 2 для величины шага h = 1
и/i = 0,l
Локальная ошибка, показанная на рис. 2.4.6 была бы полной (суммарной) погрешностью
(ошибкой) в точке уп+1, если бы отправное значение уп в F) было бы точным значением,
а не представляло собой просто аппроксимацию к фактическому значению у{хп). Но само
значение уп зависит ото всех локальных ошибок, накопленных в предыдущих шагах. Таким
образом, касательная на рис. 2.4.6 касается "совсем не той" интегральной кривой — той,
которая проходит через (хп, уп)9 а не настоящей интегральной кривой, проходящей через
начальную точку (хо,уо)- Рис. 2.4.7 иллюстрирует эту накопленную ошибку в методе
Эйлера; она представляет собой расстояние, на которое многозвенная ломаная, выходящая
из точки (хо,уо), отклоняется от фактической интегральной кривой, проходящей через точку
(яо,1/о).
Обычно, чтобы уменьшить накопленную (суммарную) ошибку в методе Эйлера, нужно
уменьшить величину шага h. В таблице на рис. 2.4.8 приведены результаты, полученные
при приближении точного решения у (х) — 2ех — х — 1 задачи Коши (задачи с начальными
условиями)
1-х + у, 2/@) = 1,
.. Локальная
/ошибка
Рис. 2.4.6. Локальная ошибка в методе Эйлера
2.4. Числовая аппроксимация. Метод Эйлера
179
Приближенные
х0 хх х2 *з хп
Рис. 2.4.7. Накопленная ошибка в методе Эйлера
с помощью последовательного уменьшения величины шага h = 0,1, h = 0,02, h = 0,005
и h = 0,001. Мы приводим вычисленные значения только с промежутком Ах = 0,1.
Например, при h = 0,001 вычисление требовало 1000 шагов метода Эйлера, но приведены только
те значения уп, для которых число п кратно 100, так что при этом хп окажется кратным 0,1.
■$№&%№.К
„„„„U/iIu'lnna.Mii,,';, ,1йЪ,к'Ъ*АшЬ'« U<jLl,'lM*,:iu*",Lm*l ..„„fnn, ",к Ним iW, ^А„Ш,тЛи,ш Ш и .ГГ., ,.', „
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
1,1000
1,2200
1,3620
1,5282
1,7210
1,9461
2,1974
2,4872
2,8159
3,1875
1,1082
1,2380
1,3917
1,5719
1,7812
2,0227
2,2998
2,6161
2,9757
3,3832
1,1098
1,2416
1,3977
1,5807
1,7933
2,0388
2,3205
2,6422
3,0082
3,4230
1,1102
1,2426
1,3993
1,5831
1,7966
2,0431
2,3261
2,6493
3,0170
3,4238
1,1103
1,2428
1,3997
1,5836
1,7974
2,0442
2,3275
2,6511
3,0192
3,4266
Рис. 2.4.8. Приближеннные решения уравнения dy/dx = х + у, у@) = 1, полученные
при последовательном уменьшении шага
180 Глава 2. Математические модели и численные методы
Просматривая столбец на рис. 2.4.8, мы замечаем, что для каждой фиксированной
величины шага h ошибка 2/точн — i/прибл увеличивается по мере удаления х от отправной точки
хо = 0. Но просматривая строки таблицы, мы видим, что для каждого фиксированного х
ошибка уменьшается по мере уменьшения величины шага h. Ошибки (в процентах) в
конечной точке х = 1 убывают от 7,25% при h = 0,1 до всего лишь 0,08% при h = 0,001.
Таким образом, чем меньше шаг, тем медленнее растет ошибка при увеличении расстояния
от отправной точки.
Столбец данных для шага h = 0,1 на рис. 2.4.8 требует только 10 шагов, так что
вычисления по методу Эйлера можно выполнить на карманном калькуляторе. Но чтобы достичь
х — 1, требуется 50 шагов при h = 0,02, а при h = 0,005 — 200 шагов и 1000 шагов —
при h = 0,001. Поэтому чтобы провести вычисления по методу Эйлера, когда требуются
более чем 10 или 20 шагов, почти всегда используется компьютер. Как только была написана
соответствующая компьютерная программа, величина шага в принципе перестала играть
решающую роль в удобстве вычислений; в конце концов, для компьютера количество шагов
не принципиально.
Почему же тогда мы не выбираем чрезвычайно маленький шаг (например h = 10~12),
чтобы достичь очень большой точности? Есть две причины для того, чтобы так не делать.
Первая очевидна — время, требуемое для вычисления. Например, данные на рис. 2.4.8 были
получены с помощью карманного калькулятора, который выполнял девять шагов метода
Эйлера в секунду. Таким образом, требуется немного больше одной секунды, чтобы найти
приближение уA) при h = 0,1 и приблизительно 1 минута 50 секунд при h — 0,001. Но при
h = 10~12 это потребовало бы более чем 3000 лет!
Вторая причина является более тонкой. В дополнение к предварительно обсужденным
локальным и накопленным ошибкам, сам компьютер вносит ошибку округления на каждом
шаге, потому что в каждом вычислении может использоваться только конечное число
значащих разрядов. Вычисление по методу Эйлера при h = 0,0001 вносит ошибки округления
в 1000 раз чаще, чем такое же вычисление при h = 0,1. Следовательно, для некоторых
дифференциальных уравнений h = 0,1 фактически может дать более точные результаты, чем
полученные при h = 0,0001, потому что эффект накопления ошибок округления в таком
случае может превысить суммарный эффект накопления ошибок метода и ошибок округления
в случае h = 0,1.
На практике, так же как и в теории, трудно определить "наилучшее" значение h. Оно
зависит от природы функции /(#, у) в задаче Коши (задаче с начальными условиями) B), от
точности кода программы и от конкретного типа компьютера. Если ищг слишком большой,
аппроксимации, выполненные по методу Эйлера, не будут достаточно точными, тогда как
если h является слишком маленьким, то могут накопиться ошибки округления или программа
может требовать слишком много времени для выполнения. Тема распространения ошибок
в числовых алгоритмах рассматривается в курсах и учебниках численного анализа.
Вычисления на рис. 2.4,8 иллюстрируют общую стратегию применения численного
алгоритма, такого как метод Эйлера. Сам алгоритм выполняется несколько раз. Сначала нужно
выбрать количество п подынтервалов для первого применения алгоритма. Затем следует
удвоить п для каждого последующего применения метода. Визуальное сравнение
последовательных результатов часто может обеспечить "интуитивное чувство уверенности" в
точности полученных результатов. В следующих двух примерах мы представляем графически
результаты последовательных применений метода Эйлера.
2.4. Числовая аппроксимация. Метод Эйлера 181
Пример 3
Точное решение логистического уравнения в задаче Коши (задаче с
начальными условиями)
^ = Ы8"»). 2/@) = 1
представляет собой функцию у(х) = 8/A + 7е_8х/3). На рис. 2.4.9
показаны точная интегральная кривая и приближенные интегральные кривые,
полученные применением метода Эйлера на интервале 0 ^ х ^ 5прираз-
биенииегонап = 5,п = 10 и п = 20 подынтервалов. Каждая из этих
"кривых" фактически состоит из отрезков, соединяющих последовательные
точки (хп,уп) и (xn+i, 2/n+i)- Аппроксимация Эйлера с 5
подынтервалами плоха, а аппроксимация с 10 подынтервалами также весьма неточна,
поскольку перескакивает за предельное значение у = 8 для решения
перед выравниванием, но вот при 20 подынтервалах мы получаем довольно
хорошее качественное совпадение с фактическим поведением решения. ■
Пример 4
Точное решение задачи Коши (задачи с начальными условиями)
dy
— =ycosx, 2/@) = 1
ах
представляет собой периодическую функцию )j(x) = esmx. На
рис. 2.4.10 показаны точная интегральная кривая и приблизительные
интегральные кривые, полученные применением метода Эйлера на
интервале 0 ^ х ^ б7гдляп = 50, п = 100, п = 200 и п = 400 подынтервалов.
Даже при таком большом количестве подынтервалов метод Эйлера
испытывает значительные трудности в попытках не отстать от колебаний
в фактическом решении. Следовательно, для серьезных числовых
исследований необходимы более точные методы, рассматриваемые в
последующих разделах. - ■
Предостережение
Данные, приведенные на рис. 2.4.8, показывают, что методом Эйлера можно найти хорошее
приближение решения задачи Коши dy/dx = х + у, у@) = 1 на интервале [0,1]. Иными
словами, для каждого фиксированного х оказывается, что приближенные значения
приближаются к фактическому значению у(х) при уменьшении величины шага h. Например,
приближенные значения в строках, соответствующих х = 0,3 их = 0,5, равны у@,3)« 1,40
и 2/@,5)«1,80, т. е. весьма близки к фактическим значениями, приведенным в
заключительном столбце таблицы.
Пример 5, напротив, показывает, что некоторые задачи Коши (задачи с начальными
условиями) ведут себя совсем не так хорошо.
Пример 5
Используем метод Эйлера, чтобы найти приближенное решение задачи
Коши (задачи с начальными условиями)
£ = *2 + гД 2/@)^1 G)
на интервале [0,1].
Глава 2. Математические модели и численные методы
Рис. 2.4.9. Приближение
решения логистического уравнения
с помощью метода Эйлера для
п = 5, п = 10 и п = 20
подынтервалов
Рис. 2.4.10. Приближение
точного решения у = е8ШЖ с
помощью метода Эйлера для 50, 100,
200 и 400 подынтервалов
Решение Здесь /(#, у) = х2 + у2, так что итеративная формула метода Эйлера
принимает вид
Уп+1 =yn + h'{x2n+y2n). (8)
При величине шага ft = ОД мы получаем
" ' 2/1 = 1 + (ОД) • [(ОJ + {If) = 1,1,
у2 = 1,1 + (ОД) • [(ОДJ + A,1J] = 1,222,
уз - 1,222 + (ОД) • [@,2J + A,222J] « 1,3753,
и т. д. Округляя к четырем десятичным знакам первые десять значений,
полученных по этому способу, получаем
2/1 = 1,1000
2/2 = 1,2220
2/з = 1,3753
2/4 = 1,5735
2/5 = 1,8371
2/6 = 2,1995
2/7 = 2,7193
2/8 = 3,5078
2/9 = 4,8023
2/ю = 7,1895
Но, вместо того чтобы наивно принимать эти результаты как
достаточно точные аппроксимации, мы решили использовать компьютер, чтобы
повторить вычисления с меньшими значениями h. В таблице нарис. 2.4.11
приведены результаты, полученные для величины шага h = ОД, ft = 0,02
и h = 0,005. Заметьте, что теперь "устойчивость" метода, отмеченная
в примере 1, отсутствует. Действительно, кажется очевидным, что кое-
что идет не так, как надо, в окрестности точки х — 1.
Нарис. 2.4.12 это затруднение продемонстрировано графически. Здесь
показано поле направлений уравнения dy/d<x = х2 + у2 вместе с
интегральной кривой, проходящей через точку @,1). (График был
нарисован с использованием одного из более точных методов аппроксимации,
2.4. Числовая аппроксимация. Метод Эйлера 1ВЗ
упри ':уЩМ'-'
а?
од
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
&-38S/04
1,1000
1,2220
1,3753
1,5735
1,8371
2,1995
2,7193
3,5078
4,8023
7,1895
'.'А'&б-ДО' :
1,1088
1,2458
1,4243
1,6658
2,0074
2,5201
3,3612
4,9601
9,0000
30,9167
Рис. 2.4.11. Попытка найти прибл
ние задачи Коши dy/dx = х2 -f у2,
рассмотренных в следующих двух разделах.) Оказывается, что эта
интегральная кривая имеет вертикальную асимптоту в окрестности точки
х = 0,97. Действительно, используя точное решение, в которое входят
функции Бесселя (подробнее—в задаче 16 в разделе 8.6), можно показать,
что у(х) —> -Ьоо при х —► 0,969811 (приблизительно). Хотя метод
Эйлера дает значения (поддельные) в точке х = 1, фактически решение не
существует на всем интервале [0,1]. Кроме того, метод Эйлера не
позволяет эффективно учитывать быстрые изменения функции у (х), которые
происходят, когда х приближается к точке, в которой функция терпит
бесконечный разрыв (при значении аргумента, близком к 0,969811). ■
Мораль примера 5 состоит в том, что при численном решении некоторых задач Коши
(задач с начальными условиями) можно угодить в ловушки. Конечно, бессмысленно пытаться
найти приближенное решение на интервале, если оно там не существует (или если оно не
единственно, ведь тогда нет никакого общего способа предсказать, по какому пути пойдут
числовые аппроксимации в окрестностях точки, где отсутствует единственность). Нельзя
считать точными результаты, полученные методом Эйлера для единственной
фиксированной величины шага ft. Повторное выполнение с меньшей величиной шага (/г/2, скажем, или
ft/5, или ft/Ю) может дать похожие результаты, таким образом подтверждая их точность,
или, как в примере 5, может показать некоторую скрытую трудность в задаче. Для
решения многих задач просто требуются более точные и мощные методы, которые обсуждаются
в последних двух разделах этой главы.
2.4. Задачи
В задачах 1-10 поставлена задача Коши (задача с начальными условиями) и приведено ее точное
решение у(х). Дважды применяя метод Эйлера, найдите приближение к этому решению на
интервале [0, |], — сначала с величиной шага ft = 0,25> а затем с величиной шага ft — ОД. Сравните
а «оде
1,1108
1,2512
1,4357
1,6882
2,0512
2,6104
3,5706
5,5763
12,2061
1502,2090
енное реше-
0 = 1
Рис. 2.4.12. Решение задачи
ix = х2 + у2, ?/@) = 1
184 Глава 2. Математические модели и численные методы
значения с тремя десятичными знаками этих двух аппроксимаций в точке х = \ с фактическим
значением у{\) точного решения.
1. У'
3.
5. у
7. У
9. у'
= |A + У2), 2/@) = 1; у(х) = tg \{х + тг)
= -2/, 2/@) = 2; 2/(х) = 2е~х 2. у' = 2у, 2/@) = ±; 2/(х) = §е2ж
= у + 1,2/@) = 1; у(ж) = 2ех - 1 4. 2/' = х - у, 2/@) = 1; у(х) = 2е~ж + х - 1
= 2/ - х - 1,2/@) = 1; 2/(х) = 2 + х - еж 6. у' = -2ху, у@) = 2; 2/(х) = 2e"*2
= -Зх2у, 2/@) = 3; у(х) = Зе"*3 8. 2/' = е~у, 2/@) = 0; у(х) = 1п(х + 1)
10. 2/' = 2ху2,2/@) = 1; 2/(х) = y-f^j
Обратите внимание. В приложении после этого набора задач приведены иллюстративные
программы для калькулятора или компьютера, которые могут использоваться при решении остальных
задач.
Программируемый калькулятор или компьютер будут полезны при решении задач 11-16. В каждой
задаче найдите точное решение данной задачи Коши (задачи с начальными условиями). Затем
дважды примените метод Эйлера, чтобы найти приближение (с четырьмя десятичными знаками)
к этому решению на данном интервале, — сначала при величине шага h — 0,01, а затем при величине
шага h = 0,005. Сделайте таблицу, в которой приведите приближенные значения и фактическое
значение, а также ошибку в процентах для более точной аппроксимации. Значения х в таблице
возьмите кратными 0,2. Штрихи всюду обозначают производные по х.
11. yf = y-2,2/@) = 1;0 £ х £ 1 12. у' = \{у - IJ, у@) = 2;0 ^ х ^ 1
13. 2/2/ = 2х3,2/A) = 3; 1 ^ х ^ 2 14. ху' = у29 2/A) = 1; 1 й х ^ 2
15. ху' = Зх - 22/, 2/B) = 3; 2 й х <. 3 16. у2у' = 2х5,2/B) = 3; 2 ^ ж ^ 3
Для решения задач 17-24 требуется компьютер с принтером. В этих задачах для решения задачи
Коши (задачи с начальными условиями) используйте метод Эйлера с величиной шага h = 0,1, 0,02,
0,004 и 0,0008, чтобы приблизить с точностью четырех десятичных знаков значения решения
в десяти точках, разбивающих данный интервал на равные подынтервалы. Напечатайте
результаты в табличной форме с соответствующими заголовками, чтобы легко наблюдать эффект
изменения величины шага h. Штрихи всюду обозначают производные по х.
17. у' = х2 + у2,2/@) = 0; 0 ^ х ^ 1 18. у' = х2 - у2,2/@) = 1; 0 ^ х ^ 2
19. у' = х + у/у, 2/@) = 1; 0 ^ х ^ 2 20. у' = х + $/у, 2/@) = -1; 0 й х <. 2
21. у' = In 2/, 2/A) = 2; 1 ^ х ^ 2 22. j/ = х2/3 + у2/39 2/@) = 1; 0 £ х ^ 2
23. у' = sinx + cosy, 2/@) = 0; 0 < х £ 1 24. у' = Ж 2, у(-1) = 1; -1 ^ х ^ 1
25. Вы прыгаете из вертолета (как в примере 2) и немедленно дергаете вытяжной трос вашего
парашюта. Теперь к = 1,6 в уравнении E), так что ваша убывающая скорость является решением
задачи Коши (задачи с начальными условиями)
-j- = 32 - l,6v, v@) = 0
at
(причем t измеряется в секундах и г; в футах в секунду). Используйте программируемый
калькулятор или компьютер, чтобы методом Эйлера найти приближенное решение для 0 й t ^ 2,
2.4. Числовая аппроксимация. Метод Эйлера 185
сначала с величиной шага h = 0,01, а затем с h = 0,005, округляя приближенные значения г;
к одному десятичному знаку. Какой процент от предельной скорости 20 футов в секунду будет
достигнут через 1 секунду? А через 2 секунды?
26. Предположим, что численность P(t) популяции оленей в маленьком лесу первоначально равна
25 и удовлетворяет логистическому уравнению
^ = 0,0225Р - 0,0003Р2
at
(t в месяцах). Используйте программируемый калькулятор или компьютер, чтобы методом
Эйлера найти приближенное решение.на интервале длительностью 10 лет, сначала с величиной
шага h = 1, а затем с h = 0,5, округляя приближенные значения Р к целому числу оленей.
Какой процент от предельной численности популяции G5 оленей) будет достигнут через 5 лет?
А через 10 лет?
Используйте метод Эйлера с компьютерной системой, чтобы найти искомые значения решения
в задачах 27 и 28. Начните с величины шага h = 0,1, а затем последовательно используйте
меньшие величины шага, пока последовательность приблиэюенных значений для решения в точке
х = 2 не стабилизируется после округления к 2 десятичным знакам.
27. у' = х2 + у2 - 1,2/@) = 0; уB) = ? 28. у' = х + §</2, у(-2) = 0; уB) = ?
29. Рассмотрим задачу Коши (задачу с начальными условиями)
(а) Решите эту задачу и найдите точное решение
1
х
^) = -^Т77'
которое терпит бесконечный разрыв в точке х = 0. (Ь) Применяя метод Эйлера при
величине шага h = 0,15, найдите приближение к этому решению на интервале — 1 й х ^ 0,5.
Обратите внимание, что, глядя на эти данные, вы не могли подозревать ни о какой трудности
в окрестности х = 0. Причина состоит в том, что числовая аппроксимация перескакивает через
точку разрыва к другому решению 7ху' + у = 0 для х > 0. (с) Наконец, примените метод
Эйлера при величине шага h = 0,03 и h = 0,006, но печатайте результаты только в точках
х = —1,00, —0,85, —0,70, ..., 1,20, 1,35. и 1,50. Вы теперь можете заподозрить, что функция,
определяемая той же формулой, что и точное решение, терпит разрыв?
30. Примените метод Эйлера с последовательно уменьшающимися величинами шага на
интервале [0,2], чтобы опытным путем проверить, что решение задачи Коши (задачи с начальными
условиями)
g=*2+2A 2,@) = 0
имеет вертикальную асимптоту в окрестности х = 2,003147. (Сопоставьте это с примером 2,
в котором 2/@) = 1.)
31. Общее решение уравнения
^ = (l+2/2)cosx
дает функция у(х) = tg(C-hsinx). Для начального условия 2/@) = 0 решение у(х) = tg(sinar)
ведет себя хорошо. Но для 2/@) = 1 это решение у(х) = tg (|7Г 4- sin x) имеет вертикальную
асимптоту в точке х = arcsinGr/4) « 0,90334. Используйте метод Эйлера, чтобы проверить
этот факт опытным путем.
186 Глава 2. Математические модели и численные методы
2.4. Приложение. Реализация метода Эйлера
Построение программы для калькулятора или компьютера, реализующей числовой
алгоритм, помогает глубже понять алгоритм. На рис. 2.4.13 представлены программы на входном
языке калькулятора TI-85 и на языке BASIC, позволяющие методом Эйлера найти
приближенное решение задачи Коши (задачи с начальными условиями)
dy
V@) = 1,
рассмотренной в этом разделе. Комментарии в заключительном столбце должны сделать
эти программы понятными, даже если вы совсем мало знакомы с языком программирования
BASIC и калькулятором TI.
, BASIC
PROGRAM:EULER
:10-+N
: 0-ОС
:1->Y
:1->Х1
: (X1-X)/N->H
:For (I,1,N)
:X+Y->F
:Y+H*F->Y
: X+H-+X
:Disp X,Y
:End
Program EULER
N = 10
X = 0
Y = 1
XI = 1
H = (Xl-X)/N
FOR 1=1 TO N
F = X + Y
Y = Y + H*F
X = X + H
PRINT X,Y
NEXT I
Заголовок программы
Количество шагов
Начальное значение х
Начальное значение у
Конечное значение х
Величина шага
Начало цикла
Значение функции
Итерация Эйлера
Новое значение х
Отобразить результаты
Конец цикла
Рис. 2.4.13. Программы, реализующие метод Эйлера на языках TI-85 и BASIC
Чтобы увеличить количество шагов (и таким образом уменьшить величину шага), нужно
только изменить значение N, указанное в первой строке программы. Чтобы применить метод
Эйлера к другому уравнению вида dy/dx = /(#, у), нужно только изменить единственную
строку, в которой вычисляется значение функции F.
На любом другом процедурном языке программирования (таком как ФОРТРАН или
Pascal), следуя образцам, показанным на рис. 2.4.13 для входного языка калькулятора TI-85
и языка программирования BASIC, можно запрограммировать метод Эйлера. Некоторые
современные языки функционального программирования даже содержат операторы, более
близкие к стандартной системе математических обозначений. На рис. 2.4.14 показана
реализация метода Эйлера на входном языке системы MATLAB. Функция euler в качестве
входных параметров принимает начальное значение х, начальное значение у, конечное
(последнее) значение xl переменной х и желаемое количество п подынтервалов. Например,
команда MATLAB
[X, Y] = euler@, 1, 1, 10)
2.5. Более подробный анализ метода Эйлера 187
вычисляет значения хп и уп, приведенные в первых двух столбцах таблицы на рис. 2.4.8.
Вы должны реализовать метод Эйлера на вашем собственном калькуляторе или
компьютере. Сначала проверьте вашу программу, применив ее к задаче Коши (задаче с начальными
условиями) из примера 1, а затем к некоторым другим задачам из этого раздела.
Исследование знаменитых чисел
Следующие задачи описывают числае«2,71828,1п 2^0,69315 И7г«3,14159,как конкретные
значения решений некоторых задач Коши (задач с начальными условиями). В каждом случае
примените метод Эйлера для п = 50,100,200,... подынтервалов (удваивая п каждый раз).
Сколько подынтервалов необходимо для получения (дважды подряд) правильного значения
вычисляемого числа, округленного к трем десятичным знакам?
1. Число е — уA), где у(х) — решение задачи Коши (задачи с начальными условиями)
dy/dx = y,y@)=l.
2. Число In 2 = уB),гдеу(ж)— решение задачи Коши (задачи с начальнымиусловиями)
dy/dx = 1/х, уA) = 0.
3. Число 7г = уA), где у{х) — решение задачи Коши (задачи с начальными условиями)
dy/dx = 4/A + ж2),у@) = 0.
В каждой задаче также объясните, почему именно данное знаменитое число является
значением решения соответствующей задачи Коши.
2.5. Более подробный анализ метода Эйлера
Метод Эйлера в том виде, в каком он представлен в разделе 2.4, нечасто используется на
практике, главным образом потому, что есть более точные методы. Но метод Эйлера имеет
преимущество, так как проще других методов, а тщательное изучение этого метода приводит
function ур = f(x,y)
ур = х + у; % ур = у'
function [X,Y] = euler(х,у,xl,п)
h = (xl - х)/п; % величина шага
X = х; % начальное значение х
% начальное значение у
% начало цикла
% итерация Эйлера
% новое значение х
% обновить столбец х
% обновить столбец у
% конец цикла
Y =
for
у;
i =
У =
х =
X =
Y =
end
1:п
у + h*f(x,
х + h;
[Х;х];
[Y;y];
>у);
Рис. 2.4.14. Реализация метода Эйлера с помощью пакета Matlab
t88 Глава 2. Математические модели и численные методы
к пониманию работы более точных методов, потому что многие из лих представляют собой
усовершенствования или уточнения метода Эйлера.
, Чтобы сравнить два различных метода числовой аппроксимации, необходим способ
измерения точности каждого метода. Теорема 1 указывает степень точности метода Эйлера.
Теорема 1
Ошибка метода Эйлера
Предположим, что задача Коши (задача с начальными условиями)
dv
-^ = ffay), у(х0) = у0 (!)
имеет единственное решение у (х) на замкнутом интервале [а, Ь], причем а = хоиу(х) имеет
непрерывную вторую производную на [а, Ь]. (Это действительно так, если функции /, fx
и fy непрерывны в прямоугольнике a^x^bnc^y^d, где с ^ у(х) ^ d для всех х
из [а, Ъ}.) Тогда существует константа С такая, что истинно следующее утверждение. Если
аппроксимации уь у2, уз, • • •, Ук к фактическим значениям у(хг), у(х2)9 у(ж3),..., у{хк)
в точках интервала [а, Ъ) вычислены методом Эйлера с величиной шага h > 0, то
\Vn-v(xn)\UCh B)
для каждого п = 1,2,3,..., к. А
Замечание. Ошибка
2/факт 2/прибл == У\Хп) Уп
в B) обозначает [совокупную] ошибку (погрешность) метода Эйлера после п шагов
аппроксимации, но не учитывает ошибок округления (т. е. учитывает только те ошибки, которые
мы сделали бы и в том случае, если использовали бы точную машину, которая не делала
бы ошибок округления). Утверждение теоремы можно кратко сформулировать так: ошибка
метода Эйлера имеет порядок h; иными словами, ошибка ограничена [предопределенной]
константой С, умноженной на величину шага h. Отсюда следует, например, что (на данном
замкнутом интервале) в результате деления на два величины шага максимальная ошибка
также уменьшится вдвое; точно так же, выбирая величину шага /г/10, мы повышаем точность
в 10 раз (т. е. новая максимальная ошибка составит 1/10 часть максимальной ошибки при
прежней величине шага К). Следовательно, в принципе мы можем достичь любой желаемой
точности, выбирая h достаточно малым. ■
Мы опустим доказательство этой теоремы. Его можно найти в главе 7 книги Г. Биркгофа
и Г. Рота, посвященнойобыкновенным дифференциальным уравнениям, 4-е издание которой
вышло в 1989 году (G. Birkhoffand G.-C. Rota, Ordinary Differential Equations, 4th ed. (New
York: John Wiley, 1989)). Константа С заслуживает некоторого комментария. Поскольку С
имеет тенденцию увеличиваться так же, как увеличивается максимальное значение \у"(х) \
на [а, 6], зависимость С от у довольно сложная, и на практике вычислить значение С, при
котором выполняется неравенство B), обычно не удается. На практике обычно используется
следующая процедура. \
1. Применить метод Эйлера к задаче Коши (задаче с начальными условиями) A) с
разумным значением h.
2.5. Более подробный анализ метода Эйлера 189
2. Повторить вычисления для /i/2, /i/4 и т. д, т. е. при каждом повторении метода Эйлера
делить на два величину шага.
3. Продолжить таким образом до тех пор, пока результаты, полученные при
очередном повторении, не совпадут с полученными на предыдущей итерации с точностью
до заданного количества значащих разрядов. В этом случае полагают, что
приближенные значения, полученные на данной итерации, вероятно, точны до указанного
количества значащих разрядов.
Пример 1
Применяя эту процедуру к задаче Коши (задаче с начальными условиями)
2ху
Решение
dx
0@) = 1,
C)
1 + я2'
найдем приближение к точному значению у A) решения в точке х = 1.
Используя программу для метода Эйлера, возможно, одну из
приведенных на рис. 2.4.7 и 2.4.8, мы начинаем с величины шага h — 0,04, так
что требуется п = 25 шагов, чтобы достичь точки х = 1. В таблице
на рис. 2.5.1 приведены приближенные значения г/A), полученные для
меньших значений h. Полученные данные подсказывают, что истинное
значение у A) в точности равно 0,5. Действительно, точное решение
задачи Коши (задачи с начальными условиями) C) представляет собой
функцию у(х) = 1/A + ж2), так что истинное значение уA) действительно
в точности равно \. ■
Приближение у A)
значение
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
0,50000
■*(*>
|Ошибка|//1
0,11
0,11
0,11
0,11
0,11
0,10
0,11
0,10
0,04
0,02
0,01
0,005
0,0025
0,00125
0,000625
0,0003125
Рис. 2.5.1. Та(
0,50451
0,50220
0,50109
0,50054
0,50027
0,50013
0,50007
0,50003
5лица значен!
В заключительном столбце таблицы на рис. 2.5.1 приведено отношение величины ошибки
к h, т. е. |уфакт — 2/прибл|/^« Понаблюдайте, как данные в этом столбце подтверждают
теорему 1 — в данном случае оценка ошибки, даваемая равенством B), кажется, выполняется при
значении С, немного большем, чем 0,1.
190 Глава*2. Магматические модели и численные методы
Уточнение метода Эйлера
Как показано на pric. 2.5.2, метод Эйлера довольно асимметричен. Он использует
предсказанный наклон Ш1— f(xn у Уп) графикарешения в левой конечной точке интервала [хп, хп + h]
так, как будто это фактический наклон решения во всем интервале. Мы теперь обращаем
наше внимание на несложный способ увеличения точности; этот способ называется
усовершенствованным яШтодом Эйкера, или уточнением метода Эйлера.
Решая задачу Коши (задЙу с начальными условиями)
dx
/(ж, у), у(хо)=уо,
D)
обычно предполагают, что после выполнения п шагов с величиной шага h мы вычислили
аппроксимацию уп к фактическому значению у(хп) решения в точке хп = хо -f nh. Мы
можем использовать метод Эйлера, чтобы получить первое приближение, которое мы теперь
обозначаем через un+i (а не через yn+i)> к значению решения в точке xn+i = xn + h. Таким
образом,
> ип+1 = уп + h • f(xn,yn) = yn + h-k1.
Теперь, когда вычислено un+i « y{xn+\)9 мы можем взять
> к2 = f(xn+i,un+i)
в качестве второго значения наклона интегральной кривой у = у(х) в точке х = жп+1.
Конечно, приближенное значение наклона кг = f(xn,yn) в точке х = хп было уже
вычислено. Почему бы не взять среднее этих двух значений наклона, чтобы получить бодее
точную оценку среднего значения наклона интегральной кривой во всем подынтервале
Ос + Л,у(х + Л))
Решение / /Предска-
у = у(х)
Ошибка
занное
значение у
/Наклон у'(*)
x + h
Рис. 2.5.2. Истинные и предсказанные значения в методе
Эйлера
2.5. Более подробный анализ метода Эйлера
4т
Наклон fc2 =/(*л + ь ип + \)
Точка, вычисленная по
методу Эйлера (хп + j, ип + А
Наклон^ =f(xn,yn)
1,
Наклон (к\ +к2)
Точка, вычисленная по
усовершенствованному
методу Эйлера (хп + ь уп + х)
хп+1
хп + 2
Рис. 2.5.3. Усовершенствованный метод Эйлера: среднее значений наклона
касательных в точках (хп, уп) и (хп+\, un+i)
[жп, £n+i]? Эта идея и лежит в основе усовершенствованного метода Эйлера. На рис. 2.5.3
этот метод проиллюстрирован геометрически.
АЛГОРИТМ
Усовеш
Решая задачу Коши (задачу с начальными условиями)
^- = /0&,у), y(x0) = уо,
усовершенствованным методом Эйлера при заданной величине шага /г, применяем
итеративные формулы
*1 == J\xm Уп)ч
^гг+1 = Уп + h" fci,
&2 = /(#n+b^n+l),
Уп+1 =Уп + Л' |(*1 + *fe)
E)
для вычисления последовательности приближений уь 2/2 > Уз> • • • к [истинным]
значениям 2/(#i), у(х2), у(хз), • • • [точного] решения у = у(х) в точках a?i, Ж2, #з9...
соответственно. А
Замечание. Последняя формула в E) будет выглядеть так:
Уп+i =Уп + Ь"к,
/192 jSwea 2^are^m\A4eq0k модри и численные методы
: т* е. бу0гг имст£Hг же bijp^to и формула в (обычном) методе Эйлера, если взять
к = ~~^~ ■:
в качестве приблизительного значения Среднего наклона на интервале [хп, xn+i]. ■
Усовершенствоватаый метод Эйлера относится к классу числовых методов,
называемых методами предиктор-корректор2. Сначала вычисляется предсказание (прогноз) wn+i
следующего значения у; затем оно используется для того, чтобы поправить его же. Таким
образом, усовершенствованный метод Эйлера при заданной величине шага h состоит
в итеративном использовании предсказания
> ип+1 = Уп + h • /(жп, уп) F)
и поправки
> Уп+i =Vn + h'\ [f(xn, Уп) + /(жп+1, ип+1)] G)
для вычисления последовательности приближений yi, y2, уг, • • • к значениям y(#i), y(^2),
у (жз),... фактического решения задачи Коши (задачи с начальными условиями) D).
Замечание. Каждый шаг усовершенствованного метода Эйлера требует вычисления
двух значений функции / (х, у), а не одного значения функции, как требуется для шага
обыкновенного метода Эйлера. Естественно задать вопрос: оправдывает ли себя эта удвоенная
вычислительная работа?
Ответ. Если точное решение у = у(х) задачи Коши (задачи с начальными
условиями) D) имеет непрерывную третью производную, то ошибка в усовершенствованном методе
Эйлера имеет порядок h2. Доказательство этого утверждения имеется в главе 7 монографии
Г. Биркгофа и Г. Рота, посвященной дифференциальным уравнениям'. Это означает, что на
данном ограниченном интервале [а, Ь] каждое приближенное значение уп удовлетворяет
неравенству
> \v(xn)-yn\UCh2, (8)
где константа С не зависит от.Л. Поскольку h2 намного меньше, чем /i, если само h мало, это
означает, что усовершенствованный метод Эйлера более точен, чем (простой) метод Эйлера.
Это преимущество несколько омрачается тем, что требуется вдвое больше вычислений.
Но множитель h2 в (8) означает, что деля на два величину шага, мы в 4 раза уменьшаем
максимальную ошибку, а при величине шага /i/Ю мы повышаем точность в 100 раз, т. е.
максимальная ошибка при величине шага составляет 1/100 максимальной ошибки при
величине шага h. Ш
2 Эти методы также называются предсказывающе-исправляющими методами, методами прогноза и
коррекции и методами предсказаний и поправок. В таких методах обычно пользуются каким-нибудь методом
с начальным условием, вычисленным по любой экстраполяционной формуле. Метод экстраполяции, т. е.
метод получения предсказания (прогноза), при этом называют предиктором. Получив предсказание (прогноз),
с помощью другого (возмозможно, неявного) метода, уточняют (корректируют, поправляют) этот прогноз.
Второй медод, используемый для уточнения предсказания, т. е. метод коррекции (поправки) как раз и называется
корректором. — Примеч. ред.
2.5. Более подробный анализ метода Эйлера 193
Пример 2
На рис. 2.4.8 показан результат применения метода Эйлера к задаче Коши
(задаче с начальными условиями)
dy
2/@) = 1,
(9)
имеющей точное решение у{х) = 2ех — х — 1. При f(x,y) = х 4- у
в равенствах F) и G) формулы предсказания и поправки для
усовершенствованного метода Эйлера имеют вид
Un+1 = Уп + h • (хп + Уп),
Уп+i =yn + h-\ [(хп + уп) 4- (хп+1 4- un+i)].
Используя величину шага h = 0,1, мы вычисляем
щ = 1 + @,1).@ + Г) = 1,1,
У1 = 1 + @,05) • [@ + 1) + @,1 + 1,1)] = 1,11,
и2 = 1,11 4- @,1) • @,1 + 1,11) = 1,231,
У2 = 1,11 + @,05) • [@,1 + 1,11) 4- @,2 4 1,231)] = 1,24205,
и т. д. В таблице на рис. 2.5.4 результаты, полученные с помощью
усовершенствованного метода Эйлера, сравниваются с результатами,
полученными ранее с помощью "неусовершенствованного" метода Эйлера. Когда
используется та же самая величина шага h = 0,1, ошибка в
аппроксимации уA) по Эйлеру составляет 7,25%, а ошибка в усовершенствованном
методе составляет только 0,24%.
Действительно, усовершенствованный метод Эйлера при h = 0,1
более точен (в этом примере), чем первоначальный метод Эйлера при
ОД
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
Метод Эйлера,
** = 0Д
* значения у
1,1000
1,2200
1,3620
1,5282
1,7210
1,9431
2,1974
2,4872
2,8159
3,1875
Метод Эйлера,
н^щтв
значения у
1,1098
1,2416
1,3977
1,5807
1,7933
2,0388
2,3205
2,6422
3,0082
3,4230
Усовершенствованный
метод Эйлера, Ь>
значения у
1,1100
1,2421
1,3985
1,5818
1,7949
2,0409
2,3231
2,6456
3,0124
3,4282
:ОД
Точное
значение?/
1,1103
1,2428
1,3997
1,5836
1,7974
2,0442
2,3275
2,6511
3,0192
3,4366
Рис. 2.5.4. Аппроксимации решения задачи dy/dx = х 4- г/, у @) = 1 по методу Эйлера
и усовершенствованному методу Эйлера
194 Глава 2. Математические модели и численные методы
h = 0,005. Последний требует 200 вычислений функции J(x,y), а
усовершенствованный —тольщ20 таких вычислений, так что в данном
случае усовершенствованный метод Эйлера приводит к большей точности,
хотя объем вычислений составляет приблизительно только одну десятую
часть.
«^
X
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
^щ^;
;., ^ЩЩ^ШЛЩЩ :■•/,;,-
.1-^.^<*<Щ1ШЛ1Ц- .;;..;.-
'■ ■/■v-.i^'r:/.* • • ?,.,\
1,00000
1,11034
1,24280
1,39971
1,58364
1,79744
2,04423
2,32749
2,65107
3,01919
3,43654
■•ty:\W- .
^;nUJS^4»m
значение
i?-;tf;i»r {'-У
1,00000 .
1,11034
1,24281
1,39972
1,58365
1,79744
2,04424
2,32751
2,65108
3,01921
3,43656
Рис. 2.5.5. Аппроксимация решения
уравнения (9) при величине шага h = 0,005 с
помощью усовершенствованного метода Эйлера
На рис. 2.5.5 показаны полученные результаты для того случая, когда
усовершенствованный метод Эйлера применен к задаче Коши (задаче
с начальными условиями) (9) при величине шага ft = 0,005. Точность
пяти значащих цифр очевидна из таблицы. Это показывает, что, в отличие
от первоначального метода Эйлера, усовершенствованный метод Эйлера
достаточно точен для некоторых практических приложений, таких как
построение интегральных кривых. ■
Программа для усовершенствованного метода Эйлера (подобная приведенным в
материале для проектов из этого раздела) использовалась для вычисления аппроксимации к
точному значению уA) = 0,5 решения у(х) = 1/A + х2) задачи Коши (задачи с начальными
условиями)
из примера 1. Результаты, полученные последовательным делением величины шага на два,
приведены в таблице на рис. 2.5.6. Обратите внимание, что заключительный столбец этой
таблицы выразительно подтверждает оценку ошибки (8): каждое деление величины шага
на два уменьшает ошибку почти точно в 4 раза, как и должно случиться, если ошибка
пропорциональна h2.
2.5, Более подробный анализ метода Эйлера 195
&иа*5
Ошибка
| Ошибка|//г2
,. , ., 1 г, |,,м,1п,- ,'A, t„n.„ „...,,
0,04
0,02
0,01
0,005
0,0025
0,00125
0,000625
0,0003125
0,500195903
0,500049494
0,500012437
0,500003117
0,500000780
0,500000195
0,500000049
0,500000012
-0,000195903
-0,000049494
-0,000012437
-0,000003117
-0,000000780
-0,000000195
-0,000000049
-0,000000012
0,12
Р,12
0,12
0,12
0,12
0,12
0,12
0,12
Рис. 2.5.6. Аппроксимация у A) по усовершенствованному методу Эйлера
для задачи dy/dx = —2ху/A + х2), у@) = 1
В следующих двух примерах приводятся графические результаты, полученные с
помощью стратегии последовательного деления величины шага на два, и таким образом,
удвоения числа подынтервалов того фиксированного интервала, на котором ищется приближение
к решению.
Пример 3
В примере 3 из раздела 2,4 мы применяли метод Эйлера к логистическому
уравнению в задаче Коши (задаче с начальными условиями)
§ = Ы8-У), У@) = 1-
Нарис. 2.4.9показанаочевиднаяразницамеждуточнымрешениему (х) —
= 8/A + 7е~8ж/3) и аппроксимацией Эйлера на интервале 0 ^ х ^ 5
для п = 20 подынтервалов. На рис. 2.5.7 показаны приблизительные
интегральные кривые, причем график начерчен с использованием
усовершенствованного метода Эйлера.
Аппроксимация для пяти подынтервалов все еще плоха, —
вероятно, она самая худшая! Оказывается, она срезает фактическую граничную
численность популяции М = 8. Вы должны выполнить по крайней мере
первые два шага усовершенствованного метода Эйлера вручную, чтобы
лично увидеть, как случается так, что после правильного увеличения на
первом шаге приближенное решение .убывает на втором шаге вместо
того, чтобы продолжить возрастать (как оно должно). В проекте для этого
раздела мы просим вас показать опытным путем, что приближенное
решение, полученное по усовершенствованному методу Эйлера при величине
шага h = 1 выпрямляется на уровне у « 4,3542.
Напротив, приблизительная интегральная кривая при п = 20
подынтервалах ближе приближается к точной интегральной кривой, и при
п = 40 подынтервалах точная и приблизительная интегральные кривые
неразличимы на рис. 2.5.7. Таблица на рис. 2.5.8 указывает, что аппрок-
196 Глава 2. Математические модели и численные методы
Рис. 2.5.7. Приближение к
решению логистического
уравнения с помощью
усовершенствованного метода Эйлера для п = 5,
п = 10, п = 20 и п = 40
подынтервалов
'а? ■
0
1
2
3
4
5
у- ■- ;\ -'--' . : -
Точное
значение у(х)
1,0000
5,3822
7,7385
7,9813
7,9987
7,9999
Усовершенствованный
метод Эйлера
при п = 200
1,0000
5,3809
7,7379
7,9812
7,9987
7,9999
Рис. 2.5.8. Использование
усовершенствованного метода Эйлера для нахождения приближения
к фактическому решению задачи Коши (задачи
с начальными условиями) в примере 3
симация по усовершенствованному методу Эйлера при п = 200
подынтервалах точна при округлении к трем десятичным знакам (т. е. точны
четыре значащих разряда) на интервале 0 ^ х ^ 5. Поскольку
несоответствия в четвертом значащем разряде визуально не видны при разрешении
обыкновенного компьютерного монитора, усовершенствованный метод
Эйлера (для нескольких сотен подынтервалов) считают вполне
подходящим для многих графических целей. ■
Пример 4
В примере 4 из раздела 2.4 мы применяли метод Эйлера к задаче Коши
(задаче с начальными условиями)
dx
ycosx, у@) = 1.
На рис. 2.4.10 показаны очевидные визуальные отличия между
периодическим точным решением у(х) = е8тх и аппроксимацией Эйлера на
интервале 0 ^ х ^ 67Г для п — 400 подынтервалов.
На рис. 2.5.9 вычерчены точная интегральная кривая и
приблизительные интегральные кривые, полученные с помощью
усовершенствованного метода Эйлера для п = 50, п = 100 ип = 200 подынтервалов.
Аппроксимация, полученная для п = 200, неотличима от точной
интегральной кривой, а аппроксимация при п = 100 только едва отличима
от нее. ■
Хотя рис. 2.5.7 и 2.5.9 показывают, что усовершенствованный метод Эйлера может
обеспечить точность, которая вполне удовлетворительна для многих графических целей, он не
обеспечивает более высокую точность чисел, которая иногда необходима для более
тщательных исследований. Например, снова рассмотрим задачу Коши (задачу с начальными
2.5. Более подробный анализ метода Эйлера 197
Точное решение п = 50
' : = 200и=100 .
О
10
х
15
Рис. 2.5.9. Приближение точного решения у = esinx
с помощью усовершенствованного метода Эйлера при
п = 50,100 и 200 подынтервалах
условиями)
dx
2ху
-У@)
1 + я2'
из примера 1. Заключительный столбец таблицы на рис. 2.5.6 показывает, что если
усовершенствованный метод Эйлера используется на интервале 0 ^ х ^ 1 с п подынтервалами
при величине шага h = 1/п, то окончательная ошибка Е в заключительной аппроксимации
уп « уA) дается формулой
E=\y(l)-yn\*@,l2)h2
0,12
Если это так, то для достижения точности в 12 знаках (например) в значении уA)
потребовалось бы выполнения неравенства @,12)п~~2 < 5 х Ю-13, что означает, что п ^ 489 898.
Таким образом, потребовалось бы выполнить примерно полмиллиона шагов длины
h « 0,000002. Кроме вероятной непрактичности, такое большое количество шагов (для
выполнения которых потребовались бы значительные вычислительные ресурсы), ошибки
округления, неизбежные в такой длинной последовательности шагов, могли бы
значительно превысить накопленнук) (суммарную) ошибку, предсказанную в соответствии с теорией
(в которой принимается, что вычисления точны в каждом отдельном шаге). Следовательно,
для вычислений с такой высокой точностью все же необходимы еще более точные методы,
чем усовершенствованный метод Эйлера. Один из таких методов представлен в разделе 2.6.
2,5, Задачи
Карманный калькулятор вполне подойдет для решения задач 1-10, в которых ставится задача
Коти (задача с начальными условиями) и дается ее точное решение. Применяя усовершенствованный
метод Эйлера, найдите приближение к этому решению на интервале [0,0,5] при величине шага
h = 0,1. Создайте таблицу, в которой приведите значения (с четырьма десятичными знаками)
приближенного решения и фактического решения в точках х = 0,1, 0,2, 0,3, 0,4, 0,5.
1. У' = -У, 2/@) = 2; у(х) = 2е~х
3. у' = у + 1, у@) = 1; у(х) = 2ех
2.у' = 2у9у@) = ±;у(х) = ±е2*
4. у' = х-у, у@) = 1; у{х) = 2е~х + х - 1
198 Глава 2. Математические модели и численные методы
~2
10. у' = 2хгД 2/@) = 1; у(х) =
1 — ;
5. у' = у - ж - 1,2/@) = 1; j/(*) = 2 + ж - ех 6. у' = -2x2/, 2/@) = 2; у (а?) = 2е~
7. г/7 = -Зх2г/, 2/@) = 3; у (ж) == Зе"*3 8. 2/' = е"*, 2/@) = 0; у(я?) = 1п(х + 1)
9. 2/,'=|(l + 2/2),2/@) = l;2/(x) = tgi(x + 7r)
»2 w@) = 1; у(х) = ^~s
Обратите внимание! В приложении после этого набора задач приведены примеры программ для
калькулятора и компьютера, которые могут использоваться в задачах 11-24.
Программируемый калькулятор или компьютер будут полезны длярешения Задач 11-16. В каждой
задаче найдите точное решение данной задачи Коши (задачи с начальными условиями): Затем,
дважды применяя усовершенствованный метод Эйлера, найдите приближение (с пятью десятичными
знаками) этого решения на данном интервале, — сначала при величине шага h = 0,01, а затем
возьмите величину шага h = 0,005. Сделайте таблицу, в которой приведите приближенные
значения и фактическое значение, а также ошибку (в процентах) в более точных аппроксимациях,
для значений х, кратных 0,2. Штрихи везде обозначают производные по х.
11. у' = у - 2,2/@) = 1; 0 ^ х <: 1 12. 2/' = |B/ " l)*> 2/@) =Ъ 0<х < 1
13. 2/2/ = 2х3, г/A) = 3; 1 £ х й 2 14. ху' = 2/2,2/A) = 1; 1 й х й 2
15. аУ = Зх - 22/, г/B) = 3; 2 <; ж ^ 3 16. 2/У = 2х5,2/B) = 3; 2 ^ х < 3
Длярешения задач 17-24 требуется компьютер с принтером. Длярешения этих задач Коши (задач
с начальными условиями) используйте усовершенствованный метод Эйлера с величинами шага h =
= 0,1, 0,02, 0,004 и 0,0008, чтобы найти приближения значений решения с пятью десятичными
знаками в десяти точках, разбивающих данный интервал на равные подынтервалы. Напечатайте
результаты в табличной форме с соответствующими заголовками, чтобы облегчать наблюдение
эффекта изменения величины шага h. Штрихи везде обозначают производные по х.
17. у = х2 + 2/2> 2/@) = 0; 0 ^ х ^ 1 18. у' = ж2 - у2,2/@) = 1; 0 ^ ж й 2
19. у' = х + у/у, 2/@) = 1; 0 й ж ^ 2 20. yf = ж + $/у9 у@) = -1; 0 ^ ж <; 2
21. у' = In 2/, 2/A) = 2; 1 <; ж ^ 2 22. 2/' = ж2/3 + 2/^/3,2/@) = 1; 0 < ж < 2
23. 2/ = sini + cos2/, 2/@) = 0; 0 ^ ж < 1 24. у' = Ж 2, у(-1) = 1; -1 ^ ж < 1
25. Как и в задаче 25 из раздела 2.4, вы прыгаете из вертолета и немедленно открываете ваш
парашют, так что ваша убывающая скорость является решением задачи Коши (задачи с начальными
условиями)
^ = 32 - l,6v, v@) = 0
at
(причем t измеряется в секундах, a v в футах в секунду). Используйте усовершенствованный
метод Эйлера и на программируемом калькуляторе или компьютере найдите приближенное
решение для 0 й t ^ 2, сначала при величине шага h = 0,01, а затем при h = 0,005, округляя
приближенные значения v к трем десятичным знакам. Какой процент от предельной скорости
20 футов в секунду был достигнут через 1 секунду? А через 2 секунды?
26. Как и в задаче 26 из раздела 2.4, предположите, что численность популяции оленей P(t) в
маленьком лесу первоначально составляет 25 особей и удовлетворяет логистическому уравнению
^ = 0,0225Р - 0,0003Р2
at
(причем t выражено в месяцах). Используйте усовершенствованный метод Эйлера и
программируемый калькулятор или компьютер, чтобы найти приближенное решение в течение 10 лет,
сначала с величиной шага h = 1, а затем с h = 0,5, округляя приближенные значения Р к трем
десятичным знакам. Какой процент от граничной численности популяции, равной 75 оленям,
был достигнут через 5 лет? А через 10 лет?
2.5. Более подробный анализ метода Эйлера 199
Используйте усовершенствованный метод Эйлера и компьютерную систему, чтобы найти
искомые значения решения в задачах 27 и 28. Начните с величины шага h = 0,1, а затем используйте
последовательность меньших величин шага, пока последовательные приближенные значения
решения в точке х = 2 не совпадут при округлении до четырех десятичных знаков.
27. у' = х2 + у2 - 1,2/@) = 0; 2/B) = ? 28. у' = х + \у2, г/(-2) = 0; г/B) = ?
29. Пусть стрела выпущена из арбалета, как в примере 2 раздела 2.3, прямо вверх с
поверхности земли с начальной скоростью 49 м/с. Из-за линейного сопротивления воздуха, функция,
выражающая скорость стрелы v(t), является решением задачи Коши (задачи с начальными
условиями)
Hi}
£- = -@,04)г;-9,8, г;@) = 49,
которая имеет точное решение v(t) = 294e~t//25 — 245. Используйте калькулятор или
компьютерную реализацию усовершенствованного метода Эйлера, чтобы приблизить v(t) для
0 ^ t ^ 10 для п = 50 и п = 100 подынтервалов. Отобразите результаты с промежутком в 1
секунду. Совпадают ли эти две аппроксимации после округления к двум десятичным знакам
и с точным решением? Если точное решение неизвестно, объясните, как можно использовать
усовершенствованный метод Эйлера, чтобы найти хорошее приближение для (а) времени
подъема стрелы к верхней точке ее траектории (Данное в разделе 2.3 — 4,56 с) и (Ь) ее прицельной
скорости через 9,41 с полета в воздухе.
30. Рассмотрим теперь стрелу, выпущенную из арбалета, как в примере 3 из раздела 2.3. Она
выстрелена прямо вверх с поверхности земли с начальной скоростью 49 м/с, но из-за того, что
сопротивление воздуха пропорционально квадрату скорости, функция, выражающая скорость
v(t)9 является решением задачи Коши (задачи с начальными условиями)
^ = -@,0011)г;|г;| - 9,8, г;@) = 49.
at
Решение в символическом виде было найдено в разделе 2.3; оно требовало отдельного
исследования подъема стрелы и ее падения, причем v(t) представляла собой функцию тангенс во
время подъема и функцию гиперболический тангенс во время падения. Но
усовершенствованный метод Эйлера не требует такого отдельного разбора случаев. Используйте калькулятор или
компьютерную реализацию усовершенствованного метода Эйлера, чтобы приблизить v{t) для
0 ^ t ^ 10 при п — 100 и при п = 200 подынтервалах. Отобразите результаты с
промежутками в 1 секунду. Совпадают ли эти две аппроксимации после округления к двум десятичным
знакам? Если точное решение неизвестно, объясните, как можно использовать
усовершенствованный метод Эйлера, чтобы найти хорошее приближение для (а) времени подъема стрелы
к верхней точке ее траектории (данное в разделе 2.3 — 4,61 с) и (Ь) ее прицельной скорости
через 9,41 с полета в воздухе.
2.5. Приложение. Реализация
усовершенствованного метода Эйлера
На рис. 2.5.10 приведены программы (для калькулятора TI-85 и на языке BASIC),
реализующие усовершенствованный метод Эйлера нахождения приближенного решения задачи
Коши (задачи с начальными условиями)
t=x+y> y@) = 1'
200 Глава 2. Математические модели и численные методы
рассмотренной в примере 2 из этого раздела. Комментарии, приведенные в заключительном
столбце, должны сделать эти программы понятными, даже если вы совсем мало знакомы
с языками программировании BASIC и TI.
TI-85
НИИ
PROGRAM:IMPEULER
:F=X+Y
:10-*N
:0-*Х
:1->Y
:1->Х1
: (Xl-X) /N^H
:For(I,l/N)
:Y^Y0
:F-*K1
:Y0+H*K1^Y
:X+H^X
:F^K2
:(K1+K2)/2-+K
:Y0+H*K-*Y
:Disp X,Y
:End
Program IMPEULER
DEF FN F(X,Y)
N = 10
X = 0
Y = 1
XI = 1
H = (Xl-X)/N
FOR 1=1 TO N
Y0 = Y
Kl = FNF(X,Y)
Y = Y0 + H*K1
X = X + H
K2 = FNF(X,Y)
К = (Kl + K2)/2
Y = Y0 + H*K
PRINT X,Y
NEXT I
Заголовок программы
X + Y Определение функции f
Количество шагов
Начальное значение х
Начальное значение у
Конечное значение х
Величина шага
Начало цикла
Сохранить предыдущее
значение у
Первый наклон
Предс казание
Новое значение х
Второй наклон
Средний наклон
Поправка
Отобразить результаты
Конец цикла
Рис. 2.5.10. Программы на языках TI-85 и BASIC для реализации
усовершенствованного метода Эйлера
Чтобы применить усовершенствованный метод Эйлера к дифференциальному
уравнению dy/dx = /(х, у), необходимо только изменить начальную строку программы, в которой
определена функция /. Чтобы увеличивать количество шагов (и таким образом, уменьшать
величину шага), необходимо только изменить значение N, указанное во второй строке
программы.
На рис. 2.5.11 показана одна из возможных реализаций усовершенствованного метода
Эйлера на входном языке пакета Matlab. Входными параметрами функции impeuler
являются начальное значение х, начальное значение у, конечное значение xl переменной х
и желаемое количество п подынтервалов. В результате работы этой функции генерируются
векторы-столбцы X и Y значений х и у. Например, команда Matlab
[Xf Y] = impeuler@f 1, 1, 10)
генерирует первый и четвертый столбцы данных, приведенных в таблице на рис. 2.5.4.
Вы должны начать проект по реализации усовершенствованного метода Эйлера для
вашего собственного калькулятора или компьютерной системы. Проверьте вашу программу;
для этого сначала примените ее к задаче Коши (задаче с начальными условиями) из примера 1,
а затем к некоторым другим задачам из этого раздела.
2.5. Более подробный анализ метода Эйлера 201
function ур = f(x,y)
УР :
= x + y;
function [X,Y] = impeuler(x,
h =
X =
Y =
for
(xl - x)/n;
x;
y;
i = l:n; |
kl = f(x,y);
k2 = f(x+h,y+h*kl); N
к = (kl + k2)/2;;
x = x + h;
у = у + h*k;
X = [X;x];
Y = [Y;y];
end
%
УР = У'
y,xl,n)
%
%
%
%
%
%
%
%
%
%
%
%
величина шага
начальное значение
начальное значение
начало цикла
первый наклон
второй наклон
средний наклон
новое значение х
новое значение у
обновить столбец х
обновить столбец у
конец цикла
X
У
Рис. 2.5.11. Реализация усовершенствованного метода Эйлера на Matlab
Новые встречи со знаменитыми числами
В следующих задачах описываются числа е « 2,7182818, In 2 « 0,6931472 и 7г « 3,1415927
как конкретные значения решений некоторых задач Коши (задач с начальными условиями).
В каждом случае примените усовершенствованный метод Эйлера для п = 10, 20, 40,...
подынтервалов (удваивая п каждый раз). Сколько необходимо подынтервалов, чтобы
получить дважды подряд правильное значение числа, округленного к пяти десятичным знакам?
1. Число е = у A), где у (х) — решение задачи Коши (задачи с начальными условиями)
dy/dx = y9y@) = 1.
2. Число1п2 = 2/B),гдеу(ж)— решение задачи Коши (задачи с начальными условиями)
dy/dx = 1/х, уA) = 0.
3. Число 7г = уA), где у(х) —решение задачи Коши (задачи с начальными условиями)
dy/dx = 4/A + х2), у@) =0.
Исследование логистического уравнения роста численности
населения
Примените вашу усовершенствованную программу метода Эйлера к задаче Коши (задаче
с начальными условиями) dy/dx — ^у(8 — у),у@) = 1 из примера X В частности, проверьте
(как утверждается), что приближенное решение при величине шага h = 1 срезается на
уровне у « 4,3542, а не при граничном значении у = в точного решения. Возможно, таблица
значений для 0 ^ х ^ 100 сделает это очевидным.
Проведите собственное исследование численности популяции, удовлетворяющей
логистическому уравнению. Для этого рассмотрите задачу Коши (задачу с начальными
условиями)
dy \ .
- = -у{т-у),. у@) = 1,
202 Глава 2. Математические модели и численные методы
где тип—(например) наибольшая и наименьшая отличные от нуля цифры в номере вашего
студенческого билета. Правда ли, что аппроксимация по усовершенствованному методу
Эйлера при величине шага h = 1 срезается на уровне "правильного" граничного значении
точного решения? Если это не так, найдите меньшее значение h такое, при котором это верно.
Периодический сбор урожая и пополнение запасов
Дифференциальное уравнение
моделирует численность логистической популяции, в которой периодически (период равен
Р) собирается урожай и пополняются запасы, причем максимальная норма сбора и
пополнения запасов равна h. Чтобы начертить типичные интегральные кривые для случая к = М =
= h = Р = 1, использовалась программа численной аппроксимации; интегральные кривые
показаны на рис. 2.5.12. Этот рисунок наводит на мысль (хотя и не доказывает этого строго)
о существовании порогового значения начальной численности популяции такого, что
• если начальная численность популяции выше этого порога, население колеблется
(возможно, с периодом Р) вокруг устойчивой граничной численности популяции у (t) = М,
определенной при условии отсутствия сбора урожая, тогда как
• популяция вымирает, если начальная численность популяции ниже этого порога.
Используйте соответствующую утилиту для построения графиков, чтобы исследовать ваше
собственное логистическое уравнение для численности популяции с периодическим сбором
урожая и пополнением запасов (выбирайте типичные значения параметров к, М, h и Р).
Окажутся ли верными сделанные предположения для вашей модели такой популяции?
2,0
1,5
1,0
^0,5
0,0
-0,5
-1,0
0 1 2 3 4 5
t
Рис. 2.5.12. Интегральнее кривые уравнения dy/dt =
= уA — у) — sin27r£
2.6. Метод Рунге-Кутта 203
2.6, Метод Рунге-Кутта
Мы телерь обсудим метод нахождения прибдиженного решения у = у(х) задачи Коши
(задачи с начальными условиями)
dy
fa = ffay), y(x0) = г/о, 7 A)
который является значительно более точным, чем усовершенствованный метод Эйлера,
и более широко используется на практике, чем любой из численных методов, рассмотренных
в разделах 2.4 и 2.5. Он называется методом Рунге-Кутта, в честь немецких математиков,
которые придумали его, — Карла Рунге3 и Вильгельма Кутта4.
Принимая обычную систему обозначений, предположите, что мы вычислили
аппроксимации уи 2/2* Уз, •. •, Рп к фактическим значениям y(xi\ у(х2), у(х3),..., у(хп) и теперь
хотим вычислите 2/n+i ^ у(хп+г). Тогда
rXn+i rXn+h
y(xn+i) - у{хп) = У*(я) dx = у'{х) dx B)
Jxn Jxn
по фундаментальной теореме анализа. Затем правило Симпсона для численного
интегрирования приводит к равенству
\y\xn) + V (хп + тП + tf'frn+i)] • C)
Следовательно, мы хотим определить у^+г так, чтобы
y(*n+i) - y(xn) « -
Уп+1 « 2/п + g
y'(xn) + 2y' f жп + - J + 2у' (хп + 2 ) + у'(х"+^
D)
мы разбили Ay' (хп + \ К) на сумму двух слагаемых, потому что мы намереваемся выразить
приближенное значение наклона у' {хп + |/i) в середине xn + |/i интервала [х
двумя различными способами.
BпpaвoйчacтиD)зaмeняeм[тoчныe]знaчeниянaклoнay,(a:n),2/, {хп + |ft-),2/' (хп + ~/г)
и г/(жп+х) соответственно следующими значениями (его приближенными оценками):
> h = f{xn,yn). Ea)
• Это наклон в точке хп, вычисленный по методу Эйлера.
> k2 = f(xn + \h, yn + ifcfci) Eb)
3 Немецкий физик и математик Карл Давид Тольме Рунге (Carl Davil Tolme Runge) родился 30 августа 1856 года
в Бремене, а умер 3 января 1927 года в Геттингене. — Примеч. ред.
4 Немецкий физик и математик Мартин Вильгельм Кутта (Martin Wilhelm Kutta) родился 3 ноября 1867 года,
а умер 25 декабря 1944 года. В 1901 году развил метод численного решения задачи Коши для системы
обыкновенных дифференциальных уравнений, придуманный Карлом Рунге. — Примеч. ред.
204 Глава 2. Математические модели и численные методы
• Это оценка наклона в середине интервала [хп, xn+i] методом Эйлера. Она используется
для предсказания значения ординаты в середине этого интервала.
> к3 = f(xn + \h, yn + \hk2) Ec)
• Это значение наклона в середине, вычисленное по усовершенствованному методу Эйлера
> к4 = Дхп+1, уп + ^з) Ed)
• Это наклон в хп+ь вычисленный методом Эйлера с использованием исправленного
наклона А& в середине при переходе к хп+\.
Если сделать эти замены в уравнении D), в результате получится итеративная формула
> Уп+1 = Уп + т(*1 + 2^2 + 2к3 + к4). F)
о
Последовательное использование этой формулы для вычисления аппроксимаций у\, у2:,
2/з, •• • и составляет метод Рунге-Кутта. Обратите внимание, что уравнение F) примет
"форму Эйлера"
Уп+i = 2/п +-Л • fe,
если считать
* = t(*i + 2fc2 + 2fc3 + k4) G)
о
приближенным средним наклоном на интервале [xn, xn+i].
Метод Рунге-Кутта является методом четвертого порядка, поскольку может быть
доказано, что накопленная (суммарная) ошибка на ограниченном интервале [а, Ь) с а = хо
имеет порядок /г4. (Таким образом, итерацию в равенстве F) иногда называют методом
Рунге-Кутта четвертого порядка, потому что можно придумать методы Рунге-Кутта
других порядков.) Иными словами,
> \у(хп)-Уп\йСИ\ (8)
где константа С зависит от функции /(ж, у) иинтервала [а, 6], но не зависит от величины шага
h. Следующий пример иллюстрирует эту более высокую точность по сравнению с точностью
наших предыдущих численных методов более низких порядков.
Пример 1
Мы сначала применяем метод Рунге-Кутта к иллюстративной задаче Ко-
ши (задаче с начальными условиями) ,
^=х + у, у(О) = 1, (9)
которая показана на рис. 2.4.8 раздела 2.4, а затем снова рассматривалась
в примере 2 раздела 2.5. Точное решение этой задачи — у(х) = 2ех —
— х — 1. Чтобы доказать наше утверждение, мы используем h — 0,5, —
большую величину шага, чем в любом из предыдущих примеров, так что
для перехода отж = 0кх = 1 понадобятся только два шага.
2.6. Метод Рунге-Кутта 205
В первом шаге мы используем формулы E) и F) для вычисления
fcx =0+1 = 1,
к2 = @ + 0,25) + A + @,25) • A)) = 1,5,
к3 = @ + 0,25) + A + @,25) • A,5)) = 1,625,
к4 = @,5) + A + @,5) • A,625)) = 2,3125
и затем
У1 = 1 + ^[1 + 2 • A,5) + 2 • A,625) + 2,3125] « 1,7969.
Точно так же второй шаг приводит ку2~ 3,4347.
X
0,0
0,5
1,0
Усовершенствованный
метод Эйлера
у при h = ОД Ошибка в %%
1,0000 0,00%
1,7949 0,14%
3,4282 0,24%
Метод Рун1^-Кууг«
упри h «s 0,S Ошибка в *$%
1,0000 0,00%
1,7969 0,03%
3,4347 . ; 0,05%
Точное
значение
V
1,0000
1,7974
3,4366
Рис. 2.6.1. Результаты применения метода Рунге-Кутта и усовершенствованного метода
Эйлера к задаче Коши (задаче с начальными условиями) dy/dx = х + у, у@) = 1
На рис. 2.6.1 эти результаты представлены вместе с результатами
(см. рис. 2.5.4) применения усовершенствованного метода Эйлера при
величине шага h = 0,1. Мы видим, что даже при большей величине шага
метод Рунге-Кутта имеет (для этой задачи) в четыре-пять раз большую
точность (т. е. меньшую относительную ошибку, вычисленную в
процентах), чем усовершенствованный метод Эйлера. ■
Общепринято измерять вычислительную работу, необходимую для нахождения
решения уравнения dy/dx = f(x,y) количеством необходимых вычислений значений функции
f(x, у). В примере 1 метод Рунге-Кутта требовал вычисления восьми значений /(ж, у) =
— х + у (по четыре в каждом шаге), тогда как усовершенствованный метод Эйлера требовал
вычисления 20 таких значений (по два для каждого из 10 шагов). Таким образом, метод
Рунге-Кутта дает в четыре раза большую точность, требуя только 40% вычислений.
Компьютерные программы, реализующие метод Рунге-Кутта, приведены в приложении
к этому разделу. На рис. 2.6.2 приведены результаты, полученные с помощью
усовершенствованного метода Эйлера и метода Рунге-Кутта для задачи dy/dx = х + у,у@) = 1с той
же самой величиной шага h = 0,1. Относительная ошибка в значении, вычисленном по
усовершенствованному методу Эйлера, в точке х = 1 приблизительно равна 0,24%, но для
значения, вычисленного по методу Рунге-Кутта, она равна всего лишь 0,00012%. В этом
сравнении метод Рунге-Кутта приблизительно в 2000 раз более точен, хотя и требует только
вдвое больше вычислений значений функции, чем усовершенствованный метод Эйлера.
Оценка погрешности
\y(xn)-yn\UCh*
(8)
206 Глава 2. Математические модели и численные методы
штттттттщттвтттттттттттятттштттттштттщт^ттттщтт
х Усовершенствованный метод Эйлера, у Метод Рунге-Кутта, у Точное у
0,1 1,1100
0,2 1,2421
0,3 1,3985
0,4 1,5818
0,5 1,7949
0,6 2,0409
0,7 2,3231
0,8 2,6456
0,9 3,0124
1,0 3,4282
1,110342
1,242805
1,399717
1,583648
1,797441
2,044236
2,327503
2,651079
3,019203
3,436559
1,110342
1,242806
1,399718
1,583649
1,797443
2,044238
2,327505
2,651082
3,019206
3,436564
Рис. 2.6.2. Результаты, полученные методом Рунге-Кутта и усовершенствованным
методом Эйлера, для задачи Коши (задачи с начальными условиями) dy/dx = х + у, у @) = 1
с одной и той же величиной шага h = 0,1
для метода Рунге-Кутта показывает, что величина ошибок быстро уменьшается при
уменьшении величины шага h. (Впрочем, при очень маленькой величине шага могут недопустимо
возрасти ошибки округления.) Из неравенства (8) следует, что (на фиксированном
ограниченном интервале) деление величины шага на два уменьшает абсолютную ошибку в 16
раз. Следовательно, обычно применяемый на практике метод последовательного деления
величины шага на два "стабилизирует" результаты вычислений особенно эффективно, если
применяется вместе с методом Рунге-Кутта.
Пример 2
В примере 5 из раздела 2.4 мы видели, что метод Эйлера не позволяет
найти приближенное решение у(х) задачи Коши (задачи с начальными
условиями)
% = х2 + У2, 3/@) = 1, A0)
если х приближается к точке, в которой решение терпит бесконечный
разрыв, —это происходит в окрестности точки х = 0,969811 (см. рис. 2.6.3).
Теперь мы применим метод Рунге-Кутта к этой задаче Коши (задаче с
начальными условиями).
На рис. 2.6.4 показаны результаты применения метода Рунге-Кутта
на интервале [0,0, 0,9], причем вычисления выполнялись при величине
шага h = 0,1, h = 0,05 и h = 0,025. Конечно, есть все же некоторое
затруднение в окрестности х = 0,9, но из полученных данных вполне
можно заключить, что у @,5) « 2,0670.
Поэтому мы снова применим метод Рунге-Кутта к задаче Коши
(задаче с начальными условиями)
^|=*2 + у2, 2/@,5) = 2,0670. A1)
2.6. Метод Рунге-Кутта 207
Рис. 2.6.3. Решения уравнения dy/dx =
■h^'Xf"-
0,1
0,3
0,5
0,7
0,9
1,Ш5
1,4397
2,0670
3,6522
14,0218
ЩЩтШът:
1,1115
1,4397
2,0670
3,6529
14,2712
IIIIPI0I 111I1 ПИН III. I \t 11,11111 II
1,1115
1,4397
2,0670
3,6529
14,3021
Рис. 2.6.4. Приближение решения задачи Коши (задачи с начальными
условиями) A0)
На рис. 2.6.5 приведены результаты вычислений на интервале [0,5,0,9],
полученные при величине шага h = 0,01, h — 0,005 и h = 0,0025. Теперь
можно заключить, что 2/@,9) « 14,3049.
к, v
у при/i = 0,01
= 0,005;
|/ при h » 0,0025
0,5
0,6
0,7
0,8
0,9
2,0670
2,6440
3,6529
5,8486
14,3048
?,0670
2,6440
3,6529
5,8486
14,3049
2,0670
2,6440
3,6529
5,8486
14,3049
Рис. 2.6.5. Приближение решения задачи Коши (задачи с начальными
условиями) A1)
Наконец, результаты вычислений, приведенные на рис. 2.6.6,
представляют собой решение для задачи Коши (задачи с начальными условиями)
£=*2+2/2, 2/@,9) = 14,3049,
A2)
208 Глава 2. Математические модели и численные методы
X
у при & =г 0,002
ynpnh as 0,001
у при/i — 0,0005
0,90
0,91
0,92
0,93
0,94
0,95
14,3049
16,7024
20,0617
25,1073
33,5363
50,4722
14,3049
16,7024
20,0617
25,1073
33,5363
50,4723
14,3049
16,7024
20,0617
25,1073
33,5363
50,4723
Рис. 2.6.6. Приближенное решение задачи Коши (задачи с начальными
условиями) A2)
на интервале [0,90,0,95]. Они получены при величине шага h = 0,002,
h = 0,001 и h = 0,0005. Наш заключительный приближенный результат
представляет собой значение у @,95)« 50,4723. Точное значение решения
в точке х = 0,95 равно у@,95) «50,471867. Наш результат чуть больше—
главным образом потому, что начальное значение с четырьмя знаками
в A2) является (в действительности) результатом округления в большую
сторону фактического значения у@,9) « 14,304864; такие ошибки
значительно увеличиваются при приближении к вертикальной асимптоте.И
Пример 3
Парашютист массой 60 кг спрыгивает с вертолета, зависшего на
начальной высоте 5 км. Предположим, что парашютист начинает падать
вертикально с начальной скоростью, равной нулю. На парашютиста действует
направленная вверх сила Fr сопротивления воздуха, зависящая от
скорости v (в метрах в секунду). Эта зависимость силы сопротивления воздуха
от скорости v дается формулой
FR = @,0096)A00v + Ю^2 + vs)
(в ньютонах, причем координатная ось направлена вниз, чтобы v > 0 при
спуске на землю). Если парашютист не откроет парашют, какова будет его
предельная скорость? Как быстро он будет падать через 5 с после начала
прыжка? А через 10 с? А через 20 с?
Решение Закон Ньютона F = та дает уравнение
dv
т
dt
тд - FR,
т.е.
^dv
60^ = F0)(9,8) - @,0096)A00v + 10v2 + v3),
dt
A3)
потому что т = 60 и д = 9,8. Таким образом, функция, выражающая
скорость v(t), является решением задачи Коши (задачи с начальными
2.6. Метод Рунге-Кутта 209
условиями)
где
dv
It
= /(v), t/@)=0,
f(v) = 9,8 - @,00016)A00v + Юг;2 + vd).
A4)
A5)
Парашютист достигает своей предельной скорости, когда сила
тяжести уравновесит сопротивление воздуха, так что f(v) = 0. Поэтому
предельную скорость можно вычислить немедленно, решая уравнение
f(v) = 9,8 - @,00016)A00г; + 10v2 + v3) = 0.
A6)
На рис. 2.6.7 показан график функции f(v) и выделен единственный
вещественный корень v « 35,5780 (его можно найти графически, или с
помощью калькулятора, или же с помощью компьютерной процедуры Solve).
Таким образом, предельная скорость парашютиста приблизительно
равна 35,578 м/с, что составляет приблизительно 128 км/час (почти 80 миль
в час).
На рис. 2.6.8 показаны результаты нахождения приближенного
решения задачи Коши (задачи с начальными условиями) A4) методом Рунге-
Кутта; при величине шага h = 0,2 и h = 0,1 получаются те же самые
результаты (с точностью до трех десятичных знаков). Заметьте, что
предельная скорость фактически достигается уже через 15 с. Но скорость
парашютиста равна 91,85% его предельной скорости уже после всего
лишь 5 с, а 99,78% — после всего лишь 10 с. ■
60
20 Ь'
5 оь-
-20 h
-40 h
-60.
_l_
iv
_L_
_l_i_L_
60-40-20 0 20 40 60 80 100
v
Рис. 2.6.7. График функции
f(v) = 9,8 - @,00016) A00^4-
+ 10v2 + v3)
t(t) t?(m/c)
*■($) v(m/c)
0
1
2
3
4
5
6
7
8
9
10
0
9,636
18,386
25,299
29,949
32,678
34,137
34,875
35,239
35,415
35,500
11
12
13
14
15
16
17
18
19
20
35,541
35,560
35,569
35,574
35,576
35,577
35,578
35,578
35,578
35,578
Рис. 2.6.8. Скорость парашютиста
210
Глара 2; Математические модели и численные методы
Заключительный пример этого раздела сод&ржт предупреждение: для некоторых типов
задач Коши (задач с начальными условиями), численные методы, которые мы обсудили,
далеко не столь успешны, как в предыдущих примерах.
Пример 4
Рассмотрим с виду безобидную задачу Коши (задачу с начальными
условиями)
dx
= 52/-6e-V 2/@) = 1,
A7)
точное решение которой тгредставляет собой функцию у(х) = е~х. В
таблице на рис. 2.6.9 приведены результаты, полученные методом Рунге-
Кутта на интервале [О,4] при величине шага/г => 0,2, h = 0,1 и h = 0,05.
Очевидно, эти попытки решить Данную задачу йа практике оказались
неудачными. Хотя у (х) = е~х —► Оприх —► 4-оо, кажется, что наши
приближенные числовые значения стремятся к —оо, а не к нулю.
: „1:!1Ц|Д1Д1м;|р
'"•Л Ы
*; л i л *V У-- > V'* ,>л
«Willi wiiiimiHW i III. Ill Mi.l'lll tlllillHWHnililiiilninV ИЩ1 'щ iHl|llll.lil|J|lllli.,W»i.;i.l.i..,t I Mli.il МШИ. I'lilillilWH iHim iilinii.nlini'iiHh'l Hil. ,.,..,. П.К.1.И1Г «Hi
0,4
0,8
1,2
1,6
2,0
2,4
2,8
3,2
3,6
4,0
0,66880
0,43713
0,21099
-0,46019
-4,72142
-35,53415v
-261,25023
-1916,69395
-14059,35494
-103126,5270
0,67020
0,44833
0,29376
0,14697
-0,27026
-2,90419
-22,05352
-163,25077
-1205,71249
-8903,12866
0,67031
0,44926
0,30067
0,19802
0,10668
-0,12102
-1,50367
-11,51868
-85,38156
-631,03934
0,67032
0,4^933
O-310199
0,20190
0,13534
0,09072
0,06081 ,
0,04076
0,02732
0,01832
Рис. 2.6.9. Попытки решить в числовой форме задачу Коши (задача с
начальными условиями) A7) методом Рунге-Кутта
Объяснение состоит в том, что общее решение уравнения dy/dx =
= Ъу — 6е~х представляет собой функцию
у(х) = е~х+Сё
,5х
A8)
Частное решение задачи A7), удовлетворяющее начальному условию
у@) = 1, получается при С = 0. Но любое отклонение, пусть самое
маленькое, от точного решения у(х) = е~х — даже из-за ошибки
округления —вносит ошибку, благодаря которой в действительности значение
константы С в уравнении A8) вроде бы становится отличным от нуля.
И как доказано» на рис. 2.6.10, все интегральные кривые вида A8) при
С^0 быстро расходятся далеко от решения, получаемого три С = 0,
даже если их начальные значения близки к 1. ■
2.6. Метод Рунге-Кутта 21 f
Рис. 2.6.10. Поле направлений и
интегральные кривые уравнения dy/dx^ by — 6е~ж
Трудности такого сорта, проиллюстрированные примером 4, иногда неизбежны, но
можно по крайней мере надеяться распознать такую задачу. Приближенные значения, порядок
величины которых изменяется с изменяющимся величины шага,—вот наиболее общий
индикатор такой неустойчивости. Эти трудности обсуждаются в учебниках численного анализа
и являются темой текущего "полевого" исследования в данном разделе.
2.6» Задачи _____.^ ____^
Карманный калькулятор вполне подойдет для решения задач 1-10, в которых ставится задача
Коши (задача с начальными условиями) и дается ее точное решение. Примените метод Рунге-
Кутта, чтобы найти приближение к этому решению на интервале [0,0,5] при величине шага
h = 0,25. Создайте таблицу, в которой приведите значения приближенного решения с пятью
десятичными знаками и значения фактического решения в точках х = 0,25 и 0,5.
1. У' = -У, 2/@) = 2; у(х) = 2е~* 2. у' = 2у, у@) = ±; у(*)> ±е2*
3. у' = у +1, у@) = 1; у(х) = 2ех - 1 4. у' = х - у, у@) = 1; у(х) = 2е~х + х - 1
5. у' = у - х - 1,2/@) = 1; у(х) = 2 + х-ех 6. у' = -2ху9 у@) = 2; у(х) = 2е~*2'
7. у' = -Зя2у, 2/@) = 3; у(х) = Зе"*3 8. у' = е^, у@) = 0; у(х) = ln(s 4-1)
9. У' = ±A + у2), 2/@) = 1; у(х) = tg |(я + тг)
10. у1 = 2ху\ у@) = 1; у(х) = j±^
Обратите внимание. В приложении после этого набора задач приведены программы для
калькулятора и компьютера, которые могут использоваться в остальных задачах.
Программируемый калькулятор или компьютер будут полезны для решения задач 11-16. В каждой
задаче найдите точное решение данной задачи Коши (задачи с начальными условиями). Затем,
дважды применяя метод Рунге-Кутта, найдите приближение этого решения на данном
интервале (с точностью до пяти десятичных знаков), — сначала при величине шага h = 0,2, а затем при
величине шага h = 0,1. Сделайте таблицу, в которой приведите приближенные значения и
фактические значения, а также ошибку (в процентах) в более точной аппроксимации, для значений х
кратных 0,2. Штрихи везде обозначают производные по х.
11, у' = у - 2, у@) = 1; 0 <: х <: 1 12. у' = §(у - IJ, у@) = 2; 0 ^ х й 1
212 Глава 2. Математические модели и численные методы
у' = 2х39 2/A) = 3; 1 й х й 2 14. ху' = у2, 2/A) = 1; 1 ^ а; ^ 2
2/ = Зх - 2у, уB) = 3; 2 <; х ^ 3 16. у2?/' = 2хъ9 уB) = 3; 2 ^ а: ^
Компьютер с принтером потребуется для решения задач 17-24. Для решения этих задач Коши
(задач с начальными условиями) используйте метод Рунге-Кутта с величиной шага h = 0,2, 0,1, 0,05
и 0,025. С помощью метода Рунге-Кутта найдите приближение с шестью десятичными знаками
для значений решения в пяти точках, разбивающих данный интервал на равные подынтервалы.
Напечатайте результаты в табличной форме под соответствующими заголовками, чтобы было
легче увидеть эффект изменения величины шага h. Штрихи везде обозначают производные по х.
17. у' = х2 + у2,2/@) = 0; 0 й х <, 1 18. у' = х2 - у2, у@) = Г, 0 й х ^ 2
19. у' = х + у/у, 2/@) = 1; 0 <; х <> 2 20. у' = х + ^/, 2/@) = -1;0^ж^2
21. у' = In 2/, 2/A) = 2; 1 ^ ж ^ 2 22. у' = х2/3 + у2/3, у@) = 1; 0 й х й 2
23. 2/' = sinx + cos2/, 2/@) = 0; 0 ^ а; ^ 1 24. 2/' = ^ 2,2/(-1) = 1; -1 ^ ж ^ 1
25. Как и в задаче 25 из раздела 2.5, вы выпрыгиваете из вертолета и немедленно открываете
ваш парашют, так что ваша убывающая скорость является решением задачи Коши (задачи
с начальными условиями)
dv
5т = 32 - l,6v, v@) = 0
at
(где t измеряется в секундах, a v — в футах в секунду). Используйте метод Рунге-Кутта и
программируемый калькулятор или компьютер, чтобы найти приближенное решение для 0 ^ t ^ 2,
сначала с величиной шага h = 0,1, а затем с величиной шага /i = 0,05, округляя
приближенные значения v к трем десятичным знакам. Какой процент от предельной скорости 20 футов
в секунду будет достигнут через 1 секунду? Через 2 секунды?
26. Как и в задаче 26 из раздела 2.5, предположите, что численность популяции оленей P(t)
в маленьком лесу первоначально равна 25 особям и удовлетворяет логистическому уравнению
^ = 0,0225Р - 0,0003Р2
at
(причем t измеряется в месяцах). Используйте метод Рунге-Кутта и программируемый
калькулятор или компьютер, чтобы найти приближенное решение для. 10 лет, сначала с величиной
шага h = 6, а затем с величиной шага h = 3, округляя приближенные значения Р к четырем
десятичным знакам. Какой процент от граничной численности популяции, равной 75 оленям,
будет достигнут через 5 лет? А через 10 лет?
В задачах 27 и 28 найдите искомые значения решения с помощью метода Рунге-Кутта и
компьютерной системы. Начните при величине шага h = 1, а затем используйте последовательность
меньших величин шага, пока последовательные приближенные значения решения в точке х = 2 не
совпадут при округлении до 5 десятичных знаков.
27. у' = х2 + у2 - 1,2/@) = 0; 2/B) =? 28. у' = х + \у2 9 у{-2) = 0; 2/B) =?
Задачи, связанные со скоростью и ускорением
В задачах 25 и 26 линейное ускорение а = dv/dt двигающейся частицы дает формула dv/dt =
= /(£, v), где скорость v = dy/dt — производная функции у = y(t), задающей положение частицы
в момент времени t Предположим, что приближенное значение скорости v(t) вычисляется
методом Рунге-Кутта. Для этого методом Рунге-Кутта ищется решение задачи Коши (задачи
с начальными условиями)
di)
— =/(t,t>), ti@)=«o. A9)
2.6. Метод Рунге-Кутта 213
Иными словами, применяются формулы в уравнениях E) и F) (причем t и v используются вместо
х и у). Вычислите последовательность приближений значений скорости v\, V2, V3, ..., vm в
последовательные моменты времени ti, £2, £3, • • •, tm (причем tn+i = tn + h). Для этого в качестве
отправной точки ваших вычислений используйте начальные данные to = 0 и vo. Затем
найдите также приближенное значение расстояния y(t), пройденного частицей. Для этого в качестве
отправной точки выберите начальное положение у@) = уо и вычисляйте
Цп+i =уп + Vnh+ \anh2 , и B0)
(п = 1, 2, 3, ...), где ап = f(tn,vn)&bf(tn) — приближенное значение ускорения частицы
в момент времени tn- Формула B0) дает точное приращение (от уп до yn+i), если ускорение
является константой в течение временного интервала [tn, tn+i]- . «
Таким образом, как только рассчитана таблица приблизительных скоростей, уравнение B0)
позволяет просто вычислить таблицу последовательных положений тела. Этот процесс
иллюстрируется в проекте для этого,раздела, причем данные по скорости приведены на рис. 2.6.8
(пример 3), а затем, используя эти данные, можно отслеживать положение парашютиста во
время его спуска на землю.
29. Рассмотрим снова стрелу, выпущенную из арбалета прямо вверх с поверхности земли, как
в примере 2 в разделе 2.3. Начальная скорость стрелы равна 49 м/с. Из-за линейного
сопротивления воздуха функция, выражающая скорость v = dyjdt, является решением задачи Коши
(задачи с начальными условиями)
Hi)
— = -@,04)г, - 9,8, v@) = 49,
которая имеет точное решение v(t) = 294e_t/^25 — 245. (а) Примените калькулятор или
программу, реализующую метод Рунге-Кутта на компьютере, чтобы найти приближенные значения
v(t) для 0 й t й 10, разбив этот отрезок на п — 100 и п = 200 подынтервалов. Отобразите
результаты с промежутками в 1 секунду. Совпадут ли эти две аппроксимации после округления
до четырех десятичных знаков между собой и с точным решением? (Ь) Теперь используйте
данные по скорости, полученные в части (а), чтобы найти приближенные значения y(t) для
0 й t й 10, разбив отрезок на п = 200 подынтервалов. Отобразите результаты с
промежутками в 1 секунду. Совпадут ли приближенные значения положения после округления к двум
десятичным знакам с точным решением
y(t) = 7350 (l - e~t/25) - 245t?
(с) Если бы точное решение было неизвестно, объясните, как вы могли бы использовать метод
Рунге-Кутта, чтобы найти достаточно хорошее приближение для времени подъема и спуска
стрелы, а также максимальной высоты, которой она достигает.
30. Теперь снова рассмотрите стрелу, выпущенную из арбалета, как в примере 3 в разделе 2.3. Она
выстрелена прямо вверх с поверхности земли с начальной скоростью 49 м/с, но сопротивление
воздуха пропорционально квадрату скорости стрелы, так что функция, выражающая скорость
v(t), является решением задачи Коши (задачи с начальными условиями)
dij
— = -@,0011)ф| - 9,8, v(Q) = 49.
Приступая к решению этой задачи Коши (задачи с начальными условиями), повторите
вычисления, проведенные в частях (а)-(с) задачи 25 (за исключением того, что, возможно, придется
взять п = 200 подынтервалов, чтобы получить точность до четырех знаков в части (а) и п =
= 400 подынтервалов для точности до двух знаков в части (Ь)). Согласно результатам задач 17
214 Глава 2. Математические модели и численные методы
и 18 из раздела 2.3, ркорость стрелы и функция^ выражающая положение во время подъема
и спуска, выражаются следующими формулами.
Подъем.
v(t) ±= (94;388) tg@,478837 - [0,103827]*),
y(t) = 108,465 + (909,091) In (cos@,478837 - [0,103827]*));
Скижение.
t/(t) = -(94,388) th@,103827[* - 4,6119]),
y(t) = 108,465 - (909,091) In (cosh@,103827{* - 4,6119])).
2.6. Приложение. Реализация метода Рунге-Кутта
На рис. 2.6.11 приведена программа (на входном языке калькулятора TI-85 и на языке
программирования BASIC)^ реализующая метод Рунге-Кутта для нахождения приближенного
решения задачи Коши (задачи, с начальными условиями)
^-=х + у, 2/@) = 1,
рассмотренной в примере 1 этого раздела. Комментарии, приведенные в заключительном
столбце, должны сделать эти программы понятными, даже если вы совсем мало работали
с языками программирования BASIC и TI.
Чтобы применить метод Рунге-Кутта к другим уравнениям вида dy/dx = /(х, у),
необходимо только изменить начальную строку программы, в которой определена функция /.
Чтобы увеличить количество шагов (и, таким образом, уменьшить величину шага),
необходимо только изменить Значеййе N, указанное во второй строке программы.
На рис. 2.6.12 приведена реализация метода Рунге-Кутта на входном языке пакета
Matlab. Предположим, что уже определена функция / из правой части
дифференциального уравнения у' = /(я, у). Тогда функция г к в качестве входного параметра принимает
начальное значение х, начальное значение у, конечное значение xl переменной х и
желаемое количество п подынтервалов. В качестве результата она генерирует векторы-столбцы X
и Y, содержащие значения х и у. Например, команда MATLAS
[X, Y] = гк@, 1, 1, 10)
генерирует первый и третий столбцы данных, показанных в таблице на рис. 2.6.2.
Вы должны начать работу над этим проектом с реализации метода Рунге-Кутта на
вашем собственном калькуляторе или компьютерной системе. Проверьте вашу программу;
применяя ее сначала к задаче Коши (задаче с начальными условиями) из примера 1, а затем
к некоторым другим задачам из этого раздела.
Новая встреча со знаменитыми числами, на этот раз последняя
Следующие задачи описывают числа
е « 2,71828182846, In 2 « 0,69314718056 и тг » 3,14159265359
как конкретные значения величин, являющихся решением некоторых задач Коши (задач с
начальными условиями). В каждом из этих случае примените метод Рунге-Кутга для п = 10,
2.6. Метод Рунге-Кутта
215
Г1Ш-
'£y^i-/f;i;?
AtiiZ:
PROGRAM:RK
:F=X+Y
:10->N
:0—X
:1—Y
:l-OCl
: (Xl-X) /N-+H
:For(Ifl/.N) .
:X-+X0
:Y~>Y0
:F—Kl
:X0+H/2-*X
:Y0+H*Kl/2-*Y
:F->K2
:Y0+H*K2/2-+Y
: F-+K3
:X0+H-+X
:Y0+H*K3->Y
: F-+K4
: (K1+2*K2+2*K3
+K4)/6-+K
:Y0+H*K->Y
:Disp X,Y
:End
Program RK
DEF FN F(X,Y) = X + Y
N = 10
X = 0
Y = 1
XI * 1
H = (Xl-X)/N
FOR 1*1 TO;N
X0 = X
YO = Y
Kl = FNF(X,Y)
X = XO + H/2
Y = YO + H*Kl/2
K2 = FNF(X,Y)
Y = YO + H*K2/2
КЗ = FNF(X,Y)
X = XO + H
Y = YO + H*K3
K4 = FNF(X,Y)
К ~ (K1+2*K2+2,*K3
+K4)/6
Y = YO + K*K
PRINT X,Y
NEXT I
Заголовок программы
Определение функции f
Количество шагов
Начальное значение х
Начальное значение у
Конечное значение х
Величина шага
Начщлд ццкла
Сохранить предыдущее
значение х
Сохранить предыдущее
значение у
Первый наклон
Середина
Предсказание в середине
Второй наклон
Предсказание в середине
Третий наклон
Новое значение
Предсказание в
Четвертый наклон
Средний наклон
Поправка
Отображение результатов
на дисплее
Конец цикла
х
конце
Рис. 2.6.11. Программа Рунге-Кутта на входных языках TI-85 и BASIC
20,40,... подынтервалов (удваивая п каждый раз). Сколько подынтервалов необходимо для
того, чтобы получить дважды подряд правильное значение вычисляемого числа,
округленного к девяти десятичным знакам?
1. Число е = 2/A), где у(х) — решение задачи Коши (задачи с начальными условиями)
dy/dx = t/, 2/@) = 1.
2. Число In 2 = уB),гдеу(х)—решениезадачиКоши(задачисначальнымиусловиями)
dy/dx = 1/х, 2/A) = 0.
3. Число 7г = уA), где у(х) —решение задачи Коши (задачис начальными условиями)
dy/dx = 4/A + х2), </@) = 0.
216 Глава 2. Математические модели и численные методы
function yp = £'('х,у)
ур = х + y;s % ур = у'
function [X,Y] = rK(x,y,xl,n)
h = (xl^- x)/n; % величина шага
X = x; % начальное значение
x
Y = у; % начальное значение
У
for i = 1:n % начало цикла
kl = f(x,y); % первый наклон
k2 = f(x+h/2,y+h*kl/2); % второй наклон
k3 = f (x+h/2,y+h*k2/2); % третий наклон
k4 = f (x+h, y+h*k3) ; % четвертый наклон
k = (kl+2*k2+2*k3+k4)/6; % средний наклон
x = x + h; % новое значение х
у = у + h*k; % новое значение у
X = [Х;х]; % обновить столбец х
Y = [Y;y]; % обновить столбец у
end % конец цикла
Рис. 2.6.12. Реализация метода Рунге-Кутта на входном языке пакета Matlab
Спуск парашютиста
Следующая функция на входном языке Matlab является описанием функции, дающей
ускорение парашютиста в примере 3.
function vp = f (tfv)
vp = 9,8 - 0,00016*A00*v + 10*vA2 + vA3);
Тогда команды
k=200 %200 подынтервалов -
[tfv] = rk@, 20f 0, k) ; % аппроксимация Рунге-Кутта
[tA:10:k+l); v(l:10:k+l)] % отображать каждое 10-е значение
генерируюттаблицу приближенных скоростей, приведенную на рис. 2.6.8. Наконец, команды
у = zeros(k+1,1): % инициализируем у
h = 0,1; % величина шага
'for n = 1:к % для п = 1 до к
а = f(t(n),v(n)): % ускорение
y(n+l) = y(n) + v(n)*h + 0,5*a*hA2; % Уравнение B0)
end % конец цикла
[t(l:20:k+l),v(l:20:k+l),y(l:20:k+l)] % каждое 20-е значение
выполняют вычисления функции, дающей положение. (Эта функция описана в
уравнении B0) в инструкциях к решению задач 25 и 26.) Результаты этих вычислений приведены
втаблице на рис. 2.6.13. Оказывается, что длина пути парашютиста составляет 629,866 м в те-
2.6. Метод Рунге-Кутта 217
*<с)
0
2
4
6
8
10
12
14
16
18
20
v (м/с)
0
18,386
29,949
34,137
35,239
35,500
35,560
35,574
35,577
35,578
35,578
v(**)
0
18,984
68,825
133,763
203,392
274,192
345,266
416,403
487,555
558,710
629,866
Рис. 2.6.13. Данные по скорости
парашютиста и его положению
чение первых 20 с спуска, а затем он находится в состоянии свободного падения остающиеся
4370,134 метра к земле с предельной скоростью 35,578 м/с. Следовательно, полное время
спуска равно 20 + D370,134/35,578)«142,833 с, или приблизительно 2 минуты 23 секунды.
После реализации рассмотренных методов решите на доступной вам компьютерной
системе собственную задачу парашютиста. В этой задаче масса т парашютиста должна
быть равна вашей массе, а сила сопротивления воздуха должна иметь вид Fr = av + bv2 +
+ cv3 с подходящими значениями констант. Значение высоты может, конечно, отличаться от
использованного выше.
ГГ
\\#-
jJL
.г "'^~^Ш^№
ГЛАВА
Линейные
уравнения
высших порядков
3.1. Введение: линейные уравнения второго
порядка
В главах 1 и 2 рассматривались дифференциальные уравнения первого порядка. Теперь
мы переходим к уравнениям более высокого порядка п ^ 2. Мы начнем с линейных
уравнений. Поскольку многие положения общейтеории линейных дифференциальных
уравнений могут быть продемонстрированы на уравнениях второго порядка (п = 2), в первом
разделе будет рассмотрен случай п = 2, т. е. фактически будет изложена теория уравнений
второго порядка.
Напомним, что дифференциальное уравнение второго порядка относительно
(неизвестной) функции у(х) имеет вид
G(x,y,y',y") = 0. A)
Это дифференциальное уравнение называется линейным, если G — линейная функция по
переменной у и ее производным у' и у ".В частности, линейное уравнение второго порядка
может быть записано в виде
> А(х)у" + В(х)у' + С(х)у = F(x). B)
Мы всегда (если не сказано иное) будем предполагать, что (известные) функции А(х)9 В(х),
С(х) и F(x) непрерывны на некотором открытом (возможно неограниченном) интервале
/ (на котором мы хотим решить уравнение), но мы не будем требовать линейности этих
функций. Поэтому уравнение
еху" + (cosx)y' 4- A 4- у/х )у = tg x
является линейным, так как оно линейно по переменной у и ее производным у' и у". И
наоборот, уравнения
у" = уу' и 2/" + 30/Г+42/;
О
не линейны, так как в них входят произведения и степени у или ее производных.
220 Глава 3. Линейные уравнения высших порядков
Если функция F(x) в правой части уравнения B) тождественно равна 0 на J, то о^но
называется однородным линейным уравнением; в противном случае уравнение называется
неоднородным. Например, уравнение второго порядка
х2у" + 2ху' + Зу = cos x
— неоднородное; соответствующее ему1 однородное уравнение —
х2у" + 2ху' + Зу = 0.
В общем случае, для уравнения B) соответствующее ему однородное линейное уравнение
имеет вид
> А(х)у" + В{х)у' + С(х)у = 0. C)
Если дифференциальное уравнение B) моделирует некоторую физическую систему, то
неоднородный член F(x) часто соответствует какому-либо внешнему воздействию на систему.
Стандартное применение
Линейные дифференциальные уравнения часто представляют собой математические
модели механических систем и электрических цепей. Предположим, например, что к телу
(материальной точке) массой т с одной стороны присоединена пружина, действующая на
него с силой Fs, а с другой — амортизатор, действующий на него с силой Fr (рис. 3.1.1).
Будем также считать, что сила упругости Fs пружины пропорциональна смещению х тела
относительно положения равновесия (положительного при смещении вправо и
отрицательного при смещении влево), а сила действия амортизатора Fr пропорциональна скорости
тела v = dx/dt. На рис. 3.1.2 показано направление действия этих сил:
Fs = — кх и Fr = —cv (к9 с > 0).
т
х, v >0
Рис. 3.1.2. Направления сил,
действующих на
материальную точку массой т
Заметим, что знаки "минус" поставлены верно — Fs отрицательна при доложительных ж,
a Fr отрицательна при положительных v. Из второго закона Ньютона F = та следует
mx" = Fs + FR; s D)
Пружина Масса Амортизатор
^—(Щ) '
I x(t) |
jc = 0 jc>0
Положение
равновесия
Рис. 3.1.1. Система, состоящая из
тела заданной массы,
закрепленного на пружине с амортизатором
Называемое также иногда ассоциированным с ним. — Примеч. перев.
3.1. Введение: линейные уравнения второго порядка 221
иными словами,
сРх dx
> т—> + с— + кх = 0. E)
dtz at
Таким образом, мы получили дифференциальное уравнение, которому удовлетворяет
значение координаты x(t) тела массой га. Это однородное линейное уравнение второго порядка
описывает свободные колебания материальной точки; мы вернемся к этому в разделе 3.4.
Если, к тому же, кроме Fs и Fr на точечную массу т действует внешняя сила F(t)9 ее
необходимо добавить к правой части уравнения D) и в результате мы получим уравнение
d х dx „, ч
> m^+cTt+kx=F{t)- F)
Это неоднородное линейное дифференциальное уравнение характеризует вынужденные
колебания материальной точки под действием внешней силы F(t).
Однородные линейные уравнения второго порядка
В общем случае линейное дифференциальное уравнение второго порядка имеет вид
А{х)у" + В(х)у' + С(х)у = F{x), G)
где функции А9 В9 С и F непрерывны на открытом интервале J. Кроме того, мы будем
предполагать, что А(х) ф 0 во всех точках интервала /. Следовательно, мы можем разделить
все слагаемые в уравнении G) на А(х) и записать его в виде
> y"+p{x)y'+q(x)y = f{x)- (8)
Рассмотрим соответствующее однородное уравнение
> y"+p{x)y' + q{x)y = 0. (9)
Очень полезным свойством решений этого однородного линейного уравнения является то,
что и сумма любых двух его решений, и решение, умноженное на произвольную постоянную,
также будут решениями. Об этом пойдет речь в следующей теореме.
Теорема 1
Принцип ёуперпо^ицйи до
Пусть 2/i и t/2 — два решения однородного линейного дифференциального уравнения (9) на
интервале /. Тогда для любых постоянных с\ и сг линейная комбинация
У = cm 4- с2у2 A0)
также является решением уравнения (9) на /.
Доказательство. Утверждение теоремы немедленно следует из линейности операции
дифференцирования:
У' = ci2/i + с22/2 и У" = ci2/i + с22/2 •
222 Глава 3. Линейные уравнения высших порядков
Иными словами,
у" +ру' + qy~ (ciyi + С2У2)" + P{ciy\ 4- С2У2)' 4- q(ciyi + c2y2)
= {р\У\ + С2У2) +р(сгу[ 4- С2У2) + qicxyi 4- с2?/2)
= cxd/i''+РУ1 + QVi) 4- с2(у2 +И/2 + W2)
= ci • 0 + c2 • 0 = О,
так как ух и у2 являются решениями уравнения. Следовательно, функция
У = сгуг 4- с2у2
также является решением.
Пример 1
Непосредственной проверкой легко убедиться, что функции
2/i (rr) = cos х и у2 {х) — sin х
представляют собой два решения уравнения
у" + У = 0.
Из теоремы 1 следует, что любая их линейная комбинация, например
у(х) = Зуг(х) — 2у2(ж) = Зсовж — 2 sin ж,
также является решением. Позже мы увидим, что и наоборот, каждое
решение у" 4- у == 0 является линейной комбинацией этих двух
частных решений у\ и у2. Поэтому решения уравнения у11 Л-у = 0 имеют
следующий общий вид:
у(х) = с\ cos х 4- с2 sin x.
Важно отметить, что одна эта формула для общего решения дает
"бесконечное" семейство частных решений, зависящее от двух параметров,
каждый из которых может принимать бесконечно много значений. (Ведь
оба коэффициента ci и с2 могут быть выбраны независимо). На рис. 3.1.3-
3.1.5 показаны некоторые возможные решения при с\ или с2, равных
нулю, а также при ненулевых значениях обоих этих параметров ■
Ранее в этом разделе мы получили уравнение движения материальной точки тх" 4-
+ сх' 4- кх = F(t) (см. рис. 3.1.1). С физической точки зрения движение материальной
точки полностью определяется ее начальным положением и скоростью. Следовательно, для
любых начальных значений х@) и ж'@), уравнение F) должно иметь единственное
решение, которое удовлетворяет этим начальным данным. В общем случае, для того чтобы
быть "хорошей" математической моделью детерминированного физического явления,
дифференциальное уравнение должно иметь единственное решение, удовлетворяющее любым
подходящим начальным данным. Следующая теорема существования и единственности
решения (ее доказательство приведено в приложении) подтверждает это для общего уравнения
второго порядка.
3.1. Введение: линейные уравнения второго порядка 223
8
6
4
2
ъ О
-2
-4
-6
-8
k £
g? \ч
I I
с\ = 5 J
q = -5
О
щ
Рис. 3.1.3. Решения вида
у(х) = cicosx уравнения
2/" + </ = G
Рис. 3.1.4. Решения вида
у(х) = C2sinrr уравнения
2/' + У = 0
Рис. 3.1.5. Решения уравнения у"+у — Оприненулевых
значениях с\ и с2
Теорема 2
Существование и единственность решения линейного
уравнения
Предположим, что функции р, qn f непрерывны на открытом интервале J, содержащем
точку о. Тогда для любых bo и Ь\ уравнение
У"' + р{х)у' + q(x)y = f{x)
(8)
имеет единственное (т. е. ровно одно) решение на интервале J, которое удовлетворяет
начальным условиям
у (а) = Ь0у у'{а) = Ьь
(И)
А
Замечание 1. Уравнение (8) и условия A1) представляют задачу с начальными
условиями (данными), иди задачу Коши для линейного уравнения второго порядка.
Теорема 2 утверждает, что любая такая задача имеет единственное решение на всем интервале
224 Глава 3. Линейные уравнения высших порядков
I непрерывности коэффициентов уравнения (8). Напомним, что в общем случае (раздел 1.3)
для нелинейного дифференциального уравнения, единственность решения можно
гарантировать лишь на меньшем интервале.
Замечание 2. Хотя дифференциальное уравнение первого порядка dy/dx = F(x, у)
в общем случае допускает лишь одно решение у = у(х), график которого проходит через
заданную точку (а, Ь), из теоремы 2 следует, что для уравнения второго порядка (8)
решений, графики которых проходят через точку (а, Ьо)> бесконечно много, поскольку каждому
(действительному) значению наклона у1 {а) = Ь\ касательной в данной точке
соответствует свое решение. Таким образом, несмотря на то, что лишь одна прямая касается графика
данного решения в точке (а, Ьо), каждая невертикальная прямая, проходящая через (а, Ьо),
является касательной к графику некоторого решения. На рис. 3.1.6 изображено несколько
графиков решений уравнения у" -Ь Ъу' -f 2y = 0 с одним и тем же начальным значением
2/@) = 1. На рис. 3.1.7 изображено несколько графиков решений с одним итем же начальным
углом наклона касательной у' @) = 1. В приложении в конце этого раздела рассматривается
вопрос построения таких семейств кривых—графиков решений для заданного однородного
линейного уравнения. ■
3
2
1
0
-1
—\ 1 1 г
ДО) = 6
;1ГЧ У@) = 0
-к
\
ДО) = -6
-1 0 1
2 3 4 5
х
Рис. 3.1.6. Решения у" + Ъу' -Ь
+ 2у = 0 с одинаковым
начальным значением у@) = 1, но
с разными касательными
/
У@) = 3
У@) = 0
**Щш-^
\
У@) = -3
J L_
-10 12 3 4
х
Рис. 3.1.7. Решения у"+З2/+
+ 2у = 0 с одинаковыми
касательными у'@) = 1, но с
разными начальными значениями
Пример 1
Продолжение
В первой части примера 1 мы увидели, что у(х) = 3 cosx — 2 sin ж
является решением уравнения у" + у = 0 на всей действительной оси.
Его начальные значения у@) = 3, у'@) = —2. Согласно теореме 2, это
единственное решение с такими начальными данными. В общем случае
функция
у(х) — b0 cos ж + bi sin ж
удовлетворяет произвольным начальным данным у@) = Ьо,у'@) = Ь\\
отсюда следует существование такого решения (как и из теоремы 2). ■
В примере 1 показано, как для заданного однородного линейного уравнения второго
порядка можно найти решение у{х), существование которого гарантируется теоремой 2.
Сначала нужно найти два "существенно разных" решения угиу2'9 затем попытаться найти
3.1. Введение: линейные уравнения второго порядка 225
такое общее решение
У = сгуг + с2у2, A2)
которое удовлетворяет начальным условиям у (а) = Ьо,у'{а) = 6i,t. е. попытаться решить
систему уравнений
c\yi{a) + с2у2{о) = Ъ0,
ciy[(a) + с2у'2(а) =Ъг
A3)
относительно коэффициентов схис2.
Пример 2
Проверить, что функции
yi{x)=ex и у2(х)=хех
являются решениями уравнения
у" - 2yf + у = О,
и затем найти решение, удовлетворяющее начальным условиям у@) = 3,
уЩ = 1.
Решение Проверка выполняется стандартным образом; мы пропустим ее.
Подставив в начальные условия общее решение
у(х) = сгех + с2хех,
для которого
у' (х) = (ci + с2)ех + с2хех,
мы получим систему уравнений
2/@) =ci =3,
у/@)=С1+С2 = 1.
Еерешениес! = 3,сг = —2. Таким образом, решение поставленной
задачи Коши (задачи с начальными условиями) представляет собой функцию
у (ж) = Зех - 2хех.
На рис. 3.1.8 изображено несколько решений у" — 2у' 4- у = 0 с
одинаковым начальным значением у@) = 3. ■
Чтобы гарантировать успешное выполнение процедуры из примера 2, решения у\ и у2
должны обладать следующим нетривиальным свойством: система A3) должна иметь
решения с\ и с2 для любых значений Ьо и bi. Следующее определение строго описывает, насколько
разными должны быть функции угиу2.
226 Глава 3. Линейные уравнения высших порядков
Рис. 3.1.8. Различные решения у (х) = Зех+С2хех
уравнения у"—2у' 4-у = 0 с одинаковым начальным значением
</@) = 3
Определение. Линейная независимость двух функций
Две функции, определенные на некотором интервале J, называются линейно
независимыми на этом интервале I, если на нем ни одна из них не равна произведению другой на
некоторую постоянную.
Две функции называются линейно зависимыми на открытом интервале, если они не
являются линейно независимыми; т. е. одна из них равна произведению другой на константу.
Мы всегда можем установить, являются ли данные функции f ид линейно зависимыми на
интервале /, проверив, является ли постоянным хотя бы одно из отношений2 f/g или g/f
на/.
Пример 3
Понятно, что следующие пары функций линейно независимы на всей
действительной оси:
sin ж
ех
ех
ж + 1
X
и
и
и
и
и
COS X]
е-2*;
хех\
*2;
|х|.
Иными словами, ни функция sin x/ cos х — tg x ни функция cos x/ sin x =
= ctgrr; ни функция ех/е~2х = е3ж, ни функция е~2х/ех не является
постоянной, и т. д. Заметим, что функция f(x) = 0, тождественно равная
нулю, и любая функция д линейно зависимы на любом интервале, так как
0 • д{х) — 0 = f{x). Функции
f{x) = sin2a: и д{х) = sin x cos ж
2 Случай, когда хотя бы одна из функций тождественно равна нулю, очевиден: в этом случае функции линейно
зависимы. — Примеч. ред.
3.1. Введение: линейные уравнения второго порядка 227
тоже линейно зависимы на любом интервале, так как равенство
f(x) = 2д(х)
представляет собой известное тригонометрическое тождество sin 2х =
= 2 sin х cos x. ■
Общие решения
Всегда ли однородное линейное уравнение у" +ру'4-qy = 0 имеет два линейно независимых
решения? Из теоремы 2 следует, что да! Нам необходимо лишь выбрать у\ и у2 так, чтобы
2/1 (а) = 1, у[(а) = 0 и у2{а) = О, у2(а) = 1.
Тогда не может быть верным ни равенство у\ = ку2, ни равенство^ = ку\9таккакк -0^1
для любой постоянной к. По теореме 2, два таких линейно независимых решения
существуют; вообще говоря, нахождение их является ключевой задачей, которую мы вкратце
рассмотрим в конце этого раздела, а более подробно разберем в начале раздела 3.3.
Покажем, что, зная любые два заданных линейно независимых решения у\ и у2
однородного уравнения
у"{х) + р(х)у'{х) + q(x)y{x) = 0, (9)
любое решение у уравнения (9) можно представить в виде линейной комбинации
} У = С1уг+с2у2 A2)
этих решений у \ и у2. Это означает, что функция, заданная в A2), является общим решением
уравнения (9) — из нее могут быть получены все возможные решения дифференциального
уравнения.
Из уравнений A3) следует, что константы с\ и с2 в A2) зависят от некоторого
определителя второго порядка (т. е. определителя матрицы размера 2x2) значений функций ух, у2
и их производных. Определителем Вронского3 двух заданных функций /и д называется
определитель
W =
Г 9'
= fg'-f'9-
Мы будем обозначать его W(f,g) или W(x)9 в зависимости от того, что мы хотим
подчеркнуть — его зависимость от функций или от точки ж, в которой необходимо посчитать
определитель Вронского. Примеры определителей Вронского:
W(cosx, sin ж) =
cos x sm x
- sin x cos x
= cos2 x + sin2 x
W{ex,xex) =
e xe
ex ex 4- xex
— e
2x
Или вронскианом. — Примеч. ред.
228 Глава 3. Линейные уравнения высших порядков
Это определители Вронского линейно независимых пар решений линейных
дифференциальных уравнений (см. примеры 1 и 2). Заметим, что определители Вронского в данном
случае нигде не равны нулю.
С другой стороны, если функции / и д линейно зависимы, например f = kg, то
W(f,g) =
kg g
kg' g'
кдд' - кд'д = 0.
Иными словами, определитель Вронского линейно зависимых функций тождественно
равен 0. В разделе 3.2 мы докажем, что если две функции у\ и у2 являются решениями
однородного линейного дифференциального уравнения второго порядка, то имеет место
и утверждение, обратное сформулированному в пункте (Ь) теоремы 3.
Теорема 3
Вронскианы решений ;
Пустьу! иу2 —два решения однородного линейного дифференциального уравнения второго
порядка
у" + p(x)yf + q(x)y = 0
на открытом интервале /, на котором функции р и q непрерывны.
(a) Если 2/i и t/2 линейно зависимы, то W(yi, 3/2) = 0 на /.
(b) Если ух и у2 линейно независимы, то W{y\ ,2/2) Ф 0 ни в одной точке интервала /.А
Следовательно, для двух решений уравнения (9) возможен лишь один из двух случаев —
либо определитель Вронского W тождественно равен нулю (так будет, если решения
линейно зависимы), либо определитель Вронского нигде не обращается в нуль (так будет, если
решения линейно независимы). Теперь покажем, что у = с\у\ 4- С2У2 — общее решение
уравнения (9), если у\ и у2 — линейно независимые решения.
Теорема 4
Общие решения однородных уравнений
Пусть 2/i и t/2 — два линейно независимых решения однородного уравнения (9)
у" + р{х)у' + q(x)y = 0,
причем р и q непрерывны на открытом интервале /. Если У — произвольное решение
уравнения (9) на J, то существуют такие постоянные с\ и С2, что
Y{x) = С1уг(х) + с2у2(х)
для всех х из I. А
По существу, теорема 4 гласит, что если известны два линейно независимых решения
однородного уравнения второго порядка (9), то можно найти все его решения. Поэтому
линейную комбинацию У = с\у\ Л-С2У2 мы называем общим решением дифференциального
уравнения.
3.1. Введение: линейные уравнения второго порядка 229
Доказательство теоремы 4. Зафиксируем точку а из интервала I и рассмотрим систему
уравнений
ciyi(a) + c2t/2(a) = У {а),
ciy[(a) + с2г/2(а) = Y'(a).
Определитель этой системы уравнений относительно неизвестных с\ и с2 — просто
определитель Вронского W (t/i, г/2) в точке х = а. По теореме 3 он не равен нулю, поэтому из
простого алгебраического утверждения следует, что A4) имеет решения с\ и с2. С помощью
значений^! и с2 мы находим решение
G{x) = ciyxix) + с2г/2(х)
уравнения (9); тогда
G(a) = ciyi(a) + c2t/2(a) = Г (a)
и
G'(a) = cl2/i(a) + c2y'2(a) = Г (a).
Следовательно, Y и G, а также У и G' имеют одинаковые значения в точке а. Из
единственности решения, определенного начальными данными (теорема 2), следует, что Y и G
совпадают на /. Отсюда
У(ж) = G(x) = ciyi(rr) + с2г/2(х),
что и требовалось доказать. А
Пример 4
Пусть J/1 (х) = е2х и уг (а;) = е 2х, тогда
у'/ = B)B)е2* = 4е2* = 4У1 и у£ = (-2)(-2)е* = 4e~2* = 4у2.
Следовательно, t/i и г/2 — линейно независимые решения
г,"-4г/ = 0. A5)
Но уз(х) = cosh 2х и у±(х) = sinh 2x также являются решениями
уравнения A5), так как
d2 d
-r-r-(cosh2x) = — B sinh 2x) = 4cosh2x
dxz dx
и, аналогично, (sinh 2x)" = 4 sinh 2x. Тогда из теоремы 4 следует, что
cosh 2x и sinh 2x являются линейными комбинациями решений у\ (х) =
= е2х и г/2(х) = е~2х. Конечно, это неудивительно, ведь
cosh 2х = \е2х + \е~2х и sinh 2х = |е2х - |е*
по определению гиперболических косинуса и синуса. ■
230 Глава 3. Линейные уравнения высших порядков
Замечание. Поскольку е2х, е~~2х и coshx, sinhx — две пары линейно независимых
решений уравнения у"—4у = 0, по теореме 4 каждое частное решение Y(х) этого уравнения
может быть записано и в виде
y(x) = cie2x+'c2e-2x,
и в виде
Y(x) = a cosh х + bsinhx.
Следовательно, эти две линейные комбинации (с произвольными постоянными
коэффициентами) задают два различных описания множества частных решений одного и того же
уравнения у" — 4г/ = 0, т. е. обе они являются общим решением этого уравнения. Поэтому
правильнее называть такую линейную комбинацию "произвольным общим решением", а не
"конкретным общим решением". ■
Линейные уравнения второго порядка с постоянными
коэффициентами
В качестве иллюстрации общей теории, представленной в этом разделе, мы рассмотрим
однородное линейное дифференциальное уравнение
> ш/" + Ьг/ + сг/ = 0 A6)
с постоянными коэффициентами а, Ь и с. Сначала найдем одно решение уравнения A6).
Заметим, что
(е™)' = гегх и (егх)" = г2егх, A7)
т. е. любая производная функции егх является произведением егх на константу. Поэтому
если мы подставим у = егх в A6), то все слагаемые будут представлять собой функцию
егх, умноженную на постоянную, зависящую от г и коэффициентов а, Ь и с. Поэтому можно
попытаться найти такое значение г, при котором сумма коэффициентов при егх равна нулю.
Если такое г найти удастся, то функция у = егх и будет решением уравнения A6).
Например, при подстановке у = егх в уравнение
у" - Ъу' + 6у = 0,
получим
r2erx-brerx + 6erx = 0.
Отсюда
(г2 - Ъг + 6)егх = 0; (г - 2) (г - 3)егх = 0.
Таким образом, у = егх является решением уравнения при г = 2 и г = 3. Итак, пытаясь
найти одно решение, мы, вообще говоря, можем найти два: у\ (х) = е2х и г/2 (х) = е3х.
Чтобы реализовать подобный алгоритм в общем случае, подставим у = егх в A6). Из
равенств A7) получим
ar2erx + brerx + cerx = 0.
Поскольку егх нигде не обращается в нуль, у(х) = егх будет удовлетворять
дифференциальному уравнению A6) тогда и только тоща, когда г — корень алгебраического уравнения
> аг2 + 6г + с = 0. A8)
3.1. Введение: линейные уравнения второго порядка
231
Это квадратное уравнение называют характеристическим уравнением однородного
линейного дифференциального уравнения
ау" + Ъу' + су = 0.
A6)
Если уравнение A8) имеет два различных (неравных) корня п и г2, тогда соответствующие
решения у\(х) = еГ1Хиу2(х) = еГ2Х уравнения A6) линейно независимы. (Почему?) Имеем
следующий результат.
Теорема 5
,?./-«■+•**. ,•%■* -,у.^Щ к
t ->., J --,, *##!,■ ,
Случай различи
Случай различных действительных корней
Если корни ri и Г2 характеристического уравнения A8) действительные и различные, то
функция
> у(х) = сгеГ1Х + с2еГ2Х
является общим решением уравнения A6).
A9)
▲
Пример 5
Найдем общее решение уравнения
2у" - 1у' + Ъу = 0.
Решение Характеристическое уравнение
2г2 - 7г + 3 = 0
можно решить, разложив левую часть на множители:
Bг-1)(г-3) = 0.
Корни ri = \ и гг = 3 действительны и различны, поэтому по теореме 5
общим решением будет
у(х) = ciex/2 + с2е
03х
Пример 6
Для дифференциального уравнения у" + 2у' = 0 характеристическое
уравнение имеет вид
г2 + 2г = г(г + 2) = 0
Оно имеет два различных действительных корня г\ = 0 и г2 = —2.
Поскольку е°'х = 1, общее решение имеет вид
у{х) =а+с2е-2х.
На рис. 3.1.9 изображено несколько различных графиков решений при
с\ = 1, причем каждое решение стремится к у(х) = 1 (т. е. к решению
с С2 = 0) при х —у +оо. ■
232 Глава 3. Линейные уравнения высших порядков
Рис. 3.1.9. Решения у(х) = 1 + с2е 2х уравнения у" +
+ 2у' = 0 при различных с2
Замечание. Заметим, что теорема 5 сводит решение дифференциального уравнения
к решению алгебраического уравнения. ■
Если у характеристического уравнения A8) корни равны г 1 = гг, то мы можем (поначалу)
получить лишь одно решение у\ (х) = еГ1Х уравнения A6). Задача в этом случае сводится
к получению "недостающего" второго решения дифференциального уравнения.
Корень кратности два г = г\ может появиться только тогда, когда характеристическое
уравнение с точностью до некоторой постоянной имеет вид
(г — г\J = г2 — 2т\т + т\ = 0.
Тогда дифференциальное уравнение эквивалентно следующему:
у" - 2гц/ + т\у = 0. B0)
Но в этом случае простой подстановкой легко убедиться, что функция у = xeTlX является
вторым решением уравнения B0). Очевидно (но вам стоит проверить!), что функции
2/1 (ж)
и у 2 (х) = хеГ1Х
линейно независимы, т. е. общее решение дифференциального уравнения B0) имеет вид
у(х) = аеГ1Х + с2хеГ1Х.
Теорема 6
Случай кратных корней
Если у характеристического уравнения A8) два одинаковых (но обязательно
действительных) КОрНЯ 7*1 = Г2, ТО
' > У(х) = (ci + c2x)eria
является общим решением уравнения( 16).
B1)
А
3.1. Введение: линейные уравнения второго порядка 233
Пример 7
Для решения задачи Коши (задачи с начальными условиями)
у" + 2у' + у = 0;
»@) = 5, у'(о) = -з
заметим, что у характеристического уравнения
г2 4- 2г + 1 = (г + IJ = 0
два равных корня г\ = г2 = — 1. Поэтому по теореме 6 общее решение
имеет вид
у(х) = с\е~х 4- с2хе~*.
Продифференцировав, имеем
у\х) = -cie-* + с2е_ж - с2хе~х.
Подстановка начальных данных приводит к системе уравнений
2/@) = ci =5,
г/'@) = -ci + с2 = -3,
откуда следует, что с\ — 5 и с2 = 2. Так что требуемое частное решение
есть
у{х) = 5е"ж Ч- 2хе~х.
Это частное решение вместе с некоторыми другими вида у (х) — с\ё~х +
+ 2хе~х изображено на рис. 3.1.10. ■
-4-3-2-1012345
Рис. 3.1.10. Решения у{х) = с\е х Л- 2хе х уравнения
у" 4- 2у' + 2/ = 0 с различными значениями ci
Характеристическое уравнение A8) может иметь как действительные, так и комплексные
корни. Случай комплексных корней будет рассмотрен в разделе 3.3.
234 Глава 3. Линейные уравнения высших порядков
3.1» Задачи
В задачах 1-16 даны однородное линейное дифференциальное уравнение второго порядка, две
функции уг и у2 и начальные данные. Сначала проверьте, что функции у\ и у2 являются
решениями дифференциального уравнения, затем найдите частное решение у = с\у\ 4- С2У2, которое
удовлетворяет заданным начальным условиям. Штрихи везде обозначают производные по х.
1. у" - у = 0; 2/i = ех, у2 = е~х; у@) = 0, у'@) = 5
2. у" - 9у = 0; 2/1 = е3х, у2 = е*; у@) = -1, у'@) = 15
3. у" + 4у = 0; яд = cos 2ж, у2 = sin 2ж; у@) = 3, у'@) = 8
4. у" + 25у = 0; yi = cos 5ж, у2 = sin 5ж; у@) = 10, у'@) = -10
5. у" - Зу' 4- 2у = 0; yi = ех, у2 = е2х; у@) = 1, у'@) = 0
6. у" + у' - 6у = 0; ух = е2*, у2 = еаг; у@) = 7, у'@) = -Д
7. у" 4- у' = 0; ух = 1, у2 = е~х; у@) = -2, у'@) = 8
8. у" - Зу' = 0; yi = 1, у2 = е3х; у@) = 4, у'@) = -2
9. у" -f 2у' 4- у = 0; yi = е"ж, у2 = же"*; у@) = 2, у'@) = -1
10. у" - 10у' 4- 25у = 0; yi = е5*, у2 = же**; у@) = 3, у'@) = 13
11. у" - 2у' 4- 2у = 0; yi = ех cos ж, у2 = ех sin ж; у@) = 0, у'@) = 5
12. у" 4- 6у' 4- 13у = 0; yi = е~3х cos 2ж, у2 = е~3х sin 2ж; у@) = 2, у'@) = 0
13. х2у" - 2ху' 4- 2у = 0; У1 *= я, у2 = ж2; уA) = 3, у'A) = 1
14. ж2у" + 2жу' - 6у = 0; yi = ж2, у2 = ж; уB) = 10, у'B) = 15
15. х2у" - ху' 4- у = 0; yi = ж, у2 = ж In ж; уA) = 7, у'A) = 2
16. ж2у" И- жу' 4- у = 0; yi = совAпж), у2 = зтAпж); 2/A) = 2, у'A) = 3
На примере следующих трех задач видно, что принцип суперпозиции для нелинейных уравнений,
вообще говоря, не выполняется.
17. Покажите, что функция у = 1/ж является решением уравнения у' Л- у2 = 0, но при с Ф 0
неф! функция у = с/ж решением не является.
18. Покажите, что функция у = ж3 является решением у у" = 6ж4, но при с2 ф\ функция у = еж3
решением не является.
19. Покажите, что функции yi = 1 и у2 = у/х являются решениями уравнения уу" Л-{у'J = 0, но
их сумма у = yi -Ь у2 решением не является.
В задачах 20-26 определите, являются ли данные пары функций линейно независимыми на
действительной оси. ,
20. /(ж) = 7Г, g(x) = cos2 ж 4- sin2 ж 21. /(ж) = ж3, д(х) = ж2|ж|
22. /(ж) = 1 4- ж, д(х) = 1 4- |ж| 23. /(ж) = хех, д(х) = |ж|ех
24. /(ж) = sin2 ж, д(х) — 1 — cos 2ж 25. /(ж) = еж sin ж, р(ж) = еж cos ж
26. /(ж) = 2 cos ж 4- 3 sin ж, д(х) = 3 cos ж — 2 sin ж
27. Пусть ур — частное решение неоднородного дифференциального уравнения у" 4- ру' 4- qy =
= /(ж), а ус — решение соответствующего однородного уравнения. Покажите, что у = ус 4- уР
также является решением данного неоднородного уравнения.
28. Зная, что в условии задачи 27 решениями уравнения у" + у = 1 являются функции ур =
= 1 и ус = ci cos ж 4- с2 sin ж, найдите то решение этого уравнения, которое удовлетворяет
начальному условию у@) = —1 = у'@)«
3.1. Введение: линейные уравнения второго порядка 235
29. Покажите, что у\ = х2 и у2 = х3 — два различных решения уравнения х2у" — 4ху' + 6у = О,
каждое из которых удовлетворяет начальным данным у@) = 0 = 2/@). Объясните, почему это
не противоречит утверждению о единственности решения в теореме 2.
30. (а) Покажите, что 2/1 = х3 и 2/2 = \х3\ — линейно независимые (на действительной оси)
решения уравнения х2у" — Зху' + Зу = 0. (Ь) Проверьте, что определитель Вронского W (yi, 2/2)
тождественно равен нулю. Почему это не противоречит утверждению теоремы 3?
31. Покажите, что 2/1 = sin x2 и уг = cos ж2 — линейно независимые функции, но их определитель
Вронского равен нулю при х = 0. Почему из этого следует, что не существует
дифференциального уравнения вида у" + р{х)у' + q(x)y — 0 с непрерывными на всей действительной оси
коэффициентами pnq, решениями которого являются у\ и 2/2?
32. Пусть 2/1 и 2/2 — два решения уравнения А{х)у" + В{х)у' + С(х)у — 0 на открытом интервале
/, где Л, Б и С непрерывны и Л(х) нигде не обращается в нуль, (а) Пусть W = W^yi, уг).
Покажите, что
Л(а;)^- = (w)(^') - G*)Mwi).
Выразив Лу2' и Ау" из исходного дифференциального уравнения, покажите, что
А{х)^ =-B(x)W(x).
(b) Решив это дифференциальное уравнение, докажите формулу Абеля
Ж(*) = *ехр(-||М<**),
где К — некоторая постоянная, (с) Как с помощью формулы Абеля доказать, что
определитель Вронского W B/1,2/2) либо тождественно равен нулю, либо нигде не обращается в нудь
(утверждение теоремы 3)?
В задачах 33-42 найдите общие решения дифференциальных уравнений, используя теоремы 5 и 6.
Штрихи обозначают производные по х.
33. у" - 32/' + 2у = 0 34. у" + 2у' - 15у = 0
35. у" + 52/ = 0 36. 22/" + Зу' = 0
37. 2у" - у' - у = 0 38. 4у" + 8у' + Зу = 0
39. 4у" + 4у' + у = 0 40. 9у" - 12у' + 4у = 0
41. 6у" - 7у' - 20у = 0 42. 35у" - у' - 12у = 0
В задачах 43-48 даны общие решения у(х) однородных дифференциальных уравнений второго
порядка с постоянными коэффициентами ау" + Ъу' + су = 0. Найдите соответствующие уравнения.
43. у(х) = ci + с2е-10я: 44. у(ж) = ае10х + cse0*
45. у(х) = ае-10х + с2хе-10* 46. у(х) = cie10x + с2е100х
47. у(х) = ci + с2х 48. у(х) = е* (аехл/2 + сге"*^)
5 задачах 49 и 50 рассматриваются графики решений уравнения у" + Зу' + 2у = 0, изображенные
на рис. 3.1.6 и 3.1.7.
49. Найдите наивысшую точку на той интегральной кривой, которая изображенна на рис. 3.1.6
и удовлетворяет условиям y@J = 1 и у'@) = 6.
50. Найдите на рис. 3.1.7 точку пересечения интегральных кривых в третей четверти.
236 Глава 3. Линейные уравнения высших порядков
51. Уравнение Эйлера второго порядка имеет вид
ах2у" + Ьху' + су = 0 B2)
где а, Ь, с — постоянные, (а) Покажите, что если х > 0, то с помощью подстановки v — In x
уравнение B2) приводится к линейному уравнению с постоянными коэффициентами
относительно неизвестной переменной v. (b) Покажите, что если корни п и Г2
характеристического уравнения дифференциального уравнения B3) действительны и различны, то общее
решение уравнения Эйлера B2) — у(х) = axTl 4- сгж7*2.
В задачах 52-56 найдите общие решения уравнений Эйлера (для х > 0), сделав подстановку
v = In х из задачи 51.
52. х2у" 4- ху' - у = 0 53. х2у" 4- 2ху' - Yly = 0 v
54. 4хУ 4- Sxy' - Зу = 0 55. х2у" 4- ху' = 0
56. ж2?/" - ЗаУ 4- 4у = 0
3.1. Приложение. Построение графиков семейств
решений уравнений второго порядка
В этом приложении будет идти речь о построении семейств решений уравнений на
компьютере (таких как на рис. 3.1.6 и 3.1.7). Покажите, что общее решение уравнения
у,, + 3у/ + 2у = 0 , A)
имеет вид
у(х)=С1е-х + с2е-2х. B)
Для рис. 3.1.6, покажите, что частное решение уравнения A), удовлетворяющее
начальным данным у@) = 1,2/'@) = Ь, представляет собой функцию
г/(х) = (Ь + 2)е--F + 1)е-2ж. C)
С помощью следующего цикла на входном языке системы Matlab:
х = - 1 : 0.02 : 5 % х - вектор от х з - 1 до х = 5
for b = -6 : 2 : 6 % для b = -6 до 6 шаг db = 2 выполнить
у = (Ь + 2)*ехр(-х) - (Ь + 1) *ехр(-2*х) ;
plot(х,у) ,
end
был создан рис. 3.1.6.
Покажите для рис. 3.1.7, что частное решение уравнения A), удовлетворяющее
начальным условиям г/@) = а, у'@) = 1, задается формулой
у{х) = Bа 4- 1)е~х - (а 4- 1)е~2х. D)
3.2. Общие решения линейных уравнений 237
С помощью следующего цикла на входном языке системы Matlab:
х = -2 : 0.02 : 4 % х - вектор от х = -2 до х = 4
for а = -3 : 1 : 3 % для а = -3 до 3 шаг da = 1 выполнить
у = B*а + 1)*ехр(-х) - (а + 1)*ехр(-2*х);
plot(х,у)
end
был создан рис. 3.1.7.
Графические калькуляторы (т. е. калькуляторы с возможностью построения графиков)
и системы компьютерной алгебры {такие как Maple и Mathematica) могут выполнять циклы
for, подобные приведенным выше. Сначала попытайтесь с их помощью начертить рис. 3.1.6
и 3.1.7. Затем постройте те семейства решений следующих уравнений, которые
удовлетворяют условию либо 2/@) = 1, либо условию у' @) = 1.
1.у"-у = 0 2. г/"-Зг/' + 2г/ = 0
3.2у" + Зу' + у = 0 4. у" + у = 0 (см. пример 1)
5. у" 4- 2yf + 2у = 0, общее решение которого у(х) = е~х{с\ cos x -f сг sin x).
3.2. Общие решения линейных уравнений
Теперь мы естественным образом обобщим изложенное в разделе 3.1 для линейных
уравнений второго порядка на случай линейного дифференциального уравнения n-го порядка
вида
Ро (*)г/(п) + Pi(*J/(n-1} + • • • + Pn-i(x)y' + Pn(x)y = F{x). A)
Мы всегда (если не сказано иное) будем предполагать, что (известные) функции Pi (x) и F (х)
непрерывны на некотором, возможно неограниченном интервале / (на котором мы хотим
найти решение уравнения). Если дополнительно предположить, что Р<э(#) ¥" 0 всюду на
/, мы можем разделить все слагаемые в уравнении A) на Ро(х) (чтобы коэффициент при
старшей производной был равен 1)
► У{п) + Pi (х)у{п-1] + • • • +Рп-гШ +Рп(х)у = f{x). B)
Однородное линейное уравнение, соответствующее уравнению B), представляет собой
уравнение
> У{п) +Pi(*)y(n-1) + •' * +Pn-i(x)y' +pn(x)y = 0. C)
Каки для уравнения второго порядка, однородное линейное дифференциальное уравнение п-
го порядка обладаеттем свойством, что любаялинейноя комбинация решений также является
решением. Доказательство последующей теоремы с точностью до технических деталей
аналогично доказательству теоремы 1 раздела 3.1.
238 Глава 3. Линейные уравнения высших порядков
Принцип суперпозиции для однородных уравнений
Теорема 1
Пусть ух, г/2, • •., Уп —решения однородного уравнения C) на интервале I. Тогда при любых
постоянных с\9 С2,..., сп линейная комбинация
> У = ciyi + c2t/2 + h спуп D)
также является решением уравнения C) на J. * А
Пример 1
Легко проверить, что функции
У\{х) = е~3х, 2/2 (х) = cos2x и уз(х) = sin2x
являются решениями однородного уравнения третьего порядка
у(з) + зг/" + 4г/'+ 12г/= О
на всей действительной оси. По теореме 1 любая линейная комбинация,
в частности
у(х) = -32/1 (х) + Зу2(х) - 2г/3(х) = -Зе~3х 4- 3cos2x - 2sin2x,
также является решением на всей действительной оси. В дальнейшем
мы увидим, что верно и обратное утверждение: каждое уравнение
является линейной комбинацией у и 2/2 и 2/з- Поэтому общее решение этого
уравнения может быть представлено в виде
у(х) = С\е~Ъх 4- С2 cos 2x 4- сз sin 2x. ■
Существование и единственность решений
В разделе 3.1 было показано, что частное решение линейного уравнения второго
порядка однозначно определяется двумя начальными условиями. Аналогично, частное решение
линейного дифференциального уравнения n-го порядка задается п начальными условиями.
Следующая теорема является естественным обобщением теоремы 2 раздела 3.1
(доказательство приведено в приложении).
Теорема 2
Существование и единственность решений линейных
дифференциальных уравнений
Пусть функции pi, р2,..., Рп и / непрерывны на открытом интервале /, содержащем точку
а. Тогда для любых заданных п чисел Ьо» bi 6n_i линейное уравнение n-го порядка
(уравнение B))
y*n> +pi(x)y(n-V + ... +рп-1(х)у'+рп(х)у = f(x)
имеет единственное (т. е. ровно одно) решение на всем интервале J, удовлетворяющее п
начальным условиям
г/(а) = Ь0, у'(а) = Ьи ..., у(п-х)(а) = Ьп-ь E)
А
3.2. Общие решения линейных уравнений 239
Уравнение B) и условия E) составляют задачу Коши для уравнения n-го порядка. По
теореме 2 любая такая задача имеет единственное решение на всем интервале /
непрерывности коэффициентов уравнения B). Однако теорема 2 не поясняет, как найти это решение.
В разделе 3.3 для достаточно важного в приложениях случая постоянных коэффициентов
мы научимся строить решения задачи Коши (задачи с начальными условиями) в явном виде.
Пример 1
Продолжение
Мы уже знаем, что функция
у(х) = -Зеж + 3 cos 2х - 2 sin 2х
является решением уравнения
г/C)+Зг/" + 4г/ + 12у = 0
на всей действительной оси. Начальные условия для этого частного
решения можно записать в виде г/@) = 0, г/@) = 5 и г/"@) = —39. Согласно
теореме 2, других решений, удовлетворяющих этим условиям, нет.
Заметим, чтЬ график этого решения в правой части рис. 3.2.1 похож на график
периодической функции. В самом деле, у(х) « 3cos2x — 2sin2x для
больших положительных х (из-за отрицательной степени экспоненты).И
Рис. 3.2.1. Частное решение у(х) =
= -Зе_3ж + 3 cos 2x - 2 sin 2x
Замечание. Обще? решение уравнения третьего порядка в примере 1 содержит три
произвольных постоянных ci, C2 и сз. Поэтому уравнение имеет трехпараметрическое
семейство решений, причем каждый параметр может принимать бесконечное множество
значений. В этом семействе можно выделить три семейства решений особенно простого вида:
• у(х) = ciex (получается из общего решения при сг = сз = 0);
• у(х) = С2 cos 2х (получается из общего решения при с\ = сз = 0);
• у(х) = сз sin 2х (получается из общего решения при с\ = С2 = 0).
С другой стороны, по теореме 2 трехпараметричность семейства решений обусловлена
произвольным выбором трех начальных данных в условиях у@) = Ьо,у'@) = bi иг/"@) ==
= Ьг • На рис. 3.2.2-3.2.4 изображены три соответствующих семейства решений (для каждого
из них два начальных значения равны 0). ■
240 Глава 3. Линейные уравнения высших порядков
Рис. 3.2.2. Решения
уравнения г/3> 4- Зг/" 4- 4у' 4- 12г/ =
= 0 при у'@) = г/"@) = 0 для
различных значений г/@)
3
2
1
* 0
-1
-2
1
(Ж* 1
1
1 1 1 1
У@) = 3 I
" . / 1
у'@) = -3
1-1 1
-2 -1
Рис. 3.2.3. Решения
уравнения у& 4- Зг/" 4- 4г/ 4- 12г/ = О
приг/@) = 2/"@) = 0 для
различных значений г/'@)
1
0,8
0,6
0,4
0,2
ъ О
-0,2
-0,4
-0,6
-0,8
-1
-IS
r I
к\
- 1
: I
r,if
i i i i
/40) = 3
i^jp"" "'jr'
/'@) = -3
1 l II
н
]
-1
1 2 3
л;
Рис. 3.2.4. Решения
уравнения у& + 3£/" 4- 4г/ 4- 12г/ =
= 0 при г/@) = г/'@) = 0 для
различных значений г/"@)
Заметим, что по теореме 2 тривиальное решение у(х) = 0 является единственным
решением однородного уравнения
г/(п> + pi(*J/(n~1} + • • • +рп_1(х)г/ +Рп(х)у = О, C)
удовлетворяющим тривиальным начальным условиям
у(а)=у'(а) = --- = у(п-1На) = 0.
Пример 2
Легко проверить, что функции
уг(х)=х2 и у2(х)=х3
представляют собой два решения уравнения
i
х2у" - Аху' 4- 6г/ = 0.
3.2. Общие решения линейных уравнений 241
Кроме того, оба эти решения удовлетворяют начальным условиям
г/@) = у'@) = 0. Почему это не противоречит теореме 2? Причина
состоит в том, что старший коэффициент дифференциального уравнения равен
нулю при х = 0. Поэтому на интервале, содержащем х = 0, уравнение не
может быть записано в форме C) с непрерывными коэффициентами. ■
Линейно независимые решения
На основе рангах знаний об уравнениях второго порядка можно предположить, что общее
решение однородного линейного уравнения п-го порядка
> У{п) +Р1 ^)г/(п_1) + • • • +Pn-i(x)f/+Pn{x)y = 0 C)
является линейной комбинацией
> У = ciyi + с2у2 Ч Ч-спг/п, D)
частных решений уг,у29 • • •, Уп уравнения C). Но эти п частных решений должны быть
"достаточно независимыми", чтобы в равенстве D) q9 с2,..., сп можно было выбрать так,
чтобы полученное при этом решение удовлетворяло произвольным начальным условиям
вида E). В чем же заключается эта независимость трех и более функций?
Напомним, что две функции /i и f2 линейно зависимы, если одна из них является
произведением другой на некоторую постоянную (т. е. если или /i = kf2, или /2 = fe/i для
некоторой постоянной к). Из этого условия, записанного в виде
(l)/l + МО/2 = 0 ИЛИ (fc)/l + М)/2 = 0,
видно, что если /i и /г линейно зависимы, то существуютнекоторые одновременно неравные
нулю постоянные с\ и сг, такие что
ci/i+c2/2 = 0. F)
Наоборот, если такие с^и сг существуют, то из F) очевидным образом следует линейная
зависимость функций /i и /г.
По аналогии с равенством F) п функций /i, /2, ♦.., /п называются линейно зависимыми,
если их некоторая нетривиальная линейная комбинация
Cl/l +C2/2 + "-+Cn/n
тождественно равна нулю. Нетривиальность здесь означает, что не все из коэффициентов
с\9 С2,..., Сп нулевые (хотя некоторые, возможно, равны нулю).
Определение. Линейная зависимость функций
Функции /ь /г,..., /п называются линейно зависимыми на интервале /, если
существуют константы ci, C2,..., сп, не все равные нулю, притом такие что
ci/i+c2/2 + ---+cn/n=0 G)
на /; т. е.
cifi(x) + с2/2(ж) Н -f- cnfn{x) = 0
для всех х из/.
242
Глава 3. Линейные уравнения высших порядков
Очевидно, что в равенстве G) хотя бы один коэффициент может быть отличен от нуля тогда
и только тогда, когда хотя бы одну функцию можно выразить в виде линейной комбинации
других (следовательно, /i, /2,..., fn линейно зависимы лишь в этом случае).
Пример 3
Функции
/i(x) = sin2x, /2(^0 = sin x cos x и /з(#) = ex
линейно зависимы на действительной оси, так как
A)/х + (-2)/2 + @)/3 = О
(по известному тригонометрическому тождеству sin 2х = 2 sin x cos x).
т
Функции /ь /2,..., fn называются линейно независимыми на интервале /, если они
не являются линейно зависимыми на нем, т. е. равенство
ci/i + С2/2 + h cnfn = О
выполняется на / лишь в тривиальном случае
G)
с\ =с2
= сп = 0.
Таким образом, функции линейно независимы на интервале /, если ни одна нетривиальная
линейная комбинация не равна тождественно нулю на /. Другими словами, функции /i,
/2, • > /п линейно независимы, если ни одна из них не является линейной комбинацией
остальных. (Почему?)
Иногда в линейной зависимости п данных функций можно убедиться, построив, как
в примере 3, их нетривиальную комбинацию, которая тождественно равна нулю. Но чтобы
показать, что п заданных функций линейно независимы, необходимо доказать, что не
существует нетривиальной линейной комбинации, тождественно равной нулю. А это может
быть существенно труднее.
> К счастью, в случае, когда данные п функций являются решениями однородного
линейного дифференциального уравнения n-го порядка, для проверки линейной зависимости
можно воспользоваться специальным аппаратом, который во многих случаях позволяет
свести такую проверку к рутинной работе. Таким аппаратом является определитель Вронского,
определение которого для случая п = 2 было дано в разделе 3.1. Предположим, что каждая
из п функций /i, /2,..., fn дифференцируема п — 1 раз. Тогда их определителем Вронского
называется следующий определитель порядка п:
W =
/1
Л
/2
/J
(П_1) (п-1)
fn
fn
An-i)
Jn
(8)
3.2. Общие решения линейных уравнений 243
Мы будем обозначать его W(/i, /2, • • • , fn) или W(x), в зависимости от того, что мы хотим
подчеркнуть — зависимость от функций или от точки х, в которой вычисляется его
значение. Этот определитель назван в честь польского математика Вронского (J. M. H. Wronski,
1778-1853L.
В разделе 3.1 мы убедились, что определитель Вронского двух линейно зависимых
функций тождественно равен нулю. Обобщим это утверждение: определитель Вронского п
линейно зависимых функций Д, /2, ..., fn тождественно равен нулю. Для доказательства
этого предположим, что равенство G) имеет место на интервале I для некоторых значений
си С2,..., Сп, не все из которых равны нулю. Продифференцировав это равенство п — 1 раз,
получим п равенств
Clfl(x)+C2f2(x) Н + Сп/п(х)=0,
cif[(x) + са/£(х) + • • • + СпГп(х) = О,
: (9)
cif[n'l\x) + c2fin-1\x) +... + cnf<r-l\x) = О,
которые выполняются для всех х из /. Из курса линейной алгебры известно, что система
п линейных однородных уравнений с п неизвестными имеет нетривиальное решение тогда
и только тогда, когда определитель матрицы ее коэффициентов равен нулю. Определителем
системы уравнений (9) относительно неизвестных с\9 сг, ..., сп является определитель
Вронского W(fi, /2,... , fn) в точке х интервала /. Так что если не все с% равны нулю, то
W(x) = 0, что и требовалось доказать.
Следовательно, чтобы показать, что функции /ь /2, ..., fn линейно независимы на
интервале J, достаточно показать, что их определитель Вронского не равен нулю хотя бы
в одной точке интервала /.
Пример 4
Покажем, что функции ух (х) = е Зх,у2 (х) = cos 2х и уз (х) = sin 2x (из
примера 1) линейно независимы.
4 Более точно эту фамилию следовало бы писать Вроньский, поскольку именно такое написание в большей
степени соответствует написанию фамилии Wronski на польском языке. Впрочем, настоящая фамилия этого
польского математика и философа-мистика — Хене (Ноепе). Поэтому он также известен как Гене-Вронский.
Юзеф Мария (Jozef Maria) Вронский родился 24 августа 1776 года в Волштыне (Польша). Имел бурную
биографию (служил артиллерийским офицером в армии Костюшко, а впоследствии в штабе А. В. Суворова до
отставки в 1897 году). Публиковал свои работы по математике начиная с 1811 года. Хотя для его работ
характерна чрезвычайная широта и общность постановки задач, система обозначений в них была чрезвычайно
сложной, а склоняющийся к мистицизму стиль затруднял изучение его работ. Поэтому разработкой научного
наследия Вронского занялись многие математики во второй полЬвине XIX века уже после его смерти. Умер
Вронский 9 августа 1853 года в Париже. Функциональный определитель, который теперь изучается во всех
достаточно полных курсах анализа и дифференциальных уравнений, был впервые введен Вронским в 1812 году. —
Примеч. ред.
244 Глава 3. Линейные уравнения высших порядков
Решение Их определитель Вронского
~3х cos 2х
W =
е-0" cos^x sin 2x
Зе~3ж -2sin2x 2cos2x
9е~3х —4cos2x —4sin2x
— „-Зж
+ 9е
-Зх
-2sin2x 2cos2x
-4 cos 2x —4 sin 2x
cos 2x sin 2x
—2sin2x 2cos2x
4-Зе"
-Зж
cos 2x sin 2a;
-4 cos 2x —4 sin 2x
+
= 26еж ^ 0.
Поскольку W Ф 0 всюду на вещественной оси, г/ь У2 и уз линейно
независимы на любом открытом интервале (включая и всю вещественную
ось). ■
Пример 5
Решение
Покажем сначала, что три решения
уг(х) = х, у2(х) = a; In я и у3(х) = х2
уравнения третьего порядка
ж3уC) - х2у" + 2а?у' - 2у = 0
A0)
линейно независимы на открытом интервале х > 0. Затем найдем частное
решение уравнения A0), удовлетворяющее начальным условиям
3,A) = 3, i/(l) = 2, у"A) = 1.
(И)
Заметим, что при х > 0 можно разделить каждое слагаемое в левой
части уравнения A0) на х3. В результате получится однородное уравнение
вида C). Вычислим определитель Вронского трех данных решений:
W =
х х\пх
X"
1 14-In ж 2х
0 I 2
X
— X.
ПосколькуW(x) ф 0 для всех х > 0, у\9 у2 и уз линейно независимы на
интервале х > 0. Чтобы найти требуемое частное решение, подставим
начальные данные A1) в систему
у(х) = С\Х 4- С2#1ПЖ 4-Сз#2,
у'(ж) =£х 4- с2A 4- In ж) 4- 2с3ж,
y"(x) = 0 +J
+ 2с3.
3.2. Общие решения линейных уравнений 245
Получим систему уравнений
2/A) = ci + с3 = 3,
2/A) = а + с2 + 2с3 = 2,
у"A) = с2 + 2с3 = 1.
Ее решения: ci = 1,С2 = — 3,сз = 2. Искомое частное решение:
2/(х) = ж — 3xlnx -f 2х2. ■
Если WB/i, 2/2, • • • j 2/n) 7^ 0, то (по теореме 4) для любых начальных условий E) можно
найти удовлетворяющее им решение
У = ci2/i + С22/2 Н + Сп2/П.
Для линейно независимых решений теорема 3 гарантирует, что W не обращается в нуль.
Теорема 3
Вронскианы решений
Предположим, что у\, г/2,..., уп — это п решений однородного линейного уравнения п-то
порядка
У
(п)
+ Pi(*)v(n~1) + •'' +рп-1 W + Рп(*)</ = 0 C)
на открытом интервале /, где все pi непрерывны. Пусть
W = W(yuy2,... ,yn).
(a) Если 2/ь 2/2, • • •, Уп линейно зависимы, то W = 0 на /.
(b) Если уиУ29---9Уп линейно независимы, то W Ф О в каждой точке /.
Иными словами, возможны лишь два случая: либо W = О всюду на /, либо W ф 0 на всем /.
Доказательство. Пункт (а) мы уже доказали. Чтобы доказать (Ь), предположим, что
W(a) = 0 в некоторой точке/. Достаточно показать, чтотогдарешения 2/1,2/2,- • • ,Уп линейно
зависимы. Но W(a) есть определитель матрицы коэффициентов системы п однородных
линейных уравнений
с\у\{а) + с2у2(а) Н + спуп(а) = О,
ciy[(fl) + с22/2(а) + •'•• + спу'п(а) = О,
ciy{n-1}(a) + с22/^-1}(а) + • • ■ + c^i^V) = О
A2)
относительно п неизвестных с\9 с2,-..., сп. Если бы W(a) = 0, то из известной теоремы
линейной алгебры (той, которую мы уже использовали сразу после (9)), следовало бы, что
система A2) имеет нетривиальное решение. Иными словами, существовало бы нетривиальное
решение с\, с2,..., с™, в котором не все эти числа равны нулю.
246 Глава 3. Линейные уравнения высших порядков
Рассмотрим соответствующее этим числам частное решение
Y(x) = ciyi(x) + с2у2(х) Н + спуп{х) A3)
уравнения C). Из системы уравнений A2) следует, что Y удовлетворяет тривиальным
начальным условиям
У (а) = Y'(a) = • • • = У*"-1^) = 0.
Тогда из единственности решений (теорема 2) следует, что Y(х) = 0 на /. Учитывая A3)
и выбор ci, C2,..., сп (не все равны нулю), получаем противоречие: решения у\, у2, • • •, Уп
линейно зависимы. Это и завершает доказательство теоремы 3. А
Общие решения
Теперь мы уже можем показать, что любое решение однородного уравнения n-го порядка
можно представить как линейную комбинацию п данных линейно независимых решений.
Доказательство следующей теоремы по существу аналогично доказательству теоррмы 4
раздела 3.1 (случай п = 2). Нужно лишь воспользоваться утверждением теоремы 3:
определитель Вронского п линейно независимых решений не равен нулю.
Теорема 4
эродны)
Общие решения однородных уравнений
Пусть 2/i, у2,..., Уп — это п линейно независимых решений однородного
дифференциального уравнения
У
(п)
+ Pl{x)y{n~l) + • • • +Pn-!(xW +Pn(x)y = 0 C)
на открытом интервале 7, где все pi непрерывны. Если Y — произвольное решение
уравнения C), то существуют постоянные с\, С2,..., сп, такие что
Y(x) = ciyi(x) + с2у2(х) Н 4- спуп(х)
для всех х из I. А
Следовательно, любое решение однородного линейного дифференциального уравнения
n-го порядка является линейной комбинацией
> У = С№ + С22/2 Н + Спуп
любых п данных линейно независимых решений. На основе этого мы будем называть такую
линейную комбинацию общим решением дифференциального уравнения.
Пример 6
Рассматривая пример 4, мы установили, что частные решения у\ (х) =
= е~3х9у2(х) = соБ2хиуз(х) = sin2x линейного дифференциального
уравнения у№ Н- Зу" + 4у' Н- 12у = 0 линейно независимы. С другой
стороны, по теореме 2 для любых заданных bo, Ь\ и &2 существует
частное решение у(х), удовлетворяющее условиям у@)' = bo, у'@) — Ь\
3.2. Общие решения линейных уравнений 247
'^>
Ly
Рис. 3.2.5. Вот так оператор L
"действует" на функцию у
и 2/"@) = Ь2. Согласно теореме 4, это частное решение является
линейной комбинацией уь^иуз- Иными словами, существуют числа си с2
и сз, такие что
у(х) = c\e~Zx + с2 cos 2х + сз sin 2х.
Последовательным дифференцированием и подстановкой х ~ О можно
убедиться, что для определения этих коэффициентов (см. приложение
к этому разделу) нужно лишь решить систему трех линейных уравнений
с\ + с2 = &о,
-3ci . + 2сз = Ьь
9ci — 4с2 = Ьг. н
Неоднородные уравнения
Рассмотрим теперь неоднородное линейное дифференциальное уравнение n-го порядка
> Ly = у^ +Pl(x)y(n-V + ... +pn_1(xJ/ + Рп(х)у = /(*). B)
Соответствующее ему однородное уравнение имеет вид
> Ly = г/п> +pi(a:)|/(n-1> +,• • • +pn_i(*)i/ + рп(х)</ = 0. C)
Буквой L обозначим оператор, в результате действия которого на п раз дифференцируемую
функцию у (рис. 3.2.5) получается линейная комбинация
Ly = y<n> + pi(x)y(n~1) + • • • + pn-i(x)i/ +pn(x)y A4)
функции 2/ и ее первых п производных. Принцип суперпозиции (теорема 1) просто означает,
что оператор L линейный; это значит, что
> L(cxyi + с2у2) = ciLyi + c2L?/2 A5)
ДЛЯ ЛЮбыХ ПОСТОЯННЫХ Ci И С2.
248 Глава 3. Линейные уравнения высших порядков
Предположим, что известно некоторое решение ур неоднородного уравнения B) и что
Y — произвольное (другое) решение B). Тогда из равенства A5) следует, что
L(Y - ур) = LY -Lyp = / - / = 0.
Таким образом, ус = Y — ур является решением соответствующего однородного
уравнения C). Тогда
> У = Ус + уР, A6)
и, по теореме 4
> Ус = ciyi 4- с2у2 Н \-спуп, A7)
где 2/1,2/2, • •, Уп — линейно независимые решения соответствующего однородного
уравнения. Назовем ус дополняющей функцией неоднородного уравнения. Таким образом, мы
только что доказали, что общее решение неоднородного уравнения B) можно представить
в виде суммы общего решения ус соответствующего однородного уравнения и какого-либо
частного решения ур неоднородного уравнения B).
Теорема 5
Решения неоднородных уравнении
!^>^11й;**^ч^^^
Пусть ур — частное решение неоднородного линейного дифференциального уравнения B)
на открытом интервале 7, на котором непрерывны функции pi и /. Пусть у\, у2,..., уп —
линейно независимые решения соответствующего однородного уравнения C). Если Y —
некоторое произвольное решение уравнения B) на /, то существуют некоторые числа с\, с2,
.. .,Сп9 такие что
для всех х в I.
Пример 7
Y(x) - С1уг{х) 4- с2у2(х) Н 4- спуп(х) 4- УР(х) A8)
А
Очевидно, что ур = Зх — это частное решение уравнения
у" + 4у=12х A9)
и что ус(х) — ci cos 2x 4- с2 sin 2x решение соответствующего ему
однородного уравнения. Найдем решение уравнения A9), которое
удовлетворяет условиям у @) = 5,2/;@) = 7.
Решение Общее решение уравнения A9) имеет вид
у(х) = с\ cos 2х 4- с2 sin 2х 4- Зх.
Тогда
2/'(х) = — 2с\ sin 2х 4- 2с2 cos 2x 4- 3,
Поэтому из начальных условий следует, что
у@) = ci =5,
у'@) = 2с2 + 3 = 7.
3.2. Общие решения линейных уравнений 249
Отсюда находим с\ = 5 и С2 = 2. Следовательно, искомым решением
является функция
у{х) = 5 cos 2х 4- 2 sin 2x 4- Зх. ■
3.2. Задачи
5 задачах 1-6 непосредственной проверкой покажите, что данные функции линейно зависимы на
действительной оси (найдите тождественно равную нулю нетривиальную линейную комбинацию
данных функций).
1. /(х) = 2х, д{х) = Зх2, h(x) = 5х - 8х2 2. f(x) = 5, д(х) = 2 - Зх2, /i(x) = 10 + 15х2
3. /(х) = 0, д(х) = sinx, h(x) = ех 4. /(х) = 17, #(х) = 2 sin2 x, /i(x) = 3cos2x
5. /(х) = 17, #(х) = cos2 х, /i(x) = cos2x 6. /(х) = ех, #(х) = coshx, /i(x) = sinhx
В задачах 7-12, используя определитель Вронского, докажите линейную независимость данных
функций на указанном интервале.
7. /(х) = 1, д(х) = х, h(x) = х2; на действительной оси
8. /(х) = ех, #(х) = е2х, h(x) = e3x; на действительной оси
9. /(х) = ех, #(х) = cosx, h(x) = sinx; на действительной оси
10. /(х) = ех, д(х) = х-2, /i(x) = х~2 lnx; х > 0
11. /(х) = х, #(х) = хех, /i(x) = x2ex; на действительной оси
12. /(х) = х, #(х) = cos(lnx), h(x) = sin(lnx); x > 0
В задачах 13-20 заданы однородное линейное уравнение третьего порядка и три линейно
независимых его решения. Найдите частное решение, удовлетворяющее заданным начальным условиям.
13. уC) 4- 2у" - у' - 2у = 0; у@) = 1, у'@) = 2, у"@) = 0; уг = ех, у2 = е~х, у3 = ех
14. уC) ^ 6у" + П2/' - 6у = 0; у@) = 0, у'@) = 0, у"@) = 3; уг = ех, у2 = е2х, у3 = е3х
15. уC) - Зу" 4- Зу' - у = 0; у@) = 2, у'@) = 0, у"@) = 0; yi = ех, у2 = хех, у3 = х2ех
16. уC) - 5у" 4- 8»' - 4у = 0; у@) = 1, у'@) = 4, у"@) = 0; У1 = ех, у2 = е2х, у3 = хе2х
17. уC) 4- V = 0; у@) = 3, у'@) = -1, у"@) = 2; yi = 1, у2 = cos3x, у3 = sin3x
18. уC) -Зу" 4-4у' - 2у = 0; у@) = 1, у'@) = 0, у"@) = 0; yi = ех, у2 = ех cosx, уз = ех sinx.
19. х3уC> - ЗхУ 4- бху' - 6у = 0; уA) = 6, у'A) = 14, у"A) = 22; щ = х, у2 = х2, у3 = я3
20. хУ3) 4- 6х2у" 4- 4x2/' - 4у = 0; уA) = 1, у'A) = 5, у"A) = -11; yi = х, уз = х,
уз = х-2 lnx
В задачах 21-24 заданы неоднородное дифференциальное уравнение, его частное решение ур и
общее решение соответствующего однородного уравнения ус. Найдите решение, удовлетворяющее
заданным начальным условиям.
21. у" 4- у = Зх; у@) = 2, у'@) = -2; 22. у" - 4у = 12; у@) = 0, у'@) = 10;
ус = с\ cosx 4- с2 sinx; ур = Зх ус = cie2x 4- с2е~2х; ур = —3
23. у" - 2у'- Зу = 6; у@) = 3, у'@) = 11; 24. у" - 2у' 4- 2у = 2х; у@) = 4, у'@) = 8;
ус = cie~x 4- с2е3х; ур = —2 ус = ciex cos x + с2ех sin х; ур = х + 1
25. Пусть Ly = у" 4- ру' 4- ду. Предположим, что у\ и у2 такие функции, что
Ly\ = f(x) и Ly2 = #(х).
Покажите, что их сумма у = yi 4- у2 — решение неоднородного уравнения Ly — /(x) 4- #(#).
250 Глава 3. Линейные уравнения высших порядков
26. (а) Найдите частные решения неоднородных уравнений
у" + 2у = 4 и у" + 2у = 6х.
(Ь) Используя результат задачи 25, найдите частное решение дифференциального уравнения
у" 4- 2у = 6ж 4- 4.
27. Докажите, что функции
/i(x) = l, /2(ж) = ж, и /3(ж) = а:2
линейно независимы на всей действительной оси. (Указание. Предположите, что а + С2Х +
+ сзх2 = 0. Затем продифференцируйте это равенство дважды. Вы получите три равенства,
которые должны выполняться для всех действительных х, включая и значение х = 0. Выведите
ИЗ ЭТОГО, ЧТО С\ = С2 = Сз = 0.)
28. Обобщив метод задачи 27, докажите, что функции
/о(я) = 1, fi(x)=x, f2(x) = ж2,..., fn(x) = xn
линейно независимы на всей действительной оси.
29. Используя результат задачи 28 и определение линейной независимости, докажите, что для
i любой постоянной г функции
/o(*) = erx, h(x) = хегх,..., /„(*) = хпегх
v
линейно независимы на всей действительной оси.
30. Проверьте, что функции у\ = х и уъ = х2 линейно независимы на всей действительной оси
и являются на ней решениями дифференциального уравнения
х2у" - 2ху 4- 2у = 0.
Однако их определитель Вронского W(x, ж2) равен нулю при х = 0. Почему это обстоятельство
не противоречит части (Ь) теоремы 3?
31. В этой задаче выясняется, почему на решение дифференциального уравнения п-го порядка
можно наложить только п начальных условий, (а) Дано уравнение
У 4- ру 4- qy = 0.
Объясните, почему значение у" {а) полностью определяется значениями у (а) и у'(а). (Ь)
Докажите, что уравнение
у" - 2у - Ъу = 0
имеет решение, удовлетворяющее условиям
2/@) = 1, »'(в) = 0, и у"@) = С
тогда и только тогда, когда С — 5.
32. Докажите, что однородное линейное дифференциальное уравнение п-го порядка,
удовлетворяющее условиям теоремы 2, имеет п линейно независимых решений у±, у2,..., уп- (Указание.
Обозначьте через yi то единственное решение уравнения, которое удовлетворяет условиям
y[i-1\a) = l и tfc(fc)(<0 = 0 приА;^г-1.)
3.2. Общие решения линейных уравнений 251
33. Предположим, что все три числа п, г2 и гз различны. Покажите, что в этом случае три функции
exp(rix), ехр(ггх) и ехр(гзж) линейно независимы. Для этого покажите, что их определитель
Вронского
W = exp([ri + 7*2 + гз]х)
не равен нулю для всех х.
34. Как известно, определитель Вандермонда
7*1 Г2 Гз
2 2 2
г{ Г% Г3
V =
1
П
Г2
rx r2 ••• rn
не равен нулю для любых попарно неравных ri,r2,... ,гп. Используя этот факт и метод,
указанный в задаче 33, покажите, что функции
/г(х) = ехр(ГгЖ), 1 ^ I ^ П
линейно независимы.
35. Согласно задаче 32 раздела 3.1, определитель Вронского И^(уi, 2/2) двух решений
дифференциального уравнения второго порядка
у" +pi{x)y +P2(x)y = О
выражается по формуле Абеля
W(x) = Кехр I — pi(x)dx J
для некоторой постоянной К. Можно доказать, что определитель Вронского п решений 2/1,2/2,
..., уп дифференциального уравцения n-го порядка
у(п) +Pi(xJ/(n_1) + • • •+pn-i(x)y' + pn(x)y = О
удовлетворяет аналогичному равенству. Для случая п = 3 покажите это следующим образом.
(а) Производная функционального определителя равна сумме функциональных определителей,
каждый из которых получается из исходного определителя дифференцированием одной строки.
Выведите из этого, что
W' =
2/1 2/2
2/i 2/2
2/3
2/3
у[3) yi3) yi3)
(b) Подставьте 2/i j 2/г и Уз из уравнения
2/C) + Р\у" + Р2У 4- рзу = О,
и затем покажите, что Wf = —piW. Формула Абеля теперь получается интегрированием.
252 Глава 3. Линейные уравнения высших порядков
36. Предположим, что одно из решений у\ (х) однородного линейного уравнения второго порядка
у" + р{х)у + q(x)y = 0 B0)
известно на интервале 7, причем функции р и q на нем непрерывны. Метод понижения
порядка уравнения заключается в том, что в уравнение B0) сначала необходимо подставить
2/2 (х) = v(x)yi(x). Затем надо попытаться найти функцию v(x), такую что функция у2 (х)
представляет собой еще одно (притом линейно независимое) решение данного уравнения.
После подстановки у = v(x)y\(x) в уравнение B0) учтите, что функция у\{х) является решением,
после чего у вас получится уравнение
2/i v" + Bу[ + pyi)v = 0. B1)
Если функция 2/i (х) известна, то уравнение B1) представляет собой уравнение с
разделяющимися переменными относительно производной v'(x) функции v(x). Интегрированием v'(x)
находится требуемая (отличная от постоянной) функция v(x).
37. Чтобы воспользоваться уравнением B1) для решения однородного линейного уравнения
второго порядка (одно решение у\{х) которого известно), необходимо сначала записать данное
уравнение в виде B0) со старшим коэффициентом 1. Это позволит правильно определить
коэффициент (функцию) р(х). Однако часто удобнее просто подставить у = v(x)yi(x) в данное
дифференциальное уравнение и затем найти v(x) в явном виде. Поэтому, поверив, что функция
2/i (х) = х3 является решением уравнения
х2у" — Ъху + 92/ = 0 (х > 0),
подставьте у = vx3 и получите уравнение xv" + v' = 0. Его решением будет v(x) = С In ж.
Подставив С = 1, получите второе решение 2/2 (х) = х31пх этого уравнения.
В задачах 38-45 заданы дифференциальное уравнение и одно его решение у\. Используя метод
понижения порядка аналогично тому, как это было сделано в задаче 37, найдите второе линейно
независимое решение 2/2-
38. х2у" + ху' - 92/ = 0 (х > 0); уг(х) = х3
39. 42/" - 42/ + у = 0; уг(х) = ех/2
40. х2у" - х{х + 2J/' + (х + 2J/ = 0 (х > 0); уг(х) = х
41. (х + 1J/" - (х + 2J/' + у = 0 (я > -1); 2/i(x) = ех
42. A - х2)у" + 2^2/ - 22/ = 0 (-1 < х < 1); yij» = х
43. Сначала поверьте, что функция yi(x) = ж является решением уравнения Лежандра первого
порядка
A - х2)у" - 2x2/' + 22/ = 0.
Затем используйте метод понижения порядка и получите второе решение
уч{х) = 1 - - Ь (при -1 < х < 1).
А 1-Х
44. Сначала подстановкой проверьте, что функция yi(x) = х~г^2 cos x является одним из решений
(при х > 0) уравнения Бесселя порядка |,
2 //,/,/ 2 1 \ rv
х у +ху + (х - ^J/ = 0.
Затем с помощью понижения порядка получите второе решение у2(х) = х~г^2 sinx.
3.2. Общие решения линейных уравнений 253
3.2. Приложение. Построение семейств решений
уравнений третьего порядка
В этом приложении будет идти речь о построении семейств решений уравнений на
компьютере (таких как например рис. 3.2.2-3.2.4). В примере 6 было показано, что рбщее решение
уравнения
г/C)+Зу" + 4г/ + 12г/ = 0 A)
можно представить в виде
у(х) = с\е~Ъх -f C2 cos 2х -f сз sin 2х. B)
Используя метод примера 6 для рис. 3.2.2, покажите, что частное решение уравнения A),
удовлетворяющее начальным условиям у@) = а, г/@) = Оиг/"@) = 0, имеет вид
у(х) = ^- Dе~3х + 9 cos 2х + 6 sin 2х) . ч C)
Рис. 3.2.2 был построен с помощью следующего цикла на входном языке системы Matlab;
х = -1.5 : 0.02 : 5 % x-vector from x = -1.5 to x = 5
for a = -3 : 1 : 3 % for а = -3 to 3 with da = 1 do
cl = 4*a/13;
c2 = -9*a/13;
c3 = 6*a/13;
у = cl*exp(-3*x) + c2*cosB*x) + c3*sinB*x);
plot(x,y)
end
Взгляните на рис. 3.2.3 и покажите, что частное решение уравнения A), удовлетворяющее
начальным данным у@) = 09у'@) = Ьиу"@) = 0, задается уравнением
у(х) = -sin2x, D)
Перепишите предшествующий цикл для этого случая.
Взгляните на рис. 3.2.3 и покажите, что частное решение уравнения A), удовлетворяющее
начальным данным у@) = 0,г/@) = 0иу"@) = с, можно записать в виде
у(х) = ^ Bеж - 2 cos 2х + 3 sin 2x). E)
26
Графические калькуляторы и системы компьютерной алгебры (такие какМар1еиМшке-
maticd) можно использовать для выполнения указанных выше циклов. Сначала попытайтесь
с их помощью получить рис. 3.2.2-3.2.4. Затем постройте аналогичные графики семейств
решений уравнений в задачах 13-20.
254 Глава 3. Линейные уравнения высших порядков
3.3. Однородные уравнения с постоянными
коэффициентами
В разделе 3.2 было показано, что общее решение однородного линейного уравнения п-го
порядка является линейной комбинацией п линейно независимых частных решений.
Однако о методах поиска решений было сказано мало. Для нахождения решения линейного
дифференциального уравнения с переменными коэффициентами в общем случае
необходимо применить численные методы (глава 2) или использовать разложение в бесконечный ряд
(глава 8). Но в случае линейного дифференциального уравнения n-го порядка с постоянными
коэффициентами можно в явном виде найти требуемые п линейно независимых решений.
В общем случае такое уравнение имеет вид
> сьуЫ + On-iV1"-1) + • • • + а2у" + ац/' + а0у = О, / A)
где коэффициенты ао, а\9 а2, ..., ап — вещественные постоянные, причем ап Ф 0.
Характеристическое уравнение
Для начала попробуем найти одно решение уравнения A). Заметим, что
J^(e-) = rV, B)
т. е. любай производная функции егх представима в виде произведения егх на константу.
Поэтому, подставив у = егх в уравнение A), увидим, что все слагаемые являются
произведениями егх на некоторые постоянные, зависящие от г и коэффициентов а* .Поэтому можно
попытаться найти такое значение г, при котором сумма коэффициентов при егх обратится
в нуль. В этом случае функция у = егх будет решением уравнения A).
Например, в разделе 3.1 подстановкой у = егх в уравнение второго порядка
ау" + Ьу' + су = 0
мы получили характеристическое уравнение
ar2 -f br + с — 0,
корнем которого должно быть искомое значение г.
Чтобы обобщить этот метод, подставим у = егх в уравнение A). Из равенства B)
получим, что
anrnerx + On-u^-V* + • • • + a2r2erx + аггегх + а0егх = 0;
иными словами,
erx (anrn + an-ir71 + - • • + а2г2 + агг + а0) = 0.
Поскольку функция егх нигде не равна нулю, у — егх будет решением уравнения A) тогда
и только тогда, когда г является корнем уравнения
> апгп + ап_1Гп_1 + • • • + а2г2 + агг + а0 = 0. C)
3.3. Однородные уравнения с постоянными коэффициентами 255
Это уравнение называется характеристическим уравнением или вспомогательным
уравнением дифференциального уравнения A). Таким образом, мы свели задачу решения
дифференциального уравнения к решению обычного алгебраического.
Согласно основной теореме алгебры комплексных чисел многочлен п-и степени (такой
как в уравнении C)) имеет ровно п корней, вообще говоря не обязательно разных и не
обязательно действительных. Нахождение точных значений этих корней часто является
достаточно сложной задачей; иногда точные значения корней найти не удается. Для
уравнений второго порядка достаточно использовать формулу корней квадратного уравнения,
но для уравнений более высоких порядков может потребоваться либо угадать разложение
многочлена на множители, либо применить численные методы, такие как, например, метод
Ньютона (или команда solve для калькулятора или компьютера).
Случай различных действительных корней
Будем считать, что каким-либо методом мы нашли корни характеристического уравнения.
Тогда, оказывается, можно написать общее решение дифференциального уравнения в явном
виде. В случае комплексных или кратных корней уравнения C) ситуация немного сложнее,
поэтому начнем с самого простого случая. Пусть все п корней характеристического
уравнения гь Г2,..., гп различны и действительны. Тогда функции
все являются решениями уравнения A) и, кроме того, (см. задачу 34 из раздела 3.2), все эти
п решений линейно независимы на всей действительной оси. Таким образом, мы доказали
теорему!.
Теорема 1
Случай различных действительных корней
Пусть корни п, Г2,..., гп характеристического уравнения C) действительны и различны.
Тогда общее решение уравнения A) имеет вид
у(х) = сгеГ1Х +- с2еГ2Х + • • • + Спег
D)
Пример 1
Найдите решение задачи Коши (задачи с начальными условиями)
у(з) + Зу" - 10у' = 0;
у@) = 7, 1/@) = 0, 2/"@) = 70.
Решение Характеристическое уравнение данного дифференциального уравнения
имеет вид
г3 + Зг2 - Юг = 0.
Разложим левую часть на множители. Получим
г(г2 + Зг - 10) = г(г + 5) (г - 2) = 0.
256 Глава 3. Линейные уравнения высших порядков
Отсюда видно, что характеристическое уравнение имеет различные
действительные корни г = 0, г = -5 и г = 2. Так как е° = 1, согласно
теореме 1 общее решение данного уравнения имеет вид
у(х) = ci + с2е~5х + с3е2х.
Подстановкой начальных условий получим систему уравнений
у@) = ci + с2+ с3= 7,
1/@)= - 5с2 + 2с3= 0,
у"@) = 25с2 + 4с3 = 70
относительно коэффициентов с\, с2 и сз. Из двух последних уравнений
следует, что у;/@) — 2г/@) = 35с2 = 70, т.е. с2 = 2. Тогда из
второго уравнения получим сз = 5. Наконец, из первого уравнения получим
с\ = 0. Таким образом, искомое частное решение уравнения:
у{х) = 2е~Ьх + Ье2х. Ш
Многочлен от оператора
Если не все корни характеристического уравнения C) различны (т. е. кратность некоторых
корней больше 1), то одной лишь теоремы 1 недостаточно для получения п линейно
независимых решений уравнения A). Например, если корни равны 1, 2, 2 и 2, то с помощью
теоремы 1 можно получить лишь две функции: ех и е2х. Таким образом, задача состоит
в том, чтобы построить недостающие линейно независимые решения. Для этой цели удобно
использовать операторную нотацию, введенную в конце раздела 3.2. Уравнение (I)
соответствует операторному уравнению Ly = 0, где L — оператор
dn d71-1 d2 d
L = a^+a"-1d^ + '-, + a2^+ai^+ao- E)
Обозначим через D = d/dx операцию дифференцирования по переменной х, т. е.
£>!/ = !/', D2y = y", D3y = yW,
и т. д. С помощью символа D оператор L, определенный равенством E), можно записать
в виде
L = anDn + an^D71-1 + • • • + a2D2 + aiD + a0. F)
Правую часть равенства F) удобно рассматривать как (формальный) многочлен степени п
относительно "переменной" D. Полученное выражение называется полиномом
(многочленом) от оператора5.
Полином первой степени от оператора имеет вид D — а, где а — действительное число.
Действуя им на функцию у = у(х), получим
(D - а)у = Dy-ay = y'- ay.
5 Точнее, значением полинома (многочлена) от оператора. Это значение является, конечно, оператором. —
Примеч. ред.
3.3. Однородные уравнения с постоянными коэффициентами 257
Важно отметить коммутативность таких операторов. Иными словами, любые два таких
оператора коммутируют, т. е.
(D - a)(D - Ь)у = (D- b)(D - а)у G).
для любой дважды дифференцируемой функции у = у(х). Формулу G) доказывают
следующие вычисления:
(D - a)(D - Ь)у =(D- а){у' - by) =
= D(y' - by) - а{у' - by) =
= у" - (b + a)yf + aby = у" - (a + b)y' + bay =
= D(yf - ay) - b(yf - ay) =
= (D- b)(y' - ay) = (D- b)(D - a)y.
Случай кратных корней
Пусть теперь характеристическое уравнение
anrn + an_irn_1 + • • • + a2r2 + air + a0 = 0 C)
имеет кратные корни. Предположим, например, что уравнение C) имеет только два разных
корня: го кратности 1 и гi кратности к > 1. Тогда (если разделить на ап) уравнение C) мокно
переписать так:
(г - п)к(г - г0) = (г - r0)(r - гг)к = 0. (8)
В этом случае соответствующий оператор L, заданный равенством F), можно представить
в виде
L = (D- ri)k(D - r0) = (D- r0)(D - n)fc, (9)
причем в соответствии с формулой G) порядок множителей значения не имеет.
Двумя решениями дифференциального уравнения Ly = 0, несомненно, будут функции
у0 = ег°х и 2/i = еГ1Х. Однако для построения общего решения этого недостаточно,
поскольку необходимо найти к -f 1 линейно независимых решений (так как наше уравнение
имеет порядок к + 1). Чтобы найти нужные нам еще к — 1 решений, заметим, что
Ly = (D-r0)[(D-r1)ky] = 0.
Следовательно, каждое решение уравнения fc-ro порядка
(D-ri)ky = 0 A0)
будет также решением исходного уравнения Ly = 0. Таким образом, нам достаточно найти
общее решение уравнения A0).
Учитывая, что у\ = еГ1Х является решением уравнения A0), попробуем найти решение
в виде
у(х) = и(х)уг(х) = и(х)еГ1Х, (И)
258 Глава 3. Линейные уравнения высших порядков
где функция и{х) является искомой. Заметим, что
(D - n) [uer'x] = (Du)er'x + u(neriX) - n(ueriX) = (Du)eriX. A2)
Применив это рассуждение к раз, получим, что
(D - гг)к [иеГ1Х] = (Dku)erix A3)
для любой достаточное количество раз дифференцируемой функции и(х). Отсюда следует,
что функция у = ueVlX является решением уравнения A0) тогда и только тогда, когда Dku =
= и^ = 0. Но это равносильно тому, что и(х) является многочленом степени не выше
к - 1:
и(х) = с\ + с2х + сзх2 Н h СкХк~г.
Таким образом, искомым решением уравнения A0) является функция
у(х) = иеГ1Х = (ci + с2х + с3х2 + • • • + Cfci^^e'18.
В частности, в качестве (недостаюпщх) линейно независимых решений исходного
дифференциального уравнения Ly = 0 можно выбрать функции xeriX, x2eriX,..., xk~1eriX.
Предыдущие вычисления, которые мы выполнили для оператора D — r\, можно провести^
для произвольного многочлена от оператора. Значит, мы доказали следующую теорему.
Если характеристическое уравнение C) имеет кратный корень г кратности fc, то та часть
общего решения дифференциального уравнения A), которая соответствует корню г, имеет
вид
> (ci + с2х + с3х2 + •. • + ъх^е™. A4)
А
Заметим, что, согласно задаче 29 из раздела 3.2, к функций егх, хегх, х2егх ... хк~1егх,
задействованных в формуле A4), линейно независимы на действительной оси. Поэтому
корню кратности к соответствуют А: линейно независимых решения дифференциального
уравнения.
Найдите общее решение дифференциального уравнения пятого порядка
92/E)_б2/D)+2/C)=0
Характеристическим уравнением в данном случае будет
9г5 - 6г4 + г3 = г3(9г2 - 6г + 1) = г3Cг - IJ = 0.
Его корни: г = 0 кратности три и г = | кратности два. Корень г = 0 дает
первую часть
cie°'x + с2хе0х + сзх2е°'х = ci + с2ж + с3х2
общего решения, а корень г = | — вторую: С4вх/3 4- съхех^. Поэтому
общим решением данного дифференциального уравнения будет
у{х) = а+ с2х + с3х2 + с4еж/3 -f с5хех/3. ■
Решение
3.3. Однородные уравнения с постоянными коэффициентами 259
Комплекснозначные функции и формула Эйлера
Поскольку мы предполагаем, что все коэффициенты нашего дифференциального
уравнения (и соответственно характеристического уравнения) действительны, любое комплексное
(не действительное) число является корнем вместе со своим сопряженным (т. е. эти корни
имеют вид а±Ы9 где аиЬ действительны, а г = \/—1). Поэтому возникает вопрос: что может
означать экспонента вида ехр([а 4- Ы]хI
Чтобы ответить на этот вопрос, напомним разложение экспоненты в ряд Тейлора
~Г *2 ;3 t4
^п!
л! 2! 3! 4!
71=0
Если мы подставим t = гх в этот ряд и используем тот факт, что г2 = —1, г3 = —г, г4 = 1,
и т. д., то получим
71=0
х2 гхъ х4 гх5
= 1+г*-2!-1гг + ¥ + -5Г---- =
/ X2 X4 Л .( X3 X5 \
Поскольку два ряда в последней строке являются разложениями в ряд Тейлора функций
cos x и sin х соответственно, получим, что
> егх = cosx-\-isinx. A5)
Это утверждение известно как формула Эйлера. Поэтому мы определим экспоненту ez для
произвольного комплексного числа z = x 4- гу как
ez = ex+iy = exeiy = ех (cos y + • gin yy A6)
Поэтому мы можем утверждать, что комплексный корень характеристического
уравнения соответствует комплекснозначному решению дифференциального уравнения. Ком-
плекснозначная функция F действительной переменной х ставит в соответствие любому
действительному числу х из своей области определения комплексное число
F(x) = f(x) + ig(x). A7)
Вещественнозначные функции / и g называются действительной и мнимой частями
функции F соответственно. Если они обе дифференцируемы, производную F' функции F можно
определить как
F'(x) = f'(x) + ig'(x). A8)
Таким образом, чтобы найти производную комплекснозначной функции F, нужно
продифференцировать действительную и мнимую части F по отдельности.
Будем говорить, что комплекснозначная функция F(x) удовлетворяет однородному
линейному дифференциальному уравнению L[F(x)] = 0, если и действительная, и мнимая
260 Глава 3. Линейные уравнения высших порядков
части функции A7) по отдельности удовлетворяют данному уравнению, т. е. если L[F(x)] =
= L[f(x)] + iL[g(x)] = Q.
Особый интерес представляют комплекснозначные функции вида F(x) = erx, где
г = а±Ы. Заметим, что согласно формуле Эйлера
е(а+Ы)х = eaxeibx = eax^os Ы + • ^ ^ A9а)
е(а-Ы)х = еахе-гЪх = eax^Qsbx _ isinfa.)e A%)
Самым важным для нас свойством функции егх является то, что
Dx(erx) = r.erx, B0)
если г — комплексное число. Доказательство этого факта получается в результате простых
вычислений, в которых учитываются приведенные ранее определения и формулы:
Q
Dx(erx) = Dx(eax cosbx) + iDx(eax sinbx) =
= (aeax cos bx - beax sin bx) + г (aeax sin bx + beax cos bx) =
= (a 4- bi)(eax cos 6x -f iearE sin 6x) = rerrE.
Случай комплексных корней
Из формулы B0) следует, что если г комплексное (в частности, оно может быть и
действительным), то егх будет решением дифференциального уравнения A) тогда и только тогда,
когда это число г является корнем характеристического уравнения данного
дифференциального уравнения. Если в паре сопряженных корней r\ = a + Ыиг2 = а — Ы кратность
каждого корня равна 1 (иными словами,эти корни простые), то соответствующая этой паре
часть общего решения уравнения A) имеет вид
у(х) = derix + С2еГ2Х = Сге(а+Ы)х + С2е{а~ы)х =
= C\eax(cos bx + г sin bx) + C2eax(cos bx — г sin bx);
y(x) = (Ci + C2)eax cos bx + i(d - C2)eax sin bx,
где произвольные постоянные С\ и С2 могут быть комплексными. Например, выбрав С\ =
= С2 = \, получим действительнозначное решение у\ (х) = еах cos bx, а выбрав С\ = — |г,
С2 = |г, получим линейно независимое с ним действительнозначное решение у2(х) =
= еах sin bx. Отсюда следует важная теорема.
Теорема 3
Случай комплексных корней
Если сопряженные комплексные числа а ± Ы (при 6^0) являются простыми корнями
характеристического уравнения C), то соответствующая им часть общего решения уравнения A)
имеет вид
> еах(a cos bx -f c2 sin bx).1 B1)
3.3. Однородные уравнения с постоянными коэффициентами 261
Пример 3
Характеристическое уравнение дифференциального уравнения
у" + Ъ2у = 0 (Ь>0)
имеет вид г2 4- Ъ2 = 0. Его корни г = ±Ы. Тогда по теореме 3 (при а = 0)
его общее решение можно записать так:
у(х) == С\ cos bx 4- С2 sin bx. Ш
Пример 4
Найдем частное решение уравнения
у" - V + Ъу = 0, ,
удовлетворяющее условиям у@) = lny^O) = 5.
Решение Характеристическое уравнение имеет вид
г2 - 4г 4- 5 = (г - 2J 4-1 = 0.
Его корнями являются числа 2 4- г и 2 — г. Учитывая это, общее решение
можем записать в виде
у(х) = е2х(с\ cosx 4- C2sinx).
Отсюда
у' (х) = 2е2х (ci cos х + С2 sin x) + е2х{—с\ sin х 4- сг cos ж),
поэтому из начальных условий следует, что
l/@) = ci = l и 2/,@) = 2ci4-c2 = 5.
Из этой системы уравнений находим с2 = 3. Требуемое частное решение
имеет вид
у[х) = е (cos ж 4- 3sinx).
Пример 5
Найдем общее решение уравнения у^ -f 4г/ = 0.
Решение Сначала запишем характеристическое уравнение:
г44-4=(г24-2г)(г2-2г) = 0.
Вот его четыре его корня: ±y/±2i. Таккакг = ег7Г/2,а—г = е3г7Г/25
имеем:
262 Глава 3. Линейные уравнения высших порядков
у/Ц = (е3-/2I/2 = е3-/4 = =±±±.
Поэтому четыре (простых) корня характеристического уравнения
г = ±A ± г). Эти две пары комплексных сопряженных корней 1 ± г
и — 1 ± г дают общее решение
у(х) = ех {с\ cos х + С2 sin х) + е~х (сз cos x + C4 sin x)
дифференциального уравнения у^ 4- 4t/ = 0. ■
В примере 5 мы представили комплексное число в экспоненциальной форме (т. е. с
модулем и аргументом, которые в полярных координатах называются соответственно радиусом-
вектором и полярным углом):
х 4- гу = re
гв
B2)
Связи между действительной частью х, мнимой частью у, модулем числа г и аргументом
в изображены на рис. 3.3.1. Одним из следствий формулы B2) является то, что ненулевое
комплексное число х + iy имеет два различных квадратных корня
{x + iyf'2 = {rei0I'2 = ±T1'2eie'\
B3)
Рис. 3.3.1. Модуль и аргумент
комплексного числа х -\-гу
Случай кратных комплексных корней
Теорема 2 имеет местр также для случая комплексных корней. Если кратность
сопряженных комплексных корней а ± Ы равна к, то соответствующая им часть общего решения
дифференциального уравнения имеет вид
(Ах + А2х + • • - + Акхк-г)е<а+ы)х + (Вг + В2х + - • • + Bkxk-1)e^a-bi^x =
k-i
У^ xpeax(ci cos bx + di sin bx).
p=0
B4)
3.3. Однородные уравнения с постоянными коэффициентами 263
Можно показать, что 2fc функций
хреах cos Ъх, xpeax sin fcr, O^PUk-l
из формулы B4) линейно независимы.
Пример б
Найдем общее решение уравнения (D2 4- 6D + 13Jу = 0.
Решение Вьщелив полный квадрат, находим, что характеристическое уравнение
(г2 + бг + 13J = [(г + аJ + 4]2 = 0
имеет пару сопряженных комплексных корней —3 ± 2г кратности fc = 2.
Отсюда по формуле B4) получим общее решение
у(х) = е~3х (ci cos 2x -f di sin 2ж) + хе~3х (с2 cos 2x 4- ^2 sin 2x). ■
В приложениях редко встречается ситуация, когдаразложение характеристического
уравнения на множители найти так же просто, как и в примере 6. Часто наибольшие
затруднения при решении однородного дифференциального уравнения вызывает поиск корней его
характеристического уравнения. Иногда корень многочлена можно найти перебором.
Соответствующий подход проиллюстрирован в примере 7. В конце этого раздела приведены
также и другие методы.
Пример 7
Характеристическим уравнением дифференциального уравнения
у<3>+|/-10у = 0
является кубическое уравнение
г3 4- г - 10 = 0.
По общеизвестной теореме элементарной алгебры, рациональными
корнями этого уравнения могут быть лишь делители целого числа 10, т. е.
числа ±1, ±2, ±5 и ±10. Методом подбора (или методом перебора)
находим, что 2 является корнем характеристического уравнения. Из теоремы
элементарной алгебры о разложении многочлена на множители следует,
что г3 4- т — 10 делится на г — 2. Выполнив деление, находим частное
г2 4- 2г 4- 5 = (г 4-1J 4- 4.
Его корнями являются сопряженные комплексные числа — 1 ± 2г. Зная
все три корня характеристического уравнения, строим общее решение
дифференциального уравнения в виде
у(х) = с\е2х 4- e~x(c2COs2x4-c3sin2x). ■
264 Глава 3. Линейные уравнения высших порядков
Пример 8
Пусть корни характеристического уравнения некоторого
дифференциального уравнения равны 3, —5,0,0, 0,0, —5, 2 ± Зг и 2 ± Зг. Напишите
общее решение этого дифференциального уравнения.
Решение Общее решение записывается непосредственно по набору корней
характеристического уравнения. Оно имеет вид
У(я)
с\ 4- с2х + с3х2 4- с4х3 4- с5е3ж + с6е Ъх 4- с7хе Ъх
4- e2x(cs cos Зх 4- eg sin Зх) 4- хе2х(сю cos Зх 4- сц sin Зх)
3.3.^a^a4HL
5 задачах 1-20 найдите общие решения дифференциальных уравнений.
2. 22/" - 32/' = О
4. 22/" - 72/' + 32/ = О
6. 2/" + 52/' + 52/ = О
8. у" - 62/ + 132/ = О
10. 52/D) + 32/C) = 0
12. 2/D) - Зу<3> 4- 32/" - у' = 0
14. 2/D) + 32/" - 4у = 0
16. 2/D) 4-182/" 4- 81у = 0
18. 2/D) = 162/
1. 2/" - 42/ = 0
3. 2/" + 32/' -Ю2/ = 0
5. у" + 62/ + 92/ = 0
7. 42/" - 122/ + 92/ = 0
9. у" + 82/' 4- 252/ = 0
11. 2/D) - 82/C) 4- 162/" = 0
13. 92/C) 4- 122/" + 42/' = 0
15. 2/D) - 82/" 4- 162/ = 0
17. 62/D) + ll2/" + 42/ = 0
19. уC)+у"-у'_у = 0
20. уD) 4- 2уC) 4- Зу" + 2у' + у = 0 (Указание: раскройте скобки в вьфажении (г2 4- г 4-1J).
5 задачах 21-26 найдите решения данных задач Коши.
21. у" - 42/' + Зу = 0; 2/@) = 7,2/'@) = 11 22. 92/" + 62/' + 42/ = 0; 2/@) = 3,2/'@) = 4
23. 2/" - 62/' + 252/ = 0; 2/@) = 3,2/'@) = 1
24. 22/C) - 32/" - 22/' = 0; 2/@) = 1,2/'@) = -1, у"@) = 3
25. 32/C) + 22/" = 0; у@) = -1, у'@) = 0, у"@) = 1
26. у& + 10у" + 252/' = 0; 2/@) = 3, у'@) = 4,2/"@) = 5
В задачах 27-32 найдите общие решения данных дифференциальных уравнений. Для этого сначала
угадайте один из корней характеристического уравнения, а затем найдите остальные
разложением на множители.
27. 2/C) 4- 32/" - 42/ = 0
29. 2/C) + 272/ = 0
31. 2/C) + 32/" + 42/' - 82/ = 0
28. 22/C) - 2/" - 52/' - 2у =
30. 2/4>-2/C)+2/"-32/'
= 0
62/
0
32. 2/D) + 2/C) - Зу" - 5у' - 2у = 0
В задачах 33-36 дано одно решение дифференциального уравнения. Найдите общее решение.
33. уC) 4- Зу" - 54у = 0; у = е3х 34. ЗуC) - 2у" + 12у' - 8у = 0; у = е2ж/3
35. буD) 4- 5уC) + 25у" 4- 20у' + 4у = 0; у = cos 2x
3.3. Однородные уравнения с постоянными коэффициентами 265
36. 9</C) + lit/" + V - Uy = 0; у = е~х sinx
37. Найдите функцию у(х) такую, что у^\х) — у^3\х) для всех х и 2/@) = 18, у'@) = 12,
у"@) = 13иуМ@) = 7.
38. Найдите решение задачи Коши (задачи с начальными условиями)
у(з) _ Ъу» + Шу> _ 5002/ = 0;
* 2/@) = 0, i/@) = Ю, 2/"@) = 250,
если известно, что функция у\ (х) = еЪх является частным решением данного
дифференциального уравнения.
В задачах 39-42 найдите линейное однородное дифференциальное уравнение с постоянными
коэффициентами по данному его общему решению.
39. у(х) = (А + Вх + Сх2)е2х 40. у(х) = Ае2х + В cos 2x + С sin 2x
41. 2/(ж) = -A cos 2а: + i? sin 2x + С cosh 2a: + D sinh 2a:
42. 2/(z) = (A + Bx + Cx2) cos 2ж + (D + Еж + Fa:2) sin 2a:
Задачи 43-47 посвящены решению дифференциальных уравнений с комплексными коэффициентами.
43. (а) Используя формулу Эйлера, покажите, что любое комплексное число может быть записано
в виде гег99 где г ^ 0 и —7г < в ^ 7г. (Ь) Представьте числа 4, —2, Зг, 1 + г и — 1 + гу/3 в виде
гегв. (с) Комплексные числа ±егв^2у/г являются квадратными корнями из комплексного числа »
гегв. Извлеките квадратные корни из чисел 2 — 2г\/3 и — 2 + 2г\/3.
44. Используя формулу корней квадратного уравнения, решите следующие уравнения. Обратите
внимание, что корни не являются комплексно сопряженными.
(а) х2 + гх + 2 = 0 (Ь) х2 - 2гх + 3 = 0
45. Найдите общее решение уравнения у" — 2iy' + Зу = 0.
46. Найдите общее решение уравнения у" — iy' + 6у = 0.
47. Найдите общее решение уравнения 2/" = (—2 + 2iy/3)y.
48. Найдите решение задачи Коши (задачи с начальными условиями)
УC)=т 2/@) = 1, 2/@) = 2/"@) = 0.
Указание. Подставьте данные из начальных условий в общее решение
y{x) = Aex + Beotx + Cel3x,
где а и /3 — комплексно сопряженные корни уравнения г3 — 1 = 0. Покажите, что решением
задачи Коши (задачи с начальными условиями) является функция
y(*) = i(e* + 2e-*/2cos^).
49. Найдите решение задачи Коши (задачи с начальными условиями)
У{4)=УC)+у" + у' + 2у;
2/@) = у'@) = у"@) = 0,у(8)@) = 30.
266 Глава 3. Линейные уравнения высших порядков
50. В дифференциальном уравнении
у" + (sgn х)у = 0
один из коэффициентов является разрывной функцией
B5)
sgn ж
-ft
при ж > 0,
при х < 0.
Покажите, что несмотря на это, уравнение B5) имеет два линейно независимых решения у\ (х)
и 2/2 (х), определенных для всех ж, притом таких, что каждое из них
• удовлетворяет уравнению B5) во всех точках ж ф 0;
• имеет непрерывную производную в точке ж = 0;
• 2/1@) = у2@) = 1иу2@) = уЦ0) = 0.
(Указание. Каждое из решений yt(x) определено одной формулой для ж < 0 и другой для
ж ^ 0). Графики этих двух решений изображены на рис. 3.3.2.
*(*)
у20с)
Рис. 3.3.2. Графики решений yi(x)
и у2 (ж) из задачи 50
51. Согласно задаче 51 из раздела 3.1, с помощью подстановки v = In ж (ж > 0) дифференциальное
уравнение Эйлера второго порядка ах2у" + Ьху' + су — 0 можно преобразовать в однородное
линейное уравнение с постоянными коэффициентами. Покажите аналогичным образом, что
с помощью той же подстановки уравнение Эйлера третьего порядка
ах3у'" -Ь Ьх2у" + сху + dy — 0
(где а, Ь, с, d постоянны) сводится к уравнению с постоянными коэффициентами
°S+(b-3a)S+(c-b+2o^+^=°-
В задачах 52-58 с помощью подстановки v = In ж из задачи 51 найдите общие решения (для ж > 0)
уравнений Эйлера.
52. х2у" + ху' + 9у = 0
54. жУ" + 6жУ + 4ху' = 0
56. жУ" + ЗжУ + жу' = 0
58. жУ" + 6жУ; + 7жз/ + у = 0
53. жУ + 7ж2/' + 25у = 0
55. жУ" - жУ + ж?/ = 0
57. жУ" - ЗжУ + жу' = 0
3.4. Механические колебания
267
3.3. Приложение. Приближенные решения
линейных уравнений
Для решения задач, связанных с разложением многочленов на множителя (как, например,
в этом разделе), в ситуациях, когда это трудно или невозможно сделать явно, можно
использовать численные методы. С этой целью в калькуляторах и компьютерных программах
имеются функции для поиска приближенных значений корней многочленов. Например,
предположим, что мы хотим решить однородное линейное дифференциальное уравнение
'C)-32/" + 2/ = 0, A)
Ук
характеристическое уравнение которого имеет вид
г3 - Зг2 + 1 = 0.
B)
Среди функций стандартного графического калькулятора есть команда solve, которую
можно использовать для нахождения приближенных значений корней многочленов. На
рис. 3.3.3 и 3.3.4 приведены команды, с помощью которых мы нашли корни уравнения B):
г « —0,5321, 0,6527 и 2,8794. Некоторые подобные команды для систем компьютерной
алгебры:
fsolve(rA3 - 3*гА2 +1=0, г);
NSolve[rA3 - 3*гА2 + 1 == 0, г]
roots ([1 -3 0 1])
(Maple)
(Mathematical
(Matlab)
|solve<RA3-3R*+b
R, -1)
-.5321
solve<RA3-3R2+l,
R,l>
.6527
solve<RA3-3R*+b
R,3>
Рис. З.З.З. Чтобы найти решение
уравнения г3 — Зг2 +1 = 0 с помощью
калькулятора TI-83, требуется указать начальное
приближение для каждого корня
вштттшшш
1**2,8794 & рт .652? or»
m^nsfssmt
ж
за
Рис. 3.3.4. Решение
характеристического уравнения на калькуляторе TI-89
с помощью усовершенствованной
команды solve
(Комментарий. В команде MATLAB необходимо ввести вектор коэффициентов полинома
[1-3 0 1 ], причем коэффициенты полинома записываются в порядке убывания
степеней.) Таким образом, мы нашли приближенные значения корней. Поэтому общее
(приближенное) решение дифференциального уравнения A) можно записать в вида
у(х) = С1е-@'5321)* + С2е(°'6527>* + сзе^2'8794)*. C)
Используя подобным образом калькулятор или компьютер, найдите (приближенные)
общие решения следующих дифференциальных уравнений:
1. yW-3y' + y = 0
3. у(Ч + у' + у = 0
5. г/4) + 2у& -3у = 0
2. 2/C> + Зу" - Зу = 0
4. у<3> + Зу'у+ Ъу = 0
6. yW + Зу' - Ау = 0
268 Глава 3.. Линейные уравнения высших порядков
3.4. Механические колебания
Движение бруска, соединенного с пружиной — относительно простой пример колебаний,
возникающих в гораздо более сложных механических системах. Для многих подобных
систем задача исследования этих колебаний сводится к решению линейных
дифференциальных уравнений с постоянными коэффициентами.
Рассмотрим физическое тело (материальную точку) массой га, соединенное с
обыкновенной пружиной, которая оказывает сопротивление как растяжению, так и сжатию. Другой
конец пружины жестко закреплен в стене (как показано на рис. 3.4.1). Предположим, что
тело покоится на горизонтальной плоскости без трения и что оно может двигаться только
вперед или назад так, что пружина при этом сжимается или растягивается. Обозначим через
х расстояние от тела до его положения равновесия — положения, при котором пружина не
сжата и не растянута. Будем считать, что х > О, когда пружина растянута, и х < О, когда она
сжата.
I-—х—*|
i
i
Положение
равновесия
Рис. 3.4.1. Система, состоящая из тела
заданной массы, закрепленного на
пружине с амортизатором
Согласно закону Гука, возвращающая сила Fs, с которой пружина действует на тело,
пропорциональна расстоянию х, на которое пружина растянута или сжата. Так как это
расстояние равно смещению х тела массой га относительно положения равновесия, то сила
Fs = -кх. A)
Положительный коэффициент пропорциональности к называется жесткостью пружины
или коэффициентом жесткости пружины. Заметим, что Fs и х имеют разные знаки:
Fs < О при х > О и Fs > 0 при х < 0.
Показанное на рис. 3.4.1 тело также соединено с амортизатором—устройством,
поглощающим удары. Сила, с которой действует амортизатор, направлена в сторону, противополож- *
ную направлению движения тела массой га. Предположим, что амортизатор устроен таким
образом, что он действует с силой Fr, пропорциональной скорости v = dx/dt движения
тела, т. е.
^ dx
Fr = -cv = -с—. B)
Положительная постоянная с называется постоянной демпфирования, или
коэффициентом ослабления (поглощения, затухания) амортизатора. В общем случае можно считать,
что уравнение B) описывает силы сопротивления в системе (включая сопротивление воздуха
при движении тела массой га).
3.4. Механические колебания 269
Если кроме сил Fs и Fr на тело действует также заданная внешняя сила Fe = F(t)9 то
равнодействующая сил, действующих на тело, равна F = Fs + Fr + Fe- Используя второй
закон Ньютона
rp d2x n
F = та = m—z- = тх ,
at2
получим линейное дифференциальное уравнение второго порядка
> тх" + сх' + kx = F(t), C)
которое описывает движение тела.
Если амортизатор отсутствует (или мы просто пренебрегаем силами сопротивления),
коэффициент с в уравнении C) равен нулю. В этом случае колебания называются
незатухающими; при с > О колебания называются затухающими. Если на систему внешние
силы не действуют, F(t) в уравнении C) полагаем равным 0. Такие колебания называются
свободными. В случае F(i) ф 0 колебания называются вынужденными. Таким образом,
однородное уравнение
тх" + сх' + кх = 0
D)
описывает свободные колебания системы, состоящей из тела, пружины и амортизатора, не
подверженной воздействию внешних сил. Случай вынужденных колебаний будет
рассмотрен в разделе 3.6.
В качестве другого примера можно рассмотреть систему, в которой тело прикреплено
к нижнему концу подвешенной пружины. Верхний конец пружины закреплен неподвижно
(рис. 3.4.2). В этом случае сила тяжести W = тд тела растянет пружину на расстояние sq9
которое удовлетворяет уравнению A), причем Fs = — W и х = so- Иными словами, тд =
= fcso, откуда so = тд/к. Это положение статического равновесия тела. Обозначим через у
смещение тела при движении относительно положения равновесия, причем положительным
направлением будем считать направление вниз. В задаче 9 мы просим вас показать, что у
удовлетворяет уравнению C), т. е.
ту11 Л- су' + ку = F(t)
E)
с учетом сил сопротивления.
Положение,
статического
равновесия
Система в
движении
Рис. 3.4.2. Тело, подвешенное на пру&шне
270 Глава 3. Линейные уравнения высших порядков
Математический маятник
Дифференциальные уравнения C) и E) особенно важны потому, что они описывают
движение также и многих других простых механических систем. Рассмотрим, например,
математический маятник. Он состоит из материальной точки массой га, подвешенной на
невесомой нити (или на невесомом стержне) длиной L, причем эта материальная точка
качается из стороны в сторону, как показано на рис. 3.4.3. Положение тела в момент времени t
можно задать с помощью угла отклонения нити (или стержня) от вертикальной оси в = 9{i)
(положительного при отклонении против часовой стрелки). Чтобы получить
дифференциальное уравнение колебаний материальной точки массой га, запишем закон сохранения
механической энергии, согласно которому сумма кинетической и потенциальной энергии
тела постоянна.
Рис. 3.4.3. Математический маятник
Расстояние от положения равновесия 0 до материальной точки массой га вдоль дуги s =
= L6. Следовательно, скорость движения материальной точки равная = ds/dt = L(d6/dt)9
откуда кинетическая энергия
2 л /j/)\2
Т = -mv2
2
1 fdsy l To(d6\
2Ш [Tt) = 2mL [TtJ
Выберем в качестве начала отсчета самую низкую точку О, через которую проходит при
движении материальная точка (рис. 3.4.3). Тогда потенциальная энергия V равна произведению
гпд на высоту h = L(l — cos в) тела над точкой О, т. е.
V = mgL(l — cos#).
Поскольку сумма Т и V равна некоторой постоянной С, получим, что
-mL2 ( — ] + mgL(l - cos в) = С.
Продифференцировав обе части этого равенства по t, получим
T2(de\(d2e\ t _,. n.d$ п
отсюда после деления на mL2 (dO/dt) получим уравнение
<Р0 9 ■ л п
■d¥ + Isme = °-
F)
3.4. Механические колебания 271
Как известно, sin в « в при достаточно малых в. На самом деле при значениях \в\ не
превосходящих 7г/12 (или 15°) sin в и в совпадают до второго знака после запятой. А в обычных
часах с маятником в никогда не превышает 15°. Поэтому математическую модель
математического маятника можно упростить, заменив в уравнении F) sin в на 9. Если также включить
слагаемое ев' в качестве сил сопротивления окружающей среды, то в результате получим
уравнение, аналогичное уравнению D):
в" + ев' + кв = 0, G)
где к = g/L. Заметим, что в это уравнение не входит масса т тела, закрепленного на конце
стержня. Однако можно ожидать, что погрешность между значениями в и sin в может
накапливаться с течением времени, поэтому уравнение G) не будет точно отображать движение
маятника на протяжении длительного периода времени.
В оставшейся части этого раздела сначала будут рассмотрены свободные незатухающие
колебания, а затем — свободные затухающие.
Свободные незатухающие колебания
В случае, когда рассматриваемая механическая система состоит лишь из тела и пружины,
а внешние силы и сопротивление отсутствуют, уравнение C) принимает более простой вид
Удобно обозначить
и записать уравнение (8) в виде
тх" + кх = 0. (8)
"о = J-, (9)
V т
х" + и\х = 0. (80
Общее решение уравнения (8') представляет собой функцию
x(t) = Acosu>ot + Bsinu>ot. A0)
Чтобы исследовать колебания, описываемые этим решением, определим постоянные С
и а так, чтобы
В
С = V'А2 + В2, cosa = ~ и sina=~. A1)
О О
Геометрическая интерпретация этих постоянных показана на рис. 3.4.4. Заметим, что хотя
tga = В/А, угол а не равен значению арктангенса этой величины, так как арктангенс
принимает значения из интервала —7г/2 < х < 7г/2. Вместо этого, a — угол между 0 и 27г
такой, что его косинус и синус заданы равенствами A1), в которых и А, и В или даже обе эти
величины могут быть отрицательными. Поэтому
[ axctg(B/A), если А > 0, В > 0 (первая четверть),
а = < 7г + aictg(B/A), если А < 0 (вторая или третья четверть),
[ 27г + arctg(J5/A), если А > 0, В < 0 (четвертая четверть),
272 Глава 3. Линейные уравнения высших порядков
Рис. 3.4.4. Угол а
где arctg(JE?/yl) — значение угла из интервала (—7г/2,7г/2), которое вычисляется на
калькуляторе или компьютере.
В любом из этих случаев из равенств A0) и A1) получим
x(t) = С ( — coscuot + — sincjo^ I = C(cosacosu;o^ H- sin a sin u>ot).
По формуле косинуса суммы углов, это равенство можно переписать так:
x(t) = Ccos(ujot — a). A2)
Следовательно, тело колеблется около положения равновесия, причем колебание
описывается следующими параметрами.
1. Амплитуда
2. Круговая частота
3. Фаза
С.
шо
а.
Такие колебания называются гармоническими колебаниями6.
Если t измеряется в секундах, то круговая частота ujq имеет размерность радиан в
секунду (рад/с). Периодом колебаний называется время, необходимое системе для совершения
одного полного колебания (качания). Период колебаний равен
Т= —
0JQ
A3)
секундам. Частота колебаний равна
A4)
— i_ — ^2.
V ~ Т ~ 2тг
герц (Гц). Она равна количеству полных колебаний, совершаемых маятником за 1 секунду.
Заметим, что частота измеряется в колебаниях в секунду, в то время как круговая частота —
в радианах в секунду.
Типичный график зависимости смещения материальной точки, совершающей
гармонические колебания, от времени, т. е. график функции
x(t)
Ccos(u>ot — а) = С cos I ljq I t 1 1 = Ccos(u;o(£ —
s))
6 Отмечу, что их параметры часто называются иначе. Круговая частота часто называется циклической частотой
или угловой частотой, а фаза — фазовым углом, углом сдвига фа^илилтросто сдвигом по фазе. — Примеч. ред.
3.4. Механические колебания 273
4
тч . x(t) = С cos((uQt - а) /Т\
Ц б
/
\ /
\
\
Рис. 3.4.5. Простые гармонические колебания
приведен на рис. 3.4.5. Также там указан геометрический смысл амплитуды С, периода Т
и временной задержки7
6 =
а
UJQ
Если заданы начальное положение х@) = хо и начальная скорость х'@) = г^о
материальной точки, то сначала можно определить значения коэффициентов А и В в формуле A0),
а затем — амплитуду С и фазу а, выполняя указанные выше преобразования, приведшие
к формуле A2).
Пример 1
Тело массой m = ^ килограмм (кг) прикреплено к пружине. Пружина
под действием силы 100 ньютонов (Н) растягивается на 2 метра (м). Тело
начинает двигаться из начального положения xq = 1 (м) с начальной
скоростью vo = —5 (м/с). (Заметим, что из начальных данных следует,
что в момент времени t = 0 тело смещено вправо и движется влево.)
Найти уравнение движения данного тела, а также амплитуду, частоту,
период колебаний и временную задержку колебаний.
Решение Жесткость пружины к = A00Н)/Bм) = 50 (Н/м). Поэтому уравне-
b
х" + Шх = 0.
ние (8) принимает вид \х" + ЪОх = 0 или
Следовательно, круговая частота гармонических колебаний равна ии0
= л/100 = 10 (рад/с). Поэтому период колебаний равен
__ 27Г 27Г Л ,ЛЛЛ
Г= — = —«0,6283 с,
uq 10
а частота равна
,, = I = £ = i°„lf5915I4
Т 2тг 2тг
7 Называется также задержкой во времени, отставанием^ jio (во) времени и запаздыванием по (во) времени.
Примеч. ред.
274 Глава 3. Линейные уравнения высших порядков
Подставим теперь начальные условия х@) = 1 и х'@) = —5 в
уравнение движения
x(t) = Л cos 10t H-J5 sin 10t c x'{t) = -10^sinl0t-f lOBcoslOt.
Получим Л=1иБ = -|,т.е. уравнение движения тела в данном случае
имеет вид
x(t) = cos 10t — - sin lOt.
Следовательно, амплитуда колебаний
Чтобы найти значение временной задержки, запишем равенство
x{t) = —- ( —р cos 10t р sin 10t J = — cosA0t — a),
2 V\/5 v5 / 2
где фазовый угол a удовлетворяет условиям
2 1
cos a = —7= > 0 и sin a = 7= < 0.
Отсюда заключаем, что а лежит в четвертой четверти
а = 2тг + arctg I ~ ' Y. ] = 2тг - arctg(§) « 5,8195.
Поэтому временная задержка
* = —«0,5820 с.
Зная значения амплитуды и временной задержки, уравнение движения
тела можно записать в виде
x(t) « |\/5cosA0t - 5.8195).
ЕгоУрафик изображен на рис. 3.4.6. ■
Свободные затухающие колебания
Дифференциальное уравнение затухающих колебаний в случае отсутствия внешних ът
принимает вид тх" + сх' 4- кх = 0 или
х" + 2ра/ + wga? = 0, A^)
где о>о = у/к/т — круговая частота незатухающих колебаний и
р=^>0. A6)
3.4. Механические колебания
275
-0,5
Рис. 3.4.6. График уравнения движения x(t) . =
= Ccos(u;ot — ol) из примера 1, с амплитудой С « 1,118,
периодом Т « 0,628 и временной задержкой 5 « 0,582
Корни характеристического уравнения г2 + 2рг + и>2 = 0 дифференциального
уравнения^)
г1,2 = -р±(р2-и,*I/*. 07)
Вещественные они или комплексные — это зависит от знака подкоренного выражения
№ =
Акт
Am2
m
Am2
A8)
Поэтому критическое затухание8 ссг вычисляется по формуле ссг = у/Акт. Рассмотрим
отдельно три случая: с > ссг, с = ссг и с < ссг.
Случай сверхзатухания, или сильного демпфирования9: с > СсГ(с2 > Акт).
Поскольку с в этом случае относительно велико, мы имеем дело с большим сопротивлением при
относительно слабой пружине или малой массе. Тогда уравнение A7) имеет два различных
действительных корня г\ и Г2, причем они оба отрицательные. Уравнение движения имеет
вид
x(t) = cierit + с2е
Т2*
A9)
Ясно, что x(t) —» 0 при t —> +оо. Поэтому тело будет двигаться к своему положению
равновесия без каких-либо колебаний (задача 29). На рис 3.4.7 изображены графики некоторых
уравнений движения в этом случае. Выбрав фиксированное положительное значение xq9
мы показали зависимость уравнения движения от начальной скорорти vo. Во всех случаях
колебания были демпфированы (поглощены демпфером).
8 В некоторых случаях называется также затуханием на границе апериодичности и критическим
демпфированием. — Примеч. ред.
9 В этом случае затухание называется также закритическим. — Примеч. ред.
276 Глава 3. Линейные уравнения высших порядков
Рис. 3.4.7. Сверхзатухающие колебания: x(t) =
== c\erit + С2вГ2* при п < 0 и Г2 < 0. Приведены
графики решений с одинаковым начальным
положением хо и различными начальными скоростями
Случай критического затухания: с = ссг(с2 = 4кт). В этом случае корни
характеристического уравнения, определяемые из равенств A7), равны: г\ = г 2 = —р. Поэтому
общее решение имеет вид
x(t) = e-pt{Cl+C2t).
B0)
Поскольку e~pt > 0, а с\ + c^t имеет не больше одного нуля при положительных t9
материальная точка пройдет через свое положение равновесия не более одного раза. Ясно, что
x(t) —> 0 при t —> Н-оо. Графики некоторых уравнений движения в случае критического
затухания изображены на рис. 3.4.8. Заметим, что они очень похожи на аналогичные графики
в случае сверхзатухания (см. рис. 3.4.7). В случае критического затухания сопротивление
амортизатора достаточно для поглощения любых колебаний. Но даже небольшое
уменьшение сопротивления приводит к оставшемуся случаю, в котором поведение системы наиболее
поразительно.
Рис. 3.4.8. Случай критического затухания: x(t) = (с\ +
+ C2t)e~pt при р > 0. Изображены графики решений
с одинаковым начальным положением хо и различными
начальными скоростями
3.4. Механические колебания 277
Затухающие колебания10: с < ссг(с2 < Акт). Теперь характеристическое уравнение
имеет два комплексных сопряженных корня —p±i \/Щ~—~р*. Общее решение имеет вид
> x(t)=e-pt(Acosu1t + Bsmuj1t), B1)
где
= V ^о " р 2^ ' ( }
Используя, как и при выводе уравнения A2), формулу косинуса суммы, уравнение B1)
можно переписать как
x(t) = Ce~pt f — coscj\t H- — sina;it 1 ,
откуда
> x(t) = Ce~pt cos(u;i* - a), B3)
где
j± в
> C=yA2 + B2, cosa = — и sina=—.
G G
Решение B2) отображает экспоненциально затухающие колебания материальной точки
около положения равновесия. График функции x(t) лежит между "ограничивающими
амплитуду" кривыми х = —Ce~pt и х = Ce~pt, касаясь их в точках11, где uj\t — а кратно
7г. Такие колебания не являются гармоническими, а движение — периодическим12, но, тем
не менее, и в этом случае и)\ называется круговой частотой (или, более точно, круговой
частотой затухающих гармонических колебаний), Т\ = 2тг/lj\ — условным периодом
затухающих гармонических колебаний, а Ce~~pt — амплитудой затухающих
колебаний, или — чтобы подчеркнуть зависимость от времени, — амплитудой, зависящей от
времени. Геометрический смысл большинства этих величин указан на графике решения
уравнения затухающих колебаний,изображенном на рис. 3.4.9. Из уравнения B2) видно, что
в этом случае ш\ меньше, чем круговая частота незатухающих колебаний ujq9 поэтому Т\
больше периода Т колебаний тела такой же массой, подвешенного на такой же пружине, при
отсутствии амортизатора. Следовательно, действие амортизатора выражается, по крайней
мере, в двух явлениях.
10 В этом случае затухание называется также докритическим. — Примеч. ред.
11 Конечно, из этого совсем не следует, что именно в этих точках решение имеет локальные экстремумы.
Действительно, функция х = —Ce~pt монотонно возрастает, а функция х = Ce~pt монотонно убывает, потому
что производная первой функции везде положительна, а второй — везде отрицательна. Поэтому в точках
касания производная решения не обращается в нуль. Локальные экстремумы решения, как легко видеть, находятся
чуть левее точек касания. Теперь легко сообразить, что в моменты времени, равные абсциссам точек касания,
и скорость материальной точки отлична от нуля, что соответствует тому факту, что она чуть ранее прошла
очередную точку максимального удаления от положения равновесия и уже возвращается (притом с ненулевой
скоростью!) к положению равновесия. — Примеч. ред.
12 Оно называется квазипериодическим, если непериодические колебания в течение достаточно длительного
времени сохраняют основные характеристики физического процесса, например амплитуду колебания. В этом
случае колебания называются слабозатухающими. — Примеч. ред.
278
Глава 3. Линейные уравнения высших порядков
х О
V°i i
^ jc = Се~Р* cos {(О j t - а)
х = +Се~Р*
Рис. 3.4.9. Затухающие колебания: x(t)
= Ce~pt cos(o;i^ — а)
1. Амортизатор гасит колебания и они экспоненциально затухают (это выражается
в зависимости (уменьшении) амплитуды от времени).
2. Амортизатор замедляет движение, т. е. уменьшает частоту колебаний.
На следующем примере видно, что затухание обычно также увеличивает отставание
(задержку во времени) по сравнению с незатухающими колебаниями с теми же начальными
условиями.
Пример 2
Пусть теперь, как и в примере 1, материальная точка подвешена на
пружине, но, кроме пружины, на нее действует амортизатор с силой
сопротивления 1Н на каждый метр в секунду скорости. Тело приведено в движение
из того же начального положения х@) = 1с той же начальной скоростью
я'@) = — 5, как и в примере 1. Найдите уравнение движения тела, его
круговую частоту и условный период колебаний, временную задержку,
а также определите время, необходимое материальной точке для ее
первых четырех прохождений через точку а; = 0.
Решение Наэтотраз мы не будем использовать ранее выведенные формулы. Вместо
этого мы получим дифференциальное уравнение и затем найдем решение
в явном виде. Напомним, что га = |и& = 50; также имеем с = 1. Отсюда
уравнение D) принимает вид \х" + х' 4- 50х = 0 или
х" + 2а/ + 100а; = 0.
Запишем характеристическое уравнение: г2 + 2г Н- 100 = (г + lJ +
+ 99 = 0. Его корни 7*1,2 = —1 d= л/99 г, поэтому общее решение имеет
вид
x(t) = е~\А cos V991 + В sin V99t).
B4)
Следовательно, новая круговая частота затухающих колебаний uji
= л/99 « 9,9499 (сравните с cjq = 10 в примере 1). Условный период
:0,6315с
3.4. Механические колебания 279
и частота
1 шг л/99 , ^^
(сравните с Г « 0,6283 < Ti и v « 1,5915 > ^i в примере 1).
Подставим теперь начальные данные ж @) = 1иж'@) = — 5 в
уравнение движения B4). Тогда получим функцию скорости движения
x'{t) = -e_t(Acos V99t + BsinV99t) +
+ >/99 е"*(-Л sin \/991 + Б cos \/991).
Отсюда следует, что
х@) = А = 1 и а/@) = -А + Ву/§9 = -5.
Таким образом, А = 1 и В = — 4/>/99. Значит, уравнение движения тела
имеет вид
x(t) = е~* f cosV99t- -j==smV99t] .
Амплитуда затухающих колебаний равна
W<*+(-£)"--*-i/W---
Следовательно, можно записать уравнение движения
x(t) = ^-У^в-* | -^= cos V991 - -Д= sin \/§9 * | =
V99 \ч/И5 \/П5 )
= W—eos(\/99t-ai),
где фаза ai удовлетворяет условиям
л/99 4
cosai = . > 0 и sinai = == < 0.
VH5 VTTE
Поэтому а\ лежит в четвертой четверти, т. е.
аг = 2тг + arctg I ~JS; гг— ) = 2тг - arctg ( -^= ) « 5,9009,
и временная задержка
-4/VT15 \ ___ / 4 Л
\/99/\/П5у ~ аГ° g V VW
81 = — «0,5931с
^1
Глава 3. Линейные равнения высших порядков
(сравните с S я* 0,5820 < 8\ в примере 1). Подставив найденные
амплитуду затухающих колебаний и приближенное значение фазы, получим
уравнение движения в форме
x(t) * J Щ- e~l cos(\/991 - 5,9009). B5)
Ерафик этой функции представляет собой график гармонического
колебания, промодулированного убывающей экспонентой, как показано на
рис. 3.4Л 0 (сравните с графиком гармонических колебаний в примере 1).
Рис, 3.4.10. Графики функций смещения x(t) =
= С\ё~1 cos(o;it — ai) из примера 2 (затухающие
колебания), x(t) = Ccos(uot — а) из примера 1 (гармонические
колебания) и огибающих кривых x(t) = ±.C\e~l
Из B4) видно, что тело проходит положение равновесия (точку х = 0)
тогда, когда cos(u;i£ — c*i) = 0, т. е. при
U)\t — OL\
37Г 7Г 7Г 37Г
~2~'~2^'~2~'""'
или
t = 6l- -—,(Jl
2lji
7Г 7Г 37Г
А + 77" ,«! + ■
2o;i
2шг'
2uji'
Аналогично, в примере 1 (без затухания) тело проходит через положение
равновесия в моменты времени
_ » 37Г 7Г 7Г 37Г
2ujq ' 2о;о' 2о;о' 2u;o'
В следующей таблице приведены для сравнения четыре первых значения
tu h, £з» U, подсчитанные для гармонических и затухающих колебаний
соответственно.
3.4. Механические колебания 281
п
tn (незатухающие)
tn (затухающие)
1
0,1107
0,1195
2
0,4249
0,4352
3
0,7390
0,7509
4
1,0532
1,0667
В соответствии с этим на рис. 3.4.11 (где изображены лишь первых три
прохождения через положение равновесия) видно, что затухающие
колебания немного запаздывают по сравнению с гармоническими. ■
jc@ = C\ e~l cos (co1f — ах)
Рис. 3.4.11. Графики на интервале 0 < t < 0,8
иллюстрируют временную задержку, связанную с затуханием
3.4.Задачи
1. Определите период и частоту простых гармонических колебаний 4-килограммового тела на
конце пружины с жесткостью 16 Н/м.
2. Определите период и частоту простых гармонических колебаний тела массы 0,75 кг на конце
пружины с жесткостью 48 Н/м.
3. Тело массой 3 кг закреплено на пружине, которая удлиняется на 20 см под действием силы
в 15 Н. Тело начинает движение из точки хо = 0 с начальной скоростью г^р = —10 м/с. Найдите
амплитуду, период и частоту колебаний.
4. Тело массой 250 г закреплено на пружине, которая удлиняется на 25 см под действием силы
в 9 Н. В момент времени t = 0 тело оттянули на 1 м вправо (растянув пружину) и толкнули
влево с начальной скоростью 5 м/с. (а) Найдите смещение тела x(t) в форме Ccos(u;ot — a).
(Ь) амплитуду и период колебаний тела.
В задачах 5-8 предположим, что уравнение математического маятника длиной L имеет вид L6" +
+ дв — 0, где g = GM/R2 — ускорение свободного падения там, где расположен маятник (на
расстоянии R от центра Земли; М обозначает массу Земли).
282 Глава 3. Линейные уравнения высших порядков
5. Периоды колебаний двух маятников длиной L\ и L2, расположенных на расстояниях R\ и R^
от центра Земли, соответственно равны р\ и р%. Покажите, что
pi _ R\y/Li
Р2 R2VL2
6. Некоторый маятник точно отображает время в Париже, где R = 3956 (миль), но отстает на
2 минуты 40 секунд за день на экваторе. Используя результат задачи 5, найдите расстояние от
центра Земли до экватора.
7. Маятник длиной 100,10 дюймов, расположенный на уровне моря, где радиус земли R = 3960
(миль), имеет тот же период колебаний, что и маятник длиной 100,00 дюймов, расположенный
на близлежащей горе. Используя результат задачи 5, найдите высоту горы.
8. Большинство дедушкиных часов имеют маятники, длину которых можно регулировать. Одни
такие часы отстают на 10 мин в день при длине их маятника 30 дюймов. Какой длины должен
быть маятник, чтобы часы показывали точное время?
9. Попробуйте вывести уравнение E), которое описывает движение тела, подвешенного на
пружине. (Указание. Обозначьте через x(t) смещение тела вниз от нерастянутого состояния
пружины; найдите дифференциальное уравнение, которому удовлетворяет х, а затем подставьте
у = х — хо в полученное дифференциальное уравнение.)
10. Плавающий буй представляет собой однородный цилиндр радиуса г высотой h с плотностью
р ^ 0,5 (напомним, что плотность воды равна 1 г/см3). Предположим, что буй плавает так,
что ось цилиндра вертикальна. Вначале буй подвешен над водой так, что его нижнее
основание касается поверхности воды. В момент t = 0 его отпускают. На него действуют две силы:
направленная вниз сила тяготения, равная его весу тд = pirr2hg, и направленная вверх
сила Архимеда, равная весу пг2хд вытесненной им воды, где х = x(t) — глубина, на которую
погрузилось нижнее основание буя в момент времени t (рис. 3.4.12). Покажите, что буй будет
совершать простые гармонические колебания около своего положения равновесия хе = ph с
периодом р = 2n^ph/g. Вычислите р и амплитуду колебаний, если р = 0,5 г/см3, h = 200 см,
а 0 = 980 см/с2.
11. Цилиндрический буй весом 100 фунтов (массой т — 3,125 слагов (единиц массы в системе
фунт-сила, точнее, в системе единиц фут-фунт-секунда (fps)), т. е. 45,5 кг плавает в воде так,
что его ось вертикальна (как в задаче 10). Если на него немного надавить, а затем отпустить,
он будет совершать четыре колебания каждые 10 секунд. Пренебрегая сопротивлением среды,
найдите радиус буя.
12. Предположим, что Земля имеет форму шара, радиус которого равен R = 3960 (миль), а ее
масса равна М. Предположим также, что ее плотность одинакова по всему объему. Для частицы
массой т, находящейся внутри Земли на расстоянии г от центра, сила притяжения частицы
к центру Земли равна Fr = —GMrm/r2, где Мг обозначает массу той части Земли, которая
заключена внутри шара радиуса г. (а) Покажите, что Fr = —GMmr/R3. (b) Предположим,
что прямо через центр Земли просверлено небольшое отверстие, соединяющее диаметрально
противоположные точки ее поверхности. Частицу массой т в момент времени t = 0 бросили
в это отверстие с нулевой начальной скоростью. Обозначим через r(t) расстояние от центра
Земли до частицы в момент времени t (рис. 3.4.13). Учитывая второй закон Ньютона и результат,
полученный в пункте (а), покажите, что r"(t) = —k2r(t), где k2 = GM/R3 = g/R.
(с) Пусть д = 32,2 фут/с2. Учитывая результат пункта (Ь), покажите, что частица будет
совершать простые гармонические колебания от одного конца отверстия к другому с периодом около
84 минут, (d) Найдите (или выведите) период вращения спутника вокруг Земли, предполагая,
что он скользит по поверхности; сравните его с результатом пункта (с). Как вы объясните
совпадение? Является ли это совпадением? (е) С какой скоростью (в милях в час) частица
пролетает мимо центра Земли? (f) Найдите (или выведите) скорость полета спутника вокруг
3.4. Механические колебания 283
Рис. 3.4.12. Буй из задачи 10
Рис. 3.4.13. Частица массой
га, падающая в отверстие,
проходящее через центр земли
(задача 12)
Земли, предполагая, что он скользит по поверхности; сравните с результатом пункта (е). Как
вы объясните совпадение? Действительно ли это совпадение!
13. Пусть система состоит из тела заданной массы, закрепленного на пружине с амортизатором.
Пусть параметры системы следующие: т = 10, с = 9 и к = 2. Предположим, что тело
приведено в движение с начальными условиями х@) = 0 и ж'@) = 5. (а) Найдите смещение
x(t) и покажите, что график этой функции похож на изображенный на рис. 3.4.14. (Ь) Найдите,
насколько тело отклонится вправо перед тем, как начнет возвращаться в положение равновесия.
14. Пусть система состоит из тела заданной массы, закрепленного на пружине с амортизатором.
Пусть параметры системы следующие: т = 25, с = 10 и к = 226. Предположим, что тело
приведено в движение с начальными условиями х@) = 20 и х'@) = 41. (а) Найдите смещение
x(t) и покажите, что график этой функции похож на изображенный на рис. 3.4.15. (Ь) Найдите
условный период затухающих колебаний и уравнения огибающих, изображенных на рисунке
штрихами.
Рис. 3.4.14. Функция
смещения x(t) из задачи 13
20
10
х 0
-10
-20
i i i -j
1> 1
! I! s J
1 11 А*4
1 и,' ~i
_!! / _
И/ ~
7
t
1 1 1
10
t
15
20
Рис. 3.4.15. График смещения
x(t) из задачи 14
В оставшихся задачах этого раздела рассматриваются свободные затухающие колебания. В
задачах 15-21 тело массой т закреплено на пруэюине, жесткость которой равна к, и соединено
284 Глава 3. Линейные уравнения высших порядков
с амортизатором, коэффициент затухания которого равен с. Тело приведено в движение из
начального положения хо со скоростью vo. Найдите уравнение движения x(t) и определите тип
колебаний (затухающие, сверхзатухающие или предельные на границе апериодичности). В случае
затухающих колебаний запишите уравнение движения в виде x(t) = C\e~pt cos(uj\t — а\).
Найдите также уравнение движения без затухания u(t) = Co cos(u>ot — ао)> т. е. в случае, когда тело
приведено в движение из того же начального положения и с той же скоростью, но амортизатор
в системе отсутствует (в этом случае нужно положить с = 0). Наконец, проиллюстрируйте
эффект затухания, сравнив графики x(t) и u(t)).
15. га = §, с = 3, к = 4; х0 = 2, v0 = 0 16. га = 3, с = 30, к = 63; х0 = 2, v0 = 2
17. га = 1, с = 8, к = 16; х0 = 5, v0 = -10 18. га = 2, с = 12, fc = 50; х0 = 09v0 = -8
19. т = 4, с = 20, fc = 169; х0 = 4, w0 = 16 20. га = 2, с = 16, fc = 40; х0 = 5, v0 = 4
21. га = 1, с = 10, fc = 125; х0 = 6, v0 = 50
22. Тело весом 12 фунтов (массой га = 0,375 слагов (единиц массы в системе фунт-сила))
подвешено на пружине и прикреплено к амортизатору. Пружина растягивается на под действием веса
тела на 6 дюймов. Амортизатор оказывает сопротивление в 3 фута на каждый фут в секунду
• скорости, (а) Предположим, в момент времени t = 0 тело оттянули на 1 фут вниз из его
положения равновесия и сразу же отпустили. Найдите смещение x(t). (b) Найдите частоту,
амплитуду затухающих колебаний и фазовый угол колебаний.
23. В этой задаче рассматривается сильно упрощенная модель автомобиля весом 3200 фунтов
(массой га = 100 слагов (единиц массы в системе фунт-сила)). Предположим, что подвеска
автомобиля работает как обычная пружина, а амортизирующие устройства — как обычный
амортизатор. Иными словами, вертикальные колебания подвески удовлетворяют уравнению D)
с подходящими значениями коэффициентов, (а) Найдите коэффициент жесткости к пружины,
если известно, что автомобиль совершает 80 колебаний в минуту (колебание/мин) при
отсоединенных амортизаторах. (Ь) При подсоединенных амортизаторах, если машина проехала
/ ухаб, она совершает затухающие колебания с частотой 78 колебание/мин. Через какое время
амплитуда примет значение, равное 1% от начального значения?
В задачах 24-34 рассматривается система, состоящая из тела заданной массы, закрепленного
на пружине с амортизатором, причем в этой системе функция x(t), выражающая смещение,
удовлетворяет дифференциальному уравнению D). Обозначим хо = х@) и vo = х'@). Напомним
также, что р = с/Bт), ujq = k/m и ujf = ujq — р2. В каждой из задач также указано,
являются ли колебания в системе сверхзатухающими, затухающими или предельными на границе
апериодичности.
24. (Предельные колебания на границе апериодичности.) Покажите, что в этом случае
x(t) — (хо + vot 4- pxot)e~pt.
25. (Предельные колебания на границе апериодичности.) Используя результат задачи 24, покажите,
что тело проходит точку х = 0 в некоторый момент времени t > 0 тогда и только тогда, когда
хо и г^о + рхо разных знаков.
26. (Предельные колебания на границе апериодичности.) Используя результат задачи 24, покажите,
что x(t) имеет локальный максимум или минимум в некоторый момент времени t > 0 тогда
и только тогда, когда vo и vq + рхо одного знака.
27. (Сверхзатухание.) Покажите, что в этом случае
x(t) = — [(vo ~ r2x0)erit - (vo - rix0)eV2t] ,
где n, r2 = -p ± \Jp2 - ш% и 7 = (n - r2)/2 > 0.
3.4. Механические колебания 285
28. (Сверхзатухание.) Пусть хо = 0. Используя результат задачи 27, покажите, что
x(t) = —e~ptsinh7^-
7
29. (Сверхзатухание.) Покажите, что в этом случае тело может пройти через положение равновесия
х = 0 не более одного раза.
30. (Затухающие колебания.) Покажите, что в этом случае
лл -pt ( , , ^о+ рхо . Л
x(t) = е р xocoso;i£4 sinu;i£ .
V Ш! J
31. (Слабо затухающие колебания.) Применив разложение в ряд, покажите, что если коэффициент
поглощения с мал по сравнению с y/Smk, то
~2 \
32. (Затухающие колебания.) Покажите, что если
tg(ujit-a) = ,
то функция
x(t) = Ce~pt cos(u>it — а)
достигает своего локального экстремума (минимума или максимума). Докажите, что если t\
и ^2 — моменты времени, в которые эта функция достигает последовательных максимумов, то
ti — ti = 2tt/u)i.
33. (Затухающие колебания.) Пусть х\ и Х2 — два последовательных максимальных значения x(t).
Используя результат задачи 32, покажите, что
. х\ 2ттр
In — = —-.
Х2 Wi
Постоянная А = 2-Kpjuj\ называется логарифмическим декрементом осциллятора. Обратите
внимание, что с = тшгА/тг, так как р = с/Bт).
Замечание. Используя результат задачи 33, можно придумать метод измерения вязкости
жидкости. Вязкость является важным параметром в гидродинамике, однако измерить ее
непосредственно достаточно сложно. Согласно закону Стокса о медленном движении твердого тела
в жидкости, на сферическое тело радиусом а, которое движется (относительно медленно) в
жидкости с вязкостью \л, действует сила сопротивления Fr = Q-Kjiav. Поэтому, если сферическое
тело подвесить на пружине так, чтобы оно погрузилось в жидкость, и привести в движение,
то благодаря этой силе сопротивления колебания будут затухать с коэффициентом затухания
с = б7га/х, Частоту иг и логарифмический декремент затухания А колебаний можно измерить
непосредственно. Используя последнюю формулу задачи 33, несложно найти с, а значит, и вязкость
жидкости.
34. (Затухающие колебания.) Тело весом 100 фунтов (массой т — 3,125 слага (единицы массы
в системе фунт-сила)), закрепленное на пружине и соединенное с амортизатором, совершает
колебания. Тело достигло двух своих первых локальных максимумов смещения, равных 6,73
и 1,46 дюймов в моменты времени 0,34 и 1,17 секунд соответственно. Вычислите коэффициент
затухания (в фунтах в секунду на фут) и коэффициент жесткости пружины (в фунтах на фут).
286 Глава 3. Линейные уравнения высших порядков
Дифференциальные уравнения и детерминизм
Пусть заданы масса т тела, коэффициент демпфирования с и коэффициент жесткости пружины
к. По теореме 2 из раздела 3.1 уравнение
тх" + сх + кх = 0 B6)
имеет единственное решение для t ^ О, удовлетворяющее данным начальным условиям х@) = хо,
х'@) = vo. Поэтому последующее движение идеальной системы, состоящей из тела,
закрепленного на пружине с амортизатором, полностью определяется дифференциальным уравнением
и начальными данными. Конечно, в реальной физической системе невозможно измерить т, с и к
точно. В задачах 35-38 исследуется связанная с этим неопределенность (неточность,
неуверенность, ненадежность, недостоверность, погрешность, если хотите) в предсказании поведения
физической системы.
35. Предположим, что в уравнении B5) т = 1, с = 2 и /г = 1. Покажите, что решением,
удовлетворяющим условиям х@) = О и х'@) = 1, является функция
Xl(t) =te~\
36. Предположим, что m = 1 и с = 2, но fc = 1 — 10п. Покажите, что решением уравнения B5),
удовлетворяющим условиям х@) = 0 и х'@) = 1, является функция
• x2(t) = 10пе~* sinh 10~nt.
37. Предположим, что т = 1 и с = 2, но & = 1 + 10~2п. Покажите, что решением уравнения B5),
удовлетворяющим условиям ж@) = 0 и х'@) = 1, является функция
x3(t) = 10ne_t sinl0~n*.
38. Хотя графики xi(t) и хг(£) похожи на графики на рис. 3.4.7 и 3.4.8, график жз(£) демонстрирует
затухающие колебания, подобные показанным на рис. 3.4.9, но с очень большим условным
периодом затухающих колебаний. Тем не менее, покажите, что для любого фиксированного
t>0
lim X2(t) = lim жз(£) = x\(t).
п—юо n—►oo
Таким образом, на заданном конечном временном интервале эти три решения "практически
совпадают" при достаточно больших п.
3.5. Неоднородные уравнения и метод
неопределенных коэффициентов
В разделе 3.3 мы научились решать линейные однородные дифференциальные уравнения
с постоянными коэффициентами. Но в разделе 3.4 мы видели, что если в простых
механических системах учитывать внешние силы, то в дифференциальном уравнении появляется еще
одно (или несколько) слагаемое, и уравнение перестает быть однородным. В общем случае
неоднородное линейное дифференциальное уравнение тг-го порядка с целыми
коэффициентами имеет вид
> Oni/<n> + ап-гу^-^ + • • • + а1У' + а0у = f(x). A)
3.5. Неоднородные уравнения и метод неопределенных ... 287
По теореме 5 из раздела 3.2, общее решение уравнения A) можно представить в виде
► У = Ус + УР, B)
где дополняющая функция ус (х) является общим решением соответствующего однородного
линейного уравнения
апу{п) 4- ап-1у(п-^ + ... + aiy' 4- а0у = 0, C)
аур (х) — частное решение уравнения A). Таким образом, необходимо научиться находить ур.
Метод неопределенных коэффициентов позволяет непосредственно найти
необходимое решение в случае, когда данная функция f(x) в уравнении A) достаточно проста для
того, чтобы можно было сделать предположения об общем виде ур. Например,
предположим, что f(x) — многочлен степени га. Тогда, поскольку производные многочлена также
являются многочленами более низких степеней, логично искать решение в виде функции
ур(х) = Атхт 4- Am_ixm_1 Н + Агх 4- А0,
которая также является многочленом степени га, но с (пока) неопределенными
коэффициентами. Затем, подставив выражение для ур в уравнение A) и приведя подобные (для этого
достаточно просуммировать коэффициенты при одинаковых степенях ж), можно попытаться
найти значения Ao,Ai,..., Ат такие, что ур действительно будет решением уравнения A).
Подобным образом можно поступить и в том случае, когда
f(x) = a cos kx + Ь sin kx.
^В этом случае логично попытаться найти частное решение в виде
ур(х) = A cos kx Л- В sin kx,
т.е. в виде линейной комбинации с неопределенными коэффициентами А и В. Причина
заключается в том, что любая производная линейной комбинации функций cos kx и sin kx
также является линейной комбинацией этих функций. В этом случаемы можем подставить
выражение для ур в уравнение A) и привести подобные при cos kx и sin kx в обеих частях
полученного уравнения, а затем попытаться определить значения А и В, при которых ур
действительно будет частным решением.
Таким образом, что этот метод подходит в том случае, когда производные f(x) имеют
шже вид, что и сама функция /(ж). Перед описанием этого метода во всей его общности
в качестве иллюстрации предварительно приведем несколько примеров его применения.
^^^^П Найдем частное решение уравнения у11 4- Зу' 4- Ау = Зх 4- 2.
Решение Здесь f(x) = Зх 4- 2 — многочлен степени 1. Поэтому полагаем
ур(х) = Ах-\- В.
Тогда ур = А и у'р' = 0, так что ур удовлетворяет дифференциальному
уравнению, если
@) 4- 3(A) 4- ЦАх 4- В) = Зх 4- 2.
288 Глава 3. Линейные уравнения высших порядков
Это так тогда и только тогда, когда А А = 3 и ЗА + 4Б = 2. Система этих
двух уравнений имеет решение А = ^и В = — ^, поэтому мы нашли
частное решение
УР(х) = \х-±. Ш
Пример 2
Найдем частное решение уравнения у" — 4у = 2е
Зх
Решение Любая производная функции е3х имеет вид произведения е3х на
константу. Поэтому логично попытаться испытать в качестве решения
ур(х) = Ае3х.
В этом случае ур' = 9 Ае3х, поэтому данное дифференциальное уравнение
удовлетворяется, если
v 9Ае3х - 4(Ае3х) = 2е3х.
Отсюда находим 5А = 2, откуда А р= |. Поэтому одним из частных
Ь
решений будет ур(х) = |е3х
Пример 3
Найдем частное решение уравнения Ъу" 4- у' — 2у = 2 cos x.
Решение Поначалу кажется, что решение можно попытаться найти в виде ур (х) =
= A cos х. Однако из-за присутствия у' в левой части, возможно,
потребуется слагаемое, которое содержит также и sin x. Поэтому попробуем их
линейную комбинацию
ур(х) = A cos х 4- В sin ж;
ур(х) — —A sin х 4- В cos ж,
ур(х) — — Acosx — Bsinx.
Тогда постановка ур и ее производных в данное дифференциальное
уравнение даст
3(—Acosx—Bsmx)+{—Asmx+Bcosx) —2 (A cos x+i? sin #) = 2 cos я.
Приведя подобные (просуммировав коэффициенты) при cos ж и sin x
в обеих частях уравнения и приравняв коэффициенты слева и справа,
получим систему уравнений
-ЬА+ В = 2,
-А - ЪВ = О,
которая имеет решение А = — ^, В = ~. Так что в качестве искомого
частного решения можно взять
ур(х) = — j^cosx 4- ^sinx. ■
3.5. Неоднородные уравнения и метод неопределенных ..
289
Пример 4
Следующий пример внешне похож на пример 2. Однако он показывает, что метод
неопределенных коэффициентов не всегда так прост, как кажется на первый взгляд.
Найдем частное решение уравнения у" — 4у = 2е2х.
Решение Если подставить ур(х) = Ае2х, то получим, что
$ - 4ур = 4Ае2х - 4Ае2х = 0^ 2е2х.
Поэтому независимо от конкретного значения А, функция Ае2х не может
удовлетворять данному неоднородному уравнению. Фактически
приведенные вычисления показывают, что Ае2х удовлетворяет
соответствующему однородному уравнению. Поэтому необходимо придумать такую
основную функцию ур(х), чтобы ее производные включали как е2х, так
и еще что-нибудь другое, что может сократиться при подстановке в
дифференциальное уравнение, причем в результате приведения подобных
должно остаться нужное нам слагаемое е2х. Правдоподобно
предположить, что подойдет функция
ур(х) = Ахе2х,
производные которой
у'р(х)=Ае2х + 2Ахе2х и у'р'(х) = 4Ае2х + 4Ахе2х.
Подстановка в исходное дифференциальное уравнение дает
(Ые2х + Ыхе2х) -А(Ахе2х) = 2е2х.
Слагаемые, подобные хе2х9 сократились. Осталось лишь 4Ае2х = 2е2х9
откуда А = |. Следовательно, одним из частных решений является
функция
УР(х)
\хг2х.
Общий метод неопределенных коэффициентов
Сложности в примере 4 появились из того, что функция f(x) = 2e2x удовлетворяет
соответствующему однородному дифференциальному уравнению. Правило 1 позволяет выбрать
вид решения в том случае, если подобных трудностей нет, а правило 2 — в том случае, когда
такие трудности есть.
Метод неопределенных коэффициентов применим, когда функция f(x) в уравнении A)
является (конечной) линейной комбинацией произведений функций следующих трех видов.
1. Многочлен от переменной х\
2. Экспонента егх\
3. cos kx или sin kx.
D)
290 Глава 3. Линейные уравнения высших порядков
Любая такая функция, например
f(x) = C - 4х2)е6х - 4х3 cos 10ж,
обладает тем ключевым свойством, что сама функция f(x) и ее производные всех порядков
содержат только конечное число линейно независимых функций в качестве своих слагаемых.
(После приведения подобных^разумеется. —Примеч. ред.) В правилах 1 и 2 подразумевается,
что Ly = f(x)— неоднородное линейное уравнение с постоянными коэффициентами,
а функция f(x) имеет именно такой вид.
Правило 1
Метод^ неопредепенных коэффициентов
fcW°'«.«4 '^£ ***e&W&V^* Ш-
*f .Jai&s* «;*?&</**' '•sfrHtw'/
•'g^*S*'*>-*»-,t»4*'-tA^W«=-,*..«-' ^i, '-vU",'
Предположим, что ни одно из слагаемых в функции f{x) или любой ее производной не
удовлетворяет соответствующему однородному дифференциальному уравнению Ly = 0. Тогда
в качестве пробного решения ур необходимо взять линейную комбинацию всех таких
линейно независимых слагаемых и их производных. Затем нужно определить коэффициенты
полученной линейной комбинации, подставив это пробное решение в исходное
неоднородное дифференциальное уравнение Ly = f(x). A
Заметим, что это правило не теорема, требующая доказательства. Это лишь общая
процедура для поиска частного решения ур. Если удастся найти такое ур9 то это и будет
необходимым результатом. (Однако можно доказать, что эта процедура всегда будет успешной при
указанных предположениях.)
На практике предположения в правиле 1 можно проверить, использовав сначала
характеристическое уравнение для поиска общего решения соответствующего однородного
дифференциального уравнения уС9 а затем выписав список всех слагаемых, которые входят
в запись функции f(x) и ее производных. Если ни одно слагаемое из списка не совпадает со
слагаемыми из ус, тогда можно применять правило 1.
Пример 5
Найдем частное решение уравнения
у" + 4у = 3х3.
E)
Решение (Известным) общим решением однородного уравнения,
соответствующего уравнению E), является функция
Ус(х) — с\ cos 2х + С2 sin 2x.
Функция /(ж) = Зх3 и ее производные являются произведениями на
константы линейно независимых функций х3,х2,хи1. Так как ни одна
из них не входит в ус, попробуем
ур = Ах3 4- Вх2 + Сх + JD,
у'р = ЗАх2 + 2Вх + С,
у'р' = 6Ах + 2В.
Пример 6
3.5. Неоднородные уравнения и метод неопределенных ... 291
Подстановка в уравнение E) дает
у'р' + 4ур = FАх 4 2Б) 4 4(Ахг 4 Вх2 4 Сх 4 D) =
= 4Ах3 4 4Вх2 4 FА 4- 4С)я 4 BВ 4 £>) = Зх3.
Приведя подобные в последнем уравнении (просуммировав
коэффициенты при одинаковых степенях х)9 получим систему уравнений
АА = 3, 4Б = О,
6А + 4С = 0, 2Б + £ = 0.
Она имеет решение А= |, Б = О, С = — § и Z2 = 0. Поэтому функция
Ур(х) = ^# — -gX ш
представляет собой одно из частных решений уравнения E).
Найдем решение задачи Коши (задачи с начальными условиями)
у" - Зу' + 2у = Зе~х - 10 cos Зх;
2/@) = 1, 2/@) = 2. F)
Решение Характеристическое уравнение г2 — Зг 4 2 = 0 имеет корни г = 1 и г = 2,
поэтому общим решением соответствующего однородного уравнения
является функция
ус(х) = схех + с2е2х.
В записи функции f(x) — Зе~х —10 cos Зх и ее производных встречаются
следующие слагаемые: е~х, cos3# и sin3x. Так как ни одно из них не
входит в ус, подставим
ур = Ае~х 4- В cos Зх 4 С sin Зх,
ур = -Ае~х - 3Bsin3# 4 3Ccos3:r,
у£ = Ае~х - 9Bcos3x - 9Csin3x
в наше уравнение. После подстановки этих выражений в уравнение F)
и приведения подобных слагаемых получим равенство
Ур ~ 32/р + 2уР = 6Ае~х 4 (-7Б - 9С) cos Зх 4 (9В - 1С) sin Зх =
= 3e~x-10cos3:r.
Приравняем коэффициенты при е~х, при cos3# и при sin3x. Полним
систему уравнений
6А= 3,
-1В - 9С = -10,
9В-7С= 0,
292 Глава 3. Линейные уравнения высших порядков
которая имеет решение А — |, В = ~ и С = ^. Отсюда получим
частное решение
ур(х) = \е~х 4 j£ cos Зх 4- ^ sin Зх,
которое, однако, не удовлетворяет начальным условиям F).
Чтобы найти решение, удовлетворяющее начальным условиям,
начнем с общего решения
с±ех 4- с2е2х + \е х 4- ~ cosЗх + ~ sin Зх,
Пример 7
у(я) = Ус(х) 4 ур(я?) =
2^ . уд wo"-' "т 13'
производная которого
2/'(х) = ciex 4- 2с2е2х - \е~х - f| sin3x + § cos3x.
Из начальных условий F) получим систему уравнений
у@) = С1+Сй4-1 + ^ = 1,
у'@) = ex 4 2с2 - | + § = 2,
решением которой будут числа с\ = — |,С2 = ^. Таким образом, искомое
частное решение имеет вид
2,C) = - \ех 4 ^е2ж 4- \е~х 4 ^ cos Зх + ^ sin Зх. ■
Найдем общее решение уравнения
s/^+V^xsinx + xV*. G)
Решение Характеристическое уравнение г3 4 9г = О имеет корни г = 0, г = — Зг
и г = Зг. Поэтому общим решением соответствующего однородного
уравнения является функция
ус(х) = с\ -f C2 cos Зх 4- сз sin Зх.
Производные правой части уравнения G) содержат слагаемые
cosx, sinx, xcosx, xsinx,
е2х, хе2х и х2е2*.
Поскольку ни одно из слагаемых не входит в общее решение однородного
уравнения, в качестве пробного решения можно взять
ур(х) — Acosx+J5sinx4Crxcosx4-£>xsinx4-^e2x4Fxe2a;4Gx2e2a;.
Подставляя ур в уравнение G) и приводя подобные, получаем семь
уравнений, позволяющих определить семь коэффициентов А, В, С, D, Е, F
иС. ■
3.5. Неоднородные уравнения и метод неопределенных ... 293
Случай совпадения слагаемых
Теперь рассмотрим случай, когда правило 1 неприменимо, т. е. когда некоторые
слагаемые, которые входят в функцию f(x) и ее производные, удовлетворяют соответствующему
однородному дифференциальному уравнению. Пусть, например, мы хотим найти частное
решение дифференциального уравнения
(D-rKj/-Bx-3)erx. (8)
Следуя правилу 1, мы попытались бы в качестве решения взять функцию вида
ур(х) = Аегх + Вхегх. (9)
Но этот вид ур(х) не подходит, так как общим решением однородного уравнения
соответствующего уравнению (8) является функция
ус(х) = сгегх + с2хегх + с3х2егх. A0)
По этой причине подстановка (9) в левую часть уравнения (8) даст в правой част» нуль, а не
{2х - 3)егх.
Чтобы подправить вид нашей функции, заметим, что
(D - гJ[Bх - 3)erx] = [D2Bx- Щегх = 0
согласно равенству A3) из раздела 3.3. Пусть у (х) — любоерешение уравнения (8). Применим
оператор (D — гJ к обеим частям уравнения. Тогда получим, что у{х) также является
решением уравнения (D — г)ъу = 0. Общим решением этого однородного уравнения является
функция
у(х) = сгегх + с2хегх + с3х2егх + Ах3егх + Вх4егх .
N v ' > s, '
Ус Ур
Поэтому каждое решение исходного уравнения (8) можно представить в виде суммы
решения соответствующего однородного уравнения и частного решения в виде
ур(х) = Ах3егх + Вх4егх. A1)
Заметим, что правая часть равенства A1) может быть получена умножением всех слагаемых
функции (9) (наше первоначальное предположение о виде решения) на наименьшую целую
положительную степень х (в нашем случае х3), достаточную для того, чтобы ур(х) и общее
решение однородного уравнения ус(х) (в данном случае его дает формула A0)) не содержали
подобных членов. Эта процедура применима и в общем случае.
Чтобы упростить применение общей процедуры, предусмотренной правилом 2, заметим
следующее. Для того чтобы найти частное решение неоднородного линейного
дифференциального уравнения
Ly = fi(x) + f2(x), A2)
достаточно найти по отдельности частные решения Y± (x) и Y2 (x) двух уравнений
Ly = h{x) и Ly = f2(x) A3)
294 Глава 3. Линейные уравнения высших порядков
соответственно. Из линейности тогда следует, что
Ь[¥г + У2] = ЬУг + LY2 = Д (х) + /2(ж),
откуда 2/р = Fi 4- Y2 будет частным решением уравнения A2). (Это похоже на "принцип
суперпозиции" для неоднородных линейных уравнений.)
Теперь наша задача состоит в том, чтобы найти частное решение уравнения Ly = /(#),
где f(x) — линейная комбинация произведений элементарных функций из списка D). Йо-
этому f{x) можно записать в виде суммы слагаемых вида
Рш{х)егх cos kx или Pm(x)erx sin fcr, A4)
где Рш (х) — многочлен от х степени га. Заметим, что любая производная такого слагаемого
является суммой слагаемых того же вида, но содержит как синус, так и косинус. Процедура,
с помощью которой мы ранее получили частное решение A1) уравнения (8), может быть
обобщена следующим образом.
Правило 2
_ Метод неопределенных коэффициентов
Если функцию f(x) можно записать в виде A4), то в качестве пробного решения следует
взять
ур(х) = Xs [(А0 + А\х + А2х2 Н h Атхш)егх cos kx +
+ (Во + Вгх + В2х2 + • • • + Вшхш)егх smkx), A5)
где s — такое наименьшее неотрицательное целое число, что ур и общее решение
соответствующего однородного уравнения ус не содержат подобных членов. Затем необходимо
определить неизвестные коэффициенты в формуле A5), подставив ур в неоднородное
уравнение. А
На практике мы редко имеем дело с функцией f(x) в наиболее общем виде. В таблице
на рис. 3.5.1 приведен список некоторых пробных функций ур в чаще всего встречающихся
случаях, в которых га = О, г = 0 или к = 0.
С другой стороны, часто встречаются функции вида
/(aO = /i(aO + /2(*),
: ■ » #); ; - -: ■■-■:,, --'у- •■•"■'• ' г , - ■• - № " ' •-■ , : ■
= Ь0 + Ьхх + Ь2я2 + • • • + ЬтХт х*(А0 + Лхх + А2х2 + • • ■ + Атжт)
a cos for + 6 sin &ж х8 (A cos &ж + В sin /еж)
егж (а cos kx + 6 sin far) х*егж (A cos fcx + В sin /еж)
Рт(ж)егж xs (Ao + Aix + A2x2 + •••+ AmXm)erx
Prn(x)(a cos kx + Ьsin /ex) xs[(Ao + A\x H h Amxm)cos/ea:
+ (Bo + Вгх + • • • + 5m^) sin te]
Рис. 3.5.1. Подстановки для метода неопределенных коэффициентов'
3.5. Неоднородные уравнения и метод неопределенных ... 295
где Д (х) и /г (х) — различные функции типов, приведенных в таблице на рис. 3.5. L В таком
случае надо взять ур в виде суммы пробных функций для fi(x) и /г(х), выбрав 5 отдельно
для каждой части, чтобы устранить возможные совпадения слагаемых. Данная процедура
проиллюстрирована в примерах 8-10.
Пример 8
Найдем частное решение уравнения
у<3>+у" = 3е* + 4а;2. A6)
Решение Характеристическое уравнение г3 + г2 = 0 имеет корни п = гг = 0
и гз = —1, поэтому общим решением соответствующего однородного
уравнения является функция
ус(х) = а + с2х + с3е~х.
Сначала в качестве частного решения попытаемся взять сумму
(Aex) + (B + Cx + Dx2).
Часть Аех суммы, соответствующая Зех, не содержит слагаемых,
подобных слагаемым в общем решении. Но часть В + Сх + Dx2 необходимо
умножить на х2, чтобы устранить подобные члены. Таким образом,
можно взять
ур = Аех + Вх2 + Сх3 + Dx4,
ур = Аех + 2Вх + ЗСх2 + 4Dx3,
у'р' = Лех + 2В + 6Сх + 12£>х2 и
у^ = Аех + 6С + 24L>x.
Подставим найденные производные в уравнение A6). Получим
2Аех + BВ + 6С) + FС + 24£>)х + 12£>х2 = Зех + 4ж2.
Система уравнений
Пример 9
2Л = 3,
6С + 24D = 0,
= §, В = 4, С
2В + 6С = 0,
12£> = 4
= -JhD = |
имеет решение А = |, В = 4, С = — | и D = ^. Поэтому искомое
частное решение можно записать в виде
ур{х) = \ех + 4х2 - |х3 + \х*.
Найдем подходящий вид частного решения
у" + 6у' + 13у = е_3х cos 2x.
296 Глава 3. Линейные уравнения высших порядков
Решение Характеристическое уравнение г2 + 6г 4-13 = О имеет корни —3 ± 2г,
поэтому общим решением соответствующего однородного уравнения
является функция
Ус(х) = e~Sx(ci cos 2х 4- С2 sin 2х).
Это решение имеет такой же вид, что и пробное частное рещение
e~3x(Acos2x 4- Bsin2x), полученное с первой попытки, поэтому для
устранения подобных слагаемые частного решения необходимо
умножить на х. В результате получим
ур(х) = e~3x(Axcos2x + Bxsin2x). Ш
Пример 10
Определим подходящий вид частного решения для уравнения пятого
порядка
(D - 2K(D2 + 9J/ = х2е2х + xsin3x.
Решение Характеристическое уравнение (г — 2K(г2 4- 9) = 0 имеет корни г = 2,
2, 2, Зг и —Зг, поэтому общее решение соответствующего однородного
уравнения имеет вид
Ус(х) = с\е2х 4- С2хе2х 4- с$х2е2х 4- C4 cos Зх 4- с$ sinЗх.
Пытаясь получить частное решение, сначала рассмотрим сумму
[(А + Вх + Сх2)е2х] 4- [(£> + Яж) cos Зх + (F 4- <3ж) sin Зх].
Чтобы устранить члены, подобные слагаемым из ус(х)9 первую часть,
соответствующую х2е2х9 умножил
х sin Зх, — на х. Тогда получим
ответствующую х2е2х, умножим на х3, а вторую часть, соответствующую
ур(х) = (Ах3 4- Вх4 4- Сж5)е2х
4- (Dx 4- £ж2) cos Зх 4- (Fa; 4- Gx2) sin Зх. Ш
Вариация произвольных постоянных
Наконец, обратим внимание на случай, в котором метод неопределенных коэффициентов
неприменим. Рассмотрим, например, уравнение
y" + 2/ = tga;, A7)
которое на первый взгляд должно решаться аналогично рассмотренным примерам. Но это
не так; функция f(x) = tg x имеет бесконечно много линейно независимых производных
sec2 ж, 2 sec2 x tg ж, 4 sec2 x tg2 x 4- 2 sec4 ж,
Поэтому у нас нет подходящей конечной линейной комбинации, которую можно было бы
использовать в качестве пробного частного решения.
3.5. Неоднородные уравнения и метод неопределенных ... 297
Мы рассмотрим метод вариации произвольных постоянных, называемый иногда
методом вариации параметров, который всегда (точнее, когда могут быть вычислены
появляющиеся в нем интегралы) может быть использован для поиска частного решения
неоднородного линейного дифференциального уравнения
У{п) +Pn-i(*J/(n-1) + • • • +Pi(x)yl +po(x)y = /(ж), A8)
если уже известно общее решение
Ус = Ciyi + С22/2 + Ь СпУп A9)
соответствующего ему однородного дифференциального уравнения
У{п) +Pn-i{x)y{n-l) + • • • +Pi(x)y' +р0(х)у = 0. B0)
Изложим вкратце основную идею метода вариации произвольных постоянных.
Предположим, что мы заменили произвольные постоянные, или параметры, а, с2,..., сп в общем
решении A9) соответствующего однородного уравнения на переменные (т. е. на функции)
Щ> и2, • • • 9 ип от х. В каких случаях можно выбрать эти функции таким образом, чтобы
комбинация
ур(х) = иг(х)у1(х) + и2(х)у2(х) Н Ь ип(х)уп(х) B1)
была частным решением неоднородного уравнения A8)? Оказывается, что сделать это
можно во всех случаях.
По сути метод совершенно одинаков для всех порядков п ^ 2, но мы подробно опишем
его лишь для уравнений порядка п = 2. Таким образом, мы рассматриваем неоднородное
уравнение второго порядка
► L{y] = y" + P(x)y' + Q(x)y = f(x), B2)
причем пусть соответствующее однородное уравнение на некотором открытом интервале /
непрерывности функций PuQ имеет в качестве общего решения функцию
ус(х) = ciyi(x) + с2у2(х). B3)
Мы хотим найти функции и\ и и2 такие, что функция
> УР(х) = ui{x)yi{x) + u2(x)y2{x) B4)
будет частным решением уравнения B2).
Одно из условий, которым должны удовлетворять функции щ и и2, состоит в том, что
должно выполняться равенство L[yp] = /(ж). Так как для определения двух функций
необходимо иметь два условия, можно потребовать выполнения дополнительных условий. Мы
постараемся потребовать выполнения таких условий, которые максимально упрощают
вычисления. Однако сначала для проверки выполнения условия L[yp] = f(x) необходимо
найти производные ур и ypf. Используя формулу для производной произведения, получим
уравнение
УР = Ыу[ + и2у2) + (и[уг + и2у2).
298 Глава 3. Линейные уравнения высших порядков
Для того чтобы избежать появления вторых производных и" и и2, потребуем выполнения
дополнительного условия: вторая сумма должна быть равна нулю. Таким образом,
дополнительное условие можно записать так:
tt'iVi + *4г/2 = 0. B5)
Тогда
Ур = uiy[ + и2у2 B6)
и по формуле для производной произведения
Ур = (tilf/i + **2|#) + MVl + и2У2)- B7)
Но поскольку ух и у2 удовлетворяют однородному уравнению
у" + Ру' + Qy = 0,
соответствующему нашему неоднородному уравнению B2), то
у? = -ру; - Qvi B8)
для г = 1,2. Тогда из уравнения B7) следует, что
2/р = К у! + uW2) - р - Ыу'г + и2У2) - Q • (ит + ^Ы-
Используя уравнения B4) и B6), находим, что
Ур = Ktfi + v!2y'2) - Ру'р - Qyp;
откуда
ЧУр]-и\у[+и12у'2. B9)
Поскольку 2/р должно удовлетворять неоднородному уравнению B2), т. е. L[yp] = f(x), то
"il/i + t4w2 = /(*). . C0)
Наконец, уравнения B5) и C0) определяют необходимые нам функции щ и и2. Эти
уравнения образуют систему
u[yi + и'ай = 0,
> C1)
^lJ/i + ^22/2 = /0*0
двух линейных уравнений относительно двух производных и[ и и2. Заметим, что
определитель коэффициентов системы C1) является определителем Вронского W(yi, 2/2). Решив
систему уравнений C1) относительно производных и[ и и2, проинтегрируем их и получим
и\ и и2 такие, что
> yp = uiyi+1^22/2 C2)
будет искомым частным решением уравнения B2). В задаче 63 мы попросим вас проделать
эту процедуру явно и таким образом проверить формулу для ур (х) из следующей теоремы.
3.5. Неоднородные уравнения и метод неопределенных ... 299
Теореме
ариация произвольныхпостоянных
C#a4'4//VW«Mdk'Ji^
Если функция ус (х) = С12/х(х)+С2г/2(а:)являетсяобщимрешением однородного уравнения,
соответствующего неоднородному уравнению у" + Р{х)у' + Q{x)y = /(х), то одно из
частных решений неоднородного уравнения задается формулой
Ур(х) = -Ъ(х) J щх) dx + г/2(х) J ^(x) dx, C3)
где W — W(yi, г/2) — определитель Вронского двух линейно независимых решений yi и у2
соответствующего однородного уравнения. А
Пример 11
Найдем частное решение уравнения у" Л-у — tg х.
Решение Общее решение соответствующего однородного уравнения
представляет собой функцию ус(х) = с\ cos х + С2 sin х. Зная его, соответствующие
функции можно просто подставить в формулу C3). Но для наглядности
лучше записать уравнения C1) и решить их относительно и[ и и'2. В
данном случае
г/1 = cosx, г/2 = sinx,
у[ — — sinx, г/2 =: cosx.
Поэтому уравнения C1) имеют вид
(i^Xcosx) + (^2) (sinx) = 0,
(г^Х—sinx) + (i4)(cosx) = tgx.
Решив эти уравнения, получим
, . sin2 x
щ = —sinx tgx = = cosx — secx,
( COS X
v!2 = cos x tg x = sin x.
Откуда
u\ = (cosx — secx) dx = sinx — In| secx -f tgx|
и
U2 = sinxdx = —cosx.
(Понимаете ли вы, почему мы могли положить постоянные
интегрирования равными нулю?) Поэтому наше частное решение имеет вид
г/р(х) = ui(x)yi{x) + и2(х)у2(х) =
= (sinx — In | secx + tgx|)cosx + (—cosx) (sinx);
т.е.
Ур(х) == —(cosx) In I secx + tgx|. ■
300 Глава 3. Линейные уравнения высших порядков
3.5. 3ai
В задачах 1-20 найдите частное решение ур данного уравнения. Во всех этих задачах штрихи
обозначают производные по ж.
1. у" + 16у = е3х
3. у" -у' -6у = 2sin3x
5. у" + у' + у = sin2 х
7. у" — 4у = sinh х
9. у" + 2у' - Зу = 1 + хех
11. уC) + 4у' = Зж - 1
13. у" + 2у' + 5у = ех sin ж
15. уE) + 5уD) - 2/ = 17
17. у" + у = sin ж + ж cos ж ^
19. уE> + 2уC>+2у" = Зж2-1
2. у" - у' - 2у = Зх + 4
4. 4у" + 4у' + у = Зхех
6. 2у" + 42/' + Чу = х2
8. у" — 4у = cosh 2ж
10. у" + 9у = 2 cos Зж + 3 sin Зж
12. уC) + у' = 2 - sin ж
14. у<4> - 2у" + у = хех
16. у" + 9у = 2ж2е3* + 5
18. уD) - бу" + 4у = ех - же2*
20. 2/C) - 2/ = ех + 7
5 задачах 21-30 установите подходящий вид частного решения ур, не определяя при этом значения
коэффициентов.
21. у" -2у' + 22/ = ех sin ж
23. 2/" + 4у = Зж cos 2ж
25. 2/,, + 32/, + 22/ = ж(е-*-е-2*)
27. 2/D) + Ьу" + 4у = sin ж + cos 2ж
29. (D - 1K(£>2 - 4J/ = же25 + е2* + е~2х
22. 2/E) - 2/C) = е* + 2ж2 - 5
24. уC) - у" - 122/' = ж - 2хе~3х
26. у" - 6у' + 132/ = яе3ж sin 2ж
28. 2/D) + 92/" = (ж2 + 1) sin За;
30. 2/D) - 2у" + у = ж2 cos ж
5 задачах 31-40 найдите решения данных задач Коши.
31. у" + 4у = 2ж; 2/@) = 1, у'@) = 2 32. у" + 32/' + 2у = ех; у@) = 0, у'@) = 3
33. у" + 92/ = sin2x; 2/@) = 1, у'@) = ° 34- у" +У = cos ж; 2/@) = 1, у'@) = -1
35. у" - 2у' + 22/ = ж + 1; 2/@) = 3, у'@) = 0
36. 2/D) - 42/" = ж2; 2/@) = у'@) = 1,у"@) = 2/C)@) = -1
37. 2/C) - 22/" + 2/ = 1 + хех; 2/@) = у'@) = 0,2/,,@) = 1
38. у" + 2у' + 2у = зтЗж; у@) = 2, у'{6) = 0
39. уC) + у" = ж + в"*; у@) = 1, у'@) = 0, у"@) = 1
40. у<4> - у = 5; у@) = у'@) = 2/"@) = у<3>@) = 0
41. Найдите какое-нибудь частное решение уравнения
yw-yw-y"-y'-2y = 8x5.
42. Найдите решение задачи Коши (задачи с начальными условиями) для уравнения из задачи 41,
если заданы следующие начальные условия:
2/@)=у'@)=2/"@)=УC)@) = 0.
43. (а) Запишите частный случай формулы Эйлера
cos Зж -|- г sin Зж = е3гх = (cos x + г sin жK,
раскройте скобки и приравняйте действительные и мнимые части. Этим вы докажете
тождества
cos3 ж = f cos ж + 7 cos Зж,
• з
sin ж =
sin ж — j sin3a;.
3.5. Неоднородные уравнения и метод неопределенных ... 301
(Ь) Используйте результат пункта (а) для поиска общего решения уравнения
Ч i A 3
у 4-4^/ = cos х.
В задачах 44-46 найдите общие решения уравнений, применив тригонометрические тождества.
44- у" + у' + У = sin х sin Зх 45. у" + 9у = sin4 x
46. у" Л-у = х cos3 х
В задачах 47-56 с помощью метода вариации произвольных постоянных найдите какое-нибудь
частное решение данного дифференциального уравнения.
47. у" + Зу' + 2у = 4ех 48. у"
2у' -8у = Зе
-2х
— Ay = sinh 2x
+ 9у = sin Зх
+ у — esc2 х
49. у" - V + % = 2е2х 50. у"
51. у" + 42/ = cos Зх ' 52. 2/"
53. у" + 9у = 2 sec Зж 54. у"
55. 2/" + 42/ = sin2 ж 56. 2/" — 42/ = #еж
57. Подстановкой можно проверить, что функция ус = ах+С2Х~1 является решением однородного
уравнения, соответствующего неоднородному дифференциальному уравнению второго порядка
х у + ху — у = 72ж .
Но перед применением метода вариации произвольных постоянных необходимо разделить это
уравнение на старший коэффициент х2 и записать его в стандартной форме
У" + -У --^у = 72х3.
X Хг
Поэтому в уравнении B2) функция f(x) = 72ж3. Теперь решите соответствующие
уравнения C1) и найдите частное решение ур — Зх5.
В задачах 58-62 даны неоднородное дифференциальное уравнение и общее решение
соответствующего однородного уравнения ус. Примените метод задачи-57 для поиска какого-нибудь частного
решения данного уравнения.
58. х2у" — 4ху' + 62/ = х3; ус = с\х2 + С2Х3
59. х2у" - Зху' + 4у = х4; ус = х2{а + с2 In x)
60. 4х22/" - 4ж2/' + Зу = 8ж4/3; ус = cix + с2х3/4
61. х2у" + ху1 + 2/ = In х; ус = с\ cos(lna:) + сг sin(ln x)
, 62. (ж2 - 1J/" - 2ж2/ + 22/ = ж2 - 1; 2/с = cix + с2A + ж2)
63. Выполните все указанные в тексте преобразования для вывода формулы вариации
произвольных постоянных C3) из уравнений C1) и C2).
64. Примените формулу вариации произвольных постоянных C3) для получения частного решения
уР(х) = — ж cos а; неоднородного уравнения у" + у = 2 sin ж.
3.5. Приложение. Автоматизирование вариации
произвольных постоянных
Если в формуле вариации произвольных постоянных C3) интегралы сложны или
неудобны для ручных вычислений, ее можно использовать для вычислений с помощью систем
302 Глава 3. Линейные уравнения высших порядков
компьютерной алгебры. Например предположим, что мы хотим найти частное решение
уравнения
у" + y = tgx
примера 11, зная общее решение соответствующего) однородного уравнения ус(х) =
= с\ cos х + С2 sin х. Тогда последовательность команд на входном языке системы
компьютерной алгебры Maple
yl := cos(x):
у2 := sin(x):
f := tan(x):
W := yl*diff(у2,х) - y2*diff(yl,x):
W := simplify(W):
yp := -yl*int(y2*f/W,x) + y2*int(yl*f/W,x):
simplify(yp);
выполняет вычисления, указанные в формуле C3). Полученный результат
/1+sinaA
ур(х) = -(cos х) In
у \ cos х J
эквивалентен результату ур{х) = — (cos x) ln(sec х -f tg х), найденному в примере 11.
Аналогичная последовательность ком&нд на входном языке системы компьютерной алгебры
Mathematica
yl = Cos[x];
у2 = Sin[x];
f = Tanfx1] ;
W = yl*D[y2,x] - y2*D[yl,x] // Simplify
yp = -yl*Integrate[y2*f/W,x] + y2*Integrate[yl*f/W,x];
Simplifytyp]
выдает результат
^cos(x/2) + sin(o;/2)^
Ур(х) = -(cosж) In —7-^ , ; ' : ,
урк J v y \cos(a;/2)-sin(a;/2)>/ '
который (по формуле разности квадратов) также эквивалентен результату примера 11.
(Конечно, более новые версии систем компьютерной алгебры могут выдать и иные (хотя и
эквивалентные) результаты. Система компьютерной алгебры Mathematica 5.0 выдает, например,
результат в виде — 2 ArcTanh[Tan[z/2]]Cos[#]. — Примеч. ред.)
Чтобытакимжеобразомрешитьуравнениевторогопорядкау//+Р(а;J//Н-(Э(жJ/ = /(х),
зная общее решение ус(х) = с\у\{х) + С2У2(х) соответствующего однородного уравнения,
нужно вставить определения yi(x), уъ (#) и f(x) в начальные строки приведенной выше
программы. В задачах 1-6 найдите указанным образомчастноерешение2/р(ж) неоднородных
уравнений.
1« Уп + 2/ = 2sinx ур(х) = —xcosx
2. у" ~\-у = 4х sinх Ур(х) — х sin х — х2 cos x
3. у" + у = 12х2 sinх Ур(х) = 3#2 sinх + (Зх — 2х3) cos x
4. у" — 2yf + 2у = 2еж sin х 2/р(#) = — хех cos x
3.6. Вынужденные колебания и резонанс 303
5. у" - 2у' + 2у == 4хеж sin х ур (х) = ех (х sin х — х2 cos х)
6. у" - 2у' -f 2у = 12х2еж sin х УР{х) = ех [Зх2 sinх + (Зх - 2х3) cos x]
3.6. Вынужденные колебания и резонанс
В разделе 3.4 нами было получено дифференциальное уравнение
> rax" + cx' + fcx = F(t). A)
Это уравнение можно рассматривать в качестве закона одномерного движения материальной
точки массой га, закрепленной на пружине (жесткости к) и соединенной с амортизатором
(с коэффициентом^демпфирования с), на которое также действует внешняя сила F(t).
Многие механизмы с вращающимися частями обычно содержат системы, состоящие из тела,
закрепленного на пружине с амортизатором (или эквивалентные им), внешняя сила в
которых является гармонической:
F(t) = F0 cos ut или F(t) = F0 sin wt, B)
где постоянная F0 — амплитуда периодической силы, а и — ее круговая частота.
Чтобы понять, как возникает гармоническая сила в механизме с вращающимися частями,
рассмотрим тележку с вращающимся вертикальным маховиком (рис. 3.6.1). Масса тележки
без маховика (массой то) равна т — то. Центр масс маховика расположен на расстоянии
а от его геометрического центра. Угловая скорость вращения маховика равна ш (радиан
в секунду). Тележка прикреплена к пружине (жесткости к), как показано на рисунке.
Предположим, что центр масс тележки без маховика расположен прямо под центром маховика.
Обозначим через х(£) смещение тележки от ее положения равновесия (в котором пружина
не растянута). Из рис. 3.6.1 видно, что смещение х центра масс тележки вместе с маховиком
_ (га — mo)x + mo(x + acosu;£) m^a
х = ■ = х Н cosa;£.
га га
Пренебрегая силами сопротивления, второй закон Ньютона можно записать в виде гах" =
= - fcx, так как сила действия пружины равна—кх. Подставим выражение для х в последнее
уравнение. Тогда получим
гах" — тоаи2 cosut = —fcx,
Рис. 3.6.1. Система, содержащая тележку
и маховик
304 Глава 3. Линейные уравнения высших порядков
т.е.
тх" + кх = гпоаш2 cos ut. C)
Поэтому тележка с вращающимся маховиком ведет себя как закрепленное на пружине тело,
которое движется под действием внешней простой гармонической силы, амплитуда
которой равна F0 = m^auj2. Такая система является моделью стиральной машины с загрузкой
спереди, если центр масс одежды смещен относительно геометрического центра барабана.
Поэтому исследование решения уравнения A) с внешними силами вида B) имеет большое
практическое значение.
Незатухающие вынужденные колебания
Для изучения незатухающих колебаний под действием внешней силы F(t) = F0 cos cut
положим в уравнении A) с = 0. Рассмотрим полученное неоднородное дифференциальное
уравнение
> mx" + кх — F0 cos u;t. D)
Общим решением соответствующего однородного уравнения является функция хс =
= с\ cos иъЬ + С2 sin wot. Здесь
обозначает (круговую, или циклическую) собственную частоту колебаний системы,
состоящей из тела, закрепленного напружине. Предположим сначала, что внешняя и собственная
частоты не равны: ш Ф ujq. Чтобы найти частное решение, подставим хр — A cos ut в
уравнение D). (Мы не включили слагаемое с синусом в хр, так как в левую часть уравнения D)
не входит х'.) В результате получим
—muj2A cos u>t + fcAcoso;t = Fq cos ujt,
откуда
л= Fo = Fo/m
к — muj2 u>2 — u>2'
и поэтому
E)
Fo/m
Xpit) — —7y ^COSUt. F)
UJq~ Ш
Следовательно, общее решение х = хс + хр имеет вид
x(t) — с\ coscjn^ Н- С2 sinu;o^ H—о—~z cos cut' G)
UJq — Ш2
где постоянные с\ и c<i определяются начальными условиями ж@) и х' @). Так же как и
уравнение A2) из раздела 3.4, уравнение G) можно переписать в виде
x(t) = Ccos(uot — а) -\—о о cos cut. (8)
ujz — uj2
3.6. Вынужденные колебания и резонанс 305
Поэтому результирующее движение является суперпозицией двух колебаний: одного с
собственной частотой ujq, а другого — с частотой ш внешней силы.
Пример 1
Предположим, что т == 1, к = 9, Fo = 80 и ш = 5. Тогда
дифференциальное уравнение D) примет вид
х" + 9ж = 80cos5£.
Найдем ж(£), если х @) = #'@) = 0.
Решение В данном случае собственная частота и>о = 3 и частота внешней силы
ш — 5 не совпадают, как и в случае, рассмотренном выше. Сначала
подставим хр = A cos Ы в дифференциальное уравнение. Получим —25 А +
4- 9А = 80, откуда А = — 5. Следовательно, частное решение
жрМ — —5cos5£. ,
Общим решением соответствующего однородного уравнения является
функция хс = с\ cos 3£ + С2 sin 3t, поэтому общее решение данного
неоднородного уравнения можно записать в виде
x(t) = с\ cos 3£ + С2 sin 3£ — 5 cos 5t,
его производная
#'(£) = -3ci sin 3t 4- 3c2 cos 3t + 25 sin 5t.
Из начальных условий х@) = 0 и xf@) = 0 сле,дует, что с\ = 5 и с2 = 0,
откуда требуемое частное решение
x(t) — 5 cos 3£ — 5 cos Ы.
Как показано на рис. 3.6.2, период x(t) равен наименьшему общему
кратному 27г периодов 27г/3 и 27г/5 двух слагаемых с косинусами. ■
Рис. 3.6.2. График х(£) = 5 cos 3£ -
— 5 cos Ы из примера 1
306 Глава 3. Линейные уравнения высших порядков
Биения
Если мы потребуем, чтобы решение G) удовлетворяло начальным условиям х@) = х' @)
= 0, то получим
Поэтому частным решением является функция
с\ = ~„г.л ,:2n и с? = 0-
x(t) — —т-~9 от (cosart — coscjoO- (9)
m(ujQ — ujz)
Используя тригонометрическое тождество 2 sin A sin В = cos(A — В) — cos(A + В) при
А = | (a;0 +u))tnB = | (a;o — u>)£, уравнение (9) можно переписать в виде
IF
x(t) = —Т~q =5Т sin h(uo - v)tsin Ыыо + uj)t. A0)
m(a;5 - a;2) z - 2
Предположим теперь, что a; « a;o, поэтому u;o + о; велико по сравнению с \ujq — ш\. Тогда
sin |(u;o 4- u;)t будет быстро изменяющейся функцией, тогда как sin \{u>q — u>)t будет
медленно изменяющейся функцией. Значит, в этим случае уравнение A0) можно рассматривать
как частые колебания с круговой (циклической) частотой \ (cjo + cj),
x(t) = A(£)?sin |(cjq + ш%
но с медленно изменяющейся амплитудой
А(*) = ( 2 ° 2^ sin К^о ~ w)t.
ra(u>5 — u>2)
Пример 2
При m = ОД, F0 = 50, a;o = 55 и ш = 45 из уравнения A0) получим
x(t) = sin5£sin50£.
/Нарис. 3.6.3 изображены соответствующие колебания с частотой \ (ujq +
+ и)) = 50, которые "модулируются" амплитудной функцией А(£) =
= sin Ы с частотой | (о;о — о;) = 5.
■
Частые колебания со сравнительно медленным периодическим изменением амплитуды
демонстрируют явление биения. Например, если два недостаточно точно отрегулированных
духовых музыкальных инструмента (расстроенных один относительно другого)
одновременно играют одну и ту же ноту "до", одинсчастотойо;о/B7г) = 258 Гц, а другой—с частотой
о;/B7г) = 254 Гц, то будут слышны биения (т. е. изменение амплитуды звука)*; частотой
(a^a;)/2 = 258-254 ^,(Гц) ;"
27Г 2
3.6. Вынужденные колебания и резонанс 307
-1.4
х = sin 5t sin 50t
J L
J L
0.0 0.5 1.0 1.5 2.0 2.5 3.0
t
Рис. З.6.З. Явление биения
Резонанс
Из уравнения F) видно, что если собственная частота uq приблизительно равна внешней
частоте о;, то амплитуда А решения хр велика. Иногда полезно записать уравнение E) в виде
А =
FQ/k
= ±
pFQ
(И)
К — muj2 1 — (a;/(JoJ
Здесь Fo/k называется статическим смещением пружины жесткости к под действием
постоянной силы F0, a p—коэффициентом усиления; по определению он равен
|1 - {ш/ш0J\
Очевидно, что р —► +оо при и; —► а;о. Это явление резонанса — неограниченный рост (при
и -* а;о) амплитуды колебаний системы (при отсутствии сил сопротивления) с собственной
частотой luq под действием внешней силы с частотой ш « и>о.
Мы предполагали, что и> Ф щ- Какой же катастрофы следует ожидать, если и и и>о точно
совпадают? Тогда уравнение D), после деления всех слагаемых на т, примет вид
•р
х" + UqX = — cosa;ot.
m
A3)
Поскольку coso;ot является слагаемым общего решения соответствующего однородного
уравнения, в соответствии с методом неопределенных коэффициентов необходимо искать
частное решение в виде
xp(t) = t(A cos u>ot + Bsinujpt).
Подставим это выражение в уравнение A3) и получим, что А = 0 и В = Fo/Bmu>o). Таким
образом, частным решением является функция
F0
xp(t) =
-tsinuot.
A4)
2mujQ
Из графика xp(t), изображенного на рис. 3.6.4, где принято m = 1, Fo = 100 и ujq = 50,
хорошо видно, как (теоретически) неограниченно должна возрастать амплитуда колебаний
в случае чистого резонанса, и = о;о. Можно рассматривать это явление как усиление
собственных колебаний системы под действием внешних колебаний той же частоты.
308
Глава 3, Линейные уравнения высших порядков
1,5
1,0
0,5
н 0,0
-0,5 f-
-1,0
-1,5
kM
1111 Vfi
= t v*^* l\ ц ii
^f г. ч h • '» i- * П г
-iHJllihiililiiillj
ЭД1 illlllll Ii I
■1
^4/
< ;!
-^ i! I!!!
jc = r sin 50r
I I L
/ "^ Ц » - ., i
/ 4j \t И
■!
Si
0,00 0,25 0,50 0,75 1,00 1,25 1,50
t
Рис. З.6.4. Явление резонанса
Пример 3
Предположим, что в системе, состоящей из тележки и маховика (рис. 3.6.1),
т = 5кги что к = 500 Н/м. Тогда собственная частота колебаний и>0 =
= у/к/т = 10 рад/с; т. е. 10/B7г) « 1,59 Гц. Поэтому следует ожидать
колебаний очень большой амплитуды, если маховик вращается со
скоростью приблизительно 1,59 х 60 « 95 оборотов в минуту. ■
На практике механическая система с очень малым затуханием под действием
резонансных колебаний может сломаться. Впечатляющим примером может служить марш в ногу
колонны солдат по мосту. Любая столь сложная конструкция, как мост, имеет много
собственных частот колебаний. Если частота шага приблизительно совпадает с одной из собственных
частот моста, то, как и в примере с телом, подвешенным на пружине, возникнет резонанс.
И на самом деле амплитуда резонансных колебаний может достичь значений, достаточных
для разрушения моста. Такие случаи действительно случались: например, в 1831 году в
Англии близ Манчестера обвалился мост Broughton Bridge. По этой причине сейчас во многих
уставах при движении по мосту предусмотрена команда "сбить ногу". Вполне возможно,
что именно резонанс был причиной катастрофы в Канзас-Сити в 1981 году, когда балкон
отеля Skywalk ("Небесная прогулка") обрушился вместе с танцорами. Разрушение зданий
при землетрясении иногда происходит из-за резонансных колебаний, возникших благодаря
колебаниям земли с одной из собственных частот строения; именно это случилось с
многими зданиями во время землетрясения в Мехико 19 сентября 1985 года. Известен случай
крушения самолета, связанный с резонансными колебаниями крыльев, вызванных
колебаниями двигателей. Сообщалось, что во время одного из первых коммерческих реактивных
рейсов собственная частота вертикальных колебаний самолета, вызванных
турбулентностью, практически совпала с частотой колебаний системы, подобной системам, состоящим
из тела заданной массы, закрепленного на пружине. Оказалось, что такая система состояла
из головы пилота (тело заданной массы) и его позвоночника (пружина). Из-за возникшего
резонанса у пилота возникли проблемы с чтением приборов. Большие современные
коммерческие реактивные самолеты имеют другие собственные частоты, поэтому таких проблем
с резонансом больше не возникает.
3.6. Вынужденные колебания и резонанс 309
Моделирование механических систем
При разработке механических конструкций и систем всех видов обязательно ставится задача
избежать разрушительного действия резонансных колебаний. Часто самым важным шагом
в задаче определения собственной частоты колебаний системы является составление
дифференциального уравнения этих колебаний. Для этой цели, кроме второго закона Ньютона
F = та, иногда оказывается полезным закон сохранения энергии (как, например, при
выводе уравнения колебаний маятника в разделе 3.4). Часто используйугся следующие формулы
для кинетической и потенциальной энергии.
1. Кинетическая энергия Т = \mv2 тела массы га, двигающегося со скоростью v.
2. Кинетическая энергия Т = \1ш2 вращения тела с моментом инерции I с угловой
скоростью и.
3. Потенциальная энергия V = \ кх2 пружины с жесткостью к, сжатой или растянутой
на расстояние х.
• 4. Потенциальная энергия V = тдh тела массы т на высоте h над некоторым уровнем
(на котором V = 0) в постоянном гравитационном поле, т. е. если д можно считать
постоянным. »
Пример 4
Найдем собственную частоту колебаний однородного диска радиуса а
массой га, закрепленного на пружине жесткости к так, что он катится без
проскальзывания, как показано на рис. 3.6.5.
Решение Во введенных ранее обозначениях принцип сохранения энергии можно
записать в виде уравнения
\mv2 + \1ш2 + \кх2 = Е,
где общая механическая энергия системы Е постоянна. Поскольку v =
= aunl = та2/2 для однородного круглого диска, последнее уравнение
упрощается и его можно записать так:
\mv2 + \кх2 = Е.
Рис. 3.6.5. Диск, который катится
без проскальзывания
310
Глава 3. Линейные уравнения высших .порядков
Дифференцированием (v = х\ vf — х") получим
\тх'х" + кхх' = 0.
Разделив все слагаемые на %тх'9 получим
х" + —х = 0.
Зга
Таким образом, собственная круговая частота ujq = \j2k/{3m)\ она
в ^/2/3 « 0,8165 раз отличается от собственной частоты в случае
скольжения без трения. ■
Пример 5
Предположим, что машина колеблется вертикально так, как колебалось
бы тело массой т = 800 кг на пружине (с жесткостью к = 7 х 104 Н/м),
соединенное с амортизатором (с коэффициентом поглощения с = 3000Н-
•с/м). Предположим, что машина при отсоединенном амортизаторе едет
по волнистому дорожному покрытию, у которого амплитуда равна 5 см,
а длина волны — L — 10 м (рис. 3.6.6). При какой скорости движения
автомобиля возникнут резонансные колебания?
Решение Будем считать машину Ьдноколесной, как на рис. 3.6.7. Пусть x(t)
обозначает смещение вверх тела массой га относительно положения
равновесия; мы не будем учитывать дилу тяготения, т^к как она лишь смещает
положение равновесия (как в задаче 9 раздела 3.4)* Запишем уравнение
поверхности дороги в виде
27TS
у = a cos —- (а = 0,05 м, L = 10 м).
Li
A5)
При движении машины пружина растягивается на величину х — у. По
второму закону Ньютона F = та; значит,
тх" = — к(х — у),
Поверхность!
у = a cos
2ns
5 = 0
Рис. 3.6.6. Поверхность дороги
в примере 5 . {,
равновесия
Ш':ШШШШ^;
Рис. 3,6.7. "Одноколесная
модель" автомобиля
3.6. Вынужденные колебания и резонанс 311
т.е.
тх" + кх = ку. A6)
Если скорость машины равна v, то в уравнении A5) s = vt9 поэтому
уравнение A6) примет вид
тх" 4- кх = ка cos ——. A6')
Ju
Это дифференциальное уравнение описывает вертикальные колебания
автомобиля. Сравнивая его с уравнением D), мы видим, что автомобиль
совершает вынужденные колебания с круговой (циклической) частотой
ш = 2пу/Ь. Резонанс возникнет, если ш = ыо = у/к/т. Подставляя
численные данные, найдем скорость:
L Гк 10 /7х104 ,,ОЛ/ , ч
^2^Vm = 2^V-800-4'89(M/c);
это около 33,3 миль/ч (мы использовали переводной коэффициент 2,237,
чтобы перевести м/с в миль/ч). ■
Вынужденные затухающие колебания
В реальных физических системах всегда присутствует затухание, вызванное трением или
чем-нибудь еще. Общее решение хс однородного уравнения, соответствующего уравнению
► тх" Ч-сх7 4- кх = Focoso;t, A7)
даетеяравенством A8), A9) или B0) из раздела 3.4, в зависимости оттого, какое из неравенств
о > ссг = у/Акт, с = ссг или с < ссг выполняется. Конкретный вид общего решения
здесь не важен. Важно лишь то, что во всех случаях xc(t) —> 0 при t —> -f oo. Поэтому хс
будет переходной составляющей решения уравнения A7), т. е. той составляющей, которая
исчезает с течением времени, оставляя лишь частное решение хр.
Согласно методу неопределенных коэффициентов в уравнение A7) можно подставить
функцию
x(t) = Acosut + B,smwt.
После подстановки, приведения подобных и приравнивания коэффициентов при cosu;£
и sin wt9 получим два уравнения:
(к - ти2)А 4- сшВ - F0, -сшА 4- (Л - тш2)В = 0, A8)
найти решения которых не составит труда:
(к - mw2)F0 cwFp
(к -ти*J 4- (си;J' (к - тш2J + (сиJ' и;
Записав, как обычно, равенство
A cos ut + B sin о;* = C(cos o;t cos a 4- sin ut sin a) = С cos(wt — a},
312 Глава 3. Линейные уравнения высших порядков
видим, что установившиеся периодические колебания
xp(t) = Ccos(ut — a)
имеют амплитуду
С= Vх А2 + В2
F0
у/(к - тш2J + (си>J
B0)
B1)
Теперь из A9) следует, что sin a =
второй четверти. Поэтому
В
tga=-
В/С > 0, так что фазовый угол а лежит в первой или
cw
к — тш2
откуда
а
arctg-
сш
при 0 < а < 7г,
при к > тш29
B2)
к -*- ти2
i см 1 о
7г + arctg при к < muz
К к — гто1
(причем а = 7г/2 при к = гПш2).
Заметим, что если с > 0, то "вынужденная амплитуда", т. е. функция С(ш), заданная
формулой B1), всегда остается конечной (в отличие от того, что происходит в случае резонанса
при отсутствии затухания, т. е. когда частота и вынуждающей силы совпадает с собственной
частотой uq — \Jkjrri). Но вынужденная амплитуда может достичь максимума для
некоторого значения и. Тогда мы говорим о практическом резонансе. Для того чтобы увидеть,
когда возникает практический резонанс, нужно лишь построить график С как функции от
ш и найти глобальный максимум. Можно показать (задача 27), что если с ^ \/2fcm, то С —
монотонно убывающая функция от ш. Но при с < V2km амплитуда С достигает максимума
(т. е. возникает практический резонанс) при некотором значении и, меньшем, чем шо, а затем
она стремится к нулю при и; —► + оо. Отсюда следует, что в системе с затуханием происходят
вынужденные колебания, амплитуда которых
• велика при значении ш, близком к критической резонансной частоте;
• близка nFo/k, если и очень мало;
• очень мала, если и очень велико.
Пример 6
Найдем движение в переходном режиме и установившиеся
периодические колебания в системе, состоящей из тела заданной массы,
закрепленного на пружине, при наличии затухания с параметрам» га = 1, с — 2
и к = 26 под действием внешней силы F(t) = 82 cos4t при начальных
условиях х@) = биж;@) = 0. Исследуем также возможности
возникновения практического резонанса в данной системе.
Решение Результирующее уравнение движения х (t) = а^г(£L-ж8р(£)телаявляется
решением задачи Коши (задачи с начальными условиями)
х" + 2х + 26х = 82 cos4t; х@) = б, х'@) = 0.
B3)
3.6. Вынужденные колебания и резонанс 313
Вместо того чтобы просто применить общие формулы, выведенные ранее
в этом разделе, мы решим эту задачу заново. Сначала запишем
характеристическое уравнение:
г2 + 2г + 26 = (г + IJ + 25 = 0.
Теперь найдем его корни: г = — 1 ± 5г. Поэтому общее решение
соответствующего однородного уравнения имеет вид
хс(t) = e_t (ci cos bt 4 C2 sin bt).
Подставив в данное уравнение пробное решение
x(t) = A cos At 4 В sin At
и приведя подобные и приравняв коэффициенты при cos 4t и sin 4t,
получим систему уравнений
1CL4+ 8Б = 82,
-SA 4 10Б = 0,
решением которой являются числа А = 5 и В = 4. Поэтому общее
решение уравнения B3) можно записать в виде
x(i) = e-t(ci cos bt 4 C2 sin 5t) 4 5 cos 4t 4 4 sin 4t.
Теперь подставим начальные данные х@) = 6,ж;@) = 0 и найдем ci = 1
и С2 = —3. Следовательно, движение в переходном режиме и
установившиеся периодические колебания тела задаются уравнениями
#tr№ = e-t(cos5£ — 3sin5£)
и
/5 4
#sp(£) = 5cos4£ 4 4sin4£ = \/41 ( —== cos4t 4—р= sin4t
VV41 V41
= \/4lcosD£ — a),
где a = arctg (§) « 0,6747.
На рис. 3.6.8 изображены графики решения x(t) = xtT(t) 4 #Sp(£)
задачи Коши (задачи с начальными условиями)
х" 4 2х' 4 26х = 82cos4£, х@) = х0, х'{0) = 0 B4)
дляразличных значений хо = —20, —10,0,10 и 20 начального положения.
Ясно видно, что для переходной составляющей решения xtT (t) означают
слова "затухание с течением времени, в результате которого остается
лишь установившееся периодическое движение ж8р(£)'\ Действительно,
из-за того что xtT(t) —» 0 экспоненциально, всего через несколько циклов
полное решение x(t) и установившееся периодическое решение xsp(t)
практически неразличимы.
-
314
Глава 3. Линейные уравнения высших порядков
201
10-
-10 <
■20 i
*о = 20
//\\ЛЛЛ1ЛЖ^
* = XSp@
2 Л
/з
\ 4 /
/ i
5
Рис. 3.6.8. Решения задачи Коши (задачи с начальными
условиями) B4) при х0 - -20, -10,0» 10 и 20
Чтобы определить, возможен ли практический резонанс в данной
системе, подставим значения га = 1,с = 2и& = 26вB1). Получим, что
вынужденная амплитуда при частоте о; равна
82
ОД =
V676-48a>2 + u;4'
График С (и) изображен на рис. 3.6.9. Максимум амплитуды достигается
тогда, когда
-41 Dа;3 - 96а;) -164а;(а;2 - 24)
С'М =
F76 - 48а;2 + а;4K/2 F76 - 48а;2 4- а;4K/2
0.
Поэтому практический резонанс возникает при критическом значении
частоты и = л/24 (это немного меньше, чем критическая частота
Рис. 3.6.9, График зависимости амплитуды С от
внешней частоты о;
3.6. Вынужденные колебания и резонанс 315
шо = л/к/т = л/26 системы, состоящей из тела, закрепленного на
пружине, при отсутствии затухания). ■
3.6. Задачи
В задачах 1-6 выразите решение данной задачи Коши (задачи с начальными условиями) в виде
туммы двух колебаний (как в уравнении (Щ. Всюду штрихи обозначаю^ производные по времени
I В задачах 1-4 постройте интегральную кривую {график решения x(t)) таким образом, чтобы
чожно было определить и отметить (как на рис. 3.6.2) период колебания.
1. х" + 9х = 10cos2£; ж@) = ж'@) = 0 2. ж" + 4ж = 5sin3t; ж@) = х'@) = 0
3. х" + 100ж = 225 cos 5t + 300 sin 5t; ж@) = 375, x'@) = 0
4. x" + 25ж = 90cos4t; ж@) = 0, x'(Q) = 90
5. mx" + kx = Fo cosotf при us Ф ljq; x@) = xo, x'@) = 0
6. mx" + kx = Fo cos ut при us = ljq; x@) = 0, x'@) = vo
В задачах 7-10 найдите установившееся периодическое решение xsp(t) = С cos((jt — а) данного
уравнения тх" + сх' + kx = F(t) с периодической вынуждающей функцией F(t) с частотой и.
Затем для сравнения постройте графики xsp (t) и приведенной вынуждающей функции F\ (t) =
= F(t)/mu.
7. х" + 4ж' + 4ж = 10 cos 3t .8. x" + Зж' + Ъх - -4 cos 5t
9. 2x" + 2x' + x = 3 sin lOt 10. x" + 3x' + 3x = 8 cos 10£ + 6 sin lOt
В задачах 11-14 найдите (и постройте график) установившееся периодическое решение xsp(t) =
= Ccos(u;£ — а) данного дифференциального уравнения и той переходной составляющей решения
Xtx{t), которая удовлетворяет заданным начальным условиям.
И. х" + 4ж' + Ъх = 10 cos 3t; ж@) = х'@) = 0 !
12. х" + 6ж' + 13ж = 10sin5t; ж@) = ж'@) = 0
13. х" + 2х' + 26ж = 600 cos 10t; ж@) = 10, ж'@) = 0
14. х" + 8ж' + 25ж = 200 cos t + 520 sin t; x@) = -30, ж'@) = -10
В задачах 15-18 заданы параметры системы, состоящей из тела, закрепленного на пружине,
с амортизатором (с дифференциальным уравнением тх" + сх' + kx = Fo cos u;£). Исследуйте
возможность практического резонанса в этой системе. В частности, найдите амплитуду С (и)
установившихся периодических вынужденных колебаний с частотой ил Постройте график С(ш)
и найдите частоту практического резонанса ш (если таковая существует).
15. m = 1, с = 2, к = 2, F0 = 2 16. т = 1, с = 4, fc = 5, F0 = 10
17. т = 1, с = 6, fc = 45, F0 = 50 18. m = 1, с = 10, fc = 650, F0 = 100
19. Тело весом 100 фунтов (массой т — 3,125 слага (единиц массы в системе измерения фунт-
сила)) закреплено на конце пружины, которая растягивается на 1 дюйм под действием силы
в 100 фунтов. На тело действует сила Fo cos ut. При какой частоте (в герцах) возникнут
резонансные колебания? Затуханием пренебречь.
20. Стиральная машина с загрузкой спереди закреплена на толстой резиновой опоре, действующей
как пружина; под действием веса W = тд (где д — 9,8 м/р2) машины опора сжимается ровно
на 0,5 см. Когда барабан машины вращается со скоростью и радиан в секунду, он действует на
машину с вертикально направленной силой Fo cos ,ust ньютон* При какой скорости (измеренной
в оборотах в минуту) будут возникать резонансные колебания? Затуханием пренебречь.
ЗШ Глава^^Шиейные^0Штшя высших порядков
21. На. хщ0КШ\О h|i mi щрТГОп массой m на конце маятника (длиной L), присоединенное
к горизоталм^^^^жине (жесткости к). Предположим, что колебания тела настолько
малы, что "jij уцРгГи II II практически горизонтальной. Кроме того, затухание не учитывайте.
Выразит^лЙЙтвенную радиальную частоту f^o колебаний тела через Ь,к,гпи гравитационную
22. Тело массой m висит на конце провода, перекинутого через блок радиусом а с моментом
инерции / (рис. 3*6*11). К ободу блока присоединена пружина жесткостью к. Предположим,
что колебания тела настолько малы, что пружина остается практически горизонтальной. Кроме
того, трение не учитывайте. Выразите собственную радиальную частоту системы через га, а,
к, I и д.
к
Рис. 3.6.10. Система маятник
на пружине из задачи 21
Рис. 3.6.11. Система
задачи 22, состоящая из тела на
пружине с блоком
23. Здание состоит из двух этажей. Первый этаж стоит неподвижно на земле. Второй этаж имеет
массу m = 1000 слагов (единиц массы в системе фунт-сила) и весит 16 тонн C2 000 фунтов).
Эластичный каркас здания ведет себя как пружина, противостоящая горизонтальному
смещению второго этажа. Чтобы сместить второй этаж на 1 фут, необходимо подействовать на него
силой в 5 тонн в горизонтальном направлении. Предположим, что при землетрясении земля
колеблется с амплитудой Aq и круговой (циклической) частотой а;, действуя на второй этаж
здания с внешней силой F{t) = тАош2 sin ujt. (а) Какова (в герцах) собственная частота
колебаний второго этажа? (Ь) Если земля совершает одно колебание каждые 2,25 секунды
с амплитудой в 3 дюйма, какой будет амплитуда вынужденных колебаний второго этажа?
24. Тело, закрепленное на пружине, совершает незатухающие колебания. Предположим, что на
тело действует внешняя сила F(t) = Fo cos3 ujt. Покажите, что существуют два значения о;,
при которых возникает резонанс, и найдите их оба.
25. Найдите установившееся периодическое решение уравнения
mx" -f сх + кх = Fo sin u)t.
В частности, покажите, что оно такое, какого и следовало ожидать, исходя из формулы B0),
т. е. имеет тот же вид с теми же значениями С и и>, за исключением того, что sin(o;t — a)
необходимо заменить на cos(ut — a).
26. Дано дифференциальное уравнение
тх" -Ь сх + кх = Ео cos ujt -f Fo sin wt,
3.6. Вынужденные колебания и резонанс 317
в котором внешняя сила равна сумме двух вынуждающих сил, одна из которых представлена
слагаемым, содержащим косинус, а вторая — синус. Найдите установившееся периодическое
решение уравнения
xsp(t) = , ^ + F°2 cos(o;t - а - /5),
PW у/(к - гш2J + (со;J V H)
где а определено в уравнении B2), а /3 = arctg(Fo/Fo). (Указание. Сложите два
установившихся периодических решения уравнения, соответствующих отдельно Ео cos out и Fo sin ut
(см. задачу 25).)
27. Согласно уравнению B1), амплитуда вынужденных установившихся периодических колебаний
системы с уравнением тх" + ex' -f kx = Fo cos u;£ равна
ОД = F°
y/(k - тш2J + (со;J
(а) Пусть с ^ Ссг/л/2, где СсГ = у/4km. Покажите, что С монотонно убывает при возрастании
w. (Ь) Пусть с < СсТ/у/2. Покажите, что С достигает максимума (практический резонанс) при
yi
с2
U = Urn = \/ — ~ 2~5 < ^
28. Как было показано в этом разделе на примере системы, состоящей из тележки с маховиком,
несбалансированная вращающаяся часть механизма обычно действует с силой, амплитуда
которой пропорциональна квадрату частоты ш. (а) В дифференциальном уравнении
тх" 4- ex -f kx = mAuj2 cos ut
внешняя сила представлена слагаемым, аналогичным тому, которое имеется в уравнении A7).
Покажите, что амплитуда установившегося периодического решения этого дифференциального
уравнения задается формулой
( . mAuj2
у/(к - mw2J + (cwJ
(b) Предположим, что с2 < 2тк. Покажите, что максимум амплитуды достигается при частоте
ит, равной
- /А ( 2тк \
~ у m \2mk-c2)'
Поэтому резонансная частота в этом случае больше (в отличие от результата задачи 27), чем
собственная частота шо = у/к/т. (Указание. Найдите максимум квадрата С.)
Автомобильные колебания
В задачах 29 и 30 продолэ/сается изучение автомобиля, начатое в примере 5. Если амортизатор
подсоединен (т. е. О 0), то уравнение вертикальных колебаний примет вид тх"+сх'+кх — су1 4-
+ ку. Подставив уравнение поверхности дороги у = a sin ut в это дифференциальное уравнение,
получим
тх" -f сх + кх = Ео cos ujt + Fo sin ut,
где Ео = сша и Fo = ка.
318 Глава 3. Линейные уравнения высших порядков
29. Применив результат задачи 26, покажите, что амплитуда С установившихся периодических
колебаний автомобиля задается формулой
= а^к2 + (со;J
у/(к - тш2J + (со;J'
Поскольку о; = 2ttv/L, то это выражение дает зависимость С от скорости г> движения
автомобиля.
30. На рис. 3.6.12 изображен график амплитуды С (и) (как функции о;) при численных значениях,
приведенных в примере 5 (включая с = 3000 Н-с/м). Из графика видно, что при
постепенном ускорении автомобиля (из состояния покоя), амплитуда его начальных колебаний немного
больше 5 см. Максимальные резонансные колебания с амплитудой приблизительно 14 см
возникнут на скорости около 32 миль/час. Но на более высоких скоростях амплитуда уменьшится.
Проверьте сделанные на основе графика выводы, проанализировав поведение функции С (си).
В частности, найдите частоту практического резонанса и соответствующую амплитуду.
0 20 40 60 80 100
Скорость (миль в час)
Рис. 3.6.12. Амплитуда колебаний
автомобиля на ухабистой дороге
3.6. Приложение. Вынужденные колебания
Теперь рассмотрим вынужденные колебания в системе, состоящей из тела, закрепленного на
пружине, причем к телу подсоединен амортизатор. Такая система описывается уравнением
тх" + cxf + kx = F(t).
О)
Для упрощения выкладок положим га = р2, с = 2р, а к = p2q2 4-1, ще р > 0 и q > 0. Тогда
общим решением однородного уравнения, соответствующего уравнению A), будет функция
x6{t) = e~t/p(cx cos qt + с2 sin qt). B)
Пусть р = 5, q = 3. Исследуем поведение переходной составляющей решения и
установившегося периодического решения уравнения
252:" + Юж' + 226х = F(t), х@) = 0, х'@) = 0
C)
для нескольких различных примеров функции F(t). Чтобы самостоятельно получить
собственные аналогичные результаты, вы можете выбрать числа р и q так, чтобы выполнялись
неравенства 6^р^9и2^д^5.
3,6i Вынужденные колебания и резонанс 319
Исследование 1. Пусть периодическая внешняя сила задана функцией F(t) = 901 cos 3t.
Тогда, чтобы нарисовать график, изображенный на рис. 3.6ЛЗ, достаточно выполнить
следующую последовательность команд на входном языке системы MATLAB:
х = dsolve('25*D2x+10*Dx+226*x=901*cosC*t)',
'х@)=0, Dx@)=0' ) ;
х = simple(x);
syms t, xsp = cos C*t) + 30*sin C*t);
ezplot(x, [0 (\6*pi] ).,hold"on
ezplot(xsp, [0 6*pl])
Ясно видно, что (переходная составляющая плюс установившеесяпериодическое) решение
x(t) = cos 3t + 30 sin Ш + eTt/5 (- cos Ш - Щ- sin 3t)
быстро "приближается" к установившимся периодическим колебаниям xsp(t) = cos3£ 4-
+ 30sin3£.
40
20
н 0
-20
-40
l l l
" *sp@
Ul\ ««* *
~и У У У У У У У п
1 1 1
10
15
Рис. 3.6.13. Решение x(t) = xtr (£) 4- xsp (t) и
установившееся периодическое решение x(t) = #Sp(£) при
периодической внешней силе F(t) = 901 cos 3£
Исследование 2. В случае затухающей внешней силы s 4
F(t) = 900e-t/5cos3t
возникают слагаемые, подобные слагаемым в функции B), являющейся общим решением
соответствующего однородного уравнения. Тогда, чтобы нарисовать график, изображенный
на рис. 3.6.14, достаточно выполнить следующую последовательность команд на входном
языке системы Maple:
de2 := 25*diff(x(t),t,t)+10*diff(x(t),t)+226*x(t) =
900*exp(-t/5)*cosC*t);
dsolve({de2,x@)=0,D(x) @)=0}, x(t) ) ;
x := simplify (combine (rhs (%) , trig,) ) ;
С := 6*t*exp(-t/5); .
plot({x,C,-C},t=0.,8*Pi);
320 Глава 3. Линейные уравнения высших порядков
Решение
x(t) =6te~t/5sin3t,
как видно из графика, колеблется между кривыми х = ±6te~t^5. (Обратите внимание на
множитель t, который обусловлен резонансом.)
15
10
5
н 0
-5
-10
х 5 10 15 20 25
t
Рис. 3.6.14. Решение х(t) = 6te~t^5 sin 3£,
колеблющееся между кривыми x(t) = ±6£e-t/5 при затухающей
внешней силе F(t) = 900е~*/5со8 3£
Исследование 3. Пусть теперь осциллирующая затухающая внешняя сила описывается
уравнением
F(t) = 2700te~t/5cos3t.
Это еще более сложный случай. Тогда, чтобы нарисовать график, изображенный на
рис. 3.6.15, достаточно выполнить следующую последовательность команд на входном
языке системы Mathematica:
de3 = 25 х" [t] + 10 х' [t] +'226 x[t]
2700 t Exp[-t/5] Cos[3t]
soln = DSolve[{de3, x[0] == 0, x' [0]
x = First[x[t] /. soln]
amp = Exp[-t/5] Sqrt[Ct)A2 + (9tA2 -
Plot[{x, amp, -amp}, {t, 0, 10 Pi}];
На графике видно, что решение
x(t) =e~t/5 [3£cos£ + (9t2 - l)sin3t]
колеблется между огибающими кривыми
Т I I Г
== 0}, x[t], t]
1)л2]
3.7. Электрические цепи 321
200
10 15 20 25
t
Рис. 3.6.15. При внешней силе F(t) = 2700te~t/5 cos Ш
решение x(t) = e'^5[3tcost + (9t2 - l)sin3t]
колеблется между огибающими кривыми x(t) =
3.7. Электрические цепи
В этом разделе рассматриваются RLC-цепи, являющиеся важной составной частью более
сложных электрических цепей и сетей. В состав таких цепей, как показано на рис. 3.7.1,
входят следующие элементы:
резистор (называемый часто также сопротивлением), сопротивление которого равно
Rom;
катушка (называемая часто также индуктивностью), индуктивность которой равна
L генри;
конденсатор (называемый часто также емкостью), емкость которого равна С фарад.
Эти элементы подсоединены к источнику электродвижущей силы (например, к батарее или
к генератору), который в момент времени t в цепь подает напряжение в E(t) (вольт). Пусть
неиерь цепь замкнута, т. е. переключатель на рис. 3.7.1 включен. Обозначим силу тока в сети
в момент времени t через I(t) (ампер), а заряд конденсатора — через Q(t) (кулон). Тогда
Рис. 3.7.1. Электрическая цепь, состоящая из резистора,
катушки и конденсатора
322 Глава 3. Линейные уравнения высших порядков
функции Q и I удовлетворяют следующему уравнению:
Мы в таких случаях всегда будем пользоваться системой МКС (метр-килограмм-секунда),
в которой время измеряется в секундах.
Согласно элементарным законам электричества, падение напряжения на указанных
элементах приведено в таблице на рис. 3.7.2. Для исследования поведения цепи,
изображенной на рис. 3.7.1, мы будем использовать эту таблицу и второй закон Кирхгофа:
/
(Алгебраическая) сумма падений напряжений на элементах контура
цепи равна напряжению, приложенному к данной цепи.
Как следствие, сила тока и заряд в простой цепи, состоящей из резистора, катушки
и конденсатора (рис. 3.7.1), удовлетворяют основному уравнению цепи
>► L<E.+RI+^Q = E{t). B)
Подставив A) в уравнение B), получим линейное дифференциальное уравнение второго
порядка
LQ" + RQf + ~Q = E(t) C)
О
относительно заряда Q(t) при известном напряжении E(t).
В большинстве практических задач интерес представляет сила тока J, а не заряд Q.
Поэтому продифференцируем обе части уравнения C), подставим I вместо Q' и получим
> LI" + RI' + ^I = E'(t). D)
Элемент
>«»**'? •
Катушка
Резистор
Конденсатор
щщщщщтттщтттттмттшщтщтт
Падение
напряжения на элементе
Ldt
RI
ь«
Рис. 3.7.2. Таблица падения
напряжения на элементах цепи
Мы не будем требовать от читателя каких-либо предварительных познаний в теории
электрических цепей. Можно считать, что резистор, катушка и конденсатор представляют
собой "черные ящики", поведение которых полностью определяется (постоянными)
параметрами Л, I и С, Батарея или генератор полностью определяется напряжением E(t)>
которое это устройство генерирует. Если цепь разомкнута (переключатель выключен), то
3.7. Электрические цепи 323
в цепи тока нет; а если цепь замкнута (переключатель включен), то сила тока равна /(£),
а заряд конденсатора — Q(t). Об этих постоянных и функциях необходимо знать лишь то,
что они удовлетворяют уравнениям A)-D) нашей математической модели цепи, состоящей
из резистора, катушки и конденсатора. И об электричестве можно узнать многое, изучая эту
математическую модель.
Соответствия механических и электрических систем
Поразительно, что уравнения C) и D) имеют точно ту же форму, что и уравнение
> тах" + сх' + kx = F(t), E)
представляющее собой уравнение движения системы (состоящей из тела, закрепленного на
пружине с амортизатором), на которую действует внешняя сила F(t). Таким образом, между
механическими и электрическими системами существует очень важная аналогия. В
таблице на рис. 3.7.3 приведено важное соответствие параметров механических и
электрических систем. Как следствие, большинство результатов раздела 3.6, полученных для
механических систем, применимы и к электрическим цепям. То, что одно и то же
дифференциальное уравнение служит математической моделью для таких разных физических систем,
впечатляюще иллюстрирует важную объединяющую роль математики в исследовании
природных явлений. Точнее, соответствие величин, указанное на рис. 3.7.3„можно использовать
для построения электрической модели любой заданной механической системы, причем для
такого построения достаточно использовать доступные электрические элементы.
Поведение механической системы можно предсказать с помощью точных, но достаточно простых
измерений параметров электрической модели. Это особенно полезно, если создание
механической системы дорого или если измерение ее параметров (например, скоростей или
смещений) связано со сложностью, неточностью либо просто опасно. Эта идея лежит в
основе аналоговых компьютеров—электрических моделей механических систем. С помощью
аналоговых компьютеров были смоделированы первые ядерные реакторы для
промышленных электростанций и силовых установок подводных лодок до их создания.
Обычно напряжение переменного тока равно E(t) = Eq smut. В этом случае
уравнение D) примет вид
Ы" + RI' + —I = ljEo cos (jt. F)
О
Так же как и при рассмотрении механической системы, состоящей из тела, закрепленного
:на пружине, с амортизатором, на которую действует внешняя периодическая сила, пред-
Механнческая система Электрическая система
Масса т Индуктивность L
Коэффициент затухания с Сопротивление R
Жесткость пружины к Величина 1/С, обратная емкости
Смещение х Заряд Q (в C) (или сила тока / в D)))
Сила F Электродвижущая сила Е (или ее производная Е')
Рис. 3.7.3. Соответствие механических и электрических параметров
324 Глава 3. Линейные уравнения высших порядков
ставленная простой гармоникой, решение уравнения F) можно представить в виде суммы
переходного тока (тока при переходном процессе, или тока неустановившегося
режима) Jtr, стремящегося к нулю при t —» +oo (при условии, что все коэффициенты в
уравнении F) положительны, так что корни характеристического уравнения имеют отрицательные
действительные части), и установившегося периодического тока /sp. Иными словами,
J = Jtr + V G)
Напомним (раздел 3.6, уравнения A9)—B1)), что установившееся периодическое решение
уравнения E) при F(t) = Fo cos ut равно
( v _ Fq cosjujt - a)
Xsp[}" уР^РТЩ^'
где
CUJ
к — muS1
a = arctg ;r, 0 S a S 7Г.
Заменив в этой формуле т на L, с на R, к на 1/С и Fo на шЕо, получим формулу для
установившегося периодического тока
/.„«) = ,£°C°S("'-a) ., (8)
\IR2 + ("L-JcJ
в которой фазовый угол
a = arctg _ 2, О S a S тг. (9)
Реактивное сопротивление, или реактивность, и импеданс
Выражение в знаменателе в формуле (8)
Z=Jb?+ Lb - -±Л (Ом), A0)
называют полным сопротивлением, кажущимся сопротивлением, волновым
сопротивлением или импедансом цепи, а иногда — просто сопротивлением. Тогда
установившийся периодический ток равен
Eq
JspOO = -^ cos{ujt - а), A1)
а его амплитуда
h = Щ, A2)
что напоминает закон Ома I *= E/R.
3.7. Электрические цепи 325
В уравнении A1) установившийся периодический ток представляет собой косинусоиду,
в то время как напряжение на входе E(t) = Eq sin ut — синусоиду. Чтобы представить Jsp
в виде синусоиды, введем реактивное сопротивление, или реактивность
s = "L-^c-
A3)
Тогда Z = y/R2 4- S2. Из уравнения (9) видно, что а такое, как изображено на рис. 3.7.4,
причем угол задержки 8 = а — \ъ. Теперь из уравнения A1) получаем
hp (t) — — (cos a cos cut 4- sin a sin ut) = ,
Следовательно,
к-
Eq
S R . >
■— coscjt 4- -= smut
Z Z j
= — (cos 8 sin cut — sin 8 cos cut).
Z
IsP(t)
Eq
sin(ujt — 8),
A4)
где
x 5 x LCuj2-1
* = arctg- = arctg^^.
A5)
Отсюда наконец получим временную задержку (запаздывание во времени) 8/и (в
секундах) установившегося периодического тока /sp от напряжения на входе (рис. 3.7.5).
Рис. 3.7.4. Реактивное сопротивле- Рис. 3.7.5. Отставание тока по вре-
ние и угол задержки мени от напряжения на входе
326 Глава 3. Линейные уравнения высших порядков
Задачи Коши (задачи с начальными условиями)
В задачах, где требуется найти кратковременный ток, обычно заданы начальные значения
1@) и <2@). Поэтому сначала необходимо найти /'@). Для этого подставим t = 0 в
уравнение B). Получим уравнение
Ы'@) + RI@) + ^Q(O) = £7@), A6)
которое позволяет выразить /'@) через начальные значения тока, заряда и напряжения.
Пример 1
Рассмотрим RLC-цсиъ (т. е. цепь, состоящую из резистора, катушки и
конденсатора), у которой R = 50 ом (Q), L = 0,1 генри (Гн) иС = 5х 10~4
фарад (Ф). В момент времени t — 0, когда значения 1@) и Q@)
равны нулю, к цепи подключили генератор переменного тока напряжением
110 В и частотой 60 Гц. Найдите силу тока в цепи и отставание во времени
установившегося периодического тока от напряжения.
Решение Если частота равна 60 Гц, то ш = B7г)F0) рад/с, т. е. приблизительно
377 рад/с. Поэтому E(t) — 110 sin 3772 (будем считать это равенство
точным, а не приблизительным). Дифференциальное уравнение F) в этом
случае примет вид
@,1O" + 507' + 2000/ = C77)A10) cos377t.
Подставив в уравнение A0) данные значения R,L,Chlj = 377, получим
импеданс: Z = 59,58 Q. Поэтому амплитуда установившегося
периодического решения
ПО (вольт) л ПА/Г
/о=59да^ = 1,846ампер(А)-
Подставив эти же данные в уравнение A5), получим синус фазового угла,
а затем найдем и сам угол:
S = arctg@,648) = 0,575.
Поэтому отставание по времени тока от напряжения равно
1 = ^=0,00,50,
и ой
а установившийся периодический ток равен
78р = A,846) sinC77* - 0,575).
Характеристическое уравнение @,1)г2 + 50г + 2000 = 0 имеет два
корня п « —44 и Г2 ~ —456. Используя эти приближенные значения,
запишем общее решение в виде
I(t) = cie~44t 4- с2е~АШ + A,846) sinC77£ - 0,575),
3.7. Электрические цепи 327
Пример 2
его производная
I'(t) = -44cie4t - 456с2е-456* + 696cosC77t - 0,575).
Поскольку 1@) = <2@) = 0, из уравнения A6) получим, что и/'@) = 0.
Подставив эти начальные данные, получим систему уравнений
J@J = ci+c2-l,004 = 0,
/'(О) = -44ci - 456с2 4- 584 = 0;
она имеет решение с\ = —0,307, с2 = 1,311. Поэтому переходную
составляющую решения можно записать в виде
ItT(t) = (-0,307)е4* + A,311)е-456*.
Заметим, что после одной пятой секунды |/tr@,2)| < 0,000047 А (что
сравнимо по величине с током, протекающим в одном нервном волокне
человека). Такое малое значение тока показывает, что переходная
составляющая решения действительно исчезает очень быстро. ■
Предположим, что RLC-цепь из примера 1 с теми же начальными данны-
ми 7@) = Q@) = 0вмомент£ = 0 подключается к батарее с постоянным
напряжением 110 В. Найдем ток в цепи.
Решение Поскольку теперь E(t) = 110, из уравнения A6) получим
,'(», = « = Н2 = П00(А,С),
так что дифференциальное уравнение принимает вид
@,1)/" + 50/' + 2000/ = E'(t) = 0.
Его общее решение совпадает с общим решением однородного
уравнения, найденным в примере 1:
/(t)=Cle-44'+c2e-456t.
Решив систему уравнений
/@) = ci + с2 = 0,
/'@) = -44ci - 45бс2 = 1100,
получим с\ — —с2 = 2,670. Отсюда находим
/(t) = B,670)(e-44t-e-456t).
Заметим, что I(t) -+ 0 при t -+ +oo несмотря на то, что напряжение
постоянно. ■
328 Глава 3. Линейные уравнения высших порядков
Электрический резонанс
Снова вернемся к дифференциальному уравнению F), соответствующему
синусоидальному напряжению на входе E(t) = Eq sin out. Мы знаем, что амплитуда установившегося
периодического тока равна ,
/о = § = Е° A7)
!В? +
(-£
График /о как функции от и, при типичных значениях R, L, С и Ер изображен на рис. 3.7.6.
Функция /о достигает максимального значения при иш = 1 / VbC, а затем стремится к нулю
при и —> +оо. Критическая частота и>т является резонансной частотой цепи.
/Г- /п =
\
V^2 + K-^cJ
Рис. 3.7.6. Зависимость /о от частоты
В разделе 3.6 была подчеркнута важность избежания резонанса в большинстве
механических систем (примером механической системы, в которой резонанс приветствуется,
является виолончель). Многие же электрические приборы, в отличие от механических,
правильно работают только при наличии резонанса. Ярким примером служит радио. Сильно
упрощенной моделью цепи настройки радио является рассмотренная нами RLC-цепъ (т. е.
цепь, состоящая из резистора, катушки и конденсатора). Ее индуктивность L и
сопротивление R постоянны, но емкость С изменяется, когда вы выбираете на шкале настройки нужную
частоту.
Предположим, что мы хотим поймать радиостанцию, которая вещает на частоте ш и таким
образом создает напряжение E(t) = Eq sin ut на входе контура настройки радио.
Полученный установившийся периодический ток /sp в контуре настройки поступает на усилитель,
а затем — на динамик. Громкость звука, который мы слышим, приблизительно
пропорциональна амплитуде Iq силы тока Isp. Чтобы услышать выбранную станцию (с частотой
вещания ш) громче всего и одновременно "отстроиться" от станций, которые вещают на других
частотах, нужно выбрать С так, чтобы максимизировать Iq. Однако поскольку в
уравнении A7) мы считаем ш постоянной, изменять можно только один единственный параметр С.
Сразу же без вычислений видно, что /о максимально при
иными словами, максимум достигается при
3.7. Электрические цепи 329
Поэтому при настройке, плавно вращая ручку, мы устанавливаем емкость, приблизительно
равную этому значению.
Таким образом работали старые ламповые радиоприемники. Современные АМ-прием-
ники имеют более сложную конструкцию. В них используется пара конденсаторов
изменяемой емкости. Первый позволяет настроить частоту так, как уже было описано; второй
регулирует частоту сигнала, который генерирует сам радиоприемник, причем поддерживает
ее на уровне, который приблизительно на 455 килогерц (кГц) выше желаемо*!.
Результирующее биение с частотой 455 кГц (эта частота называется промежуточной частотой) затем
усиливается в нескольких каскадах. Преимуществом такого метода является то, что
несколько ftLC-цепей в каскадах усилителя легко сконструировать так, чтобы они резонировали
при частоте 455 кГц, подавляя другие частоты. В результате значительно повышается
селективность (избирательность, избирательная способность) радиоприемника и достигается
больший коэффициент усиления принимаемого сигнала.
3.7. Задачи
В задачах 1-6 рассматривается RL-цепъ, в которой последовательно включен резистор с
сопротивлением R Ом, катушка с индуктивностью в L генри (рис. 3.7.7) и источник электродвижущей
силы (ЭДС), но конденсатор отсутствует. В этом случае уравнение B) сводится к линейному
уравнению первого порядка
Ы' + RI = E(t).
Ф е>
I Z 2 S
Переключатель <
I w\ '
R
Рис. 3.7.7. Цепь в задачах 1 -6
1. Предположим, что в цепи на рис. 3.7.7 L — Ъ Гн, R = 25 П, а источник ЭДС Е — батарея
с постоянным напряжением 100 В. Предположим также, что переключатель находится в
положении 1 уже долгое время, т. е. в цепи течет установившийся ток 4 А. В момент времени t = 0
переключатель устанавливают в положение 2, так что 1@) = 4 и Е = 0 для t ^ 0. Найдите
щ.
2. Рассмотрим ту же цепь, что и в примере 1. Предположим, что вначале переключатель находится
в положении 2, но в момент времени t = 0 его переключают в положение 1 так, что 1@) = 0
и Е = 100 для t ^ 0, Найдите I(t) и покажите, что I(t) —*• 4 при t —► +оо.
3. Предположим, что батарею в задаче 2 заменили генератором переменного тока с напряжением
E(t) = 100cos60t вольт. Считая, что все остальное осталось неизменным, найдите /(£).
4. Рассмотрим цепь, изображенную на рис. 3.7.7. Пусть переключатель находится в положении 1
и L = 2, R = 40, E(t) = 100e_lot, 1@) = 0. Найдите максимальное значение силы тока для
t^0.
5. Рассмотрим цепь, изображенную на рис. 3.7.7. Пусть переключатель установлен в положение 1
и E(t) = 100e0t cos60t, R = 20, L = 2, a /@) = 0. Найдите I(t).
330 Глава 3. Линейные уравнения высших порядков
6. Рассмотрим цепь, изображенную на рис. 3.7.7. Пусть переключатель установлен в положение 1
и L = 1, R = 10, a E(t) = 30 cos 60* + 40 sin 60*. (а) Подставьте Jsp(*) = A cos 60* + В sin 60*,
затем определите значения А и В и, наконец, найдите ток Jsp в установившемся режиме цепи.
(Ь) Запишите решение в виде isP(*) = Ccos(cj* — a).
В задачах 7-10 рассматривается RC-цепъ, изображенная на рис. 3.7.8. Она состоит из резистора
с сопротивлением R Ом, конденсатора емкостью С фарад, переключателя и источника ЭДС,
но в ней нет катушки. Подставив L — 0 в уравнение C), получим линейное дифференциальное
уравнение первого порядка
относительно заряда Q = Q(t) на конденсаторе в момент времени *. Заметим, что /(*) = Q'(t).
Рис. 3.7.8. Цепь в задачах 7-10
7. (а) Найдите заряд Q(t) и силу тока /(*) в данной цепи, если E(t)~Eo (постоянное напряжение,
которое обеспечивает батарея) и переключатель замыкает цепь в момент времени * = 0, т. е.
<2@) = 0. (Ь) Покажите, что
lim QCt) = ЕоС и
t—>-4-oo
lim J(*) = 0.
10
8. Предположим, что в цепи на рис. 3.7.8 R = 10, С = 0,02, Q@) = 0, a E(t) = 100e~5t (вольт).
(а) Найдите Q(t) и /(*). (Ь) Найдите максимальное значение заряда на конденсаторе при * ^ 0
и момент времени, когда оно достигается.
9. Предположим, что в цепи на рис. 3.7.8 R = 200, С = 2,5 х 10, Q@) = 0, a E(t) =
= 100 cos 120*. (а) Найдите Q(t) и /(*). (Ь) Какова амплитуда тока в установившемся режиме?
В момент времени * = 0 переключатель замыкает ЯС-цепь, показанную на рис. 3.7.8, и
источник ЭДС, генерирующий напряжение E(t) = Eq cos cj*, включается в эту ЛС-цепь. Пусть
Q@) = 0. Подставив QSp(*) = Acoscj* + В smut в дифференциальное уравнение, покажите,
что ток через конденсатор в установившемся режиме периодических колебаний равен
Q8P(*)
EqC
у/1 + uj2R2C2
cos(cj* — 0),
где 0 = aj:ctg(ujRC).
В задачах 11-16 заданы параметры RLC-цепи, причем входное напряжение равно E(t). Используя
подходящее значение ш, подставьте
hj>(t) = A cos ujt + Bsinu>*
в уравнение D) и найдите установившийся периодический ток в виде /sp(*) = /о sin(o;* — 5).
11. R = 30 П, L = 10 Гн, С = 0,02 Ф; E(t) = 50sin2* В
3.8. Краевые задачи и собственные значения 331
12. R = 200 Q, L = 5 Гн, С = 0,001 Ф; E(t) = 100 sin 10t В
13. R = 20 Q, L = 10 Гн, С = 0,01 Ф; £(t) = 200 cos 5* В
14. R = 50 Q, L = 5 Гн, С = 0,005 Ф; E(t) = 300 cos 100* + 400 sin lOOt В
15. R = 100 Q, L = 2 Гн, С = 5 x 10 Ф; £(t) = 110sin607rt В
16. R = 25 Q, L = 0,2 Гн, С = 5 x 1Q Ф; £(t) = 120cos377t B.
В задачах 17-22 описаны RLC-цепи с входным напряжением E(t). Найдите силу тока I(t), зная
начальные данные: силу тока (в амперах) и заряд конденсатора (в кулонах).
17. R = 16 Q, L = 2 Гн, С = 0,02 Ф; E(t) = 100 В; 1@) = 0, Q@) = 5
18. R = 60 О, L = 2 Гн, С = 0,0025 Ф; E(t) = ЮОе"* В; 7@) = 0, Q@) = 0
19. R = 60 О, L = 2 Гн, С = 0,0025 Ф; E(t) = ЮОе0* В; 1@) = 0, Q@) = 1.
5 задачах 20-22 постройте графики установившегося периодического тока Iap(t) и общего тока
I(t) = Iep(t) + Itr(t).
20. Цепь и входное напряжение как в задаче 11, причем 1@) = 0 и Q@) = 0.
21. Цепь и входное напряжение как в задаче 13, причем 1@) = 0 и Q(Q) = 3.
22. Цепь и входное напряжение как в задаче 15, причем 1@) — 0 и Q@) = 0.
23. Рассмотрим LC-цепь, т.е. i^LC-цепь, в которой сопротивление резистора R = 0. Пус^ь
напряжение на входе E(t) — Ео sin ut. Покажите, что при некоторой резонансной частоте будут
возникать неограниченные колебания силы тока. Выразите эту частоту через L и С.
24. Раньше было сказано, что если R, L и С положительны, то любое решение уравнения Ы" -f
+ RI' + I/C — 0 является переходной составляющей решения, т. е. оно стремится к нулю при
t —> +оо. Докажите это.
25. Докажите, что амплитуда /о установившегося периодического решения уравнения F)
максимальна при частоте ш = 1/y/LC.
3.8. Краевые задачи и собственные значения
Теперь вы знаете, что решение линейного дифференциального уравнения второго порядка
однозначно определяется двумя начальными условиями. В частности, единственным
решением задачи с начальными условиями
У" + РШ + q{*)y = 0; у (а) = 0, у'(а) = 0 A)
является тривиальное решение у (х)=0. В большей части главы 3 так или иначе используется
единственность решения задачи с начальными условиями для линейного уравнения (которая
гарантируется теоремой 2 из раздела 3.2).
Теперь мы увидим, что для задачи
У" + Р(х)у' + q(x)y = 0; у (а) = 0, у(Ъ) = 0, B)
ситуация совершенно иная.
Разница между задачами A) и B) состоит в том, что в B) два условия взяты в двух
разных точках а и Ь, причем для определенности пусть а < Ь. В задаче B) мы должны
найти решение дифференциального уравнения на интервале (а, Ь)9 которое удовлетворяет
условиям у(а) = Ои у(Ъ) = 0 на концах интервала. Такая задача называется краевой,
332 Глава 3. Линейные уравнения высших порядков
или задачей с граничными условиями. Примеры затруднений, которые могут возникать
в краевых задачах, приведены в примерах 1 и 2.
Пример 1
Пример 2
Рассмотрим краевую задачу
|/" + 3|/ = 0; 2/@) = 0, 2/@ = 0. C)
Общим решением данного дифференциального уравнения является
функция
у(х) = A cos xVs + В sin xVs.
Из краевых условий следует, что
2/@) = А = 0 и 2/(тг) = Б sin тг\/3 « (-0,7458)Б = 0,
откуда Б = 0. Поэтому единственным решением краевой задачи C) будет
тривиальное решение у(х) = 0; в этом нет ничего удивительного. ■
Рассмотрим краевую задачу
2/" + 42/ = 0; 2/@) = 0, у(тг) = 0. D)
Общим решением дифференциального уравнения является функция
у(х) = A cos 2x + В sin 2x.
Из краевых условий следует, что 2/@) = А = 0 и
2/(тг) = Acos2?r + £sin27r = Б • 0 = 0.
Независимо от значения В, условие у(тг) = 0 автоматически
выполняется, так как sin 27г = 0. Поэтому функции
у(х) = Bsin2x
являются решениями краевой задачи D) для всех значений В. Это пример
краевой задачи, имеющей бесконечно много нетривиальных решений. ■
Задачи на собственные значения
Примеры 1 и 2 скорее не исключения, а типичные ситуации для краевых задач, таких как
задача B): задача на собственные значения очень часто может не иметь нетривиальных
решений или иметь их бесконечно много. Заметим, что обе задачи C) и D) можно записать
в виде
> у"+р(х)у' + Xq{x)y = 0; у (а) = 0, у(Ъ) =''0, E)
где р(х) = 0, q(x) = 1, а = 0йЬ = 7г. Число А — параметр задачи (он не имеет никакого
отношения к параметрам, рассмотренным в разделе 3.5). Если мы возьмем А = 3, то получим
уравнение C); при А = 4 мы получим уравнение D). Примеры 1 и 2 показывают, что ситуация
3.8. Краевые задачи и собственные значения 333
в краевой задаче с параметром может (и, в большинстве случаев это так и есть) сильно
зависеть от конкретного численного значения параметра.
Краевая задача с неким параметром, скажем, Л, например краевая задача E), называется
задачей на собственные значения. В задаче на собственные значения ставится вопрос: при
каких (действительных) значениях параметра Л существует нетривиальное (т. е. ненулевое)
решение краевой задачи? Такое значение А называется собственным, или
характеристическим числом, или значением данной задачи. Поэтому можно сказать, что в примере 2 мы
убедились, что Л = 4 является собственным числом краевой задачи
у" + Ху = 0; 2/@) = 0, у(тг) = 0.
F)
Однако из рассуждений, проведенных в примере 1, следует, что А = 3 не является
собственным числом этой задачи.
Предположим что Л* — собственное число задачи E), а у* — нетривиальное решение
задачи, получающейся после подстановки этого собственного числа, т. е. задачи
у" + p(x)yfk + \*q(x)y* = 0 и у*(а) = 0, j/*(ft) = 0.
Тогда у* называется собственной функцией, соответствующей собственному числу Л*.
Таким образом, в примере 2 мы видели, что у* (ж) = sin2x (как и функция sin2x,
умноженная на произвольную постоянную) является собственной функцией, соответствующей
собственному числу А* = 4.
В соответствии с общим определением, задача E) является однородной в том смысле, что
любая собственная функция, умноженная на любую постоянную, также является
собственной функцией (конечно, соответствующей тому же собственному числу). Иными словами,
если у — у* (х) удовлетворяет задаче E) с собственным значением Л = А*, то же самое верно
и для су*(х) для любой постоянной с. Можно доказать (при определенных ограничениях на
функции (коэффициенты) р и q), что любые две собственные функции, соответствующие
одному собственному значению, являются линейно зависимыми.
Пример 3
Найдем собственные значения и соответствующие им собственные
функции краевой задачи
y" + Xy = 0; y@) = 0, y(L) = 0 (L>0).
G)
Решение Необходимо проверить все возможные (действительные) значения А —
положительные, нулевое и отрицательные.
Если А = 0, то уравнение примет вид уп = 0. Его общее решение
у(х) = Ах + В.
Тогда из краевых условий у@) = 0 = y(L) непосредственно следует, что
А = В = 0. Поэтому единственным решением в этом случае является
тривиальное — функция у(х) = 0. Следовательно, А = 0 не является
собственным значением задачи G).
Если А < 0, положим А = —а2 (где а > 0). Тогда дифференциальное
уравнение примет вид
у" - а2у = 0.
334 Глава 3. Линейные уравнения высших порядков
Его общее решение
у(х) = с\еах + С2е~ах = Л cosh ax -f В sinh ах,
где А = с\ + С2 и В = с\ — С2. (Напомним, что cosh ах = (еах + e~ax)/2
и что sinh ах = (еаж — е~ах)/2.) Из условия 2/@) = 0 следует, что
у@) = Acosh0 + Bsinh0 = А = 0,
поэтому у(х) = В sinh ах. Нотогдаиз второго краевого условия y(L) = 0
следует, что y(L) = BsinhaL = 0. Поэтому В = 0, так как a ^ 0
и sinh х = 0 только для х = 0 (посмотрите на графики у = sinh хиу =
= cosh х, изображенные на рис. 3.8.1). Поэтому единственным решением
задачи G) в случае Л < 0 является функция у = 0. Из этого следует, что
у данной задачи нет отрицательных собственных чисел.
\
\
\
у = cosh х \
(олГ
у = sinh х 1
У 1
X
Рис. 3.8.1. Графики гиперболического
синуса и гиперболического косинуса
Осталось проверить лишь случай А = а2 > 0 для некоторого а > 0.
В этом случае дифференциальное уравнение примет вид
у" + а2у = 0.
Его общее решение
у[х) = A cos ax + В sin ax.
Из условия у@) = 0 следует, что А = 0, поэтому з/(х) = В sin ax. Из
условия у (L) = 0 следует, что
y(L) = BsinaL = 0.
3.8. Краевые задачи и собственные значения 335
Возможно ли это при В Ф 0? Да, но только если aL нацело делится на 7г,
т. е. при
Q.L = 7Г, 27Г, 37Г, . . . , П7Г, . . . ,
, /
или при
2 _ тг^ 4тг^ 9тг^ nV
£2' L2 ' L2 ' "' L2 '
Таким образом, мы установили, что задача G) имеет бесконечную
последовательность положительных собственных чисел
2 2
An = ^, n = 1,2,3,..:. (8)
При J5 = 1 собственная функция, соответствующая собственному
значению Лп, равна
717ГХ
уп(х) = sin —-, п= 1,2,3,.... (9)
Пример 3 иллюстрирует общую ситуацию. В соответствии с теоремой, точная
формулировка которой будет дана в разделе 10.1, при условии, что q(x) > 0 на интервале [а, Ь]9
у задачи E) существует возрастающая расходящаяся последовательность
Ai < Л2 < Аз < • • • < Лп < • • • —> +оо
собственных чисел. Это остается верным и в более общей постановке задачи на
собственные значения, в которой краевые условия содержат не только значения у, но и значения
производной у':
y"+p(x)y' + \q(x)y = 0;
aiy(a) + a2y'(a) = 0, blV{b) + Ъ2у'{Ъ) = 0,
где oi, с&2, Ь\ и Ь2 — заданные постоянные. При а\ = 1 = Ь2 и а2 = 0 = Ъ\ получим задачу из
примера 4 (в которойр(х) = 0 и q(x) = 1, как и в предыдущем примере).
Пример 4
Найдем собственные значения и собственные функции задачи
y" + Aj/ = 0; 2/@)= 0, y'(L) = 0. A1)
Решение Рассуждая так же, как и в примере 3, можно показать, что собственные
значения (если они есть!) могут быть только положительными. Положим
А = а2 > 0 (а > 0). Тогда дифференциальное уравнение примет вид
у" + а2у = 0,
его общим решением является функция
у(х) = A cos ах 4- В sin ax.
336 Глава 3. Линейные уравнения высших порядков
Из условия 2/@) = 0 следует, что А = 0, поэтому
у(х) — В sin ах и у\х) = Ва cos ах.
Второе граничное условие yf{L) = 0 дает, что
у'{Ь) = Ва cos olL = 0.
При Б^О это выполняется, только если aL равно произведению целого
положительного нечетного числа на 7г/2:
тг Зтг Bп - 1)тг
2' Т' "' 2 ' ""'
в этом случае
^_ 9тг^ Bп - 1Jтг2
4L2' 4L2' •"' 4L2 ' •••"
Собственная функция задачи A1), соответствующая n-му собственному
числу Ап, равна
- ч Bп-1J7г2 , N . Bп-1)тгх
An = V 4L2; и yn(x)=smi 2L~" ( }
дляп = 1,2,3, ■
Общий метод определения собственных чисел в задаче A0) вкратце описан ниже.
Сначала запишем общее решение дифференциального уравнения в виде
у = Ауг(х, А) + Ву2(х, А).
Мы пишем yi(х, А), так как у\ и у2 зависят от А. В примерах 3 и 4
2/i(х) — cos ах = cosxVa и У2(х) = sin ах = sinxVX
Затем попытаемся удовлетворить двум краевых условиям. Заметим, что они линейны по у
и у\ а значит также и по А и В. Приведя подобные (просуммировав коэффициенты) при А
иВв двух уравнениях, мы получим систему уравнений
ai(A)A + A(A)B = 0,
a2(A)A + /?2(A)£ = 0. l ;
Теперь А будет собственным значением тогда и только тогда, когда у системы A3) есть
нетривиальное решение (хотя бы одно из чисел Л и В не равно нулю). Но однородная
система линейных уравнений имеет нетривиальное решение только тогда, когда определитель,
составленный из ее коэффициентов, равен нулю. Поэтому собственные числа задачи A0)
являются (действительными) решениями уравнения
D(X) = ai(A)ft(A) - а2(А)/?!(А) = 0. A4)
Возможно, решить это уравнение в явном виде не удастся. В этом случае можно использовать
приближенные численные методы, такие как метод Ньютона.
Задача на собственные значения наиболее интересна благодаря своим многочисленным
применениям в физике. В оставшейся части этого раздела мы рассмотрим три таких
применения. Многие дополнительные применения рассматриваются в главах 9 и 10 (в которых
идет речь об уравнениях в частных производных и задачи с граничными условиями).
3.8. Краевые задачи и собственные значения 337
Вращающаяся струна
Вас когда-нибудь интересовал вопрос, какую форму примет быстро вр>ащающаяся скакалка?
Рассмотрим форму натянутой упругой струны длиной L постоянной линейной плотностью р
(равной массе единицы длины струны), которая вращается (как скакалка) вокруг положения
равновесия с постоянной угловой скоростью ш (радианах в секунду). Выберем ось х так,
чтобы струна вращалась вокруг оси х. Будем считать, что в каждой точке сила натяжения
струны в одну сторону равна силе натяжения в другую сторону и равна постоянной силе
Г, которая направлена по касательной к струне в этой точке. Кроме этого будем считать,
что при вращении струны вокруг оси х каждая точка струны описывает окружность, центр
которой находится на оси х в положении равновесия этой точки. Так как струна эластичная,
при вращении она растягивается и принимает изогнутую форму. Обозначим через у(х)
смещение струны от точки х на оси вращения. Наконец, будем считать отклонение струны
настолько малым, что sin 0 «tg 0 = у'(х) (рис. 3.8.2(c)).
Попробуем получить дифференциальное уравнение для у(х), применяя второй закон
Ньютона F = та к участку струны массы р Ах, соответствующему интервалу [х, х + Ах].
На этот участок действуют только силы натяжения, приложенные к его концам. Из рис. 3.8.3
мы видим, что вертикальная составляющая силы в направлении у равна
F = Tsin@ + Ав) - Tsin0 « Ttg@ + Ав) - Ttg0,
ШУ
I т т
1 ' ■* »
1jc = 0 x = L
Положение равновесия
(а)
Вращающаяся струна
<Ъ)
/ \ j^q ! Вертикальная
(*. У)уГ V?
^ - -' J составляющая:
/ rsinfl
/
Струна
(с)
Рис. 3.8.2. Вращающаяся струна
х х + Ах
Рис. 3.8.3. Силы, приложенные
к маленькому сегменту
вращающейся струны
338 Глава 3. Линейные уравнения высших порядков
поэтому
F да Ту'(х + Ах) - Ту'(х). A5)
Из начального курса анализа (или элементарного курса физики) известно, что
центростремительное ускорение тела при равномерном круговое движении равно а = по2 (где г —
радиус круга, а ш — угловая скорость тела). Здесь г = у, поэтому вертикальное ускорение
участка струны равно а = — и2у (знак "минус" поставлен потому, что направление внутрь
противоположно направлению оси г/). Учитывая, что га = р Ах9 подставим это выражение
и формулу A5) в F = та. Получим
Ту'(х + Ах) - Ту'{х) да -рш2уАх,
отк^ца
ГУ(* + А*)-?/(*) 2
Ах
Перейдем к пределу при Ах —► 0. Получим дифференциальное уравнение движения струны:
Ту" + ри>2у = 0. A6)
Обозначим
А-^. A7)
Использовав условие, что концы струны закреплены, получим задачу на собственные
значения
1/" + А|/ = 0; 2/@) = 0, y(L) = 0. G)
Мы уже рассматривали эту задачу в примере 3. Там мы нашли, что собственными значениями
задачи G) являются числа
П27Г2 .. л л
^ = -£2"' п = 1,2,3,..., (8)
и что числу Ап соответствует собственная функция уп{х) — sin(n7r±/L).
Но что это значит в задаче о вращающейся струне? Это значит, что если значение А в A7)
не равно одному из собственных значений (8), то единственным решением задачи является
тривиальное решение у(х) = 0. В этом случае струна остается в положении равновесия,
а отклонение, естественно, равно нулю. Но если мы приравняем A7) и (8) и из полученного
уравнения найдем значение ип, соответствующее Ап
то для п — 1, 2, 3, ... мы получим последовательность критических скоростей, т. е.
критических частот вращения. Только при этих критических значениях угловой скорости
струна моэзкет вращаться вне своего положения равновесия» При угловой скорости шп она
3.8. Краевые задачи и собственные значения
339
принимает форму уп = сп sin(n7rx/L). Однако в нашей математической модели не хватает
данных для определения коэффициента сп.
Предположим, что мы начинаем вращать струну со скоростью
U) < UJ\
и постепенно увеличиваем скорость ее вращения. Пбюа о> < и)\9 струна остается в
несмещенном положении и у = 0. Но при и> = u>i струна перескакивает (вращаясь) в положение
у = с\ sm(nx/L). А когда uj снова возрастает, струна быстро возвращается в несмещенное
положение на оси вращения!
Провисание (прогиб) однородной балки
Рассмотрим пример применения достаточно простой краевой задачи для объяснения
довольно сложного физического явления — формы, которую принимает горизонтальная балка
под действием вертикальной силы.
Рассмотрим горизонтальную балку из однородного материала с постоянным сечением,
изображенную нарис. 3.8.4. Если она опираетсятолько на концах, то под действием
собственного веса ее продольная ось симметрии изгибается (на рисунках 3.8.4 и 3.8.5 она отмечена
пунктиром). Наша цель — исследовать форму кривой у = у(х)9 т. е. кривой прогиба балки.
Для этого введем систему координат так, как показано на рис. 3.8.5. Ось у направлена вниз.
Рис. 3.8.4. Искривление
(деформация) горизонтальной балки
Положительное направление
оси у
Рис. 3.8.5. Кривая прогиба
Из теории упругости следует, что при достаточно малых отклонениях балки (настолько
малых, что величиной [у'(х)]2 можно пренебречь по сравнению с единицей), кривая
прогиба описывается математической моделью, в основу которой положено дифференциальное
уравнение четвертого порядка
Ely^ = F(x),
A9)
где
• Е обозначает модуль Юнга материала балки;
• / обозначает момент инерции поперечного сечения балки относительно горизонтальной
линии проходящей через центр тяжести поперечного сечения;
• F(x) обозначает плотность силы, действующей вертикально вниз на балку в точке х.
Что такое плотность силы? В данной задаче это сила, действующая на единицу длины.
Таким образом, сила, действующая на очень короткий отрезок балки [ж, ж + Д#],
приблизительно равна F(x) Ах. Размерностью -Р(ж) является единица силы йа единицу длины. Мы
340 Глава 3. Линейные уравнения высших порядков
рассмотрим случай, когда единственной силой, распределенной по балке, будет ее
собственный вес, w фунтов на фут, так что F(x) = w. Тогда уравнение A9) примет вид
ElyW = щ B0)
где E9Inw — константы.
Замечание. Мы не предполагаем наличие каких-либо предварительных знаний по
теории упругости или уравнений A9) и B0). Однако важно уметь анализировать
дифференциальные уравнения, получаемые в других прикладных областях. Ведь изучая решения
уравнения, мы учимся понимать его смысл. Заметим, что из уравнения B0) следует, что
четвертая производная пропорциональна плотности веса, т. е. удельной плотности.
Коэффициент пропорциональности содержит две постоянные—модуль Юнга Е9 который зависит
только от материала балки, и момент инерции I, который зависит только от формы
поперечного сечения балки. Значение модуля Юнга для разных материалов можно найти в
справочниках физических величин; I = \тга4 для круглого поперечного сечения радиусом а.
Несмотря на то, что уравнение B0) является дифференциальным уравнением четвертого
порядка, решение его сводится к решению уравнений первого порядка, которые решаются
интегрированием. Проинтегрировав уравнение B0) первый раз, получим, что
EIyi3) =wx + d;
после второго интегрирования получим
Ely" = \wx2 + dx + С2;
еще одно интегрирование даст
Ely' = \wx* + \dx2 + С2х + С3;
и након<ец, последнее интегрирование дает
Ely = ±wx4 + |Cix3 + \С2х2 + С3х + С4,
где С\, С2, Сз и С а—некоторые произвольные постоянные. Таким образом получим решение
уравнения B0) в виде
у(х) = 2^Их4 + Ах* + Вх2 + Сх + D' B1)
где A9B9CnD — константы, полученные после четырех интегрирований.
Эти четыре постоянные можно определяются способом крепления балки на концах, т. е.
при х = 0 и х = L. На рис. 3.8.6изображены два способа крепления, причем каждый конец
можно закрепить своим способом. Например, на рис. 3.8.7 изображена консоль — балка
прочно закреплена в точке х = 0, но не закреплена (вообще н$т никакой опоры) на конце
х — L. В следующей таблице показаны граничные, или краевые, условия для трех самых
распространенных случаев. Именно эти краевые условия часто используются при решении
задач, связанных с креплением балок, но подробное их обсуждение выходит за пределы
данной книги.
3.8. Краевые задачи и собственные значения
341
*=о
x-L
*ЧгЧ&&аыгЧ&в."&
Концы подвешены или просто
опираются на опоры
х = 0
x-L
Концы жестко закреплены
(заделаны)
Рис. 3.8.6. Два способа
крепления балки
\
Консоль \
Рис. 3.8.7. Консоль — балка, один
конец которой заделан, а второй не
закреплен вообще
Опора
*Лшшшшш*и\ iiiifmi
*$шЛ*^кк**т*ШИШт*
Крае в ые уттт
Простая опора
Заделанный (защемленный) конец
Свободный конец
У = у" = О
у = у' = о
у" = уC) = о
Например, кривая прогиба консоли на рис. 3.8.7 задается уравнением B1), где
коэффициенты A,B9ChD определяются из условий
1/@) = 1/'@) = 0 и y"(L) = yW(L) = 0,
B2)
т. е. конец в точке х = 0 закреплен, а конец в точке х = L — свободен (не закреплен).
Условия B2) и дифференциальное уравнение B1) составляют краевую задачу.
Пример 5
Найдем кривую прогиба однородной горизонтальной балки длиной L
и весом w на единицу длины, оба конца которой лежат на простых опорах.
Решение Запишем краевые условия в нашей задаче:
у@) = у"@) = 0 = y(L) = y"(L).
Вместо того чтобы подставлять их прямо в уравнение B1), мы начнем
с дифференциального уравнения Ely^ = w и найдем постоянные,
которые будут возникать при (четырехкратном) интегрировании. В результате
первых двух интегрирований получим
Ely^ = wx 4- А-, Ely" = \wx2 + Ax + В.
Поскольку у"@) = 0, то В = 0, и тогда из y"(L) = 0 следует, что
0 = \wL2 + AL.
342 Глава 3. Линейные уравнения высших порядков
Поэтому А — —wL/2 и тогда
Ely" = \х2 - \wLx.
Теперь нужно проинтегрировать еще два раза. Сначала будем иметь
Ely' = \wx* - \wLx2 + С,
а после последнего интегрирования получим
EIy(x) = ^-ivx* - ±wLx3 + Cx + D. B3)
Теперь из у@) = 0 следует, что D = 0; затем, так как y(L) = 0,
0 = ±wL4 - ±wL* + CL.
Отсюда находим С = wL3/24. Из уравнения B3) мы получим уравнение
У(х) = 2i|j(z4 " 2Ьх3 + L*x), B4)
которое определяет форму балки, свободно лежащей на простых опорах.
Из соображений симметрии (см. также задачу 17) понятно, что
наибольшее отклонение ут^ балки достигается посередине, т. е. при х = L/2,
и оно равно
(L\ w /1 4 2 4 1 4
У- = У{2Г2ШЫЬ ~8L +2L
иными словами,
- 5wL4 пъ
Утах~384ЕГ ( }
Пример б
Пусть, например, необходимо вычислить наибольшее отклонение
стального стержня, концы которого лежат на простых опорах, если известно,
что длина стержня равна 20 футам, а его сечение представляет собой круг
диаметра 1 фут. В справочнике мы находим, что плотность стали равна
S = 7,75 г/см3, а ее модуль Юнга равен Е = 2 х 1012г/см-с2,такчтонам
удобнее работать в системе СГС (в системе сантиметр-грамм-секунда).
Сначала переведем в эту систему размеры нашего стержня:
длина L = B0 футов) ( 30,48 ^- ] = 609,60 см
и радиус а = ( - дюйма 1 ( 2,54 —— 1 = 1,27 см.
\2 ) \ дюйм/
3.8. Краевые задачи и собственные значения 343
Линейная плотность (масса на единицу длины) стержня равна
р = na2S = тгA,27JG,75) « 39,27 —,
см
поэтому
w = рд = C9.27Л) (980 2f) « 38484,6 £.
Момент инерции (момент второго порядка) диска радиусом а вокруг диа-
4
1
метра равен / = Wfl4>так что
/=-^тгA,27L« 2,04 см4.
Из равенства B5) следует, что
E) C8484,6) F09,60L лгы
^"C84)Bх1012)B,04)6'96СМ'
т. е. 6,68 дюйма; это и есть максимальное отклонение стержня, причем
оно достигается, как мы уже знаем, посредине. Интересно, что г/тах
пропорционально L4, поэтому, если бы длина стержня была только 10 футов,
то его максимальное отклонение было бы в 16 раз меньше — всего
около 0,42 дюйма. Так как / = ^7га4, из равенства B5) следует, что такого
же уменьшения отклонения можно достичь, увеличив радиус стержня а
вдвое. ■
Стержень на стяжке
Нарис. 3.8.8 изображен однородный стержень длинойЬ. Его концы закреплены нашарнирах.
Он выгибается под действием продольной сжимающей силы Р, приложенной к одному из
концов. Мы считаем сжатие стержня настолько малым, что областью определения кривой
у = у(х) можно считать отрезок 0 й х ^ L. В теории упругости линейная краевая задача
Е1у" + Ру = Ъ, y@) = y(L)=0 B6)
описывает действительное (нелинейное) поведение стержня. Как и в задаче о прогибе балщ*
Е обозначает модуль Юнга материала, а /—момент инерции поперечного сечения балки
относительно горизонтальной линии, проходящей Через центр тяжести поперечного сечения.
Если мы напишем
А=Ж' B7)
у=у{х)
Рис. 3.8,8. Стержень на стяжке
344 Глава 3. Линейные уравнения высших порядков
то задача B6) примет вид задачи на собственные значения
у" + Ху = 0; 1/@) = y(L) = 0, G)
которую мы рассмотрели в примере 3. Напомним, что ее собственные числа {Ап} равны
ТЬ 7Г
Ап =-72~, п= 1,2,3,... (8)
Каждому значению Ап соответствует собственная функция уп = sm(n7rx/L). (В задачах
о вращающейся струне и прогибе стержня собственные числа и собственные значения одни
и те же.)
Чтобы интерпретировать этот результат для выгибающегося стержня, напомним, что
в соответствии с равенством B7) Р = XEI. Силы
Рп = XnEI = L2 , n = 1,2,3,... B8)
являются критическими силами сэ/сатия стержня. Только когда сжимающая сила Р равна
одному из критических значений силы сжатия, стержень будет "выгибаться", и его форма
будет отлична от его прямого (неизогнутого) положения. Наименьшее сжимающее усилие,
при котором это происходит, равно
п2Е1
Эта наименьшая критическая сила называется эйлеровым критическим усилием при
продольном изгибе13 стержня. Это верхняя граница тех сжимающих усилий, которые можно
приложить к стержню, не опасаясь изогнуть его. (Однако на практике стержень может
согнуться при значительно меньшей нагрузке под влиянием факторов, которые не учтены
в этой математической модели.)
*»#>^>№*«rft*>iftWW'»<Wa*№»flW»^^
Пример 7
Предположим, нужно вычислить эйлерово критическое усилие при
продольном изгибе стального стержня длиной 10 футов, если известно, что
поперечное сечение стержня представляет собой круг диаметром 1 дюйм.
В системе СГС (сантиметр-грамм-секунда) мы имеем
Е = 2х 1012т/сы-с,
L = A0 футов) ( 30,48 -jj^L J = 304,8 см и
'-\
@,5 дюйма) ( 2,54
\14
«2,04 см .
дюйм
им/
Подставляя эти значения в равенство B9), находим, что эйлерово
критическое усилие при продольном изгибе этого стального стержня равно
Pi « 4,34 х 108 дин « 976 фунтов,
если использовать переводной коэффициент 4,448 х 105 дин/фунт. I
13
А также иногда эйлеровой критической силой, или просто критической силой. — Примеч. ред.
3.8. Краевые задачи и собственные значения
345
3.8. Задачи
Собственные числа в задачах 1-5 неотрицательны. Сначала определите, является ли Л = 0
собственным числом; затем найдите положительные собственные значения и соответствующие им
собственные функции.
2. у" + Ху = 0; у'@) = 0, у'{-к) = О
4. у" + Ху = 0; у'(-тг) = 0, у'(тг) = О
1. у" + Ау = 0;у'@) = 0,уA) = 0
3. у" + Ау = 0; у(-тг) = 0,у(тг) = О
5. у" + Ху = 0; у(-2) = 0, у'B) = О
6. Рассмотрим задачу на собственные значения
у" + Ау = 0; 2/'@) = 0, уA)+ у'A) =0.
Все ее собственные числа неотрицательны, поэтому запишем Л = а2, где а ^ 0. (а) Покажите,
что Л — 0 не является собственным числом. (Ь) Покажите, что у — A cos ах + В sin схж
удовлетворяет краевым условиям тогда и только тогда, когда В = 0 и а является положительным
решением уравнения tgz = 1/г. Эти корни {an}i° — абсциссы точек пересечения кривых
у = tg z и у = 1/г (как показано на рис. 3.8.9). Поэтому собственными значениями и
собственными функциями этой задачи будут числа {a2}i° и функции {cos апх}^° соответственно.
Рис. 3.8.9. Собственные числа—точки
пересечения графиков у = tg z и у = \/z
7. Рассмотрим задачу на собственные значения
у" + Ху = 0; у@) = 0, уA) + у'A) = 0.
Все ее собственные числа неотрицательны, (а) Покажите, что А = 0 не является собственным
числом. (Ь) Покажите, что собственные функции равны {sin an#}i°, где ап — n-й
положительный корень уравнения tg z = — z. (с) Постройте график, изобразив корни {ап}1°, как абсциссы
точек пересечения кривых у = tg z и у = — z. Покажите на графике, что ап «Bп — 1Oг/2 при
большом п.
8. Рассмотрим задачу на собственные значения
у" + \у = 0; у@) = 0, г/A) = J/'(l)-
Все ее собственные числа неотрицательны, (а) Покажите, что А = 0 — собственное число,
причем ему соответствует собственная функция уо{х) = х. (Ь) Покажите, что остальные
собственные функции равны уп(х) — sinj3nx, где /Зп — n-vi положительный корень уравнения
tgz = z. Постройте график, отметив на нем эти корни. Покажите на графике, что /Зп « Bп +
+ 1Oг/2 при большом п.
346 Глава 3. Линейные уравнения высших порядков
9. Докажите, что у краевой задачи из примера 4 нет отрицательных собственных чисел.
10. Докажите, что у краевой задачи
; у":тЬАу = 0; 2/@) = 0, y(l) + 2/(l) = 0
i
нет отрицательных собственных чисел. (Указание. Покажите графически, что уравнение th z =
= — z имеет единственное решение z = 0.)
11. Используя метод решения задачи 10, покажите, что в задаче 6 на собственные значения нет
отрицательных собственных значений.
12. Рассмотрим задачу на собственные значения
у" + Ху = 0; 2/(-7г) = 2/Gг), у'(-п) = уг(п).
Эта задача не похожа на задачу A0), так как краевые условия "не разделены" между двумя
концами, (а) Покажите, что Ао = 0 — собственное число, причем ему соответствует собственная
функция уо(х) = 1. (Ь) Покажите, что отрицательных собственных значений нет. (с) Покажите,
что n-е положительное собственное число равно п2 и что ему соответствуют две линейно
независимые собственные функции cos nx и sin nx.
13. Рассмотрим задачу на собственные значения
у" + V + Ху = 0; 2/@) = 2/A) = 0.
(a) Покажите, что А = 1 не является собственным числом. (Ь) Покажите, что не существует
собственных значений А таких, что А < 1. (с) Покажите, что n-е положительное собственное число
равно Ап = п27г2 + 1, причем ему соответствует собственная функция уп(х) = е~х smnnx.
14. Рассмотрим задачу на собственные значения
у" + 2у' + Ху = 0; 2/@) = 0, у'A) = 0.
Покажите, что все собственные числа положительны и что n-е положительное собственное
число равно Ап = о?п +1, причем ему соответствует собственная функция уп(х) = е~х sin anx,
где ап — п-й положительный корень уравнения tg z = z.
15. (а) Однородная консольная балка жестко закреплена в точке х = 0и свободна в точке х — L
(другой ее конец). Покажите, что она примет форму кривой
y(x) = ^I(x4-4Lx3+6L2x2).
(b) Покажите, что у'(х) = 0 только при ж = 0и что из этого следует (почему?), что
максимальное провисание равно 2/max = y(L) = wL4/(8EI).
16. (а) Предположим, что концы балки (х = 0 и х = L) жестко закреплены (заделаны). Покажите,
что форма балки задается уравнением
y(x)=2lfe(a:4~2La;3 + LV)-
(b) Покажите, что корнями уравнения у'(х) = 0 являются числа ж = 0, х — L и х = L/2,
откуда следует (почему?), что максимальное значение провисания балки равно
(L\ wL4
У™*-У{2) ~~ШЕ1'
т. е. одной пятой максимального провисания балки, концы которой лежат на простых опорах.
3.8. Краевые задачи и собственные значения 347
17. Пусть концы балки лежат на простых опорах, а кривая прогиба задается формулой B4).
Покажите, что уравнение у' (х) = 0 на [О, L] имеет единственный корень х — L/2, откуда следует
(почему?), что максимальное значение провисания балки действительно задается формулой B5).
18. (а) Левый конец балки (х = 0) закреплен, а правый (х = L) лежит на простой опоре. Покажите,
что кривая провисания задается формулой
У{х) = 4^7Bа:4 - ЬЬх3 + 3LV).
(b) Покажите, что максимум провисания балки достигается при х = A5 — л/33I//16 и равен
приблизительно 41,6% максимального провисания балки в том случае, если бы оба ее конца
лежали на простых опорах.
TV
4/4 n,
^7 .
'4 4/4 4/
4 4 4 d 4/4
4/4 4/4 I 4>
-J 4/1 4/4 4
V4 4'Ы £ 4/J
^ '' ' /±±
£U ti i ifjt\
ГЛАВА
Введение
в системы
дифференциальных
уравнений
4.1. Системы первого порядка и их приложения
В предыдущих главах мы рассматривали методы решения обыкновенных
дифференциальных уравнений с одной неизвестной функцией. Однако во многих приложениях
встречаются обыкновенные дифференциальные уравнения, содержащие две или больше
неизвестных функций, зависящих от одной переменной (обычно от времени). Такие задачи
естественно приводят к системе обыкновенных дифференциальных уравнений. Обычно
мы будем обозначать неизвестные функции, зависящие от переменной t, через х±9Х29хз,
..., или через х, у, z,... . Штрихами мы будем обозначать производные по t.
Сосредоточим наше внимание на системах, в которых количество уравнений равно
количеству неизвестных функций. Например, систему двух уравнений первого порядка
относительно неизвестных функций х и у в общем виде можно записать следующим образом:
f(t1x,y,x\y') = 0,
g(t,x,y,x',y') = 0,
A)
где функции / и д заданы. Решением этой системы на некотором интервале значений t
называется пара функций x(t)9 y(t) от t, в результате подстановки которой в оба уравнения
эти уравнения превращаются в тождества на этом интервале.
Приведем пример системы уравнений второго порядка. Для этого рассмотрим частицу
массой т, которая движется в пространстве под действием силового поля F, зависящего от
времени t, координат (x(t), y(t), z(t)) частицы и ее скорости (x'(t), y'(t), z'(t)). Записывая
второй закон Ньютона ma = F в координатной форме, получим систему
тх" = Fi (t, ж, г/, г, х\ у', Z1),
ту" = F2(t, х, г/, г, х', у', z'),
mz" = F3(t, ху г/, г, х\ у', z')
B)
350 Глава 4. Введение в системы дифференциальных уравнений
трех дифференциальных уравнений второго порядка относительно неизвестных функций
х, у, z, зависящих от независимой переменной t. Три стоящих с правой стороны функции
Fi, F2, F3 — компоненты векторнозначной функции F.
Простейшие применения
Примеры 1-3 иллюстрируют, каким образом системы дифференциальных уравнений
возникают в научных задачах.
Пример 1
Рассмотрим систему, состоящую из двух тел и двух пружин,
изображенную на рис. 4. L1, причем заданная внешняя сила f(t) действует на тело
массой т2, находящееся справа. Обозначим через х (t) смещение (вправо)
тела массы т\ от его статического положения равновесия (когда система
не движется и находится в положении равновесия и, кроме того, / (t) = 0),
а через y(t) — смещение тела массой т2 от его положения равновесия.
Таким образом, если х и у равны нулю, пружины не являются ни сжатыми,
ни растянутыми.
На рис. 4.1.1 первая пружина растянута на х единиц, а вторая на у — х
единиц. Применив второй закон Ньютона к двум "диаграммам свободных
тел", изображенных на рис. 4.1.2, мы получим систему
дифференциальных уравнений
mix" = -кхх + к2(у - х),
m2y" = -k2(y-x) + f(t) ()
с двумя неизвестными функциями x(t) и y(t) — смещениями тел;
фактические смещения тел должны удовлетворять этой системе уравнений.
Например, если mi = 2,Ш2 = 1, fci = 4,к2 = 2,а/(£) = 40 sin St в
соответствующих физических единицах измерения, то система C) сводится к
2х" = -6х + 2г/,
у" = 2x-2y + 40sin3£.
D)
1 *1 г—1 *2
1 *^^^^^ ^ ^^щщ.
Положения равновесия
кхх р~ £20>-*)
/^(у-л)
Рис. 4.1.1. Системателипружин Рис. 4.1.2. "Диаграммы свобод-
из примера 1 ных тел" для системы из примера 1
Пример 2
Два резервуара с раствором соли соединены так, как показано на рис. 4.1.3.
Резервуар 1 содержит x(t) фунтов соли на 100 галлонов воды, а резервуар
2 — y(t) фунтов соли на 200 галлонов воды. Соляной раствор в каждом
4.1. Системы первого порядка и их приложения 351
.20г$лл/мин
I Пресная вода
Бак1 ЗОгалл/мин Бак2
20 галл/мин
Рис. 4.1.3. Два резервуара
с раствором соли из примера 2
из резервуаров тщательно перемешивается, и потому раствор можно
считать абсолютно однородным. Раствор соли церекачивается из резервуара
в резервуар, скорости указаны на рис. 4.1.3. Кроме того, в резервуар 1 со
скоростью 20 галлонов/мин вливается пресная вода, а соляной раствор
вытекает из резервуара 2 со скоростью 20 галлонов/мин (таким
образом, объем раствора в резервуарах остается постоянным). Концентрации
соли в резервуарах равны х/100 фунтов на галлон и у/200 фунтов на
галлон соответственно. Вычислив скорости изменения количества соли
в резервуарах, мы получим систему дифференциальных уравнений
относительно неизвестных функций x(t) и y(t):
/ х 'л у 3 1
х = -30 Ь 10 • -£- = х Н г/,
100 200 10 20У'
, х v v 3
у' = 30 10 • — - 20 • — = —х -
, 100 2Q0 200 10
иными словами,
20а/ = -6х + у,
20у' = 6х - Зг/.
3
" 20^'
E)
■
Рассмотрим электрическую цепь, изображенную на рис, 4.1.4, Обозначим
через I\ (t) ток, проходящий в указанном направлении через дроссель
(катушку индуктивности) L, а через h (t)—ток, проходящий через резистор
J?2. Ток, проходящий через резистор Ri в указанном направлении, равен
I = Ji — J2. Согласно закону Кирхгофа для напряжения (алгебраическая)
сумма падений напряжений в любом замкнутом контуре этой цепи равна
нулю. Как и в разделе 3.7, напряжения на элементах (всех трех типов) цепи
приведены на рис. 4.1.5. Применив закон Кирхгофа к левому замкнутому
контуру цепи, получим уравнение
2§+50(Ji-I2)-100 = 0,
at
F)
352 Глава 4. Введение в системы дифференциальных уравнений
L: 2 генри С: 0,008
JTYY\ т I L
100 вольт — \ 50 ом
Рис. 4.1.4. Электрическая цепь из примера 3
Падение
Элемент напряжения
цепи на элементе
Дроссель
Резистор
Конденсатор
Ld-l
dt
RI
Рис. 4.1.5. Падения напряжения
на элементах электрической цепи
так как падение напряжения между отрицательным и положительным
полюсами батареи равно —100. Для правого замкнутого контура цепи
получим уравнение
125Q2 + 25/2 + 50(/2 - h) = 0, G)
где Q2(t) — заряд конденсатора. Так как dQ2/dt = I2, дифференцируя
обе части уравнения G), получим уравнение
125/2 + 75^ - 50^± = 0. (8)
at at
Разделив обе части уравнений F) и (8) на 2 и — 25 соответственно, получим
систему
§■ + 25/i - 25/2
at
' dt
db
50,
0
(9)
дифференциальных уравнений, которой должны удовлетворять токи I\ (t)
Kl2(t). Ш
Системы первого порядка
Предположим, что каждое дифференциальное уравнение системы можно разрешить
относительно старшей производной (производной наивысшего порядка) зависимой переменной,
входящей в данное уравнение. Иными словами, предположим, что в каждом уравнении
старшая производная (т. е. производная наивысшего порядка) зависимых переменных, входящих
в уравнение, может быть представлена в виде явной функции от t и производных
зависимых переменных более низких порядков1. Например, в случае системы уравнений второго
порядка наше предположение эквивалентно тому, что систему можно представить в виде
xi = fi(t,xi,X2,x'1,x'2),
A0)
х2 = f2(t,Xl,X2,x'1,x'2).
1 Системы такого вида называются нормальными системами дифференциальных уравнений, или просто
нормальными системами. — Примеч. ред.
4.1. Системы первого порядка и их приложения 353
Как с практической, так и с теоретической точек зрения очень важно, что любая такая система
таганего порядка шлкет быть преобразована в эквивалентную систему уравнений первого
порядка.
Чтобы описать выполнение такого преобразования, сначала рассмотрим "систему",
состоящую из одного уравнения n-го порядка
х
(п)
/(M,z,,...,*^-1>). (П)
Введем новые зависимые переменные х\9 Х2,..., хп следующим образом:
Х\ = X, Х2=х\ Хз = х", . .., Хп=Х<<П~1\ A2)
Заметим, что х[ = х' = Х2, х'2 = х" = хз и т.д. Поэтому, подставив равенства A2)
в уравнение A1), получим систему
х[ = х2,
х'2 = х3,
хп—1 — хп)
A3)
Хп = f(t,Xi,X2,..4Xn)
п уравнений первого порядка. Очевидно, что эта система эквивалентна исходному
уравнению n-го порядка A1) в том смысле, что функция x(t) будет решением уравнения A1)
тогда и только тогда, когда функции х\ (t), х2 (t),..., хп (t), определенные равенствами A2),
удовлетворяют системе уравнений A3).
Пример 4
Уравнение третьего порядка
хC) + Зх" + 2х' - 5х = sin 2t
можно представить в виде A1), если ввести функцию
f(t, х, х', х") = Ъх- 2х' - Зх" + sin 2b.
Тогда, подставив
Х\ = X, Х2 = X = Х1, Хз = X = Х2,
получим систему
х[ = Х2,
х'2 — х3,
х'3 = 5xi — 2^2 — Зхз + sin 2t
трех уравнений первого порядка. ■
Может показаться, что система уравнений первого порядка, полученная в примере 4, не
дает практически никаких преимуществ, так как можно использовать методы главы 3 для
354 Глава 4. Введение в системы дифференциальных уравнений
решения исходного (линейного) уравнения третьего порядка. Но предположим, что нужно
найти решение нелинейного уравнения
х" = х3 + (x'f.
Для того чтобы найти решения такого уравнения ни один из известных нам (пока) методов
не подходит. Но соответствующая система уравнений первого порядка имеет вид
х[ =х2,
4 = (я1K + Ы3.
В разделе 4.3 мы увидим, что существуют достаточно эффективные численные методы
для приближения решений по существу всех систем уравнений первого порядка. Поэтому
в Данном случае переход к системе уравнений первого порядка будет полезным. На
практике большие системы дифференциальных уравнений высших порядков обычно решаются
численными методами с помощью компьютеров. Поэтому первым шагом в поиске
решения таких систем является преобразование такой системы в систему первого порядка, для
решения которой можно применить существующие компьютерные программы.
Пример 5
Рассмотрим систему
2х" = -6х + 2г/,
D)
у" = 2х- 2z/ + 40sin3£
уравнений второго порядка, полученную в примере 1. Преобразуем эту
систему в эквивалентную систему уравнений первого порядка.
Решение Используя в качестве образца равенства A2), положим
xi =х, х2 = х' = х'1, У\=у, У2 = у' = у[-
Тогда из системы D) получим систему
х[ = х2,
2х'2 = -6xi +2г/ь
У[ = 2/2,
A5)
Уз = 2xi -2yi+40sin3£
четырех дифференциальных уравнений первого порядка с зависимыми
переменными (неизвестными функциями) х±9 х2, ух и у2. Ш
Простые двумерные системы
Линейное уравнение второго порядка
х" +рх' + qx = 0 A6)
4.1. Системы первого порядка и их приложения 355
с постоянными коэффициентами и независимой переменной t с помощью подстановок х' =
= у, х" = у' преобразуется в двумерную систему линейных дифференциальных уравнений
xf = у,
(П)
у = -qx-py.
И наоборот, чтобы решить систему A7), достаточно решить уже хорошо знакомое нам
уравнение A6).
Пример 6
Чтобы найти решение двумерной системы
х' = -2у,
, г A8)
У =ъх>
сначала заметим, что
х" = -2у' = -2 (\х) = -х.
Отсюда получим одно уравнение второго порядка х" -\- х — О, общим
решением которого является функция
x(t) = A cos £ + В sin £ = С cos(t — a),
где Л = С cos а и В = С sin а. Тогда
y(t) = -^x'(t) = -i(-j4sint +Bcos*) =
= ^Csin(t — a).
Из тождества cos2 0 + sin2 в = 1 следует, что для любого значения t точка
{x{t),y(t)) лежит на эллипсе
х2 у2
с2 + ТсЩ2 =1'
полуоси которого равны С и С/2. На рис. 4.1.6 изображено несколько
таких эллипсов на плоскости ху.
■
Решение (x(t), y(t)) двумерной системы дифференциальных уравнений
х' = f(t,xyy),
y' = g(t,x,y)
можно рассматривать как параметризацию фазовой траектории (называемой часто
просто траекторией) системы на плоскости ху. Таким образом, траекториями системы A8)
будут эллипсы, изображенные на рис. 4.1.6. Выбор начальной точки (х@), 2/@)) однозначно
определяет, какую именно из траекторий параметризирует частное решение.
Рисунок, изображающий траектории системы на плоскости ху, называется фазовым
портретом. Фазовый портрет не дает информации о том, как именно точка (x(t), y(t)) дви-
356 Глава 4. Введение в системы дифференциальных уравнений
i i i i i I i i i i i
i i I i iii ii i i
-5-4-3-2-1 0 12 3 4 5
х
Рис. 4.1.6. Поле направлений
и фазовые траектории системы
х' = —2г/, у' = \х из примера 6
жется по своей траектории. Если функции / и д не зависят от независимой переменной
t, можно построить поле направлений. Поле направлений обычно изображается
стрелками, которые изображают векторы, компоненты которых пропорциональны производным
х' = /(х, у) и у' = д(х, у). Так как вектор скорости движущейся точки (x(t), y(t)) равен
(x'{t), y'(t)), поле направлений указывает направление, в котором движется точка по
своей траектории. Например, поле направлений, изображенное на рис. 4.1.6 показывает, что
каждая точка движется по своей эллиптической траектории против часовой стрелки.
Дополнительная информация может быть получена с помощью построения отдельных графиков2
x(t) и г/(£), как функций, зависящих от переменной t.
2 Используя механическое истолкование нормальной системы, говорят^ что решению системы соответствует
движение точки в пространстве, координатами которого служат независимое переменное (время) и искомые
функции. Таким образом, в соответствии с механическим истолкованием нормальной системы,
интегральная кривая называется движением. Само пространство, координатами которого служат искомые функции,
называется фазовым пространством. Если фазовое пространство двумерно, оно, естественно, называется
фазовой плоскостью. Кривая, описываемая в фазовом пространстве движущейся точкой, естественно, называется
траекторией. Взаимосвязь между траекторией и движением состоит в том, что траектория есть проекция
движения (оно расположено в пространстве, координатами которого служат независимое переменное и
зависимые переменные) в пространство, координатами которого служат зависимые переменные. Решение (в
механической интерпретации называемое движением) не только определяет траекторию как геометрическое место
точек, но, определяя положение точки на траектории в любой момент времени, показывает, как происходит
движение точки по траектории с течением времени. Это и неудивительно, поскольку движение (интегральная
кривая) расположено в пространстве, размерность которого на единицу больше размерности пространства,
в котором расположена траектория. Поскольку интегральная кривая (движение) и траектория расположены
в пространствах разных размерностей (и сами имеют разные размерности, отличающиеся на единицу!),
совершенно очевидно, что, строго говоря, траектория и интегральная кривая (движение) — совершенно разные
веши! Впрочем, строгостью этой некоторые англоязычные авторы иногда пренебрегают, поскольку траекторию
(trajectory) часто называют также solution curve (что иногда подразумевает интегральную кривую). Но в любом
конкретном случае из контекста понятно, что имеется в виду. Чтобы убедиться в этом, еще раз взгляните на
рис. 4.1.6 и, закрыв подрисуночную подпись, ответьте, что там изображено — интегральные кривые или
траектории. {Подсказка. Конечно, в переводе книги в подрисуночной подписи указано, что именно там изображено.
Но даже в математических (не говоря уже о других, например, исторических) книгах не следует слепо доверять
написанному. В данном случае такая проверка весьма полезна — она позволит лучше разобраться в понятиях
интегральной кривой и траектории. Посчитайте размерности пространств, в которых лежат траектории и
интегральные кривые. Размерность изображенных на рис. 4.1.6 объектов (плоских кривых — эллипсов) чуть-чуть
маловата для интегральных кривых указанной там нормальной системы, не правда ли? Значит, там изображены
... (ответьте самостоятельно). Теперь откройте подрисуночную подпись и сверьте свой ответ.) — Примеч. ред.
4.1. Системы первого порядка и их приложения 357
^^^^^Ц Подставив начальные значения х@) = 2, у@) = 0 в общее решение
Продолжение уравнения из примера 6, получим
^@) = Л = 2, у($) = -\В
0.
Значит, искомым частным решением является пара функций
x(t) = 2 cost, y(t) = sint.
Графики этих двух функций изображены на рис. 4.1.7. Мы видим, что
сначала x(t) убывает, a y(t) возрастает. Отсюда следует, что с ростом t
точка решения (x(t), y(t)) движется по траектории \х2 + у2 = 1 против
часовой стрелки, как и указывает поле направлений, изображенное на
рис. 4.1.6. ■
Рис. 4.1.7. Графики компонентов решения задачи Коши
(задачи с начальными условиями) х1 = —2у, yf — |х,
х@) = 2,2/@) = 0, т.е. графики функций х и у,
являющихся компонентами параметрического представления
фазовой траектории
Пример 7
A9)
Чтобы найти общее решение системы уравнений
х' = у,
у' = 2х + г/,
вначале заметим, что
х" - у* = 2х + у = х' + 2х.
Отсюда получим линейное дифференциальное уравнецие второго порядка
х" - х' - 2х = 0
с характеристическим уравнением
r2_r_2 = (r+l)(r-2)=0
358 Глава 4. Введение в системы дифференциальных уравнений
4
3
2
1
* О
-1
-2
-3
-4
-4-3-2-101234
Рис. 4.1.8. Поле направлений и фазовые траектории
системы х' = г/, г/ = 2х + у из примера 7
и общим решением
x(t) = Ае~г + Be2t. B0)
Тогда
y(t) = o?'(t) = -Ле~* + 2Ве2К B1)
Типичные траектории на фазовой плоскости системы уравнений A9),
параметрическое задание которых определено уравнениями B0) и B1),
изображены на рис. 4.1.8. Дальнейшее исследование этих траекторий
выполняется в задаче 23. ■
Чтобы решить задачу Коши (задачу с начальными условиями)
х' = -г/,
2/' = A,01)я-@,2)г/, B2)
х@) = 0, г/@) = -1,
вначале заметим, что
х" = -У = -[A,01)а: - @,%] = (-1,01H? - @,2)оЛ
Отсюда получим линейное дифференциальное уравнение второго порядка
х" + @,2)х' + A,01)х = 0
с характеристическим уравнением
г2 + @,2)г + 1,01 = (г + ОДJ + 1 = 0.
Корни характеристического уравнения равны — 0,1 ± г, а его общее
решение представляет собой функцию
x(t) =e-t/10(Acost + B$mt).
Пример 8
4.1. Системы первого порядка и их приложения 359
Тогда х@) = А = 0, откуда
x{t) = Be~t/10 sint,
y(t) = -x'{t) = ^Ве"*/108Ш« - Be^/^cost.
Наконец, у@) = —В = —1. Поэтому искомое решение системы B2)
можно записать в виде
x{t) = е-*'10 sin*,
y(t) = ^e-t/10(sint - lOcost).
B3)
Эти уравнения задают параметрическое представление траектории,
которая в данном примере представляет собой спираль, изображенную на
рис. 4.1.9. Траектория стремится к началу координат при t —> +оо. На
рис. 4.1.10 изображены графики компонентов решения задачи Коши
(задачи с начальными условиями), т. е. графики функций х и у, заданных
равенствами B3); эти-то функции и являются компонентами
параметрического представления фазовой траектории. ■
1,2
0,8
0,4
^ 0,0
н
-0,4
-0,8
-J'2c
1 1 1—
Г x = x(t)
11 / /\v/I\Kj
y=y(t)
1 1 1
) 5 10 15
t
—г-
i
20
—i—
i
25
—п
-
-
_^
-
-
i
30
Рис. 4.1.9. Поле направлений
и фазовая траектория системы
х' = -у, у' = A,01)* - @,2)у
из примера 8
Рис. 4.1.10. Графики компонент решения
задачи Коши (задачи с начальными условиями),
т. е. графики функций х и у9 являющихся
компонентами параметрического представления
фазовой траектории из примера 8
Почему у таких очень похожих систем дифференциальных уравнений в примерах 6-8
траектории, изображенные на рис. 4.1.6, 4.1.8 и 4.1.9, столь сильно отличаются? На этот
вопрос мы дадим ответ при более глубоком изучении линейных систем в главе 5. *
Линейные системы
На практике с помощью численных методов проще найти приближенное решение системы
дифференциальных уравнений первого порядка, чем системы высшего порядка. Но не
только этим практическим соображением определяются преимущества систем первого порядка.
Общей теории систем дифференциальных уравнений, да и систематическим методам их
решения, можно придать более простой и более краткий вид, если ограничиться системами
360 Глава 4. Введение в системы дифференциальных уравнений
первого порядка. (Все необходимые результаты для систем высшего порядка легче
получить, рассматривая их как сводящиеся к системам первого порядка.) Рассмотрим, например,
линейную систему уравнений первого порядка
#i = Pll(t)xi + Pl2(t)x2 + • • • + PlnXn + /lW,
Xf2 = P2l{t)xi + P22(t)x2 + -•- + P2nXn + /2№>
. B4)
X'n = Pnl(t)xi + Pn2{t)X2 Л + PnnXn + /n(*)-
Эта система называется однородной, если все функции Д, /г,..., /п тождественно равны
нулю; в противном случае эта система называется неоднородной. Согласно этому
определению, система E) является однородной, а линейная система A5) — неоднородная.
Система A4) не относится к линейным, так как правая часть второго уравнения не является
линейной функцией относительно неизвестных функций xi и #2-
Решением системы уравнений B4) назовем кортеж из п функций xi(t), X2(t), ...,
хп (£), которые (на некотором интервале) тождественно удовлетворяют каждому из
уравнений B4K. Мы увидим, что общая теория систем п линейных дифференциальных уравнений
первого порядка во многом схожа с общей теорией одного линейного
дифференциального уравнения n-го порядка. Теорема 1, доказанная в приложении, похожа на теорему 2 из
раздела 3.2. В ней идет речь о том, что если коэффициенты системы B4) -— функции рц
и /j, непрерывны, то система имеет единственное решение, удовлетворяющее начальным
данным.
Существование решения линейной системы него
единственность
Предположим, что функциирц,pi2,... ,Рпп и функции /ь /г,... ,/п непрерывны на
открытом интервале /, содержащем точку а. Тогда для заданных п чисел Ь\, 62, • • •, Ьп система B4)
имеет единственное на интервале J решение, которое удовлетворяет п начальным условиям
хг(а) = 6Ь х2(а) = 62, • • •, хп(а) = Ьп. B5)
А
Следовательно, для определения какого-нибудь конкретного решения системы п
линейных дифференциальных уравнений первого порядка необходимы п начальных условий.
Поэтому стоит ожидать, что общее решение такой системы будет включать п произвольных
постоянных. Например, в примере 5 мы видели, что система линейных дифференциальных
уравнений второго порядка
2х" = - 6х + 2у,
у" = 2х - 2y + 40sin3£,
которая описывает зависимость координат x(t) и у (t) из примера 1 от времени, эквивалентна
системе четырех линейных уравнений первого порядка A5). Следовательно, для
определения движения системы из двух тел в примере 1 необходимо иметь четыре начальных условия.
3 Кортеж из п объектов математики часто называют энкой. Поэтому можно сказать, что решением системы
дифференциальных уравнений уравнений с п неизвестными функциями называется энка функций, которые (на
некотором интервале) тождественно удовлетворяют каждому из уравнений данной системы. —Примеч. ред.
Теорема 1
4.1. Системы первого порядка и их приложения 361
Стандартные начальные условия: начальные положения тел х@) и у@) и начальные их
скорости х'@) и у'@). Еще один пример: количество соли x(t) иу(Ь)в резервуарах в примере 2
описывается системой
20х' = -6#+ у,
20у' = 6х - Зу
двух линейных уравнений первого порядка. Поэтому для определения решения достаточно
двух начальных значений х@) и у@). Чтобы определить необходимое (для единственности
решения) количество начальных условий заданной системы высшего порядка, часто ее
необходимо преобразовать ее в эквивалентную систему первого порядка. Согласно теореме 1,
количество таких условий равно количеству уравнений в эквивалентной системе первого
порядка.
В задачах 1-10 преобразуйте данное дифференциальное уравнение или систему в эквивалентную
систему дифференциальных уравнений первого порядка.
1. х" + Зх' + 7x = t2
3. t2x" + tx' + (t2 - l)x = 0
5. x{3) = (ж'J + cos ж
kx
2. жD) + 6x" - 3x' + x = cos 3t
4. *V3) - 2t2x" + 3tx' + 5x = lnt
6. x" - 5x + 4y = 0, у" + Ax - 5y = Q
# =
2/ =—:
ky
(ж2 + 2/2K/2 " (s2 + 2/2K/2
8. x" + Зя' + 4ж - 2y = 0, ..у" + 2y'<-3x + y = cost
9. ж" = Зх - у + 2z, у" = ж + у - 4z, г" = 5ж - 2/ - z
10. х" = A-у)х9у" = A-хJ/
5 задачах 11-20, используя метод, примененный в примерах б, 7 и 8, найдите общие решения
систем. Если заданы начальные условия, найдите удовлетворяющее им частное решение. В
каждой задаче с помощью компьютерной системы или графического калькулятора постройте поле
направлений и типичные фазовые траектории данной системы.
= у,у =-х
= -22/, у' = 2х; х@) = 1,2/@) = 0
= hy, У' = -8я?
= 2/, у' = 6х - у; х@) = 1,2/@) = 2
= -У, у' = 13х + 42/; я@) = 0,2/@) = 3
= 2/, 2/' = -9я? + 62/
12. х' = у9у' = х
14. ж' = 102/, 2/' = -lte; я@) = 3, г/@) = 4
16. х' = 82/, 2/' = ~2х
18. х' = -2/, У' = Юя - 72/; х@) = 2,2/@) = -7
11. я
13. я
15. я
17. а:
19. х
20. а:
21. (а) Вычислите [#(£)]2+[2/@]2 и покажите>чт0 траектории системы х' — у, у' = —х из задачи 11
представляют собой круги. (Ь) Вычислите [х(£)]2 — [2/(*)]2> чтобы показать, что траектории
системы х' = 2/, у' = х из задачи 12 представляют собой гиперболы.
22. (а) Начав с общего решения системы х' = —2у, у' = 2х из задачи 13, вычислите х2 + у2,
чтобы показать, что траектории системы представляют собой окружности. (Ь) Аналогично
покажите, что траектории системьх х' = \у, у' = — 8х из задачи 15 представляют собой
эллипсы, заданные уравнением 16х2 + у2 = С2.
362 Глава 4. Введение в системы дифференциальных уравнений
23. Сначала выразите из уравнений B0) и B1) е~г и e2t через x(t), y(t) и постоянные А и В.
Затем подставьте полученные выражения в тождество (e2t)(e-tJ = 1 и тем самым покажите,
что траектории системы х' = у, у' = 2х + у из примера 7 удовлетворяют уравнению в виде
4х3 — Зху2 +у3 = С (постоянная).
Затем покажите, что при значении постоянной С = 0 получаются прямые у = — х и у = 2х,
изображенные на рис. 4.1.8.
24. Выведите уравнения
ггцх" = — (hi -f &2)#i + ta#2,
ГП2#2 = &2Ж1 ~~ (&2 + /сз)Ж2
которым удовлетворяют смещения (от положения равновесия) двух тел, изображенных на
рис. 4.1.11.
25. Две частицы, масса каждой из которых равна т, закреплены на струне, к которой приложено
постоянное растягивающее усилие Т (рис. 4.1.12). Предположим, что частицы колеблются
вертикально (т. е. параллельно оси у), причем амплитуды колебаний настолько малы, что синусы
изображенных углов приблизительно равны их тангенсам. Покажите, что смещения у\ и у2
удовлетворяют уравнениям
kyi = -2yi + у2, ky'i = l/i - 2^/2,
где к = mL/T.
Рис. 4.1.11. Система тел из за- Рис. 4.1.12. Механическая
дачи 24 система из задачи 25
26. Три бродильных чана на 100 галлонов соединены так, как показано на рис. 4.1.13. Смеси
в каждом из резервуаров тщательно перемешиваются и потому всегда однородны. Обозначим
через Xi(t) количество (в фунтах) алкоголя в резервуаре Т* в момент времени t (г = 1, 2,
3). Предположим, что смесь циркулирует между резервуарами со скоростью 10 галлонов/мин.
Выведите уравнения
Юх[ = — х\ + #з,
10#2 = xi — #2,
)
10х'3 = Ж2 — Жз-
27. Выведите систему дифференциальных уравнений первого порядка для токов в электрической
цепи, показанной на рис. 4.1.14.
28. Решите задачу 27 при условии, что генератор заменен на батарею, электродвижущая сила
которой равна 100 В, а катушка индуктивности заменена конденсатором емкостью 1 милифарада
(мФ).
4.1. Системы первого порядка и их приложения 363
E{t) = 100 sin 60/
-VW-
[ 2 генри I < 25 ом
Рис. 4.1.13. Бродильные чаны
из задачи 26
R\: 50 ом
Рис. 4.1.14. Электрическая цепь из
задачи 27
29. Частица массы га, координаты которой обозначены через (x(t) ny(t), движется в плоскости под
действием силового поля, в котором сила направлена в начало координат, а ее величина равна
к/(х2+у2). (Таким образом, данное силовое поле является центрально-симметричным, причем
центральная сила обратно пропорциональна квадрату расстояния между точкой и центром силы,
который совпадает с началом координат.) Покажите, что
тх = —-
кх
п ку
тУ =-7з'
30.
где г = yjx2 + у2.
Предположим, что снаряд массой т движется в вертикальной плоскости в атмосфере возле
поверхности Земли под действием двух сил — направленной вниз силы тяготения, величина
которой равна тд, и силы сопротивления Fr (направленной противоположно вектору скорости
v), величина которой равна kv2 (где v = |v| — скорость снаряда; рис. 4.1.15). Покажите, что
уравнения движения снаряда имеют вид
тх" = —kvx\ ту" — —kvy
тд,
где v = у/(х'J + (у'J.
31. Предположим, что частица, масса которой равна т, а электрический заряд равен q, движется
в плоскости ху под действием магнитного поля В = Вк. (это однородное поле, паралельное
оси z), так что сила, действующая на частицу, равна F = gv x В, где v — вектор скорости.
Покажите, что уравнения движения частицы имеют вид
тх" = +qBy , ту" = —qBx.
Рис. 4.1.15. Траектория снаряда из
задачи 30
364 Глава 4. Введение в системы дифференциальных уравнений
4.1. Приложение. Гравитация и движение планет,
законы Кеплера
В начале XVII столетия4 Иоганн Кеплер проанализировал результаты наблюдения движения
планет, которые были выполнены датским астрономом Тихо Браге5. Кеплер сделал вывод,
что движение планет вокруг Солнца определяется следующими тремя законами движения
планет, которые теперь называются законами Кеплера.
1. Орбита каждой планеты представляет собой эллипс, в одном из фокусов которого
находится Солнце.
2. Радиус-вектор, проведенный от Солнца к планете, описывает (заметает) площадь,
пропорциональную времени движения планеты6.
3. Квадрат периода обращения планеты вокруг Солнца пропорционален кубу большей
полуоси ее эллиптической орбиты7.
В своих Началах (Principia Mathematical 1687) Исаак Ньютон вывел из законов Кеплера
закон всемирного тяготения, согласно которому сила притяжения между двумя телами
обратно пропорциональна квадрату расстояния между ними. В этом приложении мы покажем,
как из закона тяготения, открытого Ньютоном, вывести первые два закона Кеплера8.
Предположим, что Солнце расположено в начале координат плоскости движения
планеты9 . Запишем радиус-вектор планеты в виде
r(t) = (a?(t),y(t))=ad+^j, A)
где! = (l,0)nj = @,1)—единичные векторы осей х и у. Согласно закону всемирного
тяготения, сила притяжения между двумя телами обратно пропорциональна квадрату расстояния
между ними и потому (задача 29) вектор ускорения планеты r"(t) задается равенством
'" = ~% B)
где г = у/х2 + у2 — расстояние от Солнца до планеты. Если полярные координаты планеты
в момент времени t равны (r(£), 6(t))9 то единичный полярный радиус (единичный вектор,
направленный вдоль радиус-вектора), и перпендикулярный ему единичный вектор (они
4 Примерно в 1609-1619 годах. — Примеч. ред.
5 Тихо Браге родился в Кнудструпе 14 декабря 1546 года, а умер 24 октября 1601 года в Праге. Значительную
часть своей жизни посвятил определению положения звезд и планет. Его наблюдения были наиболее точными
до изобретения телескопа. Кроме того, его работы способствовали развитию тригонометрии. — Примеч. ред.
6 Иными словами, секторная скорость каждой планеты относительно Солнца постоянна. — Примеч. ред.
7 Иными словами, отношение квадратов периодов обращения планет к кубам больших полуосей их орбит
постоянно и для всех планет одинаково. — Примеч. ред.
8 Задача, в которой требуется найти орбиты двух тел, силы взаимодействия между которыми определяются
законом обратных квадратов, называется задачей Кеплера. Задачу Кеплера решил Исаак Ньютон. — Примеч. ред.
9 Данное движение является плоским. Это следует из того, что движение происходит под действием
центральной силы и теоремы об изменении момента количества движения: производная по времени от момента
4.1. Системы первого порядка и их приложения
365
Рис. 4.1.16. Единичный
полярный радиус ur и
перпендикулярный ему единичный вектор ив
изображены на рис. 4.1.16) соответственно равны10
ur = icos#+ jsin# и \i$ = — isin#+ jcos0.
C)
Единичный полярный радиус ur, приложенный к планете, всегда направлен от начала
координат, а перпендикулярный ему единичный вектор щ получается из него вращением ur
против часовой стрелки на 90°.
Шаг 1. Продифференцируйте уравнения C) покомпонентно и покажите, что
dxir d6
л =щм и
due _ d6
~dT ~ ~UrH'
D)
количества движения материальной точки равна моменту равнодействующей сил, приложенных к ней.
(Конечно, момент количества движения и момент равнодействующей нужно брать относительно одного и того же
центра моментов.) Эта теорема часто называется также теоремой моментов количества движения. Теперь
докажем, что при движения материальной точки под действием центральной силы траектория движения есть
плоская кривая. Для этого удобно применить теорему об изменении момента количества движения, выбрав
в качестве центра моментов центр отталкивания или притяжения — ту фиксированную точку пространства,
через которую всегда проходит линия действия заданной центральной силы. Действительно, по теореме об
изменении момента количества движения, производная по времени от момента количества движения
материальной точки равна моменту равнодействующей сил, приложенных к ней. А момент равнодействующей
сил, равный векторному произведению радиуса-вектора на силу, в случае центральной силы равен нулю,
поскольку центральная сила коллинеарна радиусу-вектору. Значит, сам вектор момента количества движения G
постоянен. (Равенство G = С = const в теоретической механике часто называется первым интегралом
дифференциальных уравнений движения в векторном виде. Вектор С — постоянная интегрирования, определяемая
из начальных условий.) Поскольку момент G = [шг, V] перпендикулярен радиус-вектору г, то их скалярное
произведение равно нулю. А так как скалярное произведение Gr = 0, то движение происходит в плоскости,
векторное уравнение которой имеет вид Gr = 0. (Ведь G = С = const, и, значит, Gr = 0 — уравнение
плоскости.) Эта плоскость проходит через начало координат, ее нормаль коллинеарна вектору G, а сама
плоскость перпендикулярна вектору G. Утверждение доказано. Остается заметить еще, что координатная запись
уравнения плоскости Gr = 0 называется вторым интегралом дифференциальных уравнений движения. —
Примеч. ред.
10 Иными словами, векторы ur и и$ являются ортами полярной системы координат. — Примеч. ред.
366 Глава 4. Введение в системы дифференциальных уравнений
Шаг 2. Используя уравнения D), продифференцируйте радиус-вектор планеты г = rur
и таким образом покажите, что ее вектор скорости равен
_ dr _ dr dO
dt dt dt
E)
Шаг 3. Продифференцировав еще раз, покажите, что вектор ускорения планеты а = dv/dt
равен
■d2r /,лч21
а =
т
А5"
-(f)
ur +
1£
rdt
td0\
dt)
Щ-
F)
Шаг 4. Радиальные и перпендикулярные компоненты в правых частях уравнений B) и F)
должны совпадать. Приравняв перпендикулярные к радиус-вектору компоненты, получим
откуда следует, что
rdt\ dt) '
r^ = h,
dt
G)
(8)
где h — постоянная. Элемент площади в полярных координатах, который позволяет
вычислить площадь A(t), заштрихованную на рис. 4.1.17, равен dA = \r2dd. Поэтому из
уравнения (8) следует, что производная Af (t) постоянна, а это и есть второй закон Кеплера1*.
Шаг 5. Приравняйте радиальные компоненты уравнений B) и F), а затем с помощью
равенства (8), покажите, что расстояние планеты от начала координат (радиальная
координатная функция) г (t) удовлетворяет дифференциальному уравнению второго порядка
d2r h2 к
dt2
(9)
Шаг 6. Предположив, что уравнение орбиты можно записать в полярных координатах12
в виде г = г@), используя цепное правило и уравнение (8), покажите, что если г = 1/z, то
dr
~di
-77 = ~h
dz
11 Поскольку момент количества движения материальной точки равен удвоенной массе точки, умноженной на
вектор секторной скорости, то из постоянства момента количества движения материальной точки (первый
интеграл дифференциальных уравнений движения в векторном виде) следует постоянство вектора
секторной скорости. А поскольку секторная скорость измеряется плоскостным элементом, заметаемым радиусом-
вектором, то отсюда следует теорема площадей: если материальная точка движется под действием цен-
тральной силы, то ее секторная скорость — постоянный вектор. Вот эквивалентная формулировка этой
теоремы: при движении материальной точки под действием центральной силы ее радиус-вектор за
любые одинаковые промежутки времени описывает одинаковые плоскостные элементы. Второй закон Кеплера
является частным случаем теоремы площадей. (Заметьте, что и первый, и второй интегралы
дифференциальных уравнений движения были получены лишь в предположении, что на материальную точку действует
центральная сила; конкретный вид этой силы при выводе интегралов не имеет значения.) — Примеч. ред.
12 Мы уже вывели закон площадей г2 ^ —h. Поскольку полярный радиус положителен, то из закона площадей
следует, что полярный угол изменяется монотонно, если h ф 0. А тогда (по теореме о неявной функции)
функция, выражающая зависимость полярного угла от времени, т. е. функция в = 0(t), имеет обратную
функцию t = t{0). Из этого немедленно следует, что траектория движения может быть представлена в полярных
координатах уравнением вида г = г (в). — Примеч. ред.
4.1. Системы первого порядка и их приложения 367
{0.0(f))
КО), 0@))
Рис. 4.1.17. Площадь,
которую описывает
(заметает) радиус-вектор
Рис. 4.1.18. Эллиптическая орбита
L
1 -Ь е cos@ — а)'
перигелий которой равен г 1 = L/(l + e),
а афелий —гг = L/(l — e)
Продифференцировавеще раз, с помощью уравнения (9) покажите, что функция z{6)
= l/r@) удовлетворяет уравнению второго порядка
d2z _ k_
d02 +* ~~ h2'
Шаг 7. Покажите, что уравнение A0) имеет общее решение
A0)
z@) = Asin0 + Bcos0+-r.
/г
(И)
Шаг 8. Наконец, из уравнения A1) выведите, что г(в) = l/z{6) выражается формулой
L
г{в) =
l + ecos@-a)'
A2)
где е = Ch2/k9Ccosa = А, С sin а = В и L = /i2/fc. График уравнения A2) в полярных
координатах представляет собой коническое сечение, эксцентриситет которого равен е.
Это коническое сечение с фокусом в начале координат является эллипсом при 0 ^ е <
< 1, параболой — при е = 1 и гиперболой — при е > 1. Орбиты планет расположены
в ограниченной области (движения планет финитны) и, следовательно, являются эллипсами
с эксцентриситетом е < 1. Как показано на рис. 4.1.18, большая ось эллипса лежит на прямой
Шаг 9. Постройте несколько стандартных эллиптических орбит, заданных
уравнением A2) при различных значениях эксцентриситета, размерах и ориентациях. Чтобы
построить эллиптическую орбиту, эксцентриситет которой равен е, а половина фокального
параметра — L (рис. 4.1.18), повернутую на угол а, можно воспользоваться ее параметрическим
368 Глава 4. Введение в системы дифференциальных уравнений
Солнце ©
Рис. 4.1.19. Форма орбиты
кометы Галлея
заданием в прямоугольных декартовых координатах
x(t) = r(t) cos t, y(t) = r(t) sin t, Q^tu 2тг.
Эксцентриситет орбиты Земли приблизительно равен е « 0,0167, т. е. настолько близок
к нулю, что орбита является практически круговой (но Солнце находится в фокусе, а не
в центре), а значения эксцентриситетов орбит других планет варьируются от 0,0068 — для
Венеры и 0,0933 — для Марса, до 0,2056 — для Меркурия и 0,2486 — для Плутона. Однако
эксцентриситет орбит многих комет значительно больше. Например, эксцентриситет орбиты
кометы Галлея е « 0,97 (рис. 4.1.19I3.
4.2. Метод исключения
Самый простой подход к решению систем линейных дифференциальных уравнений состоит
в исключении неизвестных функций с помощью сложения двух уравнений, предварительно
умноженных на подходящие множители. Цель этой процедуры — последовательное
исключение неизвестных функций до тех пор, пока не останется лишь одно уравнение, содержащее
лишь одну неизвестную функцию. Это оставшееся уравнение обычно будет линейным
уравнением высшего порядка и часто может быть решено методами, описанными в главе 3. После
того как его решение найдено, другие неизвестные функции можно найти по очереди,
используя либо первоначальные дифференциальные уравнения системы, либо полученные
в процессе исключения неизвестных.
Метод исключения переменных для систем линейных дифференциальных
уравнений аналогичен методу решения системы линейных алгебраических уравнений с помощью
процесса исключения переменнных по одной до тех пор, пока не останется лишь одна
неизвестная и одно уравнение. Он удобнее всего при решении достаточно малых систем: тех,
которые состоят не более чем из двух-трех уравнений. Для таких систем метод исключения
является простым и четким подходом, не требующим обширных предварительных знаний
и громоздких вычислений. Но для больших систем дифференциальных уравнений, как и для
теоретического изучения, более удобными являются матричные методы, рассматриваемые
в главе 5.
Пример 1
Найдем частное решение системы
х' = 4х-3у, у' = 6х-7у, A)
которое удовлетворяет начальным данным х@) = 2, у@) = — 1.
13 Изложенный выше метод решения задачи двух тел с физической точки зрения содержит некоторые
упрощения. Не учитывается, например, притяжение Солнца планетой. С учетом этого притяжения задачу двух тел
можно решить, сведя ее к только что решенной нами задаче о движении одного тела. Для этого необходимо
рассматривать центр масс системы двух тел и их приведенную массу. — Примеч. ред.
4.2. Метод исключения 369
Решение Решив второе уравнение системы A) относительно х, получим
х=\у' + У, B)
откуда :
Теперь подставим эти выражения для жиж'в первое уравнение системы
A); получим
откуда после упрощения
г/" + Зг/'-10г/ = 0.
Характеристическое уравнение этого линейного дифференциального
уравнения второго порядка имеет вид
г2 + Зг - 10 = (г - 2)(г + 5) = 0,
так что общее решение дифференциального уравнения второго порядка
представляет собой функцию
y(t) = Cle2t + c2e-bt. D)
Теперь, подставив D) в B), получим
x(t) = ± BCle2t - 5c2e-5t) + | (Cle2t + c2e~bt);
иными словами,
x{t) = |Cle2t + |c2e-5t. E)
Равенства D) и E) задают общее решение системы A).
Из заданных начальных условий следует, что
х@) = |d + \с2 = 2
и что
у@) = ci + c2 = -1;
несложно решить эту систему уравнений и найти, что с\ = 2 и с2 = —3.
Следовательно, искомое решение представляет собой пару функций
x(t) = 3e2t - e~5t, г/@ = 2e2t - 3e~5t.
На рис. 4.2.1 изображены эта и другие фазовые траектории,
параметрические уравнения которых суть x(t) = |cie2* + \c2e~bt, y(t) = c\e2t +
+ c2e~bt при различных значениях постоянных с\ и с2. Это два семейства
кривых, которые напоминают гиперболы с одной и той же парой асимптот,
пересекающихся под углом, отличным от прямого. ■
370 Глава 4. Введение в системы дифференциальных уравнений
B,-1)
Рис. 4.2.1. Поле направлений
и фазовые траектории системы
х' = 4гс — Зу, у' = 6х — 1у из
примера 1
Замечание. Общее решение, заданное равенствами D) и E), можно рассматривать, как
пару или вектор (x(t), y(t)). Используя правило покоординатного сложения (и умножения
на скаляр) векторов, можно записать общее решение D) и E) в виде
(x(t),y(t)) = (|cie2t + |c2e-5t,cie2t + c2e~bt) =
= Cl(fe2V*)+c2(ie-5*,e-5t).
Это выражение представляет общее решение системы A) в виде линейной комбинации двух
частных решений
(*ьЫ = (§е2',е2*) и (х2,Ы = (К5*,е-5*). ■
Линейные операторы
В примере 1 с помощью специальной процедуры удалось исключить одну зависимую
переменную, выразив ее через другую. Теперь опишем систематический метод исключения. Для
этой цели удобнее всего воспользоваться операционной нотацией. Линейным
дифференциальным оператором порядка п с постоянными коэффициентами называется оператор
L = anDn + an^D71'1 + • • • + axD + а0, F)
где D обозначает операцию дифференцирования по независимой переменной t. Если L\
и L2 — два таких оператора, то их произведение Ь\Ь2 определяется следующим образом:
> ЬхЬ2\х\^Ыих\. G)
Например, если L\ = D + a, a L2 = D + Ь, то
LiL2[x] = (D + a)[(D + b)x] = D(Dx + bx) + a(Dx + te) =
= [D2 + (a + b)D+ab)x.
4.2. Метод исключения 371
(9)
На этом примере видно, что два линейных дифференциальных оператора с постоянными
коэффициентами можно перемножать так, как обычные многочлены относительно
"переменной" D. Из коммутативности умножения многочленов следует, что
_L1L2[x]=L2L1[x] (8)
в случае, когда требуемые производные функции x(t) существуют. Заметим, что, в
отличие от операторов с постоянными коэффициентами, линейные операторы с переменными
коэффициентами свойством коммутативности не обладают — см. задачи 21 и 22.
Любая система двух линейных дифференциальных уравнений с постоянными
коэффициентами может быть записана в виде
Lix + L2y = fi{t),
L3x + LAy=- f2{i),
где Li, L2, L3 и L±—линейные дифференциальные операторы (возможно различных
порядков), заданные равенствами типа F), а Д (t) и /2 (t)—заданные функции. Например, систему
дифференциальных уравнений A) из примера 1 можно записать в виде
(D - 4)яг + Зу = О,
-6x + (D + l)y = О,
гдеЬ! =D-4,L2 = 3,L3 = -6и£4 = £> + 7.
Чтобы исключить зависимую переменную х из системы (9), подействуем оператором L3
на первое уравнение и оператором L\ — на второе. Тогда получим систему
Ь3Ьгх + L3L2y = L3/1W,
ЬгЬ3х + LxL4y = L{f2(t).
Вычитая первое уравнение от второго, получим следующее (единственное) уравнение
{LXU ~ L2L3)y = Li/2@ - L3/i(t) A2)
с одной зависимой переменной у. Решив это уравнение, получим функцию у = y(t). Затем
подставим ее в какое-либо из исходных уравнений (9), решив которое, получим х = x(t).
В качестве альтернативы аналогичным образом можно исключить из исходной
системы (9) зависимую переменную у. В этом случае мы получим уравнение
A0)
(н)
(iiL4 ~ L2L3)x = £4/i(*) ~ LaMt),
(.13)
которое теперь можно решить относительно неизвестной функции х = х (t).
Заметим, что в левой части обоих уравнений A2)иA3) появляется один и тот же оператор
L\Li — LiLz. Это определитель-оператор
Li
Lz
L2
Li
= L1L4 — L2L3
A4)
системы (9). С помощью определителей уравнения A2)иA3) можно переписать так:
flit) L2
/а(*) Li
Li
Lz
1 Ll
| L3
L2
Li
L2
Li
X —
y =
Li
Lz
hit)
/2(*)
A5)
372 Глава 4. Введение в системы дифференциальных уравнений
Важно отметить, что определители в правой части уравнений A5) выражаются с помощью
операторов, действующих на функции. Уравнения A5) очень похожи на правило Крамера
решения системы двух линейных уравнений от двух (алгебраических) переменных и поэтому
их легко запомнить. Действительно, систему двух линейных дифференциальных уравнений
можно решить либо только что описанным методом последовательного исключения
переменных, либо с помощью непосредственного использования детерминантов в формулах A5).
Второй способ особенно прост в случае, когда система однородна (Д (t) = 0 и /2 (t) = 0), так
как в этом случае правые части уравнений A2), A3) и A5) равны нулю.
Пример 2
Найдем общее решение системы
(D-4)x+ Зг/ = 0,
-6х + (D + 7)у = 0.
Решение Определитель-оператор этой системы равен
(D - 4)(£> + 7) - 3 • (-6) = D2 + 3D - 10. A6)
Следовательно, уравнения A3) и A2) принимают вид
х" + За/ - 10х = 0,
у" + 3у'-10у = 0.
Каждое из этих уравнений имеет характеристическое уравнение
г2 + Зг - 10 = (г - 2) (г + 5) = 0,
откуда их (по отдельности) общие решения даются формулами
xtt) = аге2г + а2е~ы:,
A7)
Эти формулы содержат четыре произвольные постоянные а±9 d2, fei
и 62 Но, согласно теореме 1 раздела4.1, общее решение системы двух
дифференциальных уравнений первого порядка должно содержать только две
произвольные постоянные. Эту очевидную проблему следует
немедленно разрешить.
Причина подобного явления проста: между этими четырьмя
постоянными должны быть какие-то скрытые соотношения. Их можно
обнаружить, подставив решения A7) в какое-либо из уравнений системы A0).
Подставив в первое уравнение, получим
0 = х' - Ах + Зу =
= Baie2t - 5a2et) - 4(<це2* + a2e~5t) + 3(Ьге2г + 62e-5t);
иными словами,
0 = (-2ai + 3bi)e2t + (-9a2 + ЗЬ2)е
«-5t
4.2. Метод исключения 373
Но функциие2* ие 5t линейно независимы, откудаа\ = §Ъ\ иа2 = |Ъ2.
Следовательно, искомое общее решение имеет вид
,*(*) = |6ie2* + ±b2et, 2/@ =* he2t + b2e-5t.
Заметим, что полученный результат совдадает с общим решением
(формулы D) и E)), полученным в примере 1 другим методом. ■
Как видно из примера 2, процедура исключения переменных обычно приводит к
появлению лишних взаимно зависящих (а поэтому ненужных и нежелательных)
произвольных постоянных. Они должны быть исключены с помощью подстановки полученных
формул общего решения в одно или несколько исходных дифференциальных уравнений. Если
определитель-оператор в формулах A5) не равен тождественно нулю, то количество
независимых произвольных постоянных в решении системы (9) равно порядку определителя-
оператора, т. е. его степени как многочлена от переменной D. (Доказательство этого факта
приведено на с. 144-150 монографии Айнса по обыкновенным дифференциальным
уравнениям, изданной в Нью-Йорке в 1956 году (Е. L. Ince, Ordinary Differential Equations, New
York: Dover, 1956).) Таким образом, общее решение системы A0) из примера 2 содержит
две произвольные постоянные, так как его определитель-оператор D2 + 3D — 10 имеет
порядок 2.
Если определитель-оператор тождественно равен нулю, то система называется
вырожденной. Вырожденная система либо не имеет решений, либо имеет бесконечно много
решений. Например, уравнения
Dx- Dy = 0,
2Dx - 2Dy = 1
составляют систему, определитель-оператор которой тождественно равен нулю. Конечно,
эта система несовместна, и, следовательно, не имеет решений. Другой пример: уравнения
Dx + Dy= t,
2Dx + 2Dy = 2t
составляют систему, определитель-оператор которой также тождественно равен нулю.
Очевидно, эти уравнения эквивалентны; любое из них является следствием другого и его можно
считать избыточным (лишним). Поэтому любую непрерывно дифференцируемую функцию
можно подставить вместо х (t), а затем проинтегрировать полученное уравнение и таким
образом получить y(t). Грубо говоря, любая вырожденная система эквивалентна либо
несовместной (переопределенной) системе, либо системе, содержащей избыточные уравнения
(т. е. недоопределенной, поскольку число уравнений исходной системы равно числу
неизвестных).
Хотя приведенные выше процедуры и результаты описаны для систем двух уравнений,
их можно обобщить и на системы трех и больше уравнений. Для системы
- Ьцх + Li2y + Lisz = fi(t)9
L21x + L22y + L23z = f2(t), A8)
L31x + L32y + L33z = f3(t)
374 Глава 4. Введение в системы дифференциальных уравнений
трех линейных уравнений, неизвестная функция x(i) удовлетворяет одному линейному
уравнению
Lll
L21
£31
L12
L>22
L$2
^13
^23
L33
X =
fi(t) L12 Lis
/2 CO £22 £23
/з@ Ьз2 Ьзз
A9)
Другие неизвестные функции у = y(t) и z = z(t) удовлетворяют аналогичным
уравнениям. Однако для большей части систем более чем трех уравнений метод определителей-
операторов слишком трудоемкий и поэтому на практике не применяется.
Механические колебания
Механическая система обычно колеблется (вибрирует, осциллирует) одним или
несколькими способами. Методы, изложенные в этом разделе, можно использовать для анализа
"собственных мод колебаний" данной механической системы. Проиллюстрируем этот
подход на примере 3.
Пример 3
В примере 1 раздела 4.1 мы вывели уравнения
{D2 + 3)х + (-l)y = О,
-2х + (D2 + 2)у = О,
B0)
которым удовлетворяют смещения двух материальных точек на рис. 4.2.2.
Здесь / (t) = 0, так как мы предполагаем, что внешние силы на систему не
действуют. Найдем общее решение системы B0).
,*i=4.
fe = 2
Положения равновесия
у(й
Рис. 4.2.2. Система из
примера 3, состоящая из двух
материальных точек, закрепленных на
пружинах
Решение Определитель-оператор системы B0) равен
(D2 + 3)(D2 + 2) - (-1)(-2) = D4 + 5D2 + 4 - (D2 + 1)(D2 + 4).
Следовательно, x(t) и y(t) удовлетворяют уравнениям
(£>2 + 1)(£>2+4)я = 0,
(£>2 + 1)(£>2+% = 0.
B1)
4.2. Метод исключения 375
Корни характеристического уравнения (г2 4- 1)(г2 4- 4) = 0 равны г, —г,
2г и — 2г. Поэтому общие решения уравнений B1) имеют вид
x(t) = a\ cos t 4- аг sin t 4- fti cos 2t 4- 62 sin 2t,
y(t) = c\ cos £ 4- C2 sin t + di cos 2t 4- c?2 sin 2t.
Поскольку определитель-оператор имеет порядок 4, общее решение
должно содержать четыре (а не восемь) произвольных постоянных.
Подставив значения х(t) и y(t) из равенств B2) в первое уравнение
системы B0), получим
= (—а\ cos t — а>2 sin t — 4fei cos 2t — 462 sin2t) 4-
4- 3(ai cos t + a,2 sin t 4- 61 cos 2t 4- 62 sin 2t) —
— {c\ sin t 4- C2 sin £ + di cos 2£ + cfo sin 2t);
отсюда
0 = Bai — ci) cos t 4- Ba2 — C2) sin £ 4-
4- (-61 - di)cos2£4- (-62 - d2)sm2t.
Поскольку функции cos t, cos 2t, sin £ и sin 2t линейно независимы,
коэффициенты при них в последнем равенстве равны нулю. Следовательно,
с\ = 2ai, С2 = 2a2, d\ = —fei и cfe = —Ьг-
Отсюда следует, что искомым общим решением системы B0) будут
функции
x(t) = a\ cost + a,2 sint 4- fei cos2t 4- 62 sin2t,
y(t) = 2ai cos £ 4- 2a2 sin t — b± cos 2t — 62 sin 2t.
Уравнения B3) описывают свободные колебания механической системы, состоящей
из материальной точки, закрепленной на пружине (эта система изображена на рис. 4.2.2),
т. е. движение рассматриваемой системы при отсутствии внешних сил. Для определения
значений <ц9 аг, Ъ\ и &2 необходимы четыре начальных условия (обычно это начальные
координаты и скорости). Выражение
(x(t),y(t)) = ai(cost, 2cost) 4-a2(sint, 2sint) 4-
4- bi (cos 2t, — cos 2i) 4- 62 (sin 2t, — sin 2t),
представляющее собой линейную комбинацию частных решений, как раз и есть общее
решение системы дифференциальных уравнений B0). Более того, первые два из этих частных
решений (как и два последующих) описывают сходные с физической точки зрения
колебания тел.
376 Глава 4. Введение в системы дифференциальных уравнений
Действительно, с помощью обычных тригонометрических преобразований можем
записать
а\ cos t + а,2 sin t = A cos(t — a),
2ai cos t + 2a2 sin t = 2 A cos(£ —• a)
и
bi cos 2t + b2 sin 2t = В cosBt - /?),
-bi cos 2t. - b2 sin 2t = -B cosBt - /?)
гдеЛ = y/a\ + a§,tga = a^la^B = y^bf -bb|ntg/3 = &2/&1. Тогда уравнение B4) примет
вид
где частные решения
(я, у) = А(Х1,У1)+В(х2,У2),
(xi(t), 2/i(t)) = (cos(t — a),2cos(t — a))
B5)
B6)
Ы*), »(*)) = (cosBt - /?), - cosBt - /3))
B7)
описывают две собственные моды колебаний системы, состоящей из материальной точки,
закрепленной на пружине. Более того, благодаря им обнаруживаются две (круговые, или
циклические) собственные частоты ш\ = 1 и^ = 2.
Линейная комбинация в формуле B5) отображает произвольные свободные колебания
системы, состоящей из материальной точки, закрепленной на пружине, как суперпозицию
ее двух собственных мод колебаний с постоянными А, а, В и /3, которые определяются
начальными условиями. На рис. 4.2.3 (при а = 0) изображена собственная мода (xi, г/i),
заданная формулой B6), при которой две материальные точки движутся синхронно в одном
и том же направлении с одинаковой частотой колебаний и± = 1, но амплитуда тела массой rri2
вдваразабольше,чемтеламассойгп1(таккак2/1 = 2xi).Hapnc. 4.2.4 (при /3 = 0)изображена
собственная мода (#2,2/2% заданная формулой B7), при которой две материальные точки
движутся синхронно в противоположных направлениях с одинаковой частотой колебаний
о>2 = 2, причем амплитуды колебаний равны (так как г/2 = — #2)-
Рис. 4.2.3. Два тела
движутся в одинаковых направлениях,
каждое с частотой o;i = 1
3
2
1
£0
-1
-2
1 1 п
v2 = -cosBf) 1
{ЛЛЛЛЛЛЛЛЛ7
Шиппь
ЛлЩЛЛлЛЛ1
L V/ v VA/ \Jv\Jy\J\
*2 = cos B0
1 1 1 1
2тс Зтс
t
4тс
Рис. 4.2.4. Два тела движутся
в противоположных
управлениях с частотой а>2 = 2
4.2. Метод исключения 377
4.2. Задачи _
В задачах 1-20 найдите общие решения данных систем линейных уравнений. Если заданы начальные
условия, найдите удовлетворяющее им частное решение. В задачах 1-6 с помощью
компьютерной системы или графического калькулятора постройте поле направлений и некоторые фазовые
траектории данной системы.
= -х + Зу, у' = 2у 2. х' = х - 2у, у' = 2х - Зу
= -Зх + 2у, у' = -Зх + 4у; ж@) = 0, у@) = 2
= Зж - у, у' = 5ж - Зу; ж@) = 1, у@) = -1
= -Зж - 4у, у' = 2ж + у
= х + 9у, у' = -2х - by; х@) = 3, у@) = 2
= 4ж + у + 2t, у' = -2х Л-у 8. ж' = 2ж + у, у' = ж + 2у - е2
= 2х - Зу + 2 sin 2t, у' = ж - 2у - cos 2t
+ 2y' = 4ж + 5?/, 2ж' - у' = Зж; ж@) = 1, y@) = -1
-t
1. ж
3. x'
4. ж'
5. ж'
6. x'
7. ж'
9. ж
10. ж
И. 2у' - х' = х + Зу + е', Зж' - 4у' = ж - 15у + е
12. ж" = 6ж + 2у, у" = Зж + 1у 13. ж" = -5ж + 2у, у" = 2ж - 8у
14. ж" = -4ж + sin t, у" = 4ж - 8г/ 15. ж" - Зу' - 2ж = О, у" + Зж' - 2у = О
16. х" + 13у' - 4ж = 6sint, у" - 2х' - 9у = О
17. х" + у" - Зх' - у' - 2х + 2у = О, 2ж" + Зу" - 9ж' - 2у' - 4ж + 6у = О
18. ж' = ж + 2у + г, у' = 6ж — у, г' = —ж — 2у — z
19. ж' = 4ж — 2у, у' = —4ж + 4у — 2г, г' = —4у -f 4г
20. ж' = у + г + e_t, у' = ж + 2, г' = ж + у (Указание. Решите характеристическое уравнение
методом подбора корней.)
21. Пусть L\ — a\D2 + b\D + С\ и 1,2 = аг-О2 -f Ь2£>4- сг, причем все коэффициенты постоянны,
а функция x(t) дважды дифференцируема. Проверьте, что L\Lq,x = L2L1X.
22. Предположим, что L\x — tDx + ж и что Ь2ж = Рж + £ж. Покажите, что L\Lix ф L2L1X, т. е.
линейные операторы с переменными коэффициентами в общем случае не перестановочны.
В задачах 23-25 поколейте, что данные системы являются вырожденными. В каждой задаче
определите (попытавшись решить систему), имеет ли данная система бесконечно много решений
или не имеет их вообще.
23. (D + 2)x + (D + 2)y = e-3t, 24. (D + 2)ж + (D + 2)у = t,
(D + 3)x + (D + 3)y = e-2t (D + 3)x + (D + 3)y = t2
25. (D2 + bD + 6)ж + D(D + 2)y = 0,
(D + 3)ж + Dy = 0
В задачах 26-29 сначала вычислите определитель-оператор, а затем попытайтесь решить данную
систему, чтобы определить количество произвольных постоянных, которые содержит общее
решение.
26. {р2 + \)х + В2у^2е-\ 11. (£>2 + 1)ж + (D2 + 2)у = 2е"',
(D2 - 1)ж + D2y = 0 (D2 - 1)х + D2y = 0
28. (#2 + £>)ж + £>2у = 2е-*, 29. (D2 + 1)ж - D2y = 2е~\
(D2 - 1)ж + (D2 -D)y = 0 (D2 - 1)ж + £>2у = 0
30. Предположим, что в начальный момент времени t = 0 концентрация соли в обоих
резервуарах из примера 2 раздела 4.1 равна 0,5 фунтов/галлон. Решив систему E), приведенную
в разделе 4.1, определите количества соли x(t) и y(t) в резервуарах в момент времени t.
378 Глава 4. Введение в системы дифференциальных уравнений
31. Предположим, что электрическая цепь из примера 3 раздела 4Л первоначально разомкнута,
т.е. ток по ней не течет. Пусть ее замыкают в момент времени t = 0. Решив систему (9),
приведенную в разделе 4.1, найдите Ii(t) и hit).
32. Решите задачу 31 для электрической цепи из задачи 27 раздела 4.1.
33. Решите задачу 31 для электрической цепи из задачи 28 раздела 4.1. Пусть также Д@) = 2
и Q@) = 0, т. е. в момент времени t = 0 конденсатор не заряжен.
34. Три рассольных бака объемом по 100 галлонов соединены так, как изображено на рис. 4.1.13
раздела 4.1. Предположим, что в первом из баков содержится 100 фунтов соли, а два других
бака заполнены пресной водой. Найдите количества соли в каждом из трех баков в момент
времени t. (Указание. Рассмотрите уравнения, выведенные в задаче 26 раздела 4.1.)
35. В задаче 31 раздела 4.1 вы вывели уравнения движения частицы массой т с электрическим
зарядом q в однородном магнитном поле В = J5k:
тх ' — qBy , ту" = —qBx.
Пусть заданы начальные условия х@) = го, у@) = 0, ж'@) = 0 и г/@) = —ото, где oj =
= qB/m. Покажите, что траектория движения частицы представляет собой окружность
радиусом го.
36. Пусть на заряженную частицу из задачи 35, которая движется со скоростью v, кроме магнитного
поля В = B\l действует еще и однородное электрическое поле Е = Е\. Тогда на частицу
действует сила F = q(E + v X В). Предположим, что в начальный момент времени частица
покоится в начале координат. Покажите, что ее траектория представляет собой циклоиду
х = аA — cosotf), у = — a(u)t — sinotf),
где а = Е/(шВ) и ш = qB/m. График такой циклоиды изображен на рис. 4.2.5.
37. Предположим, что в системе из примера 3, состоящей из материальных точек, закрепленных
на пружинах, ггц = 2, т2 = 0,5, к\ = 75 и &2 = 25. (а) Найдите общее решение уравнений
движения системы. В частности, покажите, что ее собственные частоты равны ил = 5 и ui2 =
= 5л/3- (Ь) Опишите собственные моды колебаний системы.
38. Рассмотрим систему, состоящую из двух тел и трех пружин, которая изображена на рис. 4.2.6.
Выведите уравнения движения этой системы:
mix" = — (к\ + к2)х -+■ к2у
т2у" = к2х - (к2 4- к3)у.
Рис. 4.2.5. Траектория
движения частицы из задачи 36
представляет собой циклоиду
Положения равновесия
Рис. 4.2.6. Механическая
система из задачи 3 8
В задачах 39-46 найдите общее решение системы из задачи 38 при заданных массах материальных
точек и жесткостях пружин. Найдите собственные частоты механической системы и опишите
ее собственнные моды колебаний. Используя компьютерную систему или графический калькулятор,
проиллюстрируйте графически две собственные моды (как на рис. 4.2.3 и 4.2.4).
4.2. Метод исключения 379
39. пц = 4, Ш2 = 2, fci = 8, fe = 4, &з = О
41. 77li = 1, ТП2 = 1, &1 = 1, &2 = 4, &з = 1
43. 7711 = 1, 7712 = 1, к\ ='1, &2 = 2, кз — 1
45. 7711 = 1, 7712 = 2, fci = 2, &2 = 4, &3 = 4
40. mi = 2, m2 = 1, кг = 100, fc2 = 50, к3 = О
42. mi = 1,77i2 = 2, fci = 1, fc2 = 2, fc3 = 2
44. mi = 1,77i2 = 1, ki = 2, fe = 1, &з = 2
46. mi = 1,77i2 = 1, ki = 4, fe = 6, кз = 4
47. (а) Для системы, изображенной на рис. 4.2.7, выведите систему уравнений движения
тх" — —2кх -Ь ку
ту" = кх — 2ку -f kz
mz" — ку — 2kz.
(b) Предположим, что т = А; = 1. Покажите, что собственные частоты колебаний системы
Ь>1
= >/2, о;2 = у 2 - V5, и о;3 = у 2 -h V5.
48. Предположим, что частица движется в плоскости, причем её траектория (x(t),y(t))
удовлетворяет системе дифференциальных уравнений с начальными условиями
х" - 2у' + Зх = 0,
у" + 2х' + 3?/ = 0;
*@) = 4, 2/@) = *'@) = у'@) = 0.
Решите эту задачу. У вас должно получиться решение
x(t) = 3 cos t + cos 3£,
2/(t) = 3 sin t — sin 3£.
Проверьте, что эти уравнения задают гипоциклоиду, — кривую, которую рисует точка Р(х, у)
окружности радиуса 6=1, которая катится без скольжения по неподвижной окружности
радиуса а = 4 внутри ее. Если в момент времени t — 0 точка Р начинает свое движение из
точки А(а,0), то в качестве параметра t можно взять угол АОС, изображенный на рис. 4.2.8.
Рис. 4.2.7. Механическая
система из задачи 47
Рис. 4.2.8.
задачи 48
Гипоциклоида из
B)
380 Глава 4. Введение в системы дифференциальных уравнений
4.2. Приложение. Решение систем с помощью
компьютерной алгебры
Системы компьютерной алгебры можно использовать не только для решения отдельных
дифференциальных уравнений, но и для решения систем дифференциальных уравнений.
Рассмотрим, например, систему
dx dy :■ „
— =4х-3у, -±=6х-7у A)
из примера 1. Команда Марк
dsolve({diff(x(t),t) = 4*x(t) - 3*y(t),
diff (y(t),t) = 6*x(t) - 7*y(t)}, {x(t),y(t)});
дает результат
x(t) = iCai - 2a2)et + Ц-Зсц + 9a2)e2t,
y(t) = i(9ai - 6a2)et + \{-2<ц + 6a2)e2t
(после небольших упрощений), а команда системы Mathematica
DSolve[ {x1[t] == 4 x[t] - 3 y[t],
y'[t] == 6 x[t] - 7 y[t]}, {x[t],y[t]}, t ]
дает результат
x(t) = bxe-5t + 3&2e2t, y(t) = 36iet + 2b2e2t. C)
Очевидно ли вам, что общие решения B) и C) эквивалентны между собой и эквивалентны
общему решению
x(t) = |cie2t + \c2e~bt, y(t) = сге2г + c2et, D)
которое ранее было найдено в тексте? Каковы соотношения между постоянными ai, a2
в общем решении B), постоянными Ь\, 62 в общем решении C) и постоянными с\, с2 в общем
решении D)?
Теперь рассмотрим задачу Коши (задачу с начальными условиями)
а/' = _3х+ у, ж@)=0, х'@) = б,
у" = 2i - 2у, 2/@) = 0, у'@) = 6
для системы из примера 3, состоящей из тел, закрепленных на пружинах. Тогда команда
Maple
dsolve({diff(x(t),t,t) = -3*x(t) + y(t),
diff(y(t),t,t) = 2*x(t) - 2*y(t),
x@) = 0, y<0) = 0, D(x)@) - 6, D(y)@) = 6},
lx(t),y(t) });
и команда системы Mathematica
DSolve[{x'' [t] == -3 x[t] + y[t],
y" [t] == 2 x[t] - 2 y[t]f
4.3. Численные методы решения систем 381
х[0] == 0, у[0] == 0, х'[0] == 6, у'[0] « 6},
{x[t], y[t]}, t ] // ExpToTrig // Simplify
дадут один и тот же результат:
x(t) = 4 sin t + sin 2t, y(t) = 8 sin £ — sin 2t, F)
в котором без труда можно узнать линейную комбинацию
• колебаний с частотой 1, при которых два тела движутся синхронно, причем амплитуда
колебаний второго тела в два раза больше, чем у первого и
• колебаний с частотой 2, при которых два тела движутся в противоположных
направлениях, причем амплитуды колебаний равны.
Попробуйте аналогичным образом применить доступную вам систему компьютерной
алгебры для решения задач 1 -20 и 3 9-^Фб из этого раздела. В задачах 39-46, если хотите, можете
также найти частные решения, удовлетворяющие заданным начальным условиям.
43. Численные методы решения систем
Теперь рассмотрим численные методы для нахождения приближенных решений систем
дифференциальных уравнений. Наша цель—применить методы из разделов 2.4-2.6 к задаче
Коши (задаче с начальными условиями) вида
> x' = f(t,x), x(t0)=xo A)
для системы т дифференциальных уравнений первого порядка. В системе A) t — скаляр, а
X = (#i,X2,...,Xm) И f = (/l,/2,.-.,/m)
-векторнозначные функции. Если координатные функции f и все их частные производные
непрерывны в некоторой окрестности точки (to, xo), то, согласно теоремам 3 и 4 из
приложения, на некотором подынтервале [оси £], содержащем точку to, существует и единственно
решение х = х(£) системы A). Таким образом, мы можем приступить к рассмотрению
(следующей проблемы: найти численное приближение этого решения.
Выберем величину шага h. Мы хотим найти приближенные значения функции x(t)
р точках £ь ^2, £з, • • •»гДе ^n+i = tn + h для п ^ 0. Предположим, что мы уже вычислили
триближения
хъ х2> хз, ..., хп
^точным значениям
x(ti), x(t2), x(t3), ...', x(tn)
Ьочного решения системы A). Тогда, с помощью одного из методов, приведенных в разделах
1.4-2.6, можно сделать шаг от хп к следующему приближенному значению xn+1 « x(tn+1).
Ио существу нужно только записать итерационную формулу для выбранного метода в век-
рорном виде.
382 Глава 4. Введение в системы дифференциальных уравнений
Методы Эйлера для систем
Например, итерационная формула метода Эйлера в случае системы дифференциальных
уравнений имеет вид
> xn+i =xn + /if(*,xn). B)
В случае пары дифференциальных уравнений первого порядка (т. е. в случае т = 2), мы
пишем
х =
и f =
В этом случае задача Коши (задача с начальными условиями) A) примет вид
х' = f(t,x,y), x(t0) =х0,
y' = g{t,x,y), y(t0) = y0,
а скалярные компоненты векторной формулы B) будут иметь вид
#п+1 == %п "Г fljytni ^пч Уп)ч
Уп+i = Уп + hg(tn, xn, уп).
C)
D)
Заметим, что каждая итерационная формула в D) имеет тот же вид, что в одномерном методе
Эйлера, но теперь в первую формулу (для вычисления #n+i) входит уп в качестве параметра,
во вторую (для вычисления yn+i)—хп. Все остальные методы из разделов 2.4-2.6 на случай
системы C) обобщаются по такому же образцу.
Усовершенствованный метод Эйлера заключается в том, что сначала вычисляется
прогноз
> un+i = xn + hf(tn, xn), E)
а затем поправка
> xn+i = xn -f ~[f(tn,xn) + f(£n+i,un+i)]. F)
В случае двумерных задач Коши (задач с начальными условиями) C), скалярные компоненты
в формулах E) и F) имеют вид
vn+i = Уп + hg(tn, xn, yn)
Xn+i — Xn + 7r[/(£n,#n,2/n) + /(Wl>wn+l<^n+l)]5
Л (8)
2/n+i = Уп + -Ь(*п,я:п,Уп) + 0(*n+i»wn+i,tfn+i)]-
4.3. Численные методы решения систем 383
Пример 1
Рассмотрим задачу Коши (задачу с начальными условиями)
х' = Зх - 2у, х@) = 3;
у' = Ъх- %, 2/@) = 6.
Точное решение системы (9) дают функции
x(t) = 2e~2t + e\ y(t) = 5et + е*. A0)
Теперь в равенствах C) мы полагаем /(х, у) = Зх—2уид(х,у) = Ьх—Ау.
Поэтому итерационные формулы Эйлера D) примут вид
хп+1 =xn + h- (Зхп - 2yn), 2/n+i =yn + h- {Ъхп - Ауп).
При величине шага h = 0,1 получим
Ж1 = 3 + (ОД) • [3 • 3 - 2 • 6] = 2,7,
2/i = 6 + @,1) • [5 • 3 - 4 • 6] = 5,1
и
Х2 = 2,7 + @,1) • [3 • B,7) - 2 . E,1)] = 2,49,
2/2 = 5,1 + @,1) • [5 • B,7) - 4 • E,1)] = 4,41.
В точке ^2 = 0,2 фактические (истинные) значения решения A0) равны
ж@,2) « 2,562 и 2/@,2) « 4,573.
Теперь вычислим приблизительные значения х@,2) и 2/@,2)
усовершенствованным методом Эйлера за один только шаг. Для этого возьмем
величину шага h = 0,2. Сначала вычислим прогнозы
щ = 3 + @,2) • [3 • 3-2 • 6] = 2,4,
Vl = 6 + @,2) • [5 • 3-4 • 6] = 4,2.
Затем по формулам (8) для поправок вычисляем
ч
хх = 3 + @,1) • ([3 • 3 - 2 • 6] + [3 • B,4) - 2 • D,2)]) = 2,58,
yi = 6 + @,1) • ([5 • 3 - 4 • 6] + [5 • B,4) - 4 • D,2)]) = 4,62.
Как и следовало ожидать, за один шаг усовершенствованного метода
Эйлера удается получить более точное приближение, чем два шага обычного
метода Эйлера. ■
Четод Рунге-Кутта и уравнения второго порядка
рот векторный вид итерационной формулы метода Рунге-Кутта:
xn+i = xn + -(ki + 2k2 + 2k3 + k4), A1)
о
384
Глава 4. Введение в системы дифференциальных уравнений
где векторы кь кг, кз и к4 определяются (аналогично формулам Ea)-Ed) из раздела 2.6)
следующим образом:
*^1 — Ц%, Хп)>
к2 = f (tn + |ft, xn + |/iki),
к3 = f (tn + ^, xn + |ftk2),
k4 = f(tn -f ft, xn -f ftk3).
A2)
Для того чтобы найти скалярный вид формул метода Рунге-Кутта для двумерной задачи
Коши (задачи с начальными условиями)
х' = f(t,x,y),
У* = 9{t,x,y),
x(to) = жо,
у(*о) = 2/о
C)
запишем
х =
И ki =
Fi
Gi
Тогда итерационные формулы Рунге-Кутта для перехода от (хп, уп) к следующему
приближению (хп+1, j/n+i) « (a?(*n+i)»2/(*n+i)) будутиметьвид
*n+i = xn + -(Fi + 2F2 + 2F3 + F4),
о
Уп+i = 2/n + ^ (Gi + 2G2 + 2G3 + G4),
где значения Fi, F2, F3 и F4 функции / вычисляются по формулам
F\ = f{tn,xn,yn),
F2 = f (tn + |Mn + ^^Ы/п + \hGx),
F3 = /(tn + i/i,*; + |/iF2,y„ + \hG2),
F4 = /(tn 4- ft, xn 4- ftF3, y„ + ftG3),
A3)
A4)
а значения Gi, G2, G3 и G4 функции # вычисляются по аналогичным формулам.
Вероятно, двумерный метод Рунге-Кутта чаще всего применяется для численного
решения задач Коши (задач с начальными условиями) для дифференциального уравнения второго
порядка вида
х" — g(t,x,xr),
x(t0)=xo, x'(t0)
ЗЛ).
A5)
Введем вспомогательную переменную у = х'. Тогда задача A5) сведется к двумерной задаче
первого порядка
х = у,
УГ = 9{t,x,y),
x(t0) = жо,
У (to) = 2/0.
A6)
Эта задача имеет вид C) при /(£, х, т/) = у.
4.3. Численные методы решения систем 385
Если функции / и д не слишком сложны, то можно вручную выполнить необходимое
количество шагов для описанного здесь двумерного метода Рунге-Кутта. Однако первые
действующие электронные вычислительные устройства были созданы (во время Второй
мировой войны) специально для вычисления траекторий артиллерийских снарядов по
численным методам, очень похожим на метод Рунге-Кутта. В приложении к этому разделу
приведены две версии программы RK2DIM, которую можно использовать для решения
двумерных систем: одна — для калькулятора TI-85, а вторая — на языке BASIC.
Пример 2
Точным решением задачи Коши (задачи с начальными условиями)
х" = -х; х@) = О, х'@) = 1 A7)
является функция x(t) = sin t. Подстановка у = х' преобразует
уравнение A7) в двумерную задачу
х =у,
у' = -ж,
х@) = 0;
2/@) = 1,
A8)
которая имеет вид C) при /(£, х,у) = уи g(t, ж, у) = —х. В таблице на
рис. 4.3.1 приведены результаты для 0 ^ t ^ 5 (радиан), полученные с
помощью программы RK2DIM при величине шага h = 0,05. Все значения
х = sin t и у = cos t точны до пятого знака. ■
ши
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
iiliillHIilliliiiiilili
+0,47943
+0,84147
+0,99749
+0,90930
+0,59847
+0,14112
-0,35078
-0,75680
-0,97753
-0,95892
IPPiiiiiliifliiil1
+0,87758
+0,54030
+0,07074
-0,41615
-0,80114
-0,98999
-0,93646
-0,65364
-0,21080
+0,28366
Рис. 4.3.1. Значения,
полученные методом Рунге-Кутта (при
h = 0,05) для задачи A8)
Пример 3
В примере 4 раздела 2.3 мы рассматривали лунный посадочный модуль,
который в начальный момент времени находится в состоянии
свободного падения на поверхность Луны. Его тормозные двигатели в рабочем
состоянии обеспечивают замедление Т == 4 м/с2. Ранее мы нашли, что
мягкая посадка на поверхность Луны будет достигнута в том случае, если
386 Глава 4. Введение в системы дифференциальных уравнений
dx
^=4-
dx
я?@) = 1781870;
4,9044 х 1012
£2 ' у@) =
-450,
эти тормозные реактивные двигатели включить тогда, когда посадочный
модуль находится на высоте 41 870 метров (немного больше 26 миль) над
поверхностью Луны, причем в этот момент лунный посадочный модуль
снижается со скоростью 450 м/с.
Теперь мы хотим вычислить время спуска лунного посадочного
модуля. Пусть расстояние x(t) посадочного модуля от центра Луны измеряется
в метрах, а время t—в секундах. Согласно анализу, проведенному в
разделе 2.3 (где мы использовали обозначение r(t) вместо х(£)), x(t) является
решением задачи Коши (задачи с начальными условиями)
d2x GM 4,9044 х 1012
dt2 х2 х2 п9)
х@) = R + 41870 = 1781870, х'@) = -450,
где G « 6,6726 х 101 Н(м/кгJ —универсальная гравитационная
постоянная, а М = 7,35 х 1022 кг и R = 1,74 х 106 м — масса и радиус
Луны. Мы ищем значение t9 при котором x(t) = R = 1740 000.
Задача A9) эквивалентна системе уравнений первого порядка
B0)
Втаблиценарис.4.3.2приведенрезультатаппроксимацииметодомРунге-
Кутта при величине шага h = 1 (приведенные данные совпадают с
данными, полученным при величине шага h = 2). Очевидно, что посадка
на поверхность Луны (х — 1740 000) произойдет в некоторый момент
времени между t = 180 и t = 190 секунд. В таблице на рис. 4.3.3
приведены результаты следующего приближения методом Рунге-Кутта при
*@) = 180, х@) = 1 740 059, у@) = -16,83 и h = 0,1. Теперь очевидно,
что время спуска посадочного модуля к поверхности Луны очень
близко к 187 секундам, т. е. к 3 минутам и 7 секундам. (Последние значения
скорости в этих двух таблицах положительны, потому что посадочный
модуль начал бы подниматься, если бы его тормозные реактивные
двигатели не были выключены при посадке.) ■
Системы высших порядков
Как было показано в разделе 4.1, любая система дифференциальных уравнений
высшего порядка может быть заменена эквивалентной системой дифференциальных уравнений
первого порядка. Например, рассмотрим систему
х" = F(t,x,y,x',y'),
^ = G(t,*,t,,*',y') ( }
уравнений второго порядка. Если мы подставим
х — #Ъ У = х2, X =Хз=Х1? у = Х4 = Х2,
4.3. Численные методы решения систем 387
m^i
0
20
40
60
80
100
120
140
160
180
200
1781870
1 773 360
1 765 826
1759264
1 753 667
1749033
1 745 357
1742 637
1740872
1740059
1 740 199
ттштттттттштт
-450,00
-401,04
-352,37
-303,95
-255,74
-207,73
-159,86
-112,11
-64,45
-16,83
30,77
НИ
180
181
182
183
184
185
186
187
188
189
190
ШШШШШШШШШЯШ
ШШШШШШт
1740059
1740 044
1740 030
1740 019
1740 011
1740 005
1740001
1740000
1740001
1740004
1740010
ПИШИ
-16,83
-14,45
-12,07
-9,69
-7,31
-4,93
-2,55
-0,17
2,21
4,59
6,97
Рис. 4.3.2, Спуск посадочного
модуля на поверхность Луны
Рис. 4.3.3. Более подробные
данные по высоте и скорости при
мягкой посадке лунного
посадочного модуля
то получим эквивалентную систему
#1 = #3,
#3 = F(t1Xi,X2,X3,X4),
Х'4 = G(t,Xi,X2>X3,X4)
B2)
четырех уравнений первого порядка с неизвестными функциями x\{i) = x(t), X2(t) =
= y{i), #з (t) и Х4 (t). Писать четырехмерную версию программы RK2DIM для решения этой
системы—достаточно громоздкое и утомительное занятие. Но на языках программирования,
которые могут обрабатывать векторьэГ, программа n-мерной версии метода Рунге-Кутта едва
ли более сложна, чем одномерная. Например, в приложении к этому разделу приведена
программа г kn на входном языке системы MATLAB для решения n-мерных систем. Заметим,
что она почти не отличается от одномерной программы г к, приведенной на рис. 2.6.11.
Пример 4
Предположим, что бейсбольный мяч после удара вылетает из точки xq =
= 0> У о = 0 с начальной скоростью v0 = 160 футов/с под углом в =
= 30°. Если сопротивлением воздуха пренебречь, элементарными
методами из раздела 1.2 можно вычислить, что расстояние, которое пролетит
бейсбольный мяч по горизонтали до удара о землю, равно 400л/3 футов
(приблизительно 693 футов) и что полет займет 5 секунд. Теперь
предположим, что, кроме направленного вниз ускорения свободного падения
(д = 32 фута/с2), бейсбольный мяч испытывает ускорение из-за
сопротивления воздуха, равное @,0025)г>2 футов в секунду за секунду, причем
направление этого ускорения противоположно направлению движения.
388 Глава 4. Введение в системы дифференциальных уравнений
Определим, как далеко в горизонтальной плоскости переместится мяч
при этих условиях.
Решение Согласно задаче 30 из раздела 4.1, уравнения движения бейсбольного
мяча имеют вид
d2x dx d2y dy
-de = ~cvTt' de^-^Tt-9' B3)
где v = yj{x'J + (y'J — скорость мяча, с = 0,0025, a g = 32 в
единицах fps. Как и при выводе системы B2), преобразуем нашу систему
в эквивалентную ей систему первого порядка. Получим систему четырех
дифференциальных уравнений первого порядка
B4)
х1 =
/
х2 ~
хз -
Хд —
с начальными условиями
Заметим,
xi @)
*з@)
ЧТОЖз(£) KX4(t) —
= х3,
= х4,
= -CX3^3L
- —СХ4уХ
= х2@) =
= 80\/3,
просто х-
.2 I «,2
'3 ^ х4'
.2 _|_ rJl
'3 ^ х4
о,
х4@)
И у-К01
B5)
80.
бейсбольного мяча, и потому v = ух§-Ьж|.
При отсутствии сопротивления воздуха. На рис. 4.3.4 приведены
численные результаты, полученные с помощью программы для метода
Рунге-Кутта, такой как rkn при величине шага & = 0,1ис = 0
(сопротивление воздуха отсутствует). Для удобства физической интерпретации
на каждом шаге приведены горизонтальная и вертикальная координаты
мяча хиу9 его скорость v и угол наклона а его вектора скорости (отсчет
ведется в градусах от горизонтальной оси). Эти результаты совпадают
с точным решением при с = 0. Мяч пролетает горизонтальное расстояние
в 400\/3 « 692,82 футов в точности за 5 секунд, достигая максимальной
высоты 100 футов через 2,5 секунды полета. Заметим также, что скорость
мяча при ударе о землю равна его начальной скорости, а угол, под которым
мяч упадет на землю, равен начальному углу.
При наличии сопротивления воздуха. На рис. 4.3.5 изображены
результаты, полученные при достаточно правдоподобном значении
постоянной с = 0,0025 для сопротивления воздуха в случае бейсбольного
мяча. При величине шага h — 0,05 и h = 0,025 результаты совпадают
с точностью до одной сотой фута. При наличии сопротивлением
воздуха мяч пролетает существенно меньшее расстояние, чем 400 футов, за
4.3. Численные методы решения систем 389
t
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
т
0,00
69,28
138,56
207,85
277,13
346,41
415,69
484,97
554,26
623,54
692,82
If
0,00
36,00
64,00
84,00
96,00
100,00
96,00
84,00
64,00
36,00
0,00
^
160,00
152,63
146,64
142,21
139,48
138,56
139,48
142,21
146,64
152,63
160,00
а
+30
+25
+19
+13
+7
+0
-7
-13
-19
-25
-30
1И
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
шшшшш
0,00
* 63,25
117,11
.164,32
206,48
244,61
279,29
310,91
339,67
ШШШЁ::
0,00
32,74
53,20
63,60
65,30
59,22
46,05
26,41
0,91
:Ш11ШвШШ
160,00
127,18
104,86
89,72
80,17
75,22
73,99
75,47
78,66
1ШЯ1
+30
+24
+17
+8
-3
-15
-27
-37
-46
Рис. 4.3.4. Полет бейсбольного мяча при
отсутствии сопротивления воздуха (с = 0)
Рис. 4.3.5. Полет бейсбольного мяча,
испытывающего сопротивление воздуха
(с = 0,0025)
время, чуть большее 4 секунд. Более подробные данные, приведенные на
рис. 4.3.6, показывают, что мяч пролетит лишь около 340 футов, причем
максимальная высота приблизительно равна всего лишь 66 футам. Как
показано на рис. 4.3.7, сопротивление воздуха превратило выдающийся
удар (мяч попал бы точно в центр поля) в весьма посредственный. Заметим
также, что при ударе о землю скорость мяча немного меньше половины
его начальной скорости (всего лишь около 79 футов/с), причем мяч пада-
1,5
1,6
1,7
1,8
1,9
2,0
3,8
3,9
4,0
4,1
4,2
164,32
173,11
181,72
190,15
198,40
206,48
328,50
334,14
339,67
345,10
350,41
63,60
64,60
65,26
65,60
65,61
65,30
11,77
6,45
0,91
-4,84
-10,79
89,72
87,40
85,29
83,39
81,68
80,17
77,24
77,93
78,66
79,43
80,22
+8
+5
+3
' +1 т,
<—Высшая точка
-1
-3
-42
-44
-46
._47^~УДаР
-49
Рис. 4.3.6. Полет мяча: высшая точка и удар о землю
390 Глава 4. Введение в системы дифференциальных уравнений
Сильный удар
Рис. 4.3.7. Полет
бейсбольного мяча: точное попадание
в цель или упадет куда попало?
ет под более крутым углом (приблизительно 46°). Каждый бейсбольный
болельщик, конечно, из опыта хорошо знаком с этими особенностями
траектории полета мяча.
Методы с переменной величиной шага
Метод Рунге-Кутта для больших систем требует весьма большого объема вычислений,
даже если применяется компьютер. Поэтому, так же как нельзя выбирать слишком большую
величину шага h (потому что погрешность результата — решения — может быть больше
допустимой), нельзя выбирать и слишком маленькую величину шага, так как объем
вычислительной работы может превзойти имеющиеся вычислительные ресурсы. Таким образом,
на практике при применении численных методов решения дифференциальных уравнений
необходимо найти компромисс между точностью и эффективностью.
Чтобы не жертвовать точностью и не выполнять лишних вычислений, разработаны
современные методы с переменной величиной шага, в которых величина шага h может
изменяться в процессе вычисления решения. Большая величина шага выбирается там, где
зависимые переменные изменяются медленно; меньшая величина шага берется тогда, когда
эти переменные изменяются быстро, — это позволяет предотвратить большие ошибки.
Приспособленный для этой цели метод Рунге-Кутта называется адаптивным методом
Рунге-Кутта, методом Рунге-Кутта с выбором величины шага, или методом Рунге-Кутта
с переменной величиной шага. В этом варианте (или метода Рунге-Кутта используются
заданные наперед значения минимальной допустимой погрешности MinTol и максимальной
допустимой погрешности MaxTol для того, чтобы ошибка, допущенная на очередном щаге
при переходе от хп к хп+ъ была не слишком большой (что повлекло бы большую
погрешность результата) и не слишком малой (что повлекло бы неэффективность метода вследствие
слишком большого объема вычислений). Достаточно простая схема для приспособления
метода Рунге-Кутта выглядит следующим образом.
• Достигнув хп с помощью метода Рунге-Кутта при величине шага tn — £n_ i = h,
обозначим через х^1) результат продвижения методом Рунге-Кутта еще на один шаг величиной
/г, а через х^2) — результат продвижения методом Рунге-Кутта на два шага, величина
каждого из которых равна /г/2.
• Считая аппроксимацию х^2) более точной к действительному значению х(£п 4- h), чем
х^1), в качестве оценки допущенной ошибки при вычислении х^1) принимаем
£гг=|хA)-хBI-
4.3. Численные методы решения систем 391
• Если допущенная ошибка удовлетворяет неравенствам MinTol ^ Err ^ MaxTol, то
положим xn+i = х^, £n+i = tn H- h и перейдем к следующему шагу.
• Если допущенная ошибка Err < Min Tol, то считаем ошибку слишком маленькой!
Следовательно, положим xn+i = х^1), £n+i = tn H- h9 а величину шага на следующей итерации
удвоим (получим величину шага 2Ь).
• Если допущенная ошибки Err > MaxTol, то ошибка слишком велика. В этом случае
отбросим значение х^1) и попытаемся начать заново с хп, но перед этим уменьшим
величину шага вдвое, т. е. возьмем величину шага равной /г/2.
Детальная реализация такой схемы может быть значительно более сложной. Более
подробное, но вполне доступное обсуждение адаптивных методов Рунге-Кутта приведено
в разделе 15.2 монографии Уильяма X. Пресса, посвященной рецептурным тонкостям
применения численных методов (искусству научных вычислений), которая была выпущена
издательством Кембриджского университета в 1986 году (William H. Press et al., Numerical
Recipes: The Art of Scientific Computing (Cambridge University Press, 1986)).
В состав нескольких широко доступных пакетов для научных вычислений (таких как
Maple, Mathematica и Matlab) входят достаточно сложные программы с выбором
переменной величины шага, которые могут находить решение системы дифференциальных
уравнений практически произвольного порядка. Такие универсальные программы (программы
общего назначения) можно использовать, например, для численного моделирования
движения главных составных "частей" Солнечной системы: Солнца и девяти (известных) главных
планет. Обозначим через га* массу, а через г» = (ач, 2/i, 2») — радиус-вектор i-го из этих
десяти небесных тел. Тогда в соответствии с законом Ньютона уравнение движения тела
массой mi можно записать в виде
&i [Ггз)
где Tij = \tj — Ti | обозначает расстояние между rrii и rrij. Для всех г = 1, 2,..., 10 сумма
вуравнениях системы B6) берется по всем значениям j ф г от 1 до 10. Системе из 10
векторных уравнений B6) соответствует система из 30 скалярных дифференциальных уравнений
второго порядка, а эквивалентная система уравнений первого порядка состоит уже из 60
дифференциальных уравнений, содержащих координаты и компоненты скоростей этих 10
гаавных небесных тел в Солнечной системе. Математические модели с подобным (или
большим) количеством дифференциальных уравнений часто встречаются в различных отраслях
науки и техники. Системы дифференциальных уравнений такого (или большего) порядка
приходится решать не только при проведении научных исследований, но и при разработке
(проектировании) новых машин и технологий. Для получения числового решения таких
систем и его анализа требуется довольно сложное программное обеспечение.
i
Орбиты спутников системы, состоящей из двух небесных тел —
Земли и Луны
В качестве примера (научной) программы, для эффективной реализации которой
потребовались адаптивные методы с переменной величиной шага, рассмотрим орбиту искусственного
спутника Аполлон вокруг Земли -Б и Луны М. Начало системы координат х 1X2,
изображенной на рис. 4.3.8, совпадает с центром масс системы, состоящей из двух тел — Земли и Луны,
392 Глава 4. Введение в системы дифференциальных уравнений
/
/
/
/
/
/t
я(-м)
*2
S(*i.*2>
*
/ \
/ \
г£ / \
/ \
/ \
/ \
/ \ГМ
\
\
\
\
МA-ц,0) Х{
Рис. 4.3.8. Начало системы
координат находится в центре
масс системы, состоящей из
двух тел — Земли и Луны
причем эта система координат вращается с угловой скоростью один оборот за "лунный
месяц" (т. е. примерно за т = 27,32 дней). Вследствие этого вращения ось х\ можно выбрать
так, чтобы положения Земли и Луны были фиксированы на оси х\. За единицу расстояния
удобно выбрать расстояние между центрами Земли и Луны (будем считать его постоянным
и равным приблизительно 384 000 км). Тогда координаты планет будут следующие: у
Земли — E(—fi, 0), а у Луны — МA — /х, 0), где, считая массу Земли равной гпе, а массу Луны —
тм, ц = гпм/(гпе + гам). За единицу массы удобно принять общую массу Земли и Луны
гпе + гпм, а за единицу времени — т/Bтг) & 4,35 дня. Тогда в наших единицах
измерения гравитационная постоянная в уравнении B6) G = 1, а координаты спутника S(xi, X2)
удовлетворяют уравнениям движения
A -/x)(xi +/л) _ /x(xi - 1 + /л)
(геK (гмK
B7)
A - ц)х2 _ цх2
(геK (гмK '
где ге и гм обозначают расстояния от спутника до Земли и до Луны (как показано на
рис. 4.3.8). Два первых слагаемых в правой части каждого уравнения обусловлены
вращением системы координат14. В наших единицах измерения масса Луны приблизительно равна
гам = 0,012277471. С помощью подстановки
х[ = жз, х'2 = Х4 (так что х'[ — х'^ х2' = xf4)
система уравнений второго порядка B7) может быть преобразована в эквивалентную
систему четырех дифференциальных уравнений первого порядка.
14 Система координат, вращающаяся относительно инерциальной системы, является неинерциальной. В неинер-
циальной системе на тело действуют также силы инерции (переносная и кориолисова). Поэтому во втором
законе Ньютона для неинерциальной системы необходимо учитывать два дополнительных слагаемых —
переносную силу инерции и кориолисову силу инерции. Этим силам соответствует переносное и кориолисово
ускорение. В случае вращающейся системы координат нужно учитывать центростремительное и кориолисово
ускорения. — Примеч. ред.
Хл — Х\ ~т~ £ЗСо
4.3. Численные методы решения систем 393
1,5
1,0
0,5
0,0
-0,5
-1,0
-1Д
-
-
1 1
/""^Н---
i i
i i i
Земля
У
V '-,.0
Луна
i i i
1,5
1,0
0,5
0,0
-0,5
-1,0
,5-1,0-0,5 0.0 0,5 1,0 1,5
-1Д
1 1 1 1
/
- , ?
/ \ Земля
- '"-* ^-4;"'
\ ),
i i i i
i
-- .О
Луна
-<
i
1,5-1,0-0,5 0,0 0,5 1,0 1,5
Рис. 4.3.9. Орбита
искусственного спутника Аполлон
вокруг системы, состоящей
из двух небесных тел —
Земли и Луны, при начальной
скорости vq = 7476 км/ч
Рис. 4.3.10. Орбита
искусственного спутника Аполлон
вокруг системы, состоящей из
двух небесных тел — Земли
и Луны, при начальной
скорости vq = 7365 км/ч
Предположим, что спутник первоначально движется по круговой орбите радиуса 2400 км
вокруг Луны по часовой стрелке. В самой дальней точке его траектории от Земли (х\ = 0,994)
его "запускают" на орбиту вокруг системы, состоящей из двух тел — Земли и Луны, с
начальной скоростью г>о. Тогда соответствующие начальные условия можно записать так:
Ж1@) = 0,994, х2@) = 0, х3@) = 0, ж4@) = -v0.
Чтобы получить численное решение системы B7) с помощью пакета Matlab, можно
использовать адаптивный метод с переменной величиной шага ode4 5. Орбиты на рис. 4.3.9
и 4.3.10 были получены при
v0 = 2,031732629557 и v0 = 2,001585106379,
соответственно. (В наших единицах измерения, единица скорости равна приблизительно
3680 км/ч.) Хотя в каждом случае траектория вокруг Луны и Земли получается
замкнутая с многими циклами (нечто вроде петляющего автобусного маршрута), но даже
(относительно) незначительное изменение начальной скорости изменяет количество циклов!
Дополнительная информация содержится в докладе NASA, посвященном изучению
численных методов решения обыкновенных дифференциальных уравнений, подготовленном
О.Б.Фрэнсисом-мл. ссоавторами(О.В. Francis, Jr. е1а1.)дляЦентрауправленияКосмически-
ми полетами NASA (NASA-George С. Marshall Space Flight Center) 7 июня 1966 года (NASA
Contractor Report CR-61139, "Study of the Methods for the Numerical Solution of Ordinary
Differential Equations").
43^ JtoS™L_
Для решения задач 1-8 вполне подойдет карманный калькулятор. В каждой из задач даны задача
Кэши (задача с начальными условиями) и точное ее решение. Найдите приблизительные значения
х@,2) и 2/@,2) тремя способами: (а) с помощью метода Эйлера за два шага при величине шага
394 Глава 4. Введение в системы дифференциальных уравнений
h = 0,1; (b) с помощью усовершенствованного метода Эйлера за один шаг h — 0,2; (с) с помощью
метода Рунге-Кутта за один шаг при величине шага h = 0,2. Сравните полученные приближенные
значения с точными значениями х@,2) и у@,2).
1. х' = х + 2у, х@) = 0, 2. х' =t 2х + Зу, ж@) = 1,
у' = 2х + г/, 2/@) = 2; у7 = 2х + у, у@) = -1;
ж(*) = e3t - е"*, y(t) = e3t + e_t x(t) = e~\ y(t) = -e_t
3. x' = 3x + 4y, x@) = 1, 4. x' = 9x + 5y, x@) = 1,
у' = Зх + 2y, y@) = 1; у' = -6x - 2y, y@) = 0;
x(t) = i(8e6t - e"*), x(t) = -5e3t + 6e4t,
y(t) = ± Fe6t + e-*) • у(t) = 6e3t - 6e4t
5. x' = 2x - 5y, x@) = 2, 6. a:' = x - 2y, x@) = 0,
y' = 4x - 2y, y@) = 3; y' = 2x 4- y, y@) = 4;
x(t) = 2 cos U - ^ sin 4£, x(£) = -4e* sin 2t,
y(t) = 3 cos 4t + | sin 4* y(t) = 4e* cos 2t
7. ж' = Зх - у, ж@) = 2, 8. x' = bx - 9y, x@) = 0,
y' = x + y, y@) = 1; y' = 2x - y, y@) = -1;
ж(*) = (t + 2)e2t, x(*) = 3e2t sin 3*,
y(t) = (i + l)e2t y(t) = e2'(sin 3* - cos 3t)
Для решения остальных задач этого раздела необходим компьютер. В задачах 9-12 даны задача
Коши (задача с начальными условиями) и ее точное решение. В каждой их этих четырех задач
методом Рунге-Кутта с величиной шага h = 0,1 и h = 0,05 найдите приближения с пятью
десятичными знаками значений хA) иуA). Сравните аппроксимации с фактическими значениями.
9. х' = 2х - у, ж@) = 1, 10. х' - х + 2у, х@) = 0,
у' = х + 2у, у@) = 0; у'^ж + е-*, у@) = 0;
x(t) = е2'cost, ж(*) = U2e2t - 2е~г + 6*е-'), ,
y(t) = e2t sin t y(t) = |(e2t - e_t + 6te_t)
11. x' — -x - у - A + t3)e~*, x@) = 0, 12. x" + x = sint, x@) = 0;
y' = -x - у - (t - 3t2)e~', y@) = l; x(t) = |(sint - tcost)
x(t) = e_t(sin£-t), y(t) = e-t(cost + *3)
13. Предположим, что арбалетная стрела была пущена вертикально вверх с начальной скоростью
288 футов/с. Если ее торможение (замедление) из-за сопротивления воздуха равно @,04)v, то
ее высота x(t) является решением задачи Коши (задачи с начальными условиями)
ж" = -32 - @,04)ж'; ж@) = 0, ж'@) = 288.
Найдите максимальную высоту, которой достигает стрела, и время, требуемое, чтобы достичь
этой высоты.
14. Решите задачу 13, но предположите теперь, что торможение (замедление) стрелы из-за
сопротивления воздуха равно @,0002)г>2.
15. Предположим, что снаряд был запущен вертикально вверх с начальной скоростью г?о с
поверхности Земли. Если пренебречь сопротивлением воздуха, то высота снаряда x{t) в момент
времени t является решением задачи Коши (задачи с начальными условиями)
d2x _ gR2
dt2 (x + ЛJ '
ж@) = 0, ж'@) = «о.
Используйте значение ускорения свободного падения g = 32,15 футов/с2«0,006089 миль/с2 на
землю у ее поверхности и значение радиуса Земли R = 3960 миль. При г?о = 1 миль/с найдите
максимальную высоту высоту, достигнутую снарядом, и время, необходимое для подъема на
эту высоту.
4.3. Численные методы решения систем 395
В задачах 16-18 рассматривается бейсбольный мяч из примера 4, пущенный с начальной
скоростью 160 футов/с, причем коэффициент сопротивления воздуха равен с = 0,0025.
16. Найдите дальность — расстояние по горизонтали, которое мяч пролетит до падения на землю, —
и полное время полета, если угол наклона траектории в начальный момент был равен 40°, 45°
или 50°.
17. Найдите начальный угол наклона траектории (ближайшее целое значение в градусах), при
котором дальность полета будет максимальной. При условии отсутствия сопротивления воздуха
он был бы равен в точности 45°, однако ваш ответ должен быть меньше 45°.
18. Найдите начальный угол наклона траектории (с точностью до половины градусах), больший
45°, при котором дальность полета равна 300 футов.
19. Пусть с = 0,0025, а угол наклона траектории бейсбольного мяча, по которому ударила
малышка Бейб Рут (Babe Ruth), в начальный момент равен 40°. Найдите начальную скорость
бейсбольного мяча после удара, если мяч ударился в открытую трибуну на высоте 50 футов на
расстоянии 500 футов по горизонтали от точки удара.
20. Арбалетная стрела из задачи 14 выпущена с той же начальной скоростью 288 футов/с, причем
из-за сопротивления воздуха замедление (торможение) равно @,0002)г;2 и направлено против
движения. Предположим, что эта стрела запущена с уровня земли под углом 45°. Определите
максимальную высоту, дальность и продолжительность полета стрелы.
21. Артиллерийский снаряд запущен с уровня земли с начальной скоростью 3000 футов/с, причем
угол наклона траектории в начальный момент равен 40°. Предположим также, что замедление
(торможение) из-за сопротивления воздуха равно @,0001)г>2. (а) Какова дальность полета
снаряда и полное время его полета? Какова его скорость при соударении с землей? (Ь) Какова
максимальная высота подъема снаряда и когда эта высота достигается? (с) Вы
обнаружите, что в самой высокой точке своей траектории снаряд продолжает терять скорость. Какой
минимальной скорости достигает снаряд во время спуска?
4.3. Приложение. Кометы и космические корабли
На рис. 4.3.11 приведены две версии двумерной программы RK2DIM, реализующей метод
Рунге-Кутта. Одна версия предназначена для калькулятора TI-85, а вторая написана на языке
программирования BASIC. Вы должны обратить внимание, что эти версии очень похожи
на приведенные на рис. 2.6.11 аналогичные версии одномерной программы, реализующей
метод Рунге-Кутта, за исключением того, что (в соответствующих местах) одна строка
заменена двумя (для вычисления пары значений наклонов для функций х и у). Заметим
также, что используемая система обозначений по существу совпадает с уравнениями A3)
и A4) из этого раздела. В нескольких первых строках определены функции и начальные
данные из примера 1.
На рис. 4.3.12 приведена алгоритм реализации метода Рунге-Кутта для систем из п
уравнений на входном языке пакета Matlab. В функции f, написанной на входном языке пакета
Matlab, определяется вектор правых частей решаемой системы дифференциальных
уравнений вх' = f (t, х). Функция г kn в качестве входных параметров принимает начальное
значение t (параметр t), вектор-столбец начальных значений х (параметр х), конечное
значение t (параметр tl) и желаемое количество подынтервалов (параметр п). В результате
выполнения она генерирует вектор-столбец Т значений t и матрицу X, строки которой
задают соответствующие значения х. Например, если функция f определена так, как показано
на рисунке, команда Matlab
396 Глава 4. Введение в системы дифференциальных уравнений
TI-85
ИНШ
Комментарии
PROGRAM:RK2DIM
F=Y
G=-X
50-+N
0->T
0->X
1->Y
5->Tl
(Tl-T) /N->H
For(I,l,N)
T-+T0
X-+X0
Y-»Y0
F->F1
G->G1
T0+H/2-+T
X0+H*Fl/2-»X
Y0+H*Gl/2->Y
F->F2
G-»G2
X0+H*F2/2->X
Y0+H*G2/2->Y
F->F3
G-^G3
T0+H-+T
X0+H*F3->X
Y0+H*G3-»Y
F->F4
G->G4
(F1+2*F2+2*F3
+F4)/6-+FA
(G1+2*G2+2*G3
+G4)/6-+GA
X0+H*FA->X
Y0+H*GA->Y
Disp T,X,Y
End
Program RK2DIM
DEF FN F(T,X,Y) = Y
DEF FN G(T,X,Y) = -X
N = 50
T = 0
X = 0
Y = 1
Tl = 5
H = (Tl-T)/N
FOR 1=1 TO N
TO = T
XO = X
YO = Y
Fl = FNF(T,X,Y)
Gl = FNG(T,X,Y)
T = TO + H/2
X = XO + H*Fl/2
Y = YO + H*Gl/2
F2 = FNF(T,X,Y)
G2 = FNG(T,X,Y)
X =. XO + H*F2/2
Y = YO + H*G2/2
F3 = FNF(T,X,Y)
G3 = FNG(T,X,Y)
T = TO + H
X = XO + H*F3
Y = YO + H*G3
F4 = FNF<T,X,Y)
G4 = FNG(T,X,Y)
FA = (F1+2*F2+2*F3
+F4)/6
GA = (G1+2*G2+2*G3
+G4)/6
X = YO + H*FA
Y = YO + H*GA
PRINT T,X,Y
NEXT I
Заголовок программы
Определение функции f
Определение функции g
Количество шагов
Начальное значение t
Начальное значение х
Начальное значение у
Конечное значение t
Величина шага
Начало цикла
Сохранить предыдущее t
Сохранить предыдущее х
Сохранить предыдущее у
Первый наклон f
Первый наклон g
t в середине
Прогноз х в середине
Прогноз у в середине
Второй наклон f
Второй наклон g
Прогноз х в середине
Прогноз у в середине
Третий наклон f
Третий наклон g
Новое значение t
Прогноз х в конце
Прогноз у в конце
Четвертый наклон f
Четвертый наклон g
Средний наклон f
Средний наклон g
Поправка х
Поправка у
Вывод результатов
Конец цикла
Рис. 4.3.11. Программы, реализующие метод Рунге-Кутта для двумерных систем на
калькуляторе TI-85 и на языке BASIC
4.3. Численные методы решения систем 397
function
хр
= х;
хрA) =
хрB) =
function
h =
Т =
t
X =
for
: (tl
: t;
- х';
4 i =
kl =
k2 =
кЗ =
k4 =
к =
t =
x =
T =
X =
end
xp = f (t
xB);
-x(l);
[T,Y] =
- t)/n;
l:n
f(t,x);
f(t+h/2,
f(t+h/2,
f(t+h ,
,,x)
rkn(t,x,tl,n)
x+h
x+h
x+h
(kl+2*k2+2*
t + h;
x + h*k;
[T;t];
[X;x'];
*kl/2);
*k2/2);
*k3 ) ;
k3+k4)/6;
%
о.
"о
%
%
%
%
о.
о
1 %
%
%
%
%
%
%
величина шага
начальное значение
начальный вектор
начало цикла
первый вектор к
второй вектор к
третий вектор к
четвертый вектор
вектор средних к
новое значение t
новое значение х
обновить столбец
обновить матрицу
конец цикла
X
к
t
X
Рис. 4.3.12. Реализация метода Рунге-Кутта на входном языке пакета Matlab
[Т,Х] = rkn@, [0;1], 5, 50)
едерирует данные, приведенные в таблице на рис. 4.3.1 (приведено каждое пятое значение
временных).
Для проверки вашей собственной реализации метода Рунге-Кутта можно использовать
1римеры 1-3 из этого раздела. Затем решите задачи о кометах и приведенные ниже задачи
) космических кораблях. Дополнительный прикладной материал содержится также на сайте
f/ww. prenhall. с om/edwards. Сайт содержит описание дополнительных исследований
ю решению обыкновенных дифференциальных уравнений числовыми методами. В
качестве модельных задач рассматриваются самые разнообразные задачи — от задач о полете
5ейсбольного мяча до задач определения траекторий полета космического корабля Аполло-
ia (результаты этих вычислений — орбиты Аполлона — показаны на рис. 4.3.9 и 4.3.10).
Посадка вашего космического корабля
Ваш космический корабль движется с постоянной скоростью V, приближаясь к далекой
шанете земного типа, масса которой равна М, а радиус — R. Тормозная система вашего
космического корабля во включенном состоянии обеспечивает постоянную тягу Т до
соударения с поверхностью планеты. Во время замедления от вашего корабля до центра планеты
v(t) удовлетворяет дифференциальному уравнению
^ = т-™ A)
398 Глава 4. Введение в системы дифференциальных уравнений
гдеС « 6,6726 х Ю-11 Н(м/кгJ, как и в примере 3. Вы хотите узнать, на какой высоте над
поверхностью необходимо включить тормозную систему, чтобы посадка на планету была
мягкой? В качестве правдоподобной задачи можно взять
М = 5,97 х 1024 (кг),
R = 6,38 х 106 (м),
V = р х 104 (км/ч),
Г = <? + </(м/с2)
где д = GM/R2 ускорение свободного падения на поверхности планеты. Выберите в
качестве р наименьшую отличную от нуля цифру в номере вашего студенческого билета,
а в качестве q — следующую по величине. Найдите с точностью до метра высоту, на которой
необходимо включить тормозную систему, а также расчетное время спуска с точностью до
одной десятой секунды.
Движение планет и спутников: законы Кеплера
Рассмотрим движение спутника по эллиптической орбите вокруг планеты массой М.
Предположим, что единицы измерения выбраны так, что GM = 1 (где G — гравитационная
постоянная). Если планета расположена в начале координат плоскости ху, то уравнения
движения спутника можно записать в виде
d2x = х d2y = у
dt2 (х2+г/2K/2' dt2 (x2+y2f/2' W
Пусть Т обозначает период обращения спутника. Согласно третьему закону Кеплера,
квадрат Т пропорционален кубу большей полуоси а эллиптической орбиты спутника. В
частности, если GM = 1, то
Т2 = 4тг2а3. C)
Более подробные сведения приведены в разделе 12.6 6-го издания учебника анализа Эдвардса
и Пенни, вышедшего в 2002 году (Edwards and Penney, Calculus, 6th edition (Upper Saddle
River, N.J.: Prentice Hall, 2002)). Если ж- и у-компоненты скорости спутника обозначить через
х$ = х' = х'хъх± — у' — х'29 то система B) преобразуется в эквивалентную систему четырех
дифференциальных уравнений первого порядка, имеющую вид B2) из этого раздела.
(a) Решите численно эту систему размера 4 х 4 при начальных условиях
х@) = 1, у@) = 0, а/@) = 0, |/@) = 1,
которые теоретически соответствуют круговой орбите радиуса а = 1; тогда из
равенства C) следует, что Т = 27г. Это ли вы получили?
(b) Теперь решите численно эту систему при начальных условиях
х@) = 1, 2/@) = 0, s'@) = 0, 2//@) = |v/6,
которые теоретически соответствуют эллиптической орбите, большая полуось
которой равна а = 2; тогда из равенства C) следует, что Т = 47г\/2. Это ли вы получили?
4.3. Численные методы решения систем ч 399
Комета Галлея
В последний раз комета Галлея проходила через свой перигелий (ближайшая к Солнцу точка
орбиты) 9 февраля 1986 года. (Само Солнце считается расположенным в начале координат.)
Координаты и компоненты скорости кометы Галлея в тот момент были равны
ро = @,325514, -0,459460,0,166229) и
v0 = (-9,096111, -6,916686, -1,305721)
соответственно, причем расстояние здесь выражено в астрономических единицах длины —
а.е.д., или просто а.е. (астрономическая единица, т. е. длина большей главной полуоси земной
орбиты), а время — в годах. В этих единицах измерения трехмерные уравнения движения
кометы имеют вид
d2x _ /jlx d2y _ /лу d2z _ /jlz
~dt?~~~^' ~dt?~~^' ~d#~~~^' ()
где
^ = 47г2 и r = \Jx2 + y2 4- z2.
Решите численно систему уравнений D). Сверьте внешний вид проекции орбиты
кометы Галлея на плоскость yz с изображенным на рис. 4.13.13. Начертите также проекции на
плоскости ху и xz.
rU I 1 I I I I
Рис. 4.3.13. Проекция орбиты
кометы Галлея на плоскость yz
На рис. 4.3.14 изображен график расстояния г (t) кометы Галлея от Солнца. На графике
видно, что при прохождении через афелий (наиболее удаленная от Солнца точка орбиты)
комета Галлея будет удалена на максимальное расстояние от Солнца, приблизительно
равное 35 а.е., причем расстояние от перигелия до афелия комета Галлея преодолевает за время,
немного меньшее, чем 40 лет, и снова вернется в перигелий примерно через три четверти
века (после предыдущего прохождения перигелия). На увеличенном участке графика,
приведенном на рис. 4.3.15, видно, что период обращения кометы Галлея приблизительно равен
76 лет. Используйте ваше численное решение для уточнения этих данных. Постарайтесь
наиболее точно вычислить календарную дату следующего прохода кометы Галлея через ее
перигелий?
Ваша собственная комета
В ночь перед вашим днем рождения в 1997 году вы установили свой телескоп на вершине
недалёко расположенной от вашего дома горы. Ночь была ясной, безоблачной, звездной и вам
улыбнулась фортуна: в 0 часов 30 минут НОЧИ вы заметили новую комету. После повторных
400 Глава 4. Введение в системы дифференциальных уравнений
30 к
2оР
\
\ /
/
25
50
75
100
125
150
175
200 t
Рис. 4.3.14. График расстояния r(t) от кометы Галлея до Солнца на
протяжении 200 лет. Есть ли пересечение около точки t = 75?
15
10
5
г
X.
_ X /
1
74
\/
. V ,
75 . 76 77 78 '
Рис. 4.3.15. Увеличенный участок
графика при проходе кометы Галлея через
перигелий приблизительно через 76 лет
наблюдений в следующие ночи вам удалось вычислить ее координаты в ту первую ночь:
координаты в гелиоцентрической системе координат: ро = (#о> Уо, ^о) и вектор скорости
vo = (vxo, vyo, vzo). Используя эти данные, определите,
• расстояние кометы от Солнца в перигелии (самая близкая к Солнцу точка орбиты) и в
афелии (самая дальняя от Солнца точка орбиты);
• скорости кометы при прохождении через перигелий и через афелий;
• период обращения кометы вокруг Солнца;
• следующие две даты прохождения кометы через перигелий.
Если измерять расстояние в астрономических единицах, а время — в годах, то уравнения
движения кометы примут вид D). Для вашей собственной кометы выберите произвольные
начальные координаты и скорости того же порядка, что и у кометы Галлея. В случае
необходимости повторно осуществляйте произвольный выбор начального положения и вектора
скорости до тех пор, пока не получите правдоподобную эксцентрическую орбиту,
выходящую за пределы орбиты Земли (как у большинства настоящих комет).
к\ \ \ \ \
V. чЧ \ \\\
^^*ьХ ^
/rf f^
« t\ т ir il
MM ii
'il il 1 U & vl
■ii il i, \i vu
.iiui vW
r^
Х\^-.--^.<
*№
лЛ\ \ n n ^_
I JI f\ D f\
Линейные системы
дифференциальных
уравнений
5.1. Матрицы и линейные системы
Хотя простые методы исключения раздела 4.2 позволяют найти решение маленьких
линейных систем с постоянными коэффициентами, содержащих только два или три
уравнения, общие свойства линейных систем, а также методы решения больших систем
легче всего (и наиболее компактно) можно представить, только используя язык и систему
обозначений векторов и матриц. Для того чтобы быстро вспомнить обозначения и основные
результаты, в начале этого раздела приведен достаточно завершенный и независимый
обзор матричной системы обозначений и необходимой терминологии. Специальные методы
линейной алгебры, особенно те, которые связаны с собственными значениями и
собственными векторами, будут представлены по мере необходимости в последующих разделах этой
главы.
Обзор матричной системы обозначений и терминологии
Матрица размера т х п — прямоугольный массив ran чисел (или элементов), который
состоит из га (горизонтальных) строк и п (вертикальных) столбцов:
an
«21
«31
«a
«ml
«12
«22
«32
«г2
«m2
«13 *
«23 *
«33 *
«гЗ
«т3 *
• * «lj '
• • a3j •
aij
Q"mj
•• ai
•• «2
•• «з
«гэ
«m
A)
402 Глава 5. Линейные системы дифференциальных уравнений
Обычно матрицы мы будем обозначать прописными жирными буквами. Иногда мы будем
использовать сокращение А = [ау ] дляматрицысэлементомаувг-йстрокеи^'-м столбце,
как в равенстве A). Нулевую матрицу, каждый элемент которой равен нулю, мы обозначаем
0 =
о о
о о
о о
B)
Фактически для каждой пары положительных целых чисел тип существует своя нулевая
матрица размера т х п, но единственный символ 0 используется для обозначения всех этих
нулевых матриц.
Говорят, что две матрицы размера m x n A = [а^]иВ= [bij] равны, если равны их
соответствующие элементы; т. е. если а^ = Ь^ для 1 ^ г ^ ти1 ^ j ^ п. Чтобы сложить
А и В, мы складываем соответствующие их элементы:
А 4- В = [ а^ ] + [ b^ ] = [ а^ + bij ]
C)
Таким образом, элемент на пересечении г-й строки и j-ro столбца матрицы С = А + В
равен с^ = а^ + b^. Чтобы умножать матрицу А на число с, мы просто умножаем каждый
из ее элементов на с:
с А = Ас = [caij].
D)
Пример 1
Если
А =
то
А + В
В =
-3
7
-13 10
7 -5
+
-13
7
10
-5
и С =
-11
11
6С = 6
3 0
5 -7
18 0
30 -42
Мы обозначаем (—1)Ачерез — А и определяем вычитание матриц следующим образом:
А - В = А + (-В). E)
Только что определенные матричные операции имеют следующие свойства, каждое из
которых походит на знакомое алгебраическое свойство системы вещественных чисел:
А + 0 = 0 + А = А, А-А = 0;
А+В=В+А
А + (В + С) = (А + В) + С
с(А + В) = сА + сВ,
(c + d)A =cA + dA.
(коммутативность);
(ассоциативность);
(дистрибутивность)
F)
G)
(8)
(9)
5.1. Матрицы и шнеййые системы 403
Каждое из этих свойств легко проверяется поэлементным сравнением матриц с учетом
соответствующего свойства вещественных чисел. Например, ац 4- Ьц = bij + a^ для всех
% и j, потому что сложение вещественных чисел коммутативно. Следовательно,
А + В = [ ciij + b^ ] = [ b^ + a,ij] — В + A.
Матрица Ат, транспонированная к матрице размера га х п А = [а#] — это матрица
размера пхт (заметьте!) j-й столбец которой—это j-я строка матрицы А (и следовательно,
ее г-я строка — это г-й столбец матрицы А). Таким образом, Ат = [ а^ ], хотя это и не
идеально с точки зрения введенной системы обозначений; вы должны помнить, что Ат
имеет тот же самый размер, что и А, только если она квадратная матрица, т. е. только если
га = п. ,
Матрица размера га х 1 — это матрица, имеющая только один единственный столбец.
Такую матрицу называют вектором-столбцом, или просто вектором. Мы часто обозначаем
векторы-столбцы жирными строчными буквами1, вот так:
Ь =
ИЛИ X =
х2
Точно так же вектор-строка — это матрица размера 1 х п, имеющая только одну
единственную строку, например, с = [ 5 17 0 —3 ]. По эстетическим и типографским
причинам мы часто записываем вектор-столбец как результат транспонирований Виктора-
строки; например, два предыдущих вектора-столбца могут быть написаны в виде
Ь=[3 -7 0]'
[xi
Х2
f-
Иногда удобно записать матрицу размера гпхп как состоящую из га векторов-строк или
из ее п векторов-столбцов. Таким образом, если мы пишем
А =
это значит, что ai, аг,.
столбцы матрицы В.
ai
а2
am
И В = [ Ь>!
Ьп ] ,
и а™ — векторы-стярокм матрицы А и bi, Ьг,... и bn — векторы-
Матричное умножение
Свойства, перечисленные в тождествах F)-(9), весьма естественны и ничего необычного
внижнет. Первые неожиданности в царстве матричной арифметики связаны с умножением, v
Сначала мы определим скалярное произведение вектора-строки а и вектор-столбца Ь, если
каждый из этих векторов имеет то же самое число р элементов. Если t
а = [ CL\ CL2
Op]
[h b2
bp] ,
Иными словами, буквами на нижнем регистре. — Примеч. ред.
404 Глава 5. Линейные системы дифференциальных уравнений
то а • b определяется следующим образом:
а • b = 2^ dkbk = a\bi 4- а2&2 Н Ь o,pbpi
A0)
fc=i
точно так, как скалярное произведение двух векторов, знакомое из элементарного курса
аналитической геометрии.
Произведение АВ двух матриц определено только тогда, когда число столбцов А равно
числу строк В. Если А — матрица размера т х р и В — матрица размера р х п, то их
произведение АВ является матрицей размера га х п С = [ Qj ], где сц — скалярное
произведение г-го вектора-строки а^ матрицы А на j-й вектор-столбец hj матрицы В. Таким
образом,
С = АВ = [ а* • hj ] .
(И)
Пользуясь обозначениями элементов матриц А = [ ai j ] и В = [ Ьц? ], равенство A1) можно
записать в форме
cij — / ^ QikUkj-
A2)
fc=l
Для ручного вычисления определение из уравнения A1) и A2) просто запомнить,
представляя
an ai2
«21 «22
«ml «m2
a\p
«2p
Q"mp
hi bi2
&21 &22
Vpl Op2
hj
uP3
T
0\n
b2n
vpn
Это показывает, что для того, чтобы получить элемент сц, стоящий на пересечении г-й строки
и j-ro столбца произведения АВ, нужно взять скалярное произведение вектора-строки а*
на вектор-столбец hj. Это можно представить как "слияние строки А со столбцом из В".
Это также напоминает, что число столбцов матрицы А должно быть равно числу строк
матрицы В.
Пример 2
Проверьте, правильно ли вы понимаете определение матричного
умножения, проверив, что если
то
АВ =
2
1
2
1
-3
5
-3"
5
И В:
3 9"
4 0
13 9]
4 oj
4 18
7 -9
5.1. Матрицы и линейные системы 405
Подобно этому, проверьте, что
и что
2
4
6
-3
5
-7
1"
-2
0
X
У
z
=
1 2
3 4
5 6
7 8
1 3
3 -2
2я - Зу + z 1
4# + 5у — 2z
6х — 7у J
7 -1
2 15 1
4 23 3
6 31 5
Прямым (хотя и длинным) вычислением, основанным на определении, можно показать,
что матричное умножение ассоциативно и дистрибутивно относительно матричного
сложения; иными словами,
А(ВС) = (АВ)С
A3)
А(В + С) = АВ + АС,
A4)
при условии, что матрицы имеют такие размеры, что указанные умножения и сложения
определены.
Но матричное умножение не коммутативно. Иными словами, если А и В — две матрицы
размера п х п (так что оба произведения АВ и ВА определены и результаты умножения
имеют тот же самый размер — пхп), то, вообще говоря,
АВ ф ВА.
Кроме того, может случиться, что
АВ = О даже при том, что А ф О и В ф О.
A5)
A6)
Примеры, иллюстрирующие равенства A5) и A6) могут быть найдены в задачах, хотя вы
яегко можете придумать ваши собственные примеры матриц размера 2 х 2 с маленькими
целочисленными элементами.
Обратные матрицы
Квадратная матрица размера пхппо определению имеет порядок п. Единичная матрица
порядка п — это квадратная матрица
1 =
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0 •
0 •
0 •
1 •
0 •
• 0
• 0
• 0
• 0
• 1
A7)
406 Глава 5. Линейные системы дифференциальных уравнений
в которой каждый элемент на главной диагонали равен 1, а все недиагональные элементы
являются нулевыми. Весьма просто проверить, что
> А1 = А = 1А A8)
для любой квадратной матрицы А того же самого порядка, что и I.
Бели А—квадратная матрица, то обратная к А квадратная матрица В имеет тот же самый
порядок, что и А, причем выполнены оба равенства
АВ = 1 и ВА = 1.
Нетрудно показать, что если матрица А имеет обратную матрицу, то эта обратная матрица
единственна. Следовательно, мы можем говорить о матрице, обратной к А, как об однозначно
определяемой по матрице А, и мы обозначаем матрицу, обратную к матрице А, через А-1.
Таким образом,
> АА = I = А А, A9)
если существует А~г. Ясно, что некоторые квадратные матрицы не имеют обратных,
включая и любую квадратную нулевую матрицу. Также просто показать, что если А ~1 существует,
то существует (А) и (А^1)-1 = А.
В линейной алгебре доказывается, что А~г существует тогда и только тогда, когда
детерминант det( А) квадратной матрицы А отличен от нуля. Если это так, матрица А называется
несингулярной (неособойJ; если det(A) = 0, то матрица А называется сингулярной
(особойK матрицей.
Детерминанты
Мы предполагаем, что вам уже приходилось вычислять детерминанты матриц размеров
2х2иЗхЗв предшествующих курсах. Если А = [ ац? ] — матрица размера 2 х 2, то ее
детерминант det(А) = |А| определен как
|А| =
an ai2
Q>2\ «22
«11«22 — «12«21-
Детерминанты высших порядков могут быть определены по индукции следующим образом.
Пусть А = [ ац ] — матрица размера п х п. Тогда обозначим через А^ матрицу размера
(п — 1) х (п — 1), полученную из А вычеркиванием ее г-й строки и ее j-ro столбца.
Разложение детерминанта | А| по его г-й строке дает формула
п
| А| = ^2(—l)l+:j dij \Aij | (г фиксировано), B0а)
а его разложение по его j-му столбцу дается формулой
п
| А| = ]Г}(--1)^аг:> | Ay | (J фиксировано). B0b)
г=1
2 А также неособенной и невырожденной. — Примеч. ред.
3 А также особенной и вырожденной. — Примеч. ред.
5.1. Матрицы и линейные системы 407
В линейной алгебре доказывается, что какую бы строку мы ни использовали в
равенстве B0а), и какой бы столбец мы ни использовали в равенстве B0Ь), результаты будут
теми же самыми во всех 2п случаях. Следовательно, определение детерминанта | А| этими
формулами приемлемо с логической точки зрения.
Пример 3
Еели
3
4
-2
1
2
3
то разложение | А| по его второй строке имеет вид
|А| = -4-
1 -2
3 5
+ 2.
3 -2
-2 5
-1
3
-2
4
2
?,
3
-1-
3
-2
1
3
+ ь-
3
4
1
2
= -4-11 + 2-11-1-11 = -33.
А разложение | А| по его третьему столбцу выглядит так:
|А| = -2 -
= -2 -16 - 1 • 11 + 5 • 2 = -33. ■
Калькуляторы и компьютеры удобны для вычисления детерминантов и обратных матриц
более высоких порядков, но детерминанты матриц и обратные матрицы размера 2x2 просто
вычислить и вручную. Например, если детерминант матрицы размера 2x2
а Ь
с d
отличен от нуля (| А| =ad — bc^ 0), то обратная к ней матрица
A-* =
d
-с
B1)
Обратите внимание, что матрица в правой части равенства B1) получена из А
обращением порядка следования диагональных элементов и изменением знаков недиагональных
элементов.
Пример 4
Если
А =
6 8
5 7
то|А| = 6-7 — 5-8 = 2. Следовательно, уравнение B1) дает
A-x=-i
7 -8
-5 6
2 *
2 6
408
Глава 5. Линейные системы дифференциальных уравнении
Сейчас вы должны самостоятельно проверить, что
А-ХА =
2 *
2 6
6 8
5 7
1 0
О 1
Матричные (матричнозначные) функции
Матричнозначная функция, или просто матричная функция, — это матрица, например
*(*) =
яя(«)
а*(«)
ж„(*)
B2а)
или
А(«)
an(t)
Q>2l{t)
a«mi(t)
ai2(t) •
аггОО *
am2(£) *
• aln(t)
' Q>2n{t)
Qjmn\tJ
B2b)
в которой каждый элемент является функцией t. Мы говорим, что матричная функция A(t)
непрерывна (или дифференцируема) в точке (или на интервале), если каждый из ее
элементов имеет то же самое свойство. Производная дифференцируемой матричной функции
определена поэлементным дифференцированием; т. е.
а'")^
ddij
~dT
B3)
Пример 5
Если
то
х(<) =
dx.
~dt
Правила дифференцирования
. 1
2*
и A(t)
и А'(«) =
sint 1
t cost
cost 0
1 — sin t
*ik ,^_^ , dB
5.1. Матрицы и линейные системы 409
d / * -r-*\ А dB dA^ ^^
-(АВ) = А- + -В B5)
легко проверяются поэлементным применением аналогичных правил дифференцирования,
известных из элементарного курса анализа действительных (вещественнозначных)
функций. Если с — (постоянное) вещественное число и С — постоянная матрица, то
г^'-ф 1<СА» = С# - !<АС» = ^С- ™
Из-за некоммутативности матричного умножения порядок множителей в уравнениях B5)
и B6) изменить нельзя.
Линейные системы первого порядка
Система обозначений и терминология, принятая в теории матриц и векторной алгебре, могут
оказаться сложными только при первом знакомстве, но их легко освоить на практике. Мы
в основном будем использовать матричные обозначения для упрощения вычислений,
необходимых для решения систем дифференциальных уравнений, особенно тех вычислений,
которые были бы обременительны в скалярной нотации.
Мы обсудим здесь общую систему п линейных уравнений первого порядка
х[ = Pll{t)X! + Pl2(t)x2 + • • • + Pln(t)xn + /i(t),
x'2 = Р21^)хг + P22(t)x2 + • ■ • + P2n(t)xn + /2(t),
> Х'г = P3l(t)X! + P32(t)x2 + • • • + P3n(t)xn + /3(t), B7)
xn = Pnl(*)ai + Pn2(t)x2 + • •• + Рпп(фп + fn(t).
Если мы введем матрицу коэффициентов
р(*) = [р«(*)]
и векторы-столбцы
x=[xi] и f(t) =[£(*)],
то система B7) примет вид единственного матричного уравнения
>► ^ = P(t)x + f(t). B8)
Мы увидим, что общая теория линейной систем вида B7) аналогична теории одного
уравнения п-го порядка. Матричные обозначения, используемые в уравнении B8), не только
подчеркивают эту аналогию, но и позволяют значительно сократить запись.
Решение уравнения B8) на открытом интервале /является вектор-функцией (столбцом)
х(£) = [ Xi (t) ], такой что составляющие функции х удовлетворяют системе B7)
тождественно на /. Если обе функции рц (t) и fi(t) непрерывны на /, то теорема 1 из раздела 4.1
гарантирует существование на / единственного решения х(£), удовлетворяющего заданным
начальным условиям х(а) = Ь.
410 Глава 5. Линейные системы дифференциальных уравнений
Пример 6
Система первого порядка
х2 — 6xi — 7x2
может быть записана в виде единственного матричного уравнения
: = Рх.
dx
Чтобы проверить, что обе вектор-функции
*l(*) =
3e2t
2e2t
и x2(t) =
е'
3et
являются решениями матричного дифференциального уравнения с
матрицей коэффициентов Р, достаточно вычислить
РХ!
-3"
_6 -7
'Зе2'"
2e2t
=
'бе2']
4e2tJ
= х,
Рх2 =
4 -3
6 -7
е-5'
Зе'
-5е'
-15е~5<
= х2.
Чтобы исследовать общий характер (природу) решений уравнения B8), мы сначала
рассматриваем соответствующее однородное уравнение
dx _. .
А = Р(<)Х'
B9)
которое имеет вид уравнения B8), но только если в нем положить f (t) = 0. Мы ожидаем, что
оно имеет п решений хь Х2, ..., хп, которые независимы в некотором соответствующем
смысле, притом таких, что каждое решение уравнения B9) является линейной комбинацией
этих п частных решений. Данные п решений хь Х2,..., хп уравнения B9), позволяют нам
ввести обозначение
xij(t)
*,'(*) =
Xij (t)
L xnj (t)
C0)
Таким образом, Xij(t) обозначает г-й компонент вектора Xj(£), так что второй индекс
относится к вектортфункции Xj(£), а первый индекс обозначает компонент этой функции.
Теорема 1 походит на теорему 1 из раздела 3.2.
5.1. Матрицы и линейные системы 411
Теорема 1
Принцип суперпозиций
Пусть хь Х2,..., хп — это п решений однородного линейного уравнения B9) на открытом
интервале /. Если с\, с2,..., сп — константы, то линейная комбинация
Х(*) = ClXi(*) + C2X2(t) + • • • + CnXn(t) C1)
также представляет собой решение уравнения B9) на /.
Доказательство. Мы знаем, что х^ — Р(£)х* для каждого г A ^ г й п), так что из
этого немедленно следует, что
х' = cixi + c2x'2 + •. • + Сп*!п =
= CiP(t)xi + с2Р(*)х2 + • • • + СпР(*)хп =
= P(t)(cixi + с2х2 4- • • • + спхп).
Иными словами, х' = Р(£)х, что и нужно было доказать. Замечательная простота этого
доказательства наглядно демонстрирует одно из преимуществ матричной системы
обозначений. А
Пример 6
Продолжение
Если xi и х2 — два решения уравнения
dx
4 -3
6 -7
приведенные в примере 6, то линейная комбинация
х(£) = cixi(£) + с2х2(£) = Ci
Зе2<
2e2t
+ с2
Зе~5<
также является решением. В скалярной форме при х = \х\ х2]тэтодает
решение
xi(t) =3cie2t4- c2et,
x2(t) = 2cie2t+3c2et,
что эквивалентно общему решению, найденному методом исключения
в примере 2 из раздела 4.2. ■
Независимость и общие решения
Линейная независимость определена тем же самым способом для векторнозначных
функций, что и для действительных (вещественных) функций (раздел 3.2). Векторнозначные
функции xi, х2,..., хп линейно зависимы на интервале /, если существуют константы с\>
С2,..-,Сп,не все равные нулю, такие что
cixi(£) + c2x2(t) H Ь спхп(£) = О
C2)
для всех t из /. В противном случае функции называются линейно независимыми.
Эквивалентная формулировка: функции линейно независимы, если никакая из них не является
412 Глава 5. Линейные системы дифференциальных уравнений
линейной комбинацией других. Например, два решения Xi и х2 из примера 6 линейно
независимы, потому что, очевидно, ни одна из этих функций не равна скаляру (числу),
умноженному на другую.
Как и в случае единственного уравнения n-го порядка, существует детерминант
Вронского, который позволяет установить, действительно ли линейно зависимы п данных решений
однородного уравнения B9). Если xi,X2,... ,хп—это такие решения, тогда их детерминант
Вронского — детерминант матрицы размера п х п
W(t)
xn(t)
X2l(t)
Xnl(t)
Xl2(t) '
X22(t) '
Xn2(t) '
' Xin(t)
' X2n(t)
%nn\t)
C3)
если использовать систему обозначений C0) для компонентов решений. Мы можем
обозначать этот детерминант W (t) или W (xi, Х2,..., хп). Обратите внимание, что W —
детерминант матрицы, векторами-столбцами которой являются решения xi, X2,..., хп. Теорема 2
походит на теорему 3 из раздела 3.2. Кроме того, ее доказательство, по сути то же самое,
только определение W (xi, X2,..., хп) равенством C3) заменяет определение детерминанта
Вронского п решений единственного уравнения n-го порядка (см. задачи 42-44).
Теорема 2
Вронскианы решений
Предположим, что xi, X2,..., хп — это п решений однородного линейного уравнения х' =
= Р(£)х на открытом интервале /. Предположим также, что Р(£) непрерывна на открытом
интервале I. Пусть
W = W(xi,x2,...,Xn).
Тогда:
• если xi, X2, ..., хп линейно зависимы на открытом интервале /, то W = 0 в каждой
точке открытого интервала /;
• ' если xi, X2,..., хп линейно независимы на открытом интервале /, то W ф 0 в каждой
точке открытого интервала /.
Таким образом, для решений однородных систем есть только две возможности: либо W = 0
в каждой точке интервала /, либо W = 0 ни в одной точке интервала /. А
Пример 7
Легко проверить (как в примере 6), что
xi (t)
2е*
2е*
x2(i)
2e3t
0
^3t
являются решениями уравнения
dx
~dt
и хз(*)
2е5'
-2еы
3
-1
0
-2
3
-1
0
-2
3
X.
C4)
5.1. Матрицы и линейные системы 413
Вронскиан этих решений
W =
2е* 2e3t 2еы
2е* 0 -2еы
ast
аы
= е
9t
2 2
2 О
1 -1
= -16е
9t
всегда отличен от нуля. Следовательно, из теоремы 2 следует, что решения
xi, Х2 и х3 линейно независимы (на любом открытом интервале). ■
Теорема 3 походит на теорему 4 из раздела 3.2. Она говорит, что общее решение
однородной системы с матрицей размера nxnx' = P(t)x является линейной комбинацией
> х = cixi + с2х2 Н h cnxn C5)
любых п данных линейно независимых решений хь х2,..., хп.
Общие решения однородных систем
Теорема 3
Пусть хь х2, ..., хп — это п линейно независимых решения однородного линейного
уравнениях' = P(t)x на открытом интервале/, на котором непрерывна функция Р(£). Если
x(t) — любое решение уравнения х' = Р (£)х на открытом интервале J, то существуют числа
ci,c2,...,cn, такие что
х(£) = cixi(t) + c2x2(t) H h cnxn(t) C5)
для всех t из интервала /.
Доказательство. Пусть а — фиксированная точка интервала /. Сначала мы покажем,
что существуют числа с\, с2,..., сп, такие что решение
y(t) = cixi(t) 4- c2x2(t) H + CnXn(t) C6)
имеет те же самые начальные значения при t = а, что и данное решение х(£); т. е. такие что
cixi(a) + 02*2@) Н h cnxn(a) = x(a). C7)
Пусть Х(£) — матрица размера п х п с векторами-столбцами xi, х2, ..., хп и пусть с —
вектор-столбец с компонентами с±9 с2,..., сп. Тогда уравнение C7) может быть записано
в форме
Х(о)с = х(о). C8)
Детерминант Вронского W(a) = |X(a)| отличен от нуля, потому что решения xi, х2,...,
хп линейно независимы. Следовательно, матрица Х(а) имеет обратную матрицу Х(а)-1.
Поэтому вектор с = Х(а)-1х(а) удовлетворяет уравнению C8), что и было нужно.
Наконец, обратите внимание на то, что данное решение х(£) и решение у(£)
уравнения C6) — со значениями q, определенными равенством с = X(a)_1x(a), — имеют те же
самые начальные значения (при t = а). Тогда из теоремы существования и единственности
раздела4.1 следует, что х(£) = y(t) для всех t на интервале/.Это доказывает справедливость
равенства C5). А
414 Глава 5. Линейные системы дифференциальных уравнений
Замечание. Каждая система х' = P(t)x с непрерывной матрицей коэффициентов
размера п х п действительно имеет п линейно независимых решений xi, х2,..., хп, что
предполагается в условии теоремы 3. Достаточно, например, в качестве x^(t) выбрать то
единственное решение, которое удовлетворяет условию
х,-(а)
строкаj
— т. е. вектор-столбец со всеми нулевыми элементами, за исключением 1 на j-м месте.
(Другими словами, х^ (a) — это просто j-й столбец единичной матрицы.) Тогда
W(xbx2,...,xn)|i=a = |I|^0,
так что решения xi, х2,..., хп линейно независимы по теореме 2. Как фактически найти
эти решения в явном виде — другой вопрос, к нему мы обратимся в разделе 5.2 (в случае
постоянных матриц коэффициентов). ■
Задачи Коши (задачи с начальными условиями) и элементарные
операции над строками
Общее решение уравнения C5) однородной линейной системы х' = Р(£)х может быть
записано в форме
х(£) = X(t)c,
C9)
где
X(t)=[xi(t) x2(t)
<n(*) ]
D0)
— матрица размера п х п, векторы-столбцы которой представляют собой линейно
независимые решения хь х2,..., хп, причем с = [ с\ с2 • • сп ] — вектор коэффициентов
в линейной комбинации
х(£) = cixi(t) + e2x2(t) -\ h cnxn(t).
C5)
Предположим теперь, что мы желаем решить задачу Коши (задачу с начальными
условиями)
dx _,
— = Рх
dt '
x(a) = b
D1)
5.1, Матрицы и линейные системы 415
с заданным начальным вектором b = [ fei 62
достаточно решить систему
Х(а)с = Ь,
Ьп ] . Тогда, согласно равенству C9),
D2)
чтобы найти коэффициенты с\9 С2, ..., Сп в равенстве C5).
Поэтому мы кратко рассмотрим метод элементарных преобразований строк,
позволяющий решить систему линейных алгебраических уравнений с матрицей размера п х п
«11^1 + «12^2 + * ' * + CbinXn — 61,
U21#l + «22^2 Ч- ' ' ' + CL2n%n = &2>
OniXi + an2#2 H + annxn = 6n.
D3)
При этом предполагается, что матрица коэффициентов А = [а^] несингулярна (неособая),
постоянный вектор b = [ЬЦ заранее задан, а неизвестными считаются х±, Х2,..., хп.
Основная идея состоит в том, чтобы преобразовать систему D3) в более простую систему,
имеющую верхнюю треугольную форму
GllXl + ai2#2 +
^22#2 +
+ ainXn = bi,
+ Й2п#п = &2>
D4)
в которой явно в j-e уравнение входят только неизвестные Xj9 Xj+i,..., хп (J = 1, 2,...,
п). Преобразованная система тогда легко решается процессом обратной замены
(подстановки). Сначала последнее уравнение D4) решается относительно хП9 затем предпоследнее
решается относительно хп-\ и т. д., пока наконец не будет решено первое уравнение
относительно Х\.
Преобразование системы D3) к верхней треугольной форме легче всего описать в
терминах элементарных операций над строками расширенной матрицы коэффициентов
[Ajb] =
ац ai2
в21 tt22
«nl 0>n2
a>in
a<2n
Q"nn
bi1
h
bnj
D5)
которая получается приписыванием вектора Ь к матрице А в качестве дополнительного
столбца. Допустимы элементарные операции над строками следующих трех типов.
1. Умножить любую (отдельную) строку матрицы на константу, отличную от нуля.
2. Поменять местами любые две строки матрицы.
3. Вычесть одну строку, умноженную на (постоянное) число, из любой другой строки.
Цель состоит в том, чтобы использовать последовательность таких операций (одну за
фугой, по очереди), чтобы преобразовать [ А • b ] в верхнюю треугольную матрицу, т. е.
416 Глава 5. Линейные системы дифференциальных уравнений
в такую матрицу, которая имеет только нули ниже своей главной диагонали. Тогда эта
верхняя треугольная расширенная матрица коэффициентов соответствует верхней треугольной
системе D4). Процесс преобразования [ А | b ] выполняется над одним столбцом на одном
шаге, слева направо, как показано в следующем примере.
Пример 8
Используем векторы решения, данные в примере 7, чтобы решить задачу
Коши (задачу с начальными условиями)
cfcx
It
3
1
0
-2
3
-1
0
-2
3
х@) =
D6)
Решение Из теоремы 3 следует, что линейная комбинация
х(£) = cixi(t) + с2х2(£) + с3х3(*) =
Г2е*"
2е*
е*
+ с2
Г 2е3< 1
0
-е3'_
+ с3
2е5' ]
-2е5'
е5'
= С1
является общим решением линейной системы D6) с матрицей размера
3 х 3. В скалярной форме это дает общее решение
xi(t) = 2сге* + 2c2e3t + 2с3е5*,
x2(t) =2сгег - 2с3е5*,
я?з(*) = схе* - с2е3* + с3е54.
Мы ищем частное решение, удовлетворяющее начальным условиям
xi@) = 0, s2@) = 2, х3@) = 6.
Подставив эти значения в три предыдущих скалярных уравнения,
получим систему линейных алгебраических уравнений
2ci + 2с2 + 2с3 = О,
2ci - 2с3 = 2,
с\ - с2 + с3 = 6
с расширенной матрицей коэффициентов
2
2
1
2
0
-1
2
-2
1
0
2
6
Умножение каждой из первых двух строк на \ дает
1
1
1
1
0
-1
1
-1
1
0
1
6
5.1. Матрицы и линейные системы 417
а затем вычитание первой строки из второй строки и из третьей строки
дает матрицу
1
0
0
1
-1
-2
1
-2
0
0
1
6
Первый столбец этой матрицы теперь имеет желаемую форму.
Теперь мы умножаем вторую строку на —1, а затем дважды
прибавляем результат к третьей строке. Таким образом мы получаем верхнюю
треугольную расширенную матрицу коэффициентов
1
0
0
1
1
0
1
2
4
О1
-1 1
4J
которая соответствует преобразованной системе
ci + с2 4- е3 = О,
с2 + 2с3 = -1,
4с3 = 4.
Наконец, мы решаем эту систему: мы по очереди находим сз = 1, с2 =
= — 3 и с\ = 2. Таким образом, искомое частное решение выражается
формулами
x(t)=2xi(t)-3x2(t)+X3(t)
Решения неоднородных систем
Наконец, мы обращаем наше внимание на неоднородную линейную систему вида
4е*
4е*
2е*
-бе3'
+ Зе3'
+
—
+
2еы
2еы
еы
^=P(t)x + f(t).
D7)
Следующая теорема походит на теорему 5 из раздела 3.2 и доказывается точно тем же самым
способом. В этом разделе она играет ту же роль, которую аналогичные теоремы играли
в разделе 3.2. Короче говоря, теорема 4 означает, что общее решение уравнения D7) имеет
вид
х(£) = Хс(£) H-Xp(t),
D8)
гдехр(£)— какое-нибудь одно частное решение уравнения D7), а дополнительная функция
*с(£) — общее решение соответствующего однородного уравнения х7 = Р(£)х.
Теорема 4
.Ре
Решения неоднородных систем
Пусть хр — частное решение неоднородного линейного уравнения D7) на открытом
интервале /, на котором непрерывны функции Р(£) и f (t). Пусть хх, Х2,..., хп, — линейно
418 Глава 5. Линейные системы дифференциальных уравнений
независимые решения соответствующего однородного уравнения на открытом интервале I.
Если х(£) — любое решение уравнения D7) на /, то существуют числа с\, сг,..., Сп, такие
что
> х(£) = cixi(t) + c2x2(£) Н Ь спхп(£) 4- хр(£)
для всех t из/.
D9)
А
Таким образом, нахождение общего решения неоднородной линейной системы содержит
два отдельных шага.
1. Нахождение общего решения хс (t) соответствующей однородной системы.
2. Нахождение какого-нибудь одного частного решения хр (t) неоднородной системы.
Тогда сумма х(£) = хс(£) + хр(£) будет общим решением неоднородной системы.
Пример 9
Неоднородная линейная система
х[ = 3xi - 2х2 - 9t + 13 ,
х'2 = -xi + Зх2 ~ 2х3 + 7t - 15,
Х_о —
- х2 + Зхз - 6* 4- 7
имеет вид D7) при
р(*) =
3
-1
о
-2 О
3 -2
-1 3
f(t) =
-9t + 13
7<-15
-6t+ 7
В примере 7 мы видели, что общее решение соответствующей однородной
линейной системы
dx
3 -2
-1 3
О -1
О
-2
3
выражается формулой
Хс(*) =
и мы можем подстановкой проверить, что функция
'2cie* 4- 2c2e3t + 2e3e5t"
2c1et - 2c3e5t
c\el - C2est 4- c2e5t
3*
5
2t
(найденная с использованием системы компьютерной алгебры)
является частным решением первоначальной неоднородной системы.
Следовательно, согласно теореме 4, общее решение неоднородной системы
выражается формулой
x(t) = xc(*)+xp(t);
5:1. Матрицы и линейные системы 419
т. е. формулами
a?i(t) = 2cie* + 2c2e3t + 2c3e5t + 3t,
Я?2(*)
*з(*)
2cie*
cie*
-2c3e5t + 5,
c2e3t + c3e5t + 2t.
5.1, Задачи
A =
и В =
3 -4
5 1
1. Пусть
'2 -3*
4 7_
Найдите (aJA + 3B; (b) ЗА - 2B; (с) АВ; (d) BA.
2. Проверьте, что (a) A(BC) = (AB)C и что (b) A(B + C)- AB + AC, где матрицы А и В
те же, что и в задаче 1, а
~0 2"
3 -1
С =
3. Найдите АВ и ВА, если
А =
О -1
-4 5
и В =
1
7
3
3
0
-2
4. Пусть матрицы А и В те же, что и в задаче 3 и
2t
и у =
sint
cost
А =
и В =
0
1—1
2
-3
4
5
2
-3
-1
Найдите Ау и Вх. Определены ли произведения Ах и By? Объясните ваш ответ.
5. Пусть
2-1"
0 4 3
-5 2 7
Найдите (аOА + 4В; (Ь) ЗА - 5В; (с) АВ; (d) BA; (e) A - Я.
6. Пусть
Ai =
(а) Покажите, что AiB = A2B, и заметьте, что Ai ф Аг. Таким образом, закон сокращения
для матриц не выполняется; т. е. из AiB = А2В и В ф О не следует, что Ai = A2. (b) Пусть
А = Ai — А2. Покажите, что АВ = О. Таким образом, произведением двух матриц, отличных
от нуля, может быть нулевая матрица.
7. Вычислите детерминанты^ матриц А и В из задачи 6. Действительно ли ваши результаты
подтверждают теорему о том, что
2 11
_-3 '2 J
В =
, А2 =
[2 4"
1 2
1-й 1-й
1
3"
-2
det(AB) = det(A) • det(B)
для любых двух квадратных матриц А и В того же самого порядка?
420 Глава 5. Линейные системы дифференциальных уравнений
8. Предположим, что А и В — матрицы из задачи 5. Проверьте, что det(AB) = det(BA).
В задачах 9 и 10 проверьте правило дифференцирования произведения (АВ)' = А'В + АВ'.
9. A(t) =
10. A(t) =
t
е
-t
St
2t - 11
i—i
t -
и
t t2]
0 2
-1 t3J
иВ(<)
и B(t) =
1-t \+t
ЗГ
4*3
2е~г
3t
В задачах 11-20 запишите данную систему в форме х' = Р(£)х + f (t).
= -Зу, у' = Зх 12. ж' = Зх - 2у, у' = 2х + у
= 2х + 4у + Зе* ,у' = Ьх - у - t2 14. х' — tx — егу 4- cos t, у' = e~lx + £2t/ - sin t
= y + z,y' = z + x,z' = x + y 16. xf = 2x — Зу,у' = x + у + 2z, z' = by — 7z
= 3x-4y + z + t9y' = x-3z + t2,z' = 6y-7z + t3
= tx-y + e*z, y' = 2x 4- t2y - г, г' = e~lx + 3ty + t3z
11. ж
13. ж
15. x'
17. ж'
18. x'
19. ж'х = ж2, x'2 = 2жз, ж3 = Зж4, ж4 = 4xi
20. x'i = Ж2 + Хз + 1, х'2 = Жз Ч- #4 + *»
Ж3 = Ж1 + Ж4 4" t2, Х4 = Xi + Х2 4" ^3
5 задачах 21-30 сначала проверьте, что данные векторы являются решениями данной
системы. Затем используйте детерминант Вронского, чтобы показать, что они линейно независимы.
Наконец, напишите общее решение системы.
«2t
21. х' =
22. х' =
23. х' =
24. х' =
25. х' =
26. х' =
х2 =
28. х' =
х2 =
4 2
-3 -1
-3
-3
3 -1
5 -3
х; xi =
x;xi
2е*
-Зе*
х; xi = e
х; xi = e
Зе3
1
1
з*
, х2 =
,Х2
, х2 = е
02t
2е~
, х2
1
-2
4 -3
6 -7 1
х; xi =
Зе2
2е2
, х2 =
е оь
3e~5t
Г 3 -2 0'
-1 3-2
[ 0 -1 3
e3t
' -2"
0
1
х; xi = е*
,х3 = е5'
Г 2]
-2
1
]
2
1J
х' =
1
1
х2 = е~*
1
0
1
1"
0
-1
1"
1
0_
х; xi = е2ь
, хз = е~ь
0]
1
-1J
i—i
1
[lj
1 2 Г
6-10
1 -2 -1
Г 2"
3
[-2
х; xi = 1
, хз = e~4t
"-1
2
1
i—i
6
—13 j
5.1. Матрицы и линейные системы 421
29. х' =
Х2 = е —
-8 -
11
6 9
[-6 -6
g*
1"
-1
1
,х3
-2"
2
1
х; xi = e 2t
= е3*
1"
-1
0
3]
-2
2j
30. х'
1—1
0
6
0
-4
1
-12
-4
0
0
-1
0
-2'
0
-6
-1
х; xi = e
Х2 = е
, хз = е
О
1
О
-2
, Х4 = е
5 задачах 31-40 найдите то частное решение данной линейной системы, которое удовлетворяет
заданным начальным условиям.
31. Система из задачи 22: хг@) = 0, ^2@) = 5
32. Система из задачи 23: хг@) — 5, Ж2@) = — 3
33. Система из задачи 24: хг@) = 11, Ж2@) = — 7
34. Система из задачи 25: xi@) = 8, ^2@) = О
35. Система из задачи 26: хг@) = 0, Ж2@) = 0, жз@) = 4
36. Система из задачи 27: zi@) = 10, ж2@) = 12, х3@) = -1
37. Система из задачи 29: zi@) = 1, х2@) = 2, ж3@) = 3
38. Система из задачи 29: zi@) = 5, ж2@) = -7, ж3@) = 11
39. Система из задачи 30: х\@) = #2@) = #з@) = #4@) = 1
40. Система из задачи 30: хг@) = 1, ж2@) = 3, ж3@) = 4, ж4@) = 7
41. (а) Покажите, что вектор-функции
... . +2 '
Xi(t) =
И Х2 =
линейно независимы на вещественной оси. (Ь) Почему из теоремы 2 следует, что не существует
непрерывной матрицы Р(£), такой что xi и Х2 являются решениями системы х' = Р(£)х?
42. Предположим, что одна из вектор-функций
xi (*) =
Xn(t)
X2l(t)
И X2(t) =
Xl2(t)
X22(t)
равна произведению постоянной (т. е. числа) на другую функцию на открытом интервале /.
Покажите, что их детерминант Вронского W(t) = |[^ij(t)]| должен обратиться в нуль
тождественно на /. Это доказывает часть (а) теоремы 2 в случае п = 2.
43. Предположим, что векторы xi(t) и хг(£) из задачи 42 являются решениями уравнения х' =
= Р(£)х, причем матрица размера 2x2 P(t) непрерывна на открытом интервале /. Покажите,
что если существует точка а интервала /, в которой детерминант Вронского W(a) равен нулю,
то существуют числа с\ и С2, не оба равные нулю, такие что cixi(a) -f 02X2@) = О. Затем из
единственности решения уравнения х' = P(t)x выведите, что
cixi(t) + c2x2(t) = 0
для всех t из /; т. е. что xi и Х2 линейно зависимы. Это доказывает часть (Ь) теоремы 2 в случае
п = 2.
422 Глава 5. Линейные системы дифференциальных уравнений
44. Обобщите задачи 42 и 43, чтобы доказать теорему 2 для произвольного положительного целого
числа п.
45. Пусть xi(£), Х2(£), ..., хп(£) — вектор-функции, г-е компоненты которых (для некоторого
фиксированного г) xa(t), Xi2(t), ..., Xin(t) представляют собой линейно независимые
вещественные функции. Заключите, что и сами вектор-функции линейно независимы.
5.1. Приложение. Автоматическое решение
линейных систем
Линейные системы с более чем двумя или тремя уравнениями чаще всего решаются с
помощью калькуляторов или компьютеров. Вспомните, например, что в примере 8 нам пришлось
решить линейную систему
2ci + 2с2 + 2с3 = О,
2ci - 2с3 = 2, A)
С\ — С2 + Сз = б,
которая может быть записана в форме АС = В с матрицей коэффициентов размера 3 х 3 А
в правой части и вектором-столбцом размера Зх1В=[0 2 6] и вектором-столбцом
неизвестных С = [ с\ сг сз ] . На рис. 5.1.1 показано решение системы С = А~*В
на калькуляторе TI, так что в итоге получилось с\ = 2, сг = — 3 и сз = 1. Тот же самый
результат можно найти с помощью команд системы Maple:
with(linalg):
А := array([[2, 2, 2], [2, О, -2], [1, -1, 1]]):
В := array([[0], [2], [6] ]):
С := multiply(inverse(A),В);
[112,272] £2
Lilian
,0,
[[2
[2
[1
[[0] [2П6П+В
-21 [ 1Г -11
2
8
-1
2 1
-2]
1 ]]
fl-l*B+C
[[81
[21
[6П
[[2 1
[-31
[1 П
Рис. 5.1.1. Решение
системы A) вида АС = В на
калькуляторе TI-86
5.2v Метод собственных значений для однородных систем 423
команд системы Mathematica:
А = {{2, 2, 2), {2, О, -2), {1, -1, 1}};
В =.{{0}, {2},, {6}};,
С = Inverse[А].В
или команд системы Matlab:
А= [[2 :£. 2|йп[2 у,0 ч.-21П[1 -1 1].};
В = [0; 2; б] ;
С = inv(A)*В
Используйте ваш собственный калькулятор или доступную вам систему компьютерной
алгебры, чтобы "автоматически" решить задачи 31-40 из этого раздела.
5.2. Метод собственных значений для однородных
систем
Вы уже знаете, как с помощью метода исключений найти общее решение однородной
линейной системы первого порядка с постоянными коэффициентами
х[ = ацхг + di2X2 +
#2 — а21#1 + а22#2 +
х'п — cinixi + ап2х2 + • • • + аппхп.
Мы теперь познакомим вас с другим мощным методом, который применяется для этой же
цели. Согласно теореме 3 из раздела 5.1, для этого достаточно найти п линейно независимых
векторов решения xi, х2,..., хп; тогда линейная комбинация
► х(£) = cixi + с2х2 Ч Ь спхп B)
с произвольными коэффициентами как раз и представляет собой общее решение системы A).
Чтобы найти п нужных линейно независимых векторов решения, мы проведем аналогию
с методом корней характеристического уравнения, позволяющим найти решение одного
однородного уравнения с постоянными коэффициентами (раздел 3.3). Разумно ожидать, что
векторы решения имеют вид
\ х1"
х2
хз
- *^п _
=
" viext"
v2eXt
v3ext
т vnext ^
=
где Л, vi, v2, уз, • •., vn — подходящие скалярные константы. Ведь если подставить
Ч~ Cbin-Em
' Ч~ &2пхт
О)
ext = veAt,
C)
Xi — V%€> , Х^ — AViC
424 Глава 5. Линейные системы дифференциальных уравнений
(г = 1, 2, ..., п) в A), то множитель ext сократится повсюду. Это приведет нас к п
линейным уравнениям, которые (для подходящих значений А) мы можем надеяться решить
и, таким образом, найти такие значения коэффициентов v\, г>2,..., vn в уравнении C), чтобы
х(£) = veAt. Тогда эта функция действительно будет решением системы A).
Чтобы исследовать эту возможность, лучше записать систему A) в матричной форме
> х' = Ах, D)
где А = [ ац; ]. После подстановки пробного решения х = veAt (его производная равна
х! = Xvext) в уравнение D) получим
AveAt=AveAt.
Сокращая отличный от нуля скалярный множитель eXt, получаем
> Av = Av. E)
Это означает, что х = veAt будет нетривиальным решением уравнения D) при условии, что
вектор v отличен от нуля и А является константой, такой что выполняется равенство E).
Иными словами, в этом случае матричное произведение Av представляет собой
умноженный на скаляр (число) вектор v. Теперь возникает вопрос: как найти v и А?
Чтобы ответить на этот вопрос, мы перепишем уравнение E) в форме
> (A-AI)v = 0. F)
При заданном А это система п однородных линейных уравнений с неизвестными v\, г>2,
..., vn. По известной теореме линейной алгебры она имеет нетривиальное решение тогда
и только тогда, когда детерминант ее матрицы коэффициентов обращается в нуль; т. е. тогда
и только тогда, когда
|А - AI| = det(A - AI) = 0. G)
В его самой простой формулировке метод собственных значений, позволяющий найти
решение системы х! = Ах, состоит в том, чтобы сначала найти А так, чтобы выполнялось
равенство G), а затем при этом значении А найти решение уравнения F) и тем самым
получить vi,V2,...,vn. Тогда х = veAt будет представлять собой вектор решения. Название
(имя) метода объясняет следующее определение.
Определение. Собственные значения и собственные
векторы
Число А (нуль или отличное от нуля) называют собственным значением матрицы
размера п х п А, если
| А - А1| = 0.
Собственный вектор, соответствующий собственному значению А —
нуля вектор v, такой что Av = Av, так что
(А - AI)v = 0.
1 I,, "i
G)
это отличный от
F)
5.2. Метод собственных значений для однородных систем 425
Обратите внимание, что если собственный вектор v соответствует собственному
значению А, то и произведение любого постоянного скаляра, отличного от нуля, на v, т. е. cv,
также представляет собой собственный вектор, соответствующий тому же собственному
значению. Это следует из того, что каждую часть в уравнении F) можно умножить на с ф 0.
Прилагательное собственный обязано немецкому слову eigen, которое переводится в
данном контексте приблизительно как собственный; часто употребляются также термины
характеристическое значение и характеристический вектор4. По этой причине уравнение
|А-А1| =
an - A ai2
&21 a22 ~~ А
а>2п
0>п1
0"п2
= 0
(8)
называется характеристическим уравнением матрицы А; его корни — собственные
значения А. После раскрытия детерминанта в равенстве (8) мы, очевидно, получим многочлен
степени п вида
(-l)nAn + bn-iA71 + • • • + bi A + bo = 0.
(9)
По основной теореме алгебры это уравнение имеет п корней. (Возможно, некоторые из них
не вещественные, а комплексные; возможно, некоторые них являются кратными.) Таким
образом, матрица размера пхп имеет п собственных значений (учитывая кратность корней).
Хотя мы предполагаем, что элементы матрицы А — вещественные числа, мы допускаем
возможность наличия комплексных собственных значений и комплексных собственных
векторов.
Наше обсуждение уравнений D)-G) позволяет дать доказательство следующей теоремы,
которая лежит в оснЬве метода собственных значений, применяя который, можно (иногда без
труда!) найти решение линейной системы первого порядка с постоянными коэффициентами.
Теорема 1
Собственные значения и решения уравнения х = Ах
Пусть Л будет собственным значением [постоянной] матрицы коэффициентов А линейной
системы первого порядка
= Ах.
Если собственный вектор v соответствует А, то
► х(«) =
является нетривиальным решением системы
ve
At
4 На английском собственное число — eigenvalue, а собственный вектор — eigenvector. Объясняя происхожде-
яие английских терминов, представляющих собой одно слово, авторы говорят о приставке eigen. Терминам
характеристическое значение и характеристический вектор в английском языке соответствуют characteristic
value и characteristic vector. — Примеч. ред.
426 Глава 5. Линейные системы дифференциальных уравнений
Метод собственных значений
Схематически этот метод, позволяющий найти решение однородной системы с матрицей
размера пхпс постоянными коэффициентами х' = Ах, можно представить следующим
образом.
1. Сначала мы решаем характеристическое уравнение (8) и находим собственные
значения Ai, А2,..., Ап матрицы А.
2. Затем мы пытаемся найти плинейно независимых,собственных векторов vi, V2,...,
vn, соответствующих этим собственным значениям.
3. Выполнить шаг 2 не всегда возможно, но когда это возможно, мы получаем п линейно
независимых решений
xi(*)=vieAlt, x2(t)=v2e
A2t
Xn(*)
: vne
An£
A0)
В этом случае общее решение ёистемы х' = Ах представляет собой линейную
комбинацию
х(£) = cixi(£) + с2х2(£) Н Ь CnXn(t)
этих п решений.
Мы обсудим отдельно различные случаи, которые могут представиться в зависимости от
того, являются ли собственные значения простыми или кратными, вещественными или
комплексными. Случай кратных собственных значений—кратных корней характеристического
уравнения — отложим до раздела 5.4.
Простые вещественные собственные значения
Если собственные значения Ai, А2,..., Ап вещественны и различны, тогда мы подставляем
каждое из них по очереди в уравнение F) и решая его, находим соответствующие
собственные векторы vi, v2, ..., vn. В этом случае может быть доказано, что векторы частного
решения, определенные равенствами A0), всегда линейно независимы. (Соответствующее
доказательство имеется, например, в разделе 6.2 учебника Эдвардса и Пенни по
элементарной линейной алгебре, выпущенном в 1988 году (Edwards and Penney, Elementary Linear
Algebra (Englewood Cliffs, N.J.: Prentice Hall, 1988).) В любом конкретном примере линейную
независимость можно всегда проверить с помощью детерминанта Вронского, введенного
в разделе 5.1. Следующий пример иллюстрирует обсуждаемую процедуру.
Пример 1
Найдем общее решение системы
х\ — 4xi + 2x2,
Х2 = 3X1 — #2-
Решение Матричная форма системы A1) имеет вид
4 2
3 -1
(П)
A2)
5.2. Метод собственных значений для однородных систем 427
Характеристическое уравнение матрицы коэффициентов можно записать
в виде
4-А 2
3 -1-Л
= D-А)(-1-А)-6 =
= А2 - ЗА - 10 = (А + 2)(А - 5) = 0,
так что мы имеем различные (простые) вещественные собственные
значения Ai = — 2 и Аг = 5.
Для матрицы коэффициентов А в уравнении A2) уравнение
собственного вектора (А — AI)v = О принимает вид
4-А
3
2
-1-А
A3)
причем соответствующий собственный вектор v = [ а Ь] .
Случай 1: Ai = —2. Подстановка первого собственного значения
Ai = —2 в уравнение A3) дает систему
Г 6 2] Го] _ ГО]
[3 1J [ь\ ~~ [Oj
т. е. два скалярных уравнения
6а + 26 = 0,
За+ 6 = 0.
A4)
В отличие от несингулярных (неособых) (алгебраических) линейных
систем, решения которых мы обсуждали в разделе 5.1, однородная линейная
система A4) сингулярна (особая) — два скалярных уравнения, очевидно,
эквивалентны (каждое получается в результате умножения другого на
число). Поэтому система уравнений A4) имеет бесконечно много
решений, отличных от нуля,—мы можем выбрать произвольным (но отличный
of нуля) значение а и затем решить эту систему относительно Ь.
Подстановка собственного значения А в уравнение собственного
вектора (А — AI)v = О всегда дает сингулярную (особую) однородную
линейную систему, и среди ее бесконечного множества решений мы
обычно ищем "простое" решение с маленькими целочисленными значениями
(если это возможно). С учетом второго уравнения A4) выбор а = 1 дает
Ъ = —3, и, таким образом,
vi =
1
-3
—собственный вектор, который соответствует Ai = —2 (как и
произведение любого (постоянного) отличного от нуля числа на vi).
428
Глава 5. Линейные системы дифференциальных уравнений
Замечание. Если вместо "самого простого" выбора а = 1,6= —3,
мы сделали бы другой выбор а = с ф О, Ь = — Зс, мы получили бы
собственный вектор
VI
с
-Зс
1
-3
Поскольку это в действительности произведение константы на наш
предыдущий результат (собственный вектор), любой выбор приводит к
произведению [постоянного ] числа на то же самое решение
xi (t)
-it
Случай 2: А2 = 5.
в A3) дает пару
Подстановка второго собственного значения А = 5
-а + 26 = О,
За - 66 = О
A5)
эквивалентных скалярных уравнений. При Ь = 1 в первом уравнении мы
получаем а = 2, так что собственный вектор
v2
соответствует Х2 = 5. Другой выбор а = 2с, Ь — с ф 0 просто дал бы
произведение v2 на [постоянное] число.
Эти два собственных значения и соответствующие собственные
векторы приводят к двум решениям
XI (О
o-2t
И Х2(£) =
„5t
Они линейно независимы, потому что их детерминант Вронского
-2t 2e5t
е
-3e~2t
obt
= 7e'
,3t
отличен от нуля. Следовательно, общее решение системы A1) можно
записать в виде
х(£) = cixi(t) + с2х2(£) = с\
или (в скалярной форме),
1
-3
е-2* + с2
D5t.
xi(t)= ciet + 2c2e5i,
x2(t) = -3cie~2t + c2e5t.
5.2. Метод собственных значений для однородных систем 429
Рис. 5.2.1. Поле
направлений и интегральные кривые
линейной системы х[ = 4xi +
4- 2x2, #2 = Зя?1 — Х2 из
примера 1
На рис. 5.2.1 показаны некоторые типичные интегральные кривые
системы A1). Мы видим два семейства гипербол, имеющих одну и ту же
пару асимптот: прямую х\ = 2x2, получающуюся из общего решения
прис! = 0 и прямую Х2 = —3xi, получающуюся при С2 = 0. Учитывая
начальные значения х\ @) = Ь\, Х2 @) = 62, из рисунка видно, что
• если(б1,б2)лежитсправаотпрямойлиниих2 = —Зхь то оба решения
х\ (t) и X2(t) стремятся к +оо при t —> -I-00;
• если F1,62) лежит слева от прямой линии Х2 = — 3xi, то оба решения
х\ (t) и X2(t) стремятся к —оо при t —> -boo. ■
Замечание. Как и в примере 1, при обсуждении линейной системы х' = Ах удобно
использовать векторы xi, X2,..., хп для обозначения различных векторнозначных решений
системы, а скалярами х\, Х2, ..., хп удобно обозначать компоненты отдельного вектор-
нозначного решения х. ■
Анализ подсистем
Часто сложный процесс или систему можно разбить на более простые подсистемы или части,
которые могут быть проанализированы отдельно. Тогда, чтобы смоделировать всю систему,
достаточно иметь описания взаимодействия между различными частями. Таким образом,
химический завод, например, может состоять из последовательности отдельных каскадов
(или даже физических отделений), в которых объединяются или смешиваются различные
реагенты и продукты. Иногда случается, что каждую отдельную подсистему можно описать
одним дифференциальным уравнением, тогда модель всей физической системы может быть
представлена системой дифференциальных уравнений.
Как простой пример системы с тремя каскадами (этапами) рассмотрим показанные на
рис. 5.2.2 три рассольных бака, содержащие Vi, V2 и Vs галлонов рассола соответственно.
Пресная вода вливается в бак 1, в то время как перемешанный рассол выливается из бака 1
в бак 2, из бака 2 в бак 3 и вытекает из бака 3. Пусть Xi (t) обозначает количество (в фунтах)
430 Глава 5. Линейные системы дифференциальных уравнений
Рис. 5.2.2. Три
рассольных бака из примера 2
соли в баке г в момент времени t для г = 1,2 и 3. Если в каждый бак вливается и выливается г
галлонов в минуту (иными словами, расход равен г галлонов в минуту), то простой учет
концентраций соли, как в примере 2 из раздела 4.1, приводит к системе первого порядка
A6)
где
Х-\ — "'1^'lj
х2 = k\Xi ■
хз —
- к2Х2,
&2#2 — &3#3>
г = 1,2,3.
A7)
Пример 2
Решение
Пусть Vi = 20, V2 = 40, V3 = 50, г = 10 (галлонов в минуту), а начальные
количества соли в трех рассольных баках равны (в фунтах)
жх@) = 15, ж2@) = я?з@) = 0.
Найдем количество соли в каждом резервуаре в момент времени t ^ 0.
Подставляя данные числовые значения в равенства A6) и A7), мы
получаем задачу Коши (задачу с начальными условиями)
*'(*)
-0,5 0,0 0,0
0,5 -0,25 0,0
0,0 0,25 -0,2
х, х@)
15
0
0
A8)
для вектора x(t) =[ x\ (t) жг(£) £з(£)] • Простая форма матрицы
А-А1= | 0,5 -0,25-А 0,0 | A9)
-0,5 - А
0,5
0,0
0,0
-0,25 - А
0,25
0,0
0,0
-0,2 - А
5.2. Метод собственных значений для однородных систем 431
0,0 0,0 0,0"
0,5 0,25 0,0
0,0 0,25 0,3
а
Ь
с
—
1
0
oj
сразу приводит к характеристическому уравнению
|А - А1| = (-0,5 - А)(-0,25 - А)(-0,2 - А) = 0.
Таким образом, матрица коэффициентов в уравнении A8) имеет
различные собственные значения Ai = —0,5, А2 = —0,25 и A3 = —0,2.
Случай 1: Ai = —0,5. Подставляя А = —0,5 в равенство A9),
получаем уравнение
[A + @,5).I]v =
для соответствующего собственного вектора v = [ а Ь с ] .
Последние две строки, после деления на 0,25 и 0,05 соответственно, приводят
к скалярным уравнениям
2а + Ь =0,
56 + 6с = 0.
Второе уравнение удовлетворяется при Ь = —6 и с = 5, а тогда первое
уравнение дает а = 3. Таким образом, собственный вектор
vi = [3 -6 5]Т
соответствует собственному значению Ai = —0,5.
Случай 2: А2 = —0,25. Подставляя А = —0,25 в равенство A9),
получаем уравнение
-0,25
0,5
0
0
0
0,25
0
0
0,05
а
Ь
с
=
0
0
0
[A+@,25)-I]v =
для соответствующегб собственного вектора v = [ а Ь с ] . Каждая
из первых двух строк дает а = 0, а деление третьей строки на 0,05 дает
уравнение
56 + с = 0,
которое удовлетворяется при Ь = 1, с = — 5. Таким образом,
собственному значению Аг = —0,25 соответствует собственный вектор
v2=[0 1 -б]5
432 Глава 5. Линейные системы дифференциальных уравнений
Случай 3: А3 = -0,2.
ем уравнение
Подставляя А = —0,2 в равенство A9), получа-
[A + @,2)-l]v =
0,3
0,5
0,0
0,0 0,0
-0,05 0,0
0,25 0,0
а
Ь
с
—
0
0
0
для собственного вектора v. Первая и третья строки показывают, что
а = 0 и Ь = 0 соответственно, но нулевой третий столбец позволяет
в качестве с выбрать произвольное число (но отличное от нуля). Таким
образом, собственный вектор
v3=[0 0 1]Т
соответствует собственному значению Аз = —0,2.
Следовательно, общее решение
х(£) = ciVieAl* + c2v2eX2t + c3v3eA3*
имеет вид
х(£) = ci
е<-°'Б>*+с*
е(-0,25)*+Сз
9(-0,2)t
Полученные скалярные уравнения имеют вид
a?i(t)= 3cie(-°'5)*,
x2(t) = -6с1е(-°'5)* + с2е(-°'25)*,
x3(t) = 5С1е(-°'5)* - 5с2е(-°'25)* + с3е^0^ .
Когда мы налагаем начальные условия х\ @) = 15, х2@) = х3@) = 0,
мы получаем уравнения
3ci = 15,
—6ci + c2 " = 0,
5ci - 5с2 + с3 = 0,
решения которых (в свою очередь) легко находятся: с\ = 5, с2 = 30
исз = 125. Таким образом, наконец, количества соли в момент временив
в трех рассольных баках даются функциями
*i(t)= 15е<-°'5>*, •
x2(t) = -30е<-0'5)* + 30е('25)*,
x3(t) = 25е('5)* - 150е(-°'25)* + 125е<-°'2>*.
На рис. 5.2.3 показаны графики функций х\ (t), х2 (t) и х3 (t). Как и следует
ожидать, соль из бака 1 быстро "вымывается" поступающей пресной
водой, и х\ (t) —► 0 при t —► +оо. Количества х2 (t) и х3 (t) соли в баках 2
и 3 сначала возрастают, а затем приближаются к нулю, поскольку изо всей
системы с тремя баками соль вымывается при t —■» +оо. ■
5.2. Метод собственных значений для однородных систем 433
ID
10
,1111
TfV=x2(')
1 У \ N*ex3<0
У V^Nvi^
1 1
-
0 5 10 15 20 25 30
t
Рис. 5.2.3. Функции,
указывающие содержание соли в
баках из примера 2
Комплексные собственные значения
Даже если некоторые из собственных значений комплексные, но простые (не кратные),
описанный метод все равно приводит к п линейно независимым решениям.
Единственное осложнение состоит в том, что собственные векторы, соответствующие комплексным
собственным значениям, обычно являются комплексными, так что мы будем иметь ком-
плекснозначные решения.
Вот как мы собираемся получить действительные решения. Сначала мы заметим, что
все коэффициенты характеристического уравнения (8) вещественны, поскольку мы
предполагаем, что все элементы матрицы А вещественны. Следовательно, все комплексные (не
вещественные) собственные значения можно сгруппировать в пары комплексно
сопряженных корней. Предположим, что \ = p + qin\ = p — qi — такая пара собственных значений.
Если собственный вектор v соответствует Л, так что
(А - AI)v = 0,
то переход к комплексно сопряженным числам дает равенство
(А - AI)v = 0.
Таким образом, сопряженный к v собственный вектор v соответствует Л. Конечно,
сопряженный вектор определяется покомпонентно; если
v =
а\ + b\i
an + Ьпг
=
«1
«2
ап _
+
h 1
ъ2
Ьп\
г»= а + Ы,
B0)
то v = а — Ы. Комплекснозначное решение, соответствующее А и v, в таком случае равно
х(£) = vext = ve(p+9i)t = (а + hi)ept (cos qt + isinqt);
иными словами,
x(£) = ept (a cos qt - b sin qt) + iept (b cos qt + a sin qt). B1)
434 Глава 5. Линейные системы дифференциальных уравнений
Поскольку вещественная и мнимая части комплекснозначного решения также являются
решениями, мы этим способом получаем два действительных решения
Xi(t) = Re(x(£)) = ept(acos<# — bsingtf),
X2(£) = Im(x(£)) = ept{bc,osqt 4- asingtf),
B2)
соответствующих комплексно сопряженным собственным значениям р ± qi. Просто
проверить, что те же самые два действительных решения являются результатом взятия
вещественной мнимой части veAt и потому не стоит запоминать формулы B2), а предпочтительнее
в конкретном примере действовать следующим образом:
• сначала найти явно какое-нибудь одно комплексное реЩение х(£), соответствующее
комплексному собственному значению А;
• затем найти вещественную и мнимую части xi (t) и хг (t), чтобы получить два
независимых вещественных решения, соответствующих двум комплексно сопряженным
собственным значениям А и А.
Пример 3
Найдем общее решение системы
— = 4#i - Зх2,
—1 =3xi +4х2.
at
B3)
Решение Матрица коэффициентов
А =
4 -3
3 4
имеет характеристическое уравнение
|А-А1| =
4-А -3
3 4-А
= D-АJ+9 = О,
и, следовательно, имеет комплексно сопряженные собственные значения
А = 4 - Зг и А = 4 + Зг.
Подставляя А = 4 — Зг в уравнение собственного вектора (А — AI) v =
= О, получаем уравнение
[А - D - Зг) • I]v :
для соответствующего собственного значения v = [ а Ь ] . Деление
каждой строки на 3 дает два скалярных уравнения
га — 6 = 0,
а + гЬ = 0,
1 Зг -3'
[ 3 Зг
а
Ь
=
"(Я
0
5.2. Метод собственных значений для однородных систем 435
каждое из которых удовлетворяется при а = 1 и Ь = г. Таким образом,
v = [1 г ] — комплексный собственный вектор, соответствующий
комплексному собственному значению А = 4 — Зг.
Поэтому соответствующее комплекснозначное решение x(t) = veAt
уравнения х' = Ах можно записать в виде
х(*Н"
Д4-3#* .^1
^(дй'З'^вшЗ^^е4*
qos3t — гзшЗн
iqos3t+ sin3t
Вещественная и мнимая части х(£) — действительные решения
xi (г), = е'
,4t
cos3£
sin3£
. и Х2(г)=ч£4*
— sin Ы
cbs3t
Поэтому действительное общее решение системы х' = Ах выражается
формулой
х(£) = cixi(^) + с2х2(£) = e
-»*t
с\ cos Ш — С2 sin St
с\ sin 3£ + с2 cos 3£
Наконец, общее решение системы B3) ц скалярной форме имеет вид
x\(t) = e4t(ci cos3£ — е2 sin3£),
х2(£) = e4t(ci sin Ы + c2 cos 3£).
На рис. 5.2.4 показаны некоторые типичные интегральные кривые
системы B3). Каждая из них является спиралью, раскручивающейся против
часовой стрелки, причем она раскручивается от начала координат в плос-
kocthxix2. Фактически, из-за множителя еи в общем решении мы видим,
что
• двигаясь по интегральной кривой, точка (xi (t), x2(t)) приближается
к началу координат при t —► — оо, тогда как
• оба абсолютные значения х\ (t) и х2 (t) увеличиваются неограниченно
при£ —> -foo, ■
На рис. 5.2.5 показана "замкнутая" система, состоящая из трех рассольных баков с
объемами Vi, V2 и Vs. Разница между этой системой и "открытой" системой, изображенной
на рис. 5.2.2, состоит в том, что теперь вода, которая вытекает из бака 3, вливается в бак 1.
В той же самой системе обозначений, что и в примере 2, соответствующая модификация
уравнения A6) примет вид
B4)
dxx
dx2 .
ST = ,klXl '
dxs _
+ кзхз,
- к2Х2, .
fc2X2 — ^3X3,
dt
где к{ = r/Vi как в A7).
436 Глава 5. Линейные системы дифференциальных уравнений
-10-8-6-4-2 0
. х\
Рис. 5.2.4. Поле направлений
и интегральные кривые линейной
системы х[ = Ах\ — 3^2, х'2 =
= 3#i -I- 4ж2 из примера 3
Скорость потока: г
Рис. 5.2.5. Три рассольных
бака из примера 4
Пример 4
Найдем количества х\ (t), X2 (t) b x$ (t) соли в момент времени t в трех
рассольных баках, показанных на рис. 5.2.5, если V\ = 50 галлонов, V2 = 25
галлонов, Vs = 50 галлонов и г = 10 галлонов в минуту.
Решение При заданных числовых значениях уравнение B4) принимает вид
It
-0,2 0 0,2
0,2 -0,4 0
0 0,4 -0,2
х
B5)
причем, как обычно, х =[ х\ Х2 хз ] .Разлагая детерминант матрицы
A-A-I
0,2-А
0,2
0,0
0,0
-0,4 - А
0,4
0,2
0,0
-0,2 - А
B6)
по его первой строке, мы находим, что характеристическое уравнение
имеет вид
(_0,2 - А)(-0,4 - А)(-0,2 - А) + @,2)@,2)@,4) =
= -Л3 - @,8) • А2 - @,2) • А =
= -А[(А + 0,4J + @,2J]=0.
Таким образом, матрица А имеет нулевое собственное значение Ао = 0
и комплексно сопряженные собственные значения А, А = —0,4 ± @,2)г.
Случай 1: Ао = 0. Подставляя А = 0 в уравнение B6), получаем
уравнение для собственного вектора
(А - 0 • I)v
-0,2
0,2
0,0
0,0
0,4
0,4
0,2"
0,0
-0,2
а
Ь
с
=
1
0
oj
5.2. Метод собственных значений для однородных систем 437
для v = [ а Ъ с ] . Первая строка дает а = с, а вторая строка
дает а = 26, так что vo = [ 2 1 2 ] — собственный вектор,
соответствующий собственному значению Ао = 0. Соответствующее решение
хоМ = voeAot уравнения B5) представляет собой постоянное решение
Mt)
B7)
Случай 2: Л = —0,4 — @,2)г. Подставляя Л = —0,4 — @,2)г в
уравнение B6), получаем уравнение для собственного вектора
[А-(-0,4-@,2H4 v =
0,2 + @,2)г 0,0 0,2 1 Га
0,2 @,2)г 0,0 \\Ь
0,0 0,4 0,2 + @,2)iJ [с
0"
0
0
Второеуравнение@,2)а+@,2)г6 = 0 удовлетворяется при а = 1и6 = г.
Тогда первое уравнение
[0,2 + @,2)г]а+@,2)с = 0
дает с = —1 — г. Таким образом, v = [ 1 г (—1 — г) ] —
комплексный собственный вектор, соответствующий комплексному собственному
значению А = —0,4 — @,2)г.
Соответствующее комплексное решение х(£) = veAt уравнения B5)
имеет вид
х
(<)=[! i -l-<]
т (-0,4-0,2i)t _
[1 г -1 - г ]Te(-°'4)t(9osO,2t - tsin0,2t)
= e(,4)t
cos0,2£ — isin0,2£
sin0,2£ + icos0,2£
L - cos 0,2£ - sin 0,2£ - i cos 0,2£ + г sin 0,2t
Вещественная и мнимая части x(t) являются вещественными решениями
Х1(«) = е(-°»4)*
cos0,2£
sin0,2t
-cos0,2£-sin0,2£
х2(*) = е(-°'4)*
-sin 0,2*
cos0,2£
-cos0,2£ + sin0,2£
B8)
438 Глава 5. Линейные системы дифференциальных уравнений
Общее решение
х(£) = coxo(t) 4- cixi(t) 4- с2х2(£)
имеет скалярные компоненты
xi(t) = 2со 4- e("°'4)t(ci cos0,2£ - с2 sin0,2£),
^2 W = со 4- e(-°'4)t(ci sin 0,2* 4- c2 cos 0,2*), B9)
x3(t) = 2co 4- e("°'4)t[(-ci - c2) cos 0,2* 4- (-ci 4- c2) sin0,2t],
выражающие количества соли в трех баках в момент времени t.
Заметьте, что
xi(t) 4- x2(t) 4- x3(t) = 5с0. C0)
Конечно, общее количество (сумма х\ (t) 4- х2 (£) 4- х$ (£)) соли в закрытой
системе постоянно; константа со в равенстве C0) равна одной пятой от
общего количества (сумма х\ (t) 4- х2 (*) 4- хз (*)) соли. Из-за множителей
e(-o>4)t B равенствах B9)
lim x\(t) = 2cq, lim х2(*) = со и lim хз(*) = 2cq.
£—>оо t—►<» t—►<»
Таким образом, при t —> 4-оо распределение соли в системе
приближается к установившемуся распределению, при котором по 40% от
общего количества соли содержится в каждом из двух 50-галлонных баков,
а остальные 20% — в 25-галлонном баке. Так что, независимо от
начального распределения соли по трем бакам, при предельном распределении
концентрация соли однородна по всей системе. На рис. 5.2.6 показаны
графики трех функций решения при со = 10, ci = 30ис2 = —10, и в этом
случае
xi @) = 50 и х2@) = х3@) = 0. ■
50
45
40
35
30
*25
20
15
10
5
°0 5 10 15 20
t
Рис. 5.2.6. Содержание соли
в баках из примера 4
\ 1 1 1
[\* = *!@
\ ^—
V ,
-
-
-
-
-
5.2. Метод собственных значений для однородных систем 439
5.2. Задачи •
В задачах 1-16 примените метод собственных значений из этого раздела, чтобы найти общее
решение заданной системы. Если даны начальные значения, найдите такэюе удовлетворяющее
им частное решение. В каждой задаче с помощью компьютерной системы или графического
калькулятора начертите поле направлений и типичные интегральные кривые данной системы.
1. х[ = х\ + 2x2, х'2 = 2xi + х2 , 2. х'\ = 2-Ci -+- 3x2, х'2 — 2х\ + х2
3. x'i = 3xi + 4х2, х2 = 3xi + 2х2; хх@) = х2@) = 1
4. x'i = 4X1 + Х2, #2 = б-Ci — -С2 5. x'i = 6X1 — 7X2, Х2 = Xi — 2х2
6. xi = 9хх -I- 5х2, х2 = -6xi - 2х2; rri(O) . = 1, ,#2.@) = 0
7. Xi = —3xi -h 4x2, a?2 = 6xi — 5x2 8. Xi = xi — 5a?2, x2 = xi — x2
9. xi = 2xi - 5x2, x2 = 4xi - 2x2; xi@) = 2, x2@) = 3
10. x'i = -3xi - 2x2, x2 = 9xi + 3x2
11. xi = xi — 2x2, x2 = 2xi + X2; xi@) = 0, x2@) = 4
12. Xi = xi — 5x2, X2 = xi -h 3x2 13. Xi = 5xi — 9x2, x2 = 2xi — X2
14. xi = 3xi — 4x2, x2 = 4xi -I- 3x2 15. xi = 7xi — 5x2, x2 = 4xi + 3x2
16. xi = -50xi + 20x2, x2 = lOOxi - 60x2
В задачах 17-25 собственные значения матрицы коэффициентов могут быть найдены подбором
и разложением на множители. Примените метод собственных значений, чтобы найти общее
решение каждой системы.
17. xi = 4xi + Х2 -г-4хз, 18. xi = xi + 2x2 + 2хз,
Х2 = Xi -|- 7X2 4" Хз, Х2 = 2X1 + 7X2 + Хз,
г х3 = 4xi + Х2 4- 4хз #з = 2xi + хг 4- 7хз
19. xi = 4xi -I- хг -I- хз, 20. xi = 5xi + жг + Зхз,
' Х2 = Xi -г-4X2 + Хз, Х2 = Xi -г- 7X2 + Хз,
' Хз = Xi -г- Х2 + 4X3 Х3 = 3X1 + Х2 + 5хз
21. xi = 5xi - 6x3, 22. xi = 3xi + 2х2 + 2х3,
Х2 = 2xi — хг — 2хз, Х2 = —5xi — 4x2 — 2хз,
х3 = 4xi — 2x2 — 4хз х'3 = 5xi + 5x2 + Зхз
S3, xi = 3xi + хг + хз, 24. xi = 2xi + хг — хз,
х2 = —5xi — 3x2 — хз, Х2 = —4xi — 3x2 — хз,
х3 = 5xi -I- 5x2 + Зхз Хз = 4xi + 4x2 + 2хз
25. xi = 5xi + 5x2 + 2хз, х2 = —6xi — 6x2 — 5хз, х3 = 6xi + 6x2 + 5хз
26. Найдите то частное решение системы
dxi
—- = 3xi + хз,
at
dx2 . _
-тг = 9xi - хг + 2хз,
at
б^Хз
W
которое удовлетворяет начальным условиям xi@) = 0, х2@) = 0, хз@) = 17.
_ -9xi +4x2 -^ хз,
at
440 Глава 5. Линейные системы дифференциальных уравнений
Количества x\(t) и X2(t) соли в двух рассольных баках, показанных на рис. 5.2.7, удовлетворяют
дифференциальным уравнениям
dx\
— = tmi,
dx2 , ,
—j- — kxXi — K2X2,
где ki = r/Vi для i = 1, 2. В задачах 27 и 28 заданы объемы V\ и V^. Снйчала решите
уравнения относительно x\(t) и X2(t), предполагая, что г — 10 (галлонов в минуту), xi@) = 15
(фунтов) и #2@) = 0. Затем найдите максимальное количество соли, когда-либо содержащейся
в резервуаре 2. Наконец, нарисуйте графики функций x\(t) и X2(t).
Пресная вода
Скорость вливания г
Бак 1
Объем V\
Соль xi(t)
Бак 2
Объем V2
Соль X2(t)
Рис. 5.2.7. Два рассольных бака из
задач 27 и 28
27. Vi = 50 (галлонов), V2 = 25 (галлонов) 28. V\ = 25 (галлонов), Vb = 40 (галлонов)
Количества x\(t) и X2(t) соли в двух рассольных баках, показанных на рис. 5.2.8, удовлетворяют
дифференциальным уравнениям
—7Г = —kiXi + &2#2, ~ТГ — fcl^l — fe#2,
at at
где, как обычно, ki = r/Vi. В задачах 29 и 30 найдите решения данных дифференциальных
уравнений, т. е. найдите функции x\{t) и X2(t), предполагая, что г = 10 (галлонов в минуту), #i@) = 15
(фунтов) и #2@) = 0. Затем начертите графики функций x\(t) и X2(t).
Рис. 5.2.8. Два рассольных бака из
задач 29 и 30
29. V\ = 50 (галлонов), V2 = 25 (галлонов) 30. V\ = 25 (галлонов), Vb = 40 (галлонов)
В задачах 31-34 рассматривается открытая система из трех резервуаров рис. 5.2.2. Пресная
вода вливается в резервуар 1, а тщательно перемешанный рассол вытекает из резервуара 1 и
вливается в резервуар 2, тщательно перемешанный рассол из резервуара 2 вытекает в резервуар 3
5.2. Метод собственных значений для однородных систем 441
и выливается из резервуара 3, причем расход во всех резервуарах равен г галлонов в минуту.
Заданы начальные количества #i@) = хо (фунтов), #2@) = 0 и х3@) = 0 соли в трех резервуарах,
а также их объемы V\,V2 uV3 (в галлонах). Сначала найдите решения дифференциальных
уравнений, т. е. найдите количества соли в трех резервуарах в момент времени t, а затем определите
максимальное количество соли в резервуаре 3. Наконец, начертите графики функций x\(t), x2(t)
ux3(t).
31. г = 30, хо = 27, Vi = 30, V2 = 15, V3 = 10
32. г = 60, хо = 45, Vi = 20, V2 = 30, V3 = 60
33. r = 60, xo = 45, Vi = 15, V2 = 10, V3 = 30
34. r = 60, xo = 40, Vi = 20, V2 = 12, V3 = 60
5 задачах 35-37 рассматривается закрытая система с тремя резервуарами, показанная на
рис. 5.2.5, которая описывается уравнениями B4). Тщательно перемешанный рассол вытекает
из резервуара 1 в резервуар 2, рассол из резервуара 2 вытекает в резервуар 3, а из резервуара 3
рассол вливается в резервуар 1, причем расход во всех резервуарах равен г галлонов в минуту.
Заданы начальные количества соли х\@) = хо (фунтов), х2@) = 0 и х3@) = 0 в трех резервуарах,
а также объемы резервуаров V\,V2uV3 (в галлонах). Сначала найдите решения
дифференциальных уравнений, т. е. найдите количества соли в трех резервуарах в момент времени t, а затем
определите предельное количество (при t —► -f oo,) соли в каждом резервуаре. Наконец, начертите
графики функций x\(t), x2(t) и x3(t).
35. г = 120, хо = 33, Vi = 20, V2 = 6, V3 = 40
36. г = 10, хо = 18, Vi = 20, V2 = 50, V3 = 20
37. г = 60, xo = 55, Vi = 60, V2 = 20, V3 = 30
Для каждой матрицы А, данной в задачах 38-40, нули в матрице облегчают вычисление ее
характеристического многочлена. Найдите общее решение уравнения х7 = Ах.
38. А = " " Г I 39. А
1 0
2 2
0 3
0 0
2
-21
0
0
0 0"
0 0
3 0
4 4_
0 0
-5 -27
0 5
0 -
-21
0
-9
0
т2
-2
4
0
0
0
2
0
0
0
0
-1
0
9
-10
8
1
40. А =
; 41. Матрица А коэффициентов (размера 4x4) системы
х[ = 4xi + х2 + х3 + 7#4,
х'2— х\ + 4#2 + Юх3 + #4,
х'3= xi + 10#2 + 4#з + Х4,
xf4 = 7#i + х2 Л- х3 + 4#4
имеет собственные значения Ai = —3, Л2 = —6, Лз = 10 и Л4 = 15. Найдите частное решение
этой системы, которое удовлетворяет начальным условиям:
m@) = 3, ж2@) = жз@) = 1, ж4@) = 3.
В задачах 42-50 вычислите собственные значения и собственные векторы с помощью
калькулятора или компьютерной системы (как показано в приложении к разделу 5.2). Затем, используя
полученные результаты, найдите общее решение линейной системы х' = Ах с данной матрицей
коэффициентов А.
442 Глава 5. Линейные системы дифференциальных уравнений
42. А =
44. А =
46. А =
48. А =
50. А =
-40 -12 54
35 13 -46
-25 -7 34
147 23 -202
-90 -9 129
т -15 -123,
13 -42 106 , 139
2 -16 52 70
1 6 -20 -31
-1 -6 22 33
47
-10
139
-232
9
-14
-30
-12
6
-14
—
13
19
12
10
9
23
-8
32
40 -
64
0
-10
-7
-10
0
-10
5
18
167 -
360
0
-20
-30
-9
6
-20
-5
-2
-121
248 т
0
10
12
10
5
10
-13
4
18
2
-15
0
43. А =
45. А =
47. А =
49. А =
-20
12
-48
9
-12
24
-18
23
-8
34
-26
139
-22
370
152
95
11
-1
21
-7
7
-17
13
-18
6
-27
21
-14
5
-38
-16
-10
13
-7
31
-5
11
-19
17
-16
7,
-26
25
. -52
7
-139
-59
-
38
0]
9
-9
9
°1
9
-9
12
-14
8
-38
-13
-
7
1
28]
-7
76
35
23 J
5.2. Приложение. Автоматическое вычисление
собственных значений и собственных векторов
В большей части вычислительных систем предусмотрена возможность легко и просто
находить собственные значения и собственные векторы. Например, на рис. 5.2.9 показано
Г"
[0:
-.5,6,6
ГГТЗГ
.25, -.2П*Я
[[-.58
[.58
[8.88
eigUl Я
8.88
-.25
.25
-.25,8]
8.881
8.881
-.28]]
Т^
eigUc R
[[8.
[8.
[1.
88
88
88
^8^7
8.88
1.88
-5.88
2F
1.
-Г50У
88 1
-2.88] 1
1.
67 ]]
NhMES EDIT Жы\МЛ DPS С PL К |
■iMUililRU'JirttlWM
Рис. 5.2.9. Вычисление
собственных значений и
собственных векторов матрицы А на
калькуляторе TI-86
5.2. Метод собственных значений для однородных систем 443
вычисление собственных значений и собственных векторов матрицы
А =
-0,5 0,0 0,0
0,5 -0,25 0,0
0,0 0,25 -0,2
изпримера2награфическомкалькуляторе.Мывидим, что каждый собственный векторотоб-
ражается как вектор-столбец ниже соответствующего ему собственного значения. Обратите
внимание, что поскольку результаты представлены в десятичной форме, именно вы
должны предположить (и проверить матричным умножением), что точный собственный вектор,
соответствующий третьему собственному значению А = — |, есть v = [ 1 —2 | ] .
Команды пакета Maple
with(linalg)
А := matrixC,3,{-0.5,0,0,0.5,-0.25,0,0,0.25,-0.2]);
eigenvects(A);
команды пакета Mathematica
А = {{-0.5,0,0},{0.5,-0.25,0},{0,0.25,-0.2}}
Eigensystem[A]
и команды пакета М ATLAB
А = [-0.5,0,0; 0.5,-0.25,0; 0,0.25,-0.2]
[V,D] = eig(A)
(где D будет диагональной матрицей, содержащей собственные значения матрицы А, а
векторы-столбцы V как раз и будут соответствующими собственными векторами) дают подобные
результаты. Вы можете использовать эти команды, чтобы найти собственные значения и
собственные векторы, необходимые для любой из задач в этом разделе.
Для более серьезного исследования выберите положительное целое число п < 10 (п = 5,
например), и пусть q\9 q2, ..., qn обозначают первые п отличных от нуля цифр в номере
вашего студенческого билета. Теперь рассмотрите открытую систему рассольных баков,
такую как изображенная на рис. 5.2.2, за исключением того, что ваша система состоит из
п последовательных резервуаров, а не из трех. Пусть объемы этих баков равны V{ = 10^
(г = 1,2,..., п) галлонов. Если расход в каждом баке равен г = 10 галлонов в минуту, то
количества соли х\ (t), х2 (t),..., хп (t) удовлетворяют линейной системе
Хл == — A/1«Z/J_)
хг = Ki—iXi—i — К%Х% (l = 2, о, . . . , 71 j,
вде ki = r/Vi. Примените метод собственных значений и с его помощью найдите решение
этой системы при начальных условиях:
a?i@) = 10, x2@) = ж3@) = • - - = хп@) = 0.
Нарисуйте график функции, представляющей собой решение, и оцените по графику
максимальное количество соли, содержащееся когда-либо в каждом из резервуаров.
Теперь проведите еще одно исследование. Для этого предположите, что система из п
резервуаров замкнута так, как изображено на рис. 5.2.5. Иными словами^ в резервуар 1
вливается то, что выливается из резервуара п (а не пресная вода). Тогда первое уравнение должно
444 Глава 5. Линейные системы дифференциальных уравнений
быть заменено уравнением х[ = кпхп — k\Xi. Теперь покажите, что в этой замкнутой
системе при t —► +00 соль, первоначально содержащаяся только в резервуаре 1, распределяется
равномерно (т. е. с постоянной концентрацией) по всем резервуарам. Чертеж, подобный
рис. 5.2.6, должен сделать это утверждение довольно очевидным.
5.3. Системы второго порядка и механические
приложения5
В этом разделе мы применяем матричные методы разделов 5.1 и 5.2 для исследования
колебаний типичных систем, состоящих из тела определенной массы и пружины, имеющих
две или больше степени свободы. Наши примеры подобраны так, чтобы проиллюстрировать
явления, которые обычно характерны для сложных механических систем.
На рис. 5.3.1 показаны три массы, связанные связанные между собой и с двумя стенками
четырьмя показанными пружинами. Мы предполагаем, что массы скользят без трения и что
каждая пружина подчиняется закону Гука — ее растяжение (удлинение) или сжатие х и сила
реакции F связаны формулой F = — кх. Если смещения вправо х\9 Х2 и хз этих трех масс
(от их соответствующих равновесных положений) положительны, то
• первая пружина растянута на расстояние х\;
• вторая пружина растянута на расстояние х2 — х\;
• третья пружина растянута на расстояние хз — х2;
• четвертая пружина сжата на расстояние хз.
Поэтому, применяя закон Ньютона F = та к этим трем массам (как в примере 1 из
раздела 4.1), получаем уравнения их движения:
т\х'{ = —к\Х\ + к2(х2 — #i),
т2х2 = -к2{х2 - xi) + кз{хз - х2),
га3#з = -&з(#з - х2) ~ к4х3.
Вводя обозначения вектора смещений х = [ х\ х2 хз ] , матрицы масс
(о
и матрицы жесткости
К =
М =
mi 0 0
0 т2 0
0 0 тоз
"-(fci + fe)
к2
0
к2
~(*2 + *з)
*з
0
кз
-(кз + fc4)
B)
C)
5 Этот дополнительный раздел может быть опущен без ущерба для понимания остального текста. В нем
приведены технические приложения собственных значений к физике и техническим задачам.
5.3. Системы второго порядка и механические приложения 445
Рис. 5.3.1. Три тела заданных
масс, соединенные пружинами
Рис. 5.3.2. Система п масс,
соединенных пружинами
систему A) можно записать в матричной форме
> Мх" = Кх.
D)
Система обозначений в уравнениях A)-D) обобщается естественным способом для
системы п соединенных пружинами масс, показанных на рис. 5.3.2. Мы должны только
положить
М
mi О
О ш2
О О
О
О
т„
E)
К =
-(fci + к2) к2 О
к2 -(к2 + к3) к3
О fc3 -(k3 + к4)
О 0 к4
О
О
О
О
V^n—1 "г Кп) ™п
Fun -(kn + kn+i)
F)
в качестве матриц масс и жесткости в уравнении D).
Диагональная матрица М, очевидно, несингулярна (неособая); чтобы получить ее
обратную М-1, нужно только заменить каждый диагональный элемент его обратной величиной.
Следовательно, умножая обе части уравнения D) на М-1, получим однородную систему
второго порядка
Ах,
G)
вде А = М-1 К. Существует много разнообразных механических систем без трения (т. е.
трением в них можно пренебречь), для которых могут быть определены смещение, или
радиус-вектор х, несингулярная (неособая) матрица масс М, а также матрица жесткости К,
йоторые удовлетворяют уравнению D).
446 Глава 5. Линейные системы дифференциальных уравнений
Решение систем второго порядка
Чтобы найти решение уравнения G), мы подставляем (как в разделе 5.2 в случае системы
первого порядка) пробное решение вида
x(t)=veaV (8)
ще v — постоянный вектор. Тогда х" = a2veat, так что подстановка. (8) в уравнение G) дает
a2veat=Aveat,
откуда, следует, что,
Av==a2v: (9)
Поэтому х(£) = veat является решением уравнения х" = Ах тогда й только тогда, когда
а2 = А является собственным значением матрицы А, а v — соответствующим ему
собственным вектором.
Если уравнение х" = Ах служит моделью механической системы, то обычно
собственные значения матрицы А являются отрицательными вещественными числами. Если
а2 = А = -ш2 < О,
то а = ±u>i. В этом случае решение, данное уравнением (8), представляет собой функцию
' - : x(t) ^ Чге*"* = v(cos u)t + г sin u>t).
Тогда вещественная и мнимая части
xi(t) = vcosu;£ и х2(£) = vsincttf A0)
функции x.(t) представляют собой линейно независимые действительные решения
системы. Этот анализ приводит к следующей теореме.
Теорема 1
Линейные однородные системы второго порядка
Если матрица А размера п х п имеет различные (простые) отрицательные собственные
значения — uj\, — ш\, ..., — и;2, соответствующие [вещественным] собственным векторам
vi, V2,..., vn, то общее решение
> х" = Ах
дается формулой
п
>■ х(£) = У^(«г COSLJit + bi Sm(dit)Vi A1)
• г=1 '■ '
с произвольными постоянными аг- и 6г. В частном случае простого нулевого собственного
значения Ао, соответствующего србственному вектору v0, соответствующая часть общего
решения имеет вид
x0(*) = (ao + M)v0. A2)
5.3. Системы второго порядка и механические приложения
447
Замечание. Отличный от нуля вектор vo является собственным вектором,
соответствующим собственному значению Ао = 0, если Avo = 0. Если х(£) = (ао + M)v0,TO
х" = 0 • vo = (ао + М) * 0 = (а0 + М) • (Av0) = Ax,
что согаасуется с уравнением A2). ■
Пример 1
Рассмотрим систему, состоящую из п тел заданной массы. Пусть п = 2
и тела закреплены на пружинах так, как показано на рис. 5.3.3. Поскольку
нет никакой третьей пружины, связанной с правой стеной, мы полагаем
fc3 = 0. Если т\ = 2, Ш2 = 1, &1 = ЮО и &2 = 50, то уравнение
Мх" = Кх примет вид
2 0
0 1
х =
-150 50
50 -50
х,
A3)
что приводит нас к уравнению х" = Ах с
А =
-75
50
25
50
Характеристическое уравнение матрицы А принимает вид
(-75 - А)(-50 - А) - 50 • 25 = А2 4- 125А + 2500 =
= (А + 25)(А + 100) = 0,
так что матрица А имеет отрицательные собственные значения Ai = —25
иАг = -00. Поэтому по теореме 1 система A3) имеет решения с
[круговыми] частотами и\ = 5 и Ш2 = 10.
Положения равновесия
Рис. 5.3.3. Система примера 1,
состоящая из тела заданной
массы, закрепленного на пружине ,
Случай 1: Ai = — 25. Уравнениесобственноговектора (A — AI)v = О
имеет вид
-50
50
25
-25
так что собственный вектор, соответствующий Ai = —25, есть vi =
= [1 2]г.
448 Глава 5. Линейные системы дифференциальных уравнений
Случай 2: А2 = —100. Уравнение собственного вектора (А — AI)v =
= 0 можно записать в виде
г 25 25'
|50 50
а
Ь
=
"О"
0
так что собственный вектор, соответствующий А2 = —100, есть v2 =
= [i -if.
Из уравнения A1) следует, что общее решение системы A3)
выражается формулой
х(£) = (ai cosbt + bi sin5£)vi + (a2 cos Wt + b2 sin 10£)v2. A4)
Как и при обсуждении примера 3 из раздела 4.2, два слагаемых в
правой части уравнения A4) представляют собой свободные колебания
системы, состоящей из тела заданной массы, закрепленного на пружине.
Они описывают две собственные моды (собственные формы)
колебания физической системы при ее двух [круговых] собственных частотах
и\ = 5 и и>2 = 10. Собственная мода
*i(£) = («1 cos5£ + bi sin5t)vi = c\ cosE£ — ai)
(npnci = ^a\ + Ъ\, cosai = a\/c\ nsinai = Ь\/с\) имеет скалярные
составляющие* удовлетворяющие уравнениям
x\{i) = c\ cosE£ — ai),
#2(£) = 2c\ cosE£ — ai),
A5)
и поэтому описывает свободное колебание, в котором эти две массы
двигаются синхронно в том же самом направлении и с той же самой частотой
ш\ = 5, но амплитуда движения т2 вдвое больше, чем у т\ (рис. 5.3.4).
Собственная мода
х2(*) = (&2 cos 1Ы 4- &2 SU1 10t)v2 = с2 cosA0t — a2)
1
-1
имеет скалярные составляющие, удовлетворяющие уравнениям
x\{t) = c2cosA0£ — a2),
X2(t) = —с2 cosA0£ — а2),
A6)
и поэтому описывает свободное колебание, в котором эти две массы
двигаются синхронно в противоположных направлениях с той же самой
частотой Ш2 = 10 и с равными амплитудами колебания (рис. 5.3.5). ■
Пример 2
На рис. 5.3.6 показаны три железнодорожных вагона, связанные
буферными пружинами, которые реагируют на сжатие, но расцепляются, а не
5.3. Системы второго порядка и механические приложения 449
Рис. 5.3.4. Колебания в том же
самом направлении с частотой ш\ = 5;
амплитуда движения тела 2 вдвое
больше амплитуды тела 1
Зтс/2
Рис. 5.3.5. Колебания в
противоположных направлениях с частотой
о>2 = 10; амплитуды движения этих
двух масс одинаковы
Рис. 5.3.6. Три
железнодорожных вагона из примера 2
растягиваются. При п = 3, &2 = ^з = к и fci = к± = 0 из уравнений B)-
D) мы получаем систему
A7)
mi
0
0
шен!
0 0
7П2 0
0 т3
х" =
-к к
к -2к
0 к
гна (матричному) уравнению
х" =
—с\ c\ 0
с2 — 2с2 с2
0
сз -сз
X
0
к
-к
A8)
Ci =
ГПг
(г = 1,2,3).
A9)
Если предположить, что mi = тз,такчтос1 = сз, то краткое вычисление
дает характеристическое уравнение
-A(A + ci)(A + ci + 2c2) =0
B0)
для матрицы А коэффициентов уравнения A8). Следовательно, матрица
А имеет собственные значения
Ai =0, А2 = — ci, A3 = — с\ — 2с2,
B1а)
450
Глава 5. Линейные системы дифференциальных уравнений
соответствующие собственным частотам
U>i =0, U>2 = у/с[> Шз = \/ci + 2С2
B1Ь)
рассматриваемой физической системы.
В числовом примере предположим, что первый и третий
железнодорожные вагоны весят по 12 тонн каждый, а средний вагон весит 8 тонн
и что жесткость пружины равна к = 1,5 тонна/фут; т. е. к = 3000
фунтов/фут. Тогда удобно использовать единицы fps, и выражать массу в сла-
гах (единица массы в системе фунт-сила). (Тело весом 32 фунта имеет
массу 1 слаг (это и есть единица массы в системе фунт-сила).) Итак, мы
имеем
т\ = тз = 750, Ш2 = 500
3000
3000 „
С2 = = О.
750 ' * 500
Следовательно, матрица А коэффициентов будет
Г-4 4 0]
А = 6 -12 6 , B2)
[0 4 -4J
и пары собственных значений (частоты), определяемые равенствами B1 а)
и Blb), равны Ai = 0,u;i = 0; А2 = — 4,и>2 = 2; Аз = — 16,а>з = 4.
Случай 1: Ai = 0,u>i
принимает вид
= 0. Уравнение собственного
вектора
(А - AI)v = 0
-4 4 0"
6 -12 6
0 4-4
а
Ь
с
=
"
0
0
?
Av =
так что ясно, что vi = [ 1 1 l] —собственный вектор,
соответствующий Ai = 0. Согласно теореме 1, соответствующая часть общего решения
уравнения х" = Ах имеет вид
xi (t) = (аг +M)vi.
Случай 2: Аг = —4, о>2 = 2.
— AI) v = О имеет вид
(А + 4I)v =
Уравнение собственного вектора (А —
4
-8
4
0"
6
0
а
Ь
с
=
1
0
°J
так что ясно, что V2 = [ 1 0 — 1 ] — собственный вектор,
соответствующий Аг = —4. Согласно теореме 1, соответствующая часть общего
решения уравнения х" = Ах имеет вид
х2(£) = (а2 cos 2t + 62 sin 2t)v2.
5.3, Системы второго порядка и механические приложения 451
Случай 3: Аз = — 16,и>з
— AI) v = О имеет вид
(А + 16I)v =
4. Уравнение собственного вектора (А
12
6
О
4
4
4
0'
6
12
а
b
с
=
1
0
°J
так что ясно, что V3 = [ 1 —3 1 ] — собственный вектор,
соответствующий Аз = —16. Согласно теореме 1, соответствующая часть общего
решения уравнения х" = Ах имеет вид
хз(£) = (аз cos4t + 63 sin4£)v3.
Поэтому общее решение х = xi + Х2 + хз уравнения х" = Ах
выражается формулой
х(£) = а\
"
1
1
+ м
+ *>2
i
Г1!
1
т—1 т—1
1
0
-1
Y
+ а2
1]
0
-1J
sin 2t + аз
cos 2t +
Г 1"
-3
[ 1
cos At + bs
1]
-3
1 j
sin4t.
B3)
Чтобы найти частное решение, предположим, что крайний левый вагон
двигается вправо со скоростью vo и в момент времени t = 0 ударяет
по другим двум вагонам, которые вместе составляют единую
механическую систему, притом находящуюся в покое. Соответствующие
начальные условия имеют вид
Ж1<0) = ж2@)=я:з@) = 0, B4а)
х[ @) = v0] х'2 @) = 4 @) = 0. B4Ь)
Тогда подстановка B4а) в B3) дает скалярные уравнения
а\ + а,2 + аз = 0,
а\ — Заз = 0,
а\ - а,2 + а3 = 0,
решая которые, без труда находим а\ = а^ = аз = 0. Следовательно,
функции, выражающие положения этих трех вагонов, следующие:
х\ (t) = 6i£ -f &2 sin 2t + 63 sin 4t,
X2(t) = M — З&3 sin 4t,
xs(t) = b\t — 62 sin 2t + 63 sin4t,
а функции, выражающие скорости, такие:
x[(t) = 61 + 262 cos 2t + 4fr3cos4£,
4(t) = bi - 12b3 cos 4t9
xf3(t) = bi — 2^2 cos 2t + 4Ьз cos 41
B5)
B6)
452 Глава 5. Линейные системы дифференциальных уравнений
Подстановка B4Ь) в B6) приводит к уравнениям
h + 2Ь2 + 4fr3 = vo,
Ьг -12Ьз= О,
h - 2Ь2 + 4Ь3 = О,
из которых легко находятся Ъ\ = §г>о, £>2 = |^о и &з = ^^о- Наконец,
функции из уравнения B5) (они дают положения) принимают вид
хг (t) = ^v0(!2t + 8sin2£ + sin 4*),
x2(t) = ±v0A2t - 3sin4£), B7)
x3(t) = ^v0A2t - 8sin2£ + sin4t).
Но эти уравнения справедливы только тогда, когда две буферные
пружины сжаты; т. е. только тогда, когдаудовлетворяются оба неравенства
х2 — х\ < О и жз — Х2 < 0.
Чтобы определить, что это значит для t, мы вычисляем
x2(t) — x\{t) = -^vo(—8sin2t — 4sin4t) =
= - ±v0 (8 sin 2t + 8 sin 2t cos 2t) =
= -±v0(sin2*)(l + cos2t)
и точно так же
xs(t) - x2(t) = -±v0(sin2*)(l - cos2£).
Из этого следует, что х2 — х\ < 0 и жз — х2 < 0 до момента времени
t = 7г/2 « 1,57 (секунды); при этом значении £ из равенств B6) и B7)
получаем значения
37ruo
xi (f)=х2 (Ю=хз (I)
16
*i (£) = х'2 (Ю = °' ** (Ю = Vo-
Мы заключаем, что эти три железнодорожных вагона остаются
сцепленными и перемещаются вправо, пока не происходит разъединение в момент
времени t = 7г/2. После этого вагоны 1 и 2 остаются в покое(!), в то время
как вагон 3 продолжает двигаться вправо со скоростью vq. Если,
например, vo = 48 футов в секунду (приблизительно 33 мили в час), то эти
три вагона перемещаются на расстояние 9п « 28,27 (фута) в течение того
времени A,57 секунды), когда они сцеплены, и
Xl(t) = x2(t) = 9тг, x3(t) = 48£ - 15тг {21')
для t > 7г/2. На рис. 5.3.7 показано, что было в ситуациях "до"и
"после", а на рис. 5.3.8 показаны графики функций xi(t), x2(t) и xs{t) из
уравнений B7) и B7'). ■
5.3. Системы второго порядка и механические приложения 453
Рис. 5.3.7. Состояние вагонов: (а) — до; (Ь) — после Рис. 5.3.8. Функции, дающие
положения трех
железнодорожных вагонов из примера 2
Вынужденные колебания и резонанс
Рассмотрим систему тел заданноймассы, соединенных пружинами, показанную нарис. 5.3.2.
Предположим теперь, что кроме сил, действующих со стороны пружин, на которых
закреплено г-е тело системы, к этому телу приложена внешняя сила Fi (г = 1, 2, ..., п). Тогда
однородное уравнение Мх" = Кх заменяется неоднородным уравнением
Mx" = Kx + F, B8)
где F = [ Fi F2 ... Fn ] — вектор внешних сил для данной системы. Умножая на
М-1, получаем
х" = Ах + f, B9)
где f — внешний вектор силы на единицу массы. Нас особенно интересует случай
периодической внешней силы
f(t) = F0cosu>t C0)
(где F0—постоянный вектор). В этом случае мы ожидаем наличие периодического частного
решения
хр(£) = ccosa;t C1)
с известной внешней частотой ш9 в которое входит также некоторый вектор коэффициентов
с (его еще предстоит определить). Поскольку хр* = — ш2с cos ut9 подстановка C0) и C1)
в B9), после сокращения на общий множитель cos wt9 приводит к линейной системе
(A + a;2I)c = -F0 C2)
которую нужно решить, чтобы найти с.
Заметим, что матрица А + и>21 несингулярная (неособая), если, конечно, неверно, что
ш2 = А, собственному значению матрицы А. (Именно в этом случае уравнение C2) может
454 Глава 5. Линейные системы дифференциальных уравнений
быть решено относительно с.) Таким образом, периодическое частное решение вида,
указанного в уравнении C1), существует при условии, что частота внешней (вынуждающей)
силы не равняется одной из собственных частот ш\} о;2, ..., шп системы. Случай, в
котором и является собственной частотой, соответствует явлению резонанса, обсужденному
в разделе 3.6.
Пример 3
Предположим, что на второе тело в примере 1 действует внешняя
периодическая сила 50 cos cut. Тогда при mi = 2, m-i = \,к\ = 100, &2 = 50
и Fq = 50 из рис. 5.3.9 следует, что уравнение B9) принимает вид
х =
-75
50
25
-50
х +
0
50
cosutf,
и подстановка х = с cos о>£ приводит к уравнению
w2 - 75 25
50 ш2 - 50
с =
0
-50
C3)
C4)
для вектора коэффициентов с = [с\ с2 ] .Эта система легко решается,
и находятся значения
ci =
1250
с2 = —■
Щи2 - 75)
C5)
w
2 __
(си2 - 25) (о;2 - 100)' d {и2- 25) (и2 - 100) *
Например, если частота внешней силы, возведенная в квадрат, равна
50, то уравнение C5) дает с\ = —1, с2 = —1. Получающееся
вынужденное периодическое колебание описывается функциями
Xi(t) = — COS Ujt, X2(t) = — COS UJt.
Таким образом, наши два тела колеблются синхронно с равными
амплитудами и в том же самом направлении.
Если частота внешней силы, возведенная в квадрат, равна о;2 = 125,
то уравнение C5) дает ci = \9 с2 = —1. Получающееся вынужденное
периодическое колебание описывается функциями
x\{t) = |cosa;t, ж2(£) = — cosa;£,
причем теперь эти два тела колеблются синхронно в противоположных
направлениях, а амплитуда колебаний тела массы т2 вдвое больше
амплитуды колебаний тела массы т\.
По виду знаменателей в уравнении C5) очевидно, что с\ и с2
приближаются к +оо, когда и стремится к любой из двух собственных частот
шг = 5ио;2 = 10 (найденных в примере 1). На рис. 5.3.10 показан график
зависимости (функции) амплитуды у/с\ + с| вынужденного
периодического решения х(£) = с cos ujt от частоты ш вынуждающей силы. Пики
в Ш2 = 5 и U2 — 10 визуально демонстрируют явление резонанса. ■
5.3. Системы второго порядка и механические приложения 455
Рис. 5.3.9. Система тел
заданных масс, закрепленных на
пружинах из примера 3, на которую
действует вынуждающая сила
О 5 10 15
Частота вынуждающей силы
Рис. 5.3.10. График
зависимости амплитуды от частоты в
примере 3
Периодические решения и переходные составляющие решения
(дифференциального уравнения)
Из теоремы 4 из раздела 5.1 следует, что частное решение вынуждаемой системы
х" = Ах + F0 cos cut C6)
будет иметь форму
> x(t)=xc(t)+xp(t), C7)
где xp(t) — частное решение неоднородной системы, а хс(£) — решение соответствующей
однородной системы. Обычно именно явление трения (силы сопротивления, обусловлен
ные трением) в механических системах заглушает общее решение однородного уравнения
(функцию хс(£)), так что
хс(£) ~* 0 ПРИ * ~* +°°-
C8)
Следовательно, хс(£)—переходная составляющая решения (дифференциального
уравнения), которая зависит только от начальных условий; со временем она затухнет, останется
только установившееся периодическое решение хр(£), обусловленное внешней
движущей силой:
х(£) —> хр(£) при t —> +оо.
C9)
Йа практике каждая физическая система включает фрикционное (обусловленное трением)
сопротивление (хотя бы и маленькое), которое заглушает переходные составляющие реше-
1ия (дифференциального уравнения) так, как мы только что видели.
456 Глава 5. Линейные системы дифференциальных уравнений
В задачах 1-7 рассматривается система тел заданных масс, закрепленных на пружинах. (Такая
система показана на рис. 5.3.11.) Матрица жесткости данной системы имеет вид
К =
к2
к2
-(к2 + к3)
Кроме того, в системе МКС заданы значения жесткостей пружин и массы тел. Найдите обе
собственные частоты системы и опишите ее две собственные моды колебаний.
Iff||f|Jflff¥f?llffl!№ '^^MFfffflffffffffff*
FT1 i "
Рис. 5.3.11. Система тел заданных
масс, закрепленных на пружинах в
задачах 1-6
к\ = О, к2 — 2, кз = О (стенки отсутствуют)
к\ = 1, к2 — 4, кз = 1 3. mi = 1, т2 = 2; к\ = 1, к2 = кз = 2
к\ = 1, к2 = 2, кз = 1 5. mi = гаг = 1; к\ = 2, fe = 1, fe = 2
1. mi = 7Т12 = 1
2. mi = Ш2 = 1
4. mi = m2 = 1
6. mi = 1, m2 = 2; k\ = 2, fe = fe
7. mi = Ш2 = 1; k\ = 4, fe = 6, &з
5 задачах 8-10 указанная система тел заданных масс, закрепленных на пружинах, приведена
в движение из состояния покоя (^(О) = х'2@) = 0) в ее равновесном положении fai(O) =
= #2@) == Ф заданными внешними силами Fi(t) и F2{t), действующими на тела массой пц и тп2
соответственно. Найдите полученное в результате этого движение системы и опишите его как
результат сложения колебаний трех различных частот.
8. Та же система тел заданных масс, закрепленных на пружинах, что и в задаче 2, причем Fi (£) =
= 96cos5t, F2(t) = 0
9. Та же система тел заданных масс, закрепленных на пружинах, что и в задаче 3, причем Fi (t)=0,
F2(t) = 120 cos St
10. Та же система тел заданных масс, закрепленных на пружинах, что и в задаче 7, причем Fi (£) =
= 30cost, F2(t) = 60cost
11. Рассмотрим систему, состоящую из двух тел заданных масс mi = 1 и т2 = 1, закрепленных
на пружине. Пусть функции, выражающие смещения x(t) и t/(t), удовлетворяют
дифференциальным уравнениям
х" = -40х + 8у,
у" = Ylx - ту.
(а) Найдите две фундаментальные моды свободных колебаний системы. (Ь) Пусть эти две
массы начинают движение при начальных условиях
я?@) = 19, х'@) = 12
у@) = 3, г/@) = 6,
причем на них действуют одинаковые силы Fi(t) = F2(t) = —195 cos 7t. Опишите полученное
в результате этого движение системы как результат сложения колебаний трех различных частот.
5.3. Системы второго порядка и механические приложения 457
В задачах 12 и 13 найдите собственные частоты системы с тремя массами, показанной на
рис. 5.3.1, используя данные значения масс жесткостей пружин. Для каждой собственной
частоты ш определите отношение a1.a2.a3 амплитуд для соответствующей собственной моды
Х\ = й\ COS LJt, X2 = 0,2 COS UJt, Хз = CL3 COS UJt.
12. mi = rri2 = тз = 1; fa = fa = fa = fa = 1
13. mi = ГП2 = тз = 1; ki = fa = fa = fa = 2
{Подсказка. Одно собственное значение равно Л = — 4.)
14. В системе, изображенной на рис. 5.3.12, mi = 1, fa = 50, fa = 10 и Fo = 5 в единицах
системы МКС и о; = 10. Найдите гаг такое, чтобы в получившихся установившихся периодических
колебаниях масса тщ оставалась в покое(!). Таким образом, действие подсистемы, состоящей
из второй массы, закрепленной на пружине, должно нейтрализовать действие силы на первую
массу. Это — пример противовеса (точнее, динамического гасителя вибраций). Он имеет
электрическую аналогию, которую используют некоторые кабельные компании для предотвращения
приема некоторых кабельных каналов (пользователями, которым они не предназначены).
F(t) = F0 cos cor
Рис. 5.3.12. Механическая
система из задачи 14
15. Предположим, что rai = 2, гаг = \, fa = 75, fa = 25, Fo = 100 и uj = 10 (все в единицах
системы МКС) в вынуждаемой системе тел с заданными массами, закрепленных на пружинах
(см. рис. 5.3.9). Найдите решение системы Мх" = Кх + F, которое удовлетворяет начальным
условиям х@) = х'@) = О.
16. На рис. 5.3.13 показаны два железнодорожных вагона с буферной пружиной. Мы хотим
исследовать передачу импульса, которая происходит после соударения вагона 1 с вагоном 2, если
известно, что начальная скорость вагона 1 равна vo, а вагон 2 в момент соударения находится
в состоянии покоя. Аналогом уравнения A8) в тексте является уравнение
С2
-С2
при а = к /mi для г = 1, 2. Покажите, что собственные значения матрицы коэффициентов А
равны Ai = 0 и Л2 = — с\ — С2, причем им соответствуют собственные векторы vi = [ 1 1 ]
И V2 = [ С! -С2 ] .
*2'@) = 0
Рис. 5.3.13. Два
железнодорожных вагона из задач 16-19
17. Пусть каждый из двух вагонов из задачи 16 весит 16 тонн (так что тщ = гаг = 1000 (слагов
(единица массы в системе фунт-сила))) и к = 1 тонна/фут (т. е. 2000 фунтов/фут). Покажите,
что вагоны расцепятся через 7г/2 секунд и что x'i(t) — 0 и i'2(t) = vo после расцепления.
Таким образом, первоначальный импульс вагона 1 полностью передается вагону 2.
458 Глава 5. Линейные системы дифференциальных уравнений
18. Пусть вагоны 1 и 2 весят 8 и 16 тонн соответственно, причем к — 3000 фунтов/фут. Покажите,
что эти два вагона расцепятся через 7г/3 секунд и что
x/1(t) = ~lv0 и x'2(t) = +|г;0
после расцепления. Таким образом, после отдачи эти два вагона поедут в противоположных
направлениях.
19. Пусть вагоны 1 и 2 весят 24 и 8 тонн соответственно, и к = 1500 фунтов/фут. Покажите, что
вагоны расцепятся через 7г/2 секунд и что
x[(t) =+±vo и x2(t) = +§г;0
после расцепления. Таким образом, оба вагона продолжат двигаться в первоначальном
направлении движения, но с различными скоростями.
20. Рассмотрим систему с тремя железнодорожными вагонами, показанными на рис. 5.3.6.
Предположим, что каждый из вагонов 1 и 3 весит 32 тонны, а вагон 2 весит 8 тонн, причем жесткость
каждой пружины равна 4 тонны на фут. Пусть x'i@) = vo и х'2@) = х'3@) = 0. Покажите, что
обе пружины сжаты до момента времени t = 7г/2 и что
x'i(t) = -|г;0 и x2(t) = xz(t) - +§г;0
после этого момента времени. Таким образом, вагон 1 дает обратный ход (отскакивает), но
вагоны 2 и 3 продолжают двигаться с той же самой скоростью.
Двухосный автомобиль
В примере 4 из раздела 3.6 мы исследовали вертикальные колебания автомобиля с одной осью, т. е.
фактически одноколесного велосипеда. Теперь мы можем проанализировать более реалистическую
модель: автомобиль с двумя осями и с отдельными передней и задней подвесными системами. На
рис. 5.3.14 представлена подвесная система такого автомобиля. Мы предполагаем, что кузов
легкового автомобиля оказывает такое же действие, как и цельный брус (стержень) массы т
и длиной L — Li H- L2. Он имеет момент инерции I относительно его центра масс С, который
находится на расстоянии Li от передней части автомобиля. Автомобиль имеет переднюю и
заднюю пружины подвесной системы с константами Гука к\ и к2 соответственно. Когда автомобиль
находится в движении, пусть x(t) обозначает вертикальное смещение центра масс автомобиля
от положения равновесия; пусть также 9(t) обозначает его угловое смещение (в радианах) от
горизонтальной оси. Тогда, применяя законы Ньютона для линейного и углового ускорения, получим
уравнения движения
тх" = — (ki + k2)x -f (kiLi — k2L2)9^
D0)
IB" = (fciZa - k2L2)x - (kiLl + k2Ll)e.
c^V^i
Щ
fC
? I
x ^
*2
p , , ^ Положение
E h h%
t ^ равновесия
Рис. 5.3.14. Модель
автомобиля с двумя осями
5.3. Системы второго порядка и механические приложения 459
IL Предположим, что т = 75 слагов (единица массы в системе фунт-сила), т. е. автомобиль весит
2400 фунтов, L\ — l футов, L2 = 3 фута (это автомобиль с задним расположением двигателя),
k\ = к2 = 2000 фунт/фут и J = 1000 футфутнс2. Тогда уравнения D0) примут вид
75х" + 4000х - 80000 = 0,
10000" - 8000х -f 116,0000 = 0.
(а) Найти две собственных частоты cji и и2 автомобиля. (Ь) Теперь предположите, что
автомобиль едет со скоростью v фут в секунду по волнистому дорожному покрытию, имеющему
форму, подобную синусоиде, у которой длина волны равна 40 футам. В результате на
автомобиль будет действовать периодическая сила, частота которой равна ш = 27rv/40 = ttv/20.
Резонанс происходит при и = и\ или и = и2. Найдите две критические скорости автомобиля
(в футах в секунду и в милях в час).
{2. Предположим, что кг = к2 — к и L\ = L2 = \L на рис. 5.3.14 (симметричное расположение).
Покажите, что в этом случае каждое свободное колебание является суммой вертикального
колебания с частотой
cji = у/2к/т
и углового колебания с частотой
uj2 = y/kL2/BI).
В задачах 23-25 система, изображенная на рис. 5.3.14, взята в качестве модели незадемпфиро-
ванного автомобиля с заданными параметрами, которые измеряются в единицах Jps. (а) Найдите
фее собственных частоты колебания (в герцах). (Ь) Предположим, что этот автомобиль едет
Ш) синусоидальному волнистому дорожному покрытию с длиной волны 40 футов. Найдите две
критические скорости.
jtt. т = 100, / = 800, Li = L2 = 5, кх = к2 = 2000
. m = 100, / = 1000, Li = б, L2 = 4, кц = к2 = 2000
. т = 100, / = 800, Ьг = L2 = 5, Ал = 1000, к2 = 2000
5.3- Приложение. Колебания многоэтажных зданий,
вызванные землетрясением
этом приложении вы должны исследовать поведение семиэтажного здания, показанного
1рис. 5.3.15, во время поперечных колебаний земли, вызванных землетрясением. Предпо-
>жим, что каждый из семи [наземных] этажей весит 16 тонн, так что масса каждого этажа
шна т = 1000 (слагов, единица массы в системе фунт-сила). Также примите во внима-
яе горизонтальную силу восстановления к = 5 (тонн на фут) между смежными этажами,
ными словами, нужно учесть те внутренние силы, которые возникают в ответ на горизон-
шьные смещения каждого из этажей; эти силы показаны на рис. 5.3.16. Из этого следует,
го свободные поперечные колебания, показанные на рис.5.3.15, удовлетворяют уравнению
fx" = Кх при п = 7, mi = 1000 (для каждого г) и ki = 10000 (фунт/фут) для 1 fS г ^ 7.
460 Глава 5. Линейные системы дифференциальных уравнений
Земля
Колебания, вызванные
землетрясением
Рис. 5.3.15. Семиэтажное здание
*(*i-*i-i)
*(*, + 1-*,)
Рис. 5.3.16. Силы,
действующие на на г-й этаж
Наша система тогда приводится к форме х" = Ах с
А =
-20
10
0
0
0
0
0
10
-20
10
0
0
0
0
0
10
-20
10
0
0
0
0
0
10
-20
10
0
0
0
0
0
10
-20
10
0
0
0
0
0
10
-20
10
0
0
0
0
0
10
-10
A)
После ввода матрицы А в калькулятор TI-86 команда eigVl А приблизительно
через 15 секунд вычислила семь собственных значений, показанных в столбце Л таблицы на
рис. 5.3.17. В качестве альтернативы для вычисления собственных значений вы можете
использовать команду системы Maple eigenvals (A), команду пакета Matlab eig (А) или
команду системы Mathematica Eigenvalues[A]. Затем вычислите элементы в остальных
столбцах таблицы. Иными словами, вычислите собственные частоты и периоды колебания
«ротшмн
i
1
2
3
4
5
6
7
Собственное значение
' к '';-\"-;"- ■'■:■'=
-38,2709
-33,3826
-26,1803
-17,9094
-10,0000
-3,8197
-0,4370
Частота
' 'W'Sf^A ' '
6,1863
5,7778
5,1167
4,2320
3,1623
1,9544
0,6611
Период
Р= — (шеувд)
1,0157
1,0875
1,2280
Л,4847
1,9869
3,2149
9,5042
Рис. 5.3.17. Частбты и периоды собственных колебаний семиэтажного здания
5.3. Системы второго порядка и механические приложения 461
семиэтажного здания. Обратите внимание, что типичное землетрясение, вызывающее
наземные колебания с периодом 2 секунды, опасно из-за близости к пятой собственной частоте
(с периодом 1,9869 секунды) здания.
Горизонтальное колебание поверхности земли, вызванное землетрясением, Е cos out с
амплитудой Е и ускорением а = —Ей? cos ы£, порождает противодействующую силу инерции
F = та = тЕи2 smut на каждом этаже здания. В результате получается неоднородная
система
х" = Ах + (Ей2 cosutf)b,
B)
гдеЬ=[1 1 1 1 1 1 1] иА — матрица уравнения A). На рис. 5.3.18 показан
график зависимости максимальной амплитуды (вынужденных колебаний любого
отдельного этажа) от периода колебаний, вызванных землетрясением. Пики соответствуют первым
шести из семи резонансных частот. Мы видим, например, что, хотя землетрясение с
периодом 2 (с), вероятно, вызовет разрушительные резонансные колебания в здании, здание,
по всей вероятности, останется целым и невредимым при землетрясении с периодом 255
(с). Различные здания имеют различные собственные частоты колебаний, и поэтому какое-
нибудь конкретное землетрясение может уничтожить одно здание, но оставит нетронутым
ближайшее к нему. Эта кажущаяся аномалия наблюдалась в Мехико после разрушительного
землетрясения 19 сентября 1985 года.
10
5 8h
* Г
1—m—i—г
J I I I I I L.
0 12 3 4 5
Период (с)
Рис. 5.3.18. Резонансные
колебания семиэтажного здания—
максимальная амплитуда как
функция периода
Проведите ваше персональное исследование семиэтажного здания, полагая вес (в тоннах)
каждого этажа равным наибольшей цифре номера вашего студенческого билета. Положите
к (в единицах тонна на фут) равным наименьшей отличной от нуля цифре номера вашего
студенческого билета. Получите числовые и графические результаты, подобные показанным
нарис .5.3.17и5.3.18. Действительно ли ваше здание настолько чувствительно к колебаниям,
что есть вероятность повреждения его землетрясением с периодом, лежащим в диапазоне
от 2 до 3 секунд?
Если хотите, можете начать с решения (вручную) следующих подготовительных задач.
462 Глава 5. Линейные системы дифференциальных уравнений
1. Найти периоды собственных колебаний здания с двумя наземными этажами, каждый
из которых весит 16 тонн, причем на каждый из них действует восстанавливающая
сила, равная к = 5 тонн на фут.
2. Найти периоды собственных колебаний здания с тремя наземными этажами, каждый
из которых весит 16 тонн, причем на каждый из них действует восстанавливающая
сила, равная к = 5 тонн на фут.
3. Найти собственные частоты и собственные моды колебаний здания с тремя
наземными этажами, как в задаче 2, за исключением того, что верхние два этажа весят
8 тонн каждый, а не 16. Найдите отношения амплитуд А,ВиС колебаний этих трех
этажей в виде А: В: С, полагая А = 1.
4. Предположим, что здание из задачи 3 находится в зоне землетрясения, в котором
земля совершает горизонтальные синусоидальные колебания с периодом 3 с
амплитудой 3 дюйма. Найдите амплитуды получившихся в результате устоявшихся
периодических колебаний трех наземных этажей. Примите во внимание тот факт,
что движение Е sincjt земли с ускорением а = —Ей;2 sin ut вызывает
противодействующую силу инерции F = —та = тЕи;2 sin ut на этаж массой га.
5.4. Решения в случае кратных собственных
значений
В разделе 5.2 мы видели, что, если матрица А размера пхп имеет празличных (вещественных
или комплексных) собственных значений Ai, А2,..., Ап, соответствующих их собственным
векторам vb V2,..., vn, то общее решение системы
представляет собой функцию
х(£) = ciVieAlt + c2v2eA2t + • • • + cnvneXnt B)
с произвольными постоянными с\9 С2,..., сп. В этом разделе мы обсуждаем случай, когда
характеристическое уравнение
|А-А1|=0 C)
не имеет п различных корней, и, таким образом, имеет по крайней мере один кратный
корень.
Собственное значение имеет кратность6 к, если оно является корнем кратности к
уравнения C). Для каждого собственного значения А уравнение собственного вектора
(А - AI)v = 0 D)
имеет по крайней мере одно отличное от нуля решение v, так что есть по крайней мере
один собственный вектор, соответствующий А. Но собственное значение кратности к > 1
3 Так определенную кратность называют еще алгебраической кратностью. — Примеч. ред.
5.4. Решения в случае кратных собственных значений 463
может иметь меньше к линейно независимых соответствующих ему собственных векторов.
В этом случае мы не сможем найти "полную систему" п линейно независимых собственных
векторов матрицы А, необходимых для построения общего решения B).
Давайте называть собственное значение кратности к полным, если оно имеет к линейно
независимых соответствующих собственных векторов. Если каждое собственное значение
матрицы А полное, то, поскольку собственные векторы, соответствующие различным
собственным значениям, линейно независимы, из этого следует, что А действительно имеет
полную систему п линейно независимых собственных векторов vi, V2, ..., vn,
соответствующих собственным значениям Ai, Аг,..., Ап (каждое повторяется столько раз, какова
его кратность). В этом случае общее решение уравнения х' = Ах все еще дается обычной
суперпозицией B).
Пример 1
Найдем общее решение системы
х =
9
-6
6
4
-1
4
х.
E)
Решение Характеристическое уравнение матрицы коэффициентов в уравнении E)
имеет вид
|А-А1| =
9-А
-6
6
4 О
-1-Л О
4 3-А
= C-А)[(9-А)(-1-А) + 24] =
= C-А)A5-8А + А2) =
= E - А)C - АJ = 0.
Таким образом, А имеет простое собственное значение Ai = 5 и кратное
собственное значение Аг = 3 кратности к = 2.
Случай 1: Ai = 5. Уравнение собственного вектора (А — AI)v = О,
ще\ = [а Ь с]т, имеет вид
(А - 5I)v =
4
-6
6
4
-6
4
а
Ъ
с
=
'01
о
о
Каждое из первых двух уравнений, 4а + 46 == 0 и —6а — 66 = 0, приводит
к равенству 6 = —а. Тогда третье уравнение приводит к равенству 2а —
— 2с = 0, так что с = а. Выбирая а = 1, получаем собственный вектор
v1 = [l -1 1]Т,
соответствующий собственному значению Ai = 5.
464 Глава 5. Линейные системы дифференциальных уравнений
Случай 2: Х2 = 3. Теперь уравнение собственного вектора имеет вид
(А - 3I)v =
6
-6
6
4
-4
4
0"
0
0
а
Ь
с
=
1
0
°J
так что отличный от нуля вектор v = [ а Ъ с ] будет собственным
вектором тогда и только тогда, когда
6а + 46 = 0;
F)
т. е. при Ъ = — §а. Тот факт, что уравнение F) не содержит с, означает, что
значение с можно выбирать произвольно, лишь бы выполнялось условие
v^O. Если с = 1, то мы можем выбрать а — Ъ = 0; это дает собственный
вектор
v2=[0 0 1]Т,
соответствующий Аг = 3. Если с = 0, то мы должны выбрать а отличным
от нуля. Например, если а = 2 (чтобы избежать дробей), то Ь = — 3, так что
вторым линейно независимым собственным вектором, соответствующим
собственному значению Аг = 3 кратности 2, будет
V3
[2
0Г
Таким образом, мы нашли полную систему vi, V2, V3 трех
собственных векторов, соответствующих собственным значениям 5,3,3.
Соответствующее общее решение уравнения E) имеет вид
х(£) = civie5* + c2v2e6t + c3v3e
o3t
ci
1
-1
1
e5< + c2
e3t + c3
2
-3
0
D3t
а его скалярные составляющие функции задаются формулами
Xl(t) =
x2(t) =
x3(t) =
С1е5* +
-Cle5t
cie5* + c2e3*.
2c3e3*,
- 3c3e3*,
Замечание. Наш выбор в примере 1 этих двух собственных векторов
G)
v2=[0 0 1]Т и v3=[2
of,
соответствующих кратному собственному значению Х2 = 3, нуждается в некотором
комментарии. Тот факт, что Ь — —\а для любого собственного вектора, соответствующего
5.4. Решения в случае кратных собственных.значений 465
А2 = 3, означает, что любой такой собственный вектор может быть записан в виде
= cv2 + ^av3,
V =
а
-fa
с
= с
0
0
1
+ \а
21
-3
0
и, таким образом, является линейной комбинацией V2 и у3. Поэтому при заданных не равных
одновременно нулю а и с мы могли выбрать v, а не v3 в качестве нашего третьего собственного
вектора, и тогда новое общее решение
х(£) = CiVie5* + c2v2e3t + c3ve3t
было бы эквивалентно решению, даваемому равенством G). Таким образом, мы не должны
волноваться по поводу "правильного" выбора независимых собственных векторов,
соответствующих кратному собственному значению. Подходит любой выбор; обычно мы выбираем
самый простой подходящий вектор. ■
Дефектные собственные значения
Следующий пример показывает, что, к сожалению, не все кратные собственные значения
полны.
Пример 2
Матрица
1 -3
3 7
(8)
имеет характеристическое уравнение
|А-А1| =
1-А -3
3 7-А
= A-А)G-А) + 9 =
= А2 - 8А + 16 = (А - 4J
0.
Таким образом, А имеет единственное собственное значение Ai
кратности 2. Уравнение собственного вектора
(А - 4I)v =
-3 -3
3 3
тогда приводит к эквивалентным скалярным уравнениям
-За - 36 = 0, За + 36 = 0.
Следовательно, Ь — —а, если вектор v = [ а Ь ] , является
собственным вектором матрицы А. Поэтому любой собственный вектор,
соответствующий Ai = 4, является произведением отличного от нуля числа на
вектор v = [1 — 1 ] . Таким образом, собственное значение Ai = 4
466 Глава 5. Линейные системы дифференциальных уравнений
кратности 2 имеет только один независимый собственный вектор, и,
следовательно, не является полным7. ■
Собственное значение А кратности к > 1 называется дефектным, если оно не является
полным. Если А имеет только р < к линейно независимых собственных векторов, то число
d = k-p (9)
"отсутствующих" собственных векторов называется дефектом дефектного собственного
значения А. Таким образом, дефектное собственное значение Ах = 4 в примере 2 имеет
кратность к = 2 и дефект d = 1, потому что оно имеет только р = 1 соответствующий ему
собственный вектор8.
Если не все собственные значения матрицы А размера пхп полны, то метод собственных
значений, в том виде, как он был описан, даст меньше, чем необходимо! (а их необходимо
п) линейно независимых решений системы х' = Ах. Мы поэтому должны научиться
находить "отсутствующие решения", соответствующие дефектному собственному значению А
кратности к > 1.
Случай дефекта к = 2
Давайте начнем со случая к = 2 и предположим, что мы установили (как в примере 2),
что есть только один9 собственный вектор vx, соответствующий дефектному собственному
значению А. Ранее описанным способом мы в этом случае нашли бы только одно10 решение
> Xl(t)=VleAt A0)
уравнениях' = Ах. По аналогии со случаем кратных характеристических корней для одного
линейного дифференциального уравнения (раздел 3.3), мы можем надеяться найти второе
решение вида
x2(t) = (v2t)ext = v2text. (И)
Подставив х = v2text вх' = Ах, получим уравнение
v2eAt + \v2text = Av2text.
Но поскольку коэффициенты при обеих функциях ext и text должны быть равны, из этого
следует, что v2 = О, и, следовательно, что хг(£) = О. Это означает, что наша надежда была
напрасной: система х' = Ах не имеет нетривиального решения вида A1).
7 Максимальное число линейно независимых собственных векторов линейного оператора А на конечномерном
пространстве, отвечающих его собственному значению Л, называется геометрической кратностью скаляра Л.
Она обозначается геом, кр, (А). Геометрическая кратность собственного значения Л не превосходит
алгебраической кратности собственного значения Л (т. е. кратности собственного значения Л как корня
характеристического многочлена). В конечномерном пространстве геом. кр. (Л) = dimker(A — \Е). — Примеч. ред.
8 Здесь подразумевается, что нет других собственных векторов, которые могли бы образовать линейно
независимую систему векторов. Так что в данном случае собственный вектор определен с точностью до скаляра. —
Примеч. ред.
9 Здесь опять подразумевается, что нет других собственных векторов, которые могли бы образовать линейно
независимую систему векторов. (Авторы такие мелочи не оговаривают и считают само собой разумеющимися
из контекста.) Так что в данном случае собственный вектор определен с точностью до скаляра. — Примеч. ред.
10 Здесь опять подразумевается, что нет других решений, которые могли бы образовать линейно независимую
систему решений. (Авторы такие мелочи не оговаривают и считают само собой разумеющимися из контекста.)
Так что в данном случае решение определено с точностью до скаляра. — Примеч. ред.
5.4. Решения в случае кратных собственных значений 467
Вместо того чтобы просто отбросить эту идею и разочаровываться в равенстве (И),
давайте немного обобщим эту идею и заменим v2t вектором vit 4- V2, Таким образом, мы
исследуем возможность наличия второго решения вида
> x2(t) = (Vl* + v2)eAt = viteA* + v2eAt, A2)
где vi и v2 —постоянные отличные от нуля векторы. Когда мы подставим х = v\text + v2eAt
в уравнение х' = Ах, мы получим уравнение
viext + AviteAt + Av2eAt = AvxteAt. + Av2eAt. A3)
Мы приравниваем коэффициенты при eXt и text и таким образом получаем следующие два
уравнения:
(А - AI)Vl = О A4)
(A-AI)v2=vb A5)
которым должны удовлетворять векторы vi и v2, чтобы вектор A2) был решением х' = Ах.
Обратите внимание, что уравнение A4) просто подтверждает, что vi—собственный
вектор, соответствующий собственному значению А матрицы А. Тогда уравнение A5) говорит,
что вектор v2 удовлетворяет уравнению
(А - AIJv2 = (А - А1)[(А - AI)v2] = (А - AI)vi = О.
Из этого следует, что для того, чтобы решить систему этих двух уравнений A4) и A5),
достаточно нaйтикaкoe-нибyдьpeшeниev2oднoгoypaвнeния(A — AIJv2 = Отакое, чтобы
удовлетворяющий ему вектор vi = (А — AI) v2 был отличным от нуля. Оказывается, что
это всегда возможно, если дефектное собственное значение А матрицы А имеет кратность
2. Следовательно, процедура, описанная в следующем алгоритме, всегда позволяет найти
два независимых решения, соответствующих такому собственному значению.
АЛГОРИТМ
[Дефектные срфственжмеанрчэния кратности 2
1. Сначала найдите отличное от нуля решение V2 уравнения
(A-AIJv2 = 0, A6)
такое что вектор
(A-AI)v2=vi A7)
отличен от нуля, и поэтому собственный вектор vi соответствует собственному
значению А.
2. Затем постройте два независимых решения
X!(t) = VleAt A8)
468
Глава 5. Линейные системы дифференциальных уравнений
x2(t) = (vit + v2)eA*
уравнения х' = Ах, соответствующих А.
A9)
А
Пример 3
Найдем общее решение системы
-3
7
B0)
Решение В примере 2 мы нашли, что матрица А коэффициентов в уравнении B0)
имеет дефектное собственное значение А = 4 кратности 2. Мы поэтому
начинаем с вычисления
(А - 4IJ =
"-3
3
-3'
3
-3
3
-3'
3
"о
0
0"
0
Следовательно, уравнение A6) принимает вид
V2
и поэтому удовлетворяется при любом выборе вектора v2. В принципе,
может случиться так, что вектор (А — 41) v2 отличен от нуля (как и нужно)
для некоторых выбранных значений v2, хотя и не для всех. Если мы
пробуем взять v2 = [ 1 0 ] , мы найдем, что вектор
(А - 4I)v2 =
"-3 -3'
3 3
"Г
0
=
-3"
3j
= Vi
отличен от нуля, и поэтому является собственным вектором,
соответствующим А = 4. (Это в —3 раза увеличенный собственный вектор,
найденный в примере 2.) Поэтому двумя решениями уравнения B0), найденными
из равенств A8) и A9), будут
xi(t)=Vle4t
x2(*) = (vi* + v2)e4t =
At
-3£+1
At
Полученное в результате общее решение
х(£) = cixi(£) + c2x2(£)
имеет скалярные составляющие (функции)
Xl(t) = (Sc2t + с2- 3ci)e4t,
x2(t) = Cc2t + 3c1)e4t.
5.4. Решения в случае кратных собственных значений 469
Рис. 5.4.1. Поле направлений
и интегральные кривые линейной
системы х[ = х\ — За?2, х'2 =
= 3a?i + 7x2 из примера 3
I
При С2 = 0 решения этих уравнений приводят к уравнениям x\(t) —
— — 3cie4t, X2(t) = 3cie4t, которые параметризуют прямую линию
х\ = —Х2 на плоскости OxiX2> Точка (xi(tIX2{t)) тогда удаляется по
этой линии от начала координат при t —> +оо к северо-западу, если
с\ > О, и к юго-востоку, если с\ < 0. Как показано на рис. 5.4.1, каждая
интегральная кривая при С2 ф 0 касается прямой линии х\ = —Х2 в
начале координат; точка {х\ (£), Х2(£)) приближается к началу координат при
t —* — оо и стремится к +оо по интегральной кривой при t —» +оо. ■
Обобщенные собственные векторы
Вектор v2 в уравнении A6) служит примером обобщенного собственного вектора. Если
матрица А имеет собственное значение А, то обобщенный собственный вектор ранга г,
соответствующий Л, — это такой вектор v, что
> (А - AI)rv = О, но (А - Xiy-W ф О. B1)
Если г = 1, то равенство B1) просто означает, что собственный вектор v соответствует
собственному числу А. Таким образом, обобщенный собственный вектор ранга 1 — это
обыкновенный собственный вектор. Вектор v2 в равенстве A6)—обобщенный собственный
вектор ранга 2 (а не обыкновенный собственный вектор).
Ранее описанный метод в случае кратности 2 сводится к нахождению пары обобщенных
собственных векторов {vi, v2}, причем первый из них должен иметь ранг 1, а второй —
ранг 2, и, кроме того, должно выполняться равенство (А — AI)v2 = vi. В случае более
высокой кратности для применения метода необходима более длинная цепочка
обобщенных собственных векторов11. Цепочка (длины к) обобщенных собственных векторов,
начинающаяся с собственного вектора12 vi, —это последовательность {vi, V2,..., Vfc}
11 Цепочка обобщенных собственных векторов иногда называется также серией. — Примеч. ред.
12 В таком случае иногда также говорят, что цепочка основана на этом собственном векторе или что он лежит
в ее основании. — Примеч. ред.
470 Глава 5. Линейные системы дифференциальных уравнений
из к обобщенных собственных векторов, такая что .
(A-AI)v* = vfc_i,
(A-AI)vfc_i = vfc_2,
> B2)
(A-AI)v2=vi.
Поскольку vi — обыкновенный собственный вектор, (А — AI)vi = 0. Поэтому из B2)
следует, что
(А - AI)fcvfc = О. B3)
Если {vi, v2, V3} — цепочка длины 3 из обобщенных собственных векторов,
соответствующих кратному собственному значению А матрицы А, то просто проверить, что три
линейно независимых решения уравнениях' = Ах выражаются формулами
Xi(*)=vxeAt,
> x2(*) = (Vlt + v2)eAt, B4)
*з(*) = (lv^2 + v2* + v3) eXt.
Например, уравнения B2) дают
Av3=v2 + Av3, Av2=vi + Av2, Avi = Avi,
так что
Ax3 = [|Avit2 + Av2t + Av3] eXt =
= [|Avit2 + (vi + Xv2)t + (v2 + Av3)] ext =
= (vit + v2)eAt + A (^vit2 + v2t + v3) ext =
= 4.
Поэтому x3 (t) в B4) действительно определяет решение уравнения х' = Ах.
Следовательно, чтобы учесть кратность 3 собственного значения А, достаточно найти
цепочку (длины 3) обобщенных собственных значений {vi, v2, v3 }, соответствующих А. Из
уравнения B3), видно, что достаточно найти только решение v3 уравнения
(А - AIKv3 = О,
такое что оба векторы
v2 = (А — AI)v3 и vi = (А — AI)v2
отличны от нуля (как мы увидим потом, это не всегда возможно).
5.4. Решения в случае кратных собственных значений 471
Пример 4
Найдем три линейно независимых решения системы
0
-5
1
1
-3
0
2
-7
0
X.
B5)
-А
-5
1
1
-3-А
0
2
-7
-А
Решение Характеристическое уравнение матрицы коэффициентов уравнения B5)
имеет вид
|А-А1| =
= 1. [_7 - 2 • (-3 - Л)] +.(-А)[(-А)(-3 - Л) + 5] =
= -А3 - ЗА2 - ЗЛ - 1 = -(А + IK = О,
и, таким образом, матрица А имеет собственное значение А = — 1
кратности 3. Уравнение собственного вектора (А — AI)v = 0 для собственного
вектора v = [ а Ь с ] имеет вид s
1
-5
1
1
-2
0
2
-7
1
а
Ь
с
==
0
0
0
(А + I)v =
Третья строка а + с = 0 дает с = —а, тогда первая строка а + Ъ + 2с =
= 0 дает Ь — а. Таким образом, с точностью до постоянного множителя,
собственное значение А = — 1 имеет только один соответствующий ему
собственный вектор v = [ а а —а] с а ^ 0, и потому дефект
собственного значения А = — 1 равен 2.
Чтобы применить описанный здесь метод для тройного собственного
значения13, сйачала вычисляем
(А + 1J =
1
5
1
1
-2
0
2"
-7
1
1
-5
1
1
-2
0
2"
-7
1
=
-2 -1 -3
-2 -1 -3
2 13
(А + 1K =
1
5
1
1
-2
0
2]
-7
1
-2
-2
2
-1
-1
1
-3'
-3
3
=
0 0 0
0 0 0
0 0 0
Таким образом, любой отличный от нуля вектор V3 будет решением
уравнения (А + 1KУз = О. Начиная, например, с V3 = [ 1 0 ' 0 ] , мы
13 Под тройным (двойным и т. д.) собственным значением, естественно, подразумевается, что данное
собственное значения является тройным (двойным и т. д.) корнем характеристического уравнения. —Приме*, ред.
472 Глава 5. Линейные системы дифференциальных уравнений
вычисляем
1
5
1
1
-2
0
2'
-7
1
"
0
0
=
1]
-5
lj
1
5
1
1
-2
0
2'
-7
1
1"
-5
1
=
"-21
-2
2J
v2 = (А + I)v3 =
vi = (A + I)v2 =
Заметьте, что vi — ранее найденный собственный вектор v при а — — 2;
такое совпадение позволяет проверить правильность проведенных нами
вычислений с матрицами.
Таким образом, мы нашли цепочку длины 3 обобщенных собственных
векторов {vi, v2, V3}, соответствующих тройному собственному
значению Л = — 1. Подстановка в равенство B4) теперь дает линейно
независимые решения
xi (t) =vie =
-2
-2
2
x2(t) = (vi£ + v2)e"
-2t+l
-2*-5
2*4-1
-t
-t2 + t + 1
-t2 - bt
t2 + t
системы x' = Ax.
Общий случай
Фундаментальная теорема линейной алгебры утверждает, что каждая матрица А размера
п х п имеет п линейно независимых обобщенных собственных векторов. Эти п обобщенных
собственных векторов могут быть размещены в цепочках так, что сумма длин цепочек,
соответствующих данному собственному значению Л, равна кратности Л. Но структура
этих цепочек зависит от дефекта собственного значения Л и может быть весьма сложной.
Например, собственное значение кратности 4 может соответсвовать
• четырем цепочкам длины 1 (дефект 0);
• двум цепочкам длины 1 и одной цепочке длины 2 (дефект 1);
• двум цепочкам длины 2 (дефект 2);
• одной цепочке длины 1 и одной цепочке длины 3 (дефект 2);
• одной цепочке длины 4 (дефект 3).
Обратите внимание, что в каждом из этих случаев длина самой длинной цепочки не
превышает d 4-1, где d — дефект собственного значения. Следовательно, как только мы нашли
5.4. Решения в случае кратных собственных значений 473
все обыкновенные собственные векторы, соответствующие кратному собственному
значению Л, и поэтому узнали дефект d собственного значения Л, мы можем начать с решения
уравнения
> (А - AI)rf+1u = О B6)
для построения цепочки обобщенных собственных векторов соответствующих
собственному значению Л.
АЛГОРИТМ
Цепрчки обобщенных^ообст^нйх значений
Начните с отличного от нуля решения ui уравнения B6) и последовательно умножайте его
на матрицу А — AI до получения нулевого вектора. Если
(А - AI)ui = u2 ф О,
(А - AI)ufc-i = ик ф О,
но (А — AI)iifc = О, то векторы
{Vi, V2, . . . , Vfc} = {Ufc, Ufc-i, . • • , U2, Ui}
(перечисленные в порядке, обратном их появлению) образуют цепочку (длины к)
обобщенных собственных векторов, основанных на (обыкновенном) собственном векто-
pevi. A
Каждая цепочка длины к обобщенных собственных векторов {vi, v2,..., v^ } (в которой
vi — обыкновенный собственный вектор, соответствующий А) определяет набор к
независимых решений уравнениях' = Ах, соответствующих собственному значению А:
xi(£)=VleAt,
x2M = (vi£ + v2)eAt,
Обратите внимание, что уравнение B7) сводится к уравнениям A8)—A9) и B4) в случаях
к = 2 и к = 3 соответственно.
Но можно ли гарантировать, что мы получим п обобщенных собственных векторов
матрицы А размера п х п, которые на самом деле будут линейно независимыми? (Ведь только
в этом случае они порождают полную систему п линейно независимых решений уравнения
х' = Ах, когда мы объединим все цепочки решений, соответствующие различным
цепочкам обобщенных собственных векторов.) Оказывается, да! И эта уверенность основана на
следующих двух утверждениях.
47$ Глава 5. Линейные системы дифференциальных уравнений
Любая цепочка обобщенных собственных векторов состоит из линейно независимых
векторов.
Если две цепочки обобщенных собственных векторов основаны на линейно независимых
собственных векторах, то объединение этих двух цепочек есть линейно независимая
система векторов (причем это утверждение сраведливо, независимо от того, соответствуют
ли два основных собственных вектора различным собственным значениям или одному
и тому же самому собственному значению).
Пример 5
Предположим, что матрица А размера б х б имеет два собственных
значения Ai = — 2 и А2 = 3 кратности 3 с дефектами 1 и 2 соответственно.
Тогда Ai должно иметь соответствующий собственный вектор ui и
цепочку (длины 2) обобщенных собственных векторов {vi, v2} (причем
собственные векторы щ и vi линейно независимы), тогда как Х2 должно
иметьцепочкудлиныЗобобщенныхсобственныхвекторов^!, w2, W3},
основанных на одном собственном векторе wi. Шесть обобщенных
собственных векторов ui, vi, v2, wi, w2 и W3 тогда будут линейно
независимы и приведут к следующим шести линейно независимым решениям
уравнения х' = Ах:
xi(£) = uie-2t,
x2(£) = Vle-2t,
x3W = (vi* + v2)e-2t,
X4(t) = wxe3t,
x5(£) = (wi£ + w2)e3t,
x6(t) = (|wit2 + w2t + w3) e3t. ■
Как иллюстрирует пример 5, вычисление независимых решений, соответствующих
различным собственным значениям и цепочкам обобщенных собственных значений,—обычная
рутинная процедура. Определение структуры цепочки, соответствующей данному кратному
собственному значению, может быть более интересным (как в примере 6).
Приложение-пример: соединенные пружинами вагоны с демпфером
На рис. 5.4.2 показаны два железнодорожных вагона, которые связаны пружинами
(постоянно прикрепленными к обоим вагонам) и демпфер, который прикладывает противоположные
силы к этим двум вагонам, причем величина этих сил равна с(х'г — х2) , т. е.
пропорциональна относительной скорости вагонов. На эти два вагона также действуют силы трения
(сопротивление движению) cix[ и с2х2, пропорциональные их соответствующим
скоростям. Применение закона Ньютона та = F (как в примере 1 из раздела 4.1) приводит
к уравнениям движения
т\х" = fc(#2 ~ xi) - ax[ - с(х[ - х'2),
■ т2х2 = к(х± — х2) — с2х2 — с(х'2 — х'х).
5.4. Решения в случае кратных собственных значений 475
Рис. 5.4.2. Железнодорожные
вагоны из примера 6
Вводя радиус-вектор x(t) = [ х\ (t) x<i (t) ] , эти уравнения можно записать в матричной
форме в виде
Мх" = Кх + Rx', B9)
где М и К—матрицы массы и жесткости (как в уравнениях B) и C) из раздела 5.3), а
R =
-(c + ci) с
С -(С + С2)
—матрица сопротивления. К сожалению, из-за присутствия члена, содержащего х', методы
раздела 5.3 не могут использоваться напрямую.
Вместо этого мы перепишем систему B8) в виде системы первого порядка с четырьмя
неизвестными функциями x\(t)9 X2(t), xz{t) — x[(t) H^(t) = x'2{t). Если m\ = Ш2 = 1,
мы получаем уравнение
Ах,
где теперь х = [х± Х2 хз х±] и
А =
0 0 1 0
0 0 0 1
-к к — (c + ci) с
к —к с —(с + С2)
C0)
C1)
Пример 6
При mi = Ш2
принимает вид
= с=1и& = С1=;С2 = 2 система уравнений C0)
0
0
2
2
0
0
2
-2
1
0
-3
1
0
1
1
-3
X.
C2)
Не слишком утомительно вычислить ее характеристическое уравнение
вручную, хотя система компьютерной алгебры, такая как Maple,
Mathematical или Matlab, может оказаться весьма полезной для такого рода
вычислений. Как бы то ни было, мы нашли характеристическое
уравнение:
Л4 + 6Л3 + 12Л2 + 8Л = Л(Л + 2K = 0
матрицы А коэффициентов уравнения C2). Таким образом, матрица А
имеет простое собственное значение Ло = 0 и тройное собственное
значение Ai = —2.
476
Глава 5. Линейные системы дифференциальных уравнений
0
0
2
2
0
0
2
-2
1
0
-3
1
0
1
1
-3
а
Ь
с
a
0
0
0
0
Случай 1: Ао = 0. При этом собственном значении уравнение (А —
— AI)v = О для собственного вектора v = [ а Ь с d ] принимает
вид
Av =
Первые две строки дают с = d = 0, тогда как последние две строки влекут
а = Ь. Таким образом,
v0= [1 1 0 0]Т
— собственный вектор, соответствующий Ао = 0.
Случай 2: Ai = —2. При этом собственном значении уравнение (А —
— AI) v = О принимает вид
2
0
-2
2
0
2
2
-2
1
0
-1
1
0
1
1
-1
а
Ь
с
d
0
0
0
0
(A + 2I)v =
Третье и четвертое скалярные уравнения здесь представляют собой
разности первого и второго уравнений и поэтому избыточны. Следовательно,
v определен первыми двумя уравнениями:
2а + с = 0 и 26 + d = 0.,
Мы можем выбрать аиЬ независимо, а затем решить полученные
уравнения относительно end. Таким образом мы получим два собственных
вектора, соответствующих тройному собственному значению Ai = —2.
Выбор а = 1, Ъ = 0 дает с = — 2, d = 0 и, таким образом, получаем
собственный вектор
ui= [1
0 -2
оГ
Выбор а = 0, Ь = 1 дает с = 0, d = — 2 и, таким образом, получаем
собственный вектор
U2= [0
0 -2\
Поскольку дефект собственного значения Ai = —2 равен 1, нужно
найти обобщенный собственный вектор ранга 2 и, следовательно, нужно
найти отличное от нуля решение V2 уравнения
(А + 2IJv2 =
2 2 11
2 2 11
0И 0 0 0
00 0 0
v2 =0.
5.4. Решения в случае кратных собственных значений 477
Очевидно,
v2 = [0 0 1 -1]Т
— как раз и есть такой вектор, и мы находим, что вектор
(А + 2I)v2
2
О
-2
2
О
2
2
-2
1
0
1
1
0"
1
1
-1
0"
0
1
-1
1
1]
-1
-2
2\
Vi
отличен от нуля, и поэтому он и есть искомый собственный вектор,
соответствующий собственному значению Ai = —2. Тогда {vi,V2} —нужная
нам цепочка длины 2.
Только что найденный собственный вектор vi не совпадает ни с
одним из ранее найденных двух собственных векторов ui и U2, но, как легко
заметить, vi = ui — 112. Для цепочки (длины 1) wi мы можем выбрать
любую линейную комбинацию щ и U2, которая является независимой от
vi. Например, мы можем выбрать wi = ui или wi = 112. Однако мы
мгновенно увидим, что конкретный выбор
wi = ui+u2=[l 1 -2 -2]Т
приводит крешению системы, которое представляет физический интерес.
Наконец, цепочки {v0}, {wi} и {vi, V2} приводят к четырем
независимым решениям
x1(t)=v0e°-*=[l 1 0
of,
-2t
[1 1-2 -2]
2]
x2(i) = wie
xs(t) = vxe-2' = [ 1 -1
x4(i) = (v1i + v2)e-2' =
= [t -t -2* + 1 It - 1 ]
T „-it
T „-.at
C3)
Te-2'
системы C2), имеющей вид x' = Ax.
Четыре скалярных компонента общего решения
х(£) = cixi(t) + с2х2(£) 4- c3x3(t) + с4х4(£)
описываются уравнениями
#1 (*) = ci Н- e~2t(c2 + с3 + с4£),
X2(t) = ci + e~2t(c2 - с3 - с4*),
xs{t) = e~2t(-2c2 - 2с3 + с4 - 2с4£),
a*(*) = e~2t(-2c2 Н- 2с3 - с4 4- 2с4*).
C4)
Осталось только вспомнить, что функции xi(t) и X2(t) дают положения
этихдвухтел,афункцииа:з(^) = Xi(t)nx4{t) = #2№~соответствУюЩие
скорости.
478 Глава 5. Линейные системы дифференциальных уравнений
Предположим, например, что х\@) = хг@) = 0 и что ^(О) =
= х2@) = vq. Тогда легко решаются уравнения
Xl@) = с\ + с2 + с3 =0,
#2@) = ci + с2 - с3 =0,
#i(°) = - 2cj2 - 2с3 + с4 = vo,
ж2(°) = - 2с2 + 2с3 - с4 = vo,
и мы находим ci = |г;о, с2 = — |г?о и сз = с4 = 0, так что
xi{t) = x2{t) = \vo{l-e-2t),
Xi(t) = x'2(t) =v0e-2t.
В этом случае наши два железнодорожных вагона продолжают двигаться
в том же самом направлении с равными, но экспоненциально
уменьшающимися скоростями, приближаясь к смещениям х\ = х2 = \vq при
t —► -boo.
Представляет интерес физическая интерпретация конкретного
решения C3), полученного с помощью обобщенных собственных векторов.
Вырожденное (при Ао = 0) решение
xi(*)=[l 1 О 0]Т
описывает состояние покоя этих двух масс; вот функции, выражающие
положения вагонов: х\ (t) = 1 и #2(£) = 1. Решение
х2(*)=[1 1 -2]
т -2t
соответствующее тщательно выбранному собственному вектору wi,
описывает затухающие движения #i (£) = е~2*и:г2(£) = e~2t этих двух масс
с равными скоростями в том же самом направлении. Наконец, обарешения
хз(£) и х4(£), получающиеся из цепочки (длины 2) {vi, v2}, описывают
затухающие движения этих двух масс, двигающихся в противоположных
направлениях. ■
Методы этого раздела применимы не только к комплексным кратным собственным
значениям, но и к вещественных кратным собственным значениям (хотя необходимые вычисления
бывают несколько длинными). Если мы имеем комплексно сопряженную пару а± /3i
собственных значений кратности fc, мы работаем с одним из них (например, а — /Зг) как будто на
самом деле мы хотим найти к независимых комплексных решений. Вещественные и мнимые
части этих комплексных решений тогда дают 2fc действительных решений,
соответствующих этим двум собственным значениям Л = а — (Зг и Л = а + (Зг, каждое из которых иадеет
кратность к. Этому посвящены задачи 33 и 34.
5.4. Задачи
Найдите общие решения систем в задачах 1-22. В задачах 1-6 используйте компьютерную систему
или графический калькулятор, чтобы нарисовать поле направлений и типичные интегральные
кривые данной системы.
5.4. Решения в случае кратных собственных значений 479
1. х' =
3. х' =
5. х' =
7. х' =
9. х' =
11. х' =
13. х' =
15. х' =
17. х' =
19. х' =
21. х' =
-2 1
-1 -4
1 -2
2 5
7
-4
2
-7
0
-19
0
-8
-3
-1
1
-1
0
0
-2
1
1
1
18
-27
1
0
6 -
0
-1
1
1
0
1'
3
0
9
0
X
0]
7
2\
X
12 84]
0
-1
0
0
1
1
-9
4
3
С
7
-S
-4
1
12
-4
-4
3
2
1
5 0 я
4 33 J
-4]
-1
1J
1]
-4
-3J
0]
0
IJ
> 0
4
I -5
X
X
X
T
X
0 -2]
0 0
-1 -6
0 -lj
0 0]
0 0
1 0
0
lj
2. x7 =
4. x7 =
6. x =
8. x7 =
10. x7 =
12. x7 =
14. x7 =
16. x7 =
18. x7 =
20. x7 =
22. x7 =
3 -1
1 1
з -Г
1 5
1 -4"
4 9
x
X
X
25 12
-18 -5
6 6
-13 40
-8 23
0 0
-1 0
0 -1
1 -1
0 0
-5 -1
4 1
1 0
-2 -2
2 3
1 0
1 3
-2 -4
2 1
0 2
0 0
0 0
1 3
0 -1 -
0 1
0 -6
—
°1
0
13 J
-48"
-24
3
Г
1
-1_
Г
-5
-2
0"
-3
4_
0"
1
-1
'x
x
X
X
0 Г
1 0
2 1
0 2
7 0
-4 0
3 0
14
1
В задачах 23-32 даются собственные значения матрицы А коэффициентов. Найдите общее
решение указанной системы х! = Ах. В задачах 29-32 может быть особенно полезно использовать
систему компьютерной алгебры (как в прикладном материале этого раздела).
23. х7 =
39
36
72
Л = -1, 3, 3
8 -16
-5
16
16
-29
х7 =
"-2
-1
0
Л = 2, 2, 2
х7 =
"-3
3
8
17
6
1
5
-1
-8
4
1
2
-5]
3
10 j
х;
х;
х;
Л = 2, 2, 2
Г 28 50 100
24. х7 = 15 33 60
[ -15 -30 -57
Л = -2, 3, 3
[5-1 1
26. х7 = 1 3 0
[-3 2 1
Л = 3, 3, 3
Г-15 -7 4
28. х7 = 34 16 -11
[ 17 7 5
Л = 2, 2, 2
х;
х;
х;
480 Глава 5. Линейные системы дифференциальных уравнений
29. х' =
'-1 1 1-2"
7 -4 -6 11
5-113
6-2-2 6
х;
Л = -1,-1,2,2
31. х' =
А = 1,
35 -12 4 30]
22 -8 3 19
-10 3 0-9
-27 9 -3 -23
1,1,1
х;
30. х' =
'2
1
0 3
0 -13
0 -27
А = -1,-1,2,2
32. х' =
' 11 -1
0 3
-9 0
3 0
-48 -3
А = 2, 2, 3, 3, 3
1 А коэффициентов системь
3-4 1 0"
4 3 0 1
0 0 3-4
0 0 4
3
X
-2
-5
22 -
45 -\
26
0
-24
9
-138
[
1"
3
L2
25
х;
6
0
-6
5
-30
-3
0
3
-1
18
имеет вид
ф(Х) = (А2 - 6А + 25J = 0.
Поэтому А имеет кратную комплексно сопряженную пару собственных значений 3=Ь4г. Сначала
покажите, что комплексные векторы
vi
[1 i 0 0]Т и v2=[9 0 1 i\
образуют цепочку (длины 2) {vi, V2}, соответствующую собственному значению А = 3 — 4г.
Затем вычислите вещественные и мнимые части комплексных решений
vieAt и (vit + v2)eAt,
чтобы найти четыре независимых действительных решения уравнения х' = Ах.
34. Характеристическое уравнение матрицы А коэффициентов системы
2
18
-9
33
0
-1
-3
10
-8
0
-25
90
-3
0
-9
32
имеет вид
ф{\) = (Л2 - 4А + 13J = 0.
Поэтому матрица А имеет кратную комплексно сопряженную пару собственных значений 2=ЬЗг.
Сначала покажите, что комплексные векторы
vi = [ -г
v2= [3
З + Зг
-10 + 9г
0
—г
-<Г.
of
образуют цепочку (длины 2) {vi, V2}, соответствующую собственному значению А = 2 + Зг.
Затем вычислите (как в задаче 33) четыре независимых действительных решения уравнения
х' = Ах.
5.4. Решения в случае кратных собственных значений 481
35. Найдите функции xi(t) и X2(t), дающие положения железнодорожных вагонов, показанных на
рис. 5.4.1, если известны следующие физические параметры:
7711 = ТП2 =Ci=C2=C=fc=l
и заданы следующие начальные условия:
tfi(O) = я?2@) = 0, a?i@) = х2@) = v0.
На какое расстояние переместятся вагоны перед остановкой?
,36. Повторно решите задачу 35 при предположении, что вагон 1 экранирован от сопротивления
воздуха вагоном 2, так что теперь а = 0. Покажите, что теперь до остановки вагоны проедут
вдвое большее расстояние, чем было вычислено в задаче 35.
5.4. Приложение. Дефектные собственные значения
и обобщенные собственные векторы
Типичная система компьютерной алгебры может вычислить и собственные значения данной
матрицы А, и линейно независимые (обыкновенные) собственные векторы,
соответствующие каждому собственному значению. Пусть, например, имеем матрицу размера 4x4
А ~^ _1П Q П _0 У*'
из задачи 31 этого раздела. После ввода матрицы А команда системы Maple
with(linalg): eigenvectors(A);
[1, 4, {[-1, 0, 1, 1], [0, 1, 3, 0]}]
и команда системы Mathematica
Eigensystem [A]
{{1,1,1,1},
{{-3,-1,0,3}, {0,1,3,0}, {0,0,0,0}, {0,0,0,0}}}
вычисляет, что матрица А в уравнении A) имеет единственное собственное значение Л = 1
кратности 4, причем ему соответствуют только два независимых собственных вектора vi
и V2. Команда пакета МATLAB
[V, D] = eig(sym(A))
выдает ту же самую информацию. Поэтому дефект собственного значения Л = 1 равен
d = 2. Полагая В = А — AI, убедитесь, что В2 ф О, но В3 = О. Если
ui = [l 0 0 0]Т, u2 = Bui, u3=Bu2,
то {ui,U2,U3} — цепочка обобщенных собственных векторов длины 3, основанных на
обыкновенном собственном векторе из (который должен быть линейной комбинацией
первоначальных собственных векторов vi и v2). Используйте вашу систему компьютерной
35
22
10
27
-12
-8
3
9
4
3
0
-3
30
19
-9
-23
482 Глава 5. Линейные системы дифференциальных уравнений
алгебры, чтобы выполнить это построение, и, наконец, написать четыре линейно
независимых решения линейной системы х' = Ах.
Давайте теперь исследуем более экзотическую матрицу. Для этого в качестве примера
выберем матрицу из галереи пакета MATLAB с помощью команды gallery E)
А =
-9
70
-575
3891
1024
11
-69
575
-3891
-1024
-21
141
-1149
7782
2048
63
-421
3451
-23345
-6144
-252
1684
-13801
93365
24572
B)
Используя соответствующие команды, подобные приведенным здесь, покажите, что матрица
А имеет единственное собственное значение А = 0 кратности 5 и дефекта 4. Поскольку
А — @I = А, вы должны найти, что А4 ^ 0, но что А^ '-.==* О. Следовательно, вычислите
векторы
ui = [ 1 0 0 0 0] , U2 = Aui, 113 = Ац2, U4 = Аиз, U5 = Ащ.
Вы должны найти, что 115 — отличный от нуля вектор, такой что А115 = 0, и поэтому он
является (обыкновенным) собственным вектором, соответствующим собственному значению
А = 0. Таким образом, {ui, 112,113, щ, U5} — цепочка длины 5 обобщенных собственных
векторов матрицы А из равенства B), и потому вы можете, наконец, написать пять линейно
независимых решений линейной системы х' = Ах.
5.5. Экспоненциальная функция от матрицы
и линейные системы
Векторы решения однородной линейной системы
> х' = Ах
A)
можно использовать для построения матрицы X = Ф(£), которая удовлетворяет
матричному дифференциальному уравнению
X' = АХ,
A0
соответствующему уравнению A). Предположим, что xi(£), X2(£),..., хп(£) — п линейно
независимых решений уравнения A). Тогда матрица размера пх п
*(*) =
xi (t) x2(t) ••• xn(f)
B)
столбцами которой являются эти векторы-решения, называется фундаментальной
матрицей системы A).
5.5. Экспоненциальная функция от матрицы и линейные системы 483
Фундаментальные матричные решения
Поскольку вектор-столбец х = Xj(t) фундаментальной матрицы Ф(£) в B) удовлетворяет
дифференциальному уравнению х' = Ах, сама матрица X = Ф(£) удовлетворяет
матричному дифференциальному уравнению X' = АХ. Поскольку ее векторы-столбцы линейно
независимы, фундаментальная матрица ф(£) несингулярна (неособая), и поэтому имеет
обратную матрицу Ф(£)-1. Наоборот, любая несингулярная (неособая) матрица Ф(£),
являющаяся решением уравнения A/), имеет линейно независимые векторы-столбцы, которые
удовлетворяют уравнению A), так что Ф(£) — фундаментальная матрица системы A).
Если использовать фундаментальную матрицу Ф(£), определяемую равенством B),
общее решение
> X(t) = CiXi(t) + C2X2(£) + • • • + CnXn(t) C)
системы X' =! AX можно записать в форме
> x(t) = Ф(*)с, D)
где с = [а С2 ... Сп]т — произвольный постоянный вектор. Если Ф(£) — любая
другая фундаментальная матрица системы A), то каждый вектор-столбец Ф(£) — линейная
комбинация векторов-столбцов матрицы Ф(£), так что из уравнения D) следует, что
ф(*) = Ф(*)С D')
для некоторой матрицы С констант размера п х п.
Чтобы решение х(£), даваемое равенством C), удовлетворяло данному начальному
условию
х@) = х0, E)
достаточно выбрать вектор коэффициентов с в D) так, чтобы Ф@)с = хо; т. е. так, чтобы
с = Фф)^. F)
Когда мы подставим F) в уравнение D), мы получим заключение следующей теоремы.
Пусть Ф(^) — фундаментальная матрица однородной линейной системы х' = Ах. Тогда
[единственное] решение задачи Коши (задачи с начальными условиями)
> х' = Ах, х@)=х0 G)
дает равенство
> x(t) = ФфФ^Г1^. (8)
А
В разделе 5.2 мы узнали, как найти фундаментальную матрицу решений для системы
> х' = Ах (9)
484 Глава 5. Линейные системы дифференциальных уравнений
с постоянной матрицей А коэффициентов размера п х п, по крайней мере в случае, когда
у матрицы А существует полная система п линейно независимых собственных векторов vi,
^2, • • •, vn, соответствующая [не обязательно различным] собственным значениям Аь Аг,
..., Ап соответственно. В этом случае соответствующие векторы решения уравнения (9)
даются формулой
Xi(t) =VieXit
для г = 1,2,..., п. Поэтому матрица размера п х п
*(<) =
vie
Ait
v2e
Mt
vne
\nt
A0)
векторы-столбцы которой являются решениями xi, Х2,..., хп, как раз и есть
фундаментальная матрица системы х' = Ах.
Чтобы применить равенство (8), нужно вычислить обратную матрицу Ф @) ~г. Матрица,
обратная к несингулярной (неособой) матрице размера 2x2
есть матрица
А =
А = 4
а Ъ
с d
d
—с
)
-ь
а
A1)
где Д = det(A) = ad — be ф 0. Матрица, обратная к несингулярной (неособой) матрице
А = [a,ij] размера 3 х 3, может быть вычислена по формуле
A = -f
+Аг1 -А12 +А13
—А21 +A22 —-^23
+А31 -А32 +^33
A2)
где Д = det(A) ф ОиА^ обозначает детерминант подматрицы (матрицы А) размера 2 х 2,
получающейся вычеркиванием г-й строки и j-ro столбца матрицы А. (Обратите внимание
на операцию транспонирования (символ Т) в формуле A2).) Формулу A2) можно
обобщить также и для матрицы размера п х п, но на практике обратные к большим матрицам
обычно вычисляются не по этой формуле, а методами приведения матрицы к треугольной
форме с помощью выполнения элементарных преобразований строк (алгоритм приводится
в любом учебнике линейной алгебры) иди с помощью системы компьютерной алгебры или
калькулятора.
Пример 1
Найдем фундаментальную матрицу для системы
х' = 4х + 2у,
у' = Зх - у,
A3)
а затем с ее помощью найдем решение системы A3), которое
удовлетворяет начальным условиям х@) = 1,2/@) = —1.
5.5. Экспоненциальная функция от матрицы и линейные системы 485
Решение Линейно независимые решения
-it
xi(t) =
е
3et
и x2(t) =
2e5t
найденные в примере 1 из раздела 5.2, приводят к фундаментальной
матрице
Тогда
*(*) =
Ф@)
е-2*
-Зе-2*
1
-3
2е5*'
и формула A1) дает обратную матрицу
Ф(О)-1
Следовательно, формула (8) дает решение
х(«) =
е~- 2ет
J>t
-%
-2t
3e~2t e
e-2t 2e5t
-Зе-2*
0)
5t
1 -2
3 1
3
а, значит,
x(*)=7
3e-2t + 4e5t
-9e-2* + 2e5t
A4)
A5)
Таким образом, решение первоначальной задачи Коши (задачи с
начальными условиями) выражается формулой
*(*) = f в' + |е5',
y(t)
«е-2* + |e5t.
Замечание. Преимущество применения фундаментальной матрицы состоит в
следующем. Как только мы знаем фундаментальную матрицу Ф (t) и обратную матрицу Ф @) ~*, мы
можем легко вычислить с помощью умножения матриц решения, удовлетворяющие
различным начальным условиям. Предположим, например, что мы ищем решение системы A3),
удовлетворяющее новым начальным условиям х@) = 77, у@) = 49. Тогда, подставляя A4)
и A5) в (8), получаем новое частное решение
*(*) = у
1
7
1
7
" е-2*
-3e-2t
" е-2'
-3e-2t
2е5*'
е5'
2е5*"
'1 -
3
"-21"
280
2'
1
7"
49
Г-з
1 9
=
e~2t + 80е5'
е-2' + 40е5'
486 Глава 5. Линейные системы дифференциальных уравнений
Экспоненты матриц
Мы теперь обсудим возможность построения фундаментальной матрицы для линейной
системы с постоянными коэффициентами х' = Ах непосредственно с помощью матрицы А
коэффициентов, т. е. без предварительного применения описанных в предыдущих разделах
методов нахождения ливейнр независимой системы векторов-решений.
Мы видели, что экспоненциальные функции играют центральную роль в решении
линейных дифференциальных уравнений и систем, начиная от скалярного уравнения х' — кх
с решением x{t) = ,xoekt до решения-вектора х(£) = veA* линейной системы х' = Ах,
матрица А коэффициентов которой имеет собственное значение Л, которому
соответствует собственный вектор v. Теперь мы определим экспоненциальные функции матриц таким
способом, что
X(t) = eAt
будет матричным решением матричного дифференциального уравнения
Х' = АХ
с матрицей А (размера п х п), составленной из коэффициентов.
Экспоненциальная функция ez комплексного числа z может быть определена (как в
разделе 3.3) с помощью экспоненциального рядй
z2 zz
е* = 1 + ,+ _ + _ + ,
z,b
■ + -Т + -
n!
(i6)
Точно так же, если А — матрица размера пхп,то экспонента матрицы еА — матрица
размера пх п9 определенная рядом О
А2
sa = I + a+_ + .
Ап
. + —+ ••■
A7)
где I — единичная матрица. Значение бесконечного рада в правой части равенства A7)
выражается формулой
£^г= lim V^V
A8)
где А0 = I, А2 = АА, А3 = АА2ит. д. Таким образом,если п ^ 0,то An+1 определяется
по индуктции с помощью равенства An+1 = АА". Можно показать, что предел в
формуле A8) существует для каждой квадратной матрицы А размера п х п* Иными словами,
экспонента матрицы еА определена (равенством A7)) для каждой квадратной матрицы А.
Пример 2
Рассмотрим диагональную матрицу размера 2 х 2
А -
Тогда очевидно, что
а 0
0 Ь
Хп =
о
о
ьп
5.5. Экспоненциальная функция от матрицы и линейные системы 487
для каждого целого числа п ^ 1. Отсюда следует, что
=1+А+-
1 0
0 1
+
а 0
0 Ъ
+
1 + а + а2/2! +
О
а2/2! О
О Ь2/2\
6
1 + 6 + 62/2! + ,
+
Таким образом,
О
так что значение экспоненциальной функции от диагональной матрицы А
размера 2x2 получается просто возведением основания натурального
логарифма в степень, равную соответствующему диагональному элементу
матрицы А. ■
Аналогично тому, как был получен результат в примере 2 для диагональной матрицы
размера 2x2, можно тем же самым способом установить и аналогичный результат для
диагональных матриц размера пхп. Значение экспоненциальной функции от диагональной
матрицы размера пхп
D =
аг О
О а2
О О
О
О
A9)
равно диагональной матрице размера п х п
О
О О
о
о
B0)
получающейся возведением основания натурального логарифма в степень, равную
соответствующему диагональному элементу D.
Экспонента матрицы еА удовлетворяет большей части соотношений для экспоненты,
которые хорошо знакомы в случае экспоненты от скаляров. Например, если 0 — нулевая
матрица размера пхп, то уравнение A7) дает
е°=1,
A1)
единичную матрицу размера п х п. В задаче 31 мы просим вас показать, что для
перестановочных (коммутирующих) матриц размера пхп выполняется важный закон для суммы
показателей степеней:
если
АВ = ВА, то еА+в = еАев.
B2)
488 Глава 5. Линейные системы дифференциальных уравнений
В задаче 32 мы просим вас показать, что
(еАГ
B3)
В частности, матрица еА несингулярна (неособая) для каждой матрицы А размера п х п (это
напоминает утверждение о том, что ez Ф 0 для всех z). Это следует из утверждения (хорошо
известного из элементарной линейной алгебры) о том, что векторы-столбцы матрицы еА
всегда линейно независимы.
Если t—скалярная переменная, то подстановка At вместо А в равенствр A7) дает формулу
+2 +п
oAt
= I + Ai + Аг - + ••• + Ап — + ■
2!
П!
B4)
(Конечно, At получается просто умножением каждого элемента матрицы А на t.)
Пример 3
Если
то
А =
0 0 18]
0 0 0
0 0 0
ГО 3 4
0 0 6
[о о о_
>
и А3 =
'0 0 0
0 0 0
0 0 0
А2 =
так что А" = О для n ^ 3. Поэтому из уравнения B4) следует, что
eA' = I + At + |A2t2 =
1
0
0
0 0"
1 0
0 1
+
/
0
0
0
3
0
0
4"
6
0
'+*
0 0 18
0 0 0
0 0 0
t2;
иными словами, что
„At
1 Ы U + 9t2
0 1 6*
0 0 1
Замечание. Если Ап = 0 для некоторого положительного целого числа п, то
экспоненциальный ряд в B4) обрывается после конечного числа членов, так что экспонента матрицы
еА (или eAt) легко вычисляется (как в примере 3). Такая матрица (т. е. матрица, некоторая
степень которой обращается в нуль) называется нильпотентной. ■
Пример 4
Если
то
А =
А =
2
0
0
0
2
0
0"
0
2
+
2 3 4
0 2 6
0 0 2
0 3 4
0 0 6
0 0 0
= D + B,
5.5. Экспоненциальная функция от матрицы и линейные системы 489
где D = 21 — диагональная матрица и В — нильпотентная матрица из
примера 3. Поэтому из формул B0) и B2) следует, что
1 Zt 4t + 9t2
0 1 6*
0 0 1
eAt = e(D+B)t = eDte
т _
таким образом,
eAt =
"е2*
0
0
"е2<
0
0
3*е2<
е2<
0
0 0 '
е2< 0
0 е2*_
Dt + 9t2)e
6te2t
e2t
Построение решения с помощью экспоненциальной функции
от матриц
Оказывается, что допустимо почленное дифференцирование ряда B4), в результате чего
получается
dt
иными словами,
(е**) = A + Aai + A3£ + ..- = A (l + At + А2^+ •••);
|(е")=Ае",
B5)
по аналогии с формулой Dt (ekt) = kekt, известной из элементарного курса анализа. Таким
образом, матричная (матричнозначная) функция
> X(t) = eAt
удовлетворяет матричному дифференциальному уравнению
> X' = АХ.
Поскольку матрица eAt несингулярная (неособая), то экспоненциальная функция от этой
матрицы eAt представляет собой фундаментальную матрицу линейной системы х' =
= Ах. В частности, именно эта фундаментальная матрица Х(£) удовлетворяет условию
Х@) = I. Поэтому из теоремы 1 вытекает следующий результат.
Теорема 2
Построение решения с помощью экспоненциальной
функции от матриц
Если А—матрица размера п х п, то решение задачи Коши (задачи с начальными условиями)
> х/ = Ах, х@) = хо B6)
дает формула
х(£) = eAtx0,
B7)
и это решение единственно.
490 Глава 5. Линейные системы дифференциальных уравнений
Таким образом, решение однородных линейных систем приводит к задаче вычисления t
экспонент от матриц. Наоборот, если мы уже знаем фундаментальную матрицу Ф(£)
линейной системы х' = Ах, то, поскольку eAt = Ф(£)С (в соответствии с уравнением D4'))
ие
АО __ Л) _
е° = I (единичной матрице), получаем
еА* = Ф(^)Ф@)-1.
B8)
Так что мы можем найти экспоненциальную функцию от матрицы е - , зная решение
линейной системы х
Ах.
Пример 5
В примере 1 мы нашли, что система х' = Ах при
А =
имеет фундаментальную матрицу
Ф(«) =
e-2t 2e5t
-Зе
-2t
D5t
где Ф@)
-1 _ I
"" 7
Следовательно, уравнение B8) дает
pAt _ 1
_ 1
— 7
-Зе
0-2t
-2t
2еы
0ы
-2t
+ 6eJ
5t
Зе"л + Зе
5t
1 -2
3 1
-2e~2t + 2eJ
бе* + e5t
,5t
Пример 6
Используя экспоненту от матрицы, решим задачу Коши (задачу с
начальными условиями)
X =
2 3 4
0 2 6
0 0 2
х@) =
19
29
39
B9)
Решение Матрица А коэффициентов в уравнении B9), очевидно, имеет
характеристическое уравнение B — АK = 0 и, таким образом, тройное собственное
значение А = 2,2,2. Совершенно ясно, что уравнение собственного
вектора принимает вид
(А - 2I)v =
и потому имеет (с точностью до постоянного числового множителя)
единственное решение v = [ 1 0 0 ] . Таким образом, есть только один14
0 3 4"
0 0 6
0 0 0
а
Ь
с
=
1
0
0
*4 С точностью до постоянного числового множителя. — Примеч. ред.
5.5. Экспоненциальная функция от матрицы и линейные системы 491
собственный вектор, соответствующий собственному значению А = 2.
Значит, мы все еще не имеем трех линейно независимых решений, необ*
ходимых для построения фундаментальной матрицы. Но мы обращаем
внимание, что А—та самая матрица, экспоненциальная функция от
которой
„At
e2t;
О
О
Ые2Ь
О
D* + 9t2)e2t
Me2*
была вычислена в примере 4. Следовательно, используя теорему 2,
решение задачи Коши (задачи с начальными условиями) B9) определил* по
формуле
x(t) = еА?х@) *=
e2t Zte2t D* + 9t2)es
it'
0 e2t . Me2t
0 0 e2<
A9 + 243* + 351i2)e2t'
B9 + 234t)e2*
39e2t
9
29
39
Экспоненциальная функция от матрицы общего вида
Относительно простое вычисление значения е*', выполненное в примере 4 (и
использованное в примере 6), базировалось на том факте, что если
А =
2 3 4
0 2 6
0 0 2
то матрица А — 21 нильпотентна:
(А-21K =
0 3 4'
0 0 6
0 0 0
3 |
=
0 0 0
0 0 0
0 0 0
= 0.
C0)
Подобный результат справедлив для любой матрицы А размера 3 х 3, имеющей тройное
собственное значение г, если ее характеристическое уравнение имеет вид (А — гK = 0. Для
экспоненты такой матрицы можно провести явное вычисление, подобное тому, что сделано
в равенствах C0). Такое вычисление покажет, что
(А - rlK = 0.
C1)
(Этот конкретный результат—частный случай теоремы Гамильтона-Кэли, известной из
расширенного курса линейной алгебры. Согласно теореме f амйльтона-Кэли, каждая, матрица
492 Глава 5. Линейные системы дифференциальных уравнений
является корнем ее собственного характеристического уравнения.) Таким образом, матрица
А — rl нильпотентна, и из этого следует, что
eAt = e(rI+A-rI)t = erlt . e(A-rI)t = еПг . [I + (А - rl)t + |(А - Tift2]
C2)
причем экспоненциальный ряд здесь обрывается, так как справедливо равенство C1). Этим
способом мы можем довольно легко вычислить экспоненциальную функцию от любой
квадратной матрицы еА*, если эта матрица имеет только одно собственное значение.
Вычисления, подобные записанным в равенствах C2), позволяют разработать метод
вычисления eAt для любой матрицы А размера п х п. Как мы видели в разделе 5.4, А
имеет п линейно независимых обобщенных собственных векторов ui, 112,..., un. Каждый
обобщенный собственный вектор и соответствует собственному значению Л матрицы А
и имеет ранг г ^ 1, такой что
(А - AI)ru = О,
но
(А - Му-Ы ф О.
C3)
(Если г = 1, то и — обыкновенный собственный векторе такой что Аи = Ли.)
Даже если мы еще не вычислили eAt явно, мы можем рассмотреть функцию х(£) =
_ „At
eAt и, которая является линейной комбинацией векторов-столбцов матрицы еAt и поэтому
представляет собой решение линейной системы х' = Ах при условии, что х@)
Действительно, мы можем выразить х явно через А, и, Л и г:
и.
x(t) = eAtU = e(*I+A-AI)tu = eAIte(A-AI)i
u
так что
extI
x(t)
I + (A - XI)t + ... + (A - AI)^1
(r-1)!
„At
u + (A - \I)ut + (A - AIJu- +
+ •
+
u,
+ (A - AI)r
j.r—1
U
(r-1)! J
C4)
Alt
oAti
Здесь мы использовали формулу C3) и то, что е
Еслилинейнонезависимыерешениях1(£),Х2(£),... ,xn(t) системы х' = Ах вычислены
по формуле C4) для линейно независимых обобщенных собственных векторов ui, U2,...,
un, то матрица размера п х п
Ф(*)=[х1(*) x2(t) ••• Xn(t)]
C5)
является фундаментальной матрицей системы х' = Ах. Наконец, конкретная
фундаментальная матрица Х(£) = Ф(£)Ф@)-1 удовлетворяет начальному условию Х@) = I, и,
таким образом, она и представляет собой искомое значение экспоненциальной функции от
матрицы, т. е. eAt. Таким образом, мы нашли доказательство следующей теоремы.
Теорема 3
Вычисление матрицы eAf
Пусть щ, U2, ..., un — это п линейно независимых обобщенных собственных векторов
матрицыАразмерапхп.Длякаждогог, 1 ^ г ^ п, пусть Xi(t)—решение системы х' = Ах,
5.5. Экспоненциальная функция от матрицы и линейные системы 493
даваемое формулой C4), в которую подставлено и = и^, соответствующее собственное
значение Л и ранг г обобщенного собственного вектора и^. Если фундаментальная матрица
Ф(£) определена формулой C5), то
еА* = ф(^)Ф@)-1.
C6)
Пример 7
Найдем еА', если
А =
г3
0
[0
4
5
0
51
4
3
C7)
Решение Теорему 3 можно применить даже в том случае, если матрица А не
является верхней треугольной. Но поскольку в данном случае матрица А
является верхней треугольной, мы можем сразу написать ее
характеристическое уравнение:
E-А)C-АJ = 0.
Таким образом, матрица А имеет простое собственное значение Ai = 5
и кратное собственное значение А2 = 3.
2
0
0
4
0
0
5"
4
-2
а
Ь
с
=
1
0
°J
Случай 1: Ai = 5. Уравнение собственного вектора (А — AI)u = 0
для и = [ а Ь с ] принимает вид
(А - 5I)u =
Последние два скалярных уравнения 4с = 0 и —2с = 0 дают с = 0.
Тогда первое уравнение — 2а + 46 = 1 удовлетворяется при а = 2 и 6 = 1.
Таким образом, собственное значение Ai = 5 имеет (обыкновенный)
собственный вектор Ui = [2 1 О] .Соответствующее решение системы
х' = Ах определяется по формуле
xi (t) = e5tui = еы [ 2 1 0 ]Т . C8)
Случай 2: А2 = 3. Уравнение собственного вектора (А — AI)u = 0
для и = [ а Ь с ] принимает вид
(А ^ 3I)U :
Из первых двух уравнений 46 + 5с = 0 и 26 4- 4с = 0 следует, что 6 =
= с = 0, но а можно выбирать произвольно. Таким образом, собственное
ГЬ 4 5"
0 2 4
[о о о
а
Ь
с
=
1
0
0J
494 ГпавшЖ Пинеинмштеистемы дисрференциальных уравнений
значШИ^2 = 3 имеет единственный15 (обыкновенный) собственный
аШШр иг = [ 1 0 0 ] . Соответствующее решение системы х' = Ах
определяется по формуле
x2(i)
: e3tu2
e3t[l 0 О]5
Чтобы найти обобщенный собственный вектор ранга г
ряющий уравнению C3), мы рассматриваем уравнение
C9)
2, удовлбтво-
(А - 3IJu =
6"
8
0
a
b
с
=
"Ol
0
oj
Первые два уравнения 86 -f 16c = 0 и АЬ + 8с = 0 удовлетворяются
при 6 = 2 и с = — 1, но а можно выбрать произвольно. При a = О мы
получаем обобщенный собственный вектор из = [0 2 —1] ранга
г = 2, соответствующий собственному значению А = 3. Поскольку (А —
— 3IJu = О, из равенства C4) находим третье решение
хз(*) = е3*[из + (А-31I1з*]
= е
м
0
2
1
+
0 4 5
0 2 4
0 0 0
0
2
-1
\
t )= e3t
/
Zt
2
-1
D0)
Зная решения, приведенные в равенствах C9) и D0),
фундаментальную матрицу
Ф(*)=[х1(«) ха(«) хз(«)]
можно определить по формуле C5):
е3' 3te3'
0 2e3t
0 -e3t
*(*) =
2е5*
0
причем Ф@) =
1 2
-2 -4
0 -1
Следовательно, по теореме 3, наконец, получаем
eAt = Ф(*)Ф@)-1 =
>2ebt e3t 3te3t'
e5t o 2e3t
j_ 0 0 -e3t_
" e3t 2e5t - 2e3t
0 e5t
0 0
4
'0
1
0
e5t-
1- 2"
-2 -4.
0 -1_
- D + Zt)e
2e5t - 2e
e
=
3t 1
3t
zt
Замечание. Как и в примере 7, теорема 3 позволяет вычислить eAt при условии, что
известен базис, состоящий из обобщенных собственных векторов матрицы А. Кроме того,
может использоваться система компьютерной алгебры так, как указано в приложении к этому
разделу. ■
С точностью до постоянного числового множителя. — Примеч. ред.
5.5. Экспоненциальная функция от матрицы и линейные системы 495
5.5» Задачи
В задачах 1-8 найдите фундаментальную матрицу каждой из систем, а затем примените
уравнение (8), чтобы найти решение, удовлетворяющее данным начальным условиям.
1. х' =
х@) =
3. X':
х@) =
х,
[Л]
! -5]
5-,х' =
х@) =
7. х' =
С
-3 -
9
1"
-1
> (
-2"
3
х,
) -61
2 -1 -2
J
[ -:
1
-4_
х,
х@) =
г. х' =
v x(d)
4, х' =
х@)
6. х7 =
хF) =
8. х' =
х@)
х,
2 -1
4 ? 2
= ■ 2^1
-IJ
3 -1
1 1
1
О
7 -5
4 3
2"
О
3 2 2
5 -4 -2
5 5 3
1
О
-1
х,
х,
х,
Вычислите экспоненциальную функцию от матрицы eAt для каждой системы х' = Ах, данной
в задачах 9-20.
9. х'\ =с Ъх\ — 4хг, х2 = 2х\ — х2
11. Х\ = 5xi — 3X2, Х2 = 2^1
13. Х\ = 9xi — 8#2» Х2 = 6X1 "~ 5X2
15. х[ = 6xi — 10x2, х2 = 2xi — 3x2
17. х[ = 3X1 -f X2, Х2 = Xi -f 3X2
19. xi = 9xi + 2x2, х2 = 2xi 4-6x2
ХО. х[ =; 6xi — 6x2, x2 =?= 4xi — 4x2
12. xi = 5xi — 4x2, x2 = 3xi — 2x2
14. a/i = 10xi — 6x2, x2 = 12xi — 7хг
16. Xi = llXi — 15X2, X2 = 6xi — 8X2
18. xi = 4xi + 2x2, x2 = 2xi + 4x2
20. xi = I3xi 4- 4x2, x'2 = 4xi + 7x2
В задачах 21-24 покажите, что матрица А нильпотентна, а затем используйте этот факт,
чтобы найти (как в примере 3) экспоненциальную функцию eAt от этой матрицы.
21. А =
23. А =
'1
1
'1
1
0
-1
-1
-1
-1
0
-1]
1
oj
22. А =
24. Д =
6
-9
3
5
3
4"
-6
0 -3]
0 7
0
-3J
В задачах 25-30 каждая матрица А коэффициентов представляет собой сумму нильпотентной
матрицы и единичной матрицы, умноженной на некоторое число. Используйте этот факт (как
в примере 6), чтобы решить данную задачу Кощи (задачу с начальными условиями).
25. х' =
х@) =
2 5
0 2
4
7
26. х7 =
х@).=
О
7
5
-10
496 Глава 5. Линейные системы дифференциальных уравнений
27.
х' =
'1
2
з]
0 1 2
0 0 1 |
х@) =
'4"
5
6
28.
х' =
5
0 0]
10 5 0
20 30 5 1
х@) =
0"
50
60
29.
30.
х@) =
х@) =
3 0
6 3
9 6
12 9
1"
1
1
1
0
0
3
6
0
0
0
3
х,
31. Предположим, что матрицы А и В размера пхп перестановочны (коммутируют); т. е. что АВ =
= В А. Докажите, что еА+в = еАев. (Указание. Сгруппируйте слагаемые в произведении двух
рядов в правой части так, чтобы получить ряд слева.)
32. Выведите из результата задачи 31, что для каждой квадратной матрицы А матрица еА является
несингулярной (неособой), причем (еА)~ = е_А.
33. Предположим, что
~0 1
А =
I и что A2n+1
1 0
А, если п ■
положительное целое число. Заключите
Покажите, что А2п
отсюда, что
eAt = Ich£ + Ash£,
и примените этот факт, чтобы найти общее решение системы х' = Ах. Проверьте, что
полученное решение эквивалентно общему решению, найденному методом собственных значений.
34. Предположим, что
0 2^
u -2 0
Покажите, что eAt = Icos2t + |Asin2t. Примените этот факт, чтобы найти общее решение
системы х' = Ах, и проверить, что полученное решение эквивалентно решению, найденному
методом собственных значений.
В задачах 35-40 примените теорему 3, чтобы вычислить экспоненциальную функцию от матрицы
еА* для каждой из данных матриц.
А =
35. А:
37. А =
39. А =
3 4
0 3
2 3 4
0 1 3
0 0 1
13 3 3
0 13 3
0 0 2 3
0 0 0 2
36. А =
38. А =
40. А =
1 2 3
0 1 4
0 0 1
5 20 30
0 10 20
0 0 5
2 4 4 4
0 2 4 4
0 0 2 4
0 0 0 3
5.5. Экспоненциальная функция от матрицы и линейные системы 497
5.5. Приложение. Автоматизация поиска решения
с помощью экспоненциальной функции от
матрицы
Если задана матрица А размера п х п, то с помощью системы компьютерной алгебры можно
сначала вычислить фундаментальную матрицу eAt системы х' = Ах, а потом вычислить
матричное произведение х(£) = еА*хо, чтобы получить решение, удовлетворяющее
начальному условию х@) = хо. Предположим, например, что мы хотим решить задачу Коши
(задачу с начальными условиями)
х\ = 13xi +4^2,
х'2 = 4xi + 7x2;
xi@) = ll, х2@)=23.
После ввода матриц
11]
23 J
команда системы Maple
with(linalg): exponential(A*t)
команда системы Mathematica
MatrixExp[A t]
или команда системы Matlab
syms t, expm(A*t)
вычисляет экспоненциальную функцию от матрицы:
_ г Г еы + 4е15* -2е5* + 2е15* 1
expAt = ъ ^ _^ы + &1И ^ы + в1И J .
Затем любая из следующих команд (multiply (expAt, хО) в случае Maple, expAt. xO
в случае Mathematica и expAt*xO в случае Matlab) находит произведение и дает вектор
решения
_ Г -7е5* + 18e15* 1
Х ~~ [ 14e5t + 9e15t J '
Очевидно, это, наконец, и есть самый простой способ решения задачи!
В качестве примера трехмерной задачи решите задачу Коши (задачу с начальными
условиями)
х[ — —149xi — 50х2 — 154х3,
xf2 = 537xi + 180х2 + 546х3,
Xg = —27xi — 9x2 — 25хз;
xi @) = 17, х2@) = 43, х3@) = 79.
А =
13 4
4 7
хо =
498 Глава 5. Линейные шстемы дифференциальных уравнений
И вот—четырехмерная задача:
х[ = 4xi + Х2 -I- х3 + 7х4,
#3 ~ ч Х1 ■+ДРЖ2 + 4#3 + #4>
^ {Х4 = 7xi + '°;ia?2 + Хз+'4х4;
xi @) = 15, х2@) = 35, х3@) = 55, х4@) = 75,
Если вам понравилась экспоненциальная функция от матрицы, составьте несколько
собственных задач. Выберите, например, любую однородную линейную систему из этой главы
и поэксперименте с различными начальными условиями. Экзотическая матрица А размера
5 х 5 из приложения к разделу 5.4 может предложить некоторые интересные возможности.
5.6. Неоднородные линейные системы
В разделе 3.5 мы показали два метода нахождения частного решения одного неоднородного
линейного дифференциального уравнения n-го порядка: метод неопределенных
коэффициентов и метод вариации параметров. Каждый из них может быть обобщен для неоднородных
линейных систем. При моделировании физической ситуации с помощью линейных систем
неоднородные члены обычно соответствуют внешним влияниям, таким как приток
жидкости в каскад рассольных баков или внешние силы, действующие на систему, состоящую из
тела заданной массы, закрепленного на пружине.
Предположим, мы имеем неоднородную линейную систему первого порядка
> x' = Ax + f(t), A)
где А—постоянная матрица размера пхпи "неоднородный член" f (t) —данная непрерывная
векторнозначная функция. Тогда по теореме 4 из раздела 5.1 общее решение уравнения A)
имеет форму
> x(«) = xc(t) + xp(t), B)
гДе
• хс(£) = ciXi(t)+C2X2(t)H Hcnxn(t)— общее решение соответствующей однородной
системы х' = Ах, и
• хр (t) — какое-нибудь частное решение первоначальной неоднородной системы A).
В предыдущих разделах мы научились находить хс(£), так что теперь наша задача состоит
в том, чтобы научиться находить хр (t).
Метод неопределенных коэффициентов
Сначала мы предположим, что неоднородный'член f (t) в уравнении A) представляет собой
линейную комбинацию (с постоянными коэффициентами-векторами) произведений мно*
гочленов,? экспоненциальных функций, синусов и косинусов. Тогда метод неопределенных
5.6. Неоднородные линейные системы 499
коэффициентов для систем, по сути, имеет тот же самый вид, что и для одного линейного
дифференциального уравнения. Мы сначала пытаемся угадать общую форму частного
решения хр, а затем пытаемся определить коэффициенты хр подстановкой его в уравнение A).
Кроме того, эта общая форма выбирается по существу точно так же, как и в случае
единственного уравнения (этот выбор обсуждался в разделе 3.5); все отличие состоит только в том,
что используются неопределенные коэффициенты-векторы, а не неопределенные скаляры.
Мы поэтому ограничим данное обсуждение иллюстративными примерами.
Пример 1
Найдем частное решение неоднородной системы
х +
3 2
7 5
3
2*
C)
Решение Неоднородный член f = [ 3 2t ] является линейным, так что разумно
выбрать линейное пробное частное решение в виде
«1
CL2
t +
Ъ2
Хр(^) = at + b =
После замены х = хр в уравнении C) мы получаем
+
D)
а>1
а2
3 2
7 5
CLit + &i
a2t + b2
3
2t
3ai + 2a2
7oi + 5a2 + 2
t +
3bi + 2b2 + 3
7bi + ЪЬ2
Мы приравниваем коэффициенты при t и постоянныехлагаемые в обоих
компонентах (в х\ и в х2) и таким образом получаем уравнения
3ai + 2а2 = О,
7oi + 5a2 + 2 = О,
76i -f 562 = ci2.
E)
Мы решаем первые два уравнения системы E) и находим а\ = 4 и а2 =
= —6. Подставляя эти значения, мы можем затем решить последние два
уравнения системы E) и найти Ь\ = 17 и Ь2 = —25. Подстановка этих
коэффициентов в уравнение D) дает частное решение х = [ х\ х2 ] ,
которое в скалярной форме можно записать так:
xi(t)= 4t + 17,
x2(t) =-6t - 25. Ш
Пример 2
На рис. 5.6.1 показана система, состоящая из трех рассольных баков,
изученная в примере 2 раздела 5.2. Объемы трех баков равны V\ = 20,
500
Глава 5. Линейные системы дифференциальных уравнений
Рис. 5.6.1. Три
рассольных бака из примера 2
V2 = 40 и Уз = 50 (галлонов), причем общий (суммарный) расход равен
г = 10 (галлонов в минуту). Предположим, что все три бака
первоначально содержат пресную воду, но в бак 1 вливается рассол, содержащий
2 фунта соли в галлоне, так что бак 1 в минуту вливается 20 фунтов
растворенной соли. Из уравнения A8) раздела 5.2 следует, что вектор
х(£) = [xi(t) x2(t) xs(t)] количеств соли (в фунтах) в трех баках
в момент времени t удовлетворяет неоднородной задаче Коши (задаче
с начальными условиями)
dx
It
0,5
0,5
0
0
-0,25
0,25
0
0
-0,2
х +
20
0
0
, х@) =
0
0
0
F)
Неоднородный член f = [20 0 0] здесь соответствует притоку соли
20 фунтов в минуту в бак 1, при отсутствии (внешнего) притока соли
в баки 2 и 3.
Поскольку неоднородный член представляет собой константу, мы,
естественно, выбираем постоянную пробную функцию
Хр = [ ai а2 as] ,
для которой Хр = О. Тогда подстановка х = хр в F) дает систему
0
0
0
=
-0,5
0,5
0
0
-0,25
0,25
0
0
-0,2
ai
ai
-°3.
+
20
0
0
которая легко решается, и мы находим по очереди а\ = 40, а2 = 80
и аз = 100. Таким образом, наше частное решение имеет вид хр(£) =
= [40 80 Л00]Т.
5.6. Неоднородные линейные системы 501
В примере 2 из раздела 5.2 мы нашли общее решение
хс(£) = сг
3
6
5
е-*/2 + с2
0
1
-5
е-*/4 + с3
0
0
1
-t/ъ
соответствующей однородной системы, так что общее решение х = хс +
+ хр неоднородной системы F) дает формула
x(t) = а
3
-6
5
е-*/2 + с2
0
1
-5
е-*/4 + с3
0
0
1
е-*/5 +
40
80
100
G)
Подставив нулевые начальные условия в систему F), мы получим
скалярные уравнения
3ci + 40 = 0,
-6ci + с2 + 80 = 0,
5ci - 5с2 + с3 + 100 = 0,
которые легко решаются, и мы найдем ci = —Щ-.С2 = —160исз = — ^?р.
Подставляя эти коэффициенты в уравнение G), находим, что количества
соли в трех баках в момент времени t даются формулами
Xl(t) =40-40e"t/2,
X2(t) = 80 + 80e"t/2 - 160e"t/4, (8)
Xs(t) = 100 + Ш (-2е"^2 + 24е"*/4 - 25e"^5) .
Как видно из рис. 5.6.2, соль в баках распределяется так, чтобы при
t —> +оо установилась однородная концентрация 2 фунта на галлон —
та же самая концентрация соли, что и во вливаемом рассоле в бак 1. ■
В случае, если возникают подобные слагаемые в общем решении однородного уравнения
и неоднородных членах, есть одно отличие между методом неопределенных
коэффициентов для систем и методом неопределенных коэффициентов для одного уравнения (правило 2
в разделе 3.5). В случае системы обычно первое выбираемое пробное решение нужно
умножить не только на наименьшую целую степень t, такую чтобы устранить подобные, но также
и на все более низкие (неотрицательные целые) степени t, причем все полученные таким
образом слагаемые должны быть включены в пробное решение.
Пример 3
Рассмотрим неоднородную систему
4
3
15
4
te
-2t
(9)
502 Глава 5. Линейные системы дифференциальных уравнений
'0 10 20 30 40 50 60
t
Рис. 5.6,2. Интегральные
кривые (графики количеств соли),
определенные равенствами (8)
В примере 1 раздела 5.2 мы нашли решение
xc(i)
ci
е-2' + с2
o5t
A0)
соответствующей однородной системы. В первоначально
сконструированном пробном решении хр(£) = ate"**2* -f be~2t есть слагаемые,
подобные слагаемым в общем решении однородного уравнения, заданном
формулой A0). Поэтому пришлось бы выбрать
xp(t)
:а*2е-2* + Ые-2* + се*
в качестве пробного решения, и тогда нам пришлось бы определить шесть
скалярных коэффициентов. Более просто использовать метод вариации
параметров, рассматриваемый в следующем разделе. ■
Вариация параметров
В разделе 3.5 уже говорилось, что метод вариации параметров может быть применен к
линейному дифференциальному уравнению с переменными коэффициентами, причем его
применив не ограничено только неоднородными слагаемыми в виде многочленов, экспоненциаль*
ных и синусоидальных функций. Метод вариации параметров для систем имеет такую же
самую гибкость и краткую матричную формулировку, которая удобна и для практических
и теоретических целей.
Мы хотим найти частное решение хр неоднородной линейной системы
> { x' = P(*)x + f(£),
учитывая, что мы уже нашли общее решение
> Xc(t) = CiXi(t) + С2Х2(£) Н h CnXn(t)
соответствующей однородной системы
> х' = Р(*)х.
(И)
A2)
A3)
5.6. Неоднородные линейные системы 503
Мы сначала с помощью фундаментальной матрицы Ф(£), векторами-столбцами
которой служат xi, X2,..., хп, перепишем общее решение однородного уравнения, даваемое
формулой A2), в виде
хс(*) = Ф(*)с. A4)
Наша идея состоит в том, чтобы заменить векторный "параметр" с переменным вектором
u(t), и, таким образом, мы ищем частное решение в виде
> xp(t) = Ф(*)и(«). A5)
Мы должны определить u(t) так, чтобы хр и в самом деле удовлетворяло уравнению A1).
Производная хр(£) в соответствии с правилом дифференцирования произведения равна
х;ад = Ф,адии + Фади/ед. A6)
Следовательно, подстановка уравнений A5)иA6)вA1) дает
Ф'(*)и(*) + Ф(*)и'(«) = Р(*)Ф(*)и(*) + f (t). A7)
Но
ф'Ю^рюфю, (is)
потому что каждый вектор-столбец матрицы Ф(£) удовлетворяет уравнению A3). Поэтому
уравнение A7) приводит к
Ф(«)и'(«) = t(t). A9)
Таким образом, достаточно выбрать u(i) так, чтобдл
u'(t) = *(t)-4 (t); B0)
т. е. так, чтобы
u(t)= [фф-ЭДсй. B1)
Подставив B1) в A5), мы, наконец, получим искомое частное решение в том виде, который
предусмотрен в следующей теореме.
Теорема 1
ариация параметров
Если Ф(£) — фундаментальная матрица однородной системы х' = Р(£)х на некотором
интервале, где Р(£) и f (t) непрерывны,^ частное решение неоднородной системы
x' = P(t)x + f(t)
может быть определено по формуле
> xp(t) = Ф(*) f Фф-Ч(t) dt. B2)
504 Глава 5. Линейные системы дифференциальных уравнений
Это и есть нужная нам формула вариации параметров для линейной системы первого
порядка. Если мы сложим это частное решение и общее решение однородного уравнения,
даваемое формулой A4), мы получим общее решение
> x(t) = Ф(*)с + Ф(*) [фф-^фсй B3)
неоднородной системы A1).
Выбор постоянной интегрирования в уравнении B2) несуществен, поскольку нам нужно
только одно (произвольное) частное решение. При решении задач Коши (задач с
начальными условиями) часто удобно выбрать постоянную интегрирования так, чтобы хр(а) = О,
и, таким образом, интегрировать от а до t:
Хр(*) = Ф(*)[ Ф(з)-Ч(з)с1з. B4)
Ja
Если мы сложим частное решение неоднородной задачи
х' = P(t)x + f(t), х(а) ==0
в B4) с решением хс(£) = Ф(£)Ф(а)_1ха соответствующей однородной задачи х' = Р(£)х>
х(а) = ха, мы получим решение
x(t) = Ф(^)Ф(а)-1ха + Ф(*) [ Ф(8)-Ч(8) ds B5)
Ja
неоднородной задачи Коши (задачи с начальными условиями)
х' = P(t)x + f (t), x(a) = Ха. B6)
Уравнения B2) и B5) справедливы для любой фундаментальной матрицы Ф(£)
однородной системы х' = Р(£)х. В случае постоянного коэффициента Р(£) = А можно
использовать для Ф(£) экспоненту (матрицу eAt), т. е. частную фундаментальную матрицу, такую что
Ф@) = I. Тогда, поскольку (eAt)-1 = e~At, подстановка Ф(£) = eAt в B2) дает частное
решение
xp(£)=eAt le-Atf(t)dt B7)
неоднородной системы х' = P(£)x + f (£). Точно так же подстановка Ф(£) = eAt в
уравнение B5) при а = 0 дает решение
0Atv . ^At I ^-At
Г
Jo
> x(t) •= eAtx0 + eAt I e~Atf(t) dt B8)
задачи Коши (задачи с начальными условиями)
> x' = P(*)x + f(*), x@)=xo. B9)
Замечание. Если сохранить t в качестве независимой переменной, но использовать s
в качестве переменной интегрирования, то решения B7) и B8) могут быть записаны в виде
xp(t) = le-A(s-Vf(s)ds и x(t) = eA'x0 + [ е-^^ВДЛ. ■
5.6. Неоднородные линейные системы 505
Пример 4
Решим задачу Коши (задачу с начальными условиями)
te-2t, x@) =
4 , 2
3 -1
х —
15
4
C0)
Решение Решение соответствующей однородной системы дается формулой A0).
Она дает фундаментальную матрицу
*(*) =
е~- 2еъь
-2t
-3et
J>t
, причем Ф@) = \
Из равенства B8) раздела 5.5 следует, что экспоненциальная функция от
матрицы коэффициентов А из C0) будет иметь вид
eAt = Ф^)Ф(О) =
-2t
-3et
е-"> 2e5t
0ы
1 -2
3 1
e~2t + 6e5t -2e~2t + 2e5t
-3et + 3e5t 6e< + e5t
Тогда по формуле вариации параметров (равенство B8)) получим
e~Atx(t) = x0 + [ e~Asf(s) ds =
е-° + 6es -2e2s + 2е~
e2s
-3e2s + 3e~5s
5s
6e2s + e~5s
-15ses
-4ses
ds
ПН
—s — 14se~7s
3s- 7se-7s
ds =
7] ,[-4- 7t2+ 4e~7t + 28te~7t
3 + " -2 + 21t2 + 2e'n + Ute~7t
Следовательно,
e"A'x(*) = i
94- It2 + 4et + 2Ste~7t
40 + 21£2 + 2e~7t + Ше~7'
0At .
После умножения правой части на eAt мы находим, что решение задачи
Коши (задачи с начальными условиями), поставленной в C0),
определяется формулой
х(*) = \
a-2t.
+ 6e5t -2e~2t + 2e
35t
05t
_L
14
-3e~2t + 3e5t . 6e~2t + e
F + 28t - 7t2)et + 92e5'
(-4 + Ш + 21t2)et + 46e5t
14
94- It2 + 4e~7t + 28tet
40 + 21£2 + 2e~7' + Ше~7'
506 Глава 5. Линейные системы дифференциальных уравнений
5,6, Задачи
1. х'
3. х1
4. х
5. х'
7. х
8. х
9. х
11. х
12. х
2x + y-2t
В задачах 1-14 примените метод неопределенных коэффициентов, чтобы найти частное решение
каждой из данных систем. Если заданы начальные условия, найдите частное решение, которое
удовлетворяет этим условиям. Штрихи обозначают производные по \
х 4- 2у + 3, у' = 2х 4- у - 2 2. х' = 2х + Зу + 5, у'
= Зх 4- 4у, у' = Зх + 2у + t2; х@) = у@) = 0
= Ах 4- у + е', у' =*6х - у - е'; х@) = у@) = 1
6х - 1у + 10, у' = х - 2у - 2е~* 6. а/ = 9х 4- у + 2е\ у' = -8х
= -Зх -h 4y -h sin U у' = 6х - 5у; х@) = 1, у@) = 0
= х — Ъу 4- 2 sin £, у' = х — у — 3 cos £
= ж — 5у 4- cos 2t, yf = х — у 10. х' = х — 2у, у' = 2а; — у 4- е* sin t
= 2х 4- 4у 4- 2, у' = х + 2у 4- 3; х@) = 1, у@) = -1
= х 4- у 4- 2t, у' = х 4- у - 2£ 13. х' = 2х 4- у 4- 2е\ у' = х 4- 2у - Зе*
2у + tel
14. х' = 2х + у 4-1, у' = 4х 4- 2у 4- e4t
Задачи 15 и 16 подобны примеру 2, но в них рассматривается система из двух рассольных баков
(имеющих объемы Vi и V2 галлонов — см. рис. 5.6.2), а не из трех баков. Каждый бак первоначально
содержит пресную воду, причем в бак 1 вливается рассол со скоростью г галлонов в минуту,
имеющий концентрацию соли со фунтов на галлон, (а) Найдите количества xi(t) и x2(t) соли
в двух баках после t минут. (Ь) Найдите предельное (т.е. получающееся через длительное время)
количество соли в каждом баке, (с) Найдите, сколько времени потребуется для того, чтобы
в каждом баке концентрации соли достигла 1 фунта на галлон.
15. Vi = 100, V2 = 200, г = 10, со = 2
16. Vi = 200, V2 = 100, г = 10, со = 3
В задачах 17-34 используйте метод вариации параметров (и возможно, систему компьютерной
алгебры), чтобы решить задачу Коши (задачу с начальными условиями)
х' = Ах 4- f (£), х(а) = ха.
В каждой задаче мы приводим вычисленное с помощью системы компьютерной алгебры значение
экспоненциальной функции от матрицы eAt .
17. А:
6 -7
1 -2
Щ =
, х@) =
е ~ б
-е~* 4- 7e5t
-е~г + еы
60
90.
7е~* - 7e5t
7е-*-е5*
18. Снова решите задачу 17, но замените f (t) на
100t
-50*
19. А =
1 2
2 -2
pAt _ 1
е — 5
f(t) =
-3t+4e2t
180t
90
, x@) =
-2e"dt 4- 2e
2*
-2e-3*4-2e2t
4e '
st + e2t
20. Снова решите задачу 19, но замените f (t) на
21. А =
«At
4 -1
5 -2
■ *(*) =
18е
2*
ЗОе
2t
-е"* + be6t
-5е~* 4- 5е3*
,х@) =
t_est
5е"< - еа
75е2<
0
е — е
-t „3t
5*6, Неоднородные линейные системы 507
22. Снова решите задачу 21, но замените f (*) на
28е~*
20e3t
23. А =
3 -1
9 -3
,ОД
, х@) =
eAt =
1 + 3* -*
9* 1-3*
24. Снова решите задачу 23, но положите f (*) =
ихA) =
3
7
25. А =
2 -5
1 -2
.*(*) =
, х@)
eAt =
cos * + 2 sin * —5 sin *
sin * cos * — 2 sin *
26. Снова решите задачу 25, но замените f (*) =
27. А =
«At
2 -4
1 -2
,'(*) =
36Г
6*
,х@)
—
"
0
4 cos *
6 sin*
'
и х@) =
1 + 2* -4*
* 1-2*
18. Снова решите задачу 27, но замените f (*)
29. А =
30. А =
«At
31. А =
eAt =
Щ. А =
cos*
sin*
0 -2
2 0
— sin*
cos*
, f(*) =
sec*
0
, x@) =
41n*
ихA)-
1
-1
* cos 2*
* sin 2*
cos 2* — sin 2*
sin 2* cos 2* ^
12 3] Г 0
0 12, f (*) = 0
0 0 lj [6e*
e* 2*e* C* + 2*2)e*
0 e* 2*e*
0 n -*
,x@)
, x@) =
e
0
1 3 4"
0 1 3
0 0 2
,ОД
0
0
2e2t
,x@) =
e* 3*e* (-13-9*)е' + 13е2*
0 e* . -3e* + 3e2*
0 0 e2t
Ь. A =
0 4 8 0
0 0 3 8
0 0 0 4
0 0 0 0
, f (*) = 30
,x@) =
508 Глава 5. Линейные системы дифференциальных уравнений
pAt
е —
0
0
0
At
i—l
0
0
8* + 6t2
3t
1
0
32t2 + 8t3
St + 6t2
At
1
34. A
eAt =
0 4 8 0]
0 0 0 8
0 0 2 4
0 0 0 2
. m =
г о"
0
[e2tJ
,x@) =
1
2
2
lj
1 4t 4(-l + e2t) 16*(-l + e2t)
0 1 0 4(-l + e2t)
0 0 e2t
0 0 0
Ate"
«2t
5.6. Приложение. Автоматизированная вариация
параметров
Приложение формулы вариации параметров к уравнению B8) позволяет автоматизировать
процесс решения настолько, что можно воспользоваться системой компьютерной алгебры.
Следующие команды системы Mathematica позволяют проверить результаты, полученные
в примере 4 этого раздела:
А = {{4,2}, {3,-1}};
х0 ={{7}, {3}};
f[t_] := {{-15 t Exp[-2t]},{-4 t Exp[-2t]}};
exp[A ] := MatrixExp[A]
x = exp[A*t].(x0 + Integrate[exp[-A*s] .f [s], {s,0,t}])
Команды, позволяющие вычислить экспоненциальную функцию от матрицы, которые были
приведены в приложении.к разделу 5.5, составляют основу для аналогичных вычислений
в системах Maple и Matlab. Так что вы можете легко проверить ответы к задачам 17-34 из
этого раздела.
V
~Т~
"
J&r-t i J ,i i \ j'THr
ГЛАВА
Нелинейные
системы
и явления
6.1. Устойчивость и фазовая плоскость
С
амые разнообразные природные явления могут быть смоделированы двумерными
системами первого порядка вида
!-*«.,).
&у_
dt
О)
G(x,y),
в которые независимая переменная t не входит явно. Такую систему называют автономной
системой. Благодаря отсутствию t в правых частях система A) не только выглядит более
просто, но гораздо проще анализировать ее решения и визуализировать их. Мы
предполагаем, что функции F и G непрерывно дифференцируемы в некоторой области R плоскости ху,
которую называют фазовой плоскостью системы A). Тогда, согласно теореме
существования и единственности, приведенной в приложении, для заданного to и любой точки (хо , у о)
области R существует единственное определенное на некотором открытом интервале (а, Ъ),
содержащем to, решение х = x(t), у = y(t) уравнения A) такое, которое удовлетворяет
начальным условиям
x(to) = xo, y(t0) = уо-
B)
В этом случае уравнения х = x(t), у = y(t) представляют собой параметрическое
задание интегральной кривой в фазовой плоскости. Любую такую интегральную кривую
называют траекторией системы A); точно одна траектория проходит через каждую точку
510 Глава 6. Нелинейные системы и явления
области R (задача 29). Точка равновесия1 системы A) — это точка (#*, у*), такая что
> F(a?*,tf*) = G(a?*,y*) = 0. C)
Если (#*, у*) —точкаравновесия системы, то функции-константы
з(*) = з*, y(t) = y* D)
удовлетворяют уравнениям A). Такое решение-константа называется равновесным
решением2 системы. Обратите внимание, что траектория равновесного решения D) состоит из
единственной (отдельной) точки (#*, у*).
В некоторых практических задачах именно эти очень простые решения и траектории как
раз и представляют собой самый большой интерес. Предположим, например, что система
х' = F(x, у), у' — G(x, у) моделирует две популяции животных численностью x(t) и y{t)9
которые живуют в той же самой среде, и, возможно, конкурируют за то же самое
продовольствие или охотятся друг на друга; x(t) пусть обозначает число кроликов, a y(t) число
белок в момент времени t. Тогда точка равновесия (х*, у*) системы определяет постоянную
численность х* популяции кроликов и постоянную численность у* популяции белок,
которые могут сосуществовать друг с другом в данной среде обитания. Если (хо, уо) не является
точкой равновесия системы, то популяции постоянных численностей xq кроликов и у о белок
сосуществовать не могут; одна или обе численности должны измениться со временем.
Пример 1
Найдем точки равновесия системы
dx Л А Л 2
— = 14ж — 2х — ху,
— = 16?/ - 2у2 - ху.
at
E)
Решение Точка равновесия (х, у) должна удовлетворять уравнениям
14х — 2х2 — ху = #A4 — 2х — у) = 0,
1бу - 2у2 - ху = 2/A6 - 2у - х) = 0,
из которых мы видим, что либо
х = 0 или 14 — 2х — у — 0, Fа)
1 Точки равновесия называют очень часто особыми точками. Кроме того, их называют также стационарными
точками, стационарными решениями, положениями равновесия, неподвижными точками, точками покоя,
а также критическими точками. Термин особая точка в теории дифференциальных уравнений встречается,
пожалуй, чаще всего. В переводе же предпочтение часто отдается термину точка равновесия из-за очевидной
механической интерпретации. Что же касается функций F и G, то у них в этой точке никаких особенностей
нет. Особенности могут появиться у соответствующего поля, например поля направлений. В окрестности этих
точек может меняться, например, направление. — Примеч. ред.
2 А также стационарным решением. Напомню, что точки равновесия называют очень часто особыми точками.
Можно было бы подумать, что интегральная кривая, походящая через точку равновесия (особую точку),
представляет собой график особого решения. Но особые решения в теории дифференциальных уравнений имеют
совсем другое определение (особым называется решение, в каждой точке которого нарушается
единственность решения задачи Коши). Это также одна из причин, по которой в переводе мы часто отдаем предпочтение
термину точка равновесия. — Примеч. ред.
6*4. Устоймиводгь И1фазов$1Я плоскость 511
либо
у = д или 16-2у-х = 0. FЬ)
Если х = 0 и у ф О, то из второго равнения FЬ) находим у — 8. Если
у — О и ж Ф 0, то из второго уравнения Fа) определяем х — 1. Если х и у
отличны от нуля, то мы решаем систему уравнений
м J 2х+^=14, х + 22/ = 16,
из которой находим х = 4, у = 6. Таким образом, система E) имеет
найденные нами четыре точки равновесия @,0), @,8), G,0) и D,6). Если
x(t) и y(t) обозначают соответственно число кроликов и число белок,
и если численности обеих популяций постоянны, то из этого следует,
что уравнения E) допускают только три нетривиальных возможности:
либо нет кроликов вообще и есть только 8 белок, либо есть 7Щюликов,
а белок нет вообще, либо есть только 4 кролика и 6 белок. В частности,
точка равновесия D,6) описывает единственную возможность для
сосуществований популяций постоянных численностей, отличных от нуля
для обоих видов. ■
Фазовые портреты
Если начальная точка (xq , у о) не является точкой равновесия, то соответствующая
траектория представляет собой кривую в плоскости ху, йо которой перемещается точка (х (t), у (t))
при увеличении t. Оказывается, что любая траектория, не состоящая из единственной
(изолированной) точки, представляет собой невырожденную кривую без самопересечений
(задача 30). Чтобы показать качественно поведение решений системы A), достаточно сделать
набросок ее фазового портрета в фазовой плоскости—на фазовом портрете будут отчетливо
видны ее точки равновесия и типичные невырожденные траектории. Мы можем начертить
йоле направлений, рисуя типичные отрезки прямых, имеющие наклон
ty_ = }/_ = G(x,y)
dx x' F(x, у)'
Кроме того, поле направлений можно нарисовать и иначе: для этого достаточно нарисовать
типичные векторы, указывающие в каждой точке в том же самом направлении, что и вектор
у{х, у), G(x, у)K. Такое векторное поле указывает направление, в котором перемещается
частица по траектории, когда "плывет в потоке", задаваемом системой.
На рис. 6.1.1 показаны поле направлений и фазовый портрет для системы,
описывающей популяции белок и кроликов (из примера 1). Стрелки поля направлений указывают
|айравление движения точки (x(t),y(t)). Мы видим, что при любых положительных на-
Шлшых числах xq Ф 4 и уо ф 6 кроликов и белок, эта точка перемещаются по траектории,
Приближающейся к критической (особой) точке D,6) при увеличении t.
*КЬнечн& же, этот вектор имеет наклон ^)*'^<. — Примеч. ред.
512
Глава 6. Нелинейные системы и явления
@,0)
Рис. 6.1.1. Поле направлений
и фазовый портрет системы х' =
= 14г — 2х2 — ху9 у' — 16?/ —
— 2у2 — ху, описывающей
популяции белок и кроликов (пример 1)
Пример 2
В случае системы
х =х~у,
у' = 1-х2
G)
из первого уравнения следует, что х = у9 а из второго — что х = ±1
в каждой критической точке. Таким образом, эта система имеет две точки
равновесия: (—1, —1) и A,1). Поле направлений на рис. 6.1.2
показывает, что траектории тем или иным способом "вращаются" против часовой
стрелки вокруг точки равновесия (—1,-1), причем кажется, что
некоторые траектории приближаются к точке равновесия A,1), а другие убегают
от нее. Эти наблюдения подтверждаются фазовым портретом системы G),
показанным на рис. 6.1.3. \ ■
2Г
1 h
>> 0
-1
-2
-3
- (-1,-1),
. A,1) ^
\ L.
-3 -2
Рис. 6.1.2. Поле
направлений системы уравнений G)
Рис. 6.1.3. Фазовый портрет
системы уравнений G)
6.1. Устойчивость и фазовая плоскость 513
Поведение в окрестности точки равновесия
Поведение траекторий в окрестности изолированной точки равновесия автономной системы
представляет особый интерес. В оставшейся части этого раздела мы на простых примерах
проиллюстрируем некоторые из самых общих возможностей.
Пример 3
Рассмотрим автономную линейную систему
dx
dy
— — —ку (к — отличная от нуля константа),
at
(8)
единственная точка равновесия которой находится в начале координат
@,0). Решение, выходящее из начальной точки (хо, уо), имеет вид
x(t)=x0e-\ y(t) = y0e-kt. (9)
Если хо ф 0, мы можем написать
у = Уое-ы = Ц(х0е-г)к = Ьхк, A0)
Xq
где Ъ = уо/х§. Характер (природа) точки равновесия @,0) зависит от
того, положителен или отрицателен отличный от нуля параметр к.
Случай 1: к > 0. Если параметр к положителен, то из (9) мы видим,
что точка (х (£), у (t)) приближается к началу координат по кривой у = Ьхк
при t —► +оо. Вид этой кривой зависит от величины к:
• если к = 1, то у — Ьх (причем Ь = уо/хо) — прямая линия,
проходящая через точку (xq ,уо). Эти прямолинейные траектории отчетливо
видны на фазовом портрете, приведенном на рис. 6.1.4;
• если к > 1 и ни хо, ни у о в уравнении A0) не равно нулю, то
кривая у = Ьхк касается оси х в начале координат. Этот случай
иллюстрирован фазовым портретом, приведенным на рис. 6.1.5,
где к = 2 и все траектории — параболы. Более точно, траекториями
являются полуоси и правые и левые половины (ветви) этих парабол;
• если 0 < к < 1 и ни хо, ни 2/о не равно нулю, то фазовый портрет
подобен приведенному на рис. 6.1.5, за исключением того, что каждая
кривая у = Ьхк касается оси у (а не оси х) в начале координат.
Тип точки равновесия, показанной на рис. 6.1.4 и 6.1.5 называется
узлом. Вообще, критическую точку (#*, у+) автономной системы A) на-4
зывают узлом, если
• либо все траектории стремятся к (х+,у+) при t —► +оо, либо все
траектории выходят из (ж*, ?/*) при t —» +оо, и
• каждая траектория касается в (#*, у+) некоторой прямой,
проходящей через критическую точку.
514 Глава в. Нелинейные системы и явления
Рис. 6.1.4. Дикритический
узел; все траектории входят
в начало координат,
следовательно, этот узел представляет
собой сток
Рис. 6.1.5. Вырожденный узел,
потому что все траектории
касаются одной прямой; они
приближаются к началу координат, так
что этот узел — сток
Узел называется дикритическим (собственным, правильным), если
никакие две различные пары "противоположных" траекторий не каса-
тельны к одной и той же самой прямой, проходящей через критическую
точку. Именно такой узел изображен на рис. 6.1.4 (в котором траектории
являются прямыми линиями, а не просто касательными к прямым
линиям). Дикритический узел можно было бы назвать "звездной точкой",
или "нейтральной точкой звезды". На рис. 6.1.5 все траектории (кроме
одной противоположной пары) касаются одной прямой, проходящей через
критическую точку. Этот тип узла называется вырожденным
(несобственным, или неправильным).
Узел также называют стоком, если все траектории приближаются
к критической точке, и источником, если все траектории выходят
(убегают) из нее. Таким образом, начало координат на рис. 6.1.4 —
дикритический узел-сток, тогда как на рис. 6.1.5 изображен несобственный
узел-сток. Если бы стрелки поля направлений на каждом рисунке были
обращены в противоположном направлении, то начало координат было
бы узлом-источником на каждом из этих рисунков4.
Случай 2: к < 0. Если к отрицательно, то по виду траектории похожи
наизображенныенарис.бЛ.бдляслучая/с = — 1. Если ни хо, ни уо не
равны нулю, то соответствующая траектория нарис. 6.1.6 представляет собой
одну ветвь равнобочной гиперболы ху = Ьи \y(t)\ —> +оопри£ —► +оо.
Если хо или 2/о равно нулю, то траектория представляет собой полуось
4 Подытожим сказанное об узлах. Узел — это тип расположения траекторий автономной системы обыкновенных
дифференциальных уравнений второго порядка
я' = /(а>), х = (хих2), /:ССЯ2—Я2, feC(G),
где G — область единственности в окрестности особой точки xq. Этот тип характеризуется следующим
образом. Существует окрестность U точки хо, такая что для всех траекторий системы, начинающихся в U\{xq}>
отрицательные полутраектории являются уходящими (с течением времени покидают любой компакт V С U),
6.1. Устойчивость и фазовая плоскость 515
гиперболы5. Точка (#(£), y(t)) приближается к началу координат по оси
х, но убегает от него по оси у при t —> +оо. Таким образом, есть две
траектории, которые приближаются к критической точке @,0), но все другие
неограничены при t —► +оо. Этот тип точки равновесия, показанной на
рис. 6.1.6, называется седловой точкой или просто седлом. ■
2
1
* 0
-1
-2
-2-1012
х
Рис. 6.1.6. Седловая точка
с траекториями,
напоминающими контурные кривые
седловой точки на поверхности
а положительные полутраектории — асимптотическими (не выходя из U, примыкают к хо, причем, будучи
дополнены самой точкой хо, касаются в ней определенных направлений), или наоборот. Узлом называется
в таком случае и сама точка хо. Классификация узлов и особых точек у разных авторов может отличаться.
Узлом называют, например, точку притяжения, в которой все орбиты, отличные от стационарной точки, имеют
касательную в стационарной точке. (Изолированная стационарная точка х = 0 называется точкой притяжения
для t = оо (или t = —оо), если все решения х = x(t) задачи х' = /(ж), х@) = xq при малых ||жо||
существуют для t ^ 0 (или t ^ 0) и xo(t) —► 0 при t —► оо (или t —► —оо).) Пусть / 6 C1(G), причем
ненулевая матрица Якоби в точке покоя имеет различные действительные собственные значения Ai и Аг
одного знака. Тогда такая точка будет узлом. Однако узлом точка покоя может быть и в тех случаях, когда
Ai = Аг Ф 0, Ai = 0 Ф Аг, Ai = Аг = 0. В случае Ai = А2 Ф 0 точка хо будет узлом, если / € C2{G),
в противном случае она может оказаться фокусом. Узел называется обыкновенным, если все траектории
системы касаются в точке хо направлений, соответствующих меньшему по абсолютной величине собственному
значению Ai, за исключением двух траекторий, которые касаются в хо направлений, соответствующих другому
собственному значению (при этом различаются диаметрально противоположные направления). Если Ai = A2,
то собственными для матрицы Якоби будут либо лишь два противоположных направления (в этом случае
узел называется вырожденным), либо все направления. Если собственными являются все направления, то
при условии / € C2(G) каждого направления касается в точке хо единственная траектория системы, и такой
узел называется дикритическим. Но часто употребляются и другие названия узлов. Дикритический узел часто
называется собственным (иногда также особым), вырожденный узел — несобственным. Кроме того, часто узел
называется собственным, если для каждого направления существует единственное решение, которое касается
этого направления; в противном случае узел часто называется несобственным. Заметьте, что согласно этому
последнему соглашению к несобственным узлам относятся не только вырожденные узлы, но и {простые)
узлы. — Примеч. ред.
5 Имеется в виду, конечно, координатная полуось, т. е. "полуасимптота" гиперболы. — Примеч. ред.
516 Глава 6. Нелинейные системы и явления
Устойчивость
Точка равновесия (ж*, у*) автономной системы A) называется устойчивой, если из
того, что начальная точка (хо,уо) расположена достаточно близко к (ж*, у*), следует, что
(x(t),y(t)) остается близкой к (х*,у*) для всех t > 0. В векторной системе обозначений
х(£) = (#(£), y(t)) расстояние между начальной точкой хо = (#о, Уо) и точкой равновесия
х* = (ж*, у*) равно
|х0 - х*| = у/(х0 - #*J + (уо - У*J •
Таким образом, точка равновесия х* устойчива, если выполнено следующее условие: для
каждого б > 0 существует S > 0 такое, что если
> |хо - х*| < 5, то |х(£) - х*| < б A1)
для всех t > 0. Обратите внимание, что условие A1) тривиально выполнено, если х(£) —> х*
при t —> +оо как в случае узла-стока. Таким образом, узлы-стоки, показанные на рис. 6.1.4
и 6.1.5, представляют собой устойчивые узлы.
Критическую точку (ж*, у*) называют неустойчивой, если она не является
устойчивой. Седловая точка @,0) на рис. 6.1.6 — неустойчивая точка равновесия, потому что точка
(x(t), y(t)) убегает в бесконечность при t —> +оо (при условии, что х0уо Ф 0), и,
следовательно, условие A1) не выполняется.
Если знак правой части в (8) изменить, то получится система
dx
—- = ky (к — отличная от нуля константа).
at
Ее решением будут функции x(t) = хое*9 y(t) = уоеы. Тогда при к = 1
ик = 2 траектории будутте же самые, что и показанные нарис. 6.1.4 и 6.1.5
соответственно, но стрелки будут иметь противоположные направления,
так что точка (x(t), y(t)) убегает в бесконечность при t —► оо. Поэтому
в каждом случае в начале координат @,0) получится узел-источник, т. е.
неустойчивый узел. Ш
точка равновесия, то равновесное решение х (t) = х*, у (t) = у* называется
устойчивым или неустойчивым в зависимости от характера (природы) точки равновесия.
В приложениях часто важно (критически важно!) ответить на вопрос об устойчивости
равновесного решения. Например, предположите в примере 1, что x(t) и y(t) соответственно
обозначают численности популяций кроликов и белок (в сотнях). Мы увидим в разделе 6.3,
что точка равновесия D,6), показанная на рис. 6.1.1, устойчива. Из этого следует, что если
численность популяции кроликов близка к 400, а численность популяции белок — к 600, но
численности популяций не точно равны этим равновесным значениям, то в течение всего
будущего времени в данной среде обитания останутся приблизительно 400 кроликов и
приблизительно 600 белок. Таким образом, практическое следствие устойчивости состоит в том,
что небольшие изменения (возможно из-за случайных рождений и случаев смерти) в
равновесных популяциях не будут расшатывать равновесие настолько, чтобы все кончилось
большими отклонениями от равновесных решений.
Пример 3
Продолжение
Если (ж*, у*) —
6.1. Устойчивость и фазовая плоскость 517
Траектории могут оставаться в окрестности устойчивой точки равновесия, не
приближаясь к ней, как показано в примере 4.
Пример 4
Рассмотрим материальную точку массы га, которая без демфирования
колеблется на пружине, константа Гука которой равна к. Тогда функция,
дающая положение x(t) материальной точки, удовлетворяет
дифференциальному уравнению х" -Ь ш2х = 0 (где а;2 = к/т). Если обозначить
скорость материальной точки данной массы через у — dx/dt9 мы получим
систему
Ах
И
dt
У,
A3)
-uj2x
с общим решением
x(t) = Acosuot -f Bsinut, A4a)
y(t) = — Awsinut + Вш cos u>t. A4b)
При С = V'A2 -f В2, А = С cos а и В = С sin а мы можем переписать
решение системы A4) в форме
x(t) = Ccos(ujt — а), A5а)
y(t) = -uCsm{ut - a). A5b)
Теперь очевидно, что каждая траектория, отличная от точки равновесия
@,0), является эллипсом, уравнение которого можно записать в форме
X У
С2 + ^2С2 ^ L <1б>
Как видно из фазового портрета, приведенного на рис. 6.1.7 (где и = |),
каждая точка (хо, уо), отличная от начала координат плоскости ху, лежит
в точности на одном из этих эллипсов, причем каждое решение (х (t), у (t))
обходит эллипс начиная с его начальной точки (xq, у о) по часовой стрелке
спериодомР = 27г/о;.(ИзA5)видно,чтож(^+Р) = x(t)ny(t+P) = y(t)
для всех t.) Таким образом, каждое нетривиальное решение системы A3)
является периодическим, а его траектория — простая замкнутая кривая,
обходящая критическую точку, расположенную в начале координат. ■
Шрис. 6.1.8 показана типичная эллиптическая траектория из примера 4, причем ее
меньшая полуось обозначена через 59 а ее главная (большая) полуось — через е. Мы видим, что
если начальная точка (хо, у о) удалена от начала координат на расстояние, не превосходящее
8 (так что проходящая через нее эллиптическая траектория лежит внутри вычерченного
эллипса), то точка (x(t), y(t)) всегда остается в пределах заданного расстояния е от начала
координат. Следовательно, начало координат @,0)— устойчивая точка равновесия системы
х' — У->у' — —ш2х. В отличие от случая, показанного на рис. 6.1.4 и 6.1.5, нет никаких
траекторий, приближающихся к точке @,0). Устойчивую критическую точку, окруженную
простыми замкнутыми траекториями, представляющими периодические решения,
называют (устойчивым) центром.
518 Глава 6. Нелинейные системы и явления
Рис. 6.1.7. Поле
направлений и эллиптические
траектории для системы х' = у, у' =
= — \х. Начало координат —
устойчивый центр
Рис. 6.1.8. Если расстояние
начальной точки (xQ,yo) от начала
координат не превышает <5, то
расстояние точки (х(£), y{t)) от
начала координат не превышает е
Асимптотическая устойчивость
Критическую точку (х*, у*) называют асимптотически устойчивой, если она устойчива
и, кроме того, каждая траектория, которая начинается достаточно близко к (х*, ?/•), также
приближается к (ж*, у*) при t —> -f-oo. Иными словами, существует 5 > О, такое что
из |х — х*| < S следует, что lim x(t)
t—юо
A7)
гдех0 = (х0,уо)>х* = (ж*,у*)их(*) = (x(t),y(t)) —решение, причем х@) = х0.
Замечание. Устойчивые узлы, показанные на рис. 6.1.4 и 6.1.5, асимптотически
устойчивы, потому что каждая траектория приближается к критической точке @,0) при t —> -boo.
Центр @,0), показанный на рис. 6.1.7, устойчив, но не асимптотически устойчив, потому что
точка, двигающаяся по любой эллиптической траектории (даже по очень маленькому
эллипсу) не приближается к началу координат. Таким образом, асимптотическая устойчивость —
более сильное условие, чем простая устойчивость. ■
Теперь предположим, что x(t) и y(t) обозначают численности сосуществующих
популяций, для которых (ж*, у*) является асимптотически устойчивой Точкой равновесия. Тогда,
если начальные численности популяций xq и уо достаточно близки к х* и у* соответственно,
той
lim x(t) = х*
t—юо
lim y(t) = у*.
A8)
Иными словами, x(t) и y(t) фактически приближаются к равновесным численностям
популяций х* и у* при t —> -hoo, а не просто остаются близкими к этим значениям.
Для механической системы, как и в примере 4, точка равновесия представляетрявновес-
ное состояние системы — если скорость у = х' и ускорение у' = хп обращаются в нуль
одновременно, то материальная точка заданной массы остается в покое, если
равнодействующая всех сил, действующих на нее, равна нулю. Вопрос об устойчивости точки равновесия
равносилен вопросу о том, как перемещается материальная точка заданной массы» когда она
немного отклонена от ее положения равновесия:
6.1. Устойчивость и фазовая плоскость 519
1) двигается обратно к точке равновесия при t —► +оо,
2) просто остается в окрестности точки равновесия, не приближаясь к нему, или
3) убегает дальше от точки равновесия.
В случае 1 критическая точка [положение равновесия] асимптотически устойчива; в
случае 2 она устойчива, но не асимптотически; а в случае 3 она представляет собой неустойчивую
точку равновесия. Мраморный шарик, находящийся в положении равновесия на вершине
футбольного мяча,—пример системы с неустойчивой точкой равновесия. Материальная
точка заданной массы на пружине с демпфированием иллюстрирует случай асимптотической
устойчивости механической системы. Материальная точка заданной массы на пружине без
демпфирования в примере 4 — пример системы, которая является устойчивой, но не
асимптотически устойчивой.
Пример 5
Предположим, что т = 1 и к = 2 для системы, состоящей из
материальной точки заданной массы и пружины в примере 4, и что к точке заданной
массы приложен также поршень с коэффициентом затухания с = 2. Тогда
функция, выражающаея смещение x(t) данной системы, удовлетворяет
уравнению второго порядка
x"(t) + 2x'(t) + 2x(t) = 0. v A9)
Полагая у = xf, мы получаем эквивалентную систему первого порядка
dx
B0)
^=2/'
с точкой равновесия @,0). Характеристическое уравнение г2+2г+2 = 0
для уравнения A9) имеет корни — 1 + г и — 1 — г, так что общее решение
системы B0) дает функция
x(t) =e~*(Aeos£ + £sin£) = Се~г cos(t - a), B1a)
y(t) = е~1 [(В - A) cost -(АЛ-В) sint] =
Г- * 14 B1Ь)
= -CV2e~* sin (t - а + \ir) ,
где С = VA2 + В2 и а = aictg(B/A). Мы видим, что x(t) и y(t)
колеблются около нуля, принимая то положительные, то отрицательные
значения, причем обе эти функции стремятся к нулю при t —► +оо. Таким
образом, типичные спиральные траектории направлены внутрь к началу
координат, как видно по изображенной спирали на рис. 6.1.9. ■
Из B1) ясно, что точка (x(t), y(t)) приближается к началу координат при t —► +оо, а из
этого следует, что @,0)—асимптотически устойчивая точка равновесия для системы х1 = у,
у' = — 2х — 2у из примера 5. Такую асимптотически устойчивую критическую точку —
вокруг которой траектории обвиваются подобно спирали (при приближении к этой точке), —
520 Глава 6. Нелинейные системы и явления
ч
rsl
Л-МЛ
\
ш\
NV \
\1
Ю \ \
^у t
Рис. 6.1.9. Устойчивый фокус
и одна близлежащая траектория
называют устойчивым фокусом (или спиральным стоком). В случае системы, состоящей
из материальной точки заданной массы, закрепленной на пружине с поршнем,
спиральный сток (устойчивый фокус) в фазовой плоскости свидетельствует о наличии затухающих
колебаний, причем затухание происходит из-за сопротивления.
Если бы стрелки на рис. 6.1.9 были реверсированы, мы увидели бы траекторию, которая,
подобно спирали, разматывается наружу от начала координат. Неустойчивую критическую
точку — вокруг которой траектории раскручиваются по спирали по мере удаления от этой
точки, — называют неустойчивым фокусом (или спиральным источником). В примере 6
показано, что траектория может по спирали накручиваться на замкнутую траекторию —
простую замкнутую интегральную кривую, которая представляет собой периодическое
решение (подобно эллиптическим траекториям на рис. 6.1.7).
Пример 6
Рассмотрим систему
dx . ,л о
— = -ку + хA - х'
at
V),
tt=kx+y{1
B2)
• X
У).
В задаче 21 мы просим вас показать, что @,0) — ее единственная точка
равновесия. Решение этой системы может быть найдено в явном виде
следующим образом. Давайте для этого введем полярные координаты
х = г cos в, у = г sin в. Сначала обратите внимание, что
— - £ ( ИЛ - ху/ - х'у
dt~ dt\arCtgx)~ х* + у* '
Затем данные выражения подставьте в B2) вместо х'иу'.У вас получится
йв ^к(х2+у2)
dt х2+у2
Из этого следует, что
e(t) = kt + в0, где в0 ■= 9@). B3)
6.1. Устойчивость и фазовая плоскость 521
Тогда дифференцирование равенства г2 = х2 + у2 приводит к
dr dx dv
2r— = 2x-— + 2y— =
dt dt dt
= 2(x2 + y2)(l -x2- y2) = 2r2(l - r2),
так что г = r(t) удовлетворяет дифференциальному уравнению
r(l-r2).
В задаче 22 мы просим вас получить решение
г(*) =
го
V^rg + A - г20)е
2\„-2t'
B4)
B5)
где го = г@). Так что типичное решение системы B2) может быть
выражено в форме
x(t) =r(*)cos(fc* + 0o),
y(*) = r(t)sin(fct + e0).
B6)
Еслиго = 1,тоуравнениеB5)даетг(£) = 1(единичнаяокружность).Ина-
че, если г0 > 0, то из уравнения B5) следует, что r(t) —► 1 при £ —> +оо.
Следовательно, траектория, определенная равенствами B6),
накручивается (как спираль) на единичную окружность, если г о > 1, и подобно
спирали приближается к этой замкнутой траектории, если 0 < го < 1.
На рис. 6.1.10 показана траектория, которая подобно спирали
сматывается по направлению от начала координат, и четыре траектории, которые
подобно спирали наматываются внутрь, все приближаясь к замкнутой
траекторииг(£) = 1. ■
*s 0
-1 Ь
Рис. 6.1.10. Спиральные
траектории системы
уравнений B2) при к = 5
522 Глава 6. Нелинейные системы и явления
Рис. 6.1.11. Фокус (-2,1)
и седловая точка B,-1)
Рис. 6.1.12. Фокус A,-1)
Рис. 6.1.13.
@,0)
3' 4
Седловая точка
Рис. 6.1.14. Фокус @,0);сед-
ловые точки (—2, —I) и B,1)
3 4
Рис. 6.1.15. Узел A,1)
Рис. 6.1.16. Фокус (—1, —1),
седловая точка @,о) и узел
A,-1)
При довольно общих предположениях можно показать, что есть четыре возможности
для невырожденной траектории автономной системы
ft=F(x,y), ^t=G(x,y).
6.1. Устойчивость и фазовая плоскость 523
Рис. 6.1.17. Фокус (-2,|)
и седловая точка B, — |)
Рис. 6.1.18. Устойчивый
центр (—1,1)
Вот эти четыре возможности.
1. (#(£), y(t)) приближается к критической точке при t —► +оо;
2. (#(£), г/ (t)) неограниченно удаляется от начала координат с увеличением t;
3. (x(t),y(t)) — периодическое решение, которому соответствует замкнутая
траектория;
4. (x(t)> y(t)) подобно спирали наматывается на замкнутую траекторию при t —► -foo.
Из этого следует, что качественный характер (природа) траекторий (фазового портрета на
фазовой плоскости) автономной системы в значительной степени определяется
местоположениями ее точекравновесия и поведением ее траекторий в окрестности ее точекравноврсия.
В разделе 6.2 мы увидим, что при весьма слабых ограничениях на функции F и G каждая
изолированная точка равновесия системы х1 — F(x, у), у' = G(x, у) качественно
напоминает один из примеров этого раздела — она является узлом (дикритическим или особым),
седлом (седловой точкой), центром или фокусом.
6.1. Задачи
В задачах 1-8 найдите критическую точку (или точки) данной автономной системы и таким
образом найдите фазовый портрет каждой системы среди рис. 6.1.11-6.1.18.
Л dx 0 dy
Lit=2x-y> и = х~3у
5' dt~ у ' dt ~х + гУ
т dx dy о
- dx dy
2-!t=x-y' li = x + 3y-4
4.^=2x-2y-4, %L = x + 4y + 3
, dx dy
6-^=2*-152/' It
8.
= 4~x2
dx 2 . dy 2
— =x-y-x +xy, —=z-y-x
В задачах 9-12 найдите каждое равновесное решение x{t) = хо данного дифференциального
уравнения второго порядка х" + /(#, х') = 0. С помощью компьютерной системы или графического
524 Глава 6. Нелинейные системы и явления
калькулятора начертите фазовый портрет и поле направлений для эквивалентной системы
первого порядка х' = у, у' = —f(x,y). Таким образом установите, напоминает ли точка равновесия
(хо, 0) центр, седловую точку или фокус данной системы.
9. х" + 4х - х3 = 0 10. х" + 2х' + х + 4а:3 = О
11. х" + Зх' + 4sinх = 0 12. х" + (х2 - \)х' + х = О
Решите каждую из линейных систем, данных в задачах 13-20, и определите, устойчива,
асимптотически устойчива или неустойчива точка равновесия @,0). С помощью компьютерной системы
или графического калькулятора начертите фазовый портрет и поле направлений для данной
системы. Таким образом установите устойчивость или неустойчивость каждой точки равновесия
и визуально классифицируйте ее как узел, седловую точку, центр или фокус.
-2у
13.
15.
17.
19.
dx dy
dt ~ ZX' dt "
dx dy
dt ~ ZXf dt "
dx dy
~dt~v' Tt~'x
dt ~ Zy> dt ~ '
14.
16.
18.
20.
dx dy
Tt=2x> i = ~2y
dx dy
Tt=x> -dl = 3y
dx dy
- = -„, -^=4x
dx dy
_=y> Tt=-bx-Ay
21. Проверьте, что @, 0) — единственная точка равновесия системы в примере 6.
22. Отделите переменные в уравнении B4) и найдите решение B5).
В задачах 23-26 задана система dx/dt = F(x, у), dy/dt = G(x, у). Решите уравнение
&у_ _ G{x,y)
dx F(x,y)
и найдите траектории данной системы. С помощью компьютерной системы или графического
калькулятора начертите фазовый портрет и поле направлений для системы и, таким образом,
идентифицируйте визуально очевидную природу и устойчивость точки равновесия @,0) данной
системы.
23-t=y' t = ~X ; 24.^=уA + х2+у2), |=хA + х2 + у2)
25. Щ = 4»A + х2 + у2), ^ = -хA + х2 + у2)
26. ^ = y3e*+v, % = -x3ex+v
at dt
27. Пусть (x(t),y(t)) — нетривиальное решение неавтономной системы
dx dy
Tt=y' Tt=tx-
Предположим, что <j)(t) = x(t -h 7) и i/j(t) = y(t -h 7), где 7^0. Покажите, что (</>(£), V>(£)) не
является решением данной системы.
В задачах 28-30 рассматривается система
%=F{x,y), f=G(*,y)
в области, где функции F uG непрерывно дифференцируемы, так что для каэюдого числа а и точки
(хо, уо) существует единственное решение, такое что х(а) = xq и у (а) = г/о.
6.1. Устойчивость и фазовая плоскость 525
28. Предположим, что (#(£), г/(£)) — решение автономной системы и 7 Ф О- Определите </>(t) =
= x(t 4- 7) и ф(Ь) = y(t + 7)- Затем покажите, что, в отличие от ситуации в задаче 27,
(</>(£),?/>(£)) — также решение системы. Таким образом, автономные системы имеют простое,
но важное свойство: сдвиг решения вдоль оси t также представляет собой решение.
29. Пусть (xi(t),yi(t)) и (хг(£), 2/2(^)) — два решения, траектории которых пересекаются в точке
(жо,2/о); таким образом х\(а) = Х2(Ь) = хо и у\{а) = У2{Ь) = г/о для некоторых значений а
и Ь переменной t. Определите
x3(t) = ж2(* + 7) и 2/з(*) = 2/2(* + 7)»
где 7 = Ь — а, так что (#2(£), 2/2 (£)) и (жз(^), 2/з(^)) имеют ту же самую траекторию. Примените
теорему единственности, чтобы показать, что решения (xi(t),yi(t)) и (жз(£),2/з(£))
совпадают. Следовательно, две первоначальные траектории совпадают. Таким образом, никакие две
различные траектории автономной системы не могут пересечься.
30. Предположим, что решение (xi(t),yi(t)) определено для всех t и что его траектория имеет
точку самопересечения:
xi(a) = xi(a + Р) = жо, ' yi(a) = 2/1 (а + Р) = 2/о
для некоторого Р > 0. Введите решение
x2(t) = xi(t + Р), j/a(t) = yi(t + Р)
и затем примените теорему единственности, чтобы показать, что
xi(t + Р) = xi(t) и yi(t) = yi(t + Р)
для всех t. Таким образом, решение (xi (t), 2/1 (t)) является периодическим с периодом Р и имеет
замкнутую траекторию. Следовательно, решение автономной системы либо является
периодическим с замкнутой траекторией, либо его траектория никогда не проходит через ту же самую
точку дважды (т. е. точки самопересечения отсутствуют).
6.1. Приложение. Фазовые портреты и уравнения
первого порядка
Рассмотрим дифференциальное уравнение первого порядка вида
&у_ = G(x, у)
dx F(x, у)'
а)
найти решение которого в явном виде может быть трудно (или невозможно). Тем не
менее интегральные кривые данного дифференциального уравнения можно вычертить как
траектории соответствующей автономной двумерной системы
§ = *■(*,»), ft =G(x,y). B)
Большая часть графопостроителей, в которых предусмотрено построение решений
обыкновенных дифференциальных уравнений, обычно может вычерчивать фазовые портреты
автономных систем. Многие из таких портретов, приведенных в этой главе, были
вычерчены с помощью программы pplane для пакета MATLAB. Эту программу составил
526 Глава 6. Нелинейные системы и явления
Рис. 6.1.19. Меню программы рр lane пакета MATLAB для вычечивания
поля направлений и фазового портрета системы х' = —х, у' = —2у (они
приведены на рис. 6.1.5)
Джон Полкинг (John Polking), причем она бесплатна для образовательного использовав
(math.rice.edu/-dfield). Другой свободно доступной и дружественной для noj
зователей системы Matlab на основе пакета для решения обыкновенных диффереш
альных уравнений с подобными графическими возможностями является программа 1о
(www. math. uiuc. edu/ iode).
Например, чтобы вычертить интегральные кривые дифференциального уравнения
ф _ 2ху - у2
dx х2
мы чертим траектории системы
dx
~dt '
2ху'
dy о
2ХУ' ~di = 2xy~~y
Результат показан на рис. 6.1.20.
Начертите подобным образом некоторые интегральные кривые для следующих дифс
ренциальных уравнений:
dy __ 4ж — Ъу
dx 2x + Зу
dy^ = 4х-3г/
dx 2x — Ьу
- Ф _ х2 4- 2ху
dx у2,+ 2ху
2.
4.
dy 4х — Ъу
dx 2x — Ъу
dy _ 2ху
dx х2 — у2
6.2. Линейные и почти линейные системы 527
Теперь создайте некоторые собственные примеры. Однородные функции, подобные
приведенным в задачах 1-5 (т. е. рациональные функции с числителем и знаменателем той же
самой степени относительно х и у), вполне подходят для данной цели. Дифференциальное
уравнение
ф __ 25а; + г/A - х2 - г/2)D - х2 - у2)
E)
dx —2Ъу + хA — х2 — г/2) D — х2 — у2)
имеет обсуждаемый вид и Обобщает пример 6 из данного раздела, но найти его решение
в явном виде было бы весьма затруднительно. На его фазовом портрете (рис. 6.1.21) показаны
две периодические замкнутые траектории — окружности г = 1 и г = 2. Кто-нибудь хочет
найти третью окружность?
Рис. 6.1.20. Фазовый
портрет системы уравнений D)
Рис. 6.1.21. Фазовый
портрет системы,
соответствующей уравнению E)
6.2. Линейные и почти линейные системы
Мы теперь обсудим поведение решений автономной системы
dx dy
(i)
в окрестности изолированной точки равйовесия (#о> г/о)» в которой /(#о, г/о) = #(#о> г/о) =
= 0. Критическую точку называют изолированной, если в некоторой ее окрестности нет
другой точки равновесия. Мы считаем, что функции / и д непрерывно дифференцируемы
в окрестности точки (xq, г/о)-
Мы можем принять без потери общности, что хо = уо = 0. В противном случае мы
делаем подстановки и = х — хо, v = у — г/о- Тогда dx/dt = du/dt и dy/dt = dv/dt, так что
система A) эквивалентна системе
du ,., , \ е t \
— = f(u + x0,v + yo) = /i(u,v),
B)
dv , ^ , \
— =д(и + а?о, v + уо) = 9\{Щ v),
для которой начало координат @,0) является изолированной точкой равновесия.
528 Глава 6. Нелинейные системы и явления
Пример 1
Одной из точек равновесия системы
— = Зх — х2 — ху = хC — х — у),
at
— =у + у2 -Зху = уA-3х + у)
является A,2). Мы подставляем и = х — 1, v = у — 2; т. е. х — и + 1,
у = г; + 2. Тогда
3-ж-у = 3-(гл + 1)-(г;Н-2) = -гл-г;
1 - За; + у = 1 - 3(гл + 1) + (v + 2) = -Згл + v,
так что система C) принимает вид
du
^ = (и -f 1)(—it — v) = —u — г? — и2 — uv,
-£ = (v -f 2)(-3u + v) = -6u + 2г; + v2 - 3uv
D)
и имеет @,0) в качестве точки равновесия. Если мы можем определить
траектории системы D) в окрестности начала координат @,0), то тот их
сдвиг (движение плоскости), который начало координат @,0)
переводит в точку A,2), как раз и переведет траектории из начала координат
в окрестность точки A,2) и потому с его помощью мы получим
траектории исходной системы C). Этот метод получения траекторий показан
на рис. 6.2.1 (на котором показаны вычерченные компьютером
траектории системы C) в окрестности точки равновесия A,2) на плоскости ху
и рис. 6.2.2 (на котором показаны вычерченные компьютером траектории
системы D) в окрестности точки равновесия @,0) в плоскости uv). Ш
Рис. 6.2.1 и 6.2.2 иллюстрируют тот факт, что интегральные кривые системы A) (с
неизвестными функциями х и у) являются просто образами при сдвиге (и, v) —> (и 4- хо, v -f у о)
интегральных кривых системы B) (с неизвестными функциями unv).B окрестностях двух
соответствующих точек равновесия — (#о, Уо) в плоскости ху и @,0) в плоскости uv — оба
фазовых портрета выглядят в точности одинаково.
Линеаризация в окрестности точки равновесия
Из формулы Тейлора для функций двух переменных следует, что если функция /(#, у)
непрерывно дифференцируема в окрестности неподвижной точки (хо ,у0),то
f(x0 + и, уо + v) = /(ж0, уо) + /*(яо, Уо)и + fy(xo, yo)v + r(u, v),
где остаточный член г (и, v) удовлетворяет условию
r(u, v)
Ит Л о = 0-
(ti,w)-+@,0) у/и2 + V2
6.2. Линейные и почти линейные системы 529
A,2).
^ 2
V* г a ill
>; * ^ ^ .^ J
i i j J,^ J
Рис. 6.2.1. Седловая точка
A,2)системых' = Зх—х2 —ху,
у' = у + у2 — Зху из примера 1
@,0)
Рис. 6.2.2. Седловая точка
@,0) эквивалентной системы
и1 = —и — v — и2 — uv, г/ =
= -6и + 2v + v2 - Suv
(Обратите внимание, что это условие не было бы удовлетворено, если бы r(u, v) было
суммой, содержащей константы или слагаемые, линейные по и или v. В этом смысле, г (г/, г;)
состоит из "нелинейной части" функции /(хо + и, уо + г;), рассматриваемой как функция и
иг;.)
Если мы применим формулу Тейлора к / и </ в равенствах B) и предположим, что (хо, гу0) —
изолированная точка равновесия, так что/(хо, у о) = д(%о,Уо) = 0, то в результате получим
du
~dt
dv
It
= /ж(жо, Уо)и + /у(х0, Уо)У + r(u, v),
= 9х(хо, уо)и + #у(х0, уо)^ + s(u, v),
E)
где r(u, v) и аналогичный остаточный член s(u, v) для # удовлетворяют условию
lim
= lim
(u,v)-»@,0) у/и2 + V2 (u,v)-»@,0) V^2 + V2
0.
F)
Тогда при достаточно малых значениях и и v остаточные члены r(u,v) и s(u, v) являются
тоже очень маленькими (маленькими даже по сравнению с и и г;).
Следовательно, когда точка (и, v) попадает в достаточно малую окрестность начала
координат @,0), то (вообще говоря нелинейная) система и' = /(хо + и, у о + г;), г/ = д(хо +
+ гг, гуо + v) E) достаточно хорошо приближается линеаризованной системой
-^ = /х(»о, г/о)^ + /у (жо, г/о К
"eft
G)
£х(#о, 2/о)^ + £у(#о, г/оК
причем еепостоянныекоэффициенты—значения /ж(х0, yo),fy{x0, уо)идх(х0, уо),ду{х0, у0)
частных производных функций / и д в критической точке (хо, уо)- В предположении, что
@,0) является также изолированной точкой равновесия этой линейной системы и что
остаточный член E) удовлетворяют условию F), первоначальная система х' = /(х, у),
530 Глава 6. Нелинейные системы и явления
у' = д(х,у) называется почти линейной6 в изолированной критической точке (#о?2/о)-
В этом случае ее линеаризация в (хо, Уо) — линейная система G). Короче говоря, эта
линеаризация представляет собой линейную систему u' = Ju (где и = [ и v] ), чья
матрица коэффициентов — так называемая матрица функционального определителя {матрица
Якоби)
> J(x0,2/o)^
функций / и д, вычисленная в точке (хо, У о j-
1х{хО,Уо) fy(Xo,yo)
дх(х0,Уо) gy(;xo,jJoj_
(8)
Пример 1
Продолжение
В C) мы имеем /(ж, у) = Зх — х2 — ху и д{х, у) = у Л-у2 — Зху. Тогда
J(x,y) =
3 — 2х — у —х
-Зу 1 + 2у-Зх
так что
J(l,2)
-1 -1
-6 2
Следовательно, линеаризация системы х' == Зх — х2 — ху, у1 — у +
-h у2 — Зху в ее критической точке A,2) представляет собой линейную
систему
и' = —и — v,
v1 = —6й-Ь 2^>,
которую мы получим, опустив нелинейные (квадратичные) члены
/ в D). ■
Оказывается, что в большинстве случаев (Хотя и не во всех) фазовый портрет почти
линейной системы в окрестности изолированной точки равновесия (х0 > У о) в качественном
отношении сильно напоминает фазовый портрет его линеаризации в окрестности начала
координат. Следовательно, первый шаг к пониманию общих автономных систем должен
состоять в том, чтобы установить характер точек равновесия линейных систем.
Точки равновесия линейных систем
Чтобы исследовать критическую точку @,0) линейной системы
(9)
с постоянной матрицей коэффициентов А, мы можем использовать метод собственных
векторов и собственных значений из раздела 5.2. Вспомните, что собственные значения Ai
и А2 матрицы А являются решениями характеристического уравнения
V"
у.
=
a b
с d
х
.У,
det(A-AI) =
а — А Ъ
, с .d — А
= (a-A)(d-A)-6c = 0.
6 А также квазилинейной и близкой к линейной. — Примеч. ред.
6.2. Линейные и почти линейные системы 531
Мы предполагаем, что @,0) — изолированная точка равновесия системы (9), а из этого
следует, что детерминант матрицы коэффициентов ad—be системы ах + by = 0, сх + dy = 0
отличен от нуля. Отсюда следует, что Л = 0 не является решением (9), и, следовательно,
что оба собственных значения матрицы А отличны от нуля.
Поэтому характер (природа) изолированной точки равновесия @,0) зависит от того,
являются ли два отличных от нуля собственных значения Ai и Лг матрицы А
• вещественными и неравными с тем же самым знаком;
• вещественными и неравными с противоположными знаками;
• вещественными и равными;
• комплексно сопряженными с отличной от нуля вещественной частью; или
• чисто мнимыми числами.
Эти пять случаев обсуждаются отдельно. В каждом случае точка равновесия @,0)
напоминает одну из тех, что мы встретили в примерах раздела 6.1 — узел (обыкновенный или
вырожденный), седловую точку, фокус или центр.
Неравные вещественные собственные значения с тем же самым знаком. В этом
случае матрица А имеет линейно независимые собственные векторы vi и V2 и общее решение
х(£) = [ x(t) y(t) ] системы (9) принимает вид
x(t) = ciVieAl< + c2v2eA2t. A0)
Это решение проще всего описать в косоугольной системе координат и и v, изображенной
на рис. 6.2.3, в которой оси и и v направлены вдоль собственных векторов vi и v2. Тогда
координатные (в координатах и и v) функции u(t) и v(t) двигающейся точки х(£) — просто
ее расстояния от начала координат, измеренные вдоль направлений, параллельных векторам
vi и V2, поэтому из уравнения A0) следует, что траектория системы задается уравнениями
u(t)=u0eXl\ v(t)=.v0eX2\ A1)
Рис. 6.2.3. Косоугольная
система координат и и v,
определенная собственными
векторами Vi HV2
532 Глава 6. Нелинейные системы и явления
где щ = и@) и vq = ^@). Если vq = 0, то эта траектория находится на оси и, а если г/о = 0,
то она лежит на оси v. В противном случае, т. е. если оба значения гг0 и vo отличны от нуля,
параметрическая кривая A1) может быть задана в явной форме?; = Сик,гдек = A2/Ai > 0.
Эти интегральные кривые в начале координат @,0) касаются оси и, если к > 1, и оси v, если
0 < к < 1. Таким образом, мы имеем в этом случае вырожденный узел — как в примере 3
из раздела 6.1. Если Ai и Х2 положительны, тоизA0)иA1) следует, что эти интегральные
кривые убегают от начала координат при увеличении t, так что @,0) — узел-источник.
Но если оба значения Ai и А2 отрицательны, то эти интегральные кривые приближаются
к началу координат при увеличении t, так что @,0) — узел-сток.
Пример 2
A=i
(а) Матрица
7 3
-3 17
имеет собственные значения Ai = 1 и А2 = 2 с соответствующими
собственными векторами vi = [ 3 1 ] и v2 = [ 1 3 ] . На рис. 6.2.4
показаны поле направлений и типичные траектории соответствующей
линейной системы х' = Ах. Обратите внимание, что эти два
собственных вектора указывают в направлениях прямолинейных траекторий. Как
и характерно для вырожденного узла, все другие траектории касательны
к одной из наклонных осей в начале координат. В этом примере оба
неравных вещественных собственных значения положительны, так что точка
равновесия @,0)— вырожденный узел-источник.
4
3
2
1
ч 0
-1
-2
-3
-4
-5
\1/\ 1/[„ \ f f
\л tт т т f г? > А
_К\\\ \ t f
VTTflFW?
ft //* / Л>М
UL \l| Ф A/ A/i Af-
^r W \ Щ Vj-V
5-4-3-2-1 0 12 3 4 5
Рис. 6.2.4. Вырожденный
узел-источник из примера 2
(b) Матрица
В = -А
имеет собственные значения Ai =
-7 -3
3 -17
-1 и А2 =
-2 с теми же самыми
соответствующими собственными векторами vi = [ 3 1 ] и V2 =
=?= [ 1 3 ] . Новая линейная система х' = Вх имеет то же самое поле
направлений и траектории, что и на рис. 6.2.4, но все стрелки поля
направлений теперь имеют противоположные направления, так что @,0) —
теперь вырожденный узел-сток. ■
6.2. Линейные и почти линейные системы 533
Неравные вещественные собственные значения с противоположными знаками»
Здесь ситуация та же самая, что и в предыдущем случае, за исключением того, что Аг <
< 0 < Aib(H). Траектории при г^о = О или ^о = О лежат на осях и и v, проходящих через
критическую точку @,0). Ели оба значения щ и ^о отличны от нуля, то кривые могут быть
заданы в явной форме v = Сик9 где к = А2/А1 < 0. Как ив случае к < 0 из примера 3
в разделе 6.1, нелинейные траектории напоминают гиперболы, причем точка равновесия
@,0) — неустойчивая седловая точка.
имеет собственные значения Ai = 1 и А2 = —1с соответствующими
собственными векторами vi = [3 1] hv2 = [1 3] .На РИС. O.Z.D
показаны поле направлений и типичные траектории соответствующей
линейной системы х' = Ах. Обратите внимание, что эти два собственных
вектора снова указывают в направлениях прямолинейных траекторий.
Здесь к = — 1 и нелинейные траектории — гиперболы в наклонной
системе координат uv, так что мы имеем седловую точку, как и показано
на рисунке. Обратите внимание, что эти два собственных вектора имеют
асимптотические направления для этих гипербол. ■
Рис. 6.2.5. Седловая точка
в примере 3
Равные вещественные корни. В этом случае, при А = Ai = A2 ф 0, тип точки
равновесия @,0) зависит от того, имеет ли матрица коэффициентов А два линейно независимых
собственных вектора vi и V2. Если это так, то мы имеем косоугольную систему координат и
и v (как на рис. 6.2.3), и траектории определяются уравнениями
u(t) = u0ext, v(t) = v0ext, A2)
которые по виду напоминают уравнения (И). Но теперь к = А2/А1 = 1, так что все
траектории при щ ф 0 имеют форму v = Си и9 следовательно, лежат на прямых линиях,
проходящих через начало координат. Поэтому @,0) — дикритический узел (или звезда),
как показано на рис. 6.1.4, причем он является источником, если А > 0, и стоком, если А < 0.
534 Глава 6. Нелинейные системы и явления
Если кратное собственное значение Л ф 0 имеет только единственный соответствующий1
собственный вектор vi> то (как мы видели в разделе 5.4), тем не менее, существует
обобщенный собственный вектор V2, такой что (А — AJ)v2 = viv и линейная системах' =р Ах*
имеет два линейно независимых решения
xi (t) = vieAt и x2(£) '"= Ш + v2>At. A3)
i
Мы можем все еще использовать эти два вектора vi и v2, чтобы ввести косоугольные
координаты и и v, как показано на рис. 6.2.3. Тогда из A3) следует, что координатные функции
u(t) и v(t) двигающейся точки х(£) на траектории даются формулами
u(t) = (и0 + v0t)ext, v(t) = г;0еЛ*г A4)
где uq '-=*■ i/@) и г^о = г^@). Если vo = б, то эта траектория лежит на оси и. В противном
случае мы имеем непрямолйнейную траекторию 6
dv __ dv/dt _ Xv0ext
du
Xvq
du/db voext -f X(uo -h vot)eXt vo -f \(щ -}; Vot)' I
Мы видим, что dv/du —> 0 при t —> ±oo, поэтому отсюда следует, что каждая траектория
касается оси гг. Следовательно, @,0) — вырожденный узел. Если Л < 0, тогда из A4)
следует, что этот узел — сток, но это источник, если Л > 0.
Пример 4
Матрица
А-±
-11
-1
— 1, которому соответствует
[ 3 1 ] . Оказывается, что
имеет кратное собственное значение Л
единственный собственный вектор vi
V2 = [ 1 3] — обобщенный собственный вектор, основанный на vi,
но единственный настоящий собственный вектор обнаруживается на
фазовом портрете линейной системы х' = Ах. Как показано на рис. 6.2.6,
собственный вектор Vi определяет ось и, проходящую через
вырожденный узел-сток @,0); эта ось является касательной к каждой из
непрямолинейных траекторий. ■
Рис, 6.2.6. Вырожденный
узел-сток из примера 4
6.2. Линейные и почти линейные системы 535
Комплексно сопряженные собственные значения. Предположим, что матрица А имеет
собственные значения \~p + qin\ — p — qi (причем оба числа р и q отличны от нуля),
которым соответствуют комплексно сопряженные собственные векторы v = a + binv =
= а — Ы. Тогда в разделе 5.2 мы видели (см. там равенство B2)), что линейная система
х' = Ах имеет два независимых действительных решения
Xi (t) = ер (a cos qt — Ъ sin qt) и Х2 {t) = ep (b cos qt -f a sin qt)
A5)
Таким образом, компоненты x (t) ny(t) любого решения х(£) = c\ xi (t)+c^ X2 (t) колеблются
между положительными и отрицательными значениями при увеличении £, так что точка
равновесия @,0) — фокус, как было в примере 5 из раздела 6.1. Если вещественная часть
р собственных значений отрицательна, то из A5) ясно, что х(£) —* О при t —» -foo, так что
начало координат—спиральный сток (устойчивый фокус). Но еслир положительно, то точка
равновесия — спиральный источник (неустойчивый фокус).
Пример 5
Матрица
А- 1
-10 15
-15 8
имеет комплексно сопряженные собственные значения А = —\ ± Зге
отрицательной вещественной частью, так что @,0) — спиральный сток
(устойчивый фокус). На рис. 6.2.7 показаны поле направлений и
типичная спиральная траектория, приближающаяся к началу координат при
t -* +оо. ■
Рис. 6.2.7. Спиральный сток
(устойчивый фокус) из примера 5
Чисто мнимые собственные значения. Если матрица А имеет сопряженные мнимые
собственные значения А = qi и А = — qi с соответствующими комплексно сопряженными
собственными векторами v = a-f-binv = a — Ы, то A5) при р = 0 дает независимые
решения
xi(£) = acosgt — bsinqtf и хг(^) = bcosqtf H- asinqtf
(i6)
536 Глава 6. Нелинейные системы и явления
линейной системы х' = Ах. Так же как в примере 4 из раздела 6.1, из этого следует, что любое
решение х(£) = cixi (£) + сгх2 (t) дает эллипс с центром в начале координат в плоскости ху.
Следовательно, начало координат @,0) — устойчивый центр в этом случае.
Пример б
Матрица
-9 15
-15 9
имеет чисто мнимые сопряженные собственные значения Л = ±3г, и
поэтому @,0) — устойчивый центр. На рис. 6.2.8 показаны поле
направлений и типичные эллиптические траекторий, внутри которых находится
критическая точка. ■
5
4
3
2
1
ч 0
-1
-2
-3
-4
-5
/* S* S* S* S
/// л >
У//АЛ
■Г / t 4 ^
±7 *"s*£"
—i—i.. i, i
Л > * 4 /■
-5-4-3-2-1 0 1
,K / / /' / /
К *V ^V /
.kV is s s i/
Y V iS S i/ S
f «WK4
2 3 4 5
Рис. 6.2.8. Устойчивый центр
из примера 6
Для двумерной линейной системы х' = Ах с det А ^ 0в таблице на рис. 6.2.9
указан тип точки равновесия в начале координат @,0), найденный в этих пяти рассмотренных
здесь случаях в зависимости от характера (природы) собственных значений Ai и \%
матрицы коэффициентов А. Наше обсуждение различных случаев показывает, что устойчивость
точки равновесия @,0) определяется знаками вещественных частей этих собственных
значений, как утверждается в заключении теоремы 1. Обратите внимание, что если Ai и Л2
вещественны, то они сами являются их вещественными частями.
точки равновесия
Вещественные, неравные, того же самого знака
Вещественные, неравные, противоположных знаков
Вещественные равные
Комплексно сопряженные
Чисто мнимые числа
Вырожденный узел
Седловая точка
Дикритический или вырожденный узел
Фокус
Центр
Рис. 6.2.9. Классификация точки равновесия @,0) двумерной системы х' = Ах.
6.2. Линейные и почти линейные системы 537
Устойчивость линейных систем
собственные значения матрицы коэффициентов А двумерной линейной
ах + by,
A7)
cx + dy,
причем ad — Ьсф 0. Тогда точка равновесия @,0)
1) асимптотически устойчива, если обе вещественные части корней Ai и Аг отрицательны;
2) устойчива, но не асимптотически устойчива, если обе вещественные части Ai и Аг
нулевые (такчто Ai, A2 = ±qi);
3) неустойчивая, если Ai или А2 имеет положительную вещественную часть. А
Особого внимания заслуживает исследование эффекта маленьких возмущений в
коэффициентах а, Ь, с и d линейной системы A7), которые приводят к маленьким возмущениям
в собственных значениях Ai и А2. Если эти возмущения действительно являются
достаточно маленькими, то положительные вещественные части (собственных значений Ai и А2)
остаются положительными и отрицательные вещественные части остаются
отрицательными. Следовательно, асимптотически устойчивая точка равновесия остается асимптотически
устойчивой, а неустойчивая точка равновесия остается неустойчивой. Поэтому
единственный случай, в котором произвольно маленькие возмущения могут затронуть устойчивость
точки равновесия @,0), рассматривается в части 2 теоремы 1. В этом случае чисто мнимые
корни Ai, A2 = ±дг характеристического уравнения могут измениться; корни могут принять
близлежащие комплексные значения /хь //2 = r±si, причем г может стать положительным
или отрицательным (рис. 6.2.10). Следовательно, маленькое возмущение коэффициентов
линейной системы G) может привести к смене устойчивого центра фокусом, который является
либо неустойчивым, либо асимптотически устойчивым.
Есть еще один исключительный случай, в котором за счет маленького возмущения
коэффициентов может измениться тип (но не устойчивость) точки равновесия @,0) в результате
возмущения коэффициентов. Дело обстоит так при Ai = A2, т. е. когда уравнение имеет
равные корни Ai = A2, которые (при маленьком возмущении коэффициентов) могут распасться
на два корня /ii и /i2, которые будут либо комплексно сопряженными, либо неравными
вещественными корнями (рис. 6.2.11). В любом случае знак вещественных частей корней
сохраняется, так что устойчивость (или неустойчивость) точки равновесия сохранится.
Однако ее характер (природа) может измениться, в таблице на рис. 6.2.9 показано, что узел при
Ai = A2 может либо остаться узлом (если ji\ и ^ вещественны) или будет заменен фокусом
(если /xi и /Х2 комплексно сопряжены).
Предположим, что линейная система A7) моделирует физическое явление.
Маловероятно, что коэффициенты в A7) могут быть измерены абсолютно точно, так что предположим,
Пусть Ai и А2 —
системы
dx
~аЧ
<ку_
dt
538 Глава 6. Нелинейные системы и явления
Aj — qi <
o^j = r + 5i
оД2 = ''~'у'
X2 = -qi f
Рис. 6.2.10. Эффекты
возмущения чисто мнимых корней
Mi
/*1°ч. Комплексно
■^сопряженные
' корни
A,=A2
»2
Различные
вещественные
V>26 корни
Рис. 6.2.11. Эффекты
возмущения вещественных равных
корней
что уточненная линейная модель имеет вид
dx . ..
— =а х + Ъ у,
A7*)
Если коэффициенты в A7) достаточно близки к коэффициентам в A7*), то из обсуждения
в предыдущем абзаце следует, что начало координат @,0) — асимптотически устойчивая
точка равновесия для системы A7), если она является асимптотически устойчивой точкой
равновесия для системы A7*), и неустойчивая точка равновесия для системы A7), если она
является неустойчивой точкой равновесия для системы A7*). Таким образом, в этом случае
приблизительная модель A7) и точная модель A7*) предсказывают то же самое качественное
поведение (имея в виду асимптотическую устойчивость или неустойчивость).
Почти линейные системы
Мы теперь возвращаемся к рассмотрению почти линейной системы
dx 1 / \
— = ах + Ъу + г(х,у),
dy , ч
. — = ca? + dy + s(x,y),
A8)
для которой начало координат @,0) является изолированной точкой равновесия при ad —
— bc^O. Теорема 2, которую мы оставляем без доказательства, по сути, утверждает, что по
отношению к типу устойчивости точки равновесия @,0) влияние маленьких нелинейных
слагаемых г(ж, у) и«(#, у) эквивалентно влиянию маленького возмущения в коэффициентах
соответствующей л шейной системы A7).
;стрйч^^
Теорема 2
Пусть Л1 и Лг — собственные значения матрицы коэффициентов линейной системы A7),
соответствующей почти линейной системе A8). Тогда справедливы следующие утверждения.
6,2v Линейные и шчтйглииейные системы
539
1. Если Ai = A2 — равные вещественные собственные значения, то точка
равновесия @,0) системы A8) является узлом либо фокусом, причем она асимптотически
устойчива, если Ai = A2 < 0, и неустойчива, если Ai = A2 > 0.
2. Если Ai и Аг — чисто мнимые числа, то начало координат @,0) является либо
центром, либо фокусом, причем оно может быть асимптотически устойчивым,
устойчивым или неустойчивым.
3. Во всех остальных случаях, т. е. исключая случаи, когда Ai и А2 являются либо
вещественными равными, либо чисто мнимымыми числами, точка равновесия @,0)
почти линейной системы A8) имеет тот же самый тип и устойчивость, что и точка
равновесия @,0) соответствующей линейной системы A7). А
Таким образом, если Ai ф Аг и Re(Ai) -ф 0, то тип и устойчивость точки
равновесия почти линейной системы A8) могут быть определены путем анализа соответствующей
ей линейной системы A7) и только в случае чисто мнимых собственных значений
устойчивость начала координат @,0) нельзя определить путем анализа соответствующей ей
линейной системы. Кроме "чувствительных" случаев (т. е. случаев, когда все зависит от
конкретных условий или изменения условий) Ai = A2 и Re(A^) = 0, траектории в окрестности
начала координат @,0) напоминают качественно таковые для соответствующей линейной
системы—они входят в критическую точку (или обходят ее) тем же самым способом, но могут
быть "деформированы" нелинейным преобразованием. Таблица на рис. 6.2.12 суммирует
сказанное.
для линеаризованной системы
ШШШШЯШЯШ:
почти линейной системы
Ai < А2 < 0
Ai = А2 < 0
Ах < 0 < А2
Ai = А2 > 0
Ах > А2 > 0
Ai, А2 = а =Ь Ы (а < 0)
Ai, А2 = а ± Ы (а > 0)
Ai, А2 = ±6г
Устойчивый несобственный узел
Устойчивый узел или фокус
Неустойчивая седловая точка »
Неустойчивый узел или фокус
Неустойчивый несобственный узел
Устойчивый фокус
Неустойчивый фокус
Устойчивый или неустойчивый центр или фокус
Рис. 6.2.12. Классификация точек равновесия почти линейной системы
Важное следствие классификации случаев в теореме 2 состоит в том, что точка
равновесия почти линейной системы является асимптотически устойчивой, если она
асимптотически устойчивая точка равновесия линеаризации системы. Кроме того, точка
равновесия почти линейной системы неустойчива, если она является неустойчивой точкой
равновесия линеаризованной системы. Если для моделирования физического явления используется
почти линейная система, то — кроме чувствительных случаев, упомянутых,раньше, — из
этого следует, что качественное поведение системы в окрестности точки равййвесия может
быть определено в результате исследования линеаризации данной системы.
540 Глава 6. НеЛийёйные системы и явления
Пример 7
Определим тип и устойчивость точки равновесия @,0) почти линейной
системы
dx
~dt
4ж + 2у + 2ж2 -Зу2,
dt
A9)
= 4ж — Зу Н- 7жу.
Решение
Характеристическое уравнение для соответствующей линейной системы
(ее получить очень просто — нужно только удалить квадратичные
слагаемые в A9)) имеет вид
D - А)(-3 - А) - 8 ^ (А - 5)(А + 4) = 0,
так что собственные значения Ai = 5 и А2 = —4 вещественны, неравны
и имеют противоположные знаки. Из предыдущего обсуждения этого
случая мы знаем, что @,0)—неустойчивая селловая точка линейной системы
ц, следовательно, по части 3 теоремы 2, это также неустойчивая седло-
вая точка почти линейной системы A9). Траектории линейной системы
в окрестности начала координат @,0) показаны на рис. 6.2.13, а таковые
нелинейной системы A9) показаны на рис. 6.2.14. На рис. 6.2.15 показан
фазовый портрет нелинейной системы A9) с "птичьего полета". Кроме
седловой точки в начале координат @,0), есть еще фокусы в
окрестности точек @,279,1,065) и @,933, —1,057), а также узел рядом с точкой
(-2,354,-0,483). ■
0.4
0.2
0.0
0.2
0.4
1
"
I*
-■;?•-■_
i
-- -
1 ,
.1 l I
... j
, 41».
1
•'''„"w
,Ц
. ' -\
/J
i
0.4
0.2
^ 0.0
-0.2
-0 4
1/ 1
-/ /
У .'
■,
*
— - ' *
-" U-#i
€^':--
us ~ •-.-,.
:_-.-,
I I
i i; ii|i
? г* Ъ t ?
? Ift*
J { H
f
' ^^rj«,— . _
*>■''
""" "v
-*.
*'V
* 4. I
I 4! '
'*«■
4.
,-'
к
4
i ; '
''Vl -■
V,-
!,--i -
"i
-",-^1
,<<-'-" V H
;J
,—
/■
/ -
/ .^
/
.1 *i
-0.4 -0.2 0.0 0.2 0.4
Рис. 6.2.13. Траектории
линеаризованной системы из примера 7
-0.4 -0.2 0.0 0.2 0.4
д:
Рис. 6.2.14. Траектории
исходной почти линейной
системы из примера 7
Мы видели, что система х' = /(ж, у), у' — д(х, у) с изолированной точкой равновесия
(жо, у о) с помощью подстановки ж = гб + жо,2/ = /и + 2/о может быть преобразована к
эквивалентной системе с неизвестными и и v (причем у новой системы соответствующая точка
равновесия будет находиться в начале координат @,0))илинеаризациябудетиметьвиди' =
=Ju, причем ее матрица коэффициентов J преставляет собой матрицу Якоби (8) функций
/ и д в точке (жо, Уо)- Следовательно, совсем необязательно выполнять замену явно;
вместо этого можно непосредственно вычислить собственные значения J перед применением
теоремы 2.
6.2. Линейные и почти линейные системы 541
Рис. 6.2.15. Фазовый
портрет почти линейной системы
уравнений A9)
Пример 8
Определим тип и устойчивость точки равновесия D,3) почти линейной
системы
Решение
-£ = 33-l(fc-32/ + x2,
at
ску_
dt
B0)
-18 + 6х + 2у-ху.
При /(ж, у) = 33 — 10ж - Зг/ + ж2,#(ж, ?/) =
2/о = 3 мы имеем
-18 + 6х + 2з/ — хуихо = 4,
J (ж, у) =
-10 + 2ж -3
6 — у 2-х
так что JD,3) =
-2 -3
3 -2
Соответствующая линейная система
du
~dt
dv
~аЧ
-2u - Зг>,
= 3u-2v
B1)
имеет характеристическое уравнение (Л + 2J + 9 = 0, корни которого
Л = — 2±3г являются комплексно сопряженными. Следовательно, начало
координат @,0) — асимптотически устойчивый фокус линейной
системы B1), так что из теоремы 2 следует, что D,3) — асимптотически
устойчивый фокус исходной почти линейной системы B0). На рис. 6.2.16
показана типичная траектория линейной системы B1), причем на рис. 6.2.17
показано, как этот фокус вписывается в фазовый портрет исходной почти
линейной системы B0). ■
542 Глава 6. Нелинейные системы и явления
2
1
> 0
-1
0
! ! Г/>
i L/ i
L_,l L.
1 1
гГК
/J
I !
U~b
i
Рис. 6.2.16. Спиральные
траектории линейной системы
уравнений B1)
Рис. 6.2.17. Фазовый портрет
почти линейной системы
уравнений B0)
6,2. Задачи
В задачах 1-10 с помощью теоремы 1 определите тип точки равновесия @,0) и, кроме того,
определите, является ли она асимптотически устойчивой, устойчивой или неустойчивой.
Проверьте ваше заключение, создав фазовый портрет для данной системы с помощью компьютерной
системы или графического калькулятора.
1.
3.
5.
7.
9.
Tt=~2x + y'
dx
Ht=x + 2y>
dx
'Ш = х-2у'
f=3*-2*'
t=2x-2y'
dy о
J-"*»
s—-*
dV л
м=4х~у
4-4.-*
* dz A
l.-=Ax-y,
4. ^=3x + y,
at
,r dx
~аЧ = У'
dx
*'й = х-3у'
nf = *-*.
t=2x+y
ш=5х~у
dt~3x y
ft=ex-5y
tt=5x-y
В задачах 11-18 каждая из данных систем имеет единственную критическую точку (хо,уо).
С помощью теоремы 2 классифицируйте эту критическую точку (определите ее тип и
устойчивость). Проверьте ваше заключение, создав фазовый портрет для данной системы с помощью
компьютерной системы или графического калькулятора.
11.
13.
15.
17.
dx
т = х-2у'
dx
Tt=2x~y
dx
— = х — v.
dt У>
dx
-dt=x~by
dy.
dt
= Sx - 4y - 2
dy
2, ^ = 3x - 2y - 2
dt
= bx~Sy-2
с dy
5, ^=*-у
12.
14.
16.
18.
dx
H
x-2y-8,
d$L
dt
= x -j- 4y + 10
dy
dx
n = x+y-7'
ft=x-2y+l>
dx
— = 4ж - by + 3, ^ = 5x - 4y + 6
at at
В задачах 19-28 исследуйте тип точки равновесия @,0) данной почти линейной системы.
Проверьте ваше заключение, создав фазовый портрет для данной системы с помощью компьютерной
25.
27.
dx
— = x - 2y + Зху,
dy r> о 2 2
— = 2x - 3y - xz - yz
ax л о
— = x -,y + x -y ,
^ = 2x - у + у4 - x2
6.2.Линейные и дон;шданшнь1е системы 543
системы или графического калькулятора. Также найдите (приблизительно) положения и
очевидные типы любых других точек равновесия, которые будут видны на вашем рисунке. Не поленитесь
исследовать эти дополнительные точки равновесия; для исследований можете использовать
численные методы, обсуждаемые в приложении к этому разделу.
dx dx о
19. -£ = х - Зу + 2ху, ■' 20. — = 6ж - Ъу + х2,
at , at
— = 4х - 6у - ху —- = 2х - у 4- У
at at
21. — = ж + 2у 4- х2 4- У , 22. — = ^ 4- 4у - ху2,
-£ = 2х-2у-3ху -^-=2х-уЛ-х2у
at at
di* (It
23. — = 2x - by 4- x3, ' ' 24. — = 5ir - -3y + </(ж2 4- у2),' *- ° v"
AС ■ ■-•;;.; Ctt _ ?; ;,{•?:; •- - -;, > .
at at
26. § = 3x - 2y - x2 - y\
-£ = 2x-y-3xy
at
28. ^~=3x-y + x3 + y3,
'-£ = 13x - 3y 4- Зху
at
В задачах 29-32 найдите все точки равновесия данной системы и исследуйте тип и
устойчивость каждой из них. Проверьте ваше заключение, создав фазовый портрет для данной системы
с помощью компьютерной системы или графического калькулятора.
™ dx dy 2 dx dy 2
~* dx о ^ dy о лл dx dy
Бифуркации
Термин бифуркация (раздвоение, разветвление, ветвление, двоение, разветвление надвое, развилка)
вообще относится к чему-либо, что может расщепиться или расколоться на части. По
отношению к дифференциальным уравнениям или системам, содержащим параметр, этот термин
означает резкие изменения характера решений, когда сам параметр измененяется непрерывно.
Задачи 33-36 иллюстрируют чувствительные случаи, в которых маленькие возмущения в
коэффициентах линейной или почти линейной системы могут изменить тип или устойчивость (или и то,
и другое) точки равновесия.
33. Рассмотрим линейную систему
dx dy
Tt=ex-y' и = х+еу-
Покажите, что точка равновесия @,0) является (а) устойчивым фокусом, если е < 0; (Ь)
центром, если 6 = 0; (с) неустойчивым фокусом, если е > 0. Таким образом,; маленькие
возмущения системы х' — —у, у' = х могут изменить и тип, и устойчивость точки равновесия.
Рис. 6.2.18 (а)-(е) иллюстрируют потерю устойчивости, которая происходит при е = 0, когда
параметр увеличивается оте< 0 до в > 0.
544
Глава 6. Нелинейные системы и явления
1.0 |—1—i—г
0.5
^ 0.0
-0.5 Ь
-1.0
J *J L
И 1 Г
■м
^и-
4*—L_
тЧ
X
-1.0 -0.5 0.0 0.5 1.0
л;
Рис. 6.2.18, а. Устойчивая
спираль при б = —0,2
1.0
0.5 Ь
I I I If ) ь',ЭВЫгГг 1 I
-0.5
Т—1—!. .4-Л—'—т^
/ А
-d- Ч
A...J
I * °-° 111II mmil I HI
I L ^ ч 'K^i^^ / / /i J
f l_ „r. . ..^; ...5;..;.X.^...f-;;.,...;._j,.....^... .,?.;. -Л
l_V :
I '4 L
-1.0
-1.0 -0.5
./... .;.../.
I И L
0.0 0.5 1.0
x
Рис. 6.2.18, b. Устойчивая
спираль при б = —0,05
1.0
0.5
[i .;/
ъ 0.0
-0.5
-1.0
-I г-"—F*"
Ь k к h
' Г""~ч-
"-+--. J—г
[Ml
7!" Я
/ ' /
-—»""" i i
-1.0 -0.5 0.0 0.5
1.0
Рис. 6.2.18, с. Устойчивый
центр при б = 0
1.0
0.5
^ 0.0
; / : / /:/-^Жч\ \ t :i
, , , ИХ •
0.5 h :K ■•K;->-
ч i
J I L-£
-1.0
-1.0 -0.5 0.0 0.5 1.0
д:
Рис. 6.2.18, d. Неустойчивая
спираль при б = 0,05
1.0
0.5
ъ 0.0
-0.5
-1.0
"I—Т—I Г
- \
J I L_L_
! . ! \..!.—г
^-г
i-4—' {% ') '—i—I-
' ■/
i i i L
-1.0 -0.5 0.0 0.5 1.0
х
Рис. 6.2.18, е. Неустойчивая
спираль при б = 0,2
34. Рассмотрим линейную систему
dx dy
6.2. Линейные и почти линейные системы 545
Покажите, что точка равновесия @,0) является (а) устойчивым фокусом, если е < 0; (Ь)
устойчивым узлом, если 0 ^ в < 1. Таким образом, маленькие возмущения системы х' = — х,
у' = х — у могут изменить тип точки равновесия @,0), не изменяя ее устойчивость.
35. Эта задача имеет дело с почти линейной системой
^ = у + hx(x2 + у2), ^ = -х + hy{x2 + у2),
она иллюстрирует чувствительный случай теоремы 2, в котором теорема не гарантирует
никакой информации об устойчивости точки равновесия @,0). (а) Покажите, что начало координат
@,0) является центром линейной системы, которая получится, если положить h = 0. (b)
Предположим, что h ф 0. Пусть г2 = х2 -Ь у2, затем воспользуйтесь тем, что
dx dy _ dr
dt dt dt
и покажите, что dr/dt = hr3. (с) Предположим, что h = —1. Проинтегрируйте
дифференциальное уравнение (Ь); затем покажите, что г —> 0 при £ —> -Ьоо. Таким образом, @,0) —
асимптотически устойчивая точка равновесия почти линейной системы в этом случае, (d)
Предположим, что h = -hi. Покажите, что г —■» -Ьоо при увеличении t, так что @,0) — неустойчивая
точка равновесия в этом случае.
36. В этой задаче рассматривается знаменитая бифуркация Хопфа (эта бифуркация называется
также бифуркацией рождения цикла. — Примеч. ред.) для почти линейной системы
dx / 2 . 2ч
— = ех + у-х(х +у ),
-^ = -х + еу - у(х2 + у2),
которая имеет мнимые корни характеристического уравнения А = ±г, если е — 0. (а) Как
и в примере 6 из раздела 6.1, перейдите к полярным координатам и получите систему г' =
= г (в — г2), в' = — 1. (Ь) Отделите переменные и проинтегрируйте. Этим вы покажете, что,
если б ^ 0, то r(t) —> 0 при t —> -Ьоо, так что в этом случае начало координат — устойчивый
фокус, (с) Подобным способом покажите, что, если е > 0, то r(t) —> у/ё при t —► -Ьоо,
так что в этом случае начало координат — неустойчивый фокус. Сама окружность r(t) = у/е
представляет собой замкнутое периодическое решение, или предельный цикл. Таким образом,
предельный цикл увеличивающегося размера порождается при увеличении параметра б, когда
он проходит через критическое значение 0.
37. В случае двумерной системы, которая не является почти линейной, структура поведения
траекторий в окрестности изолированной точки равновесия может быть значительно более сложной,
чем структуры в окрестности узлов, центров, седловых точек и фокусов, обсужденных в этом
разделе. Рассмотрите, например, систему
dx , з o„,3n.
— = х{х - 2у ),
B2)
dy ^ /о з Зч
^-2/B* -у)
и убедитесь, что @,0) — изолированная точка равновесия. Эта система не является почти
линейной уже хотя бы потому, что начало координат @,0) не является изолированной точкой
равновесия соответствующей тривиальной линейной системы х' = 0, у' — 0. Решите
однородное уравнение первого порядка
dy = уBх3 - у3)
dx х(х3 — 2у3)
Шб лаврб. Нелинейные системы и явления
^и покажите, что траекториями системы B2) являются листы Декарта, уравнения которых
имеют форму
х3 4- у3 = Зсху,
где с — произвольная постоянная (рис. 6.2.19).
Рис. 6.2.19. Траектории системы
уравнений B2)
5. Сначала обратите внимание, что характеристическое уравнение матрицы А размера 2x2 может
быть записано в форме Л2 — ТА + D — 0, где D обозначает детерминант матрицы А, а Т —
след матрицы А, т.е. сумму ее двух диагональных элементов. Затем примените теорему 1
и покажите, что тип точки равновесия @,0) системы х; = Ах (как показано на рис. 6.2.20)
Рис. 6.2.20. Точка равновесия @,0) системы х' = Ах
.является
• фокусом (стоком или источником), если точка (Г, D)
находится выше параболы Т2 = 4D, но не на оси D;
• устойчивым центром, если (Г, D) находится на
положительной полуоси D;
• узлом (стоком или источником), если (T^D)
находится между параболой и осью Г;
• седловой точкой, если (Т, D) находится ниже оси Т
6-2; Линейные и почти линейные системы 547
определяется положением точки (Т, D) на плоскости с осями координат, по которым
откладываются значения детерминанта и следа, причем горизонтальной осью на этой плоскости
служит Т, вертикальной осью — D.
6.2. Приложение. Фазовые портреты почти
линейных систем
Интересные и сложные фазовые портреты часто появляются в результате простых
нелинейных возмущений линейных систем. Например, на рис. 6.2.21 показан фазовый портрет
почти линейной системы
-yo,os{x + y- !)>
О)
xcos(x — у 4-1).
2
1
О
-1
-2
-2-1012
Рис. 6.2.21. Фазовый
портрет системы уравнений A)
Среди семи точек равновесия, отмеченных точками, мы видим следующие:
• очевидные фокусы в первом и третьем квадрантах плоскости ху\
• очевидные седловые точки во втором и четвертом квадрантах, а также еще одна на
положительной полуоси х\
• точка равновесия неопределенной природы на отрицательной полуоси у;
• очевидно "очень слабый" фокус в начале координат, это означает, что к нему траектории
приближаются очень медленно при увеличении или уменьшении t (в зависимости от
того, что это — сток или источник).
Некоторые системы программного обеспечения для решения обьцсноренных
дифференциальных уравнений могут автоматически определить местонахождение точек равновесия
и классифицировать их. Например, на рис. 6v2.22 показано окно, которое генерирует
программа pplane, написанная Джоном Полкингом (John Polking) для пакета Matlab (она
dx
Ht
dt
548 Глава 6. Нелинейные системы и явления
уже упоминалась в приложении к разделу 6.1). Из него видно, что точка равновесия в
четвертом квадранте на рис. 6.2.21 имеет (приблизительные) координаты A,5708, —2,1416)
и что матрица коэффициентов соответствующей линейной системы имеет положительное
собственное значение Ai « 2,8949 и отрицательное собственное значение Л2 ~ —2,3241.
Поэтому из теоремы 2 следует, что эта точка равновесия действительно является седловой
точкой почти линейной системы A).
Если применить универсальную систему компьютерной алгебры типа Maple или
Mathematical то вам самостоятельно, вероятно, придется сделать совсем немного работы — или
же точно сказать компьютеру, что именно нужно сделать, чтобы найти и классифицировать
критическую точку. Например, команда системы Maple
fsolve({-y*cos(x+y-1)=0,x*cos(x-y+1)=0},
{x,y},{x=l..2,y=-3..-2});
или команда системы Mathematica
FindRoot[{-y*Cos[x+y-1] == 0, x*Cos[x-y+l] == 0},
{x,l,2}, {y,-3,-2}]
найдет координаты указанной ранее точки равновесия а = 1,5708, Ь = —2,1416. Затем
замена х = и + а9 у = v + Ъ приводит к системе
B,1416 - v) cos(l,5708 - и - v) = f(u, v),
B)
A,5708 + и) cosD,7124 + и - v) = д(щ v),
которая получается в результате переноса начала координат. Если мы подставим и — v = 0
в матрицу Якоби д(/, д)/д{и, г>), мы получим матрицу коэффициентов
[2,1416 2,1416]
[ 1,5708 -1,5708 J
линейной системы, соответствующей B). Тогда команда Maple
du
It
dv
~di
6.3. Экологические модели; хищники и конкуренты 549
evalf(Eigenvals(A))
или команда системы Mathematica
Eigenvalues[A]
(вычисляющая собственные значения) позволит найти собственные значения Ai « 2,8949
и Л2 ~ —2,3241, таким образом мы убедимся, что точка равновесия A,5708, —2,1416)
действительно является седловой точкой. ^
Используйте систему компьютерной алгебры, чтобы найти и классифицировать другие
точки равновесия системы A), показанные нарис. 6.2.21. Затем исследуйте подобным
способом придуманную вами почти линейную систему. Один удобный способ создания таких
систем состоит в том, чтобы начать с линейной системы и вставить множители-коэффициенты
с синусом или косинусом примерно так, как сделано это в системе A).
6.3. Экологические модели: хищники и конкуренты
Некоторые из самых интересных и важных приложений теории устойчивости получаются
в результате рассмотрения взаимодействий между несколькими биологическими
популяциями, населяющими ту же самую среду обитания. Мы рассматриваем сначала модель
хищник-жертва, в которой всего два вида. Один вид — хищник — использует в качестве
корма другой вид — жертву (добычу), которая в свою очередь использует в качестве корма
некоторый третий вид продовольствия, в изобилии имеющийся в среде обитания.
Стандартный пример — численности популяций лис и кроликов в лесистой местности; лисы
(хищники) едят кроликов (жертва, добыча), в то время как кролики едят некоторую
растительность в лесистой местности. Другие примеры — акулы (хищники) и продовольственная
рыба (добыча); окунь (хищники) и солнечник (большая медуза) (жертва, добыча); божьи
коровки (хищники) и растительные тли (жертва, добыча), а также жуки (хищники) и более
мелкие насекомые (жертва, добыча).
Классическая математическая модель хищник-жертва была развита в 1920-х годах
итальянским математиком Вито Вольтерра A860-1940) с целью анализа циклических
изменений, наблюдаемых в популяциях акул и промысловых рыб в Адриатическом море. Чтобы
создать такую модель, мы обозначаем численность популяции жертвы в момент времени t
через x(i), а численность популяции хищников — через y(t) и делаем следующие
упрощающие предположения.
1. В отсутствии хищников численность популяции жертвы росла бы по
экспоненциальному закону, причем dx/dt = ах, а > 0.
2. В отсутствии жертвы численность популяции хищника уменьшалась бы по
экспоненциальному закону, причем dy/dt = — by, b > 0.
3. Когда есть и хищники, и жертвы, то в соответствии с этими естественными нормами
прироста и смертности происходит как уменьшение численности популяции
жертвы, так и прирост численности популяции хищника, причем изменение численности
каждой из популяций пропорционально частоте столкновений между особями этих
двух видов. Мы предполагаем далее, что частота таких столкновений
пропорциональна произведению ху, считая, что удвоение любой популяции должно удвоить
частоту столкновений, удвоение же обоих популяций должно учетверить частоту
550 Глава 6. Нелинейные системы и явления
столкновений. Следовательно, потребление жертвы (добычи) хищниками
определяется скоростью взаимодействия, которая приводит
• к уменьшению — рху численности х популяции жертвы (добычи) в результате
охоты, и
• к приросту qxy численности у популяции хищника.
Когда мы учитываем скорость естественного прироста ах и скорость взаимодействия,
приводящую к уменьшению — рху численности х популяций жертвы (добычи), а также
скорость естественного прироста —by и прирост qxy численности у популяции хищника,
мы получаем систему хищник-жертва
dx , \
— =ах- рху = х(а - ру),
d/u
— = -by + qxy = у(-Ъ + qx),
где все константы a,b,pnq положительны. Обратите внимание: в системе A) уравнения для
численности популяций хищника и жертвы (добычи) можно написать в любом порядке.
Однако независимо от порядка важно отметить, что уравнение для численности хищника имеет
отрицательное линейное слагаемое и положительное слагаемое для взаимодействия, тогда
как уравнение численности жертвы (добычи) имеет положительное линейное слагаемое
и отрицательное слагаемое для взаимодействия.
Пример 1
Точки равновесия Точка равновесия общей системы
хищник-жертва A) является решением (х, у) уравнений
х(а - ру) = 0, у(-Ь + qx) = 0. B)
Из первого из этих двух уравнений следует, что или х = 0 или у =
= а/р Ф 0, а из второго — что у = 0 или х = b/q ф 0. Отсюда легко
следует, что эта система хищник-жертва имеет следующие две точки
равновесия: @,0) и (b/q, а/р).
Точка равновесия @,0). Матрица Якоби системы A) имеет вид
3(х,у)
а — ру —рх
Я.У -Ъ + qx
так что J@,0)
а 0
0 -Ъ
. C)
Матрица J@,0) имеет характеристическое уравнение (а — Л)(—b — А) =
= 0 и собственные значения Ai = а > 0, Аг = — b < 0 с различными
знаками. Следовательно, из теорем 1 и 2 раздела 6.2 следует, что точка
равновесия @,0) является неустойчивой седловой точкой, причем для обеих
систем — исходной системы хищник-жертва и ее линеаризации в начале
координат @,0). Соответствующее равновесное решение x(t) = 0, y(t) =
= 0 просто описывает одновременное исчезновение популяций жертвы
(добычи) (ее численность обозначена через х) и хищника (численность
которого обозначена через у).
6.3. Экологические модели: хищники и конкуренты 551
Точка равновесия (b/q, а/р). Матрица Якоби
J(b/q,a/p)
О -£-
aq
Р
рЬ
Q
О
D)
имеет характеристическое уравнение А2 + ф = 0 и чисто мнимые
собственные; значения Ai, A2 = ±i\fab. Следовдтельно? из теоремы 1
раздела 6.2 следует, что линеаризация системы хищник-жертва в точке
(b/q, а/р) имеет устойчивый центр в начале координат. Таким образом,
мы имеем неопределенный случай в теореме 2 раздела 6.2, когда точка
равновесия может (кроме устойчивого центра) также быть или устойчивым
спиральным стоком (устойчивым фокусом), или неустойчивым
спиральным источником (неустойчивым фокусом) для самой системы хищник-
жертва. Следовательно, дальнейшее исследование обязано определить
фактическую природу точки равновесия (b/q,a/p). Соответствующее
равновесное решение x(t) = b/q, y(t) = а/р описывает единственно
возможные постоянные отличные от нуля численности популяций жертвы
(х) и хищника (у), которые могут сосуществовать сколь угодно долго.
Фазовый портрет. В задаче 1 мы просим вас провести численный
анализ типичной системы хищник-жертва и проверить, что ее
линеаризации в ее двух критических точках качественно согласуются с фазовым
портретом, приведенным на рис. 6.3.1, на котором видна нетривиальная
точка равновесия, которая, как кажется визуально, является устойчивым
центром. Конечно, только первый квадрант этого портрета соответствует
Рис. 6.3.1. Фазовый портрет системы хищник-жертва х[ = 200ж
— 4ху, у' = — 150у + 2ху с критическими точками @,0) и G5,50)
552 Глава 6. Нелинейные системы и явления
Пример 2
физически значимым решениям, описывающим неотрицательные
численности популяций жертвы (добычи) и хищника.
В задаче 2 мы просим вас найти точное неявное решение системы
хищник-жертва, приведенной на рис. 6.3.1, — решение, которое может
использоваться для того, чтобы показать, что его траектории на фазовой
плоскости в первом квадранте действительно представляют собой
простые замкнутые кривые, внутри которых находится критическая точка
G5,50), какипоказанонарисунке.ТогдаиззадачиЗОвразделеб.1 следует,
что обе точные функции-решения x(t) и y(t) являются периодическими
функциями переменной t9 а это как раз и дает объяснение периодических
флуктуации, которые наблюдаются опытным путем в популяциях жертвы
(добычи) и хищника. ■
Колебания численности популяций. На рис. 6.3.2 показано машинно-
генерируемое поле направлений и фазовый портрет системы хищник-
жертва
dx
— = @,2)s - @,005)х2/ = @,005)хD0 - у),
^ = -@,5J/ + @,01)яу = @,01)г/(-50 + х),
где x(t) обозначает количество кроликов и y(t) — количество лис после t
месяцев. Очевидно, точка равновесия E0,40) —устойчивый центр,
представляющий равновесные популяции численностью 50 кроликов и 40 лис.
Любая другая начальная точка находится на замкнутой траектории,
содержащей внутри себя эту точку равновесия. Поле направлений показывает,
что точка (х (t), у (t)) движется по своей траектории против часовой
стрелки, а численности популяций кроликов и лис совершают периодические
колебания между их отдельными максимальными и минимальными
значениями. Недостаток состоит в том, что чертеж на фазовой плоскости не
содержит информации о скорости, с которой точка движется по каждой
из траекторий.
Это утраченное чувство времени можно возвратить, если для каждой
популяции начертить отдельный график функции, представляющей
собой численность соответствующей популяции, в зависимости от времени,
т. е. представить численность соответствующей популяции как функцию
времени t. На рис. 6.3.3 мы имеем приблизительные графики функций-
решений x(t) и y(t), рассчитанные по методу Рунге-Кутта из раздела 4.3
при начальных значениях х@) = 70 и у@) = 40. Мы видим, что
численность популяции кроликов колеблется между экстремумами хтак « 72
и хт{п « 33, в то время как численность популяции лис колеблется (не в
фазе, т. е. ее фаза не совпадает) между экстремумами утах « 70 и ут{п « 20.
Тщательные измерения показывают, что период Р колебаний каждой
численности популяции немного превышает 20 месяцев. Чтобы уточнить эти
оценки периода и максимального и минимального значений численности
6.3. Экологические модели: хищники и конкуренты 553
200h
s
В
>ч
50 100 150 200
х (жертва, добыча)
Рис. 6.3.2. Фазовый портрет
системы хищник-жертва из примера 2
0 10 20 30 40 50 60 70 80
t
Рис. 6.3.3. Периодические
колебания численности
популяций хищника и жертвы
(добычи) в примере 2
популяций кроликов и лис, можно увеличить масштаб в точках максимума
и минимума на каждом графике.
, Любые положительные значения в начальных условиях я0 = ж@)
и г/о = 2/@) дают подобную картину, так что обе популяции — лис и
кроликов — выживают в сосуществовании друг с другом. ■
Конкурирующие виды
Теперь мы рассматрим два вида (например, животных, растений или бактерий), которые
конкурируют друг с другом за продовольствие, доступное в их общей среде. Численности
их популяций в момент времени t обозначим через x(t) ny(t). Этот случай существенно
отличается от случая, в котором один вид охотится на другой. Чтобы создать
математическую модель, которая является настолько реалистической, насколько это возможно, давайте
предположим, что в отсутствии любых других видов, данный вид имел бы ограниченную
[логистическим уравнением] численность популяции подобно тем видам, которые были
рассмотрены в разделе 2.1. В отсутствии любого взаимодействия или, соревнования
(конкуренции) между двумя видами, численности их популяций x(t) и y(t) удовлетворяли бы
дифференциальным уравнениям
dx
~dt
dy
Tt=a2V
= a\x — b\x ,
hy\
F)
каждое из которых имеет вид уравнения B) из раздела 2.1. Но кроме того мы предполагаем,
что конкуренция (соревнование) влияет на скорость снижения численности каждой
популяции, которая пропорциональна произведению их численностей ху. Мы вставляем такие
слагаемые с отрицательными коэффициентами пропорциональности — с\ и — сг в уравне-
554 Глава 6. Нелинейные системы и явления
ния F), чтобы получить систему, описывающую конкуренцию (соревнование)
а\х — Ъ\х2 — с\ху = x(ai — Ь\х — с\у),
G)
а2у ~ Ь2у2 - с2ху = у(а2 - Ь2у - с2х),
где все коэффициенты а±9 а2, Ь±9 Ь2, с\ с2 положительны.
Почти линейная система G) имеет четыре точки равновесия. После приравнивания
правых частей этих двух уравнений нулю, мы видим, что если х = 0, то или у = О, или
у = а2/Ь2,тог№ткеслиу = 0, то или х = О, или х = а\/Ь\. Это дает три точки равновесия
@,0), @, а2/Ь2) и (ai/bi, 0). Четвертая точка равновесия получается в результате решения
системы уравнений
bix + ciy = ax, Ъ2х + с2у = а2. (8)
Мы предполагаем, что, как и в самых интересных приложениях, эти уравнения имеют
единственное решение и что соответствующая точка равновесия находится в первом квадранте
плоскости ху. Тогда эта точка (хЕ, уЕ) — четвертая точка равновесия системы G), причем
именно она представляет возможность сосуществования двух видов с постоянными
отличными от нуля равновесными численностями прпудяций x(t) = хЕ и y(t) = уЕ.
Мы интересуемся устойчивостью точки равновесия (хЕ ,уЕ). Это, оказывается, зависит
от того, какое из неравенств выполняется:
с\с2 < &1&2 или с\с2 >Ь\Ь2. (9)
Каждое неравенство в (9) имеет естественную интерпретацию. Исследуя уравнения в
системе F), мы видим, что коэффициенты Ь\ и Ь2 оказывают задерживающее влияние на рост
численности каждой популяции (возможно, из-за ограничености запасов продовольствия
или пространства). С другой стороны, с\ и с2 представляют эффект конкуренции
(соревнования) между этими двумя популяциями. Таким образом, Ь\Ь2 — мера подавления, в то
время как с\с2 — мера конкуренции (соревнования). Общий анализ системы G) показывает
следующее.
1. Еслис1С2 < b\b29 так что конкуренция (соревнование) незначительна по сравнению
с подавлением, то (хЕ ,уЕ) — асимптотически устойчивая точка равновесия, к
которой приближается каждое решение при t —» +оо. Таким образом, оба вида могут
сосуществовать и действительно сосуществуют в этом случае.
2. Если с\с2 > &i&2> так что конкуренция (соревнование) доминирует по сравнению
с подавлением, то (хЕ ,уЕ)~ неустойчивая точка равновесия, и либо x(t), либо y(t)
стремится к нулю при t —► +оо. Таким образом, два вида не могут сосуществовать
в этом случае; один из них выживает, а другой вымирает.
Вместо того чтобы детально проделать этрт общий анализ, мы представим два примера,
которые иллюстрируют данные две возможности.
dy
dt
6.3. Экологические модели: хищники и конкуренты 555
Выживание отдельного вида. Предположим, что численности
популяций x(t) и y(t) удовлетворяют уравнениям
dx
И
dt
= 14х — \х2 — ху,
A0)
16у - ±у - ху,
в которых а\ = 14, а^ — 16, Ь\ = &2 = \> и с\ — сч — 1. Тогда с\Сч =
= 1 > \ = 6i629 так что мы должны ожидать выживание одного вида
в соответствии с предсказанием в случае 2. Мы легко находим следующие
четыре точки равновесия: @,0), @,32), B8,0) и A2,8). Мы исследуем
их отдельно.
Точка равновесия @, 0). Матрица Якоби системы A0) имеет вид
J(x,y) =
14-я-
-у
—х
16 — у — х
, так что J @,0) =
14 0
0 16
(П)
Матрица J@,0) имеет характеристическое уравнение A4 — А)A6 — А) =
= 0. Решая это характеристическое уравнение, находим собственные
значения матрицы
Aj = 14, которому соответствует собственный вектор vi = [ 1 0] ,
Аг ~ 16, которому соответствует собственный вектор V2 = [0 1 ]
Поскольку оба собственных значения положительны, то @,0)—неустой-
' чивый узел (источник) для линеаризации системы х' = 14ж, у' = 16г/
в начале координат @,0) и, следовательно,—по теореме 2 из раздела 6.2—
является также неустойчивым узлом (источником) для первоначальной
системы A0). Нарис. 6.3.4 показан фазовый портрет для линеаризованной
системы в окрестности начала координат @,0).
Точка равновесия @,32). Матрица Якоби
J@,32) =
-18 0
-32 -16
A2)
соответствует линеаризации
du
А = -18U'
dv
— = -32г* - 16v
at
A3)
556 Глава 6. Нелинейные системы и явления
системы A0) в окрестности точки @,32). Матрица J@,32) имеет
характеристическое уравнение(—18 — А)(—16-- А) = 0. Решая это
характеристическое уравнение, находим собственные значения матрицы Ai = —18,
которому соответствует собственный вектор Vi = [ 1 16 ] ,и А2 = —16,
которому соответствует собственный вектор V2 = [ 0 1 ] . Поскольку
оба собственных значения отрицательны, начало координат @,0)— узел-
сток для линеаризованной системы, и, следовательно, — по теореме 2 из
раздела 6.2—точка @,32) является также устойчивым узлом (стоком) для
первоначальной системы A0). На рис. 6.3.5 показан фазовый портрет для
линеаризованной системы в окрестности начала координат @,0).
Рис. 6.3.4. Фазовый портрет
линейной системы х' = 14#,
у1 = 16г/ в окрестности
критической точки @,0)
Рис. 6.3.5. Фазовый
портрет линейной системы
уравнений A3) в окрестности
критической точки @,32)
Точка равновесия B8, 0). Матрица Якоби
JB8,0) =
-14
0
28
12
соответствует линеаризации
— = —14^
dt
dv
— = -12v
dt
28v,
A4)
A5)
системы A0) в окрестности точки B8,0). Матрица JB8,0) имеет
характеристическое уравнение (—14 — А) (—12 — А) = 0. Решая это
характеристическое уравнение, находим собственные значения матрицы Ai = —14,
которому соответствует собственный вектор vi = [ 1 0 ] , и А2 =
= —12, которому соответствует собственный вектор V2 = [ —14 1 ] .
Поскольку оба собственных значения отрицательны, начало координат
@,0) представляет собой узел-сток для линеаризованной системы и,
следовательно, — по теореме 2 из раздела 6.2 — точка B8,0) является также
устойчивым узлом-стоком для первоначальной нелинейной системы A0).
6.3. Экологические модели: хищники и конкуренты 557
На рис. 6.3.6 показан фазовый портрет для линеаризованной системы
в окрестности начала координат @,0).
Точка равновесия A2, 8). Матрица Якоби
JA2,8)
соответствует линеаризации
-6 -12
-8 -4
A6)
du
— = -6tx - 12v,
at
A7)
dv
— = — gu — 4v
at
системы A0) в точке A2,8). Матрица J A2,8) имеет характеристическое
уравнение
(-6, - Л)(-4 - Л) - (-8)(-12) = А2 + ЮЛ - 72 = 0.
Решая это характеристическое уравнение, находим собственные значения
матрицы
Ах =--5 - л/97 < 0,
которому соответствует собственный вектор vi = [ |A + \/97) 1 ] ,и
А2 = -5 4- >/97 > 0,
которому соответствует собственный вектор V2 = [ |A — \/97) 1 ] •
Поскольку эти два собственных значения имеют противоположные
знаки, то @,0) — седловая точка для линеаризованной системы и,
следовательно, — по теореме 2 раздела 6.2 — особая точка A2,8) является
также неустойчивой седловой точкой для первоначальной системы A0).
На рис. 6.3.7 показан фазовый портрет для линеаризованной системы
в окрестности начала координат @,0).
Теперь, когда наш локальный анализ каждой из этих четырех точек
равновесия закончен, остается лишь собрать найденную информацию,
чтобы уяснить глобальную картину. Если мы принимаем как факт, что
• в окрестности каждой точки равновесия траектории
первоначальной системы A0) напоминают качественно траектории
линеаризированной системы, показанные на рис. 6.3.4-6.3.7, и
• при t —► +оо каждая траектория или приближается к критической
точке, или убегает от нее к бесконечности,
то оказывается, что фазовый портрет для первоначальной системы
должен напоминать грубый эскиз, приведенный на рис. 6.3.8. На этом эскизе
вручную вычерчено несколько типичных траекторий, соединяющих узел-
558 Глава 6. Нешмей^ы^шстщщ* и явления п
Рис. 6.3.6. Фазовый портрет Рис. 6.3.7. Фазовый порт-
для линейной системы урав- рет линейной системы уравне-
нений A5) в окрестности кри- ний A7) в окрестности крити-
тической точки B8,0) ческой точки A2,8)
источник в начале координат @,0), узлы-стоки в точках @,32) и B8,0)
и седловую точку с координатами A2,8), причем указаны направления
движения по этим траекториям в соответствии с известной природой
(характером) $тих точек равновесия. На рис. 6.3.9 приведены более
точный, созданный компьютером, фазовый портрет и поле направлений для
нелинейной системы A0).
Две траектории, которые приближаются к седловой точке A2,8),
вместе с самой седловой точкой образуют сепаратрису, которая отделяет
области I й II на рис. 6.3.9». Она играет 1фйтйческую роль в определении
поведения этих двух популяций на протяжении длительного периода
времени. Если начальная точка (хо, у о) находится точно на сепаратрисе, то
(x(i),y(i)) стремится к A2,8) при t —► +оо. (Конечно, случайные
события делают это чрезвычайно невероятным, так что едва ли (ж(£), y{t))
останется на сепаратрисе.) В противном случае мирное сосуществование
двух видов невозможно. Если (xq , г/о) находится в области I выше сепара-
Рис. 6.3.8. Грубый эскиз, по- Рис. 6цЭ|.9. Фазовый портрет
строенный в соответстэии с ана- системы в примере 3
лизом в примере 3
6.3. Экологические модели: хищники и конкуренты 559
трисы,то (#(£), з/(£))стремитсяк @,32)при£ —► +оо,такчто численность
популяции x(t) уменьшается до нуля. Альтернативно, если (#о, У о)
находится в области II ниже сепаратрисы, то (ж(£), y(t)) стремитсякB8,0) при
t —► Ч-оо, так что к нулю стремится численность популяции y(t) и выми-
раетэта популяция. Короче говоря, какой бы ни была численность
популяции, выживает та популяция, которая имеет в самом начале преимущество
в конкурентной борьбе, а другая популяция обречена на исчезновение. ■
Мирное сосуществование двух видов. Предположим, что
численности популяций x(t) и y(t) удовлетворяют системе уравнений,
моделирующих конкуренцию (соревнование)
dx о
— = Ых — 2х — ху,
ах
4-1*-*
A8)
■яу,
в которой а\ = 14, й2 = 16, bi = &2 = 2 и ci = С2 = 1. Тогда с\С2 =
= 1 < 4 = 6162, так что теперь эффект подавления превалирует над
конкуренцией (соревнованием). Мы легко находим следующие четыре
точки равновесия: @,0), @,8), G,0) и D,6). Мы продолжаем так же, как
это делали в примере 3.
Точка равновесия @, 0). Если опустить квадратичные слагаемые
в A8), в начале координат @,0) мы получим ту же самую линеаризацию
х' = 14ж,у' = 16у, что и в примере 3. Таким образом, матрица
коэффициентов линеаризованной системы имеет два положительных собственных
значения Ai = 14 и Аг = 16, а ее фазовый портрет имеет тот же самый
вид, что инарис. 6.3.3. Поэтому @,0) —неустойчивый узел-источник для
первоначальной системы A8).
Точка равновесия @, 8). Матрица Якоби системы A8) имеет вид
3(х,у) =
J@,8) =
14 — 4ж — у —х
—у 16 — Ау — х
6 0
так что
A9)
-8 -16
Матрица J@,8) соответствует линеаризации
du
^ = -8ч-Ш
dt
системы A8) в точке @,8). Она имеет характеристическое уравнение
F — А) (—16 — А) = 0. Решая это характеристическое уравнение,
находим положительное собственное значение матрицы Ai = 6, которому
.B0)
560 Глава 6. Нелинейные системы и явления
соответствует собственный вектор vi = [11 —4 ] , и отрицательное
собственное значение матрицы Аг = —16, которому соответствует
собственный вектор V2 = [ 0 1 ] .Из этого следует, что начало координат
@,0) представляет собой седловую точку для линеаризованной системы
и, следовательно, начало координат @,8) является неустойчивой сед-
ловой точкой для первоначальной системы A8). На рис. 6.3.10 показан
фазовый портрет для линеаризованной системы в окрестности начала
координат @,0).
Точка равновесия G, 0). Матрица Якоби
JG,0) =
-14
0
B1)
соответствует линеаризации
du
— = -Ый- 7v,
at
dv
Tt=9v
B2)
системы A8) в точке G,0). Матрица JG,0) имеет характеристическое
уравнение (—14 — А) (9 — А) = 0 и имеет отрицательное собственное
значение Ai = —14, которому соответствует собственный вектор vi =
= [ 1 0 ] и положительное собственное значение Аг = 9, которому
соответствует собственный вектор V2 = [-7 23] .Из этого следует,
что @,0) — седловая точка для линеаризованной системы, и,
следовательно, что точка G,0) является неустойчивой седловой точкой для
первоначальной системы A8). На рис. 6.3.11 показан фазовый портрет для
линеаризованной системы в окрестности начала координат @,0).
-lb
Рис. 6.3.10. Фазовый
портрет линейной системы
уравнений B0) в окрестности
критической точки @,8)
Рис. 6.3.11. Фазовый
портрет линейной системы
уравнений B2) в окрестности
критической точки G,0)
6.3. Экологические модели: хищники и конкуренты 561
1,6) =
i
du
~di~~
dv
~dt~~
-8 -4
-6 -12
-Su — 4v,
-6u — Ylv
Точка равновесия D, 6). Матрица Якоби
_ 1 B3)
соответствует линеаризации
B4)
системы A8) в точке D,6). Матрица JD,6) имеет характеристическое
уравнение
(-8 - А)(-12 - Л) - (-6)(-4) = Л2 + 20Л + 72 = О
и имеет два отрицательных собственных значения
Ai=2(-5->/7),
KoropoMycooTBeTCTByeTCo6cTBeHHHiiBeKTopvi = [ |(—1 + \/7 ) l] >и
X2 = 2(-5 + V7),
которому соответствует собственный вектор V2 = [ |(—1 — \/7) 1 ] •
Из этого следует, что начало координат @,0) представляет собой
узел-сток для линеаризованной системы и, следовательно, точка D,6)
является устойчивым узлом-стоком для первоначальной системы A8).
На рис. 6.3.12 показан фазовый портрет для линеаризованной системы
в окрестности начала координат @,0).
На рис. 6.3.13 собрана вся эта локальную информация и
представлен глобальный фазовый портрет для первоначальной системы A8).
Известная особенность этой системы состоит в том, что для любых
положительных значений начальных численностеи популяций хо и уо точка
(x(t), y(t)) приближается к единственной критической точке D,6) при
t —> +оо. Из этого следует, что оба вида выживают в устойчивом
(мирном) сосуществовании. ■
Взаимодействие логистических популяций
Если коэффициенты а±, а,2, Ьь &2 положительны, но с\ = с2 = 0, то уравнения
dx . о
— = а\х - Ь\х - сгху,
at
B5)
dy -2
— =а2у- b2y - с2ху
562 Глава 6. Нелинейные системы и явления
Рис. 6.3.12. Фазовый порт- Рис 6.3.13* Поле направлений и фазо-
рет линейной системы уравне- вый портрет системы х' = Ых - 2х2 -
ний B4) в окрестности крити- _ ху^ у' = \Qy _ 2у2 - Ху, описывающей
ческой точки D,6) конкуренцию видов из примера 4
описывают две различные логистические популяции с численностями x(t) ny(t), которые
никак не влияют друг на друга. Примеры 3 и 4 иллюстрируют случаи, в которых оба
коэффициента с\ и С2 при ху положительны. Взаимодействие между этими двумя популяциями
тогда классифицируется как конкуренция (соревнование), потому что влияние слагаемых,
содержащих ху, в B5) направлено на уменьшение скорости прироста обеих популяций, т. е.
численность каждой популяции уменьшается в результате их взаимного взаимодействия.
Предположим, однако, что оба коэффициента взаимодействия с\ и С2 в B5)
отрицательны. Тогда благодаря слагаемым, содержащим ху9 увеличиваются скорости прироста
обеих популяций, т. е. каждая из популяций выигрываем от их взаимного взаимодействия.
Несомненно, этот тип взаимодействия следует квалифицировать как сотрудничество между
двумя логистическими популяциями.
Наконец, взаимодействие между двумя популяциями относится к хищничеству, если
коэффициенты взаимодействия имеют различные знаки. Например, если с\ > 0, но с<ь < О,
то при взаимодействии популяция, численность которой обозначена через х, страдает, а
популяция, численность которой обозначена через у, наоборот, выигрывает от такого
взаимодействия. Поэтому можно рассматривать x(t) как численность популяции жертвы (добычи),
a y(t) — как численность популяции хищника.
Если Ь\ или &2 равно нулю в B5), то численность соответствующей популяции (в
отсутствии другой) возрастает по экспоненте, а не по логистическому закону. Например,
предположим, что а\ > 0, с&2 < 0, 61=62 = 0, причем с\ > О, С2 < 0. Тогда x(t) — растущая по
экспоненциальному закону численность популяции жертвы (добычи), в то время как y(t) —
снижающаяся по экспоненте численность популяции хищника. Это — первоначальная
модель хищник-жертва, с рассмотрения которой мы начали этот раздел.
Задачи 26-34 иллюстрируют разнообразие указанных здесь возможностей. Задачи и
примеры в этом разделе иллюстрируют мощь элементарного анализа точки равновесия. Но
помните, что экологические системы в природе редко столь просты, как в этих примерах.
Часто они включают больше, чем два вида, причем скорости роста этих популяций, да и
взаимодействия между ними часто более сложны, чем те, которые обсуждались в этом разделе.
Следовательно, математическое моделирование экологических систем остается именно той
областью, в которой активно ведутся научные исследования.
6.3. Экологические модели: хищники и конкуренты 563
6.3» Задачи
В задачах 1 и 2 рассматривается система хищник-жертва
A)
— = 200ж - 4ху,
at
^ = -150у + 2хУ1
которой соответствует рис. 6.3.1.
1. Рассмотрев сначала матрицу Якоби системы A), получите линеаризации данной системы в двух
критических точках @,0) и G5,50). С помощью графического калькулятора или компьютерной
системы создайте фазовые портреты для этих двух линеаризации, которые вполне согласуются
с глобальной картиной, приведенной на рис. 6.3.1.
2. Отделите переменные в частном
dy _ — 150у Ч- 2ху
dx 200ж — Аху
двух уравнений системы A) и таким образом получите точное неявное решение
200 In у + 1501пх - 2х - 4у = С
данной системы. Используйте графический калькулятор или компьютерную систему (точнее ее
возможности для вычерчивания контурных графиков (линий уровня)) и вычертите линии уровня
этого уравнения, проходящие через точки G5,100), G5,150), G5,200), G5,250) и G5,300)
в плоскости ху. Действительно ли ваши результаты согласуются с рис. 6.3.1?
3. Пусть x(t) — численность популяции вредных насекомых (например, тлей), которая в
естественных условиях находится под мягким ("гуманным") контролем популяции насекомых-хищников
численностью y(t) (предположим, божьи коровки). Предположите, что x{t) и y{t)
удовлетворяют уравнениям системы хищник-жертва A), так что популяции находятся в состоянии
устойчивого равновесия хЕ = b/q и уЕ = а/р. Теперь предположите, что используется инсектицид,
который подавляет (в единицу времени) ту же самую часть f < а каждого вида насекомых.
Покажите, что численность популяции вредных насекомых хЕ увеличится, в то время как
численность популяции уЕ мягких (гуманных) хищников уменьшится, так что использование
инсектицида приводит к нежелательному эффекту (практически противоположному тому,
который ожидается). Это случай, в котором математический анализ показывает нежелательные
последствия полного благих намерений вмешательства в природу.
В задачах 4-7 рассматривается система конкуренции (соревнования)
dx 2
— = 60# — Ах — Зху,
at
и B)
-jt=42y-2y2-3xy,
в которой с\С2 — 9 > 8 = Ъ\Ъъ, так что эффект конкуренции (соревнования) превалирует над
эффектом подавления. В задачах 4-7 подразумеваются, что следующие четыре точки равновесия
@,0), @,21), A5,0) и F,12) системы B) напоминают то, что показано на рис. 6.3.9 —узел-
источник в начале координат, узел-сток на каждой координатной оси и интерьер седловой точки
в первом квадранте. В каждой из этих задач с помощью графического калькулятора или
компьютерной системы начертите фазовый портрет линеаризации в указанной критической точке.
Наконец, начертите фазовый портрет нелинейной системы B) в первом квадранте. Согласуются
ли ваши локальные портреты с глобальным?
564 Глава 6. Нелинейные системы и явления
4. Покажите, что матрица коэффициентов линеаризации х' = 60х, у' = 42г/ системы B) в начале
координат @,0) имеет положительные собственные значения Ai = 60 и Лг = 42.
Следовательно, начало координат @,0) — узел-источник для системы B).
5. Покажите, что линеаризация системы B) в точке @,21) имеет вид и' = —Зге, v' = —63ге — 42г\
Затем покажите, что матрица коэффициентов этой линейной системы имеет отрицательные
собственные значения Ai = — 3 и Лг = —42. Следовательно, @,21) — узел-сток для системы B).
6. Покажите, что линеаризация системы B) в точке A5,0) имеет вид и'. = —60и — 45г>, г/ = —3v.
Затем покажите, что матрица коэффициентов этой линейной системы имеет отрицательные
собственные значения Ai = —60 и Аг = —3. Следовательно, A5,0) — узел-сток для системы B).
7. Покажите, что линеаризация системы B) в точке F,12) имеет вид и' = —24ге — 18г>, г/ =
= —Збге — 24г>. Затем покажите, что матрица коэффициентов этой линейной системы имеет
собственные значения Ai = —24 — 18\/2 < 0 и Аг = —24 -+- 18\/2 > 0. Следовательно,
F,12) — седловая точка для системы B).
В задачах 8-10 рассматривается система конкуренции (соревнования)
-£ =; вОх - Зх2 - Аху,
dt
a C)
g=422/-32/2-2a:2/,
в которой с\С2 = 8 < 9 = 6162, так что эффект подавления превалирует над эффектом
конкуренции (соревнования). Линеаризация системы C) в начале координат @,0) та же самая, что
и системы B). Из этого наблюдения и результатов задач 8-10 следует, что следующие четыре
точки равновесия @,0), @,14), B0,0) и A2,6) системы C) напоминают картину, вычерченную
на рис. 6.3.13: узел-источник в начале координат, седловая точка на каждой координатной оси
и интерьер узла-стока в первом квадранте. В каждой из этих задач с помощью графического
калькулятора или компьютерной системы начертите фазовый портрет линеаризации в
указанной критической точке. Наконец, начертите фазовый портрет нелинейной системы C) в первом
квадранте. Согласуются ли ваши локальные портреты с глобальным?
8. Покажите, что линеаризация системы C) в точке @,14) имеет вид и' = 4ге, г/ = — 28ге — 42г>.
Затем покажите, что матрица коэффициентов этой линейной системы имеет положительное
собственное значение Ai = 4 и отрицательное собственное значение Аг = —42. Следовательно,
@,14) — седловая точка для системы C).
9. Покажите, что линеаризация системы C) в точке B0,0) имеет вид и' — —60ге — 80г>, v' = 2v.
Затем покажите, что матрица коэффициентов этой линейной системы имеет отрицательное
собственное значение Ai = —60 и положительное собственное значение Аг = 2. Следовательно,
B0,0) — седловая точка для системы C).
10. Покажите, что линеаризация системы C) в точке A2,6) имеет вид и' = — Збге — 48г>, г/ =
= — \2и — 18г\ Затем покажите, что матрица коэффициентов этой линейной системы имеет
собственные значения Ai = —27 -+- 3\/73 и Аг = —27 — 3\/73, причем они оба отрицательны.
Следовательно, A2,6) — узел-сток для системы C).
В задачах 11-13 рассматривается система хищник-жертва
dx 2
— = Ъх - х -хуу
D)
^ = -2y + xy,
в которой численность популяции жертвы (добычи) x{t) подчиняется логистическому закону,
а численность популяции хищника y(t) в отсутствии любой жертвы (добычи) убывала бы по
6.3. Экологические модели: хищйиким конкуренты 565
экспоненциальному закону. В задачах 11-13 подразумевается, что следующие три точки
равновесия @,0), E,0) и B,3) системы D) располоэюены так, как показано на рис. 6.3.14 — седловые
почки в начале координат и на положительной полуоси х, а внутри первого квадранта находится
спиральный сток (устойчивый фокус). В каждой из этих задач с помощью графического кальку-
штора или компьютерной системы вычертите фазовый портрет для линеаризации в указанной
критической точке. Согласуются ли ваши локальные портреты с рис. 6.3.14%
II ц—1> ,».-а^,-ч' ' ;—v ' " ' ' 1
ri?!
4^. *- f- <=J
^E,0).
Рис. 6.3.14. Поле направлений и
фазовый портрет системы хищник-жертва
в задачах 11-13
11. Покажите, что матрица коэффициентов линеаризации х' = Ъх, у' = —2у системы D) в начале
координат @,0) имеет положительное собственное значение Ai = 5 и отрицательное
собственное значение Лг = —2. Следовательно, начало координат @,0) — седловая точка системы D).
12. Покажите, что линеаризация системы D) в E,0) имеет вид и' = —Ъи — 5v, v' — 3v. Затем
покажите, что матрица коэффициентов этой линейной системы имеет отрицательное
собственное значение Ai = — 5 и положительное собственное значение Аг = 3. Следовательно, E,0) —
седловая точка для системы D).
13. Покажите, что линеаризация системы D) в точке B,3) имеет вид и' = —2и — 2v, v' =
= Зи. Затем покажите, что матрица коэффициентов этой линейной системы имеет комплексно
сопряженные собственные значения АЬА2 = -l±iV$ с отрицательной вещественной частью.
Следовательно, B,3) — спиральный сток (устойчивый фокус) для системы D).
В задачах 14-17 рассматривается система хищник-жертва '
dx 2 о
— = х -2х-ху,
dV 2 Л ,
— = у -4у + ху.
E)
Здесь численность каждой популяции — численность популяции жертвы (добычи) x(t) и
численность популяции хищника y(t) — подчиняется бесхитростным законам роста (или убывания)
численности популяции (подобно численности популяции аллигаторов в разделе 2.1), для которой
(в отсутствие других популяций) единственно возможными альтернативами являются Судный
Лень и исчезновение. В задачах 14-17 подразумевается, что следующие четыре точки равновесия
@,0), @,4), B,0) и C,1) системы E) располоэюены так, как показано на рис. 6.3.15: узел-
сток в начале координат, седловая точка на каждой координатной оси и спиральный источник
(неустойчивый фокус) внутри первого квадранта. Это двумерная версия "Судного Дня против
566 Глава 6. Нелинейные системы и явления
исчезновения". Если начальная точка (хо,уо) находится в Области I, то численность обеих
популяций увеличивается неограниченно (до Судного Дня), тогда как, если она находится в Области
II, то численность обеих популяций уменьшается до нуля (и, таким образом, оба вида
вымирают). В каждой из этих задач с помощью графического калькулятора или компьютерной системы
вычертите фазовый портрет для линеаризации в указанной критической точке. Согласуются ли
ваши локальные портреты с рис. 6.3.15?
6
@,4)ч
v 4
;\
2
0
•
Область I
\ Ч Ч \\£ \\\ ^ \\ X
^ \\ \\ \\Л \\ \ Т|
*\* ^ "СЧД \ V\4 \ t!
^-«^,,,w^S^V V \ 1 J 1 L
1 */* ^K/f* T*5*-»*^ -* -»
itra*r*r
Область О
II
2 4
x
Рис. 6.3.15. Поле направлений и
фазовый портрет системы хищник-жертва
в задачах 14-17
—4гу системы E) в начале
-2 и Лг = —4. Следова-
14. Покажите, что матрица коэффициентов линеаризации х' = —2х, у'
координат @,0) имеет отрицательные собственные значения Ai
тельно, начало координат @,0) — узел-сток для системы E).
15. Покажите, что линеаризация системы E) в точке @,4) имеет вид и' = — 6и, г/ = Au 4- 4г>.
Затем покажите, что матрица коэффициентов этой линейной системы имеет отрицательное
собственное значение Ai = —6 и положительное собственное значение Аг = 4. Следовательно,
@,4) — седловая точка для системы E).
16. Покажите, что линеаризация системы E) в точке B,0) имеет вид и' = 2и — 2v, v' — —2v.
Затем покажите, что матрица коэффициентов этой линейной системы имеет положительное
собственное значение Ai = 2 и отрицательное собственное значение А 2 = —2. Следовательнр,
B,0) — седловая точка системы E).
17. Покажите, что линеаризация системы E) в точке C,1) имеет вид и' = Зге — Зг>, v' = и +
+ v. Затем покажите, что матрица коэффициентов этой линейной системы имеет комплексно
сопряженные собственные значения Ai, Аг = 2 ± iy/2 с положительной вещественной частью.
Следовательно, C,1) — спиральный источник (неустойчивый фокус) для системы E).
В задачах 18-25 рассматривается система хищник-жертва
dx _ , ч
— = 2х - ху -+- ехE - х),
— = -5у + ху,
F)
для которой бифуркация (раздвоение) происходит при значении е == 0 параметра е. В задачах 18-19
рассматривается случай е = 0, когда система (б) принимает вид
dx
It
2х — ху,
dt
— —Ъх + ху,
G)
6.3. Экологические модели: хищники и конкуренты 567
причем в этих задачах предполагается, что две точки равновесия @,0) и E,2) системы G)
расположены так, как показано на рис. 6.3.16: свдловая точка в начале координат и центр в точке
E,2). В каждой из задач с помощью графического калькулятора или компьютерной системы
начертите фазовый портрет линеаризации в указанной критической точке. Согласуются ли ваши
локальные портреты с рис. 6.3.16?
Рис. 6.3.16. Случай б = 0
(задачи 18 и 19)
18. Покажите, что матрица коэффициентов линеаризации х' = 2х, у' = — Ъу системы G) в
начале координат @,0) имеет положительное собственное значение Ai = 2 и отрицательное
собственное значение Лг = —5. Следовательно, начало координат @,0) — седловая точка для
системы G).
19. Покажите, что линеаризация системы G) в точке E,2) имеет вид v! = — 5г>, г/ = 2гг. Затем
покажите, что матрица коэффициентов этой линейной системы имеет сопряженные мнимые
собственные значения Ai, Аг = ±г\/10. Следовательно, начало координат @,0) —
устойчивый центр линейной системы. Хотя это неопределенный случай теоремы 2 из раздела 6.2, из
рис. 6.3.16 видно, что E,2) — также устойчивый центр для системы G).
В задачах 20-22 рассматривается случай е — — 1, для которого система F) принимает вид
dx 2 dy
— = -Зх + х -ху, — = -Ъу + ху,
(8)
причем ее три точки равновесия @,0), C,0) и E,2) расположены так, как показано на рис. 6.3.17:
узел-сток в начале координат, седловая точка на положительной полуоси х и спиральный источник
(неустойчивый фокус) в точке E,2). В каждой задаче с помощью графического калькулятора или
компьютерной системы начертите фазовый портрет для линеаризации в указанной критической
точке. Согласуются ли ваши локальные портреты с рис. 6.3.17?
20. Покажите, что матрица коэффициентов линеаризации х' = — Зх, у' = —Ъу системы (8) в начале
координат @,0) имеет отрицательные собственные значения Ai = — 3 и Аг = — 5.
Следовательно, начало координат @,0) — узел-сток для системы (8).
21. Покажите, что линеаризация системы (8) в C,0) имеет вид и' — Зи — 3v, г/ = — 2v. Затем
покажите, что матрица коэффициентов этой линейной системы имеет положительное
собственное значение Ai = 3 и отрицательное собственное значение Аг = —2. Следовательно, C,0) —
седловая точка для системы (8).
568 Глава 6. Нелинейные системы и явления
2 \4 6
C,0) х
Рис. 6.3.17. Случай е =
дачи 20-22)
-1(за-
22. Покажите, что линеаризация системы (8) в точке E,2) имеет вид и' = Ъи — Ъу, v' = 2и.
Затем покажите, что матрица коэффициентов этой линейной системы имеет комплексно
сопряженные собственные значения Ai, Л2 = \ E ± iy/Tb) с положительной вещественной частью.
Следовательно, E,2) — спиральный источник (неустойчивый фокус) для системы (8).
В задачах 23-25 рассматривается случай е = 1, так что система F) принимает вид
dx „ 2 dy _ ,
— = 7х - х - ху, — = -Ъу + ху,
(9)
причем из результатов этих задач следует, что три точки равновесия @,0), G,0) и E,2)
системы (9) расположены так, как показано на рис. 6.3.18: седловые точки в начале координат и на
положительной полуоси х и спиральный сток (устойчивый фокус) в точке E,2). В каждой задаче
с помощью графического калькулятора или компьютерной системы начертите фазовый
портрет для линеаризации в указанной критической точке. Согласуются ли ваши локальные портреты
с рис. 6.3.18?
т
4 6 \ 8
х G,0)
Рис. 6.3.18.
чи 23-25)
Случай б = +1 (зада-
23. Покажите, что матрица коэффициентов линеаризации х' = 7х, у' = — Ъу системы (9) в
начале координат @,0) имеет положительное собственное значение Ai = 7 и отрицательное
собственное значение Аг = —5. Следовательно, начало координат @,0) — седловая точка для
системы (9).
24. Покажите, что линеаризация системы (9) в точке G,0) имеет вид й' — —lu — 7v, v' = 2v.
Затем покажите, что матрица коэффициентов этой линейной системы имеет отрицательное
6.3. Экологические модели: хищники и конкуренты 569
собственное значение Ai = —7 и положительное собственное значение Аг = 2. Следовательно,
G,0) — седловая точка для системы (9).
15. Покажите, что линеаризация системы (9) в точке E,2) имеет вид и' = —Ьи — bv, v' = 2гг. Затем
покажите, что матрица коэффициентов этой линейной системы имеет комплексно сопряженные
собственные значения Ai, A2 = £(-5±«>/15) с отрицательными вещественными частями.
Следовательно, E,2) — спиральный сток (устойчивый фокус) для системы (9).
В задачах 26-34 для каждой системы с двумя популяциями сначала опишите тип популяций х
и у (подчиняется экспоненциальному закону или логистическому) и характер (природа) их
взаимодействия — конкуренция (соревнование), сотрудничество или хищничество. Затем найдите
и охарактеризуйте точки равновесия системы (укажите их тип и устойчивость). Определите,
при каких отличных от нуля х и у могут сосуществовать эти популяции? Наконец, создайте
фазовый портрет, который даст возможность описать длительное поведение этих двух популяций
в терминах начальных численностей этих популяций ж@) и у@).
26.
28.
30.
32.
33.
34.
dx
dx
dx
It
dx
It
dx
~di
dx
= 2x-
= 2xy
= 3x-
= 30ж
= 30ж
= 30ж
dy
xy' Tt =
~16X' A
x2 + 2ХУ<
- 3x2 + xy,
- 2x2 — xy,
- 2x2 - xy.
3y-xy
= Ay-xy
dy 1
Tt=lxy
s-*>
t=^
S=2^
27.
29.
31.
dx dy
--2xy-4x, --
dx 2 1
ш=.3х-х --xy,
dx 2 1
— = Зж-аГ - -xy,
at 4
= xy-3y
-j£ =4y- 2xy
dy 0
Tt=xy~2y
Ъу -f 4xi/
4y2 + 2xy
6.3. Приложение. Ваш собственный заповедник
живой природы
Вы имеете большой заповедник для сохранения живой природы, в который вы
первоначально поселили Fo лис и До кроликов 1 января 1999 года. Следующие дифференциальные
уравнения моделируют численность кроликов R{t) и лис F{t) спустя t месяцев:
^ = @,01)рЯ - @,0001)аД^,
at
dF
— = ~@,01)gF+ @,0001)W?F,
at
|дерид- две наибольшие цифры (причем р < q), а а и Ь — две наименьшие отличные от
нуля цифры (причем а < Ь) в номере вашего студенческого билета.
Численности лис и кроликов будут колебаться периодически, не в фазе (т. е. фазы
совпадать не будут) друг с другом (подобно функциям x(t) и y(t) на рис. 6.3.3).1Выберите ваши
йачальные численности лис Fo и кроликов Ro (примерно несколько сотен для каждого вида)
|ак, чтобы полученная интегральная кривая в плоскости RF была довольно эксцентричной
щмкнутой кривой. (Эксцентриситет легко увеличить, если начать с относительно брльщого
570 Глава 6. Нелинейные системы и явления
количества кроликов и небольшого количества лис — именно так естественно поступил бы
любой владелец заповедника для сохранения живой природы, потому что лисы охотятся на
кроликов.)
Ваша задача состоит в том, чтобы определить следующие параметры:
1) период колебания численности популяций кроликов и лис;
2) максимальные и минимальные численности кроликов и календарные даты, на которые
приходятся эти значения в первый раз;
3) максимальные и минимальные численности лис и календарные даты, на которые
приходятся эти значения в первый раз.
Используя программное обеспечение, которое может вычертить траектории на плоскости
RF, и интегральные кривые (зависимости R и F от t) так, как это сделано на рис. 6.3.2 и 6.3.3,
вы можете увеличить графики в окрестности точек, координаты которых представляют
собой искомые значения.
6.4. Нелинейные механические системы
)
Теперь мы применяем качественные методы разделов 6.1 и 6.2 к анализу простых
механических систем, подобных системе "материальная точка заданной массы на пружине",
показанной на рис. 6.4.1. Пусть га обозначает массу в подходящей системе единиц, а через
x(t) обозначим смещение материальной точки заданной массы в момент времени t от ее
положения равновесия (в котором пружина нерастянута). Ранее мы всегда предполагали, что
сила F(x)9 приложенная пружиной к материальной точке заданной массы, является
линейной фунющей от x:F(x) = — кх (закон Гука). В действительности, однако, каждая пружина
по своей природе фактически нелинейна (хотя бы даже и совсем незначительно). Кроме
того, пружины в некоторых автомобильных подвесных системах преднамеренно
разрабатываются так, чтобы они были нелинейными. В данном разделе мы особенно интересуемся
эффектами нелинейности.
Положение
равновесия
Рис. 6.4.1.
Материальная точка заданной
массы на пружине
Итак, теперь мы считаем силовую функцию F(x) нелинейной. Поскольку F@) = 0 в
положении равновесия х = 0, мы можем предположить, что F имеет разложение в степенной
ряд вида
> F(x) = -кх + ах2 + /Зх3 + • • • . A)
Мы полагаем к > 0, так что реакция пружины направлена напротив смещения, когда х
является достаточно маленьким. Если мы предполагаем также, что реакция пружины
симметрична относительно положительных и отрицательных смещений на то же самое расстояние,
6,4. Нелинейные механические системы 571
то F(—x) = — F(x), так что F — нечетная функция. В таком случае из этого следует, что
коэффициент при хп в уравнении A) равен нулю, если п четное, так что первый нелинейный
член — тот, который содержит х3.
Поэтому в качестве простой математической модели нелинейной пружины мы берем
► F(x)*=.T-kx + 0x\ B)
игнорируя в уравнении A) все слагаемые степени больше 3. Тогда уравнение движения
материальной точки заданной массы т примет вид
> тх" = -кх + @х3. C)
Фазовая плоскость скорость-положение
Если мы введем скорость
y{t)=x\t) D)
материальной точки заданной массы, полоэюение которой задает функция х (t), то мы сможем
перейти от уравнения C) к эквивалентной системе первого порядка
dx
= У,
E)
~Ж=У
т-у- = -кх + Cх3.
at
Если на фазовой плоскости скорость-положение начертить траекторию этой системы, то
чертеж будет иллюстрировать движение материальной точки заданной массы на пружине.
Мы можем решить систему явно и тем самым найти траектории этой системы. Для этого
запишем уравнение
dy dy/dt —кх + Cх3
dx dx/dt my
откуда получим уравнение
ту dy 4- (кх — fix3) dx = 0.
Последующее интегрирование позволяет получить уравнение типичной траектории в виде
\ту2 + \кх2 - \Cх4 = Е. F)
Мы пишем Е в качестве произвольной постоянной интегрирования, потому что КЕ =
= \ту2 — кинетическая энергия материальной точки заданной массы, движущейся со
скоростью 2/, и естественно определить
РЕ = \кх2 - \(ЗхА G)
как потенциальную энергию пружины. С учетом этого уравнение F) принимает вид КЕ 4-
+ РЕ = Е и, таким образом, выражает закон сохранения энергии для движения
материальной точки заданной массы на пружине без сопротивления (т. е. без демпфирования, без
трения).
Поведение материальной точки заданной массы зависит от знака нелинейного члена
3 уравнении B). Пружину называют
572 Глава 6. Нелинейные системы и явления
• жесткой, если /3 < О,
• мягкой (незакаленной), если C > О.
Мы рассматриваем эти два случая отдельно.
Колебания жесткой пружины. Если /3 < О, то второе уравнение в E) принимает вид
ту' = —х (\C\х2 f- к), так что единственная точка равновесия системы находится в начале
координат @,0). Каждая траектория ,
^ту2 + \kx2f \\f3\x* = Е > 0
(8)
представляет собой овальную замкнутую кривую, подобную показанным на рис. 6.4.2,
а потому начало координат @,0) представляет собой устойчивый центр. Поскольку
точка (х(£), y(t)) движется по траектории в направлении по часовой стрелке, положение x(t)
и скорость y(t) материальной точки заданной массы колеблется поочередно, как показано
на рис. 6.4.3. Материальная точка заданной массы движется направо (при увеличении х),
когда у > 0, и налево, когда у < 0. Таким образом, поведение материальной точки заданной
массы на нелинейной жесткой пружине напоминает качественно поведение материальной
точки заданной массы на линейной пружине при /? = 0 (как в примере 4 из раздела 6.1). Но
есть одно различие между линейными и нелинейными ситуациями: период Т — 2тг^/т/к
колебаний материальной точки заданной массы на линейной пружине не зависит от
начальных условий, а период колебаний материальной точки заданной массы на нелинейной
пружине зависит от начального положения х@) и начальной скорости у@) (подробности
см. в задачах 17-22).
4h
е 2
1°
и-2
-А
-'
Iff*.*
4 Т т г /\
4 Т т t,, ,
чт т trV.
' Т т t г *
г Т 1г t К!". ■
4 t t t ", .
4 t t t ^ .
4 t t t -, .
4 t t t * .
4 T t t , _
1 1
1 1
~VE = 36ф
-u^t-E = 4
-- *">E=1j
1 4 * N
f —
-6-4-20246
Положение
Рис. 6.4.2. Фазовый портрет
скорость-положение для
системы, состоящей из материальной
точки заданной массы,
закрепленной на жесткой пружине, при
т = к = 2иC = -4<0
~» 1 1 1 г
Скорость у
Рис. 6.4.3. Интегральные
кривые для положения и
скорости в случае системы, состоящей
из материальной точки заданной
массы, закрепленной на жесткой
пружине, при га = & = 2и/? =
= -4<0
Замечание. Уравнение для жесткой пружины тх" =,—кх — \/3\х3 эквивалентно
системе первого порядка
х =у, у
га
га
6.4. Нелинейные механические системы 573
с матрицей Якоби
3(х,у) =
О 1
к 3|/3|
]-х2 О
т т
, так что J@,0) =
—or
(как обычно, вводим обозначение к/т = и2). Последняя матрица имеет
характеристическое уравнение А2 + и2 = 0 и чисто мнимые собственные значения Аь А2 = ±uji. Таким
образом, линеаризованная система х' = у9у' = —ш2х имеет устойчивый центр в
критической точке @,0), как мы видели в примере 4 из раздела 6.1. Однако нелинейный кубический
член в дифференциальном уравнении повлиял на эллиптические траектории (показанные
на рис. 6.1.7) линейной системы и теперь они заменены более сплющенными овалами,
имеющими уравнение четвертой степени (они показаны на рис. 6.4.2). ■
Колебания мягкой пружины. Если /3 > 0, то второе уравнение системы E) принимает
вид ту' = х (fix2 — к). Поэтому, кроме критической точки @,0), система имеет еще две
точки равновесия (± у/к//3,0 J. Эти три точки равновесия соответствуют трем решениям,
для которых материальная точка заданной массы может остаться в покое, причем других
таких решений нет. Следующий пример иллюстрирует больший диапазон возможных типов
поведения материальной точки заданной массы на мягкой пружине.
Пример 1
При m = 1, fc = 4 и /? = 1 уравнение движения материальной точки
заданной массы примет вид
— +4Х-Х* = 0,
и уравнение F) даст траектории вида
iy2 + 2x2-ix4 = E
Найдя у из этого уравнения, получим
У
4х2 + \х2.
(9)
A0)
A0')
Мы можем выбрать фиксированное значение постоянной энергии Е
и вручную начертить траекторию, подобную одной из тех, что мы
видим на сгенерированном компьютером фазовом портрете в координатах
скорость-положение (рис. 6.4.4).
Различные типы траекторий на фазовой плоскости соответствуют
различнымзначениямэнергии-Б.Еслимыподставимх = ±у/к//3иу = 0
в F), мы получим значение энергии Е = fc2/D/3) = 4 (потому что к = 4
и /3 = 1), которое соответствует траекториям, которые пересекают ось
х в нетривиальных критических точках (—2,0) и B,0). Эти выделенные
траектории называют сепаратрисами, потому что они отделяют области
фазовой плоскости, в которых поведение траекторий разное.
Характер (природа) движения материальной точки заданной массы
определяется типом траектории, который в свою очередь
определяется начальными условиями. Простые замкнутые траектории, содержащие
574 Глава 6. Нелинейные системы и явления
'B,0)
Рис. 6.4.4. Фазовый портрет в
координатах скорость-положение для
системы, состоящей из материальной
точки заданной массы, закрепленной
на мягкой пружине, при т = 1, к = 4
и /3 = 1 > 0. Сепаратрисы выделены
Рис. 6.4.5. Интегральные кривые
положения и скорости для системы, состоящей из
материальной точки заданной массы,
закрепленной на мягкой пружине, при т — 1,
fc = 4,/3=l>0, и энергии Е = 8 —
достаточно большой, чтобы материальна*? точка
заданной массы приблизилась к началу
координат слева и удалилась от него вправо
внутри себя начало координат @,0) в области, ограниченной
сепаратрисами, соответствуют энергиям в диапазоне 0 < Е < 4. Эти замкнутые
траектории представляют периодические колебания материальной точки
заданной массы назад и вперед около точки равновесия х = 0.
Неограниченные траектории, лежащие в областях выше и ниже
сепаратрис, соответствуют значениям Е9 большим 4. Они представляют
движения, в которых материальная точка заданной массы приближается
к х = 0 с достаточно большой энергией, благодаря чему она проходит
через точку равновесия, к которой затем никогда не возвращается снова
(как показано на рис. 6.4.5).
Неограниченные незамнутые траектории справа и слева
соответствуют отрицательным значениям Е. Они представляют движения, в которых
материальная точка заданной массы первоначально направляется к
точке равновесия х — 0, но с энергией, недостаточной, чтобы достичь ее.
В некоторый момент материальная точка заданной массы полностью
изменяет направление и возвращается назад туда, откуда она пришла.
На рис. 6.4.4 видно, что точка равновесия @,0) — устойчивый центр,
тогда как точки равновесия (±2,0) напоминают седловые точки
эквивалентной системы первого порядка
х' = t/, у' = —4х -Ь х3
си)
с матрицей Якоби
J (ж, у) =
0 1
-4 + Зх2 0
6.4. Нелинейные механические системы 575
Чтобы подтвердить эти наблюдения обычным анализом точки
равновесия, мы сначала обращаем внимание на то, что матрица Якоби
J@,0) =
О 1
-4 О
в критической точке @,0) имеет характеристическое уравнение А2 + 4 =
= 0 и чисто мнимые собственные значения Ai, A2 = =Ь2г, что указывает
на устойчивый центр. Кроме того, матрицы Якоби
J(±2,0) =
0 1
8 0
соответствующие двум другим критическим точкам, имеют
характеристическое уравнение А2 — 8 = 0 и вещественные собственные значения
'Аь А2 = ±\/8 противоположных знаков, что указывает на поведение
в окрестности седловой точки, что мы и наблюдаем в окрестности точек
(-2,0) и (+2,0). ■
Замечание. Рис. 6.4.2 и 6.4.4 иллюстрируют существенную качественную разницу
между жесткими (закалёнными) пружинами с C < 0 и мягкими пружинами с /3 > 0 в
нелинейном уравнении тх" = кх -f (Зх3. Принимая во внимание, что все траектории на фазовой
плоскости для жестких (закаленных) пружин ограничены, мягким пружинам на фазовой
плоскости соответствуют неограниченные траектории (а также ограниченные). Однако мы
должны понимать, что неограниченные траектории в случае мягких пружины на самом
деле не представляют физически реальные движения, когда при движении по ним будет
превышена способность пружины растягиваться без разрыва. ■
Нелинейные затухающие колебания
Предположим теперь, что материальная точка заданной массы на пружине связана также
с поршнем, который действует с силой сопротивления, пропорциональной скорости у =
= dx/dt материальной точки заданной массы. Если пружина все еще рассматривается как
нелинейная (т. е. как в уравнении B)), то уравнение движения материальной точки заданной
массы имеет вид
:> тх" = -ex'- кх +/Зх3, A2)
|Щес> 0—константа сопротивления. Если/? > 0, то эквивалентная система первого порядка
dy —кх — су + /Зх3
У> -Ц = —
т
с к
у х | х _
т т
(-И^
A3)
Цйяеет точки равновесия @,0) и ( ± у/к/C,0 j и матрицу Якоби
3(х,у) =
0
к 3C
mm m
576 Глава 6. Нелинейные системы и явления
Теперь наибольший интерес представляет точка равновесия в начале координат. Матрица
Якоби
О 1
J@,0) =
к_
га
с
га
имеет характеристическое уравнение
(-Л) (-— - \) + — = -(гаЛ2 + сЛ + к) =
V га /гага
и собственные значения
Ai, Л2 =
—с± л/с2 — Акт
2га '
Из теоремы 2 раздела 6.2 следует, что в критической точке @,0) системы A3) имеем
• узел-сток, если сопротивление является настолько большим, что с2 > Акт (т. е. когда
собственные значения отрицательны и неравны), но
• спиральный сток (устойчивый фокус), если с2 < Акт (т. е. когда собственные значения
комплексно сопряженные с отрицательной вещественной частью).
Следующий пример иллюстрирует последний случай. (В пограничном случае равных
отрицательных собственных значений начало координат может быть или узлом-стоком, или
спиральным стоком (устойчивым фокусом).)
Пример 2
Предположим, что га = 1, с = 2, к
система A3) примет вид
5 и C = |. Тогда нелинейная
§ = У, ft=-5x-2y + lx3 = -2y-5x(l-\x2).
Она имеет точки равновесия @,0), (±2,0) и матрицу Якоби
A4)
0
-5+^я2 -2
3(х,у) =
В начале координат (О, О) матрица Якоби
J@,0) =
1
0 1
-5 -2
имеет характеристическое уравнение А2 + 2А + 5 = 0 и комплексно
сопряженные собственные значения Ai, A2 = — 1 ± 2г с отрицательной
вещественной частью. Следовательно, начало координат
@,0)—спиральный сток (устойчивый фокус) нелинейной системы A4), причем
линеаризованная функция, дающая положение материальной точки заданной
массы, имеет вид
x(t) = e"*(,4cos2£ + Bsm2t),
6.4. Нелинейные механические системы 577
которой соответствует экспоненциально затухающее колебание с
положением равновесия х = 0.
В точке (±2,0) матрицаЯкоби
J(±2,0)
0 1
10 -2
имеет характеристическое уравнение Л2 4- 2Л — 10 = 0 и вещественные
собственные значения Ai = — 1 — \/1Т < 0 и А2 = —1 + \/ГГ > 0
с различными знаками. Из этого следует, что обе точки (—2,0) и (+2,0) —
седловые точки системы A4).
Рис. 6.4.6. Фазовый портрет в координатах скорость-положение для
системы, состоящей из материальной точки заданной массы,
закрепленной на мягкой пружине, при ra = l,fc = 5, /?=|, причем
константа сопротивления с = 2. Сепаратрисы выделены черным
Фазовый портрет в координатах скорость-положение на рис. 6.4.6
показывает траектории A4) и спиральный сток (устойчивый фокус) в начале
координат @,0), а также неустойчивые седловые точки (—2,0) и B,0).
Выделенные сепаратрисы делят фазовую плоскость на области, в которых
поведение траекторий различно. Поведение материальной точки
заданной массы зависит от области, в которой расположена ее начальная точка
'(#о ^ 2/о) • Если эти начальная точка находится в
• области I между сепаратрисами, то спиральные траектории
стремятся к началу координат при t —> +оо и, следовательно,
незатухающие периодические колебания недемпфированного случая
(рис. 6.4.4) теперь заменены затухающими колебаниями вокруг
устойчивого положения равновесия х = 0;
• области II, то материальная точка заданной массы проходит через
х = 0 при движении слева направо (х увеличивается);
578 Глава 6. Нелинейные системы и явления
• области III, то материальная точка заданной массы проходит через
х = 0 при движении справа налево (х уменьшается);
• области IV, то материальная точка заданной массы стремится к
положению неустойчивого равновесия (но не достигает его) х = — 2
слева, но останавливается и затем возвращается влево;
• области V, то материальная точка заданной массы стремится к
положению неустойчивого равновесия (но не достигает его) х = 2
справа, но останавливается и затем возвращается вправо.
Если начальная точка (xq , г/о) находится точно на одной из сепаратрис, то
соответствующая траектория или приближается к устойчивому фокусу,
или убегает на бесконечность от седловой точки при t —»-foo. ■
Нелинейный маятник
В разделе 3.4 мы получили уравнение
^+!-»=°
A5)
для незатухающих колебаний математического маятника, показанного на рис. 6.4.7. Там мы
использовали аппроксимацию sin в « в для в в окрестности нуля, чтобы заменить
уравнение A5) линейной моделью
где и2 = g/L. Общее решение
d20 ~
0(t) = Acosut + В smut
(i6)
A7)
уравнения A6) описывает колебания около положения равновесия 0 = 0 с круговой частотой
и и амплитудой С = (А2 4- В2I/2.
Рис. 6.4.7.
Математический маятник
Линейная модель непригодна для описания возможных движений маятника для
больших значений в. Например, равновесное решение 0(t) = 7г уравнения A5) для маятника,
стоящего прямо, не удовлетворяет линейному уравнению A6). И при этом уравнение A7)
6.4. Нелинейные механические системы 579
не описывает движение, при котором маятник неоднократно проходит через вершину, т. е.
когда 6{t) монотошо увеличивается, а не является колеблющейся функцией, зависящей от
t. Чтобы исследовать эти явления* мы должны проанализировать нелинейное уравнение
в" + cu2sin0 = 0, а не просто его линеаризация 0" 4-си20=^Оц Мы также хотим включить
возможность учета сопрртивления, пропорционального скорости^ так что мы рассматриваем
офцее нелинейное уравнение маятника
-Ш+с—. + u;2 sinЛщ Л
at2 at
A8)
Мы исследуем сначала случай незатухающих колебаний, в котором с = О.При#(£) = 6(t)
Hy(t) = 9f(t) эквивалентная система первого порядка принимает вид
dx
dy
_=2/? _ = _„ 8ШХ,
Мы видим, что эта система почти линейна, если записать ее э форме
dx
A9)
■у,
dy 2 , / \
B0)
где
д(х) = —cu2 (sin ж — х)
5!
+ ■
имеет только члены более высокого порядка.'
Точки равновесия системы A9) — это точки (шг, 0) где п — целое число, причем матрица
Якоби равна
J (я, у) =
0 1
-и2 cos х 0
B1)
Характер (природа) точки равновесия (п7г, 0) зависит от того, является п четным или
нечетным.
Случай четного п. Если п = 2т — четное целое число, то cos П7г = -Ы, так что B1) дает
матрицу
0 1
JBm7r,0) =
0
с характеристическим уравнением Л2 4- о;2 = 0 и чисто мнимыми собственными значениями
Аь Лг = ±шъ. Поэтому линеаризация A9) в точке (п7г, 0) представляет собой систему
du
■v,
dv о
B2)
Для которой начало координат @,0) является знакомым устойчивым центром, окруженным
эллиптическими траекториями (как в примере 4 из раздела 6.1). Хотя это тонкий случай, для
дагорого теорема 2 из раздела 6.2 не решает вопросу мы увидим теперь, что Bш7г, 0) также
1вляется устойчивым центром для первоначальной нелинейной системы A9), описывающей
Шаятник.
580 Глава 6. Нелинейные системы и явления
Случай нечетного п. Если п = 2т -Ь 1 — нечетное целое число, то cosn7r = — 1 , так
что B1) дает матрицу
J(Bm + lOr,0)=[w°2 J]
с характеристическим уравнением А2—ш2 = 0 и вещественными собственными значениями
Ai, Аг = ±.ш с различными знаками. Поэтому линеаризация A9) в точке (Bт 4- 1)тг, 0)
представляет собой систему
du dv 2
irt=v' -ж=ши' B3)
для которой начало координат @,0) является седловой точкой. Теперь из теоремы 2
раздела 6.2 следует, что точка равновесия (Bт 4- 1Oг, 0) —подобная седловая точка для
первоначальной нелинейной системы A9), описывающей маятник.
Траектории. Теперь, чтобы увидеть, как эти "четные центры" и "нечетные седловые
точки" примыкают один к одному, из системы A9) найдем траектории на фазовой плоскости
в явном виде. Если мы напишем
dy dy/dt a;2 sin ж
dx dx/dt у
и отделим переменные,
ydy + ш2 sin x dx = 0,
то интегрирование от х = 0 до х = х приведет нас к равенству
\y2+u2(l-cosx)=E. B4)
Мы пишем Е в качестве произвольной постоянной интегрирования, потому что если
физические единицы выбраны так, что т = L = 1, то первый член в левой части является
кинетической энергией, а второй выражает потенциальную энергию материальной точки
заданной массы, закрепленной на конце маятника. Тогда Е — полная механическая
энергия; таким образом, уравнение B4) выражает закон сохранения механической энергии для
незатухающих колебаний маятника.
Если мы решим уравнение B4) относительно у и используем тождество для половинного
угла, мы получим уравнение
у = ±\]2Е -4а;2 sin2 \x B5)
траекторий на фазовой плоскости. Обратите внимание, что подкоренное выражение в B5)
остается положительным, если Е > 2и2. На рис. 6.4.8 показаны (вместе с полем
направлений) результаты построения этих траекторий для различных значений энергии Е.
Сепаратрисы (выделенные черным на рис. 6.4.8) соответствуют критическому значению
Е = 2ш2 энергии; они входят (и убегают) в неустойчивые точки равновесия (п7г, 0), где п —
нечетное целое число. Следуя вдоль стрелок по сепаратрисам, маятник теоретически
приближается к вертикальному положению (балансировать в котором было бы весьма трудно)
в = х = Bт + 1)тг с количеством энергии, достаточным только для того, чтобы достичь
этого положения, но недостаточным, чтобы "перескочить через вершину". Неустойчивость
6.4. Нелинейные механические системы 581
4
2
0
2
4
_яу ?..
-> "^-"-"^
"*^0> x'"'"
"Л ^""^
'">ч\> //
=*.. V ->„.A.^ ' ->„..-^.,.^ '^-
3> ^~ " £>2«2 ^'-~'Й Й ^--4"
^"x-3 'х'""'*^""*4-^ "t"* ^'"'"N. "*,■
\^>/\^'*/\» ^
лЧ //^хЧ у/*л\ ^/
*" / \'^f
^E/r K\t
^ /'\4f
T" e 4 Y
1 1
У* к x^>v ^ \^У ^
X"" **\^ X^^'^t <""'^l
^ ^ ^ £>?«2 ^ ^ ^
1 1 1 11
-2%
2п
Ъп
An
5к
Рис. 6.4.8. Фазовый портрет в координатах скорость-положение
для системы х' = у, у1 — — sin x, описывающей незатухающие
колебания маятника. Сепаратрисы выделены черным
этого положения равновесия указывает, что такое поведение никогда не может наблюдаться
практически!
Простые замкнутые траектории, окружающие устойчивые точки равновесия — все они
соответствуют нижнему положению в = 2т7г маятника, — представляют периодические
колебания маятника назад и вперед вокруг положения устойчивого равновесия в = 0. Они
соответствуют энергиям Е < 2а;2, которые недостаточны, чтобы маятник поднялся до
вертикального положения.
Неограниченные траектории с Е > 2ш2 представляют круговые движения маятника,
в которых он неоднократно проскакивает через вершину в направлении по часовой стрелке,
если y(t) остается положительным, и в направлении против часовой стрелки, если y(t)
отрицательно.
Период незатухающих колебаний
Если маятник отпущен из состояния покоя с начальными условиями
х@) = 0@) = а, 2/@) = 0'(О) = 0, B6)
то уравнение B4) при t = 0 приводит к
aj2(l-cosa) = E. B7)
Следовательно, Е < 2а;2, если 0 < а < 7г, так что маятник совершает периодические
'колебания. Чтобы определить период этих колебаний, мы вычитаем уравнение B7) из урав-
582 Глава 6. Нелинейные системы и явления
нения B4) и пишем результат (при х = в и у = dO/dt) в форме
(cos 0 — cos a).
B8)
Период Т времени, требуемый для одного полного колебания, в четыре раза больше
времени, требуемого для уменьшения в от в — а до в = 0, т. е. времени, необходимого для
совершения одной четверти колебания. Следовательно, чтобы найти период, мы решаем
уравнение B8) относительно dt/dO и интегрируем полученное выражение:
Т =
d6
B9)
шу/2)о \/cos в — cos a
Чтобы оценить этот интеграл, мы сначала используем тождество cos# = 1 — 2 sin2 @/2)
d6
и получаем
1 Г
^ Jo
^Д2-sin2 @/2)'
где
OL
к = sin —.
2
Затем заменам = (l/fc)sin@/2) приводит к
Наконец, замена и = sin ^> дает
du
4 Г/2
~ w Jo
V(l~w2)(l-fc2u2)
йф
у/1 - к2 sin2 ф
C0)
Интеграл в C0) в действительности представляет собой эллиптический интеграл
первого рода, который часто обозначается F(fc, 7г/2). Его численное значение может быть оценено
следующим образом. Сначала, чтобы разложить в ряд подынтегральное выражение в C0),
мы используем биномиальный ряд
1 ... ^ ~ ,-.. -, „ C1)
у/Т^Х
Л ^ 1. з • • • Bп - 1)
= 1 + 2^ . . ,. , 'х-'
п=1
2-4---Bп)
при х = к2 sin2 $ < 1. Затем, мы почленно интегрируем, используя табличную формулу
интегрирования
surn </># = - ч
г
Jo
2-4---Bп)
C2)
Окончательный результат выражает формула
= П
+ ••
C3)
6*4^ Нелинейные механические системы 583
для периода Т нелинейного маятника, выпущенного из состояния покоя с начальным углом
0@) = а. Эта формула дает выражение искомого периода нелинейных колебаний через
период линейных колебаний То .== 2-к/шык ?= sin(a/2).
Бесконечный ряд во второй паре скобок в равенстве C3) представляет собой
коэффициент (множитель) Т/То, который указывает, во скрлько раз период Т нелинейных колебаний
больше, чем период линейных колебащш. Таблица на рис. 6.4,9 цолучена численным
суммированием этого ряда; она пцк^зывает? как T/Tq увеличивается при увеличении а. Таким
образом, Т на 0,19% больше, чем То, фсли a f^ 10°, тргда как Tt на 18,03% больше, чем То?
если а = 90°. Но даже разница на 0,19% существенна, как показывает вычисление
@,0019) х 3600СеКуВДа х 24^- х 7 ДСШ> » 1149 (секунда/неделя),
час день неделя
Это вычисление показывает, что линеаризованная модель весьма неадекватна для часового
маятника; ведь расхождение на 19 минут 9 секунд только за одну неделю недопустимо!
ииияи
10°
20°
30°
40°
50°
60°
70°
80°
90°
шш^^шви^
1,0019
1,0077
1,0174
1,0313
1,0498
1,0732
1,1021
1,1375
1,1803
Рис. 6.4.9. Зависимость
периода Т нелинейных колебаний
маятника от начального угла
отклонения a
Затухающие колебания маятника
раконец, мы кратко обсудим нелинейные затухающие колебания маятника. Почти линеййый
|квивалент системы первого порядка уравнению A9) имеет вид
dx
C4)
М=У>
dy 2 •
— = —ш sinx — су,
at
ш снова координаты точки равновесия имеют вид (п7г, 0) где п — целое число. В задачах
1-11 мы просим вас проверить, что
если п нечетно, то (птг, 0) — неустойчивая седловая точка системы C4), — так же, как
и в случае незатухающих колебаний; но
584 Глава 6. Нелинейные системы и явления
• если п четно и с2 > 4а;2, то (шг, 0) — узел-сток; тогда как
• если п четно и с2 < 4а;2, то (гс7Г, 0) — спиральный сток (устойчивый фокус).
На рис. 6.4.10 показаны траектории на фазовой плоскости для более интересного
случая слабозатухающих колебаний, с2 < 4а;2. Кроме физически нереализуемых траекторий-
сепаратрис, которые входят в неустойчивые седловые точки, каждая траектория в конечном
счете попадает в ловушку, т. е. ловится одним из устойчивых фокусов (п7г, 0), где п —
четное целое число. Это означает, что даже если маятник начинает колебаться с достаточным
количеством энергии, чтобы пробежать через вершину, после некоторого (конечного) числа
оборотов он потеряет такое (т. е. достаточно большое для этого) количество энергии, что
после этого он будет совершать затухающие колебания вокруг его устойчивого (нижнего)
положения равновесия.
Рис. 6.4.10. Фазовый портрет (в координатах скорость-
положение) для системы х' = у, у' = —sin x— \ у,
описывающей затухающие колебания маятника. Сепаратрисы выделены
черным
1ь4^^
В задачах 1-4 покажите, что данная система почти линейна, причем имеет точку равновесия
@,0), и классифицируйте эту критическую точку, т. е. определите ее тип и устойчивость. С
помощью компьютерной системы или графического калькулятора начертите фазовый портрет,
который иллюстрирует ваше заключение.
1.
3.
dx Л х , _ dy
— = 1 - ех rf 2у, -^ = -х - 4smt/
dx du
— = 2 sin x + sin у, — = sin x + 2 sin у (рис. 6.4.11)
at at
dx
~dt
ех + 2у-1,^ = 8х + еУ-1
at
6.4. Нелинейные механические системы 585
2я
п
^ 0
-п
-2п
%Р}>
/ l\Ly/ *
^ !^" *"****"'
/К/, /
7
/ ^
)\
If Л 7
/ /
/| /
у
^
|И"Я
^ _
|/\
-2я
О
л:
2я
Рис. 6.4.11. Траектории.системы
в задаче 2
dx
— = sin х cos у -
at
.**-*.
3 cos ж sin у
В задачах 5-8 найдите и классифицируйте каждую из точек равновесия почти линейных систем.
С помощью компьютерной системы или графического калькулятора начертите фазовый портрет,
который иллюстрирует ваши результаты.
dx dy
dx
dy
-=y,-=smnx.
dx
Tt=l~e
,x-y dy
, -j- — 2 sin x
at
dx _ . dy
—- = 3smx + 2/, -37 = sm:r+ 2y
at at
В задачах 9-11 рассматривается система х'
колебания маятника.
у, у = —ш sm х — су, описывающая затухающие
9. Покажите, что если п — нечетное целое число, то точка равновесия (п7г, 0) является седловой
точкой для системы, описывающей затухающие колебания маятника.
10. Покажите, что если п — четное целое число и с2 > 4а;2, то точка равновесия (п7г, 0) — узел-сток
для системы, описывающей затухающие колебания маятника.
11. Покажите, что если п — четное целое число и с2 < 4а;2, то точка равновесия (п7г, 0) —
спиральный сток (устойчивый фокус) для системы, описывающей затухающие колебания маятника.
В каждой из задач 12-16 дано уравнение второго порядка вида х"+f(x, х') — 0, которое
соответствует некоторой системе, состоящей из материальной точки заданной массы, закрепленной на
пружине. Найдите и классифицируйте точки равновесия эквивалентной системы первого порядка.
12. х" + 20ж — 5ж3 = 0. Проверьте, что точки равновесия напоминают показанные на рис. 6.4.4.
13. х"+2х'+2Ъх—Ьхъ = 0. Проверьте, что точки равновесия напоминают показанные на рис. 6.4.6.
14. х" — 8х + 2х3 = 0. Здесь линейная часть силы является отталкивающей, а не притягивающей
(как в обыкновенной пружине). Проверьте, что точки равновесия напоминают показанные на
рис. 6.4.12. Таким образом, есть две точки устойчивого равновесия и три типа периодических
колебаний.
15. х" + Ах — х2 = 0. Здесь силовая функция несимметрична. Проверьте, что точки равновесия
напоминают показанные на рис. 6.4.13.
586 Глава 6. Нелинейные системы и явления
Рис. 6.4.12. Фазовый портрет Рис. 6.4.14. Фазовый портрет
для задачи 14 для задачи 16
16. х" + 4ж — 5ж3 + х5 — 0. Здесь идея состоит в том, что в силовой функции сохранены
слагаемые всех нечетных степеней, вполь до пятой. Проверьте, что точки равновесия напоминают
показанные на рис. 6.4.14.
В задачах 17-20 проанализируйте точки равновесия указанной системы, с помощью
компьютерной системы начертите иллюстративный фазовый портрет в координатах скорость-положение
и опишите совершаемые колебания.
17. Пример 2 в этом разделе иллюстрирует случай затухающих колебаний в системе, состоящей
из материальной точки заданной массы, закрепленной на мягкой пружине. Исследуйте пример
затухающих колебаний в системе, состоящей из материальной точки заданной массы,
закрепленной на жесткой (закаленной) пружине. Параметры системы возьмите те же самые, что
и в примере 2? за исключением того, что теперь положите /3 = — | < 0,
18. Пример 2 иллюстрирует случай затухающих колебаний в системе, состоящей из материальной
точки заданной массы, закрепленной на пружине, сопротивление которой пропорционально
скорости. Исследуйте случай, когда член, выражающий сопротивление, пропорционален
квадрату скорости. Параметры системы возьмите те же самые, что и в примере 2, но слагаемое,
выражающее сопротивление, возьмите в виде — сх'|ж'|, а не в виде —сх\ как в уравнении A2).
6.4. Нелинейные механические системы 587
19. Теперь снова решите пример 2, но с изменениями, соответствующими задачам 17 и 18.
Иными словами, возьмите /? = —|<0мв уравнении A2) замените слагаемое, выражающее
сопротивление, выражением —сх'\х'\.
20. Уравнения х' = у, у' = — sin х — \y\y\ моделируют систему, состоящую из маятника с
демпфером. Уравнения этой системы похожи на уравнения C4). Фазовый портрет этой системы похож
на представленный на рис. 6.4.10. Но теперь сопротивление пропорционально квадрату
угловой скорости маятника. Сравните совершаемые колебания с теми, которые происходят, когда
сопротивление пропорционально угловой скорости.
Задачи 21-26 посвящены исследованию периода Т колебаний материальной точки заданной массы
на нелинейной пружине с уравнением движения
^+Ф(х) = 0. C5)
Если ф(х) = кх, причем к > 0, то пружина фактически линейна, причем период То — 2п/\/~к.
21. Проинтегрируйте один раз данное уравнение (по образцу уравнения F)) и получите уравнение
энергии
±y2 + V(x) = E, C6)
где у = dx/dt и v
V(х) = Г ф(и) du. C7)
Jo
22. Если материальная точка заданной массы, отпущенная из состояния покоя при начальных
условиях х@) = хо, у@) = 0, совершает периодические колебания, то из уравнения C6)
следует, что Е = V(xo) и что время Г, требуемое для совершения одного полного колебания,
равно
du
V2k y/V(x0)-V(u)'
23. Пусть ф{х) = kx — 0х3 (как в основном тексте). Выведите из уравнений C7) и C8), что
Г° dx_
^/{хЪ-и*){2к-13хЪ-13и>)
24. Подставьте и = хо cos ф в C9) и покажите, что
Г"/2 <1ф
C8)
Т = 4V2£C „ я _7" „ „ .о,- C9)
, _ 2Го Г
tiVI - е Jo
г\/1 - е Jo y/l - /лвт2ф'
где То = 2ir/Vk — период линейных колебаний,
D0)
0 2 1 « /у11ч
6 = Г° и " = l'w D1)
25, Наконец, используйте биномиальный ряд C1) и формулу C2) для интеграла и оцените
эллиптический интеграл D0) и таким способом покажите, что период Т колебаний выражается
формулой
588 Глава 6. Нелинейные системы и явления
26. Пусть б = (Зхо/к является настолько маленьким, что величиной е2 можно пренебречь. Выведите
из уравнений D1) и D2), что
T«To(l + |e)=T0(l+M^). D3)
Из этого следует, что
• если /3 > 0, т. е. пружина мягкая, то Т > То, и с увеличением хо увеличивается Т, так что
большие овалы на рис. 6.4.4 соответствуют меньшим частотам;
• если C < 0, т. е. пружина жесткая (закаленная), то Т < То, и увеличение хо уменьшает Т,
так что большие овалы на рис. 6.4.2 соответствуют большим частотам.
6.4. Приложение. Уравнения Рэлея и Ван-дер-Поля
Чтобы моделировать колебания, возникающие в дудочке кларнета, британский ученый в
области математической физики Лорд Рэлей (Lord Rayleigh, John William Strutt, 1842-1919)
рассматривал уравнение вида
mx" + kx = ax' - b{x'f. A)
При у = х' мы получаем автономную систему
х' = у,
, —kx + ay — by3 B)
У = ,
m
чей фазовый портрет показан на рис. 6.4.15 (для случая m = k = a = b=l). Внутренние
и внешние спиральные траектории сходятся к решению, которое является "предельным
циклом", соответствующим периодическим колебаниям, возникающим в дудочке. Период
Т (и, следовательно, частота) этих колебаний может быть измерена по интегральной кривой,
вычерченной в координатах t и х. Ее график изображен на рис. 6.4.16. Этот период колебаний
зависит только от параметров гп,к,аиЬв уравнении A) и не зависит от начальных условий
(почему?).
Выберите ваши собственные значения параметров т, к, а и b (возможно наименьшие
четыре отличные от нуля цифры в номере вашего студенческого билета) и с помощью
доступной утилиты для построения графиков решений обыкновенных дифференциальных
уравнений начертите траектории и интегральные кривые, как показано на рис. 6.4.15и6.4.16.
Измените один из ваших параметров, чтобы увидеть, как в результате этого изменится
амплитуда и частота получающихся периодических колебаний.
Уравнение Ван-дер-Поля
На рис. 6.4.17 показана простая цепь RLC, состоящая из сопротивления, индуктивности
и емкости, в которой обычное (пассивное) сопротивление R было заменено активным
элементом (типа электронной лампы или полупроводника), причем падение напряжения V
в этой цепи дается известной функцией /(/) от тока /. Конечно, V = f(I) = IR для
резистора. Если мы подставим /(/) вместо IR в знакомое из раздела 3.7 уравнение RLC-цепи
6.4. Нелинейные механические системы 589
Рис. 6.4.15. Фазовый
портрет для системы Рэлея B) при
т = к = а = Ь =1
О 5
10 15 20 25 30 35 40
t
Рис. 6.4.16. Интегральная
кривая в координатах t и х с
начальными условиями х@) = 0,01,
х'@) = 0
LV + RI + Q/C = 0, то дифференцирование даст уравнение второго порядка
LJ"+ /'(/)/' +1 = 0.
C)
Рис. 6.4.17. Простая цепь
с активным элементом ,
В 1924 году изучая колебательные цепи в ранних коммерческих радиоприборах, Балтазар
Ван-дер-Поль (Balthasar van der Pol, 1889-1959) предположил, что падение напряжения
дается нелинейной функцией вида /(/) = Ы3 — al, подстановка которой в уравнение C)
дает уравнение
Ы" + C6/2 - а)Г + у; = 0.
D)
Это уравнение тесно связано с уравнением Рэлея и имеет фазовые портреты, напоминающие
приведенные на рис. 6.4.15. Действительно, дифференцирование второго уравнения в B)
к замена х' = у приводят к уравнению
ту" + (ЗЬу2 - а)у' + ку = 0, E)
Которое имеет тот же самый вид, что и уравнение D).
590 Глава 6. Нелинейные системы и явления
Если мы обозначим переменной т время в уравнении D) и сделаем подстановки I = рх9
t = т/y/LC, получим
d?x_
dt2
+ (Ыр
,2 „2
ч С dx
Прир = у/а/(ЗЬ) и ц — ayJC/L пЬлучится стандартная форма
х'\ + /л(х2 - 1)х' + х = 0
F)
уравнения Ван-дер-Поля;
Для каждого неотрицательного значения параметра рь решение уравнения Ван-дер-Поля
при х@) = 2, ж'@) =? 0 является Ш£иодическим, причем'соответствующая траектория
на фазовой плоскости представляет собой предельный цикл, к которому сходятся другие
траектории (как на рис. 6.4.15). Вам будет весьма поучительно численно решить уравнение
Ван-дер-Поля и начертить эту периодическую траекторию для избранных значений от // = 0
до р = 1000 или больше. При р = 0 это окружность радиуса 2 (почему?). На рис. 6.4.18
показана периодическая траектория при р = 1, а на рис. 6.4.19 приведены
соответствующие интегральные кривые x{t) и у{€). При больших р уравнение Ван-дер-Поля является
"весьма жестким", и периодическая траектория более эксцентрична — как на рис. 6.4.20,
график на котором был вычерчен с помощью программы ode 15s для решения жестких
обыкновенных дифференциальных уравнениий, которая входит в достав пакета MATLAB.
Соответствующие интегральные кривые x(t) и y(i) на рис. 6.4.21 и 6.4.22 демонстрируют
удивительное поведение этих координатных функций» В каждой из них длинные интервалы
очень медленного изменения чередуются с периодами резкого изменения, притом в течение
очень коротких временных интервалов, которые соответствуют "квазиразрывам", которые
видимы на рис. 6.4.21 и 6.4.22. Например, на рис. 6.4.23 видно, что между t = 1614,28
и t = 1614,29, значение y(t) увеличивается от величины, примерно равной нулю, до
более чем 1300 и затем снова возвращается назад. Возможно, вам удастся измерить расстояние
Рис. 6.4.18. Траектория
периодического решения
уравнения Ван-дер-Поля на фазовой
плоскости при р = 1, а также
некоторые спиральные
траектории внутри и вне цикла
1.1
4
3
2
1
0
-1
-2
-3
~\
Y»
-уЮ
>
п—
i / \
,i
5
1
i
10
t
1
\ \ /
i
15
-
-
2
Рис. 6.4.19. Интегральные
кривые x(t) и y(t)9
определяющие периодическое решение
уравнения Ван-дер-Поля при
М = 1 г,
6.4. Нелинейные механические системы 591
2000
1500
1000
500
* о
-500
-кию Ь
-1500
-2000
1 t I
',,,/
: L
II 1
1 II
- ц=1000-
- \ -
1 1 1
/ B,)
i i i
-4 -3
-2-10 1
х
2 3 4
Рис. 6.4.20. Траектория
периодического решения уравнения
Ван-дер-Поля на фазовой
плоскости при ji = 1000
4
2
н 0
-2
-4
i 1 г
L
40
1 Г
1111
т 1
1 1
0 500 1000 1500 2000 2500 3000
t
Рис. 6.4.21. График х(t) при
р = 1000
между началом координат и точками пересечения на координатной оси х или у (т. е. измерить
отрезки, отсекаемые на координатных осях). Тогда вы сможете показать, что на рис. 6.4.20
период обхода вокруг цикла приблизительно равен Т — 1614. Действительно, вычисления
и построение рисунков, подобных приведенным здесь, могут служить хорошим испытанием
ошибкоустойчивости программы решения обыкновенных дифференциальных уравнений,
входящей в состав вашей компьютерной системы.
Вы могли бы также начертить другие траектории для \х = 10100 или 1000, что (подобно
траекториям на рис. 6.4.18) находятся внутри и вне предельного цикла. Начало координат
напоминает фокус на рис. 6.4.18. И действительно, покажите, что @,0) является спиральным
источником (неустойчивым фокусом) для уравнения Ван-дер-Поля при 0 < // < 2, но узлом-
источником при рь>2.
1500
1000
500
^ 0
-500
-1000
-1500
i i i i i |
y(t) 1
•\
Г
н
•J
1 I i i i 1
0 500 1000 1500 2000 2500 3000
t
Рис. 6.4.22. График y(t) при \х =
= 1000
1614.28
1614.29
Рис. 6.4.23. Верхний пик на
графике y(t)
592 Глава 6. Нелинейные системы и явления
6.5. Хаос в динамических системах
В предыдущих разделах мы рассматривали прирост популяции и механические системы как
детерминированные: мы считали, что начальное состояние физической системы полностью
определяет ее будущее развитие. Но многие часто встречающиеся самые обычные системы
часто демонстрируют поведение, которое иногда кажется хаотическим в том смысле, что
будущие состояния таких систем не являются надежно предсказуемыми, даже если известны
начальные условия. Этот раздел содержит материал для проекта, который иллюстрирует
явление хаоса, к которому в настоящее время проявляется большой интерес в науке и технике.
Прирост популяции и удвоение периода
В разделе 2.1 мы ввели логистическое дифференциальное уравнение
^- = аР-ЪР2, (а,Ь>0), A)
которое моделирует ограниченный (а не экспоненциальный) рост численности популяции.
Действительно, если численность популяции P(t) удовлетворяет уравнению A), то при
t —» -f-oo P(t) приближается к [конечной] граничной численности популяции М = а/Ь.
Мы обсудим здесь "дискретную" версию логистического уравнения, которое давно было
знакомо ученым, но только недавно было обнаружено, что именно это уравнение поможет
предсказать весьма экзотические и неожиданные модели поведения некоторых популяций.
Чтобы численно решить уравнение A), как и в разделе 2.4, мы сначала выбираем
фиксированную величину шага h > О и рассматриваем дискретную последовательность моментов
времени
to,ti1t2,... ,£n,£n+i,..., B)
где £n+i =tn + h для каждого п. Начиная с начального значения Ро = P(to)9 мы вычисляем
аппроксимации
Pi,P2,- • • ,Pn»-Pn+ij • • • C)
к точным значениям P(h)9 Pfa), РAз), • • • фактической численности популяции P(t).
Например, метод Эйлера для логистического уравнения A) состоит из вычисления
аппроксимаций C) посредством многократного применения формулы
Pn+i = Рп + (аРп - 6РП2) • h. D)
Теперь предположим, что численность популяции такова, что величину шага h можно
выбрать так, что аппроксимации, рассчитанные с помощью равенства D), имеют
приемлемую точность в сравнении с фактическими значениями популяции. Это могло бы иметь
место, например, для популяции животных или насекомых, в которой все воспроизводство
(размножение, репродукция) происходит в период случных сезонов короткой
продолжительности, которые повторяются через постоянные интервалы времени. Если h — интервал
между последовательными случными сезонами, то численность популяции Рп в течение
одного случного сезона может зависеть только от численности популяции Pn_i в течение
6.5. Хаос в динамических системах 593
предыдущего сезона, причем Рп полностью определяет численность популяции Pn+i в
течение следующего случного сезона.
Так что давайте в ходе обсуждения предполагать, что последовательные значения Рп =
= P(tn) численности популяции можно определить с помощью уравнения
Pn+i = Рп + (аРп - ЬР%) • h. D)
Таким образом, мы заменяем первоначальное дифференциальное уравнение A)
"дискретным" уравнением в конечных разностях
APn = (aPn-bP^)At, E)
которое выражает прирост популяции АРп = Pn+i — Рп через шаг по времени h = At
и предыдущую численность популяции Рп.
Уравнение D) может быть переписано как логистическое уравнение в конечных
разностях
Pn+1 = rPn - sPl F)
где
г = 1 + ah и s = bh. G)
Подстановка
Рп = -in (8)
s
в уравнении F) упрощает все это еще больше, и в конце концов мы получаем уравнение
xn+i =гхпA~хп). (9)
Теперь мы сосредотачиваем наше внимание на полученной итерационной формуле —
равенстве (9). Считая заданными начальные значения х0 и г, по этой формуле можно
сгенерировать последовательность значений х\, Х2, #з, • • •»соответствующих последовательным
моментам времени t\, £2, ^з> • • • • Значение хп в момент времени tn можно рассматривать
как часть максимального значения численности популяции, которую может поддерживать
среда. Принимая предположение о том, что существует предельное значение дробей,
выражающих часть численности популяции
Хоо = lim xn, A0)
п—юо
мы хотим исследовать, как Жоо зависит от параметра роста г в уравнении (9). Иными
словами, мы расматриваем г как входной параметр (аргумент) процесса, а Хоо—как выходной
параметр (результат) и спрашиваем, как выходной параметр (результат) зависит от входного
параметра (аргумента).
Итерация в уравнении (9) легко программируется на любом доступном входном языке
калькулятора или языке программирования. На рис. 6.5.1 показано, как на входных языках
пакетов Maple, Mathematica и MATLAB закодировать простую программу, которая начиная
с х\ = 0,5 вычисляет результаты (и строит их список) первых нескольких сотен (к = 200)
итераций при г = 1,5.
594 Глава 6. Нелинейные системы и явления
Mathematica
г := 1.5:
х = arrayA..200) :
х[1] := 0.5:
for n from 2 to 200 do
z := x[n-1]:
x[n] := r*z*A-z) :
od:
r = 1.5;
x = Table[n,{n,l,200}];
x[[l]] = 0.5;
For[n=2, n<=200,
n=n+l,
z = x[[n-l]];
x[ [n]] = r*z*A-z)];
r = 1.5;
x = 1:200;
x(l) = 0.5;
for n = 2:200
z = x(n-1);
x(n) = r*z* A-z);
end
Рис. 6.5.1. Версии простой итеративной программы на входных языках
пакетов Maple, Mathematica й MATLAB
Поскольку в уравнении G) г = 1 + ah, для нашей идеализированной модели дискретного
прироста популяции подходящими являются только те значения г, которые больше 1.
Оказывается, что если взять типичное значение параметра роста г (оно приведено в первой строке),
то результаты не зависят существенно от начального значения х\. После достаточного
количества (это число зависит от значения значения г) итераций оказывается, что значение хп
практически стабилизируется и оказывается примерно равным предельному значению #оо»
которое определяется равенством A0). Например, на рис. 6.5.2 показаны результаты
выполнения нашей простой итеративной программы для значений г = 1,5, 2,0 и 2,5 параметра
скорости прироста; в результате получились дроби (части численности популяции)
Хоо = 0,333333, 0,500000 и 0,6000000
соответственно. Таким образом, оказывается, что Хоо существует и что его значение
монотонно возрастает с увеличением г.
Упражнение 1. Попробуйте взять несколько других значений параметра скорости роста
в диапазоне 1 < г < 3. Подтверждают ли ваши результаты догадку о том, что предельная
численность популяции всегда существует и является возрастающей функцией от г?
Результаты, приведенные на рис. 6.5.3, показывают, что догадка, которая могла
возникнуть на основе изучения ограниченного количества примеров (см. упражнение 1), ложна!
При возрастании параметра скорость роста от г = ЗДдог = 3,25 [дробная] часть
численности популяции не может стабилизироваться около единственной предельной численности
популяции. (Мы провели вычисления для более чем тысячи итераций, чтобы удостовериться
f
a
о
Ъо
ь-*
ю
В
оооооооо
оооооооо
оооооооо
nJUInIUInIOIvIUI
С^СЛСЛСЛО^СЛО^СЛ
4^CO^00d^00^00
0^0(ПО(^0(ПО
оооооооо
00 ^ 00
£*
ю
00 d^
rouifooirouiwui
d^CO£*CO£*CO£*CO
X
*i
II
5°
lo
СЛ
о
>.
со
го
<У\
ко
о
■>
ы
со
ГО
со
о
■>»
со
~J
(Л
о
о
^
(Л
о
о
ко
о
■>
со
го
с^
<^>
о
■>»
ы
со
го
со
о
>
со
<1
(Л
о
о
■*
(Л
о
о
ко
ххх
£* Ы ГО
X
При
о о о о
-J (Л -J (Л
О^ £* -J О
КО О СЛ О
ко о^ о о
о о о о
СО d^ СО (Л
I-*
го
£ъ
ко
СП
м
I-*
to
(Л
о
о
о
о о о< о
СО Ы СО (Л
ГО СО <1 О
о^ го (л о
кО СО О О
ни
о *
s к
чз
§
со
а
а
р
о
3
р
X X X X
ГО М М Н»
о ко ко ко
О VO CO -J
о о о о
*» > ■> ■>
СО СО СО СО
СО СО СО СО
CO CO CO CO
CO CO CO CO
О О О О
> > > ■>
LH LH in LH
о о о о
о о о о
о о о о
о о о о
■> ^ *» ■>
(Ts (Ts СГ> СГ>
о о о о
о о о о
о о о о
ххх
со го м
о о о
СО СО (Л
СЛ -J
Ь» СЛ
съ о
о о о
СЛ СЛ СЛ
о о
о о
о о
о о о
> ■> >
(Л СГ> СЛ
со го
СП СП
ко о
if
1
II
о
it
to
V
О)
СЛ
X
ш
о
о
ш
S
I
ш
S
л
CD
о
о
I
2
ш
X
<0
СП
596 Глава 6. Нелинейные системы и явления
Таким образом, мы имеем не одну предельную численность популяции, а скорее
"предельный цикл", состоящий из двух различных численностей популяции (как показано
графически на рис. 6.5.4). Кроме того, когда скорость роста увеличивается до г = 3,5, период цикла
удваивается, и теперь мы имеем предельный цикл с периодом 4; циклы популяции
повторяются: каждый их них состоит из четырех различных значений — 0,5009, 0,8750, 0,3828
и 0,8269 (рис. 6.5.5).
Упражнение 2. Попробуйте взять значения параметра скорость роста в диапазоне
2,9 < г < 3,1, чтобы возможно точнее определить, при каком значении параметра одна
предельная численность популяции (при увеличении г) превращается в цикл периода 2.
Случается ли это тогда, когда г превышает 3?
Результаты, показанные на рис. 6.5.6, указывают, что цикл с периодом 8 получается тогда,
когда значение параметра скорость роста достигает г = 3,55. События теперь происходят
весьма быстро.
1.0
0.8
0.6
0.4
0.2
и 1 1 1 г
х = 0.8124
х = 0.4953
J_
'88 990 992 994 996 998 1000
Рис. 6.5.4. На графике х(п) =
= хп виден период 2
итерационного цикла, который получается
при г = 3,25
1.0
0.8
0.6
0;4
0.2
0.0
1—
U х = 0.8750
/\ 71
п г
* = 0.8269 J
Ь ,'\ 1\ Л !\ м J
ГУ w V \/\/ \Я
L £ _ _tJ ___*__ -l* * - —НА
I*=0.5009 у
Г
х = 0.3828
988 990 992 994 996 998 1000
п
Рис. 6.5.5. На графике х(п) =
= хп виден период 4
итерационного цикла, который получается
при г = 3,5
Упражнение 3. Проверьте, что цикл с периодом 16 получается при значении параметра
скорость роста г = 3,565.
Упражнение 4. Сможете ли вы найти цикл периода 32 при значении параметра где-нибудь
между г = 3,565 и г = 3,570?
Именно благодаря этому явлению удвоения периода столь безвредно выглядящая
итерация xn+i = гхпA — хп) стала широко известной в последние годы. Когда значение
параметра скорости роста увеличивается и превосходит г = 3,56, удвоение периода
происходит настолько быстро, что кажется, что где-нибудь в окрестности г = 3,57 вспыхивает
чрезвычайный хаос. Таким образом, график, показанный на рис. 6.5.7, указывает, что при
г = 3,57 периодичность, которая наблюдалась ранее, кажется, исчезает. Не видно никакого
периодического цикла и численность популяции, кажется, изменяется (от одного месяца
к следующему) некоторым чрезвычайно случайным способом. Действительно,
детерминированный прирост популяции, который соблюдался при меньших значениях параметра,
6.5. Хаос в динамических системах 597
ЩМ§ШШШШ:,
1001
1002
1003
1004
1005
1006
1007
1008
1009
1010
1011
1012
1013
1014
1015
1016
ШШШшШшШШШ
-0,5060
0,8874
0,3548
0,8127
0,5405,
0,8817
0,3703
0,8278
0,5060
0,8874
0,3548
0,8127
0,5405
0,8817
0,3703
0,8278
Рис. 6.5.6. Период 8 цикла по
лучается при г = 3,55
кажется, теперь окончательно дегенерировал и превратился в недетерминированный
процесс с очевидно случайным изменениями.
Программа, названная нами PICHFORK, генерирует визуальное представление
зависимости поведения наших итераций от значения параметра роста г. (Версии программы
PICHFORK легко написать для пакетов Matlab, Mathematica и др.) Для каждого значения
г во входном интервале а ^ г ^ Ь (горизонтальная ось в полученной диаграмме) сначала
выполняется 1000 итераций, чтобы достичь "устойчивости". Затем следующие 250
значений х, полученных в результате итераций, наносятся на график по вертикальной оси — т. е.
"включается" пиксель экрана в точке (г, х). Полученный график описывает ситуацию
визуально и называется "диаграммой ветвления", взглянув на которую, можно сразу сказать,
чему соответствует данное значение г — циклу (с конечным периодом) или хаосу. Если раз-
, решение изображения достаточно для того, чтобы на диаграмме было отчетливо видно, что
только конечное множество значений х находится выше данного значения г, то
диаграмма сразу покажет, что итерация "в конечном счете становится периодической" для данной
конкретной величины параметра скорости роста.
На рис. 6.5.8 показана диаграмма ветвления для интервала 2,8 Sr = 4,0. Просматривая
ее Слева направо, мы видим единственное значение предельной численности популяции до
г « 3, затем цикл с периодом 2 до г « 3,45, затем цикл периода 4, а затем цикл периода 8 и т. д.,
а дальше картина быстро приближается к темноте хаоса. Но заметьте вертикальные полосы
"незаполненного пространства", которые появляются в диаграмме между г = 3,6иг = 3,7,
между г = 3,7 и г = 3,8, снова между г = 3,8 и г = 3,9. Они представляют области, куда
[периодический] порядок возвращается из предыдущего хаоса.
1.KJ
0.8
0.6
0.4
0.2
l l
4 - Ы,
5 7, ,'.,,' , '
If | |
1 1
1 1
*i S ? 1 А
?>.'•' ь: У -;
1
1 1
1 1
*:' ^ '? '.
, f '
1 1
-" г
'■■ -
; ' i '
i
_J
_
f i
¥-
1 1
1000 1005 1010*1015 1020 1025 1030 1035 1040
n
Рис. 6.5.7. При г = 3,57: Хаос!
598 Глава 6. Нелинейные системы и явления
Рис. 6.5.8. Диаграмма ветвления
щ>и2,8 <;4<;4,о,о<; х<; i
Рис. 6.5.9. Диаграмма ветвления
при 3,8 й г й 3,9,0 й х й 1
Например, на рис. 6.5.9 показан интервал 3,8 ^ г ^ 3,9, где мы видим цикл
периода 3, который появляется внезапно из хаоса в окрестности г = 3,83 и затем разбивается
последовательно на циклы с периодами б, 12, 24, ... (рис. 6.5.10 й 6.5.11). Это удвоение
периода, которое начинается с цикла периода 3, особенно существенно — ему в 1975 году
была посвящена фундаментальная статья Джеймса Йорка (James Yorke) и Т. Ли (T.-Y. Li)
в знаменитом американском математическом ежемесячнике A merican Mathematical Monthly
под названием "Period Three Implies Chaos" (Из периода три возникает хаос). Согласно этой
статье, существование цикла периода 3 (для соответствующей итерации) подразумевает
существование циклов любого другого [конечного] периода, а также хаотических "циклов"
без периода вообще.
х = 0.9594
х = 0.4880
1494
1002 1004 1006 1008 1010 1012
п
Рис. 6.5.10. На графике х(п) = хп
виден период 3 итерационного цикла,
который получается при г = 3,84
1.0
0.8
0.6
0.4
0.2
0.0
=4tzm
1002 1004 1006 1008 1010 1012
п
Рис. 6.5.11. На графике х(п) = хп
виден период 6 итерационного цикла,
который получается при г = 3,845
Проект 1. С помощью программы PICHFORK найдите другие интересные циклы и
проверьте их очевидные периоды соответствующими итерационными вычислениями.
Например, вы должны найти цикл с периодом 10 между г = 3,60 и г = 3,61 и цикл с периодом 14
между г = 3,59 и г = 3,60. Можете ли вы найти циклы с периодом 5 и 7? Если да, ищите
последующее удвоение периода. Выполнение программы PICHFORK требует нескольких
6.5. Хаос в динамических системах 599
сотен тысяч итераций, так что эту программу лучше выполнять на быстродействующем
компьютере (или же накануне вечером запустить программу на ночной прогон).
Просматривая диаграмму ветвления (рис. 6.5.8) слева направо, мы определяем
последовательные значения ri, г$, гз, ... параметра скорость роста, при которых происходит
бифуркация (раздвоение или качественное изменение) итерационного процесса xn+i =
= гхпA ~ хп) при дальнейшем увеличении значения г. Это такие дискретные значения г,
для которых любое достаточно малое увеличение параметра роста удваивает период
итерации. В 1970-х годах физик из Лос-Аламоса Митчелл Фейгенбаум (Mitchell Feigenbatim)
обнаружил, что в основе этого удвоения периода на пути к хаосу лежит некоторый порядок
(закон):
lim Гк " rfc~1 = 4,66920160981.... A1)
fc-»oo 7-fc+l - Гк
Дробь слева в уравнении A1) — отношение длин последовательных "окон" постоянного
периода в диаграмме ветвления. Именно тот факт, что указанное отношение приближается
к пределу при к —► Н-оо, а не конкретная величина этого предела, демонстрирует тип (вид)
порядка, который может лежать в оЬнове явления удвоения периода, наблюдаемого для
итераций конкретного.вида xn+i = гхпA — хп). С другой стороны, теперь известно, что
точно та же самая константа Фейгенбаума 4,66920160981... играет точно ту же самую
роль для широкого разнообразия явлений удвоения периода, возникающих во многих самых
разнообразных областях науки.
Проект 2. Чтобы выполнить вычисления, приведшие к открытию его знаменитой
константы, Фейгенбаум использовал карманный калькулятор НР-65, а не мощный
компьютер! Возможно, вы захотите выполнить итерационные вычисления с помощью программы
PICHFORK, чтобы с достаточной точностью изолировать несколько первых значений г и г 2,
гз,..., при которых происходит удвоение, и затем проверить, что предел A1) действительно
приблизительно равен 4,67. Вы можете заглянуть на страницы 124-126 книги Т. Грея (Т. Gray)
и Дж. Глина (J. Glynn) Exploring Mathematics with Mathematical посвященной
исследованию Математики с помощью пакета Mathematica. (Эта книга была издана издательством
Addison-Wesley в 1991 году.) Такой подход действительно заслуживает внимания знатока7.
Удвоение периода в механических системах
В разделе 6.4 мы ввели дифференциальное уравнение второго порядка
тх" + сх' + кх + (Зхг = 0, A2)
которое моделирует свободные затухающие колебания материальной точки заданной массы
йа нелинейной пружине, при которых затухание определяется скоростью. Вспомните, что
член кх в уравнении A2) представляет силу, приложенную к материальной точке заданной
массы линейной пружиной, тогда как член /?х3 представляет фактическую нелинейность
пружины.
7 На русском языке также имеется книга, в которой рассматривается применение пакета Mathematica для
решения подобных задач: Я.К. Шмидский, Mathematica 5. Самоучитель (Диалектика, 2004). В главе 11 этого
самоучителя можно найти много полезных коротких программ на входном языке пакета Mathematica для
изучения поведения простых динамических систем, в том числе и нашей рекуррентной последовательности. —
Примеч. ред.
600 Глава 6. Нелинейные системы и явления
Мы хотим теперь обсудить вынужденные колебания, которые происходят тогда, когда на
материальную точку заданной массы действует внешняя сила F(t) = Fq cos ujt. Если такая
сила действует на систему, свободные колебания которой описываются уравнением A2),
то для смещения x(t) материальной точки заданной массы от ее положения равновесия мы
получим уравнение Дуффинга в случае вынужденных колебаний
тх" + дх' + kx + fix3 = Fq coswt.
A3)
Для большинства значений параметров решить уравнение A3) явно относительно х (t)
невозможно. Однако качественно его решения описать можно — для этого достаточно изобразить
его траектории на фазовой плоскости (это подобно тому, как в разделе 6.4 мы имели
обыкновение описывать свободные колебания нелинейных механических систем). Конечно, сами
траектории при этом придется вычислить численно с помощью методов приближенных
вычислений.
ВТ "/О
(а)
(Ь)
(с)
Рйс. 6.5.12. Положения равновесия
материальной точки заданной массы
на нити: (а)—устойчивое равновесие
прих < 0; (Ь)—неустойчивое
равновесие в точке х = 0; (с)—устойчивое
равновесие при х > 0
Константа Гука к положительна для типичной пружины, которая сопротивляется
смещению от положения равновесия. Но существуют простые механические системы, которые
подражают пружине, имеющей отрицательную константу Гука. Например, на рис. 6.5.12
показана материальная точка массы т наверху вертикальной металлической нити. Мы
предполагаем, что тонкая металлическая нить может колебаться только в вертикальной плоскости
и ведет себя подобно гибкому сжатому стержню, который деформируется (сгибается), когда
материальная точка заданной массы помещена на такой вертикальный стержень. В этом
случае существует одна точка устойчивого равновесия слева (х < 0), а другая—справа (х > 0),
но вертикальное положение равновесия (ж = 0) неустойчиво. Когда материальная точка
заданной массы немного сместится от этого положения неустойчивого равновесия,
внутренняя сила, действующая на данную материальную точку, является отталкивающей, а не
притягивающей; это соответствует отрицательному значению к в уравнении A3). Если
периодическая сила приложена к массе [например] осциллирующим электромагнитным полем,
причем колебания в данной системе заглушает сопротивление воздуха, то уравнение A3)
при &<0, носс>0и/?>0 является вполне приемлемой разумной математической
моделью для функции, выражающей горизонтальное смещение x(t) материальной точки
в такой .модели.
6.5. Хаос в динамических системах 601
При отсутствии демпфирования и внешней силы траектории свободных колебаний
материальной точки заданной массы на фазовой плоскости похожи на показанные на рис. 6.4.12
(см. задачу 14 в разделе 6.4). Материальная точка заданной массы ведет себя так, как будто
она отталкивается неустойчивой точкой равновесия при х = 0, но притягивается каждой из
двух устойчивых точек равновесия, симметрично расположенных по обе стороны от начала
координат.
В разделе 3.6 мы видели, что в линейном случае периодическая внешняя сила F(t) ==
= Focosut вызывает (вынужденные) установившиеся периодические колебания x(t) =
= С cos(u;t — а) с той же самой частотой ш. Амплитуда С установившихся периодических
колебаний пропорциональна амплитуде Fo внешней силы. Например, если амплитуда
периодической внешней силы удвойся, то единственное изменение колебаний будет состоять
в том, что их амплитуда также удвоится.
Чтобы проиллюстрировать весьма отличное поведение нелинейной системы, мы
полагаем к = — 1ит = с = /3 = и; = 1ъ уравнении A3), так что дифференциальное уравнение
принимает вид
х" + х' - х + х* = F0 cos t. A4)
В качестве упражнения проверьте, что две устойчивых точки равновесия имеют координаты
(-1,0) и A,0). Мы хотим исследовать зависимость (возможно установившихся
периодических) колебаний x(t) от амплитуды Fo периодической внешней силы с периодом 2тг/о; = 27г.
На рис. 6.5.13-6.5.16 показаны решения уравнения A4), полученные при
последовательных значениях Fo = 0,60, 0,70, 0,75 и 0,80 амплитуды внешней силы. В каждом случае
система была решена численно при начальных условиях х@) = 1, х'@) = 0, причем для
полученного решения был вычерчен график в интервале 100 ^ t ^ 200 (чтобы показать
устойчивый периодический ответ, остающийся после того, как затухла начальная
переходная составляющая). Часть (а) каждого рисунка показывает траекторию на фазовой плоскости
х = x(t), у = х'(£), а часть (Ь) показывает фактическую интегральную кривую х = x(t) на
плоскости tx. Часть (а) показывает качественный характер решения более ярко, но часть (Ь)
позволяет определить период и частоту решения.
Уравнение Дуффинга A4)
при F0 = 0,60
-1.5
-1.5-1.0-0.5 0.0 0.5 1.0 1.5
х
Рис. 6.5.13, а. Период 2п
ответных колебаний при Fo =
= 0,60: траектория на фазовой
плоскости
Уравнение Дуффинга A4)
при F0 = 0,60
U
-1.51
100 120 140 160 180 200
Рис. 6.5.13, Ь. Период 2тг
ответных колебаний при F0 = 0,60:
решение x{t)
602 Глава 6. Нелинейные системы и явления
Уравнение Дуффинга A4)
при F0 = 0,70
1.5
1.0
0.5
ps 0.0
-0.5
-1.0
-1.5-1.0-6.5 0.0 0.5 1.0 1.5
х
Рис. 6.5.14, а. Период 4п
ответных колебаний при Fq =
= 0,70: траектория на фазовой
плоскости
Уравнение Дуффинга A4)
при F0 = 0,75
Игк^
1.5
1.0
0.5
psO.O
-0.5
-1.0
"^-l .5-1.0-0.5 0.0 0.5 1.0 1.5
х
Рис. 6.5.15, а. Период 8п
ответных колебаний при Fo =
= 0,75: траектория на фазовой
плоскости
Уравнение Дуффинга A4)
при F0 = 0,70
1.0
100 120 140 160 180 200
t
Рис. 6.5.14, b. Период 47г
ответных колебаний при Fo = 0,70:
решение x{t)
Уравнение Дуффинга A4)
npHF0 = 0#75
T
1#100 120 140 160 180 200
t
Рис. 6.5.15, b. Период 87Г
ответных колебаний при F0 = 0,75:
решение x(t)
На рис. 6.5.13 показано простое колебание материальной точки заданной массы вокруг
правой точки равновесия, причем период равен 27г. На следующей последовательности
рисунков мы видим последовательное удвоение периода и, наконец, хаос при увеличении
амплитуды внешней силы в интервале от Fo = 0,6 до Fo = 0,8. Этот переход от удвоения
периода к хаосу—общий (обычный) характер поведения нелинейной механической системы
в ответ на увеличение или уменьшение соответствующего физического параметра (например
т, с, к, /3, Fo или и в уравнении A3)). Никакого подобного явления не происходит в линейных
системах.
6.5. Хаос в динамических системах 603
Уравнение Дуффинга A4)
при F0 = 0,80
-1.5
-1.5-1.0-0.5 0.0 0.5 1.0 1.5
х
Рис. 6.5.16, а. Хаотический
ответ при Fo = 0,80: траектория
на фазовой плоскости
Уравнение Дуффинга A4)
при F0 = 0,80
1 ш!
300
Рис. 6.5.16, Ь. Хаотический
ответ при Fo = 0,80: решение
x(t)
Проект 3. Используйте утилиту построения графиков решений обыкновенных
дифференциальных уравнений, чтобы убедиться, что вы можете воспроизвести рис. 6.5.13-6.5.16.
Затем исследуйте значения параметра в интервале 1,00 ^ Fp ^ 1,10 в случае постоянной
силы в уравнении A4). При Fo = 1,00 вы должны увидеть период б7г для той траектории на
фазовой плоскости, внутри которой находятся обе устойчивые точки равновесия (а также
неустойчивая). Удвоение периода начинается примерно при F0 = 1,07, а хаос наступает
примерно при Fo = 1,10. Можете ли вы увидеть второе удвоение периода где-нибудь между
Fo = 1,07 и Fo = 1,10? Начертите траектории на фазовой плоскости и интегральные кривые
на плоскости tx9 с помощью которых вы сможете измерить периоды.
Предупреждение. Вы не должны ожидать, что ваши аппаратные средства и
программное обеспечение для решения обыкновенных дифференциальных уравнений смогут создать
точную во всех деталях копию "хаотической путаницы", показанной на рис. 6.5.16. Чтобы
объяснять почему, давайте расмотрим уравнение Дуффинга в случае вынужденных
колебаний (т. е. уравнение A4)) при Fo = 0,80 как систему с входом и выходом, на вход которой
подается начальная точка (х@), #'@)), а на выходе получается соответствующее решение
x(i). Эта система с входом и выходом является хаотической в том смысле, что очень
маленькие изменения на входе могут стать причиной очень больших изменений на выходе.
Например, данные, показанные втаблице на рис. 6.5.17, были сгенерированы с помощью
сложной программы ode4 5 для численного решения дифференциальных уравнений,
входящей в пакет Matlab, причем вычисления велись для двух близлежащих начальных точек
и двух различных значений настроек (в качестве настройки был выбран параметр допустимая
погрешность). Повторное численное решение той же самой задачи Коши (задачи с
начальными условиями) при различных-иначениях допустимой погрешности может обеспечить
некоторый признак надежности результатов; существенные же расхождения, несомненно,
свидетельствуют о небольшой надежности. При начальных условиях х@) = 1, #'@) = 0
вполне вероятно (хотя едва ли на такое решение можно полагаться), что хA00) я* —1,1
и жB00)« — 0,6, но значение х C00) кажется весьма сомнительным. Ну а вот при начальных
условиях х@) = 1,000001, х'@) = 0 кажется вполне возможным, что хB00) « —0,3. Но
если так, то налицо существенное изменение решения при изменении начальных условий
604 Глава 6. Нелинейные системы и явления
llilllWll^
0
100
200
300
1
-1,1125
-0,5823
-1,2850
1
-1,1125
-0,5828
-0,1357
1,000001
.-1,1125
-0,2925
-0,0723
1,000001
-1,1125
-0,2816
-0,1633
Рис. 6.5.17. Матъав пытается найти приближенно^ решение уравнения Дуффин-
га в случае вынужденных колебаний х" + х' — х 4- х3 = @,80) cos t на интервале
0 ^ t ^ ЗООприх'(О) = 0 и два различных значения х@) при двух различных
допустимых погрешностях (ErrTol обозначает значение, используемое и для абсолютной,
и для допустимой относительной погрешности в программе ode 45)
не более чем можно было бы ожидать за счет накопления ошибок округления в процессе
численной аппроксимации, в ходе которой действия выполняются по правилам машинной
арифметики. В этом случае любое решение, полученное численным методом, вероятно,
может заметно отличаться от точного решения на длинном временном интервале.
Следовательно, мы не можем быть уверены в том, что касается тонкой структуры траектории,
вычисленной с помощью численного метода. Так что мы не можем быть уверены в том,
что, например, траектория, подобная приведенной на рис. 6.5.16, отображает все детали
точной траектории. В исследованиях, подобных проведенному нами, устанавливается,
например, только то, что фактическое решение на длинном интервале с начальными условиями
х@) = 1, х'@) = 0 не является периодическим, а вместо этого "блуждает" назад и вперед
по-видимому непредсказуемым или хаотическим способом. Таким образом, качественная
картина решения, показанного на рис. 6.5.16, помогает дать приблизительное представление
о поведении решения в действительности, но ни в коем случае не может рассматриваться как
абсолютно точное изображение всех деталей точной траектории. Это поведение решений
уравнения Дуффинга в случае вынужденных колебаний еще не понято полностью и
продолжает оставаться актуальной темой научных исследований, ведущихся в настоящее время.
Интересное описание и дальнейшие ссылок можно найти в главе 15 книги Дэна Шуолба (Dan
Schwalbe) и Стэна Уогона (Stan Wagon) VisualDSolve, изданной в Нью-Йорке издательством
Springer- Verlag в 1997 году.
Странный аттрактор Лоренца
Подстановка х\ = х, Х2 = х' в уравнение Дуффинга в случае вынужденных колебаний A3)
приводит к двумерной нелинейной системе дифференциальных уравнений первого порядка,
а явление удвоения периода характерно для таких систем. Но в более высоких измерениях
происходят даже еще более экзотические явления; в настоящее время в этой области ведутся
обширные активные исследования. Все эти исследования в конечном счете берут начало от
первоначального исследования экстраординарной трехмерной нелинейной системы,
которую рассматривал специалист по математическим методам в метеорологии Э. Н. Лоренц
(Е. N. Lorenz), который позже описал свое открытие следующим образом.
6.5. Хаос в динамических системах 605
К середине 1950-х годов, несмотря на довольно низкое качество получаемых
результатов, вошло в моду "численное предсказание погоды", т. е. прогноз на
основании численного интегрирования доступных для обработки приближений
к уравнениям, описывающим состояние атмосферы. Маленькая, но решительно
настроенная группа ученых поддерживала статистические методы
предсказания (...). Я скептически относился к этой идее и решил проверить ее, применив
статистический метод к множеству искусственных данных, полученных при
численном решении некоторой системы уравнений (...)• Первая задача
состояла в том, чтобы найти подходящую систему уравнений, которую можно было
бы решить (...)• Требовалось, чтобы она была достаточно простой ... и имела
непериодическое общее решение, так как при выявлении периодичности
статистическое предсказание периодического ряда стало бы тривиальным делом
(...). [Во время бесед с доктором Барри Зальцманом (Dr. Barry Saltzman)] он
показал мне одну работу по тепловой конвекции, где им использована система из
семи обыкновенных дифференциальных уравнений. Большинство полученных
им численных решений быстро приобретало периодический характер, но одно
решение отказывалось устанавливаться. Кроме того, оказалось, что в этом
решении четыре переменных приближаются к нулю. Можно было предположить,
что уравнения, которые управляют остальными тремя неизвестными, после
исключения из них членов, содержащих первые четыре переменные, также будут
иметь непериодические решения. По возвращении я решил эти три уравнения на
нашем компьютере и подтвердил непериодичность, на которую указывал
Зальцман. В конце концов дело пошло. [Цитируется по книге Е. Hairer, S. P. Norsett,
G. Wanner, Solving Ordinary Differential Equations Is. (Книга издана в Нью-Йорке
издательством Springer-Verlag в 1987 году)9.]
8 Внимательный читатель (склонный к математической логике) здесь, конечно, заметит (и, надеюсь, простит)
небольшую прямолинейность перевода. Следовало бы говорить, конечно, не о том, что это цитата из указаной
книги (на английском языке!), а о том, что это перевод цитаты, взятой из указанной книги. Вот
библиографическая ссылка на работу Лоренца, из которой взята цитата: Е. N. Lorenz. On The prevalence of aperiodicity in
symple systems, Global Analysis, Calgary 1978, M. Grmela and J. E. Marsden (eds.), Lecture Notes in Mathematics,
vol. 755, p. 53-75, 1979. - Примеч. ред.
9 А в 1990 году издательство "Мир" выпустило ее перевод: Э. Хайрер, С. Нерсетт, Г. Ваннер. Решение
обыкновенных дифференциальных уравнений. Нежесткие задачи. Пер. с англ. (М.: Мир, 1990). В связи с этим
для читателей, склонных к математической логике и разбирающихся во всех тонкостях искусства перевода,
замечу, что было бы совершенно легкомысленно перевести предыдущее предложение из основного текста так:
Цитируется по книге Э. Хайрер, С. Нерсетт, Г. Ваннер. Решение обыкновенных дифференциальных уравнений.
Нежесткие задачи. Пер. с англ., М.: Мир, 1990. Все дело в том, что я переводил цитату в том виде, в котором
она приведена в оригинале переводимой книги, а там она приведена с купюрами! Купюры есть и в переводе,
выполненном изд-вом "Мир", но расстановка купюр совпадает лишь частично! Как переводчик я
добросовестно выполнил перевод, а как редактор проверил его! Но раз уж разговор пошел о достоверных исторических
фактах, я не могу оставить читателя в неведении относительно того, какие именно мнения или факты были
при этом опущены, тем более что это позволяет проследить, что занимало мысли в те далекие (уже!) 1950-е
годы, а теперь кому-то может показаться очевидным. Так вот, когда говорится о том, что "группа ученых
поддерживала статистические методы предсказания", указывается возможная причина такой приверженности:
"вероятно, вследствие неправильного истолкования одной статьи Винера". Далее, когда Э. Н. Лоренц говорит
о поиске подходящей (достаточно простой имеющей непериодическое общее решение) системы уравнений,
которую можно было бы решить, он считает важным отметить, что "Возможность соединения этих условий
была далеко не очевидной (...)". Ну и последний опущенный факт: д-р Барри Зальцман к 1978 году перешел
работать в Йельский университет. — Примеч. ред.
606 Глава 6. Нелинейные системы и явления
Знаменитая система дифференциальных уравнений Лоренца имеет вид
dx
- = -sx + sy,
dy
— = —XZ + ГХ -
dt
dz
^=xy-bz.
-у,
A5)
Интегральная кривая в пространстве xyz лучше всего визуализируется, если смотреть на ее
проекцию на некоторую плоскость, обычно на одну из трех координатных плоскостей. На
рис. 6.5.18 показана проекция решения на плоскость xz, полученная численным
интегрированием при значениях параметров Ъ = |, 5 = 10, г = 28 и начальных значениях х@) = —8,
?/@) = 8иг@) = 27.
Если за созданием проекции, изображенной на рис. 6.5.18, проследить в "реальном
времени", то может показаться, что точка P(x(t), y{t), z(t))9 двигающаяся по решению,
совершает случайное число колебаний справа, после чего следует случайное число колебаний
слева, затем случайное число колебаний справа, после чего опять следует случайное
число колебаний слева и т. д. Учитывая метеорологическое происхождение системы Лоренца,
естественно подумать о случайном числе ясных дней, после которых следует случайное
число дождливых дней, затем случайное число ясных дней, после которых опять наступает
случайное число дождливых дней и т. д.
Более подробное рассмотрение таких проекций траекторий Лоренца показывает, что
точка не просто колеблется назад и вперед вокруг пары точек равновесия (как можно
первоначально предположить, глядя на рис. 6.5.18). Вместо этого, при t —> +оо, точка решения
P(t) на траектории блуждает назад и вперед в пространстве, приближаясь все ближе и ближе
к некоторому сложному множеству точек, детальная структура которого полностью все еще
не понята. Это неуловимое множество, которое, кажется, каким-то загадочным способом
"притягивает" точку решения как раз и есть знаменитый странный аттрактор Лоренца.
Проект 4. Сначала используйте утилиту для построения графиков решений
обыкновенных дифференциальных уравнений, чтобы воспроизвести хг-проекцию траектории
Лоренца, показанную на рис. 6.5.18. Используйте значения параметра и начальные условия,
указанные сразу после уравнения A5), и численным методом проинтегрируйте систему
Лоренца на интервале 0 S t ^ 50. Начертите также ху- и уг-проекции этого же самого
решения. Затем поэкспериментируйте с различными значениями параметра и начальными
условиями. Например, сможете ли вы найти периодическое решение при г = 70 (и b = |,
s — 10 как прежде) и начальных значениях хо = — 4 иго = 64. Чтобы получить траекторию,
которая почти повторяет себя, потребуется испробовать различные значения у0 в диапазоне
0 = 2/о^ 10 и рассмотреть xz-проекции, подобные приведенной на рис. 6.5.18.
6>5l Хаос в динамических системах 607
50
Странный аттрактор Лоренца
п—i—г
J I L
1 1 Г
J 1 L
-20
-10
0
х
10
20
Рис. 6.5.18. Проекция
траектории Лоренца на плоскость xz
при-20^х 5^20,0^ z^ 50
Лента Росслера
Рис. 6.5.19. Проекция ленты
Росслера на плоскость ху
Проект 5. Есть еще одна очень интенсивно изучаемая нелинейная трехмерная система—
система Росслера
dx
dy
A6)
dz
Ht
b + z(x — c).
На рис. 6.5.19 показана проекция наплоскость ху ленты Росслера. Этот хаотический
аттрактор получается при значениях параметров а = 0,398,6 = 2ис = 4 в системе уравнений A6).
В плоскости ху лента Росслера выглядит как петля, но в пространстве она оказывается
перекручена подобно ленте Мебиуса. Исследуйте удвоение периода при приближении к хаосу,
который происходит в системе Росслера при увеличении параметра а, причем для начала
положите а = 0,3, а = 0,35 и а = 0,375 (возьмите 6 = 2ис = 4во всех случаях).
В этом разделе мы дали только почувствовать вкус идей, которые являются фокусом
современных приложений нелинейных систем. Чтобы увидеть, как эти идеи работают в
полную силу, прочтите обсуждение системы Лоренца на страницах 117-123 книги Е. Hairer,
S. P.Norsett, G. Wanner, Solving Ordinary Differential Equations I10.] (Мы упоминали эту книгу
раньше, когда описывали открытие Э. Н. Лоренцем его экстраординарной трехмерной
нелинейной системы.) Там вы найдете описание траектории Лоренца, визуально представленное
изображением, которое очень походит на диаграмму ветвления, показанную на рис. 6.5.9,
вместе с той же самой константой Фейгенбаума 4,6692 ...!
Те, кто заинтересовался историческими фактами, относящимися к данному
заключительному разделу главы 6, могут обратиться к книге Джеймса Глейка (James Gleick) Chaos:
Making a New Science (Хаос: создание новой науки), изданной в Нью-Йорке в 1987
году издательством Viking Press. Более детально уравнение Дуффинга в случае вынужден-
10 Как я уже упоминал, есть перевод на русский язык: Э. Хайрер, С. Нерсетт, Г. Ваннер. Решение обыкновенных
дифференциальных уравнений. Нежесткие задачи. Пер. с англ. (М: Мир, 1990). —Примеч. ред.
608 Глава 6. Нелинейные системы и явления
ных колебаний, а также уравнения Лоренца и Росслера обсуждаются в книге Томпсона
(J. М. Т. Thompson) и Стюарта (Н. В. Stewart) Nonlinear Dynamics and Chaos, посвящецной
нелинейной динамике и хаосу (эта книга была издана в Нью-Йорке в 19 86 году издательством
John Wiley).
ГЛАВА
Методы
преобразования
Лапласа
7.1. Преобразования Лапласа и оригиналы
функций (обратные преобразования)
В главе 3 мы видели, что линейные дифференциальные уравнения с постоянными
коэффициентами имеют многочисленные приложения и могут быть решены
систематическими методами. Однако есть общие ситуации, в которых предпочтительны альтернативные
методы, рассматриваемые в данной главе. Возьмем, например, дифференциальные
уравнения
тх" + сх' + kx = F(t)
Ы" + RI' + -^1 = E'(t),
которые соответственно описывают систему, состоящую из материальной точки заданной
массы, закрепленной на пружине, с демпфером, и последовательную RLC-цепь, состоящую
из сопротивления, индуктивности и конденсатора. На практике часто случается, что
свободный член, F(t) или E'(t)y имеет разрывы, например, когда напряжение, прилагаемое
к электрической цепи, периодически выключается и включается. В этом случае методы
главы 3 могут быть весьма неуклюжими, а метод преобразования Лапласа удобнее.
Дифференциальный оператор D может рассматриваться как преобразование, в
результате применения которого к функций f(t) получается новая функция D{f(t)} = /'(£).
Преобразование Лапласа L содержит операцию интегрирования и приводит к новой функции
М/(*)} = F(s) 0T новой независимой переменной s. Схематически такое преобразование
изображено на рис. 7.1.1. После того как в этом разделе мы научимся вычислять
преобразование Лапласа (изображение по Лапласу) F(s) функции /(£), в разделе 7.2 мы увидим,
что преобразование Лапласа преобразовывает дифференциальное уравнение с неизвестной
функцией f(t) в алгебраическое уравнение относительно F(s). Поскольку, вообще говоря,
поиск решений алгебраических уравнений проще, чем поиск решений дифференциальных
уравнений, этот метод упрощает задачу нахождения решения /(£).
610 Глава 7. Методы преобразования Лапласа
dw» =ло
L{/W> -^W
Рис» 7.1.1. Преобразование
функции: L действует
аналогично D
Определение. Преобразование Лапласа (изображение функции по
Лапласу)
Пусть функция f(t) определена для всех t ^ 0. Тогда преобразование Лапласа
(изображение по Лапласу) функции / представляет собой функцию F9 определенную
следующим образом:
роо
> F(s) = L{/(t)} = e-«№dt
Jo
для всех значений s, для которых несобственный интеграл сходится.
A)
Вспомните, что несобственный интеграл по бесконечному интервалу определен как
предел интегралов по ограниченным интервалам; иными словами,
poo rb
g(t)dt= lim g(t)dt.
h ь->°°1а
B)
Если предел в B) существует, то мы говорим, что несобственный интеграл сходится; в
противном случае говорят, что он расходится или не существует. Обратите внимание, что
подынтегральное выражение несобственного интеграла в A) содержит параметр s в
дополнение к переменной интегрирования t. Поэтому когда интеграл в A) сходится, он сходится
не просто к какому-нибудь числу, а к функции F от s. Как и в следующих примерах, несоб-
7.1. Преобразования Лапласатщжмнаш функций... 611
ственный интеграл в определении L{/(£)} сходится для некоторых значений s и расходится
для других.
Пример 1
При/(£) = 1для£ ^ 0 по определению преобразования Лапласа A) имеем
роо
L{1} = iTstdb^
Jo
1
--е
s
■St
lim
b—юо
■le-^ + i
и поэтому
L{1} = - для s > 0.
5
C)
Как показано в C), рекомендуется указывать область определения
преобразования Лапласа — как в задачах, так и в примерах. Кроме того, в этом
вычислении мы использовали обычное сокращение
\g(t)}°° = lim \g(t)]b.
L J a b—*oo L J a
D)
Замечание. Предел, который мы вычислили в примере 1, не существует, если s < 0,
поскольку тогда (l/s)e~bs было бы неограниченным при, Ь —► +оо. Следовательно, L{1}
определен только для s > 0. Это типично для преобразований Лапласа (изображений по
Лапласу); область определения преобразования имеет обычно форму s > а для некоторого
числа а. ■
Пример 2
При f(t) = eat Щя'Ь^ Омы получаем
гоо гоо
L{eat} = e~steat dt = e^s~a)t dt =
Jo v Jo
0 — (s—a)t
s — a
t=o
Если s — a > 0, то e ^s a^ —► 0 при t —► -foo, поэтому
1
L{e«<} =
5 — a
для s > a.
E)
Обратите внимание, что несобственный интеграл, дающий L{eat},
расходится при s й а. Стоит также отметить, что формула E) справедлива,
если a — комплексное число. Для a = a + i/?,
£-(8-0I _ ^pt^-is-ayt
о
при£ —► Н-ооприуслоВии,что5 > a = Ые(а);ведьег/3* = cos/3t+i sin/3t.
Преобразование Лапласа (изображение по Лапласу) L{ta } степенной функции наиболее
удобно выразить через гамма-функцию Г (х), которая определена для х > 0 формулой
>
ГОС
Jo
е~*е-х dt.
(в)
612 Глава 7. Методы преобразования Лапласа
Элементарные сведения о Т(х) приведены в том подразделе раздела 8.5, который посвящен
гамма-функции; там показано, что
ГA) = 1 G)
ичто
Т(х + 1) = хГ(х) (8)
для х > 0. Из этого следует, что при положительном целом п
Т(п + 1) = пТ(п) =
= п-(п- 1)Г(га - 1) =
= п • (п - 1) • (п - 2)Г(п - 2) =
= п(п - 1)(п - 2) •• -2 -ГB) =
= п(п-1)(п-2)---2-1-ГA);
таким образом,
>► Г(п + 1) = п!, (9)
если п—положительное целое число. Поэтому функция Г(х + 1) определена и непрерывна
для всех х > — 1, причем ее значения на натуральных значениях аргумента х = п равны
факториалам целых чисел.
Пример 3
Предположим, что f(t) = ta, где а вещественно, причем а > — 1. Тогда
J'OO
e-sttadt.
о * ,
Если в этом интеграле подставить и = st9 t = u/s и dt = dt//s, мы
получим
ь{п=^Ге~ии0^=Е^ (io)
для всех s > 0 (так что и = st > 0). Поскольку Г(п + 1) = га!, если п —
неотрицательное целое число, то
Ь{П = ^ГГ Для 5>0. A1)
Например,
Как и в задачах 1 и 2, эти формулы могут быть получены непосредственно
из определения, без использования гамма-функции. ■
7.1. Преобразований Лапласа и Оригиналы функций ... 613
Линейность преобразований
Нет необходимости очень углубляться в вычисления преобразований Лапласа (изображений
по Лапласу), исходя непосредственно из определения. Как только мы знаем преобразования
Лапласа (изображения по Лапласу) нескольких функций, мы можем комбинировать их,
чтобы получить преобразования других функций. Причина состоит в том, что преобразование
Лапласа является линейной операцией.
Теорема 1
Линейность преобразования Лапласа
Если а и Ь — константы, то
>► L{af(t) -h bg(t)} = aL{/(*)} + bL{g(t)} A2)
для всех s, таких что существуют оба преобразования Лапласа (изображения по Лапласу)
функций / и д. ^ А
Доказательство теоремы 1 следует немедленно из линейности операций взятия пределов
и интегрирования:
роо
L{af(t) + bg(t)} = e~at [af(t) + bg(t)} dt =
Jo
= lim \Ce-8t[af(t) + bg(t)}dt =
c-kx>J0
= a Mim^ f e~stf(t) dt\ + b (lim [ e-stg{t) dt\ =
= ab{f(t)} + bL{g(t)}.
Пример 4
Вычисление L{£n/2} базируется на известном частном значении
Г Q) = 0F A3)
гамма-функции. Например, из этого следует, что
г(§ИгA)-ИгEИ^
поскольку формула Г (ж + 1) = хГ(х) в (9) сначала применяется при
х = |, а затем при х = |. Теперь формулы A0)-( 12) дают
614 Глава 7. Методы преобразования Лапласа
Пример 5
Известно, что cosh kt = (ekt+e kt)/2.Ecimk > 0,тотеор1ШЩ1Т^||Щ1
вместе дают
иными словами,
Точно так же
L{cosh kt}
L{sinh kt}
s2 - kg
к
для $ > к > 0.
для 5 > А: > 0.
A4)
A5)
s2-k2
Поскольку cos kt = (eikt -f е~гЫ)/2, формула E) (при а = ife) приводит к
25
Tf ,, 1/ 1 1 \ 1
Llcosfct} = - + — = -
1 J 2\s-ik s + ik) 2
(ikJ
и, таким образом,
L{cos kt} =
для s > 0.
(i6)
s2 + k2
(Область определения следует из условия s > Re(ifc) = 0.) Точно так же
Jfe
L{sin kt}
s2 + k2
дляв > 0.
A7)
Пример б
Применяя линейность, формулу A6) и знакомое тригонометрическое
тождество, получаем
L{3e2* + 2 sin2 3*} = L{3e2t + 1 - cos 6t} =
3 1 а
s - 2 + s s2 + 36
3s3 + 144s - 72
ф-2)(з2+36)
ДЛЯ 5 > 0.
Оригиналы функций (обратные преобразования)
Согласно теореме 3 из этого раздела, никакие две различные непрерывные для всех t ^ 0
функции не могут иметь то же самое преобразование Лапласа (изображение по Лапласу).
Таким образом, если F(s) — преобразование некоторой непрерывной функции /(£), то f(t)
определена однозначно. Это наблюдение позволяет нам дать следующее определение: если
F(s) = L{/(£)}, то функцию f(t) мы называем обратным преобразованием Лапласа
функции (оригиналом функции) F(s) и пишем
f(t) = L-l{F(s)}.
A8)
7.1. Преобразования Лагаяашмщмгташ функций;.Г 615
Пример
L- {?}=¥■ L"' Ш - --*> ^Ш} -!*°з<-
ит.д. ■
Система обозначений: функции и их преобразования (образы, изображения).
Всюду в этой главе мы обозначаем функции от t буквами нижнего регистра. Преобразование
(образ, изображение) функции будет всегда обозначаться тем же самым символом верхнего
регистра (т. е. той же самой, но не строчной, а прописной буквой). Таким образом F(s) —
преобразование Лапласа (изображение по Лапласу) функции /(£), a x(t) — обратное
преобразование Лапласа (оригинал) функции X (s).
.1 \,Х 1^-\^ШШ№^**?:\^
1
t
tn (n^O)
ta (a > -1)
eat
cos kt
sin kt
cosh *£
sinh *t
u(t — a)
1
s
1
32
n!
Sn+1 •
Г(а+1)
sa+l
1
s — a
s2 + A:2
A:
s2 + *2
s
^^Ifc2
*
s2-*2
e~as
(S>0)
(S>0)
>>0)
(s>0)
(s>0)
(*>0)
(s>0)
(s > |*|)
(a > |*|)
>>o)
Рис. 7.1.2. Краткая таблица
преобразований Лапласа
(изображений по Лапласу)
f -
\ Таблица преобразований Лапласа (изображений по Лапласу) используется подобно
таблице интегралов. В таблице на рис. 7.1.2 перечислены преобразования (образы, изображе-
| ния), полученные в этом разделе; много дополнительных преобразований (образов,
изображений) можно получить из этих немногих, если использовать различные общие свойства
\ преобразования Лапласа (которые мы обсудим в последующих разделах).
616 Глава 7. Методы преобразования Лапласа
Кусочно-непрерывные функции
Как мы заметили в начале этого раздела, мы должны научиться обращаться с некоторыми
типами разрывных функций. Функция /(£) называется кусочно-непрерывной на
ограниченном интервале а ^ t ^ Ь при условии, что интервал [а, Ъ] может быть разбит на конечное
число примыкающих подынтервалов таким способом, что
1. / непрерывна в каждом из этих подынтервалов;
2. / (t) имеет конечный предел, когда t изнутри приближается к каждой конечной точке *
каждого подынтервала.
Мы говорим, что функция / кусочно непрерывна для t ^ 0, если она кусочно непрерывна на
каждом ограниченном подынтервале [0, -Ьоо). Таким образом, кусочно-непрерывная
функция имеет только простые разрывы (если она их вообще имеет) и только в изолированных
точках. В таких точках значение функций испытывает конечный скачок, как показано на
рис. 7.1.3. Скачок функции /(£) в точке с по определению равен /(с+) — /(с—), где
/(с+)= lim /(с + е) и /(с-) = lim /(с- е).
€-*0+ €-*0+
Вероятно, наиболее простой кусочно-непрерывной (но разрывной) функцией является
единичная ступенчатая функция (функция Хевисайда), график которой приведен на
рис. 7.1.4. Она определяется следующим образом:
«(*) =
0 для£<0,
1 для^О.
A9)
Поскольку u(t) = 1для£ ^ 0 и поскольку преобразование Лапласа (изображение по
Лапласу) содержит только значения функции для t ^ О, мы немедленно получаем, что
L{u(t)} = - (в > 0).
B0)
График единичной ступенчатой функции (функции Хевисайда) ua(t) = u(t — а) приведен
на рис. 7.1.5. Она терпит разрыв (скачок) при t = а, а не при t = 0; вот эквивалентное
а. о "
Рис* 7,1.3, График кусрчно-
непрерывной функции;
мирные точки указывают значения
функции в точках разрывах
@,1)
и@
Рис. 7Дь4. График единичной
ступенчатой функции (функции
Хевисайда)
7.1. Преобразования Лапшеа и оригиналы функций ... 617
(fl,i)i-
ua(t)=u(t-a)
Рис. 7.L5. Единичная
ступенчатая функция (функция Хеви-
сайда) иа {t) имеет скачок в
точке t =f a.
определение:
ua(t) =ru(t — a)= <
для£ < а,
для£ ^ а.
B1)
Пример 8
Найдем L{ua(t)}9 если о > 0.
Решение Мы начинаем с определения преобразования Лапласа (изображения по
Лапласу). Мы получаем
рОО рОО
L{ua(t)} = e~stua(t) dt = e"st eft = lim
JO Ja b->°°
э-stl
t=a
следовательно,
LKW} =
(s > 0, a > 0).
B2)
Общие свойства преобразований
Из курса анализа (дифференциального и интегрального исчисления) хорошо известно, что
интеграл
f g(t)dt
Ja
существует, если функция д кусочно непрерывна на ограниченном интервале [a, b].
Следовательно, если / кусочно непрерывна для t ^ 0, то интеграл
[ e~stf(t)dt
Jo
существует для всех Ъ < +оо. Но чтобы существовал F(s) — предел этого последнего
интеграла при Ь —► + оо, — необходимо наложить некоторое дополнительное условие,
ограничивающее скорость роста f(t) при t —► 4-оо. Говорят, что функция / имеет экспоненциальный
порядок при t —► +оо, если существуют неотрицательные константы М, с и Т, такие что
|/@1 ^Мес* для^Т.
B3)
618 Глава 7. Методы преобразования Лапласа
Таким образом, функция имеет экспоненциальный порядок при условии, что она растет (при
t —► +00) не быстрее, чем некоторая экспоненциальная функция с линейным показателем
степени, умноженная на некоторое постоянное число. Конкретные значения констант М, с
и Т не важны. Что действительно важно, так это существование некоторых таких значений,
чтобы удовлетворялось условие B3).
Каждый многочлен p(t) имеет экспоненциальный порядок, причем в B3) можно
положить М = с = 1; это следует из того факта, что р(£)/е* —» 0 при t —► +06. Функция
g(t) = е* — пример функции, которая не имеет экспоненциального порядка, потому что
lim — = ton e
t—>oc ect t—*oo
f-ct
= +00,
условие B3) не может быть выполнено ни для какого [конечного] значения М. Условие B3)
просто означает, что f{t)/ect ограничена для достаточно больших t. В частности, любая
ограниченная функция, например cos Ы или sin ki, имеет экспоненциальный порядок.
Теорема 2
щгшзса'' ""'
У^&^а^
Ш^&Ш$к& шШ$м>Шш
Если функция /кусочно непрерывна для t ^ 0 и имеет экспоненциальный порядок при
t 7-* 4-00, то ее преобразование Лапласа (изображение по Лапласу) F(s) = L{f(t)}
существует. Более точно, если / кусочно непрерывна и удовлетворяет условию B3), то F(s)
существует для всех s > с.
Доказательство. Сначала заметим, что мы можем взять Т =? О в B3). Поскольку наша
функция кусочно непрерывна, ее модуль \f(t)\ ограничен на [О, Т]. Поэтому, увеличивая М
в B3) в случае необходимости, мы можем предположить, что \f(t)\ ^ М, если 0 й t й Т.
Поскольку ect ^ 1для£ ^ 0,то|/(£)[ ^ Mect для всех t ^ 0.
Из стандартной теоремы о сходимости несобственных интегралов, которая гласит, что
абсолютная сходимость подразумевает сходимость, следует, что достаточно доказать, что
интеграл
рОО
|е-7(«)|<й
Jo
существует для s > с. Чтобы сделать это, достаточно, в свою очередь, показать, что значение
интеграла
Г
Jo
\e-atf(t)\dt
остается ограниченным при Ь —► +оо. Но поскольку \f(t)\ й Mect для всех t ^ 0, то
' |e-et/(*)l*^':f \e-stMect\dt = M\ e^8'^ dt й
о Jo; Jo
f
Jo
<M\ e-(8~c»dt =
M
:.ТГ. С
если s > с. Это доказывает теорему 2.
7.1. Преобразования Лапласа и оригиналы функций ... 619
Мы показали, кроме того, что
JO
М
8 — С
B4)
если s > с. Если перейти к пределу при s -* +оо, мы получим следующий результат.
ГПСПРТПМС ЩЗШШШЖ
больших $
^тшёчЛшЛЛМА
Если /(£) удовлетворяет условиям теоремы 2, то
lim F(s) = 0.
B5)
А
Условие B5) сильно ограничивает класс функций, которые могут быть изображениями
по Лапласу. Например, функция G(s) = s/(s 4-1) не может быть изображением по Лапласу
любой "разумной" функции, потому что ее предел при s —* 4-оо равен 1, а не 0. Вот более
общее утверждение: рациональная функция — частное двух многочленов — может быть
(и, как мы увидим, является) изображением по Лапласу, только если степень ее числителя
меньше, чем степень ее знаменателя.
С другой стороны, условия теоремы 2 являются достаточными, но не необходимыми
условиями существования преобразования Лапласа (изображения по Лапласу) функции
/(£). Например, функция f(t) = \j\fi не является кусочно-непрерывной (в точке t = 0),
однако (пример 3 при а
-1) ее преобразование Лапласа (изображение по Лапласу)
чг*-Щ-£
существует, причем нарушено условие B4), которое подразумевает, что sF(s) остается
ограниченной при s -* +оо.
Остаток этой главы в значительной степени посвящен специальным методам поиска
решений дифференциальных уравнений. Эти методы состоят в том, чтобы сначала найти
преобразование Лапласа (изображение по Лапласу) решения такого уравнения. Поэтому
для нас жизненно знать, что преобразование Лапласа (изображение по Лапласу)
единственным образом определяет решение дифференциального уравнения; т. е. найденная функция
s имеет только один оригинал, который может быть искомым решением. Иными словами,
важно установить, что обратное преобразование Лапласа однозначно. Следующая теорема
доказана в главе 6 книги Черчилля (Churchill) Operational Mathematics, посвященной
операционным методам в математике C-е издание издано в Нью-Йоркев 1972 году издательством
McGraw-Hill).
щщ^щ
;шкт
^^шШш^шй^^шШшшШшшШ®
Предположим, что функции /(£) и g(t) удовлетворяют условиям теоремы 2, так что
изображения обеих функций по Лапласу F(s) и G(s) существуют. Если F(s) = G(s) для всех
s> с (для некоторого с), то f(t) = g(t) во всех точках непрерывности / и д на интервале
[О,+оо). А
620 Глава 7. Методы преобразования Лапласа
Таким образом, две кусочно-непрерывные функции экспоненциального порядка с тем
же самым изображением по Лапласу могут отличаться только в их изолированных точках
разрыва. Это не имеет никакого значения в самих практических приложениях, так что мы
можем рассматривать обратное преобразование Лапласа по существу как однозначное, т. е.
мы можем считать, что изображение функции по Лапласу однозначно орпределяет оригинал
функции. В частности, любые два решения дифференциального уравнения должны быть
непрерывны и, следовательно, должны быть одним и тем же самым решением, если они
имеют то же самое преобразование Лапласа (изображение по Лапласу).
Историческое замечание. Преобразования Лапласа (изображения по Лапласу)
имеют интересную историю. Интеграл в определении преобразования Лапласа (изображения
по Лапласу), вероятно, впервые появился в одной из работ Л. Эйлера. Однако в математике
общепринято называть методику или теорему именем того математика, который открыл ее
после Эйлера (в противном случае существовало бы несколько сотен различных теорем
Эйлера). В данном случае следующим после Эйлера был французский математик Пьер Сймон
де Лаплас (Pierre Simon de Laplace, 1749-1827). Именно он использовал такие интегралы
в его работе по теории вероятностей. Так называемые "операционные методы" для
нахождения решений дифференциальных уравнений, основанные на преобразованиях Лапласа
(изображениях по Лапласу), самим Лапласом не применялись. В действительности они
были обнаружены и популяризировались инженерами-практиками, особенно английским
инженером-электриком Оливером Хевисайдом A850-1925). Эти методы успешно и широко
применялись задолго до того, как была строго доказана их справедливость, и даже в начале
XX столетия их законность была в значительной мере под сомнением и по этой теме велись
ожесточенные дебаты.
7.1. Задачи
В задачах 1-10 непосредственно с помощью определения A) найдите преобразования Лапласа
(изображения по Лапласу) заданных ниже (формулой или графиком) функций.
1. /(*) = t
3. f(t) = e3t+1
5. /(£) = sinh£
7.
--#A,1)
Рис. 7.1.6
9.
Y-
/
(l.i)
Рис. 7.1.8
2. f(t) = t2
4. /(£) = cos t
6. /(£) = sin2 t
8.
A, 1) B, 1)
Рис. 7.1.7
10.
@,1)
К
A,0)
Рис. 7.1-9
7.1. Преобразования Лапласа и оригиналы функций ... 621
В задачах 11-22 с помощью преобразований, приведенных на рис. 7.1.2, найдите преобразования
Лапласа (изображения по Лапласу) указанных функций. Иногда может понадобиться
предварительное интегрирование по частям.
11. /(£) = у/1 + 3t 12. /(*) = 3*5/2 - At3
13. f(t) = t - 2e3t 14. f(t) = t3/2 - e0t
15. f(t) = 1 + cosh 5* 16. /(£) = sin 2* + cos 2t
17. /(£) = cos2 2t 18. /(*) = sin3£cos3£
19. /(t) = (l + tK 20. f(t) = tet
21. /(£) = £ cos 2t 22. /(t) = sinh2 3t
Применяя преобразования, приведенные в таблице на рис. 7.1.2, найдите оригиналы (обратные
преобразования Лапласа) функций в задачах 23-32.
23. F(s) = -| 24. F(s) = s~3/2
25. F(s) = ---^~ 26. F(s) = -!—
v ' s s5/2 w s + 5
31'F(s) = i^ 32. F(S) = 2s-1e-3s
33. Найдите преобразование Лапласа функции f(t) = sin kt методом, использованным в тексте для
вывода формулы A6).
34. Найдите преобразование Лапласа функции /(£) = sinh kt методом, использованным в тексте
для вывода формулы A4).
35. Используя табличный интеграл
ах
е
cos bx dx = ~—— (a cos bx + b sin 6ж) + С,
a -f- о
найдите L{cos fct} непосредственно по определению преобразования Лапласа (изображения по
Лапласу).
36. Покажите, что функция /(£) = sin(e* ) имеет экспоненциальный порядок при t —► Н-оо, а ее
производная не имеет экспоненциального порядка.
37. Пусть известно, что а > 0 и /(t) = 1, если 0 ^ t < а, и f(i) = 0, если t ^ а. Сначала
сделайте набросок графика функции /, выяснив ее значение при t = а. Затем выразите / через
единичные ступенчатые функции и покажите, что L{/(£)} = s_1(l — e~as).
38. Принимая, что 0 < а < 6, положите /(£) = 1, если а ^ t < b, f(t) = 0, если t < а или t ^ 6.
Сначала сделайте набросок графика функции /, выяснив ее значение при t = а и £ = 6. Затем
выразите / через единичные ступенчатые функции и покажите, что L{/(£)} = s~1(e~a8 —
- e~bs).
39. Единичная ступенчатая функция определена следующим образом:
f(t) = п, если п — 1 ^ t < n, n = 1,2,3,... .
(а) Сделайте набросок графика /, чтобы увидеть, почему ей дали такое название (имя). (Ь)
Покажите, что
/(t) = X]ti(t-n)
622 Глава 7. Методы преобразований Лапласа
для всех t ^ 0. (с) Предположите, что преобразование Лапласа (изображение по Лапласу)
^бесконечного ряда в части (Ь) может быть вычислено почленно (это действительно так). Применяя
формулу для суммы бесконечной геометрической прогрессии, получите в результате
4/(t)} =
«A-е-*)' .
40. (а) График функции / приведен на рис. 7.1.10. Покажите, что / может быть записана в форме
/(«)•= 53(-1)»«(*-п).
п=0
(Ь) Используя метод задачи 39, покажите, что
1
s(l 4- е-8)'
и
1
i
1
i
2
Рис. 7.1.10. График функции из задачи 40
41. График функции прямоугольного колебания (меандра) g (t) показан на рис. 7.1.11. Выразите g
через функцию / из задачи 40 и отсюда выведите, что
L{g.(*)}=>Al+ee-') = »tanh5-
-lr
J L
Рис. 7.1.11. График функции из задачи 41
42. Для заданных констант а и 6 определите h(t) для t ^ 0 формулой
,, ч [а, если п — 1^<пип
h(t) — <
16, если п-1ь<<пип
нечетное;
четное.
Сделайте набросок графика h и примените одну из предыдущих задач, чтобы показать, что
а + Ъе'8
HHt)} =
s(l + e-f
7.1. Преобразования Лапласа и оригиналы функций ... 623
7.1. Приложение. Преобразования Лапласа
в системах компьютерной алгебры
и оригиналы функций (обратные
преобразования)
Если f(i) = t cos 3t, то определение преобразования Лапласа (изображения по Лапласу)
дает несобственный интеграл
роо
F(s) = L{f(t)} = te~st cos St dt,
Jo
вычисление которого, казалось бы, требует утомительного интегрирования по частям.
Следовательно, для быстрого вычисления преобразований может быть весьма полезна система
компьютерной алгебры, имеющая средства для вычислений изображений по Лапласу. Maple
содержит пакет интегральных преобразований inttrans, a Mathematica содержит пакет
Calculus :LaplaceTransform.Команды системыМар1е
with(inttrans):
f := t*cos,C*t) :
F := laplace(f, t, s);
F := simplify(expand( F ));
и команды системы Mathematica
Needs["Calculus4LaplaceTransform4"]
f = t*Cos[3*t];
F = LaplaceTransform[f, t, s]
Simplify[Expand[ F ]]
позволяют немедленно вычислить преобразование Лапласа (изображение по Лапласу)
FE) = (S2-9)/E2 + 9J.
Если вы выполните эти команды, вы увидите, почему обычно полезно раскрыть скобки
(команда expand) и упростить результат (команда simplify) при вычислении
преобразования Лапласа (изображения по Лапласу). Мы можем получить оригинал f(t) с помощью
команды системы Maple
invlaplace(F, s, t);
или команды системы Mathematica
InverseLaplaceTransform[F, s, t]
(и снова при необходимости можем раскрыть скобки и упростить результат перед его
тщательным анализом).
Замечание. Обратите внимание (это очень важно!) на порядок переменных s и t
в предыдущих командах — сначала t, затем з при преобразовании; сначала 5, затем t при
обратном преобразовании (вычислении оригинала функции). ■
624 Глава 7. Методы преобразования Лапласа
Вы можете использовать эти команды системы компьютерной алгебры, чтобы проверить
ответы к задачам 11 -32 из этого раздела, а также можете решить несколько интересных задач
по вашему собственному выбору.
7.2. Применение преобразования Лапласа
к задачам Коши (задачам с начальными
условиями)
Мы теперь обсудим приложение преобразований Лапласа (изображений по Лапласу) к
поиску решений линейного дифференциального уравнения с постоянными коэффициентами
вида
ax"(t) + bx'(t) + cx(t) = f(t) A)
с данными начальными условиями х@) = хо и х'@) = х'0. Пользуясь линейностью
преобразования Лапласа, мы можем преобразовать уравнение A), выполняя преобразование
Лапласа отдельно для каждого члена уравнения, т. е. взяв изображение по Лапласу каждого
члена уравнения. Преобразованное уравнение примет вид
aL{x" (t)} + bL{x'(t)} + cL{x(t)} = L{/(*)}; B)
оно содержит преобразования производных х' и х" неизвестной функции х (t). Ключ к методу
открывает теорема 1, которая позволяет выразить преобразование производной функции
через преобразования самой функции.
Теорема 1
Преобразования производных
Предположим, что функция f(t) непрерывна и кусочно гладка для t ^ 0 и имеет
экспоненциальный порядок при t —» +оо, так что существуют неотрицательные константы М, с и Т,
такие что
|/(t)|^Mect для^Т. C)
Тогда L{f'(t)} существует для s > с, и
> L{/'(*)} = аЬ{№) - /@) = sF(s) - /@). D)
Функцию / называют кусочно-гладкой на ограниченном интервале ,[о, Ь], если она
кусочно непрерывна на [а, Ь] и дифференцируема, кроме, быть может, конечного числа точек,
причем /'(£) кусочно непрерывна на [а, Ь]. Мы можем назначить произвольные значения
/ (t) в изолированных точках, в которых / не дифференцируема. Мы говорим, что / кусочно
гладка для t ^ 0, если она кусочно гладка на каждом ограниченном подынтервале
интервала [0, +оо). На рис. 7.2.1 показано, что "углы" на графике / соответствуют разрывам ее
производной /'.
7.2. Применение преобразования Лапласа к задачам Коши ... 625
Непрерывная функция
Кусочно непрерывная производная
Рис. 7.2.1. Разрывы /'
соответствуют "углам" на графике /
Главная идея доказательства теоремы 1 демонстрируется лучше всего случаем, в котором
/'(£) является непрерывной (а не просто кусочно-непрерывной) для t ^ 0. Тогда, начиная
с определения L{f'(t)} и интегрирования по частям, мы получаем
L{f'(t)} = e-stf'(t)dt = \e~stf(t)\ +s\ e~stf(t)dt.
Jo L J*=° Jo
Учитывая условие (З), мы видим, что интегрируемый член e~stf(t) стремится к нулю (когда
s> с) при t —> +оо, и его значение в нижнем пределе t = 0 вносит вклад —/@) в значение
1федыдущего выражения. Интеграл, который остается,—это просто L{ / (t)}; по теореме 2 из
раздела 7.1 этот интеграл сходятся при s > с. Тогда отсюда следует, что L{/' (t)} существует
при s > с, и его значение можно вычислить по формуле D). Рассмотрение случая, в котором
/'(£) имеет изолированные разрывы, мы отложим до конца этого раздела.
Решение задач Коши (задач с начальными условиями)
Чтобы преобразовать уравнение A), мы должны также преобразовать вторую производную.
Если предположить, что g(t) = f'(t) удовлетворяет условиям теоремы 1, то из этой теоремы
будет следовать, что *
L{/"(t)} = L{g'(t)} = sL{g(t)} - д@) =
= -L{/'(*)}-/'@) =
= e[eL{/(t)}-/@)]-/'@),
и, таким образом,
, Hf"(t)} = s2F(s)-sf@)-f'@).
E)
626 Глава 7; Методы ^преобразования Лапласа
Повторение этого вычисления дает
L{/'"(*)} = sL{f"(t)} - /"@) = s3F(s) - 52/@) - «/'(О) - /"@). F)
После конечного числа таких шагов мы получаем следующее обощение теоремы 1.
Преобразования производных высших порядков
СЛЕДСТВИЕ
Предположим, что функции /, /', /",..., f(n ^ непрерывны и кусочно гладки для t ^ 0
и что каждая из этих функций удовлетворяет условиям вида C ) с теми же самыми значениями
Мис. Тогда L{f(n\t)} существует при s > с и
L{/W(i)} = snL{f(t)} - s"-V@) - s"-2/'@) /(""^(O) =
> =snF(s)-sn,-1/@)-----s/(°%2>@)-/(re-1)@). G)
A
Пример 1
Решим задачу Коши (задачу с начальными условиями)
х" -х'-6х = 0; ж@) = 2, ж'@) = -1.
Решение Пр>и заданных начальных значениях равенства D) и E) дают
L{x'(t)} '= sL{x(t)} - х{0) = sX(s) - 2
L{x"(t)} = s2L{z(*)} - вж@) - x'@) = s2X(s) - 2s + 1,
где (согласно нашему соглашению о системе обозначений) X(s)
обозначает преобразование Лапласа (изображение по Лапласу) (неизвестной)
функции x(t). Следовательно, преобразованное уравнение имеет вид
[s2X(s) - 2s + 1] - [sX(s) - 2] - 6 [X(s)} = 0.
Это уравнение легко упрощается:
(s2 - s - 6)Х(а) - 2s + 3 = 0.
Таким образом,
25-3 25-3
X(s)
52-5-6 (*-3)(* + 2)'
В соответствии с методом элементарных дробей (из интегрального
исчисления) существуют константы А и В, такие что
25 -3 ' _'"•..'4т В
E^3)E + 2) ~ 5-3 + 5 + 2'
7.2. Применение преобразования Лапласа к задачам Коши ...
627
а умножение обеих частей этого уравнения на (s — 3)(s -f 2) приводит
к уравнению
2s-3 = A(s + 2) + B(s-3).
Подставив 5 = 3, найдем А = |; подставив же s = —2, найдем В = |.
Следовательно,
x(s)=L{x(t)} = _i_ + _i_.
Поскольку L"{l/(s — а)} = еа*,то
*(*) = §«* + h~2t
— решение первоначальной задачи Коши (задачи с начальными
условиями). Обратите внимание, что мы сначала не находили общее решение
дифференциального уравнения. Метод преобразования Лапласа
непосредственно приводит к искомому частному решению, автоматически
учитывая—это следует из теоремы 1 и ее заключения—заданные
начальные условия. ■
Пример 2
Решим задачу Коши (задачу с начальными условиями)
х" + 4х = sin 3t; х@) = х'@) = 0.
Такая задача описывает движение системы, состоящей из материальной
точки заданной массы, закрепленной на пружине, к которой приложена
внешняя сила, как показано на рис. 7.2.2.
Решение Поскольку оба начальных значения равны нулю, уравнение E) дает
\j{x"{t)} = s2X(s). Мы находим преобразование sin3£ в таблице на
рис. 7.1.2 (раздел 7.1) и таким образом получаем преобразованное
уравнение
s2X(s)+4X(s) =
52+ 9*
Ц /@ = sin3f
*@
Рис. 7.2.2. Система, состоящая из
материальной точки заданной массы,
закрепленной на пружине, удовлетворяет
задачу Коши (задачу с начальными
условиями) из примера 2. Материальная точка
заданной массы первоначально
находится в покое в положении ее равновесия
628 Глава 7. Методы преобразования Лапласа
Поэтому
X{S) = E2+4)(*2+9)*
Метод элементарных дробей приводит к уравнению
3 Аа + В Cs + D
(s2+4)(s2 + 9) - s2+4 + s2 + 9 "
Поскольку в левой части нет слагаемых нечетной степени, мы полагаем
А = С = 0, потому что отличные от нуля значения для А или С привели
бы к появлению слагаемых нечетной степени, — но никаких таких
слагаемых в числителе слева нет. Так что мы заменяем АиС нулем, а затем
умножаем обе части на (s2 + 4) (s2 -f 9). В результате получаем тождество
3 = B(s2 + 9) + D(s2 + 4) = (В + D)s2 + (9В + 4D).
Приравняв коэффициенты при одинаковых степенях s, мы получим
линейные уравнения
В + D = О,
9В + 4J9 = 3,
из которых легко найти 2?=|и2Э = —§. Следовательно,
Поскольку L{sin 2£} = 2/(s2 + 4) nL{sin3t} = 3/(s2 + 9), то
x(t) = 3l sin 2t - \ sin 3t.
На рис. 7.2.3 показан график этой периодической (период равен 27г)
функции, дающей положение материальной точки заданной массы. Обратите
внимание, что метод преобразования Лапласа снова дает решение
непосредственно, без потребности сначала найти общее решение однородного
уравнения и частное решение первоначального неоднородного
дифференциального уравнения. Таким образом, поиск решений неоднородных
уравнений выполняется точно так же, как и однородных уравнений. ■
X
Рис. 7.2.3. Функция, дающая
положение х (t) из примера 2
7.2. Применение преобразования Лапласа к задачам Кении ..
629
Дифференциальное
уравнение
относительно x(t)
Алгебраическое
уравнение
относительно X(s)
Решение x(f)
[дифференциального
уравнения
Решение X(s)
алгебраического
уравнения
Рис. 7.2.4. Использование преобразования Лапласа
(изображения по Лапласу) для нахождения решения
задачи Коши (задачи с начальными условиями)
Примеры 1 и 2 иллюстрируют процедуру решения, которая схематически изображена на
рис. 7.2.4.
Линейные системы
Преобразования Лапласа (изображения по Лапласу) часто используются в тех технических
задачах, где требуется решить линейные системы, в которых все коэффициенты являются
константами. Когда определены начальные условия, преобразование Лапласа (замена
функций их изображениями по Лапласу) приводит такую линейную систему дифференциальных
уравнений к линейной системе алгебраических уравнений, в крторых неизвестные являются
преобразованиями функций-решений! Как иллюстрирует пример 3, методика для системы
по существу та же самая, что и для одного линейного дифференциального уравнения с
постоянными коэффициентами.
Пример 3
Решим систему
2х" = -вх + 2у,
у" ±2х-2у + 40 sin 3^
с начальными условиями
х@) = х'@) = у@) = у'@) = 0.
(8)
(9)
Решение
Таким образом, сила f(t) = 40 sin 3^ внезапно прилагается ко второй
материальной точке заданной массы (рис. 7.2.5) в момент времени t = 0,
когда система находится в покое в ее положении равновесия.
Мы пишем X(s) = L{x(t)} и Y(s) = L{y(t)}. Тогда из начальных
условий (9) следует, что
b{x"(t)} = s2X{s) и L{y"{t)} = s2Y(s).
630
Глава 7; Методы преобразования Лаплас?
к0 = 2
fllj «* %'\
т2а%
fit) = 40 sin 3t
Рис. 7.2.5. Система тел заданных
масс, закрепленных на пружинах,
удовлетворяет задаче Койги (задаче
с начальными условиями) из
примера 3. Обе материальные точки
заданных масс первоначальнонаходятся
в покое в их положениях равновесия
Поскольку L{sin 3t} = S/(s2 -f 9), преобразования уравнений (8)
приводят к уравнениям
2s2X(s) = -6X(s) + 2Y(sI
s2Y(s) = 2X{s)-2Y{s) +
120
s2 + 9*
Таким образом, преобразованная система принимает вид
';■ (s2 + 3)X(s) -Y(s) = 0,
120
A0)
-2-ВД + {s2 + 2)Y(s) =
*? + 9V
Детерминант этой пары линейных уравнений относительно X(s) и Y(s)
равен
*2 + 3 -1
-2 s2 + 2
(s2 +ty(s2 + 2) - 2 = (s2 + l)(s2 + 4),
и мы легко (например с помощью правила Крамера) находим решение
системы A0). Оказывается, что
Х(з)
120
8 3
+
(s2 + l)(s2 + 4)(s2 + 9) s2 + l s2 + 4 s2 + 9
(Па)
Y(s) =
120(s2 + 3)
10 8
+
18
(s2 + l)(s2 + 4)(s2 + 9) s2 + l s2 + 4 s2 + 9
:• (Hb)
Разложения на элементарные дроби в A1а)иA lb) легко находятся с помо-
щьюметодаизпримера2.Например,замечая, что множители знаменателя
являются линейными относительно s2, мы можем написать
120
А В
+
С
(s2 + l)(s2 + 4)(s2 + 9) s2 + l s2 + 4 s2 + 9'
7.2. Применение преобразования Лапласа к задачам Коши ... 631
а из этого следует, что
120 = A(s2 + 4)(s2 + 9) + B(s2 + l)(s2 + 9) + C(s2 + l)(s2 + 4). A2)
Подстановка s2 = — 1 (т. е. s = i) обнуляет множитель s2 + 1) в
уравнении A2) и дает 120 = А • 3 • 8, так что А = 5. Точно так же замена
s2 = -4 в уравнении A2) дает В = —8, а замена s2 = —9 дает С =
= 3. Таким образом мы получаем разложение на простые дроби, данное
в равенстве A1а).
Во всяком случае, обратные преобразования по Лапласу выражений
в уравнениях ( И а) и A1Ь) дают решение
x(t) = 5 sin t — 4 sin 2t -f sin 3t,
y(t) = 10 sin t + 4 sin 2* - 6 sin 3*.
На рис. 7.2.6 показаны графики этих двух периодических (периоды равны
27г) функций, дающих положения этих двух материальных точек
заданных масс. ■
Методика использования преобразования Лапласа
Давайте рассматривать общее уравнение второго порядка с достоянными коэффициентами
rax" -I- ex' + kx = f(t)
как уравнение движения
знакомой системы, состоящей из материальной точки заданной массы, закрепленной на
пружине, с поршнем (рис. 7.2.7). Тогда преобразованное уравнение будет иметь вид
т [s2X(s) - 8х@) - х'@)] + с [sX(s) - х@)] + kX(s) = F(a).
A3)
Заметьте, что уравнение A3) — алгебраическое уравнение — в действительности даже
линейное уравнение — относительно "неизвестного" X{s). Это и есть источник могущества
метода преобразования Лапласа (метода замены оригиналов их изображениями по Лапласу):
Линейные дифференциальные уравнения преобразуются
в легко решаемые алгебраические^ уравнения.
Рис. 7.2.6. Функции, дающие
положения x(t) и y(t) в
примере 3
Рис. 7.2.7. Система, состоящая
из материальной точки заданной
массы, закрепленной на пружине,
с поршнем, на которую действует
внешняя сила / (t)
632 Глава 7. Методы преобразования Лапласа
Решив уравнение A3) относительно X(s), получим
где
Z(s) Z(s)>
Z(s) = ms* + cs + k и l(s) = mx@)s + mx'ifi) + cx@).
A4)
Обратите внимание, что Z(s) зависит только от самой физической системы. Таким образом,
в равенстве A4) X(s) = L{x(t)} представлено как сумма слагаемого, зависящего только от
внешней силы и слагаемого, зависящего только от начальных услбвий. В случае системы со
слабым затуханием эти два слагаемых соответственно являются преобразованиями Лапласа
L{*sp(*)} = §4 и bfrtr(t)} = /(S)
Z(s)
Z{s)
устойчивого периодического решения и переходного решения. Единственная
потенциальная трудность в нахождении этих решений кроется в нахождении обратного преобразования
Лапласа правой части уравнения A4). Большая часть остатка этой главы посвящена
нахождению преобразований Лапласа (изображений по Лапласу) и обратных преобразований.
В частности, мы ищем те методы, которые являются достаточно мощными, чтобы дать
возможность решить задачи, которые — в отличие от задач в примерах 1 и 2 — не могут быть
легко решены методами главы 3.
Дополнительные методы преобразования Лапласа
ример 4
Покажем, что
L{teat}
(s-a?
Решение Если /(f) = teat, то /@) = Ои f'(t) = eat + ateat. Следовательно,
теорема 1 дает
L{eat + ateat} = L{/'(*)} = sL{f(t)} = sL{teat}.
Из линейности преобразования следует, что
L{eat} + aL{teat} = sL{teat}.
Следовательно,
1
L{*-} = L{gat>
s — a (s — aJ'
A5)
потому что L{eat} = 1/E — a).
Найдем L{t sin kt}.
7.2. Применение преобразования Лапласа к задачам Коши ... 633
Решение Пусть f(t) = t sin kt. Тогда /@) — 0 и
f'(t) = sin kt + kt cos kt.
Производная содержит новую функцию t cos kt, так что мы обращаем
внимание, что /'@) = 0 и дифференцируем снова. Результат:
,/"(£) = 2к cm kt-h?t sin kt.
Но L{f"(t)} = s2L{/(£)} по формуле E) для преобразрвания второй
производной и L{cos kt} = s/(s2 -f Jr)', так что мы имеем
2 -fc2L{tsinfo} = s2L{*sinta}.
Наконец, мы решаем это уравнение относительно
2ks
L{t sin kt} = (g24,fc2J- 06)
Это значительно проще, чем вычислять интеграл
РОО
L{tsinfct} = te~3t sin ktdt. Ш
Jo
Примеры 4 и 5 эксплуатируют тот факт, что если /@) = 0, то дифференцирование /
соответствует умножению результата ее преобразования на s. Разумно ожидать, что
обратная операция интегрирования (антидифференцирование) соответствует делению результата
преобразования на s. ^^кШШЩ^йл^
Теорема 2
Преобразования интегралов
Пусть f(t) — кусочно непрерывная функция для t ^ 0, которая удовлетворяет условию
экспоненциального порядка \f(t)\ ^ МесЬ для t ^ Т. Тогда
h{V{T)dT) = \4m = Eir A7)
для s > с. Эквивалентно,
Доказательство. Поскольку / кусочно непрерывна, согласно фундаментальной
теореме анализа (дифференциального и интегрального исчисления) функция
а(*)=Г/(т)
Jo
dr
634 Глава 7. Методы преобразования Лапласа
непрерывна и g'(t) = f(t) там, где / непрерывна; таким образом, д непрерывна и кусочно
гладка при t ^ 0. Кроме того,
Г* Г* М + М +
\g(t)\ й \f(r)\dr йМ\ ecrdr = — (ес< - 1) < — ес\
Jo Jo с с
так что g(t) имеет экспоненциальный порядок при t —> +оо. Следовательно, мы можем
применить теорему 1 к д; это дает
L{f(t)} = L{g'(t)} = sL{9(t)}-g@).
Теперь ^@) = 0, так что деление на s приводит к
что и завершает доказательство.
Пример 6
Найдем обратное преобразование Лапласа (изображение по Лапласу)
1
ОД =
s2(s — a)'
Решение В действительности равенство A8) означает, что мы можем удалить
множитель s из знаменателя, найти оригинал функции полученного более
простого выражения й, наконец, проинтегрировать его от 0 до t (чтобы
"исправить" отсутствие множителя s). Таким образом,
[s(s -a) J J0 [s-a) J0 a
Мы теперь повторно применяем этот метод и получаем
При нахождении оригинала функции, представляющей собой дробь
вида P(s)/[snQ(s)]9 этот метод часто удобнее, чем метод разложения на
элементарные дроби. ■
Доказательство теоремы 1. Мы завершаем этот раздел доказательством теоремы 1
в общем случае, в котором /' является просто кусочно непрерывной. Мы должны доказать,
что предел
Г6
lim e-stf(t)dt
Ь—юо
\ e-atf'(t)<
Jo
7.2. Применение преобразования Лапласа к задачам Коши ... 635
существует щ кроме того, должны найти его значение. При фиксированном Ь обозначим
через ti,*2» • • -Лк-i внутренние точки интервала [0,6], в которых /'разрывна. Пусть tp = О
ntk = b. Тогда мы можем интегрировать по частям на каждом интервале (£n-i ? tn), где /'
непрерывна. В результате получим равенство
[ е-,'/'(*)Л = ^Г e-st/'(*)* =
JO n=lJt«-i
n=i vL Jtn-1 J*«-i /
= -/@) - £ e~8tnMtn) + e-sbf(b) + 8 f e-st/(i) A, A9)
^1 Jo
где
J/(*n) = /(*»+) ~ /(*»-)
B0)
является скачком функции f(t) в точке t = tn.Ho поскольку / непрерывна, каждый скачок
равен нулю: jf(tn) = 0 для всех п. Кроме того, если Ь > с, то e~sbf(b) —» 0 при b -4 +00,
Поэтому, переходя к пределу в A9) при Ъ —» +оо, мы получаем искомый результат:
L{/'(t)} = eL{/(*)}-/@). A
Обобщение теоремы
1
Предположим, что оригинал f(t) сам по себе только кусочно непрерывен (а не непрерывен),
причем его точки разрыва (в которых он терпит конечные скачки) обозначим через t\, £2,
£3, Предполагая, что L{/'(£)} существует, в A9) мы переходим к пределу при b —> +00
и получаем
L{/'(t)} = sF(s) - /@) - £ e-^jf(tn).
B1)
71 = 1
Пример 7
Пусть f(t) = 1 + [£] будет единичной ступенчатой функцией; ее график
. показан на рис. 7.2.8. Тогда /@) = 1, /'(£) = 0 и j/(n) = 1 для каждого
целого числа п — 1,2,3, Следовательно, из равенства B1) имеем
0
sFE)_i_£(
п=1
так что преобразование Лапласа (изображение по Лапласу) функции / (t)
имеет вид
1
1 ^
п=0
s(l-e-s)"
636 ГлаваЮШежщш преобразования Лапласа
6
. 5
4
3
2
г
/со
- ф,«.
— Ф*"-»0
1 1
1 2
j§««. ;■■■■ .,
ф^г,
—Qi
1 1 1 1
3 4 5 6 t
Рис. 7.2.8. График
единичной ступенчатой
функции из примера 7
На последнем шаге мы использовали формулу суммы бесконечной
геометрической прогрессии (геометрического ряда)
71=0
1-х'
при ж = е s < 1.
2^^3§а1Ш1
В задачах 1-16 с помощью преобразования Лапласа (гп. е. заменой оригиналов их изображениями
по Лапласу) решите данные задачи Коши (задачи с начальными условиями).
1.
3.
5.
7.
9.
11.
12.
13.
14.
15.
16.
х"
х"
х'
х'[
хп
х'
х'
х'
х"
х"
х'
2. х" + 9х = 0; ж@) = 3, ж'@) = 4
4. х" + 8х' + 15ж = 0; ж@) = 2, ж'@) = -3
6. ж" + 4ж = cost; х@) = 0 = ж'@)
8. ж" 4- 9ж = 1; х@) = 0 = ж'@)
10. ж" + За/ + 2х = t; х@) = 0, х'@) = 2
7 + 4ж = 0; ж@) = 5, ж'@) = 0
' - х' - 2х = 0; ж@) = 0, ж'@) = 2
7 + х = sin 2£; ж@) = 0 = ж'(°)
7 + х = cos3t; ж@) = 1, ж'@) = 0
7 + Ах' + Зж = 1; х@) = 0 = ж'@)
= 2ж + у, у' = 6ж 4- Зу; х@) = 1, г/@) =? -2
= ж + 2г/, у' = х + е-*; я?@) = г/@) = 0
+ 2г/' + ж = 0, х' - у' + у = 0; ж@) = 0, у@) = 1
7 + 2х + 4г/ = 0, у" + х + 2у = 0; ж@) = г/@) = 0, ж'@) = у'@) = -1
7 + х' + г/' + 2ж - у = 0, у" 4- х' 4- г/' 4- 4ж - 2г/ = 0; ж@) = г/@) = 1, х'@) = у'@) = 0
x + z,y' = x + y,z' = -2x - г; ж@) = 1, у@) = 0, г@) = 0
5 задачах 17-24 с помощью теоремы 2 найдите обратные преобразования Лапласа данных
функций.
1 _ „, х 3
17. F(e) =
19. F(«) =
21. F(e) =
5E - 3)
1
s(s2 + 4)
1
s2(s2 + 1)
18. F(s) =
20. F(s) =
22. F(s) =
s(s + 5)
2s+ 1
s(s2 + 9)
1
s(s2 - 9)
7.2. Применение преобразования Лапласа к задачам Коши ... 637
»• F(s) = * t. 24. F(s) *
s2(s2-l) # v J s(s + l)(s + 2)
25. Примените теорему 1 и найдите L{sin kt) с помощью формулы для L{cos kt).
26. Примените теорему 1 и найдите L{cosh kt) с помощью формулы для L{sinh kt).
27. (а) Примените теорему 1 и покажите, что
L{tneat) = -IL-L^-V*}.
s — о
(b) Выведите, что L{tneat} = n!/(s - o)n+1 для n = 1, 2, 3, ....
5 задачах 28-30 примените теорему 1, как в примере 5, и получите преобразования Лапласа
(изображения по Лапласу).
ч2 - k2 Iks
28. L{t cos kt} = т4—йчо 29- L0 sinh **} =
30. L{£ cosh Art} :
(s2 + fc2J l J (s2 - fc2J
52 + fc2
(s2 - fc2J
31. Примените результаты, полученные в примере 5 и задаче 28, и покажите, что
L_1 {(82+W} = 2^(8infct - Ыс0вЫ)-
В задачах 32-37 с помощью обобщения теоремы 1, выраженного равенством B1), найдите
преобразования Лапласа (изображения по Лапласу).
32. L{u(t - а)) = s_1e~as для а > 0.
33. Цусть f(t) = 1 на интервале [а, Ь] (где 0 < о < Ь) и /(£) = 0 во всех других точках. Тогда
Ч/(*)} =
34. Пусть /(£) = (—i)tt*b — функция прямоугольного колебания (меандра), график которой показан
на рис. 7.2.9. Тогда
L{/(t)} = itanh|.
(Указание. Используйте бесконечную геометрическую прогрессию.)
т
J I I I I L
1 2 3 4 5 6 '
Рис. 7.2.9. График функции
прямоугольного колебания (меандра)
из задачи 34
35. Пусть f(t) — единичная релейная функция, график которой показан на рис. 7.2.10. Тогда
1
L*w>-;(i+^)-
638 Глава 7. Методы преобразования Лапласа
1/@
1 2 3 4 5 6 '
Рис. 7.2.10. График релейной
функции из задачи 35
36. Пусть g(t) — треугольная волновая функция, график которой показан на рис. 7.2.11. Тогда
L{p(t)}=itanh|.
Рис. 7.2.11. График треугольной
волновой функции из задачи 36
37. Пусть f(t) — пилообразная функция, график которой показан на рис. 7.2.12. Тогда
1 е~3
■Ч/(*)} = ^
s2 зA-е-*У
{Указание. Обратите внимание, что f'(t) = 1 там, где производная определена.)
fit)
У/У////
12 3 4 5 6
Рис. 7.2.12. График
пилообразной функции из задачи 37
7.2. Приложение. Преобразования задач Коши
(задач с начальными условиями)
Типичная система компьютерной алгебры знает теорему 1 и ее следствие и, следовательно,
может преобразовывать не только функции (как в проекте раздела 7.1), но и полностью задачи
Коши (задачи с начальными условиями). Здесь мы иллюстрируем эту методику с помощью
системы Mathematica, а в приложении к разделу 7.3 — с помощью Maple. Рассмотрим задачу
Коши (задачу с начальными условиями)
х" + 4х = sin 3£, х@) = ж;@) = 0
из примера 2. Сначала мы определяем дифференциальное уравнение с его начальными
условиями, а затем загружаем пакет преобразования Лапласа (для нахождения изображений
по Лапласу).
7Д Сдвиг и здемздаарнью дроби 639
de = xfl[t] + 4*x[t] == Sin[3*t]
inits- = {x[0] -> 0f x'[0] -> 0}
Needs["Calculus 4LaplaceTransformN"]
Преобразование Лапласа (изображение ло Лапласу) дифференциального уравнения
получается так:
DE = LaplaceTransform[;de, t> s ]
Результат этой команды, который мы не приводим здесь явно, — линейное (алгебраическое)
уравнение относительно пока еще неизвестного выражения Lapl aceTr an s f orm [ x [ t ] ,
t, s ]. Мы продолжаем решать задачу и пытаемся найти преобразование X(s) этой
неизвестной функции x{i) и подставляем начальные условия.
X = Solve[DE, LaplaceTransform[x[t],t,s]]
X = X // Last // Last,// Last
X = X /. inits
3
(s2+4)(s2 + 9)
Наконец, нам остается только вычислить оригинал функции, чтобы найти x(t).
х = InverseLaplaceTransform[X,s,t] // Expand
^sinBt)~sinCt)
Конечно, мы могли (вероятно) получить этот результат немедленно с помощью DSolve,
но показанный здесь промежуточный вывод, сгенерированный по шагам, может быть
весьма поучителен. Вы можете попробовать сами решить задачи КЬши (задачи с начальными
условиями), данные в задачах 1-16.
73. Сдвиг и элементарные дроби
Как показано в примерах 1 и 2 из раздела 7.2, цоиск решения линейного дифференциального
уравнения с постоянными коэффициентами может часто сводиться к вопросу нахождения
обратного преобразования Лапласа рациональной функции вида
где степень многочлена P{s) меньше степени многочлена Q(s). Методика вычисления
Ь{Я(з)} базируется на том же самом методе разложения на элементарные дроби,
которым мы пользуемся в элементарном анализе (интегральном исчислении) при
интегрировании рациональных функций. Следующие два правила помогают разложить на
элементарные дроби R(s), если известно разложение знаменателя Q(s) на линейные множители,
которым соответствуют вещественные нули многочлена Q(s), и на неприводимые
квадратичные множители, которым соответствуют комплексные (но не являющиеся
вещественными!) нули многочлена Q(s).
S40 Глава 7. Методы преобразования Лапласа
Правило 1
Элементарные дроби, соответствующие линейным множителям
Часть разложения на простые дроби R(s), соответствующая линейному множителю s — а
кратности п, представляет собой сумму п элементарных дробей вида
s — a (s — аJ (з — а)п'
гдеAi,A29... иАп — константы
Правило 2
Элементарные дроби, соответствующие кёадратичным
множителям
Часть разложения на простые дроби, соответствующая неприводимому квадратичному
множителю (s — аJ + Ъ2 кратности п, представляет собой сумму п элементарных дробей
вида
Ais + Bi A2s + В2 Ans + Вп
+ Г/_ _\9 , L919 "Г ' " + г/ \о . гот™ 5 W/
(s-aJ + b2 [(s-aJ+b2]2 [(s-aJ + 62]"'
где Ль А2,..., Ап, В\, В2,... и Вп — константы. А
Вычисление L~1{R(s)} состоит из двух шагов. Сначала мы должны найти разложение на
простые дроби R(s), а затем мы должны найти обратное преобразование Лапласа
(изображение по Лапласу) каждой из полученных элементарных дробей типов, которые появляются
в B) и C). Последний шаг базируется на следующем элементарном свойстве преобразований
Лапласа (изображений по Лапласу).
Теорема 1
Сдвиг по оси s
Если F(s) = L{f(t)} существует Для s > с, то L{eatf(t)} существует для s > а + с и
>► L{eatf(t)} = F(s-a). D)
Эквивалентно,
> L-1{F(s-a)} = eatf(t). E)
Таким образом, сдвиг s —> s — а в преобразовании соответствует умножению оригинала от
tnaeat.
Доказательство. Если мы просто заменим s на s — а в определении F(s) = L{f(t)}9
мы получим
F{s -а)=\ e-(s~a»f{t) dt = e~st [eatf(t)] dt = L{eatf(t)}.
Jo Jo
Это и есть равенство D) и ясно, что равенство E) ему эквивалентно. А
7.3. Сдвиг и элементарные дроби 641
Если мы применим теорему о сдвиге к формулам для преобразований Лапласа
(изображений по Лапласу) уже знакомых нам функций tn9 cos kt и sin Ы9 умножив каждую из этих
функций на eat, и заменим s на s — а в преобразованиях, мы получим следующие добавления
к таблице на рис. 7.1.2.
д*>
eat cos kt
eat sin kt
ВД
П!
s — a
(s - aJ + k2
к
(s - aJ + k2
(s > a)
(s > a)
(s > a)
F)
G)
(8)
Пример 1
Рассмотрим систему, состоящую из тела заданной массы, закрепленного
на пружине, причем пусть т = |,& = 17ис = 3в единицах системы
МКС (система метр-килограмм-секунда) (рис. 7.3.1). Как обычно, пусть
x(t) обозначет смещение материальной точки заданной массы т от ее
положения равновесия. Предположим, что материальная точка заданной
массы приведена в движение при х@) = 3 и ^(О) = 1. Найдем x{t) для
полученных затухающих свободных колебаний.
Решение
Дифференциальное уравнение примет вид \х" + Ъх' + 17ж = 0, так что
мы должны решить задачу Коши (задачу с начальными условиями)
х" + бя/ + 34ж = 0; х@) = 3, ж'@) = 1.
Мы берем преобразование Лапласа (изображение по Лапласу) каждого
члена дифференциального уравнения. Поскольку [очевидно] L{0} = 0,
мы получаем уравнение
[s2X(s) - 3s - 1] + 6 [sX(s) - 3] + MX(s) = 0,
которое мы решаем относительно X(s), и получаем
35 + 19 л s + З л 5
X(s) =
= 3
+ 2-
s2 + 6s + 34 (s + 3J + 25 (s + 3J + 25'
Применяя формулы G) и (8) при а = — 3 и к = 5, мы находим, что
x(t) = е~3* C cos bt + 2 sin Ы).
На рис. 7.3.2 показан график этого быстро затухающего колебания. ■
Пример 2 иллюстрирует полезную методику нахождения коэффициентов элементарной
дроби в случае простых линейных множителей.
642 Глава 7. Методы преобразования Лапласа
*=17
с = 3
I х®
Рис. 7.3.1. Система,
состоящая из тела заданной
массы, закрепленного на пружине,
с демпфером из примера 1
Рис. 7.3.2. Функция, дающая
положение x(t) из примера 1
Пример 2
Найдем обратное преобразование Лапласа (изображение по Лапласу)
функции
Решение Обратите внимание, что знаменатель R(s) раскладывается на множители
так: Q(s) = s(s + 2)(s — 4). Следовательно,
s2 +1 А В С
s3-2s2-8s~ s + s + 2 + s - 4'
Умножение каждого члена этого уравнения на Q(s) приводит к
s2 + 1 = A(s + 2)(« - 4) + Bs(s - 4) + Cs(s + 2).
Когда в это уравнение мы последовательно подставляем три нуля s = О,
s = — 2 и s = 4 знаменателя Q(s), мы получаем в результате
-8А = 1, 12В = 5 и 24С = 17.
Таким образом, А = —g, В = ^ и С = ||, так что
s2 + l
s3 _ 2s2 _ 8s
-± +
_5_
12
+
17
24
s + 2 s~4'
и поэтому
\s3-2s2-8s/ 8 12 24
,4*
Пример З иллюстрирует методику дифференцирования, которая позволяет найти
коэффициенты элементарной дроби в случае кратных линейных множителей.
Пример 3
Решим задачу Коши (задачу с начальными условиями)
у" + 4у' + Ay = t2; j/@) = у'@) = 0.
7,3. Сдвиг и элементарные дроби 643
Решение Преобразованное уравнение имеет вид
s2Y(s) + AsY(s) + 4Y(a) = -|-
Таким образом,
2 А В_.£ D Е
{S) ~ s*(s + 2J ~ s3 + s2 + a + (а.+ 2J + а + 2' ( }
Чтобы найти А, В и С, мы умножаем обе части на s3 и получаем
2 = А + Ва + C*s2 + s^Fis), A0)
(s + 2)
где F(s) = D(s 4- 2)~2 4- jE7(s 4- 2)_1 — сумма этих двух элементарных
дробей, соответствующих (s 4- 2J. Подставляя s = ОвуравнениеA0),
получаем А = |. Чтобы найти В и С, мы дважды дифференцируем
уравнение A0) и получаем
—^з = В + 2С* + 3*2^E) + *3^'(*) A1)
-^f^ = 2C + 6sF(s) + 6s2F'(s) + s*F"(s). A2)
Теперь подстановка 5 = 0 в уравнение A1) дает В = — \9 а подстановка
5 = 0 в уравнение A2) дает С = |.
Чтобы найти D и Е, мы умножаем каждую часть уравнения (9) на
(s 4- 2J и получаем
4 - U + #(s + 2) + (а + 2JG(s), A3)
где G(s) з= As-3 4- JEte-2 4- Cs-1, и затем дифференцируем, в результате
чего получается
-4 = Е + 2(* 4- 2)G(a) + (а + 2JG\s). A4)
Подстановка s = —2 в уравнения A3) и A4) теперь дает D = —^иЕ =
= — §. Таким образом,
113 1 3
т=£-£ + *-тг*
s3 в2 в (s + 2J s + 2'
так что решение данной задачи Коши (задачи с начальными условиями)
имеетвид • « ^:;^'-:;
644 Глава 7. Методы преобразования Лапласа
Примеры 4, 5 и 6 иллюстрируют методы обращения с квадратичными множителями
в разложениях на простые дроби.
Пример 4
Рассмотрим систему, состоящую из материальной точки заданной массы,
закрепленной на пружине, с поршнем как в примере 1, но с начальными
условиями ж@) = х'@) = 0, причем на этот раз к системе приложена
внешняя сила F(t) — 15 sin 2t. Найдем полученное движение в
переходном режиме и установившееся периодическое движение материальной
точки заданной массы.
Решение Задача Коши (задача с начальными условиями), которую мы должны
решить, принимает вид
х" + 6х' + 34х = 30 sin 2t; ж@) = х'@) = 0.
Преобразованное уравнение имеет вид
s2X(s) + 6sX(s) + 34X(s) = -2^7-
Следовательно,
( . 60 As + B Cs + D
(S)~ (s2+4)[(s + 3J + 25] ~ s2 + 4 +(s + 3J + 25*
Умножив обе части на знаменатель дроби, мы получим
60 = (As + B)[(s + ЗJ + 25] + (Cs + D)(s2 + 4). A5)
Чтобы найти А и В, мы подставляем нуль s = 2г квадратичного
множителя s2 + 4 в уравнение A5); в результате имеем
60 = BгА + В)[Bг + ЗJ + 25],
что мы упрощаем и получаем
60 = (-24А + SOB) + F0A + 12B)i.
Теперь мы приравниваем вещественные и мнимые части в каждой части
этого уравнения и получаем два линейных уравнения
-24А + 30В = 60 и 60А+12В = 0,
которые легко решаются относительно А и В, и мы получаем А = — ^
лл R — 50
Чтобы найти С и D9 мы подставляем нуль s = — 3 + 5г квадратичного
множителя (s + ЗJ + 25 в уравнение A5) и получаем
60 = [С(-3 + К) + £>][(-3 + 5гJ + 4],
7.3. Сдвиг и элементарные дроби 645
что мы упрощаем и получаем
60 = A86С - 12D) + (ЗОС - 30£>)г.
Снова приравниваем вещественные части и мнимые части; що приводит
к двум линейным уравнениям
186С*- UD = 60 и ЗОС - 30Z> = 0,
и мы легко находим, что их решение будет С = D = Щ.
Подставляя полученные значения коэффициентов Л, Б, С и D9
находим разложение X (s) на элементарные дроби:
-105 + 50
уг«Л Х f-1QjH
+
10а + Ю N
(8 + 3J + 25,
29 V
105 + 25-2 t 10(g + 3)-4»5>
(s + 3J + 25 ,
s2+4
+
После вычисления обратного преобразования Лапласа мы получаем
функцию, дающую положение
x(t) = ^(-2cos2£ + 5sin2£) + ^e~3iEcos5£-2sin5£).
Слагаемые с круговой частотой 2 составляют установившееся
периодическое вынужденное колебание материальной точки заданной массы, тогда
какзатухающие по экспоненциальному закону слагаемые круговой
частоты 5 составляют ее переходное движение, которое исчезает очень быстро
(рис. 7.3.3). Обратите внимание, что переходное движение отлично от
нуля даже при том, что оба начальных условия являются нулевыми. ■
- Периодический процесс
-0,5
Рис. 7.3.3. Периодическое
вынужденное колебание xsp(£),
затухающее переходное
движение Xtr(t) и решение x(i) =
= #sp(£) + #t«W B пРимеРе 4
646 Глава 7. Методы преобразования Лапласа
Резонанс и кратные квадратичные множители
Следующие два обратных изображения по Лапласу полезны при обращении элементарных
дробей, которые соответствуют случаю кратных квадратичных множителей:
L{(?T^}-Ste,n,tt' A6)
L~X |{s2 + fc2J} = 2к3^пЫ~ЫС08Ы>>' A7)
Они следуют из решения примера 5 и задачи 31 из раздела 7.2 соответственно. Из-за
присутствия в уравнениях A6) и A7) слагаемых t sin kt и t cos kt, кратный квадратичный множитель
обычно сигнализирует о явлении резонанса в недемпфированной механической или
электрической системе.
Пример 5
С помощью преобразования Лапласа (изображения по Лапласу) решим
задачу Коши (задачу с начальными условиями)
х" + w%x = F0 smut; х@) = 0 = а?'@),
которая определяет недемпфированные вынужденные колебания
материальной точки заданной массы на пружине.
Решение Преобразовав дифференциальное уравнение, мы получим уравнение
s2X{s) +wlX{a) = 2 , 2, такжеХ(в) =
s2+a;2' — w (S2+a;2)(e2+ci;g)'
Если a; t^ u;o, мы без труда находим
Х7 ^ - Foa; f * 1_Л
а из этого следует, что
XW = —о о — sina;o^ smut .
a;2 — Uq \uo ш J
Но если uj = a;o, мы имеем
'W~E2+a;2J'
так что уравнение A7) дает резонансное решение
F0
x{t) = —-^(sina^ — u>otcosujQt). A8)
2a;n _
7.3. Сдвиг и элементарные дроби 647
Замечание. Интегральная кривая, определенная уравнением A8), скачет вверх и вниз
(рис. 7.3.4) между огибающими х = ±C{t)9 которые получаются, если записать A8) в виде
x(t) = A(t) coso;ot -f B(t) sino>o£
и затем определить обычную "амплитуду'' С = VA2 + В2. В этом случае мы находим, что
cw-^yfw + i.
Эта методика позволяет находить огибающие резонансных решений; она иллюстрируется
в приложении к этому разделу. ■
Рис. 7.3.4.
Резонансное решение A8) при
jJq = | и Fq = 1
вместе с его огибающими
г = ±C(t).
Пример 6
Решим задачу Коши (задачу с начальными условиями)
у<4> + 2у" +у = 4te<; у@) = у'@) = у"@) = уC)@) = 0.
Решение Сначала мы замечаем, что
1
W(*)} = *2Y{8), L{yW(t)} = s*Y(s) и Lite'}
Следовательно, преобразованное уравнение имеет вид
(*-iJ
(s4 + 2s2 + l)Y(s)
(s-1J-
Таким образом, наша задача состоит в том, чтобы найти оригинал функции
4
Y(s)
(s-lJ(s2 + lJ
А В Cs + D Es + F
{s - lJ + s - 1 + (s2 + lJ + s2 + 1 '
A9)
648 Глава 7. Методы преобразования Лапласа
Умножив на (s — lJ(s2 4-1J (это знаменатель нашей дроби), получим
уравнение
A(s2 4-1J + B(s - l)(s2 + lJ 4- Cs(s - lJ
+ D(s - lJ 4- Es(s - lJ(s2 4-1) 4- F{s - lJ(s2 4-1) = 4. B0)
После подстановки s = 1 находим А = 1.
Равенство B0)—тождество, которое справедливо для всех значений s.
Чтобы найти значения остальных коэффициентов, мы последовательно
подставляем значения s = 0, s = -1, s = 2, s = -2 и s = 3 в
уравнение B0). Это приводит к системе
-В + D 4- F= 3,
-SB- AC + 4D- 8Е+ 8F= 0,
25Б+ 2С4- #4- Ю#+ 5F = -21, B1)
-75В - 18С + 9£> - 90Е + 45F = -21,
200Б 4- 12С 4- 4£> 4- 120Я 4- 40F = -96
пяти линейных уравнений относительно В9 С, D9 E и F. С помощью
программируемого калькулятора решаем линейную систему и находим
B = -2,C = 2,D = 0,E = 2hF=1.
Теперь подставляем в уравнение A8) найденные коэффициенты и
таким образом получаем
_ __J: 2_ 2s 2s 4-1
(S) " (s - lJ " 7^1 + (s2 + lJ + s2 4-1 *
Вспоминая равенство A6), свойство сдвига и знакомые преобразования
функций cos t и sin t, мы видим, наконец, что решение данной задачи
Коши (задачи с начальными условиями) имеет вид
y{t) = (t - 2)е* + (t + 1) sint + 2cost. Ш
7.3. Задачи
В задачах 1-4 примените теорему о сдвиге и найдите преобразования Лйпласа (изображения по
Лапласу) заданных функций.
1. /(t) = tV* 2. /(*) = t3/2et
3. f(t) = et sin Зтг* 4. f(t) = e~t/2 cos 2 (t - £тг)
5 задачах 5-10 примените теорему о сдвиге и найдите обратные изображения по Лапласу
заданных функций.
*•*■(*)= о^-г 6.F(s)= s_1
2s - 4 ' w (s +1K
7- Ж-ЗТ7ТТ7 «•*■<-> = ' + 2
s2 4-4s 4-4 ,v y s2 + 4s + 5
7.3. Сдвиг и элементарные дроби 649
В задачах 11-22 с помощью элементарных дробей найдите обратные изображения по Лапласу
заданных функций.
s2 + 7s + 10 v ' s3 - s2 - 2s
4
16 w (s - 4)
s4 + 5s2 + 4 * w s4 - 8s2 + 16
21. *M = ^fot?o4a 22. F(s) = ^ " ^
(s2 + 2s + 2J # w Ds2 - 4s + 5J
5 задачах 23-26 с помощью разложения на множители
s4 + 4а4 = (s2 - 2as + 2a2)(s2 + 2as + 2a2)
получите указанные обратные изображения по Лапласу.
23. L-1 < —. --г \ — cosh at cos at 24. L_1 < —; -—т > = —r- sinh at sin at
\ s4 + 4a4 J \ s4 + 4a4 J 2a2
25. L_1 < —; 7-7 > = —- (cosh at sin at + sinh at cos at)
\s4 + 4a4J 2av '
26. L_1 < — -—r > = —-г- (cosh at sin at — sinh at cos at)
\ s4 + 4a4 J 4a3 v '
5 задачах 27-38 с помощью преобразования Лапласа (изображения по Лапласу) решите указанные
задачи Коши (задачи с начальными условиями).
27. х" + 6х' + 25х = 0; х@) = 2, ж'@) = 3 28. х" - 6х' + 8х = 2; х@) = ж'@) = 0
29. х" - 4х = 3t; х@) = х'@) = 0 30. х" + 4ж' + 8х = е"*; х@) = ж^@) = 0
31. хC) + ж" - 6х' = 0; х@) = 0, х'@) = ж"@) = 1
32. хD) - х = 0; х@) = 1, ж'@) = ж"@) = хC)@) = 0
33. хD) + х = 0; х@) = х'@) = ж"@) = 0, хC)@) = 1
34. хD) + 13х" + Збх = 0; х@) = х"@) = 0, ж'@) = 2, хC)@) = -13
35. хD) + 8х" + 1бх = 0; х@) = ж'@) = х"@) = 0, хC)@) = 1
36. хD) + 2х" + х = e2t; х@) = х'@) = х"@) = хC)@) = 0
37. х" + 4х' + 13а) = te_t; х@) = 0, я?'@) = 2
38. ж" + 6ж' + 18х = cos 2t; x@) = 1, х'@) = -1
Задачи 39 и 40 иллюстрируют два типа резонанса в системе, состоящей из материальной точки
.заданной массы, закрепленной на пружине, с демпфером при заданной внешней силе f(t) и
начальных условиях х@) = х'@) = 0.
650 Глава 7. Методы преобразования Лапласа
39. Предположим, что т = 1, к = 9, с = 0 и f(t) = 6cos3£. Зная оригинал функции, данный
в равенстве A6), получите решение x{t) = tsin3t. Создайте рисунок, который иллюстрирует
резонанс, который происходит в системе.
40. Предположим, что т = 1, к = 9,04, с = 0,4 и f(t) = 6e~t/5 cos 3£. Найдите решение
- x(t) ~teTt/5sm3t. ' '
Покажите, что максимальное значение амплитудной функции A(t) = £е~*/5 равно АE) = 5/е.
Таким образом, как показано на рис. 7.3.5, в течение первых 5 секунд амплитуда колебаний
материальной точки заданной массы увеличивается и лишь потом она будет заглушена при
t —► Ч-оо.
Рис. 7.3.5. График затухающего
колебания в задаче 40
7.3. Приложение. Исследование явлений затухания
и резонанса
Здесь мы опишем применение системы Maple для исследования поведения системы,
состоящей из материальной точки заданной массы, закрепленной на пружине, с поршнем
тх" + ex' + kx = F(t), х@) = ж'@) =0 A)
для значений параметров
m := 25; с := 10; к := 226;
в ответ на разнообразные возможные внешние силы.
1. F(t) = 0.
Это случай свободных затухающих колебаний, подобных показанным на рис. 3.4.12.
2. F(t) = 901 cos 3*.
С этой периодической внешней силой должно получиться устойчивое периодическое
колебание с затухающим по экспоненциальному закону переходным движением (как показано
на рис. 3.6.13).
3. F(t) = 900e~'/5cos3*.
Теперь периодическая внешняя сила затухает по экспоненциальному закону и
преобразование X(s) содержит кратный квадратичный множетель, который сигнализирует о наличии
7.3. Сдвиг и элементарные дроби 651
резонансного явления. Ответ x(t) — постоянное число, умноженное на колебание, которое
показано на рис. 7.3.5.
4. F(t) = 900te-*/5cos3t.
Мы вставили множитель t9 чтобы сделать эту задачу немного более интересной. Решение
в этом случае приведено ниже.
5. F@ = 162Ar*/6cos3t.
В этом случае преобразование X(s) сддержит пятую степень квадратичного множителя
и найти оригинал функции вручную было бы невероятно утомительно.
Чтобы проиллюстрировать применение пакета Maple, мы сначала задаем
дифференциальное уравнение, соответствующее случаю 4.
F := 900*t*exp(-t/5)*cos C*t);
de := m*diff(x(t),t$2) + c*diff(x(t),t) + k*x(t) = F;
Затем мы применяем преобразование Лапласа (изображение по Лапласу) и подставляем
начальные условия.
with(inttrans):
DE := laplace(de, t, s):
X(s) := solve(DE, laplace(x(t), t, s)):
X(s) := simplify(subs(x@)=0, D(x)@)=0, X(s)));
Теперь с помощью команды factor (denom (X (s) ) ) разложим знаменатель на
множители и тем самым убедимся, что
22500B5s2 + 10s - 224)
{S)~~ B5s2 + 10s + 226K '
Возведенный в куб квадратичный множитель было трудно обработать вручную, но команда
x(t) := invlaplace(X(s), s, t);
выполняется очень быстро и дает
x(t) = e~t/5 (tcosSt + Ct2 - |) sin3£).
Амплитудная функция этих затухающих колебаний определена равенством
C(t) := exp(-t/5)*sqrt(tA2 + C*tA2 - 1/3)А2);
и, наконец, команда
plot({x(t), C(t)f -C(t)}f t=0..40);
создает чертеж, показанный на рис. 7.3.6. Резонанс, получающийся из-за кратного
квадратичного множителя, проявляется во временном нарастании колебаний перед затуханием.
Для каждого из случаев 1-5 вы можете ввести соответствующую внешнюю силу и снова
выполнить указанные ранее команды. Чтобы увидеть преимущество использования
преобразований Лапласа (изображений по Лапласу), задайте дифференциальное уравнение de
в случае 5 и исследуйте результат выполнения команды
652
Глава 7. Методы преобразования Лапласа
40
20
-20
-40
- \|
1
I
III'
1
-НИ-
x = + C(t)
■x = -C(J)
Рис. 7.3.6. Резонансное
решение и его огибающие jb случае 4
dsolve({de, х@)=0, D(x)@)=0}, x(t));
Конечно, вместо используемых здесь вы можете подставить ваши собственные любимые
параметры системы, состоящей из материальной точки заданной массы, закрепленной на
пружине с поршнем. Но вычисления упростятся, если вы выберете т,сиктак, что
гаг2 + сг + к = (рг + аJ + б2, B)
где р, а и Ъ — целые числа. Один из способов состоит в том, чтобы сначала выбрать эти
последние целые числа, а затем использовать уравнение B), чтобы определить га, с и к.
7.4. Производные, интегралы и произведения
преобразований
Иногда заранее известно, что преобразование Лапласа (изображение по Лапласу)
первоначально неизвестного решения дифференциального уравнения является произведением
преобразований двух известных функций. Например, когда мы преобразуем задачу Коши
(задачу с начальными условиями)
х" + х = cost; х@) = х'@) = 0,
мы получаем
x{s) = i^rw = ^тт' ?+т= L{cos'}'L{sini}-
Это убедительно подсказывает, что должен быть способ объединить две функции sin t и cos t,
чтобы получить функцию х (t), чье преобразование равно произведению их преобразований.
Но очевидно, что x(t) — не просто произведение cos t и sin t, потому что
L{cost sin t) = L {| sin 2t}
Таким образом, L{cos£ sin t} ф L{cos£} • L{sint}.
Согласно теореме 1 из этого раздела функция
1
52+4 ^ (S2 + 1J'
М*)=* [ f(r)g(t-T)dr
Jo
A)
7.4. Производные, интегралы и произведения преобразований 653
имеет нужное свойство:
L{h(t)} = H(s) = F(s) • G(s). B)
Новая функция от t, определенная как интеграл в A), зависит только от / и д и называется
сверткой функций / и д. Она обозначается / * д, идея состоит в том, что она является новым
типом произведения / и д, подобранным так, что преобразование этого произведения равно
произведению преобразований / и д.
Определение. Свертка двух функций
Свертка / * д кусочно непрерывных функций / и д определена для t ^ О следующим
образом:
> (/*»)(*)= [ f(r)g(t-r)dr. C)
Jo
Мы также пишем f(t)*g(t)9 если это удобно. В терминах произведения-свертки теорема 1
из этого раздела может быть записана в виде равенства
> L{f*g} = L{f}-L{g}.
Если мы подставим u = t — rB интеграл в C), то получим
f(t) * g(t) = | f(r)g(t - т) dr = J* f{t - u)g(u){-du) =
= [ g(u)f(t-u)du = g(t)*f(t).
Jo
Таким образом, свертка коммутативна: f * д = д* f.
Пример 1
Свертка функций cos t и sin t равна
(cost) * (sin£) = cosrsin(£ — т) dr.
Jo
Мы применяем тригонометрическое тождество
cos A sin В = \ [sin( A + В) - sin( A - В)]
и получаем
(cost) * (sint) = | [sint — sinBr — t)] dr =
Jo
= | Tsint-Ь |cosBt~ t)\ ;
L Jr=o
654 Плава 7. Методы преобразования Лалласа
иными словами, fe Ьй
(cos£) * (sin£) = ^tsint. ^
А из примера 5 из раздела 7.2 мы знаем, что преобразование Лапласа
(изображение по Лапласу) функции ^tsint действительно равно
s/(s2 + lJ. '"' ' ■
Теорема 1 будет доказана в конце этого раздела.
Теорема 1
^ШШШШ^ШЩШ!
ШЙ9ШЙШШЯШ§ШШЯйШЯШЯЯШйШШ(ЯШЯй/Л,
Предположим, что функции f(t) и g(t) кусочно непрерывны при i ^ 0 и что их модули
\f(t)\ и \g(t)\ ограничены выражением Mect при t —► +оо. Тогда преобразование Лапласа
(изображение по Лапласу) свертки f(t) * g(t) существует для s > с и, кроме того,
>► L{f(t)*g(t)} = L{f(t)}-L{g(t)}, D)
причем
> L-1{F(s)-G(s)} = f(t)*g(t). E)
А
Таким образом, мы можем найти оригинал функции-произведения F(s) • G(s), если
сможем вычислить интеграл
> L-^^W ' ОД} = [ f(r)g(t - т) dr. E0
Jo
Пример 2 иллюстрирует, что свертка часто дает удобную альтернативу разложению на
элементарные дроби при нахождении оригиналов функций (обратных преобразований).
Пример 2
Полагая/(£) = sm2tug(t) = e* и воспользовавшись сверткой, получаем
равенство
rt
-' {(,-!)(„* +4)} = <8i°24» '"' = J/"'™^*
J(
t
е
о
е
—— (— sin 2т — 2 cos 2т)
5
t
так что
L{(,-i)(s2+4)}=rt4sin2f-Icos2<-
Дифференцирование преобразований
Согласно теореме 1 из раздела 7.2, если /@) = 0, то дифференцирование функции f(t)
соответствует умножению ее преобразования на s. Теорема 2, доказанная в конце этого
раздела, утверждает, что дифференцирование преобразования F(s) соответствует умножению
оригинала f{i) на —t.
7.4. Производные, интегралы и произведения преобразований
655
Теорема 2
Дифференцирование преобразований
Й1шШ1й&д%^^^
Если /(t) кусочно непрерывна при t ^ 0 и \f(t) | ^ Mect при £ —> Н-оо, то
L{-t/(t)j = *"(*)
для s > с. Эквивалентно,
> f(t) = L-1{F(s)} = -±L-1{F'(s)}.
Повторное применение равенства F) дает
L{tnf(t)} = (-l)nFW(s)
для п = 1,2,3,—
Пример 3
Найдем L{t2 sin kt}.
Решение Уравнение (8) дает
!*"-.«)-(-l^ (^) -
-2ks
(s2 + fc2J
6ks2 - 2fc3
(s2 + A;2K '
F)
G)
(8)
▲
(9)
Равенство G), выражающее свойство дифференцирования, часто полезно при
вычислении оригинала функции, когда проще работать с производной преобразования, чем с самим
преобразованием.
Пример 4
Найдем L {arctg(l/s)}.
Решение Производная функции arctg(l/s) — простая рациональная функция, так
что мы применяем уравнение G):
-'Ы}~И=-*;}~Иш&}-
Поэтому
656 Глава 7. Методы преобразования Лапласа
С помощью равенства (8) можно преобразовать линейное дифференциальное уравнение,
коэффициенты которого являются многочленами, а не константами. В результате получится
дифференциальное уравнение относительно преобразования; приводит ли эта процедура
к успеху, зависит, конечно, от того, будет ли решить новое уравнение легче, чем старое.
Пример 5
Пусть x(t) будет решением уравнения Бесселя нулевого порядка:
tx" + х' + tx = О,
таким что х@) = 1 и ж'@) = 0. Это решение уравнения Бесселя обычно
обозначается через Jo(t). Поскольку
L{x'(t)} = sX(s) - 1 и L{x"(t)} = s2X(s) - s,
и поскольку х и х" умножаются на t9 то, применив формулу (8), получим
преобразованное уравнение
-^ [s*X(s) -»] + [sX(s) - 1] - ± [X(s)} = 0.
В результате дифференцирования и упрощения получится
дифференциальное уравнение
(s2 + l)X'(s) + sX(s) = 0.
Это уравнение с разделяющимися переменными:
X'(s) s_
X(s) " 52 + 1;
его общее решение имеет вид
Vs2 + 1
В задаче 39 мы выделяем значение параметра С = 1. Поскольку X(s) =
= L{ Jo(t)}, из этого следует, что
L{J0(t)} = -т^=. (Ю)
VV + 1
Интегрирование преобразований
Дифференцирование изображения F(s) соответствует умножению f(t) на t (вместе с
изменением знака). Поэтому естественно ожидать, что интегрирование изображения F(s) будет
соответствовать делению f(t) на t. Теорема 3, доказанная в конце этого раздела,
подтверждает это при условии, что полученное частное f(t)/t будет хорошо себя вести при t —► 0
справа; т. е. при условии, что предел
f(t)
lim —— существует и конечен. A1)
t-*o+ t
7.4. Производные, интегралы и произведения преобразований 657
Интегрирование преобразований
Теорема 3
Предположим, что f(t) кусочно непрерывна при t ^ 0 и /(t) удовлетворяет условию
|/(*)| й Mect при t -> +oo. Тогда
для s > с. Эквивалентно,
fit) = L-^Fis)} = tL-1 ||°°F(a) Аг} .
A2)
A3)
▲
Пример б
Найдем L{(sinh £)/£}.
Решение Сначала, воспользовавшись правилом Лопиталя, убедимся, что
выполняется условие A1):
.. smht _. е* — е * .. е* + е *
lim = lim — = lim
t->o t t->o 2t t-*o 2
Затем, полагая в равенстве A2) f(t) = sinh t, получим
= 1.
In
or — 1'
<Х+1
Поэтому
потому что In 1 = 0.
\ t J 2 5-1'
Свойство интегрирования, выраженное в равенстве A3), часто полезно при вычислении
оригинала функции, когда проще работать с неопределенным интегралом преобразования,
чем с самим преобразованием.
Пример 7
Найдем!/-1^/^2-!J}.
Решение Можно использовать разложение на элементарные дроби, но намного
проще применить формулу A3). Она дает
658 Глава 7. Методы преобразования Лапласа
и поэтому
t sinh t.
~1(*2-1J}
кДоказательства теорем
Доказательство теоремы 1. По теореме 2 из раздела 7.1,преобразования F(s) и G(s)
существуют при s > с. Определение преобразования Лапласа (изображения по Лапласу)
дает формула
роо рею
G(s) = е~зид{и) du = e"a^"r^g{t -r)dt (u = t- r\
и поэтому
pOQ
G(s)=esr e-stg(t-r)dt,
Jo
JO
потому что мы можем так определить f(t) и g(t)9 чтобы они были нулевыми при t < 0. Тогда
рОО рОО
F(s)G(s) = G(s) e-ST/(r) dr = e~ST f{r)G{s) dr =
Jo Jo
= Г e'ST/(r) (eST Г e~atg{t - r) dt\ dr =
=Г (Г e~stf{T)g{t -r) dt)dr-
Теперь из условий, налагаемых на / и д9 следует, что порядок интегрирования можно
изменить. (Доказательство этого требует обсуждения равномерной сходимости
несобственных интегралов и может быть найдено в главе 2 книги Черчилля (Churchill) Operational
Mathematics, посвященной операционным методам в математике C-е издание выпущено
в Нью-Йорке в 1972 году издательством McGraw-Hill). Поэтому
F(s)G(s) = £° Q°° e-stf(r)g(t - т) dr) dt =
= £° e~st Qo f(r)g(t - r) dr) dt =
рСЮ
= e-St[f(t)*9(t)}dt
Jo
и, следовательно,
F(8)G(e) = L{f(t)*g(t)}.
Мы заменяем верхний предел внутреннего интеграла на t, потому что g(t — т) = 0 всякий
раз, когда т > t. Это завершает доказательство теоремы 1. А
7.4. Производные, интегралы и произведения преобразований 659
Доказательство теоремы 2. Поскольку
рОО
F(s)=\ e~8tf{t)dt,
Jo
дифференцирование под знаком интеграла приводит к
рОО J рОО
= Jo £s[e~StfWdt = l e-st[-tf(t)]dt;
таким образом,
F'(s)=L{-tf(t)},
что совпадает с равенством F). Мы получаем равенство G), применяя LT1 и затем выполняя
деление на — t. Законность дифференцирования под знаком интеграла гарантируется
равномерной сходимостью полученного интеграла; это обсуждается в главе 2 книги Черчилля
(Churchill) Operational Mathematics, посвященной операционным методам в математике C-е
издание выпущено в Нью-Йорке в 1972 году издательством McGraw-Hill). A
Доказательство теоремы 3. По определению
F{a) = Г
Jo
оо
ff(t)dt
Так что интегрирование F(a) от s до +оо приводит к равенству
рОО рОО / рОО \
F(a)da=\ М e-atf(t)dt)da.
Согласно условию теоремы, можно изменить порядок интегрирования (снова см. книгу
Черчилля); отсюда следует, что
рОО рОО / рОО \
F(a) da =\ M e-<rt/(t) da) dt =
,-crt I oo
'—\ №dt =
-Г
Jo
Это подтвержает равенство A2), а равенство A3) следует после того, как сначала применим
L-1, а затем умножим на t. A
7.4. Задачи
В задачах 1-6 найдите свертку f(t) * g(t).
1. fit) = t, g(t) = 1 2. f(t) = *, g(t) = eat
s(s2
S2(s
s(s2
+ 4)
1
2 + fc2)
1
+ 4s + 5)
s
660 Глава 7. Методы преобразования Лапласа
3. f(t) = #(t) = sint 4. /(t) = t2, g{t) = cost
5. /(t) = g(t) = eat 6. /(t) = eat, <?(t) = ebt (а ф b)
В задачах 7-14 примените теорему о свертке и найдите обратные изобраэюения по Лапласу
заданных функций.
7- F<s)=*bj 8-F(s) = 1
'• П.) = (^ Ю. F(.) =
1LFW=E?T^ 12. F(s) =
U-F^=(s-3)U + 1) "FW =* + *»+4
5 задачах 15-22 примените теорему 2 или теорему 3 и найдите преобразование Лапласа
(изображение по Лапласу) функции f(t).
16. /(t) = t2cos2t
18. f(t) = te_t sin21
20. /(«) = i^p»
t _ -t
- t 22.f(t)=e-^-
В задачах 23-28 найдите оригиналы (обратные преобразования) заданных функций.
*.Р(.) = 1*Щ 14.F(.)=ln£±±
25- F^ = Ы (8+82)|Лз) 26- F(S) = ■"* 7Т2
27. F(s) = In f1 + ±) 28. F(s) = S
15.
17.
19.
21.
/(*)
/(*)
= t sin 3t
= te2t cos
sint
~ "T"
e3t-l
3t
(s2 + lK
5 задачах 29-34 преобразуйте данное дифференциальное уравнение и найдите нетривиальное
решение, такое что х@) = 0.
29. tx" + (t - 2)ж' + ж = 0 30. tx" + Ct - 1)ж' + Зх = 0
31. tx" - Dt + 1)ж' + 2Bt + 1)ж = 0 32. tx" + 2(t - l)x' -2x = 0
33. tx" - 2x' + tx = 0 34. tx" + Dt - 2)x' + A3t - 4)x = 0
35. Примените теорему о свертке и покажите, что
ь-,{5=Ы-£Г^,,"-А*А
(Указание. Подставьте u = \/t.)
5 задачах 36-38 примените теорему о свертке и найдите указанное решение x(t) данного
дифференциального уравнения с начальными условиями ж@) = х'@) — 0.
36. х" + Ах = /(t); x(t) = i [ f(t-r) sin 2r dr
2 Jo
7.5. Периодические и кусочно-непрерывные входные функции 661
37. х" + 2х' + х = f(t); x(t) = [ те~т fit - т) dr
Jo
i rt
38. ж" + 4r' + 13ж = /(*); a:(t) = - fit - т)е~2т sm3rdr
3 Jo
Оригинал функции и почленное обращение ряда
В главе 2 книги Черчилля Operational Mathematics, посвященной операционным методам в
математике C-е издание выпущено в Нью-Йорке в 1972 году издательством McGraw-Hill), доказана
следующая теорема. Предполоэюим, что f(t) непрерывна при t^.0, f(t) имеет экспоненциальный
порядок при t —» -boo и что
оо
71=0
где О й к < 1, и ряд сходится абсолютно для $ > с. Тогда
^ antn+k
71=0 V '
Примените этот результат в задачах 39-41.
39. В примере 5 показано, что
L<*<"> - V?TT = 7 A + ?)"""•
Воспользовавшись биномиальным рядом, разложите в ряд, а затем вычислите член за членом
обратное преобразование и получите
00 / -|\п.2п
n=0 v y
Наконец, обратите внимание, что из Jo@) = 1 следует, что С = 1.
40. Разложите функцию F(s) = s~1^2e~1/s в ряд по степеням s_1 и покажите, что
41. Покажите, что
lv^ J sfiTt
7.5. Периодические и кусочно-непрерывные
входные функции
Математические модели механических или электрических систем часто содержат
функции с разрывами, соответствующими внешним силам, которые внезапно включаются или
отключаются. Один такой простой пример релейной функции — единичная ступенчатая
функция (функция Хевисайда) со ступенькой в точке t = а; она определяется формулой
и\ и \ /°' если£<а, /1Л
ua(t) =u{t-a) = i A)
II, если£ ^ а,
а ее график приведен на рис. 7.5.1.
662
Глава 7. Методы преобразования Лапласа
В примере 8 из раздела 7.1 мы видели, что если а ^ 0, то
L{u(t - а)} =
B)
Поскольку Ь{и (t)} = 1 /s, из равенства B) следует, что умвджение прербразования функции
u{t) на e~as соответствует сдвигу t —► t — а по первоначальной независимой переменной.
Согласно теореме 1, этот факт, если он должным образом интерпретируется, является общим
свойством преобразования Лапласа.
Теорема 1
Сдвиг вдоль оси Г
Если L{f(t)} существует для 5 > с, то
L{u(t - a)f(t - а)} = e~a3F(s)
Ca)
L4{e-MF(e)} = ti(* - a)/(* - a)
для s> c + a.
Обратите внимание, что
u(t — a)f(t — a) =
0,
если t < a,
f(t — a), если£ ^ a.
Cb)
▲
D)
Таким образом, из теоремы 1 следует, что L~1{e~asF(s)} явлется функцией, график которой
для t ^ а получается сдвигом на а единиц вправо из графика /(£). Обратите внимание, что
часть графика f(t) слева от t = 0 отрезана и не сдвигается (рис. 7.5.2).
* = и«@
Рис. 7.5.1. График единичной
ступенчатой функции
(функции Хевисайда) со ступенькой
в точке t — а
Рис. 7.5.2. Сдвиг f(t) на а
единиц вправо
Доказательство теоремы 1. По определению L{/(£)} мы имеем
e-asF(s) = e~as e-STf(r) dr = е~^Т+^ /(т) dr.
Jo Jo
7.5. Периодические и кусочно-непрерывные входные функции 663
Подстановка t = т + а в этом случае дает
рею
e-asF(s) = e~stf(t - a) dt.
Ja
Из равенства D) мы видим, что это то же самое, что и
роо
e~asF(s) = e~3tu(t - a)f(t -a)dt = L{u(t - a)f(t - a)},
Jo
потому что u(t — a)f(t — a) = О для t < a. Это завершает доказательство теоремы 1. А
Пример 1
Для /(£) = \& по теореме 1
L_1{?"} = u(*"a^(*"aJ
(о,
если £ < а,
~(£ — аJ, если£ ^ а
(рис, 7.5.3).
Пример 2
Найдем L{g(t)}, если
$(*) =
[ 0, если t < 3,
t2, если^^З
(рис. 7.5.4).
Решение Чтобы применить теорему 1, мы должны сначала записать g(t) в форме
u{t—3)f(t—3). Функция / (t), из которой в результате сдвига на 3 единицы
вправо получается (для t ^ 3) функция #(£) = t2, равна f(t) = (£ + ЗJ,
потому что /(£ — 3) = t2. Но тогда
F(S) = L{<2 + 6*H-9} = | + | + J,
=±H,('X*-«r
20
15
10
5
д:
Л
/ \
x = t2S x = g(t)
^?С- Д,,.-,..-^Д 1
12 3 4
г
Рис. 7.5.3. График
оригинала функции из примера 1
Рис. 7.5.4. График функции
g(t) из примера 2
664 Глава 7. Методы преобразования Лапласа
так что теперь по теореме 1
L{g(t)} = L{u{t - 3)/(* - 3)} = e-3sF(s) = es (| + | + ?)
Пример 3
Найдем L{/(£)}, если
г/,ч |cos2t, если0<£<27г, , „ *. *.ч
f® = \n *>о (рис. 7.5.5).
1^0, если^^27г
Решение Сначала мы обращаем внимание, что
f(t) = [1 -u{t - 2тг)] cos 2t = cos 2t - u(t - 2тг) cos 2(t - 2тг)
из-за периодичности функции косинус. Следовательно, по теореме 1
аA - е™)
L{/(t)} = L{cos2*} - e-27rsL{cos2t} =
s2 + 4
Рис. 7.5.5. Функция f(t) из
примеров 3 и 4
Пример 4
Материальная точка заданной массы, которая весит 32 фунта (масса га =
= 1 слаг (единица массы в системе фунт-сила)), закреплена на свободном
конце длинной легкой пружины, которая растянута на 1 фут силой 4 фунта,
причем к =± 4 фунта/фут. Материальная точка заданной массы
первоначально находится в покое в ее положении равновесия. Начиная с момента
времени t = 0 (секунды), внешняя сила f(t) = cos2£ прикладывается
к материальной точке заданной массы, но в момент времени t = 2tv эта
сила отключается (резко отсоединяется), и материальная точка заданной
массы продолжает свое беспрепятственное движение. Найдем функцию,
дающую положение x(t) материальной точки заданной массы.
7.5. Периодические и кусочно-непрерывные входные функции 665
Решение Мы должны решить задачу Коши (задачу с начальными условиями)
х" + Ах = /(*); х@) = х'@) = О,
где f(t) — функция из примера 3. Преобразованное уравнение имеет вид
(s2 + 4)X(s) = F(s) = -
вA - е-2™)
s2 + 4
так что
Поскольку
Х(8)
(s2 + 4J
— е
-2жа
1 \E2+4J/ i
(82 +4J*
t sin 2£,
E2+4J
с учетом равенства A6) из раздела 7.3 из теоремы 1 следует, что
x(t) = \tsin2t - u(t - 2тг) • \(t - 2тг) sin2(t - 2тг) =
= \ [t - u(t - 2тг) • (t - 2тг)] sin 2t.
Если мы отдельно рассмотрим случаи t < 2п и t ^ 27г, мы найдем,
что функция, позволяющая вычислить положение, может быть записана
в форме
\t sin 2t, если t < 27г,
x(t)
sin 2£, если t > 27Г.
Как видно из графика х (t), приведенного на рис. 7.5.6, материальная точка
заданной массы колеблется с круговой частотой ш = 2 и с линейно
увеличивающейся амплитудой, пока сила не отключается в момент времени
t = 27Г. После этого материальная точка заданной массы продолжает
колебаться с той же самой частотой, но с постоянной амплитудой 7г/2.
Сила F(t) = cos2£ вызвала бы чистый резонанс, если бы продолжала
Kll
0
-Kll
•tr
у~Тк
У 1\
У[\ 7 1
У J \ I!
N \ / 11 1
ч\/ III
^ \ 1 \
Ч 1/ J
' ' Г1 "
х = к11 !
х = -ff/2
■ j
1к
Ак
вк
Рис. 7„5*6fr График функции
x(t) из примера 4
666 Глава 7. Методы преобразования Лапласа
действовать неопределенно долго, но мы видим, что ее действие
прекращается и явление резонанса исчезает немедленно в момент времени ее
отключения. ■
Если бы мы должны были решить пример 4 методами главы 3, мы должны решить
одну задачу для интервала 0 ^ t < 27Г, а затем решить новую задачу с другими начальными
условиями для интервала t ^ 2я-. В этой ситуации метод преобразования Лапласа отличается
тем преимуществом, что он не требует решения различных задач на различных интервалах.
Пример 5
Рассмотрим цепь RLC, состоящую из сопротивления, индуктивности
и емкости. Эта цепь показана на рис. 7.5.7, ее параметры R = 110 $7,
L = 1 генри, С = 0,001 фарады, причем она подключена к батарее
с Ео — 90 В. Первоначально в цепи никакого тока нет и заряд на
конденсаторе отсутствует. В момент времени t = 0 выключатель замыкают
и оставляют замкнутым в течение 1 секунды. В момент времени t = 1 его
размыкают и оставляют разомкнутым после этого. Найдите полученный
ток в цепи.
Выключатель
£о —
VW
R
Рис. 7.5.7.
Последовательная цепь RLC, состоящая из
сопротивления,
индуктивности и емкости из примера 5
Решение Как мы помним из раздела 3.7, основное уравнение последовательной
цепи имеет вид
у di п. 1 , ч
E)
мы используем буквы нижнего регистра для обозначения тока, заряда
и напряжения и резервируем прописные буквы для их преобразований
(образов). Для схемы с данными элементами уравнение E) принимает
вид
~ + 110г + 1000д = е(г),
at
F)
где e(i) = 90[1 — u(t — 1)] соответствует размыканию и замыканию-
выключателя.
7.5. Периодические и кусочно-непрерывные входные функции 667
В разделе 3.7 наша стратегия состояла в том, чтобы
продифференцировать обе части уравнения E), а затем применить соотношение
для того, чтобы получить уравнение второго порядка
, d2i _di 1 . r/ ч
Здесь мы не используем этот метод, потому что ef(t) = 0, крше момента
t = 1, тогда как скачок от e(t) = 90, когда t < 1 к e(t) = 0> когда £ > 1
казалось бы, требовал бы, чтобы е'A) = — оо. Таким образом, e'{t) имеет
бесконечный разрыв при t = 1. Это явление будет обсуждаться в
разделе 7.6. Пока kef мы просто обратим внимание, что это странная ситуация
и обойдем ее и не будем даже пытаться рассмотреть ее.
Чтобы избежать возможной проблемы при t = 1, мы замечаем, что
начальное значение q@) = 0 и уравнение G) после интегрирования дает
q(t) = [ <G
Jo
(г) dr. (8)
Мы подставляем равенство (8) в уравнение E) и получаем
Это — интегродифференциальное уравнение последовательной цепи
RLC, состоящей из сопротивления, индуктивности и емкости; оно
содержит и интеграл, и производную неизвестной функции i(t). Для такого
уравнения метод преобразования Лапласа работает великолепно.
В настоящем примере уравнение (9) принимает вид
dt
Поскольку
di Г*
— + ПО»+1000 i(r)dT = 90[l-u(t-l)}, A0)
Jo
l{J>*}-*?.
по теореме 2 из раздела 7.2 о преобразовании интегралов,
преобразованное уравнение имеет вид ч
8l(s) + 1107(e) + 1000^ = —A - e"s).
S 5
Мы решаем это уравнение относительно 7(s) и получаем
90A - e~s)
1(a)
52 + 1105+1000*
668 Глава 7. Методы преобразования Лапласа
Но
90 _ 1 ]__
s2 + 110s + 1000 ~ s + Ю ~ s + 100'
так что мы имеем
. . = _J 1__ _ _s /_1 1 \
^ 5 + 10 s + 100 e \s +10 S + 100/
Мытеперьприменяемтеорему1для/(<) = е_ш—е_100*;таким образом,
оригинал функции имеет вид
i(t) = е~ш - е-100* - u(t - 1) [е-10^1) - e-»>o(t-i)j
После того как мы отдельно рассмотрим случаи t < 1и£ ^ 1, мы найдем,
что ток в цепи можно определить по формуле
]e-10*-e-100t, если*<1, ,
1[) ~ \е~ш - е0^-1) - e-100t + е00^), если* ^ 1.
Выражение e~10t — е~1Ш в решении описывало бы ток в том случае, если
бы выключатель был замкнут все время (для всех t) и не был бы разомкнут
при£ ^ 1. ■
Преобразования периодических функций
Периодические вынуждающие функции в практических механических или электрических
системах часто более сложны, чем чистые синусы или косинусы. Функция /(£), отличная от
постоянной и определенная для t ^ 0, называется периодической, если существует число
р > 0, такое что
f(t+P) = f(t) си)
для всех £ ^ 0. Наименьшее положительное значение р (если такое существует), для
которого выполняется равенство A1), называют периодом функции /. Такая функция показана
на рис. 7.5.8. Теорема 2 упрощает вычисление преобразования Лапласа (изображения по
Лапласу) периодической функции.
Л А Л (
- \ / ~J у ; / ^ т w
U
" V": \l i м
I I
I I
fc=t
Рис. 7.5.8. График функции,
период которой равен р
7.5. Периодические и кусочно-непрерывные входные функции 669
Преобразования периодических функций
Теорема 2
Пусть f(t) — периодическая (с периодом р) кусочно непрерывная функция для £ ^ 0. Тогда
преобразование F(s) = L{f(t)} существует для s > 0 и дается формулой
™=^Ы/-'«>
dt. A2)
Доказательство. В соответствии с определением преобразования Лапласа
(изображения по Лапласу)
роо °° р(п+1)р
F(s)=\ e-stf(t)dt=J2\ e~stf(t)dt.
JO / n=0JnP
Подставляя t = г + прв интеграл номер п после знака суммы, получаем
J(n+l)p rp гр
e-8tf(t) dt = e-8^n^f(r + пр) dr = е~пр8 е~8Тf(r) dr,
пр JO JO
потому что f(r -f np) = /(г) из-за периодичности. Таким образом,
F(s) = £ (e"nps £ е—/(г) dr) =
= A + e-*s + e~2ps + • • •) Г e~STf(r) dr.
Jo
Следовательно,
F(s) = -— f e~srf(r)dr.
w 1 - e-P* Jo JK J
Мы используем бесконечную геометрическую прогрессию
1
1-х
= 1+х + х2+х3 +
при х = е ps < 1 (для 5 > 0), чтобы просуммировать ряд на заключительном этапе. Так мы
доказали равенство A2). А
Основное преимущество теоремы 2 состоит в том, что она дает возможность нам найти
преобразование Лапласа (изображение по Лапласу) периодической функции без
потребности явного вычисления несобственного интеграла.
Пример б
На рис. 7.5.9 показан график функции прямоугольного колебания
(меандра) f(t) = (—1I*/а1, причем период колебания равен р = 2а; [х\
обозначает самое большое целое число, не превышающее х. По
теореме 2 преобразование Лапласа (изображение по Лапласу) функции f(t)
670 Глава 7. Методы преобразования Лапласа
имеет вид
1 Г*а
-т^A>-'л+Г(-1)е""л) =
Поэтому
1
^ е—2as I
A - e~asJ
—e
5
-St
—e
5
-8t
2a>
1-е'
s(l-e-*as) 5(l + e~as)'
F(s)
1-e"
s(l + e~as)
eas/2 _ g—as/2
as
7 -77, /ox — — tanh л
s(eas/2 _|_ e-as/2) s 2
A3a)
A3b)
№
J L
J I I
2a 3a 4a 5a 6a
Рис. 7.5.9. График функции
прямоугольного колебания
(меандра) из примера 6
Рис. 7.5.10. График
треугольной волновой функции из
примера 7
Пример 7
Нарис. 7.5. Юпоказан график треугольной волновой функции #(£), период
которой равен р — 2а. Поскольку производная g'{t) является функцией
прямоугольного колебания (меандром) из примера 6, из формулы A3Ь)
и теоремы 2 из раздела 7.2 следует, что преобразование этой треугольной
волновой функции имеет вид
F(s) 1 as
G(s) = —— = -=■ tanh —.
A4)
Рассмотрим систему, состоящую из материальной точки заданной
массы, закрепленной на пружине, с поршнем при га = 1,с = 4ий = 20
7.5. Периодические и кусочно-непрерывные входные функции 671
в соответствующих единицах. Предположим, что первоначально
система находится в покое в положении равновесия х@) = ж'@) = 0) и что
на материальную точки заданной массы в начале в момент времени t = 0
действует внешняя сила / (t), график которой показан на рис .7.5.11:
прямоугольное колебание (меандр) с амплитудой 20, период которого равен
27г. Найдем функцию, позволяющую вычислить положение f(t) системы
в момент времени t.
20
-20
ДО
I
I
i !
i
п 2я Зя 4я 5я 6я
i i i i i i
i i i i i i
i i i i i i
i i i i
i
Рис. 7.5.11. График внешней
силовой функции из примера 8
Решение Задача Коши (задача с начальными условиями) в данном случае имеет
вид
х" + 4а?' + 20х = /(*); х@) = х'@) = 0.
Преобразованное уравнение имеет вид
s2X(s) + 4sX(s) + 20X(s) = F(s).
A5)
Из примера 6 при а = п следует, что преобразование функции f(t) имеет
вид
F(s) =
20 1-е-1™
s 1 + е-
20
= -A-^8)A
— 7TS , _ — 2ТГ8 _■— ЗТГЗ
+ е
— е
+••'■) =
так что
— A - 2e~ns + 2e
s v
-2ns
-2е
-3tts
+•••).
w-?+fD-T«
A6)
672 Глава 7. Методы преобразования Лапласа
Подставляя A6) в равенство A5), получаем
F(a)
Х(з)
s2 + 4s + 20
20 | 2УУ 1)" 20е~П™ A7)
s[(s + 2J + 16] ^ ' s[(s + 2J + 16]'
Применяя преобразование, указанное в равенстве (8) из раздела 7.3,
получаем
так что по теореме 2 из раздела 7.2, мы получаем
g(t) = L {-77 ^ —Д = f Ъе~2т sin 4т dr.
УК) \S[(s + 2J + 16]J Jo
Применяя табличную формулу для J eat sin bt dt, имеем
g(t) = 1 - e~2t (cos4* + \ sin4*) = 1 - h(t), A8)
где
h(t) = e~2t (cos 4* + \ sin 4*). A9)
Теперь мы применяем теорему 1, чтобы найти оригинал функции
в правой части уравнения A7). В результате получаем
оо
x(t) = g(t) + 2 ^(-l)nu(* - mr)g(t - птг), B0)
n=l
и мы обращаем внимание, что для любого фиксированного значения t
сумма в равенстве B0) конечна. Кроме того,
g{t - птг) = 1 - e(t-n7r) [cos4(* - птг) + ± sin4(* - птг)] =
= 1 - e2nne-2t (cos4t + \ sin4t).
Поэтому
$(* - птг) *±' - e2nnh(t). B1)
Следовательно, если 0 < t < тг, то
ж(*) = 1 - h(t).
Если тг < t < 2тг, то
а;(*) = [1 _ h(t)]- 2 [1 - е27Г/*@] = -1 + h(t) - 2h(t) [1 - е2*] .
7.5. Периодические и кусочно-непрерывные входные функции 673
ЕСЛИ 27Г < t < 37Г, ТО
x(t) = [1 - h(t)] - 2 [1 - e2nh(t)] + 2 [1 - e^h(t)] =
= 1 + Л(*) - 2Л(*) [1 - e27r + е47Г] .
Общее выражение для П7г < t < (п + 1Oг имеет вид
*(*) = h(t) + (-1)п - 2Л(*) [1 - е2п + • • • + (-1)пе2тг] =
B2)
= fc(t) + (-1)" - 2М0 \1^ ,
который мы получили с помощью знакомой формулы для суммы
конечной геометрической прогрессии. Перегруппировка слагаемых в
равенстве B2) с учетом равенства A9), наконец, приводит к
е2*-1
е21Г + 1(
\П„27Г
x(t) = ^ХТе_2' (cos4t + 3 sin4t) + (-1)" ~
~ 2 'jarТГ е~2('~та,Г) (C°S4* + * SiD 4t) B3)
дляп7Г < £ < (п + 1Oг. Первый член в уравнении B3) представляет собой
переходную составляющую решения (дифференциального уравнения)
xtT(t) « @,9963)e~2t (cos4t 4- \ sin 4*) «
« (l,1139)e-2tcosDt - 0,4636).
* ,-. ._., B4)
Последние два члена в уравнении B3) дают устойчивое периодическое
решение xsp. Чтобы исследовать его, мы пишем г = t — mr для t в
интервале П7Г < t < (п + 1)тг. Тогда
2е
2тг
rrep(i) = (-1)п 11 - -£—-е~2т (cos4r + \ sin4r)
: (-1)" [1 - B,2319)e-2TcosDr - 0,4636)] .
B5)
На рис. 7.5.12 показан график xsp (t). Его самая интересная особенность
состоит в появлении периодических затухающих колебаний с частотой
в четыре раза большей, чем частота приложенной силы f(t).B главе 9
(посвященной рядам Фурье) мы узнаем, почему периодическая внешняя
сила иногда вызывает колебания более высокой частоты, чем
приложенная частота. ■
674 Глава 7. Методы преобразования Лапласа
l -1-B.23)е-2<'-^
Рис. 7.5.12. График устойчивого периодического решения для
примера 8; обратите внимание на периодически затухающие
колебания с частотой в четыре раза большей, чем частота
приложенной силы
1.5. Задачи
В задачах 1-10 найдите обратное преобразование Лапласа (изображение по Лапласу) каэюдой
заданной функции f(t). Затем сделайте набросок графика /.
1. F(.) = =р-
3. F(s)
s + 2
7. F(s)
9. F(s) =
s2 + l
s(l + e-3s)
2. F(s) =*
4. F(s) =
6. F(s) =
8. F(s) =
10. F(s) =
e ' -e
-Зз
e2-2s
r-1
se
S2+7T2
32+7T2
2s(e-*8 - e~2*8)
S2 + 7Г2 W S2 + 4
В задачах 11-22 найдите преобразования Лапласа (изображения по Лапласу) данных функций.
11. f(t) = 2, если 0 < t < 3; f(t) = 0, если t ^ 3
12. f(t) = 1, если 1 ^ £ ^ 4; /(£) = 0, если t < 1 или если £ > 4
13. /(£) = sin £, если 0 й t й 2-к\ f(t) = 0, если t > 2п
14. f(t) = cosTrt, если 0 й t^ 2; /(£) = 0, если t > 2
15. f(t) = sin £, если 0 й t < 37г; /(£) = 0, если t > 37Г
16. /(£) = sin 2t, если 7г ^ £ f^ 27г; /(£) = 0, если t < 7г или если £ > 27г
17. /(£) = sin7rt, если 2utu3; f(t) = 0, если £ < 2 или если t > 3
7.5. Периодические м-кусочно^епрерывные входные функции 675
18. f(t) = cos \-xt, если 3 ^ t ^ 5; f(t) = 0, если t < 3 или если t > 5
19. /(*) = 0, если £ < 1; f(t) = t, если t ^ 1
20. /(*) = £, если £ ^ 1; f{t) = 1 если t > 1
21. /(*) = £, если * ^ 1; /(*) = 2 -1, если 1 ^ t^ 2; /(*) = 0, если t > 2
22. f(t) = £3, если 1 ^ £ £ 2; /(£) = 0, если £ < 1 или если t > 2
23. Примените теорему 2 при р = 1 и проверьте, что L{1} = 1/s.
24. Примените теорему 2 и проверьте, что L{cos kt} = s/(s2 + k2).
25. Примените теорему 2 и покажите, что преобразование Лапласа (изображение по Лапласу)
функции прямоугольного колебания (меандра), изображенного на рис. 7.5.13, имеет вид
1
L{/(t)} =
s(l + e-as)'
i i i i i i
_L
_L
_I„,
„J_
a 2a Ъа 4a 5a 6a
Рис. 7.5.13. График функции
прямоугольного колебания (меандра) из зада-
чи25
26. Примените теорему 2 и покажите, что преобразование Лапласа (изображение по Лапласу)
пилообразной функции f(t), показанной на рис. 7.5.14, имеет вид
^w - ^ -
as2 s(l-e-a3)'
lb
ДО
\ААЛЛЛЛ/
a la Ъа 4a 5a 6a
Рис. 7.5.14. График пилообразной
функции из задачи 26
27. Пусть g(t) — ступенчатая функция, изображенная на рис. 7.5.15. Покажите, что g(t) = (t/a) -
— f(t), где / — пилообразная функция, изображенная на рис. 7.5.14, и отсюда выведите, что
ьы*)} =
s{l-e-°s)'
676 Глава 7. Методы преобразования Лапласа
\8@
4Г
Зг
1г
2а
За
4а
Pfic. 7.5.15. График ступенчатой функции
из задачи 27
28. Предположим, что f(t) — периодическая функция, период которой равен 2а, причем f(t) = £,
если 0 ^ t < а, и /(£) = 0, если а ^ t < 2а. Найдите L{/(£)}.
29. Предположим, что /(£) — однополупериодное выпрямление sinkt, показанное на рис. 7.5.16.
Покажите, что
Ы№} к
(s2 + fc2)(l-e-W*)*
ДО
2п
к
Ък
к
Рис. 7.5.16. Однополупериодное
выпрямление sin kt
30. Пусть g(t) = u(t — 7г/к) f(t — п/к), где f(t) — функция из задачи 29 и к > 0. Обратите
внимание, что h(t) = f(t) + g(t) — двухполупериодное выпрямление sin kt, показанное на
рис. 7.5.17. Пользуясь этим, выведите из задачи 29, что
L{h(t)} =
Kt)
к ns
^TJ^C°th2fe-
2к
Ък
Рис. 7.5.17. Двухполупериодное
выпрямление sin kt
В задачах 31-35 для системы, состоящей из материальной точки заданной массы, закрепленной на
пружине с поршнем, даются значения массы т, сисесткости пружины к и сопротивления поршня
с. Кроме того, задана таксисе внешняя вынуждающая силовая функция f(t). Решите задачу Коши
(задачу с начальными условиями)
тх" + сх + кх = /(*), х@) = х'@) = 0
и начертите график функции, дающей положение x(t).
31. т = 1, к = 4, с = 0; f(t) = 1, если 0 й t < 7г, f(t) = 0, если t ^ 7г
7.5. Периодические и^кусочно^непрерывные входные функции 677
32. т = 1, к = 4, с = 5; /(*) = 1, если 0 й t < 2, /(*) = 0, если t ^ 2
33. m = 1, fc = 9, с = 0; /(£) = sin*, если 0 ^ t ^ 2тг, /(t) = 0, если t > 2тг
34. т = 1, fc = 1, с = 0; /(£) = £, если 0 ^ * < 1, f(t) = 0, если £ ^ 1
35. т = 1, А; = 4, с = 4; /(£) = £, если 0 ^ t ^ 2, f(t) = 0, если £ > 2
5 задачах 36-40 даются значения элементов цепи RLC. Решите задачу Коши (задачу с начальными
условиями)
Ljt 4- Ri + i f t(r) dr = e(t); t@) = 0
для заданного приложенного напряжения e(t).
36. L = 0, Я = 100, С = 10~3; e(t) = 100, если 0 ^ t < 1; е(*) = 0, если t ^ 1
37. L = 1, R = 0, С = Ю-4; e(t) = 100, если 0 ^ * < 2тг; e(t) = 0, если t ^ 2тг
38. L = 1, R = 0, С = 10~4; e(t) = 100 sin ltit, если 0 ^ t < тг; e(t) = 0, если t ^ тг
39. L = 1, R = 150, С = 2 х Ю-4; e(t) = 100*, если 0 й t < 1; е(*) = 0, если t ^ 1
40. L = 1,R= 100, С = 4 х Ю-4; e(t) = 50*, если 0 ^ * < 1; e(t) = 0, если t ^ 1
5 задачах 41 и 42 задана система, состоящая из материальной точки заданной массы,
закрепленной на пружине с поршнем, причем к материальной точке приложена внешняя сила f(t). Согласно
предположению, х@) = х'@) = 0. Используйте метод примера 8, чтобы найти переходный
процесс и установившееся периодическое движение материальной точки заданной массы. Затем
нарисуйте график функции, дающей полоэюение x{t). Если вы захотите проверить ваш график
с помощью программы для численного решения дифференциальных уравнений, может быть полез-
но обратить внимание, что функция
f(t) = A[2u((t - тг)(* - 2тг)(* - Зтг) •
(t — 4?r)(t — 5тг)(* — бтг)) — 1]
имеет значение +А при 0 < t < тг, и значение —А, если тг < t < 27Г и т. д. и, следовательно,
на интервале [0, б7г] совпадает с функцией прямоугольного колебания (меандром), которая имеет
амплитуду А и период 2тг. (См. также определение функции прямоугольного колебания (меандра)
через пилообразные и треугольные волновые функции в приложении к этому разделу.)
41. т = 1, к = 4, с = 0; f(t) — функция прямоугольного колебания (меандра) с амплитудой 4
и периодом 27Г. х
42. т = 1, к = 10, с = 2; /(£) — функция прямоугольного колебания (меандра) с амплитудой 10
и периодом 27Г.
7.5. Приложение. Конструирование функций
В технических приложениях периодические кусочно-линейные функции часто
встречаются в качестве входных функций. Из-за этого периодические кусочно-линейные функции
иногда называют инженерными функциями. Вычисления с такими функциями легко
выполняются в системах компьютерной алгебры. В системе Mathematica, например, мы можем
определить пилообразную функцию, треугольную функцию и меандр:
SawTooth[t_] := 2 t - 2 Floor[t] - 1
TriangularWave[t_] := Abs[2 SawTooth[<2 t - l)/4]] - 1
SquareWave[t_] := Sign[ TriangularWave[t] ]
678 Глава 7. Методы преобразования Лапласа
Начертите каждую из функций, чтобы проверить, что она имеет период 2 и что ее название
(имя) выбрано так, что оно точно соответствует ее виду. Например, чертеж, получаемый
в результате выполнения команды
Plot[ SquareWave[t], {t, 0, 6}];
должен напоминать рис. 7.5.9. Если f{t\— одна из этих технических функций и р > О, то
функция fBt/p) будет иметь периоду. Чтобы проиллюстрировать это, попробуйте
выполнить соответствующий чертеж с помощью команды
Plot[ TriangularWave[ 2 t/p ], {t, 0, 3 p}];
при различных значениях р.
Теперь давайте рассмотрим уравнение системы, состоящей из материальной точки
заданной массы, закрепленной на пружине, с поршнем
diffEq = m xf,[t] + с х1[t] + k x[t] == input
для следующих выбранных значений параметра и входной вынуждающей функцией с
периодом р и амплитудой Fq .
m = 4; с = 8; к = 5; р = 1; F0 = 4;
input = FO SquareWave[2 t/p];
Вы можете начертить эту входную функцию, чтобы проверить, что она имеет период 1:
Plot[ input, {t, 0, 10}];
Наконец, давайте предположим, что материальная точка заданной массы первоначально
находится в покое в ее положении равновесия и решим численным методом полученную
задачу Коши (задачу с начальными условиями).
response = NDSolve[ {diffEq, x[0] == 0, х1[0] == 0},
х, {t, 0f 10}f MaxSteps -> 1000 ]
Plot[ x[t] /. response, {t, 0, 10}];
На полученном рис. 7.5.18 мы видим, что после того, как начальный переходный процесс
затух, функция-ответ x(t) успокаивается (как и ожидается?) и устанавливается
периодическое колебание с тем же самым периодом, что и на входе.
Исследуйте эту задачу Коши (задачу с начальными условиями) для нескольких значений
параметров системы, состоящей из материальной точки заданной массы, закрепленной на
Рис. 7.5.18. Ответ x(t) на
входное прямоугольное
колебание (меандр) периода 1
7t& Импульсы и дельта-функции 679
пружине, с поршнем — например, в качестве значений параметров выберите цифры номера
вашего студенческого билета — и возьмите различные входные сконструированные вами
функции, имеющие различные амплитуды и периоды.
7.6. Импульсы и дельта-функции
Рассмотрим силу /(£), которая действует только в течение очень короткого временного
интервала а й t й 6, причем /(£) = О в*не этого интервала. Типичным примером может
быть сила удара биты, когда игрок ударяет битой по мячу — соударение с шаром можно
считать почти мгновенным. Быстрый волнообразный всплеск напряжения (от удара молнии
во время грозы, например) — аналогичное электрическое явление. В такой ситуации часто
случается, что основной эффект силы зависит только от значения интеграла
Р=\ met о)
Ja
и не зависит от того, как именно f(t) изменяется со временем t. Число р в уравнении A)
называют импульсом силы f(t) на интервале [а, Ь].
В случае силы /(£), которая действует на частицу массы га, двигающейся по
прямолинейной траектории, интегрирование закона Ньютона
f(t) = mv'(t) = ±[mv(t)}
приводит к
Г6 d
р = — [гаг>(£I dt = mv(b) — mv(a). B)
Ja ft
Таким образом, импульс силы равен изменению импульса частицы. Таким образом, если
изменение импульса частицы — единственный рассматриваемый эффект, то необходимо знать
только импульс силы; ни точный вид функции /(£), ни даже точное значение временного
интервала, в течение которого она действует, несущественны. Это действительно везение,
потому что в ситуации, вроде удара по мячу, мы вряд ли можем иметь такую детальную
информацию о силе удара, которая действует на мяч.
Наша стратегия в изучении такой ситуации состоит в том, чтобы найти разумную
математическую модель, в которой неизвестная сила f(t) заменяется простой и явной силой,
которая имеет тот же самый импульс. Предположим для простоты, что f(t) имеет импульс
1 и действует в течение некоторого краткого временного интервала, начинающегося в
момент времени t — а ^ 0. Тогда мы можем выбрать фиксированное число е > 0, которое
приближает длину этого временного интервала, и заменить f(t) конкретной функцией
C)
в противном случае.
Это — функция от £, причем а и е — параметры, которые определяют временной интервал
[а, а + б]. Если Ь ^ а + б, то мы видим (рис. 7.6.1), что импульс da,€ на [a, b] равен
рб га+е
Р= da,e(t)dt= -dt-l.
Ja Ja ^
680 Глава 7. Методы преобразования Лапласа
а + е
Рис. 7.6.1. График
импульсной фуНКЦИИ da,e{t)
Таким образом, da,€ есть единичный импульс (дельта-импульс), независимо от величины
числа е. По сути, то же самое вычисление дает
de,€(t)A = l.
D)
Поскольку точный временной интервал, в течение которого действует сила, оказывается
несущественным, это позволяет говорить омгновенном импульсе, который происходит точно
в момент t = а. Мы могли бы попробовать смоделировать такой мгновенный едичный
импульс (дельта-импульс), взяв предел при е —► 0, таким способом определяя
Sa(t) = limda,6(£),
б—»0
E)
где а ^ 0. Если бы мы могли также взять предел под знаком интеграла в равенстве D), то
отсюда следовало бы, что
Sa(t)dt=l.
Но предел в равенстве E) равен
Sa(t)
{+оо,
0,
если t = a,
если t Ф а.
F)
G)
Очевидно, ни одна функция не может удовлетворить и F), и G); ведь если функция является
нулевой, кроме единственной точки, то ее интеграл равен не 1, а нулю. Однако, символ 8а (t)
очень полезен. Как бы его ни интерпретировали, он называется дельта-функцией (Дирака)
в честь английского ученого в области теоретической физики П. А. М. Дирака A902-1984),
который в начале 1930-х годов ввел "функцию", предположительно имеющую свойства,
выраженные в равенствах F) и G).
Дельта-функции как операторы
Следующее вычисление мотивирует значение, которое мы приписываем Sa(t). Если g(t) —
непрерывная функция, то из формулы Лагранжа для интегралов следует, что
га+б
[ g(t)dt = eg(t)
7.6. Импульсы и дельта-функции 681
для некоторой точки t в интервале [а, а + е]. Из этого следует, что
роо ра+б -^
lim g(t)da,e(t) dt = lim g{t) •-dt=\img (t) = g{a) (8)
по условию непрерывности д в точке £ = а. Если бы 5а(£) была функцией в строгом смысле
определения и если бы мы могли изменить порядок перехода к пределу и интеграл в
уравнении (8), мы могли бы заключить, что
g(tNa{i)dt~g{a).
(9)
Мы принимаем равенство (9) в качестве определения (!) символа 8a{t). Хотя мы
называем его дельта-функцией, это не подлинная функция; вместо этого это лишь определение
операции
роо
•'•Sa(t)dt,
JO
которая — когда применяется к непрерывной функции g(t) — просто просеивает (или
выбирает) значение g(а) этой функции в точке а ^ 0. Эта идея показана схематично на рис. 7.6.2.
Обратите внимание, что символ Sa(t) используется только в интегралах того типа, который
указан в равенстве (9), или когда этот символ появится впоследствии в интеграле такого
типа.
Функция
Рис. 7.6.2. Эта диаграмма,
иллюстрирует, как дельта-
функция "просеивает"
значение д(а)
Например, если в равенстве (9) взять g(t) = e~st9 то в результате получим
роо
e-3t6a(t)dt = e-as. A0)
Jo
Мы поэтому определяем преобразование Лапласа (изображение по Лапласу) дельта-функции
равенством
Если мы пишем
L{Sa(t)} = е~а8 (о^О).
6(t) = S0(t) и S(t - а) = 6a(t),
(П)
A2)
682 Глава 7. Методы преобразования Лапласа
то равенство A1) при а = 0 дает
L{6(t)}=*X A3)
Заметьте, что если бы S(t) была настоящей функцией, то равенство A3) противоречило бы
следствию теоремы 2 израздела 7.1, Здесь нет никакого противоречия; S(i)—это не функция,
а равенство A3) — всего лишь наше определение выражения L{S(t)}.
Дельта-функции на входе
Теперь, наконец, предположим, что у нас есть механическая система, ответ которой x(t) на
внешнюю силу f(t) определен дифференциальным уравнением
Ая/'+Щ^'+&зс = /(г). A4)
Чтобы исследовать ответ этой системы на едичйый импульс (дельта-импульс,
дельта-функцию Дирака) в момент t — а, кажется разумным заменить /(£) на 5а (t) и начать с уравнения
Ах" + Вх' + Cx = 8a(t). A5)
Но что подразумевать под решением такого уравнения? Мы будем называть x(t) решением
уравнения A5), если
x(t) = lims€(t), A6)
е-Ю
где хе (t) — решение уравнения
Ах" + Вх' + Сх = daj€(t). A7)
Поскольку
daM = \ М*) - MeW] A8)
представляет собой обычную функцию, уравнение A7) имеет смысл. Для простоты
предположим, что начальные условия имеют вид х@) = х'@) = 0. Когда мы преобразуем
уравнение A7), обозначая Х€ = L{#€}, мы получим уравнение
1 / „-as p-(a+e)s\ i __ 0-se
(As> + Bs + C)Xe(S) = i|l- - f-7—J = (e~as) -
se
Если мы возьмем предел в последнем уравнении при е —► 0 и заметим, что
lim 1-^ = 1
е-+о se
по правилу Лопиталя, мы получим уравнение
(As2 + Bs + C)X(s) = е~а\ A9)
если
X(s) = limXe(x).
е-»о
7.6. Импульсы и дельта-функции 683
Обратите внимание, что это точно тот же самый результат, который мы получили бы, если
бы преобразовали само уравнение A5), учитывая, что L{Sa(t)} = е~~аз.
На этом основании разумно решать дифференциальное уравнение, содержащее дельта-
функцию, используя метод преобразования Лапласа точно так, как будто Sa(t) является
обыкновенной функцией. Важно проверить, что решение, полученное таким образом,
совпадает с тем, которое определено в равенстве A6), но чтобы установить условия, при которых
это верно, потребуется очень глубокий анализ техники применения используемых
предельных переходов; мы считаем это выходящим за рамки настоящего обсуждения. Формальный
метод имеет силу во всех примерах этого раздела и дает правильные результаты во всех
последующих прикладных задачах.
Пример 1
Материальная точка заданной массы га = 1 закреплена на пружине с
константой к — 4; демпфирования нет. Материальная точка заданной массы
отпущена из состояния покоя при х@) = 3. В момент t = 27г по
материальной точке заданной массы ударяет молоток, при этом импульс р = 8.
Определим движение материальной точки заданной массы.
Решение Мы должны решить задачу Коши (задачу с начальными условиями)
х" + 4х = 8*2* (t); х@) = 3, х'@) = 0.
Мы применяем преобразование Лапласа (изображение по Лапласу) и
получаем
s2X(s) - 3s + 4Х(в) = 8е-2™,
так что
3s 8e~2™
X(S) = -тг—г +
Вспоминая преобразования синуса и косинуса, а также теорему о сдвигах
по оси ^(теорема 1 из раздела 7.5), мы видим, что оригинал функции имеет
вид
x(t) = 3 cos 2t + 4u(t - 2тг) sin 2(t - 2тг) =
= 3 cos 2t + 4u2*(t) sin 2t.
Поскольку 3 cos 2t + A sin 2t = 5 cosB£ - а) при а = arctgD/3) w 0,9273,
отдельное рассмотрение случаев t < 2n и t ^ 27г дает
X(t):
3cos2£,
если t ^ 27Г,
5 cosBt - 0,9273), если t ^ 2тг.
Полученное движение показано на рис. 7.6.3. Обратите внимание, что
изменив импульса при t = 2тг приводит к заметному разрыву в
значении скорости при t = 27г, поскольку она скачкообразно (мгновенно)
увеличивает амплитуду колебаний материальной точки заданной массы
от 3 до 5. ■
684 Глава 7. Методы преобразования Лапласа
6
н О
х = -3
-6
ГтН1 П П /I /I
t-2n
1
---к--л-- ii--U = 5
! ! И М
U U U У (Л
»./ \* 0_iL_5
_ -if к. _
о
2я 4я
6я
Рис. 7.6.3. Движение материальной
точки заданной массы в примере 1
lh
/
Рис. 7.6.4. Аппроксимация
Ua(t) С ПОМОЩЬЮ Ua,e(t)
Дельта-функции и ступенчатые функции
И в самом деле полезно рассматривать дельта-функцию Sa(t) как производную единичной
ступенчатой функции (функции Хевисайда) иа (t). Чтобы увидеть, почему это действительно
разумно, рассмотрим непрерывную аппроксимацию ua,t{t) к иа (t), показанную на рис. 7.6.4.
Легко проверить, что
Поскольку
dt
ua(t) = Kmua,e(t) и Sa(t) = lim da,€(t),
изменение порядка предельного перехода и взятия производной приводит к
—ua{t) = lim — ua,e(t) = limda,€(t),
at e-~>o at e—>o
и поэтому
£
dt
Ua(t)=6a(t)=6(t-a).
B0)
Мы можем рассматривать это как формальное определение производной единичной
ступенчатой функции (функции Хевисайда), хотя ua(t) не дифференцируема в обычном смысле
в точке t = а.
Пример 2
Мы снова рассмотрим цепь RLC, состоящую из сопротивления,
индуктивности и емкости. (Мы ее уже рассматривали в примере 5 из раздела 7.5.)
Вот ее параметры: R = 110 f2, L = 1 генри, С = 0,001 фарады; причем
она подсоединена к батарее, у которой ео = 90 В. Предположим, что цепь
первоначально пассивна—никакие токи в ней не текут, а заряд
отсутствует. В момент времени t = 0 выключатель замыкают, а в момент времени
t — 1 его размыкают и оставляют разомкнутым. Найдем полученный ток
г(£)вцепи.
7.6. Импульсы и дельта-функции 685
Решение В разделе 7.5 мы обошли разрыв в напряжении, используя интегродиф-
ференциальную форму уравнения цепи. Теперь, когда доступны дельта-
функции, мы можем начать с обыкновенного уравнения цепи
Li" + m' + y = e'(t).
В этом примере мы имеем
e(t) = 90 - 90u(t - 1) = 90 - 90«i(t),
tax.что e' ^ = -90S(t - 1) в соответствии с равенством A0).
Следовательно, мы хотим решить задачу Коши (задачу с начальными условиями)
г" + 110i'+ ЮООг =-90<5(t - 1); t@) = 0, t'@) = 90. B1)
То,чтог'@) = 90, следует из подстановки t = Овуравнение
Li'(t) + Ri(t) + -q{t) = e{t)
с числовыми значениями г@) = q@) — 0ие@) = 90.
Преобразовав задачу B1), получим уравнение
s2I(s) - 90 + 110eJ(e) + 10007(e) = -90e_s.
Следовательно,
/(.) = ■ .Mi1-Г"-).-
Пример 3
s2 + 110s + 1000"
Это TC4WO то же самое преобразование (образ) I [з)9 которое мы нашли
в примере 5 из раздела 7.5, так что обратное преобразование I(s) даст то
же самое решение г (t), которое было получено прежде. ■
Рассмотрим материальную точку заданной массы на пружине, причем
пусть га = к = 1 и х@) = х'@) = 0. В каждый из моментов t — 0,7Г, 27г,
37Г,..., П7г,... по материальной точке заданной массы ударяют
молотком, при этом импульс можно считать единичным (дельта-импульсом).
Определим полученное движение.
Решение Мы должны решить задачу Коши (задачу с начальными условиями)
оо
п=0
Поскольку L{5n7r(£)} = e~n7rs, преобразованное уравнение имеет вид
оо
п—0
686 Глава 7. Методы преобразования Лапласа
так что
00 £ — П1Т8
X(s)=J2
ns2 + l'
n=0
Мы вычисляем обратное преобразования Лапласа (изображения по
Лапласу) почленно; в результате получаем
x{i) = Vj u(t — птг) sin(£ — шг)..
n=0
Поскольку sin(t — шг) = (—l)n sint и u(t — nn) = О для t < птг, мы
видим, что если пп < t < (п + 1Oг, то
x(t) = sint — sint -\-sint — • • • + (—l)nsin£;
иными словами,
, ч I sin t, если п четное,
x(t) = <
I 0, если п нечетное.
Следовательно, x(t) — однополупериодное выпрямление sin t,
показанное нарис. 7.6.5. Физическое объяснение состоит в том, что после первого
удара молотком (в момент времени t = 0) материальная точка заданной
массы начинает двигаться вправо, а как только она возвращается в начало
координат, второй удар молотком останавливает ее и она остается
неподвижной, пока после третьего удара молотком она не начинает двигаться
снова и т. д. Конечно, если удары молотком не абсолютно
синхронизированы, то движение материальной точки заданной массы будет совершенно
другим. ■
x(t)
X^IXJA
2п Ък An
Рис. 7.6.5.
Однополупериодное выпрямление sin t
Системный анализ и принцип Дюамеля
Рассмотрим физическую систему, в которой выходной сигнал, или ответ, x(t) на входную
функцию f(t) описывается дифференциальным уравнением
ах" + Ъх' + сх = f{t), B2)
где постоянные коэффициенты а, 6 и с определены физическими параметрами системы и не
зависят от f(t). Система, состоящая из материальной точки заданной массы,
закрепленной на пружине, с поршнем и последовательная цепь RLC, состоящая из сопротивления,
индуктивности и емкости,—знакомые нам примеры таких часто встречающихся систем.
7.6, Импульсы и дельта-функции 687
Для простоты мы предположим, что система первоначально пассивна: х@) = х'@) = 0.
Тогда преобразование уравнения B2) будет иметь вид
as2X(s) + bsX(s) + cX{s) = F(s),
так что
x^ = ^Tt7T-c = WMFM- <23>
Функцию
W(s) = —0—г B4)
w as2 + bs + с '
называют передаточной функцией системы. Таким образом, преобразование ответа на
вход f(t) представляет собой произведение W(s) и преобразования F(s).
Функция
w(t) = L-'iWis)} B5)
' называется весовой функцией (функцией потерь) системы. Из уравнения B4) с помощью
свертки мы находим, что
x{t) = f w(r)f(t - т) dr. B6)
Jo
Эта формула выражает принцип Дюамеля для данной системы. Важно то, что весовая
функция (функция потерь) w(t) определена полностью параметрами системы. Если w(t)
определена, интеграл B6) дает ответ системы на произвольную входную функцию / (t).
Пример 4
Рассмотрим систему, состоящую из материальной точки заданной массы,
закрепленной на пружине, с поршнем. (Первоначально система
пассивна.) Пусть ответсистемы на внешнюю силу / (t) определяется уравнением
хи + 6х' + Юж = f(t). Тогда
W(s) = 1
s2 + 6s + 10 (s + ЗJ + 1'
так что весовая функция (функция потерь) имеет вид w(t) = e~3t sin t.
Тогда из принципа Дюамеля следует, что ответ х (t) на силу / (t) имеет вид
x(t) = [ e~3r(sinT)/(* - г) dr. Ш
Jo
Обратите внимание, что
1 L{S(t)}
W(a)
as2 + bs + с as2 + bs + c'
Следовательно, из уравнения B3) следует, что весовая функция представляет собой просто
ответ системы на входную дельта-функцию 6(t). По этой причине w(t) иногда называется
688 Глава 7. Методы преобразования Лапласа
ответом на единичный сигнал, ответом на единичный импульс, ответом на дельта-
импульс, или ответом на дельта-функцию (Дирака). Однако практически обычно проще
измерить ответ h(t) на единичную ступенчатую функцию (функцию Хевисайда) u(t); h(t) —
реакция на единичный екачок, т. е. на единичную ступенчатую функцию или на единичный
перепад (единичную ступеньку). Поскольку L{u(t)} = 1/s, из уравнения B3) мы видим,
что преобразование h{t) имеет вид
H(s) = Ш.
S
Из формулы для преобразований интегралов следует, что
h(t) = I w(r)dr, такчто w(t) = h'(t). B7)
Jo
Таким образом, весовая функция, или ответ на единичный сигнал (ответ на единичный
импульс, ответ на дельта-импульс, или ответ на дельта-функцию (Дирака)), является
производной реакции на единичный скачок, т. е. на единичную ступенчатую функцию или
на единичный перепад (единичную ступеньку). Подставляя B7) в формулу, выражающую
принцип Дюамеля, получаем
x(t)= [ ti(t)f(t-T)dr B8)
Jo
в качестве ответа системы на вход f(t).
Приложения. Чтобы описать типичное применение равенства B8), предположим, что
мы имеем сложную последовательную цепь, содержащую много катушек индуктивности,
резисторов и конденсаторов. Предположим, что уравнение этой цепи представляет собой
линейное уравнение вида B2), но вместо х неизвестная обозначена через г. Что случится,
если коэффициенты а, 6 и с неизвестны, например из-за того, что их слишком трудно
вычислить? Мы все равно хотели бы знать ток i(t), соответствующий произвольно заданному
входному сигналу f(t) = e'{t). Мы подключаем цепь к источнику линейно возрастающего
напряжения e(t) = t9 так что f(t) = e'(t) = 1 = u(t), и измеряем ответ h(t) амперметром.
Мы затем вычисляем производную h'(t), численными методами или графически. Тогда
согласно уравнению B8), выходной ток i(t)9 соответствующий входному напряжению е(£),
будет давать формула
i(t)= \ hf(r)ef(t-r)dr
Jo
(используем то, что /(£) = e'(t)).
Историческое замечание. В заключение мы отметим, что около 1950 года, уже после
того, как инженеры и физики широко и плодотворно использовали дельта-функции в течение
приблизительно 20 лет без строгого обоснования, французский математик Лоран Шварц
(Laurent Schwartz) создал строгую математическую теорию обобщенных функций, которая
восполнила логический недостаток и стала основой для применения методов, основанных
на использовании дельта-функции. Каждая кусочно непрерывная обыкновенная функция
является обобщенной функцией, но дельта-функция — пример обобщенной функции,
которая не является обыкновенной функцией.
7.6. Импульсы и дельта-функции 689
7.6. Задачи
В задачах 1-8 решите данные задачи Коши (задачи с начальными условиями) и начертите график
каждой функции-решения x(t).
1. ж" + 4х = 5(t); х@) = ж'@) = О
2. х" + 4х = 5(t) + 5(t - тг); ж(О) = ж'@) = О
3. х" + Ах' + 4х = 1 + 6(t - 2); ж(О) = ж'@) = О
4. х" + 2х' + ж = t + £(t); ж(О) = О, ж'@) = 1
5. х" + 2ж' + 2х = 2<*(t - тг); ж(О) = ж'@) = О
6. х" + 9х = £(t - Зтг) + cos3t; ж(О) = ж'(О) = О
7. х" + 4ж' + 5ж = £(* - тг) + S(t - 2тг); ж(О) = О, ж'@) = 2
8. х" + 2ж' + х = <J(t) - <J(t - 2); ж(О) = ж'@) = 2
5 задачах 9-12 примените принцип Дюамеля и напишите интегральную формулу для решения
каждой данной задачи Коши (задачи с начальными условиями).
9. х" + 4х = /(t); х(О) = ж7@) = О 10. ж" + 6ж' + 9ж = /(t); ж@) = ж'@) = О
И. х" + 6ж' + 8ж = /(*); ж@) = ж'@) = 0 \2. х" ч+ 4ж' + 8ж ^= /(*); ж@) = ж'@) = О
13. В этой задаче рассматривается материальная точка массы га, первоначально находящаяся в
покое в начале координат. В момент времени t = 0 она получает импульс р. (а) Найдите решение
xe{t) задачи
тх" = pdo,e(t); ж@) = ж'@) = 0.
(b) Покажите, что lim xe(t) является решением задачи
тх" = p6(t); ж@) = ж'@) = 0.
(c) Покажите, что mv = р для t > 0 (v = dx/dt).
14. Решая задачу
х = 6(t - а); ж@) = О,
найдите ее решение x(t) = u(t — а) и проверьте, что uf(t — а) = 5(t — а).
15. В этой задаче рассматривается материальная точка массы га на пружине (с константой к),
которая получает импульс ро = mvo в момент времени t = 0. Покажите, что решения задач
Коши (задач с начальными условиями)
тх" + кх = 0; ж@) = 0, х'@) = vo
и
тх" + кх = po6(t)\ ж@) = 0, ж'@) = О
совпадают. Таким образом, влияние poS(t) действительно состоит в том, чтобы передать
частице начальный импульс ро.
16. Эта, задача является обобщением задачи 15. Покажите, что решения задач
ах" + Ъх + сх — /(£); ж@) = 0, х'@) = vo
и
ах" + Ьх + сх = f(t) + avo6(t); ж@) = ж'@) = 0
совпадают для t > 0. Таким образом, слагаемое avo6(t) выражает начальное условие ж'@) =
= VQ. 1
690 Глава 7. Методы преобразования Лапласа
17. Рассмотрим первоначально пассивную цепь RC, состоящую из емкости и резистора (но без
катушек индуктивности), которая подключена к батарее с напряжением ео вольт, (а)
Выключатель батареи замыкают в момент времени t = а и размыкают в момент времени t = Ь > а
(и оставляют разомкнутым после этого). Покажите, что ток в цепи является решением задачи
Коши (задачи с начальными условиями)
Ш! + iz = e0S(t - а) - e06(t - 6); г@) = 0.
О
(Ь) Решите эту задачу, если R = 100 Q, С = 10~4 фарады, ео = 100 В, а = 1 (секунд), и Ь = 2
(секунд). Покажите, что i{t) > 0, если 1 < t < 2 и что i{i) < б, если t > 2.
18. Рассмотрим первоначально пассивную цепь LC, состоящую из емкости и индуктивности (но без
резисторов), которая подключена к батарее с напряжением ео вольт, (а) Выключатель батареи
замыкают в момент времени t — 0 и размыкают в момент времени t = а > 0, Покажите, что
ток в цепи является решением задачи Коши (задачи с начальными условиями)
Ы +-i:
eoS(t) — eo8(t — а);
г@) = г'@) = 0.
(b) Пусть L = 1 генри, С = 10~~2 фарады, ео = 10 В и а = 7г (секунд). Покажите, что
т
"\о,
sin 10t,
если t < 7г,
если t > 7г.
Таким образом, ток совершает пять циклов колебаний и затем резко останавливается, когда
выключатель размыкают (рис. 7.6.6).
Рис. 7.6.6. Функция, дающая ток в
задаче 18
19. Рассмотрим цепь цепь LC, состоящую из емкости и индуктивности из задачи 18 (Ь), но пусть
теперь выключатель поочередно замыкают и размыкают в моменты времени t = 0, тг/10,27г/10,
(а) Покажите, что i(t) является решением задачи Коши (задачи с начальными условиями)
оо
г" + 100» = 10 ^(-l)n<j(t - ~) ; »@) = «'@) = 0.
(Ь) Решите эту задачу Коши (задачу с начальными условиями) и покажите, что
»(t) = (п + 1) sin 10t, если yj < t < (П |1)?Г.
Таким образом, в этом случае наблюдается явление резонанса (рис. 7.6.7).
7.6. Импульсы и дельта-функции 691
Рис. 7.6.7, Функция, дающая ток в
задаче 19
20. Снова решите задачу 19, но пусть теперь выключатель поочередно замыкают и размыкают
в моменты времени t = О,7г/5, 2тг/Б, ..., П7г/5, Покажите, что теперь, если
П7Г , (п + 1OГ
Т*'* б"'
то
*(*)
{si]
о,
sin 10t, если п четное;
если п нечетное.
Таким образом, ток в чередующихся циклах длины 7г/5 сначала колеблется по синусоиде
в течение одного цикла, затем отсутствует в течение следующего цикла и т. д. (рис. 7.6.8).
Рис. 7.6.8. Функция, дающая ток в
задаче 20
21. Рассмотрим последовательную цепь RLC, состоящую из сопротивления, индуктивности и
емкости. Ее параметры: L = 1 генри, R = 60 fi, С = 10~3 фарады. Эта цепь подключена к батарее,
причем ео = 10 В. (а) Предположим, что выключатель поочередно замыкают и размыкают
в моменты времени t = 0, 7г/10, 27г/10, Покажите, что i(t) является решением задачи
Коши (задачи с начальными условиями)
г" + 60г' 4- Ю00г = 10 ^(-l)nE(t - ~J)
г@)=г'@) = 0.
(b) Решите эту задачу и покажите, что если
П7Г (П+ 1)ТГ
То < *< ю '
692 Глава 7. Методы преобразования Лапласа
Зптг+Зтг -I
i(t) = ^—- -~±e-30t sin 10*.
' е37Г - 1
Начертите график этой функции, дающей ток.
22. Рассмотрим систему, состоящую из материальной точки массы т = 1, закрепленной на
пружине с константой к = 1, первоначально находящуюся в состоянии покоя. В каждый из
моментов t = О, 27г, 47г, ... по материальной точке ударяют молотком. Предположим, что каждый
удар молотком передает импульс +1. Покажите, что функция, позволяющая вычислить
положение x(t) материальной точки заданной массы, является решением задачи Коши (задачи
с начальными условиями)
оо
х" + х = ]Г 6(t - 2птг); ж@) = ж'@) = 0.
п=0
Решите эту задачу и покажите, что если 2птг < t < 2(п + 1Oг, то x(t) = (п + 1) sint. Таким
образом, резонанс происходит, потому что по материальной точке заданной массы ударяют
молотком каждый раз, когда она проходит через начало координат, двигаясь вправо — в отличие от
примера 3, в котором материальную точку заданной массы ударяли молотком каждый раз, когда
она возвращалась в начало координат. Наконец, начертите график этой функции, позволяющей
определить положение.
ГЛАВА
Методы
степенных рядов
8.1. Введение и обзор теории степенных рядов
В разделе 3.3 мы видели, что решение однородного линейного дифференциального
уравнения с постоянными коэффициентами можно свести к алгебраической задаче
вычисления корней его характеристического уравнения. Однако для того чтобы решить линейные
дифференциальные уравнения с переменными коэффициентами, никакой подобной
процедуры нет, по крайней мере нет достаточно простой процедуры, позволяющей найти решение
за конечное число шагов. За исключением уравнений специальных типов и специально
подобранных уравнений, которые можно решить подбором, линейные уравнения с переменными
коэффициентами, вообще говоря, требуют применения методов степенных рядов,
рассматриваемых в этой главе.
Эти методы вполне удовлетворительно подходят для решения многих неэлементарных
дифференциальных уравнений, которые чаще всего появляются в приложениях. Возможно,
наиболее важное из таких уравнений (из-за его приложений в таких областях, как акустика,
распространение тепла и электромагнитные излучения) — уравнение Бесселя порядка п:
> х2у" + ху' + (х2 - п2)у = Я.
Уравнение Лежандра порядка п также важно во многих приложениях. Оно имеет вид
> A-х2)у"-2ху'+ п{п + 1)у = Ъ.
Э этом разделе мы познакомимся с методом степенных рядов в его самой простой
форме и, по пути, установим (без доказательства) несколько теорем, которые составляют
обзор основных фактов о степенных рядах. Сначала напомним, что степенной ряд по
[степеням] х — а — это бесконечный ряд вида
оо
]Pcn(:r-a)n = со + ci(x -a) + с2(х -цJ Н Ь сп(х - а)п Н . A)
71=0
694 Глава 8. Методы степенных рядов
Если а = О, это — степенной ряд по степеням х:
оо
> ^2 спхп = со + cix + е2х2 + •-• + спхп + • • • . B)
71=0
Мы ограничим наш обзор главным образом степенными рядами по степеням х, но каждое
общее свойство степенного ряда по степеням ж может быть переформулировано как общее
свойство степенных рядов по степеням х — а заменой х на х — а.
Степенной ряд B) сходится на интервале /при условии, что предел
оо N
У2спхп= lim Гсп/ C)
*—' N—юо ■*—'
71=0 71=0
существует для всех х на интервале 7. В этом случае сумма
оо
/И = ^спхга D)
71=0
определена на интервале I, и мы называем ряд £) спхп представлением функции / на
интервале / в виде степенного ряда. Следующие представления элементарных функций
в виде степенного ряда должны быть знакомы вам из вводного курса анализа:
/»• \ > X XX ,тч
е =£^ = 1 + а;+2! + 3!+-; E)
п=0
V2 X4
^ Bп)! ~.* 2Г + ¥
n=0 v '
cos*=£Sb- = 1-oT + 7r----; F)
^(-l)nx2n+1 х3 ж5
S1D* = E Bw + 1), =ж-3! + 5!----; (?)
71=0 V '
v^ х - х х JL4
созЬа; = ЕB^!=1+2Г+4!+---; *>
n=0 v y
. u ^ x2"+1 x3 x5
sinha; = LB^T)!=X+3! + 5!+'"; (9)
71=0 Ч '
w, ч ^ (-l)n+1x" x2 x3
n^ 2 3
71=1
A0)
1 °°
—L_ = y"xn = l + x + x2 + x3 + .--; A1)
1-х ^—'
n=0
a(a-l)x2 a(a - l)(a - 2)x3 „_4
A + x)a = 1 + ax + y } + -^ ^ ^— + • • • . A2)
8.1. Введение и обзор теории степенных рядов 695
В компактном обозначении со знаком суммы мы соблюдаем обычные соглашения о том, что
О! = 1 и что х° = 1 для всех х, включая х = 0. Ряды E)-(9) сходятся к указанным функциям
для всех х. Напротив, ряды A0) и A1) сходятся лишь при \х\ < 1, но расходятся при |х| > 1.
(Что, если \х\ = 1?) Ряд A1) — бесконечная геометрическая прогрессия. Ряд A2), где
а — произвольное вещественное число, является биномиальным рядом. Если а является
неотрицательным целым числом, то биномиальный ряд сходится для всех х. В противном
случае он сходится, если |х| < 1, и расходится, если \х\ > 1; его поведение для |х| = 1
зависит от значения а.
Замечание. Степенной ряд типа перечисленных в разложениях E)—A2) часто
получается как ряд Тейлора. Ряд Тейлора с центром х = а функции / — это степенной ряд
> g ^^(* - а)п = Да) + /'(а)(х - а) + ^(х - аJ + • • • A3)
по степеням х — а, в предположении, что / является бесконечно дифференцируемой в точке
х = а (так что все коэффициенты в уравнении A3) определены). Если а = 0, то ряд A3) —
это ряд Маклорена
±m^.m+rvi),+£^+iSA,+.... A3'>
71=0
Например, предположим, что/ (х) = ех. Тогда f^n\x) — ех, и, следовательно, /^п^@) = 1
для всех п ^ 0. В этом случае равенство A3') приводит к экспоненциальному ряду E). ■
Операции над степенными рядами
Если ряд Тейлора функции / сходится к функции f(x) для всех х в некотором открытом
интервале, содержащем а, то мы говорим, что функция / является аналитической в точке
х = а. Например, каждый многочлен является аналитическим всюду и каждая рациональная
функция является аналитической везде, где ее знаменатель отличен от нуля. Верно даже более
общее утверждение: если две функции / и д являются аналитическими в точке х = а, то
аналитическими в точке х = а являются и их сумма / + д, их произведение / • #, а также их
частное f/g, еслид{а) ф 0.
Например, функция h(x) — tgx = (sin ж)/(cos х) является аналитической в точке х = 0,
потому что cos 0 = 1 Ф 0, а функции синус и косинус являются аналитическими (поскольку
они имеют представления в виде сходящихся степенных рядов, данных в равенствах F)
и G)). Довольно неуклюже выглядело бы вычисление ряда Тейлора для функции тангенс
с помощью ряда A3) из-за возрастания сложности вычисления последовательных
производных этой функции (попробуйте вычислить их!). К счастью, над степенными рядами можно
выполнять алгебраические операции почти таким же способом, как над многочленами.
Например, если
Дж) = 5>пхп и g{x) = Y,bnxn, A4)
71=0 71=0
ТО
оо
fix) + д(х) = £>п + Ъп)хп A5)
п-0
696 Глава 8. Методы степенных рядов
f(x)g(x) = ^cnxn =
п=0
= a>obo + (aobi -f a\bo)x + (ao&2 + a\b\ + a2&o)# +
(i6)
гдесп = aobn + aibn-i H ЬапЬо-РядA5)—результат почленного сложения, а ряд A6)—
результат формального умножения — умножения каждого члена первого ряда на каждый
член второго с последующим выполнением операции приведения подобных степеней х,
при которой суммируются коэффициенты подобных членов. (Таким образом, эти действия
сильно напоминают сложение и умножение обыкновенных многочленов.) Ряды A5) и A6)
сходятся к f(x) + д{х) и f(x)g(x) соответственно, притом на любом открытом интервале,
на котором сходятся оба ряда A4). Например,
sin х cos х
= I X X'
\ 6
3 4- —х5
■)Н^--)-
=I+(-l-l)x'+(h+T2+m)xi+-
х -
1
2
4 3 16 5
6 120
■ы-0£+вя.-..:_
1 • о
= - sm 2x
2
для всех х.
Точно так же частное двух степенных рядов может быть вычислено делением в столбик,
как проиллюстрировано вычислением, показанным на рис. 8.1.1. Это деление ряда Тейлора
для cos x на ряд для sin x приводит к первым немногим членам ряда
1 з 2 5 17 7
tg* = *+3* +1^+315* +•'
A7)
Деление степенных рядов более обманчиво, чем умножение; ряд, полученный таким
методом для f/g, может не сходиться в некоторых точках, где сходятся оба ряда для / и д.
Например, ряды для синуса и косинуса сходятся для всех х, но ряд для тангенса A7)
сходится, только если \х\ < 7г/2.
Метод степенных рядов
Метод степенных рядов поиска решений дифференциальных уравнений состоит в
подстановке степенного ряда
■ = Х>*п
A8)
п=0
8.1. Введение и обзор теории степенных рядов 697
х3 2хъ Их1
Х * Т + 15" + llF +
X2 X4 X6 \ X3 ХЪ X7
~У + 24~ 720 "^ I Х У + 120 5040 +
X3 ХЪ X7
У + 24 720 +
X3 ХЪ X7
Т ~ 30 + 840 +
X3 X5 X7
У ~ У + 72
2хъ Ах7
5" ~ 315
+
х7
2хъ
15 15 +
17ж7
315
+
Рис. 8.1.1. Получение ряда для tg x делением рядов
в дифференциальное уравнение и последующей попытке определить значения
коэффициентов со, сь С2,... так, чтобы полученный степенной ряд удовлетворял дифференциальному
уравнению. Это напоминает метод неопределенных коэффициентов, но теперь мы должны
определить значения бесконечного множества коэффициентов. Этот метод не всегда
приводит к успеху, но когда это так, мы получаем представление решения в виде бесконечного
ряда, в отличие от решения в (конечном) аналитическом виде, к которому приводили наши
предыдущие методы.
Прежде чем подставить степенной ряд A8) в дифференциальное уравнение, мы должны
сначала знать, чем заменить производные у', у", Следующая теорема
(сформулированная без доказательства), говорит нам, что производная у' ряда у = ^ спхп получается
простой процедурой: в качестве производной нужно записать сумму производных от членов
ряда для у.
Теорема 1
698 Глава 8. Методы степенных рядов
Почленное дифференцирование степенного ряда
Если представление функции / в виде степенного ряда
оо
> f(x) = ^2 спхП = со + с\х + с2х2 + сзх3 Н
п=0
сходится на открытом интервале I, то / дифференцируема на интервале I, причем
оо
> f'(X) = ^2 ПСпхП~1 = с1 + 2с2х + ЗС3Х2 + • • •
A9)
B0)
71=1
в каждой точке интервала I.
Например, дифференцирование геометрического ряда (бесконечной геометрической
прогрессии)
1 °°
= У^хп = l + x + x
l— х *-'
п=0
2+х3 + .
A1)
приводит к равенству
A-х)
1 °°
—_ = ]Г пх71-1 = 1 + 2х + Зх2 + 4х3 +
п=1
Суть процесса определения коэффициентов ряда у = Y1 спхп состоит в том, чтобы
полученный ряд удовлетворял данному дифференциальному уравнению. Однозначность
определения коэффициентов гарантируется теоремой 2. Эта сформулированная (без
доказательства) теорема гласит, что если два степенных ряда представляют ту же самую функцию,
то они, по сути, представляют собой один и тот же самый ряд. В частности, ряд Тейлора A3)—
единственный степенной ряд (по степеням х — а), который представляет функцию /.
Теорема 2
Принцип тождественности
Если
оо оо
]Г апхп = ]Р Ьпхп
71=0 71=0
для каждой точки х в некотором открытом интервале /, то ап = Ьп для всех п ^ 0. ▲
В частности, если ^2апхп — 0 для всех х в некотором открытом интервале, то из
теоремы 2 следует, что ап — 0 для всех п ^ 0.
Пример 1
Решим уравнение у' + 2у = 0.
8.1. Введение и обзор теории степенных рядов 699
Решение Мы подставляем ряды
оо оо
у = ]ССпхП и yf = Y1 псп^п~1\
п=0 п=1
в результате получаем равенство
JT пспо:71 + 2 JT cnzn = 0. B1)
71=1 71=0
Чтобы приравнять здесь коэффициенты, нам нужно найти выражение
общего члена в каждой сумме, т. е. выражение члена, содержащего хп.
Чтобы достичь этого, мы сдвигаем индекс суммирования в первой сумме.
Чтобы увидеть, как это делается, обратите внимание, что
оо оо
У^ пспхп~1 = а +2с2х + Зс3х2 Н = ]Г](гс + 1)сп+1хп.
п=1 п=0
Таким образом, мы можем заменить п на п + 1, если в то же самое время
мы начнем отсчет на один индекс раньше; т. е. от п = 0, а не от п =
= 1. Это и есть сдвиг индекса суммирования на +1. Результат сдвига
в равенстве B1) можно записать в виде тождества
оо оо
Y,(n + l)cn+ixn + 2 J2 сп*п = 0;
п=0 п=0
иными словами,
оо
Y^[(n + l)cn+i + 2cn}xn = 0.
п=0
Если это равенство выполняется на некотором интервале, то из принципа
тождественности следует, что (п + l)cn+i + 2сп = 0 для всех п ^ 0;
следовательно,
Сп+1 = ГТ B2)
п + 1
для всех п ^ 0. Равенство B2)—рекуррентная формула, по которой мы
можемпоследовательновычислитьсх,С2,сз,..., зная со; последний
коэффициент оказался произвольной постоянной, которая, как и ожидалось,
должна войти в общее решение дифференциального уравнения первого
порядка.
При п = 0 из равенства B2) получаем
2с0
d = - —•
При п = 1 из равенства B2) получаем
2ci 22с0 22с0
с2 = -— =+_ = _
700 Глава 8. Методы степенных рядов
При п = 2 из равенства B2) получаем
- _^ - 2?с0 _ 23co
Сз_ 3 ~ 1-2-3 ~ 3! '
Теперь должно быть понятно, что после п таких шагов мы будем иметь
с„ = (_1)»2^о, • , „^1.
п!
(Это просто доказать индукцией по п.) Следовательно, наше решение
принимает вид
у(Х) = £>• - £<-ir^*"=<* Е ^ = ™-2х-
п=0 п=0 п=0
В заключительном шаге мы использовали знакомый экспоненциальный
ряд (равенство E)), чтобы отождествить полученный нами степенной ряд
с ранее найденным решением того же самого уравнения; как вы,
возможно, помните, решение у{х) = сое~^х мы получили методом разделения
переменных. ■
Сдвиг индекса суммирования
В решении примера 1 мы написали
оо оо
Епспж"-1 = Е(п + ^«Vh-i*", B3)-
71=1 71=0
сдвигая индекс суммирования на +1 в ряде слева. Иными словами, мы одновременно
увеличили индекс суммирования на 1 (заменяя п на п + 1, п —> п + 1) и уменьшили начало отсчета
на 1, перейдя от п = 1 к п = 0, и таким образом получили ряд справа. Эта процедура
допустима, потому что каждый бесконечный ряд B3) — просто компактная система обозначений
для одного и того же ряда
а + 2с2х + Зс3х2 + 4с4#3 + • • • . B4)
Обобщая этот прием, мы можем сдвинуть индекс суммирования на А: в бесконечном ряде,
одновременно увеличивая индекс суммирования на к (п —> п 4- к) и уменьшая начальный
индекс на к. Например, сдвиг на +2 (п —> п + 2) дает
оо оо
п=3 п=1
Если к отрицательно, мы интерпретируем "уменьшение на /с" как увеличение на — к = \к\.
Таким образом, сдвиг на — 2 (п —> п — 2) в индексе суммирования дает
JT пспх71-1 = JT(n - 2)cn_2:rn-3;
n=l n=3
8.1. Введение и обзор теории степенных рядов 701
мы уменьшили индекс суммирования на 2, но увеличили начальное значение индекса на 2,
перейдя от п = 1кп = 3. Вы должны проверить, что процесс суммирования справа является
просто другим представлением ряда B4).
Мы знаем, что степенной ряд, полученный в примере 1, сходится для всех х, потому что
это экспоненциальный ряд. В более общей ситуации решение в виде степенного ряда, как
правило, не удается выразить через знакомые элементарные функции. Кдгда мы получаем
незнакомое решение в виде степенного ряда, нам необходим способ найти множество, на
котором он сходится. В конце концов, у = ]Г) СпХп — просто принятая форма решения.
Процедура, проиллюстрированная в примере 1 для нахождения коэффициентов {сп}9 —
просто формальный процесс и потому может привести либо к успеху либо просто
окажется формальным процессом, лишенным какого-либо смысла. Если эта процедура приводит
к решению, то ее законность основывается на применении теоремы 1 для вычисления у'
и применении теоремы 2, которая позволяет получить рекуррентную формулу для
коэффициентов. Но действительно ли она дает осмысленное решение — это зависит от сходимости
(а первоначально это как раз и неизвестно) ряда у = ]Г) СпХп. Следовательно, этот
формальный процесс законен, только если в конце мы сможем показать, что полученный степенной
ряд сходится на некотором открытом интервале. Если это действительно так, то тогда он
представляет собой решение дифференциального уравнения на этом интервале.
Следующая теорема (которую мы формулируем без доказательства) может использоваться для этой
цели.
Теорема 3
Радиус сходимости
Пусть задан степенной ряд ^2 сп%п и предел
гч*.-,-*■**>:?- **э** -;т-н' ;--.^f.f -^од«^ |"*^ ■>«"?•'^.'v*- ч»ч* -,л---| »---*,...»''. ..<* ■
lim
n—юо
Cn
Cn+1
B5)
существует (р является конечным) или бесконечен (в этом случае мы пишем р = оо). Тогда
(a) Если р = 0, то ряд расходится для всех х Ф 0.
(b) Если 0 < р < оо, то Y1 сп%п сходится, если \х\ < р, и расходится, если |ж| > р.
(c) Если р = оо, то ряд сходится для всех х. А
Число р в B5) называется радиусом сходимости степенного ряда ^ спхп. Например,
для степенного ряда, полученного в примере 1, мы имеем
lim
п—►оо
(-1)п2"со/п!
(-1)«+12п+1со/(п + 1)!
,. гс+1
= lim —7Г- = °°>
71—ЮО Z
и, следовательно, полученный в примере 1 ряд сходится для всех х. Даже если предел B5) не
существует, всегда найдется число р, такое что выполняется в точности одно из трех взаимно
исключающих утвержений, указанных в теореме 3. Это число иногда трудно вычислить, но
для степенных рядов, рассматриваемых в этой главе, равенства B5) будет вполне достаточно
для вычисления радиуса сходимости.
Пример 2
Решим уравнение (х — 3)у' + 2у = 0.
702 Глава 8. Методы степенных рядов
Решение Как и прежде, мы подставляем
оо оо
> y = YlСпхП и у'= Y1 псп^п~1
п=0 п=1
и получаем
оо оо
(х - 3) ^2 пспх71-1 4- 2 ]Г спхп = 0,
П—1 71=0
так что
оо оо оо
Y^ пспхп - 3 Y^ пспхп-у + 2 ^ СпХп = 0.
71=1 71=1 П=0
В первой сумме мы можем начать суммирование несп = 1,асп = 0;
это не окажет никакого эффекта на сумму. Во второй сумме мы сдвигаем
индекс суммирования на 4-1. Это приведет к равенству
оо оо оо
Y пспхп - 3 ]Г](п + l)c„+ia:n + 2 ]Г спхп = 0;
п=0 п=0 п=0
иными словами,
оо
]Г [псп - 3(гс 4- 1)сп+1 4- 2сп] жп = 0.
п=0
Принцип тождественности тогда дает соотношение
псп - 3(гс 4- l)cn+i 4- 2сп = 0,
и мы получаем рекуррентную формулу
3(п4 1)
Мы по очереди применяем эту формулу при п = 0, п = 1ип = 2
и находим, что
2 3 3 4 4
Cl=F3C(b C2 = F2Cl = 3^° и Сз = з^зС2 = з*00*
Этого почти достаточно, чтобы угадать общую формулу и по индукции
по п показать, что
w n+1 >i
> сп= пп с0, если пг1.
3П
Поэтому мы можем заключить, что представление решения в виде ряда
имеет вид
ОО -
VW^E2^*"- B6)
п—0
8.1. Введение и обзор теории степенных рядов 703
Его радиус сходимости
р = lim
Сп+1
= lim — = 3.
п-+оо П + 2
Таким образом, ряд в B6) сходится, если — 3 < х < 3, и расходится, если
|ж| > 3. В данном конкретном примере мы можем объяснить, почему это
так. Элементарное решение (полученное разделением переменных)
нашего дифференциального уравнения имеет вид у = 1/C — хJ. Если мы
продифференцируем почленно бесконечную геометрическую
прогрессию
1
оо
1 3 1 V- X
Ех
3-я 1 х 3^3*
мы получим ряд в B6), умноженный на некоторое постоянное число.
Таким образом, этот ряд (с соответственно выбранной произвольной
постоянной со) представляет решение
1
у(х) =
(з-*J
Пример 3
на интервале — 3 < х < 3, и особенность в точ^е х = 3 как раз и является
причиной, по которой радиус сходимости решения в виде степенного ряда
оказался равным р = 3. ■
Решим уравнение х1у = у — х — 1
Решение Мы делаем обычные подстановки у = YL спХп и у' = ^ пспхп г,
которые приводят к равенству
оо ч оо
X У ThCfiX ^— JL X "| У C"f\,X ^
71=1 71=0
так что
оо оо
У^ пспхп+1 = -1 - х + ]Р спхп.
п=1 п=0
Из-за присутствия в правой части двух слагаемых —1 и —х, мы должны
разбить первые два члена со 4- с\ х ряда справа для того, чтобы иметь
возможность почленного сравнения рядов. Если мы также сдвинем индекс
суммирования слева на —1 (заменим п = 1 на п = 2 и п на п — 1), мы
получим
оо
лХ
п—2 п—2
У^(П - 1)Сп-1Хп = -1 - X + Со 4" С\Х + ^^ СпЗ
Поскольку левая часть не содержит ни постоянного члена, ни члена,
содержащего х в первой степени, принцип тождественности теперь приводит
704
Глава 8. Методы степенных рядов
к соотношениям со = 1, с\ = 1 и сп — (п — l)cn_i для п ^ 2. Из этого
следует, что
с2 = 1 • а = 1!, сз = 2 • с2 = 2!, с4 = 3 • с3 = 3!,
и, вообще, что
>* сп = (п — 1)! для n ^ 2.
Таким образом, мы получаем степенной ряд
оо
у{х) = 1 4- х 4- ^(п - 1)! хп.
п=2
Но радиус сходимости этого ряда
Г (Г*)' < у l n
р = lim :— = lim — = 0,
п—+оо 711 n—+oo 71
так что ряд сходится только для х = 0. Что это означает? Просто то,
что данное дифференциальное уравнение не имеет решения в виде
[сходящегося] степенного ряда в форме у = Y2 спХп. Этот пример служит
предупреждением, что простая запись у = ^2 спхп содержит
предположение, которое может быть ложным. ■
Решим уравнение у" + у = 0.
Если мы ищем решение вида
оо
у = 5Zc^n'
71=0
мы найдем, что
оо оо
у' = ^2 пспх71'1 и у" = ]Р п(п - \)спхп~2.
71=1 П=2
Замена для у и у" в дифференциальном уравнении тогда приведет к
равенству
оо оо
J2 п(п ~ l)cnxn~2 + J2 спХп = 0.
п=2 п=0
Мы сдвигаем индекс суммирования в первой сумме на+2 (замените п — 2
на п = 0 и п на п 4- 2). Это дает
оо оо
]Г(п 4- 2)(п 4- 1)сп+2хп 4- ^ спхп = 0.
п=0 п=0
Решение
8.1. Введение и обзор теории степенных рядов 705
Теперь из принципа тождественности следует тождество (п 4- 2)(п +
+ 1)сп+2 4- сп = 0; таким образом, мы получили рекуррентную формулу
Св+Я = "(n+lKn + 2) B7)
для n ^ 0. Очевидно, что эта формула определяет коэффициенты сп
с четными индексами через с$ и коэффициенты с нечетными индексами
через ci; со и ci не предопределены и, таким образом, будут теми двумя
произвольными постоянными, которые, как мы ожидаем, должны входить
в общее решение уравнения второго порядка.
Когда мы поочередно применим рекуррентную формулу B7) для п =
= 0,2 и 4, мы получим
С2
г =
сз
со
~ 2!'
1,3 и 5,
Cl
~ 3!'
с4
со
4!
мы найдем.
съ
Cl
" 5!
и
Сб
,что
и
С7
=
=
со
6!
Cl
7!
Снова нам ясен образец; и мы просим вас показать (индукцией), что для
(-1L (~l)fcci
С2к = ~ЩГ и C2fc+1 = BfcTT)T-
Таким образом, мы получаем решение в виде степенного ряда
У(х)
Д X2 X4 X6 \ ( X3 X5 X7 \
= C41_2! + 4!-6!+---J+Clr~3! + 5!~7!+'"J;
иными словами, у(х) = cq cos x -f c\ sin x. Обратите внимание, что здесь
мы не имеем никакой проблемы с радиусом сходимости; ведь ряд Тейлора
для функций синус и косинус сходится для всех х. Ш
Решение примера 4 весьма поучительно и его стоит прокомментировать. Предположим,
что мы никогда не слышали о функциях синус и косинус, уже не говоря об их ряде Тейлора.
Мы тогда обнаружили бы два решения в виде степенных рядов
71=0 V '
*м-Е/^П5Г —ir + fr-" <29)
n=0 v 7
706 Глава 8. Методы степенных рядов
дифференциального уравнения у" + у = 0. Ясно, что С@) = 1 и что 5@) = 0. После
проверки, что два ряда в B8) и B9) сходятся для всех х, мы можем продифференцировать их
почленно и найти, что
C'(x) = -S{x) и S'(x) = C(x). C0)
Следовательно, С" @) = 0и5'@) = 1. Таким образом, с помощью метода степенных рядов
(все еще ничего не зная о функциях синус и косинус) мы обнаружили, что у = С(х) —
единственное решение уравнения
которое удовлетворяет начальным условиям у@) = 1 и у'@) = 0 и что у = S(x) является
единственным решением, которое удовлетворяет начальным условиям у@) = 0иу'@) = 1.
Из этого следует, что С(х) и S(x) линейно независимы, и — в признание важности
дифференциального уравнения у" 4- у = 0 — мы можем условиться называть С функцией косинус,
a S — функцией синус. Действительно, все обычные свойства этих двух функций могут
быть установлены исходя только из их начальных значений (в точке х = 0) и производных
в равенствах C0); нет никакой потребности обращаться к треугольникам или даже к углам.
(Сможете ли вы, используя только ряды в равенствах B8) и B9), показать, что [С(#)]2 4-
4- [£(#)]2 = 1 для всех xl) Это демонстрирует, что функции косинус и синус полностью
определены дифференциальным уравнением у" + у = 0, для которого они являются
естественными линейно независимыми решениями. На рис. 8.1.2 и 8.1.3 показан вид графиков
cos х и sin х и показаны графики полиномиальных приближений ряда Тейлора, которые мы
получаем, усекая бесконечный ряд в равенствах B8) и B9).
\у
л = 8 и=16 и = 24
n = 6 л=14 и = 22
Рис. 8.1.2. Полиномиальные приближения
ряда Тейлора для cos x
Эта ситуация ни в коем случае не является какой-либо необыкновенной или
исключительной. Многие важные специальные функции в математике появляются прежде всего как
решения дифференциальных уравнений в виде степенного ряда и, таким образом,
практически определяются посредством этого степенного ряда. В остальных разделах этой главы
мы увидим многочисленные примеры таких функций.
8.1. Введение и обзор теории степенных рядов 707
2
1
-1
-2
У
г ' U {
п = 5
1
\
п-1
w=13
/
1
/
к^
\
\
«=15
л = 21
/ у = sin х
\
\
■ г
1
п = 23
Рис. 8.1.3. Полиномиальные приближения
ряда Тейлора для sin x
В задачах 1-10 найдите решение данного дифференциального уравнения в виде степенного ряда.
Определите радиус сходимости полученного ряда и используйте ряды в равенствах E)-A2), чтобы
выразить решение, полученное в виде ряда, через знакомые элементарные функции. (Конечно,
никто не может запретить вам проверить полученное вами решение с помощью методов решения
уравнений из более ранних глав!)
1. у' = У
3. 2у' 4- Зу = 0
5. у' = х2у
7. Bх - 1)у' 4- 2г/ = 0
9. (х-1У + 22/ = 0
2. у' = 4у
4. у' 4- 2ху = 0
6. (х - 2)у' + у = 0
8. 2(х 4-1J/' = У
10. 2(я - 1J/' = Зу
В задачах 11-14 с помощью метода, использованного в примере 4, найдите два линейно
независимых решения данного дифференциального уравнения в виде степенного ряда. Определите радиус
сходимости каждого ряда и выразите общее решение, полученное в виде ряда, через знакомые
элементарные функции.
И. у" = у
13. у" + 9у =
:0
12. у" = 4г/
14. у"-\-у = х
Покажите (как в примере 3), что метод степенных рядов не позволяет найти решение в виде
степенного ряда вида у = ^2cnxri для дифференциальных уравнений, данных в задачах 15-18.
15. ху' 4- У = 0
17. х2у' 4- У = 0
16.
18.
2яу' = у
хъу' = 2у
В задачах 19-22 сначала получите рекуррентную формулу, дающую выражения сп для п > 2 через
со или с\ (или оба эти значения). Затем примените данные начальные условия, чтобы найти
значения со и с\. Затем определите сп (через п, как в тексте) и, наконец, выразите частное
решение через знакомые элементарные функции.
19. у" + 42/ = 0;у@) = 0,2/'@) = 3
20. у" - 4?/= 0; t/@) = 2,2/@) = 0
708 Глава 8. Методы степенных рядов
21. у" -2у' + у = 0; у@) = 0, у'@) = 1 22. у" + у' - 2у = 0; у@) = 1, у'@) = -2
23. Покажите, что уравнение
2 ft . 2 I . л
жу 4-я у 4-у = 0
не имеет ни одного решения в виде степенного ряда вида у — J2 СпХп.
24. Установите справедливость разложения в биномиальный ряд в равенстве A2). Для этого
выполните действия, указанные в следующих шагах, (а) Покажите, что у = A + х)а является
решением задачи Коши (задачи с начальными условиями) A 4- х)у' = ау9 у@) = 1. (Ь)
Покажите, что с помощью метода степенных рядов биномиальный ряд A2) получается в качестве
решения задачи Коши (задачи с начальными условиями), указанной в части (а), и что этот ряд
сходится, если \х\ < 1. (с) Объясните, почему справедливость разложения в биномиальный
ряд A2), следует из частей (а) и (Ь).
25. Для задачи Коши (задачи с начальными условиями)
У" = У+У, 2/@) = 0, уA) = 1
получите решение в виде степенного ряда
*«> = Е §«"•
где {Fn}^-0 — последовательность 0, 1, 1, 2, 3, 5, 8, 13, ... чисел Фибоначчи, определенных
равенствами Fq = 0, F\ = 1, Fn = Fn-2 4- Fn-i для п > 1.
26. (а) Покажите, что решение задачи Коши (задачи с начальными условиями)
у' = 1 + у2, у@) = 0
имеет вид у(х) = tgx. (b) Поскольку у(х) = tg# — нечетная функция, причем у'@) = 1, ее
ряд Тейлора имеет вид
у = х 4- сзх3 4- с$хь 4- C7X7 Ч .
Подставьте этот ряд в у' = 1 4- у2 и приравняйте коэффициенты при одинаковых степенях х.
Это позволит получить следующие соотношения:
Зсз = 1, 5с5 = 2сз,
7с7 = 2с5 + (сзJ, 9сэ = 2с74-2с3с5,
11сц =2с9 + 2сзС7 + (с5J.
(с) Выведите, что
tux — х Ч—ж Ч ж Ч ж
* 3 15 315
г# 4- т-зтггтгг-а; Ч- ■
2835 155925
27. Этот раздел показывает применение бесконечных рядов для решения дифференциальных
уравнений. Но и наоборот, дифференциальные уравнения могут иногда применяться для
суммирования бесконечных рядов. Рассмотрите, например, бесконечный ряд
1! 2! + 3! + 4! 5! + "' '
обратите внимание, что последовательность знаков 4- Ч Ь Ч— • • • наложена на слагаемые
ряда для числа е. Мы сможем вычислить этот ряд, если сумеем получить формулу для функции
/(х) = 1+«-1*» + 1в» + 1в*-1«» + ...,
8.2. Решения в виде ряда в окрестностях обыкновенных точек 709
потому что сумма рассматриваемого числового ряда просто равна /A). (а) Можно показать, что
данный здесь степенной ряд сходится для всех х и что его можно почленно дифференцировать.
Учитывая эти факты, покажите, что f(x) является решением задачи Коши (задачи с начальными
условиями)
2/C)=y; >@) = у'(о) = 1, г/"(о) = -1.
(Ь) Решите эту задачу Коши,(задачу с начальными условиями), чтобы показать, что
Подсказка содержится в задаче 48 из раздела 3.3. (с) Вычислите /A), чтобы найти сумму
данного здесь числового ряда.
8.2. Решения в виде ряда в окрестностях
обыкновенных точек
Метод степенных рядов, представленный в разделе 8.1, может быть применен к линейным
уравнениям любого порядка, но его самые важные приложения относятся к однородным
линейным дифференциальным уравнениям второго порядка вида
А(х)у" + В(х)у' + С(х)у = 0, (I)
где коэффициенты А, В и С—аналитические функции х. В действительности в большинстве
приложений эти коэффициенты-функции представляют собой просто многочлены.
В примере 3 из раздела 8.1 мы видели, что метод рядов не всегда приводит к решению
в виде ряда. Чтобы узнать, когда это действительно так, мы перепишем уравнение A) в форме
> ' y" + P(x)y' + Q(x)y = 0 B)
с ведущим коэффициентом 1, с Р = В/А и Q = С/А. Обратите внимание, что Р(х) и Q(x),
вообще говоря, не обязаны быть аналитическими в точках, где А(х) обращается в нуль.
Рассмотрим, например, уравнение
ху" + у' + ху = 0. C)
Коэффициентные функции в C) непрерывны всюду. Но в виде B) это уравнение выглядит
так:
|/" + -|/' + У = 0, D)
х
причем Р(х) = 1/х не аналитична в точке х = 0.
Точку х = а называют обыкновенной точкой уравнения B) (и эквивалентного
уравнения A)) при условии, что обе функции Р(х) и Q(x) аналитичны в точке х = а. В противном
случае х = а называется особой точкой. Таким образом, единственная особая точка
уравнений C) и D) — это х = 0. Вспомните, что частное аналитических функций является
аналитическим везде, где знаменатель отличен от нуля. Из этого следует, что если А(а) ^0
в уравнении A) с аналитическими коэффициентами, то х = а — обыкновенная точка. Если
А(х), В(х) и С(х) —многочлены без общих множителей, то х = а — обыкновенная точка
тогда и только тогда, когда А(а) ф 0.
710 Глава 8. Методы степенных рядов
Пример 1
Пример 2
Точка х = 0 — обыкновенная точка уравнения
ху" + (sin х)у' + ж2 г/ = 0,
несмотря на что, что А(х) = х обращается в нуль в точке х =* 0- Причина
состоит в том, что
п/ ч sinx 1 / х3 хъ \ ., х2 х4
Р(Х) = —= х^-¥+5!— j=1-3! + 5!--
является тем не менее аналитической функцией в точке х = 0, потому что
деление на х приводит к сходящемуся степенному ряду. ■
Точка х = 0 не является обыкновенной точкой уравнения
у" + х2у' + х1/2г/ = 0.
Причина состоит в том, что хотя Р (х) = х2 является аналитической
функцией в начале координат, Q (х) = х1/2 таковой не является. Причина этого
заключается в том, что функция Q(x) не дифференцируема в точке х = 0
и, следовательно, в этой точке не является аналитической. (Из теоремы 1
из раздела 8.1 следует, что аналитическая функция дифференцируема.) ■
Пример 3
Точка х = 0 — обыкновенная точка уравнения
A - х*)у" + Gх2 + ЗжбУ + (Ъх - ПхА)у = 0,
потому что коэффициентные функции А(х), В{х) и С(х) представляют
собой многочлены, причем А@) ^0. ■
Из теоремы 2 из раздела 3.1 следует, что уравнение B) имеет два линейно независимых
решения на любом открытом интервале, где непрерывны коэффициентные функции Р(х)
nQ(x). Основной факт для достижения нашей цели состоит в том, что в окрестности
обыкновенной точки а эти решения будут степенными рядами по степеням х — а. Доказательство
следующей теоремы может быть найдено в главе 3 книги Коддиштона (Coddington) An
Introduction to Ordinary Differential Equations (Englewood Cliffs, N.J.: Prentice Hall, 1961),
посвященной введению в обыкновенные дифференциальные уравнения.
Теорема 1
Решения в окрестности обыкновенной точки
Предположим, что а — обыкновенная точка уравнения
А(х)у" + В(х)у' + С(х)у = 0;
(I)
т. е. функции Р = В/А и Q = С/А являются аналитическими в точке х = а. Тогда
уравнение A) имеет два линейно независимых решения, причем каждое имеет вид
У(х) = ^сп(х-а)п.
E)
п=0
8.2. Решения в виде ряда в окрестностях обыкновенных точек 711
Радиус сходимости любого такого решения в виде ряда не меньше расстояйия от а до
самой близкой (вещественной или комплексной) особой точки уравнения A). Коэффициенты
в ряде E) могут быть определены его подстановкой в уравнение A). А
Пример 4
Определим нижнюю границу радиуса сходимости решения уравнения
(х2 + 9)у" + ху' + х2у = 0 F)
в виде ряда по степеням х, гарантируемую теоремой 1. То же самое
сделаем для ряда по степеням х — 4.
Решен ие Этот пример показывает, что необходимо принимать во внимание не
только вещественные особые точки, но и комплексные. Поскольку
Р(х)
х2+9
и Q(x) =
х2 + 9'
особыми точками уравнения F) будут только ±3г. Расстояние (на
комплексной плоскости) каждой из них от точки 0 равно 3, так что решение
в виде ряда вида Y1 спХп имеет радиус сходимости по крайней мере не
меньше, чем 3. Расстояние каждой особой точки от точки 4 равно 5, так
что решение в виде ряда вида ^2сп(х — 4)п имеет радиус сходимости по
крайней мере не меньше, чем 5 (рис. 8.2.1). ■
3i<
-3i<
У
\ 5
1 1 <
/
4N i
А
-
X
Рис. 8.2.1. Радиус сходимости как расстояние
до ближайшей особой точки
Пример 5
Найдем общее решение уравнения
(х2 - А)у" + Ъху' + у = О
G)
в виде ряда по степеням х. Затем найдем частное решение при у@) = 4,
1/@) = 1.
712 Глава 8. Методы степенных рядов
Решение Особыми точками уравнения G) являются только ±2, так что ряд будет
иметь радиус сходимости по крайней мере не меньший, чем 2.
Подстановка
оо оо оо
> ■ у = ^2 с"х"' у' = XI «сп^1 и у" = 5D n(n ~ 1)с"хП_2
п=0 п=1 п=2
в уравнение G) приводит к равенству
сю оо оо оо
У^ п(п - 1)спхп - 4 ^2 п(п ~ 1)спХп~2 + 3 ^2 пбпХп + ^2 СпХП = °*
п=2 п=2 п=1 п=0
Мы можем начать первую и третью сумму также с п = 0, потому что
никакие отличные от нуля слагаемые таким образом не добавятся. Мы
сдвигаем индекс суммирования во второй сумме на +2, заменяя п на
п + 2 и используя начальное значение п = 0. Это дает
оо оо оо оо
^n(n-l)cnzn-4^(n+2)(n^ =0.
п=0 п=0 п=0 п=0
После суммирования коэффициентов (в результате приведения
подобных) сп и сп+2 мы получаем равенство
оо
J2 [(™2 + 2п + 1)сп - 4(п + 2)(п + 1)сп+2] *п = 0.
п=0
Принцип тождественности дает соотношение
(п + 1Jсп - 4(гс + 2)(п + 1)сп+2 = 0,
что приводит к рекуррентной формуле
> c„+2 = (" + 1К (8)
п+2 4(n + 2) v '
для п ^ 0. При п = 0,2 и 4 мы поочередно получаем
со Зсг Зсо 5с4 3 • 5со
с2 = т-?;» с4 — ■;—т = ,о п—т и се =
4-2' * 4-4 42-2-4 ^ 4-6 43-2-4-б'
Продолжая этим способом, мы очевидно нашли бы, что
1-3-5--Bп-1)
°2п~ 4».2-4...Bn) ^
Используя обычное обозначение
Bn + l)!! = l-3-5---Bn + l)=B2"+n1,)!
8.2. Решения в виде ряда в окрестностях обыкновенных точек 713
и наблюдение, что 2 • 4 • 6 • • • Bгг) = 2П • п\, мы, наконец, получаем
Bп - 1)!!
(Мы также использовали то, что 4П • 2П = 23п.)
При п = 1,3 и 5 из уравнения (8) мы получаем
2ci 4сз 2 • 4ci 6C5 2 • 4 • 6ci
С3 = -—г, Сб = -—Г = ,9 0—- И С7
43' ° 45 42-3-5 ' 4.7 43-35-7*
Очевидно, что общая формула имеет вид
2-4-6---Bп) п\
C2n+1 = 4".1.3.5...Bn+l)Cl = 2-.Bn + l)!!Cl' A0)
Формула(9) выражает коэффициенты с четными индексами через со;
формула A0) выражает коэффициенты с нечетными индексами через с\.
После того как мы отдельно соберем члены ряда при четных и нечетных
степенях, мы получим общее решение
Иными словами,
+Ci(x+r3+hx5+wox7+-)- A1'}
Поскольку у@) = соИ2/'@) = с\9 данные начальные условия
выполняются, лишь если со = 4 и с\ = 1. Подставляя эти значения в уравнение A1/)»
получим первые несколько членов частного решения, удовлетворяющего
условиям у @) = 4и?/'@) = 1:
113 1
у(х) = 4 + х + -х2 + -х3 -\ х4 Н ж5 Н . A2)
УК } 2 6 32 30
Замечание. Какивпримере 5, подстановка?/ = XI сп#п в линейное уравнение второго
порядка, для которого х = 0 является обыкновенной точкой, обычно приводит к
рекуррентной формуле, которая может использоваться для того, чтобы последовательно выразить
каждый из коэффициентов С2, сз, с^,... через первые два, со и с\. В этом случае два линейно
независимых решения получаются следующим образом. Пусть уо(х) — решение,
полученное при со = 1 и с\ = 0, а у\ (х) — решение, полученное при со = 0 и с\ = 1. Тогда
1Л>@) = 1, У^@) = 0 и i/i@) = 0, i/i@) = l,
так что ясно, что уо и ?/i являются линейно независимыми. В примере 5 уо{х) и у\{х)
определены двумя рядами, которые появляются в правой части равенства A1), которое
выражает общее решение в виде у = соуо + с± у\. ■
714 Глава 8. Методы степенных рядов
Решения в виде ряда Тейлора
Если бы в примере 5 мы искали частное решение с данными начальными значениями у (а)
и у'(а), нам понадобилось бы общее решение в виде
2/(х) = ]Рсп(ж-а)п;
A3)
п=0
т. е. ряд по степеням х — а, а не по степеням х. Дело в том, что только для решений вида A3)
начальные условия
у(а) = со й у'(а) = сг
определяют произвольные постоянные со и с\ через начальные значения у и у'.
Следовательно, чтобы решить задачу Коши (задачу с начальными условиями), нужно найти разложение
в ряд общего решения, причем центр ряда должен быть в той точке, в которой заданы
начальные условия.
Пример б
Решим задачу Коши (задачу с начальными условиями)
(*2-2*-3)§+3(*-l)$+y = 0; y(l)=4, у'A) = -1. A4)
Решение Нам нужно найти общее решение в виде ^ cn(t — 1)п. Но вместо того
чтобы подставлять этот ряд в A4) и затем определять коэффициенты, мы
упростим вычисления, если сначала пойставим % = t — 1, чтобы в конце
концов искать ряд вида YlcnXn . Чтобы преобразовать уравнение A4)
в уравнение с новой независимой переменной х, мы обращаем внимание
на то, что
t2 - 2t - 3 = (х + IJ - 2(а;,+ .1) - 3 = х2 - 4,
dy _ dy dx _ dy _^ ,
dt dx dt dx
fy
dt2
d_
dx
(!)]!-=<*-»••
где штрихи обозначают дифференцирование по х. Следовательно, мы
преобразуем уравнение A4) к виду
(х2 - 4)у" + Зху' + у = О
с начальными условиями у = 4 и у1 = 1 в точке х = 0 (соответствующей
t = 1). Это—задача Коши (задача с начальными условиями), которую мы
решили в примере 5, так что нам уже известно частное решение A2). Мы
подставляем t — 1 вместо х в уравнение A2) и таким образом получаем
8.2. Решения в виде ряда в окрестностях обыкновенных точек 715
искомое частное решение
y(t) = 4 + (*-l) + i(t-lJ + i(*-lK +
Этот ряд сходится, если — 1 < t < 3. (Почему?) Ряд такого вида может
использоваться для вычисления числовых значений решения. Например,
у@,8) = 4 + (-0,2) + ^(-0,2J + |(-0,2K +
+ ЙН),2L + ^(-0,2)* + ...,
так что 2/@,8) « 3,8188. ■
Последнее вычисление в примере 6 иллюстрирует факт, что решения
дифференциальных уравнений в виде ряда полезны не только для того, чтобы установить общие свойства
решения, но также и для числовых вычислений, когда неизвестно вьфажение решения через
элементарные функции. '
Типы рекуррентных соотношении и формул
Формула (равенство) (8) представляет собой пример рекуррентной формулы с двумя
членами; она выражает каждый коэффициент ряда через один из предыдущих коэффициентов.
Рекуррентная формула со многими членами выражает каждый коэффициент ряда через
два или больше предьщущих коэффициентов. В случае рекуррентной формулы со многими
членами, обычно неудобно или даже вообще невозможно найти формулу, которая
выражает общий коэффициент сп через п. Следующий пример показывает, что мы иногда можем
сделать с рекуррентной формулой с тремя членами.
Пример 7
Найдем два линейно независимых решения уравнения
у"-ху'-х2у = 0. A5)
Решение Как обычно, мы поставляем степенной ряд у — Y2 спхп. Это приводит
к уравнению
оо оо оо
Y^ n(n - 1)спхп~2 - ^ пспхп - ^ СпХп+2 = 0.
п=2 п=1 п=0
Мы можем начать вторую сумму с п = 0, ничего другого не изменяя
вообще. Чтобы каждый член, содержащий хп, вошел в общий член ряда,
мы сдвигаем индекс суммирования в первой сумме на +2 (заменяем п на
п + 2), а также сдвигаем индекс на —2 в третьей сумме (заменяем п на
п — 2). Эти сдвиги приводят к равенству
оо сю оо
J2(n + 2)(п + 1)сп+2хп - J2пспхп - Y Сп-2Хп = 0.
п=0 п=0 п=2
716
Глава 8. Методы степенных рядов
Общий диапазон этих трех сумм — га ^ 2, так что мы должны отделить
слагаемые, соответствующие га = 0ига = 1в первых двух суммах перед
суммированием коэффициентов (приведении подобных) при хп. Это дает
равенство
ч СЮ
2с2 + 6с3х - с\х + Y^ [(га + 2)(га + 1)сп+2 - псп - сп_2] хп = 0.
п=2
Из принципа тождественности теперь следует, что 2с2 = 0,чтосз = \с\9
и рекуррентная формула с тремя слагаемыми:
ПСп+Сп-2
Сп+2 = (п + 2)(п + 1) A6)
для га ^ 2. В частности,
_ 2с2 + ср _ Зс3 + с\ _ 4с4 + с2
С4 " 12 ' °5 ~ 20 ' Сб~ 30 '
5с5 + с3 бсб + с4
С7 = 7Z > С8 =
A7)
42 ' ° 56
Таким образом, все значения сп для га ^ 4 выражаются через
произвольные постоянные со и ci, потому что с2 = 0 и сз = \с\.
Чтобы получить наше первое решение у\ уравнения A5), мы выбираем
со = 1 и с\ = 0, так что с2 = сз = 0. Тогда из формулы A7) находим
1 л 1 л 3
С4 = 777? С5 = 0? с6 = 7^5 <?7 = 0, Cg
12' * ' °~ 90' w~w\ °" П20'
таким образом,
ш(х) = 1 + ^ + ^ + 115х« + -. A8)
Поскольку с\ — сз = 0, из уравнения A6) видно, что этот ряд содержит
только члены при четных степенях.
Чтобы получить второе линейно независимое решение 2/2
уравнения A5), мы полагаем со = 0 и с\ = 1, так что с2 = 0 и сз = |. Тогда из
формулы A7) находим
С4 = 0, с5 = ±, се = 0, с7 = ^,
так что
у^=х+г3+1х5 + шх7+---- A9)
Поскольку со = с2 = 0, из уравнения A6) видно, что этот ряд содержит
только члены при нечетных степенях. Решения у±(х) и 2/2 (#) линейно
независимы, потому что у\@) = 1 и у[@) = 0, тогда как 2/2@) = 0
и 2/2@) = 1. Общее решение уравнения A5) представляет собой
линейную комбинацию степенных рядов в A8) и A9). Уравнение A5) не имеет
никаких особых точек, так что степенные ряды, представляющие у\ (х)
и 2/2 (х), сходятся для всех х. Ш
8.2. Решения в виде ряда в окрестностях обыкновенных точек 717
Уравнение Лежандра
Уравнение Лежандра порядка а представляет собой линейное дифференциальное
уравнение второго порядка; оно имеет вид
> A - х2)у" - 2ху' + а(а + 1)у = О, B0)
где вещественное число а удовлетворяет неравенству а > — 1. Это дифференциальное
уравнение имеет обширные приложения, начиная от формул численного интегрирования (типа
гауссовой квадратуры) и до задачи определения установившейся температуры в твердом
сферическом теле, когда известно распределение температур в точках его границы.
Единственные особые точки уравнения Лежандра — это +1 и — 1, так что оно имеет два линейно
независимых решения, которые могут быть выражены как степенные ряды по степеням х
с радиусом сходимости по крайней мере не меньшим, чем 1. Подстановка у = ^2стхт
в уравнение B0) приводит (см. задачу 31) к рекуррентной формуле
(g-m)(g + m+l)^
> Ст+2 = т ГТТ7 Г^\—°™ B1)
(m + l)(m + 2)
для га ^ 0. Мы обозначаем через т индекс суммирования, потому что для п мы отводим
другую роль.
Считая произвольные постоянные со и с\ заданными, из равенства B1) находим
а(а 4-1)
32 = 2! °°9
(а-1)(а + 2)
сз = з! Сь
а(а-2)(а + 1)(а + 3)
С4 = J, Со,
_(а-1)(а-3)(а + 2)(а + 4)
сь- 5! сь
Мы можем легко показать, что для m > 0,
l4TOa(a-2)(a-4)---(a-2m + 2)(g + l)(a + 3)---(a + 2m-l)^
C2m = (-l) ^ С° B2)
и
iVn(d-l)(a-3)---(a-2m + l)(c* + 2)(a + 4)--> + 2m)
<w = (-i) j^Tr)\ Cl- <23)
Иными словами,
С2т = (-1)тО>2тС0 И C2m+1 = (-l)ma2m+lCl,
где а,2т и а2т+1 обозначают дроби в уравнениях B2) и B3) соответственно. Используя эти
обозначения, для уравнения Лежандра порядка а мы получаем два линейно независимых
решения в виде рядов
оо оо
2/i(*)=co£(-l)m<W2m и 2/2(х) = с1^(-1Га2т+1х2+1. B4)
т—0 т=0
718 Глава 8. Методы степенных рядов
Теперь предположим, что а есть неотрицательное целое число: а = п> Если число а ==
= п является четным, то из уравнения B2) следует, что а,2т — 0, когда 2га > п. В этом
случае уг(х) —многочлен степени п ил/2 — бесконечный (действительно бесконечный!)
ряд. Если а = п — нечетное положительное целое число, то из уравнения B3) мы видим,
что a2m+i = 0, когда 2га + 1 > п. В этом случае у2 (х) — многочлен степени п и у\ —
бесконечный (действительно бесконечный!) ряд. Таким образом, в любом случае одно из
этих двух решений в B4) представляет собой многочлен, а другое — бесконечный ряд.
При соответствующем выборе (сделанном отдельно для каждого п) произвольных
постоянных со (при четном п) или с\ (при п нечетном), решение уравнения Лежандра
A - хJу" - 2xij! + п(п + 1)у = О,
B5)
порядка п в виде многочлена степени п обозначается через Рп (х) и называется многочленом
Лежандра степени п. Общепринято (по причине, указанной в задаче 32) выбирать
произвольную постоянную так, чтобы коэффициент при хп в Рп(х) был равен Bп)!/ [2п(га!J].
Тогда оказывается, что
N
(-l)fcBn-2fc)!
~ ^ 2nfc! (n " fc)! (n - 2fc)!
-2k
B6)
где N = [rc/2] — целая часть n/2. Вот первые шесть многочленов Лежандра:
Po(x) = l, Pi(x)=x,
Р2(х) = -(Зх2-1),<
Р3(х) = -Eх3
■За;),
Р4(х) = ^C5х4 - ЗОж2 + 3), Р5(х) = 1F3х5 - 70х3 + 15а:);
О О
их графики показаны на рис. 8.2.2.
Рис. 8.2.2. Графики у = Рп(х)
многочленов Лежандра для п = 1, 2, 3, 4 и 5.
Графики отличает то, что все п нулей многочлена
Рп (х) лежат в интервале— 1 < х < 1
8.2. Решения в виде ряда в окрестностях обыкновенных точек 719
8.2. Задачи
В задачах 1-15 найдите общие решения (в виде ряда по степеням х) данных
дифференциальных уравнений. Выведите рекуррентную формулу и найдите гарантируемый радиус сходимости
в каждом случае.
1. (х2 - 1)у" + 4ху' + 2у = 0 2. (х2 + 2)у" + 4ху' + 2у = О
3. у" + V + у = 0 4. (ж2 + 1)у" + бжу' + 4у = О
5. (ж2 - 3)у" + 2жу' = 0 6. (ж2 - 1)у" - бжу' + 12у = О
7. (ж2 + 3)у" - 1ху' + 16у = О 8. B - х2)уп - ху' + 16у = О
9. (х2 - 1)у" + Sxyf + 12у =- О 10. Зу" + жу' - 4у = О
11. 5у" - 2xyf + 10у = 0 12. у" - жУ - Зху = О
13. у" + ж2у' + 2жу = 0 14. у" + ху = 0 (уравнение Эйри)
15. у" + ж2у = 0
5 задачах 16 и 17 с помощью степенных рядов найдите решения задачи Коши (задачи с начальными
условиями).
16. A + х2)у" + 2ху' - 2у = 0; у@) = 0, у'@) = 1
17. у'' + ху' - 2у = 0; у@) = 1, у'@) = О
В задачах 18-22 найдите решения данных задач Коши (задач с начальными условиями). Сначала
сделайте подстаноку вида t — х — а, а затем найдите решение ]Г^ Cntn преобразованного
дифференциального уравнения. Найдите интервал значений х, для которого теорема 1 из этого раздела
гарантирует сходимость.
18. у" + (х - 1)у' + у = 0; уA) = 2, у'A) = О
19. Bх - х2)уИ - 6(х - 1)у' - 4у = 0; уA) = 0, у'A) = 1
20. (х2 - 6х + 10)у" - 4(ж - 3)у' + 6у = 0; уC) = 2, у'C) = О
21. Dж2 + 16* + 17)у" = 8у; у(-2) = 1, у'(-2) = О
22. (х2 + 6ж)у" + (Зж + 9)у' - Зу = 0; у(-3) = 0, у'(-З) = 2
5 задачах 23-26 найдите рекуррентную формулу с тремя членами для решений вида у = Y1 СпХп.
Затем найдите первые три отличных от нуля члена в каждом из двух линейно независимых
решений.
23. у" + A + х)у = 0 24. (х2 - 1)у" + 2xyf + 2ху = О
25. у" + ж2у' + х2у = 0 26. A + хъ)у" + ж4у = О
27. Решите задачу Коши (задачу с начальными условиями)
у" + ху' + Bж2 + 1)у = 0; у@) = 1, у'@) = -1.
Найдите достаточно много членов для того, чтобы вычислить уA/2) с точностью до четырех
десятичных знаков.
В задачах 28-30 найдите первые три отличных от нуля члена в каждом из двух линейно
независимых решений вида у = $_ СпХп. Подставьте известные ряды Тейлора аналитических функций
и сохраните достаточно много членов для того, чтобы вычислить необходимые коэффициенты.
28. у" + е~ху = О 29. (cos х)у" + у = О
30. ху" + (sin х)у' + ху = О
720 Глава 8. Методы степенных рядов
31. Выведите рекуррентную формулу B1) для уравнения Лежандра.
32. Следуя шагам, кратко намеченным в этой задаче, установите формулу Родрига
для многочлена Лежандра степени п. (а) Покажите, что v = (х2 — 1)п удовлетворяет
дифференциальному уравнению
A - x2)v + 2nxv = 0.
Продифференцируйте каждую часть этого уравнения и получите
A - x2)v" + 2(n - l)xv + 2га; = 0.
(Ь) Последовательно п раз продифференцируйте каждую часть последнего уравнения и
получите
A - x2)v(n+2) - 2xv(n+1) + п(п + 1)^(п) = 0.
Таким образом, функция и = v^ = Dn(x2 — 1)п удовлетворяет уравнению Лежандра порядка
п. (с) Покажите, что коэффициент при хп в и равен Bп)\/п\; затем установите, почему это
доказывает формулу Родрига. (Обратите внимание, что коэффициент при хп в Рп{х) равен
Bп)!/[2"(п!J].)
33. Уравнение Эрмита порядка а имеет вид
у" — 2ху + 2ау = 0.
(а) Найдите два решения в виде степенного ряда
»=!+£: нг2"ф-2а"ат+2)'>"
Ю.1= 1 ^ '
„ _r,V( IV" 2m(Q ~ 1)(Q - 3) •••(«- 2т + 1) 2ст+1
У2-х+2^( 1) Bт+ 1)! *
га=1 v '
Покажите, что yi — многочлен, если а — четное целое число, тогда как у2 — многочлен,
если а является нечетным целым числом. (Ь) Многочлен Эрмита степени п обозначается
через Нп(х). Это — решение в виде многочлена степени п уравнения Эрмита, умноженное
на подходящую константу (такую, что коэффициент при хп равен 2П). Покажите, что первые
шесть многочленов Эрмита имеют вид
Я0(ж) = 1, Я1(ж) = 2ж,
Н2(х) = 4ж2 - 2, Н3(х) = 8х3 - 12ж,
Я4(ж) = 16ж4 - 48ж2 + 12, Яб(ж) = 32ж5 - 160ж3 + 120ж.
Общая формула для многочленов Эрмита имеет вид
х2 dU / _ж2>
н^=^Пех2Ые~х1-
Проверьте, что эта формула действительно фактически дает многочлен степени п. Весьма
интересно с помощью системы компьютерной алгебры проверить догадку о том, что (для
каждого п) нули многочленов Эрмита Нп(х) и Яп+1 "разделяют друг друга", — т.е. что п
нулей многочлена Яп лежат в п ограниченных открытых интервалах, конечные точки которых
представляют собой пары последовательных нулей многочлена Яп+ь
8.2. Решения в виде ряда в окрестностях обыкновенных точек 721
34. После примера 4 в разделе 8.1 обсуждалось предположение, что дифференциальное уравнение
у"+у = 0 может использоваться для того, чтобы ввести и определить знакомые функции синус
и косинус. Подобным способом уравнение Эйри
У
ху
служит для того, чтобы ввести две новые специальные функции, которые часто появляются
в приложениях — от вычисления распространения радиоволн до молекулярных колебаний.
Получите первые три или четыре члена двух различных решений уравнения Эйри в виде
степенного ряда. Затем проверьте, что ваши результаты совпадают с формулами
' ч °° 1
у1(х) = 1 + 53 —
(ЗА;)!
Cfc ~ 2) х3к
y2(x) = x + Y^
2-5-
k=i
Cfc+l)!
Cfe - 1) хзм-1
для решений, которые удовлетворяют начальным условиям yi@) = 1, у[@) = О и г/г@) = 0,
у'ч @) = 1 соответственно. Специальные комбинации
Ai(
х)= ?<*>
У2(Х)
32/3Г(|) 31/ЗЩ)
Bi(x) =
yi(a?)
+
У2 (X)
3-Ver(I)
определяют стандартные функции Эйри, которые появляются в математических таблицах и
системах компьютерной алгебры. Их графики, показанные на рис. 8.2.3, при х < 0,
демонстрируют колебательное поведение, подобное тому, которое задается тригонометрическими
функциями, однако при х —► +оо функция М(х) уменьшается экспоненциально, а функция Bi(x)
экспоненциально увеличивается. Весьма интересно с помощью системы компьютерной
алгебры исследовать, сколько членов нужно сохранить в рядах для yi и г/2, чтобы вычертить рисунок,
который визуально неотличим от рис. 8.2.3 (для вычерчивания этого рисунка использовались
аппроксимацияи высокой точности к функциям Эйри).
'
l\/\jl\h
1 - V / *. i / '. V /
\л/ * л/ чА/
\д
*f / * \
J
1
y^^bj
-0.5
/в1(х)
,Щх)
Рис. 8.2.3. Графики функций Эйри у = Ai(x)
и у = Bi(x)
722 Глава 8. Методы степенных радов
8.2. Приложение. Автоматическое вычисление
коэффициентов ряда
Повторное применение рекуррентной формулы для того, чтобы последовательно вычислять
коэффициенты, особенно в случае рекуррентной формулы с тремя или большим числом
членов, — утомительный и даже мучительный процесс, связанный с методами вычисления
сумм бесконечных рядов. Здесь мы иллюстрируем использование системы компьютерной
алгебры для решения этой задачи. В примере 7 мы видели, что коэффициенты решения
дифференциального уравнения у" — ху' — х2у = 0 в виде ряда у — Y1 сп%п выражаются
через два произвольных коэффициента со и с\ по формулам
б (п + 2)(п + 1)
Казалось бы, нет ничего сложного в том, чтобы использовать такую рекуррентную формулу,
ведь вычисления по ней можно провести по самой рутинной программе. Но неожиданный
подвох возникает из-за того, что типичный массив в компьютерной системе индексируется
индексами 1, 2, 3, ..., а не индексами 0, 1, 2, ... которые равны показателям степени
в последовательных членах степенного ряда, который начинается с постоянного члена. По
этой причине мы сначала перепишем наше предложенное решение в виде степенного ряда
вида
п=0 п=1
где Ьп = cn_i для каждого п ^ 1. Тогда из первых двух условий в A) следует, что &з = О
и &4 = \Ь2\ кроме того, рекуррентная формула (с п, замененным на п — 1) приводит к новой
рекуррентной формуле
(n-l)cn_i+cn^3 (п - 1)ЬП + bn-2 ,-v
&п+2 = Cn+i = z —-г — -. —г . \$)
(п + 1)п п[п 4-1)
Теперь мы готовы начать. Предположим, что мы хотим вычислить члены до 10-й степени
в B) при начальных условиях 61=62 = 1- Тогда команды системы компьютерной алгебры
Maple
к := 11: # к членов
b := # массив
arrayA..к):
Ь[1] := 1:
Ь[2]
Ь[3]
Ь[4
1
0
Ь[2]/б
# произвольно
# произвольно
for n from 3 by l to к - 2 do # для n = 3 шаг 1 до к
b[n+2] := ((n-l)*b[n] + b[n-2])/(n*(n+l));
nri:
8.2. Решения в виде ряда в окрестностях обыкновенных точек 723
или команды системы компьютерной алгебры Mathematica
к = 11; (* к членов *)
b = Table[0, {п,1,к}]; (* таблица *)
Ь[[1]] = 1; (* произвольно *)
Ь[[2]] = 1; (* произвольно *)
Ь[[3]] = 0;
Ь[[4]] = Ь[[2]]/б;
For[n=3, п<=к-2, (* для п = 3 шаг 1 до к - 2 выполнить *)
b[[n+2]]=((n-l)*b[[n]] + b[[n-2]])/(n*(n+l)); n=n+l];
позволят быстро вычислить коэффициенты {Ьп} в решении
,3 „4 о^б ^6 iq.,7 q^.8 llQ^.9 /М-Ю
ЯГ X
3x5 x6 13x7 Зх8 119х9 Alx1
y(x) _! + *+- + - + — + _ + __ + _ + ^^ + __ + ... . D)
Вы могли обратить вцимание, что члены с четными и нечетными степенями здесь совпадают
с указанными в уравнениях A8) и A9) соответственно (пример 7).
Команды пакета Matlab
к = 11; % к членов
b = 0*A:к); % массив
ЬA) = 1; % произвольно
ЬB) = 1; % произвольно
ЬC) = 0;
ЬD) = ЬB)/б;
for n = 3:к-2 % для п = 3 шаг 1 до к - 2 выполнить
b(n+2) = ((n-l)*b(n) + b(n-2))/(n*(n+l));
end % конец
format rat, b % форматирование
дадут те же самые результаты, за исключением того, что коэффициент Ью при х9 будет
отображаться как 73/31801, вместо дравильного значения 119/51840, приведенного в
уравнении D). Это случается потому, что
73 ч 119
——- « 0,0022955253 в то время как —— « 0,0022955247,
31801 F 51840
так что эти две рациональные дроби совпадают после округления до девяти десятичных
знаков. Объясняется это тем, что (в отличие от систем Mathematica и Maple) вычисления внутри
пакета Matlab ведутся в десятичной, а не в точной арифметике. Но в конце этого алгоритма
команда форматирования format rat конвертирует (преобразовывает) правильную
аппроксимацию с 14 знаками для Ью в неправильную, приближая ее рациональной дробью,
которая "хороша, но не совсем".
Вы можете подставить Ь\ = 1, Ъъ = 0 и Ъ\ = 0, &2 = 1 отдельно (а не Ь\ = &2 = 1)
в командах, показанных здесь, чтобы получить частичные суммы двух линейно
независимых решений, указанных в уравнениях A8) и A9) из примера 7. Эта методика может быть
применена к любому примеру и любой задаче в этом разделе.
724 Глава 8. Методы степенных рядов
8.3. Регулярные особые точки
Мы теперь приступим к исследованию решения однородного уравнения второго порядка
> А(х)у" + В(х)у' + С(х)у = 0 (I)
в окрестности особой точки. Как вы помните, если функции А,ВиС представляют собой
многочлены, не имеющие никаких общих множителей, то особые точки уравнения A) — это
просто те точки, где А(х) — 0. Например, х = 0 — единственная особая точка уравнения
Бесселя порядка п
х2у" + ху' + (х2 - п2)у = 0,
тогда как уравнение Лежандра порядка п
A - х2)у" - 2ху' + п(п + 1)у = 0
имеет следующие две особые точки: х = — 1 и х = 1. Оказывается, что некоторые из
особенностей решений таких уравнений очень важны для приложений и в значительной
степени определяются их поведением в окрестности их особых точек.
Мы ограничим наше внимание случаем, в котором х = 0 является особой точкой
уравнения A). Дифференциальное уравнение, имеющее х = а в качестве особой точки, легко
преобразуется заменой t = х — *а в такое, у которого соответствующая особая точка
находится в 0. Например, давайте подставим t = х — 1 в уравнение Лежандра порядка п.
Поскольку
, _ dy _ dy dt _ dy
dx dt dx dt'
У dx2
\±(*y\
[dt \dxj
и 1 — x2 = 1 — (t -f lJ = —2t — t2, мы получаем уравнение
dt _ d2y
dx dt2
-t{t + 2)^| - 2(t + 1)^ + n(n + 1J/ = 0.
Это новое уравнение имеет особую точку t = 0, соответствующую х = 1 в первоначальном
уравнении; оно имеет также особую точку t = —2, соответствующую х = — 1.
Типы особых точек
Дифференциальное уравнение, для которого 0 является особой точкой, обычно не будет
иметь решений в виде степенного ряда вида у(х) = ]Г) спхп9 так что прямой метод
раздела 8.2 терпит неудачу в этом случае. Чтобы исследовать форму, которую, возможно, имеет
решение такого уравнения, мы предполагаем, что уравнение A) имеет аналитические
коэффициентные функции и переписываем его в стандартной форме
>. ' y" + P{x)y' + Q{x)y = b, B)
где Р = В/А и Q = С/А. Вспомните, что х = 0 — обыкновенная точка (в
противоположность особой точке) уравнения B), если функции Р(х) и Q(x) являются аналитическими
8.3. Регулярные особые точки 725
в точке х = 0; т. е. если Р(х) и Q(x) имеют сходящиеся разложения в степенной ряд по
степеням х на некотором открытом интервале, содержащем х = 0. Теперь может быть
доказано, что каждая из функций Р{х) и Q{x) либо является аналитической,либо приближается
к ±оо при х —» 0. Следовательно, х — 0 — особая точка уравнения B) при условии, что
Р{х) или Q{x) (или обе) приближаются к ±оо при х —* 0. Например, если мы перепишем
уравнение Бесселя порядка п в форме
*•+:• + ('-£)»-*
мы увидим, что обе функции Р{х) = l/xnQ(x) = 1 — (п/хJ стремятся к бесконечности
при х —» 0.
Мы увидим теперь, что метод степенных рядов может быть обобщен так, чтобы он
будет применимым в окрестности особой точки х — 0 уравнения B) при условии, что Р(х)
стремится к бесконечности не более быстро, чем 1/х, nQ(x) — не более быстро, чем 1/х2
при х —> 0. Это означает, что Р{х) и Q{x) имеют только "слабые" особенности в точке х = 0.
Чтобы установить это более точно, мы перепишем уравнение B) в форме
у„ + РМу, + яМу = 0^ C)
X X*
где
> р(х) = хР(х) и q(x) = х2<2(я). D)
Определение. Регулярная особая точка
Особая точка х = 0 уравнения C) называется регулярной особой точкой, если обе
функции р(х) и q(x) являются аналитическими в точке х = 0. В противном случае
особая точка называется иррегулярной (нерегулярной) особой точкой.
В частности, особая точка х = 0 будет регулярной особой точкой, если обе функции р(х)
и q(x) являются многочленами. Например, мы увидим, что х = 0—регулярная особая точка
уравнения Бесселя порядка п, если запишем это уравнение в форме
„ 1 , х2 - п2
У" 4- -У + 1Г-У = 0
X Хг
и заметим, что оба коэффициента р{х) = 1 и q(x) = х2 — п2 — многочлены от ж,
В отличие от этого, рассмотрим уравнение
2zy + (i + ^)z/ + 3zt/ = 0,
которое имеет особую точку х = 0. Если мы запишем это уравнение в форме C), мы получим
уравнение
A + xVM I
Поскольку
■'14- ж 1 1
р(х) = -2^=2^+2^°°
726 Глава 8. Методы степенных рядов
при х —► 0, мы видим, что х = 0 — иррегулярная (нерегулярная) особая точка, хотя q(x) = §
представляет собой многочлен. Мы не будем обсуждать решение дифференциальных
уравнений в окрестности иррегулярных (нерегулярных) особых точек; это значительно более
сложная тема, чем поиск решений дифференциальных уравнений в окрестности
регулярных особых точек.
Пример 1
Рассмотрим дифференциальное уравнение
х2A + х)у" + хD - x2)yf + B + Зх)у = 0.
В стандартной форме у" + Ру' -f Qt/ = 0 оно имеет вид
„ 4-х2 , 2 + Зх
27 ^хТГТ^^^м^)^0-
Поскольку оба коэффициента
Р(Х) = /1 , ч И <2w
хA + х) w х2A+х)
стремятся к оо при х —► 0, мы видим, что х = 0 — особая точка.
Чтобы определить характер (природу) этой особой точки, мы запишем это
дифференциальное уравнение в форме уравнения C):
у„ + D-х^)/A + х)/ + B + to)/(l + »)y = Q
Таким образом,
, ч тс X , ^ Zi -Г" ОХ
р(х> = ТТ^Г и ^W = -ТГ7'
1 Н-х 1 + х
Поскольку частное многочленов представляет собой аналитическую
функцию везде, где знаменатель отличен от нуля, мы видим, что оба
коэффициента р(х) и q(x) являются аналитическими функциями в точке
х = 0. Следовательно, х = 0 —регулярная особая точка данного
дифференциального уравнения. ■
Может случиться так, что после того, как дифференциальное уравнение, первоначально
заданное в общей форме уравнения A), мы перепишем в форме C), функции р(х) и q(x)9
определенные равенствами D), окажутся не определенными в точке х = 0. В этом случае
ситуация определяется пределами
Ро = р@) = Hm p(x) = lim хР(х) E)
х—►() х—►()
Чо = <?@) = Hm q{x) = lim x2Q(x). F)
x—>0 x-+0
Еслиро = 0 = go j то точках = 0 может оказаться обыкновенной точкой. Если же это не так,
но пределы в E) и F) все же существуют и конечны, то х = 0—регулярная особая точка. Если
8.3. Регулярные особые точки 727
же хотя бы один из этих пределов не существует или бесконечен, то ж = 0 — иррегулярная
(нерегулярная) особая точка.
Замечание. В приложениях, если дифференциальное уравнение записано в форме
Р(х) i , я(х)
У" +
-у' +
4/ = о,
C)
то в большинстве случаев функции р(х) и q(x) являются многочленами. В этом случае ро =
= р@) и go = q@)—просто постоянные слагаемые, являющиеся свободными членами этих
многочленов, так что нет никакой потребности вычислять пределы в равенствах E) и F). ■
Пример 2
Чтобы исследовать характер (природу) точки х = 0 для
дифференциального уравнения
хАу" + (х2 sin ж)?/ + A — cosx)y = 0,
мы сначала запишем его в форме C):
(sinж)/ж , A —созж)/ж2
!/" + ■
-у' + -
■у = о.
Тогда правило Лопиталя дает значения
» _. sin ж .. cos ж
Ро = lim = lim —:— = 1
х—►() ж
ж->0 1
1 — COS Ж .. 81ПЖ 1
an = lim = lim ~-— = ~
чи х-+о ж2 х-*о 2ж 2
для пределов E) и F). Поскольку оба предела не равны нулю, мы видим,
что ж = 0—регулярная особая точка, потому что каждый предел конечен.
Иными словами, мы могли написать
к
ч sin ж 1 / ж3 ж5 \ . ж2 ж4
q{x) =
COSX
(
ж2 ж4 ж6
^t + ir
б!
)
__ 1 ж2 ж4
" 2! ~¥ + ¥"
Эти (сходящиеся) ряды явно показывают, чтор(х) и q(x) являются
аналитическими функциями, и, более того, чторо = р@) = 1 и qo — q@) = |.
728 Глава 8. Методы степенных рядов
Метод Фробениуса
Мы теперь приближаемся к задаче фактического нахождения решений линейного
дифференциального уравнения второго порядка в окрестности регулярной особой точки х = 0.
Самое простое такое уравнение представляет собой разноразмерное уравнение с
постоянными коэффициентами
х2у" + Poxy' + qoy = 0, G)
к которому сводится уравнение C) тогда, когда р(х) = ро и q(x) =qo — константы. В этом
случае мы можем прямой подстановкой проверить, что простая степенная функция у (х) =
= хг является решением уравнения G) тогда и только тогда, когда г — корень квадратного
уравнения1
г(г - 1) + р0г+ <7о = 0. (8)
В общем случае, в котором р(х) и q(x) являются степенными рядами, а не константами,
разумно предположить, что наше дифференциальное уравнение могло бы иметь решение
вида
оо оо
> у(х) =xrJ2 сп*п = J2 СпХП+Г = °oxr + cixr+1 + с2хг+2 + • • • (9)
п=0 п=0
—произведение хт и степенного ряда. Это, оказывается, очень плодотворная догадка;
согласно теореме 1 (которая скоро будет сформулирована формально), каждое уравнение вида A),
имеющее регулярную особую точку х = 0, действительно имеет по крайней мере одно
такое решение. Этот факт служит основанием для метода Фробениуса, названного по имени
немецкого математика Георга Фробениуса A848-1917), который открыл этот метод в 1870-х
годах.
Бесконечный ряд вида (9) называют обобщенным степенным рядом2. Обратите
внимание, что обобщенный степенной ряд, вообще говоря, не является степенным рядом.
Например, при г = — \ ряд (9) принимает вид
у = с0х~1/2 + ах1/2 + с2х3/2 + с3х5/2 + • • • ;
это вовсе не ряд по целым степеням х.
Чтобы исследовать возможное существование решений в виде обобщенного степенного
ряда, мы начинаем с уравнения
> х2уп + хр{х)у' + q{x)y = 0, A0)
которое получается умножением уравнения C) на х2. Если х = 0—регулярная особая точка,
то функции р(х) и q(x) являются аналитическими в точке х = 0, так что
р{х) =p0+pix+p2x2+рзх3+ -• ,
q{x) = qo 4- q\x + q2x2 + q3xs 4 •
1 Это уравнение называется определяющим уравнением (в особой точке х = 0). Часто это уравнение называется
также характеристическим уравнением. — Примеч. ред.
2 В оригинале Frobenius series —рядом Фробениуса. — Примеч. ред.
8.3. Регулярные особые точки 729
Предположим, что уравнение A0) имеет решение в виде обобщенного степенного ряда
оо
> y = Y,Cn*n+r- A2)
71=0
Мы можем (и всегда это делаем) предполагать, что cq ф 0, потому что хотим, чтобы первый
член ряда был отличным от нуля. Почленное дифференцирование уравнении A2) приводит к
оо
> y' = ;£cn(n + r)x"+'-1 A3)
71=0
И
оо
> у" = Y; Cn(n + г)(п + г - 1)хп+г. A4)
71=0
Подстановка рядов из равенств A1)—A4)в уравнение A0) теперь приводит к равенству
[г(г - 1)сохг + (г + l)rcixr+1 + •••] +
+ [pox + pix2 Н ] • [rcQXr~1 + (г + l)cixr H ] +
+ [qo + qix + ---] • [c0xr + cixr+1 + ..-] =0. A5)
Самая низкая степень х, которая появляется в равенстве A5), — это хг. Если равенство A5)
удовлетворяется тождественно, то коэффициент г (г — 1 )со+рогсо + <7оО) при хг должен
обратиться в нуль. Поскольку со ф 0, из этого следует, что г должно удовлетворять квадратному
уравнению
> r(r-l)+p0r + q0 = 0 A6)
точно того же самого вида, что и полученное с помощью равноразмерного уравнения G).
Уравнение A6) называют определяющим уравнением3 дифференциального
уравнения A0), а его два корня (возможно равных) — показателями степени4
дифференциального уравнения (в регулярной особой точке х = 0).
Наш вывод уравнения A6) показывает, что если обобщенный степенной ряд
У = хг ^Г СпХп
является решением дифференциального уравнения A0), то показатель степени г должен
быть одним из корней г\ и г2 определяющего уравнения A6). Если г\ Ф г2, то из этого
следует, что может существовать два возможных решения в виде обобщенного степенного
ряда, тогда как если г\ = г% то существует только одно решение в виде обобщенного
степенного ряда; второе решение не может быть обобщенным степенным рядом. Показатели
степени г\ и г^ в возможных решениях в виде обобщенного степенного ряда определяются
3 Это уравнение зависит, конечно, от особой точки, в которой оно получено. Поэтому это уравнение при желании
подчеркнуть эту зависимость называется определяющим уравнением в особой точке х = 0. Кроме того, как
уже указывалось, часто это уравнение называется также характеристическим уравнением. — Примеч. ред.
4 А также характеристическими показателями. — Примеч. ред.
Пример 3
730 Глава 8. Методы степенных рядов
(из определяющего уравнения) по значениям ро = р@) и qo = q@) так, как мы только
что обсудили. Практически, особенно когда коэффициенты дифференциального уравнения
в первоначальной форме A) представляют собой многочлены, самый простой способ найти
ро и qo часто состоит в том, чтобы записать уравнение в форме
// , Po+PiX+p2x2 + --- , qo + qix + q2x2 + •••
Тогда простой взгляд на ряды, которые стоят в этих двух числителях, позволяет определить
константы ро и до-
Найдем возможные показатели степени в решениях уравнения
2ж2A + х)у" + ЗжA + xfy' - A - х2)у = 0
в виде обобщенных степенных рядов.
Решение Сначала мы делим каждый член на 2ж2A + х). Это позволяет представить
дифференциальное уравнение в форме
„ §A + 2ж + ж2) , -Ш-х)
у" + ^ -у' + -^—-у = 0
ж х2
и таким образом определить, что ро = § и qo = — |. Следовательно,
определяющее уравнение имеет вид
r(r-l) + §r-i = r2 + ir-! = (r + l)(r-i) = 0;
его корни г 1 = |иг2 = —1. Два возможных решения в виде обобщенного
степенного ряда имеют тогда вид
оо оо
у г (х) = ж1/2 ^ апхп и у2(ж) = ж-1 ]Г 6пжп. ■
п=0 п=0
Решения в виде обобщенных степенных рядов
Как только известны показатели степени г i и т2, коэффициенты решения в виде обобщенного
степенного ряда определяются подстановкой рядов из равенств A2)-( 14) в
дифференциальное уравнение, по сути, этот же самый метод использовался для определения коэффициентов
в решениях в виде степенного ряда в разделе 8.2. Если показатели степени г i иг2 комплексно
сопряженные, то всегда существуют два линейно независимых решения в виде обобщенных
степенных рядов. Здесь мы ограничим наше внимание случаем, в котором оба числа г\ и г2
являются вещественными. Мы также будем искать решения только для х > 0. Как только
такое решение будет найдено, нужно будет только заменить xTl на \х\Г19 чтобы получить
решение для х < 0. Следующая теорема доказана в главе 4 книги Коддингтона (Coddington)
An Introduction to Ordinary Differential Equations, посвященной введению в обыкновенные
дифференциальные уравнения.
8.3. Регулярные особые точки 731
Теорема 1
Решения в виде обобщенного степенного ряда
Предположим, что х = 0—регулярная особая точка уравнения
> х2у" + хр(х)у' + q(x)y = 0. A0)
Пусть р > 0 обозначает наименьший из радиусов сходимости степенных рядов
оо оо
р(х) - YLpnxTl и q№= 5Zqnxn-
п=0 п=0
Пусть щ и г2 — корни определяющего уравнения г (г — 1) + рог + q0 = 0, причем г\ ^ Г2.
Тогда
(a) для я > 0 существует решение уравнения A0) вида
оо
> У1(х) = хГ1 ^ апхп К ^ 0), A8)
71=0
Соответствующее большему корню г\;
(b) если г\ — Г2 не равно ни нулю, ни положительном^ целому числу, то для х > 0
существует второе линейно независимое решение вида
оо
>► у2(х)=хг>^ьпхп (Ьо^О), A9)
71=0
соответствующее меньшему корню г 2.
Радиус сходимости каждого степенного ряда в уравнениях A8) и A9) по крайней мере не
меньше, чем р. Коэффициенты этих рядов можно определить, подставляя ряды в
дифференциальное уравнение
х2у" + хр{х)у' + q(x)y = 0. А
Мы уже видели, что если г\ — Г2, то может существовать только одно решение в виде
обобщенного степенного ряда. Оказывается, что если т\ — г2 — положительное целое число,
то второе решение, соответствующее меньшему корню г2, в виде обобщенного степенного
ряда вида, указанного в равенстве A9), может существовать, а,может, и не существовать.
Эти исключительные случаи обсуждаются в разделе 8.4. Примеры 4-6 иллюстрируют
процесс определения коэффициентов в таких решениях в виде обобщенного степенного ряда,
существование которых гарантируется теоремой 1.
Пример 4
Найдем решения в виде обобщенного степенного ряда для уравнения
2х2у" + Ъху' - (х2 + 1)у = 0. B0)
Решение Сначала мы делим каждый член на 2х2. Это позволяет придать уравнению
форму равенства A7):
3 _I_Ir2
y" + V + 2 22 У = 0' B1>
X Xz
732 Глава 8. Методы степенных рядов
Мы теперь видим, что х = 0 — регулярная особая точка и что ро = §
и qo = — |. Поскольку р(х) = § и q{x) = — | — |ж2 — многочлены,
полученный обобщенный степенной ряд будет сходиться для всех х > 0.
Определяющее уравнение имеет вид
r(r-l) + §r-i = (r-!)(r + l)=0,
так что показатели степени равны г 1 = |иг2 = —1. Их разность не равна
целому числу, так что теорема 1 гарантирует существование двух линейно
независимых решений в виде обобщенных степенных рядов. Вместо того
чтобы по отдельности подставлять
У1 = х-'2 ]Г апхп и у2 = х г^2 Ьпхп
п=0 п=0
в уравнение B0), более эффективно начать с подстановки у = хг ^2 спхп.
Мы тогда получим рекуррентную формулу, которая зависит от г. При
значении г 1 = \ она становится рекуррентной формулой для ряда для у\9
тогда как при г 2 = — 1 она становится рекуррентной формулой для ряда
для у2.
Когда мы подставляем
п=0 п=0
^п+г-1
/' = Х^П + Г)(П + Г ~ 1УпхП
лу" X l/K>_J_/r»ll/K>_J_/r» I l/i т»^ ~Т~Г ^
n=0
в уравнение B0) — первоначальное дифференциальное уравнение, а не
в уравнение B1), — мы получаем
2 JT(n + r)(n + г - l)cnxn+r + 3 ]Г(п + r)cn
n=0 n=0
xn+r
-£cn^+2-£cnz^=0.
n=0 n=0
B2)
На этом этапе продолжить поиск решения можно несколькими
способами. Хорошая стандартная практика состоит в том, чтобы сдвинуть
индексы так, чтобы показатель степени в каждом ряде был один и Тот же
самый, причем он должен равняться наименьшему имеющемуся в
наличии. В этом примере мы сдвигаем индекс суммирования в третьей сумме
на —2, чтобы уменьшить ее показатель степени от п + г + 2 до п + г. Это
8.3. Регулярные особые точки 733
дает
оо
п+г
2 ^2(п + г)(п + г - 1)спхп+г + 3 ^2(п + г)спх
п=0 п=0
оо оо
- J2 Сп-2*П+Г - ^ СпХП+Г = 0.
п=2 п=0
B3)
Общий диапазон суммирования — п ^ 2, так что мы должны учесть
случаи п = 0 и п = 1 отдельно. Если следовать нашей стандартной
практике, члены при п = 0 всегда дадут определяющее уравнение
[2г(г - 1) + Зг - 1]со = 2 (г2 + |г - §) с0 = 0.
Члены, соответствующие п = 1, дают
[2(г + 1)г + 3(г + 1) - l]ci = Br2 + 5r + 2)ci = 0.
Поскольку коэффициент 2г2 + Ъг + 2 при ci отличен от нуля при г = |
и г = —1, в любом случае
d = 0. B4)
Коэффициент при хп+г в уравнении B3) равен
2(п + г) (га + г - \)сп + 3(n + r)cn - сп_2 - сп = 0.
Мы решаем это уравнение относительно сп и упрощаем результат; таким
образом мы получаем рекуррентную формулу
сп = тй—, \2 Г? , л—7 для га ^ 2. B5)
2(п + гJ + (п + т) — 1
Случай 1: п = |. Мы теперь пишем ап вместо сп и подставляем г = |
в уравнение B5). Это дает рекуррентную формулу
ап~2 для га ^2. B6)
2га2 + Зп
С помощью этой формулы мы можем определить коэффициенты в первом
решении у\ в виде обобщенного степенного ряда. Из уравнения B4) мы
видим, что ап = 0 для нечетных п. Полагая га = 2,4 и б в уравнении B6),
мы получаем
ао ^2 <2о 6Ц <2о
а2 = Т7> а4 — Т7 = ТГГ^ И а6 =
14' * 44 616 u 90 55440
Следовательно, первое решение в виде обобщенного степенного ряда
имеет вид
mix) = а0ж1/2 [ Ц 1 1 1 ) .
m ' V 14 616 55440 /
734
Глава 8. Методы степенных рядов
Пример 5
Случай 2: г 2 = —1. Мы теперь пишем Ъп вместо сп и подставляем
г = — 1 в уравнение B5). Это дает рекуррентную формулу
bn = w^ тяп = 2- B7)
И снова, из уравнения B4) следует, что Ъп = 0 для нечетных п. Полагая
п = 2,4 и б в B7), мы получаем
, Ьо , Ь2 bo , 64 b0
б2 = Т' б4=20 = 40 И Ьб=54 = 21б0- '
Следовательно, второе решение в виде обобщенного степенного ряда
имеет вид
(v _ 1 / _ X X X
х) = box 1H 1 1 h •
; ° V 2 40 2160
Найдем решение в виде обобщенного степенного ряда уравнения Бесселя
нулевого порядка
х2у" + ху' + х2у = 0. B8)
Решение В <|юрме A7) уравнение B8) принимает вид
у" + -у' 4- ^о У = °-
X X2
Следовательно, х = 0—регулярная особаяточка,причемр(ж)=1ид(х) =
= х2, так что наш ряд будет сходиться для всех х > 0. Поскольку ро — 1
и до = 0, определяющее уравнение имеет вид
г(г — 1) 4- г = г2 = 0.
Таким образом, мы получаем только один единственный показатель
степени г = 0, и поэтому есть только одно решение в виде обобщенного
степенного ряда
оо
у(х) =! Х° Y^ СпХП
71=0
уравнения B8); фактически оно представляет собой степенной ряд.
Таким образом, мы подставляем у = ]Г спхп в B8); в результате
получаем
оо сю сю
53 п(п - 1)спХп + 53 пспхп + 53 СпХп+2 = 0.
П=0 71=0 71=0
Мы объединяем первые две суммы и сдвигаем индекс суммирования
в третьей на —2 и в результате получаем
сю сю
53 П2СпХП + 53 Сп-2#П = 0.
п=0 п=2
8,3. Регулярные особые точки
735
Член, содержащий х°, дает 0 = 0: никакой новой информации. Член,
содержащий х1, дает с\ = 0, а член для хп приводит к рекуррентной
формуле
Сп =
Сп-2
' п2
дляп ^ 2.
B9)
Поскольку ci = 0, мы видим, что сп = О для нечетных индексов п.
Подставляя п = 2,4 и 6 в уравнение B9), мы получаем
со
со
__ _ _£2 _
С2 - 22 , С4 - 42 ~ 22 . 42
Очевидно, общий член равен
С2п
(~1)псо
— _£i — Ср
И Сб~ б2 ~ 22-4262'
()псо
22 • 42 • • • BпJ 22"(п\J'
Выбор со = 1 дает нам одну из самых важных специальных функций
в математике, функцию Бесселя нулевого порядка первого рода,
обозначаемую Jq(x). Таким образом,
М*) = 2^ 22n(n!J =i-T +
n=0 v y
64 2304
+ •
C0)
В этом примере мы не смогли найти второе линейно независимое
решение уравнения Бесселя нулевого порядка. Мы получим такое решение
в разделе 8.4; это будет не обобщенный степенной ряд. ■
Случай, когда гг - г2 — целое число
Как вы помните, если г\ — г2—положительное целое число, то теорема 1 гарантирует
существование только того решения в виде обобщенного степенного ряда, которое соответствует
большему показателю степени т\. Пример 6 иллюстрирует счастливый случай, в котором
метод рядов тем не менее приводит ко второму решению в виде обобщенного степенного
ряда. Случай, в котором второе решение не является обобщенным степенным рядом, будет
обсуждаться в разделе 8.4.
Пример б
Найдем решение в виде обобщенного степенного ряда для уравнения
xy" + 2i/ + xy = 0. C1)
Решение В стандартной форме уравнение принимает вид
2 х2
у" + -у' + -ji/ = 0,
X Хг
так что мы сразу видим, что х — 0 — регулярная особая точка, причем
Ро = 2 и qo = 0. Определяющее уравнение
г(г - 1) + 2г = г(г + 1) = 0
736 Глава 8. Методы степенных рядов
имеет корни г 1 = 0 и г2 = —1, разность которых равна целому числу.
В этом случае, когда г\ — г^ — целое число, лучше отступить от
стандартной процедуры примера 4 и начать работу с меньшего показателя
степени. Как вы увидите, рекуррентная формула в этом случае
подскажет, действительно ли существует второе решение в виде обобщенного
степенного ряда. Если оно действительно существует, наши вычисления
одновременно приведут к обоим решениям в виде обобщенного
степенного ряда. Если второе решение не существует, мы снова начнем с большего
показателя степени г = г\ и получим одно решение в виде обобщенного
степенного ряда, наличие которого гарантируется теоремой 1.
Следовательно, мы начинаем с подстановки
оо сю
У z= X У СпХ = У CjiX
п=0 п=0
в уравнение C1). Она приводит к равенству
оо оо со
5^(п - 1)(п - 2)спхп-2 + 2 5^(п - 1)спхп-2 + ^ Спхп = 0.
п=0 < п=0 * п=0
Мы комбинируем первые две суммы и сдвигаем индекс на —2 в третьей,
в результате чего получаем
оо оо
53 п(п - 1)спхп-2 + 53 сп-2Хп-2 = 0. C2)
п=0 п=2
Случаи п = 0 и п = 1 приводят к равенствам
0 • со = 0 и 0 • а = 0.
Следовательно, мы имеем две произвольные постоянные со и с\ и поэтому
можем ожидать найти общее решение, содержащее два линейно
независимых решения в виде обобщенных степенных рядов. Если бы для п = 1
мы получили уравнение вроде 0 • с\ = 3, которое не удовлетворяется ни
при каком значении о\, это подсказало бы нам, что второе решение в виде
обобщенного степенного ряда существовать не могло бы.
Теперь же, зная, что все хорошо, из C2) мы получаем рекуррентную
формулу
сп = , п~ 1Л дляп^2. C3)
п{п — 1)
Первые несколько значений п дают
С2 = -зтусо, с3= -—d,
1 Со 1 Ci
С4 = ~4^С2 =4!' С5 = -^4СЗ=5!'
1 с0 1 с\
06 = _6^5С4 = - 6!' С7 = 'ТГб06 = - 7!;
8.3. Регулярные особые точки 737
очевидно, что общий член равен
(-1)п<*
С2п —
С2п+1
(-l)nci
Bn)! ' zni_1 Bn + l)!
для п ^ 1. Поэтому общее решение уравнения C1) имеет вид
у(ж) = х г Y^ cnXn =■
п=0
С0 Л X2 X4 \ С\ ( X3 ХЪ \
= 7(,1-2! + 4!-'--J+^r~3! + 5!----J
(-l)"x2n ci ^ (-1)пж2п+1
х ^ Bп)!
Таким образом,
^ Bп)! + х ^ Bп + 1)! "
n=0 v y n=0 v '
1
у(х) = — (cocosx + с\ sinx).
Этим способом мы нашли общее решение, выраженное линейной
комбинацией двух решений в виде обобщенных степенных рядов
, ч cos х , sin a;
У\[х) = и у2[х)
C4)
X X
Как показано на рис. 8.3.1, одно из этих решений в виде обобщенного
степенного ряда ограничено, а другое неограничено в окрестности
регулярной особой точки х = 0 ; это обычное явление в случае показателей
степени, отличающихся на целое число. ■
Рис. 8*3.1. Решения у\ (х) ■
sin х
и у2 (х) = в примере 6
х
cos ж
Резюме
Когда мы сталкиваемся с линейным дифференциальным уравнением второго порядка
> А(х)у" + В{х)у' + С(х)у = О
738 Глава 8. Методы степенных рядов
с аналитическими коэффициентными функциями, то, чтобы исследовать возможное
существование решений в виде ряда, мы сначала записываем уравнение в стандартной форме:
> y" + P(x)y' + Q(x)y = 0.
Если Р(х) и Q(x) являются и аналитическими в точке х = 0, то я; = 0—обыкновенная точка
и уравнение имеет два линейно независимых решения в виде степенного ряда.
В противном случае х = 0 является особой точкой, и мы в этом рлучае записываем
дифференциальное уравнение в форме
> у" ■+ ^-V + ^-v = о.
х х2
Еслиобефункциир(ж)ид(х)являютсяаналитическимивточкеж = 0,тох = 0—регулярная
особая точка. В этом случае мы находим два показателя степени г\ и г 2 (предполагая, что
они вещественны, причем r\ ^ гг), решая определяющее уравнение
> г(г -1L- рог 4 <?о = 0,
гдеро = р@) и qo = q@). Всегда существует решение в виде обобщенного степенного ряда
у = xTlY, 0"пХп9 соответствующее большему показателю степени п, причем, если г\ — г 2
не равно целому числу, то также гарантируется существование второго решения в виде
обобщенного степенного ряда у2 = х,Г2 J2 Ъпхп-
8.3. Задачи
В задачах 1-8 определите, является лих = 0 обыкновенной точкой, регулярной особой точкой или
иррегулярной (нерегулярной) особой точкой. Если это регулярная особая точка, найдите
показатели степени дифференциального уравнения в точке х = 0.
1. ху" Л-{х- х3)у' 4 (sinх)у = 0 2. ху" 4 х2у' 4 (ех - 1)у = 0
3. х2у" 4 (cos х)у' 4 ху = 0 4. Зх3у" 4 2х2у' 4- A - х2)у - 0
5. хA + х)у" 4 2у' + Зху = 0 6. х2A - х2)у" 4 2ху' - 2у = 0
7. ж2?/" 4- F sin х)у' 4 6у = 0 8. Fх 4 2х3)у" 4 21ху' 4 9(х2'- 1)у = 0
Если х = а ^ 0 — особая точка линейного дифференциального уравнения второго порядка, то
подстановка t = х — а преобразует это дифференциальное уравнение в дифференциальное
уравнение, имеющее t = 0 в качестве особой точки. Затем мы считаем, что первоначальное уравнение
в точке х — а имеет такое же поведение, что и новое уравнение в точке t = 0.
Классифицируйте (как регулярные или иррегулярные (нерегулярные)) особые точки дифференциальных уравнений,
данных в задачах 9-16.
9. A - х)у" 4 ху' 4 х2у = 0 10. A - хJу" 4 Bх - 2)у' 4 у = 0
11. A - х2)у" - 2ху' 4 12у = 0 12. (х - 2Kу" 4 3(х - 2)У 4 х3у = 0
13. (я2 - 4)у" 4 (х - 2)у' 4 (х 4 2)у = 0 14. (х2 - 9Jу" 4 (х2 4 9J/' 4 (х2 4 4)у = 0
15. (х - 2Jуп - (х2 - 4)у' + (х 4 2)у = 0 16. х3A - х)у" 4 (Зх 4 2)у' 4 ху = 0
5 задачах 17-26 найдите два линейно независимых решения в виде обобщенного степенного ряда
(для х > 0) каждого из данных дифференциальных уравнений.
8.3. Регулярные особые точки 739
17. 4жу" + 2у' + У = О
19. 2ху"-у'-у = 0
21. 2ж2у" -f V - A + 2ж2)у = О
23. 6х2у" + 7жу' - (ж2 + 2)у = О
25. 2жу"+ A + ж)у' + у = О
18. 2жу" + Зу' - у = О
20. Зжу" + 2у' + 2у = О
22. 2х2у" + ху' - C - 2ж2)у = О
24. Зж2у" + 2жу' + х2у = О
26. 2жу" -Ь A -2ж2)у' - 4жу = О
5 задачах 27-31 примените метод примера б и найдите два линейно независимых решения в виде
обобщенного степенного ряда данных дифференциальных уравнений. Затем начертите их графики
для х > 0. N
27. ху" + 2у' + 9ху = О
29. 4жу" + 8у' + жу = О
31. 4ж2у" - 4жу' + C - 4ж2)у = О
28. ху" + 2у' - 4жу = О
30. ху" -у' Л- 4ж3у = О
В задачах 32-34 найдите первые три отличных от нуля члена каждого из двух линейно независимых
решений в виде обобщенного степенного ряда.
32. 2ж2у" + ж(ж + 1)у' - Bх + 1)у = О 33. Bж2 + 5ж3)у" + (За; - х2)у' - A + х)у = О
34. 2х2у" + (sinx)y' — (cosx)y = 0
35. Обратите внимание, что х = 0 — иррегулярная (нерегулярная) точка уравнения
хV + (Зж - \)у + у = 0.
(a) Покажите, что у = хг^СпХп может удовлетворять этому уравнению, только если г = 0.
(b) Подставьте у = £)спжп и получите "формальное" решение у = ]Пп!жп. Каков радиус
сходимости этого ряда?
36. (а) Предположим, что А и В — отличные от нуля константы. Покажите, что уравнение х2у" +
-Ь Ау' -Ь By = 0 имеет самое большее одно решение вида у = xr J2 спхп. (Ь) Повторите
действия, выполненные в части (а) для уравнения х3у" + Аху' + By = 0. (с) Покажите, что
уравнение х3у" + Ах2у' + By — 0 не имеет ни одного решения в виде обобщенного степенного
ряда. (Указание. В каждом случае подставьте у = хг ^ СпЖп в данное уравнение и определите
возможные значения г.)
37. (а) Используйте метод Фробениуса и получите решение у\ — х уравнения х3у" — ху' + у = 0.
(Ь) Проверьте подстановкой второе решение у2 = же-1/*. Можно ли у2 представить в виде
обобщенного степенного ряда?
38. Примените метод Фробениуса к уравнению Бесселя порядка \
хУ + ху + (ж2 - \) у = 0
и получите его общее решение для х > 0,
, ч cos a: sin ж
У(Х) =Со—рг- +С1-
ч/ж
V^ '
На рис. 8.3.2 показаны графики двух указанных там решений.
740 Глава 8. Методы степенных рядов
Рис. 8.3.2. Решения yi(x) =
, ч sin ж -0
и у2(х) = —— в задаче 38
cos ж
\[х
л/х
39. (а) Покажите, что уравнение Бесселя порядка 1
х2у" + ху' + (х2 - 1)у = 0,
имеет показатели степени Г1 = 1иг2 = —1в точке х = 0 и что обобщенный степенной ряд,
соответствующий г\ = 1, представляет собой
(-1)"*2
lW 2^n!(n+l)!22"'
n=0 v 7
(b) Покажите, что нет ни одного решения в виде обобщенного степенного ряда,
соответствующего меньшему показателю степени г 2 = —1; иными словами, покажите, что для ряда
У2 (х) =Х 1'*ГспХП
невозможно определить коэффициенты.
40. Рассмотрим уравнение х2у" + ху' + A — х)у = 0. (а) Покажите, что его показатели степени
равны ±г, так что оно имеет комплекснозначные решения в виде обобщенных степенных рядов
У+
= х 2^ РпХ и у- = х 2^, QnX »
1 п=0 п=0
причем ро = qo = 1. (b) Покажите, что рекуррентная формула имеет вид
Сп-1
Сп =
га2 + 2гга *
Примените эту формулу при г = г и получите равенство рп = сп, а затем примените ее при
г = — г и получите #п = Сп. Заключите, что рп и gn комплексно сопряженные: рп = ап +
+ г6п и #п = ап — ibni где числа {ап} и {6П} вещественны, (с) Выведите из части (Ь), что
дифференциальное уравнение, данное в этой задаче, имеет действительные решения вида
yi (х) = ^(x)cos(lnx) — B(x)sm(lnx),
2/2 (ж) = A(x)sin(lnx) + S(x)cos(lnx),
где Л(ж) = J2 апхп и Б(х) = £ 6пжп.
8.3. Регулярные особые точки 741
41. Рассмотрим дифференциальное уравнение
х(х - 1)(х + 1)У + 2х(х - 3)(ж + 1)у - 2(х - 1)у = О,
которое появилось в рекламе программы символической алгебры в мартовском выпуске
A984 года) американского математического ежемесячника American Mathematical Monthly.
(a) Покажите, что х = 0 — регулярная особая точка с показателями степени щ = 1 и г2 — 0.
(b) Из теоремы 1 следует, что это дифференциальное уравнение имеет решение в виде
степенного ряда вида
2/1 (х) = х + с2х2 + сзх3 Н .
Подставьте этот ряд (при с\ = 1) в дифференциальное уравнение, чтобы показать, что сг = —2,
сз j= 3, и
_ (гс2 — rQcn-i + (п2 — 5п — 2)сп — (п2 + 7п + 4)сп+1
Cn+2~ (n + l)(n + 2)
для га ^ 2. (с) Используйте рекуррентную формулу из части (Ь), чтобы доказать индукцией, что
Сп = (—1)п+1п для га ^ 1 (!). Как следствие выведите (используя бесконечную геометрическую
прогрессию), что
для 0 < ж < 1.
42. Эта задача представляет собой краткое введение в изучение гипергеометрического уравнения
Гаусса
хA - х)у" + [7 -(ol + P + 1)ж]у' - a/fy = 0, C5)
где а, /3 и 7 — константы. Это знаменитое уравнение имеет всесторонние приложения в
математике и физике, (а) Покажите, что х = 0 — регулярная особая точка уравнения C5), причем
показатели степени равны 0 и 1 — 7- (Ь) Если 7 отлично от нуля и не равно отрицательному
целому числу, то, следовательно (почему?), уравнение C5) имеет решение в виде степенного
ряда
оо оо
у{х) = Х° ^2 спХП = ^2 Cn#n,
п=0 п=0
i причем со Ф 0. Покажите, что рекуррентная формула для этого ряда имеет вид
_ (g + n)(/? + n)
Сп+1~ A + п)A + п)Сп
для га ^ 0. (с) Выведите, что при со = 1 ряд из части (Ь) принимает вид
~0п!^
где с*п = «(а + 1)(с* Н- 2) ♦ • • (а + га — 1) для га ^ 1, а /?п и 7п определены аналогично.
(d) Ряд C6) называется гипергеометрическим рядом и обычно обозначается F(a,/31^y,x).
Покажите, что
(i) F(l, 1, l,ar) = (бесконечная геометрическая прогрессия);
1-х
(ii) a?F(l, 1,2, -ж) = 1пA + ж);
(iii) xF (|, 1, |, -ж2) = arctgx;
(iv) F(—k, 1,1, — ж) = A + x)fc (биномиальный ряд).
742 Глава 8. Методы степенных рядов
8.3. Приложение. Автоматизация метода
обобщенных степенных рядов
Здесь мы проиллюстрируем использование системы компьютерной алгебры (такой как
Maple) для автоматизации вычислений, выполняемых по методу Фробениуса. Конечно,
автоматизировать вычисления, выполняемые по методу Фробениуса, можно не только с
помощью таких приложений, как Maple, Mathematica и Matlab; по образцу приведенных здесь
программ можно написать много других, своих собственных, цритом на многих других
языках. В этом разделе мы рассматриваем дифференциальное уравнение
2хУ + Зх</ - (я2 + 1)у = 0 A)
из примера 4, где мы нашли два корня определяющего уравнения т\ = \ и г 2 = — 1.
Начиная с корня определяющего уравнения г 1 = |, мы сначала запишем начальные семь
членов предложенного решения в виде обобщенного степенного ряда:
а := array@..6):
у := xA(l/2)*sum( a[n]*xA(n), n = 0..6);
у := у/х (ао 4- а\х 4- а2#2 + а^х3 4- сця4 4- а$х5 4- a^x6)
Затем мы подставляем этот ряд (фактически частичную сумму) в левую часть уравнения A).
deql := 2*xA2*diff(у,х$2) + 3*x*diff(у,х) - (хА2 + 1)*у:
Очевидно, общий множитель хъ12 будет вынесен за скобки после упрощения, так чтх) мы
умножаем на ж-3/2 и затем суммируем коэффициенты при одинаковых степенях х, иными
словами, приводим подобные:
deq2 := collect ( хА(-3/2)*simplify(deql), х);
# привести подобные и упростить
deq2 := —х7ае — х6а^ 4- (90ae — сц)^ 4- (—аз 4- 65аб)ж4
4- (-аг + 44а4)х3 4- (-ai 4- 27а3)я2 4- A4а2 - а0)х 4- Ъа\
Мы видим здесь уравнения, которым должна удовлетворять последовательность
коэффициентов. Мы можем вычислить их автоматически. Для этого сначала определим массив,
а затем заполним элементы этого массива, приравнивая нулю (по очереди) каждый
коэффициент ряда:
eqs := а-ггау @ . . 5) : # уравнения: = массив @..5)
for n from 0 to 5 do # для п от 0 до 5 выполнить
eqs[n] := coeff(deql,x,n) = 0: od:
# уравнения[n]: = коэффициент
coeffEqs := convert(eqs, set);
coeffEqs := {5ai = 0, — a^ 4- 44a4 = 0, —аз 4- 65a5 = 0,
90аб — 04 = 0, 14a2 — ao = 0, —oi 4- 27аз = 0}
Мы теперь имеем совокупность шести линейных уравнений, связывающих эти семь
коэффициентов (от ао до ав). Следовательно, мы можем продолжить решение для того,
чтобы найти последовательность коэффициентов, выразив их через ао:
8,3. Регулярные особые точки 743
succCoeffs := convert{[seq(a[n], n=l..6)], set);
ourCoeffs := solve(coeffEqs, succCoe,ffs) ; # решить
^ re f ' 1 1
ourCoeffs := < a\ = 0, clq = gg/l/tnQo? &4 = ^7^a05
55440"°' 6НГ
Таким способом мы получили первое частное решение
tfl(x) = aox^(l + g + ^ + ^5 + ...),
найденное в примере 4. Вы можете теперь повторить этот процесс, начиная с корня
определяющего уравнения r<i = — 1, и подобным способом получить второе частное решение.
В следующих задачах используйте данньщ метод и получите решения в виде
обобщенного степенного ряда, которые могут быть проверены с помощью данных известных общих
решений:
1. ху" — у' Л- 4х3у = 0, у (х) = A cos x2 + В sin x2
2. ху" - 2у' + 9х5у = 0, у (х) = Acosx3 + В sin х3
3. 4ху" — 2у' + у = 0, у (х) = Л cos у^ 4- S sin у/х
4. ху" 4- 2у' -+- ху = 0, у (х) = — (A cos x 4- В sin x)
х
5. 4ху" 4- 6у' 4- у = 0, у(х) = ~т= (A cos у/х + В sin у/х)
у/Х
6. х2у" 4- ху' 4- Dх4 — 1)у = 0, у(х) = -(Acosx2 + J5sinx2)
х
7. ху" + Зу' + 4х3у = 0, у(х) = -г (Л cos x2 4- В sin x2)
xJ
8. х2у" 4- я2у' - 2у = 0, у(х) = -[ЛB - х) 4- ВB 4- х)е~ж]
х
В задачах 9-11 используется ряд для арктангенса
X3 X5 X7
arctgx = х ~ у + у ~ у + '' * •
9. (х 4- х3)у" 4- B 4- 4х2У 4- 2ху = 0, у(х) = - (А -4- 5 arctg x)
х
10. Bх 4- 2х2)у" 4- C 4- 5х)у' 4- у = 0, у(х) = -= (А 4- В arctg л/х)
11. (х 4- х5)у" 4- C 4- 7х4)у' + 8х3у = 0, у(х) = -*(А + В arctgx2)
xz
744 Глава 8. Методы степенных рядов
8.4. Метод Фробениуса. Исключительные случаи
Мы продолжаем наше обсуждение уравнения
> у» + рМу> + <Му = 0 A)
XX2,
где р(х) nq(x) — аналитические функция в точке х = 0, причем х = 0 — регулярная особая
точка. Если корни т\ и г^ определяющего уравнения
> ф(г) = г(г - 1) + рог + до = 0 B)
не отличаются на целое число (т. е. их разность отлична от целого числа), то теорема 1
из раздела 8.3 гарантирует, что уравнение A) имеет два линейно независимых решения
в виде обобщенного степенного ряда. Мы рассматриваем теперь более сложный случай,
в котором т\ — г^ — целое число. Если т\ = Г2, есть только один допустимый показатель
степени, и, таким образом, может существовать только одно решение в виде обобщенного
степенного ряда. Но в примере 6 из раздела 8.3 мы видели, что если г\ = г 2 Л- N, причем
N — положительное целое число, то, возможно, что существует и второе решение в виде
обобщенного степенного ряда. Мы также увидим, что возможен еще и случай, когда такое
решение не существует. На самом деле, когда второе решение не является обобщенным
степенным рядом, оно содержит In х. Как вы увидите в примерах 3 и 4, эта исключительные
случаи встречаются при решении уравнения Бесселя. Для приложений это самое важное
линейное дифференциальное уравнение второго порядка с переменными коэффициентами.
Нелогарифмический случай при ri = r2 + N
В разделе 8.3 мы получили определяющее уравнение, подставляя степенные ряды р(х) =
= Z1 РпХп и g(a?) = Y1 QnXn и обобщенный степенной ряд
со
► y{x) = xrY,CnXn = Y<CnXn+r to^0) <3>
П=0 71=0
в дифференциальное уравнение вида
> х2у" + хр{х)у' + q(x)y = 0. D)
В результате этой подстановки, после суммирования коэффициентов (приведения
подобных) при одинаковых степенях х, получилось уравнение вида
со
Y,Fn(r)xn+r = 0, E)
п=0
в котором коэффициенты зависят от г. Оказалось, что коэффициент при хг равен
Щг) = [г(г - 1) 4- Рог + q0]co = ф(г)с0, F)
что дает определяющее уравнение, потому что со Ф 0 в соответствии с предположением;
кроме того, для п ^ 1 коэффициент при хп+г имеет вид
Fn(r) = Ф(г + п)сп + Ln(r\cqjCu • • • 5 cn_i). G)
8.4. Метод Фробениуса. Исключительные случаи 745
Здесь Ln—некоторая линейная комбинация со, с\,..., cn_ i. Хотя точная формула нисколько
не необходима для наших целей, мы выпишем ее:
п-1
Ln = Х][(г + к)рп-к + qn-k]ck. (8)
fc=0
Поскольку все коэффициенты в равенстве E) должны обратиться в нуль для обобщенного
степенного ряда, являющегося решением уравнения D), то показатель степени г и
коэффициенты со, ci,..., сп должны удовлетворять уравнению
ф(г + п)сп + Ln(r; со, ci,..., cn_i) = 0. (9)
Это и есть рекуррентная формула для коэффициента сп, выражающая его через со, с±,...,
Теперь предположим, что г\ — г2 -V N, причем N — положительное целое число. Если
мы подставим больший показатель степени г\ в уравнение (9), то коэффициент ф(г\ + п)
при сп будет отличен от нуля для каждого п ^ 1, потому что ф(г) = 0 только тогда, когда
г = г\ и когда г = гг < гь Как только определены со, ci, ..., cn_i, мы можем решить
уравнение (9) относительно сп и продолжить вычислять последовательные коэффициенты
в решении в виде обобщенного степенного ряда, соответствующего показателю степени т \.
Но когда мы подставим меньший показатель степени г2, при вычислении сдг может
возникнуть затруднение. Поскольку в этом случае ф(тч -h N) = 0, уравнение (9) принимает
вид
0 • cN + LN(r2; со, а,... ,саг-1) = 0. A0)
На этом этапе со, с±,..., сдг-i уже определены. Если Скажется, что
Ln{t2\ со, ci, ..., сдг-i) = 0,
тогда мы сможем выбрать сдг произвольно и продолжить определять остальные
коэффициенты во втором решении в виде обобщенного степенного ряда. Но если окажется, что
biv(r2;Co,Ci,...,CAT-l) Ф 0,
тогда уравнение A0) не удовлетворяется ни при каком выборе сдг; в этом случае не
может существовать второе решение в виде обобщенного степенного ряда, соответствующее
меньшему показателю степени г2. Примеры 1 и 2 иллюстрируют эти две возможности.
х2у" Л- Fж + х2)у' + ху = 0. A1)
Здесь ро = 6 и до = 0, так что определяющее уравнение имеет вид
ф(г) = г(г - 1) + 6г = г2 + Ъг = 0, A2)
а его корни равны ri = 0 и Г2 = —5; корни отличаются на целое число
N = 5. Мы подставляем обобщенный степенной ряд у = Yl cnxn+r
746
Глава 8. Методы стеленных рядов
и получаем
оо
^2(n + r)(n + r- l)cnxn+r + 6j2(n + r)cnxn+r +
П=0 П=0
OO
+ S(» + r)cnxn+r+1 + J2 cnxn+r+1 = 0.
n=0 n=0
Когда мы объединим первые две, а также последние две суммы и в
последней сдвинем индекс на —1, получим
ОО J" ОО
J2 [(п + гJ + 5(п + г)]ся5п+г + Y^(n + r)cn-ixn+r = 0.
n=0 n=l
Члены, соответствующие п = 0, дают определяющее уравнение A2),
тогда как при п ^ 1 мы получаем уравнение
[(п + гJ + 5(п + г)]сп + (п + r)cn-i = 0, A3)
которое в данном примере соответствует общему уравнению (9).
Заметьте, что коэффициент при сп равен ф(п + г).
Мы теперь следуем рекомендации в разделе 8.3 для случая т\ = г^ -f
+ЛГ:мыначинаемсменыпегокорняг2 = —б.Пригг = —5 уравнение A3)
приводится к
п(п - 5)cn + (n - 5)cn_i = 0. A4)
Еслип ф 5, мы можем решить это уравнение относительно сп и получить
рекуррентную формулу
Сй = 1?—- ДЛЯГС^б. A5)
п
Это приводит к равенствам
С\ Со
ci = -со, с2 -^2 = Т'
С2 Со Сз Со
A6)
В случае r\ = r<i + АГ всегда именно коэффициент cjv требует
специального рассмотрения. Здесь iV = 5, и при п = 5 уравнение A4) принимает
форму 0 • Сб Л- 0 = 0. Следовательно, Сб — вторая произвольная
постоянная и мы можем вычислить дополнительные коэффициенты, все еще
используя рекуррентную формулу A5):
Сб Се Сб С7 С5
Сб = --, С7 = -_ = _, С8 = __ = ___ A7)
и так далее.
8.4. Метод Фробениуса. Исключительные случаи 747
Объединив результаты, выраженные в равенствах A6) и A7), мы
получим формулу
.оо
71=0
_5 / 5 X6 X7 . X8 \
куда входят две произвольные постоянные cq и с$. Таким образом, мы
нашли два решения уравнения A1) в виде обобщенных степенных рядов
/ X X X \
J/2
n=l v ' n=l v '
Пример 2
Определим, действительно ли уравнение
х2у" - ху' + (ж2 — 8)у = О
A8)
имеет два линейно независимых решения в виде обобщенных степенных
рядов.
Решение Здесь р0 = —Inqo = —8, так что определяющее уравнение
ф(г) = г(г - 1) - г - 8 = г2 - 2г - 8 = О
имеет корни т\ = 4 и т^ = —% отличающиеся на N = 6. После
подстановки у = ]П спхп+г в уравнение A8), мы получим
(X) ОО
5^(П + Г)(П + Г - 1)СпХП+Г - Ys(U + ФпЯП+Г +
п=0
71=0
оо оо
71=0 71=0
п+т*
0.
Если мы сдвинем индекс на —2 в третьей сумме и объединим другие три
суммы, мы получим
]Г[(п + гJ - 2(п + г) - 8]с*п+г + £ сп_2х'
п+г*
0.
п=0
71=2
748
Глава 8. Методы степенных рядов
Коэффициент при хг дает определяющее уравнение, а коэффициент при
xr+1 дает равенство
[(г + IJ - 2(г + 1) - 8] а = 0.
Поскольку коэффициент с\ отличен от нуля и для г = 4, и для г = — 2, то
ci = 0 в каждом из этих случаев. Для п ^ 2 мы получаем уравнение
[(n + rJ-2(n + r)-8]cn + cn_2 = 0, A9)
которое в данном примере соответствует общему решению (9); заметьте,
что коэффициент при сп равен ф(п -f г).
Мы работаем сначала с меньшим корнем г = тч = —2. Тогда
уравнение A9) принимает вид
п(п - 6)сп + сп_2 = 0 B0)
для п ^ 2. Для п ф 6 мы можем решить это уравнение и найти
рекуррентную формулу
B1)
п(п — 6)
Поскольку ci = 0, эта формула дает
со
С2 Со
С4=8- = 64
(п
и
IIV
Теперь уравнение B0) при п = 6 приводит к
0-С6 +
со
64
0.
2, п ф 6).
с3 = 0,
С5 = 0.
равенству
Но со т^ 0 в соответствии с предположением, и, следовательно,
невозможно выбрать cq так, чтобы выполнялось это равенство. Таким образом,
нет ни одного решения в виде обобщенного степенного ряда,
соответствующего меньшему корню т^ = —2.
Чтобы найти единственное решение в виде обобщенного степенного
ряда, соответствующее большему корню г\ = 4, мы подставляем г = 4
в уравнение A9) и получаем рекуррентную формулу
сп = --£Йп (п £ 2). B2)
п(п -Ь о)
Это дает
Со С2 С0
с2 = -7ГТ> с4 =
2-8' 4 4-10 2.4.8-10"
Общий вид:
(-1)пс0 (-1)п6со
C2rj
2 • 4 • • • Bп) • 8 • 10 • • • Bп + 6) 22"п! (п + 3)!'
8.4. Метод Фробениуса. Исключительные случаи 749
Это приводит к решению уравнения A8) в виде обобщенного степенного
ряда
\n~2n
»<"■'' 1+,S5^Mii,
Понижение порядка
Когда существует только одно решение в виде обобщенного степенного ряда, нужен
дополнительный метод. Здесь мы обсудим метод понижения порядка, который дает возможность
использовать одно известное решение у± однородного линейного дифференциального
уравнения второго порядка для того, чтобы найти второе линейно независимое решение 2/2-
Рассмотрим уравнение второго порядка
> y" + P{x)y, + Q{x)y = 0 B3)
на открытом интервале /, на котором функции Р и Q непрерывны. Предположим, что
мы знаем одно решение у± уравнения B3). В соответствии с теоремой 2 из раздела 3.1,
существуют второе линейно независимое решение уч\ наша задача состоит в том, чтобы
найти 2/2- Эта задача эквивалентна следующей: найти частное
Зная v (х), получим 2/2 в виде
у2(х) = v(x)y1(x). B5)
Мы начинаем с подстановки выражения B5) в уравнение B3), используя производные
У2 = Wi + v'yi и уд = Wi + 2v;2/i + v"yi-
Мы получаем
[vy'( + 2у'у[ + г/'yi] + P [vy[ + Ai] + Qvyi = 0,
и перегруппировка дает,
у Ь/i + Ру[ + Qyi] + v"yi + 2v'y[ + Pvfyi = 0.'
Но заключенное в скобки выражение в этом последнем уравнении обращается в нуль, потому
что 2/i — решение уравнения B3). Учитывая это, получаем уравнение
t/V + Bi/i + Pyi)t/ = 0. B6)
Ключ к успеху этого метода состоит в том, что уравнение B6) линейно относительно г/.
Таким образом, замена в B5) понизила порядок уравнения второго порядка B3) и оно свелось
к линейному уравнению B6) первого порядка (относительно г/). Если обозначить и = г/
и предположить, что у\ (х) никогда не обращается в нуль на интервале /, то из уравнения B6)
получим уравнение
и,+ B^+Р(ж))и = 0. B7)
750 Глава 8. Методы степенных рядов
Интегрирующий множитель для уравнения B7) имеет вид
р = ехр I
2— + Р(х) 1 dx J = ехр ( 2 ln|yi|+ [P(x)dxj ,
так что
р(х) = у\ ехр ( P(x) dx 1 .
Мы теперь интегрируем уравнение B7) и получаем
иу\ ехр I Р(х) dx) = С, так что v' = и = —^ ехр ( — Р(х) dx ) .
Еще одно интегрирование теперь приводит к равенству
^ = v = c[eXp{-^{x)dx)dx + K.
2/1 J 2/i
Выбирая конкретные значения констант С = 1 и if = 0, получаем
^ rexpf-m*)^
J 2/i
Эта формула дает второе решение у2(х) уравнения B3) на любом интервале, где у\{х) не
обращается в нуль. Обратите внимание, что поскольку экспоненциальная функция никогда
не обращается в нуль, у2 (х) представляет собой (непостойнную) функцию, умноженную на
2/i (ж), так что 2/i и у2 — линейно независимые решения.
Логарифмические случаи
Мы теперь исследуем общую форму второго решения уравнения
> у» + рМу>+*Му = 0 A)
X Xz
в предположении, что показатели степени г\ и г2 = г\ — N этого уравнения отличаются
на целое число N ^ 0. Мы предполагаем, что мы уже нашли решение в виде обобщенного
степенного ряда
оо
> y1(x)=xri^anx" (a0^0) B9)
71=0
для х > 0, соответствующее большему показателю степени г\. Давайте писать Р{х) вместо
р(х)/х и Q{x) вместо q(x)/x2. Таким образом, мы можем переписать уравнение A) в форме
у" + Ру* + Qy = 0, что совпадает с уравнением B3).
Поскольку определяющее уравнение имеет корни г{ и г2 = т\ — N, его можно легко
разложить на множители:
г2 + (ро ~ l)r + qo = (г - r*i)(r - п + N) =
= г2 + (ЛГ - 2ri)r + (г? - nN) = 0,
8.4. Метод Фробениуса. Исключительные случаи 751
откуда мы видим, что
Ро-1 = ЛГ-2п;
иными словами,
-p0-2r1 = -l-N. C0)
Готовясь к использованию формулы понижения порядка B8), мы пишем
Р(х) = = — + pi + P2X Н .
X X
Тогда
expl -
так что
( - Р(х) dx 1 = ехр ( К Pi + Р2Х Н dx J
= ехр (-ро In х - р\х - \р2Х2 - • * •) =
= х~Ро ехр (-pix - \р2Х2 ) ,
ехр (- | Р(х) dx J = х"Р0 A + Агх + Л2х2 + •••).
C1)
На последнем шаге мы использовали тот факт, что композиция аналитических функций
является аналитической функцией и поэтому имеет представление в виде степенного ряда;
начальный коэффициент этого ряда в C1) равен 1, потому что е° = 1.
Мы теперь подставляем B9) и C1) в B8); полагая ао = 1 в B9), получим
I
х-ро (! + д1Х + д2Х2 + ...)
х2г* A + aix + а2х2 + • • • J
2/2 = 2/1 I ——т: о ГТ dx*
Теперь раскрываем скобки в знаменателе и упрощаем:
2/2 = У1 1 ■ р _ . р ^ , " dx =
1 + Bix + В2х2 +
= 2/1 |x--JV(l + Cix4-Ct2x2 + ---) dx.
C2)
(На последнем шаге мы как бы выполнили деление в столбик, т. е. записали результат
(частное) в том виде, в каком он получился бы в том случае, если бы мы выполнили такую же
процедуру, каую мы выполняем при делении на бумаге, когда выполняем деление с
выписыванием всех промежуточных шагов, и, кроме того, воспользовались равенством C0).) Мы
теперь рассмотрим отдельно случаи N = 0 и N > 0. Мы хотим установить общую форму
2/2, не следя за видом коэффициентов.
752 Глава 8. Методы степенных рядов
Случай 1: равные показатели степени (гх = гг). При N = 0 из равенства C2)
получаем
у2 = vi [ [I + d + С2х2 + • • J dx =
= yi lnx + 2/i (Cix 4- ^C2x2 H ) =
= yi lnz + xri A + aix + • • •) (Cix + \C2x2 + •••) =
= yi \nx + xri (b0# + hx2 + b2#3 Н ) •
Следовательно, в случае равных показателей степени общая форма решения у2 имеет вид
оо
> У2(х) = yi{x) \nx + x1+ri £bnxn- C3)
n=0
Обратите внимание на логарифмический член; он присутствует обязательно, если г\ = г2.
Случай 2: положительная целая разность (ri = ггЧ-JV). ПриЛГ > 0изравенстваC2)
имеем
2/2
= т [aT1_JV A + Схх + С2х2 + ■■■ + CNxN + ---)dx =
f (CN 1 d \ .
= m\(— + x^ + x^ + ---)dX =
„ , (x~N ClX-N+1 \
= С„у11пх + у1{— + -щт + ...) =
= CNV1 In* + xr>+N (JTanxA x~N (-1 4- -^ + ...),
так что
> V2{x) = CNVl(x) In x + xr* Y, bnxn, C4)
n=0
где&о = —cio/N ф 0. Это дает общую форму у2 в случае показателей степени, отличающихся
на положительное целое число. Обратите внимание на коэффициент Cn , который появляется
в C4), но не в C3). Если окажется, что См — 0, то логарифмического члена не будет; если
это так, то уравнение A) имеет второе решение в виде обобщенного степенного ряда (как
в примере 1).
В нашем выводе равенств C3) и C4), — он показывает общую форму второго решения
в случаях ri = г2 и г± — г2 = N > 0 соответственно, — мы не сказали ничего о радиусах
сходимости различных степенных рядов, которые встречались по ходу этого вывода.
Теорема 1 (следует ниже) представляет собой резюме предыдущего обсуждения и, кроме того,
устанавливает, где сходятся ряды в равенствах C3) и C4). Как и в теореме 1 из раздела 8.3,
мы ограничиваем наше внимание решениями для х > 0.
8.4. Метод Фробениуса. Исключительные случаи 753
Теорема 1
Исключительные случаи
Предположим, что х = О — регулярная особая точка уравнения
х2у" + хр{х)у' + q{x)y = 0.
Пусть р > 0 обозначает наименьший из радиусов сходимости степенных рядов
оо оо
Р(х) = ^РпХп и q(x) = ^2 QnXn.
n=0 n=0
Пусть ri и Г2 — корни (причем ri ^ гг) определяющего уравнения
г(г - 1) + Рог + до = 0.
(а) Если ri = гг, то уравнение D) имеет два решения у\ и у2 вида
D)
У1
(x)=xriJ2anxn (аоф0)
п=0
У2И = У\(х) 1пж + xri+1 ^ Ь„а;п.
C5а)
• C5Ь)
п—0
(Ь) Если г 1 — Г2 = N—положительное целое число, то уравнение D) имеет два решения
2/i и 2/2 вида
> yi(x)=xr>J2anxn («0^0) C6а)
п=0
И
У2(х) = СУ1(х)\пх + хГ2 J2 Ъпхп-
C6Ь)
п=0
В уравнении C6Ь) &о ф 0, но С может быть нулем или отличным от нуля, так что в этом
случае фактически логарифмический член может присутствовать или отсутствовать.
Радиусы сходимости всех степенных рядов в этой теореме по крайней мере не меньше, чем
р. Коэффициенты в этих рядах (и константа С в уравнении C6Ь)) могут быть определены
прямой подстановкой ряда в дифференциальное уравнение D). А
Пример 3
Чтобы проиллюстрировать случай ri = rs, мы найдем второе решение
уравнения Бесселя нулевого порядка
х2у" + ху' + х2у = 0, C7)
для которого ri = Г2 = 0. В примере 5 из раздела 8.3 мы нашли первое
решение
C8)
v-> (—1)пх2п
Уг(х) = Мх) = 22 22п(пП2 •
71=0 V *'
754 Глава 8. Методы степенных рядов
Согласно уравнению C5Ь) второе решение будет иметь вид
2/2 = yilnx + ^6nxn. C9)
п=1
Первые две производные функции у2 имеют вид
оо
п=1
y'i = у1Ых + У± -Ц + У]п(п- 1)Ьпхп-2.
х х1 *—i
п=2
Мы подставляем их в уравнение C7) и используем то, что Jo(x) также
удовлетворяет этому уравнению, в результате чего получаем
О = Х2У2 + ХуГ2 + Х22/2 =
= [ж2у? + ху[ + x22/i] In ж + 2ху[ +
оо сх> оо
+ Y,n(n- 1)Ьпхп + J2 пЬпхп + ^ Ъпхп+2,
п=2 п=1 п=1
из этого следует, что
0 = 2 £ ^ 92п /П2 + ^ + ^^ + Е^*» + *»-')*"• D0>
71=1 ^ ^П') 71=3
Единственный член в равенстве D0), содержащий х, есть Ь\х, так что
#1 = 0. Но п2Ъп + Ьп-2 = 0, если п нечетное, и из этого следует, что все
коэффициенты с нечетными индексами в уч обращаются в нуль.
Теперь мы исследуем коэффициенты с четными индексами в
равенстве D0). Сначала мы заметим, что
h о (-!)B) ! an
Для п ^ 2 из равенства D0) мы получаем рекуррентную формулу
Неоднородные рекуррентные формулы типа D2) типичны для
исключительных случаев метода Фробениуса; и их решение часто требует
маленькой изобретательности. Обычно стратегия зависит от обнаружения самой
заметной зависимости Ъ^п от п. Мы обращаем внимание на присутствие
22п(п!J в правой части равенства D2); учитывая также коэффициент
BпJ в левой части, все это заставляет нас думать о &2n как о чем-то,
8.4. Метод Фробениуса. Исключительные случаи 755
разделенном на 22п(п!J. Отмечая также чередование знаков, мы делаем'
подстановку
Ь2П ~ 22«(П!J • D3)
Мы просто ожидаем, что в результате этого рекуррентная формула для
С2п будет более простой, чем рекуррентная формула для fon • Мы выбрали
(—1)п+1,ане(—1)п, потому что 62 = \ > 0;прип = 1 в D3) мы получаем
С2 = 1. Подстановка D3) в D2) дает
(д ^2(-1)"+1С2п , (-l)"C2n-2 = (~2)(-2)"Bп)
У ' 22"(п!J 22"-2[(п -1)!]2 22"(п!J '
что сводится к чрезвычайно простой рекуррентной формуле
1
Таким образом,
С2п = С2п-2 +
П
1 , 1
С4 = с2 + - = 1 + -,
1,11
06 = 04 + - = ! + - + -,
1,111
C8 = C6 + i = ! + _ + _ + _
и так далее. Очевидно,
С2п = 1 + 5 + о + ••• + - = Яп, D4)
2 3 п
где через Яп мы обозначаем n-ю частичную сумму гармонического ряда
E(i/n).
Наконец, имея в виду, что все коэффициенты с нечетными индексами
равны нулю, мы подставляем D3) и D4) в C9) и получаем второе решение
сю
__^ ( —l)n+1iJ Х2п
У2{Х) = Jo(x) ЬХ + 22 22п(п!J
П=1
= J0(x)lnx+ — - — + -^- D5)
ov ; 4 128 13824 v ;
уравнения Бесселя нулевого порядка. Степенной ряд в D5) сходится для
всех х. Что касается других линейно независимых [от J0 (ж)] решений, то
из них чаще всего используется то, которое имеет вид
2 2
Y0(x) = -G - In2J/1 + -у2;
7Г 7Г
756 Глава 8. Методы степенных рядов
иными словами,
Пример 4
Y0(x) =
G + ln|) Jo(x) + 2
П=1
{-\)п+1Нпх2п
22"(п!J
где 7 обозначает константу Эйлера:
7 = lim (Я„ - Inn) и 0,57722.
D6)
D7)
Эта конкретная комбинация Yq{x) выбрана из-за ее хорошего поведения
при х —> +оо; ее называют функцией Бесселя нулевого порядка
второго рода. ■
Метод, альтернативый к методу подстановки, мы проиллюстрируем в
случае г\ — Г2 = N, используя метод понижения порядка для получения
второго решения уравнения Бесселя порядка 1:
х2у" + хуг + (х2 - 1I/ = 0, D8)
соответствующее определяющее уравнение которого имеет корни г i = 1
иг2 = — 1.Согласнозадаче39израздела8.3,однорешениеуравненияD8)
имеет вид
ПгуЛП
n=0 v
X X3 X5
!(п + 1)! 2 16 + 384 18432
+ ■
D9)
ПриР(х) = 1/х с учетом равенства D8) формула понижения
порядка B8) дает
2/2 = 2/1 | о
ху\
J xy\
dx =
Ш J x(x/2 - х3/1б + х5/384 - х7
/18432+•••J
dx =
dx =
3A - х2/8 + х4/192 - х6/921б + • • •)
1
42/1 J х3A - х2/4 + 5х4/192 - 7х6/4608 + • • •)
, Г 1 / х2 7х4 19х6 \ _,
= Ч^A + Т+192 + 4608 + ";j^ =
„ f / 1 1 7х 19ж3 \ _,
= 42/1JU + ^+192 + 4608+-Jda; =
Л ( \ 7х2 19х4 \
= J/llna; + 4y4"^ + 384 + i8432 + -'-J-
dx =
8.4. Метод Фробениуса. Исключительные случаи 757
Таким образом,
(v / \ 1 Л. л. JU
*)=У1(*Iп*-- + - + ^- —
+ ■
E0)
Заметьте, что метод понижения порядка позволяет легко вычислить
первые несколько членов ряда, но не позволяет получить рекуррентную
формулу, которая может использоваться для вычисления общего члена ряда.
При выполнении вычислений, подобных проведенным в примере 3
(но более сложных—см. задачу 21), метод подстановки помогает получить
решение
Уз
(x)=yi(x)lnx-- + ]T
п=1
(-l)"(ffn+ ffn_i)s:
22nn!(n-l)!
,2n-l
E1)
где Нп определено в D4) для п ^ 1; Щ = 0. Читатель может
проверить, что члены, выписанные в равенстве E0), совпадают с теми, которые
получились бы из разложения в ряд
2/2 (ж) = -Ji(x) + y3(x).
E2)
Чаще всего используется линейно независимая [от J{\ следующая
комбинация решений уравнения Бесселя порядка 1:
Yi(x) = -G - 1п2Ыж) + -2/3(ж)
7Г 7Г
2
7Г
(T + h 2) *<*)-£ + £ 2»»nK»-l)l
П=1
E3)
Примеры 3 и 4 иллюстрируют два метода нахождения решений в логарифмических
случаях — прямой подстановкой и понижением порядка. Третий альтернативный метод
кратко очерчен в задаче 19.
В задачах 1-8 примените метод из примера 1 и найдите два линейно независимых решения в виде
обобщенного степенного ряда или найдите одно такое решение и покажите (как в примере 2),
что больше решений такого типа не существует.
1. ху" + C - х)у' -у = 0
3. ху" + E + Ъх)у' + Зу = 0
5. ху" - D + х)у' + Зу = 0
7. х2у" + Bх + Зх2)у' -2у = 0
2. ху" + E - х)у' - у = 0
4. Ьху" + C0 + Зх)у' + Зу = 0
6. 2ху".-F + 2х)у' + у = 0
8. х{1 - х)у" - Зу' + 2у = 0
В задачах 9-14 сначала найдите первые четыре отличных от нуля члена решения данного
дифференциального уравнения в виде обобщенного степенного ряда. Затем используйте метод
понижения порядка (как в примере 4) и найдите логарифмический член и первые три отличных от нуля
члена второго линейно независимого решения.
758 Глава 8. Методы степенных рядов
9. ху1' + у1 - ху = О 10. х2у" - ху' + (х2 4- 1)у - О
Ц. а V + (ж2 - ЗжУ + 42/ = 0 12. х2у" + хУ - 2у = О
13. х2у" + Bх2 - Зх)у' + Ъу = 0 14. х2у" + хA + х)у' - 4у = О
15. В этой задаче сначала воспользуйтесь тем, что
2 4 6
Используя метод понижения порядка, получите второе линейно независимое решение
х) = Мх)Ых+т- — + 1з284"---
уравнения Бесселя нулевого порядка.
16. Найдите два линейно независимых решения уравнения Бесселя порядка §
ж 2/ + Х2/ 4- (х - |J/ = 0
в виде обобщенного степенного ряда.
17. (а) Проверьте, что у\{х) = хеж — одно из решений уравнения
х2у" — хA + х)у + у = 0.
(b) Обратите внимание, что п = г2 = 1. Подставьте
оо
2/2 = 2/i In х + ^ Цхп+1
n=l '
в дифференциальное уравнение и выведите, что Ь\ = — 1 и что
га&п — &n-i = г Для п - 2.
(c) Подставьте Ьп = сп/п\ в эту рекуррентную формулу и на основании полученного равенства
заключите, что сп = —Нп- Таким образом, второе решение имеет вид
о© „ п+1
2/2 (х) = хе In х — > j .
п.
п=1
18. Рассмотрим уравнение ху" — у = 0, которое имеет показатели степени r'i = 1 и гг = 0 в точке
х = 0. (а) Получите решение в виде обобщенного степенного ряда
2/1
(*) = £
^ п!(п-1)Г
п=1 ч '
(Ь) Подставьте
, °°
2/2 = Cyi In x + ]Р fenxn
n=0
в уравнение ху" — у = 0 и получите рекуррентную формулу
п(п 4- 1)&п+1 — Ьп = — т—ГТ^1—Г^-
(п+1)!п!
На основании этого заключите, что второе решение имеет вид
У2{Х)=У1(х)\пХ+1-У—Г — X .
п=1 ' I v '
8.4. Метод Фробениуса. Исключительные случаи 759
19. Предположим, что дифференциальное уравнение
Ь[у] = х2у" + хр{х)у + q(x)y = 0 E4)
имеет равные показатели степени п = Г2 в регулярной особой точке х = 0, так что его
определяющее уравнение имеет вид
ф(г) = (г- пJ = 0.
Положите со = 1 и определите Сп(г) для п ^ 1, используя уравнение (9); т. е.
ш ^(псосг сп-г)
ф{г + п)
Затем определите функцию у(х, г) от ж и г так:
оо
y(a;1r) = ^ctl(r)a;n+r. E6)
п=0
(а) Выведите из предыдущего обсуждения уравнения (9), что
L[y(x,r)]=xr(r-r1J. E7)
Затем выведите, что
оо
yi = у(х, n) = Y, Сгг(п)хп+Г1 E8)
п=0
— одно из решений уравнения E4). (Ь) Продифференцируйте уравнение E7) по г и покажите,
что
L[yr(x,n)] = — [xr(r - пJ]
д г г/ ч2"
Г=Г1
#Г
= 0.
Выведите, что 2/2 = 2/r(x,ri) — второе решение уравнения E4). (с) Продифференцируйте
уравнение E8) по г и покажите, что
оо
2/2 = 2/i In я 4- xri ]T cn(ri)xn. E9)
n=l
20. Используя метод задачи 19, получите оба решения C8) и D5) уравнения Бесселя нулевого
порядка. Следующие шаги намечают план этого вычисления, (а) Положите со = 1; покажите,
что уравнение E5) приводит в этом случае к равенствам
(r+lJci(r) = 0 и
(Ь) Затем покажите, что ci@) = ci@) = 0 и после этого выведите из F0), что сп@) = с'п@) =
= 0 для нечетных п. Следовательно, вы должны вычислить сп @) и с'п @) только для четных
п. (с) выведите из F0), что
(-1)п
C2n(r) = (r + 2J(r + 4J...(r + 2nJ' F1)
Положив г = п = 0 в E8), получим Jo(x). (d) Дифференцируя F1), покажите, что
; to) (~Уп+1нп
°»nW- 22«(n!J '
Подстановка этого результата в E9) дает второе решение D5).
760 Глава 8. Методы степенных рядов
21. Получите логарифмическое решение E1) уравнения Бесселя порядка 1 методом подстановки.
Следующие шаги намечают план этого вычисления, (а) Подставьте
yi = CJi(x) ]лх + я-1 ( 1 + 5Z ЬпхП )
в уравнение Бесселя и получите
оо
-bi + х + ]Г[(п2 - 1Nп+1 + bn-i]xn +
(-l)nBn+l)s2n+1
+ С
ж + 2-; 22"(h+l)!n!
n=l v '
= 0. F2)
(b) Выведите из уравнения F2), что С = — 1 и что 6П = 0 для нечетных п. (с) Затем выведите
рекуррентную формулу
[(я» + D2 -1] W + ъ2п = j^f^ F3)
для п ^ 1. Обратите внимание, что если выбрать произвольно &2, то bin будет определено для
всех п > 1. (d) Положите 62 = ^ и подставьте
, = (-1Гс2п
2n 22"(п-1)!п!
в уравнение F3) и получите
1 _,_ 1
С2п+2 — С2п = — Н •
П+ 1 П
(е) Обратите внимание на то, что сг = 1 = Н\ + Но и выведите, что
С2п = Нп + Нп-1.
8.4. Приложение. Понижение порядка
в исключительном случае
Здесь мы иллюстрируем использование системы компьютерной алгебры, такой как
Mathematical для применения формулы понижения порядка уравнения B8) из этого раздела.
Однако формула понижения порядка может быть полезна не только при применении таких
приложений, как Maple, Mathematica и MATLAB, но и многих других. Чтобы
проиллюстрировать метод, мы получим второе решение уравнения Бесселя нулевого порядка, начав
с известного разложения решения
оо 2п
n=0 v '
2п
~2'
в степенной ряд, который мы вводим в систему вот так:
yl = Sum[((-хА2/4)Ап) / (п!)А2, {п, 0, 5}] + 0[х]А12
8.5. Уравнение Бесселя 761
Затем, полагая
Р = 1/х;
остается только выполнить подстановку в интеграл в уравнении B8):
integral = Integrate! Exp[ -Integrate[P,x]]/ylA2, x ]
x
5x4 23x6 677x8 7313x10
log(z) + — + ^- + ^^- + Л!_1^ j_ tVJ-v^ 1- 0(x12)
8U 4 128 3456 589824 36864000 V ;
Затем отдельно умножаем JO = у 1 и остальные члены ряда на логарифм, т. е. выполняем
вычисление
у2 = J0*Log[x] + yl*(integral - Log[x])
что приводит нас к второму решению
т / \ ■, / \ X OX JLJLX ZoX LolX х_/ io\
Jo(x) log(x) + T - ш + 1зз24 " 1769472 + 884736000 + °{x }
уравнения Бесселя нулевого порядка (мы выписали его в равенстве D5) в тексте).
. После проверки (с помощью вашей системы компьютерной алгебры) представленного
здесь вычисления вы можете начать со степенного ряда для J\ (x) в уравнении D9) из этого
раздела и получить подобным образом второе решение E0) уравнения Бесселя порядка 1.
Этим способом можно также частично автоматизировать решение задач 9-14.
8.5. Уравнение Бесселя
Мы уже рассмотрели несколько случаев уравнения Бесселя порядка р ^ 0,
> х2у" + хуГ + (х2 - р2)у = 0. A)
Его решения теперь называются функциями Бесселя порядка р. Такие функции сначала
появились в 1730-х годах в работе Даниила Бернулли и Леонарда Эйлера, посвященной
колебаниям вертикально подвешенной цепи. Само уравнение появилось в 1764 году в статье
Эйлера, посвященной колебаниям круглого диска (например из барабанной кожи), а Фурье
использовал функции Бесселя в его классическом трактате, посвященном теплоте A822).
Но их общие свойства были сначала изучены систематически в 1824 году в статье немецкого
астрономома и математика Фридриха Вильгельма Бесселя A784-1846), который
исследовал движение планет. Стандартный источник информации о функциях Бесселя — трактат
Джона Невилла Ватсона, посвященный теории функций Бесселя, 2-е издание которого
вышло в Кембридже в издательстве Кембриджского университета в 1944 году (G. N. Watson.
A Treatise on the Theory ofBessel Functionsy 2nd ed. (Cambridge: Cambridge University Press,
1944)M. Его 36 страниц ссылок, которые охватывают только период до 1922 года, дают
некоторое представление об обширной литературе по этой теме.
* Есть перевод: Теория бесселевых функций, ч. 1-2, М, 1949. — Примеч. ред.
762 Глава 8. Методы степенных рядов
Уравнение Бесселя A) имеет определяющее уравнение г2 — р2 = 0, корни которого равны
г = ±р. Если подставить у = Yl crnxrn+r в уравнение A), мы обычным способом найдем,
что с\ = 0 и что
> [(т + гJ-р2]сш + сш_2 = 0 ' B)
для m ^ 2. Проверку уравнения B) оставляем читателю (задача 6).
Случай г = р > О
Если мы положим г = р и напишем ат вместо ст, то уравнение B) даст рекуррентную
формулу
- а—2 C)
тBр + га)
Поскольку а\ = 0, из этого следует, что ат = 0 для всех нечетных значений га. Вот первые
несколько коэффициентов с четными индексами:
а2 = -
0,4 = —
а>б
2Bр + 2) 22(р+1)'
а>2 у ао
4Bр + 4) 24-2(р+1)(р + 2)'
оц ао
Общая формула:
6Bр + 6) 26.2.3(р+1)(р + 2)(р + 3)'
(-1)та0
^2т =
22шт| (р + ^(р + 2)... (р + т)'
так что для большего корня г —р мы получаем решение
У1(х) = ао JJ 22шш!(р+1)(р + 2)...(р + т)-
D)
Если р — 0, это будет единственное решение в виде обобщенного степенного ряда; при
ао = 1, это функция Jo(x)9 с которой мы уже немного знакомы.
Случай г = -р < О
Если подставить г = — р и написать Ьш вместо ст, уравнение B) примет вид
> т(т - 2р)Ьт + Ьт-2 — 0 E)
для т ^ 2, тогда как bi = 0. Мы видим, что есть потенциальная трудность, если окажется,
что 2р — положительное целое число, т. е. если р является положительным целым числом
или нечетным положительным кратным |. Тогда при т = 2р уравнение E) будет выглядеть
просто вот так: 0 • Ьт + Ьт_2 = 0. Таким образом, если Ьш_2 ф 0, то никакое значение Ьш
не может удовлетворить это уравнение.
8.5. Уравнение Бесселя 763
Но если р является нечетным положительным кратным \9 мы можем обойти эту
трудность. Предположим, чтор = к/2, где к—положительное нечетное число. Тогда необходимо
только выбрать bm = О для всех нечетных значений т. Критическим шагом является А>й,
к(к - к)Ък + Ък-2 = 0.
И это равенство будет выполняться потому, что Ък = Ък-2 = Л
Следовательно, если р не равно положительному целому числу, мы полагаем Ьш = 0
для нечетных т и определяем коэффициенты с четными индексами через bo с помощью
рекуррентной формулы
Ьт~2 ш^2. F)
т т(т — 2р)'
Сравнивая F) с C), мы видим, что F) приведет к тому же самому результату, что и D), если
не считать того, что р нужно заменить на —р. Таким образом, в этом случае мы получаем
второе решение
> У2(х) = bo JL 22тт\ (-р + 1)(-р + 2) • • • (-р + т) ■ G)
Ряды в равенствах D) и G) сходятся для всех х > 0, потому что х = 0 — единственная
особая точка уравнения Бесселя. Если р > 0, то ведущий член в у\ имеет вид аохр9 тогда как
ведущий член в у2 принимает вид Ьох~р. Следовательно, у{@) = 0, но У2(х) —> ±оо при
х —» 0, так что ясно, что у\ и у2 являются линейно независимыми решениями уравнения
Бесселя порядка р > 0.
Гамма-функция
Формулы D) и G) можно упростить с помощью гамма-функции Г (ж), которая определена
длях > 0 равенством
Г(х) = Г
J0
е~Чх-1 dt. (8)
Нетрудно показать, что этот несобственный интеграл сходится для каждого х > 0. Гамма-
функция — обобщение для х > 0 функции факториал (факториального многочлена) п!,
которая определена только если п — неотрицательное целое число. Чтобы понять, почему
Г(х) является обобщением п\, сначала мы обратим внимание на то, что
Г°
ГA) =
Jo
г ,Ь
е zdt= lim
b—►oo
-e-'l =1.( (9)
JO
Затем мы интегрируем по частям (полагая и = tx и dv = е * dt):
Г(х + 1)= lim f е-*1?&= lim ( f-e^HV f xe'H*'1 dt) =
b-+oo J0 b—oo у L J 0 J0 J
= x( lim I e-H^dt J ;
764 Глава 8. Методы степенных рядов
иными словами,
>
Г(ж + 1) = жГ(ж).
A0)
Это самое важное свойство гамма-функции.
Если мы объединим равенства (9) и A0), мы увидим, что
ГB) = 1 • ГA) = 1!, ГC) = 2 • ТB) = 2!, ГD) = 3 • ГC) = 3!
и вообще что
> Г(п + 1) = п! для любого целого числа п ^ 0.
Вот важное частное значение гамма-функции:
рОО рОО
Г (|) = е~Н-1/2 Л = 2 е~и2 du = 0F,
Jo Jo i
где мы подставили и2 вместо t в первом интеграле; то, что
(П)
A2)
Г
Jo
du
2
хорошо известно, но совсем не очевидно.
Хотя Г (х) определена равенством (8) только для х > 0, с помощью рекуррентной
формулы A0) можно определить Г (х) для всех х, отличных рт нуля и отрицательных целых чисел.
Если — 1 < х < 0, то
правая часть определена потому, что 0<х+1<1.Таже самая формула может
использоваться, чтобы продолжить так определенную функцию Г(х) на открый интервал (—2,-1),
затем на открытый интервал (—3, —2) и т. д. График гамма-функции, продленной таким
образом, показан на рис. 8.5.1. Студент, который хотел бы продолжать исследовать эту
очаровательную тему, должен обратиться за справкой к книге Артина (Artin) The Gamma Function
(New York: Holt, Rinehart and Winston, 1964). Эта книга, изданная в Нью-Йорке в 1964
году издательством Holt, Rinehart and Winston, целиком посвящена гамма-функции. Только
39 страниц, но это одно из самых прекрасных описаний во всей литературе по математике.
ю
• U"
'^^■а„,«.,анга»|-»"''"'"<'
4 х
Рис. 8.5.1. График
продолжения гамма-функции
8.5. Уравнение Бесселя 765
Функции Бесселя первого рода
Если положить ао = 1/[2рГ(р + 1)] в D), где р > О, и обратить внимание, что
Г(р + т + 1) = (р + m)(p + m - 1) • • • (р + 2)(р + 1)Г(р + 1),
то повторным применением равенства A0) мы сможем записать функцию Бесселя первого
рода порядка р очень кратко с помощью гамма-функции:
М*) = ± J~ir Л?Г+Р- (»)
^Ч т!Г(р + m + 1) V2/ v '
т=0 v 7
Точно так же, еслир > 0 не равно целому числу, мы полагаем bo = 1/[2~*Т(— р + 1)] в G)
и получаем линейно независимое второе решение
_Е2- (—1)т /Г\2т-р
^м = Ета,ГAр']т+1)A) о*)
(-1)ш /х\2™-р
т\Г(
га=0
уравнения Бесселя порядка р. Если р не равно целому числу, мы имеем общее решение
у(х) = с\ Jp(x) + c2J-p(x) A5)
дляж > 0;причемж^нужнозаменитьна|х|рвуравненияхA3)-A5),чтобыполучитьточные
решения для х < 0.
Еслир = п, неотрицательному целому числу, то из уравнения A3) имеем
-S2. ( — \}т /r\2m+n
•tow - 2^ 22m(m!J ~ 22+22-42 22-42-62+'" ( }
m=0
для функций Бесселя первого рода целого порядка. Таким образом,
(-1)тх2т _ 1 х2 t х4 хв
га=0
И
JlW- Z^o^+imKm + l)! ~2 2! Ы + 2! • 3! Ы '"' 1;
т=0
Графики функций Jo (ж) и Ji(x) показаны на рис. 8.5.2. Общим видом они напоминают
затухающие колебания по закону косинуса и синуса соответственно (см. задачу 27). И
действительно, если исследовать ряд в A7), можно заметить (хотя бы частично) причину, по
которой Jo (x) и cos x могли бы быть подобны — нужны только незначительные изменения
в знаменателях в формуле A7), чтобы получить ряд Тейлора для cos x. Как и показано на
рис. 8.5.2, нули функций Jo(x) и J\ (x) разделены — между любыми двумя
последовательными нулями Jo (ж) есть точно один нуль J\ (x) (задача 26) и наоборот. Первые четыре нуля
Jo(x) приблизительно равны 2,4048,5,5201,8,6537 и 11,7915. Для больших п n-й нуль
функции J0(х) приблизительно равен (п — |) 7г; п-ц нуль функции J\(x) приблизительно равен
(п + \) 7г. Таким образом, интервал между последовательными нулями Jq(x) или J\(x)
766
Глава 8. Методы степенных рядов
Рис. 8.5.2. Графики функций Бесселя Jo 0*0
и J\(x)
п
1
2
3
4
5
n-й нуль
функции Jo(m)
2,4048
5,5201
8,6537
11,7915
14,9309
\(*-Ц)*
2,3562
5,4978
8,6394
11,7810
14,9226
функции Ji(x)
3,8317
7,0156
10,1735
13,3237
16,4706
',::(п:+Й*
1
3,9270
7,0686
10,2102
13,3518
16,4934
Рис. 8.5.3. Нули функций Jo (x) и J\ (x)
приблизительно равен 7г — еще одно сходство с cos x и sin x. Округляя данные в таблице на
рис. 8.5.3 к двум десятичным знакам, можно заметить, как точность этих аппроксимаций
увеличивается с увеличением п.
Оказывается, что Jp(x) — элементарная функция, если порядокр равен половине
нечетного целого числа. Например, после подстановки р = ^ и р = — | в уравнения A3) и A4)
соответственно результаты могут быть идентифицированы (задача 2) с функциями
Ji
J— sinx и .7-1/2.0*0 = \/ —
V 7ГХ ' V 7ГЖ
i/2(*) = \/— sbx
cosx.
A9)
Функции Бесселя второго рода
Второе линейно независимое решение целого порядка можно найти с помощью методов
раздела 8.4. Очень сложное обобщение примера 3 из упомянутого раздела дает формулу
^ / ч 2 / , х\ т , ч 1^4 2пт(п - т - 1)!
YJx) = - G + In - ) Jn(x) > ^ ^ '-
т=0
1 °°
(-1)т(Ят + Ят+п) /ХХП+2т
т=0
т! (га + п)!
A)
B0)
8.5. Уравнение Бесселя 767
в используемой там системе обозначений. Если п = О, то первая сумма в B0) полагается
равной нулю. Здесь Yn{x) называют функцией Бесселя второго рода целого порядка
Общее решение уравнения Бесселя целого порядка п имеет вид
> .v(x).^cMz)+&Yn(x)+ B1)
Важно обратить внимание на то, что Yn{x) —►" —ею при х —► 0 (рис. 8.5.4). Следовательно,
С2 = 0 в уравнении B1), если у(х) непрерывна в точке х = 0. Таким образом, если у (х) —
непрерывное решение уравнения Бесселя порядка п, то
y{x)-cJn{x)
для некоторой константы с. Поскольку Jo@) = 1, мы видим, кроме того, что если п = 0,
то с = 2/@), В разделе 10,4 мы ущцшм, чтх> этот отдельны^ фащ q функциях Бесселя имеет
многочисленные физические приложения.
у
Го(*) Ж*>
Рис. 8.5.4. Графики функций Бесселя Yq(x)
Из рис. 8.5.5 видно, что для п > 1 графики Jn{x) и Yn(x) выглядят, вообще говоря,
подобно графикам J\ (х) и Y\ (х). В частности, Jn@) = 0 в то время, как Yn(x) —► — ос при
ж —► 0+, и графики обеих функций напоминают Затухающие колебания при х —► +оо.
0.5 Ь
-0.5 Ь
Рис. 8.5.5. Графики функций Бесселя 7г(х)
иВД
Тождества для функций Бесселя
Функции Бесселя походят на тригонометрические функции в том, что они удовлетворяют
большому количеству стандартных весьма часто используемых тождеств, особенно при
768 Глава 8. Методы степенных рядов
вычислении интегралов, содержащих функции Бесселя. Дифференцирование функции
00 (-1)т (х\2™>+р
т=0
при условии, что р равно неотрицательному целому числу, дает формулу
. оо
•w-Esn^uGr-
d d ^ /_i\mx2m+2p
— [хР Jp(x)] = -^2-s <?2m+Prri) (n 4- ™
n
oo
dx L* "rwi dx Z-, 22™+Pm\ (p + то)!
( —l)mX2m+2p_1
m=0
22m+p-lml (p + ш _ J)!
_Ж ^22^+P-1m!(p + rn-l)!'
ra=0 vr^ '
и, таким образом, мы показали, что
-^[xpJp(x)]=xpJp-1(x). B2)
ах
Точно так же можно доказать, что
^ [x~pJp(x)} = -z"%+i(x). B3)
Если мы выполним дифференцирование тождеств B2) и B3) и затем разделим полученные
тождества на хр и х~р соответственно, мы получим (задача 8) тождества
Jp(x) = Jp-1(x)-^Jp(x) B4)
и
j;(x) = |'Jp(x)-Jp+1(x). B5)
Таким образом, мы можем выразить производные функций Бесселя опять же через функции
Бесселя. Вычитание тождества B5) из тождества B4) дает рекуррентную формулу
2р
Jp+i(aO = —Jp(x) - Jp-i(z), B6)
которая может использоваться для того, чтобы выразить функции Бесселя высоких порядков
через функции Бесселя более низких порядков. Формула
Jp-i(ff) = — Jp(x) - Jp+i(x), B7)
может использоваться для того, чтобы выразить функции Бесселя большого (по
абсолютной величине) отрицательного порядка через функции Бесселя меньших (по абсолютной
величине) отрицательных порядков.
Тождества B2)-B7) справедливы всегда, когда они имеют смысл, т. е. всегда, когда не
появляются функции Бесселя отрицательного целого порядка. В частности, они справедливы
для всех нецелых значений р.
8.5. Уравнение Бесселя 769
Пример 1
Полагая р = 0 в тождестве B2), получаем
a: Jo (a:) dx = xJi(x) + С.
Точно так же полагая р = О в тождестве B3), получим
J!(x)dx = -J0(x)+C.
Пример 2
Полагая сначалар = 2, а затем р = 1 в тождестве B6), мы получаем
'2
4 4
J3(#) = -Л(я) - J\{x) = -
а; а:
:Ji(x) - Jo (a:)
- Ji(ar),
так что
J3(x) == —J0(a:) +
A-0л<
i).
Пример 3
С помощью подобных манипуляций каждая функция Бесселя
положительного целого порядка может быть выражена через Jo (x) и J\ (x). ■
Чтобы проинтегрировать ("антидифференцировать", т. е. взять
неопределенный интеграл) х J2 (х), мы сначала обращаем внимание на то, что
x~1J2(x)dx = -х~г^(х)'+С
согласно тождеству B3) при р = 1. Поэтому мы пишем
xJ2(x)dx = х2 [х~г^(х)] dx
и интегрируем по частям, полагая
и = a:2, dv = х~г J2(x) dx,
du = 2xdx и v = — a;-1 Ji(ar).
Это дает
a:J2(a:) da: = —a:Ji(a:) + 2 Ji(a:) da: = —a:Ji(a:) — 2 Jo (a:) + C,
с учетом второго результата примера 1. ■
Параметрическое уравнение Бесселя
Параметрическое уравнение Бесселя порядка п имеет вид
> х2у" + ху' + (а2х2 - п2)у = 0, B8)
770 Глава 8. Методы степенных рядов
где а — положительный параметр. Как мы увидим в главе 10, это уравнение появляется
в решении уравнения Лапласа в полярных координатах. Легко видеть (задача 9), что замена
t = ах преобразует уравнение B8) в (стандартное) уравнение Бесселя
'S+^-v
о,
B9)
имеющее общее решение y(t) = с\ Jn (t) + с^Уп (t). Следовательно, общее решение
уравнения B8) имеет вид
у(х) = ci Jn(ax) + c2Yn(ax).
Теперь рассмотрим задачу на собственные значения
ж V + ху' + (л#2 ~ п2) = 0,
y(L) = 0
C0)
C1)
на интервале [0, L]. Мы ищем положительные значения А, для которых существует
нетривиальное решение задачи C1), которое непрерывно на интервале [0, L]. Если мы обозначим
А = а2, то дифференциальное уравнение C1) примет вид уравнения B8), так что его общее
решение дается равенством C0). Поскольку Уп(х) —► —оо при х —► 0, но Jn@) конечно,
из непрерывности у(х) следует, что С2 = 0. Таким образом, у(х) = с\ Jn(ax). Из условия
в конечной точке у{Ь) = 0 теперь следует, что z = aL должно быть (положительным)
корнем уравнения
Jn(z) = 0.
C2)
При п> Un (х) колеблется подобно тому, как это изображено для J\ (x) на рис. 8.5.2 и, сле-
довательно, имеет бесконечную последовательность положительныхнулеЙ7пь7п297пз9 • • •
(рис. 8.5.6). Из этого следует, что fc-e положительное собственное значение задачи C1) может
быть выражено по формуле
Хк = (акJ =
ЫкJ
L2
и что соответствующая ему собственная функция равна
ук(х) = Jn (-y^) •
C3)
C4)
у = ВД
Рис. 8.5.6. Положительныенули7пъ7п2>7пз. • ■ •
функции Бесселя Jn (x)
8.5. Уравнение Бесселя 771
Корни 7п& уравнения C2) для п й 8 и к ^ 20 приведены в таблице 9.5 известного
справочника по специальным функциям М. Абрамовица и И. Стиган, изданного в Нью-Йорке
в 1965 году (М. Abramowitz and LA. Stegun, Handbook of Mathematical Functions (New York:
Dover, 1965)).
1. Продифференцируйте почленно ряд для Jo(x) и покажите непосредственно, что Jq{x) = —
—J\ (х) (еще одна аналогия с функциями косинус и синус).
2. (а) Выведите из равенств A0) и A2) формулу
r(n+a = 1352!2n-V.
(b) Используя результат части (а), проверьте формулы в равенстве A9) для Ji/2 (x) и J_i/2(^)
и начертите графики этих функций.
3. (а) Пусть т — положительное целое число. Покажите, что
r(»+J)-^bd^r(i).
(b) Выведите из части (а) и равенства A3), что
1/3( ' " ~Щ~ { h 22™m!.2.5...Cm-l)J '
4. Примените равенства A9), B6) и B7) и покажите, что
Л/2 (#) = \ о (sin X — X COS X)
7 V 7Г#3
J-3/2(x) = -J—- (cosx + zsina;).
Начертите графики этих двух функций.
5. Выразите J±{x) через Jo (ж) и J\{x).
6. Получите рекуррентную формулу B) для уравнения Бесселя.
7. Проверьте тождество B3) почленным дифференцированием.
8. Выведите тождества B4) и B5) из тождеств B2) и B3).
9. Проверьте, что подстановка t = ах преобразует параметрическое уравнение Бесселя B8)
в уравнение B9).
10. Покажите, что
Up (х) = Jp-2(x) - 2Jp(x) + JP+2(x).
11. С помощью соотношения Г(х + 1) = хГ(х) выведите из равенств A3) и A4), что если р не
равно отрицательному целому числу, то
М^-^-
Г(р+1)
1 + Е
(-1Г(»/2)
2т
^ т\ (р + 1)(р + 2) • • • (р + т)
Эта формула более удобна для вычисления Jp(x)9 потому что требуется только единственное
значение Г(р + I) гамма-функции.
772 Глава 8. Методы степенных рядов
12. Используя ряд из задачи 11, найдите у@) = lim у(х) при условии, что
(я?) = х2
J5/2(aQ + J-5/a(aO'
Л/2 0*0 + «7-1/2 0*0,
Используйте систему компьютерной алгебры, чтобы начертить график у(х) для х в окрестности
0. Подтверждает ли график ваше значение г/@)?
Любой интеграл вида ^xrnJn(x)dx моэюет быть выраэюен через функции Бесселя и
неопределенный интеграл J Jo(x)dx. Последний интеграл не моэюет быть упрощен далее, но значения
функции Jq Jo(£) dt приведены в таблице 11.1 справочника по специальным функциям М. Абрамо-
вица и И. Стиган. Используйте тождества B2) и B3), чтобы найти интегралы в задачах 13-21.
13. x2Jo(x)dx
х Jo (x) dx
х J\{x)dx
15.
17.
19.
J*
J\ (x) dx
14. x3Jo(x)dx
xJi(x)dx
x J\ (x) dx
J2(x)dx
16.
18.
20,
21. f J3(x)dx
22. Докажите, что
Jo(x) = -
7Г
cos (x sin 0) dO,
показав, что правая часть удовлетворяет уравнению Бесселя нулевого порядка и ее значение
равно Jo@) при х = 0. Объясните, почему это и есть доказательство.
23. Докажите, что
1 Г
Л (х) = — cos@ — х sin в) dO,
к Jo
показав, что правая часть удовлетворяет уравнению Бесселя порядка 1 и что ее производная
имеет значение J{ @) при х = 0. Объясните, почему это и есть доказательство.
24. Можно показать, что
1 Г
Jn(x) = — cos(n0 — xsin0) dQ.
n Jo
Покажите, что при п ^ 2 правая часть удовлетворяет уравнению Бесселя порядка п и ее
значения также согласуются со значениями Jn@) и Jn@). Объясните, почему этого недостаточно,
чтобы доказать предыдущее утверждение.
25. Из результата задачи 22 выведите, что
Г2тг
Jo(x) = -
(Указание. Сначала покажите, что
Г2тг
eixsin9de=z f
га; sin 0 , — га; sin 0
е 4-е
) М;
затем используйте формулу Эйлера.)
26. С помощью тождеств B2) и B3) и теоремы Ролля докажите, что между любыми двумя
последовательными нулями Jn(x) есть точно один нуль Jn+i(x). Используйте систему компьютерной
алгебры, чтобы создать рисунок, иллюстрирующий этот факт для п = 10 (например).
8.6, Приложения функций Бесселя 773
27. (а) Покажите, что подставив у — x^x^2zb уравнение Бесселя порядка р,
х2у" + ху + (ж2 - р2)у = О,
получим
z" + I 1 - ^r1 U = 0.
(b) Если х является настолько большим, что величина (р2 — \) /х2 столь незначительна, что
ею можно пренебречь, то последнее уравнение можно упростить так: / + 2й 0. Объясните
(без доказательства), почему из этого можно предположить, что если у(х) является решением
уравнения БесселЯ, то
у{х)ых 1/2(Acosx + J5sinx)
= Сх~х'2 cos(x — at)
для некоторых констант С и а при больших х.
C5)
Асимптотические приближения
Известно, что если в C5) выбрать С = ^/2/7г и а = Bп + 1Oг/4, то получится наилучшее
приближение Jn(x) для больших х:
Точно так же
В частности,
C6)
C7)
Jn(x) «у — cos [х - \{2п + 1Oг) .
Уп(ж) * v5sin (х " *Bп + 1Oг)'
/ 2
, Jo(x) « \/ COS (х — т7г)
1 V 7Га? v 4 '
и (
уо(я?)«у —вш(я?-^7г),
если х является достаточно большим. Это действительно асимптотические приблиоюения в том
смысле, что отношение этих двух величин, стоящих в левой и правой части каждого приближения,
стремится к единице при х —» +оо.
8.6. Приложения функций Бесселя
Важность функций Бесселя обусловлена не только частым появлением уравнения Бесселя
в приложениях, но также и тем, что решения многих других линейных дифференциальных
уравнений второго порядка могут быть выражены через функции Бесселя. Чтобы увидеть,
как они появляются, мы начнем с уравнения Бесселя порядка р в форме
od2w dw , о оч
dzz dz
о)
774 Глава 8. Методы степенных рядов
и подставим сюда
w = х~ау, z = кх&.
Тогда рутинное (но длинное) преобразование уравнения A) дает
а?у» + A - 2а)ху' + (а2 - /32р2 + р2к2х2?)у = 0;
иными словами,
> х2у" + Асу' + (В + Cxq)y = 0,
где константы А, В, С и q определяются равенствами
А = 1-2а, £ = а2-/?У, С = C2к2 и g = 2/?.
Решить уравнения D) совсем несложно, из них мы найдем
а =
к
1-А
2 '
2у/С
>-i
V(i - ay - \в
B)
C)
D)
E)
Если предположить, что квадратные корни в E) вещественны, то из этого следует, что общее
решение уравнения C) имеет вид
у(х) — xaw(z) = xaw(kx(S),
где
w(z) = ci Jp(z) + c2Y-p(z)
(в предположении, что р не равно целому числу) — общее решение уравнения Бесселя A).
Этим установлен следующий результат.
Теорема 1
I Выражение решений через функции Бесселя
Если С > 0, q ф 0 и A — АJ ^ 413, то общее решение (для х > 0) уравнения C) имеет вид
> y(s) = xa [aJpikaf) + c2J-p(fcn^)] , F)
где а9/39кир определяются равенствами E). Еслир — целое число, то J_p нужно заменить
на!^,. А
Пример 1
Решим уравнение
4х2у" + 8ху' + (ж4 - 3)у = 0.
G)
8.6. Приложения функций Бесселя 775
Решение Чтобы сравнить уравнение G) с уравнением C), мы перепишем последнее
в виде
*У + 2*г/'+(-| + !*4)у = 0;
теперь видно, что А = 2, В — — §, С = | и g = 4. Тогда равенства E)
дают а = —1,/? = 2, &=|ир=|. Таким образом, общее решение F)
уравнения G) имеет вид
у(х) = х-1'2 [ClJ1/2 (±я2) +c2J_1/2 {\х2)} .
В соответствии с равенством A9) из раздела 8.5 имеем
Л/гО*) = у—sinz и J~i/2(z) = J—cosz,
откуда видно, что общее решение уравнения G) может быть выражено
через элементарные функции так:
у(х) = х 3/2 f A cos — + В sin — J
Пример 2
Решим уравнение Эйри
у" + 9ху = 0. (8)
Решение Сначала мы перепишем данное уравнение в форме
х2у" + 9х3у = 0.
Это частный случай уравнения C) при А = В = 0, С = 9nq = 3. Из
равенств E) следует, что а — \,&— §,& = 2ир= \. Таким образом,
общее решение уравнения (8) имеет вид
у(х) = х1/2 [С1 Л/зB*3/2) + с2Х_1/3Bх3/2)
Продольный изгиб вертикальной колонны
Мы теперь рассмотрим задачу, важную для практических приложений. В этой задаче
требуется определить, когда однородная вертикальная колонна согнется под ее собственным
весом. Мы полагаем х = 0 в свободном верхнем конце колонны их = £>0вее основании;
мы предполагаем, что основание жестко вставлено (т. е. закреплено неподвижно) в основу
(в землю), возможно в бетон (рис. 8.6.1). Обозначим угловое отклонение колонны в точке х
через в(х). Из теории эластичности при данных условиях следует, что
dx2
Е1т-2+дрхв = 01 (9)
776 Глава 8. Методы степенных рядов
Основа (земля)
Рис. 8.6.1. Продольный
изгиб колонны
где Е — модуль Юнга материала колонны, / — момент инерции ее поперечного сечения, р —
линейная плотность колонны и д — гравитационное ускорение. Граничные условия имеют
вид
0'(О) = 6, 0(L)=O. A0)
Мы примем равенства (9) и A0) как правильную постановку задачи и будем пытаться решать
эту задачу в такой форме. При
7 EI
(Н)
мы имеем задачу на собственные значения
в" + j2x6 = 0; 0'(О) = 0, в(Ь) = 0. A2)
Колонна может деформироваться, только если есть нетривиальное решение задачи A2);
иначе колонна останется в неотклоненном от вертикали положении (т. е. физически не сможет
отклониться от вертикали).
Дифференциальное уравнение{12) представляет собой уравнение Эйри, подобное
уравнению в примере 2. Оно имеет форму уравнения C) при А = В = 0, С = 72 и q = 3. Из
равенств E) получаем а = |, /3 = §,&= §7 и р = ^ • Поэтому общее решение имеет вид
6{х) = х1'2 [d J1/3 (§7*3/2) + с2 J-1/з (§7*3/2)] • A3)
Чтобы применить начальные условия, мы подставляем р ■
Jp(x) = S
(-1Г
±±в
X ч 2т+р
га=0
и после некоторых упрощений находим, что
■^ т\ Г(р + т + 1)
(I)
в(х) =
ci7
1/3
3V»r (|)
сгЗ1/3
х ■
72ж4 74#7
12
504
"О
+
+
у/зГ (|)
J2X3 ^4Х6
6~ + 8(Г
8.6. Приложения функций БессегГя 777
Из этого видно, что из условия в конечной точке 0'(О) = 0 следует, что с\ — 0, так что
0(*)=С2^27_1/з(|7хЗ/2) A4)
Условие в конечной точке 6(L) = 0 теперь приводит к равенству
J_1/3(hi3/2)=0. A5)
Таким образом, колонна деформируется только если z = ^jL3/2 — корень уравнения
«/_1/з(г) = 0. График функции
^»={-т^ы±
тот ~1т
{-1)тЪтг
Г(§)
<х22тт\-2-Ь-(Зт-1)
A6)
(см. задачу 3 из раздела 8.5) показан нарис, 8.6.2, из которого видно, что наименьший
положительный нуль z\ немного меньше, чем 2. Многие технические вычислительные системы
могут найти такие корни. Например, каждая из команд компьютерной системы
f solve (BesselJ (-1/3, х)=0, х, 1..2) {Maple)
FindRoot [BesselJ[-l/3,x]==0, {x, 2} ] (Mathematica)
fzero('besselj (-1/3, х)', 2) (MATLAB)
выдаст значение z\ = 1,86635 (округлено с точностью до пяти десятичных знаков).
2i
-1
1 ' ! •
1 i :
{...:.;.;
i i i
i i
i • i X
i i
0 5 10 15
x
Рис. 8.6.2. График J_i/3(a;)
Самая короткая длина Lb при которой колонна деформируется под ее собственным
весом, равна
_ CZ1\2/3 \згг (Е1\1/2
2/3
Если мы подставим z\ « 1,86635 и р = SА, где S — объемная плотность материала колонны,
а А — площадь ее поперечного сечения, мы, наконец, получим
A7)
778 Глава 8. Методы степенных рядов
Поперечное сечение <
ри продольном изгибе) Li
Круговое при г — 0,5 дюйма
Круговое при г = 1,5 дюйма
Кольцевое при ппПег = 1,25 дюйма и router = 1,5 дюйма
30 футов 6 дюймов
63 фута 5 дюймов
75 футов 7 дюймов
Рис. 8.6.3.
для критической длины (при продольном изгибе) колонны. Например, для стальной колонны
или стержня, для которого Е — 2,8 х107 фунт/ дюйм2 идб = 0,28 фунт/дюйм3, формула A7)
дает результаты, приведенные в таблице на рис. 8.6.3.
Мы использовали знакомые формулы А = ят2 и I = ^7гг4 для кругового диска. Данные
в таблице показывают, почему флагштоки пустые внутри.
8,6, Задачи
В задачах 1-12 выразите общее решение данного дифференциального уравнения через функции
Бесселя.
1. х2у" - ху' + A 4- х2)у = 0
3. ху" - у' + 36а:3 у = 0
5. ЗбхУ + 60ху' + (9х3 - 5J/ = 0
7. х2у" + Ъху1 + A 4- х2)у = 0
9. 16ж22/;/
E - 144z3)i/:
= 0
0
2. ху" + Зу' + ху = 0
4. жУ - 5ху' + (8 + х)у = 0
6. 16хУ + 24ху' + A4- 144г3)у = 0
8. 4х2у" - 12ху' + A5 4- 16х)у = 0
10. 2х2у" - Ъху' - 2A4 - х5)у = 0
12. у" + 4ж32/ = 0
11. у" + х%
13. Примените теорему 1 и покажите, ^то общее решение уравнения
ху" + 2у + ху = 0
имеет вид 2/(ж) = ж-1 (Л cos ж + В sin ж).
14. Проверьте, что подстановки B) в уравнении Бесселя (уравнение A)) приводят к уравнению C).
15. (а) Покажите, что подстановка
_ 1 du
и dx
преобразует уравнение Риккати dy/dx — х2 4- у2 в уравнение и" 4- х2и = 0. (Ь) Покажите,
что общее решение уравнения dy/dx ■
х2 + у2 имеет вид
у(х) = х
J3/4 {\Х2) - cJ_S/4 {±X2)
cJl/4(^)+J.1/4(Ix2)-
{Указание. Примените тождества B2) и B3) из раздела 8.5.)
16. (а) Подставьте ряд из задачи 11 в разделе 8.5 в результат задачи 15 данного раздела и покажите,
что решение задачи Коши (задачи с начальными условиями)
&у_
dx
х2 + у2,
У@) = 0
8.6. Приложения функций Бесселя
779
имеет вид
/ ч J3/4 {2х )
у(х) = х ' \\ ' .
(b) Выведите подобным способом, что решение задачи Коши (задачи с начальными условиями)
dy^
dx
= х2+у2, 2/@) = 1
имеет вид
ь(тЛ _ 2r(|)J3/4(^)+r(i)j_3/4(Ia;2)
yW-*2r(J)J.1/4(i«")-r(J)J1/4(i*»)-
Некоторые интегральные кривые уравнения dy/dx = х2 4- у2 показаны на рис. 8.6.4.
Положение асимптот, где у{х) —» +оо, может быть найдено методом Ньютона нахождения нулей
знаменателей в формулах для приведенных здесь решений.
-3 -2 -1
0
х
Рис. 8.6.4. Интегральные кривые уравнения
dy 2,2
Тх=Х +У
На рис. 8.6.5 показан линейно суживающийся стержень с круговым поперечным сечением, на
который действует осевая сила Р сжатия. Как и в разделе 3.8, он отклоняется, изгибаясь вдоль
некоторой кривой (называемой кривой прогиба), которая удовлетворяет уравнению у = у(х).
Эта кривая прогиба является решением краевой задачи
Ely" + Ру = 0; у(а) = у(Ъ) = 0:
A8)
Рис. 8.6.5. Конический (суживающийся)
стержень из задачи 17
Здесь, однако, момент инерции I = 1(х) поперечного сечения в точке х дается формулой
J(*) = i*(fctL = Jo.(!)\
780
Глава 8. Методы степенных рядов
где /о = 1(b) представляет собой значение J в точке х =f Ь. Замена /(#) в дифференциальном
уравнении A8) приводит к задаче на собственные значения
4. //
хУ + Ау = 0, у{а) = 2/F) = 0,
где Л = /х2 = РЬ4/Е1о. (а) С помощью теоремы 1 из этого раздела покажите, что общее
решение уравнения ж4 у" + /л,2у = 0 имеет вид
j/(x) = х IA cos — -|- В sin — ) .
(Ь) Заключите из этого, что n-е собственное значение дает формула рп — nirab/L, где L =
= Ь — а — длина стержня, и, следовательно, что п-я сила продольного изгиба равна
7127Г2 /(Z\2
Заметьте, что если а = Ь, этот результат упрощается и имеет место равенство B8) из раздела 3.8.
18. Рассмотрим маятник переменной длины, показанный на рис. 8.6.6. Предположите, что его
длина увеличивается линейно со временем: L(t) = а 4- bt. Можно показано, что колебания
этого маятника удовлетворяют дифференциальному уравнению
L9" + 21/0' + дв = 0
при обычном условии, что в действительно так мало, что sin0 очень хорошо приближается
с помощью в: в « sin в. Подставьте L = а + Ы и получите общее решение
0(i) = ^= AJt (lV9L) + BY, (^y/iLJ
Это решение может пригодиться при обсуждении равномерно снижающегося маятника.
Вспомните маятник, у которого нижний край имел форму полумесяца из блестящей стали,
приблизительно фут в длину от рожка до рожка; рожки были загнуты вверх, и край был острый,
как у бритвы ... и весь шипел, качаясь в воздухе ... и опускался все ниже и ниже ... Да,
это написал классик жутких ужастиков Эдгар Аллан По в рассказе "The Pit and the Pendulum"
(Яма и маятник). Так вот, обсуждению маятника переменной длины посвящена статья Борелли
(Borrelli), Колемана (Coleman) и Гобсона (Hobson) в мартовском выпуске (за 1985 год)
математического журнала Mathematics Magazine. (Эту*статью вы найдете в томе 58 на стр. 78-83.)
^и1$ш^шШшшш£Л^^^ШШ^тЛшш»иШш
Рис. 8.6.6. Маятник переменной длины
8.6. Приложения функций Бесселя 781
8.6. Приложение. Уравнения Риккати
и модифицированные функции Бесселя
ц№№№ДО>^**№гР№«№ЭД№«г'1*^^
Уравнение Риккати — одно из тех, что имеет вид
"" = А(х)у2 + В(х)у + С(х).
dx
Решения многих уравнений Риккати, подобных перечисленным ниже, могут быть выражены
явно через функции Бесселя.
^ 2 . 2 /14
— =xz+yz; (l)
dV 2 2 /ол
Tx=X~V' B)
JW-*2; ' О)
ах
% = х + у2; D)
df = x-y>; E)
ах
^=У2— . F)
ах
Например, из результата задачи 15 в этом разделе следует, что общее решение уравнения A)
дает формула
Давайте посмотрим, что сможет сделать с таким уравнением команда решающей
программы для решения дифференциальных уравнений с возможностью символической
обработки данных, имеющаяся в вашей системе компьютерной алгебры. Проверьте, например,
совпадает ли результат выполнения команды системы Maple
dsolve(diff(у(х),х) = хА2 + у(х)А2, у(х))
или команды системы Mathematica
DSolve[ у'[х] == хА2 + у[х]А2, у[х], х ]
с равенством G). Если в результе есть другие функции Бесселя (кроме тех, которые
появляются в равенстве G)), вполне возможно, что нужно применить тождества B6) и B7) из
раздела 8.5, чтобы преобразовать "ответ" компьютера в равенство G). Затем проверьте,
сможет ли ваша система взять предел при х —■> 0 в равенстве G) и показать, что произвольная
постоянная с выражается через начальное значение у@) с помощью равенства
с_ »@)г Щ
с-- 2Г(|) • (8)
782 Глава 8. Методы степенных рядов
Теперь вы должны уметь использовать встроенные функции Бесселя, чтобы вычертить
типичные интегральные кривые, подобные показанным на рис. 8.6.4.
Затем исследуйте подобным образом одно из других уравнений B)-F). Каждое из них
имеет общее решение того же самого общего вида, что и G), т. е. представляет собой частное
линейных комбинаций функций Бесселя. В дополнение к Jp(x) и Yp(x) эти решения могут
содержать модифицированные функции Бесселя
Ip(x) = i~pJp(ix)
и
Kp(x) = ^r*[Jp(ix) + Yp(ix)],
которые удовлетворяют модифицированному уравнению Бесселя
хV + ху' - (х2 + р2)у = О
порядка р. Например, общее решение уравнения E) для х > О дает формула
у(х) д1/2^/зA^3/2)-с/-2/зA^) "
У{Х) - /_1/3 Ax3/2) _ с/1/3 B*3/2) • W
где
с=-уЩШ A0)
3V3r(|) U;
На рис. 8.6.7 показаны некоторые типичные интегральные кривые, а также парабола у2 = х,
которая, оказывается, имеет отношение к уравнению F); интересно отметить, что мы видим
нечто заливочной воронки (своеобразная сточная труба) около у = +у/х и струю-источник
(нечто вроде фонтанчика с брызгами) около у = —у/х.
Функции Бесселя с мнимым аргументом, которые появляются в определениях 1р(х)
и Кр(х)9 могут выглядеть экзотически, но степенной ряд модифицированной функции
1п(х) — это просто ряд обычной функции Jn(x) за исключением того, что в нем нет
чередующихся знаков "минус". Например,
2 4 fi
ЛГ»** /V»^ T»V
т / \ - **/ "^ ***
/о(*)=:1 + Т + 64 + 2304 + -"
и
/у» ф ^ Т*
1 (Х) = 2 + 16 + 384 + 18432 + ''' '
Проверьте эти разложения в степенной ряд с помощью вашей системы компьютерной
алгебры —поищите BessellB справочной системе пакета Maple или Mathematica и сравните
их разложения с равенствами A7) и A8) из раздела 8.5.
Дифференциальные уравнения второго порядка с теми же самыми правыми частями, что
и в уравнениях A)-F), имеют интересные решения, которые, однако, не могут быть
выражены через элементарные функции или "известные" специальные функции вроде функций
Бесселя. Однако их можно исследовать с помощью программы, предназначенной для
графического отображения решений обыкновенных дифференциациях уравнений. Например, на
8.6. Приложения функций Бесселя
783
Рис. 8.6.7. Интегральные кри-
dy 2
вые уравнения — = х — yz
ах
_ , j , ! ^J^--»-
^ ^ ^
— .— •■*-"' ""* v^ = г —
Рис. 8.6.8. Первые
трансцендентные кривые Пенлеве г/" = у2 — х,
у@) = 0,^@) = -3,3,-3,1,..., 0,7
рис. 8.6.8 показан интересный образец поведения интегральных кривых уравнения второго
порядка
у" = у2 -х
(Н)
с одним и тем же самым начальным значением у@) = 0, но с различными наклонами
г/'@) = —3,3, —3,1,..., 0,7. Уравнение A1)—форма первого трансцендентного уравнения
Пенлеве (Painleve), которое вошло в историю благодаря попытке классификации
нелинейных дифференциальных уравнений второго порядка в терминах их точек равновесия. (По
этому поводу см. главу 14 классического учебника Айнса по обыкновенным
дифференциальным уравнениям, переизданного в Нью-Йорке в 1956 году: Е. L. Ince, Ordinary Differential
Equations, New York: Dover Publications, 1956). Рис. 8.6.8 был предложен в статье Энн Нон-
бюрг (Anne Noonburg), содержащей подобный рисунок, в весеннем выпуске 1993 года
информационного бюллетеня по обыкновенным дифференциальным уравнениям С • ODE • Е
Newsletter.
Наконец, мы приведем относящийся сюда пример, на который вдохновил нас
демонстрационный пакет системы Maple. Команда dsolve системы Maple приводит к общему
решению
у(х) = х (ci Jiq(x) + c2Yi0{x)) +
+ ж1 A857945600 + 51609600а;2 + 806400х4 + 9600х6 + 100а;8 + х10) A2)
неоднородного уравнения второго порядка
х2у" + Ъху' + (аг2 - 99)у = х. A3)
Покажите, что теорема 1 из этого раздела объясняет "бесселеву часть" предполагаемого
решения в равенстве A2). Можете ли вы объяснить, откуда взялась часть, связанная с
рациональной функцией, или по крайней мере проверить ее? Дальнейшие примеры этого сорта
вы можете построить так: замените коэффициент 99 в уравнении A3) на г2 — 1, где г —
четное целое число, или замените (можете обе замены сделать одновременно) х в правой
части на х8, где 8 — нечетное целое число. (При других заменах могут появиться и более
экзотические специальные функции.)
ГЛАВА
Методы
рядов Фурье
9.1. Периодические функции
и тригонометрические ряды
Как побуждение для изучения рядов Фурье, мы рассматриваем дифференциальное
уравнение
fl+u;lx = f(t), A)
которое моделирует поведение системы, состоящей из материальной точки заданной массы,
закрепленной на пружине, с собственной [круговой] частотой и>о- (Движение эта система
совершает под влиянием внешней силы величиной f(t) на единицу массы.) Как мы видели
в разделе 3.6, частное решение уравнения A) легко найти методом неопределенных
коэффициентов, если f(t) — простая гармоническая функция, т. е. функция синус или косинус.
Например, уравнение
dt2
при uj2 ф UJ2 имеет частное решение
d2x
+ oJqX = A cos ut B)
xp(t) = ~2 о coso;t, C)
Wr\ — ^
которое легко найти, если начать с пробного решения хр (t) = a cos uot.
Теперь сделаем более общие предположения. А именно, предположим, что силовая
функция / (t) в уравнении A) является линейной комбинацией простых гармонических функций.
Тогда, на основе уравнения C) и аналогичной формулы с синусом вместо косинуса, мы
786 Глава 9. Методы рядов Фурье
можем применить принцип суперпозиции, чтобы сконструировать частное решение
уравнения A). Рассмотрим, например, уравнение
42 я- N
-^ + ш%х = ^2 Ап cos unt, D)
n=l
в котором ujq не равно ни одному из чисел о;£. Уравнение D) имеет частное решение
N д
Хр(Ь) = Х^ 2_П 2 COSUJnt, E)
п=1 "° Un
которое получается в результате суммирования решений, определенных равенством C) для
соответствующих N слагаемых в правой части в уравнении D).
Механические (и электрические) системы часто содержат периодические вынуждающие
функции, которые не являются [просто] конечными линейными комбинациями синусов
и косинусов. Однако, как мы скоро увидим, любая разумно хорошая периодическая функция
f(t) имеет представление в виде бесконечного ряда тригонометрических членов. Этот факт
открывает способ решения уравнения A) сложением тригонометрических "стандартных
блоков", в котором конечная сумма в уравнении E) заменяется бесконечным рядом.
Определение. Периодическая функция
Функция /(£), определенная для всех £, называется периодической при условии, что
существует положительное число р9 такое что
> /(*+?) = /(*) F)
для всех t. Число р в этом случае называется периодом функции /.
Обратите внимание, что период периодической функции не единственный; например;
если р — период функции /(£), то и числа 2р9 Зр и так далее также являются ее
периодами. Действительно, каждое положительное число является периодом любой постоянной
функции.
Если существует наименьшее положительное число Р, такое что f(t) является
периодической с периодом Р, то мы называем Рнаименьшим полооюительным (главным, основным)
периодом функции /. Например, наименьший положительный период функций g (t) = cos nt
и h(t) = sin nt (где п — положительное целое число) равен 2тг/п9 потому что
cosn
( t H 1 = cos(nt + 27г) = cosnt
и G)
sin n I t Н 1 = sm(nt + 27г) = sin nt.
Кроме того, 27г также является периодом функций g(t) и h(t). Обычно у нас не будет
необходимости указывать именно наименьший положительный период функции f(t) и мы будем
просто говорить, что / (t) имеет период р, если р—любой период функции /(t).
9.1. Периодические функции и тригонометрические ряды 787
2тг Ъп
Рис. 9.1.1. Функция
прямоугольного колебания (меандр)
В разделе 7.5 мы видели несколько примеров кусочно непрерывных периодических
функций. Например, функция прямоугольного колебания (меандра), график которой показан
на рис. 9.1.1, имеет период 27г.
Поскольку каждая из функций g(t) = cos nt и h(t) = sin nt имеет период 27Г, любая
линейная комбинация синусов и косинусов, кратных t, такая как
f(t) = 3 + cost - sin* + 5cos2£ + 17sin3£,
имеет период 27г. Но каждая такая линейная комбинация непрерывна, так что функция
прямоугольного колебания (меандра) не может быть выражена в таком виде. В своем
знаменитом трактате Аналитическая теория тепла1 A822), французский ученый Жозеф Фурье
A768-1830) сделал замечательное открытие: каждая функция f(t) с периодом 27Г может
быть представлена бесконечным тригонометрическим рядом вида
Оо
т
+ /J (an cos nt + bn sin nt). (8)
n=l
Мы увидим в разделе 9.2, что при довольно умеренных ограничениях на функцию f(t)
это действительно так! Бесконечный ряд вида (8) называют рядом Фурье, а представление
функций рядом Фурье — один из широко используемых методов в прикладной математике,
особенно для решения дифференциальных уравнений в частных производных (см. разделы
9.5-9.7).
Ряд Фурье функции с периодом 2п
В этом разделе мы ограничим наше внимание функциями, период которых равен2 27г. Мы
хотим определить значения коэффициентов ряда Фурье (8), если он сходится к заданной
функции f(t), период которой равен 27г. Для этой цели нам понадобятся значения следующих
интегралов, в которых тип обозначают положительные целые числа (задачи 27-29):
Г* I 0> если тфп*
cos mt cos ntdt = < (9)
J-тг 17г, если га = n;
Г , . |0) если га т^ п, ,,лч
sin rat sin nt <Й = < A0)
J—тг 1тг, если га = п;
1 Theorie analytique de la chaleur. Для любителей копаться в Интернете авторы приводят ее английское название:
The Analytic Theory of Heat. — Примеч. ред.
2 Как уже говорили авторы, чаще всего это значит, что один из периодов равен 2п. — Примеч. ред.
788 Глава 9. Методы рядов Фурье
cos mt sin nt dt = 0 для всех тип. A1)
J—7Г
Эти формулы означают, что функции cos nt и sin nt для п = 1,2,3,... составляют взаимно
ортогональную систему функций на интервале [—7г, 7г]. Две действительные функции u(t)
и v(t) называются .ортогональными на интервале [а, 6], если
[ гх(ф(£) dt = 0. A2)
Ja
Предположим теперь, что кусочно непрерывная функция /(£), период которой равен 27Г,
имеет представление в виде ряда Фурье
оо
^ /(*) = " + ]^(amcosm£ + bmsinm£), A3)
7П=1
в том смысле, что бесконечный ряд справа сходится к значению f(t) для каждого t. Мы
предполагаем кроме того, что если бесконечный ряд в равенстве A3) умножить на любую
непрерывную функцию, то полученный ряд можно интегрировать почленно. Тогда результат
почленного интегрирования равенства A3) от £ = — 7г до £ = 7г будет таким:
Г*/(*)Л=?Г»1Л+
+ У"] ( ат cosmtdt} + /J f bm sinmtdtJ = 7гао,
m=l V J-* / m==i V J-tt /
потому что все интегралы от тригонометрических функций обратятся в нуль. Следовательно,
, сю =-Г f(t)dt. A4)
^ J-7T
Если мы сначала умножим каждую часть равенства A3) на cos nt и затем проинтегрируем
почленно, в результате получим
/(£) cos nt dt = — cos ntdt +
J-7T 2 J_7r
+ 22 ( am cos mt cos ntdt) + /^ ( Ьш sin mt cos nt dt J ,
m=l ^ J-n ' m=l ^ J-71- '
затем из равенства A1) следует, что
рТГ °° / р7Г \
f(t)cosntdt = Y^ a^ ( cosmt cos ntdt 1 . A5)
J-тг m==1 VJ-TT /
Но изо всех интегралов (для m= 1,2,3,...) в правой части равенства A5) отличным от нуля
является только тот, для которого т = п. Таким образом, равенство (9) дает
Г7Г р7Г
f(t) cos nt dt = an\ cos2 nt dt = ixan,
J—7Г J—7Г
9.1. Периодические функции и тригонометрические ряды 789
так что значение коэффициента ап равно
1 Г
ап = — \ f(t)cosntdt. , A6)
Заметьте, что при п = О формула A6) приводит к равенству A4); это объясняет, почему мы
обозначаем постоянный член в первоначальном ряде Фурье через \clq (а не просто через ао).
Если мы умножим каждую часть равенства A3) на sin nt и затем проинтегрируем полученное
равенство почленно, мы подобным способом найдем, что
Г Г*
*Г J-7T
sixintdt. A7)
Короче говоря, мы установили, что если ряд в A3) сходится к f(t) и если допустимо
выполнять интегрирование почленно в тех случаях, в которых мы это сделали, то значения
коэффициентов ряда определяются равенствами A6) и A7). Это объясняет, почему ряд
Фурье периодической функции определяется с помощью этих формул независимо от того,
действительно ли полученный ряд сходится к функции (или даже сходится ли он вообще).
Определение. Ряд Фурье и коэффициенты Фурье
Пусть f(t) является кусочно-непрерывной функцией, период которой равен 27г, причем
эта функция определена для всех t. Тогда ряд Фурье функции f(t) представляет собой
рад
>
оо
— + yZ (an cos nf + bn sin nt),
2 n=l
где коэффициенты Фурье ап и Ьп определены с помощью формул
>
дляп = 0,1,2,3,.
>
дляп = 1,2,3,...
l Г
an = ^ \ f(t) cos ntdt
* J-7T
.. и
1 Г
bn = — \ f(t)sinntdt
* J-7T
A8)
A6)
A7)
Может случиться (и часто случается), что ряд Фурье заданной функции не сходится
к функции в некоторых точках из области определения функции. Мы поэтому будем писать
оо
/(*) ~ /у + ]^(a^cosn* + bnSinn*)' A9)
71=1
не ставя знака равенства между функцией и ее рядом Фурье, пока мы не обсудим сходимость
ряда Фурье в разделе 9.2.
790 Глава 9. Методы рядов Фурье
Предположим, что кусочно-непрерывная функция f(t) первоначально определена
только на интервале [—7г, 7г], и примем, что / (—тт) = / Gг). Тогда, налагая условие периодичности
на /, мы можем продолжить ее с помощью равенства f(t -f 27г) = /(£), потребовав, чтобы
оно выполнялось для всех £, т. е. так, чтобы область определения продолжения
содержала все вещественные числа. Мы продолжаем обозначать это продолжение первоначальной
функции через / и обращаем внимание, что оно автоматически имеет период 27г. График
продолжения выглядит так же на каждом интервале вида
Bгс - 1)тг <; t <; Bп + 1)тг,
где п — целое число (рис. 9.1.2). Например, функция прямоугольного колебания (меандра)
на рис. 9.1.1 может быть описана как функция периода 27Г, такая что
/(*) = {
— 1, если—7г < t < 0;
+1, если0<£<7г;
0, если t = —7г, 0 или тт.
B0)
Таким образом, функция прямоугольного колебания (меандра) представляет собой функцию
периода 27г, определенную на одном полном периоде равенством B0).
/V
1 » 1 ф
1 1 1
-ЗТГ -7Г
Ш-
,J ,,J СУ
i i i i i i
к Ък 5тг х
Рис. 9.1.2. Продолжение
функции таким способом, чтобы
получилась периодическая функция
* Мы должны рассматривать ряды Фурье кусочно непрерывных функций, потому что
многие функции, которые применяются в приложениях, являются только кусочно
непрерывными, но не непрерывными. Обратите внимание, что интегралы в равенствах A6) и A7)
существуют, если /(£) кусочно непрерывна, так что каждая кусочно непрерывная функция
имеет ряд Фурье.
Пример 1
Найдем ряд Фурье функции прямоугольного колебания (меандра),
определенной равенством B0).
Решение Всегда стоит попытаться вычислить ао отдельно с помощью
равенства A4). Таким образом, мы имеем
а0 = i Г f(t) dt=-\ (-1) dt + - Г(+1) dt
к }_„ ^ J_7r 7Tj0
= -(-7г) + -Gг)=0.
7Г 7Г
9.1. Периодические функции и тригонометрические ряды 791
Мы разбиваем первый интеграл на два интеграла, потому что /(t)
определена различными формулами на интервалах (—7г, 0) и @,7г); значения
функции /(t) в конечных точках этих интервалов не влияют на значения
интегралов.
Из равенства A6) при п > 0 получаем:
1 Г If0 if*
ап = — \ f(t) cosntdt = — (— cos nt) dt-\— cos ntdt =
1 \ l ' *
= — — sin nr
7Г П
1 Г1 • .
H— — sin nr
7Г П
Jo
А из равенства A7) получаем
1 Г If0 1 Г
bn = — /№ sin ntdt — — (— sin nt) dt -\— sin ntdt =
TTJ-tt ^J-tt ^ JO
1 Г1
= — \ — cos nt
7Г П
i0
i Г i
H— cos nt
7Г П
0
= -^A-С08П7г) = -1A -(-1)»].
П7Г П7Г
Таким образом, an = 0 для всех п ^ 0 и
—т- для п нечетных;
0 для п четных.
Последний результат следует из того, что cos(~n7r) = cos(n7r) = (—l)n.
Зная эти значения коэффициентов Фурье, мы получаем ряд Фурье
-,АЧ 4 х-^ sin nt
7Г *-^ П
п нечетное
4 Л , 1
= - smt+-
7Г \ 3
sin3t + ^sin5tH ) . B1)
о
■)•
Здесь мы ввели полезное обозначение
]Г для
п нечетное
п=1
п нечетное
- например,
Е -
^ п
, 1 1
1+3+5+
п нечетное
На рис. 9.1.3 показаны графики нескольких частичных сумм
^w = -EsinBn~1)*
71=1
2п-1
792 Глава 9. Методы рядов Фурье
ряда Фурье B1). Обратите внимание, что, когда t приближается к разрыву
/(£) с любой стороны, значение S^it) имеет тенденцию промахиваться
и немного превышает (по абсолютной величине) предельное значение
f(t) —hi или — 1 в этом случае. Это поведение ряда Фурье в окрестности
точки разрыва его функции типично и известно как явление Гиббса. ■
и
-2я -:
■ 1
с
рууЩ
|^*л/|
1
Р 2^
u
Частичная сумма 3 членов ряда
Частичная сумма 6 членов ряда
k-i
-2п -к
Ш№*ШфЩ-\
2%
Щ9***фШЩ
штш*
2%
ыъшяц
1
1
Р****"
-1
mrnnad
«ятщ
fe-irmj
Г
2к
Частичная сумма 12 членов ряда
Частичная сумма 24 членов ряда
Рис. 9.1.3. Графики частичных сумм ряда Фурье функции прямоугольного
колебания (меандра) (пример 1) с N = 3, б, 12 и 24 членами
Следующие интегральные формулы, легко получаемые интегрированием по частям,
полезны при вычислении рядов Фурье полиномиальных функций:
и cos udu — cos u + u sin и + С;
и sin udu = sin u — u cos u + C;
J
I
un cosu du = un sin u — n un~x sinu du;
cos и du.
B2)
B3)
B4)
B5)
9.1. Периодические функции и тригонометрические ряды 793
Найдем ряд Фурье функции, период которой равен 27Г и которая опреде
лена на одном периоде так:
( О, если —7г < t \ъ. 0;
£, если0^£<7г;
/(*)
B6)
7Г
—, если£ = ±7г.
2'
График функции / приведен на рис. 9.1.4.
zLj^JH-^^
-2тг
2тг 4тг бтг
Рис. 9.1,4, Периодическая
функция из примера 2
Решение Значения /(=Ь7г) являются несущественными, потому что они не имеют
никакого влияния на значения интегралов, по которым определяются
коэффициенты Фурье. Поскольку f(t) = 0 на интервале (—7г, 0), каждый
интеграл от £ = — 7г до t = 7г может быть заменен интегралом от t = 0 до
t = 7г. Поэтому в соответствии с равенствами A4), A6) и A7) имеем
«о
I Г
тг Jo
tdt= -
7Г
-t4
7Г
2;
If71" 1 ГП7Г / м\
ап = — £cosntdt — —тг- uc°sudu [u = nt, t = — )
7TJ5 n27TJo V П/
1 Г "|П7Г
= —^— cos w + w sin и = (по формуле B2))
nz7r L Jo
-ЖК-1Г-Ч.
Следовательно, ап = 0 для четных п ^ 2;
2
an = —-
если п нечетное.
Далее,
-1 Г7Г -| рП7Г
&n = — t sin nt dt = —тг- и sin udu =
7Г Jo ™2*" Jo
1 Г 1П7Г
= —r— sin и — u cos u (по формуле B0)) =
Пг7Г L J0
• COS П7Г.
n
794 Глава 9. Методы рядов Фурье
Так что
(_1)п+1
Ьп = -— для всех п ^ 1.
п
Следовательно, ряд Фурье функции f(t) имеет вид
/w~4-- E -^-+£^4—• B7)
п нечетное п=1
Если период функции f(t) равен 27Г, то легко проверить (задача 30), что
./(*)*= /(*)* B8)
J—7г Ja
для всех а. Иными словами, интеграл от функции f(t) по одному какому-нибудь интервалу
длины 27Г равен интегралу от этой функции по любому другому такому интервалу. В случае,
если f(t) задана явно на интервале [0,27г], а не на [—7г, 7г], может оказаться более удобным
вычислить ее коэффициенты Фурье так:
1 Г27Г
ап = - f(t) cos ntdt B9а)
тг Jo
1 f27r
Ьп = - f(t)sinntdt. B9b)
тг Jo
9.1. Задачи
В задачах 1-10 сделайте набросок графика функции /, определенной для всех t заданной формулой,
и определите, является ли эта функция периодической. Если это так, найдите ее наименьший
период.
1. f(t) = sin3t 2. f(t) = cos2tt£
3. /(t) = coe| 4. f(t) =smf
5. f(t) = tgt 6. fit) = ctg27r£
7. /(£) = cosh3t 8. f(t) = sinhTrt
9. /(£) = | sint| 10. f(t) = cos2 3t
В задачах 11-26 даны значения функции fit) (период которой равен lis) на одном полном периоде.
Сделайте эскиз графика функции на нескольких периодах и найдите ряд Фурье этой функции.
Г+3, -7г<г<^0;
|-3, (Хг^тг
13./(*)Л°' -*<*5°; 14. /(t) = ( 3' -*<1^
11. fit) = l9-7rutU7T 12. fit)
3, -тг <t^0;
2, 0<
15. fit) =t,-7T<tU7T 16. /(*) = t, 0 < * < 27Г
9.2. Ряд Фурье общего вида и сходимость 795
17. /W = |*|, -«Щж 18. /(*) = (* + «' -* < ' | °;
I 7Г — t, 0 < t Ь 7Г
19. /Ю-/""' -^<0', 20. /(*)
\о, 0^*^тг JW
ГО, -7г^^<-тг/2;
1, -тг/2 ^ t ^ тг/2;
[о, тг/2 < t ^ тг
21. /(*) = *2 , -тг ^ tu тг 22. /(*) = t2 , 0 ^ * < 2тг
23.
s./w = @:, -"a'S0;
25. /(*) = cos2 2t, -тг ^ * <; тг 26.
27. Проверьте равенство (9). Указание. Примените тригонометрическое тождество
cos A cos В = | [cos(A + В) + cos(A — Б)].
28. Проверьте равенство A0). 29. Проверьте равенство A1).
30. Пусть /(£) — кусочно непрерывная функция с периодом Р. (а) Предположим, что 0 й а < Р.
Подставьте и = t — Р и покажите, что
га+Р
ra-\-f га
f(t)dt=\ f(t)dt.
JP JO
Заключите из этого, что
га+Р
га+Г пР .
f(t)dt=\ f(t)dt.
Ja JO
(b) Для данного А выберите n так, чтобы А = пР + а для 0 ^ а < Р. Затем подставьте
г? = t — пР и покажите, что
f(t)dt= f(t)dt= f(t)dt.
JA Ja Jo
31. Умножьте каждую часть равенства A3) на sinnt и затем проинтегрируйте почленно, чтобы
получить равенство A7).
9.2. Ряд Фурье общего вида и сходимость
В разделе 9.1 мы определили ряд Фурье периодической функции, период которой равен 27г.
Теперь пусть f(t) обозначает функцию, которая является кусочно непрерывной для всех t
и имеет произвольный период Р > 0. Мы пишем
Р = 2L, A)
так что L — полупериод функции /. Давайте теперь определим функцию д следующим
образом:
796 Глава 9. Межщвд рядов Фурье
для всех и. Тогда
9(u + 2n) = f(^±2l)j=f(^j=9(u)^
и, следовательно, д(и) является также периодической и имеет период 27г. Следовательно, д
имеет ряд Фурье
д(и) ~ — + Yj(an cosrnt 4- Ьп sin?ш) C)
с коэффициентами Фурье
1 Г
ап = — д(и) cos пи du Da)
Я" J-7T
1 г
^п = — g(u)smnudu.
Если мы теперь напишем
то
/./ ч /^А а0 V^ / nnt , П7гА
/(<)=9(TJ~y + ^(anCOS—+6n —j,
4 7 п=1 ч 7
и затем подстановка E) в D) приводит к равенствам
ап = — #См) cosnudu 1 и = —, d-u = -7" d£ ) =
^ J-7T V • L L J
iLV(?)
птт£ •
cos —— at.
Ju
Поэтому
-L
подобным образом
1 f «/,4 . птгЬ ,,
Z JW sin-—eft.
Db)
*=—, ti=^, f(t)=g(u), E)
7Г 1/
F)
If _, ч П7Г£ _
an = z -^cos ~z~ ^
(8)
Это вычисление мотивирует определение ряда Фурье периодической функции с периодом
1Ь. ' ' '■ ' ' ■■■
9.2. Ряд Фурье общего вида и сходимость 797
Определение. Ряд Фурье и коэффициенты Фурье
Пусть / (t) — кусочно-непрерывная функция, период которой равен 2L, причем она
определена для всех t. Тогда ряд Фурье функции f(t) — это ряд
*п\ а° . \^ ( n7rt i и • n7rt\
/ W ~ у + 2^ I ап cos ~~Г + Ьп sm Г J '
п=1 ^ '
F)
где коэффициенты Фурье {ап}о° и {bn}i° определены так:
ап = -
/(£) cos -у- at
-l L,
K'\,Lm
• n7Ft A*
sm —r- at.
Li
G)
(8)
При n = 0 равенство G) принимает очень простой вид
1 fL
(9)
из которого видно, что постоянный член |ао в ряде Фурье функции / представляет собой
просто среднее значение функции /(£) на интервале [—L, L].
Как следствие задачи 30 из раздела 9.1, мы можем вычислить интегралы в равенствах G)
и (8) по любому другому интервалу длины 2L. Например, если f(t) задана единой формулой
для 0 < t < 2L, иногда более удобно вычислить интегралы
1 f2L
nirt
cos —— at
L/
A0a)
bn = I
>2L ,
f(t) sin —— dt.
о L
A0b)
-2
Рис. 9.2.1. Прямоугольное
колебание (меандр) из примера 1
Пример 1
На рис. 9.2.1 показан график функции прямоугольного колебания
(меандра) с периодом 4. Найдем ее ряд Фурье.
798 Глава 9. Методы рядов Фурье
Решение Здесь L = 2. Кроме того, f(t) = —1, если — 2 < t < 0, в то время как
f(t) = 1, если 0 < t < 2. Следовательно, из равенств G), (8) и (9) имеем
If2 If0 1 Г2
«о = 2 J /(*)rf*=2j_ (-!)<*'+2 J (+!)<** = О,
1 f°
а"= 2]_2(_1)<
nirt _ 1
I cos — dt + -
П7Г£
(+l)cos —— dt =
1 Г 2 . птг£
= т: sin —--
2 П7г 2
+ ■
J-2
2 . nirt
— sin——
П7Г 2
2
n2
:0,
If0, 14 . nnt ^ 1 f2, _ . Tint ^
n=2j_ (-1)sm'y^+2j (+1)sm-^
+
1 Г 2 nirt
_j_ — cos _^
2 птг 2
П7Г
2 П7Г£
cos ——
П7Г 2
0
если п нечетное,
если п четное.
Таким образом, ряд Фурье функции
*п\ 4 V^ 1 • n7rt
sin
7Г ^—' П 2
п нечетное
-К
7Г* 1 . ЗТГ£
sin —- 4- - sm ——
2 3 2
1 . 5тг* \
+ -sm — + ...J. О
(Па)
lb)
Теорема сходимости
Мы хотим подчинить периодическую функцию / таким условиям, которых будет
достаточно, чтобы гарантировать, что ее ряд Фурье фактически сходится к f(t) по крайней мере
для тех значений t, в которых / непрерывна. Вспомните, что функция / называется
кусочно непрерывной на интервале [а, Ь], если существует конечное разбиение интервала [а, Ь]
с конечными точками
а = to < h < £2 < * • • < tn-i <tn = b,
такое что выполнены следующие условия.
1. Функция /непрерывна на каждом открытом интервале U-\ <t<U.
2. В каждой конечной точке U такого подынтервала существует и конечен предел / (t)
при t, стремящемся к U изнутри подынтервала.
9.2. Ряд Фурье общего mm и сходимость 799
Функцию / называют кусочно непрерывной для всех t9 если она кусочно непрерывна
на каждом ограниченном интервале. Из этого следует, что кусочно непрерывная функция
непрерывна (кроме, возможно, изолированных точек) и в каждой такой точке разрыва
существуют односторонние пределы
/(*+)= lim f(u) и /(*-)= lim /(u),
и—*t+ u—+t~
A2)
причем они конечны. Таким образом, кусочно непрерывная функция имеет только
изолированные точки разрыва, в которых терпит конечные скачки, подобные тому, который показан
на рис. 9.2.2.
ЯП
Z(f+)
/
t \
Рис. 9.2.2. Конечный скачок
в (конечной) точке разрыва
Прямоугольное колебание (меандр) и пилообразные функции, с которыми мы
познакомились в главе 7 — типичные примеры периодических кусочно непрерывных функций.
Функция f(t) = tg t представляет собой пример периодической функции (период которой
равен 7г), которая не является кусочно непрерывной, потому что она имеет бесконечные
разрывы. Функция g(t) = sm(l/t) не является кусочнр непрерывной на интервале [—1,1],
потому что ее односторонние пределы в точке t = 0 не существуют. Функция
£, если t
(п целое число),
h(t) = ^ п
< 0 в противном случае,
наинтервале [—1,1] имеет односторонние пределы всюду, но не кусочно непрерывна, потому
что ее точки разрыва не изолированы—точки разрыва этой функции образуют бесконечную
последовательность {l/n}^; кусочно непрерывная функция может иметь только конечное
число разрывов на любом ограниченном интервале.
Обратите внимание, что кусочно непрерывная функция может быть не определена в ее
изолированных точках разрыва. Иными словами, ее можно доопределить произвольно в
таких точках. Например, функция прямоугольного колебания (меандра) / на рис. 9.2.1 кусочно
непрерывна независимо от того, чем являются ее значения в точках... ,—4,-2,0,2,4,6,...,
в которых она разрывна. Ее производная /' также кусочно непрерывна; /'(£) = 0, если t не
равно четному целому числу, если же t равно четному целому числу, то f'(i) не определена.
800 Глава 9. Методы рядов Фурье
Кусочно непрерывная функция / называется кусочно гладкой, если ее производная /'
кусочно непрерывна. Согласно теореме 1 (формулировка следует ниже) ряд Фурье кусочно
гладкой функции сходится всюду. Известны также более общие теоремы о сходимости рядов
Фурье—при более слабых условиях на периодические функции /. Но условие, что / является
кусочно гладкой, просто проверяется, и ему удовлетворяет большинство функций, с
которыми приходится сталкиваться в практических приложениях. Доказательство следующей
теоремы может быть найдено в книге Г. П. Толстова, посвященной рядам Фурье, изданной
в Нью-Йорке в 1976 году). Вот ссылка: G. P. Tolstov, Fourier Series (New York: Dover, 1976).
Теорема 1
Сходимость ряда Фурье
Предположим, что периодическая функция / кусочно гладка. Тогда ее ряд Фурье F) сходится
(а) к значению f(t) в каждой точке, где / непрерывна, и
(Ь) к значению \ [/(£+) + /(£—)] в каждой точке, где / терпит разрыв.
Обратите внимание, что | [/(£+) 4- fit—)] —среднее значение правого и леврго пределов
функции / в точке t. Если / непрерывна в t, то f(t) — f(t+) = f(t—) и потому
/(*) =
/(*+)+/(*-)
A3)
Следовательно, теорему 1 можно перефразировать следующим образом: ряд Фурье кусочно
гладкой функции / сходится для каэюдого t к среднему значению A3). По этой причине
общепринято писать
/(*) = у +
п=1 ^
mrt , . rmt
cos ——h bn sm ——
A4)
с учетом того, что кусочно гладкую функцию / можно переопределить (в случае
необходимости) в каждой ее точке разрыва так, чтобы удовлетворить условию среднего значения,
выраженному равенством A3).
Пример 1
Продолжение
Из рис. 9.2.1 сразу видно, что если to равно четному целому числу, то
lim /(*) = +1 и lim f(t) = -L
t-tf
t-+t~
Следовательно,
Я*о+) + /(*о-)
0.
Обратите внимание, что, в соответствии с теоремой 1, ряд Фурье f(t)
в равенствах A1) явно сходится к нулю, если п равно четному целому
ЧИСЛУ (ПОТОМУ ЧТО Sin П7Г = О). ■
Пример 2
Пусть период функции/^) равен 2, причем/^) = £2,если0 < t < 2.Мы
определяем / (t) при t равных четным целым числам из условия равенства
9.2. Ряд Фурье общего вида и сходимость
801
среднему значению (т. е. равенством A3)); следовательно, f(t) = 2, если
t—четное целое число. График функции / приведен на рис. 9.2.3. Найдем
ряд Фурье этой функции.
о о 4 о- с о о о о о
-4 -2 1 2 4 6 8 10 '
Рис. 9.2.3. Период функции из
примера 2 равен 2
Решение Здесь L = 1, и наиболее удобно интегрировать от t = 0 до t = 2. Тогда
ао
и:
£2<Й =
:Г
Применяя интегральные формулы, приведенные в равенствах B2)-B5)
раздела 9.1, мы получаем
f2
ап = t2 cos П7г£ d£ =
Jo
1 Г2П7Г 2 . / , , U\
= Q Q гг cos гл агл I w = П7г£, £ = — =
П^ТГ5 Jo V П7Г/
1 г 9 12п7Г 4
= Q Q \и sinu — 2sin^ + 2uco8u\ = 0 0;
п^тг5 L Jo n^7rz
г2 -I г2п7г
6П = £2 sin П7г£ eft = Q Q -u2 sin udu =
Jo ™3я-3 Jo
1 Г 2 ~ Л . 12п7Г 4
= Q Q —ircos-uH- 2cosu-|- 2-usin'u = .
7Г*7Г* L JO П7Г
Следовательно, ряд Фурье функции / имеет вид
„, ч 4 4 ^ cosn7rt 4 ^ ~ х
3 7г* ^—' п*
п=1
7Г х—J П
п=1
и по теореме 1 этот ряд сходится к f(t) для всех t.
A5)
Мы можем вывести некоторые интересные следствия из ряда Фурье в A5). Если мы
подставим t = 0 в каждую часть, мы найдем, что
я-'-! + эёз-
3 7Г* ^—' П*
п=1
802 Глава 9. Методы рядов Фурье
Если решим это уравнение относительно ряда, мы получим замечательную сумму
^1,1 1 1 7Г2
п=1
значение которой было найдено Эйлером. Если мы подставим t = 1 в уравнение A5), мы
получим
4 4 ^ (-1)п
/w-'-l + SE-
П=1
а из этого равенства следует, что *
^ п2 22 + 32 42 + 12 U''
71=1
Если мы сложим ряды в равенствах A6) и A7) и затем разделим сумму на 2, то члены для
четных п сократятся и в результате получим
2
^ 1 , 1 1 1 я-
£ ^ = 1 + р + ^ + 7^ + --Т* A8)
п нечетное
9.2. Задачи
В задачах 1-14 даются значения периодической функции f(t) на одном полном периоде; в каждой
точке разрыва значение f(t) определяется из условия среднего значения (равенство A3)). Сделайте
набросок графика функции f и найдите ее ряд Фурье.
1. /(*)
-5 < t < 0;
0<t <5
= (' -3<*<0; 2.f(t) = {°>
\ 2, 0<*<3 \l,
^ —1, 0 < £ < 27Г
5. /(t) = t, -2тг < t < 2тг 6. /(*) = t, 0<t<3
ГО, 0<t<l;
7. /(*) = |t|, -1< t < 1 8. /(*) = I 1, 1< t < 2;
(o, 2<t<3
9. /(t) = t2, -l<t<l 10. /(*) ' °' 2<'<0
■{
*2, 0 < t < 2
7Г£
11. f(t) = cos -—, —1 < t < 1 12. /(t) = sinTrt, 0 < t < 1
13. /(t) Л0' ~1<t<0; 14./W=(°' -27r<*<°=
[sinTrt, 0<t<l l^sint, 0<t<27r
9.2. Ряд Фурье общего вида и сходимость 803
15. (а) Предположим, что период функции / равен 27г, причем f(t) — t2 для 0 < t < 27г. Покажите,
что
л 2 °° j. °°
л/.ч 47Г A^--^COSnt л \~^
п=1 п=1
и сделайте набросок графика функции /, указывая значение в каждой точке разрыва. (Ь)
Найдите суммы рядов в равенствах A6) и A7), зйая сумму ряда Фурье в части (а).
16. (а) Предположим, что период функции / равен 2, причем /(t) = 0, если — 1 < t < 0 и /(£) = t,
если 0 < t < 1. Покажите, что
, . _ 1 2 ^-> cosnirt 1 ^-> (—l)n+1 sinmrt
п нечетное п=1
и сделайте набросок графика /, указывая значение в каждой точке разрыва. (Ь) Найдите сумму
ряда в равенстве A8), зная сумму ряда Фурье в части (а).
17. (а) Предположим, что период функции / равен 2, причем f(t) = t для 0 < t < 2. Покажите,
что :
f (+\ — 1 _ ?L V^ s*n П7Г^
n=l
и сделайте набросок графика /, указывая значение в каждой точке разрыва. (Ь) Подставьте
подходящее значение t, чтобы найти сумму ряда Лейбница.
л 111 7Г
В задачах 18-21 найдите ряд Фурье и постройте график функции с периодом 2п, к которой
сходится каждый из рядов.
smnt 7г — t /л , _ ч ,л v^ (—l)n+ sinnt t
-jp = — @ < t < 2тг) 19. 53 ^
n=l n=l
„л \~^ Sin TOE 7Г — E /л . _ ч ,л V^ 1—±1 Sin TOE E , ч
18. > = —— @ < t < 2тг) 19. > ^—^ = - (-7Г < t < тг)
L^i n 2 v ' *-^ то 2 v '
-л \—v COS Tit 3e2 — 67ГЕ + 27Г2 /л _ N
20'£ —= и @<*<2.)
n=l
„ ^(-l)n+1cosnt 7r2-3t2 , x ,
21-Е^^— = -i2— (-*<«<*)
n=l
22. Предположим, что p(t) — многочлен степени то. Покажите повторным интегрированием по
частям, что
^p(t)g(t)dt = p(t)G1(t)-pf(t)G2(t) +p"(t)G3(t) - ... + (-1)Уп)(е)Сп+1(е),
где 6?fc(£) обозначает fc-ю повторную примитивную (первообразную) Gk(t) = (D~1)kg(t). Эта
формула полезна при вычислении коэффициентов Фурье для многочленов.
23. Применяя интегральную формулу задачи 22, покажите, что
t4 cos tdt = е4 sin t + 4е3 cost - 12t2 sint - 24t cost + 24 sin t + С
и что
[ t4sintdt = -Е4 cost + 4t3 sint + 12t2 cost - 24tsint - 24cos t + C.
804 Глава 9. Методы рядов Фурье
24. (а) Покажите, что для 0 < t < 2п,
п=1 х '
°° ( 3 7Г2\
+ 167Г > [ —г- J Silltlt
^—' \п6 п )
и сделайте набросок графика /, указывая значение в каждой точке разрыва. (Ь) Зная сумму
ряда Фурье в части (а), найдите суммы
V —= — v (~1)n+1 =77г4
2-j п* 90' -Н п4 720'
п=1 п=1
И
^ п4 ~ 96'
п нечетное
25. (а) Найдите ряд Фурье функции /, период которой равен 27Г, причем f(t) = £3, если —7г < t <
< 7г. (Ь) Используя ряд в части (а), найдите сумму
J_l__l_ _ 7Г^
Зз + 5з 73 + ' " ~ 32
и сделайте набросок графика функции /, указывая значение в каждой точке разрыва, (с)
Попытайтесь найти значение суммы ряда
^ п3 23 + З3 + 43 + "
путем подстановки подходящего значения t в ряд Фурье из части (а). Успешна ли ваша попытка?
Объясните.
9.2. Приложение. Вычисление коэффициентов
Фурье с помощью компьютерной алгебры
Система компьютерной алгебры может очень облегчить вычисления коэффициентов Фурье
заданной функции /(t). В случае функции, которая определена "кусочно", мы должны
позаботиться о том, чтобы "разбить" интеграл в соответствии с различными интервалами
определения функции. Мы проиллюстрируем данный метод, вычислив ряд Фурье функции
прямоугольного колебания (меандра), период которой равен 27г, которая была определена
на интервале (—7г, 7г) равенством
Г-1, если -,<t<0,
v ' [+1, если 0<г<тг.
В этом случае функция определена различными формулами на двух различных интервалах,
так что каждый интеграл (коэффициент в ряде Фурье) от — 7г до 7г должен быть представлен
9.2. Ряд Фурье общего вида и сходимость 805
в виде суммы двух интегралов:
1 Г° If
ап — — (—1) cos ntdt-i— (-hl)cosntdt,
^ J-тг *"Jo
If0 1 Г
bn — — \ (—l)sinntdt-i— (-hi) sin ntdt.
TTJ-tt ^ JO
B)
Мы можем определить коэффициенты в B) как функции от п с помощью команд системы
Maple
а := n -> (l/Pi)*(int(-cos(n*t) , t=-Pi..O) +
• int D-cos (n*t) , t=0..Pi)):
b := n -> (l/Pi)*(int(-sin(n*t), t=-Pi..O) +
int D-sin (n*t) , t=0 . . Pi) ) :
или с помощью команд системы Mathematica
a[n_] := A/Pi)*(Integrate[-Cos[n*t] , {t, -Pi, 0}] +
tIntegrate[+Cos[n*t], {t, 0, Pi}])
b[n_] := A/Pi)*(Integrate[-Sin[n*t], {t, -Pi, 0}] +
Integrate[+Sin[n*t] , {t, 0, Pi}])
Поскольку функция f{t) в равенстве A) нечетна, мы естественно находим, что ап = 0.
Следовательно, команды системы Maple
fourierSum := sum(b(n)*sin(n*t), n=1..9);
plot(fourierSum, t=-2*Pi..4*Pi);
или команды системы Mathematica
fourierSum = Sum[b[n]*Sin[n*t], {n,l,9}]
Plot[fourierSum, {t, -2*Pi, 4*Pi}];
приводят к частичной сумме
Е4 / . sin3£ sin5£ sin7£ sin 9A
bnsmn*=-^mt+ —+ — + — + —J
71=1 Ч '
и генерируют график, подобный одному из приведенных на рис. 9.1.3. Соответствующие
команды пакета MATLAB полностью аналогичны.
Чтобы попрактиковаться в этом духе в вычислениях с рядами Фурье с помощью
пакетов символических преобразований, вы можете начать с того, что проверите ряд Фурье,
рассчитанный вручную в примерах 1 и 2 из этого раздела. Затем было бы полезно решить
задачи 1-21. Наконец, треугольная волна и трапецеидальные волновые функции с периодом
27г, показанные на рис. 9.2.4 и 9.2.5, имеют особенно интересные ряды Фурье, которые мы
приглашаем вас найти самостоятельно.
806 Глава 9. Методы рядов Фурье
Рис. 9.2.4. Треугольная волна Рис. 9.2.5. Трапецеидальная волна
93. Ряды Фурье по синусам и косинусам
Некоторые свойства функций очень хорошо отражаются (и хорошо заметны) в их ряде Фурье.
Функция /, определенная для всех t, называется четной, если
> n-t) = m) со
для всех t; f называется нечетной, если
> /(-«) = -/(«) B)
для всех t. Первое условие подразумевает, что график у = f(t) симметричен относительно
оси у, тогда как условие B) подразумевает, что график нечетной функции симметричен
относительно начала координат (рис. 9.3.1). Функции f(t) = t2n и g(t) = cost — четные
функции, тогда как функции f(t) — £2n+1 и g{t) = sin t — нечетные. Мы увидим, что ряд
Фурье четной периодической функции имеет только члены с косинусами и что ряд Фурье
нечетной периодической функции имеет только члены с синусами.
Сложение и вычитание площадей, точнее, присваивание им знаков, как показано на
рис. 9.3.2, напоминает нам о следующих основных свойствах интегралов четных и нечетных
(а) (Ъ)
Рис. 9.3.1. Функция: а—четная; b — нечетная
9.3. Ряды Фурьё по синусам и косинусам 807
-а
*
;1;|||Ш|
^Ш:й1й^
тттттт
а
/четная
—а
i
a
f нечетная
(a) (b)
Рис. 9.З.2. Область под графиком четной (а) и нечетной (Ь) функции
функций по интервалу [—а, а], которьш расположен симметрично относительно начала
координат.
га га
Если / четная: f(t) dt = 2 / (*) eft.
J-a J0
Если / нечетная: /(£) dt = 0.
J—a
C)
D)
Эти факты просто проверить аналитически (задача 17).
Из равенств A) и B) немедленно следует, что произведение двух четных функций
является четной функцией, как и произведение двух нечетных функций; произведение же четной
функции и нечетной функции является нечетной функцией. В частности, если f(t) —
четная периодическая функция, период котррой равен 2L, то f(t) соб(птгЬ/Ь) является четной
функцией, тогда как f(t)mn(n7rt/L) представляет собой нечетную функцию, потому что
функция косинус является четной, а функция синус нечетна. Поэтому когда мы вычисляем
коэффициенты Фурье функции /, мы получаем
1 [L Л/,ч rmt
0,71 = L '*' C°S IT
L Jo ^
Eа)
n==l\ *®Sm ~L~ =
Eb)
с учетом равенств C) и D). Следовательно, ряд Фурье четной функции /, период которой
равен 2L, имеет только члены с косинусами:
л/,ч Go \"^ Tint
/(*) = у+ 2^anCOS~
п=1
(/ четная),
F)
808 Глава 9. Методы рядов Фурье
причем значения ап определяются равенствами Eа). Если f(t) нечетная, то f(t) cos(ri7rt/L)
нечетная, a f(t) sm(n7rt/L) — четная, так что
1 [L WKt
ап = — f(t) cos -—- dt = 0 Ga)
L J-L L
n = ZJ /(*)sin-Y"*=^J f(t) sin —dt. Gb)
Следовательно, ряд Фурье нечетной функции /, период которой равен 2L, имеет только
члены с синусами:
f(t) = ^2bn sin ~i~ (f нечетная)> (g)
n=l
причем значения коэффициентов Ъп определяются равенствами GЬ).
Четные и нечетные продолжения
Все наши более ранние обсуждения и примеры мы начинали с рассмотрения периодической
функции, определенной для всех t\ ряд Фурье такой функции определен однозначно
формулами для коэффициентов Фурье. Однако во многих практических приложениях встречаются
функции /, первоначально определенные только на интервалах вида 0 < t < L, и мы хотим
представить значения таких функций на интервалах такого вида рядами Фурье для
функций, периоды которых равны 2L. Первый шаг: необходимо продолжить такую функцию /
на интервал — L < t < 0. Имея такое продолжение, мы можем продолжить / на всю
вещественную ось с условием соблюдения периодичности f(t + 2L) — f(t) (и использовать
свойство среднего значения, если возникнут какие-либо разрывы). Но то, как мы
определяем / для — L < t < 0 зависит от нашего выбора, и представление ряда Фурье для f(t) на
@, L), которое мы получаем, будет зависеть от этого выбора. Несомненно, различные
продолжения / на интервал (—L, 0) будут иметь различные ряды Фурье, которые сходятся к той
же самой функции f(t) в первоначальном интервале 0 < t < L, но сходятся к различным
продолжениям / на интервале — L < t < 0.
На практике, если данная функция f(t) определена для 0 < t < L, мы вообще делаем
один из двух естественных выборов — мы расширяем область определения (т. е. продлеваем
/), притом так, чтобы получить или четную функцию, или нечетную функцию. Четное
продолжение с периодом 2L функции / — это функция /#, определенная равенством
\f(-t),
если 0<t<L;
1 £( ^ если — L < t < 0,
а также равенством /#(£ + 2L) = /^(t) для всех t. Значения /я(£) для t, кратных L,
несущественны, потому что они не могут повлиять на ее ряд Фурье /е- Ряд Фурье четного
продолжения /#, определенный равенствами E) и F), будет содержать только члены с
косинусами и называется рядом Фурье по косинусам первоначальной функции /.
9.3. Ряды Фурье по синусам и косинусам 809
Нечетное продолжение с периодом 2L функции / — это функция /о, определенная
равенством
Ш = {т; Л если 0<t<L> do)
\-/(-*)> если-£<г<0, V '
а также равенством fo(t -4- 2V) = fo(t) для всех t. Ряд Фурье нечетного продолжения /о,
данный равенствами G) и (8), будет содержать только члены с синусами и называется/яж)ш*
Фурье по синусам первоначальной функции /.
Определение. Ряды Фурье по косинусам и синусам
Предположим, что функция f(t) кусочно непрерывна на интервале
Фурье функции / по косинусам — это ряд
оо ,
w *и\ ao . V n7rt
> /W = — + 2^,ancos —,
n=l
причем
2 [L ,, ч nnt fj
\ > Q>n = y \ / W cos ~T~ dt'
L Jo ^
Ряд Фурье функции / по синусам — это ряд
оо ,
> /w = 2^6"sin~jF7'
n=l
причем
[0,L]. Тогда ряд
(И)
A2)
A3)
A4)
Принимая предположение, что / является кусочно-гладкой и удовлетворяет условию
среднего значения f(i) = \ [f(t+) + /(£—)] в каждой из ее изолированных точек разрыва,
по теореме 1 из раздела 9.2 получаем, что каждый из двух рядов вA1)иA3) сходится
к f(t) для всех t в интервале 0 < t < L. Вне этого интервала ряд по косинусам в A1)
сходится к четному продолжению функции / с периодом 2L, тогда как ряд по синусам в A3)
сходится к нечетному продолжению функции / с периодом 2L. Во многих важных случаях
мы не имеем никакого беспокойства со значениями /вне первоначального интервала @, L),
и поэтому выбор между A1) и A2) или A3) и A4) определен тем, предпочитаем ли мы
представлять f(t) в интервале @, L) рядом по косинусам или рядом по синусам. (Впрочем,
в примере 2 ситуация диктует выбор между рядом Фурье по косинусам и рядом Фурье по
синусам для представления заданной функции.)
Пример 1
Предположим, что f(t) = t для 0 < t < L. Найдем ряд Фурье по
косинусам и ряд Фурье по синусам для функции /.
810 Глава 9. Методы\ рядов Фурье
Решение По формуле A2) имеем
а0
-![L
"bJo
2
tdt = -
L/
=-t'
Jo
2L
fL, rmt.+ 2L fn7r
£ cos —=— at ~ о о i6Costtaw==.
Jo i n * Jo
4L
2L Г . 1П7Г
= 0 0 \usmu + cosгг =
7Г7Г^ L Jo
для нечетных п;
0 для четных п.
Таким образом, ряд Фурье функции / по косинусам
t
L 4L (
тгё 1 Зтг£ 1 5тг*
|CosT^_cbs^ + -cos— + .
A5)
для 0 < t < L. Затем, по формуле A4) имеем
2 Г . nnt f 2L ГП7Г .
&n = т *Sln ~т~ «* = о о usmudu =
£ Jo ^ n ^2 Jo
= -ТГ-=г -ttcosu + sinuf = —(-l)n+1.
Tl4/Kz I J0 П7Г
Таким образом, ряд Фурье функции / по синусам:
2L / . nt 1 . 2nt 1 . Зтг* \
г = Т\?тТ-28т-Г + Гт-Ь-''')
A6)
для 0 < t < L. Ряд в равенстве A5) сходится к нечетному продолжению
/ с периодом 2L, показанному на рис. 9.3.3; ряд в равенстве A6) сходится
к четному продолжению / с периодом 2L, показанному на рис. 9.3.4. ■
2L 3L AL
Рис. 9.3.3. Четное
продолжение / с периодом 2L
/:,
/ V
/*,
'/
У 1 ьг
х 5lAl
Рис. 9.3.4. Нечетное
продолжение / с периодом 2L
Почленное дифференцирование рядов Фурье
В этом и в .последующих разделах мы хотим рассмотреть применение рядов фурье к,
решению дифференциальных уравнений. Чтобы подставить ряд Фурье вместо неизвестной
9.3. Ряды Фурье по синусам и косинусам 811
зависимой переменной в дифференциальное уравнение и проверить, является ли он
решением, мы сначала должны продифференцировать ряд и вычислить производные, которые
входят в уравнение. Здесь требуется осторожность; почленное дифференцирование
бесконечного ряда переменных членов3 допустимо далеко не всегда. Теорема 1 дает достаточные
условия для законности почленного дифференцирования ряда Фурье.
Теорема 1 ЩЩ
тШМшшт
Предположим, что функция / является непрерывной для всех t9 периодической с периодом
2L и что ее производная /' является кусочно гладкой для всех t. Тогда ряд Фурье функции
/' — это ряд
л// ч V^ / Ю7Г . MTt П7Г, П7ГА
/ № = 2^ l~TanSmlT + T nCOS~zrJ'
71=1 ^ '
полученный почленным дифференцированием ряда Фурье
л/ ч GO ^ / Tl7rt , . П7ГА
/w = у + 2^ (ап cos ~ + п sin 17)'
п=1 ^ '
A7)
A8)
Доказательство. Основное утверждение теоремы состоит в том, что результат
почленного дифференцирования—ряд в равенстве A7)—и в самом деле сходится к /' (t) (с обычным
условием о среднем значении). Но поскольку /' является периодической и кусочно гладкой,
по теореме 1 из раздела 9.2, ряд Фурье /' сходится к /'(t):
оо /
Л*) = ? + £(«»
Tint _ .
cos —— -f Cn sin
П7ГА
A9)
Поэтому, чтобы доказать теорему 1, достаточно показать, что ряды в равенствах A7) и A9)
идентичны. Мы докажем это при дополнительном предположении, что /' непрерывна всюду.
Тогда
ao = zI_V'(i)di=iN!,=0'
потому что f(L) = /(—L) по условию периодичности и
1 fL ,/, ч ТИП ^
ап = Т\ / W cos "Г" dt =
П7Г 1 fL Л/ х
1 Г.,. nnt
= L\mCOS —
+
• n7rt м
sm —— dt
— интегрирование по частям. Из этого следует, что
717Г
3 Напомню, что (бесконечный) ряд, члены которого представляют собой переменные величины, называется
функциональным рядам. — Примеч. ред. у.шу
812 Глава 9. Методы рядов Фурье
Подобным образом мы найдем
я -- —
Рп — j 0"гы
и потому ряды в A7) и A9) действительно идентичны. А
Принимая во внимание, что предположение о том, что производная /' является
непрерывкой — это просто удобство, доказательство теоремы 1 может быть усилено так, чтобы
допустить наличие изолированных точек разрыва у функции /'. Однако важно обратить
внимание, что заключение теоремы 1, вообще говоря, неверно, если сама функция / разрывна.
Рассмотрим, например, ряд Фурье
2L / nt 1 . 2-rrt 1 . Зтг£ \
t = — I sin —— - sin ——I- - sin — • • • J , A6)
—L < t < L, разрывной пилообразной функции, график которой показан на рис. 9.3.4.
Выполнены все условия теоремы 1, кроме непрерывности /, причем / имеет только
изолированные точки разрыва в виде скачков скачков. Но ряд
/ TTt 2<7Tt ЗТГ* \
^cos__cos_+cos__...J?
B0)
полученный почленным дифференцированием ряда в равенстве A6), расходится (например,
при t — 0 и при t = L) и поэтому почленное дифференцирование ряда в равенстве A6)
недопустимо.
В противовес этому давайте рассмотрим [непрерывную] треугольную волновую
функцию /(£), график которой показан на рис. 9.3.3, причем f(t) = \t\ для — L < t < L. Эта
функция удовлетворяет всем условиям теоремы 1, так что ее ряд Фурье
/(*)
L 4L / irt 1 Зтг* 1 5тг* \
г-^Г^ + З^08— + 5*COS-r + '--J A5)
можно дифференцировать почленно. В результате получаем ряд
/'(*) =-(smr + -sm— + -sm— + ...j, B1)
который является рядом Фурье функции, изображающей прямоугольное колебание
(меандр), период которого равен 2L. Этот ряд принимает значение— 1 для— L < t < 0и+1для
0<t<L.
Решение дифференциальных уравнений с помощью рядов Фурье
В остальной части этой главы и в главе 10 нам часто придется решать задачи на граничные
значения (т. е. задачи с граничными условиями (условиями в конечных точках)) общего вида
ах" + Ьх' + сх = f(t) @ < t < L); B2)
х@) = x(L) = 0, B3)
где задана функция f(t). Мы могли бы попробовать применить методы главы 3, пытаясь
найти решение этой задачи следующим способом.
9.3. Ряды Фурье по синусам и косинусам 813
1. Сначала найти общее решение хс = с\х\ -4- С2Х2 соответствующего однородного
дифференциального уравнения.
2. Затем найти какое-нибудь частное решение хр неоднородного уравнения B2).
3. Наконец, определить константы а и С2 так, чтобы х = хс -4- хр удовлетворяло
граничным условиям B3).
Во многих задачах более удобен и более полезен следующий метод рядов Фурье. Мы
сначала подходящим способом продолжаем функцию f(t) так, чтобы она была определена
также на интервале— L < t < 0, а затем продолжаем ее на всю вещественную ось с помощью
условия периодичности f(t + 2L) = /(£). Тогда, если функция / окажется кусочно гладкой,
мы будем иметь ряд Фурье
/(*) = -у + 2^ (AnCOSт + nSin"Г)
B4)
который имеет коэффициенты {Ап} и {Вп}; эти-то коэффициенты мы сможем вычислить
и действительно вычислим. Затем мы предполагаем, что дифференциальное уравнение B2)
имеет решение x(t) с рядом Фурье
/ ч ао \г^ ( П7Г^ , . nirt\
x{t) = — + 2^ I an c°s -J- •+" °n sin ~T~ ) '
n=l ^ ■■ '
B5)
который можно дважды продифференцировать почленно. Мы попытаемся определить
коэффициенты в равенстве B5). Для этого мы сначала подставим ряды в равенствах B4)
и B5) в дифференциальное уравнение B2) и затем приравняем коэффициенты при
подобных членах. Если эту процедуру удастся выполнить таким способом, что полученный ряд
в уравнении B5) также будет удовлетворять и граничным условиям (условиям в конечных
точках) в B3), то мы получим "формальное решение в виде ряда Фурье" первоначальной
задачи с граничными условиями (условиями в конечных точках); такое решение, разумеется,
должно быть подвергнуто проверке на законность почленного дифференцирования. Пример
2 иллюстрирует этот процесс.
Пример 2
Решение
Найдем формальное решение в виде ряда Фурье задачи с граничными
условиями (условиями в конечных точках)
х" Л- 4х = 4*, B6)
х@) = хA) = 0. B7)
Здесь f(t) = At для 0 < t < 1. Критическим является первый шаг —
мы его не делали (в явном виде) в предыдущей схеме — нужно выбрать
периодическое продолжение f(t) так, чтобы каждый член ряда Фурье этой
функции удовлетворял условиям в конечных точках B7). Для этой цели
мы выбираем нечетное продолжение с периодом 2, потому что каждый
член вида sinn7r£ удовлетворяет условиям B7). Тогда из ряда A6) при
L = 1 мы получаем ряд Фурье
8
7Г £-i
(-1)
п+1
sin Tint
n=l
п
B8)
814 Глава 9. Методы рядов Фурье
для 0 < t < 1. Мы поэтому ожидаем получить решение в виде ряда по
синусам
x{i) = Yj bnsin.riwti
B9)
71=1
* поскольку любой такой ряд удовлетворит условиям в конечных
точках B7). Когда мы подставим ряды B8) и B9) в уравнение B6), получим
(-1)
п+1
Е(—п27г2 -f 4)bn smnirt = — > -— smnnt
7Г *—' П
C0)
n=l
n=l
Мы затем приравниваем коэффициенты при подобных членах в
уравнении C0). Это приводит к равенству
Ьп =
8-(-l)n+1
717ГD — П27Г2) '
так что формальное решение в виде ряда Фурье имеет вид
8 ^ (-l^+isinmrt
Ж()~тг^ пD-пЧ2) '
В задаче 16 мы просим вас найти точное решение
, ч sin2t /Л . . ^ч
x(t) = * - -—■ @ < * < 1)
v y sin2 \ - - )
C1)
C2)
и проверить, что C1)—ряд Фурье нечетного продолжения этого решения
с периодом, равным 2.
Вычерченная штриховой линией кривая на рис. 9.3.5 является
графиком суммы 10 членов ряда Фурьр C1). Вычерченная сплошной линией
кривая для 0 ^ t ^ 2 — график точного решения C2). ■
0.4
0,2
н 0.0
-0.2
-0.4
1
/ Ч
-/ V
/ \
1 \
1 \
Г \
i i i i
I I I
/' \ ^
/ \
/ \ -
/ \
/ \-
/ Ч
1' Т
. 4 1
III
-1.0 0.0 1.0 2.0
t
Рис. 9.3.5. График решения
в примере2
9.3. Ряды Фурье по синусам и косинусам
Почленное интегрирование ряда Фурье
815
Согласно теореме 2 ряд Фурье кусочно непрерывной периодической функции всегда можно
интегрировать почленно, даже независимо от того, действительно ли он сходится!
Доказательство намечено в задаче 25.
Теорема 2
Пиленное интегрирование рядр^ Фурье
yS^im^Mdu^kkk^^kiJiiiu^JA
k#^?«Mfe^^ -- 4.4/«:-4;rfU/tv. ■ т-:Ь, '-„к.-,*
Предположим, что /—кусочно-непрерывная периодическая функция с периодом 2L и рядом
Фурье
/(*)■
ао v^ / П7Г^ , • nnt\
у + 2_Д ап cos ~[~ + bn sin ~X~ J '
n=l ^ '
который не обязательно сходится. Тогда
П7Г
J° 2 ^
. гатг* , / Tint
an sin — on I cos ■
bn ( cos — - 1 j ,
C3)
C4)
причем ряд в правой части сходится для всех t. Обратите внимание, что ряд в уравнении C 4)—
результат почленного интегрирования ряда C3). А
Пример 3
Давайте попытаемся проверить заключение теоремы 2 в случае, когда
функция f(t) имеет период 27Г, причем
/(*)
-1, -7Г<£<0;
+ 1, 0 < t < 7Г.
В примере 1 из раздела 9.1 мы нашли ряд Фурье функции /:
f(t) = - ( sin* + - sin3£ + - sin5t + • • • ) .
7Г \ 3 5 /
C5)
C6)
Из теоремы 2 тогда следует, что
F(t)=\*f(8)d8 =
Jo
ш
Sin S + - Sin 3s + - Sin 05 +
3 5
Л ds =
4 Г 1 1
= - A - cost)+ ^j(l-cos3t) + -j(l-cos5t) + -
Таким образом,
4 / 1 1
cost 4- ts-cos3t 4- 37 cos5t +
7Г \ 3J Ь1
C7)
816 Глава 9. Методы рядов Фурье
С другой стороны, непосредственное интегрирование функции C5) дает
Jo [ £, 0 < t < 7Г.
В примере 1 данного раздела мы установили (при L = 7г), что
7Г 4 / 1 1 \
|*| = ( cost + ~2 cos3£ + ~2 cos5t + • • • 1 . C8)
В разделе 9.2 мы установили равенство A8), согласно которому
+ З2 + 52 + 72 + "" " 8 '
так что из этого следует, что ряды в равенствах C7) и C8) действительно
идентичны. ■
В задачах 1-10 задана функция /(£), определенная на интервале 0 < t < L. Найдите
расположенные по косинусам и по синусам ряды Фурье функции f и сделайте набросок графиков двух
продолжений функции /, к которым сходятся эти два ряда.
1. /(*) = 1, 0 < t < тг 2. /(£) = 1-£,0<£<1
3. f(t) = l-t,0<t<2 4. f(t)
it, 0<t<;i;
[2-t, l^t<2
!0, 0 < t < 1;
1, К t < 2; 6. f(t) = t2, 0 < t < тг
0, 2 < £ < 3
7. /(£) = £(тг - £), 0< £ < тг 8. /(£) = £ - £2, 0 < £ < 1
*/(*)=int,o<t<ir io./w=(;int' °<<=:
10, 7Г S £ < 27Г
В задачах 11-14 найдите формальные решения в виде ряда Фурье задач, в которых значения заданы
в конечных точках.
11. х" + 2х = 1, ж@) = х(п) = 0 12. х" - 4х = 1, ж@) = яг(тг) = 0
13. х" + ж = £, ж@) = жA) = 0 14. х" + 2x = t, х@) = хB) = 0
15. Найдите формальное решение в виде ряда Фурье задачи, в которой значения заданы в конечных
точках
х" + 2х = £, х@) = ж'(тг) = 0.
(Указание. Ищите решение в виде ряда Фурье по косинусам, в котором каждый член
удовлетворяет условиям в конечных точках.)
16. (а) Найдите решение x(t) = £ — (sin 2£)/(sin 2) задачи, в которой значения заданы в конечных
точках
х" + 4ж = 4£, х@) = хA) = 0.
(Ь) Покажите, что ряд в уравнении C1) представляет собой ряд Фурье по синусам решения из
части (а).
9.3. Ряды Фурье по синусам и косинусам 817
17. (а) Предположим, что / — четная функция. Покажите, что
(Ь) Предположим, что / — нечетная функция. Покажите, что
[° f(t)dt= \af(t)dt.
J-a JO
я функция. Покажите, чт(
Г f(t)dt=-\amen.
J-a Jo
18. В примере 2 из раздела 9.2 был найден ряд Фурье функции /, период которой равен 2, причем
/(£) = t2 для 0 < t < 2:
n=l n—1
Покажите, что "почленная производная" этого ряда не сходится к /'(£).
19. Начните с ряда Фурье
t = 2 >^ Sill nt, —7Г < t < 7Г,
^—' г?.
п
п=1
и последовательно проинтегрируйте его почленно три раза, в результате чего получится ряд
24 12 ^^ п4 ^ п4
п=1 п?=1
20. Подставьте t = 7г/2 и t = 7г в ряд задачи 19 и вычислите суммы
4 _~ (-1)"*1 _ 77Г4
w Л _4
V — = — V
Z^ n4 go' Z-.
п4 720'
п=1 п=1
И
^4
З4 + 54 + 74 + ' *' ~ 96 *
21. {Располоэюенный по синусам ряд нечетного продолэюения функции, график которой
симметричен относительно вертикальной оси, проходящей через абсциссу, равную половине полупе-
риода.) Пусть /(£) задана для 0 < t < L. Мы определим F(t) для 0 < t < 2L следующим
образом:
F(t) = lf®> 0<t<L;
К } \fBL-t), L<t<2L.
Таким образом, график F(t) симметричен относительно прямой t = L (рис. 9.3.6). Тогда ряд
Фурье по синусам функции F с периодом 4L имеет вид
F(t) = ±bnSin^,
П=1
где
Ьп = i Г т sin Srdt+1 \[L fBL " *} sin жdL
Подставьте s = 2L — t во второй интеграл и убедитесь, что для 0 < t < L
л*)= £ 6и!
. wnt
sin ■
2L
п нечетное
818 Глава 9. Методы рядов Фурье
Рис. 9.3.6.
даче 21
Построение F на основе / в за-
где
2 fL
sin -тгр dt (n нечетное).
22. {Располоэюенный по косинусам ряд нечетного продолэюения функции, график которой
симметричен относительно точки оси абсцисс, координата которой равна половине полупериода.)
Пусть f(t) задана для 0 < t < L, давайте определим G(t) для 0 < t < 2L следующим образом:
G(t) =
fit),
О < t < L;
-/BL-t), L<t<2L.
Считая период равным 4L, вычислите ряд Фурье функции G(t) по косинусам. Зная его,
получите (для 0 < t < L)
f(t) = ^jT an cos ■
п нечетное
где
2L'
a» = lf0/(*)
Tint .,
cos —- dt
2JL
(n нечетное).
23. Дано: f(t) = t, 0 < t < -к. Найдите расположенный по синусам рад нечетного продолжения
функции, график которой симметричен относительно вертикальной оси, проходящей через
абсциссу, равную половине полупериода (задача 21):
(_1)("-1)/2
7Г
/<*) = ! Е
п нечетное
П*
nt
■siny.
24. Рассмотрим задачу с условием на значения в конечных точках
х" — х = £, х@) = 0, ж'Gг) = 0.
Обратите внимание, что любая функция, равная какому-нибудь постоянному числу,
умноженному на sin(n£/2), (при нечетном п) удовлетворяет условиям в конечных точках. Следовательно,
можно использовать расположенный по синусам ряд нечетного продолжения функции, график
которой симметричен относительно вертикальной оси, проходящей через абсциссу, равную
половине полупериода, полученный в задаче 23, чтобы получить формальное решение в виде
ряда Фурье
32 ^ (-1)("+0/Д . т
*<*> = ? £
n2(n2 + 4) Sm 2'
п нечетное
25. В этой задаче мы намечаем доказательство теоремы 2. Предположим, что функция f(t) кусочно
непрерывна с периодом 2L. Определим
г*
F(t) = { [/(*) " 5«о] da,
Jo
9.3. Ряды Фурье по синусам и косинусам 819
где {ап} и {Ьп} обозначают коэффициенты Фурье функции /(£). (а) Покажите
непосредственно, что F(t + 2L) = F(t), так что функция F непрерывна с периодом 2L и поэтому имеет
сходящийся ряд Фурье
F(t) = — + 2^ ( An cos — + Бп sin — J
(b) Предположим, что п ^ 1. Покажите прямым вычислением, что
L и L
Ап = On И Вп = CLn-
(c) Таким образом,
f(s) ds = -ао + -До + У^ — ( ctn sin — bn cos —- ) .
Jo 2 2 n^l П7Г V L L '
Наконец, подставьте t = 0 и убедитесь, что
-Ао = > —Ьп.
2 ^—' П7Г
71=1
9.3. Приложение. Ряд Фурье кусочно-гладких
функций
Большинство систем компьютерной алгебры разрешает использовать единичные
ступенчатые функции для эффективного дифференцирования ряда Фурье "кусочно-определенных"
функций. Здесь мы иллюстрируем использование Maple для этой цели. Без труда можно
написать и версии этих программ для систем Mathematica и MATLAB — потребуется всего
лишь рутинная адаптация приведенных ниже программ.
Пусть единичная функция unit(t, а, Ь) имеет значение 1 на интервале а ^ t < b, а во
всех остальных точках ее значение равно 0. Тогда мы можем определить данную кусочно-
гладкую функцию f(t) как "линейную комбинацию" различных единичных функций,
соответствующих отдельным интервалам, на которых данная функция является гладкой, причем
единичная функция для каждого интервала умножается на выражение (правую часть
формулы), определяющее /(£) на данном интервале. Рассмотрим, например, четную функцию
с периодом 27Г, график которой показан на рис. 9.3.7. Эта "трапецеидальная волновая
функция" определена для 0 < t < 7г равенством
яо-^,(«,о,|) + (|-«)-Н-т) + (-1)-"(''Т.')- о)
Единичная ступенчатая функция (функция Хевисайда) (со значениями 0 для t < 0 и 1 для
t > 0) имеется в пакете Maple и там она называется "Heaviside function" (функция
Хевисайда). Например, Heaviside(—2) = 0 и HeavisideC) = 1. Единичная функция на интервале
[а, Ь] может быть определена так:
unit := (t,a,b) —> Heaviside(t-a) - Heaviside(t-b) :
820 Глава 9. Методы рядов Фурье
/7Я _7С\
Рис. 9.3.7. Четная трапецеидальная
волновая функция с периодом 27Г
Тогдатрапецеидальную волновую функцию вуравненииA) можно определить для 0 ^ t ^ 7г
равенством
f := t -> (Pi/3)*unit(t, 0, Pi/6) +
(Pi/2 - t)*unit(t, Pi/6, 5*Pi/6) +
(-Pi/3)*unit(t, 5*Pi/6, Pi):
Мы можем теперь вычислить коэффициенты Фурье в ряде по косинусам f(t) = |ао +
+ S an cos п^-
a := n -> B/Pi)*int(f(t)*cos(n*t), t=0..Pi);
Мы тогда найдем, что общий вид частичной сумма ряда может быть определен так:
fourierSum := а@)/2 + sum(a(n)*cos(n*t) , n=1..25);
fourierSum : = 2
V^cos(t) 2 V^cosEt) 2 y/b cosGt)
7Г
25
49
2 >/3cos(llt) 2 >/3cosA3t)' 2 л/3 cos(m)
121
169
289
7Г
2 >/3cosA9*) 2 \/3cosB3f) 2* л/3 cosB5t)
361 7Г 529 7Г
Таким образом, мы находим замечательный ряд Фурье
625
7Г
f(t)= 2V3y^(±)cosnt
п'
B)
в котором знаки чередуются по образцу Н Н 1—Ь , а суммирование выполняется по
всем нечетным положительным целым числам п, которые не кратны числу 3. Вы можете
ввести команду
plot(fourierSum, t=-2*Pi..3*Pi);
9.3. Ряды Фурье по синусам и косинусам 821
и проверить, что этот ряд Фурье является рядом Фурье функции, график которой приведен
на рис. 9.3.7.
Вы можете затем применить этот метод для нахождения рядов Фурье следующих
функций, период которых равен 2-к.
1. Четная функция прямоугольного колебания (меандра), график которой показан на
рис. 9.3.8.
2. Четная и нечетная треугольные волновые функции, графики которых показаны на
рис. 9.2.4 и 9.3.9.
3. Нечетная трапецеидальная волновая функция, график которой показан на рис. 9.2.5.
Затем найдите подобным способом ряд Фурье некоторых кусочно-гладких функций по
вашему собственному выбору^ возможно, некоторые из них будут иметь другие периоды (а не
27г) и не будут ни четными, ни нечетными.
1
-к
~*
«
~-А 1
(f.i)
>
(!• -о
1
п
i i
2я
(¥. -о
Рис. 9.3.8. Четная функция прямоугольного
колебания (меандра) с периодом 27Г
1
V
Е
/
/
/
к
2
\ <2*- !> д
\ / \
\ / \
Л 1 / 1
\ я / 2я
\/
V
Рис. 9.3.9. Четная треугольная волновая
функция с периодом 27г
822 Глава 9. Методы рядов Фурье
9.4. Приложения рядов Фурье
Мы рассматриваем сначала движение материальной точки заданной массы т на пружине
с константой Гука к под влиянием периодической внешней силы F(t), как показано на
рис. 9.4.1. Смещение x{t) материальной точки от положения равновесия удовлетворяет
знакомому уравнению
тх" + kx = F(t). A)
Общее решение уравнения A) имеет форму
x(t) = с\ cosu;o* 4- С2 sinujot 4- xp(t), B)
где ujo = y/k/m — собственная частота системы, a xp(t) — частное решение уравнения A).
Значения с± и с^ определяются начальными условиями. Здесь мы хотим использовать ряд
Фурье, чтобы найти периодическое частное решение уравнения A). Мы обозначим его через
xsp(t) и называем устойчивым периодическим решением.
Положение
Рис. 9.4.1. Система, состоящая
из тела заданной массы,
закрепленного на пружине, на которую
действует внешняя сила
Мы предполагаем для простоты, что F(t) — нечетная функция с периодом 2L, так что ее
ряд Фурье имеет вид
F(t) = f^Bnsm^. C)
71=1
Если п-к/L не равно о>о ни для какого положительного целою числа п, мы можем найти
устойчивое периодическое решение в виде
оо .
^sP (t) = ]Р Ьп sin —, D)
n=l
подставляя ряды из равенств C) и D) в уравнение A) — так мы найдем коэффициенты
в равенстве D). Пример 1 иллюстрирует эту процедуру.
Пример 1
Предположим, что т = 2 кг, к = 32 Н/м и что F(t) является нечетной
периодической силой с периодом 2 с, причем в одном периоде ее значение
дается формулой
= Г+юн,
\-10H,
'—' если0<*<1;
v ' л 1ПТТ если 1<«2.
Найдем устойчивое периодическое движение xsp (t)
9.4. Приложения рядов Фурье
823
Решение Графикпериодическойвынуждающейфункции^(£) показаннарис. 9.4.2.
По сути тем же самым вычислением, что и в примере 1 из раздела 9.1, мы
найдем ряд Фурье функции F(t)
„, ч 40 v-^ sinmr£
nt) = - £ —;
п нечетное
F)
заметьте, что он содержит только члены, соответствующие нечетным п.
Подставив этот ряд и
#sp(£) = 2Z bnSinn7r£
G)
п odd
(пробное решение, аналогично содержащее только члены с нечетными
номерами) в уравнение A) при га = 2 и к = 32, мы получим
6п(-2п2тг2 + 32) smrtTTt = — > .
п нечетное п нечетное
Мы приравниваем коэффициенты при подобных членах и в результате
получаем, что
20
Ьп
П7ГA6 — П27Г2)
Следовательно,
xsP(t) = — Y1
для нечетных п.
sin nnt
(8)
ПA6 — П27Г2)*
п нечетное v 7
Поскольку каждый член в уравнении (8) является симметричным
относительно t = |, то xsp(£) максимально, когда t = |, как и показано на
графике, приведенном нарис. 9.4.3. Принимая это, мы находим амплитуду
устойчивого периодического движения
20
х«р B) - 2^
1 . П7Г
7Г *—' пA6 — П27Г2) 2
п нечетное v 7
Первые 10 членов приводят к приближенному равенству х (|) «1,063 м.
1
1
1
1
-1
1
1
1
10
F@
1
- 1
1
1
1
_ 1
1
1
Г"
' 1
1
1
1
2
1
1
1
~1
1
1
1
1
3
1
1
1
I I
I I
1 1
i i
4 5
1 1
1 1
1 1
1
1
1
i
t(s)
1
1
1
Рис. 9.4.2. График
вынуждающей функции из примера 1
Рис. 9.4.3. Графикxsp(t)
824 Глава 9. Методы рядоз Фурье
Если в ряде Фурье функции F(t) есть отличный от нуля член Bn sin(iW£/£), для
которого Nn/L = ujo, то этот член вызывает чистый резонанс. Причина состоит в том, что
уравнение
тх" 4- кх = Bn sin u$t
имеет резонансное решение
x(t) = — 1 cosujot,
v 2muJo
если ljq = yjk/m. Решение, соответствующее уравнению D), в этом случае принимает вид
x® = -^7JCOSOJot + 2^ m(,,*-nwnn sin IT■ (9)
2mujQ *-i m((J£ — n27r2/Z/2) L
Пример 2
Предположим, что га = 2кги& = 32 Н/м, как в примере 1. Определим,
произойдет ли чистый резрнанс, если F(t) — нечетная периодическая
функция, определенная на одном периоде так:
(a) F{t) = /+10> °<*<"
w \-10, тг<г<2тг.
(b) F(t) = 10t, -тг < * < тг.
Решение (а) Собственная частота с^о = 4, а ряд Фурье функции F(t) имеет вид
F(t) = — (sin* + - sin3£ + - sin5t H ) .
7г \ 3 5 /
Поскольку этот ряд не содержит члена sin 4£, никакого резонанса не
произойдет.
(Ь) В этом случае ряд Фурье имеет вид
оо
~ (_1УИ-1
F(t) = 20 Y^ -—" sinn*.
71
n=l
Чистый резонанс происходит из-за присутствия члена, содержащего
множитель sin At. ■
Пример 3 иллюстрирует явления в окрестности резонанса, который может произойти,
когда один из членов в решении увеличивается, потому что его частота близка к собственной
частоте ujq.
Пример 3
Найдем устойчивое периодическое решение уравнения
х" + 10ж = F(t), A0)
где F(t)— функция с периодом 4, причем F(i) = 5£для— 2 < t < 2, и ряд
Фурье
7Г ^—' П I
9.4, Приложения рядов Фурье 825
Решение Подставив равенство A1) и
жвр(*) = У^ Ьп sin -T-
n=i z
в A0), получим
n=l ч 7 n=l
(-l)n+1 . П7Г*
-— sm—-.
n 2
Чтобы найти устойчивое периодическое решение, мы приравниваем
коэффициенты при подобных членах и затем решаем полученное уравнение
относительно Ьп. В результате получится устойчивое периодическое
решение
80 fy (-!)"+*
п=1 ч '
П7Г£
sm ■
71*£ 271*£ 37Г£
« @,8452) sin — - B4,4111) sin — - @,1738) sin —- + ••• .
Zt Zt Zt
Очень большая величина второго члена обязана тому, что cjo = \/Ш«7г =
= 27г/2. Таким образом, доминирующее движение пружины с
дифференциальным уравнением в A0) было бы колебанием с частотой 7г радиан
в секунду, периодом 2 с и амплитудой приблизительно равной 24, что
видно на графике xsp (t), приведенном на рис. 9.4.4. ■
Рис. 9.4.4. График функции xsp (t)
Затухающие вынужденные колебания
Теперь мы рассмотрим движение системы под влиянием периодической внешней силы F(i)
(рис. 9.4.5). Система в данном случае состоит из материальной точки заданной массы га,
прикрепленной к пружине с константой Гука & и к поршню с константой демпфирования с.
826 Глава 9. Методы рядов Фурье
Положение
равновесия
Рис. 9.4.5. Система, состоящая из
материальной точки заданной массы,
закрепленной на пружине, на
которую воздействует внешняя сила,
вызывающая затухающие колебания
Смещение х (t) материальной точки заданной массы от положения равновесия удовлетворяет
уравнению
тх" + сх' + кх = F(t). A2)
Мы вспоминаем задачу 25 из раздела 3.6 и находим, что установившееся периодическое
решение уравнения A2) для F(t) = Fq sin uot имеет вид
F0
x{t) = -====== sinM " a), A3)
y/(k — muj2J + (aoJ
где
cut _ ^ ^ .. .4
a = arctg ;r, 0 S a S 7Г. A4)
A; — той2
Пусть F(t) — нечетная функция с периодом 2L, ряд Фурье которой имеет вид
F(f) = f>nsin^. A5)
71=1
Тогда из предыдущей формулы по принципу суперпозиции следует, что установившееся
периодическое решение имеет вид
-(f) Г /-sin^-a") (i6)
где соп = шг/L и угол an определяется равенством A4) при данном значении ш.
Пример 4 иллюстрирует тот интересный факт, что преобладающая частота (частота колебаний
с наибольшей амплитудой) установившегося периодического решения может быть кратной
частоте силы F(t).
Пример 4
Предположим, что т = 3 кг, с = 0,02 Н/м/с, к = 27 Н/м и F(t) —
нечетная функция с периодом 2п9 причем F(t) = 7rt — t29 если 0 < t < я\
Найдем установившееся периодическое движение xsp (£).
9.4. Приложения рядов Фурье 827
Решение Мы находим, что ряд Фурье функции F(t) имеет вид
F(t) = - (sint+r3sin3^+-3sin5t-f--- J . A7)
Таким образом, Вп = О для п четных, Вп = 8/Gгп3) для нечетных п
иоип = п. Из равенства A6) получаем
#sp W
8
sin(nt — ап)
7Г
п нечетное
где
ап = arctg
nVB7 - 3n2J + @,02nJ'
@,02)n
г, 0 ^ an ^ 7Г.
A8)
A9)
' 27 - 3n2
С помощью программируемого калькулятора мы находим, что
xsp(t) и @,1061) sin(* - 0,0008) + A,5719) sin Ci - |тг) +
+ @,0004) sinE« - 3,1437) + @,0001) sinGi - 3,1428) + • • • .
B0)
Поскольку коэффициент, соответствующий п = 3, намного больше, чем
другие, ответ этой системы представляет собой приблизительно
синусоидальное движение с частотой в три раза большей, чем частота входной
силы. На рис. 9.4.6 показано xsp(t) по сравнению с вычисленной силой
10F(t)/k, для отображения которой выбрана подходящая единица
расстояния.
Рис. 9.4.6. Приложенная сила
и полученное установившееся
периодическое движение в
примере 4
Вот что происходит: материальная точка массой т = 3 на пружине
с к = 27 имеет (если мы игнорируем незначительное влияние поршня)
собственную частоту шо = у/к/т = 3 радиан в секунду. Приложенная
внешняя сила F(t) имеет [наименьший] период 2п секунд и,
следовательно, основную частоту (собственную частоту, частоту основной (первой)
828
Глава 9. Методы рядов Фурье
гармоники или наинизшую собственную частоту) 1 радиан в секунду.
Следовательно, член, соответствующий п = 3 в ряде Фурье функции
F(t) (в формуле A7)), имеет ту же самую частоту, что и собственная
частота системы. Таким образом, колебания происходят около резонанса,
причем, по сути, материальная точка заданной массы совершает три
колебания для каждого отдельного колебания внешней силы. Это и есть
физический эффект доминирующего (при п = 3) члена в правой части
равенства B0). Например, вы можете раскачать качели (т. е. заставить
их совершать колебания), притом они будут подниматься весьма высоко,
даже если будете подталкивать их (т. е. увеличивать размах (амплитуду)
колебаний) не каждый раз, а только при каждом третьем проходе (в
соответствующем направлении) качелей мимо вас. Это также объясняет,
почему некоторые трансформаторы "жужжат" на частоте намного более
высокой, чем 60 Гц.
Это явление встречается довольно часто и потому оно должно быть
принято во внимание при разработке механических систем. Чтобы
избежать возникновения чрезвычайно больших и потенциально
разрушительных колебаний вблизи резонанса, система должна быть разработана
так, чтобы она не подвергалась воздействию какой-либо внешней
периодической силы, основная частота (собственная частота, частота основной
(первой) гармоники или наинизшая собственная частота) которой близка
к собственной частоте вибрации или кратна ей. ■
9.4.Задачи
В задачах 1-6 найдите установившееся периодическое решение xsp(t) каждого из
дифференциальных уравнений. С помощью системы компьютерной алгебры начертите график суммы такого
числа членов ряда, чтобы "на глаз" был виден график xsp(t).
1. х" + Ъх = F(t), где F(t) — функция, период которой равен 27Г, притом такая, что F(t) = 3,
если 0 < t < 7г, F(t) = -3, если ж < t < 2-к.
2. х" + 10ж = F(t), где F(t) — четная функция, период которой равен 4, притом такая, что
F(t) = 3, если 0 < t < 1, F(t) = -3, если 1 < t < 2.
3. х" + Зх = F(t), где F(t) — нечетная функция, период*которой равен 2ж, притом такая, что
F(t) = 2t, если 0 < t < 7г.
4. х" + Ах = F(t), где F(t) — четная функция, период которой равен 4, притом такая, что
F(t) = 2t, если 0 < t < 2.
5. х" + 10х = F(t), где F(t) — нечетная функция, период которой равен 2, притом такая, что
F(t) = t-t2, если 0 < t < 1.
6. х" + 2х = F(t), где F(t) — четная функция, период которой равен 27г, притом такая, что
F(t) = sin t, если 0 < t < 7г.
В каждой из задач 7-12 заданы масса т и константа Гука к для системы, состоящей из
материальной точки заданной массы, закрепленной на пружине. Определите, действительно ли
произойдет чистый резонанс под влиянием данной внешней периодической силы F(t).
7. т — 1, к = 9; F(t) — нечетная функция, период которой равен 27Г, притом такая, что F(t) = 1
для 0 < t < -к.
9.5. Теплопроводность и разделение переменных 829
8. m = 2, к = 10; F(t) — нечетная функция, период которой равен 2, притом такая, что F(t) = 1
для 0 < t < 1.
9. т = 3, к = 12; F(£) — нечетная функция, период которой равен 27г, притом такая, что F(t) = 3
ДЛЯ 0 < £ < 7Г.
10. т= 1,к = 47г2; F(t) — нечетная функция, период которой равен 2, притом такая, что F(t) = 2£
для 0 < £ < 1.
11. т = 3, к = 48; F(£) — четная функция, период которой равен 27г, притом такая, что F(t) = t
ДЛЯ 0 < t < 7Г.
12. m = 2, fc = 50; F{t) — нечетная функция, период которой равен 27г, притом такая, что F(t) =
= 7Г£ — £2 ДЛЯ 0 < t < 7Г.
5 каждой из задач 13-16 заданы значения т, с и к для заглушённой системы, состоящей из
материальной точки заданной массы, закрепленной на пружине с демпфером. (Так что эта система
совершает затухающие колебания.) Найдите установившееся периодическое двиэюение (в форме
уравнения A6)) материальной точки заданной массы под влиянием данной внешней, силы F(t).
Вычислите коэффициенты и фазовые углы для первых трех отличных от нуля членов ряда для
13. т = 1, с = ОД, к — 4; F(t) — сила из задачи 1.
14. т = 2, с = ОД, к = 18; F(t) — сила из задачи 3.
15. т = 3, с = 1, к = 30; F(t) — сила из задачи 5.
16. т = 1, с = 0,01, к = 4; F(t) — сила из задачи 4.
17. Рассмотрим вынужденную заглушённую систему, состоящую из тела заданной массы,
закрепленного на пружине с демпфером. Пусть т = \ слага (единица массы в системе фунт-сила),
с = 0,6 фунтов на фут в секунду, к = 36 фунтов на фут. Сила F(t) представляет собой
функцию с периодом 2 (секунд), причем F(t) = 15, если 0 < t < 1, F(t) = —15, если 1 < t < 2.
(a) Найдите установившееся периодическое решение в форме
оо
x8p(t) — \\ Ьп sin(n7r£ — ап).
п=1
(b) Найдите с точностью до десятых дюйма положение материальной точки заданной массы
в момент времени t = 5 секунд.
18. Рассмотрим вынуждаемую заглушённую систему, состоящую из тела заданной массы,
закрепленного на пружине с демпфером, совершающую вынужденные затухающие колебания. Пусть
т = 1, с = 0,01 и к = 25. Сила F(t) представляет собой нечетную функцию, период которой
равен 27г, причем F(t) = t, если 0 < t < 7г/2, F(t) = -к — t, если ж/2 < t < 7Г. Найдите
установившееся периодическое движение; вычислите достаточно много членов ряда, чтобы
увидеть, что основная частота (собственная частота, частота основной (первой) гармоники или
наинизшая собственная частота) движения в пять раз больше, чем частота внешней силы.
9.5. Теплопроводность и разделение переменных
Самые важные приложения ряда Фурье относятся крешению дифференциальных уравнений
в частных производных методом разделения переменных, с которым мы познакомим вас
в этом разделе. Напомним, что дифференциальное уравнение в частных производных—это
уравнение, содержащее одну или несколько частных производных зависимой переменной,
830 Глава 9. Методы рядов Фурье
которая является функцией по крайней мере двух независимых переменных. Вот пример:
одномерное уравнение теплопроводности
в котором зависимая переменная и является неизвестной функцией х и t, а к — заданная
константа.
Нагретый стержень
Уравнение A) моделирует изменение температуры и в нагретом стержне, расположенном
вдоль оси х в зависимости от положения х и времени t. Мы предполагаем, что стержень имеет
постоянное поперечное сечение (площадь его равна А) перпендикулярное к оси, причем
стержень сделан из однородного материала. Мы предполагаем далее, что поперечное сечение
стержня настолько маленькое, что и является постоянной во всем поперечном сечении и что
боковая поверхность стержня изолирована так, что поток теплоты через нее отсутствует.
Тогда и действительно будет функцией х и t, причем теплота будет течь по стержню только
в направлении оси х. Вообще, мы предполагаем, что теплота может течь подобно жидкости
от более теплых частей тела к более холодным.
Поток теплоты ф(х, t) в стержне — это расход теплоты в момент времени t на единицу
площади поперечного сечения в точке х. Обычно единицами измерения для ф являются
калории в секунду на квадратный сантиметр. Вывод уравнения A) базируется на эмпирически
установленном законе, согласно которому
*—*£■ B)
где константу пропорциональности К называют коэффициентом теплопроводности
материала стержня. Знак "минус" в уравнении B) соответствует тому, что тепло
распространяется в отрицательном направлении оси х, когда их > 0. Ну и, конечно же, ф является
положительным, если тепло распространяется в положительном направлении оси х\ короче
говоря, тепло распространяется от горячего места к холодному месту, а не наоборот. /
Аф(х, t) ГГ "~ ~~~Ш Аф(х + Ах, t)
' ' '■* -►
х + Ах
Рис. 9.5.1. Чистый приток
теплоты в короткий отрезок стержня
Теперь рассмотрим маленький отрезок стержня, соответствующий интервалу [х, х +
4- Ах], как показано на рис. 9.5.1. Скорость притока R (в калориях в секунду) теплоты в этот
отрезок через его два конца равна
R = Аф(х, t) - Аф(х + Дж, *) = КА[их(х + Ах, t) - их(х, £)]. C)
Полученная скорость изменения температуры щ в единицу времени на отрезке зависит от
его плотности 6 (грамм в кубическом сантиметре) и удельной теплоемкости с (обе величины
считаются константами). Удельная теплоемкость с—это количество теплоты (в калориях)
9.5. Теплопроводность и разделение переменных 831
требуемое для того, чтобы повысить на 1° температуру 1 г материала. Следовательно, с5и
калорий теплоты нужно сообщить 1 см3 материала стержня, чтобы повысить его
температуру от нуля до температуры и. Короткая (тонкая) пластина стержня толщиной dx имеет
объем A dx, так что требуется cSuA dx калорий теплоты, чтобы повысить температуру этой
пластины от 0 до и. Теплосодержание (энтальпия, или содержание теплоты)
Q{t) = [
ж+Аа?
c5Au(x, t) dx D)
пластинки [ж, х + Ах] стержня — это количество теплоты, необходимое для того, чтобы
повысить температуру пластинки от нуля до данной температуры u(x,t). Поскольку теплота
вводится в пластинку и выводится из пластинки только через ее концы, из равенства C) мы
видим, что
Q\t) = КА[их{х + Ах, t) - ux(x, *)], E)
потому что R = dQ/dt. Таким образом, дифференцируя подынтегральное выражение в
равенстве D) и применяя теорему о среднем (формулу Лагранжа) для интегралов, мы видим,
что
рж+Аж
Qf(t) = с6Ащ(х, t) dx — с5Ащ(х, t) Ax F)
JX
для некоторого х из (ж, х + Ах). Приравнивая значения в равенствах E) и F), мы получаем
с5Ащ(х, t) Ах = КА[их(х + Ах, t) — ux(x, £)], G)
так что
где
щ{_ f) = kux(x + Ax£-ux(x,t)^ (g)
fc=l (9)
— способность материала к тепловой (термической) диффузии, или термодиффузии.
Наконец, переходя к пределу в равенстве (8) при Ах —► 0 и х —» х, мы получим одномерное
уравнение теплопроводности
Таким образом, температура и(х, t) в тонком стержне с изолированной боковой
поверхностью должна удовлетворять этому дифференциальному уравнению в частных производных.
Граничные (краевые) условия
Теперь предположим, что стержень имеет конечную длину L, простираясь от х = 0 до
х = L. Функция и(х, t), задающая распределение температур в нем, будет найдена среди
всех возможных решений уравнения A) из вспомогательных условий. Мы уже знаем, что
832 Глава 9. Методы рядов Фурье
решение обыкновенного дифференциального уравнения содержит произвольные
постоянные, но в отличие от этого решение дифференциального уравнения в частных производных
обычно содержит произвольные функции. В случае нагретого стержня мы можем задать
функцию f(x), задающую распределение температур в нем в момент времени t = 0. Это
дает начальное условие
u(x,0) = f(x).
A0)
Мы можем также задать температуру на обоих концах стержня. Например, если бы каждый
конец был зажат в большом куске льда, температура которого равна нулю, мы имели бы
следующие условия в конечных точках:
и@, t) = u(L, t) = 0 (для всех t).
(и)
Объединяя все это, мы получаем граничную (краевую) задачу (задачу, в которой заданы
граничные (предельные, или краевые) значения):
у
ди
к
д\
at ' дх2
u@,t) = u(L,t) = 0,
u(x,0) = f(x).
@<x<L, t>0);
A2a)
A2b)
A2c)
Рис. 9.5.2 дает геометрическую интерпретацию граничной (краевой) задачи (задачи,
в которой заданы граничные (предельные, или краевые) значения) A2): мы должны
найти функцию u(x,t), которая непрерывна на неограниченной ленте (включая ее границу),
заштрихованной в плоскости xt. Эта функция должна удовлетворять дифференциальному
уравнению A2а) в каждой внутренней точке ленты, а на границе (на краях) ленты должна
принимать значения, заданные граничными условиями в равенствах A2Ь) и A2с). Физическая
интуиция подсказывает, что если функция f(x) достаточно хорошая, то может существовать
одна и только одна функция и(х, t), являющаяся решением данной задачи.
Вместо того чтобы установить фиксированную температуру, можно изолировать оба
конца стержня. В этом случае теплота не сможет протекать через какой-либо конец, так что
и = 0
\й = 0
и =f(x) L
Рис. 9.5.2. Геометрическая
интерпретация граничной (краевой)
задачи (задачи, в которой заданы
граничные (предельные, или краевые)
значения) в уравнениях A2а)-A2с)
9.5. Теплопроводность и разделение переменных 833
в этом случае из равенства B) мы видим, что условия в A2Ь) нужно заменить в граничной
задаче условиями в конечных точках
ux@,t) = ux(L,t) = 0
A3)
(для всех t). Можно задать и другие условия: можно изолировать один конец стержня и задать
фиксированную температуру на другом. Эти и другие возможные условия в конечных точках
обсуждаются в задачах.
Наложение, или суперпозиция решений
Обратите внимание, что уравнение теплопроводности A2а)линейно. Иными словами, любая
линейная комбинация и = c\U\+ C2U2 двух решений уравнения A2а) также является
решением уравнения A2а); это немедленно следует из линейности операции дифференцирования
(взятия частной производной). Кроме того, если каждая из функций и\ и U2 удовлетворяет
условиям A2Ь), то и любая линейная комбинация и — c\U\ -f C2U2 также удовлетворяет
этим условиям. Условия A2Ь) поэтому называют однородными краевыми (граничными)
условиями (хотя более описательно было бы назвать их линейными граничными условиями,
поскольку именно такое название лучше выражало бы их сущность). Ну а если граничное
(краевое, предельное) условие A2с) не является однородным,'Ъц<^<$но называется
неоднородным краевым (граничным) условием.
Наша глобальная стратегия решения граничной (краевой) задачи (задачи, в которой
заданы граничные (предельные, или краевые) значения) A2) будет состоять в том, чтобы
найти функции и\, 1x2, us,..., удовлетворяющие дифференциальному уравнению в частных
производных A2а) и однородным граничным условиям A2Ь), а затем попытаться
скомбинировать эти функции с помощью принципа наложения (суперпозиции) так, как будто бы они
являются стандартными блоками. Именно на такой способ мы возлагаем надежду получить
решением = с\и\+С2и2Л , которое удовлетворяет также неоднородному условию A2с).
Пример 1 иллюстрирует этот подход.
Пример 1
Прямой подстановкой просто проверить, что каждая из функций
ui(x,t) = e-tsinx, U2(x,t) = e~4tsin2# и Uz(x,t) = e_9tsin3x
удовлетворяет уравнению щ = ихх. Используем эти функции, чтобы
найти (сконструировать) решение граничной (краевой) задачи (задачи,
в которой заданы граничные (предельные, или краевые) значения)
@ < х < 7г, t>0);
ди _ д2и
~di~"dx^
и(х, 0) = 80 sin3 x = 60 sin x — 20 sin Sx.
Решение Любая линейная комбинация вида
u{x,t) = CiUi(x,t) +C2U2(x,t) + CsUs(x,t) =
= с\е~г sin ж + сге~4* sin 2x -f с%е~т sin Sx
A4a)
A4b)
A4e)
834 Глава 9. Методы рядов Фурье
удовлетворяет и дифференциальному уравнению A4а), и однородным
условиям A4Ь). Поскольку
гх(х, 0) = Ci sin х -h С2 sin 2х + сз sin Зх,
мы видим, что мы можем просто удовлетворить также и неоднородным
условиям A4с), полагая с\ = 60, С2 = 0 и сз = —20. Таким образом,
решение данной граничной (краевой) задачи (задачи, в которой заданы
граничные (предельные, или краевые) значения) имеет вид
и(х, t) = 60e_t sin x - 20e"9t sin 3x. ■
Граничная (краевая) задача (задача, в которой заданы граничные (предельные, или
краевые) значения) в примере 1 исключительно проста, поскольку необходимо только конечное
число однородных решений, чтобы с помощью их линейной комбинации удовлетворить
неоднородное граничное (краевое, предельное) условие. Гораздо чаще для того* чтобы
удовлетворить условиям A2а) и A2Ь), требуется бесконечная последовательность ^1,^2,^3,-..
функций. В этом случае мы записываем бесконечный ряд
оо
> u(x,t) = y£2,cnun(x,t) A5)
71=1
и затем пытаемся определить коэффициенты ci, C2, сз,... так, чтобы удовлетворить также
условию A2с). Следующий принцип суммирует свойства этого бесконечного ряда, который
подлежит проверке на предмет того, что он представляет собой решение граничной (краевой)
задачи (задачи, в которой заданы граничные (предельные, или краевые) значения) A2).
миашдшшм Наложение, или суперпозиция решений
Предположим, что каждая из функций ui,U29v>3,--- удовлетворяет и дифференциальному
уравнению A2а) (для 0 < а; < L и t > 0), и однородным условиям A2Ь). Предположим
также, что коэффициенты в уравнении A5) выбраны так, что выполняются следующие три
условия.
1. Для 0<x<Lnt>0 функция, определенная рядом A5), непрерывна, причем
определяющий ее ряд можно почленно дифференцировать (однажды по t и дважды
по ж).
оо
, 2. ]Гспгхп(я,0) = /(ж).
п=1
3. Функция и(х, t), определенная равенством A5) внутри полосы O^x^Lnt^O,
а также граничными условиями A2Ь) и A2с) на ее границе, является непрерывной.
Тогда и{х, i) — решение граничной (краевой) задачи (задачи, в которой заданы граничные
(предельные, или краевые) значения) A2). А
В методе разделения переменных, описанном далее, мы концентрируем внимание на
обнаружении решений щ9 Щ, Щ, • • •, удовлетворяющих однородным условиям и на
определении коэффициентов ряда, таких что ряд в равенстве A5) удовлетворяет неоднородным
9.5. Теплопроводность и разделение переменных 835
условиям после подстановки t = 0. В этой точке мы имеем только формальное решение в
виде ряда — ряда, который только формально можно считать решением граничной (краевой)
задачи (задачи, в которой заданы граничные (предельные, или краевые) значения). Этот ряд
необходимо подвергнуть проверке на непрерывность и, кроме того, необходимо проверить
условия дифференцируемости, выдвинутые в части A) только что сформулированного здесь
принципа суперпозиции. Если функция f(x) в A2с) кусочно гладкая, то может быть
доказано, что формальное решение в виде ряда всегда удовлетворяет данным здесь ограничениям
и, кроме того, представляет собой единственное решение граничной (краевой) задачи
(задачи, в которой заданы граничные (предельные, или краевые) значения). Доказательство
можно найти в главе 6 книги Р. Черчилля (R. V. Churchill) и Дж. Брауна (J. W. Brown),
посвященной рядам Фурье и краевым (граничным) задачам. Ее 3-е издание вышло в Нью-Йорке
в 1978 году. Вот полные выгодные данные этого издания: R. V. Churchill and J. W. Brown,
Fourier Series and Boundary Value Problems, 3rd ed. (New York: McGraw-Hill, 1978).
Разделение переменных
Этот метод решения граничной (краевой) задачи (задачи, в которой заданы граничные
(предельные, или краевые) значения) A2) для нагретого стержня был введен Фурье в его работе
по изучению теплоты, процитированной в разделе 9.1. Мы сначала ищем функции (в
дальнейшем они сыграют роль кирпичиков) и\, U2, Щ9 ..., которые удовлетворяют
дифференциальному уравнению щ = кихх и однородным условиям tx@, t) — u(L,t) = 0, причем
каждая из этих функций должна иметь специальный вид:
> u(x,t) = X(x)T(t), A6)
в котором "отделены" переменные х и t. Подстановка равенства A6) в щ = кихх приводит
к уравнению XT' = кХ"Т, где для краткости мы пишем Т' вместо T'{t) и X" вместо Х"(х).
Деление обеих частей на кХТ тогда дает
V* Ф1
Левая часть уравнения A7) представляет собой функцию только переменной х, а правая
часть — функцию только переменной t. Если t сохраняет постоянное значение в правой
части, то левая часть Хп/X тоже должна оставаться постоянной, даже если х изменяется.
Точно так же, если х сохраняет постоянное значение в левой части, то правая часть Т' /кТ
тоже должна оставаться постоянной, даже если t изменяется. Следовательно, равенство
может выполняться, только если каждое из этих двух выражений является постоянным,
причем равным одной и той же самой константе, которую для удобства мы обозначаем
через —А. Таким образом, уравнение A7) принимает вид
Хп Т'
-х = Щ ~ "А- <18>
которому равносильна система из следующих двух уравнений:
Х"{х) + ХХ{х) = 0, A9)
T'(t) + XkT{t) = 0. B0)
836 Глава 9. Методы рядов Фурье
Из этого следует, что функция-произведение и(х, t) = X(x)T(t) удовлетворяет
дифференциальному уравнению в частных производных щ = киХХ9 если Х(х) и T(t) (каждая по
отдельности) удовлетворяют обыкновенным дифференциальным уравнениям A9) и B0)
для некоторого значения коцстанты Л.
Мы сосредоточимся сначала на Х(х). Однородные условия в конечных точках имеют
вид
и(х, 0) = X@)T(t) =.0, • u(L, t) = X(L)T(t) = 0. B1)
Если T(t) является нетривиальной функцией от £, то B1) может выполняться, только если
Х@) = X(L) = 0. Таким образом, Х{х) должна быть решением граничной (краевой)
задачи (задачи, в которой заданы граничные (предельные, или краевые) значения)
х» + хх = о,
Х@) = 0, X{L) = 0. V '
Фактически это задача на собственные значения того типа, который мы обсуждали в
разделе 3.8. Действительно, в примере 3 того раздела мы видели, что задача B2) имеет
нетривиальное решение тогда и только тогда, когда Л равно одному из собственных значений
П27Г2
An = -JJ-i п = 1,2,3,..., B3)
и собственная функция, соответствующая Лп, есть
Хп(х) =sin^, n = 1,2,3,.... B4)
Li
Вспомним теперь рассуждение, которое привело нас к равенствам B3) и B4). Если Л = 0,
то из B2) очевидным образом следует, что Х(х) = 0. Если Л = —а2 < 0, то
Х{х) = A cosh ax + JBsinhax,
и затем из условий Х@) = 0 = X(L) следует, что А = В = 0. Следовательно, единственная
возможность для нетривиальной собственной функции — это когда Л = а2 > 0. Тогда
Х(х) = A cos ax + В sin ax,
и из условий Х@) — 0 = X(L) тогда следует, что А = 0 и что а = nn/L для некоторого
положительного целого числа п. Всякий раз, когда разделение переменных приводит к
незнакомой задаче на собственные значения, мы, вообще говоря, долины отдельно рассматривать
случаи Л = 0, Л = -а2 < 0 и Л = а2 > 0.
Теперь мы обращаем наше внимание на уравнение B0), зная, что константа Л должна
быть равна одному из собственных значений, указанных в B3). Для n-й из этих возможностей
мы пишем уравнение B0) в виде
Т'п + —у~Тп = 0, B5)
причем ожидаем получить различные решения Tn(i) для каждого положительного целого
числа п. Нетривиальное решение этого уравнения имеет вид
Tn(t) = exp (-n27r2kt/L2). B6)
9.5. Теплопроводность и разделение переменных 837
Мы опускаем произвольную постоянную интегрирования, потому что она (на самом деле)
будет вставлена позже.
Теперь давайте подытожим наше продвижение в решении поставленной задачи. Мы
обнаружили две соответствующие последовательности {Хп}^ и {Тп}^ функций, заданных
равенствами B4) и B6). Вместе эти последовальности позволяют образовать
последовательность функций-произведений
ип(х, t) = Xn{x)Tn{t) = exp (-n27r2kt/L2) sin ^^, B7)
n == 1, 2, 3, .... Каждая из этих функций удовлетворяет и уравнению теплопроводности
Щ = киХХ9 и однородным условиям w(Q, t) = u(L, t) = 0. Теперь мы объединяем (строим
линейную комбинацию) эти функции (т. е. применяем принцип наложения, или
суперпозиции), чтобы попытаться удовлетворить также и неоднородное условие и(х, 0) = f(x). Для
этого мы формируем бесконечный ряд
и(х, t) = Y/ cnun(x, t) ^=У^ Сп exp (—n27r2kt/L2) sin ——. B8)
тътгх
сп exp {—n"'K"kt/Ll") sm
n=l n=l ~
Остается только определить постоянные коэффициенты {сп}Т так» чтобы
(*, 0) = ]Г с sin 2H =/(*). B9)
Но это будет расположенный по синусам ряд Фурье функции f(x) на интервале [0, L] при
условии, что мы выберем
(•
> сп = Ьп = — \ f(x) sm —— cte C0)
для каждого п = 1,2,3, Таким образом, мы получили следующий результат.
Теорема 1
Нагретый стержень с нулевыми температурами
в конечных точках
Граничная (краевая) задача (задача, в которой заданы граничные (предельные, или краевые)
значения) A2) для нагретого стержня с нулевыми температурами в конечных точках имеет
формальное решение в виде ряда
оо
> и(х, t) = У2Ьп exp (-n27r2kt/L2) sin ——, C1)
где {bn} — коэффициенты расположенного по синусам ряда Фурье функции f(x) = u(x, 0),
задающей начальное распределение температур в стержне. Значения этих коэффициентов
даются равенством C0). А
Замечание. Переходя к пределу (почленно) в C1) при £—> оо, мы получаемая, оо) = 0,
потому что на обоих концах стержня поддерживается нулевая температура. ■
838 Глава 9. Методы рядов Фурье
Мжгщмт- ''':'"':;>
Серебро
Медь
Алюминий
Железо
Бетон
1 v- к(тш/й)
1,70
1,15
0,85
0,15
0,005
Рис. 9.5.3. Некоторые значения
(константы) коэффициента
температуропроводности
Решение в виде ряда, приведенного в равенстве C1), обычно сходится весьма быстро,
если t не является слишком маленьким, поскольку в членах ряда присутствуют отрицательные
множители в показателях степени. Поэтому этот ряд вполне пригоден на практике для
числовых вычислений. В задачах и примерах используются значения (константы) коэффициента
температуропроводности к для некоторых часто применяемых материалов, перечисленные
в таблице на рис. 9.5.3.
Пример 2
Предположим, что стержень длиной L = 50 см погружают в пар до тех
пор, пока температура во всех его точках не достигнет щ = 100° С.
В момент времени t = 0 его боковую поверхность теплоизолируют, а его
оба конца вставляют в лед при 0°С. Вычислите температуру в середине
стержня через полчаса, если стержень сделан из (а) железа; (Ь) бетона.
Решение Граничная (краевая) задача (задача, в которой заданы граничные
(предельные, или краевые) значения) для функции u(x,t)9 задающей
распределение температур этого стержня, имеет вид
u(Q,t) = u(L,t) = 0;
и(х,0) = щ.
Вспомните ряд для прямоугольного импульса
/(*) = ! J2 -*
7Г *—' г>.
п нечетное
rnrt
sin-p
п L
+1, если 0 < t < L,
—1, если — L < t < 0,
который мы получили в примере 1 из раздела 9.2. Следовательно,
расположенный по синусам ряд Фурье функции f(x) = щ имеет вид
£( 4г*0 v^ 1 • П7ГХ
Я*) = — Zw ГГ 8т ~Т~
7Г *—' П Ь
п нечетное
9.5. Теплопроводность и разделение переменных 839
для 0 < х < L. Следовательно, коэффициенты Фурье в уравнении C1)
определяются по формуле
= <
( 4и0
— для п нечетных,
П7Г
О для п четных,
и поэтому функция, задающая распределение температур стержня,
задается формулой
п. нечетнпе ^ '
2^-2^ ч П7ГХ
Нарис. 9.5.4 показан графику = u(x,t)npjiuo — 100и1/ = бО.Мывидим,
что при увеличении t максимальная температура стержня (очевидно, в его
середине) монотонно убывает. Температура в середине х = 25 через
t = 1800 секунд равна указанным ниже значениям;
(ок lanm 40° V^ (~1)n+1 ( 1*пЧ2к\
„B5,1800) = — Y, —^-™V{ 25~ J'
n нечетное х /
п нечетное
(a) При к = 0,15 для железа этот ряд дает
иB5,1800) « 43,8519 - 0,0029 + 0,0000 » 43,85°С.
(b) При к = 0,005 для бетона этот ряд дает
мB5,1800) » 122,8795 - 30,8257 + 10,4754 - 3,1894 +
+ 0,7958 - 0,1572 + 0,0242 - 0,0029 4-
+ 0,0003 - 0,0000 + • • • » 100,00°С.
Таким образом, бетон — очень эффективный (тепло)изолятор. ■
Условия изоляции в конечных точках
Мы теперь рассматриваем граничную (краевую) задачу (задачу, в которой заданы граничные
(предельные, или краевые) значения)
ди д и
~dt = kdrf @<x<L, t>0); C2a)
ux@,t) = ux(L,t) = 0, C2b)
u(x,0) = f(x), C2c)
которая соответствует стержню длины L с начальной температурой / (х), оба конца которого
изолированы. Разделяя переменные, полагаема (ж, t) — X(x)T(t) и продолжаем решать, как
и в предыдущем случае. Так мы получим уравнения A6)-B0) без каких-либо изменений.
Но из однородных условий C2Ь) в конечных точках следует, что Х'@) = X'(L) = 0.
840 Глава 9. Методы рядов Фурье
Таким образом, функция Х(х) должна быть решением граничной (краевой) задачи (задачи,
в которой заданы граничные (предельные, или краевые) значения)
X" + ХХ = 0;
Х'@) = 0, X'(L) = 0.
C3)
Что касается собственных значений, то мы должны отдельно рассмотреть возможности
Л = 0, А = -а2 < ОиЛ = а2 > 0.
"При Л = 0 общее решение уравнения X" = 0 имеет вид Х(х) = Ах + В, так что
Х'{х) = А. Следовательно, из условий в конечных точках C3) следует, что А = 0, но В
может быть отличным от нуля. Поскольку функция, равная постоянной, умноженной на
собственную функцию, сама является собственной функцией, для В мы можем выбрать
любое удобное нам постоянное значение. Таким образом, при 2? = 1, мы имеем нулевое
собственное значение и соответствующую собственную функцию
Ао = 0, Х0(х) = 1.
C4)
Полагая А = 0 в уравнении B0), мы получаем Tf(t) = 0, так что мы также можем положить
T0(t) = 1.
При А = —а2 < 0 общее решение уравнения X" — а2Х = 0 имеет вид
Х(х) = A cosh ax + В sinh ax,
и мы легко проверяем, что Х'@) = X'(L) = 0, только если А = В = 0. Таким образом,
никаких отрицательных собственных значений нет.
При А = а2 > 0 общее решение уравнения X" Л- а2Х = 0 имеет вид
Х(х) —A cos ax + В sin ax,
Х'(х) = — Aasmax + Ba cos ax.
100
зо
лс(см)
Рис. 9.5.4. График функции, задающей распределение температур и(х, t)
в примере 2
9,5. Теплопроводность и разделение переменных 841
Следовательно, из Х'@) = 0 следует, что В = 0, а затем из равенств
X'(L) = -AasmaL = 0
следует, что olL должно быть (целым) кратным 7г, потому что а Ф 0 и А ф О, если мы хотим
иметь нетривиальное решение. Таким образом, мы имеем бесконечную последовательность
собственных значений и соответствующих собственных функций
2 2
Ап = < = -Тг"» ^(ж) = cos -J- C5)
для п = 1,2, 3, Так же как и прежде, решение уравнения B0) при А = п2тг2/Ь2 имеет
вид Tn{t) = exp (-n2ir2kt/L2).
Поэтому функции-произведения, удовлетворяющие однородным условиям, имеют вид
uq(х, i) = 1; ип(х, i) — exp (n2ir2kt/L2) cos —— C6)
L/
для п = 1,2,3, — Следовательно, пробное решение имеет вид
i(x, t) = со 4- V"" cn exp (—n27r2kt/L2) cos ——. C7)
Чтобы удовлетворить неоднородному условию и(х, 0) = /(ж), мы можем рассматривать
равенство C7) при t — 0 как расположенный по косинусам ряд Фурье
оо
f\x) = у + 2^ flri COS -у-, C8)
где
w 2 fL _, ч П7ГЖ , ,__ч
> ап = у /(#) cos —— cte C9)
для п = 0,1,2, Таким образом, мы установили следующий результат.
Теорема 2
Нагретый стержень с изолированными концами
Граничная (краевая) задача (задача, в которой заданы граничные (предельные, или
краевые) значения) C2) для нагретого стержня с изолированными концами имеет формальное
решение в виде ряда
оо
> и(х, t) = — + 2Z ап exp (—n2/K2kt/L2) cos ——, D0)
n=l
где {ап} — коэффициенты расположенного по косинусам ряда Фурье функции, задающей
начальное распределение температур стержня f(x) = и(х, 0), причем их значения
определяются по формуле C9). А
842 Глава 9. Методы рядов Фурье
Замечание. Обратите внимание, что
п 1 f"k
lim и(х, t) = -~ = т\ f(x) dx,
t-+oo I L Jo
D1)
— среднее начальной температуры. Значит, если боковая поверхность и концы стержня
изолированы, теплота, первоначально содержащаяся в стержне, в конечном счете распределится
равномерно по всему стержню. ■
Пример 3
Мы рассматриваем тот же самый стержень длиной 50 см, что и в
примере 2, но теперь предполагаем, что его начальная температура задается
"треугольной функцией", график которой приведен на рис. 9.5.5. В
момент времени t = 0 боковая поверхность стержня и оба его конца
изолированы. Тогда функция, задающая распределение температур и(х, i)
в нем, является решением граничной (краевой) задачи (задачи, в которой
заданы граничные (предельные, или краевые) значения)
lit == fcV'xxi
u(x,0) = f(x).
Теперь, подставляя L = 25 в ряд четного продолжения треугольной
волны, заданной уравнением A5) из раздела 9.3 (где длина интервала
обозначена через 2L), а затем умножая полученный результат на 4, приходим
к расположенному по косинусам ряду Фурье
/(х) = 5(Ь
400 у^ 1
тг2 ^ п2
cos
п нечетное
WKX
(для 0 < х < 50) нашей функции, задающей начальное распределение
температур. Но чтобы члены этого ряда соответствовали членам ряда D0)
/B5) =100
Рис. 9.5.5. График функции,
задающей начальное распределение
температур и(х, 0) = f(x) в
примере 3
9.5. Теплопроводность и разделение переменных 843
100 N
при L = 50, мы должны получить члены вида cos(n7nc/50), а не члены
вида cos(n7nr/25). Следовательно, мы повсюду заменяем п на п/2 и таким
образом переписываем ряд в форме
/(я) = 50 -
1600
7Г*
п=2,6,10,.
COS
п*
птгх
0"''
обратите внимание, что индекс суммирования пробегает все
положительные целые числа вида 4га — 2. Тогда из теоремы 2 следует, что функция,
задающая распределение температур в стержне, выражается формулой
и(х, t) = 50 —
1600
п2
v^ 1 / П27Г2Ы\
=2,6,10,... ч у
COS-
П7ГХ
15""
На рис. 9.5.6 показан график и = и(х, i) для первых 1200 секунд, и мы
видим, что распределение температур в стержне, начинаясь с крутого
максимума в середине х = 25, быстро усредняется, поскольку теплота
в стержне перераспределяется с увеличением t.
t(c) 800
1200 50
Рис. 9.5.6. График функции, задающей распределение температур и(х, t)
в примере 3
Наконец, мы отметим, что, хотя мы поставили граничные (краевые) задачи (задачи,
в которых заданы граничные (предельные, или краевые) значения) A2) и C2) для стержня
длиной L, они также моделируют температуру u(x,t) в бесконечной плите 0 ^ х ^ L
в трехмерном пространстве, если начальная температура f(x) плиты зависит только от х,
а ее две грани х = 0 и х = L или обе изолированы, или на обеих поддерживается нулевая
температура. '
844 Глава 9. Методы рядов Фурье
В задачах 1-12 найдите решения граничных (краевых) задач (задач, в которых заданы граничные
(предельные, или краевые) значения).
1. щ — Зихх, 0 < х < 7Г, t > 0; u(Q, i) = -цGг, t) = 0, и(х, 0) = 4 sin 2x
2. щ = Юихх, 0 < х < 5, t > 0; их@у t) = uxE, t) = 0, и(х, 0) = 7
3. щ = 2ихх, 0 < х < 1, £ > 0; 1/@, £) = г/A, t) = 0, г^(х, 0) = 5 sinъх — \ sin 37гж
4. ut = ихх, 0 < х < 7Г, £ > 0; г*@, £) = г^GГ, t) = 0, w(a^O) =а 4sm4x cos 2ж
5. i/t = 2ихх, 0 < ж < 3, t > 0; ux(Q,t) = 1^C, £) = 0, w(x,0) == 4cos §7гж — 2 cos |7гж
6. 2i^t = глЖж, 0 < х < 1, t > 0; г*@, £) = w(l,t) = 0, г^(ж,0) = 4sin7гж cos3 7гж
7. 3ut = ихх, 0 < х < 2, t > 0; ux(Q,t) = uxB,t) = 0, и{х, 0) = cos2 2тгж
8. i/t = ^хх, 0 < х < 2, t > 0; ?/ж @, t) = их B, £) = 0, и(х, 0) = 10 cos 7гж cos 37гж
9. 10ut = глжж, 0 < х < 5, * > 0; u@, £) = wE, t) = 0, и(ж, 0) = 25
10. 5wt = ихх, 0 < ж < 10, t > 0; u@, £) = мA0, t) = 0, и(х, 0) = 4ж
11. 5ut = Wxx, 0 < х < 10, t > 0; глж@, t) = u*A0, *)■■?= О, та(ж,0) = 4х
12. гл4 = глЖх, 0 < х < 100, £ > 0; u(Q, t) = uA00, t) = 0, w(x, 0) = жA00 - х)
13. Предположим, что стержень длиной 40 см с изолированной боковой поверхностью однородно
нагрет до температуры 100° С, причем в момент времени t = 0 оба его конца вставлены в лед
при 0°С. (а) Найдите формальное решение в виде ряда для температуры u(x,t) стержня.
(Ь) В случае, когда стержень сделан из меди, покажите что через 5 минут температура в его
середине будет приблизительно равна 15° С. (с) В случае, когда стержень сделан из бетона,
используйте первый член ряда, чтобы найти время, требуемое для того, чтобы температура его
середины упала до 15° С.
14. Медный стержень длиной 50 см с изолированной боковой поверхностью имеет начальную
температуру и(х, 0) = 2х, а в момент времени t = 0 оба его конца изолируются, (а) Найдите
u(x,t). (b) Какой будет температура стержня в точке х = 10 через 1 минуту? (с)
Приблизительно сколько потребуется времени, чтобы его температура в точке х = 10 стала равной
45° С?
15. На двух гранях плиты 0 ^ х ^ L поддерживается нулевая температура, причем начальная
температура плиты дается формулой и(х, 0) = А (константа) для 0 < х < L/2, и(х,0) = 0
для L/2 < х < L. Получите формальное решение в виде ряда
' 4А ^ sin2(ri7r/4) ( 2 2,./г2\ . П7ГХ
u(x,t) = — 2_^ — ехР \п п kt/L ) sin ——.
n=l
16. Имеется две железные плиты каждая толщиной 25 см. Первоначально температура одной из
них равна 100°С (по всей плите), а температура другой — 0°С. В момент времени t — 0 они
прикладываются грань к грани, а на их внешних гранях поддерживается температура 0°С.
(а) Используя результат задачи 15, проверьте, что через полчаса температура их общей грани
будет приблизительно равна 22° С. (Ь) Предположим теперь, что эти две плиты сделаны из
бетона, а не из железа. Сколько потребуется времени, чтобы температура их общей грани
достигла 22° С?
17. (Установившееся и переходное распределение температур) Пусть в конечных точках
изолированного с боковых сторон стержня с начальной температурой u(x,Q) = f(x) поддерживается
температура и@, t) = А и u(L, t) = В. (а) Опытным путем удалось установить, что при
t —► +оо и(х, t) приближается к установившейся температуре uss(x), которая получается как
решение граничной (краевой) задачи (задачи, в которой заданы граничные (предельные, или
9.5. Теплопроводность и разделение переменных 845
краевые) значения) при ut = 0. Таким образом, uss(x) представляет собой решение граничной
(краевой) задачи (задачи, в которой заданы граничные (предельные, или краевые) значения)
^~Г = 0; uss@) = A, uss(L) = B.
Найдите uss(x). (b) Пусть теперь температура в переходном процессе utv{x,t) задана
формулой
utT(x,t) = u{x,t) — uss(x).
Покажите, что utT является решением граничной (краевой) задачи (задачи, в которой заданы
граничные (предельные, или краевые) значения)
дщт _ , d2utr
dt ~&^~;
utr@,£) = utr(L,t) = 0,
utr(x,0) = g(x) = f(x) - uaa(x).
(с) Из формул C0) и C1) выведите, что
u(x,t) = uas(x) + wtr(a;,t) =
oo
WKX
= uss(x) + ^ cn exp (—n27r2kt/L2) sin ——,
где
On
т lf(x) ~ u**(x)]sin ~t~ dx-
L< Jo v L
18. Предположим, что изолированный с боковых сторон стержень длиной L = 50 и с
коэффициентом температуропроводности к = 1 имеет начальную температуру п(ж,0) = 0и температуры
в конечных точках и@, t) = 0, uE0, t) = 100. Примените результат задачи 17, чтобы показать,
что
и(х, t)=2x-™JT (~^"+1 exp (-nVfc*/2500) sin ^.
n=l
19. Предположим, что теплота вводится в изолированный с боковых сторон стержень со скоростью
q(x,t) калорий в секунду на кубический сантиметр. Продолжите вывод уравнения
теплопроводности, имеющийся в этом разделе, и получите уравнение
ди __ д2и q(x,t)
dt дх2 сб
20. Предположим, что ток, текущий через изолированный с боковых сторон стержень, генерирует
теплоту с постоянной скоростью; в этих предположениях с помощью результата задачи 19
можно вывести уравнение
В качестве граничных условий возьмем u@,t) = u(L,t) = 0 и и(х,0) = f(x)j (а) Найдите
установившуюся температуру (температуру в установившемся режиме) uss(x)9 определенную
равенством
0 = fc^+C, uS8@)=uss(L) = 0.
846 Глава 9. Методы рядов Фурье
(Ь) Покажите, что температура в переходном процессе (нестационарная (неустановившаяся)
температура)
utr(x, t) = u(x, t) — uss(x)
является решением граничной (краевой) задачи (задачи, в которой заданы граничные
(предельные, или краевые) значения)
дщт _ , d2utT
dt " k dx* ;
tltr@,t) = tltr(L,t)=0,
utv(x,0) = g(x) = f{x) - uss(x).
Следовательно, отсюда и из формул C4) и C5) можно заключить,что
u(x, t) = uss(x) + 2Z cn exp (—n 7Г kt/L ) sin -
Т17ГХ
zn exp {—n~7T~kt/b~) sin
n=l
где
о г тътгх
Cn = у [/(ж) - -Use (ж)] sin -— da;.
21. Ответ на часть (а) задачи 20 дает формула uss(x) = Cx(L — x)/2k. Пусть f(x) = 0 в задаче 20,
т.е. первоначально стержень был нагрет до нулевой температуры. Из результата части (Ь)
' выведите, что ,
. ч СХ/Т v 4CL2 v~> 1 / 2 2U/r2\ • П7ГХ
U^ )= 2fc( } ~"lb^- 2^ ^ехр(-птг fct/L )sin—.
п нечетное
22. Рассмотрим температуру u(x, t) в голом тонком проводе, причем г*@, t) = u(L, t) = 0 и 1г(ж, 0) =
= /(ж). Пусть его боковая поверхность не изолирована, потому провод теряет теплоту, которая
рассеивается в окружающей среде (в которой поддерживается нулевая температура) со
скоростью, пропорциональной к u(x, t). (а) Выведите из результата задачи 19, что
du . d*u .
где h — положительная константа, (b) Затем подставьте
u(x,t) — e~htv(x,t)
и покажите, что v(x,t) является решением граничной (краевой) задачи (задачи, в которой
заданы граничные (предельные, или краевые) значения), решение которой дается формулами C0)
и C1). Отсюда выведите, что
оо
ПЖХ
( х\ -htXT^ / 2 2,./г2\ • ™~*
i(x, t) = e > Cn exp (—n it kt/L ) sin ——,
где
Cn~ T\ *^x' sin "IT"
. 23. Рассмотрим плиту с коэффициентом теплопроводности К, занимающую область 0 ^ х S L.
Предположим, что в соответствии с законом Ньютона для охлаждения каждая грань плиты
теряет теплоту, рассеивая ее в окружающей среде (в которой поддерживается нулевая температура)
9.5. Теплопроводность и разделение переменных 847
со скоростью Ни калорий в секунду на квадратный сантиметр. Выведите из уравнения B), что
температура и(х, t) в плите удовлетворяет граничным условиям
hu@, t) - ux@, t) = 0 = hu(L,t) + ux(L,t)9
где h = Н/К.
24. Рассмотрим изолированный с боковых сторон стержень длиной L, имеющий коэффициент
температуропроводности к, причем начальная температура равна и(х,0) = f(x). Пусть его
конец х = L изолирован, а в точке х = 0 поддерживается нулевая температура, (а) Отделите
переменные и покажите, что собственные функции имеют вид
Хп(х) = sin-TjT"
для п нечетных. (Ь) С помощью ряда по синусам для нечетного продолжения из задачи 21
в разделе 9.3, получите решение
TVKX
п нечетное
где
/ .\ V^4 / 2 2i . i a t1\ • Т17ГХ
u(x,t) = > Сп ехр (—п 7Г kt/AL ) sin -777-,
Сп = 1\ /(ж)sm ~2£~ dx'
9.5. Приложение. Исследование нагретого стержня
Сначала давайте исследуем численньщи методами функцию, задающую распределение
температур
2^2 и+\ П7ГХ
t j\ 4tX0 V^ 1 ( Г127Г2 kt\
n нечетное ч -^
в нагретом стержне из примера 2. Его длина L = 50 см, начальная температура повсюду
uo = 100° С, а коэффициент температуропроводности А; = 0,15 (для железа). Следующая
функция пакета Матъав суммирует первые N отличных от нуля членов этого ряда.
function u = u(x,t) % функция
к = 0.15; % коэффициент диффузии для железа
L = 50; % длина стержня
и0 = 100; % начальная температура
S = 0; % начальная сумма
N = 50; % число членов
for n = 1:2:2*N+1; % цикл для
S = S + (l/n)..*exp (-nA2*piA2*k*t/LA2) .*sin (n*pi*x/L) ;
end % конец
u = 4*uO*S/pi;
С помощью этой функции были вычерчены рис. 9.5.7-9.5.10. Соответствующие функции
совсем несложно написать и на входных языках систем Maple и Mathematica. На практике
достаточно взять N--'= 50 членов, чтобы найти значение u(x,t) за 10 секунд (или чуть
больше) с точностью до двух десятичных знаков на всем интервале 0 ^ х -^ 50. (Можете ли
вы проверить это утверждение?)
848 Глава 9. Методы рядов Фурье
Рис. 9.5.7. График и(х,30) -
распределение температур в
стержне после 30 секунд
50
40
30
20
10
°0 , Ш 20 30 40 50
Рис. 9.5.8. График и(х, 1800) -
распределение температур в
стержне после 30 минут
1 1
/
ь /
J :
/ , ,
1 1
\
\
•• \-
\
1 1 \
l\j\j
90
80
70
60
з 50
40
30
20
10
°(
■^
-\
- \
-
)
1 1 1 1
\ и = и B5,0
-г- •
i
• V. . : .
III!
2000 4000
t
1
... _
. . _
-
- -
. . _
-
. .
*"~^«^,„,„,
6000
50.5
Рис. 9.5.9. График иB5,£) -
температура середины стержня
50.4 h
50.3
50.2
50.1
а 50.0
49.9
49.8
49.7
49.6 V
49.5
и = иB5,0
1570 1572 1574 1576 1578 1580
t
Рис. 9.5.10. Увеличение графика
it B5, t) — температура середины
стержня
График и(х, 30) на рис. 9.5.7 показывает, что после 30 секунд стержень охладился
значительно только около обоих его концов и все еще имеет температуру около 100° С для
10 _ х _ 40. На рис. 9.5.8 показан график и(х, 1800) после 30 минут; из него видно (?), что
максимальная температура стержня всегда достигается в его середине, где х = 25.
График иBБ, t) для двухчасового периода показан на рис. 9.5.9; из него видно, что
температура середины чуть больше чем за 1500 секунд B5 минут) падает до 50°. На рис. 9.5.10
показан увеличенный график в окрестности его точки пересечения с горизонтальной линией
и = 50; из него видно, что фактически для снижения температуры до 50 ° в середине стержня
нужно приблизительно 1578 секунд B6 минут 18 секунд).
, А теперь, в этом же духе проведите исследование вашего собственного стержня с
постоянной начальной температурой f(x) = То = 100. Для этого положите
£=100+Юр и fc = l + @,l)g,
где р—наибольшая, ад—наименьшая отличная от нуля цифра номера вашего студенческого
билета.
9.6. Колебания струны и одномерное волновое уравнение 849
1. Пусть на обоих концах стержня поддерживается нулевая температура. Определите,
сколько времени (с точностью до секунды) потребуется для того, чтобы температура
середины стержня упадала до 50°.
2. Пусть конец х = L стержня изолирован, а на конце х = 0 поддерживается нулевая
температура. Тогда функция, задающая распределение температур и(х, t),
разлагается в ряд Фурье из задачи 24 из этого раздела. Определите, сколько времени
потребуется для того, чтобы максимальная температура, достигаемая в какой-нибудь
точке стержня, стала равной 50°.
9.6. Колебания струны и одномерное волновое
уравнение
Хотя Фурье систематизировал метод разделения переменных, тригонометрические решения
дифференциальных уравнений в частных производных в виде ряда появились еще до него
в более ранних исследованиях колебаний струны, выполненных в XVIII столетии Леонардом
Эйлером, Жаном Лероном Даламбером и Даниилом Бернулли. Чтобы получить
дифференциальное уравнение в частных производных, которое моделирует колебания струны, мы
начинаем изучение этого вопроса с рассмотрения гибкой однородной струны с линейной
плотностью р (в граммах на сантиметр или в слагах (единица массы в системе фунт-сила)
на фут), натянутой силой растяжения Т (дины или фунты) между фиксированными точками
х = 0 и х = L. Предположим, что, поскольку струна колеблется в плоскости ху около ее
положения равновесия, каждая точка перемещается параллельно оси у, так что мы можем
обозначить через у(х, t) смещение в момент времени t точки х струны. Тогда для любого
фиксированного значения t форма струны в момент времени t представляет собой кривую
у = у(х, t). Мы предполагаем также, что отклонение струны остается настолько
небольшим, что аппроксимация sin# « tg# = yx(x,t) весьма точна (рис. 9.6.1). Наконец, мы
предполагаем, что в дополнение к внутренним силам растяжения, действующим по
касательной к струне, на нее действует внешняя вертикальная сила с линейной плотностью F (х),
выраженная в подходящих единицах, например в динах на сантиметр или фунтах на фут.
Мы хотим применить второй закон Ньютона F = та к короткому сегменту струны
(массой рАх), который соответствует интервалу [ж, х -Ь Ах], причем вертикальное ускорение
а его середины равно yu(x,t). Учитывая вертикальные компоненты сил, показанных на
\У F(x)Ax
\ Т
/т j j
_] i I i
х х х + Лх х
Рис. 9.6.1. Силы на коротком
сегменте колеблющейся струны
850 Глава 9, Методы рядов Фурье
рис. 9.6.1, мы получим
(р Ах) • уи (#, t) « Г sin@ + Ав) - Г sin в + F(z) Да; »
« Т</Ж(х + Дж, *) - Tyx(x, t) + F(S) Ax,
так что деление на Ах дает
р t) иTyx(x + AX,t)-yx(X,t) +
• ■ Дх
Если перейти к пределу при Ах —► 0 и ж —► я, мы получим дифференциальное уравнение
в частных производных
которое описывает вертикальные колебания гибкой струны с постоянной линейной
плотностью р и растяжением Т под влиянием внешней вертикальной силы с линейной
плотностью F(x).
Если положить
а2 = - B)
Р
и F(x) = 0 в уравнении A), мы получим одномерное волновое уравнение
> ^=а^ C)
которое моделирует свободные колебания однородной гибкой струны.
Если концы струны в точках х==0их = £на оси х фиксированы, то соответствующие
условия в конечных точках имеют вид
y@,t) = y(L,t) = 0. D)
Наша физическая интуиция в данной ситуации подсказывает, что движение струны будет
определено, если мы определим как функцию, задающую начальное положение струны
£(x,0) = /(x) @<x<L), E)
так и функцию, выражающую начальную скорость струны
yt(x,0)=g(x) @<x<L). F)
Объединяя уравнения C)-F), мы получаем граничную (краевую) задачу (задачу, в которой
заданы граничные (предельные, или краевые) значения)
0 = а20 @<x<L,t>0); Ga)
>- y@,t) = y(L,t) = 0, Gb)
y(x,0) = f(x) @<x<L), G<0
Vt(x,0) = g(x) @<x<L) Gd)
для функции, выражающей смещение у(х, t) струны с фиксированными концами,
совершающей свободные колебания, причем начальное положение выражено функцией /(х),
а начальная скороЫъ—функцией д(х):
9.6. Колебания струны и одномерное волновое уравнение 851
Решение методом разделения переменных
Подобно уравнению теплопроводности, волновое уравнение Gа) линейно: любая линейная
комбинация двух решений снова будет решением. Другое подобие состоит в том, что условия
в конечных точках в GЬ) являются однородными. К сожалению, условия Gс) и Gd)
неоднородны; так что нам придется иметь дело с двумя неоднородными краевыми (граничными)
условиями.
Как мы уже говорили в разделе 9.5, в методе разделения переменных используется
линейная комбинация (суперпозиция, или наложение) решений, удовлетворяющих однородным
условиям, для того, чтобы получить решение, которое также удовлетворяет единственному
неоднородному граничному условию. Чтобы приспособить этот метод к сложившейся
ситуации, мы руководствуемся стратегическим принципом "разделяй и властвуй" и разбиваем
задачу G) на следующие две отдельные граничные задачи, каждая из которых содержит
только одно неоднородное граничное (краевое, предельное) условие:
'г■,' ■ }'\, '■>; У>7£tti,fr■ АЛт,,,,;, t.".у;аiwlr:,,Аа »,- ^UXtiflfa,-Ufa ы? v, ;,:„ v/Л,
Уи = а2Ухх', ytt = а2ухх'9
t/@, t) = у (L, t) = 0, 2/@, t) = t/(L, t) = 0,
y(x,0) = f(x)9 2/(ж,0)=0,
l/t(a?,0) = 0. 2/t(a?,0) = #(ж).
Если мы сможем отдельно найти решение у а (х, t) задачи А и решение у в (х, t) задачи В, то
их сумма у(х, t) = у а (#, £) + ув(х, t) будет решением первоначальной задачи G), потому
что
у(х, 0) = уА(х, 0) + ув(х, 0) = f(x) + 0 = /(ж)
и
»t(s, 0) = {»лЬ(я?, 0) + {увЫх, 0) = 0 + 0(ж) = ^(я?).
Так что давайте будем решать задачу методом разделения переменных. Подстановка
y(x,t)=X(x)T(t) (8)
в уи = а2ухх приводит к XT" = а2Х"Т, где (как и прежде) мы пишем X" вместо Хп{х)
и Т" вместо Т"(£). Поэтому
■у-П rjMl
— = — (9)
X а?Т w
Функции X"/X переменной х и Т"/а2Т переменной £ могут быть равны для всех х ut9
только если каждая из них равна одной и той же самой константе. Следовательно, мы можем
заключить, что
ЛГИ грц
для некоторой константы А; злак "минус" вставлен здесь просто для того, чтобы облегчить
распознание задачи на собственные значения A3). Таким образом, наше дифференциальное
852 Глава 9. Методы рядов Фурье
уравнение в частных производных распадается на два обыкновенных дифференциальных
уравнения
Х" + \Х = 0, A1)
Г" + Ха2Т = 0. A2)
Согласно условиям в конечных точках
2/@, *) = X@)T(t) = 0, y(L, t) = X(L)T(t) = 0
требуется, чтобы Х@) = X(L) = 0, если решение T(t) нетривиально. Следовательно,
теперь ясно, что функция Х(х) должна быть решением знакомой задачи на собственные
значения
X" + XX = 0, Х@) = X(L) = 0. A3)
Как в уравнениях B3) и B4) из раздела 9.5, собственными значениями этой задачи являются
числа
2 2
А„ = ^-, п = 1,2,3,..., A4)
а собственная функция, соответствующая числу А„, имеет вид
гпгх
Хп(х) = sin——, п = 1,2,3, A5)
Теперь мы возвращаемся к уравнению A2). Из однородного начального условия
yt(x,0)=X(x)T'@) = 0
следует, что Х"@) = 0. Поэтому, решение Tn(t) соответствующее собственному значению
Лп = n27r2/L2, должно удовлетворять условиям
Т,? + ^^Гп = 0, 2^@) = 0. A6)
Общее решение дифференциального уравнения A6) имеет вид
m / ч л rnrat п . rnrat _„ч
Tn(t) = An cos -J- + Bn sin ——. A7)
Его производная
., ч гпта ( . . rnrat „ П7га£ \
Г^(*) = — ( -An sin — + Бп cos -j— J
удовлетворяет условию Т^@) = 0, если Вп = 0. Таким образом, нетривиальное решение
уравнения A6) имеет вид
m , ч rnrat _ЛЧ
Тп(*)=сюв—-. A8)
9.6. Колебания струны и одномерное волновое уравнение 853
Мы комбинируем (объединяем) результаты в равенствах A5)иA8)и получаем
бесконечную последовательность функций-произведений
/ \ -чг / \т / \ nirat . пттх __ч
yn(x,t) = Xn(x)Tn(t) = cos —— sin -^-, A9)
n = 1,2,3, Каждая из этих функций-кирпичиков нашего решения удовлетворяет и
волновому уравнению уи = а2уХХ9 и однородным граничным условиям в задаче А. Сложением
их (принцип суперпозиции!) мы получаем бесконечный ряд
со со ,
уп(х, t) = 2_ AnXn(x)Tn(t) = 2^An cos -j— sm -^-. B0)
n=l n=l
Остается только выбрать коэффициенты {Ап} так, чтобы удовлетворить неоднородному
граничному условию
2/(x, 0) = f>n sin ^ ==/(*) B1)
для 0 < х < L. Но этот ряд будет расположенным по синусам рядом Фурье функции f(x)
на интервале [0, L] при условии, что мы положим
> Ап = | f /(ж) sin ^ da?. B2)
Таким образом, наконец мы видим, что формальное решение задачи А в виде ряда имеет вид
w / \ v^ a mrat . шгж
> У (М) = l^An cos —— sm -j-, B3)
n=l
причем коэффициенты {An}i° вычисляются по формуле B2). Обратите внимание, что
ряд B3) получен из расположенного по синусам ряда Фурье функции f(x) просто
вставкой множителя cos(nirat/L) в n-й член. Обратите внимание также, что этот член имеет
[круговую] частоту ип = птга/L.
Пример 1
Из предыдущего немедленно следует, что решением граничной (краевой)
задачи (задачи, в которой заданы граничные (предельные, или краевые)
значения)
0=4S @<*<-,*>0);
у(х, 0) = ^ sin3 х = ^j sin х — ^ sin Зх,
yt(x,0)=0,
для которого L = 7г и а = 2, является функция
y(x,t) = ^ cos2£ sinx — ^ cos6i sin3x.
854 Глава 9. Методы рядов Фурье
Причина состоит в том, что расположенный по синусам ряд Фурье
функции f(x) имеет коэффи
коэффициенты Ап = 0.
ции f(x) имеет коэффициенты А\ — Jr, A3 — — зЬ» а все остальные
Пример 2
Оттянутая струна На рис. 9.6.2 показана функция, выражающая
начальное положение f(x) натянутой струны (длины L), которая
приводится в движение в результате смещения (оттягивания) ее середины х = L/2
в сторону на расстояние \bL и последующего отпускания ее из состояния
покоя в момент времени t = 0. Соответствующая граничная (краевая)
задача (задача, в которой заданы граничные (предельные, или краевые)
значения) имеет вид
Уи = а2Ухх @ < х < L9 t> 0);
y@,t) = y(L,t) = 0,
у(ж,0)да/(аг),
t/t(*,0) = 0,
где f(x) ±= Ьх для 0 ^ ж ^ L/2 и /(ж) - b(L - ж) для L/2 ^ аг ^ £.
Найдем г/(x,t).
Рис. 9.6.2. Начальное
положение оттянутой струны из
примера 2
Решение Сначала вычислим n-й коэффициент расположенного по синусам ряда
Фурье функции f(x). Он имеет вид
2 [L Tiitx
^п = 7 ^х)sin "У- dx ==
rL/2
Jo
из этого следует, что
2 Гг\ . птгх _, 2 Г 1/г ч . птгя _,
-г ox sm —г— ах + -г- | o(L — #) sm —— ах;
L JO ^ ^ Jl/2 ^
п — 9 9
4Ы/ . П7Г
sm-—-.
П*7Г* 2
9.6. Колебания струны и одномерное волновое уравнение 855
Следовательно, уравнение B3) дает формальное решение в виде ряда
, ч 4ЬЬ^ 1 .
АЬЬ ^-^ 1 . П7Г -П7га£ . пжх
—г- sm —- cos —-— sm ——
n2 2 L L
n=l
4bL ( 7rat . 7гх 1 37га£ . Зкх \ ,_.ч
= i^Vcos^sm^~^cos~sin~ + '' J' m
Музыка
В многочисленных знакомых музыкальных инструментах для генерации звука
используются колебания струны. Когда струна вибрирует с заданной частотой, колебания на этой
частоте передаются через воздух в форме периодических изменений плотности воздуха —
эти изменения как раз и называются звуковыми волнами — к уху слушателя. Например,
среднее С — тон с частотой приблизительно равной 256 Гц. Когда несколько тонов звучат
одновременно, комбинация воспринимается как гармоничная, если отношения их частот
примерна равны отношению маленьких целых чисел; в противном случае многие люди
считают такую комбинацию диссонантной (неприятной на слух).
Ряд в равенстве B3) представляет движение струны как наложение (суперпозицию)
бесконечно многих колебаний с различными частотами. В этом ряде n-й член
mvat . птгх
17
представляет колебание с частотой
(Гц). B5)
Наиболее низкая из этих частот
*=щ-Р (Гц) B6)
называется основной частотой (частотой основной (первой) гармоники, (наинизшей)
собственной частотой), и она обычно преобладает в звуке, который мы слышим. Частота
vn — nv\ n-го обертона, или высшей гармоники, представляет собой (целое) кратное
i/i, и потому-то звук одного отдельного колебания струны является гармоничным, а не
диссонантным (неприятным на слух).
Обратите внимание, что в уравнении B6) основная частота (частота основной (первой)
гармоники, (наинизшая) собственная частота) v\ пропорциональна у/Т и обратно
пропорциональна L и у/р. Таким образом, мы можем удвоить эту частоту—и, следовательно, получить
основной тон на одну октаву выше—или делением на два длины L или учетверением
растяжения Г. Начальные условия не влияют на v\; вместо этого они определяют коэффициенты
в B3) и, следовательно, степень, в которой более высокие гармоники вносят вклад в
генерируемый звук. Поэтому начальные условия влияют на тембр или на всю смесь частот, а не на
856 Глава 9. Методы рядов Фурье
основную частоту (частоту основной (первой) гармоники, (наинизшую) собственную
частоту). (Технически это истинно только для относительно маленьких смещений струны; если
вы ударяете по клавише фортепьяно довольно сильно, то вы сможете обнаружить небольшое
и краткое начальное отклонение от обычной частоты ноты.)
Согласно одной (довольно упрощенной) теории слуха, громкость звука, генерируемого
колебаниями струны, пропорциональна его общей [кинетической плюс потенциальной]
энергии, которая выражается формулой
Е
J0
дЛ\\Т
dt]
dx. B7)
В задаче 17 мы просим вас показать, что подстановка ряда B3) в формулу B7) дает
П=1
Отношение n-го члена п2 А2 к сумме J2 п2А^ — это та часть всего звука, которая относится
к п-й гармонике.
Мы иллюстрируем эту теорию с помощью ряда B4), который описывает движение
оттянутой струны из примера 2. Обратите внимание, что четные гармоники отсутствуют и что
Ап = 4ЪЬ/(-к2п2) для нечетных п. Следовательно, равенство B8) дает
тг^Т у^ 2 Wb2L2 _ 4b2LT ^ _1_
4L ^ П 7Г4П4 7Г2 ^ П2'
n нечетное п нечетное
так что часть (точнее, отношение части к целому) звука, соответствующего п-й гармонике
(для п нечетного), равно
1/п2 1/п2 8
J2 1Л*2 *2/8
п нечетное
Подставляя п = 1 и п = 3, мы находим, что 81,06% звука, генерируемого струной из
примера 2, приходится на основной тон и только 9,01% приходится на гармонику,
соответствующую п = 3.
Решение Даламбера
В отличие от решений уравнения теплопроводности в виде рядов, формальные решения
волнового уравнения в виде рядов обычно не удовлетворяют достаточным условиям
почленной дифференцируемости, которые необходимы для проверки решения с помощью теоремы
о суперпозиции (наложении), аналогичной той, которая была сформулирована в разделе 9.5.
Например, почленное дифференцирование ряда в равенстве B4) привело бы к ряду
д2у 4Ь v^ . ^тг mrat . п-кх
^ = --^smTcos^sm—,
который вообще не сходится, потому что коэффициент 1/п2 как раз был тем множителем,
который обеспечивал сходимость, но он исчез после второго дифференцирования.
9.6. Колебания струны и одномерное волновое уравнение 857
Есть, однако, альтернативный подход к проверке решения B3), и он позволяет получить
ценную дополнительную информацию о решении. Если мы применим тригонометрическое
тождество
2 sin A cos В = sin(A + В) + sin(A - В)
для А = п-тгх/Ь и В = n-irat/L, то равенство B3) приведет к формуле
сю ,
у(х, t) = 2^An sin —- cos —— =
n=l
сю
1 V^4 A . П7Г / \ 1 V^4 Л • П7Г / \ /ЛЛЧ
= - 2^ Ап sm —{х + at) + -2^An sm — (х - at). B9)
n=l n—1
Но по определению коэффициентов
оо
Лп sm -^- = F(x)
для всех х, где F(x) представляет собой нечетное продолжение функции f(x), дающей
начальной положение, причем ее период считается равным 2L. Следовательно, уравнение B9)
означает, что
> у(х, t) = \ [F(x + at) + F(x - at)}. C0)
Поэтому ряд в B3) сходится к выражению в правой части равенства C0), которое известно
как форма Даламбера решения задачи о колебании струны. Кроме того, используя цепное
правило дифференцирования сложной функции, просто проверить (задачи 13 и 14), что
функция y(x,t)9 определенная равенством C0), действительно удовлетворяет уравнению
у и = а2 У хх (в предположении, что F является дважды дифференцируемой), так же как
и граничным условиям 2/@, t) = y(L, t) = 0 и у(х, 0) = f{x).
Для любой функции F(x) функции F(x + at) и F(x — at) представляют "волны",
перемещающиеся соответственно налево и направо по оси х со скоростью а. Это показано на
рис. 9.6.3, на котором вычерчены графики этих двух функций для последовательных
значений t в типичном случае, когда функция F(x), дающая начальное положение, представляет
собой импульсную функцию, причем импульс сосредоточен в середине х = -к 12 струны
длиной L = 7г, а а = 1 (так что основной период колебаний равен 27г). Таким образом, решение
Даламбера C0) выражает у(х, t) в виде суперпозиции (наложения) двух волн,
двигающихся в противоположных направлениях со скоростью а. Вот почему уравнение у и = а2ухх
называют волновым уравнением.
Струны с начальной скоростью
Решение методом разделения переменных задачи В с начальными условиями у(х, 0) == 0
и yt{x, 0) = д(х) до уравнения A6) выполняется точно так же, как и решение задачи А. Но
потом из у(х, 0) = Х(х)Т@) = 0 выводится, что Г@) = 0, так что вместо A6) мы имеем
d2Tn п27г2а2m m /лЧ ^,ч
-^Г + —12— Г" = 0' тп@) = 0. C1)
858 Глава 9. Методы рядов Фурье
(а) В момент времени t = О
(Ь) В момент времени t = nl%
л
(с) В момент времени / = я/4
(d) В момент времени / = Зп1%
Рис. 9.6.3. Импульс F(x) производит две волны: одна перемещается
налево, другая — направо
Из равенства A7) следует, что нетривиальное решение уравнения C1) должно иметь вид
nnat
Tn(t) = sin ■
Поэтому получающееся решение в виде формального степенного ряда имеет вид
оо
у{х, t) = ]Р Вп sin —— sin
n=l
птгх
так что мы хотим выбрать коэффициенты {Вп } так, чтобы
оо
*(ж,0) = 2^^-y-sm—- =
УЛ
flO*0-
C2)
C3)
C4)
n=l
Таким образом, мы хотим, чтобы Вп • птга/L были коэффициентами Ъп расположенного по
синусам ряда Фурье функции д(х) на интервале [О, L]:
птга 2 fL . птгх
Бп—- = Ьп = -- #(#) sin —- dx.
Поэтому мы полагаем
Вп =
Jo
П7ГЖ ,
sm —т— ах,
шга Jn L
чтобы у(х, i) в C3) было формальным решением задачи В в виде ря,ца.
C5)
9.6. Колебания струны и одномерное волновое уравнение 859
Пример 3
Рассмотрим струну в гитаре, лежащей сзади поперек пикапа, который
в момент времени t = 0 с грохотом врезается в кирпичную стену со
скоростью ?;о- Тогда д(х) = vq, так что
2 fL . ппх 2v0L
Вп = v0 sin —- dx = -5-у- 1 - (-1)п .
ппа J0 L nznza
Следовательно, ряд в C3) принимает вид
2/ОМ) = —т- У) ~о{
—г— > "о Sin —— Sin -p-.
7г2а ^-^ rz2 L L
п нечетное
Если мы продифференцируем ряд в C3) почленно по t, мы получим
оо ,
yt(x, t) = 2_^Ьп sm —— cos -у- = ± [G(# + at) + G(x - at)], C6)
n=l
где G—нечетное периода 2L продолжение функции д(х), выражающей начальную скорость.
(Здесь мы использовали тот же самый прием, что и при выводе уравнения C0).) В задаче 15
мы просим вас вывести формулу
у(х, t) = — [Н(х + at) + Н(х - at)] , C7)
2a
где функция Н (х) определена так:
Н(х)= \ G(s)ds. C8)
Jo
Пусть теперь, наконец, струна имеет отличные от нуля обе функции: функцию, дающую
начальное положение у(х,0) = /(х), и функцию, выражающую начальную (отличную
от нуля!) скорость yt{x, 0) = д(х). Тогда мы можем получить функцию, выражающую ее
смещение, прибавляя решения Даламбера задач А и В, поставленных в уравнениях C 0) и C 7)
соответственно. Следовательно, колебания этой струны с общими начальными условиями
дает функция
Vfa t) = l [F(x + at) + F{x - at)} + ^- [H(x + at) + H(x - at)), C9)
jl &a
являющаяся суперпозицией (наложением) четырех волн, двигающихся вдоль оси х со
скоростью а, причем две из них перемещаются налево и две — направо.
9.6. Задачи
В задачах 1-10 найдите решения граничных (краевых) задач (задач, в которых заданы граничные
(предельные, или краевые) значения).
1. ytt = tyxx, 0 < х < 7г, t > 0; у@,£) = y(n,t) = 0, у(х,0) = ^ sin2x, yt(x,0) = 0
2. ytt = Ухх,0 < x < 1, t > 0;y@,t) = y(l,t) = 0, y(x,0) = ^sin7rx- ~ sin37rx, yt(x,0) = 0
860 Глава 9. Методы рядов Фурье
3. 4уи = Ухх, 0 < х < 7г, t > 0; 2/@,t) = y(n,t) = 0, y(x,0) = 2/t(x,0) = ^ sinx
4. Aytt = Ухх, 0 < х < 2, £ > 0; 2/@, £) = 2/B, t) = 0, 2/(#, 0) = \ sin 7гх cos 7гх, yt(x, О) = О
5. уи = 25уХХ9 0 < х < 3, t > 0; 2/@, £) = 2/C, £) = 0, у(х, 0) = \ sin 7гх, 2/t(x, 0) = 10 sin 2ттх
6. 2/tt = 1002/хх, 0 < х < тг, t > 0; у@, t) = у(тг, t) = 0, у(х,0) = х(тг - х), у*(ж, 0) = О
7. 2/tt = lOOj/**, 0 < ж < 1, * > 0; 2/@, t) = 2/A, *) = 0, у (ж, 0) = 0, yt(x, 0) = х
8. 2/tt = 4ухх, 0 < х < 7r9t> 0; 2/@, £) = y(ir, t) = 0, 2/(ж, 0) = sin х, 2/t(x, 0) = 1
9. 2/tt = 42/ж:Е, 0 < х < 1, t > 0; 2/@, t) = 2/A, t) = 0, y(x,Q) = 0, j/t(a?,0) = x(l - x)
10. 2/tt = 25yxx, 0 < x < тг, t > 0; 2/@, t) = j/(tt, t) = 0, y(x, 0) = yt(x, 0) = sin2 x
11. Предположим, что струна длиной 2 фута весит ^ унции и растянута с силой 32 фунта. Найдите
основную частоту (частоту основной (первой) гармоники, (наинизшую) собственную частоту),
с которой она колеблется, и скорость, с которой волны колебаний бегут по ней.
12. Покажите, что амплитуда колебаний середины струны из примера 3 выражается формулой
(L кЛ - 4v°L V — -
У[ 2'2а J ~~ тг2а ^ n2 ~
тг нечетное
VoL
а"'
Пусть теперь это струна из задачи 11, а прицельная скорость пикапа равна 60 миль в час.
Покажите, что амплитуда в этом случае приблизительно равна 1 дюйму.
13. Предположим, что функция F{x) дважды дифференцируема для всех х. Используя цепное
правило дифференцирования сложной функции, проверьте, что функции
y(x,t) = F(x + at) и y(x,t) = F(x — at)
удовлетворяют уравнению у и = а2 Ухх.
14. Пусть функция F(x) дифференцируема, нечетная и имеет период 2L. Покажите, что функция
2/(х, t) = \ [F(x + at) + F(x - at)}
удовлетворяет условиям 2/@, t) = y(L, t) = 0, y(x, 0) = F(x) и yt(x, 0) = 0.
15. Если 2/(x, 0) = 0, то из уравнения C6) следует (почему?), что
2/(x,t) = | G(x4-ar)dr+| G(x-ar)dr.
Jo Jo
Сделайте соответствующие подстановки в этих интегралах, чтобы получить уравнения C7)
и C8).
16. (а) Покажите, что подстановки u = x + atnv = x — at преобразуют уравнение у и = а2 у.
'XX
в уравнение yuv = 0. (b) Заключите отсюда, что каждое решение уравнения уи = а2ухх имеет
форму
2/(х, t) = F(x + at) + G(x - at),
которая представляет две волны, перемещающиеся в противоположных направлениях, каждая
со скоростью а.
17. Предположим, что
, ,ч v-^ . nirat . П7тх
2/(х, t) — 2^Лп cos —■=-— sin -у-.
п=1
Возведите в квадрат производные yt и ух и затем проинтегрируйте почленно с учетом
ортогональности функций синуса и косинуса и проверьте, что
н>
4L
П=1
9.6. Колебания струны и одномерное волновое уравнение 861
18. Рассмотрим натянутую струну, первоначально находящуюся в покое; ее конец в точке ж = О
фиксирован, а ее конец в точке х = L частично свободен — он может скользить без трения по
вертикальной линии х — L. Соответствующая граничная (краевая) задача (задача, в которой
заданы граничные (предельные, или краевые) значения) имеет вид
Уи = а2ухх @ < х < L, t > 0);
y@,*) = y*(L,t) = 0,
y(x,0) = f(x),
yt(x,0) = 0.
Отделите переменные и используйте ряд по синусам для нечетного продолжения функции /(ж)
(как в задаче 24 из раздела 9.5) и получите решение
/ ч v^ . nirat . nirx
у (ж, t) = 2^ Лп cos ~2L~ Sm ~2lT '
n нечетное
где
A _ 2 fL Л/ ч . П7ГЖ
An~L
f(x) sin -—- dx.
о 2L
В задачах 19 и 20рассматриваются колебания струны под влиянием убывающей силы F(x) = — pg
тяжести. Согласно уравнению A), функция, выражающая смещение, удовлетворяет
дифференциальному уравнению в частных производных
с условиями в конечных точках у@, i) = y(L, t) = 0.
19. Предположим сначала, что струна висит в стационарном положении так, чтобы у = у{х)
и уи = 0, и, следовательно, дифференциальное уравнение ее движения имеет простую форму:
а2у" = д. Получите стационарное решение
y(*) = 0(*) = g(*-L).
20. Теперь предположим, что струна отпущена из состояния покоя в равновесии; следовательно,
начальные условия имеют вид у (ж, 0) = 0 nyt(x,0) = 0. Определите
v(x,t) = у(х,1)-ф(х),
где ф(х) — стационарное решение из задачи 19. Выведите из уравнения D0), что v(x,t) является
решением граничной (краевой) задачи (задачи, в которой заданы граничные (предельные, или
краевые) значения)
vtt = a vxx]
v(fl,t) = v(L,t) = 0,
и(ж,0) = -</>(ж),
vt(x,Q) = 0.
Выведите из уравнений B2) и B3) формулу
, , ч , / х v~^ . nirat . П7гж
у(х, t) - ф(х) = 2_^ An cos —— sm ——,
n=l
где коэффициенты {Ап} — это коэффициенты расположенного по синусам ряда Фурье функции
/(х) = —ф(х). Наконец, объясните, почему из этого следует, что струна колеблется между
положениями у = 0 и у = 2ф(х).
862 Глава 9. Методы рядов Фурье
21. Пусть струна вибрирует в воздухе, причем сопротивление струны пропорционально
скорости. Тогда граничная (краевая) задача (задача, в которой заданы граничные (предельные, или
краевые) значения) примет вид
У и = а2 у хх - 2hyt\
y@,t) = y(L,t) = 0,
y(x,0) = f(x),
2/tOr,0) = 0.
Предположим, что 0 < h < ка/L. (а) Подставьте
y(x,t) = X(x)T(t)
в D1) и получите уравнения
X" + XX = О, Х@) = X(L) = 0 D2)
и
Т" + 2hT' + a2 XT = О, Т'@) = 0. D3)
(Ь) Собственные значения и собственные функции уравнения D2) имеют вид
ч П27Г2 __ / ч . WKX
An = -yj- И Лп(х) = S1I1 —р-
(как обычно). Покажите, что при Л = п2тг2/Ь2 общее решение дифференциального уравнения
в D3) имеет вид
Tn(t) = e~ht (Ап cosujnt + Bn sinu>nt),
где шп = у/(п2тг2а2/Ь2) — /i2 < птга/L. (с) Покажите, что из Tn@) = 0 следует, что J9n =
= hAn/ojn, и, следовательно, с точностью до постоянного множителя
Tn(t) — e~ht cos {(jjnt — an),
где an = axctg(/i/u;n). (d) Наконец, заключите, что
oo
y(x, t) = e 2^ °^ cos (<*>"* - an)sm ~T~'
n=l
где
On
fix) sin —=— dx.
ran Jo W Ь
Lcosc
Из этой формулы мы видим, что сопротивление воздуха имеет три главных эффекта:
экспоненциальное затухание амплитуд, уменьшение частоты ujn < пка/L и введение углов задержки
по фазе ап.
22. Заново решите задачу 21 следующим образом. Сначала подставьте у(х, t) = e~htv(x, t) в
уравнение D1) и затем покажите, что граничная (краевая) задача (задача, в которой заданы
граничные (предельные, или краевые) значения) для v(x, t) имеет вид
2 . 1 2
vtt = cl vxx -f a v\
v@,t) = t;(L,t) = 0,
*(я,0) = /(*),
vt(x,Q) = hf(x).
9.6. Колебания струны и одномерное волновое уравнение 863
Затем покажите, что подстановка v(x, t) .== X(x)T(t) приводит к уравнениям
X" + XX = О, Х@) = X(L) ±= О,
Т" + (Ла2 - h2)T = 0.
Продолжая в этой манере, получите решение у (ж, £), данное в части (d) задачи 21.
Снимки струны на рис. 9.6.4 показывают последовательные положения колеблющейся струны
длиной L = 7г и а = 1 (тяк что период ее колебания равен 2п). Струна первоначально находится
в покое, причем ее конечные точки фиксированы, а в момент времени t = 0 она приводится
в движение, причем функция, дающая ее начальное положение, имеет вид
/(ж) = 2 sin х == 1 г- cos 2x.
D4)
(а) В момент времени / = 0
(b) B момент времени / = я/16
/
\ '
(с) В момент времени / = я/8
(d) B момент времени / = Зя/16
(е) В момент времени / = я/4
(f) В момент времени / = 5я/16
(g) В момент времени / = Зя/8 (h) В момент времени / = 7я/16 (i) В момент времени / - я/2
Рис. 9.6.4. Последовательные снимки колебаний струны в задачах 23 и 24
23. Самый интересный снимок — тот, что на рис. 9.6.4 (е), из которого видно, что струна имеет
(пусть всего лишь на мгновение) плоский участок в момент t = 7г/4. И в самом деле, примените
формулу Даламбера C0), чтобы доказать, что функция, дающая положение струны y(x,t),
удовлетворяет условию
864 Глава 9. Методы рядов Фурье
24. (а) Покажите, что функция /(ж), дающая положение и определенная равенством D4), имеет
точки перегиба [f"(x) = 0] в точке х — 7г/4 и в точке х = 37г/4. (Ь) На снимках (а)-(е) на
рис. 9.6.4 видно, что эти две точки перегиба могут оставаться фиксированными в течение
некоторого начального периода времени колебаний струны. И действительно, с помощью формулы
Даламбера покажите, что если х = 7г/4 или х = 37г/4, то у(х, t) = 1 для 0 ^ t ^ 7г/4.
9.6. Приложение. Исследование колебаний струны
Здесь мы описываем применение системы Mathematica для исследования решения
Даламбера
у(ж, t) = \ [F(x + at) + F{x - at)} A)
задачи о колебаниях струны. С помощью системы Mathematica мы построим графики
движения при разнообразных начальных положениях струны. Несомненно, аналогичные
исследования можно выполнить и с помощью других подобных пакетов, например таких как
Maple и Matlab.
Чтобы начертить снимки; показанные на рис. 9.6.4, мы начали с функции, дающей
начальное положение
f [x_] := 2*Sin[x] А2
Чтобы определить нечетное периода 2-к продолжение F(x) функции /(#), мы
нуждаемся в функции s(x), которая сдвигает точку х на (целое) кратное 7г так, чтобы она попала
в интервал [0,7г].
s[x_J := Black[{k}, k = Floqr[N[x/Pi]];
If[EvenQ[k], (* Если к является четным *)
(* то *) N[x - k*Pi] ,
(* иначе *) N[x - k*Pi - Pi]]]
Тогда искомое нечетное продолжение определятся так:
F[x_] := If[s[x] > 0, (* то *) f[s[x]],
(* иначе *)-f[-s[x]]]
Наконец, решение Даламбера в A) принимает вид
G[x__, t__] := ( F[x + t] + F[x - t] )/2
Снимок положения струны в момент времени t определяется так:
stringAt[t_J := Plot[g[x,t], {x, 0, Pi} ];
Например, команда stringAt [ Pi/4 ] вычертит снимок, соответствующий t = 7г/4 (этот
снимок показан на рис. 9.6.4 (е)). На этом снимке отчетливо виден плоский участок, на
который указывалось в задаче 23. Мы можем и сразу начертить всю последовательность
снимков:
snapshots = Table[ stringAt[t], {t, 0, Pi, Pi/12}]
9.6. Колебания струны и одномерное волновое уравнение 865
Эти снимки можно анимировать и тем самым показать колебание струны в движении, или же
мы можем показать одновременно последовательные положения струны на одном рисунке
(рис. 9.6.5) с помощью команды Show [ snapshots ] (Показать [снимки]).
у
2\-
-1\-
* = 0
■Л-
" ""\
... - ,^ ,
/^
4V
'/. '\S.
Рис. 9.6.5. Последовательные
положения колеблющейся струны с начальным
положением f(x) = 2 sin2 x
Функция, выражающая начальное положение, задается так:
f[x_] := If [х < Pi/2, (* то *) х,
(* иначе *) Pi - х] // N
(соответствует треугольной волновой функции на рис. 9.2.4). С ее помощью генерируется
сложное изображение, показанное нарис. 9.6.6. Точно также задается функция, выражающая
начальное положение:
f [х_] := Which [ 0 <= х < Pi/3, x,
Pi/З <= х < 2*Pi/3, Pi/3,
2*Pi/3 <= x <= Pi, Pi - x ] // N
(соответствует трапецеидальной волновой функции рис. 9.2.5). С ее помощью генерируется
изображение, показанное нарис. 9.6.7.
Вы можете проверить свою реализацию метода Даламбера, пытаясь с ее помощью
самостоятельно воспроизвести рис. 9.6.6 и 9.6.7. Начальное положение, задаваемое "буферной
функцией"
/(s) = sin200 я, О^я^тг,
генерирует бегущие волны, перемещающиеся (первоначально) в противоположных
направлениях, как показано нарис. 9.6.3. Функция, задающая начальное положение
/(*)
-{
sin200 (х + §) для 0 < х < тг/2,
О ДЛЯ7г/2 < X < 7Г,
866 Глава 9. Методы рядов Фурье
Рис. 9.6.6. Последовательные Рис. 9.6.7. Последовательные
положения колеблющейся стру- положения колеблющейся
струны с треугольным начальным по- ны с трапецеидальным началь-
ложением ным положением
генерирует единственную (отдельную) волну, которая начинается в точке х — 0 и
(первоначально) перемещается направо. (Представьте себе скакалку, привязанную к дереву,
свободный конец которой внезапно испытывает резкое колебание в момент времени t = 0.)
После исследования некоторых только что указанных возможностей, попробуйте другие
функции, задающие начальное положение, по вашему собственному выбору. Подойдет,
например, любая непрерывная функция/, такая что/ @) = /Gг) = 0. Чем более экзотическим
получится колебание струны, тем лучше.
9.7. Установившаяся температура и уравнение
Лапласа
Мы теперь рассматриваем распределение температур в двумерной пластине или тонком слое,
который занимает область R (на плоскости жу), ограниченную кусочно гладкой кривой С,
как показано на рис. 9.7.1. Мы предполагаем, что грани пластины изолированы и что она
настолько тонкая, что ее температура не изменяется по перпендикуляру к плоскости ху. Мы
хотим определить (при различных условиях) температуру и(х, у, t) в точке (ж, у) в момент
времени t.
Пусть пластина сделана из материала, плотность которого равна S (масса в единице
объема), удельная теплоемкость равна с (на единицу массы), а коэффициент теплопроводности
равен К, причем все эти величины считаются постоянными (константами) для всей
пластины. При этих предположениях можно показать (обобщая вывод одномерного уравнения
теплопроводности, сделанный в разделе 9.5), что функция и{х, у, £), задающая
распределение температур, удовлетворяет двумерному уравнению теплопроводности
9.7. Установившаяся температура и уравнение Лапласа
867
Рис. 9.7.1. Область плоскости
R и ее граница—кривая С
Как и в разделе 9.5, к обозначает коэффициент температуропроводности материала
пластины,
к~ сё'
B)
Сумма вторых производных в правой части A) представляет собой лапласиан функции и,
обычно обозначаемый
V2u =
д2и д2и
дх2 ду2'
так что двумерное уравнение теплопроводности может быть записано в виде
C)
(Ю
Сравнивая уравнение A') с одномерным уравнением теплопроводности щ = кихх, мы
видим, что при переходе от одного до двух измерений вторая производная по переменной,
выражающей пространственную координату, — ихх — заменяется лапласианом V2u. Это
не случайность, а общее правило. Например, если гибкая натянутая мембрана занимает
в равновесии некоторую область в плоскости ху и колеблется в (перпендикулярном этой
области) направлении оси z, то функция, дающая ее смещение z = z(x, у, t), удовлетворяет
двумерному волновому уравнению
д^^ 2/д^ &z\
at2 ~а \дх2 л' ду2)
a2V2z.
D)
Это уравнение имеет такое же отношение к одномерному волновому уравнению ztt = a zxx
(здесь через z(x,y) обозначаем смещение струны), что и уравнение A0 имеет к одномерному
уравнению теплопроводности.
В этом разделе мы ограничим наше внимание установившимся процессом, в котором
температура и не изменяется со временем и потому является функцией только х и у. Таким
868 Глава 9. Методы рядов Фурье
образом, мы интересуемсяустановившейся температурой пластины. В этом случае щ = О,
так что уравнение A) становится двумерным уравнением Лапласа
^2 д2и д2и л
> V и = ТП + 7Г2" = °- &
Это важное дифференциальное уравнение в частных производных также известно как
потенциальное уравнение. Трехмерному уравнению Лапласа ихх + иуу + uzz = 0
удовлетворяют (в вакууме) электрические и гравитационные гармонические функции. Ему также
удовлетворяет скоростная гармоническая функция устойчивого безвихревого потока
несжимаемой и невязкой жидкости.
Задачи Дирихле
Частное решение уравнения Лапласа в ограниченной области плоскости R определяется
соответствующими граничными условиями. Например, вполне вероятно по физическим
соображениям считать, что установившаяся температура и(х, у) в пластине определена,
если известно, что и{х,у) совпадает с заданной функцией /(ж, у) в каждой точке граничной
кривой С пластины. Чтобы найти установившуюся температуру в пластине с заданными
граничными (краевыми) значениями, мы должны решить граничную (краевую) задачу (задачу,
в которой заданы граничные (предельные, или краевые) значения)
д2и д2и п • ,
-а"-? + "БТ = ° (внутри Я);
> дх2 ду2 * F)
и(х, у) = /(ж, у) (если (ж, у) находится на С).
Такую задачу нахождения решения уравнения Лапласа в области R с заданными граничными
(краевыми) значениями называют задачей Дирихле. Известно, что если граничная кривая
С и граничные (краевые) значения функции / ведут себя достаточно хорошо, то в такой
области существует единственное решение задачи Дирихле F).
@,Ь)
u@,y) = gl(y)
@,0)
M(*,0)=./i(x)
wm(a,b)
(a, 0) x
Рис. 9.7.2. Прямоугольная пластина с
заданными граничными (краевыми) значениями
На рис. 9.7.2 показана прямоугольная пластина с заданными граничными (краевыми)
значениями на ее четырех краях. Соответствующая задача Дирихле имеет вид
ихх + иуу = 0 (внутри Д);
и(а?,0) = /i(a;), и(х,Ь) = f2(x) @ < х < а), G)
и@,у) = gi(y), и(а, у) =д2(у) @ < у < Ь).
9.7. Установившаяся температура и уравнение Лапласа 869
Поскольку есть четыре неоднородных условия (а не, одно), эта граничная (краевая) задача
(задача, в которой заданы граничные (предельные, или краевые) значения)
непосредственно не поддается решению методом разделения переменных. В разделе 9.6, когда мы уже
сталкивались с этой трудностью, мы разбили задачу о колебаниях струны (в которой не
только начальное положение было отлично от нуля, но и начальная скорость также была
отлична от нуля) на две задачи, каждая из которых содержала только одно неоднородное
условие. Подобным способом, граничная (краевая) задача (задача, в которой заданы
граничные (предельные, или краевые) значения) G) может быть разбита на четыре задачи, каждая
из которых содержит только одно неоднородное граничное (краевое, предельное) условие.
Для каждой из этих задач функция и(х,у) будет нулевой на трех сторонах
прямоугольника и будет принимать заданные значения на четвертой. Решение каждой из этих четырех
задач на граничные (краевые) значения может быть найдено методом разделения
переменных, а сумма этих четырех решений как раз и будет решением первоначальной задачи G).
В следующем примере мы решим одну из этих четырех задач — ту, которая показана на
рис. 9.7.3.
и = 0
и = 0
Ф,Ь)
JM = o
u=f(x)
(а,0)
Рис. 9.7.3. Граничная (краевая)
задача (задача, в которой заданы
граничные (предельные, или
краевые) значения) из примера 1
Пример 1
Решим граничную (краевую) задачу (задачу, в которой заданы граничные
(предельные, или краевые) значения)
г*@, у) = и{а, у) = и(х, Ъ) = О,
u(x,0)=f(x)
для прямоугольника на рис. 9.7.3.
(8)
Решение Подставив и(х, у) = X(x)Y(y), получим X"Y + XY" = 0, так что
X" Y" _
~х-~Т~~х
(9)
для некоторой константы А. Таким образом, функция Х{х) должна
удовлетворять знакомой задаче на собственные значения
Х@) = Х(а) = 0.
870 Глава 9. Методы рядов Фурье
Собственные значения и соответствующие собственные функции имеют
вид
П27Г2 ^ , ч . П7ГХ ^ЛЧ
Лп = —j-, Хп(х) = sm A0)
для п = 1, 2, 3, Из уравнения (9) при А = п27г2/а2 и остающихся
однородных граничных условий в (8) мы получаем
2 2
К'-^-Уп = 0, Уп(Ь) = 0. A1)
Общее решение дифференциального уравнения в A1) имеет вид
чг / ч а л ПКУ „ . . П7ГУ
Yn(y) = An cosh h l?n smh ,
a a
sl из условия
__ /IX , . ruth _ . _ nnb
Yn{o) — An cosh h !?„, sinh = 0
a a
следует, что Вп = — [Лп cosh(n7rb/a)]/[sinh(n7r6/a)], так что
П7гу Лп cosh(n7rb/a) . П7гу
УпB/) = Апcosh . U/ \/ \ sinh =
a smh(n7rb/a) a
п ( . . П7ГЬ _ П7Гу , П7ГЬ . . П7И/\
- , ч smh cosh cosh smh .
гко a) \ a a a a J
sinh(n7ri
Поэтому
Yn(y) = cnsmhnn(b У\ A2)
где сп — Ап/ sinh(n7r6/a). Из A0) и A2) получаем формальное решение
в виде ряда
WKX . . П7Г(Ь — у)
71=1 71=1
i(x, у) = У2 xn(x)Yn(y) = У2 °п sin sinh —~ • A3)
Остается только выбирать коэффициенты {сп }, так чтобы удовлетворить
неоднородному условию
/ л\ V^ / . т ТЬ7ГЬ\ . П7СХ р, ч
и(х, 0) = > I cn smh ] sm = f{x).
71=1 ^ '
Для этой цели мы хотим, чтобы выполнялись равенства
. . п-кЪ . 2 Га Л/ ч . П7гх ;
cn smh = bn = - /(ж) sm a#,
a a Jo a
9.7. Установившаяся температура и уравнение Лапласа 871
откуда
2 [а пттх
с"> == —^Т7—ГГ\ /(ж)sin dx- A4)
asinh(n7r6/a) J0 a
При этом выборе коэффициентов ряд в A3) представляет собой
формальное решение в виде ряда задачи Дирихле (8). ■
Например, предположим, что
4Г0 ул 1 . ПТТХ
/(ж) = Т0 = > - sin ■
7Г ^—' n a
п нечетное
если 0 < х < а, так что Ьп = 4То/Gгп) для нечетных п и Ъп — 0 для п четных. Тогда
формулы A3) и A4) дают
( \ _ ?±о vp sin(n7rx/a) sinh(n7r[6 - у]/a)
4*,W- ^ 2^ nsinh(n7rb/a) U^
n sinh(n7rb/a)
для установившейся температуры в прямоугольной пластине, основа которой
поддерживается при температуре То, а другие три края — при нулевой температуре. В частности,
предположим, что То = 100 и что а = Ь = 10. Тогда из уравнения A5) мы находим, что
температура в центре пластины равна
/г гч 400 V^ sin(n7r/2) sinh(n7r/2)
гм5, 5) = > — ~
7Г ^—' П Sinh П7Г
п нечетное
w 25,3716 - 0,3812 + 0,0099 - 0,0003;
т. е. и(Б, 5) приблизительно равно 25,00.
Замечание 1. Можете ли вы привести аргументы (возможно, используя симметрию),
которые доказывают (не используя решение в виде ряда), что иE,5) точно равно 25?
Замечание 2. На практике инженеры используют решения, подобные приведенному
в уравнении A5), чтобы вычертить изменение температуры в пластине или части машины;
они особенно интересуются любыми "горячими точками", которые могут там появиться.
Такая информация часто выявляется с помощью вычерчивания кривых уровня, на которых
функция, задающая распределение температур и(х, у), является постоянной. На рис. 9.7.4
показан типичные кривые уровня для функции и(х, у) в A5) при а — Ь = 10 и То = 100. ■
Пример 2
Пусть R — полубесконечная лента, показанная на рис. 9.7.5. Решим
граничную (краевую) задачу (задачу, в которой заданы граничные
(предельные, или краевые) значения)
ихх + иуу = 0 (в Я);
и(х, 0) = и(х, Ь) = 0 @ < х < оо),
щх, у) ограничена при # —► +оо,
и@,у)=д(у).
872 Глава 9. Методы рядов Фурье
@, 10)
м = 0
@,0)
У
и = 0 A0, 10)
10 J
/ .^-^^ \ 1
1 /" зо %\\ > = о
и = 100 A0,0) х
Рис. 9.7.4. Типичные кривые
уровня функции и{х,у) из
уравнении A5)
@,*)
и(О,з0 = *О0
м = 0
м = 0
Рис. 9.7.5. Полубесконечная
полоса из примера 2
Решение Условие, что и(х, у) ограничена при х —► Н-оо, играет роль однородного
граничного условия, соответствующего отсутствующему правому краю
"прямоугольника"; такое условие типично для задач Дирихле для
неограниченных областей. При и(х, у) = X(x)Y(y) фактические однородные
условия дают У @) =4= Y(b) = 0. Следовательно, именно Y(у) является
решением задачи на собственные значения. Мы поэтому пишем результат
разделения переменных в (9) в виде
У ~ X ~ '
A7)
изменяя знак Л, чтобы получить знакомую задачу на собственные
значения
Y" + ЛУ = 0, У @) = У F) = 0
с собственными значениями и соответствующими собственными
функциями
лп —
П27Г2
Ь2
Уп(у) = sin
птту
A8)
Общее решение уравнения
х».
П27Г2
ь2
Хп = 0
имеет вид Хп{х) — Ап ехр(птгх/Ь) 4- Вп ехр(—птгх/Ь). Мы пишем
решение в экспоненциальной форме потому, что в этом случае условие, что
и(х,у) и, следовательно, Х(х) ограничено при х —» 4оо, немедленно
подразумевает, что Ап = 0 для всех п. Учитывая это, опускаем константу
и у нас остается только
/ П7ГХ\
Хп(х) =ехр^ —J .
A9)
9.7. Установившаяся температура и уравнение Лапласа 873
Из равенств A8) и A9) мы получаем формальное решение в виде ряда
оо оо
и(х, у) = ^2 bnXn(x)Yn(y) = ^2 Ъп ехР ( £~) sin
п=1
п=1
ппу
B0)
которое удовлетворяет однородным граничным условиям и условию
ограниченности. Чтобы также удовлетворить неоднородному условию
. п-ку
гг@, y) = ^bn sin — = д(у),
п=1
мы выбираем Ъп так, чтобы они были коэффициентами расположенного
по синусам ряда Фурье
_ 2 Гъ • . птгу
B1)
функции #(?/) на интервале [0, Ь].
Например, если
0(У) = Т0
4Т0
1 . ппу
sin--—
7Г ^—' 72 О
п нечетное
для 0 < у < Ь, то из равенств B0) и B1) следует, что
и(х,у) = — ^ -ехр(^ — Jsin
п нечетное
П7Гу
~Ъ~'
На рис. 9.7.6 показаны некоторые типичные кривые уровня функции,
задающей распределение температур, определенной этой формулой при
Ь=10иТ0 = 100. ■
@, 10)
и=100
@,0)
и = 0
A0, 10)
:Vt4V\° ■■ "" "-
И IjH : .
j I I I 550I4O 30 20
НИ!!! / <:
Wllij / / ; •■'
<10 ;5
A0,0)
м=100
Рис. 9.7.6. Типичные кривые
уровня функции и(х, у) из примера 2
874 Глава 9. Методы рядов Фурье
Задача Дирихле для кругового диска
Мы теперь исследуем установившуюся температуру (температуру в установившемся
режиме) в круговом диске радиуса а с изолированными гранями и с заданным граничным
распределением температур. Очевидно, мы должны использовать геометрию круга,
выражая и = и(г, в) через полярные координаты г и 0, с учетом соотношений х = г cos в
и у — т sin в. С помощью этих уравнений мы преобразуем лапласиан и в результате получим
уравнение Лапласа в полярных координатах:
w _2 д2и 1 ди 1 д2и л
> *U=W + t*+*W=°- B2)
Мы задаем граничные температуры (как показано на рис. 9.7.7), требуя, чтобы
> ti(M) = /@), B3)
причем функция /@), период которойравен 2п, задана. Кроме того, поскольку (г, в) и (г, 0 +
+ 27г) — полярные координаты той же самой точки, мы налагаем на и условие периодичности
> и{г,в) = и{г, в + 2тг)
для г < а всех 0; это условие играет роль однородного граничного условия.
B4)
м(Л,0)=/@)
Рис. 9.7.7. ЗадачаДирихледля
кругового диска
Чтобы решить граничную (краевую) задачу (задачу, в которой заданы граничные
(предельные, или краевые) значения), поставленную в уравнениях B2)-B4), мы подставляем
u(r, 9) = R(r)Q@) в уравнение B2); в результате получаем
R"S + -R'9 + \r&' = 0.
Деление на R@/r2 дает
А из этого следует, что
r2R" + rR' в"
R
+ -э=°-
r2R" + rR' _ в" _
R в
9.7. Установившаяся температура и уравнение Лапласа 875
для некоторой константы А. Это приводит к двум обыкновенным дифференциальным
уравнениям
r2R" + rRf - АД = 0 B5)
0" + А0 = 9. B6)
Общее решение уравнения B6) имеет вид
6@) = A cos ав + В sin ав, если А = а2 > О, B7а)
6@) = Л + В6, если А = 0, B7Ь)
6@) = Аеав + Ве~а\ если А = -а2 < 0. B7с)
Теперь мы применяем условие B4), из которого следует, что 6@) = 6@ -f 27г); т. е. что
6@) имеет период 27г. В задачах 22 и 23 мы просим вас показать, что это так, только если
А = п2 (п целое число) в B7а) или если А = 0иВ = 0в B7Ь). Таким образом, мы имеем
собственные значения и соответствующие собственные функции
А0 = 0, 6О@) = 1; B8а)
Ап = п2, 6П @) = Ап cos n0 + Bn sin n0 B8b)
для п = 1,2,3,
Затем мы обращаем наше внимание на уравнение B5). При Ао = 0 оно сводится к
уравнению r2i?Q + rR'0 = 0, общее решение которого имеет вид
ДЬ(г)=СЬ + А>1пг. B9)
Конечно, мы хотим, чтобы функция и(г, 0) и, следовательно, R(r), была непрерывна в г = 0;
из этого следует, что Do = 0 в уравнении B9), так что До (г) = Со. Тогда при А = Ап = п2
уравнение B5) принимает вид
r2R'^ + rR'n - n2Rn = 0.
Подставляя пробное решение R(r) = rfc, мы находим, что к = ±п9 так что общее решение
предыдущего уравнения имеет вид
Rn(r) = Cnrn + ^.- C0)
Из непрерывности в г = 0 тогда следует, что Dn = 0, так что Rn(r) = Спгп.
Наконец мы комбинируем (объединяем) результаты в уравнениях B8)-C0) и с учетом
равенства Dn = 0 получаем формальное решение в виде ряда вида
6о
и(г,в) = ^2Яп(г)еп(в);
п=0
иными словами,
оо
>► и(г, в) = ^ + У] (с cos n0 + Ьп sin n^)rn. C1)
2 n=i
876 Глава 9. Методы рядов Фурье
Чтобы удовлетворить граничному условию и(а, в) = /(#), мы хотим, чтобы
оо
гл(а, в) = — + У^(апап совпв + Ъпап sinnO)
2 n=i
был рядом Фурье функции /(#) на интервале [0,2тг]. Следовательно, мы полагаем
1 Г27Г
> ап = f(9)cosned0 (п = 0,1,2,... ) C2а)
тгап J0
1 Г27Г
Ьп = /(в) smndde (п = 1,2,3,... ). C2b)
тгап Jo
и
Пример 3
Например, если F(Q) = Т0 для 0 < в < 7г и F@) = -Г0 для 7г < 0 < 2тг,
так что
m = Af £ ^
п нечетное
то ап = О для всех п^. 09Ьп = 0 для п четных и Ьп = 4То/Gгпап) для п
нечетных. Так что из равенств C1) и C2) следует, что
и(г.в) = > sin гш. ■
п нечетное
Предупреждение. В задачах Дирихле из этого раздела мы сконцентрировали
внимание на температурных функциях с заданными граничными (краевыми) значениями. В случае
пластины с изолированным краем, через который теплота течь не может, граничное
(краевое, предельное) условие состоит в том, что производная функции и(х, у) по нормали (по
перпендикулярному направлению) к этому краю обращается в нуль. Рассмотрим, например,
прямоугольную пластину на рис. 9.7.2. Если край х — 0 изолирован, то их@, у) = 0, тогда
как если изолирован край у = Ь, то иу (х, Ь) = 0.
М^ШЁЖ.
В задачах 1-3 решите задачу Дирихле для прямоугольника 0<х<а, 0<у<Ь, состоящую из
уравнения Лапласа ихх + иуу = 0 и данных условий на граничные (краевые) значения.
1. и(х,0) = и{х,Ъ) = и@,у) = 0, и(а,у) = g(y)
2. и(х,0) = и(х,Ь) = и(а,у) = 0, и@,у) = д(у)
3: и(х, 0) = гл@, у) = и(а, у) = 0, и(х, Ь) = f(x)
4. Рассмотрим граничную (краевую) задачу (задачу, в которой заданы граничные (предельные,
или краевые) значения)
^хх г У'уу ~~ U5
их @, у) = 1АХ (а, ?/) = г* (ж, 0) = 0,
и(х,Ъ) = /(#),
9.7. Установившаяся температура и уравнение Лапласа 877
соответствующую прямоугольной пластине 0<ж<а, 0<у<'6у которой изолированы
стороны х = 0 и х = а. Получите решение
/ ч аоу \-^ ( П7гх\ /sinh(п7гу/а)\
26 *-^ \ а ) \ sinh(n7r6/a))
где
ап = - f(x) cos da? (n = 0, 1,2,... ).
a Jo a
(Указание. Сначала покажите, что Ао является собственным значением, причем Хо{х) = 1
и УоЫ = У-)
Л задачах 5 и 6 найдите то решение уравнения Лапласа ихх+иуу = 0 в прямоугольнике 0 < х < а,
О < у < Ь, которое удовлетворяет заданным граничным условиям (см. задачу 4).
5. %(ж,0) = иу(х,Ь) = и(а,у) = 0, и@,у) = g(y)
6. их @, у) = глх (а, ?/) = % (ж, 0) = 0, и(х, b) = f(x)
В задачах 7 и 8 найдите то решение уравнения Лапласа в полубесконечной ленте 0 < х < а, у > 0,
которое удовлетворяет данным граничным условиям и дополнительному условию: функция и(х, у)
ограничена при у —► +оо.
7. м@, у) = м(а, у) = 0, м(ж, 0) = f(x) 8. г*х @, у) = г*х (а, у) = 0, и(х, 0) = f(x)
9. Предположим, что а = 10 и f(x) = 10ж в задаче 8. Покажите, что
400 v-^ ! -П7Г1//10 ^тпе
М(жJ/) = 50-— £ ^е
10
п нечетное
Затем вычислите (с точностью до двух десятичных знаков) значения гл@, 5), г*E, 5) и ^/A0, 5).
10. Край х = а прямоугольной пластины 0<х<а, 0<у<Ь изолирован, а на краях х — 0 и у =
= 0 поддерживается нулевая температура, причем и(х, Ъ) = f{x). Используйте расположенный
по синусам ряд нечетного продолжения функции из задачи 21 из раздела 9.3 и получите решение
в форме
и(х,у) = 2^ с"sin -TyT smh ~2^~*
п нечетное
Затем найдите формулу для сп.
11. Край у = 0 прямоугольной пластины 0<х<а,0<у<Ь изолирован, а на краях х = а и у = Ь
поддерживается нулевая температура, причем и@,у) = g(y). Используйте расположенный по
косинусам ряд нечетного продолжения функции из задачи 22 из раздела 9.3 и найдите и(х,у).
12. Вертикальное поперечное сечение длинной высокой стены толщиной 30 см имеет форму
полубесконечной ленты 0 < х < 30, у > 0. На краю х = 0 поддерживается нулевая температура,
но край х = 30 изолирован. При условии и(х, 0) = 25, получите формулу
7Г ^—' П
п нечетное
П7ГХ
"бО"
для установившейся температуры внутри стены.
В задачах 13-15 рассматривается полукруглая пластина радиуса а, показанная на рис. 9.7.8.
Круговой край имеет заданную температуру и(а,0) = /(#)• В каждой задаче получите данный ряд
для установившейся температуры и(г, в), удовлетворяющей данным граничным условиям вдоль
в = 0 и в = 7г, и, кроме того, найдите формулу для коэффициентов сп.
878 Глава 9. Методы рядов Фурье
и=№
Рис. 9.7.8. Полукруглая пластина из
задач 13-15
13. и(г, 0) = и(г, 7г) = 0;
14. ио(г,0) = ив(г,тт) = 0;
и(г, 0) = Y^ cnrn sin п#
п=1
u(r, 0) = ~ + Y; cnrn cos п(9
15. и(г, 0) = ие(г,7г) = 0;
П0
*(r,0) = ]Г Cnr"/2sin^
п нечетное
16. Рассмотрим задачу Дирихле для множества внешних точек круга г — а. Вам нужно найти
решение уравнения
r2Urr + riAr + 1Л00 = 0,
такое что и(а, 0) = /@) и гл(г, 0) ограничена при г —* +оо. Получите ряд
1а(г, 0) = — + Y", — (fln cos n0 -Ь 6n sin п0),
п=1
и найдите формулы для коэффициентов {ап} и {6П}.
17. Скоростная гармоническая функция u(r, 0) для устойчивого потока идеальной жидкости вокруг
цилиндра радиуса г = а является решением граничной (краевой) задачи (задачи, в которой
заданы граничные (предельные, или краевые) значения)
r2urr -Ь rur + иве = 0 (г > а);
иг (а, 0) = 0, ti(r, 0) = и(г, —0),
lim [м(г, 0) - U0r cos 0] = 0.
г—юо
(a) Разделяя переменные, получите решение
<x(r,0) = ^(r2 + a2)cos0.
г
(b) Воспользовавшись полученным результатом, покажите, что компоненты скорости потока
равны
ди С/0 2 2 олч
гхх = тг~ = ""о" (г "~ а cos 20)
аж г2 , ,
и
#11 С/о 2 • лд
у ду г2
Линии обтекания для этого потока жидкости вокруг цилиндра показаны на рис. 9.7.9.
9.7. Установившаяся температура и уравнение Лапласа 879
Рис. 9.7.9. Линии обтекания для
потока идеальной жидкости вокруг
цилиндра »
Комментарий. Линии тока на рис. 9.7.9 представляют собой кривые уровня функции ф(х,у),
заданной в части (Ь) задачи 18. Неприятно писать компьютерную программу, которая позволяет
вычертить такие кривые уровня. Гораздо проще вычертить некоторые решения
дифференциального уравнения dy/dx = иу/их. Мы сделали так для начальных условий хо = —5, у о = —2,7, —2,5,
—2,3, ..., 2,5, 2,7. Решения были получены численными методами: мы использовали
усовершенствованный метод Эйлера (раздел 2.5) с величиной шага 0,02.
18. (а) Покажите, что потенциал скорости в части (а) задачи 17 может быть записан в
прямоугольных координатах в виде
ф,у) = иохA + 1^У
(Ь) Функция тока для потока имеет вид
1>(х,у) = U0y
(-£--1).
Покажите, что Vw • V^ = 0. Поскольку v = Vu представляет собой вектор скорости, из этого
видно, что линии тока потока являются кривыми уровня функции ф(х,у).
В задачах 19-21 рассматривается твердый сферический шар радиуса г = а повсюду нагретый до
начальной температуры То. В момент времени t = 0 его упаковывают в лед, так что после этого
температура на его поверхности при г — а является нулевой. Его температура тогда зависит
только от времени t и расстояния г от центра шара, так что мы пишем и = u(r, t).
19. (а) Количество теплоты в сферической оболочке с внутренним радиусом г и внешним радиусом
г + Аг выражается формулой
Q(t) = |
г+Дг
c6u(x, t) • 4tts ds.
Покажите, что Q'(t) — 47rcdr2ut(r, t) для некоторого г в интервале (г, г + Аг). (Ь)
Радиальный поток теплоты через ограничивающие сферические поверхности-оболочки, рассмотренные
в части (а), равен ф = —Киг. Выведите, что
Ql{t) = ЬпК [(г + ArJur(r + Ar, t) - r2ur(r, t)] .
880 Глава 9. Методы рядов Фурье
(c) Приравняйте значения Q'(t) полученные в частях (а) и (Ь); затем возьмите предел при
Аг —> 0 и получите уравнение
ди _ к д ( 2дгЛ
dt г2 дг \ дг) '
(d) Наконец, покажите, что это последнее уравнение эквивалентно
-(ru) = k—(ru).
20. Из части (d) задачи 19 следует, что u(r,t) является решением граничной (краевой) задачи
(задачи, в которой заданы граничные (предельные, или краевые) значения)
— (ги) = к Q^{ru) (г < а);
ЦМ) = 0, и(г,0)=То.
Покажите, что новая функция v(r,t) = ru(r,t) является решением знакомой (рассмотренной
в разделе 9.5) граничной (краевой) задачи (задачи, в которой заданы граничные (предельные,
или краевые) значения), и таким образом получите решение
, ЛЛ 2аТ0 ^ (-l)n+1 / п2тг2Ы\ . птгг
ЩГ, t) = > ^ ехр — sin .
7Г ^—{ пг \ а2 ) а
21. (а) Рассмотрите решение задачи 20 и выведите из него, что температура в центре шара в момент
времени t равна
оо / 2 2ji\
П=1 ^ '
(b) Пусть а = 30 см и То = 100° С. Вычислите г*@, t) через 15 минут, если шар сделан из
железа, для которого к = 0,15 в единицах системы сантиметр-грамм-секунда (т.е. в системе
СГС). (Ответ. Приблизительно 45° С.) (с) Если вы имеете доступ к программируемому
калькулятору, повторно решите часть (Ь) для шара, сделанного из бетона, для которого к = 0,005
в единицах системы сантиметр-грамм-секунда (т. е. в системе СГС). Понадобится вычислить
приблизительно 15 членов, чтобы показать, что и = 100,00° С с точностью до двух десятичных
знаков после запятой.
22. В этом разделе при обсуждении задачи Дирихле для кругового диска мы получили
обыкновенное дифференциальное уравнение О" 4- АО = 0 с условием периодичности О@) = в@ 4- 27г).
(а) Предположим, что Л = а2 > 0. Покажите, что общее решение
имеет период 27г, только если Л = п2, где п — целое число. (Ь) В случае Л = 0 покажите, что
в(в) = А cos ав 4- В sin ав
-, только если Л
общее решение
0@) = Ав 4- В
является периодическим только если А = 0.
23. Если в задаче 22 Л = —а2 < 0, то общее решение дифференциального уравнения из этой
задачи имеет вид
0@) = Аеав + Ве-ав.
Покажите, что эта функция не является периодической, если неверно, что А = В = 0.
ГЛАВА
Собственные
значения и краевые
(граничные) задачи
10.1. Задачи Штурма-Лиувилля и разложения
по собственным функциям
В
последних трех разделах главы 9 мы видели, что многочисленные различные
граничные (краевые) задачи (задачи, в которых заданы граничные (предельные, или краевые)
значения) всегда приводят — методом разделения переменных — к одному и тому же самому
обыкновенному дифференциальному уравнению
> Х"(х) + ХХ{х) = 0 @ < х < L), A)
содержащему собственное значение Л, но с различными условиями в конечных точках»
например
Х@) = X(L) = 0, B)
ЛГ'(О) = X'(L) = 0, C)
или
Х@) = X'(L) = 0 D)
в зависимости от первоначальных граничных условий.
Например, вспомните задачу (из раздела 9.5), в которой требовалось найти
распределение температур и(х, t) в стержне 0 S % S L ПРИ заданной начальной температуре и(х, 0) =
= f(x). Как граничная (краевая) задача (задача, в которой заданы граничные (предельные,
или краевые) значения), эта задача для стержня — та же самая, что и задача Вычисления
или
882 Глава 10. Собственные значения и краевые (граничные) задачи
температуры в большой плите, которая занимает область 0 ^ х ^ L в пространстве xyz.
Если начальная температура стержня зависит только от а: и не зависит от у и г, то,
принимая условие и(х, 0) = /(#), мы знаем, что то же самое будет истинно и для температуры
и = и(х, t) стержня в момент времени t. Подставив
u(x,t) = X(x)T(t)
в уравнение теплопроводности
ди _ д2и
It " Ж*'
мы найдем, что X (х) удовлетворяет условиям в конечных точках B), если на сторонах х = 0
и х = L плиты поддерживается нулевая температура, если же обе стороны изолированы, то
выполняются условия C), ну а если одна строна изолирована, а на другой поддерживается
нулевая температура, то выполняются условия D). Но если через каждую сторону теплота
рассеивается в окружающую среду (в которой поддерживается нулевая температура), то
в соответствии с законом охлаждения Ньютона (согласно задаче 23 из раздела 9.5) условия
в конечных точках принимают форму
hX@) - Х'@) = 0 = hX{L) + X'{L), E)
где h — неотрицательный коэффициент теплопередачи.
Дело в том, что, когда мы налагаем различные условия в конечных точках на решение
уравнения A), мы получаем различные задачи на собственные значения, и, следовательно,
различныесобственныезначения{Ап}иразличныесобственныефункции{Хп(х)},которые
используются в построении решения в виде формального степенного ряда
u(x9t)^^2cnXn(x)Tn(t) F)
для граничной (краевой) задачи (задачи, в которой заданы граничные (предельные, или
краевые) значения). Заключительный шаг в этом построении состоит в том, чтобы выбрать
коэффициент {сп} в уравнении F) так, чтобы
и(х,0) = ^2спТп@)Хп(х) = f(x). G)
Таким образом, нам нужно, наконец, разложить по собственным функциям заданную
функцию f(x). Иными словами, нужно заданную функцию f(x) выразить (в виде ряда)
через собственные функций подходящей граничной (краевой) задачи (задачи, в которой
заданы граничные (предельные, или краевые) значения).
Задачи Штурма-Лиувилля
Чтобы унифицировать и обобщить метод разделения переменных, полезно сформулировать
задачу на собственные значения общего вида, которая включает как частные случаи каждый
из ранее упомянутых случаев. Уравнение A) с у вместо X в качестве зависимой переменной
может быть записано в форме
А.
dx
*>£
- q(x)y + Xr(x)y = 0, (8)
40.1. Задачи Штурма-Лиувилля и разложения
883
где р{х) = г (х) = 1 и q(x) = 0. Действительно, в задаче 16 мы показываем, что по существу
любое линейное дифференциальное уравнение второго порядка вида
А(х)у" + В(х)у' + С(х)у + XD(x)y = 0
принимает вид (8) после умножения на подходящий множитель.
Пример 1
Если мы умножим параметрическое уравнение Бесселя
х2у" + ху' + (Ах2 - п2)у = 0 (х > 0)
порядка п на 1/х, результат можно записать в виде уравнения
dy]
dx
dx
у + Хху == 0,
а;
которое имеет форму (8) при р(х) = r(x) = xnq(x) = n2/x. ■
Теперь давайте на решения уравнения (8) в ограниченном открытом интервале (а, Ь)
наложим однородные [линейные] условия в конечных точках в виде равенств
<*гу(а) - а2у,(а) = 0, ргу(Ь) + C2у\Ь) = 0,
(9)
где коэффициенты ai, 0:2, /3i и /З2 — константы. В дополнение к тому, что эти два условия
однородны, они также отделены в том смысле, что одно из них содержит значения у(х)
и у' (х) в одной конечной точке х = а, тогда как другое содержит значения в другой конечной
точке х = Ь. Например, обратите внимание, что условия у(а) = у'{Ь) = 0 имеют форму (9)
при а\ = fa = 1 и сиг = 0г = 0.
Определение. Задача Штурма-Лиувилля
Задача Штурма-Лиувилля является задачей на значения в конечных точках вида
d_
dx
Р^х)Тх
— q(x)y + Xr(x)y = 0 (a < x < b);
aiy(a) - a2y'(a) = 0, fay{b) + j37y'(b) = 0,
(8)
(9)
причем одновременно не могут быть нулями ни оба числа а\ и«2, ни оба числа 0\
и 02, т. е. в каждой паре (а\, аг) и @и 02) хотя бы одно число должно быть отлично от
нуля. Параметр А в (8) как раз и есть "собственное значение", возможные (постоянные)
значения которого разыскиваются.
Задачи Штурма-Лиувилля обобщают задачи на значения в конечных точках из
раздела 3.8, решениями которыхявляются косинусы и синусы. Они названы по имени французских
математиков Жака Шарля Франсуа Штурма A803-1855) и Жозефа Лиувилля A809-1882),
которые исследовали такие задачи в 1830-х годах.
884 Глава 10. Собственные значения и краевые (граничные) задачи
Пример 2
Мы получим различные задачи Штурма-Лиувилля, если для того же
самого дифференциального уравнения
у" + Ау = 0
(для 0 < х < L)
е условия в конечных точ
А =
= А
■02
= 1 и е*2 =
= ОИО!2
= 1 И «2 =
= /% =
= /?2 =
= /3i =
0),
= 1),
0).
• 2/@) = y(i) = 0 (где ах =
• 2/,@) = 2/,(^) = 0(гдеа1
• у@)=у'(Ь) = 0(тдеа1--
Обратите внимание, что задача Штурма-Лиувилля в (8)-(9) всегда имеет нулевое
решение у(х) = 0. Мы ищем значения Л — собственные значения, — при которых эта задача
имеет нетривиальное действительное решение (собственную функцию), и для каждого
собственного значения — соответствующую ему собственную функцию (или собственные
функции). Обратите внимание, что любая функция, равная произведению отличного от нуля
числа на собственную функцию, также будет собственной функцией. Следующая теорема
указывает достаточные условия, при выполнении которых задача (8)-(9) имеет бесконечную
последовательность {An}f° неотрицательных собственных значений, причем для каждого
собственного значения Лп имеется (с точностью до постоянного числового множителя)
точно одна соответствующая ему собственная функция уп(х). Доказательство этой теоремы
приведено в главе 9 книги Г. П. Толстова, посвященной рядам Фурье (G. P. Tolstov, Fourier
Series (New York: Dover, 1976)I.
Теорема 1
Собственные значения задачи Штурма-Лиувилля
Предположим, что функции р(х) , р' (ж j, g (ж) и г (ж) в уравнении (8) непрерывны на интервале
[а, 6],причемр(ж) > 0иг(ж) > 0 в каждой точке интервала [а, Ь]. Тогда собственные значения
задачи Штурма-Лиувилля (8)-(9) составляют возрастающую последовательность
Ai < А2 < Аз < • • • < An^i < Хп < - • • A0)
вещественных чисел, причем
lim An = -Ьоо. A1)
п—+оо
С точностью до постоянного множителя только одна (т. е. единственная с точностью до
постоянного множителя) собственная функция уп (х) связана с каждым собственным
значением Ап. Кроме того, если q(x) ^ 0 на интервале [а, Ь] и все коэффициенты аь а2, Pi и /32
в (9) неотрицательны, то и все собственные значения неотрицательны. ▲
Предупреждение, Важно соблюдать знаки в (8) и (9) при проверке условий теоремы 1.
Иногда задачу Штурма-Лиувилля в (8)-{9) называют регулярной, если она удовлетворяет
условиям теоремы 1; в противном случае ее называют особой (сингулярной). В этом разделе
мы ограничим наше внимание регулярной задачей Штурма-Лиувилля. Особые
(сингулярные) задачи Штурма-Лиувилля, связанные с уравнением Бесселя, появятся в разделе 10.4.
1 Русский оригинал: Толстое Г. П. Ряды Фурье. 2-е изд., М., 1960. — Примеч. ред.
10.1. Задачи Штурма-Лиувилля и разложения... 885
Пример 3
В примере 3 из раздела 3.8 мы видели, что задача Штурма-Лиувилля
y" + \y = 0 @<x<L);
г/@) = 0, y(L) = О
A2)
имеет собственные значения Ап = п2тг2/Ь2 и соответствующие
собственные функции уп (х) = sin(n7rx/L) (п = 1,2,3,...). Там мы должны
были отдельно рассмотреть случаи А = — а2 <0, А = 0 и А = а2 >0.
Здесь р(х) = г(х) = 1, q(x) = 0, ot\ = C\ — 1 и аг = /?2 = 0, так что
мы знаем из теоремы 1, что задача A2) имеет только неотрицательные
собственные значения. Поэтому нам пришлось бы рассмотреть только
два случая А = 0 и А = а2 > 0, если бы мы хотели решить эту задачу
заново. ■
Мы также знакомы (из задач в разделе 9.5) с задачей Штурма-Лиувилля
у" + \у = о
у'(о) = о,
@ < х < L);
У\Ц = 0,
A3)
которая имеет собственные значения Ао = 0, Ап = п2/к2 /L2 (п = 1,2,3,...) и
соответствующие им собственные функции уо(х) = 1, уп{х) = cos(n7rx/L). Мы будем обычно писать
Ао = 0, если 0 является собственным значением, а в противном случае наименьшее
собственное значение обозначаем через Аь таким образом, Ai всегда обозначает наименьшее
положительное собственное значение.
Пример 4
Найдем собственные значения и соответствующие им собственные
функции задачи Штурма-Лиувилля
у" + \у = 0
2/@) = 0,
@ < х < L);
y(L) = 0.
A4)
Решение Эта задача Штурма-Лиувилля удовлетворяет условиям теоремы 1 при
oti — fc = Оиаг = /3i = 1, так что никаких отрицательных собственных
значений нет. Если А = 0, то у (х) = Ах + В, и, таким образом, у'@) =
= А = 0иу(Ь) = В = 0. Поэтому 0 не является собственным значением.
Если А = а2, то
у(х) = A cos ах + В sin ах и у'{х) = — Аа sin ах + Ва cos ax.
Так что из г/@) = 0 следует, что В = 0, а из этого следует, что y(L) =
= A cos ah = 0, а затем — что aL —нечетное кратное 7r/2:aL = Bп —
— 1Oг/2. Таким образом, мы нашли собственные значения и
соответствующие собственные функции:
Ап — ап —
дляп = 1,2,3,
Bп-1Jтг2 , ч Bп-1)тгх
и Уп\х) = cos
4L2
2L
886 Глава 10. Собственные значения и краевые (граничные) задачи
Найдем собственные значения и соответствующие собственные функции
задачи Штурма-Лиувилля
y" + Xy = 0 @<x<L);
у@) = 0, hy(L) + y'(L) = 0 (h>0).
A5)
Решение Эта задача удовлетворяет условиям теоремы 1 npnai = fa — l,a2 = 0
и /3i = h > 0, так что никаких отрицательных собственных значений нет.
Если Л = 0, то у{х) = Ах + В; таким образом, у@) = В = 0. Тогда
hy(L) + y'(L) = ft • AL + A = A • (hL + 1) = 0,
а из этого следует, что также иА = 0. Таким образом, 0 не является
собственным значением.
Если Л = а2, то
у (х) = A cos ax + В sin ax.
Следовательно, у @) = А = 0, так что
'у (ж) = Bsinax и у7 (ж) = Bacosax.
Поэтому
hy(L) + у;(Ь) = hB sin al/ + £?a cos ah = 0.
Если В ф 0, то
Таким образом, /3 = aL — [положительное] решение (корень) уравнения
tgx = --£-. A7)
Решения уравнения A7) — это точки пересечения графиков у{х) — —
— tg х и у (х) = x/hL, как показано на рис. 10.1.1. Из рисунка очевидно,
что существует бесконечная последовательность положительных корней
/?ь #2> Рз, • • • и что при достаточно большом п /Зп только немного
больше, чем Bп — 1Oг/2. В таблице на рис. 10.1.2 приведены первые восемь
решений уравнения A7) для случая hL = 1. Во всяком случае,
собственные значения и соответствующие им собственные функции задачи A5)
выражаются формулами
ft
РпХ
A8)
An = a2 = ^|, уп(х) = sinanz = sin ^-
для п = 1,2, 3, Уравнение A7) появляется довольно часто в
некоторых приложениях (механические колебания и задачи теплопроводности—
только два из многих примеров), и его решения для различных значений
hL сведены в таблицу 4.19 знаменитого справочника (издания 1965 года)
по специальным функциям М. Абрамовича и И. Стиган (Abramowitz and
Stegun, Handbook of Mathematical Functions (New York: Dover, 1965)). ■
10.1. Задачи Штурма-Лиувилля и разложения ...
887
Рис. 10.1.1. Решение уравнения A7)
геометрическими методами
#tfi'
1
2
3
4
5
6
7
8
i -v^y.«v-:
2,0288
4,9132
7,9787
11,0855
14,2074
17,3364
20,4692
23,6043
'-VBu^-t)#/?
1,5708
4,7124
7,8540
10,9956
14,1372
17,2788
20,4204
23,5619
Рис. 10Л.2. Приближенные
значения первых восьми
положительных решений уравнения tg х = —х
Ортогональные собственные функции
В разделе 9.1 мы установили, что знакомые формулы для коэффициентов в ряде Фурье
следуют из ортогональности функций косинус и синус. Точно так же разложение заданной
функции в ряд по собственным функциям задачи Штурма-Лиувилля зависит от
критически важного свойства ортогональности этих собственных функций. Функции ф{х) и ф(х)
называются ортогональными на интервале [а, Ь] относительно весовой функции г (ж),
если
[ Ф(хШ
Ja
x)r{x) dx = 0.
A9)
Следующая теорема подразумевает, что любые две собственные функции регулярной
задачи Штурма-Лиувилля, которые соответствуют различным собственным значениям,
ортогональны относительно весовой функции г(х) в уравнении (8).
Теорема 2
Ортогональность собственных функций
Предположим, что функции р, q и г в задаче Штурма-Лиувилля в равенствах (8)-(9)
удовлетворяют условиям теоремы 1 и пусть у^ (х) и 2/j (ж)—собственные функции, соответсвующие
различным собственным значениям А* и А^. Тогда
yi(x)yj(x)r(x)dx = 0.
Доказательство. Мы начинаем с уравнений
д(ж)г/г + ^ir(x)yi = 0,
B0)
^dx"
р(х)
dx
B1)
- q{x)yj + Xjr(x)yj = 0.
38а Глава 10, Собственные значения и краевые (граничные) задачи
риз этих уравнений следует, что Л^, yi и Aj5 yj — пары, состоящие из собственного значения
и собственной функции. Если мы умножим первое уравнение на у3;, а второе на yi, а затем
вычтем результаты, мы получим
d
У>Тх
( чФг
d I
-yiTx\
»«f]
+ (a, - a,-:
)г{х)УгУз
Следовательно,
(Xi - Xj)yiyjr(x) = yi~^
d
dx
/ \dyj
p{x)!x-_
\p(x) (yi
d
-y*Tx
<% dyt
dx Vj dx
р{хIь
)]
?
последнее из этих двух равенств поддается проверке прямым дифференцированием.
Поэтому интегрирование от х = а до х = 6 дает
(Л* - Xj) yi(x)yj(x)r(x) dx = [р(х) {yi{x)y'j{x) - yj(x)y'i(x))^. B2)
Из условий в конечных точках (9) мы имеем
<х\у%(а) - а2у[{а) = 0 и ац/Да) - а2у](а) = 0.
Поскольку «1 и с*2 не являются оба нулевыми, т. е. хотя бы одно из них отлично от нуля, то
из этого следует, что детерминант, составленный из коэффициентов, должен быть нулевым:
yi(a)yfj(a) - yj{a)y'i{a) = 0.
Точно так же из второго условия в конечных точках в (9) следует, что
yi(b)y'j(b)-yj(b)y'i(b) = 0.
Таким образом, правая часть в уравнении B2) обращается в нуль. Поскольку Л^ Ф Xj, отсюда
следует результат B0) и доказательство закончено. А
Разложения по собственным функциям
Теперь предположим, что функция f(x) может быть представлена в интервале [а, 6] рядом
по собственным функциям
f(x) = Y1 с™У™(х),
B3)
m—l
где функции yi, у2, уз, • • • — собственные функции регулярной задачи Штурма-Лиувилля
в уравнениях (8)-(9). Чтобы определить коэффициенты а, с2, с$,..., мы обобщим метод,
с помощью которого мы определили обыкновенные коэффициенты Фурье в разделе 9.1.
Сначала мы умножаем каждую часть уравнения B3) на уп(х)г(х), а затем интегрируем от
10.1. Задачи Штурма-Лиувилля и разложения ... 889
х = а до х = Ъ. Согласно предположению о допустимости почленного интегрирования, мы
получаем
f(x)yn(x)r(x)dx =^2cm\ ym(x)yn(x)r(x)dx. B4)
Ja m=l Ja
Однако из-за ортогональности, выраженной равенством B0), в правой части в равенстве B4)
остается только один отличный от нуля член — тот, для которого т = п. Таким образом,
равенство B4) принимает вид
гЬ гЬ
f(x)yn(x)r(x)dx = cn\ [yn(x)]2r(x)dx,
Ja Ja
и поэтому
f(x)yn(x)r(x)dx
> сп = ^ . B5)
[Уп(х)]2 r{x) dx
Ja
Мы поэтому определяем ряд по собственным функциям B3), выражающий f(x) через
собственные функции данной задачи Штурма-Лиувилля, выбирая коэффициенты так, как
указано в равенстве B5).
Предположим, например, что задача Штурма-Лиувилля имеет знакомый вид
у" + Ау = 0 @<я<тг);
у@) = у(тг) = 0,
для которого г{х) = 1, а собственные функции равны уп{х) — sinna; для п = 1, 2, 3,
Тогда уравнение B5) дает
f(x) sin nxdx n
сп = -^-р = - /0*0 sinnxdx,
sin2 nx dx °
Jo
потому что
7Г
JO
sin2 x dx
Это — знакомая формула для коэффициентов расположенного по синусам ряда Фурье, так
что ряд по собственным функциям в B3) — это просто уже знакомый нам расположенный по
синусам ряд Фурье
сю
f{x) = V^ cn sin nx
n=l
функции / (x) на интервале [0, 7г].
Следующая теорема, сформулированная без доказательства, обобщает теорему
сходимости ряда Фурье из раздела 9.2.
890
Глава 10. Собственные значения и краевые (граничные) задачи
Теорема 3
Сходимость ряда по собственным функциям
Пусть 2/i, у2, уз, • • • — собственные функции регулярной задачи Штурма-Лиувилля на
интервале [а, Ь]. Если функция / (х) кусочно гладка на интервале [а, Ь], то ряд по собственным
функциям в равенстве B3) сходится для а < х < Ъ к значению f{x) везде, где / непрерывна,
и к среднему арифметическому^ [f(x+) + /(#—)] правого и левого пределов в каждой точке
разрыва. А
Пример 6
Для задачи Штурма-Лиувилля у" + Ху = 0 @ < х < L), у'@) = y(L) =
= 0 из примера 4 мы нашли собственные функции уп(х) = cosBn —
— 1Oгх/BЬ), п = 1, 2, 3, Соответствующий ряд по собственным
функциям для функции f(x) имеет вид
ч V^ BП - 1)тГХ
/И = }^Сп cos 2L '
B7)
71=1
причем
/(ж) cos ([2n - 1]ttx/2L) cte
_ Jo
cos2([2n- 1]ttx/2L) dx
Jo
- /(x) cos
Bn ~ 1OПЕ
потому что
COS
2L
2 (£n — 1OГХ
dx,
B8)
dx = —-.
2
Jo - 2L
Таким образом, ряд в равенстве B7) представляет собой расположенный
по косинусам ряд нечетного продолжения функции, который был
определен в задаче 22 из раздела 9.3. Точно так же задача Штурма-Лиувилля
у" + Ху = 0,2/@) = у'{Ь) = 0 приводит к расположенному по синусам
ряду
f(x) = ^2Сп sin
71=1
Bп — 1OГХ
2L '
■Г/(*)
Jo
. Bп — 1OГХ
sm' 2L dx
B9)
нечетного продолжения функции (ряд такого типа был определен в
задаче 21 из раздела 9.3). ■
Пример 7
Представим функцию f(x) = А (константа) для 0 < х < 1 в виде ряда по
собственным функциям задачи Штурма-Лиувилля
у" + Ху = 0 @ < х < 1);
г/@) = 0, 2/A) + 2у'A) = 0.
C0)
10.1. Задачи Штурма-Лиувилля и разложения ... 891
Решение Сравнивая C0) с A5), мы видим, что это задача Штурма-Лиувилля из
примера 5 при!/ = lnh = |. Поэтому из A7) и A8) следует, что
собственными функциями данной задачи являются функции уп (х) = sin /3nx, где
0и /?2> 0з, • • • — положительные корни уравнения tg x = —2х±
Следовательно, коэффициенты в искомом ряде выражаются формулой
A sin /ЗпХ dx
Си = 4 : • C1)
sin2 Cnx dx
Jo
Теперь A sin Cnx dx = АA — cos /3n)//3n и
Jo
Г1 Г1 1 1 Г 1
sin2 /Зпя dx = - A — cos 2/3nx) dx = - \х — —— sin 2/3nx
Jo Jo 2 2 L 2pn
1 / sin/?ncos/3n\
2 V Ai У
Следовательно,
sin2 /?лж cfo = - (l + 2 cos2 Cn) .
!
1 l
На последнем шаге мы использовали то, что из уравнения A7) следует,
что (sin/3n)//3n = — 2cos/3n. Подставляя эти значения для интегралов
в C1), мы получаем ряд по собственным функциям
л/ ч v^ 2A(l — cos3n) . . ,„ЛЧ
/H = E^^d^)sin^- C2)
Замечание. Основные этапы исследования ряда по собственным функциям в
равенстве C2) численными методами выделены в вычислительном проекте для этого раздела. ■
Резюме
Согласно теоремам этого раздела каждая регулярная задача Штурма-Лиувилля имеет
следующие три свойства.
• Она имеет бесконечную последовательность собственных значений, расходящихся к
бесконечности (теорема 1).
• Собственные функции ортогональны при соответствующем выборе весовой функции
(теорема 2).
• Любая кусочно гладкая функция может быть представлена рядом по собственным
функциям (теорема 3).
892 Глава 10. Собственные значения и краевые (граничные) задачи
В прикладной математике, есть и другие типы задач на собственные значения, которые также
обладают этими тремя важными свойствами. Некоторые изолированные примеры появятся
в последующих разделах, хотя мы ограничим наше внимание в значительной степени именно
приложениями задач Штурма-Лиувилля.
10 Л, Задачи
В задачах к разделу 3.8 важную роль играют собственные значения и собственные функции и
потому их можно использовать также и здесь. В задачах 1-5 проверьте, что собственные значения
и собственные функции указанной задачи Штурма-Лиувилля равны указанным.
1. у" + Ху = 0, у'@) - y(L) = 0; Ло = 0, у0(х) = 1 и Лп = n27r2/L2, уп(х) = cosn7rx/L
2. у" + Ху = 0, у@) = y'(L) = 0; Лп = Bга - 1Jtt2/4L2, уп(х) = sinBn - l)irx/2L, га ^ 1
3. у" + Ху = 0, у'@) = hy(L) + y'{L) = 0 (h > 0); Лп = Pl/L2, yn(x) = cosCnx/L (n ^ 1), где
/3n — n-й положительный корень уравнения tg x = hL/x. Вычертите эскизы графиков функций
у = tg х и у = hL/x, чтобы оценить значение /Зп для больших п.
4. у" + Ху = 0, Лу@) - у'@) = уЩ = 0 (h > 0); ЛП = (%/L2, yn(x) = Cncospnx/L +
+ hL sin finx/L (n ^ 1), где ^n — n-й положительный корень уравнения tgx = —x/hL.
5. у'ЧЛу = 0, МО)-у'(О) = hy(L) + y'(L) = 0(h> 0); Лп = /32/L2,yn(x) = /Зп cos/3nx/L +
+ /iL sin /3nx/L (n ^ 1), где /?n — n-й положительный корень уравнения tg x = 2hLx/(x2 —
— h2L2). Оцените /?n для больших п, сделав набросок графиков функции у = 2/iLctgx
и гиперболы у = (ж2 — h2L2)/x.
6. Покажите, что задача Штурма-Лиувилля у" + Ау = 0, у@) = у'A/) = 0 приводит к
расположенному по синусам ряду нечетного продолжения функции в уравнении B9) (см. задачу 2).
В задачах 7-10 представьте заданную функцию f(x) в виде ряда по собственным функциям
указанной задачи Штурма-Лиувилля.
7. f(x) = 1; задача Штурма-Лиувилля из примера 5
8. f(x) = 1; задача Штурма-Лиувилля из задачи 3
9. f(x) = x; задача Штурма-Лиувилля из примера 5 при L = 1
10. f(x) = х\ задача Штурма-Лиувилля из задачи 3 при L = 1
В задачах 11-14 рассматривается регулярная задача Штурма-Лиувилля
y" + \y = Q @<x<L);
j/@) = 0, hy(L)-y'(L)=0,
где h > 0. Обратите внимание, что теорема 1 не исключает наличие отрицательных собственных
значений.
11. Покажите, что До = 0 — собственное значение тогда и только тогда, когда hL = 1, причем
в этом случае соответствующая собственная функция равна уо(х) = х.
12. Покажите, что задача C3) имеет единственное отрицательное собственное значение Ао тогда
и только тогда, когда hL > 1, причем в этом случае Ао = —0q/L2 и уо(х) = sinh./3ox/L9
где Д) — положительный корень уравнения tanhx = x/hL. (Указание. Сделайте набросок
графиков функций у = tanh x и у = x/hL.)
13. Покажите, что положительные собственные значения и соответствующие собственные функции
задачи C3) имеют вид An = p^/L2 и уп(х) = sin/3nx/L (п ^ 1), где /Зп — n-й положительный
корень уравнения tg x = x/hL.
10.1. Задачи Штурма-Лиувилля и разложения ... 893
14. Предположим, что hL = 1 в C3) и что функция f(x) является кусочно гладкой. Покажите, что
Зпх
L '
f(x) — сох + 2^Сп sm
п=1
где {/Зп}^° — положительные корни уравнения tgx = x и
/ЗпХ
3 [L
со = уз L xf(x) dx,
15. Покажите, что собственные значения и собственные функции задачи Штурма-Лиувилля
у" + \у = 0 @<ж<1);
у@)+у'@)=0, г/A) = 0
выражаются формулами До = 0, уо(х) = х — 1 и
An = /?п, 2М(ж) = Рп cos /?пж - sin /3nx
для п ^ 1, где {/?п}^° — положительные корни уравнения tgx = х.
16. Начав с уравнения
А(х)у" + В{х)у' + С{х)у + А£>(х)у = 0,
сначала разделите обе его части на А(х), а затем умножьте на
p(*)=exp(I!|)da:)-
Покажите, что получившееся уравнение может быть написано в виде Штурма-Лиувилля
- q(x)y + Xr(x)y = 0,
А.
dx
где q(x) = —p(x)C(x)/A{x) и
r(x) = p(x)D{x)/A{x).
Нагруженная однородная балка
Рассмотрим однородную балку с [направленной вниз] нагрузкой w(x). Функция у(х), выражающая
отклонение такой балки, удовлетворяет уравнению четвертого порядка
EIy{4) = w(x)
i
для 0 < х < L и следующим условиям в конечных точках:
• у = у" = 0 на подвешенном (свободно опертом или шарнирно закрепленном) конце;
• у = у' = 0 на фиксированном (встроенном, заделанном) конце;
• у" — У^ = 0 на свободном конце.
В случае, если каждый конец является подвешенным (свободно опертым или шарнирно
закрепленным), решение у(х) можно найти с помощью метода рядов Фурье, обсуждавшегося в разделе 9.4,
т. е. подстановкой ряда Фурье
у(х) = Ylbn sin "т~
894 Глава 10. Собственные значения и краевые (граничные) задачи
в дифференциальное уравнение
оо
EIyD) = w(x) = V en sin ^ C4)
г7=1 Ь
(где сп — п-м коэффициент расположенного по синусам ряда Фурье функции w(x)) для
последующего определения коэффициентов {Ьп}.
17. Предположим, что w постоянно в уравнении C4). Примените описанный здесь метод, чтобы
получить функцию, выражающую отклонение
, ч 4wL4 v^ I . пкх
у(х) = „г - > —г-SU1 ——.
п нечетное
18. Предположим, что w = Ьх в C4). Получите функцию, выражающую отклонение
, N 26L5 ^ (_i)^+i . П7ГХ
V\x) = ^г с > -—^ sm —=—.
УК } Е1тг5 ^ пъ L
71=1
Метод, используемый в задачах 17 и 18, приводит к успеху потому, что функции sm(nivx/L)
удовлетворяют условиям подвешенности (или шарнирного закрепления) на обоих концах г/@) =
= у"@) = y(L) = y"(L) = 0, таким же условиям, которым должно удовлетворять и решение
у{х).
Если вместо этого оба конца балки фиксированы, то вместо синусоидальных функций мы
можем использовать собственные функции задачи
УD)-\у = 0 @<x<L); r
у@)=»'@) = 0, y(L)=y'(L)=0,
потому что эти собственные функции удовлетворяют условиям закрепленности на обеих концах
(т. е. в обоих конечных точках). Все собственные значения этой задачи положительны и, согласно
задачи 22, соответствующие собственные функции ортогональны с весовой функцией г(х) = 1.
Следовательно, мы можем написать
оо w(x)yn(x)dx
w(x) = ^2 CnJ/nCa;), Cn = -^ ■ , C6)
[Уп{х)\
Jo
2 dx
согласно аналогу теоремы 3, который справедлив для задачи C5). Если мы обозначим А = а4, то
уп(х) примет вид
у(х) = A cosh ax + В sinh ax + С cos ax + D sin ax, C7)
где а = ап, поэтому из этого следует, что гД (х) = a^ynix). Когда мы подставляем ряд у{х) =
= ]С Ьпуп(х) (который, очевидно, удовлетворяет условиям закрепленности на обоих концах (т. е.
в обоих конечных точках) — условиям в C5)), мы получим
оо оо
EI^2 bnOL^ynix) = ^Г
10.1. Задачи Штурма-Лиувилля и разложения ... 895
Следовательно, EIbnott. = Сп» так что функция, выражающая отклонение балки, имеет вид
у(*) = £ wbУп{х)- C8)
В следующих задачах рассматриваются собственные значения и собственные функции
задачи C5) и подобных задач.
19. Начните с общего решения C7) уравнения у^ — а4у = 0. Сначала обратите внимание, что
из у@) = у'@) = 0 следует, что С — —Ли D = —В. Затем наложите условия y(L) =
= y'(L) = 0 и получите два однородных линейных уравнения, содержащие А и В.
Следовательно, детерминант из коэффициентов А и В должен обратиться в нуль; выведите из этого,
что cosh aL cos aL = 1. Заключите, что п-е собственное значение равно An = j34/L4, где
{/Зп}^ — положительные корни уравнения coshхcos х = 1 (рис. 10.1.3). Наконец, покажите,
что соответствующая собственная функция имеет вид
Уп(х) = (sinh/Зп — sin/3n) I cosh -j cos
u\ _
L )
— (cosh/3n — cos Cn) ( sinh
U) (sir
f3nx
sin
%x\
L J'
у = cos x
Рис. 10.1.3. Решения уравнения
cosh x cos x = 1 (на графике
масштаб по осям не соблюдается)
20. Для случая консоли (балка, один конец которой подвешен (или закреплен на шарнире), а второй
свободен), мы должны решить задачу на собственные значения
УD) - Ху = 0
У@) = у'@) = 0,
@ < х < £);
y"(L) = yC>(L) = 0.
Приступая к решению, как и в задаче 19, покажите, что n-е собственное значение равно Ап =
=ь /3*/L4, где {/Зп}^° — положительные корни уравнения cosh x cos х = —1. Затем найдите
соответствующую собственную функцию.
21. Рассмотрим задачу на собственные значения
УЮ - Ху = 0, 2/@) = у'@) = 0 = y(L) = »"(L),
соответствующую балке, один конец которой закреплен (заделан), а второй лежит на
шарнирной опоре. Покажите, что n-е собственное значение равно Ап = /34/L4, где {f3n}^° —
положительные корни уравнения tanh х = tg x.
896 Глава 10. Собственные значения и краевые (граничные) задачи
„D)
,/4)
22. Предположим, что у™ = Amym и у^ = ХпУп- Примените метод, который использовался при
доказательстве теоремы 2, и дважды проинтегрируйте по частям, чтобы показать, что
(Лт
" An) f
Jo
Ут(х)уп(х) dx =
Уп(х)
d3ym
dx3
Ут(х)
d3yn _ dyn d2ym _j_ dym d2y4
dx3 dx dx2
+ ■
dx dx2
Отсюда эыведите, что если каждое условие в конечной точке имеет вид у = у' = 0, у = у" = 0
либо у" = у^ = 0, то ут и уп ортогональны, если Ат ф An-
ЮЛ. Приложение. Численные методы разложения
по собственным функциям
Мы с помощью пакета Matlab демонстрируем основные численные методы исследования
разложения в ряд по собственным функциям
/(*) = £
2A-008/3»)
{A,(l + 2cos2/?„)
sin (Зпх
О)
для 0 < х < 1. (Мы взяли А = 1 в равенстве C2) из этого раздела.) По приведенным здесь
образцам совсем несложно составить аналогичные программы для Maple и Mathematica.
В решении примера 7 мы видели, что значения {/Зп } ^° в уравнении A) являются
положительными решениями уравнения tg х = —2х. Кроме того, как показано на рис. 10.1.1 (для
подобного уравнения tg х = —х)9 значение (Зп (для большого п) только немного больше, чем
Bп — 1Oг/2. Но из-за разрывов функции тангенс около этих решений для автоматического
поиска корня лучше переписать наше уравнение для собственных значений в форме
sin# + 2#cos# = 0.
B)
Тогда команда пакета Matlab
b = fsolve (fsin(x)+2*x.*cos(x) ', pi/2 + 0.1+@:pi:99*pi));
быстро находит первые 100 значений /Зп (рис. 10.1.4). (Мы задали вектор
х0 = ^ + 0,1 + [ 0 тг 2тг Зтг
99тг]
10Q начальных приближений.) Команды
х = 0 : 1/200 : 1;
for n = 1 : 4
plot(x, sin(b (n)*x)
end
чертят график первых четырех собственных функций (рис. 10.1.5).
Вы можете найти разность между последующим и предыдущим корнями. Для этого
достаточно применить команду dif f (b) пакета MATLAB. Этим вы проверите, что (Зп —
— /3n_i « 3,1416 для п ^ 65. Таким образом, последовательные собственные значения,
действительно отстоят одно от другого на 7г. Команда
10.1. Задачи Штурма-Лиувилля и разложения ... 897
п
1
2
3
4
5
6
7
8
9
10
0ш
1,8366
4,8158
7,9171
11,0408
14,1724
17,3076
20,4448
23,5831
26,7222
29,8619
Рис. 10.1.4. Первые десять
положительных решений уравнения B)
Рис. 10.1.5. Собственные функции
l)n(x) = sin /Зпх для п = 1,2,3,4
с = 2*A - cos(b))./(b.*(l + 2*cos(b).A2));
вычисляет первые 100 коэффициентов разложения в ряд по собственным функциям A). Мы
находим, что
f(x) « A,2083) sin/Зхх + @,3646) smC2x + @,2664) smC3x +
+ @,1722) smC4x + • • • + @,0066) sin/397^ + @,0065) smC98x +
+ @,0065) sinC99x + @,0064) sin/Зюож
с числовыми коэффициентами, очевидно, уменьшающими весьма медленно. Наконец,
команды
-х = 0 : 1/500 : 1;
у = zeros(size(x));
for n = 1 : 100
у = у + с (n) *sin (b (n) *x) ;
end
plot(х,у)
чертят график этой частичной суммы (рис. 10.1.6). Обратите внимание на явление Гиббса,
которое проявляется в точке х = 0.
Вы можете проверить, насколько хорошо вы научились использовать разложения по
собственным функциям, еще раз самостоятельно решив пример 7, но теперь возьмите интервал
0 < х < L и условие в правой конечной точке C0) замените условием y(L) + ky'(L) = 0.
Выберите ваши собственные значения L > 1 и к > 2. Затем вычислите новые значения /Зп
и постройте чертеж (график), подобный приведенным на рис. 10.1.5 и 10.1.6. На рис. 10.1.6
мы видим сходимость к f(x) = 1 внутри интервала 0 < х < 1, если пренебречь типичным
явлением Гиббса в точке х = 0.
898 Глава 10. Собственные значения и краевые (граничные) задачи
25 членов
50 членов
* 0
:
V
*ч 0
.: ^
^~-
о
at
100 членов
>ч О
-1
1 ' .•
_^_н
^
Рис. 10.1.6. Графики частичной суммы X^n=i с™ s*n /?п#рядапо собственным
функциям в уравнении A) для N = 2Б, N = 50, N = 100
10.2. Приложения рядов по собственным функциям
Этот раздел посвящен трем примерам, которые иллюстрируют приложение разложения
в ряд по собственным функциям (обсуждаемого в разделе 10.1) к задачам, в которых заданы
граничные (краевые) значения. В каждом примере метод разделения переменных приводит
к задаче Штурма-Лиувилля, в которой собственные функции используются как
стандартные блоки, из которых строится решение, удовлетворяющее неоднородному граничному
условию в первоначальной задаче. \
Пример 1
Однородная плита из материала с коэффициентом
температуропроводности к занимает пространственную область 0 й х й L, первоначально
температура всей плиты равна Uq. Начиная с момента времени t — 0, на
стороне х = 0 поддерживается нулевая температура, а на стороне х = L
имеет место теплообмен с окружающей средой при нулевой температуре,
10.2. Приложения рядов по собственным функциям 899
так что там Ни + их = 0 (задача 23 из раздела 9.5; константа h —
соответствующий коэффициент теплопередачи). Мы хотим найти температуру
и(х, t) плиты в точке х в момент времени t; u(x, t) является решением
граничной (краевой) задачи (задачи, в которой заданы граничные
(предельные, или краевые) значения)
щ = кихх @ < х < L, £ > 0); A)
и@,*) = 0, B)
hu(L,t)+ux(L,t) = 0, C)
u(x,0) = C/b. D)
Решение Как и в разделе 9.5? мы начинаем с подстановки u(x,t) = X{x)T(t)
в уравнение A) и таким образом, как обычно, получаем
X " кТ~ '
так что
X" + XX = Т + ХкТ = 0. E)
Теперь уравнение B) дает Х@) = 0, а уравнение C) приводит
к hX(L)T(t) -f X'(L)T(t) = 0. Естественно, мы предполагаем, что T(t)
не является тождественно нулевой (потому что мы ищем ненулевое
решение); из этого следует, что Х(х) и А является решением задачи Штурма-
Лиувилля
Х" + XX = 0 @<x<L);
Х@) = 0, hX(L) + X'{L) = 0. F)
В примере 3 из раздела 10.1 мы нашли, что собственные значения и
соответствующие им собственные функции этой задачи равны
А„ = §, JMx) = sin^ G)
для п = 1,2,3,..., где (Зп обозначает n-й положительный корень
уравнения
**—w (8)
Подставив А = 0^/Ь2 в правую часть уравнения E), получим
уравнение первого порядка
rpt _ Рп^гр
±п ~~ Т.2 п
решение которого (с точностью до мультипликативной константы) имеет
вид
( fikt\
Гл(«)^ёхр -^з- . (9)
900 Глава 10. Собственные значения и краевые (граничные) задачи
Следовательно, каждая функция
un(x,t) = Xn(x)Tn(t) = exp ( -^ ) sin ^
удовлетворяет однородным условиям A) - C) граничной (краевой) задачи
(задачи, в которой заданы граничные (предельные, или краевые)
значения) . Нам остается только выбрать коэффициенты так, чтобы формальный
ряд
и(х, *) = 2L,Cn exp I —72" ) sm ~~Г~ ( ^
п=1 ^ '
также удовлетворял и неоднородному условию
РпХ
cnsin
71=1
и(ж, 0) = ^ сп sin ^ = С/0. A1)
Теперь г(х) = 1 в задаче Штурма-Лиувилля F), так что по теореме 3
в соответствии с равенством B5) из раздела 10.1 мы можем удовлетворить
уравнению A1), выбирая
Г-
JO
dx
Сп = ~~ЛГ
2 Рпх
Но
sin —— dx
JL
U0 sm —— dx = —- A - cosPn),
Jo ^ Рп
и, по сути, теми же самыми вычислениями, что и в примере 5 из
раздела 10.1, мы находим, что
sin2 -у- dx = —- {hL -f cos2 /3n) .
Jo L 2д
Следовательно,
_ 2C/0feL(l-cos2/3n)
Cn~ /3n(/*L + cos2/?n) '
и подстановка этого значения в A0) дает формальное решение в виде ряда
( 4\ пттит\^ l-cos/3n / 0jkt\ . 0пх
ti(*,t) = 2Wg /?n(feL + CQs2/?n) exp (--gj-j вшт. A2)
Замечание. Численное исследование разложения в ряд по собственным функциям A2)
приведено в приложении к этому разделу, где рассказано, как провести все необходимые
вычисления. ■
10.2. Приложения рядов по собственным функциям 901
Продольные колебания стержня
Предположим, что однородный упругий стержень имеет длину L, площадь поперечного
сечения А, плотность S (масса на единицу объема) и занимает интервал 0 ^ х ^ L,
когда он нерастянут. Мы рассматриваем продольные колебания стержня, при которых каждое
поперечное сечение (нормальное к оси х) перемещается только вдоль направления оси х.
Мы можем в таком случае описать движение стержня в терминах смещения и(х, t) в
момент времени t поперечного сечения, которое в нерастянутом положении находится в точке
с координатой х. Из закона Гука и определения модуля Юнга Е материала стержня следует
(см. задачу 13), что сила F(x, t), действующая на поперечное сечение х и приложенная со
стороны той части стержня, которая расположена слева от этого сечения, равна
- F(x,t) = -AEux(x,t), A3)
причем знак "минус" показывает, что F направлена влево, когда их > 0 (так что стержень
тогда растянут в окрестности ж, а не сжат) (рис. 10.2.1).
х + Лх
Рис. 10.2.1. Маленький
сегмент стержня
Мы берем уравнение A3) в качестве отправной точки для нашего вывода
дифференциального уравнения в частных производных, которому удовлетворяет функция u(x,i)9
выражающая смещение, когда смещения являются настолько малыми, что может быть
применен закон Гука. Применяя второй закон Ньютона движения к сегменту стержня между
поперечным сечением х и поперечным сечением х 4- Ах9 получаем
(8 A Ax)utt (ж, t)&-F(x + Ax,t) + F(x,t) =
= АЕ [их(х 4- Ах, t) - их(х, t)], A4)
где х обозначает середину интервала [х, х 4- Ах], потому что этот сегмент имеет массу 6 А А х9
а его ускорение приблизительно равно ии (х, i). Когда мы разделим это выражение в A4) на
5А Ах и затем перейдем к пределу при Ах —» 0, в результате получим одномерное волновое
уравнение
w д2и 2д2и
> w = aw> A5)
где
а2 = f • A6)
Поскольку уравнение A5) совпадает с уравнением колебаний струны, из нашего обсуждения
решения Даламбера в разделе 9.6 следует, что [свободные] продольные колебания стержня
с фиксированными концами могут представлены в виде волн вида и(х, t) = F(x ± at).
Скорость а — у/Е/6, с которой осуществляется это перемещение волн, равна скорости звука
902 Глава 10. Собственные значения и краевые (граничные) задачи
в материале стержня. Действительно, волновое уравнение A5) также описывает
обыкновенные одномерные звуковые волны в газе, находящемся в трубе. В этом случае Е в
уравнении A6) обозначает модуль объемной деформации (модуль объемного сжатия, модуль
объемной упругости) (дробь, показывающая увеличение плотности при увеличение
давления на единицу давления) газа, a S является его равновесной плотностью.
Пример 2
Длина стержня равна L, плотность — J, площадь поперечного сечения —
Л, модуль Юнга — Е,и полная масса — М = SAL. Конец х = 0 стержня
фиксирован (закреплен, защемлен), а на его свободном конце
закреплена материальная точка массы т (рис. 10.2.2). Стержень первоначально
растягивается линейно, поскольку материальная точка массы т
перемещается на расстояние d — bL направо; в момент времени t = 0 система
отпускается из состояния покоя. Чтобы определить последующие
колебания стержня, мы должны решить граничную (краевую) задачу (задачу,
в которой заданы граничные (предельные, или краевые) значения)
u@, t)
mutt(L, t)
гх(ж, 0)
о,
@ <"x < I, t > 0);
: -AEux(L,t),
bXi ; Ut(X,0)
0.
A7a)
A7b)
A7c)
A7d)
Рис. 10.2.2. Система,
состоящая из материальной точки
заданной массы на стержне из
примера2
Решение Условие в конечной точке х = L следует из равенства та = mutt для
массы, на которую в соответствии с равенством A3) действует сила F =
= — АЕих, поскольку в этом случае на материальную точку заданной
массы действует только стержень. Подстановка и(х, t) = X(x)T(t) в иц =
= а2ихх приводит, как обычно, к уравнениям
X" + АХ = 0, Т" + \а2Т = 0.
A8)
Изграничного(краевого,предельного)условияA7Ь)следует,чтогб@, t) =
= X@)T(t) = 0,такчтоодноусловиевконечнойточкеимеетвидХ@) =
= 0, Поскольку ии — XT'1 и их — Х'Т, уравнение A7с) приводит к
mX(L)T"(t) = -AEX'(L)T(t),
и мы получаем еще одно условие в конечной точке. Подстановка
T"(t) = -Xa2T(t) = -^pr(t),
10.2. Приложения рядов по собственным функциям
903
с последующим делением на —ET(t)/S, дает равенство m\X(L) =
= ASX'(L). Таким образом, задача на собственные значения для Х{х)
имеет вид
X" + XX = 0;
Х@) = 0, mXX(L) = ASX'(L).
A9)
Важно отметить, что поскольку в условии в правой конечной точке
присутствует А, это не задача Штурма-Лиувилля, так что теоремы 1-3 из
раздела 10.1 не применимы. Однако все собственные значения задачи A9)
положительны (задача 9). Мы поэтому пишем А = а2, и заметьте, что
Х(х) = sin ах удовлетворяет условию Х@) = 0. Условие в правой
конечной точке в A9) тогда дает
та2 sin aL = Ада cos aL,
и, таким образом,
tg aL =
AS _ М/т
aL
та
B0)
где М — A6L. Мы полагаем /3 = aL; из этого следует, что собственные
значения задачи A9) и соответствующие им собственные функции
Хп = ^, Хп(х) = sin —
для п = 1,2,3,..., где {/Зп}^° — положительные корни уравнения
М/т
tgx=——,
х
обозначенные точками на рис. 10.2.3.
B1)
B2)
Рис. 10.2.3. Положительные
корни {/Зп}^° уравнения B2)
904 Глава 10. Собственные значения и краевые (граничные) задачи
Затем обычным способом из
Г;' + ^!гп = 0, Гп@) = 0 B3)
мы выводим, что Tn(t) = cos(/3nat/L) с точностью до
мультипликативной константы. Таким образом, остается только найти коэффициенты
{сп}^° так, чтобы ряд
> и(х, t) = > сп cos —— sin —— B4)
п—Х
удовлетворял неоднородному условию
и(х,0) = Vcnsin ^ = f(x) = bx. B5)
Но требуется соблюдать осторожность, потому что A9) — вовсе не задача
Штурма-Лиувилля. Действительно, в задачах 14 и 15 мы просим вас
показать, что собственные функции {sin(/3nx/L)}^° не ортогональны
на интервале [0, L], так что формула для коэффициентов, выраженная
равенством B5) раздела 10.1, здесь не применима.
Но в случае продольных колебаний обычно непосредственно сама
функция и(х, £), выражающая смещение, не так уж и необходима.
Гораздо больший интерес представляет собой ответ на вопрос, как
собственные частоты колебаний стержня зависят от массы т материальной точки,
закрепленной на его свободном конце. Независимо от значений
коэффициентов в равенстве B5), из уравнения B4) мы видим, что n-я круговая
частота равна
(Зпа (Зп ГЁ
^ = -F = TV7' B6)
где рп — n-е положительное решение (корень) уравнения B2), которое
может быть перезаписано в форме
ctgx = —. B7)
Таким образом, собственные частоты определяются отношением массы
т к полной массе М стержня. ■
Замечание. В случае отсутствия массы на свободном конце стержня естественно
считать, что т = 0. Тогда уравнение B7) приводит к уравнению cos ж = 0, чье n-е
положительное решение (корень) (Зп = Bп — 1Oг/2. Тогда n-я круговая частота выражается
формулой
Bп-1)тг ГЁ
В задаче 8 мы просим вас получить этот результат непосредственно, начиная с граничной
(краевой) задачи (задачи, в которой заданы граничные (предельные, или краевые)
значения) для стержня с одним фиксированным (закрепленным, защемленным) концом и другим
полностью свободным концом. ■
10.2. Приложения рядов по собственным функциям 905
Поперечные колебания стержней
Мы теперь обсудим колебания однородного упругого стержня, в котором движение каждой
точки является не продольным, а перпендикулярным к оси х (ось стержня в его положении
равновесия). Пусть у(х, t) обозначает поперечное смещение поперечного сечения в точке
х в момент времени £, как показано на рис. 10.2.4. Мы просто хотим наметить основные
этапы вывода дифференциального уравнения в частных производных, которому
удовлетворяет функция, выражающая отклонение у(х, t). Вспомните сначала, что в разделе 3.8 мы
вывели уравнение Ely^ = F для статического отклонения стержня или балки под
влиянием поперечной внешней силы F (действующей на единицу длины). Согласно общему
динамическому принципу, мы можем преобразовать статическое уравнение Ely^ = F
в уравнение динамики (при отсутствии внешней силы), заменяя F противоположно
направленной силой инерции F = —pytu где р является линейной плотностью (масса/длина)
стержня, и, кроме того, заменяя у^ на уХххх- Это дает уравнение
>
котор
>
гле
д*у_ д*у
ое может быть записано в форме
dt*+ a дх* и'
а4 = —
B9)
C0)
Р
Следующий пример иллюстрируетрешение этого дифференциального уравнения в частных
производных четвертого порядка методом разделения переменных.
У(х, t)
Рис. 10.2.4. Стержень,
совершающий поперечные колебания
Пример 3
Однородный стержень с линейной плотностью р, модулем Юнга Е и
моментом инерции поперечного сечения / просто поддерживается (или
закреплен шарнирно) в его двух концах х — 0 и х = L. Если стержень
приведен в движение из состояния покоя с данным начальным
положением f(x), то функция, позволяющая вычислить его смещение у(х,£),
является решением граничной (краевой) задачи (задачи, в которой
заданы граничные (предельные, или краевые) зйачения)
Уи + а4Ухххх = 0 @ < х < L, t > 0); C1а)
2/@,*) = yxx@,t) = y(L,t) = yxx(L,t) = 0, C1b)
y(ay0) = /(ж), yt(x,0)=0. C1c)
906 Глава 10. Собственные значения и краевые (граничные) задачи
Найдем у(х, t). Граничные условия C lb) — условия подвеса конца (или
шарнирного закрепления), их вид мы принимаем без доказательства,
а условия C1 с) — начальные условия.
Решение Подстановка y(x,t) = X (x)T(t) в дифференциальном уравнении
приводит к уравнению XT" + а4Х^Т = 0, так что
X а4Т v '
Чтобы определить знак А, мы замечаем, что уравнение
Г" + Ха4Т = 0 C3)
должно иметь тригонометрические, а не экспоненциальные решения.
Причина состоит в том, что на основе практического опыта —
например, с камертонами или ксилофонными стержнями, — каждый ожидает,
что имеют место периодические колебания. Это не могло произойти, если
бы А были отрицательны и уравнение C3) имело экспоненциальные
решения. Следовательно, А должно быть положительным и удобно писать
А = а4 > 0. Тогда X(t) должно удовлетворять уравнению
Х{4)(х)-а4Х{х) = 0, C4)
которое имеет общее решение
Х(х) —A cos ax + В sin ax + С cosh ax + D sinh ax,
причем
X"{t) = a2(—Acosax — Bsinax + Ccoshax + Dsinhax).
Условия в конечных точках в C1) дают равенства
Х@) = Х"@) = X(L) = X"(L) = 0. C5)
Следовательно,
Х@) = А + С = 0 и Х"@) = -А + С = 0,
а из этих двух уравнений следует, что А = С = 0. Поэтому
X(L) = В sinaL + D sinhaL = 0
и
X"(L) = а2 {-В sin aL + D sinh aL) = 0.
Из этого следует, что
В sin aL = 0 и D sinh aL = 0.
1Q.2* Приложения рядов по собственным функциям 907
Но smb. aL ф 0, потому что а ф 0; следовательно, D = 0.
Следовательно, J3 ф 0, если мы должны иметь нетривиальное решение, так что
sin aL = 0. Таким образом, а должно быть (целым) кратным W/L.
Поэтому собственные значения и соответствующие им собственные функции
задачи, определенной уравнениями C4) и C5), имеют вид
Лп = < = -^4", Хп{х) = sin — C6)
для п = 1,2, Зу....
Подставляя А = n47r4/L4 в C3), получаем уравнение
Т^ + ^-Тп = 0. C7)
Поскольку из начального условия yt(x, 0) = 0 следует, что Х^@) = 0, мы
полагаем и /
' "' Г„(«) = сов^^. C8)
Объединяя результаты в C6) и C8), мы конструируем ряд
'7г2а2£ . птгх
/ ^\ V™^ П27Г2аЧ . ПТГХ _ЛЧ
y{x,t) = 2^cnCos———sin-у-, C9)
n=l
который формально удовлетворяет дифференциальному уравнению
в частных производных в C1) и однородным граничным условиям.
Неоднородное условие имеет вид
/ ^\ V^4 . TVKX „, ч
у(х,0) = 2^спsin — = /(х),
так что мы вычисляем коэффициенты расположенного по синусам ряда
Фурье по формулам
w 2 f ,. . . птгх , ,л^
Сп = у / W sin -J- dx, D0)
чтобы равенство C9) действительно давало формальное решение в виде
ряда. ■
Обратите внимание, что круговая частрта n-го члена в C9) равна
га27г2а2 о „1Ч
Шп = L2 = ь ^ *
где основная частота (частота основной (первой) гармоники, (наинизшая) собственная
частота) стержня равна
тг2а2 тг2 [EI
- и1т-1^^тт' D2)
908 Глава 10. Собственные значения и краевые (граничные) задачи
Поскольку частота каждой более высокой гармоники кратна ui9 звук вибрирующего стержня
с просто подвешенными (или закрепленными на шарнире) концами является музыкальным.
Поскольку более высокие частоты { n2u>i} £° более редки, чем более высокие частоты { nui} ^°
колебаний струны, то тон колебаний стержня более чист, чем тон колебаний струны. Это
частично объясняет шелковистость (вкрадчивость, плавность, бархатность) звука виброфона,
на котором так любил играть Милт Джексон (Milt Jackson), бывший участник современного
джазового квартета Modern Jazz Quartet.
10.2. Задачи ';
В задачах 1-6 найдите формальные решения граничных задач в виде ряда. Выразите каждый
ответ в форме, данной в ответе к задаче 1.
1. ut = kuxx @ < х < L, t>0); ux@, t) = hu(L, t) + ux(L, t) = 0, u(x, 0) = /(x)
Ответ.
, .v f ( Pnkt\ Pnx
u(x, t) = 2^Cn exp ( —— J cos —,
n=l ^ '
где {Cn}^° — положительные корни уравнения tgx = hL/x и
2h [L fax
% Cn = ».r . • 2 д f(X> COS " dx'
hL 4- sin Cn Jo L
2. uxx + uyy =0 @ < x < L, 0 < у < L); w@,y) = hu(L,y) + ux(L,y) = 0, u(x,L) = 0,
u(x,0) = f(x)
3. uxx -h Uyy = 0 @ < x < L, 0 < у < L); uy(x,0) = hii(x, L) + иу(х, L) = 0, u(L, y) = 0,
u@yy) = g(y)
4. uxx + Uyy =0 @ < x < L, у > 0); u@, y) — hu(L, y) + ux(L, y) = 0, u(x, у) ограничена
при у —► +oo, u(x, 0) = /(ж)
5. wt = Ь2Ж @ < x < L, £ > 0); /ш@, £) - ux@, t) — u(L, t) = 0, u(x,0) = f(x)
6. wt = kuxx @ < x < L, £ > 0); Ы@, £) - ux@, t) = /m(L, t) + u*(L, £) = 0, u(x, 0) = /(x)
7. Пусть w(x, 2/) обозначает ограниченную установившуюся температуру (температуру в
установившемся режиме) в бесконечно высокой стене с основой у = 0 и с торцами х = 0 и х = 1.
Торец х = 0 изолирован, а в основе у = 0 поддерживается температура 100° С, причем имеет
место теплообмен при h = 1 в торце х = 1. Получите решение
ехр (—апу) sin an cos anx
+ sin an cos an
где {an}J° — положительные корни уравнения ctgx = х. Пусть e*i = 0,860, oli = 3,426,
аз = 6,437 иа4 = 9,529. Вычислите температуру иA,1) с точностью до 0,1° С.
8. Если к концу х — L стержня в примере 2 масса не прикреплена, то уравнение A7с) заменяется
условием свободного конца Ua>(L,t) = 0. Отделите переменные в полученной граничной задаче
и получите решение в виде ряда
, ,ч v—4 Bп — l)irat . Bп — 1)ттх
и{Х, t) = 2^ СП COS ^ Sin — ,
n=l
2fLL . Bn-lOrxJ 8Щ-1Г+1
= — ox sin —-— dx = /n —' 0 .
L J0 2L Bn - 1Jтг2
2L 2L
n=l
где
cn
В частности, собственные частоты продольных колебаний стержня выражаются равенством B8).
10.2. Приложения рядов по собственным функциям 909
9. (а) Покажите, что Л = 0 не является собственным значением задачи A9). (Ь) Покажите, что эта
задача не имеет отрицательных собственных значений. (Указание. Сделайте набросок графиков
у — tanhx и у = — k/х при к > 0.)
10. Вычислите скорость (в милях в час) продольных звуковых волн в каждом из следующих
случаев, (а) Сталь, с S = 7,75 г/см3 и Е = 2 х 1012 в единицах системы СГС (т. е. в единицах
системы сантиметр-грамм-секунда). (Ь) Вода с S = 1 г/см3 и объемный модуль К = 2,25 х
х 1010 в единицах системы СГС (т. е. в единицах системы сантиметр-грамм-секунда).
11. Рассмотрим массу т = пто идеального газа молекулярного веса то, чье давление р и объем
V удовлетворяют закону pV = пКГк, где п — число молей газа, R = 8314 в единицах системы
МКС (метр-килограмм-секунда) и Тк = Тс + 273, причем Тс — температура по Цельсию.
Модуль объемного сжатия (модуль объемной упругости) газа равен К = jp, где значение
. безразмерной константы 7 равно 1,4 для воздуха, имеющего молекулярный вес то = 29.
(а) Покажите, что скорость звука в этом газе равна
то
(Ь) С помощью этой формулы покажите, что скорость звука в воздухе при температуре Тс по
Цельсию равна приблизительно 740 + A,36)Тс миль в час.
12. Предположим, что к свободному концу стержня из примера 2 прикреплена пружина (а не
материальная точка заданной массы), как показано на рис. 10.2.5. Условие в конечной точке
тогда принимает вид ku(L, t) + AEux(L, t) = 0. (Почему?) Предположим, что u(x, 0) = f(x)
ищ(х,0) = 0. Получите решение в форме
и(х, ъ) = > сп cos —=— sin -у—,
^ ^—J Li Li
n=l
где {/?n}^° — положительные корни уравнения tgsc = —AEx/kL.
Рис. 10.2.5. Стержень из задачи 12
13. Если стержень имеет естественную длину L, площадь поперечного сечения А и модуль Юнга
Е, то (как следствие закона Гука) осевая сила на каждом конце, требуемая для того, чтобы
растянуть этот стержень на маленькую длину AL, равна F = (АЕ AL)/L. Примените этот
результат к сегменту стержня естественной длины L = Ах между поперечными сечениями
в точках х и х + Ах, который растянут на расстояние AL = u(x + Ах,£) — u(x,t). Затем
перейдите к пределу при Ах —> 0 и выведите уравнение A3).
14. Покажите, что собственные функции {Хп(х)}^° задачи A9) не ортогональны. (Указание.
Используйте равенство B2) из раздела 10.1 и покажите, что если т ф п, то
f Xm(x)Xn(x)dx = -^Xm(L)Xn(L).)
15. Покажите, что собственные функции {sin^n^/b}^° задачи A9) не ортогональны; для этого
непосредственно вычислите значение интеграла
[L . /ЗтХ . /ЗпХ
sin sin —— ах.
Jo L L
(Указание. Используйте тот факт,что {(Зп}^° — корни уравнения xtgx = М/т.)
910 Глава 10. Собственные значения и краевые (граничные) задачи
16. Согласно задаче 19 из раздела 9.7 температура w(r, t) в однородном твердом сферическом шаре
радиуса а удовлетворяет дифференциальному уравнению в частных производных (ru)t =
= k(ru)rr. Предположим, что шар имеет начальную температуру и(г, 0) = /(г) и что его
поверхность г — а изолирована, так что ur(a, t) = 0. Подставьте г?(г, t) = ru(r, t) и получите
решение
u(r,t) = со + 2^ 7"еХР {"ИГ) 8Ш ~'
n=l ^ '
где {/Зп}^° — положительные корни уравнения tg х = х и
со = -г r2/(r) dr,
a3 Jo
Сп
— г f (г) sin аг
->n Jo а
a sin2 /3n
(см. задачу 14 из раздела 10.1).
17. Задача о диффузии газа через мембрану приводит к граничной (краевой) задаче (задаче, в
которой заданы граничные (предельные, или краевые) значения)
ut = кихх @ < х < L, t > 0);
u@, t) = ut (L, t) + hkux (L, £) = 0,
гл(ж,0) = 1.
Получите решение
u(x,t) — 4 > — . ^. exp —- sin ——,
~x 2/3* - sin2/3n P V ^2 / £
где {/Зп}™ — положительные корни уравнения xtgx = hL.
18. Предположим, что шарнирно опертый однородный стержень из примера 3 имеет, в отличие от
примера 3, начальное положение у(х,0) = 0 и начальную скорость yt(x,0) = д(х). В этих
предположениях получите решение
""■* 2 2 2.1
П 7Г a t . 717ГХ
у{х, t) = 2^Cn sin —£2— sm -•£-,
где
2L fL / ч . птгж ,
с" = oil 9\х) sm -7— ах.
п27г2а2 Jo Ь
19. Чтобы создать упрощенную модель влияния начального импульса Р, приложенного в середине
х = L/2 шарнирно опертого стержня, подставьте
{Р L L ,
-—, если — -б<#<-^- + €,
2ре' 2 2
0 в противном случае
в результат задачи 18. Затем положите е —» 0 и получите решение
П7Г . 7l27T2a2t . 717ГЖ
-«sm
n2
n=l
где
C =
00 1 2 2 2j.
y(x, *) = С 2^ ^ sm — sm —^— sm —,
2Pb , ь
<к2>/Шр'
10.2. Приложения рядов по собственным функциям 911
20. (а) Пусть д(х) = vo (константа) в задаче 18. Покажите, что
, .ч 4voL2 *--> 1 . n2/K2a2t . П7гх
п нечетное
Это равенство описывает колебания шарнирно опертого стержня, лежащего сзади поперек
пикапа, который врезается в кирпичную стену со скоростью vo в момент времени t = 0. (b)
Теперь предположите, что стержень сделан из стали (Е = 2 х 1012 дин/см2, S = 7,75 г/см3),
имеет квадратное поперечное сечение со стороной а = 1 дюйм (так что / = ^а4) и длину
L = 19 дюймов. Какова его основная частота (частота основной (первой) гармоники,
(наинизшая) собственная частота) (в герцах)?
10.2. Приложение. Численные методы
исследований распространения тепла
Мы с помощью системы Mathematicaпродемонстрируем основные этапы числового
исследования функции, задающей распределение температур
t *\ о ut'ST" l-cosl3n ( filkt\ . /Зпх
«(*,*) = 2u0hL g /3n(feX + cos2/3n) exp ^~p-j sm — A)
в горячей плите из примера 1 в этом разделе. Конечно же, версии такого исследования можно
написать и для других аналогичных систем, например для Maple и Matlab.
Мы предполагаем, что плита имеет толщину L = 50 см, постоянную начальную
температуру г^о = 100°, причем температура 0° поддерживается на левом крае плиты х = 0,
коэффициент температуропроводности к = 0,15 (для железа) и коэффициент
теплопередачи h = 0,1 на правом крае х = L. Согласно уравнению (8) этого раздела, собственные
значения {/Зп}^° уравнения A) — положительные решения уравнения tg х — —x/(hL). Как
и на рис. 10.1.1, мы видим, что, если п является большим, то /Зп лишь немного больше Bп —
— 1Oг/2. Поэтому мы можем приблизить первые 20 этих собственных значений с помощью
команд
L = 50; h = 0.1;
roots = Tablet FindRoot[ Tan[x] == -x/(h*L),));
(* корни = Таблица*)
{x, B*n - l)*Pi/2 + 0.1}], {n,l,20}];
beta = x /. solutions (* решения *j
Первые десять из этих собственных значений перечислены в таблице на рис. 10.2.6.
Следующая функция системы Mathematica теперь суммирует первые 20 отличных от
нуля членов ряда A).
b = beta; u0 = 100; k = 0.15;
с = A - Cos [b] ) / (b* (h*L + Cos[b]A2)); (* коэффициенты *)
u[x , t ] := 2*uO*h*L*Apply [ Plus,
c*Exp[-b*b*k*t/LA2]*Sin[b*x/L] ] // N
На практике достаточно вычислять значение и(х, t) через каждые 10 секунд (или больше)
с точностью до двух десятичных знаков всюду на интервале 0 ^ х ^ 50. (Как проверить это
утверждение?) Команда
912 Глава 10. Собственные значения и краевые (граничные) задачи
п
1
2
3
4
5
6
7
8
9
10
\Л ;'''"'
2,6537
5,4544
8,3913
11,4086
14,4699
17,5562
20,6578
23,7693
26,8874
30,0102
Рис. 10.2.6. Первые 10
положительных решений (корней)
уравнения
tgx
х
"hi
при L = 50 и h = 0,1. Корни этого
уравнения являются собственными
значениями
Рис. 10.2.7. Распределение
температур в плите через 15
минут
Plot[u[x,900], {x, 0, 50}];
генерирует графики = и(х, 900) для 0 S х = 50, показанный на рис. 10.2.7. Мы видим, что
через 15 минутправыйкрайх = 50плитыохладилсяниже40°,тогдакактемпературывнутри
пластины в окрестности х = 30 остаются довольно высокими, они выше 80°. Команда
Plot[{u[50,t], 25}, {t, 0, 3600}];
генерирует график и = и(Б0, t) для 0 ^ t ^ 3600, показанный на рис. 10.2.8. Теперь мы
видим, что температура плиты на правом крае падает до 25° немного меньше, чем за 2000
секунд. Вычисление
tl = t /. FindRoot[u[50,t] == 25, {t, 2000}]
показывает, что это фактически происходит приблизительно через 1951 с; т. е.
приблизительно через 32 минуты 31 секунду.
На рис. 10.2.9 видно, что температуры внутри плиты в момент времени t\ все еще
остаются довольно высокими, они превышают 50° в некоторых точках, причем максимум
достигается где-то около х = 30. Мы можем найти это максимальное значение температуры
и(х, ti)9 вычислив минимальное значение функции, равной температуре с
противоположным знаком (таким образом, положительные температуры станут отрицательными), т. е.
функции — и(х, ti). Команда
FindMinimum[-u[x,tl], {x, 30}]
приводит к результату, указывающему, что максимальное значение равно wB9,36,ti) «
«53,80°.
10.3. Установившиеся периодические решения ... 913
100
1—I—i—I—I—г
1000 2000 3000
t
Рис. 10.2.8. Распределение
температур на правом крае плиты
Рис. 10.2.9. Распределение
внутренних температур при услрвии,
что температура на правом крае
равна 25°
Исследуйте в этой манере вашу собственную плиту с постоянной начальной
температурой и(х, 0) = 100°. Пусть h = 0,1, L = 50A0 + р) и к = q/Ю, где р — наибольшая,
a q — наименьшая отличная от нуля цифра номера вашего студенческого билета. Выполните
указанные здесь исследования и найдите
• когда температура на правом крае плиты будет равна 25 °;
• максимальную температуру в пределах плиты в этот момент.
Конечно, корни и максимальные значения можно найти численными методами. Однако вы
можете увеличить (масштабировать) графики около соответствующих точек на рисунках,
подобных рис. 10.2.8 и 10.2.9.
10.3. Установившиеся периодические решения
и собственные частоты
В разделе 9.6 мы получили решение
оо ,
71=1 ^
_ ., П7ГаА . П7ГХ
cos — Ь Вп sin —-— I sm
nnat
Т
71=1
задачи о колебаниях струны
5^ Сп cos ( ^^ - 7n } sin
/nirat
L )
WKX
д*у_ 2д*у I
д* ~ а дх* \а' у р
y@,t)=y(L,t)=0,
у(х, 0) = f(x), yt(x, 0) = g(x).
A)
B)
C)
D)
914 Глава 10. Собственные значения и краевые {граничные) задачи
Решение в равенстве A) описывает свободные колебания струны длиной L и линейной
плотностью р цод натяжением Т; достоянные коэффициенты в уравнении A) определены
начальными условиями D).
В частности, по виду членов ряда в равенстве A), можно определить, что собственные
[круговые] частоты (в радианах в секунду) колебаний струны определяются формулой
птга ..
ип = -£-, E)
п = 1,2,3, — Они (и только они) являются значениями и, при которых уравнение B) имеет
установившееся периодическое решение вида
у(х, t) — Х(х) cos(u;t — 7), F)
которое удовлетворяет условиям в конечных точках C). Чтобы убедиться в этом, достаточно
подставить равенство F) в B) и сократить на множитель cos(u>£ — 7)» после чего будет ясно,
что X (ж) должно удовлетворять уравнению
а2Х"(х)+и2Х(х)=01
чье общее решение
Х(х) — A cos Ь В sin —
а а
удовлетворяетусловиям(З), только если А = Оио; = П7га/£длянекоторого положительного
целого числа п.
Вынужденные колебания и резонанс
Теперь предположим, что струна подвергается влиянию периодической внешней силы
F(t) = Fq cosut (сила на единицу массы), которая действует равномерно на струну по
всей ее длине. Тогда, согласно уравнению A) из раздела 9.6, смещение у(х, t) струны
удовлетворяет неоднородному дифференциальному уравнению в частных производных
||=,,*0 + F„CW, G)
а также граничным условиям, таким как условия C) и D). Например, если первоначально
струна находится в покое и в равновесии в тот момент, когда начинает действовать внешняя
сила, то мы хотим найти решение уравнения G), которое удовлетворяет условиям
у@, t) = y(L, t) = у(х, 0) = yt(x, 0) = 0. (8)
Чтобы сделать это, сначала достаточно найти частное решение ур(х, t) уравнения G),
которое удовлетворяет условиям C) (которые являются условиями для закрепленных концов
в конечных точках), а потом найти решение ус(х, t) в виде равенства A) для знакомой
задачи BН4) при
f{x) = -yp(x, 0) и g(x) = -Dtyp{x, 0).
Очевидно, тогда функция
y(x,t) = yc(x,t) + yp(x,t)
будет удовлетворять уравнениям G) и (8).
10,3. Установившиеся периодические решения ... 915
Так что наша новая задача состоит в том, чтобы найти yp(x,t). Изучение отдельных
слагаемых в уравнении G) подсказывает, что сначала нужно попробовать функцию
ур{х, t) = Х(х) cosut. (9)
Подставляя эту функцию в уравнение G) и сокращая на общий множитель cos wt, получаем
обыкновенное дифференциальное уравнение
a2X" + u;2X = -Fo
с общим решением
Х(х) = Л cos bBsin ^. A0)
а а и*
Из условия х@) = 0 следует, что А = Fq/uj2, а затем из X(L) = 0 следует, что
хщ^Ц (cos^_i) +jBsin^: = o. (ii)
or \ a / а
Теперь предположим, что частота и; периодической внешней силы не равна ни одной из
собственных частот шп = nna/L струны. Тогда sm(uL/a) Ф 0, так что мы можем решить
уравнение A1) относительно В и затем подставить результат в уравнение A0); в результате
получится
F0 / их \ F0[cos(u;L/a) -1] . их
Х{х) = — (cos 1) L ; ' ' sm—. A2)
При этом выборе Х(х) с учетом равенства (9) получим искомое частное решение ур(х, t).
Обратите внимание, однако, что когда значение ш стремится к иоп = ппа/Ь при нечетном
п, коэффициент sin(ujx/a) в уравнении A2) стремится к ±оо; таким образом, резонанс
действительно происходит. Это объясняет тот факт, что, когда оттянута [только] одна из
двух близлежащих идентичных струн, другая также начнет колебаться из-за того, что на
нее действует (посредством воздуха) внешняя периодическая сила на ее основной частоте
(частоте основной (первой) гармоники, (наинизшей) собственной частоте). Заметьте также,
что если и = ип == П7га/Ь при четном п, то мы можем выбрать В = 0 в уравнении A1),
так что в этом случае резонанс не происходит. Задача 20 объясняет, почему некоторые из
возможностей резонанса не реализуются.
Колебания струн типичны для непрерывных систем, которые имеют бесконечную
последовательность собственных частот вибрации. Когда периодическая внешняя сила действует
на такую систему, могут произойти потенциально разрушительные резонансные колебания,
если приложенная частота близка к одной из собственных частот системы. Следовательно,
предотвращение таких резонансных колебаний — важный аспект надлежащего
строительного проектирования.
Собственные частоты балок
На рис. 10.3.1 показана однородная балка длины L, зажатая в каждом конце. Ее линейная
плотность равна р, а модуль Юнга — Е. Для 0<а?<1/и£>0 функция, выражающая ее
отклонение у (х, t), удовлетворяет уравнению четвертого порядка
916 Глава 10. Собственные значения и краевые (граничные) задачи
Рис. 10.3.1. Стержень,
каждый конец которого зажат
которое мы обсуждали в разделе 10.2; I обозначает момент инерции поперечного сечения
балки вокруг ее горизонтальной оси симметрии. Поскольку и смещение, и наклон равны
нулю в каждом защемленном конце конструкции, условия в конечных точках имеют вид
y@,t) = V*@,t) = 0 A4)
и
y(L,t) = yx(L,t) = 0. A5)
Здесь мы хотим найти только собственные частоты колебаний балки, так что мы не будем
заниматься начальными условиями. Собственные частоты — это значения ш9 при которых
уравнение A3) имеет нетривиальное решение вида
у(х, t) = Х(х) cos(u;t — 7), A6)
которое удовлетворяет условиям, выраженным в равенствах A4)иA5). Когда мы подставим
у(х, t) из A6) в A3) и затем сократим на общий множитель cos(u;t — 7), мы получим
обыкновенное дифференциальное уравнение четвертого порядка —ио2Х 4- а4Х^ = 0;
иными словами,
ХD) - ^-гХ = 0. A7)
а4
Введя обозначение а4 = а;2/а4, мы записываем общее решение уравнения A7) в виде
Х{х) —A cosh ах Л- В sinh olx + C cos ax 4- D sin ax,
причем
X'{x) = a(A sinh ax + В cosh ax — С sin ax + D cos ax).
Условия A4) дают уравнения
Х@) = Л + С = 0 и Х;@) =<*(£ + £>) = 0,
из которых находим С = —А и D = —В. Следовательно, из условий A5) получаем
уравнения
X{L) = A(coshaL — cosaL) 4- B(sinhaL — sinaL) = 0
и
—X'(L) = A(smhaL 4- sin aL) 4- B(coshaL — cosaL) = 0.
10.3. Установившиеся периодические решения ... 917
Чтобы эти два линейных однородных уравнения относительно А и В имели нетривиальное
решение, детерминант из коэффициентов должен быть нулевым:
(coshaL — cos aLJ — (sinh2 aL — sin2 aL) = 0;
(cosh2 aL — sinh2 aL) -f (cos2 aL -J- sin2 aL) — 2 cosh aL cos aL = 0;
2 — 2 cosh aL cos aL = 0.
Отсюда следует, что /3 = aL должно быть отличным от нуля корнем уравнения
cosh х qos x = 1.
A8)
Из рис. 10.3.2 мы видим, что это уравнение имеет возрастающую последовательность
положительных корней {/Зп}^°. Теперь и = а2а2 == /32a2/L2 и а2 = у/Е1/р9 так что из
этого следует, что собственные [круговые] частоты колебаний балки с зажатыми концами
выражаются формулой
ft EI i
ип = yf \ — (радиан в секунду)
A9)
для п = 1,2,3,.... Корни уравнения A8) равны /Зг « 4,73004, /32 « 7,85320, /?3 ~ 10,99561
и/?п « Bn + 1Oг/2дляп ^ 4 (как показано на рис. 10.3.2),
L
-1
У
\^ "" cosh xf \
\ п /Pi 2л ДА
j = cos д:
ssdUs
Злг
/^"
""X
Jt
Рис. 10.3.2. Решения
уравнения cosh х cos x = 1
Пример 1
Предположим, например, что основной элемент конструкции моста —
стальная двухтавровая балка (балка двутаврового сечения) длиной 120
футов с поперечным сечением, показанным на рис. 10.3.3, имеет момент
инерции I = 9000 см4. Если мы подставим значения
£ = A20футш)(з0,48^), р = G,75 4j) D0см2),
и значения Ди^в уравнение A9), мы найдем, что две самые низкие
собственные частоты балки
ил «12,74
и2 « 35,13
радиан
секунда
радиан
секунда
.~~ колебаний \
122 и
C35;
минута )
колебаний \
минута /
918 Глава 10. Собственные значения и краевые (граничные) задачи
i \- 10 см—I
ШШШШШ-г
2 см I
Осм—|—
30 см
Рис. 10.3.3. Идеализированная
двухтавровая балка (балка
двутаврового сечения)
Если бы рота солдат, марширующих с частотой приблизительно 120 шагов
в минуту, приближалась бы к этому мосту, им пришлось бы обязательно
отдать приказ идти не в ногу перед переводом моста. Время от времени
мосты разрушаются из-за резонансных колебаний. Вспомните катастрофу
в гостинице города Канзас-Сити (Kansas City) в США 17 июля 1981 года,
в результате которой разрушилась танцплощадка, заполненная
танцорами. Газеты цитировали исследователей, которые размышляли о том, что
ритмичное движение балерин вызвало разрушительные резонансные
колебания в стальных двухтавровых балках (балках двутаврового сечения),
которые поддерживали танцплощадку. ■
Подземные колебания температуры
Давайте предположим, что подземная температура в каком-нибудь конкретном месте
является функцией и(х, t) времени t и глубины х ниже поверхности грунта. Тогда и удовлетворяет
уравнению теплопроводности щ — кихх, где к — коэффициент температуропроводности
грунта. Мы можем считать температуру гх@, t) на поверхности х = 0 известной из отчетов
о наблюдении погоды. И в самом деле, периодические сезонные колебания ежемесячных
средних температур на поверхности, максимум которых приходится на разгар лета (июль
в северном полушарии) и минимум на середину зимы (январь), очень близко напоминают
колебания по закону косинуса или синуса. Поэтому мы предположим, что
гх@, t) = To + А0 cos u;t, B0)
где мы полагаем t = 0 в разгар лета. Здесь Т0—средняя годовая температура, Ао—амплитуда
сезонных колебаний температуры, а ш выбрано так, чтобы период и @, t) был равен точно
одному году. (В единицах системы СГС (т. е. в единицах системы сантиметр-грамм-секунда),
например, ш было бы равно частному от деления 2-к на 31557 341 — число секунд в году.)
Разумно предположить, что температура на фиксированной глубине также изменяется
периодически с изменением t. Для удобства мы обозначим С/(ж, t) = u{x, t) — То. Тогда мы
интересуемся периодическими решениями уравнения теплопроводности вида
U(xyt) = А(х) cos(wt - 7) = V(x) cosoot + W(x) smut B1)
10.3. Установившиеся периодические решения ... 919
задачи
£/@,*) = А0 cos cut. B3)
Чтобы решить эту задачу, давайте рассматривать U(x, t) в равенстве B1) в качестве
вещественной части комплекснозначной функции
U{x,t)=X{x)eiujt. B4)
Тогда нужно, чтобы [/(#, t) удовлетворяла условиям
Ut = kUxx, B2')
U@,t) = Aoe^K B3')
Подставив равенство B4) в уравнение B2'),/Получим гсиХ = кХ"; т. е.
X" - а2Х = 0, B5)
где
а=±и=±{1+4^ Bб)
потому что \fi — ±A -f г)/л/2. Следовательно, общее решение уравнения B5) имеет вид
Х{х) = Аехр (-A + t)^vV2fc) и- В ехр (+(l + i)xyW2fc) . B7)
Чтобы функция U(x,t) и, следовательно, функция Х(х), была ограничена при х —► +оо,
необходимо, чтобы В = 0. Кроме того, из уравнений B3') и B4) мы видим, что А = Х@) =
= Ло. Так что
Х(х) = А0ехр (-A + i)xy/uj]2k\ . B8)
Наконец, решение нашей первоначальной задачи B2)~B3) имеет вид
U(x,t) = ReU(x,t) = ReX(x)eiujt =
* = Re < (Ao ехр (iotf) ехр (—A + i)x\/uj/2k) > —
= Re < Aq exp f — x\Juj2k) exp f i(ut — x^cj/2k).j >;
следовательно,
U(x, t) = Л0exp (-xy/w/2k\ cos (u;£ - xyju>/2k\ . B9)
920
Глава 10. Собственные значения и краевые (граничные) задачи
Таким образом, амплитуда А (х) колебаний годовой температуры затухает по
экспоненциальному закону — как функция глубины х она имеет вид
А(х) = Дзехр (— xyj(jj/2k\ .
C0)
Кроме того, есть фазовая задержка j(x) = Ху/ш/2кн& глубине х.
Пример 2
Пример 3
При к = 0,005 (типичное значение для грунта в единицах системы СГС
(т. е. в единицах системы сантиметр-грамм-секунда)) и ранее указанном
значении и мы находим, что у/оо/2к « 0,00446 см. Например, из
равенства C0) при наших предположениях мы видим, что амплитуда равна
половине амплитуды на поверхности, А(х) = |Ло при @,00446)ж =
= In 2; т. е. когда х «155,30 см «5,10 футов. Если Aq = 16°, то на глубине
приблизительно 20 футов амплитуда ежегодных колебаний температуры
равна всего лишь 1°, ■
Другое интересное следствие уравнения B9) — "инверсия времен
года", которая происходит при ^у(х) = @,00446)# = 7г; т. е. на глубине
х « 704,39 см, приблизительно 23,11 футов. На рис. 10.3.4 показан
график U = U{x, t) для 0 й х й Х9 0 й t й Т, где X равно 23 футам (но
метки нанесены в сантиметрах) и Т равно 2,5 года (хотя метки нанесены
в секундах). Внимательно посмотрите на правый край графика. Видите ли
54
i/ш
шд.
Жл
jS-КК
Щ1
200
400 х (СМ)
t (секунды х 107)
Рис. 10.3.4. График функции, задающей распределение температур С/(ж, i)
в уравнении B9)
10.3. Установившиеся периодические решения ... 921
вы, что температура на глубине 23 футов окажется максимальной тогда,
когда поверхностная температура минимальна? ■
10.3. Задачи
Однородный стержень длины L сделан из материала, плотность которого равна 6, а модуль Юнга
равен Е. В задачах 1-6 подставьте и(х, t) = X(x) cos wt в Sutt ~ Еихх и найдите собственные
частоты продольных колебаний стержня при двух заданных условиях на его концах х = 0 и х = L.
1. Оба конца фиксированы (защемлены).
2. Оба конца свободны.
3. Конец в точке х = 0 фиксирован (защемлен); конец в точке х — L свободен.
4. Конец в точке х = 0 фиксирован (защемлен); к свободному концу в точке х = L прикреплена
масса га, как в примере 2 из раздела 10.2.
5. Каждый конец свободен, но к концу в точке х = L прикреплена пружина с константой Гука к,
как в задаче 12 из раздела 10.2.
6. К свободным концам прикреплены массы гао и rai.
7. Предположим, что материальная точка заданной массы на свободном конце в точке а; = L
в задаче 4 прикреплена также к пружине из задачи 5. Покажите, что собственные частоты можно
вычислить по формуле шп = (pn/L)y/E/S, где {/Зп}™ — положительные корни уравнения
(тЕх2 — kSL2) sin х = MExcosx.'
(Примечание. Условие в точке х = L имеет вид mutt = —АЕих — ки.)
В задачах 8-14 рассматриваются поперечные колебания однородной балки из этого раздела, но
с различными условиями на концах. В каждом из случаев покажите, что собственные частоты
можно вычислить по формуле A9), где {Рп}^° являются положительными корнями данного
частотного уравнения. Вспомните, что у = у' = 0 в защемленном конце конструкции, у = у" = 0
в подвешенном (или шарнирно закрепленном) конце и у" = у^3' = 0 в свободном конце (штрихи
обозначают производные по х).
8. Оба конца в точках х = 0 и х = L защемлены; частотное уравнение имеет вид sin x = 0, так
что (Зп = тт.
9. Конец в точке х = 0 защемлен, а конец в точке х = L подвешен (или закреплен на шарнире);
частотное уравнение имеет вид tanh х = tg x.
10. Балка представляет собой консоль с защемленным концом в точке х = 0и свободным концом
в точке х = L; частотное уравнение имеет вид cosh x cos х = — 1.
11. Конец в точке х = 0 защемлен, а конец в точке х = L присоединен к вертикально скользящему
зажиму, так что на этом конце у' = г/3^ = 0; частотное уравнение имеет вид tanh x + tg x = 0.
12. Консоль из задачи 10 имеет полную массу М = pL, причем к ее свободному концу прикрепили
массу га; частотное уравнение имеет вид
МA + cosh х cos я) = rax(coshx sin x — sinhx cos x).
Условия в точке x — L имеют вид ухх = 0 и туи = Е1уххх.
13. Свободный конец в точке х = L консоли из задачи 10 прикреплен (как на рис. 10.3.5) к пружине
с константой Гука к; частотное уравнение имеет вид
Е1х3 A + cosh х cos x) = kL3 (sinh x cos x — cosh x sin x). .-**•■•
Условия в точке x — L имеют вид ухх — 0 и ку = Е1уххх.
922 Глава 10. Собственные значения и краевые (граничные) задачи
:ШШШШйШ&Ш§ШШШШМ
Рис. 10.3.5. Консоль из
задачи 13
14. Предположим, что материальная точка массой т на свободном конце консоли из задачи 12
присоединена к пружине из задачи 13. Условия в точке х = L имеют вид ухх = 0 и туи =
= Elyххх — ку. Получите частотное уравнение
MEIx3(l + cosh х cos x) = (kML3 — mEIx )(sinhx cosx — cosh x sin x).
Обратите внимание, что частотные уравнения в задачах 12 и 13 являются частными случаями
этого уравнения при к = 0 и т — 0 соответственно.
15. Предположим, что консоль из задачи 10 представляет собой трамплин для прыжков,
сделанный из стали с плотностью S = 7,75 г/см3. Трамплин для прыжков имеет длину 4 м, а его
поперечное сечение представляет собой прямоугольник шириной а = 30 см и толщиной 6 = 2
см. Момент инерции этого прямоугольника вокруг его горизонтальной оси симметрии равен
I = j^ab3. Учитывая, что наименьший положительный корень уравнения coshx cos x = — 1
равен /3i «Д,8751, определите частоту (в герцах), с которой человек должен подпрыгивать
вверх и вниз на конце трамплина для для максимального (резонансного) эффекта.
16. Если однородный стержень, подвешенный в каждом конце, подвергается осевой силе сжатия
Р, то его поперечные колебания удовлетворяют уравнению
д*у д*у д*у
Покажите, что его собственные частоты выражаются формулой
_ nV / PL2 \
U}n~ L* V1 nWEIJ
1/2 'EI
для п = 1, 2, 3, Обратите внимание, что при Р = 0 полученная формула приводит
к результату в примере 3 из раздела 10.2 и что при Р > 0 должно увеличиваться значение
каждого из cjn.
17. Балка, подвешенная в каждом конце достаточно толста, так что должна быть принята во
внимание ее кинетическая энергия вращения. В этом случае дифференциальное уравнение ее
поперечных колебаний имеет вид
д*у I д*у д*у
Pdt2 Adx2dt2 ^ дх4
Покажите, что ее собственные частоты можно вычислить по формуле
-2„,2 / „2„2г\ -1/2
П27Г2 / П27Г2А- ' [Ш
для п = 1, 2, 3,
18. Предположим, что конец х = 0 однородного стержня с поперечным сечением площади А
и модулем Юнга Е защемлен, в то время как продольная сила F(t) = Fo sinwt действует на
10.3. Установившиеся периодические решения ... 923
его конец х = L, так что AEux(L, t) — Fo sin wt. Выведите, что установившееся периодическое
решение имеет вид
, ,ч Foasin(o;x/a)sina;t
щх,г) = ————' ' .
19. Снова решите задачу 18, однако теперь поперечная сила F(t) = Fo sincjt действует на
свободный конец х = L, так что
У XX (L, t) — EIyxxx(L, t) + Fo smut = 0.
Найдите устойчивые периодические поперечные колебания консоли в виде у{хьЬ) —
= X(x)smu)t.
20. На струну с защемленными концами действует периодическая сила F(x,t) = F(x)sm.(jjt (на
единицу массы), так что
Подставьте
уи = а2ухх 4- F(x) sincjt.
у(х, t) = 2_. °ri sin -y~ sin u>t
^0*0 = Z^ F" sin ~^-
n=l
и получите формулу установившегося периодического решения
, ,ч v^ Fn $т(п7гх/а) sin ut
где a;n = nna/L. Следовательно резонанс не произойдет, если ш = и;п, но Fn = 0.
21. Предположим, что на струну из задачи 20 действует также сила сопротивления воздуха,
пропорциональная скорости струны, так что
Уи = а2ухх -cyt + F(x) sincjt.
Обобщите метод задачи 20, чтобы получить установившееся периодическое решение
оо
у(х, t) — ^2 PnFn sin ~~F~ sinM - <*п),
где
Г/ 2 2\2 , 2 2-1-1/2
И
an = axctg — -.
и>\ -и2
Обратите внимание на сходство с затухающим вынужденным движением материальной точки
заданной массы на пружине.
22. Телефонное уравнение для напряжения е(х,£) в длинной линии передачи в точке х ^ 0
в момент времени t имеет вид
Q = LC§ + (RC + LG)ft+RGe,
где R, L, G и С обозначают сопротивление, индуктивность, проводимость и емкость (все на
единицу длины линии) соответственно. Условие е@, t) = Ео cos utt представляет
периодическое сигнальное напряжение в начале координат линии передачи в точке х = 0. Предположите,
924 Глава 10. Собственные значения и краевые (граничные) задачи
что e(x,t) ограничено при х —► +оо. Подставьте e(x,t) = E(x)et(JJt и получите
установившееся периодическое решение
e(x,t) = Еое~ах cos(ujt — /Зх),
где а и /3 — соответственно вещественная и мнимая части комплексного числа
[(RG - LCuj2) + iu(RC + LG)]1/2 .
23. В точке ж^Ов момент времени £ температура и(х, £) воды, двигающейся со скоростью 7 = 0
в длинном канале удовлетворяет уравнению
ди _ K#2w ди
~Ш~ ch? ~1~дх~'
Предположим, что и@, t) = Ao cos u>t и что u(x,t) ограничена при х —► +оо. Подставьте
u(xyi) = X(x)etu}t и получите установившееся периодическое решение
u(x;t) = Аое^<31Х cos(u>t — /Зх),
где
/5=^G4 + 16^2I/4sin| и
<£ = arctg—.
72
Покажите также, что при 7 = 0 это решение приводит к решению, выраженному
равенством B9).
10.3. Приложение. Колебания балок и трамплины
для прыжков
В этом проекте вы должны продолжить исследование поперечных колебаний упругого
стержня или балки длиной L, чья функция, выражающая положение y(x,t)9 удовлетворяет
дифференциальному уравнению в частных производных
d2v д4у
pw+EI-d=° ^<х<^
и начальным условиям у(х, 0) = /(#), Vt(x, 0) = 0.
Сначала отделите переменные (как в примере 3 из раздела 10.3), чтобы получить
формальное решение в виде ряда
y(x,t) = ]Рсп [COS-j2~) Хп(х),
п=1 ^ '
где а4 = Е1/р, {сп} — соответствующие коэффициенты разложения по собственным
функциям начальной функции /(#), выражающей положение, а {/Зп}^° и Хп(х) определены
10.3. Установившиеся периодические решения ... 925
условиями на концах, наложенными на стержень. В данном случае мы хотим найти не
только частотное уравнение, положительные корни которого равны {/?п}^°, но и собственные
функции {Хп(х)}. В этом разделе мы видели, что частотное уравнение для случая, когда
защемлены оба конца (при у@) = у'@) = y(L) — y'{L) = 0), имеет вид cosh x cos ж ?= 1.
Это уравнение можно решить с помощью методов, применяемых в компьютерных
системах, —эти методы подобны проиллюстрированным в приложениях для разделов 10.1 и 10.2;
в таблице на рис. 10.3.6 перечислены первые десять положительных решений (корней)
{/Зп} \°. Вычисления, предшествующие уравнению A8) в этом разделе, показывают, что п-я
собственная функция в данном случае дается формулой
Хп(х) = Ап ( cosh -у cos -у—
+ Вп I sinh
/Зпх
sm— j,
где отношение Ап/Вп определяется из условия в конечной точке Xn(L) = 0. Графики
первых трех из этих собственных функций приведены на рис. 10.3.7, который был вычерчен
для 120-футовой стальной двухтавровой балки из этого раздела при условии, что каждый
коэффициент Ап = 1 и L = 3657,6 см. То, что оказалось, что каждый график (как и должно
быть), имеет нулевой наклон в обеих конечных точках, служит подтверждением вычислений,
которые использовались для генерации рисунка.
Следующие случаи описывают другие модели колебаний балки, которые вы
самостоятельно можете исследовать подобным способом.
|§§§Я§§
1
2
3
4
5
6
7
8
9
10
4,7300
7,8532
10,9956
14,1372
17,2788
20,4204
23,5619
26,7035
29,8451
32,9867
Рис. 10.3.6. Первые 10
положительных корней уравнения
собственных значений cosh x cosx = 1
для колеблющейся балки с
фиксированными (защемленными) концами
Рис. 10.3.7. Графики первых
трех собственных функций
у = Хп(х) для двутавровой
балки с фиксированными
(защемленными) концами
Случай 1. Балка подвешена (или шарнирно закреплена) на
каждом конце
Граничные условия имеют вид
y(p) = y"(P) = y(L) = y"(L) = 0.
926 Глава 10. Собственные значения и краевые (граничные) задачи
Согласно задаче 8, частотное уравнение имеет вид sin х = 0, так что 0п — птг и Хп(х) =
= sinmrx. Предположим, что стержень сделан из стали (с плотностью 6 = 7,75 г/см3
и модулем Юнга Е = 2 х 1012 дин/см2), причем его длина равна 19 дюймам, а квадратное
поперечное сечение имеет сторону w = 1 дюйм (так что его момент инерции равен I =
= j^w4). Определите первые несколько собственных частот его колебаний (в Гц). Как
звучит этот стержень, когда он колеблется?
Случай 2. Каждый конец свободен
Граничные условия имеют вид
y»@) = yW@) = y"(L)=yW(L) = 0.
Этот случай моделирует, например, невесомый стержень, подвешенный в пространстве
в орбитальном космическом корабле. Теперь покажите, что частотное уравнение имеет вид
coshx cosx = 1 (хотя собственные функции отличаются от собственных функций для
случая защемленных обоих концов). Решите это уравнение (графически или численными
методами, как показано в приложении к разделу 10.2), чтобы найти приближения для первых
нескольких собственных частот колебаний того же самого стержня, который был рассмотрен
в случае 1. Как этот стержень звучит теперь?
Случай 3. Конец в точке х = 0 защемлен, а конец в точке х = L
свободен
Теперь граничные условия имеют вид
у@) = i/@) = y"(L) = y<3>(L) = 0.
Это консоль, подобная трамплину для прыжков, показанному на рис. 10.3.8. Согласно
задаче 15, частотное уравнение имеет вид cosh x cos х = — 1. Найдите приближения для первых
нескольких положительных решений (корней) этого уравнения и покажите графически, что
Рп «Bга — 1Oг/2 для га больших. Таким образом определите первые несколько собственных
Рис, 10.3.8, Наиболее
захватывающие прыжки в воду
определены частотным уравнением
для случая 3
10.4. Задачи в цилиндрических координатах 927
частот (в Гц) колебаний трамплина для прыжков* рписаннош в задаче 1*5. Это те частоты, на
которых ныряльщик на этом трамплине должен прыгать вверх и вниз на свободном конце
для достижения максимального резонансного эффекта.
10.4. Задачи в цилиндрических координатах
Преобразовав лапласиан V2u = ихх + иуу + iizz функции и = y(x,&z) подстановкой # =
= г cos в,у = г sin 0, получим выражение лапласиана в цилиндрических координатах,
v u~~dr> +rdr + r*do* + dz*' ()
В качестве типичного приложения рассмотрим очень длинный однородный твердый
цилиндр радиуса с, ось которого совпадает с осью z. Предположим, что первоначально он
нагрет, причем его начальная температура зависит только от расстояния г от оси z, а в
момент времени i = 0 на его поверхности г — с выполняется условие
(PlU + faUr)
0. B)
Обратите внимание на следующие частные случаи для уравнения B).
• Оно сводится к условию и — 0, если C\ = 1 и 02 = 0.
• Оно сводится к условию изоляции иг — 0, если 0\ — 0 и 02 = 1.
• Оно сводится к условию теплообмена hu + ur = 0, если 0i = h и 02 = 1.
Разумно ожидать, что температура и в пределах цилиндра в момент времени t зависит только
от г, так что мы пишем и — гл(г,£). Тогда и#0 = uzz = 0, так что подстановка A) в уравнение
теплопроводности щ = к^72и приводит к граничной задаче
ди , (д2и 1ди\ , л ЛЧ
> 01u(c,t) + 02ur(c,t) = O, D)
гх(г, 0) = /(г) (начальная температура). E)
Чтобы решить эту задачу методом разделения переменных, мы подставляем
u(r, *) = R(r)T(t)
< в уравнение C); таким способом мы получаем уравнение
RT' = k(R"T+-R'T\.
Деление на kRT приводит к равенству
R!'^B!/t Г
F)
R кТ
= -А: G)
928 Глава 10. Собственные значения и краевые (граничные) задачи
Следовательно, функция R(r) должна удовлетворять уравнению
R" + - В! + АД = 0, (8)
г
а также уравнению /3iR(c) + foR'ic) = 0, которое следует из уравнения D). Кроме того, из
уравнения
Т' = -ХкТ
следует, что T(t) = e~Xkt с точностью до постоянного числового множителя. Поскольку
коэффициент диффузии к положителен, из этого следует, что Л должно быть неотрицательным,
если T(t) ограничено при t —► 4~оо, как требуется в данной физической задаче, моделью
которой являются уравнения C)-E). Мы поэтому пишем А = а2, так что уравнение (8)
принимает вид
r2R" + tR' + a2r2R = 0. (80
Особая (сингулярная) задача Штурма-Лиувилля
Уравнение (8') при х = г и у(х) = R(r) представляет собой параметрическое уравнение
Бесселя
х2у" + ху1 + а2х2у = 0 (9)
нулевого порядка, которое мы обсуждали в разделе 8.5. Вспомните, что более общее
параметрическое уравнение Бесселя
> х2у" + ху1 + (а2ж2 - п2)у = 0 A0)
имеет общее решение
> • у(х) = AJn(ax) + BYn{ax), (l 1)
если а > 0. После деления на х уравнение Бесселя A0) принимает вид уравнения Штурма-
Лиувилля
дляр(ж) = х, q(x) = п2/х, г(х) = х и Л = а2. Мы хотим определить те неотрицательные
значения Л, при которых существует решение уравнения A2) на интервале @, с), которое
является непрерывным {вместе со своей производной dy/dx) на замкнутом интервале [0, с]
и удовлетворяет условию в конечной точке
РМе) + (hy'(c) = 0, A3)
где хотя бы одно из чисел /3i и 02 отлично от нуля.
Задача Штурма-Лиувилля, связанная с уравнениями A2) и A3), является особой
(сингулярной), потому что р@) = г@) = 0 и q(x) —► -f оопри х —► 0+, тогда как в теореме 1 из
раздела 10.1 считалось, что функции р(х) и г (х) положительны и q(x) непрерывна на всем
интервале. Эта задача также не соответствует шаблону из раздела 10.1, поскольку никакое
условие, подобное A3), не наложено в левой конечной точке х = 0. Однако требование, что-
10.4. Задачи в цилиндрических координатах 929
быу(х) была непрерывна на интервале [0, с] как раз и играет роль такого условия. Поскольку
Уп(х) —> — оо при х —> 0, решение, выраженное равенством A1) для а > 0, может быть
непрерывным в точке х = 0, только если Б = 0, так что
у(х) = Jn(ax) #
с точностью до постоянного числового множителя. Остается только наложить условие в
точке х = с, выраженное в уравнении A3).
Удобно различать случаи fa = 0 и /?2 ф 0. Если /Зг = 0, то уравнение A3) принимает
простую форму
> У(с) = 0. A3а)
Если $2 т^ 0, мы умножаем каждую часть уравнения A3) на с/ fc и затем полагаем h =
= c/?i //?2; в результате этого получаем эквивалентное условие
> hy(c)+cy'(c) = 0. A3b)
Мы принимаем после этого, что h ^ 0.
Случай 1: А = О. Мы сначала рассматриваем возможность нулевого собственного
значения А = 0. Если Л = 0 и п = 0, то уравнение A2) приводит к уравнению (ху')' = 0
с общим решением
у(х) = А\пх + В,
а из непрерывности на [0, с] следует, что А = 0. Но тогда из уравнения A3а) следует, что
также и В — 0; то же самое следует и из уравнения AЗЬ), если только неверно, что h = 0, но
в этом случае Л = 0 — собственное значение, которому соответствует собственная функция
у(х) = 1.
Если Л = 0, но п > 0, то уравнение A2) просто превращается в уравнение
х2у" + ху' — п2у — 0
с общим решением (подставьте пробное решение у — хк, как в разделе 9.7)
у{х) = Ахп + Вх~п,
а из непрерывности на [0, с] следует, что В = 0. Но просто проверить, что у (х) = Ахп не
удовлетворяет ни уравнению A3а), ни уравнению A3Ь), если неверно, что А = 0. Таким
образом, Л = 0 не является собственным значением, если п > 0. Мы поэтому показали,
что Л = 0является собственным значением задачи A2)-A3) тогда и только тогда, когда
п = h = 0 и условие в конечной точке х — с имеет вид у'(с) = 0, а в этом случае
соответствующая собственная функция имеет вид у(х) = 1. В этом случае мы пишем
Л0 = 0 и уо(х) = 1.
Случай 2: А > О. Если Л > 0, то Л = а2 > 0, и в этом случае единственное
решение уравнения A2), которое является непрерывным на [0, с], с точностью до постоянного
числового множителя имеет вид
у(х) = Jn(ax).
930 Глава 10. Собственные значения и краевые (граничные) задачи
Тогда из уравнения A3а) следует, что Jn(ctc) = 0; другими словами, ас должно быть
положительным корнем уравнения
> Jn(x) = 0. A4а)
Вспомните из раздела 8.5, что графики Jo (х) и J\ (х) выглядят так, какпоказано на рис. 10.4.1.
График Jn(x) для п > 1 напоминает график Ji(x), даже в той детали, что Jn@) = 0.
В частности, для каждого п = 1,2,3,..., уравнение A4а) имеет возрастающую бесконечную
последовательность {7nfc}fcli положительных корней, такую что jnk —► +оо при к —► +оо.
Эти корни для п й 8 и к ^ 20 даются в таблице 9.5 справочника по специальным функциям
М. Абрамовича и И. Стиган (Abramowitz and Stegun, Handbook of Mathematical Functions).
Рис. 10.4.1. Графики функций Бесселя
Jo (ж) и Ji(x)
Есшу(х) = Jn(ax)9TaK4Tody/dx = aJ'n (ах), то из уравнения A3Ь) следует, что
hJn(ac) -h acJ'n(ac) = 0,
т. е. что ас — положительный корень уравнения
> hJn(x)+xJ^(x)=0. A4b)
Известно, что это уравнение также имеет возрастающую бесконечную последовательность
{7nfc}fcli положительных корней, расходящихся к +оо. Если h = 0, то уравнение A4Ь)
приводит к уравнению J'n (x) = 0; корни этого уравнения приведены в таблице 9.5 справочника
по специальным функциям М. Абрамовича и И. Стиган (Abramowitz and Stegun, Handbook
of Mathematical Functions). В важном случае п = 0 первые пять корней уравнения A4Ь) для
различных значений h могут быть найдены в таблице 9,7 того же самого справочника.
Если выполняется какое-либо из граничных условий в равенствах A3а) или AЗЬ), то fc-e
положительное собственное значение равно
> \k - -у,
где мы обозначаем через 7* fc-й положительный корень соответствующего уравнения A4а)
или A4Ь); соответствующая собственная функция имеет вид
10i4^ Задачи в цилиндрических координатах
931
в конечной точке
Собственные значения
^Соответствующие
собственные функции
Случай 1:
у(с) = О
Случай 2:
%(с) + с^(с) = 0;
хо!я бы одно из чисел h
или п отлично от нуля
Случай 3:
У'{с) = О,
71 = 0
Afc=7i/c2;
{lk}x положительные корни
уравнения Jn(x) = 0
{7fc}i° полсвкительные корни
уравнения hJn(x) + xJ'n(x) = 0
Ао = 0, Хк = т^/с2;
{7fc}i° положительные корни
уравнения Jq(#) = 0
Ук{х) = Лг,( —J
2/fc(x) = Jn (—)
2/о (ж) = 1,
ук{х) = Jo (IM)
Рис. 10.4.2. Собственные значения исобственные функции особой (сингулярной)
задачи Штурма-Лиувилля
dx
dy_
dx
-у 4- Хху = 0, fliy(c) ■+■ 02у'(с) = 0 на интервале [0, с]
В таблице на рис. 10.4.2 приведены итоги нашего исследования, они могут пригодиться
для справки. Исключительный случай п = h = 0, соответствующий условию в конечной
точке г/(с) = 0, рассмотрен отдельно. Мы обсудили только неотрицательные собственные
значения, но может быть доказано, что задача A2)-A3) не имеет отрицательных
собственных значений. (См. раздел 78 3-го издания книги Черчилла и Брауна, посвященной рядам
Фурье и граничным (краевым) задачам. Эта книга бь!ла издана в Нью-Йорке в 1978 году:
R. V. Churchill and J. W. Brown, Fourier Series and Boundary Value Problems, 3rd ed. (New
York; McGraw-Hill* 1978).)
Ряды Фурье-Бесселя
Теперь, когда мы знаем, что особая (сингулярная) задача Штурма-Лиувилля A2)-( 13) имеет
бесконечную Последовательность собственных значений и соответствующих им
собственных функций, подобных таковым из регулярной задачи Штурма-Лиувилля, мы можем
обсудить разложения по собственным функциям. В случае 1 и в случае 2 из рис. 10.4.2 мы
ожидаем, что кусочно гладкая функция f(x) на [0, с] будет разлагаться в ряд по собственным
функциям вида
Дя) = 5^ Скук(х) = ^CkJn ( —) »
к=1
к=\
A5)
в то время как в исключительном случае 3 ряд будет также содержать постоянный член со,
соответствующий Ао == 0, уо (х) = 1. Если справедливо заключение теоремы 2 из раздела 10.1
932 Глава 10. Собственные значения и краевые (граничные) задачи
(несмотря на то, что ее условия не удовлетворяются), то собственные функции
Jn(^), к = 1,2,3,...
должны быть ортогональны на [0, с] с весовой функцией г(х) = х. Действительно, если мы
подставим р(х) = r{x) = x и
»(х) = .7»(^), y'k(x) = ^j>(lf)
в уравнение B2) раздела 10.1, в результате получим
(А, - A;) J°xJn B£) Jn B£) dx =
= ъМъЖШ - ъМъЖЫ- A6)
Ясно, что величины, стоящие в равенстве A6), равны нулю, если 7г и jj — корни
уравнения A4а), Jn(x) = 0, но если они являются корнями уравнения A4Ь), это равенство
сводится к
Jn{li) [-hJnDj)] ~ Jn{lj) {-hJn{li)] = 0.
Таким образом, в любом случае мы видим, что если г ф j, то
TxJn(^)jn(?£-)dx = 0. A7)
Это есть условие ортогональности с весовой функцией г(х) = х. Так что теперь мы
должны определить коэффициенты в разложении в ряд по собственным функциям в
равенстве A5). Если мы умножим каждый член в уравнении A5) на xJn{^kxjc) и затем проинте-.
грируем почленно, мы получим
fV(*)J„ (^) dx = f> JCxJ„ (?f) Jn (?f) dx =
= ck^x[jn(^f)]2dx
с учетом равенства A7). Следовательно,
xf(x)Jn(^kx/c)dx
> ск = ^ -—. A8)
x[Jn{^kx/c)J dx
Jo
Если коэффициенты вычисляются по этой формуле, ряды вида, данного в равенстве A5),
часто называются рядами Фурье-Бесселя. Известно, что ряд Фурье-Бесселя для кусочно
гладкой функции f(x) удовлетворяет заключению о сходимости теоремы 3 из раздела 10.1.
Иными словами, он сходится к среднему \ [/(ж-Ь) -Ь /(#—)] в каждой точке @, с) и,
следовательно, к значению f(x) в каждой точке непрерывности внутри этого интервала.
10.4. Задачи в цилиндрических координатах 933
Коэффициенты Фурье-Бесселя
Несмотря на свою устрашающую внешность, интегралы, стоящие в знаменателе в
равенстве A8), вычислить совсем нетрудно. Предположим, что у(х) = Jn(ax)9 так что у{х)
удовлетворяет параметрическому уравнению Бесселя порядка п
d_
dx
dx
+ (a2x - IL J у = 0. A9)
Умножая это уравнение на 2ху1(х) и интегрируя по частям (задача 10), мы можем легко
получить формулу
2а2 Г х [Jn(ax)]2 dx = о?с2 [J'n{ac)\2 + {а2с2 - п2) [Jn(ac)J .
Jo
B0)
Теперь предположим, что а = 7fc/c> гДе 7fc ~ корень уравнения Jn(x) = 0. Мы применяем
равенство B0), а также рекуррентную формулу
xJ'n{x) = nJn(x) - xJn+1(x)
из раздела 8.5, и выводим, что J4Gfc) = ~ Jh+i (lk)- В результате получаем
Iх lJn (-f-)}2^ = 7 [J"Gfe)]2 = 7 tJ»+1b)]2 • BD
Другие строки в таблице на рис. 10.4.3 следуют подобным образом из равенства B0). Ряды
Фурье-Бесселя при п = 0 самые общие (задача 9). Далее перечисляются формы, которые
эти ряды принимают в рассмотреных нами трех случаях.
{7й}Г Цаямшшггеяьные корни
уравнения
Случай 1:
Мх) = 0
Случай 2:
hJn(x) + xJfa) = 0
(хотя бы одно из чисел п или h отлично от нуля)
Случай 3:
Л(х) = 0
тщттщтттштшвттттщттттяттшттттщттттттттттвтттят
Значение Г х jjn (——)]*' dm
|[^+iGfe)]2
**-£ + *) [Jnbh)],
\ [Jobk)]2
Рис. 10.4.3.
934 Глава 10. Собственные значения и краевые (граничные) задачи
Случай 1 при п = 0. Если {7fc}fcli — положительные корни уравнения Jo(x) = 0, то
оо
/(*) = $>Jo (^) ;
к=1
Ск= 2 Г г! МЗ ГХ/^7° (^Г) dX' B2)
c2[Ji(jk)Y к ■ V с /
Случай 2 при п = О. Если {7fc}fcLi — положительные корни уравнения hJo(x) +
+ xJq(x) = О, причем h > О,то
оо
v2
ск = = — о Гж/(жOо (—) dx. B3)
Случай 3. Если {7fc}^l1—положительные корни уравнения Jq(x) = 0, то (задача 10)
оо
/(в) = со + J2 ckJo (—) ; B4а)
fc=i c
со = ^ I xf(x)dx, B4b)
с* = 2ГТ2, м2 Гх/(ж) J° ("Г1) **• B4с)
c2[^oGfc)] Jo v c y
Приложения
Пример 1
Предположим, что длинный круговой цилиндр радиуса с имеет
начальную температуру u(r, 0) = щ (константа). Найдем tx(r, t) в каждом из
следующих трех случаев:
(a) и (с, t) = 0 (нулевая граничная температура);
(b) граница цилиндра изолирована, так что глг (с, t) = 0;
(c) теплообмен происходат на поверхности цилиндра, так что
Hu{c,t) + Kur(c,t) = 0, где Я > 0, К > 0.
Решение Полагая м(г, £) = R(r)T(t)9 мы раньше видели, что А = а2 > 0 в
уравнении G), так что
г2 R" + гй' + a2r2 R = 0 B5)
и
Т1 = -a2fcT. B6)
10.4. Задачи в цилиндрических координатах 935
Уравнение B5) -^ параметрическое уравнение Бесселя нулевого порядка,
его единственные непрерывные нетривиальные решения на [0, с] имеют
вид
R(r) = AJ0(ar), B7)
но возможные значения а зависят от наложенных граничных условий.
Случай (а): нулевая граничная температура. Условие и (с, t) = 0
дает R(c) = A Jo (ас) — 0, так что ас должно быть одним из корней
{7fc}fcli уравнения Jq(x) = 0. Таким образом, собственные значения
и собственные функции имеют вид
г?
С
для п = 1,2,3, Тогда из уравнения
ч/2
Л„ = ^|, Rn(r) = J0(^f) B8)
К = - (f) кТп
следует, что
Г„(*) = ехр(-^)
с точностью до постоянного множителя. Следовательно, ряд
„(r,t) = f^expT-^W2^) B9)
П=1 ^ '
формально удовлетворяет уравнению теплопроводности и граничному
(краевому, предельному) условию и(с, t) = 0. Поэтому остается выбрать
коэффициенты так, чтобы
оо
u(r,0) = ^cnJ0 (-^J =^o-
n=l
Поскольку Jo Gn) = 0, уравнение B2) дает
2гх0
Г7п
^ЧыгГ^)*-
= xJo(x) dx =
7^[ЛGп)]2 Jo
2 Г 7? N^HlH
7Й[ЛGп)]
7п
2и0
7пЛGп)'
Здесь мы использовали интеграл
ЪJq(x) dx = a:Ji(x) 4- С
936 Глава 10. Собственные значения и краевые (граничные) задачи
Подставляя коэффициенты {сп} в уравнение B9), мы, наконец, получаем
* ° -2щ S жехр №> * (¥) • (зо>
Благодаря присутствию экспоненциального множителя для числовых
вычислений обычно необходимы только несколько членов ряда. Данные,
требуемые для первых пяти членов, указаны на рис. 10.4.4. Например,
предположим, что цилиндр имеет радиус с = 10 см, сделан из железа
с коэффициентом температуропроводности А: = 0,15, а начальная
температура повсюду равна uq = 100° С. Тогда, поскольку Jo@) = 1,изуравне-
ния C0) мы находим, что температура на его оси (г = 0) через две минуты
(t = 120) будет равна
и@,120) = 200 ]Г ехр(-[0,18Ы) «
n=l inJl\in)
» 200 • @,28283 - 0,00221 + 0,00000 );
таким образом, м@,120) будет приблизительно равно 56,12° С.
»_ 7» Л(*Уп)
1
2
3
4
5
2,40483
5,52008
8,65373
11,79153
14,93092
+0,51915
-0,34026
+0,27145
; -0,23246
+0,20655
Рис. 10.4.4. Корни уравнения
Ml) = 0
Случай (Ь): изолированная граница. В этом случае теплота никогда
не рассеивается из горячего цилиндра, так что в конце концов мы должны
найти, что его температура остается постоянной: и(г, Ь) = щ.
Поскольку из ur(c, t) = 0 следует, что Rf{c) = 0, мы имеем п = h = 0 в
уравнении A4Ь), и, следовательно, случай 3 на рис. 10.4.2. Поэтому Ло =
0—собственное значение с соответствующей собственной функцией Rq (г) = 1.
Соответствующее решение уравнения B6) имеет вид T0(t) = 1.
Положительные собственные значения снова выражаются формулой B8), за
исключением того, что теперь числа {7n } i° ~~ положительные корни
уравнения Jq(x) = 0. Поэтому решение имеет вид
u(r,t) = со + f>„exp (-^f) Л) (^г) ,
П=1 ^ '
10,4. Задачи в цилиндрических координатах 937
и мы хотим, чтобы
и(г, 0) = со 4- ^2 CnJ° (~у = u°-
п=1
Но теперь в случае 3 формулы для коэффициентов в B4) дают
2 Г 2и0 [1 2Г
со = ~2 ги0аг= —J- -г = и0;
с2 Jo . с2 [2 J0
^[ЛэЫ] Jo V с У 7^[Л.Gп)] Jo
i* [а^Г = 2^Ы=0;
InlMln)} L JO 7n[JbGn)]
потому что JiGn) = — Jdiln) = 0. Таким образом, мы находим, что
u(r, t) = uo, как и ожидалось.
Случай (с): теплообмен на границе. Подстановка R(r) = Jo (or)
в граничное (краевое, предельное) условие HR(c) + KR'(c) = 0 дает
уравнение
Я Jo (ас) + # а Jo (ас) = 0,
которое принимает вид
h Jo (ас) + ас Jo (ас) =0 C1)
при h = сН/К > 0. Сравнивая уравнение C1) с уравнением A4Ь), мы
видим, что мы имеем случай 2 на рис. 10.4.2 при п = 0. Следовательно,
собственные значения и соответствующие собственные функции
выражаются формулами
A„ = ^f, Rn(r) = Jo {^pj , C2)
где {7n}i° — положительные корни уравнения hJo(x) 4- xJ'0(x) = 0.
Теперь Т' = —ХкТ как и прежде; следовательно, решение имеет вид
u(r,t) = f>nexp (-^) Jo (*f) , C3)
П=1 ^ '
и уравнение B3) дает
2г*о72
сп =
c2G2+/l2)[J0Gn)]2Jo V С У
2^о Гп т / ч , 2w07nJiGn)
J'7n «
# Jn(#) dx =
о . ы
G2 +Л2) [Л>ЫГ Jo . .(ll + h*)[John)}
2'
938 Глава 10. Собственные значения и краевые (граничные) задачи
Следовательно,
Пример 2
ф, t) = 2щ V 71Ы 2 ехр (-Щ Jo (Щ . C4)
Предположим, что на гибкую круговую мембрану радиуса с, совеша-
ющую колебания, действует сила растяжения Т таким способом, что ее
[нормальное] смещение и зависит только от времени t и расстояния г от ее
центра. (Так дело обстоит трк радиальных колебаниях,.) Тогда и = u(r, t)
удовлетворяет дифференциальному уравнению в частных производных
д2и
dt2
*= aAV*u = a
_ 2 ( д2и 1 ди
V 9r2 r дг
О-
C5)
где а2 = Т//0 и м (с, £) = 0, если граница мембраны фиксирована. Найдем
собственные частоты и. нормальные моды радиальных колебаний
мембраны.
Решение Мы применяем метод раздела 10.3. Подстановка функции u(r,t) =
= R(r) sin ujt в уравнение C5) дает
-и2R sin u)t = a2 I R" sin cut + -R'sinut) .
Таким образом, и и R(r) должны удовлетворять уравнению
г2Д" + гД' + ^r2R = 0,
or
72
C6)
а также условию R(c) = 0, которое следует из и(с, t) = 0.
Уравнение C6) — параметрическое уравнение Бесселя нулевого порядка с
параметром а = и;/а, и его единственное нетривиальное решение (с
точностью до постоянного числового множителя) имеет вид
R(r) = Jo ( — J ; следовательно, R(c) = J0 ( — J =0,
а потому ис/а должно быть одним из положительных корней {7n}i°
уравнения Jo (х) = 0. Таким образом, n-я собственная [круговая] частота
и соответствующая собственная мода колебаний
шп = , un{r, t) = Jo I — I sin
с \ с /
>la^
C7)
Просматривая таблицу значений {7п} на рис. 10.4.4, мы видим, что
высшие собственные частоты и>п не кратны и\ = ^\а/с\ потому звук
колеблющегося кругового барабанного диска не воспринимается как
гармоничный. Колебания мембраны в n-м нормальном режиме в C7) показаны на
10.4. Задачи в цилиндрических координатах 939
рис. 10.4.5, на котором показано вертикальное поперечное сечение,
проведенное через центр барабанного диска. В дополнение к границе г = с,
есть п — 1 фиксированных кругов, называемых узловыми кругами, с
радиусами г i = 7ic/7n> г = 1,2,...,п — 1. Кольцевые области мембраны
между последовательными парами узловых кругов двигаются
поочередно вверх и вниз между поверхностями и = ±Jo(jnr/c). На рис. 10.4.6
показано, как выглядит поверхность и = Jo{p(nr/c) для п = 1,2,3 и 4. ■
Рис. 10.4.5. Поперечное
сечение колеблющейся круговой
мембраны
(а)л=1 (b)w = 2
(c)n = 3 (d)n = 4
Рис. 10.4.6. Поверхность и = Jo{^nr/c)\ (a) n = 1; (b) n = 2; (с) п = 3;
(d)n = 4
940 Глава 10. Собственные значения и краевые (граничные) задачи
10 .4.Задачи _„._
1. Предположим, что круговая мембрана из примера 2 имеет начальное положение и(г, 0) = /(г)
и начальную скорость щ (г, 0) = 0. Получите методом разделения переменных решение
оо
u(r, t) = ^^ CnJo ( -2— J cos
7nat
n=l
где {7n}J° — положительные корни уравнения Jo (ж) = 0 и
2
Сп =
с2[ЛGп)]!
\Corf(r)J0(lf)d,
2. Предположим, что круговая мембрана из примера 2 имеет начальное положение и(г, 0) = 0
и начальную скорость ut(r, 0) = vo (константа). Получите решение
. ,Л 2cv0 v^ J0Gnr/c)sinGnat/c)
u(r,t) = > г""?"/—\ '
a ^1 7ЙЛGп)
где {7п}^° — положительные корни уравнения Jo (ж) = 0.
3. (а) Найдите u(r, t) в случае, если круговая мембрана из примера 2 имеет начальное положение
и(г, 0) = 0 и начальную скорость
—-, если 0 ^ г ^ е,
0, если б < г ^ с.
(Ь) Используйте то, что [Ji(x)]/x —» \ при х->0и найдите предельное значение выражения,
полученного в результате решения части (а) при в —► 0. Вы должны получить
, .ч аР0 v^ r/c) sin{7nat/c)
где {7n}J° — положительные корни уравнения Jo (ж) = 0. Эта функция описывает движение
барабанного диска после того, как он получил начальный (мгновенный) импульс Ро в центре.
4. (а) Круговая пластина радиуса с имеет изолированные грани и теплоемкость s калорий на
градус на квадратный сантиметр. Найдите u(r, t), если известно, что гл(с, t) = 0 и
и(г, 0) = <
[ г? если 0 = г = е»
0, если б < г < с.
(Ь) Найдите предел при е —► 0 выражения, полученного в результате решения части (а). У вас
должно получиться значение
(здесь {7п}?° — положительные корни уравнения Jo (x) = 0) для температуры после того, как
в центре пластины было введено qo калорий теплоты.
10.4. Задачи в цилиндрических координатах 941
В задачах 5-7 рассматривается установившаяся температура и = u(r,z) в твердом цилиндре
радиуса г = с с нижним основанием z — 0 и верхним основанием z — L, при условии, что и
удовлетворяет уравнению Лапласа
сРи 1ди сРи
дг2 г дг dz2
0.
5. Если w(r, L) = uq и на остальной части поверхности цилиндра поддерживается нулевая
температура, то с помощью метода разделения переменных получите решение
ti(r, z) = 2и0 У М-Упг/с) smhGnz/c) ^
~ 7пЛGп) sinhGnb/c)'
где {7п}^° — положительные корни уравнения Jo (ж) = 0.
6. (а) Пусть u{r,L) — /(г), и(г,0) = 0, и цилиндрическая поверхность г = с изолирована.
Получите решение в виде
оо
u(r, z) — cqz + ^Р Сп Jo (-^— J sinh
7n£
с
где {7п}^° — положительные корни уравнения Jo (ж) = 0. (Ь) Предположим, что /(г) = ?zo
(константа). Из результата части (а) выведите, что u(r, z) = uqz/L.
7. Предположим, что с = 1 и L = +оо, так что цилиндр на самом деле полубесконечен. Пусть
гх(г, 0) = ио, hu(l,z) 4- ur(\,z) = 0 (теплообмен на цилиндрической поверхности) и u(r, z)
ограничено при z —* -foo. Получите решение
exp(-7nz)JpGnr)
( \ ои V^ exp^-7n^c7ol,7n^
n(r,,) = 2toog G,+ft2)JoGrl)
где {7п}^° — положительные корни уравнения h Jo (ж) = xJi(x).
8. Начните с параметрического уравнения Бесселя порядка п
*2У
dx
dy_
Jdx
+
(а2*-т)у:
о.
C8)
Умножьте обе его части на 2ж dy/dx; затем запишите результат в виде
I П2
+ (aV-n2)-f-(y2) = 0.
аж
Проинтегрируйте почленно, используя формулу интегрирования по частям для второго члена,
и получите
(*!) +(«v-«v
2а2 хг/2 dx = 0.
Jo
Наконец, подставьте у(х) = Jo (ах), решение уравнения C8), чтобы получить формулу B0),
приведенную в основном тексте.
9. В этой задаче нужно найти интегралы, входящие в формулы для коэффициентов рядов Фурье-
. Бесселя при h = 0. (а) Подставьте п = 0 в результат задачи 8 и получите интегральную
формулу
[Cx[Jo(ax)}2 dx=^- ([Jo(ac)]2 + [Ji(ac)]2)
C9)
942 Глава 10. Собственные значения и краевые (граничные) задачи
(b) Предположим, что а = 7fc/c> гДе 7fc — корень уравнения Jo (х) = О. Выведите, что
I044^)]2d*=ir[Ji^2-
(c) Предположим, что а = 7fc/c> гДе 7fc — корень уравнения Jo (ж) = 0. Выведите, что
(d) Предположим, что а = 7fc/c» гДе 7fc — корень уравнения h Jo (ж) -f xJq(x) = 0. Выведите,
что
10. Предположим, что {7m}J° — положительные корни уравнения Jq(x)i.= Q и
оо
/(x) = co+^c^Jo(:^). . . . D0)
m=l
(а) Умножьте каждую часть уравнения D0) на ж и затем проингегрируте почленно от х = 0 до
х = си покажите, что
со = -х I xf(x)dx.
= !£*/(*)
(b) Умножьте каждую часть уравнения D0) на xJo{^nx/c) и затем проинтегрируйте почленно,
чтобы показать, что
^ = ~7Г77—^2 xf(x)J0 Г-~^) dx.
C2[J0Gm)] Jo Л- С У
11. Если на единицу массы круговой мембраны с фиксированной границей действует
периодическая сила Fq sin ujt, равномерно распределенная по мембране, то функция, вьфажающая ее
смещение u(r, t)9 удовлетворяет уравнению
at2
и 2 (д2и 1 ди\ _ .
Подставьте u(r, t) = #(г) smut и найдите установившееся периодическое решение.
12. Рассмотрим вертикально висящий кабель длины L и весом w на единицу длины, с
фиксированным (закрепленным, защемленным) верхним концом в точке х = L и свободным нижним
концом в точке ж = 0, как показано на рис. 10.4.7. Когда кабель совершает поперечные
колебания, функция, выражающая его смещение y(x,t), удовлетворяет уравнению
w д2у __ д^ ( ду\
g dt* ~ дх \WXdx) '
потому что натяжение равно Т(х) = wx. Подставьте функцию 2/(ж,£) = X(x)sinujt, затем
примените теорему раздела 8.6, чтобы решить полученное обыкновенное дифференциальное
уравнение. Выведите из решения, что собственные частоты колебаний висящего кабеля можно
вычислить по формуле
Шп = 2 V L ^>адиан в секУЧДУ)>
где {7n}i° — корни уравнения Jo (а?), *?.,0. Исторически эта была первая задача, в которой
появились функции Бесселя, , г ^ ; кг
10.4. Задачи в цилиндрических координатах 943
x = L
jc = 0h
Рис. 10.4.7. Вертикально
висящий кабель из задачи 12
^dl
-f
:ilii
_1_
jc = 0 x = Ly0m
Рис. 10.4.8. Канал из задач 13-15
В задачах 13-15 рассматривается канал, начало которого удалено на расстояние L от океана (на
рис. 10.4.8 приведен вид сверху). Его вертикальное поперечное сечение плоскостью,
перпендикулярной оси х, является прямоугольником с шириной w(x) и глубиной h(x); последняя равна постоянной
глубине воды в вертикальном сечении, проведенном через точку х. Рассмотрите периодический
прилив в канале, такой что вертикальное смещение водной поверхности равно y(x,t) = Х(х) cosujt
в момент времени L Тогоа y{x,t) удовлетворяет уравнению
дх
™(х)К*)-]£
w(x) д2у
Пусть уо = X(L) — амплитуда прилива в устье канала.
13. Предположим, что w(x) = wx и h(x) = h (константа). Покажите, что
Jo(wx/y/gK)
Примените теорему раздела 8.6.
14. Предположим, что w(x) = w (константа) и что h(x) = hx. Покажите, что
Jo \2wy/x/gh\
y{x,t) = уо—7 (
Jo \2wy/L/gh\
cosujt.
15. Предположим, что w(x) = wx и h{x) = hx, причем w и h — константы. Покажите, что
/£■ Ji fowy/x/gh)
7 ( cos wt.
x Ji Bwy/T/^h)
16. Если 0 < a < 6, то задача на собственные значения
d_
dx
J dx
+ Xxy = 0, y(o) = y(b) = 0
для параметрического уравнения Бесселя нулевого порядка является регулярной задачей Штур-
ма-Лиувилля. В соответствии с задачей 1 из раздела 10.1 по этой причине она имеет
бесконечную последовательность неотрицательных собственных значений, (а) Докажите, что нуль
944 Глава 10. Собственные значения и краевые (граничные) задачи
не является ее собственным значением. (Ь) Покажите, что n-е собственное значение равно
^п = 7п> гДе {7n}i° — положительные корни уравнения
Jo(ax)Y0(bx) - J0(bx)Y0(ax) = 0. D1)
Первые пять корней уравнения D1) для различных значений а/b приведены в таблице 9.7
справочника по специальным функциям М. Абрамовича и И. Стиган (Abramowitz and Stegun.
Handbook of Mathematical Functions), (с) Покажите, что соответствующая собственная функция
имеет вид
Rn(x) = Yo(jna)Jo(jnx) - JoGna)YoGnaj). D2)
17. Предположим, что кольцевая мембрана с постоянной плотностью р (на единицу площади)
находится под постоянным растяжением Т между кругами г = аиг = Ь>а. Покажите, что ее
n-я собственная [круговая] частота равна ип = Jn у/Т/р, где {7п}?° — положительные корни
уравнения D1).
18. Предположим, что бесконечная цилиндрическая оболочка а й г й b имеет начальную
температуру гл(г, 0) = f(r), и после этого и(а, t) = u(b,t) = 0. Методом разделения переменных
получите решение
оо
u(r,t) = ^2 °п exp (-7nk*) Rn(r),
n=l
где Rn (r) — функция в равенстве D2) и
го го
Сп\ r[Rn(r)]2 dr=\ rf(r)Rn(r)dr.
19. Рассмотрим полубесконечную цилиндрическую оболочку
0 <айгйЬ, z>0.
Пусть it(a, z) = u(b,z) = 0 и it(r, 0) = /(г). С помощью метода разделения переменных
найдите установившуюся температуру (температуру в установившемся режиме)
оо
u(r,z) = У^ сп exp (-7nz) Rn(r),
n=l
где {сп} и {Rn} определяются в задачах 18 и 16.
10.4. Приложение. Функции Бесселя и охлаждение
цилиндра
Здесь мы выделяем основные этапы исследования численными методами с помощью пакета
Цар1е функций, задающей распределение температур
U(r,t) = f>nexp(-^)j0(^) A)
в горячем цилиндрическом стержне из примера 1 в этом разделе. Конечно же,
аналогичное исследование можно выполнить с помощью и других систем, например Mathematica
и Matlab.
10.4. Задачи в цилиндрических координатах 945
Мы предполагаем, что цилиндрический стержень имеет радиус с = 10 см, постоянную
начальную температуру щ = 100° и коэффициент температуропроводности к = 0,15 (для
железа). Коэффициенты {апЦ°в равенстве A) зависят от условия, наложенного на границе
г — с цилиндра. В случае нулевого граничного условия м(с, i) = 0 из уравнения C0) в этом
разделе следует, что ап = 2uq/ Gn J\ Gп)), где {7П}^°—положительные решения уравнения
Мх) = 0.
Зная, что 7i ^ 2,4 и что последовательные корни отличаются приблизительно на 7г, мы
можем приближенно вычислить первые 20 значений 7п с помощью следующих команд
пакета Maple
д := arrayA..20): # массив g для значений гамма
for ri from 1 to 20 do # для п от 1 до 20 выполнить
g[n] := fsolve(BesselJ@,x)=0, x = 2.4 + (n-l)*Pi):
od:
n
1
2
3
4
5
6
7
8
9
10
7n"
2,4048
5,5201
8,6537
11,7915
14,9309
18,0711
21,2116
24,3525
27,4935
30,6346
Рис. '10.4.9. Первые 10
положительных нулей уравнения
Jo(x) = 0
В таблице на рис. 10.4.9 перечислены первые десять значений *уп- Тогда первые 20
коэффициентов в A) можно рассчитать с помощью команд
а := arrayA..20) : # массив A.. 20)
с := 10: и0 := 100: к := 0.15:
for n fropi 1 to 20 do # для п от 1 до 20 выполнить
a[n] := 2*u0/ (g [n] *BesselJ A, g[n])):t
od:
Наконец, следующая функция системы Maple суммирует соответствующие члены ряда:
u := (r, t) -> sum(a[n]*exp (-g[n] A2*k*t/cA2) *
BesselJ@, g[n]*r/c), n = 1..20);
График u(r, 120) на рис. 10.4.10 показывает, как температура внутри стержня через две
минуты изменяется с расстоянием г от центра цилиндра, и мы видим, что температура
946 Глава 10. Собственные значения и краевые (граничные) задачи
средней линии уже упала ниже 60°. График tt@, i) после истечения пятиминутного периода,
показанный на рис. 10.4.11 указывает, что температура средней линии за время, немного
большее чем 200 секунд, упадет до 25°. Действительно, вычисление с помощью команды
fsolve(u@, t) = 25, t = 200..250);
показывает, что на это требуется приблизительно 214 секунд.
Теперь исследуйте в проиллюстрированной нами манере ваш собственный
цилиндрический стержень с постоянной начальной температурой щ = 100°. Для этого возьмите с = 2р
и к = q/10, где р — наибольшая, aq — наименьшая отличная от нуля цифра вашего номера
студенческого билета.
Исследование А. Пусть цилиндрическая граница стержня поддерживается при
нулевой температуре м(с, t) = 0. Начертите графики, подобные приведенным на рис. 10.4.10
и 10.4.11, а затем определите, сколько времени потребуется для того, чтобы температура
средней линии стержня упалз до 25°.
100
80
60
s
40
0
1
^
i
i
**ЧцЧ?| =
1
! 1
= и(г, 120);
1 1
■--!
. 1
....J
8
10
Рис. 10.4.10. Температура как
функция расстояния г от
средней линии стержня
100 |
80
60
40
20h
"Ч ]
\м = 1
1 1
1
КО, Г)
i
0 50 100 150 200 250 300
t
Рис. 10.4.11. Температура
средней линии как функция времени
t
Исследование В. Теперь предположите, что на цилиндрической границе стержня
происходит теплообмен, так что коэффициенты в ряде A) вычисляются по формулам C4) из
текста. Предположите, что h = 1, так что {7n } i° — теперь положительные корни уравнения
Jo(x) + xJq(x) = Jq{x) — xJi(x) = 0
B)
(потому что Jq(x) = — Ji(x)). На рис. 10.4.12 показан график левой части уравнения B);
из графика видно, что 71 » 1>25, а последующий корень отличается от предыдущего (как
обычно) приблизительно на тт. Определите^ сколько времени в этом случае потребуется для
того, чтобы температура средней линии упала до 25°, и сколько времени потребуется для
того, чтобы температура на границе г = с упала до 25 °.
10.5. Явления высших размерностей 947
Рис. 10.4.12. Графику = J0(х) - xJq(x)
10.5. Явлений высших размерностей
В этом разделе мы обсуждаем приложение метода разделения переменных к тем задачам
распространения тепла и теории колебаний, которые содержат две или больше
пространственных переменных. Раздел в значительной степени состоит из иллюстративных
примеров, задач и проектов, сгруппированных согласно тому, какие координаты—прямоугольные,
цилиндрические или сферические — наиболее подходят для их решения.
Приложения прямоугольных координат и двумерный ряд Фурье
Как указано в разделе 9.7, лапласиан в двух измерениях принимает вид
V2u =
дх2 ду'4
Например, рассмотрим тонкую пластину, лежащую в плоскости ху, причем ее две
параллельные грани изолированы, так что распространение тепла в пределах пластины происходит
только в направлениях осей хиу. Если и(х, у, t) обозначает температуру в момент времени
t в точке (ж, у) в пределах пластины, то согласно стандартным предположениям из этого
следует, что и удовлетворяет двумерному уравнению теплопроводности
ди ,^2 .(дЧ д2и\
A)
Здесь к обозначает коэффициент температуропроводности материала, из которого сделана
пластину Если пластина является прямоугольной, а однородные граничные условия
наложены по ее четырем сторонам, то непосредственно может быть применен метод разделения
переменных.
Пример 1
Предположим, что тонкая прямоугольная пластина занимает область
0 ^ ж ^ а, О^у^б плоскости, что ее верхняя грань и основание
изолированы, причем на ее четырех боковых гранях поддерживается нулевая
948 Глава 10. Собственные значения и краевые (граничные) задачи
температура. Пусть задана функция, выражающая начальное
распределение температур в пластине: и(х, у, 0) = f(x, у). Тогда функция,
задающая распределение температур и(х, у, t), является решением граничной
(краевой) задачи (задачи, в которой заданы граничные (предельные, или
краевые) значения), состоящей из уравнения теплопроводности A) и
граничных условий
м@, у, i) = и(а, у, t) = и(х, 0, t) = и(х, 6, t) = 0, B)
u(x,y,0) = f{x,у). C)
Найдем и(х, у, i).
Решение Мы подставляем и(х, у, t) = X(x)Y(y)T(t) в уравнение A). После
деления на kXYT, мы получаем
Т__Х^_ У^_
кТ~ X + Y '
Это соотношение может выполняться для всех х, у и t, только если каждый
член является константой, так что мы пишем
Xм Y" Тг
Х = -Л, 1г = -М, й; = -(А + /*). D)
Принимая во внимание граничные условия B), мы видим, что X (х) и Y (у)
по отдельности являются решениями задачи Штурма-Лиувилля
Xм + ХХ= 0, Х@)= Х(а) = 0 E)
У" + fjY= 0, У@) = Y(b) = 0. F)
Собственные значения и собственные функции знакомой задачи E)
имеют вид
л т27г2 . ттгх
Ат = 2~, Хгп(х) = Sin G)
для га = 1, 2, 3, Точно так же собственные значения и собственные
функции задачи F) имеют вид
П2П2 v ( v . П7И/
^ = ~^2~' У"(У) = sm -у (Ю
для п = 1, 2,3, Мы используем разные обозначения для индексов га
и п в G) и (8), поскольку эти две задачи в уравнениях E) и F) независимы
(одна от другой).
Для каждой пары положительных целых чисел га, п мы должны
решить третье уравнение D)
, /га2 п2\ 27лр
■*-тп = — (^гп "Ь №n)k-Lmn — ~ I 2 ^~ 75" / ^
(9)
10.5. Явления высших размерностей 949
С точностью до мультипликативной константы решение уравнения (9)
имеет вид
Tmn(t)=exp(-jlnkt), A0)
где
7mn = 7rV^"+6^ A1)
Таким образом, мы нашли "дважды бесконечную" совокупность
стандартных блоков, и из этого следует, что "дважды бесконечный" ряд
Цж, y,t) = 2^ Xj Crnn еХР \1гппЩ SHI —— Sin — A2)
формально удовлетворяет уравнению теплопроводности A) и
однородным граничным условиям B).
Остается только определить коэффициенты { стп } так, чтобы ряд
удовлетворял также неоднородному условию
и(х, у, о) = 2^ 2^Сшп sm —sm ~т~ = f(x> у>' A3)
Чтобы сделать это, мы сначала сгруппируем члены в этом двумерном ряде
Фурье так, чтобы выделить полный коэффициент при sin(n7ry/6), и для
этого пишем
оо / оо
. ттгх \ . птгу
™ sin —
1 \ 1 а I ь
71=1 \ТП=1 /
/О*, у) = 2^ [1^ Cmn sm sin ~Г" ( ^
Мы хотим, чтобы для каждого фиксированного х ряд A4) был
расположенным по синусам рядом Фурье функции f(x, у) на интервале 0 ^ у ^ Ъ.
Это будет истинно при условии, что
оо а гЬ
Е.. ттгх 2 Г ти/
cwn sm = - /(х, у) sm —— dy. A5)
m=i «Но &
Правая часть равенства A5) есть функция Fn (x) для каждого п; т. е.
оо
KW = 2^ с™™ sm . A6)
771=1
Это требует, чтобы cmn был га-м коэффициентом расположенного по
синусам ряда Фурье функции Fn(x) на интервале 0 ^ ж ^ а; т. е. чтобы
= - Fn(x) sin da:. A7)
a J0 а
2 Га
950
Глава 10: Собственные значения и краевые (граничные) задачи
ЗАДАЧА 1
ЗАДАЧА 2
ПРОЕКТ А
Подставляя правую часть равенства A5) вместо Fn(x) в уравнение A7),
мы, наконец, получаем
ЧН.ЧТ'.Г. Ч1.1ГЧ1
ix A8)
4 Г Г ГП7ГХ . 717И/
Стп = "Г /(ж, У) SU1 SHI -— dydOL
ао Jo Jo « о
для m, n = 1, 2, 3, При этих значениях коэффициентов ряд в A3)
представляет собой расположенный по синусам двойной ряд Фурье
функции f(x,y) на прямоугольнике 0 ^ х ^ а, 0 ^ у ^ 6, причем
ряд в A2) формально является решением граничной (краевой) задачи
(задачи, в которой заданы граничные (предельные, или краевые)
значения) AИЗ). ■
Предположим, что /(#, у) = щ (константа). Вычислите коэффициенты в A8)
и получите решение
u{x,y,t) =
16щ
ТГ*
га нечетное п нечетное
ехр (-7тп^0 . гатгж . П7гу
sin-
sin-
ran
Заменим граничные условия B) в примере 1 на
и@, у, t) = гл(ж, 0, t) — 0,
/ш(а, г/, £) + г*ж(а, у, t) = /ш(х, 6, £) + %(ж, Ь, £) = 0.
Таким образом, на гранях х — 0 и у = 0 все еще поддерживается нулевая
температура, но теперь теплообмен имеет место на гранях х = аиу = 6.
В этих условиях получите решение
ОО ОО г}
Щх, y,t)= 2^ 2^Crnn exp (-7mnfc*) sm sm -г-'
m=l n=l
где 7^n = (am/aJ + (/3n/6J, {am} — положительные корни уравнения
/ia tg ж = —ж, {/?n} — положительные корни уравнения hb tg х = —х и
Сгап —
A-mD-
Г Г атя . /ЗпУ , ,
f{xy у) sm sm -7- dy dx,
n Jo Jo a &
где Am = (ha + cos2 am)/h и Бп = (/гб + cos2 Pn)/h.
Предположим, что на трех краях # = 0, у = 0 и у = Ь пластины из примера 1
поддерживается нулевая температура, но четвертый край х = а изолирован,
так что соответствующие граничные условия имеют вид
м@, у, t) = u(x, 0, t) = u{x, 6, t) = ux(a, у, t) = 0.
Пусть начальная температура пластины равна u(x,y,0) = f(x, у).
Покажите, что функция, задающая распределение температур в пластине, дается
формулой
U(x, У, *) = ]Г] £) Crnn eXP (~7mnkt) sin
Bm — 1Oгж . птгу
m=l n=l
2a
sm-
A9)
10.5. Явления высших размерностей 951
где
C7t),-(a¥i)' + (f)'
И
4 Г Г* ., ч . Bт - lWar . п-ку , ,
Сит = 5 Jo J/^8111 2^ «■"-J-**5-
Вам может быть полезен результат задачи 21 из раздела 9.3. Если /(ж, у) = uq
(константа), покажите, что равенство B) приводит к формуле
1бг*о ^ v^ ехР (шЦ . Bт — 1Oпе . П7и/
u{x,y,t) = —£-Y. J2
sin sin ■
Bm - l)n 2a 6
m=l n нечетное ч 7
B0)
Теперь численными методами исследуйте вашу личную пластину. Для
этого, возьмите щ = 100, а = Юр, Ь = 10а и к = г/10, где р и g — две
наибольшие цифры в номере вашего студенческого билета, а г—наименьшая
отличная от нуля цифра в номере вашего студенческого билета. Начертите
график функции z = u(x, у, t) для типичных значений t и проверьте, что
каждый такой график симметричен относительно средней линии у = 6/2,так
что (почему?) максимальная температура в пластине достигается в какой-то
точке на этой средней линии. Затем определите (можете применить метод,
использованный в проекте из раздела 10.2)
• сколько потребуется времени для того, чтобы максимальная
температура на краю х = а упала до 25°;
• значение максимальной внутренней температуры в пластине в этот
момент времени.
Колебания прямоугольных мембран
Теперь давайте рассмотрим двумерную гибкую мембрану, которая в положении
равновесия занимает некоторую область в горизонтальной плоскости ху. Предположим, что эта
мембрана колеблется вверх и вниз, aw(x,y,t) обозначает вертикальное смещение точки
(ж, у) мембраны в момент времени t. Если Тир обозначают натяжение мембраны и
плотность (на единицу площади) соответственно, то, согласно стандартным предположениям,
из этого следует, что функция, выражающая смещение u(x,y,t) мембраны, удовлетворяет
двумерному волновому уравнению
д2и - 2 2(д2и д2и\
_=c2V2u = c2 — + —. , B1)
dt2 \дх2 ду
щес2 = Т/р.
ЗАДАЧА 3 Предположим, что прямоугольная мембрана 0 ^ х ^ а, 0 й у ^ Ь
отпущена из состояния покоя с заданным начальным смещением и(х, у, 0) =
= f(x,y). Если четыре стороны мембраны считаются фиксированными
после этого, причем их смещение равно нулю, то функция, выражающая смеще-
952 Глава 10. Собственные значения и краевые (граничные) задачи
ние и(х, у, t), является решением граничной (краевой) задачи (задачи, в
которой заданы граничные (предельные, или краевые) значения), состоящей из
волнового уравнения B1) и граничных условий
w@? Уч t) = w(a, у, t) = и(х, 0, t) = и(х, 6, t) = 0,
и(х, у, 0) = f(x,y) (начальное положение), B2)
щ{х, у, 0) = 0 (начальная скорость).
Получите решение
оо оо .
и(Х, у, t) = у У Стп COS7mnCt Sin Sin -т-, B3)
ra=l n—1
где числа {jmn } и коэффициенты {сшп } определяются формулами A1)иA8)
соответственно.
Член ряда с номером тп в равенстве B3) определяет шп-ю собственную
моду колебаний прямоугольной мембраны, причем функция, выражающая
смещение, равна
UmnKX, У, t) = Sin Sin —— COS 1mnct. B4)
а о
В этой моде мембрана перемещается вверх и вниз между (воображаемыми)
поверхностями
, . ГП7ГХ . П-Ку
и = ± sin sin ——
а о
с круговой частотой штп = jmnC колебаний. На рис. 10.5.1 показано, как эти
поверхности выглядят при типичных маленьких значениях шип. Если с = 1
и а = Ъ — 7г (например), тогда последовательные частоты
^12 = ^21 = л/5 « 2.24, а;22 = V8 « 2:83,
^13 = ^31 = л/10 « 3.16, о^з = ^32 = V13 « 3.61,
сс;33 = \/18«4.24,
не кратны основной частоте (частоте основной (первой) гармоники, т. е.
(наинизшей) собственной частоте) шц = у/2 ж 1,41. Поэтому звук колеблющейся
прямоугольной мембраны не гармоничен, и потому обычно воспринимается
как шум, а не как музыка.
ЗАДАЧА 4 Предположим, что мембрана из задачи 3 представляет собой квадратный
тамбурин (бубен), лежащий вертикально поперек пикапа, который врезается
в кирпичную стену в момент времени t = 0. Тогда мембрана приведена в
движение с нулевым начальным смещением и постоянной начальной скоростью,
так что начальные условия имеют вид
и(ху у, 0) = 0, щ(х, у, 0) = г>о (константа).
10.5. Явления высших размерностей 953
(а) т = 2, п = 1
(Ь) т = 2,п = 2
(с) т = 3,л = 2
(d) m = 3,« = 3
Рис. 10.5.1. Поверхности вида и = sin sin —г—
В этом случае получите решение
16^0
u(x,y,t) =
£ Е
га нечетное п нечетное
sin7ranc£ . гптгх . П7гу
sin sin ——.
mn^mn a b
ПРОЕКТ В Предположим, что квадратная мембрана 0^х^7г, 0^у^7г оттянута
в ее центральной точке и приведена в движение из состояния покоя, причем
функция, выражающая начальное положение, имеет вид
и(х, у, 0) = /(х, у) = min{a:, у, тг - х, тг - ?/},
B5)
чей график в квадрате О^ж^тг, О^г/^тг напоминает Шатер (или
палатку) с квадратом в основе или пирамиду с высотой 7г/2, проходящей
через центр квадрата. Таким образом, функция-шатер /(ж, у) представляет
собой двумерный аналог знакомой одномерной треугольной функции. Она
может быть определена кусочно, как показано на рис. 10.5.2.
Используйте систему компьютерной алгебры mmMaple wmMathematica
и покажите, что формула с двойным интегралом в A8) дает сшп = 0,
954 Глава 10. Собственные значения и краевые (граничные) задачи
Ж
у (я, я)
\ l Ad
и "лЧч /fry)»*-? ,j|f|||}
■лг-ч^'-^ ,Jilllifl
ЙШй\ „ЛСД
■■ ■ '■ ;■. шшшшшмш
@,0) 7Г *
Рис. 10.5.2. Кусочное
определение функции-шатра
если ш/пи
2[1 - (-1)"] _
^7171 — о — Л
Г 4
7ГП*
-тг для п нечетных,
7ГП^
0 для п четных.
Поэтому из B3) следует, что получаемая функция, выражающаея смещение
мембраны, может быть вычислена по формуле
u(x,y,t)
Е
sin na; sinm/ co^ni
-.2
ty/2
n нечетное
П'
B6)
Понятно ли вам, что—поскольку сумма в B6) не содержит слагаемых (членов
ряда) сш/n- функция и(х, у, t) является периодической (относительно t)
с периодом 7гл/2? На тот факт, что функция-шатер B5) описывает
"музыкальные" колебания квадратной мембраны, впервые указал нам Джон Полкинг
(John Polking). На рис. 10.5.3 показаны некоторые типичные снимки этих
колебаний.
Приложения полярных координат
В задачах, в которых рассматриваются области с круговой симметрией относительно начала
координат в плоскости (или относительно вертикальной оси z в пространстве), выгодно
использовать полярные (или цилиндрические) координаты. В разделе 9.7 мы обсуждали
выражение двумерного лапласиана в знакомых полярных координатах на плоскости ((г, #),
для которых х = г cos в и у = г sin в. Трехмерный лапласиан функции и (г, #, z) в
цилиндрических координатах выражается формулой
VV
д2и 1ди
дг2 г дг
1 д2и д2и
г2 дв2 + dz2'
B7)
Если и не зависит от в или z, то соответствующая вторая производная отсутствует в правой
части равенства B7).
10.5. Явления высших размерностей 955
(а)г = 0
(b)f=7T/16
(с)г = 7Г/8 (d)t = 3n/\6
Рис. 10.5.3. Колебания квадратной мембраны с периодом Р = ттл/2.
Пример 2
Предположим, что твердый цилиндр (цилиндрическое тело) 0 ^ г й с,
МЭ ^ z ^ Л, изображенный на рис. 10.5.4, сделан из однородного материа-
Рис. 10.5.4. Цилиндр
(цилиндрическое тело)
из примера 2
956 Глава 10. Собственные значения и краевые (граничные) задачи
ла с коэффициентом температуропроводности к и име<ет осесимметриче-
ское начальное распределение температур u(r, z, 0) = /(г, z), которое не
зависит от^.Еслинаграницецилиндра(аграницейявляетсявертикальная
цилиндрическая поверхность г = с и два круга — один вверху (верхнее
основание) и второй внизу (нижнее основание)) после этого
поддерживается нулевая температура (возможно, потому что цилиндр завернут в лед
в момент времени £ = 0), то получаемая осесимметричная функция,
задающая распределение температура (г, z, t), является решением граничной
(краевой) задачи (задачи, в которой заданы граничные (предельные, или
краевые) значения)
ди 1УГг2 , (д2и 1ди д2и\
u(c, z, t) =tx(r, 0, t) = u(r, h,t) = 0 B9)
(нулевая температура на границе),
ti(r,^0)=/(r,s) C0)
(заданная начальная температура). ■
В следующих двух задачах рассматривается решение этой задачи распространения теплоты
для случая постоянной начальной температуры.
ЗАДАЧА 5 Покажите, что подстановка
v u(r, z, t) = R(r)Z(z)T(t)
в уравнение B8) приводит к разделению переменных
r2R" + rR' + a2r2R = 0, R(c) = 0; C1)
Z" + /32Z = 0, Z@) = Z(h) = 0; C2)
T' = -(a2 + C2)kT. C3)
Заметьте, что дифференциальное уравнение C1) представляет собой
параметрическое уравнение Бесселя нулевого порядка относительно R(r) и
потому C1) имеет собственные значения и собственные функции, данные для
случая 1 втаблиценарис. 10.4.2. Конечно, дифференциальные уравнения C2)
и C3) имеют знакомые тригонометрические и экспоненциальные решения.
Отсюда получите формальное решение в виде ряда
сю сю
u(r, z,t)=^2^2 emu ехр {-ХтпЩ Jo (-^J sin —г-> C4)
m=l п=1
где{7т}^°—положительные решения уравнения Jo(x) = 0 (которые указаны
в приложении к разделу 10.4)
*У2 71 7Г
10.5. Явления высших размерностей 957
а коэффициенты в равенстве C4) вычисляются по формуле
ЗАДАЧА 6
Г Г г/(г, г) Jo (^f) sin ^ dzdr. C6)
Вывод равенства C 6) подобен выводу формулы для коэффициентов двойного
ряда Фурье A8).
Пусть функция, задающая начальное распределение температур, постоянна:
/(г, z) = щ. Выведите из уравнений C4) и C6) равенство
птгг
u{r, z, t)
g^ - exp(-AmnH)J0^-^-jsin —
C7)
где Amn определяются равенством C5).
ПРОЕКТ С Исследуйте численными методами ваш собственный нагретый цилиндр.
Положите щ = 100, h = 10р, с = bq и к = г/10, гдеpnq — две наибольшие
цифры в номере вашего студенческого билета, а г — наименьшая отличная от
нуля цифра в номере вашего студенческого билета. Примите нулевые
граничные температуры как в задачах 5 и 6. Начертите поверхность z = u(r, z, t) для
типичных значений t и подтвердите физически вероятную догадку о том, что
в любой момент времени t максимальная температура в пределах цилиндра
наблюдается в его центральной точке, где г = Оиг = /г/2. Полезно начертить
также графики следующих функций.
1. График и как функции г при z = h/2 и постоянном значении t.
2. График и как функции z при г = 0 и постоянном значении t.
Затем определите, сколько времени потребуется, чтобы для максимальная
температура в пределах цилиндра упала до 25°.
Повторите это исследование в том случае, если температура
поддерживается равной нулю в основании цилиндра и на кривой (боковой) поверхности,
но его верхнее основание теперь изолировано, так что граничные условия B9)
теперь заменяются другими:
и(с, z, t) = и{г, 0, i) = uz(r, /i, t) = 0.
Используя (как в Проекте А) результат задачи 21 из раздела 9.3, вы должны
найти, что C7) заменяется формулой
( \ i4\ т (ЧгпГ\ . Bтг- 1Oгг
8?/п ^ ^ ехР {-^гппЩ Jo ( ) sm - —-—
га=1 п=1
где
-у2
/га
+
Bп- 1OгоЛGт)
Bп - 1Jтг2
4/г2
958 Глава 10. Собственные значения и краевые (граничные) задачи
Кажется ли вероятным, что максимальная температура цилиндра теперь
всегда достигается в центре его верхнего основания? Подтвердите эту
догадку соответствующими графическими исследованиями. Также определите,
сколько времени потребуется, чтобы эта максимальная температура упала
до 25°.
ПРОЕКТ D В этом проекте рассматриваются колебания однородной круговой мембраны
радиуса а. Если начальное смещение мембраны и скоростные функции
зависят от обеих полярных координат г и в, то волновое уравнение A9) в полярных
координатах принимает вид
Если мембрана отпущена из состояния покоя в момент временив = 0 и после
этого ее граница считается фиксированной (так что на окружности г — а
смещение и всегда равно нулю), то функция, выражающая смещение мембраны
и(г, 0, t), удовлетворяет и уравнению C9), и граничным условиям
и(а, 0, t) = 0 (фиксированная граница), D0)
и(г, 0,0) = /(г, в) (заданное начальное смещение), D1)
щ (г, 0,0) = 0 (нулевая начальная скорость). D2)
Восполните все детали в следующей схеме решения. Сначала покажите,
что подстановка
u{r,0,t) = R{t)e@)T{t)
в уравнение C9) приводит к разделению переменных
тп R" + -В! Qtr
;3т = —^~~ + ^е = "а2 (константа)- D3)
Тогда из
Г" + а2с2Т = 0, Т'@) = 0 D4)
следует, что, с точностью до постоянного числового множителя,
T(t) = cos act. D5)
Затем правое равенство в D3) дает уравнение
- + a2r2 + -Q- = 0, D6)
из которого следует, что
6"
— = — /З2 (константа). D7)
0
10.5. Явления высших размерностей 959
Чтобы решение 6@) уравнения 6" + /?26 = 0 имело необходимый период
(а период должен быть равен 27г), параметр /3 должен быть целым числом, так
что мы имеем ^-решения
ш = Г
Л /ЛЧ .cosn#, ,,пч
Оп(в) = { . ' D8)
smnv
для п — 0,1,2,3,
Подстановка 6"/6 = —п2 в D6) теперь дает параметрическое уравнение
Бесселя
r2R" + rR! + (a2r2 - n2)R = 0 D9)
порядка п, имеющее ограниченное решение Jn (ar). Поскольку нулевое
граничное (краевое, предельное) условие в D0) дает Jn (аа) = 0, случай 1 в
таблице на рис. 10.4.2 приводит к зависящим от г собственным функциям
Rrnnir) = Л*(^) (т = 1,2,3,... ;п = 0,1,2,... ), E0)
где 7тп обозначает т-е положительное решение уравнения Jn (x) = 0.
Чтобы найти приближенное числовое значение 7mn, можно сначала оценить
значение г i» 71 п первого корня, которое можно найти на графике Jn (#),
приведенном на рис. 10.5.5, и затем уточнить его с помощью соответствующей
команды системы компьютерной алгебры. Например, можно использовать
следующую команду системы компьютерной алгебры Mathematica
FindRoot[ BesselJ[n,x] ==, 0, {г, rl + (m - l)*Pi}]
Наконец, подстановка ашп = Gmn)/a дает зависящую от £ функцию
Tmn(t) = cos 2^. E1)
а
Объединяя D8), E0) и E1), мы видим, что наша граничная (краевая) задача
(задача, в которой заданы граничные (предельные, или краевые) значения)
для круговой мембраны, отпущенной из состояния покоя, имеет формальное
решение в виде ряда
ОО ОО -
и(г, в, t) = ^2^2^п{ тп) (amn cos n^+^шп sin n^cos mn ' E2)
Таким образом, типичная собственная мода колебаний круговой мембраны
с нулевой начальной скоростью имеет вид
UmnVT, и, t)=Jn[ I COS Пв COS E3)
V a / a
или аналогичный вид с sin пв вместо cos пв. В этой моде мембрана колеблется
cm—1 неподвижными^зяовьшм 0к/?>^^ = а)
с радиусами
rjn = -^- ДОЯ,? = 1,2,...,ш- 1.
7гап
960 Глава 10. Собственные значения и краевые (граничные) задачи
Рис. 10.5.5. Графики и
начальные нули первых нескольких
функций Бесселя
(a) m = 2, п - 1
(с) т = 2,л = 3
(Ь) т=1,л = 2
(d) т = 3,л = 2
Рис. 10.5.6. Типичные
узловые окружности и радиусы
колебаний круговой мембраны
Она также имеет 2п неподвижных узловых радиусов, разделенных углами
7г/п, начиная с в = 7г/Bп). На рис. 10.5.6 показаны некоторые типичные
конфигурации этих узловых окружностей и радиусы, которые делят круг на
кольцевые сектора, которые двигаются поочередно вверх и вниз в процессе
колебаний мембраны.
Формулы для коэффициентов в E2) часто не требуются для
практических приложений, в которых приходится иметь дело с колебаниями круговых
мембран. Мы предлагаем вам исследовать различные возможности, которые
могут представиться в процессе колебаний мембраны. Для этого начертите
графики прдходящих линейных комбинаций собственных функций,
определенных равенством E3). Например, на рис. 10.5.7 показаны снимки
колебания, определенного формулой
u{r,0,t) = JiG2iOcos^cos72i^ + «/2G32^) cos20cos732£ E4)
для круговой мембраны с с = 1 и радиусом а = 1. Если доступны
аппаратные средства мультимедиа и соответствующее программное обеспечение, вы
могли бы попробовать создать кинофильм, показывая такое колебание.
Приложения сферических координат
В задачах, в которых области обладают сферической симметрией относительно начала
координат в пространстве, удобно использовать сферические координаты, изображенные на
рис. 10.5.8. Трехмерный лапласиан функции и(р, ф, в) в сферических координатах
выражается формулой
vV
Г д ( 2ди\ 1 д (ди . \
1^р{рд-р) + ^щ{дф8тф)
+
1 д2и
зт2фдв2
E5)
10.5. Явления высших размерностей 961
(a)f = 0.0
(b)f = 0.2
(c)f = 0.4
(d)f = 0.6
Рис. 10.5.7. Снимки колебаний круговой мембраны, определяемые
уравнением E4)
Заметьте, что р = \Jx2 + у2 + z2 обозначает расстояние точки Р от начала координат 0,ф—
угол от положительной полуоси z до ОР ив — обыкновенный полярный координатный угол
в плоскости ху (хотя в некоторых учебниках полностью изменены роли ф и в). Заметьте также,
что если и не зависит от р, ф или в, то соответствующее слагаемое со второй производный
отсутствует в правой части равенства E5).
Рис. 10.5.8. Определение
сферических координат точки Р
962
Глава 10. Собственные значения и краевые (граничные) задачи
Пример 3
Предположим, что данная осесимметричная функция д(ф),
выражающая температуру, определена на граничной сфере р = а твердого шара
О ^ р ^ а, и мы ищем получающуюся осесимметричную функцию,
задающую установившееся распределение температур и(р, ф) внутри сферы.
Поскольку и не зависит от 0, уравнение Лапласа V2u = 0 принимает
(после умножения на р2 уравнения E5)) вид
д ( пди\
+
д
(ди
sinфдф \дф
Бтф\ = О,
E6)
и мы имеем единственное граничное (краевое, предельное) условие
гх(а, ф) = д(ф) (заданная температура на границе). E7)
■
В следующих задачах намечено решение этой граничной (краевой) задачи (задачи, в
которой заданы граничные (предельные, или краевые) значения) состоящее в том, чтобы найти
функцию, задающую распределение температур и(р, ф).
ЗАДАЧА 7 Покажите, что подстановка и(р, ф) = Я(р)Ф(ф) в уравнение E6) приводит
к разделению переменных
p2R" + 2рВ! - АД = О,
[(Бтф)Ф']' + \(Бтф)Ф = О,
E8)
E9)
где А является обычной постоянной разделения (переменных). Мы не можем
наложить никаких однородных граничных условий (поскольку их нет), но
мы действительно ищем непрерывные функции R{p) для 0 ^ р ^ а и Ф(ф)
для 0 ^ ф ^ 7г. Для уравнения E8) в качестве пробного решения подходит
функция R(p) = pk9 но уравнение E9) кажется полностью незнакомым.
ЗАДАЧА 8 Покажите, что подстановка
х = cos0, у{х) = <I>(arccosx) = Ф(ф) (—1 ^ х ^ 1)
в уравнение E9) приводит куравнению Лежандра
A - х2)у" - 2ху + Ху = О,
которое мы обсуждали в разделе 8.2. Это уравнение имеет решение у(х),
которое является непрерывным для — 1 ^ х ^ 1, только если А = п(п +
+ 1), где п — неотрицательное целое число. В этом случае у (х) представляет
собой функцию, равную произведению некоторого (постоянного) числа на
п-ймногочлен Лежандра Рп(х). Таким образом, мы видим, что собственные
значения и собственные функции уравнения E9) даются формулами
Ап = п(п 4-1), Фп(Ф) = Рп(совф)
F0)
10.5. Явления высших размерностей 963
для п = 1,2,3,.... Как вы помните из раздела 8.2, первые несколько
многочленов Лежандра равны
Ро(х) = 1, Рг(х)=х,
Р2(х) = \{Ъх2 - 1), Р3(х) = \(Ьх* - Зх),
Р4(х) = §C5х4 - ЗОх2 + 3),
ЗАДАЧА 9 При А = п(п -f 1) уравнение E8) принимает вид
p2R" + 2pR! - п(п + 1)R = 0.
Покажите, что пробное решение R(p) = pk приводит к общему решению
Но из непрерывности в р = 0 следует, что здесь В = 0, так что из этого
следует, что собственная функция уравнения E8), соответствующая Ап =
= п(п -f 1), равна (постоянному) числу, умноженному на Rn (p) = рп\ Таким
образом, мы нашли решения (играющие роль стандартных кирпичиков)
МР>Ф) = pnPn(cos<j)) (п = 0,1,2,...)
уравнения Лапласа E6). И, как обычно, наш следующий шаг состоит в том,
чтобы записать формальное решение в виде ряда
оо
«(Р. Ф) = J2 ЪпРПРп(сОЗ ф). F1)
п—0
ЗАДАЧА 10 Остается только обсудить выбор коэффициентов в уравнении F1), чтобы
удовлетворить неоднородному условию
оо
и(а, ф) = д(ф) = ]Г ЬпапРп(соБф).
п=0
При х = cos ф, f(x) = д(ф) = <7(cos-1 х)исп = Ьпап это равенство
принимает вид ряда Фуръе-Лежандра
оо
f(x) = Y,cnPn(x), F2)
п=0
выражающего функцию f(x) на интервале [—1,1] через многочлены
Лежандра. Учитывая, что многочлены Лежандра {Рп(х)}^ взаимно ортогональны
на интервале [—1,1] с весовой функцией г{х) = 1, примените формальный
метод разложения в ряд по собственным функциям из раздела 10.1. Для этого
964 Глава 10. Собственные значения и краевые (граничные) задачи
умножьте каждую часть уравнения F2) на Pk(x) и почленно
проинтегрируйте, чтобы получить формулу для коэффициентов ряда Фуръе-Лежандра
Сп —
J-1
f(x)Pn(x)dx
L[Pn(*)]a
dx
Но тогда, зная интеграл
\\[Рп(х)}
dx =
2га + 1'
получим
Си
2га+ 1
£ f(x)Pn(x)
dx.
F3)
Покажите, наконец, что такой выбор значений коэффициентов приводит
к формальному решению в виде ряда
оо (
F4)
п=0
граничной (краевой) задачи (задачи, в которой заданы граничные
(предельные, или краевые) значения), поставленной в уравнениях E6) и E7).
ЗАДАЧА 11 Введите обозначения
для к четных и
fc!! = fc(*-2)(fc-4)---4-2
fc!! = fc(fc-2)(fc-4)---3-l
для к нечетных. Зная интеграл
1,
Pn(x)dx =
Jo
i
2'
о,
если га = 0,
если га = 1,
если га = 2,4,6,...
F5)
(-1)(П-1)/2^ТШ' еслип = 3,5,7,-•
(п + 1)!
получите ряд Фурье-Лежандра
з{х) = |Fi(x) - 1Ъ(х) + ±±Р5(я) - ^Р7{х) + ■■■ =
(п - 2)!!
ВД + £ (-1)(п-1)/2Bп+1)^-^Р„(х)
п нечетное V ' * *
F6)
i нечетное
г>3
10.5, Явления высших размерностей 965
для функции прямоугольного колебания (меандра)
—1, если — 1 < х < 0,
s{x) =
+1, если 0 < х < 1.
На рис. 10.5.9 показан график частичной суммы 25 членов ряда в
равенстве F6), на котором отчетливо видно явление Гибса в окрестности точки
х = 0.
1.0
0.5
■> V.V
-0.5
-1.0
i i
Г"
1 1
-1.0 -0.5 0
j
1 1
i i
0 0.5 1.0
с
"WUep-
линия \
Рис. 10.5.9. График частичной
суммы 25 членов ряда,
представляющего прямоугольную волну
с помощью равенства F6)
ШШ;
■ШИШ
Рис. 10.5.10. Плавающий
сферический бакен с удельным весом
6 = 0,5
ПРОЕКТ Е На рис. 10.5.10 показан твердый сферический бакен радиуса а = 1 метр,
плавающий в воде. Если бакен имеет однородный удельный вес 6 = 0,5
(плотность материала бакена равна половине плотности воды), то он
погружается на глубину h = 1 метр, как показано на рисунке. Предположим, что
температура воды равна 10°, а температура воздуха равна 20°. При этих
условиях мы хотим найти функцию, задающую распределение температур и(р,ф)
внутри бакена, при граничном (краевом, предельном) условии
иA,$)=д(ф)
B0,
если 0 < ф < 7г/2,
если 7г/2 < ф < 7г.
Тогда
/(x) = ff(arccosx) = {^ 112 J<x<?} = 15 + 5s^>
если использовать обозначение ступенчатой функции s(x) из задачи 11.
Учитывая это, примените уравнения F4) и F6) и покажите, что
и(р, ф) = 15 + f рРх{со&ф) +
+ £ 5.(-l)(n-1)/aBn + l)^^|}pnPn(co8^). F7)
п нечетное
n>3
(n + 1)!
966 Глава 10. Собственные значения и краевые (граничные) задачи
Поскольку многочлены Лежандра нечетных степеней имеют только
слагаемые нечетных степеней, то из уравнения F7) следует, что бакен имеет
постоянную среднюю температуру 15° на уровне воды, т. е. во всем поперечном
сечении на уровне ватерлинии (где ф = 7г/2). Как первый шаг в
использовании ряда F7), исследуйте распределение температур внутри бакена. Для
этого просуммируйте достаточное количество членов для того, чтобы
начертить график и как функции u(z) высоты х (— 1 ^ z ^ 1) на вертикальной оси
симметрии бакена. Зная, что и@) = 15, найдите числовые значения z, для
которых и = 12,5° ни = 17,5°.
Рис. 10.5.11. Плавающий
бакен с S < 0,5
Задача для бакена более интересна, если удельный вес бакена меньше,
чем половина удельного веса воды, т. е. 0 < 8 < 0,5. В этом случае бакен
плавает в воде выше, т. е. так, как показано на рис. 10.5.11. Из закона Архимеда
для плавающих тел следует, что бакен плавает так, что погружена только
часть 6 его полного объема 47г/3. Следовательно, часть бакена, лежащая
ниже ватерлинии, имеет объем V = 47г J/3. Но этот объем также выражается
формулой объема сегмента сферы
V = fCr* + h*).
Приравняйте эти два выражения для V и покажите, что глубина h, но
которую погружается бакен в воду, представляет собой решение кубического
уравнения
h3 - 3h2 + 46 = 0. F8)
Теперь сами выберите 6 — можно, например, положить его равным одной
десятой наименьшей отличной от нуля цифры в вашем номере студенческого
билета. При выбранном значении удельного веса бакена начертите график
левой части этого уравнения, чтобы увидеть, что оно имеет единственный
корень в интервале 0 < h < 1. Найдите приближение к этому корню h
с точностью не меньше двух десятичных знаков. Затем запишите граничное
10.5. Явления высших размерностей 967
(краевое, предельное) условие (температура воды равна 10°, темпердтура
воздуха равна 20°) в виде
г/ ч Г10, если — 1 < х < h — 1,
fix) = \
[20, если h - 1 < х < +1,
так что равенство F3) дает формулу
сп = ЮРп{х) dx + 20Рп(ж) dx F9)
J-i J/i-i
для коэффициентов {сп}£° ряда
оо
и(р, </>) = ^ CnPnPn(cos0). G0)
п=0
Теперь вопросы — о температуре на уровне ватерлинии внутри бакена
и о том, где внутри бакена температура точно равна 12,5°, 15° и 17,5° —
становятся более интересными. Если h ф 0, то необходимо применить
численные методы интегрирования, чтобы оценить интегралы в F9). Например,
для этой цели вполне может использоваться следующая команда системы
Mathematical
с[п] = ( B*п'+ 1)/2)*
A0*NIntegrate[LegendreP[n,x], {х, -1, h - 1}] +
20*NIntegrate[LegendreP[n,x], {x, h - 1, 1}])
Объясните, почему из равенства G0) следует, что температура u(z) в точке
@,0, z) (на вертикальной оси симметрии бакена при —1 й z й 1)выражается
формулой
оо
u{z) = Y,cnzn. G1)
п=0
Если 8 выбрать так, чтобы h = 0,5, то частичная сумма ряда G1), состоящая
из 50 слагаемых, может использоваться для того, чтобы начертить график
u(z)9 показанный на рис. 10.5.12. Из этого графика мы видим, что
температура увеличивается нелинейно от и(—1) = 10дог/A) = 20. Используя
функцию FindRoot системы Mathematica, мы находим, что и(—0,6335) га 12,5,
и(-0,3473) « 15ии@) = 17,5.
Теперь температура в центре поперечного сечения бакена на уровне
ватерлинии равна и{—0,5) га 13,6603 (а не средней температуре 15°, которую
можно было бы ожидать по наивности). На рис. 10.5.13 мы видим, что
р = у/х2 4- 0,25 и ф = 7г — arctg \2x\
в точке, находящейся в поперечном сечении на уровне ватерлинии на
расстоянии х от вертикальной оси бакена. График и (теперь как функции х) показан
на рис. 10.5.14. Этот график был вычерчен следующим образом. Найденные
выражения для риф подставлялись в частичную сумму 50 членов ряда F7).
Можете ли вы (на интуитивном уровне) объяснить, почему при увеличении х
968
Глава 10. Собственные значения и краевые (граничные) задачи
25
20
з15
10
-1.0 -0.5 0.0 0.5 1.0
z
Рнс. 10.5.12. Температура
u{z) в точке z на вертикальной
оси бакена при h = 0,5
jw=10
*и = u(z)
и = 20
(начиная от нуля) температура и(х) сначала уменьшается, а затем быстро
повышается к и = 15° на граничном круге, представляющем собой поперечное
сечение на уровне ватерлинии?
Ocbz
Рис. 10.5.13. Поперечное
сечение науровне ватерлинии при
2 = _о,5,-^^я<; ^
15.0
14.5 Ь
а 14.0
13.5
13.0
-1.0 -0.5 0.0 0.5 1.0
х
Рис. 10.5.14. Температура и (х)
в поперечном сечение на уровне
ватерлинии бакена при h = 0,5
"Tf
и =13.6
603
.. г _ __
Сферические (шаровые) функции и обложка книги
Равенство E5) дает выражение трехмерного лапласиана в сферических координатах.
Рассмотрим, например, радиальные колебания поверхности упругой сферической планеты
радиуса с. Если и(ф, 6, t) обозначает радиальное смещение в момент времени t точки @, в)
на поверхности р = с планеты, то волновое уравнение utt = a2 V2w (при р = с и ир = 0)
принимает вид
д2и
at2
= b2V%u,
G2)
10.5. Явления высших размерностей 969
где 6 = а/си
д
^и=±фщ(^пф)
ди
/ sin
д2и
фдв2'
G3)
Ну а уравнение G2) моделирует колебания приливно-отливных волн на поверхности
сферической планеты радиуса с. В этом случае и (</>,0, t) обозначаетрадиальное смещение (от
положения равновесия) поверхности воды в точке (ф,в)в момент времени t и Ь2 =gh/c2, где
h—средняя глубина воды и g обозначает гравитационное ускорение на поверхности планеты.
Можно показать, что метод разделения переменных, который позволяет положить
u{4>,e,t) = YD>,o)T(t)
в уравнении G2), приводит к собственным функциям типичного вида
итп{Ф, 0, t) = Ушп{ф, в) cos u)nt. G4)
для 0 ^ т ^ п = 1,2,3, Частота этих колебаний ип = Ь^п{п Н-1) и У^гп обозначает
шаровую гармоническую функцию, определенную равенством
Утп(Ф, 0) = P™(cOS ф) COS тв
через так называемую присоединенную функцию Лежандра
Р™(х) = A-х2)т/2р(т\х),
G5)
G6)
где справа стоит m-я производная обыкновенного многочлена Лежандра.
Например, давайте рассмотрим волны на поверхности воды со (весьма нереалистичное
предположение) средней глубиной хлюпания h = 2 на поверхности маленькой сферической
планеты радиуса с = 5. На рис. 10.5Л5 и 10.5Л6 мы показываем несколько типичных форм
поверхности воды вида р — с -Ь КУтП{ф, в). Для рисунка на обложке этой книги мы взяли
га = Зип = 9.
^1 .r>f.-Af->>,?^/-TC-f"-r---V>"' \^\ УМ
Vv
ч4 T^f—
Рис. 10.5Л5. Здесьш = 1ип
^;:±^'
Рис. 10.5.16. Здесьга = 2ип = 6
ЛИТЕРАТУРА ДЛЯ
ДАЛЬНЕЙШЕГО ИЗУЧЕНИЯ
Литература по теории и приложениям дифференциальных уравнений весьма обширна.
Следующий список включает выбранные нами книги, которые могли бы быть полезны для
читателей, желающих глубже изучить темы, представленные в этой книге.
1. Abramowitz, M.andl. A.STEGUN,Handbook ofMathematical Functions (New York: Dover,
1965). Всеобемлющее справочное руководство (написанное Абрамовичем и Стиганом)
по математическим функциям, изданное в Нью-Йорке в 1965 году, содержит множество
таблиц, на которые часто делаются ссылки в тексте. [Имеется перевод: Справочник по
специальным функциям с формулами, графиками и математическими таблицами. /Под
ред. М. А. Абрамовича и И. Стигана. — М.: Наука, 1979.— 832 с.]2
2. Birkhoff, G. and G.-C. Rota, Ordinary Differential Equations, 2nd ed. (New York: John
Wiley, 1969). Учебник среднего уровня по обыкновенным дифференциальным
уравнениям, к написанию которого приложили руку знаменитый американский математик Гар-
ретт Биркгоф и всемирно известный специалист по обыкновенным дифференциальным
уравнениям Дж. Рота. В этом учебнике более тщательно рассматриваются теоремы
существования и единственности, задачи Штурма-Лиувилля и разложения по собственным
функциям. Второе издание вышло в Нью-Йорке в 1969 году.
3. BRAUN, М., Differential Equations and Their Applications, 3rd ed. (New York: Springer-
Verlag, 1983). Вводный курс дифференциальных уравнений и их приложений. Написан
известным специалистом Брауном на немного более высоком уровне, чем эта книга;
в нем широкко используется методика обучения на иллюстрирующих примерах. Третье
издание вышло в Нью-Йорке в 1983 году.
4. Churchill, R. V., Operational Mathematics, 3rd ed. (New York: McGraw-Hill, 1972). Книга
Черчиля по операционному исчислению представляет собой стандартный справочник
по теории и приложениям преобразований Лапласа (изображений по Лапласу),
начинающийся приблизительно на том же самом уровне, что и глава^ этой книги. Третье издание
вышло в Нью-Йорке в 1972 году.
5. CHURCHILL, R. V. and J. W. Brown, Fourier Series and Boundary Value Problems, 3rd
ed. (New York: McGraw-Hill, 1978). Учебник по рядам Фурье и граничным (краевым,
предельным) задачам. Учебник написан Черчилем и Брауном приблизительно на том
же самом уровне, что и главы 9 и 10 этой книги. Третье издание вышло в Нью-Йорке
в 1978 году.
6. CODDINGTON, E. A., An Introduction to Ordinary Differential Equations (EnglewoodCliffs,
N.J.: Prentice Hall, 1961). Введение в обыкновенные дифференциальные уравнения, напи-
2 Комментарии к библиографическим ссылкам для удобства читателя дополнены редакторами русского
перевода. В наиболее существенных случаях дополнения взяты в квадратные скобки. — Примеч. ред.
Литература для дальнейшего изучения 971
санное всемирно известным специалистом Э. Коддингтоном. Вводный курс
промежуточного уровня; главы 3 и 4 содержат доказательства теорем о степенных рядах и решениях
в виде рядов Фробениуса, рассмотренных в главе 8 этой книги.
7. CODDINGTON, E. A. andN. LEVINSON, Theory of Ordinary Differential Equations (New York:
McGraw-Hill, 1955). Расширенный теоретический текст; в главе 5 обсуждаются решения
в окрестности иррегулярной (нерегулярной) особой точки. [Есть перевод: Коддингтон
Э., Левинсон Н., Теория обыкновенных дифференциальных уравнений. —М., 1958.]
8. DORMANT), J. R., Numerical Methods for Differential Equations (Boca Raton: CRC Press,
1996). Пособие по численным методам решения дифференциальных уравнений,
изданное в 1996 году. Более полный охват современных выслительных методов приближенного
решения дифференциальных уравнений.
9. Haberman, R., Elementary Applied Partial Differential Equations, 3rd ed. (Upper Saddle
River, N.J.: Prentice Hall, 1998). Пособие по основам приложений дифференциальных
уравнений в частных производных. Следующий шаг после глав 9 и 10 этой книги, но
изложение все еще весьма доступное. Третье издание вышло в 1998 году.
10. Hubbard, J. H. and В. Н. WEST, Differential Equations: A Dynamical Systems Approach
(New York: Springer-Verlag, 1992 (part I) and 1995 (Higher-Dimensional Systems)). В
книге Хаббарда и Веста рассматриваются дифференциальные уравнения и динамические
системы. Детально изучаются качественные явления, сбалансированная комбинация
вычислительных и теоретических точек зрения. Часть I вышла в 1992 году, а часть II,
посвященная системам более высоких размерностей—в 1995.
11. INCE, E. L., Ordinary Differential Equations (New York: Dover, 1956). Учебник по
обыкновенным дифференциальным уравнениям. Первоначально изданная в 1926 году, это
классическая книга по данной теме. [Имеется перевод предыдущего издания: Айне Э. Л.,
Обыкновенные дифференциальные уравнения.—Харьков: Гостехиздат Украины, 1939.—
717 с]
12. LEBEDEV, N. N., Special Functions and Their Applications (NewYork: Dover, 1972).
Всесторонняя книга по функциям Бесселя и другим специальным функциям математической
физики. [Лебедев Н. Н., Специальные функции и их приложения.]
13. Lebedev, N. N., I. P. Skalskaya, and Y. S. Uflyand, Worked Problems in Applied
Mathematics (New York: Dover, 1979). Большая коллекция прикладных примеров и
задач, подобных рассмотренным в главе 10 этой книги. [Лебедев Н. Н., Скальская И. П.,
Уфлянд Ю. С, Сборник задач по математической физике. — М., ГИИТЛ, 1955.]
14. McLachlan, N. W., Bessel Functions for Engineers, 2nd ed. (London: Oxford University
Press, 1955). Справочник по функциям Бесселя для инженеров, изданный в Лондоне
Оксфордским университетом в 1955 году B-е издание). Включает многочисленные
физические приложения функций Бесселя.
15. MCLACHLAN, N. W., Ordinary Non-Linear Differential Equations in Engineering and
Physical Sciences (London: Oxford University Press, 1956). Пособие по применению
обыкновенных нелинейных дифференциальных уравнений в инженерных и физических
науках, изданное в Лондоне Оксфордским университетом в 1956 году. Введение в
нелинейные явления в физических системах с конкретными примерами.
16. POLKING, J. С. and D. Arnold, Ordinary Differential Equations Using MATLAB, 2nd ed.
(Upper Saddle River, N. J.: Prentice Hall, 1999). Книга, написанная Полкингом и Арнольдом
972 Литература для дальнейшего изучения
по применению пакета MATLAB в курсе обыкновенных дифференциальных уравнений.
Фактически представляет собой справочник по Matlab, который учит использовать этот
пакет в элементарном курсе дифференциальных уравнений; базируется на программах
dfieldnpplane пакета М ATLAB, которые используются и упомянуты в этом учебнике.
Второе издание вышло в 1999 году.
17. PRESS, W. Н., В. P. FLANNERY, S. A. TEUKOLSKY,andW. T. VETTERLlNG,M//werica/Recipes:
The Art of Scientific Computing (Cambridge: Cambridge University Press, 1986). Книга под
названием, которое можно превести на русский язык, как Числовые рецепты: искусство
научных вычислений издана в издательстве Кембриджского университета в 1986 году.
В главе 15 обсуждаются современные методы численного решения дифференциальных
уравнений. Это издание включает программы на языке FORTRAN; были изданы также
издания с программами на языках Pascal и С.
18. RAINVILLE, Е., Intermediate Differential Equations, 2nd ed. (New York: Maqmillan, 1,964).
Курс дифференциальных уравнений среднего уровня, 2-е издание которого вышло в Нью-
Йорке в 1964 году. Главы 3 и 4 содержат доказательства теорем о степенных рядах
и решениях в виде ряда Фробениуса, рассмотренных в главе 8 этой книги.
19. SAGAN, Н., Boundary and Eigenvalue Problems in Mathematical Physics (New York: John
Wiley, 1961). Книга, посвященная рассмотрению граничных задач и задач на собственные
значения в математической физике. Обсуждаются классические граничные (краевые)
задачи (задачи, в которых заданы граничные (предельные, или краевые) значения) и
вариационный подход к задачам Штурма-Лиувилля, собственным значениям и собственным
функциям. Вышла в Нью-Йорке в 1961 году.
20. Simmons, G. R, Differential Equations (New York: McGraw-Hill, 1972). Вводный курс
дифференциальных уравнений с интересными историческими примечаниями и
очаровательными приложениями и к тому же с самым красноречивым предисловием изо всех
книг по математике, выпущенных по настоящее время из печати. Вышла в Нью-Йорке
в 1972 году. [Вот более полное название этой книги: Differential equations with applications
and historical notes.]
21. Tolstov, G. P., Fourier Series (New York: Dover, 1976). Вводный учебник,
включающий детальное обсуждение сходимости и приложений рядов Фурье. [Русский оригинал:
Толстов Г. П., Ряды Фурье. 2-е изд. — М., I960.]
22. Thompson, J. М. Т. andH. В. STEWART,Nonlinear Dynamics and Chaos (New York: John
Wiley, 1986). Книга известных специалистов Томпсона и Стюарта, посвященная
нелинейной динамике и хаосу. Включает более детальные обсуждения уравнений Дуффинга
в случае вынужденных колебаний, Лоренца и систем Росслера (среди других, в которых
наблюдаются нелинейные хаотические явления). Книга вышла в Нью-Йорке в 1986 году.
23. WEINBERGER, Н. ¥.9А First Course in Partial Differential Equations (NewYork: Blaisdell,
1965). Вводный курс дифференциальных уравнений в частных производных,
написанный известным специалистом Вейнбергом, включает разделение переменных, методы
Штурма-Лиувилля и приложения методов преобразования Лапласа (изображения по
Лапласу) к дифференциальным уравнениям в частных производных. Книга вышла в Нью-
Йорке в 1965 году.
24. Weinstock, R., Calculus of Variations (New York: Dover, 1974). Книга по вариационному
исчислению, написанная известным специалистом Вейнетоком, включает вариацион-
Литература для дальнейшего изучения 973
ные методы вывода дифференциальных уравнений в частных производных колебаний
струны, мембран, стержней и балок. Книга вышла в Нью-Йорке в 1974 году.
Литература, добавленная редактором русского перевода
Следующий ниже список включает некоторые книги, изданные на русском языке и
имеющиеся переводы на русский язык. Конечно, этот список не претендует на полноту, уже хотя
бы потому, что я стремился указать только классические монографии или учебники, которые
в свое время были доступны, по крайней мере, в Москве и Ленинграде. Впрочем, в
некоторых случаях я все же не удержался и включил в список работы, которые представляют
исторический интерес.
1. Андронов А. А., Витт А. А., Хайкин С. Э. Теория колебаний, — М.: Физматгиз, 1959.
2. АРНОЛЬД В. ^Дополнительные главы теории обыкновенных дифференциальных
уравнений, -М.: Наука, 197'8.- 304 с.
3. АРНОЛЬД В. И. Лекции об уравнениях с частными производными.
4. Арнольд В. И. Математические методы классической механики, — М.: Наука, 1979.
5. АРНОЛЬД В. И. Обыкновенные дифференциальные уравнения,—М.: Наука, 1971. — 240 с.
Довольно современный учебник, написанный Великим Мастером. Изложение вполне
доступно для второкурсников.
6. АРУШАНЯН О. Б., Залеткин С. Ф. Пакет прикладных программ решения типовых
задач для обыкновенных дифференциальных уравнений II Вопросы конструирования
библиотек программ. — М.: Изд-во Моск. ун-та, 1985.
7. БАБЕНКО К. И. Основы численного анализа. —Ш.: Наука, 1986.
8. БАБУШКА И., ВИТАСЕК Э., Прагер М. Численные процессы решения дифференциальных
уравнений. — М.: Мир, 1979.
9. БАРБАШИН Е. А. Введение в теорию устойчивости. — М.: Наука, 1971. — 223 с.
10. БАУТИН Н. Н., Леонтович Е. А. Методы и приемы качественного исследования
динамических систем на плоскости, —Ы.: Наука, 1976.
11. Бахвалов Н. С, Жидков Н. П., Кобельков Г. М. Численные методы, — М.: Наука,
1987.
12. БЕЛЛМАН Р. Теория устойчивости решений дифференциальных уравнений, — М.: ИЛ,
1954.
13. БЕЛЛМАН Р., КУК К. Л. Дифференциально-разностные уравнения. — М.: Мир, 1967.
14. БЕРЕЗИНИ. С, Жидков Н. П.Методы вычислений, — Т.2,— М.: Физматгиз, 1962.
15. БИБИКОВ Ю. Н. Курс обыкновенных дифференциальных уравнений. Университетский
учебник классического типа для математиков, написанный на основе курсов, которые
автор читал в 1980-е годы в Ленинградском университете.
16. БИБИКОВ Ю. Н. Общий курс обыкновенных дифференциальных уравнений.
Университетский учебник традиционного типа для математиков, написанный на основе курсов,
которые автор читал в 1970-е годы в Ленинградском университете.
17. Биркгоф Дж. Д. Динамические системы. — М.: ГОНТИ, 1941.
18. БОРДОВИЦИНА Т. В. Современные численные методы в задачах небесной механики. —
М.: Наука, 1984,136 с.
974 Литература для дальнейшего изучения
19. БРЮНО А. Д. Локальный метод нелинейного анализа дифференциальных уравнений. —
М: Наука, 1979.
20. Бугров Я. С, Никольский С. М. Дифференциальные уравнения. Кратные интегралы.
Ряды. Функции комплексного переменного. — М.: Наука, 1981. — 448 с. Пос. для втузов.
21. ВАЛЛЕ-ПУССЕН Ш. Ж. Курс анализа бесконечно малых. — М.: ИЛ., 1962.
22. Гантмахер Ф. Р. Теория матриц, 3-е изд. — М.: Наука, 1967.
23. Гельфанд И. М., Фомин С. В. Вариационное исчисление. — М.: Физматгиз, 1961.
24. Годунов С. К., Рябенький В. С. Разностные схемы. —М.: Наука, 1977.
25. ГОРБУНОВ А. Д. Разностные методы решения задачи Коши для системы обыкновенных
дифференциальных уравнений (тексты лекций). — М.: Изд-во Моск. ун-та, 1973.
26. ГУДИМЕНКО Ф. С. Диференщальт ргвняння.— К:, Изд-во Киевского ун-та, 1958.
27. ГУДИМЕНКО Ф. С, ПАВЛЮК I. А., ВОЛКОВА В. О. Збгрник задач з диференщалъних
ргвнянь. — К:, Вища школа, 1972.
28. Гутер Р. С, Янпольский А. Р. Дифференциальные уравнения. — М.: Физматгиз, 1962.—
246 с.
29. Данко П. Е., Попов А. Г., Кожевникова Т. Я. Высшая математика в упражнениях
и задачах. — М.: Высш. школа, 1980. — 365 с.
30. ДЕМИДОВИЧ Б. П. Лекции по математической теории устойчивости. — М.: Наука,
1967.-472 с.
31. Деч Г. Руководство к практическому применению преобразования Лапласа. — М.:
Наука, 1965.-287 с.
32. Дьяченко В. Ф. Основные понятия вычислительной математики. —Ш.: Наука, 1977.
33. ЕРУГИН Н. П. Книга для чтения по общему курсу дифференциальных уравнений. —ЪА.:
Наука и техника, 1972. — 668 с.
34. ЕРУГИН Н. П. Линейные системы обыкновенных дифференциальных уравнений. —
Минск, 1963.
35. ЕРУГИН Н. П. Неявные функции. — Л.: Изд-во ЛГУ, 1950.
36. ЕРУГИН Н. П. и др. Курс обыкновенных дифференциальных уравнений.—К.: Вища школа,
1974.-472 с.
37. ЖОГОЛЕВ Е. А. Программа интегрирования систем обыкновенных дифференциальных
уравнений 2-го порядка методом Штермера II Вычислительные методы и
программирование. Вып. I. — М.: Изд-во Моск. ун-та, 1962.
38. ЗАЛЕТКИН С. Ф. О численном решении задачи Коши для обыкновенных линейных
однородных дифференциальных уравнений на больших отрезках интегрирования II
Вычислительные методы и программирование. Вып. XXVI. — М.: Изд-во Моск. ун-та, 1977.
39. ЗАЛЕТКИН С. Ф. Численное решение обыкновенных дифференциальных уравнений
многошаговыми методами II Конструирование библиотек программ. — М.: Изд-во Моск.
ун-та, 1986.
40. ЗЕЛЬДОВИЧ Я. Б., МЫШКИС А. Д. Элементы прикладной математики. — М.: Наука,
1972.-592 с.
41. ИШЛИНСКИЙ А. Ю. Инерциальное управление баллистическими ракетами. — М.: Наука,
1968.
Литература для дальнейшего изучения 975
42. Калиткин Н. Н. Численные методы.
43. Камке Е. Интеграл Лебега-Стильтьеса. — М.: Физматгиз, 1959.
44. КАМКЕ Э. Справочник по дифференциальным уравнениям в частных производных
первого порядка. — Щ.\ Наука, 1966.
45. Камке Э. Справочник по обыкновенным дифференциальным уравнениям. — М.: Наука,
1971. — 576 с. Это всеобемлющий справочник для тех, кто увлекается классификацией
дифференциальных уравнений или просто хочет найти готовые решения
дифференциальных уравнений, не очень утруждая себя выкладками. Хотя изложение теории
несколько конспективно, количество примеров с решениями просто поражает—больше полутора
тысяч!
46. Карташев А. П., Рождественский Б. Л. Обыкновенные дифференциальные уравнения
и основы вариационного исчисления. — М.: Наука, 1980. — 288 с.
47. КЕЛЛИ Дж. Л. Общая топология. — М.: Наука, 1968. Это классический учебник по
топологии — доступный и простой. Вероятно, по этой причине некоторые выдающиеся
топологи считают, что он устарел еще до выхода, другие же полагают, что такой учебник
не устареет никогда.
48. Киселев А. И., Краснов М. А., Макаренко Т. И. Сборник задач по обыкновенным
дифференциальным уравнениям. — М.: Высш. школа, 1965. — 307 с.
49. Колмогоров А. Н., Фомин С. В. Элементы теории функций и функционального
анализа. — М.: Наука, 1968. Классический учебник по функциональному анализу для мех-
матовских третьекурсников.
50. КОСТРИКИН А. И.:Введение в алгебру. — М.: Наука, 1977.
51. КРЫЖАНОВСКИЙ С. Ъ. Дифференциальные уравнения. — X.: ГОНТИ, 1938. — 398 с.
52. Крылов В. И., Бобков В. В., Монастырный П. И. Начала теории вычислительных
методов. Дифференциальные уравнения. — Минск: Наука и техника, 1982. — 286 с.
53. Курант Р. Уравнения с частными производными.
54. ЛАГРАНЖ Ж. Аналитическая механика. Т. 1 и 2. — М.-Л.: Гостехиздат, 1950.
55. Ла-Саллъ Ж., ЛЕФШЕЦ С. Исследование устойчивости прямым методом Ляпунова. —
М.: Мир, 1964.
56. ЛЕФШЕЦ С. Геометрическая теория дифференциальных уравнений. — М.: ИЛ, 1961.
57. ЛИЗОРКИН П. И. Курс дифференциальных и интегральных уравнений с
дополнительными главами анализа. — М.: Наука, 1981. —384с.
58. ЛЯШКО И. И. и др. Дифференциальные уравнения. — К.: Вища школа, 1981. — 504 с.
59. MACCEPA X., ШЕФФЕР X. Линейные дифференциальные уравнения и функциональные
пространства. — М.: Мир, 1970.
60. Максвелл Д. К., Вышнеградский И. А., Стодола А. Теория автоматического
регулирования. — М.: Гостехиздат, 1949.
61. МАЛКИН И. Г. Теория устойчивости движения, 2-е изд. — М.: Наука, 1966.
62. МАРСДЕН Дж., Mak-Кракен М. Бифуркация рождения цикла и ее приложения. — М.:
Мир, 1980.
63. МАРТЫНЕНКО В. С. Операционное исчисление. — К.: Изд-во Киев, ун-та, 1968. — 202 с.
976 Литература для дальнейшего изучения
64. Матвеев Н. М. Методы интегрирования обыкновенных дифференциальных
уравнений. — М.: Высшая школа, 1967. Обстоятельный учебник для мат-меха (так в Лени-
градском (и ныне Санкт-Петербургском) университете называется мехмат). Выдержал
несколько изданий (см. дальше), иногда существенно отличающихся в деталях.
65. Матвеев Н. М. Методы интегрирования обыкновенных дифференциальных
уравнений.— Л.: Изд-во Ленингр. ун-та, 1965.
66. МатвеевН. М.Методы интегрированияобыкновенныхуравнений.—Минск:Вышэйш.
школа, 1974. —766 с.
67. Матвеев Н. M. Сборник задач и упраэюнений по обыкновенным дифференциальным
уравнениям. — Минск: Вишэйш. школа, 1970. — 357 с.
68. МАТВЕЕВЫ. М. Дифференциальные уравнения.
69. Матвеев Н. М.Методы интегрирования обыкновенных дифференциальных уравнений.
70. Матвеев Н. М. Сборник задач и упраэюнений по дифференциальным уравнениям.
71. Милн В. Э. Численное решение дифференциальных уравнений. — М.: ИЛ, 1955.
72. Милнор Дж. Теория Морса. — М.: Мир, 1965.
73. Натансон И. П. Теория функций вещественной переменной. — М.: 1950.
74. Немыцкий В. В., Степанов В. В. Качественная теория дифференциальных
уравнений, 2-е изд., М.-Л.: ГИТТЛ, 1949.
75. Ньютон Нематематические начала натуральной философии.—Перевод с латинского
с примечаниями и пояснениями А. Н. Крылова //Собрание трудов академика А. Н.
Крылова, т. VII. - М.-Л.: Изд-во АН СССР, 1936.
76. Петровский И. Г. Лекции по теории обыкновенных дифференциальных уравнений. —
М.: МГУ, 1984.
77. Плисе В. К. Нелокальные проблемы теории колебаний. — М.: Наука, 1964.
78. Понтрягин Л. С. Обыкновенные дифференциальные уравнения.—М.: Наука, 1965.
История создания этого учебника весьма поучительна. Учебник был написан на основе курса
лекций, который читал на мехмате МГУ сам Лев Семенович. Несомненно, созданный
им курс для того времени был революционным. Этот курс с самого начала существенно
отличался от обширных курсов, переполненных всевозможными пустяковыми
деталями лишь потому, что старые профессора не в состоянии опустить все эти пустяки, так
как ничем иным заполнить лекционное время они не могут. Разработанный Львом
Семеновичем курс имел в своей основе совсем небольшое количество современных (для
своего времени) основополагающих идей, которые должны были усвоить студенты не
путем зубрежки, а путем активного примения их для решения действительно важных
задач теории дифференциальных уравнений. Не удивительно, что весьма многочисленные
консерваторы ополчились против курса. Прежде всего я думаю, это произошло потому,
что этот курс был предельно кратким, четким и понятным для студентов. (О, как
некоторые профессора любят рассуждать о том, чего не понимают сами!) Поскольку такой
курс понравился студентам, это еще больше усилило неприязнь завистников к лектору.
А тут еще лектор решил опубликовать такой учебник! Из-за этого начались самые
безобразные партийно-административные козни: то рукопись найти не могут, то подписи
нет, то типография занята, то желания нет, то опять утеряли, а потом забыли и т. д. Но Лев
Семенович был тертый калач, закаленный в борьбе с партбюро, и все эти козни успешно,
Литература для дальнейшего изучения 977
хотя и не без труда, преодолевал. Казалось, все шло к победе, хотя и сильно изматывало
лектора. И вот тогда-то из-за кулис появился главный консерватор — администратор
(им оказался декан мехмата МГУ В. В. Степанов — автор не менее знаменитого
учебника) и распорядился: не печатать, в библиотеку не принимать, студентам не давать! Но
все же незадолго до экзамена учебник появился. И хотя курс завершился абсолютным
триумфом (студенты отлично сдали экзамен), Лев Семенович устал до такой степени,
что пришлось отказаться от чтения этого курса в следующем учебном году! (Никому из
учеников Льва Семеновича продолжить чтение курса не разрешили.) Пиррова победа?
Оказалось, что нет: учебник в уникально короткий срок (меньше года) был переведен на
английский и пользовался огромным успехом у американских студентов. А потом
выдержал пять официальных (последнее в 1982 году) изданий в СССР! Настоятельно советую
хотя бы просмотреть эту книгу и сравнить, чем она отличается от учебника Степанова.
Это поможет еще раз взглянуть на теорию обыкновенных дифференциальных
уравнений с высоты птичьего полета и самостоятельно составить представление о том, рак
развивалась теория обыкновенных дифференциальных уравнений в XIX веке и первой
половине XX века.
79. ПОТТЕР Д. Вычислительные методы в физике,
80. Пушкаре А. О кривых, определяемых дифференциальными уравнениями, — М.-Л.: Го-
стехиздат, 1947.
81. РАУС Э. Дж. Динамика системы твердых тел, — Т. I и II. — М.: Наука, 1983.
82. Риман Б. Сочинения. — М.—Л.: Гостехиздат, 1948, с. 225-261.0 возможности
представления функции посредством тригонометрического ряда.
83. РИСС Ф., Секефальви-Надь Б. Лекции по функциональному анализу, — М.: ИЛ, 1954.
84. РОУЧ П. Вычислительная гидродинамика.
85. Самарский А. А., Гулин А. В. Численные методы, —М.: Наука, 1989. —432 с.
86. Самарский А. А. Введение в численные методы.
87. САНСОНЕ Дж. Обыкновенные дифференциальные уравнения. — Т. 1 и 2. — М.: ИЛ, 1953-
1954.
88. СОБОЛЕВ В. И. Лекции по дополнительным главам математического анализа. — М.:
Наука, 1968.
89. Современные численные методы решения обыкновенных дифференциальных
уравнений. Под редакцией Дж. Холла и Дж. Уатта. — М.: Мир, 1979. — 312 с.
90. Степанов В. В. Курс дифференциальных уравнений. — М.: Гиз. физ.-мат. лит-ры, 1958.
Мехматовский учебник, очень старый (основнойуровень соответствует началу прошлого
века), но из тех, что не стареют, — и потому многократно переиздавался. Л. С. Понтрягин
в середине прошлого столетия создал свой более современный курс, на основе которого
написал свой учебник, вследствие чего на мехмате МГУ разгорелись жаркие споры
по вопросу том, допустимо ли опустить в курсе дифференциальных уравнений все то
устаревшее, что так усердно зубрили предыдущие поколения. В МГУ во всяком случае
победили консерваторы, и данный учебник использовался до семидесятых годов, а во
многих университетах и много лет после.
91. СТОКЕР Дж. Нелинейные колебания в механических и электрических системах, — М.:
ИЛ, 1952.
978 Литература для дальнейшего изучения
92. ТйТЧМАРШ Е. Разложения по собственным функциям, связанные с
дифференциальными уравнениями второго порядка, — Ч.I. — М..ИЛ, I960. —Ч.П. —М.:ИЛ, 1961.
93. Тихонов А. Н., Васильева А. Б., Свешников А. Т. Дифференциальные уравнения.
94. Трикоми Ф. Дифференциальные уравнения. — М.: ИЛ, 1962.
95. ФАРЛОУ С. Уравнения с частными производными для научных работников и
инженеров.
96. ФИЛИППОВ А. Ф. Сборник задач по дифференциальным уравнениям. — М.: Наука. —
128 с.
97. ФИХТЕНГОЛЫД Г. М.Курс дифференциального и интегрального исчисления.—У1.\ Наука,
1966. Многократно переиздававшийся весьма обстоятельный (трехтомный!)
классический курс.
98. Хартман Ф. Обыкновенные дифференциальные уравнения. — М.: Мир, 1970. Нет
сомнения, это превосходное учебное пособие, но начинающим оно может показаться
перегруженным деталями. Насоятельно рекомендую его для старшекурсников.
99. ХЕЙЛ Дж.Колебания в нелинейных системах. — М.: ИЛ, 1966.
100. ЧЕЗАРИ Л. Асимптотическое поведение и устойчивость решений обыкновенных
дифференциальных уравнений. — М.: ИЛ, 1964.
101. Шилов Г. Е., Гуревич Б. Л. Интеграл, мера и производная. Общая теория. — М.:
Наука, 1967.
102. ШТЕТТЕР X. Анализ методов дискретизации для обыкновенных дифференциальных
уравнений. — М.: Мир, 1978. —451 с.
103. ШТОКАЛО И. 3. Операционное исчисление. — К.: Наук, думка, 1972. — 303 с.
104. ЭЙЛЕР Л. Интегральное исчисление. — Т. I. — М.: Гостехиздат, 1956. — 415 с.
105. ЭЙЛЕР Л. Интегральное исчисление. — Т. II. — М.: Гостехиздат, 1957. — 368 с.
106. ЭЙЛЕР Л. Метод нахождения кривых линий, обладающих свойствами максимума либо
минимума. — М.-Л.: Гостехиздат, 1934. — 600 с.
107. ЭЛЬСГОЛЬЦ Л. Э. Дифференциальные уравнения и вариационное исчисление. — М.:
Наука, 1969.
108. Эльсгольц Л. Э. Дифференциальныеуравнения.—М.-Л., ГИТЛ, 1957. Университетский
учебник для физиков.
109. ЭЛЬСГОЛЬЦ Л. Э., НОРКИН С. Б. Введение в теорию дифференциальных уравнений
с отклоняющимся аргументом. — М.: Наука, 1971. — 296 с.
ПРИЛОЖЕНИЕ
Существование и единственность
решений
В главе 1 мы видели, что задача Коши (задача с начальными условиями) в виде
0 = /(*,V), V(a) = b A)
может не иметь единственного решения на данном интервале, содержащем точку х = а.
Например, ответ на задачу 33 в разделе 1.3 говорит, что задача Коши (задача с начальными
условиями)
х2£ + у2 = 0, У@) = 6 B)
не имеет никаких решений вообще, если не выполнено равенство 6 = 0; если же это
равенство выполнено, то решений бесконечно много. Согласно задаче 31 из раздела 1.3, задача
Коши (задача с начальными условиями)
|и_уТ^д „(о) = 1 О)
имеет два различных решения у\(х) = 1 и уг(^) = cos я на интервале 0 _ х _ тт. В этом
приложении мы укажем достаточные условия (они будут относиться к функции / (#, у)), при
выполнении которых можно гарантировать, что задача Коши (задача с начальными
условиями) A) имеет одно и только одно решение, а затем установим соответствующие версии
теорем единственности и существования, которые были сформулированы без
доказательства в разделах 1.3,3.1,3.2и4.1.
АЛ. Существование решений
Подход, который мы используем — это метод последовательных приближений, который
был развит французским математиком Эмилем Пикаром A856-1941). Этот метод базируется
на том факте, что функция у(х) является решением задачи Коши (задачи с начальными
условиями) A) на открытом интервале /, содержащем точку х = а, тогда и только тогда,
когда она удовлетворяет интегральному уравнению
у(х) = Ь+[Х f(t,y(t))dt D)
980 Приложение
для всех х в этом интервале I. В частности, если у (х) удовлетворяет уравнению D), то ясно,
что у (а) = Ь9 и дифференцирование обеих частей равенства D) в соответствии с
фундаментальной теоремой анализа приводит к дифференциальному уравнению у'(х) = /(х, у (х)).
Мы попытаемся решить уравнение D), взяв в качестве начальной функции
у0(х) = Ь, E)
а затем определим рекуррентную последовательность функций уь у2, уз, • • •, которая, как
мы надеемся, будет сходиться к решению. По определению, мы полагаем
гХ гХ
У1(х) = Ь+\ f(t,y0(t))dt и у2(х) = Ъ+\ f(t,yi(t))dt. F)
Ja Ja
Вообще, Уп+i получается подстановкой уп вместо у в правую часть уравнения D):
yn+i{x) = b+ \ f(t,yn(t))dt. J G)
Ja
Предположим, что мы знаем, что каждая из этих функций {уп (х) }£° определена на некотором
открытом интервале (одном и том же для всех п), содержащем точку х = а, и что предел
у(х) = lim yn(x) (8)
п—юо
существует в каждой точне этого интервала. Тогда из этих предположений будет следовать,
что
v [ у(х) = lim yn+i{x) = lim \b+\ f{t,yn(t))dt\ =
п—юо п—»оо I J I
= Ь+ lim [ f(t,yn(t))dt= (9)
n—°°Ja
= b+\ f(t, lim yn(t))dt A0)
y(x) = b+\ f(t,y(t))dt .
Ja
при условии, что мы можем оправдать законность изменения поряка операций предельного
перехода, которое использовалось при переходе от (9) к A0). Поэтому разумно ожидать, что,
при благоприятных условиях, последовательность {уп(х)}, определенная рекуррентными
соотношениями E) и G), будет сходиться к решению у(х) интегрального уравнения D),
и, следовательно, к решению первоначальной задачи Коши (задачи с начальными
условиями) A).
и, следовательно,
Пример 1
Чтобы применить метод последовательных приближений к задаче Коши
(задаче с начальными условиями)
- fx=y> «w-1' (")
Приложение 981
мы напишем уравнения E) и G) и таким способом получим
у0(х) = 1, yn+i(x) = 1 + yn(t) dt. A2)
Jo
Итеративная формула A2) дает
2/i (x) = 1 + ldt = l + x,
Jo
2/2(ж) = 1+ A + t) <tt = 1 + ж + \х2,
Jo
j/з(ж) = 1+| A + t + |t2) dt = 1 + x + \x2 + |z3
Jo
У4
(x) = 1 + f A +t + |t2 + |t3) dt =
Jo
= l + x+±x2 + |:r3 + ^x4.
Ясно, что мы получили последовательность частичных сумм
степенного ряда, являющегося решением; действительно, мы немедленно
распознаем этот ряд как ряд функции у(х) = ех. Совсем нетрудно показать,
что экспоненциальная функция действительно является решением
задачи Коши (задачи с начальными условиями) A1); кроме того, прилежный
студент может проверить (используя доказательство методом индукции
по п), что функция уп(х), полученная таким способом, действительно
является n-й частичной суммой ряда Тейлора в точке х = О для функции
у(х) = ех. Ш
Чтобы применить метод последовательных приближений к задаче Коши
(задаче с начальными условиями)
^=4ху, 1/@) = 3, A3)
мы, как и в примере 1, запишем равенства E) и G). Теперь мы получаем
Уо{х) = 3, yn+i(x) = 3+| Uyn{t)dt. A4)
Jo
Итеративная формула A4) приводит к равенствам
« сх
2/i(a0 = 3+ Dt)C)cft = 3 + 6x2,
Jo
У2(х) = 3+( Dt)C + 6t2) dt = 3 + 6x2 + 6x4,
Jo
rX
j(ж) = 3 + Dt)C + 6t2 + 6t4) dt = 3 + 6x2 + 6x4 + 4x6,
Jo
Уз I
982 Приложение
и
У4(х) = з + [ D*)C + 6£2 + 6£4 + 4*6) dt =
Jo
= 3 + 6z2 + 6a:4 + 4x6 + 2x8.
Снова ясно, что мы получили частичные суммы степенного ряда,
являющегося решением. Совсем не очевидно, какая именно функция имеет
такое представление в виде степенного ряда, но задача Коши (задача с
начальными условиями) A3) легко решается разделением переменных:
У(а;) = 3ехрBх2)=з£^ =
71=0
= 3 + 6х2 + бх4 + 4х6 + 2xs + f х10 + • • • . ■
В некоторых случаях необходимо вычислить намного большее количество членов для
того, чтобы идентифицировать решение или использовать частичную сумму ряда, чтобы
найти приближенное решение в точке х, находящейся в некоторой окрестности начального
значения. К счастью, системы компьютерной алгебры типа Maple и Mathematica могут
выполнить интегрирование в символическом виде (а не только численное интегрирование)
выражений того сорта, что встретились нам в примерах 1 и 2. В случае необходимости,
в примере 2 вы могли сгенерировать первую сотню членов всего лишь за несколько минут.
Конечно, в общем случае мы применяем метод Пикара именно потому, что мы не
можем найти решение элементарными методами. Предположим, что мы вычислили большое
количество членов того, что, как мы верим, является правильным разложением решения
в степенной ряд. Мы должны иметь условия, при которых можно заранее гарантировать,
что последовательность {уп(х)}9 вычисленная методом последовательных приближений,
будет сходиться к решению. Эту проблему удобно обсудить в форме задачи Коши (задачи
с начальными условиями)
dx
— =f(x,t), x(a)=b A5)
для системы т уравнений первого порядка, где
Г Х\ '
Х2
хз
L Х>т т
, f =
"/Г
/з
/з
. * т .
и
Ь =
"&i"
Ь2
h
_Ьт }
Оказывается, что с помощью этой векторной системы обозначений (мы ввели ее в
разделе 5.1), большинство результатов, касающихся одного [скалярного] уравнения х' = /(ж, t),
легко обобщить и в результате такого обобщения мы придем к аналогичным результатам
для системы т уравнений первого порядка, сокращено записанных в виде векторного
уравнения A5). Следовательно, усилия, направленные на использования векторной системы
обозначений, в достаточной степени оправдываются общностью, которую обеспечивает
такая система обозначений.
Приложение 983
В соответствии с методом последовательных приближений для системы A5) необходимо
вычислить последовательность {хп(£)}£° векторнозначных функций от t,
Хп(^)
определенных рекуррентными соотношениями
x0(a) = b, xn+i(t) = b + f (xn(s), s) ds.
Ja
Вспомните, что векторнозначные функции интегрируются покомпонентно.
A6)
Пример 3
Рассмотрим m-мерную задачу Коши (задачу с начальными условиями)
A7)
§ = Ах, х@) = Ъ
для однородной линейной системы с постоянной матрицей
коэффициентов А размера тх т. Равенства A6) примут вид
xo(t) = b, xn+i=b +
Ахп(
Jo
s) ds.
A8)
Таким образом,
xi(t) = b + ( Abds = b + АЫ = A + At)b;
Jo
x2(t) = b + [ A(b + Abs) ds = b + АЫ + |А2Ы2
Jo
= (I + At+|A2t2)b
x3(t) = b + [ A(b + Abs + \A2bs2)
= (I + A*+±A2*2 + ±A3*3)b.
Таким способом мы получили несколько первых частичных сумм
решения, являющегося экспоненциальным рядом
X
(()=е*.ь=(£(^:и.
\п=0
П\
A9)
Этот ряд представляет собой решение задачи A7); оно было получено
ранее в разделе 5.5. ■
984 Приложение
Ключевая идея в установлении сходимости метода последовательных приближений
состоит в том, чтобы найти соответствующее условие на скорость, с которой изменяется f (x, t)
при изменении х в предположении, что t считается фиксированным. Пусть R — область
в (га + 1)-мерном пространстве (х, t). Тогда функция f (x, t) называется удовлетворяющей
условию Липшица (непрерывной по Липшицу) на Д, если существует константа к > О,
такая что
|f(Xi,t)-f(X2,t)|^fc|xi-X2|
B0)
для любых точек (xi, t) и (х2, t) из области R. Вспомните, что норма точки или вектора х
в m-мерном пространстве определена как
C| = ^f
2 + хЪ + х\ +
+ xi
B1)
Так что |xi — Х21 — просто евклидово расстояние между точками xi и х2.
Пример 4
Пусть /(ж, t) = х2 ехр (—£2) sint и пусть R представляет собой ленту
0 S % ^ 2 в плоскости ху. Если {х\, t) и (х2, £) — две точки в области R,
то
|/(xi, t) - /(а?2, *)| = | ехр (-£2) sint| • |a?i + ж2| • \хг -х2\й 4|a?i - я?2|,
потому что |ехр (—£2) smt\ ^ 1 для всех t и |#i -f ж21 ^4, если обе точки
х\ иж2 лежат в интервале [0,2]. Таким образом, /удовлетворяет условию
Липшица B0) при к = 4 и поэтому является непрерывной по Липшицу
на ленте Д. ■
Пример 5
Пусть/(ж, i) = ^у^напрямоугольникеДкоторыйсостоитизточек^,^)
плоскости xt, для которых 0 5*ж^1и0^£5*.1. Тогда, взяв х\ = х,
Х2 = 0 и t = 1, мы находим, что
|/(*,1)-/@,1)|
у/х = —=|ж •
01.
Поскольку х-1/2 —> Н-оо при х —> 0+, мы видим, что условие
Липшица B0) не может быть удовлетворено ни при какой (конечной) константе
к > 0. Таким образом функция /, хотя и (это очевидно!) непрерывна на
Д, не удовлетворяет условию Липшица (не является непрерывной по
Липшицу) на R. ■
Предположим, однако, что функция /(я, t) имеет непрерывную частную производную
/х(х, t) на замкнутом прямоугольнике R в плоскости xt9 и обозначим через к максимальное
значение | fx (х, t) | на R. Тогда формула Лагранжа из дифференциального исчисления влечет
|/(ж1,*)-/(ж2,*)| = |/*(ж,*)-(Ж1 -Ж2)|
для некоторого ж в (х\, х2), а из этого следует, что
\f\xut) - f(x2,t)\ йк\хг -х2|,
Приложение 985
потому что \fx(x,t)\ ^ к. Таким образом, определенная на замкнутом прямоугольнике
непрерывно дифференцируемая функция f(x,t) удовлетворяет условию Липшица
(непрерывна по Липшицу) на этом прямоугольнике. Более того, с помощью известной из
дифференциального исчисления функций многих переменных формулы Лагранжа для
функций многих переменных можно подобным способом доказать более общее утверждение:
веюпорнозначная функция f (x, t) с непрерывно дифференцируемыми компонентами
(составляющими функциями) на замкнутой прямоугольной области R в пространстве (х, i)
удовлетворяет условию Липшица (непрерывна по Липшицу) на R.
Пример 6
Функция f(x, t) = х2 удовлетворяет условию Липшица (непрерывна по
Липшицу) на любой закрытой [ограниченной] области в плоскости xt.
Но рассмотрим эту функцию на бесконечной ленте R, состоящей из точек
(ж, t), для которых 0 ^ t ^ 1, а х является произвольным. Тогда
|/(ж1,*)-/(ж2,*)| = \х\ -х\\ = \xi +х2\ • \хг -х2\.
Поскольку \х\ + Х21 можно сделать произвольно большим, из этого
следует, что / не удовлетворяет условию Липшица (не является непрерывной
по Липшицу) на бесконечной ленте R. ■
X
MMif^x^::i-tik..-rik
l&m'^Y^^m
t
Рис. АЛ. Бесконечная полоса
в G71 + 1)-мерном пространстве
Пусть /—интервал на оси t, тогда множество всех точек (х, t), для которых t принадлежит
интервалу /, представляет собой бесконечную полосу, или брус в (га +1)-мерном
пространстве (рис. АЛ). Пример 6 показывает, что условие Липшица (непрерывность по Липшицу)
f (x, t) на такой бесконечной плите (бесконечном брусе)—очень сильное условие. Но если на
функцию f наложить такое сильное условие, т. е. потребовать, чтобы функция f
удовлетворяла условию Липшица (условию непрерывности по Липшицу) на таком брусе, то отсюда
будет следовать существование решения задачи Коши (задачи с начальными условиями)
dx.
f(x, £), х(а) = Ь.
A5)
986 Приложение
Несмотря на столь стеснительное условие, существование решения этой задачи имеет
огромное значение.
Теорема 1
Глобальное существование решений
Пусть f будет векторнозначной функцией (с т компонентами) от т + 1 вещественной
переменной и пусть / будет [ограниченным или неограниченным] открытым интервалом,
содержащим точку t = а. Если f (x, t) непрерывна и удовлетворяет условию Липшица B0)
для всех t из интервала I и для всех xi и Х2, то задача Коши (задача с начальными
условиями) A5) имеет решение на [всем] интервале I.
Доказательство. Мы хотим показать, что последовательность {хп(£)}£°
последовательных приближений, определенных рекуррентными соотношениями
х0(а) = b, Xn+i(t) = b + f (xn(s), s) ds,
Jo
A6)
сходится к решению х(£) задачи A5). Мы видим, что каждая из этих функций в свою очередь
непрерывна на интервале I, поскольку каждая из них представляет собой [неопределенный]
интеграл от непрерывной функции.
Мы можем предположить, что а = 0, потому что преобразование t —> t + а превращает
задачу A5) в эквивалентную задачу с начальной точкой t = 0. Кроме того, мы рассмотрим
только часть t ^ 0 интервала /; детали для случая t ^ 0 очень подобны.
Главная часть доказательства состоит в том, чтобы показать, что если [0, Т] является
замкнутым (и ограниченным) интервалом, содержащимся в J, то последовательность {хп(£)}
сходится равномерно на [0, Т] к предельной функции х(£). Это означает, что для заданного
б > 0 существует целое число N, такое что
\xn(t)-x(t)\<e B2)
для всех n ^ Nn всех t из [0, Т]. Для обыкновенной (возможно неравномерной) сходимости
целое число N, при котором B2) выполняется для всех n ^ N, может зависеть от t, причем
значение N, пригодное для всех t из /, может отсутствовать. Но если равномерная
сходимость последовательности {хп(£)} установлена, следующие заключения будут следовать
из стандартных теорем анализа (см. с. 620-622 из учебника анализа Тейлора и Манна, 3-е
издание которого вышло в Нью-Йорке в 1983 году (А. Е. Taylor and W. R. Mann, Advanced
Calculus, 3rd ed. (New York: John Wiley, 1983))).
1. Предельная функция x(t) непрерывна на [0, T].
2. Если N выбрать так, что неравенство B2) выполняется при п ^ N, то из того, что f
удовлетворяет условию Липшица (непрерывна по Липшицу), следует, что
|f(xn(*),t) -f(x(t),t)| й k\xn(t) -x(t)| < ke
для всех t из [0, Т] и п ^ N, так что из этого следует, что последовательность
{f (xn(£), t)}™ сходится равномерно к f (x(£), t) на [0, Г].
3. Но равномерно сходящуюся последовательность или ряд можно интегрировать
почленно, а из этого следует, что при взятии пределов в рекуррентной формуле
Приложение 987
в A6),
с(£) = lim xn+i(£) = b+ Hm f(xn(s), s)ds =
n—юо n—юо Jq
= b +
таким образом,
lim f(xn(s),s)ds;
c(t) = b+ f(x(s),s)ds.
Jo
B3)
4. Поскольку функция х(£) непрерывна на [О, Т], интегральное уравнение B3)
(аналогичное одномерному случаю в D)) приводит к тому, что х'(£) = f (х(£), £) на [О, Т].
Но если это истинно на каждом замкнутом подынтервале открытого интервала J, то
это истинно и на всем интервале I.
Прэтому остается только доказать, что последовательность {хп(£)}£° сходится
равномерно на замкнутом интервале [О, Т]. Пусть М — максимальное значение функции |f (b, t) \
для t из [О, Т]. Тогда
|xi(t) - xo(t)| = I [ f (xo(e), s) ds\ й [ |f (b, 5)| ds ^ Mt. B4)
I Jo I Jo
Далее,
lx2
и, следовательно,
(t) -xi(t)| = f [f(xi(e),e) -f(xo(e),e)]ds ^ fc [ |xi(e) -xo(e)|de,
Uo " I Jo
|x2(t) - xi(t)| £ fc [ Msds = ±fcM*2.
Jo
Мы теперь переходим к шагу индукции. Примем, что
IXnW-X^-iWI^ — •
Af (fct)n
к п\
B5)
B6)
Тогда из этого следует, что
If*
|Xn+i(t)-Xn(t)| = f(xn(s),s) -f(Xn-.i(s),5)]d5
Uo
^fc |xn(s)-Xn_i(s)|ds;
Jo
|xn+i(t)-xn(*)|^fcf ^-^Л.
Jo я n!
<
следовательно,
988 Приложение
А после оценки этого интеграла следует, что
Таким образом, B6) справедливо на интервале [О, Т] для всех п ^ 1.
Следовательно, члены бесконечного ряда
хо№ + Yl IX^W - xn-iW) B7)
n=l
мажорируются (по величине на интервале [О, Т]) членами сходящегося ряда
^ к (п + 1)! И J' l ;
П=1 V У
который является рядом положительных констант. Поэтому отсюда по признаку Вейер-
штрасса (см. с. 618-619 учебника Тейлора и Манна) следует, что ряд в B7) сходится
равномерно на [О, Г]. Но последовательность частичных сумм этого ряда как раз и есть наша
первоначальная последовательность {хп(£)}£° последовательных приближений, так что
доказательство теоремы 1 наконец можно считать законченным. А
А.2. Линейные системы
Важным приложением только что доказанной глобальной теоремы существования является
ее применение к задаче Коши (задаче с начальными условиями)
dx
— = A(t)x + g(t), х(а)=Ь B9)
для линейной системы, где m х m-матричная функция А (t) и векторнозначная функция g (t)
непрерывны на [ограниченном или неограниченном] открытом интервале /, содержащем
точку t = а. Чтобы применить теорему 1 к линейной системе в B9), сначала мы обращаем
внимание, что доказательство теоремы 1 требует только, чтобы для каждого закрытого
ограниченного подынтервала J интервала / существовала константа к, для которой выполняется
условие Липшица, т. е. такая, что
|f(xbt)-f(x2,t)|^fc|Xl-x2| B0)
для всех t из J (и всех Xi и х2). Таким образом, нам не нужна единая константа, для которой
выполняется условие Липшица для всего открытого интервала /.
Из B9) мы имеем f (x, t) = А(£)х + g, так что
f(xb*) - f(x2,t) = A(t)(xi - х2). C0)
Поэтому достаточно показать, что если A(t) непрерывна на замкнутом ограниченном
интервале J, то существует константа к, такая что
|A(t)x| ^fc|x| C1)
Приложение 989
для всех t из J. Но это следует из того факта (задача 17), что
|Ах| й ||А|| • |х|, C2)
где норма || А|| матрицы А определена как
/ m \1/2
ЦАц= [ Т,ы2) • C3)
Поскольку А(£) непрерывна на замкнутом ограниченном интервале J, норма этой матрицы
11А11 ограничена на J, так что справедливо равенство C1), что и требовалось. Таким образом,
мы доказали следующую глобальную теорему существования для линейной задачи Коши
(задачи с начальными условиями) B9).
Теорема 2
Существование решения для линейных систем
Пусть т х га-матричная функция A(t) и векторнозначная функция g(£) непрерывны на
[ограниченном или неограниченном] открытом интервале /, содержащем точку t = а. Тогда
задача Коши (задача с начальными условиями)
— =A(t)x + g(t), x(a)=b B9)
имеет решение на [всем] интервале /. А
Как мы видели в разделе 4.1, задача Коши (задача с начальными условиями) m-го порядка
х(т) + а1(ф(т-1) + • • • + Om-i(t)xf + am(t)x = p(t),
C4)
х(а) = Ьо, х\а) = ЬЪ ... , х(т_1)(а) = 6m_i
может быть легко преобразована в эквивалентную систему размера т х т, имеющую
вид B9). Поэтому из теоремы 2 следует, что если все функции а\ (£), а^ (t),..., am(t) и p(t)
в C4) непрерывны на [ограниченном или неограниченном] открытом интервале /,
содержащем точку t = а, то задача Коши (задача с начальными условиями) C4) имеет решение на
[всем] интервале /.
А.З. Локальные теоремы существования
В случае нелинейной задачи Коши (задачи с начальными условиями)
— =f(x,t), x(a)=b, C5)
условие теоремы 1, заключающееся в том, что f удовлетворяет условию Липшица на брусе
(х, t) (t из i", любые значения х), нереалистично и редко выполняется на практике. Это легко
проиллюстрировать следующим простым примером.
990 Приложение
Пример 1
Рассмотрим задачу Коши (задачу с начальными условиями)
dy
х2, ж@) = Ь>0. C6)
Как мы видели в примере 6, для уравнения х' — х2 условие
Липшица на ленте не выполняется. Решая уравнение C6) методом разделения
переменных, находим его решение
Ф) = ^ C7)
Поскольку знаменатель обращается в нуль для t = 1/6, уравнение C7)
дает решение задачи Коши (задачи с начальными условиями) C 6) только для
t < 1/b, несмотря на тот факт, что дифференциальное уравнение х! — х2
выглядит вполне прилично на всей вещественной оси — ведь функция,
появляющаяся в правой части уравнения, является непрерывной всюду.
В частности, если Ь является большим, то мы имеем решение только на
очень маленьком интервале справа от t = 0.
■
Хотя теорема 2 уверяет нас, что линейные уравнения имеют глобальные решения,
пример 7 показывает, что, вообще говоря, даже "хорошее" нелинейное дифференциальное
уравнение может иметь решение только на маленьком интервале в окрестности начальной точки
t = а, причем длина этого интервала существования решения может зависеть от начального
значения х(а) = Ь, так же как и от самого дифференциального уравнения. Причина состоит
вот в чем: если f (x, t) непрерывно дифференцируема в окрестности точки (Ь, а) в (га + 1)-
мерном пространстве, то, как указано при обсуждении предыдущего примера 6, мы
можем заключить, что f (x, t) удовлетворяет условию Липшица на некоторой прямоугольной
области R с центром в точке (Ь, а), причем область имеет вид
|*-а|<А, \х{-Ь{\<В{ C8)
(г = 1,2,..., га). В доказательстве теоремы 1 мы должны воспользоваться условием
Липшица на функцию f при анализе рекуррентной формулы
cn+i(t) = b+ f(xn(s),s)ds.
Ja
C9)
Потенциальная трудность состоит в том, что если значения t не ограничены подходящим
образом, то точка (хп(£),£), появляющаяся в подынтегральном выражении в C9), может
не лежать в области R, в которой f (по предположению) удовлетворяет условию
Липшица. С другой стороны, можно показать, что на достаточно маленьком открытом интервале
J, содержащем точку t = а, графики функций {хп(£)}, построенных с помощью
рекуррентной формулы C9), остаются в пределах области Д, так что доказательство сходимости
может тогда быть проведено так, как доказательство теоремы 1. Доказательство
следующей локальной теоремы существования может быть найдено в главе 6 2-го издания курса
обыкновенных дифференциальных уравнений Биркгофа и Рота, вышедшем в Нью-Йорке
в 1969 году (G. Birkhoff and G.-C. Rota, Ordinary Differential Equations, 2nd ed. (New York:
John Wiley, 1969)).
Приложение 991
Теорема 3
Локальное существование решений
Пусть f — векторнозначная функция (с га компонентами) от га + 1 вещественного
переменного xi, X2, ..., хт и t. Если все частные производные первого порядка функции f
существуют и непрерывны в некоторой окрестности точки х = b, t = а, то задача Коши
(задача с начальными условиями)
dx
— =f(x,t), x(a)=b, C5)
имеет решение на некотором открытом интервале, содержащем точку t = a. A
АЛ. Единственность решений
Можно установить существование решений задачи Коши (задачи с начальными
условиями) C5) при намного более слабом предположении: достаточно предположить, что функция
f (x, t) является просто непрерывной. Однако для доказательства этого факта требуются
методы, отличные от используемых в этом разделе. Но условие Липшица, которое мы
использовали в доказательстве теоремы 1, все же является ключевым в доказательстве
единственности решений. В частности, решение, существование которого гарантирует теорема 3,
единственно в окрестности точки t — а.
Теорема 4
Единственность решений
Предположим, что в некоторой области R, лежащей в (га +1) -мерном пространстве^функция
f в C5) непрерывна и удовлетворяет условию Липшица
|f(xi,t)-f(x2;t)|^fc-|xi-x2|. B0)
Если xi (t) и Х2 (t) — два решения начальной задачи C5) на некотором открытом интервале
I, содержащем точку х — а, такие что обе интегральные кривые (xi (£), t) и (х2 (t), t) лежат
в R для всех t из /, то xi (t) = Х2(£) для всех £ из i". A
Мы укажем основные этапы доказательства теоремы 4 для одномерного случая, в котором
х является вещественной переменной. Обобщение этого доказательства на многомерный
случай может быть найдено в главе 6 книги Биркгофа и Рота.
Давайте рассмотрим функцию
ф{€) = [x1(t)-x2(t)]2, D0)
для которой ф(а) = 0, потому что х\{а) = #2(а) = Ь. Мы хотим показать, что 0(f) = 0, так
что х\(t) = X2(t). Мы рассмотрим только случай t ^ а; все детали выглядят точно так же
и для случая t ^ a.
Если мы продифференцируем каждую часть равенства D0), мы получим
\4>'{t)\ = \2[x1(t)-x2(t)].[x'1(t)-x'2{t)}\ =
= |2[*x(t) - x2(t)) ■ [/(xi(t),t) - f(x2(t),t)}\ й
^ 2k\x!{t) - x2(t)\2 = 2кф(г)
992 Приложение
с учетом условия Липшица для /. Следовательно,
ф\€) й 2кф(Ь). D1)
Теперь временно гфоигнорируем тот факт, что ф(а) = 0, и сравним </>(£) с решением
дифференциального уравнения
Ф'(*) = 2ЛФ(*), D2)
таким что Ф(а) = ф(а); ясно, что
Ф(*) = Ф(а)е2*<*-в>. D3)
Сравнивая D1) с D2), обнаруживаем, что
0(*)^Ф(*) для^а, D4)
и это легко доказать (задача 18). Следовательно,
О й [xi(t) - x2(t)}2 £ [хг(а) - х2(а)]2е2к«-а\
Извлекая квадратные корни, получаем
О ^ \xi(t) - x2(t)\ ^ Ыа) - х2(а)\ек^-а\ D5)
Но х\ (а) — Х2 (а) = 0, так что из D5) следует тождество х\ (t) = x2 (t).
Пример 1
Задача Коши (задача с начальными условиями)
$=3х2/3, х@)=0 D6)
at
имеет два решения: очевидное решение х\ (t) = О и решение х2 (t) = t3%
которое легко найти методом разделения переменных. Следовательно,
, функция /(х, t) не удовлетворяет условию Липшица в окрестности
начала координат @,0). Действительно, формула Лагранжа дает
|/(Ж,0)-/@,0)| = |/ж(х,0)|.|^-Р|
для некоторого х между 0 и х. Но функция /ж(ж, 0) = 2ж-1/3
неограничен при х —► 0, так что условие Липшица действительно не может быть
выполнено. ■
А.5. Корректно поставленные задачи
и математические модели
Кроме единственности, другое следствие неравенства D5) состоит в том, что решения
дифференциального уравнения
f = /0M) D7)
Приложение 993
зависят непрерывно от начального значения х(а); иными словами, если х\ (t) и X2(t) — два
решения уравнения D7) на интервале a 5S t ^ T, такие что начальные значения х\ (а) и ж2 (а)
достаточно близки, то значения х\ (t) и #2 00 также остаются близкими. В частности, если
\х\ (а) — Х2 (а) | ^ 5, то из D5) следует, что
\xi(t) - x2(t)\ й 6ек(т~а) = б D8)
для всех £, таких что a^t^T. Очевидно, мы можем сделать е очень маленьким, выбирая S
достаточно близким к нулю*
Эта непрерывность решений уравнения D7) относительно начальных значений важна
в практических приложениях, где мы едва ли будем знать начальное значение хо = х(а)
с абсолютной точностью. Например, предположим, что задача Коши (задача с начальными
условиями)
dx
— =/(М), х(а)=х0 D9)
моделирует численность популяции, о которой мы знаем только то, что начальная
численность популяции отклоняется не более чем на 8 > О от принятого значения xq. Тогда, даже
если функция f(x,t) выражает точно численность популяции, решение x(t) задачи D9)
будет только аппроксимацией к фактической численности популяции. Но из D5) следует,
что фактическая численность популяции в момент времени t будет отличаться не более чем
на 6ек(т~а) от приблизительной численности популяции x(t). Таким образом, на данном
замкнутом интервале [а, Т] значение x(t) будет близкой аппроксимацией к фактической
численности популяции при условии, что 6 > 0 является достаточно малым.
Задачу Коши (задачу с начальными условиями) обычно считают корректно
поставленной в качестве математической модели для ситуации из реального мира, только если
дифференциальное уравнение имеет единственные решения, которые являются непрерыв-*
ными относительно начальных значений. Иначе маловероятно, что задача Коши (задача
с начальными условиями) адекватно отражает ситуацию в реальном мире.
Часто желательна даже более сильная "непрерывная зависимость" решений. В
дополнение к возможной погрешности в начальном значении функция /(ir, t) может неточно
моделировать физическое явление. Например, она может содержать физические параметры
(вроде коэффициентов сопротивления), чьи значения не могут быть измерены с абсолютной
точностью. В книге Биркгофа и Рота обобщается доказательство теоремы 4 и
устанавливается справедливость следующего результата.
Теорема 5
Ч^^°^%^;Л?-*№ *£■«
Непрерывная зависимость решений
Пусть х(£) и у (£) — решения уравнений
f =f(x,«) и ^=g(y,«) E0)
на замкнутом интервале [а, Т]. Пусть fng непрерывны для а ^ t ^ Тидляхиувобщей
области D n-мерного пространства; предположим, что f удовлетворяет условию Липшица B0)
в области D. Если
|f(M)-g(M)I^M E1)
994 Приложение
для всех t в интервале [а, Т] и всех z в £>, то
|х(«) - y(t)| й |х(а) - у(о)| • е*<*-> + £ [е*<«-> - l] E2)
на интервале [а, Т]. А
Если /х > 0 является малым, то из E1) следует, что функции f и g, входящие в эти два
дифференциальные уравнения, хотя и отличаются, являются "близкими". Если задано е > О,
то очевидно, что из E2) следует, что
|x(t)-y(t)|^€ E3)
для всех t в [а, Г], если |х(а) — у (а) | и /li являются достаточно маленькими. Таким образом,
несколько упрощенно теорему 5 можно сформулировать так: если два начальных значения
и два дифференциальных уравнения в E0) близки, то и решения этих двух задач остаются
близкими для а ^ t й Т.
Предположим, например, что на падающее тело действует постоянное гравитационное
ускорение д9 причем сопротивление пропорционально некоторой степени его скорости, так
что (считая положительную ось направленной вниз) его скорость v удовлетворяет
дифференциальному уравнению
^=g-CV<>. E4)
Примем, однако, что известны только аппроксимация с к фактическому сопротивлению
с и аппроксимация ~р к фактическому показателю степени р. Тогда наша математическая
модель базируется на дифференциальном уравнении
^ = 9-си\' E5)
а не на фактическом уравнении E4). Таким образом, если мы решаем уравнение E5), мы
получаем только аппроксимацию u(t) к фактической скорости v(t). Но если параметры
сир достаточно близки к фактическим значениям с и р, то правые части в E4) и E5)
будут близкими. А если это так, то из теоремы 5 следует, что функция v(i), выражающая
фактическую скорость, и функция u(t), выражающая приблизительную скорость, близки
одна к другой. В этом случае аппроксимация в E5) будет хорошей моделью реального
физического явления.
1.5. Задачи
В задачах 1-8 с помощью формулы для последовательных приближений вычислите уп(х) для п ^ 4.
Затем запишите экспоненциальный ряд, для которого эти аппроксимации являются частичными
суммами (возможно, первый член или далее первые два будут отсутствовать; например,
ех - 1 = х + \х2 + \хъ + ^х4 + • • •).
1. ^|=2/, У@) = 3 2. £ = -2у,у@) = 4
Приложение 995
3. £ = -2ху, у@) = 1
£ £=2у + 2,у(Ь)=0
4. g=3*2y,2/@) = 2
6. £=x + j/,y@) = 0
f. g = 2x(l.+ у), у@) = 0 8. g = 4z(y + 2x2), y@) = 0
В задачах 9-12 вычислите последовательные приближения уп(х) для п% 3;затем сравните их
с соответствующими частичными суммами ряда'Тёйлора точного решения.
9- ^=а; + у,у@) = 1
11.^,= у^@)=,1
Ю. ^-=y + ex,y@) = 0
dx
12- ^ = |У3,У@) = 1
13; CnbMomife итфационной формуль* ^(lo^BbMHCflHte первые три последовательных
приближения к решению задачи Коши (задачи с начальными условиями)
w. =z2x г- у, ж@)=*1;
^=^2^, 2/@) = -L
14. Применяя матричный экспоненциальный ряд в A9), найдите решение (в конечном виде) задачи
Коши (задачи с начальными условиями)
(Указание. Покажите сначала, что
1 1
0 1
х, х@) =
Г V
_о
Г
1
п
0
п
1
для каждого положительного целого числа п.)
15. Покажите, что вторая аппроксимация Пикара для задачи Коши (задачи С начальными
условиями) dy/dx = 1 -f у3,2/A) = 1 имеет вид
у2(х) .=р 1 + 2(ж- 1) + 3(х - IJ + 4(аг - IK + 2(х - IL.
Затем вычислите 2/2 A,1) и 2/2A,2). Метод Рунге-Кутта четвертого порядка при величине шага
h = 0,005 дает 2/A,1) « 1,2391 и 2/A,2) » 1,6269.
16. Покажите, что третья аппроксимация Пикара для задачи Коши (задачи с начальными
условиями) dy/dx = х2 + у2,2/@) = 0 имеет вид
у3(Х) = 1Х^1-Х7+-^Х11 + ^—Х15.
</3W 3^ f б3х 1- 2Q7Qx I- 59535^
Вычислите ^A). Метод Рунге^Кутта четвертого порядка приводит к значению 2/A) «0,350232
и при величине шага h = 0,05, и при величине шага h — 0,025.
996 Приложение
17. Докажите следующим образом неравенство |Ах| й ||А|| • |х|, где А — матрица размера т х
х т с векторами-строками ai, аг, ..., am, a x — вектор в га-мерном пространстве. Сначала
обратите внимание, что компоненты вектор» Ах равны а% • х; аз' • х,..; j am • х, так что
|Ах| =
Е(^-хJ
11/2
Затем примените неравенство Коши-Шварца (а • хJ ^ |а|2|х|2 для скалярного произведения.
18. Предположим, что <£(£) — дифференцируемая функция, причем
ф'(Ь) <: кф(Ь) (к > 0)
для t ^ а. Умножьте обе части на e~~kt, затем перенесите (с обратным знаком) члены в левую
часть и покажите, что
для t ^ а. Затем примените формулу Лагранжа и выведите, что
ф(г) ^ Ф(а)ек{*~а)
ДЛЯ t >jCL.
Ответы
к избранным задачам
Глава 1
Раздел \Л
11. Если у — ух = х~2, то у'{х) = —2х~3 и у" (х) = 6ж~~4, так что х2у" + бжу' + 4у = х2Fх~4) + 5ж(—
-2х~3) + 4(ж-2) = 6ж~2 - Юх~2 -f 4ж~2 = 0. Если у = у2 — х~2 In ж, то у'{х) = х~3 - 2х~3 lnrr
и у"(х) = —5а:-4 + 6аг-41пж, так что ж2?/" + bxtf + Ay = x2(—5x~4 + 6ж~41пж) + 5ж(ж_3 —
-2х~3\пх) + 4(х~2\пх) ^0. ^
13. г=§ 14. г = ±± 15. г = -2,1
16. r=i(-3±V57)
17. С = 2 18. С = 3
^0
U@,2)
* О
/'
1' /
.@,3)/ /
/ /
\ \
-5
19. С = 6
Ю|
* О
-5h
-10
-5
/ /
:
„^^^м***^* . - '
- '
КРЯ/
1
20. С = 11
<20
* О
-20
1 1
/ /
/ 1
__,
f @,10) \
/
/ /
■ - ■ ■ ■' •
-10
-5
10
998 Ответы к избранным задачам
21. С = 7
22. С = 1
10
^ 0
-5
-10
1 \ \ ч^
\ \
ч
/ /'"
I / /
Г / / /
\ ill
1 1 j
@,7)
* о
23. С = -56
30 г
20
10
* О
-10
-20
-30 I
/
1 ^"" - -^ \
'1 !
24. С = 17
30
20
10
* О
-10
-20
-30
1 ' '
1 /
/
/
&%/
\ Ч"^
\ Ч
\
[ \
\
1 ' Г 1 1—
/ /
' /
ч
~--_
\
X 1 ' 1 1
7
/
/
/
1 1
/ J
/
/
/-
•'"''
1, , .,
о
1 2
О 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
27. у' = х + у
31. 2/' = B/-*)/B/ + аО
35. dN/dt = k(P - N)
41. у = ±е*
26. С = -тг
10
* О
-10
г^\
i
/~
к
II/
f\\
\
ч ^
щ
i
>' "
\
„L, , ,,
\
\
ч
/
\ч J
10
28. у' = 2у/х
32. dP/dt = ку/Р
37. у = 1 or j/ = х
42. у = cos х или j/ = sin x
29. j/' = x/(l - j/)
33. dv/dt = kv2
39. ?/ = x2
Ответы к избранным задачам 999
43. (Ь) Тождественно равная нулю функция х@) = б
44. (а) Из графиков (см. рисунок ниже) типичных решений при к = | видно, что (каждое) значение x(t)
увеличивается неограниченно при увеличении t.
(b) Из графиков (см. рисунок ниже) типичных решений при к = — ^ видно, что теперь значение x(t)
приближается к 0 при неограниченном увеличении t.
45. P(t) = 100/E0 - t); P = 100, когда t = 49, и Р = 1000, когда t = 49,9. Таким образом, оказывается,
что P(t) возрастает неограниченно, когда t приближается к 50.
46. Щ) = 50/E + 2t); v = 1, когда t = 22,5, hv=^, когда t = 247,5. Таким образом, оказывается, что
v(t) приближается к 0 при неограниченном увеличении U
47. (а) С = 10,1; (Ь) Нет такого С, но постоянная функция у(х)
и 2/@) = 0.
Раздел 1.2
1. 2/(ж) = х2 + х + 3 *- "^ = -
3. 2/(*) = !B*3/2-16)
5. у(х) = 2у{х~+2 - 5
: 0 удовлетворяет условиям у' — у2
У(Х) = 1(Х-2Г
2.
4. у(х) = -1/х + Ъ
6. ?/(*) = §[(*2+9K/2
125]
7. у(ж) = 10 arctg ж
9. у(х) = sin-1 ж
11. x\t) = 25*2 + 10t + 20
13. ж(*) = |*3 -h 5*
15. x(t) = §(* + ЗL - 37* - 26
17. a?(t) = |[(t+l)-14t-l]
2/(ж) = |sin2x + l
8.
10. 2/(ж) = -(ж + 1)е-ж+2
12. ж(*) = -10t2 -Ш + 5
14. x{t) = \t* + \t-7t + ±
16. *(*)'= |(*^4K/2-5*-f
1000 Ответы к избранным задачам
19. X(t) :
J5t,
\ 10t-I**-f,
если 0 < t < 5,
если 5 < t < 10.
40
30
> 20
10
1 III
./E,25) [
\ У
И \ \ \
4 6
t
10
20.
^ = {f-f,
40
> 20
10f-
если 0 < £ < 5,
если 5 < t < 10.
1 II 1
^ : УE;12.5)
4 6
10
^ *>-{£'- ^-25,
если 0 < t < 5,
если 5 < * < 10.
40
30г
> 20
10
EД2>5) /
i i |
О 2 4 6 8 10
t
6Ъ '
22. x(t) = { Ы - ^
если 0 < * < 3,
2^, если 3 < t < 7,
|(-5t2 + 100t - 290), если 7 < t < 10.
40
301
> 2ol
1 1 1 1
1
: Ar<21-5A
:уф;7.5) :
[■„■rtr^1^ 1 II 1
1
0 2 4 6 8 10
t
23. v(t) = —(9,8)£ + 49, так что шар достигает максимальной высоты (v = 0) через t — 5 секунд. Его
максимальная высота тогда равна уE) = 122,5 (м).
24. vE) = —160 футов в секунду.
25. Автомобиль останавливается, когда t ~ 2,78 (секунд), так что расстояние, пройденной до остановки,
приблизительно равно а?B,78) « 38,58 (м).
26. (а) у « 530 м (b) t « 20,41 с (c)t« 20,61 с
27. 2/о « 178,57 м 28. vD,77) « -192,64 футов в секунду
29. Через 10 секунд автомобиль проехал 200 футов и перемещался со скоростью 70 футов в секунду.
30. а = 22 фт/с2; тормозит в течение 4 секунд
31. vq = Юл/30 (м/с), приблизительно 197,18 км/час
32. 60 м
34. 460,8 футов
37. 25 (миль)
39. 6 миль в час
41. ^«181,33 фута в секунду
43. Время 6,12245 х 109 с « 194 года; Расстояние: 1,8367 х 1017 м « 19,4 светового года
44. Приблизительно 54 мили в час
33. 20\/Т0 » 63,25 (футов в секунду)
36. Приблизительно 13,6 футов
38. 1:10 пополудни
40. 2,4 мили
42. 25 миль
Раздел U
Ответы к избранным задачам
>, о
1002
Ответы к избранным задачам
7.
^ О
8.
10
11. Единственное решение существует в некото^й окрестности точки х = 1.
12. Единственное решение существует в некоторой окрестности точки х = 1.
13. Единственное решение существует в некоторой окрестности точки ж = 0.
14. Существование, но не единственность, гарантируется в некоторой окрестности точки х = 0.
15. Ни существование, ни единственность не гарантируются ни в какой окрестности точки х = 2.
16. Единственное решение существует в некоторой окрестности точки х = 2.
17. Единственное решение существует в некоторой окрестности точки х = 0.
18. Ни существование, ни единственность не гарантируются
19. Единственное решение существует в некоторой окрестности точки х — 0.
20. Единственное решение существует в некоторой окрестности точки х = 0.
21. Ваш рисунок должен показать, что у (—4) «3; точное решение дифференциального уравнения дает значение
у(-4) = 3 + е « 3,0183.
4 5
Ответы к избранным задачам 1003
22. у(-4)«-3
23. Ваш рисунок должен показать, что уB) « 1; фактическое значение ближе к 1,004.
* 0
24. уB)«1,5
25. Ваш рисунок должен показать, что предел скорости приблизительно равен 20 футам в секунду (весьма
высокая вероятность выживания) и что время, требуемое для достижения скорости 19 футов в секунду,
немного меньше, чем 2 секунды. Точное решение дает значение v(t) = 19 при t = | In 20 « 1,8723.
40
35
30
25
г
[
Г
L
L
Р
V
г
L
L
\
\
V
V
N
>«*
-~
**
У
//
ft
1
\
V
\
V
N
V.
—-
X*
'/.
/
• •
/
—Г"
Л
\
V
ч
>
-i-
У
■/■
/
Г
1
\
V
\
•\
N
V.
"*5«
"V"
/
./.
/
/-
/
\
Ч
\
Ч
N
"*ч
х"
X
./
/
/
/
\
\
\
\
ч
>.
*г
у
<
/
/
/
_jk_
\
N
\
V
Ч
>«*
дан
^
/
/.
/
/-
/
\
Л
\
N
Ч
>«*
—-
**
У
/.
/
•/•
/
V
\
V
ч
>
-S-
-<
•
■£
/
/•
/
\
V
\
•\
ч
>«*
—-
**
У
./.
/
/
/
—<—
\
X
V
■\
ч
>«*
—-
**
У
./.
/
. /
/
\
\
V
ч
>
-*-
-f
/
z'
/
/
/
_JL_
\
V
\
V
ч
>«*
—-
-"
/
/.
/
• •
/
—1—
\
Л
\
ч
ч
>«*
—-
**
У
У.
/
-/■
/
-<
1
ч
ч
■5
-
^
^
4
-,
15
10
5
26. Рисунок показывает, что после 60 месяцев будет приблизительно 40 оленей; более точное значение
приблизительно равно t & 61,61. Предельная численность популяции равна 75 оленям.
27. Задача Коши (задача с начальными условиями) у' = 2у/у, у@) = Ъ не имеет ни одного решения, если
Ь < 0; единственное решение, если Ь > 0; бесконечно много решений, если 6 = 0.
28. Задача Коши (задача с начальными условиями) ху' = у, у (а) = & имеет единственное решение, если
а ф 0; бесконечно много решений, если а — Ь — 0; ни одного решения, если а = 0, но Ь ф 0.
1004 Ответь^* избранным задана^
29. Задача Коши (задача с начальными условиями) у' = Зу2/3, у (а) = Ь всегда имеет бесконечно много
решений, определенных для всех х. Однако, если Ъ ф 0, то она имеет единственное решение в окрестности
х = а.
)}J
ш
/ /
(П.
30. Задача Коши (задача с начальными условиями) у' = — д/l — у2, у(а) = Ь имеет единственное решение,
если \Ь\ < 1; ни одного решения, если \Ь\ > 1, и бесконечно много решений (определенных для всех х)
если Ь = ±1.
31. Задача Коши (задача с начальными условиями) у' ^= \/l ^ у2, у (а) = Ь имеет единственное решение,
если \Ъ\ < 1; ни одного решения, если \Ь\ > 1, и бесконечно много решений (определенных для всех х\
если Ь = ±1.
Т"
32. Задача Коши (задача с начальными условиями) у' = Аху/у, у(а) = Ь имеет бесконечно много решений
(определенных для всех х), если b ^ 0; ни одного решения, если Ь < 0. Однако, если Ь > 0, то она имеет
единственное решение в окрестности х = а.
33. Задача Коши (задача с начальными условиями) ж2 у' + у2 =0, у (а) = Ь имеет единственное решение
с начальной точкой (а, Ъ), если а ф 0; ни одного решения, если а = 0, но Ь ф 0; бесконечно много
решений, если а = Ъ = 0.
6.
Ответы к избранным задачам 1005
Раздел 1.4
1. у(х) = Сехр(—х2)
3. у(х) = Сбхр(— cos ж)
5. у(х) = sin (С + у/х)
7. з/(х) = Bх4/3+СK/2
9. у(х) = СA + х)/A-х)
И. у(х) = (С - х2)/2
13. 1п(у4 + 1) = С + 4 sin ж
15. 1/(Зз/3) - 2/у = 1/х + In |х| + С
17. 1п|1 + 2/| = х+|х2 + С
19. у(х) = 2ехр(еж)
21.
»2 —
1 + у/х2 - 16
23. у(х) = §A + е2*-2)
25. у(х) = х ехр(х2 — 1)
27. у = 1пCе2* - 2)
29. (а) Общее решение у(х) = — 1/(х — С); (Ь) особое решение у(х) = 0. (с) Из рисунка мы видим, что
через каждую точку плоскости ху проходит единственное решение.
2. у(х) = 1/(х2 + С)
4. з/(х) = СA+хL
6. 2/(х) = (х3/2+СJ
8. у(х) = sin_1(x2 + C)
10. у(х) = A + х)/[1 + СA + х)]
12. у2 + 1 = Се*2
14. Зу + 2у3/2 = Зх + 2*3/2 + С
16. у(х) = sec-^CVl + x2)
18. у(х) = tg (с - i - х J
20. у(х) = tg(x3 + тг/4)
22. у(х) = —Зехр(х4 — х)
24. у(х) = ^ sin х
26. у(х) = 1/A - х2 - х3)
28. у(х) = arctg(-v/x — 1)
30. Общее решение у(х) = (х — СJ; особое решение у(х) = 0. (а) Ни одного решения, если Ь < 0.
(Ь) Бесконечно много решений (для всех х), если 6^0. (с) Два решения в окрестности (а, 6), если Ь < 0.
31. Разделение переменных дает то же самое общее решение у — (х — СJ, что и в задаче 30, но из условия
у' = 2у/у ^ (кшедует, что только правые половины парабол можно рассматривать в качестве интегральных
кривых. На рисунке ниже мы видим, что через точку (а, Ь): (а) не проходит ни одной интегральной кривой,
если РЬ < 0; (Ь) проходит единственная интегральная кривая, если Ь > 0; (с) проходит бесконечно много
интегральных кривых, если 6 = 0.
fO06
f Ответа доизбраниям? задачам
75
50
25
О
II' / ■ ■ / 1
•/ -7 / '
7 / 7 i !
7 /•/ / /
/77.//,
7 / -А 7 /' ,
1 J t 1 ,f
1 I \
/ / / /./
i /7 / /
у//у А
-15 -10
10 15
32. Общее решение у(х) = ±вес(ж — С); особые решения у(х) = ±1. (а) Ни одного решения, если ]Ъ\ < 1;
(Ь) единственное решение, если |Ь| > 1; (с) бесконечно много решений, если b = il.
33. Приблизительно 51840 человек 34. £ « 3,87 часа
35. Приблизительно 14735 лет 36. Возраст приблизительно 686 лёт
37. $21103,48 38. $44,52
39. 2585 мг 40. Приблизительно 35 лет
41. Приблизительно 4,86 х 109 лет назад 42. Приблизительно 1,25 миллиарда лет
43. Приблизительно через 63 минуты 44. Приблизительно 2,41 минуты
45. (а) 0,495 м; (Ь) (8,32 х НГ7)/0; (с) 3,29 м
46. (а) Приблизительно 9,60 дюйма; (Ь) Приблизительно 18200 футов
47. Приблизительно через 46 дней 48. Приблизительно 6 миллиардов лет
49. Приблизительно через 66 минут 40 секунд
50. (a) A(t) = 10 • З2*/15; (Ь) приблизительно 2Q,80 pu (единиц загрязнения) (с) Приблизительно 15,72 года
51. (a) A(t) = 15 • (|)*/5; (Ь) приблизительно 7^4 su; (с) Приблизительно после 33,4 месяца
52. Приблизительно 120 тысяч лет назад 53. Приблизительно 74 тысячи лет назад
54. 3 часа 55. 972 секунд
56. В момент времени £ = 2048/1562 «1,31 (в часах)
58. В 13:20 _
59. (a) y(t) = (8 - 7£J/3; (Ь) В 13:03:34; (с) г = ^ yj^ « 0,15 (дюйма)
60. Приблизительно 6 минут 3 секунды 61. Приблизительно 14 минут 29 секунд
62. Резервуар будет пуст приблизительно через 14 секунд после 14:00
63. (а) 13:53:34; (Ь) г « 0,04442 фуга « 0,53
65. Приблизительно в 10:29
Раздел 1.5
1. у(х) = 2A - е-*)
3. у(х) = е-3х(х2+С)
5. у(х) — х + 4х-2
64. г = =56 >/3 фута, приблизительно i дюйма
у(х) = 5х1/2+Сх~1/2
у(х) = жG + 1пж)
у(х) = 0
у(х) = (е* + е~*)/2
2/(х) = [1-5ехр(-ж2)]/2
у(х) — A + sinx)/(l + х)
у(х) = \ sin х + С esc х
7.
9.
11.
13.
15.
17.
19.
21. у(х) = х3 sin х
23. 2/0г) = х3B + Се-2*)
25. у(х) = [ехр (-§я2)] [3(я2 + IK/2
•2]
2. у{х)
4. у(^;
6. у(х;
8. у(х]
10. у(ж]
12. у(х]
14. 2/(х]
16. у(х]
18. у(х]
20. у(»;
22. у(х]
24. у (х]
26. х(у]
) = (Зх + С)е2ж
) = (ж + С)е*2
) = х2 + 32/х5
) = Зх + Сх~1/3
) = Зх3 + Сх3/2
) - 1х5 + 56ж <
) = х3 In х + Юх3
1 = 1 + е~ *****
) = :c2(sinx + C)
).= -1 4-ехр(-я;1- |ж2)
) = (х3 + 5N-^
)=ь|[1 + 16(х2+4)^3/2]
) = 1/2у2+С/2/4
Ответы к избранным задачам 1007
27. х(у)=е*(С+§у2) 28. х(у) = §[у + A + y2)(arctgy + С)]
29. у(х) = [ехр(х2)] [С + §V5rerf(«)] 30. у(х)■= х1/2 J** t/2 costdt
32. (a) y(x) = sinx — cosx; (b) y(x) = Ce~x + sinx — cosx; (c) y(x) = 2e~x + sinx — cosx
33. Приблизительно после 7 минут 41 секунды 34. Приблизительно 22,2 дня
35. Приблизительно 5,5452 года
36. (a) x(t) = F0 - t) - F0 - tK/3600; (b) приблизительно 23,09 фунта
37. 393,75 фунта
38. (a) x(t) = бОе"*/20; (b) y(t) = 150е-*/40 - lOOe"*/20; 56,25 фунта
39. (b) j/max = lOOe « 36,79 (гал) 41. (b) Приблизительно $1 308 283
43. -50,0529, -28,0265, -6,0000, 16,0265, 38,0529 44. 3,99982, 4,00005, 4,00027, 4,00050, 4,00073
45. x(t) = 20A - е~*/10); х = 10 после t — 10 In 2 » 6,93 месяца.
46. x(t) = ^A01 - 102е-*/10 -f cost -f 10sint); x = 10 через t = 6,47 месяца.
Раздел 1.6
1. x2 - 2xy - у2 = С
3. y(x) = x(C + ln|x|J
5. ln|xy| = C + xy
7. y3 = 3x3 (C + Ь |*|)
9. y(x) = x/(C-ln|x|)
11. y = C(x2+y2)
J3. 2/+л/^2+2/2 = ^2
15. x2Bxy + y2) = C
17. y(x) = -4x + 2tgBx + C)
19. y2=x/B + Cx5)
21. y2 = l/(Ce~2a; - 1)
23. y(x) = (x -f Cx2)
25. 2x3y3 = 3i/TTF + С
27. y(x) = (x4+CxI/3
29. sin2 у =* 4x2 + Cx
31. x2 + Зху + у2 = С
33. x3 + 2xy2 + 2y3 = С
35. 3x4 + 4y3 + 12ylnx = C
37. sinx + xlny + ey = С
39. 5x3y3 + 5xy4 + у5 = С
41. x2!/-1 + y2x~3 + 2yV2 = С
43. y(x) = Ax2 + В
45. y(x) = A cos 2x + В sin 2x
47. y(x) = A - In |x + B|
49. y(x) = ±(A + Bea;I/2
51. x(y) = -±(y3 + Ay + B)
53. y(x) = Atg(Ax + B)
58. у = exp(x2 + C/x2)
60. (x + 3y + 3M = C(y-x-5)
64. y(x) = x + e-*2 [C + | v^erf(x)]_1
69. Приблизительно 3,68 мили
Обзорные задачи к главе 1
1. Линейное: у(х) = х3(С + 1пх)
2. С разделяющимися переменными: у(х) = х/C — Сх — х In x)
3. Однородное: у(х) = х/(С — 1пх)
4. В точных дифференциалах: х2у3 + ех — cos у = С
2. у2=х2Aпх + С)
4. 2arctg(y/x) - ln(y2/x2 + 1) *= 21пх + С
6. 2у In у = х + Су
8. у = —xln(C — 1пх)
10. х2 + 2у2 = Сх6
12. 4х2+у2=х2Aпх + СJ
14. х - s/x2 + у2 = С
16. х = 2V* + у + 1 - 21п A + ^х + у + 1) + С
18. у=1п(х + у + 1) + С
20. у3 = 3 + Се-3*2
22. у3 = 7х/GСх7 + 15)
24. y2=e2*/(C + lnx)
26. у3 = е-*(х + С)
28. у = 1п(Сх2 + х2е2*)
30. х2 - 2хеУ -е2У = С
32. х2 - ху + Зу2 = С
34. *8 + *V+H = tf
36. х + е*» + у2 = С
38. х2 + 2хarctgу + 1пA + у2) = С
40. ех sin у + х tg у = 'С
42. ху/3 + х/2у = С
44. х(у) = Ау2 + В
46. у(х) = х2 + Alnx + В
48. у(х) = 1пх + Ах-2 + В
50. у(х) = In | sec(x + A)| - |х2 + В
52. Ау2 - (Ах + ВJ = 1
54. Ау2(В-х) = 1
59. х2 - 2ху - у2 - 2х - 6у = С
61. х = tg(x — у) + sec(x — у) + С
65. у(х) =х + (С-х)-1
1008 Ответы к избранным задачам
5.
6.
7.
8.
9.
10.
11.
13.
14.
16.
17.
19.
20.
22.
24.
25.
26.
27.
29.
30.
31.
33.
35.
С разделяющимися переменными: у(х) ~ Сехр(х~
2)
С разделяющимися переменными: у(х) = х/A + Сх + 2х In x)
Линейное: у{х) = х~2(С + 1пх)
Однородное: у(х) = ЗСх/(С - х3) = Зх/A + Кх3)
Бернулли: у(х) = (х2 4 Сх~1J
С разделяющимися переменными: у(х) = tg (С 4- х 4- |х3)
Однородное: у(х) = х/(С — 31пх) 12. В точных дифференциалах: Зх2у3 4- 2ху4 ■
С разделяющимися переменными: у(х) = 1/(С 4 2х2 — х5)
Однородное: у2 = х2/(С 4- 2 In ж)
15. Линейное: з/(х) = (ж3 4- С)е~3х
Подстановка: v = у — х; решение: у — х — 1 = Се2х(у — х 4-1)
В точных дифференциалах: ех 4- еу 4- ежу = С 18. Однородное: j/2 = Cx2(x2 — у2)
С разделяющимися переменными: у(х) = х2/(х5 4- Сх2 4 1)
Линейное: у(х) = 2х-3/2 4 Сх~3 21. Линейное: у(х) = [С 4- 1п(х - 1)]/(х + 1)
Бернулли: у(х) = Bх4 4- Сх2K 23. В точных дифференциалах: хеу 4- ysinx = С
С разделяющимися переменными: у(х) = х*/2/Fх2 4- Сх1!2 4- 2)
Линейное: у(х) = (х 4- 1)~2(х3 + Зх2 + Зх + С) = х + 1 + К(х + 1)~2
В точных дифференциалах: Зх3/2у4/3 — 5х6/5у3/2 = С
Бернулли: у(х) = ж" (С + 1пх)-1/3 28. Линейное: у(х) = х_1(С 4 е2ж)
Линейное: у(х) = (х2 + ж + С)Bх + 1)~1/2
Подстановка: v = х + у; решение: х = 2(х 4 уI^2 — 21п[1 + (х 4 уI/2] + С
С разделяющимися переменными и линейное 32. С разделяющимися переменными и Бернулли
В точных дифференциалах и однородное 34. В точных дифференциалах и однородное
С разделяющимися переменными и линейное 36. С разделяющимися переменными и Бернулли
2. x(t) =
* 5
3. X{t) :
2 + e"
-it
2 - e-2*
4
3
2
x 1
0
-1
-2
Ответы к избранным задачам 1009
4.l(t)=3(l-e:-)
1 2
5. x(t) =
6. x(t) =
7. s(t) =
к 5
8. x(t) =
221
к 10
0.02
9. 484
11. (b) P(t) = (|t +10J
10. 20 недель
12. P(t)
240
20 -t
1tI0 Ответы »шзбраншм задачам
180
14. P(t)^
Ро
1 + fcPpt
17. Приблизительно 44,22 месяца
20. Приблизительно 42,12 месяца
22. Приблизительно 34,66 дня
13. P(t) =
30-t
16. Приблизительно 27,69 месяца
19. Приблизительно 24,41 месяца
200
21. т-т- « 153,7 миллиона
1 + е-6/5
23. (a) lim x(t) = 200 граммов (b) § In 3 « 1,37 секунды
24. Приблизительно 9,24 дня 25. (а) М = 100 и fc = 0,0002; (b) В 2035 году
26. 50 In | « 5,89 месяца
27. (а) 100 In | « 58,78 месяца; (Ь) 100 In 2 « 69,31 месяца
28. (а) Аллигаторы в конечном счете вымрут. (Ь) Судный День происходит приблизительно через 9 лет
2 месяца.
29. (а) РA40) « 127,008 миллиона; (Ь) Приблизительно 210,544 миллиона; (с) В 2000 году мы получаем
Р « 196,169, тогда как фактическая численность населения в 2000 году была равна приблизительно
281,422 миллиона.
31. а « 0,3915; 2,15 х 106 клеток 37. к и 0,0000668717, М « 338,027
38. к » 0,000146679, М« 208,250
39. P(t) = Ро ехр ( kt H sin 2irt); волнистая кривая на рисунке ниже изображает график при Ро = 100,
V 2тг /
к = 0,03 и b = 0,06. Она колеблется около другой изображенной там кривой, которая представляет
естественный рост при Ро = 1Q0 и k = 0,03. Мы видим, что эти две кривые пересекаются в конце
каждого полного года. ,
Р
120г
2 3 4 5
Раздел 2.2
1. Неустойчивая точка равновесия: х = 4;
x(t) =й 4 + (*о - 4)е*
8f
к 4
2. Устойчивая точка равновесия: х = 3;
я(*) = 3 + (хо - 3)еГ*
6г
к 3
Т и г-
\ \
\
X Ч \
/"
/
,/
■ '
0 12 3 4
t
Of вшы к/избраншгм задачём 1011
3. Устойчивая точка равновесия: х = 0;
неустойчивая точка равновесия: х = 4;
x(i)
4хо,
xq + D - xo)e4t
8
4
; о
-4
1 г-; л
\
... ,. ,
7 / /
I 1 ! 1 L_J
-i—i j
/
/
i
i
)
? 1
0 12 3 4 5
4. Устойчивая точка равновесия: х = 3;
неустойчивая точка равновесия: х = 0;
3#о
*(*) =
х0 + C - x0)e~3t
5. Устойчивая точка равновесия: х = —2;
неустойчивая точка равновесия: х — 2;
х(
2
к 0
9
2[х0 + 2 + (х0 - 2)е4']
j х0 + 2 - (х0 - 2)е4*
/ ,/ ; у
\ \ \ ч-
\
\ \ \ \
i 1 ; (
1 -1 •— J-i •— Л 1 lI » J
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
t
6. Устойчивая точка равновесия: х = 3;
неустойчивая точка равновесия: х — — 3;
x(t) =
3[х0 - 3 + (а?р + 3)e6t]
3 - х0 + (х0 + 3)е6'
/ /
j i_i_
0 12 3 4 5
t
1012 Ответы к избранным задачам
7. Полуустойчивая (см. задачу 18) точка
равновесия: х = 2;
*(*) =
B* - 1)х0 - At
too - 2t - 1
4
* 2
0
1 ■ 1 г—i г—i г-
! ! i I
: ! 1 1
/ / / / "
^^г^1 •■•^^-■■•■■■■'••■■•■•'•■"■'" """"
/
/ /
/ ! !'
Li- 1 L -J i 1
0 1
2 3 4 5
t
8. Полуустойчивая точка равновесия: х = 3;
Ct + l)xQ - 9t
x(t) =
tx0 - 3t + 1
x 3
9. Устойчивая точка равновесия: х = 1;
неустойчивая точка равновесия: х = 4;
*(*) =
4A - а?р) + (хр - 4)е3
1 — xq + (#о "~ 4)е3*
-2
\ \ "ч- I
0 1
2 3 4 5
t
10. Устойчивая точка равновесия: х = 5;
неустойчивая точка равновесия: х = 2;
*(*) =
-1
2E - а?0) + 5(жр - 2)е3
5 - жо + (х0 - 2)e3t
ь^****»»^^^
0 1
2 3 4 5
t
Ответы к избранным задачам 1013
11. Неустойчивая точка равновесия: х = 1;
1 1
(*(*) - IJ (а* - IJ
■2t
12. Устойчивая точка равновесия: х = 2;
1 _ 1
B-s(t)J " B-хоJ
ч
2
0
-2
п т~
/ /
У /
iSSSssss—S—
^^^^^.
\ \
1—; г-
/ /
..^__. .,--"\__
7:---1Г
i '* i
.-'■"""'"'
0 12 3 4 5
t
2t
н 2
В каждой из задач 13-18 мы приводим чертеж поля направлений и типичных интегральных кривых.
Стационарные решения данного дифференциального уравнения помечены, причем устойчивость или неустойчивость
каждого из них должна быть видна из рисунка.
.13.
х' = (х + 2)(х-2J
15.
jc'=(jc2-4J
14.
•г-L
16.
1014 Ответы к избранным задачам
19. Есть две точки равновесия при h < 2|, одна точка равновесия при h =* 2|, но точек равновесия нет при
h > 2|. Диаграмма бифуркации представляет собой параболу (с — 5J = 25 — Ю/i в плоскости he.
20. Есть две точки равновесия при а < ^, одна точка равновесия при s = ^, но точек равновесия нет при
5 > jg. Диаграмма бифуркации представляет собой параболу Bс — 5J = 25A — 16$) на плоскости so.
Раздел 2.3
1. Приблизительно 31,5 секунды 3. 400/(In 2) » 577 футов
5. 400 In 7 «778 футов
7. (а) 100 футов в секунду; (Ь) приблизительно 23 секунды и 1403 фута, чтобы достигнуть 90 футов в секунду
8. (а) 100 футов в секунду; (Ь) приблизительно 14,7 секунд и 830 футов, чтобы достичь 90 футов в секунду
9. 50 футов в секунду , 10. Приблизительно 5 минут 47 секунд
11. Время падения: приблизительно 12,5 секунды 12. Приблизительно 648 футов
19. Приблизительно 30,46 фута в секунду; точно 40 футов в секунду
20. Приблизительно 277,26 ft
22. Приблизительно 20,67 фута в секунду; приблизительно 484,57 секунды
23. Приблизительно 259,304 секунды
24. (а) Приблизительно 0,88 сантиметра; (Ь) приблизительно 2,91 км
25. (Ь) Приблизительно 1,389 км в секунду; (с) Гщах = 100-R/19» 5,26R
26. Да
28. (Ь) После приблизительно 8,5 минуты столкнется с поверхностью приблизительно со скоростью 4,116 км/с.
29. Приблизительно 51,427 км
30. Приблизительно 11,11 км/с (а вторая космическая скорость на поверхности земли равна приблизительно
11,18 км/с).
Раздел 2.4
В задачах 1-10 мы округляем указанные значения к трем десятичным знакам.
1. Приближенные значения 1,125 и 1,181; истинное значение 1,213
2. Приближенные значения 1,125 и 1,244; истинное значение 1,359
3. Приближенные значения 2,125 и 2,221; истинное значение 2,297
4. Приближенные значения 0,625 и 0,681; истинное значение 0;713
5. Приближенные значения 0,938 и 0,889; истинное значение 0,851
6. Приближенные значения 1,750 и 1,627; истинное значение 1,558
7. Приближенные значения 2,859 и 2,737; истинное значение 2,647
8. Приближенные значения 0,445 и 0,420; истинное значение 0,405
9. Приближенные значения 1,267 и 1,278; истинное значение 1,287
10. Приближенные значения 1,125 и 1,231; истинное значение 1,333
Ответы к избранным задачам 1015
В задачах 11-24 нужно составаить таблицы значений, которые занимают слишком много места; мы не можем
привести их здесь. В задачах 1 Мб мы даем сначала конечное значение ж, а затем соответствующие
приблизительные значения у, полученные при величине шага h = 0,01 и h == 0,005, и, наконец, затем конечное истинное
значение у. (Все значения у округлены с точностью до четырех десятичных знаков.)
11. 1,0, -0,7048, -0,7115, -0,7183
13. 2,0, 4,8890, 4,8940, 4,8990
15. 3,0, 3,4422, 3,4433, 3,4444
12. 1,0, 2,9864, 2,9931, 3,0000
14. 2,0, 3,2031, 3,2304, 3,2589
16. 3,0, 8,8440, 8,8445, 8,8451
В задачах 17-24 мы даем сначала конечное значение ж, а затем соответствующие приближенные значения у,
полученные при величине шага h = 0,1, h = 0,02, h = 0,004 и h = 0,0008 соответственно. (Все значения у
округлены с точностью до четырех десятичных знаков.)
17. 1,0, 0,2925, 0,3379, 0,3477, 0,3497
19. 2,0, 6,1831, 6,3653, 6,40% 6,4096
21. 2,0, 2,8508, 2,8681, 2,8716, 2,8723
23, .1,0, 1,2262, 1,2300, 1,2306, 1,2307
18. 2,0, 1,6680, 1,6771, 1,6790, 1,6794
20. 2,0, -1,3792, -1,2843, -1,2649, -1,2610
22. 2,0, 6,9879, 7,2601, 7,3154, 7,3264
24. 1,0, 0,9585, 0,9918, 0,9984, 0,9997
25. При величине шага h =0,01 и h = 0?0Q5 приблизительная скорость лосле 1 секунды равна 16,0 футов
в секунду (86% предельной скорости 20 футов в секунду); после 2 секунд она равна 19,2 фута в секунду
' (%% предельной Ькорости). ;
При величине шага h — 1 и h = 0,5 приближенная численность популяции через 5 лет равна 49 оленей
F5% граничной численности популяции 75 оленей); через 10 лет она равна 66 оленей (88% граничной
численности популяции).
Последовательно с величиной шага h = ОД\ 0,01,0,001,... первые четыре аппроксимации к уB)
получаются равными 0,7772, 0,9777, 1,0017 и 1,0042. Поэтому кажется вероятным, что у{2) « 1,00.
28, Последовательно с величиной шага Л = 0,1,0,01,0,001,... первые четыре аппроксимации к уB)
получаются равными 1,2900, 1,4435, 1,4613 и 1,4631. Поэтому кажется вероятным, что уB) « 1,46.
29. ____
26
27,
№*•
'V Г?'?/''
: 0,006
-1,0
-0,7
-0,4
-0,1
0,2
0,5
1,0000
1,0472
1,1313
1,2826
0,8900
0,7460
1,0000
1,0512
1,1358
1,3612
1,4711
1>2808
1,0000
1,0521
1,1390
1,3835
0,8210
0,7192
30.
V -г'
1,8
1,9
2,0
2,8200
3,9393
5,8521
4,3308
7,9425
28,3926
31.
#rj
>..£:«&'ДОЗ.
':-.•''■'■'V.,
0,7
0,8
0,9
4,3460
5,8670
8,3349
6,4643
11,8425
39,5010
1016 Ответы к избранным задачам
Раздел 2.5
1.
По усовершенствованному методу Эйлера Фактические
а? Enters? *• . у
0,1 1,8100 1,8097
0,2 1,6381 1,6375
0,3 1,4824 1,4816
0,4 1,3416 1,3406
0,5 1,2142 ' 1,2131
Обратите внимание. В задачах 2—10 мы даем значение ж, соответствующее значению у, вычисленное по
усовершенствованному методу Эйлера, и истинное значение у.
2. 0,5, 1,3514, 1,3191 3. 0,5, 2,2949, 2,2974
4. 0,5, 0,7142, 0,7131 5. 0,5, 0,8526, 0,8513
6. 0,5, 1,5575, 1,5576 7. 0,5, 2,6405, 2,6475
8. 0,5, 0,4053, 0,4055 9. 0,5, 1,2873, 1,2874
10. 0,5, 1,3309, 1,3333
В задачах 11-16 мы даем конечное значение ж, соответствующие значению у при h = 0,01 и при h = 0,005,
и истинное значение у.
11. 1,0, -0,71824, -0,71827, -0,71828 12. 1,0, 2,99995, 2,99999, 3,00000
13. 2,0, 4,89901, 4,89899, 4,89898 14. 2,0, 3,25847, 3,25878, 3,25889
15. 3,0, 3,44445, 3,44445, 3,44444 16. 3,0, 8,84511, 8,84509, 8,84509
В задачах 17-24 мы даем конечное значение х и соответствующие значения у для Л = 0,1, 0,02, 0,004 и 0,0008.
17. 1,Q, 0,35183, 0,35030, 0,35023, 0,35023 18. 2,0, 1,68043, 1,67949, 1,67946, 1,67946
19. 2,0, 6,40834, 6,41134, 6,41147, 6,41147 20. 2,0, -1,26092, -1,26003, -1,25999, -1,25999
21. 2,0, 2,87204, 2,87245, 2,87247, 2,87247 22. 2,0, 7,31578, 7,32841, 7,32916, 7,32920
23. 1,0, 1,22967, 1,23069, 1,23073, 1,23073 24. 1,0, 1,00006, 1,00000, 1,00000, 1,00000
25. При величине шага h = 0,01 и h = 0,005 скорость через 1 секунду равна приблизительно 15,962 фута
в секунду (80% предельной скорости 20 футов в секунду); после 2 секунд она равна 19,185 футов в секунду
(96% предельной скорости).
26. При величине шага Л=1иЛ = 0,5 численность популяции через 5 лет приблизительно равна 49,391
оленя F5% граничной численности популяции 75 оленей); после 10 секунд она равна 66,113 оленей (88%
граничной численности популяции).
27. Последовательно полагая величину шага Л = 0,1,0,01,0,001,... мы получаем первые три аппроксимации
к уB): 1,0109, 1,0045 и 1,0045. Поэтому кажется вероятным, что уB) « 1,0045.
28. Последовательно полагая величину шага h = 0,1,0,01,0,001,... мы получаем первые четыре
аппроксимации к уB): 1,4662, 1,4634, 1,4633 и 1,4633. Поэтому кажется вероятным, что уB) « 1,4633.
29. Скорость при ударе приблизительно равна 43,22 м/с
30. Скорость при ударе приблизительно равна 43,48 м/с
Раздел 2.6
1. 2/@,25) « 1,55762; 2/@,25) = 1,55760. у@,5) « 1,21309; г/@,5) = 1,21306. Решение: у = 2е~х
В задачах 2-10 мы даем аппроксимацию 2/@,5), его истинное значение и решение.
2. 1,35867, 1,35914; у = \е2х 3. 2,29740, 2,29744; у = 2ех - 1
4. 0,71309, 0,71306; у = 2е~х + х - 1 5. 0,85130, 0,85128; у = -ех + х + 2
6. 1,55759, 1,55760; w = 2exp(-x2) 7. 2,64745, 2,64749; у = 3ещ>(-х3)
Ответы к избранным задачам 1017
8. 0,40547, 0,40547; у = 1п(х + 1)
10. 1,33337, 1,33333; у = A ■
11. Решение: у(х) ~2 — еж.
х2)-
9. 1,28743, 1,28743; j/= tg ± (я + тг)
& - -
0,0
0,2
0,4
0,6
0,8
1,0
h ж 0,2
'л-^"*ул-
1,00000
0,77860
0,50818
0,17789
-0,22552
-0,71825
h ss 0Д
у
1,00000
0,77860
0,50818
0,17788
-0,22554
-0,71828
Точное
У
1,00000
0,77860
0,50818
0,17788
-0,22554
-0,71828
В задачах 12-16 мы даем конечное значение ж, соответствующие аппроксимации Рунге-Кутта при h — 0,2
и при Л = 0,1, точное значение у и решение.
12. 1,0, 2,99996, 3,00000, 3,00000;
у = 1 + 2/B - х)
14. 2,0, 3,25795, 3,25882, 3,25889:
у =1/A-In»)
16. 3,0, 8,84515, 8,84509, 8,84509:
у = (ж6 - 37) V3
13. 2,0, 489900, 4,89898, 4,89898;
у= VS + x4
15. 3,0, 3,44445, 3,44444, 3,44444;
у = х + 4х~2
В задачах 17-24 мы даем конечное значение х и соответствующие значения у при h = 0,2, 0,1, 0,05 и 0,025.
18. 2,0, 1,679513, 1,679461, 1,679459, 1,679459
17,
19,
20,
21,
1,0, 0,350258, 0,350234, 0,350232, 0,350232
2,0, 6,411464, 6,411474, 6,411474, 6,411474
2,0, -1,259990, -1,259992, -1,259993, -1,259993
2,0, 2,872467, 2,872468, 2,872468, 2,872468 22. 2,0, 7,326761, 7,328452, 7,328971, 7,329134
23. 1,0, 1,230735, 1,230731, 1,230731, 1,230731 24. 1,0, 1,000000, 1,000000, 1,000000, 1,000000
25. При величине шага h = 0,1 и h = 0,05 скорость через 1 секунду приблизительно равна 15,962 фута
в секунду (80% предельной скорости 20 футов в секунду); после 2 секунд она равна 19,185 фута в секунду
(96% предельной скорости). ,
26. При величине шага h = 6 и Л = 3 численность популяции через 5 лет приблизительно равна 49,3915 оленей
F5% граничной численности популяции 75 оленей); через 10 лет она равна 66,1136 оленей (88% граничное
численности популяции).
27. Последовательно полагая величину шага /i =1,0,1,0,01,... мы получаем первые четыре аппроксимации
к 2/B): 1,05722, 1,00447, 1,00445 и 1,00445. Таким образом, кажется вполне вероятным, что уB)«1,00445
с точностью до пяти десятичных знаков.
28. Последовательно полагая величину шага h = 1,0,1,0,01,... мы получаем первые четыре аппроксимации
к уB): 1,48990, 1,46332, 1,46331 и 1,46331. Таким образом, кажется вполне вероятным, что уB) fa 1,4633
с точностью до пяти десятичных знаков.
29. Время движения вверх: приблизительно 9,41 секунды
30. Время движения вверх: приблизительно 9,4Гсекунды
2. у(х) = 2е3х - Зе~3х
4. у(х) — 10 cos Ъх — 2 sin 5ж
6. у(х) = 4е2ж + Зе-Зж
8. 2/(х) = |A4-2е3*)
10. у(х) = Зе5х - 2хе5х
Глава 3
Раздел 3.1
1. у(х) = %ех -
2е
3. у(х) = 3 cos 2х + 4 sin 2x
5. у(х) = 2ех - е2х
7. у(х) = 6 - 8е~х
9. у(х) = 2е~х + хе~х
1018 Ответы^ избранным задачам
11. у(х) = Ъех sin ж 12. у(х) = e~3a:Bcos2x -jt- 3sin2x)
13. у(ж) = 5ж - 2х2 14. у{х) = Зх2 - ,16/ж3
15. у(ж) = 7х — Ъх In х 16. у(х) = 2 cos(ln х) 4- 3 sin(ln x)
21. Линейно независимы 22. Линейно независимы
23. Линейно независимы 24. Линейно зависимы
25. Линейно независимы 26. Линейно независимы
28. у{х) = 1 — 2 cos х — sin ж,
29. Нет никакого противоречия, потому что если данное дифференциальное уравнение разделить на ж2, чтобы
получить его представление в виде (8), то полученные коэффициентные функции р(х) = —4/ж и q{x) =
= 6/х2 не будут непрерывны в точке х = 0.
33. у(ж) = с\ех 4- с2е2х 34. у(ж) = с\е~Ъх 4- с2е3х
35. у(х) = сг+ с2е~5х 36. у(ж) = ci 4- с2е~3х12
37. у(ж) = cie-^/2 + с2еж 38. у(ж) = cie"*/2 + с2е~3х12
39. у (ж) = (ci 4- с2х)е~х/2 40. у (ж) = (а + с2ж)е2*/3
41. у(ж) = cie*/3 4- с2е5*/2 42. у(ж) = С1е~4х/7 + с2е3*/5
43. у" 4- Юу' = 0 44. у" - 100у = 0
45. у" + 20у' + ЮОу = 0 46. у" - 110у' + ЮООу = 0
47. у" = 0 48. у" - 2у' - у =* 0
49. Вершина: (lnj, ^). 50. (-In2,-2)
52. у(ж) = cix + с2/х 53. у(ж) = с\х~4 4- с2ж3
54. у(ж) = cix-3/2 4- с2хх12 55. у (ж) = ci 4- c2 In ж
56. у (ж) = x2(ci 4- С2 In ж)
Раздел 3.2
1. 15 • Bж) - 16 • (Зж2) - 6 • Eж - 8ж2) =0 2. (-4)E) + E)B - Зж2) + A)(Ю + 15ж2) = 0
3. 1 • 0 + 0 • sin ж + 0 • ех = 0 4. F)A7) 4- (-51)B sin2 ж) + (-34)(#cos2 ж)'Ы'0*
5. 1 • 17 - 34 • cos2 ж +.17 • сов2ж = 0 6. (-1)(еж) 4- (l)(coehs) 4- (l)(sinhx) е= 0
13. у(ж) = \ех - \е'2х 14. у(ж) = \{Ъех - бе2* + Зе3*),
15. у(х) = B - 2ж + х2)ех . 16» у (ж) =-12еж + 13е2ж - 10же2ж
17. у (ж) = | B9 - 2 cos Зж - 3 sin Зж) 18. у (ж) = ех B - cos ж - sin ж)
19. у(ж) = ж + 2ж2 + Зж3 20. у(ж) = 2ж - ж-2 + ж-2 In ж
21. у (ж) = 2 cos ж - 5 sin ж 4- Зж 22. у (ж) = 4е2ж - е~2х ■*- 3
23. у(ж) = е~х + 4е3х - 2 24. у (ж) = ех C cos ж + 4 sin ж) + ж -f 1
38. у2(ж) = ^ 39. у2(ж) = же*/2
ж*3
40. у2(х) = жеж 41. у2(х) = ж 4- 2
42. у2(х) = 1 + ж2
Раздел 3.3
1. у(ж) = cie2x + с2е~2х 2. у(ж) = с\ 4- с2е3ж/2
3. у(ж) = cie2x 4- с2е~5х 4. у(ж) = с\ех12 4- с2е3х
5. у(ж) = cie~3x 4- с2же~3ж
6. у(ж) = е~Ъх12 [ci ехр (|жл/б) 4- с2 ехр (-^л/б)]
7. у(ж) = cie3x/2 4- с2хе3х12 8. у (л) = e3x(ci cos 2ж 4- с2 sin 2ж)
9. у(ж) = e~4x(ci совЗж 4- с2 этЗж) 10. у(ж) = с\ 4- с2ж 4- сзж2 4- с±е.~3х?ъ
11. у(ж) = с\ 4- с2ж 4- сзе4ж 4- С4же4ж 12. у(ж) = с\ 4- с2еж 4- сзжеж 4- С4Ж2еж
13. у(ж) = с\ 4- с2е~2х13 4- сзже~2ж/3 14. у(ж) = ciex 4- с2е-ж 4- сз cos 2ж 4- С4 зт2ж
15. у(ж) = cie2x + с2хе2х + сзе-2ж 4- С4же~2ж 16. у (ж) = (с± 4- с2ж) cos Зж + (сз 4- С4Ж) sin Зж
17. у (ж) = a cos (ж/л/2) + с2 sin (x/V^) + с3 cos ^2ж/\/3 ) 4- с4 sin hx/y/S )
18. у(ж) = cie2x 4- c2e_2ar 4- сз сов2ж 4- С4 sin2x 19. у(ж) = cie^ 4- с2е~х 4- сзже"
20. у(ж) = е"*/2 [(ci + с2ж) cos (|ж\/з) 4- (сз + с3ж) sin (|«>/з)]
21. у(х) = Ъех + 2е3х
0—х
QiTpetw к избранным задачам
1019
22. у(х) = е~х1ъ [Зсов (x/V5) + 5V3sin (ж/vS)]
23. у{х) = e3xCcos4ar - 2sin4x) 24. у(ж) = §(-7 4- е2ж + 8е~ж/2)
25. у(ж) = ±(-13 4- 6ж 4- Эе-2^/3) Ч 26. у(ж) = £B4 - Эе* - 25хея:)
27. у(х) = ciex 4- С2е_2ж + с^же~2ж 28. $/(ж) = с\е2х 4- С2е-Ж + сзе~~ж/2
29. у(ж) = С1еж 4- е3*/2 [с2сшГ §W5) +сзбШ (f sV5)]
30. у (ж) = cie_aj 4- С2в2аг 4- сз соз(ж\/3) + С4 sin(x\/3)
31. у (ж) = с\ех 4- e"^2a!(c2 cos 2ж 4- сз зт2ж) 32. у(х) — с\е2х 4- (сг 4- сзж 4- С4Ж2)е~ж
33. у(х) = cie3x + е"'3ж(с2 cos Зж 4- сз sin Зж) 34. у(х) = с\е2х^ + сг cos 2х + сз sin 2x
35. у(х) = с%е~х/2 4- С2е~х/3 4- сз cos 2ж 4- С4 вщ2ж
36. у(ж) =cie7*/9 + e-x(c2cosa; + C3sina;) 37. у(х) = 11+ 5ж 4- Зж2 4- 7еж
; 38. у(ж) = 2е5ж - 2 cos 10ж
39. у& - 6у" + 12у; - 8у = О
40. уC> - 2у" 4- А.у[ - 8у = 0
42. з/F) Н-122/<4) 4- 48у" 4- <
= 0
45. у(х) = c\e~ix 4- c2e;
Згж
41. у<4> - 16у = 0
44. (а) х = г, —2г (Ь) ж = —г, Зг
46. у(ж) = cie3ix + c2e~2ix
47. у(ж) = с\ ехр ([1 + гч/з]ж) 4- сг ехр
48. у(х) = § (е* + ехр [§ (-1 4- г^з) ж]J + ехр [± (-1 - гл/з) ж])
49. у(ж) = 2е2ж — Ье~х 4- 3 cos ж — 9 sin x 52. у(х) = с\ cosC In ж) 4- сг sinC In ж)
53. у(х) = ж~3[с1 совD1пж) 4- сг втD1пж)] 54. у(х) = ci -h сг In ж + сзж~3
55. у(х) = с\ 4- ж2(сг Н- сз In ж) 56. у(х) = ci 4- сг In ж 4- сзAп жJ
57. у{х) =.ci 4- ж3 Гсгж"-^ 4- сзж+%/з) 58. у(ж) = ж-1[с1 4- с21пж 4- с3AпжJ]
Раздел 3.4
1. Частота: 2 радиан в секунду A/7Г Гц); период: 7г секунд
2. Частота: 8 радиан в секунду 4/7Г Гц); период: tt/4 секунд
3. Амплитуда: 2 м; частота: 5 радиан в секунду; период: 27г/5 секунд
4. (a) x(t) = Щ cosA2t — а) при а = 27Г — arctgE/12) « 5,8884; (b) Амплитуда: ±§ м; период: 7г/6
секунды
6. Приблизительно 7,33 мили 7. Приблизительно 10450 футов
8. 29,59 дюйма
10. Амплитуда: 100 см; период: приблизительно 2,01 секунды
11. Приблизительно 3,8 дюйма 13. (а) x(t) = 50(et/5 - е-*/2); (Ь) 4,096 точно
14. (а) ж(£) = 25е~*/5 cosC£—а) при а = arctgC/4) «0,6435; (b) огабающие ж = ±25e_t/5; псевдопериод
2тг/3
15. x{t) = 4et - 2et, 16. x(t) = 4e~3t - 2et, _
сверхзатухание u(t) = 2cosBx/21) сверхзатуханиеu(t)*t2y/& coe(V5lt-0,2149)
2k y-% ,
2
1020
Ответы к избранным задачам
17. x(t) = 5e 4tBt + 1), критическое затухание;
u(t) « §>/5coeDt - 5,8195)
5k
\
5 г ч
/
/
/и
/
\
\
V
\
18. x@ = 2e-3tcosD^-^),
затухание; u(t) = | cos E£ — Щ-)
19. x(t)^^VsTSe-^/2cosFt- 0,8254),
затухание; u(t) « ^\/233 cos (^-t - 0,5517)
-4b
, i 1 *
V
20. x(t) » 13e~4t cosB* - 1,1760), затухание;
w(<) » У^ совBл/5 * - 0,1770)
5[
21. z(£) « 10e~5t cosA0£ - 0,9273), затухание;
u{t) « 2^14 cosE\/51 - 0,6405)
V7
V
22. (b) Амплитуда, зависящая от времени, равна § \/3, частота равна 4^3 радиан в секунду, а фазовый угол
равен 7г/6.
23. (а) к « 7018 фунтов на фут; (Ь) Приблизительно после 2,47 секунды
34. Коэффициент затухания: с « 11,51 фунт/фут/секунда; жесткость пружины: А; « 189,68 фунтов на фут
Раздел 3.5
1. %,(*) = £ез*
3. 2/р(ж) = ^(cos3x — 5sin3:r)
5. 2/р(ж) = ^A3 + 3cos2x-2sin2x)
sinhx
■s(e*
c) =
7. 2/р(ж) = -
9. %,(*) = -\ + ±.Bx2 _ ж)е*
11. ур(х)= |Cж2 -2ж)
13. 2/р(ж) = ^exGsinx — 4 cos ж)
15. 2/р(ж) = -17
17. ур(х) = ^ (х2 sin ж — ж cos ж)
19. ур(х) = |A0ж2 - 4ж3 + х4)
2. уР(х) = -|E + бх)
4. yP(*) = |(-4ex+3*ex)
6. Ур(ж) = язD _ 56х + 49*2)
8. Ур(ж) = ^xsinh2x
10. Ур(ж) = iBccsin3x — 3xcos3x)
12. ур(х) = 2ж + |xsinx
14. ур(х) = ±(-Зх2ех+х3ех)
16. ур(х) = ^D5 + е3ж - бже3* + 9ж2е3ж)
18. ур(ж) = ~^B4хех - 19же2я: +6ж2е2*)
20. ур(х) = -7 + |же*
Ответы к избранным задачам 1021
21. ур(х) = xe*(Acosx + J3sinx) 22. ур(х) = Ах3 + Вх4 4- Сх5 4- Dxex
23. 2/р(х) = Ах cos 2х + J3x sin 2x 4- Сх2 cos 2х + Dx2 sin 2x
24. ур(х) = Ах 4- Вх2 4- (Сх 4- £>х2)ея:
25. 2/р(х) = Ахе"* 4- Вх2е"ж + Схе~2х 4- Dx2e~2x
26. ур(х) = (Ах + Вх2)е3ж cos 2х 4- (Сх 4- Dx2)e3x sin 2x
27. 2/р(х) = Ах cos х + Вх sin х Н- Сх cos 2х 4- Dx sin 2x
28. ур(х) = (Ах 4- Вх2 4- Сх3) cos Зх 4- (Dx + £7х2 + Fx3) sin Зх
29. ур(х) = Ах3ех + £х4еж + Схе2х + Dxe*
30. ур(х) = (А 4- J5x 4- Сх2) cos х 4- (D 4- #х 4- Fx2) sin x
31. 2/(х) = cos2x 4- f sin2x 4- |х 32. у(х) = ^AЬе~х - 16е~2ж 4- ех)
33. у(х) = cos Зх — j^ sin Зх + | sin 2x 34. y(x) — cos x — sin x 4- |x sin x
35. y(x) = exBcos x — | sinx) -f |x 4- 1
36. y(x) = ^*B34 + 240x ~ 9e~2x ~ 33e2x ~ 12x2 ~ Ax*)
37. y(x) = 4 - 4еж 4- Зхеж 4-х - |х2еж + |х3еж
38. 2/(х) = ^[е-* A76 cos x 4-197 sin x) - Fcos3x + 7sin3x)]
39. y(x) = -3 4- Зх - |x2 -f |x3 4- 4е-ж 4- xe~x 40. у (ж) = \(Ъе~х 4- 5еж 4- 10 cos x - 20)
41. ур(х) = 255 - 450х + ЗОх2 4- 20х3 4- Юх4 - 4х5
42. у(х) = 10е~ж 4- 35е2ж 4- 210 cosx 4- 390 sin x 4- 2/р(#)> где ур(х) — частное решение задачи 41.
43. (Ь) у (х) = ci cos 2x 4- сг sin 2х 4- \ cos х — ^ cos Зх
44. у(х) =е_ж/2 Гс1ссв(|хл/з) 4-c2sin (|х\/зI-f^(-3cos2x-f2sin2x)+4|2 (-15cos4x-f4sin4x)
45. 2/(х) = ci cos Зх 4- С2 sin Зх 4- ^ — jq cos 2x — ^ cos 4x
46. у(х) = с\ cos х 4- С2 sin х 4- ^ (Зх cos х 4- Зх2 sin х) 4- -^ C sin Зх — 4х cos Зх)
47. Ур(х) = \ех 48. ур(х) = -^Fх 4- l)ea:
49. ур(х) = х2е2х
50. 2/р (х) = jq Dx cosh 2х — sinh 2x)
51. ур(х) = — j(cos 2xcosx — sin2xsinx) 4- ^ (cos 5x cos 2x 4- sin5x sin 2x) = —\ cos Зх (!)
53. ур(х) = |х sin Зх 4- | (cos Зх) In | cos 3x|
55. Ур(х) = |A — xsin2x)
, = -1
54. ур(х) = -1
52. ур(х) = — ^xcos3x
(cos х) In | esc x — cot x|
56. 2/p(x) = -|ea:Cx + 2)
59. yp(x) = |x4
61. yp(x) — lnx
62. 2/p(x) = —x2 4-х In
58. yp(x) = x3(lnx — 1)
60. 2/p(x) = -fx4/3
1-х
+ -(l+x2)ln|l-x2|
Раздел 3.6
1. x(t) = 2cos2<
2. x(t) = §sin2£-sin3<
i 2%
-2
ft A ft
A
II
Ul
,H7
v
1022
Ответы к избранным задачам
3. x{t) = л/138388 cosA0t - а) + 5cosE* - /?),
где а = 2тг - arctg(l/186) « 6,2778 и /3 =
= arctgD/3) « 0,9273.
4. x(t) = 2л/1бб cosEt— a) + 10cos4t, где а
= 7Г - arctg(9/5) » 2,0779 .
375
АЛЛ
5, x(t) = (xq — C) cosivot + Ccosutf, где С = Fo/(k — mu>2)
7. xsp(t) = f§cosCt-a),
где а = 7Г - arctgA2/5) « 1,9656
8. xsp(t) = ^ cosE£ — a),
где a = 2тг - arctgC/4) « 5,6397
9- жч»(*) = ^зя!ятсовA0*-а),
40001
где а = тг + arctgA99/20) » 4,6122
-0.1
10. xsp(t) = ^\/бГ cosA0t - а),
где а = тг + arctgA71/478) «8,4851
-Н
11. XspW = ^Ш cosCt - а),
где а = 7г - arctgC) « 1,8925
xtr(t) = f л/2 e~2t cos(* - /3),
где 0 = 2тг - arctgG) и 4,8543
-0.5 h
12. xsp(t) = ^- cosCt - а), где
a = тг + arctgB/5) « 3,5221
где /? = arctgE/2)« 1,1903
-0.5
01Э€вд к т&тщым задачам 11Ш
13. x8p(t) = ;^=cosA0t-a),
где а = тг - arctgA0/37) » 2,9320
где /3 = 2тг - arctgD2l/12895) «6,2505
14. Xsp(t) ^ -s/485 cos(t — a),
гдела = arctgB2) ■•» 1,5254
xtr(t) = л/36^5 e~4t oosCt - /?),
где 0 = тг + arctgE2/31) « 4,1748
15. C(u;) = 2/V4 + a;4;
практически резонансной частоты нет.
16. С(ш) = 10/V25 + 6a;2+a;4;
практически резонансной частоты нет.
17. С(ш) = 50/V2025-54a;2+a;4;
практически резонанс наблюдается на частоте
18. С(ш) = 100/^422500 - 1200а;2 + о>4;
практически резонанс наблюдается на частоте
ш = 10>/б.
0,4 h
19. a; = \/384 радиан в секунду (приблизительно 3,12 Гц)
20. ш « 44,27 радиац в секунду (приблизительно 7,05 Гц)
21. ыо ^у/ЩЦТЩт) 22. a;0 = y/k/(m + I/a?) .
23. (а) Собственная частота: VlO радиан в секунду (приблизительно 0,50 Гц); (Ь) амплитуда: приблизительно
10,625 дюйма
Раздел 3.7
1. I(t) = 4et
3. /(t) = ^ (cos60t + 12sin60* - et)
4. I(t) = 5(e-10* - e0'); W = I(£.ln2) = 5/4.
5. /(t) = |e-10tsin60t
2. /(t) = 4A - e~5t)
1024 Ответы к избранным задачам
6. Isp(t) = ^(-21 cos 60* + 22sin60t) = E/л/37) cosF0t - а), где а = тг - arctgB2/21) » 2,3329.
7. (a) Q(t) = £7оСA - е"*/яс); /(«) = (Е0/К)е-*/нс
8. (a) Q(t) = lOte*; I(t) = 10A - 5t)e~5*; (b) Qmax = 0A/5) = 2e~1.
9. (a) Q(t) = (cos 120* + 6sin 120* - e~20t)/1480 I(t) = C6cos 120t - 6sin 120t + e~20t)/74 (b) Isl
_ jl
~ 74
^F cos 120< - sin 120<) = -jL* cosA20t - а), где a = 2тг - arctg |.
11.
Isp(t) = -iJL sinB< - (J), где S = 2тг -
arctg(l/6)« 6,1180
12. Jsp(t) = ^= sinA0< - 6), где £ = 2тг - arctg(l/4) « 6,0382
13. /sp(t) = ^== sinE< - (J), где S = 2тг - arctgB/3) « 5,6952
14. Jsp(t) « 0,9990 sinA00t - 0,8272)
16. Ap(t)» 1,6125 sinC77t- 1,2282)
18. I(t) = ^-A9e-10t - 18e-20t - e"*)
20. /(i) =
^Tfe-*t/*(VncostVn/2 +
+ 27 sin tvTl/2) + |^ (cos 2* + 6 sin 2t)
15. Jep(t) « 0,1591 sinF07r< - 4,8576)
17. I(t) = -25e~4tsin3*
19. /(t) = 10e-20t - Юе0* - 50te~10t
21.
I(t) = -§§e-*A2cos3t + 47sin3t)-f
+ |§Bcos5t + 3sin5<)
/
22. I(t) &-e~25t@,1574 cos 25t\/l59 +
+ 0,0262 sin 25<л/159) + @,1574 cos 60тг< +
+ 0,0230 sin 607г£)
-0.2
Раздел 3.8
1. Только положительные собственные значения {п27г2/4} и соответствующие собственные функции
{cos(n7rx/2)} для п = 1,3,5,
Собственное значение Ло = 0 с собственной функцией уо (ж) = 1 и положительные собственные значения
{п2} с соответствующими собственными функциями {cos па;} для п = 1,2,3,
Только положительные собственные значения {п2/4} для п — 1,2,3,...; n-я собственная функция
Уп(х) равна cos(n#/2), если п нечетное, sin(nx/2), если п четное.
Собственное значение Ло = 0 с собственной функцией уо(х) = 1 и положительные собственные значения
{п2/4} для п = 1, 2,3,...; n-я собственная функция уп (ж) равна sin(nx/2), если п нечетное, cos(nx/2),
если п четное.
5. Только положительные собственные значения {п27г2/64} для п — 1,2,3,...; n-я собственная функция
уп(х) равна cos(n7rx/8) 4- sin(n7rx/8), если п нечетное, cos(n7rx/8) — sin(n7rx/8), если п четное.
Ответы к избранным задачам 1025
7-8. На приведенном ниже рисунке точки пересечения кривой у = tgz с линиями у = ±z помечены их
координатами z. Мы видим, что ап находится чуть правее от вертикальной прямой z = Bп — 1Oг/2,
в то время как /Зп находится чуть левее от прямой z = Bn 4- 1Oг/2.
У
101- |
-10
V*
to
i
р
ы
J
/1
$f^ lis/*"*"
Глава 4
Раздел 4.1
= #2, #2 = —7xi — 3x2 4-12
= X2, X2 = X3, X3 = X4, Xf4 = —Xl + 3X2 — 6x3 + COS 3t
= X2, t2x'2 — A — £2)xi — tX2
= X2, x2 = X3, t3x3 = —5xi — 3tx2 4- 2t2X3 4- lnt
= X2, X2 =
хз, x3 = x2 4- cos xi
1. X
2. x'
3. x'
4. x'
5. x
6. X'
7. x'
8. x'
9. x
10. x
11. x(t) = Л cos i4-£ sin*, j/(£) = Б cost-Л sin t 12. x(£) = Ae* 4- Be-*, j/(i)
= X2, X2 = 5X1 - 4j/i, J/i = J/2, J/2 = _4xl + 5^l
= Z2, J/i = J/2, X2 = -fcxi • (xf 4- J/i)~3/2, J/2 = -fcj/1 ' {x\ 4- J/?)~3/2
= X2, x2 = -4xi 4- 2j/i - 3x2 J/i = J/2, J/2 = 3xi - J/i - 2j/2 4- cost
z[ = 22, x2 = 3xi — J/l 4- 22:1, j/2 = xi 4- J/i - 4zi, z2
= #2, У[ = J/2,
= X2, X2 = Xl(l - J/l) J/i = J/2, J/2 = 2/l(l - Xi)
1026 Ответы к избранным задачам
13. x(t) = A cos 2t + В sin 2t,
y(t) = -В cos 2t + A sin 2t;
rc(t) = cos2t, y(t) = sin2t
14. x(t) = A cos 10* 4- В sin lOt,
y(t) = В cos lOt - A sin lOt;
a;(t) = 3 cos lOt 4- 4 sin lOt,
y(t) = 4 cos lOt-3 sin lOt
15. x(t) = A cos 2t 4- В sin 2t,
y(t) = 4B cos 2t - AA sin 2t
16. x(t) = >lcos4t 4- Bsin4t,
y(t) = |Bcos4t- |,4sin4t
17. x{t) = Ае~ы + Be2t,
y(t) = -3Ae-3t+2Be2t;
x(t) = e2', y(t) = 2e2t
18. x(t) = Ae~2t 4- Be~5t,
l/(t) = 2Ле~2* 4- 5Be~5t; Л = ^
и Б =i — Ц- в частном решении.
Ответы к избранным задачам 1027
19. x(t) = -e-2tsin3*,
y(t) = e-2tCcos3t 4- 2 sin 3*)
5
4
4
2
1
о
-1
-2
-3
-4
-5
\\m
-I 1
ф i
•1
-1)
■I
г
ф у
A f
J, 1
Г
1 i
tl
' / «VI
'lie
j i W)
11 и i-
\ f ti t
j i a
t| 11
т 1 T
if т Т
At
T-
T-
4-
1
* r
f
r.
1 -
-5 -4 -3 -2 -
10 12 3 4 5
x
20. x{t) = {A + Bt)ezt,
y(t) = (ЗА 4- В 4- 3Bt)e3t
5
4
3
2
1
^ 0
-1
-2
-3
-4
-5
YTjry-
.? t It №
(-TltfTft |Г
t
*V i .7
-___j , r-
i.iiil '-П
-5-4-3-2-1012345
x
27. 2(J{ - J2) 4- 50/i = 100sin60t, 2(/£ - J{) 4- 25J2 = 0
28. I[ = -20(/i - /2), /2 = 40(A ~ ^2)
Раздел 4.2
1. x(t) = aie~* 4- аге2*, y(£) = аге2
2. x(t) = (ci+c2t)e-*,i/(t) = (ci-|c2+C2t)e-*
p—>—'—' / ' / I /—'/ ' /■—1
//.//./At/l/i
-5-4-3-2-1 0 1 2 3 4 5
-5-4-3-2-1 0 1 2 3 4 5
3. »(*) = f (e3* - e-2*), »(*) = gFe« - e~2t)
4. x(t) = |Ce2* - e-2t)( y(t) = §Ce2' - 5e~2t)
1028 Ответы к избранным задачам
5. x(t) — е ь{а\ cos 2t + а2 sin 2t), y(t) = —
— |e-t [(ai +a2)cos2£ 4- (a>2 — ai)sin2t]
6. x(t) = e_2tCcos3t4-9sin3t),
y(t) = e-2*Bcos3t - 4sin3t)
7.
8.
9.
10.
11.
12.
13.
14.
15.
17.
18.
19.
20.
23.
25.
27.
29.
31.
32.
33.
37.
39.
e~% y(t) = | [(ax — аг) cos 3t 4- (ai 4- аг) sin3t] 4- ^e*
+ |<*e*
+ §c4e-3'
x(t) = aie2t 4- a2e3' - §t 4- ^, y(t) = -2cne2t - a2e3' - ft - §
#(t) = cie* 4- C2e3t 4- e2t, j/(t) = —cie* 4- сге3*
#(t) =3aie*4-a2e-* - |Gcos2t 4- 4sin2t), y(t) = aie* 4-а2е~* - ±Bcos 2t 4- 4sin2t)
z(t) = e*, j/(t) = -e*
x(t) = ai cos 3t 4- CL2 sin 3t — ^e*
x(t) = cie2t 4- сге-2* 4- c3e3t 4- C4e_3t, j/(t) = — c\e2t — c2e~
#(t) = a\ cos 2* 4- a2 sin 2t 4- bi cos 3* 4- &2 sin 3t, y(t) = ^ (ai cos 2t 4- аг sin 2t) — 2Fi cos 3* 4- b2 sin 3*)
x(t) = c\ cos 2t 4- C2 sin 2* 4- | sin t, y(t) = ci cos 2t 4- c2 sin 2t 4- сз cos 2t\/2 4- C4 sin 2t-\/2 4- -^ sin t
#(t) = a\ cos t 4- a2 sin t + b\ cos 2t 4- 62 sin 2t, 2/(t) = a2 cos t — a\ sin t 4- 62 cos 2t — 61 sin 2t
x(t) = ai cost 4- a2 sint 4- 61 e2t 4- b2e~2t, j/(t) = 3a2 cost — 3ai sint 4- bie2* — foe-2*
rr(t) = |Dcie3t - 3c2e~4t), y(f) = ae3t 4- c2e*, z(t) = |(-4cie3t 4- 3c2e~4*)
x(t) = ai 4- a2e4t 4- a3e8t, j/(t) = 2ai - 2a3e8t, *(t) = 2ai - 2a2e4* -f 2a3e8t
x(t) = aie2t 4-a2e_t 4- § te_t, j/(t) = aie2t-\-b2e~t - §te_t, z(t) = aie2t - (a2 4- 62 4- §) e"* - ±te_t
Бесконечно много решений 24. Ни одного решения
Бесконечно много решений 26. Две произвольные постоянные
Нет произвольных постоянных 28. Ни одного решения
Четыре произвольные постоянные
h(t) = 2 4- e~5t [-2cos (lOt/л/б) 4- 4л/бвт (lOt/л/б)], /2(t) = B0/л/б) е~ы sin (lOt/л/б)
/i(t) = ^(UOe-25^3 - 120cos60t 4- 1778sin60t), I2(t) = Тз^Т(-240е-25*/3 4- 240cos60t +
4-1728sin60t)
h(t) = |B + e0*), I2(t) = |A - e-60')
(a) x(t) = a\ cos 5t4-a2 sin5t4-bi cos bty/S+ 62 sin5t\/3, y(t) = 2a\ cos 5t4-2a2 sin5t— 2&i cos
— 262 sin 5t\/3; (b) В собственной моде с частотой и\ = 5 массы двигаются в том же самом направлении,
тогда как в собственной моде с частотой и>2 = 5\/3 они двигаются в противоположных направлениях.
В каждом случае амплитуда движения тела массой т2 вдвое больше амплитуды тела массой гщ.
x(t) = a± cos t 4- a2 sin t 4- Ь\ cos 2t 4- b2 sin 2t,
y(t) = 2ai cos t 4- 2a2 sin t — b\ cos 2t — 62 sin 2t.
В собственной моде с частотой a>i = 1 массы двигаются в том же самом направлении, причем амплитуда
движения второй материальной точки вдвое больше амплитуды первой материальной точки. В собственной
моде с частотой ш2 = 2 они двигаются в противоположных направлениях с той же самой амплитудой
движения.
Ответы к избранным задачам
1029
43
3
2
1
к 0
-1
-2
-3
, 1
^:
(
\
= cos(f)
1 1
2cos@
/1
2тс
г
371
40. x(t) = ai cos 5t 4- <*2 sin 5t + 6i cos lOt 4- 62 sin 10£,
2/(t) = 2ai cos 5£ 4- 2аг sin 5t — 61 cos lOt — 62 sin lOt.
41. x(i) = a\ cos t 4- аг sin t + b\ cos 3* 4- 62 sin 3t, y(t) = a\ cos t + 0,2 sin t — &i cos 3t — 62 sin 3t.
В собственной моде с частотой u>i = 1 массы двигаются в том же самом направлении, в то время как
в собственной моде с частотой о>2 = 3 они двигаются в противоположных направлениях. В каждом случае
амплитуды движения этих двух масс равны.
Х2 - COSC0
0 к 2%
t
42. x(t) = a\ cos t + a,2 sin t 4- 61 cos 2i 4- 62 sin 2t,
y(t) = a\ cos t 4- аг sin t — J61 cos 2£ — ^62 sin 2£.
x(t) = a\ cos t + a,2 sin £ 4- bi cos i"\/5 4- &2 SU1 *>/5»
y(£) = a\ cos i4- аг sin t — 61 cos £\/5 — 62 sin £\/5.
В собственной моде с частотой a>i = 1 массы двигаются в том же самом направлении, в то время как
в собственной моде с частотой и>2 = л/б они двигаются в противоположных направлениях. В каждом
случае амплитуды движения этих двух масс равны.
1030 Ответы к избранным задачам
2г
-2
\ г
^2 = cos(/"v5)
27С
44. #(£) = a\ cos t\/2 4- аг sin £\/2 4- &i cos 2t 4- 62 sin 2t,
у(£) = ai cos ty/2 -f a2 sin £л/2 — &i cos 2£ — 62 sin 2£.
45. x(t) = ai cos £\/2 4- Q-2 sin t-\/2 4- b\ cos £\/8 4- 62 sin ty/S,
y(t) = ai cos ty/2 4- аг sin ty/2 — \b\ cos t-s/8 — 5 62 sin ty/8.
В собственной моде с частотой a>i = л/2 эти две материальные точки заданных масс двигаются в том
же самом направлении с равными амплитудами колебания. В собственной моде с частотой a>2 = VS =
= 2\/2 эти две материальные точки заданных масс двигаются в противоположных направлениях, причем
амплитудатг равна половине амплитуды mi.
46. x(t) = a\ cos 2t 4- 0,2 sin 2t 4- b± cos 4t 4- 62 sin 4£,
у (t) = ai cos 2t 4- a>i sin 2t — 61 cos 4t — 62 sin At.
Раздел 4.3
Формат для первых восьми ответов следующий: (x(t),y(t)) в точке t = 0,2, причем для вычисления
применяется метод Эйлера, усовершенствованный метод Эйлера, метод Рунге-Кутта, а в самом конце приводятся
фактические значения.
1. @,8800,2,5000), @,9600,2,6000), A,0027,2,6401), A,0034,2,6408)
2. @,8100, -0,8100), @,8200, -0,8200), @,8187, -0,8187), @,8187, -0,8187)
3. B,8100,2,3100), C,22100, 2,6200), C,6481, 2,9407), C,6775,2,9628)
4. C,3100,-1,6200), C,8200,-2,0400), D,2274,-2,4060), D,2427,-2,4205)
5. (-0,5200,2,9200), (-0,8400,2,4400), (-0,5712,2,4485), (-0,5793,2,4488)
6. (-1,7600,4,6800), (-1,9200,4,5600), (-1,9029,4,4995), (-1,9025,4,4999)
7. C,1200,1,6800), C,2400,1,7600), C,2816,1,7899), C,2820,1,7902)
8. B,1600, -0,6300), B,5200, -0,4600), B,5320, -0,3867), B,5270, -0,3889)
9. При t = 1 мы получаем (х,у) = C,99261,6,21770) (h = 0,1) и C,99234, 6,21768) (h = 0,05);
фактическое значение равно C,99232,6,21768).
Ответы к избранным задачам 1031
10. При t = 1 мы получаем {х,у) = A,31498,1,02537) (h = 0,1) и A,31501,1,02538) (h = 0,05);
фактическое значение равно A,31501,1,02538).
11. При t = 1 мы получаем (ж, у) = (-0,05832,0,56664) (h = 0,1) и (-0,05832,0,56665) (h = 0,05);
фактическое значение равно (—0,05832,0,56665).
12. Мы решили уравнение х' = у, у' = —х + sint, х@) = у@) = 0. При h = 0,1 и также при h = 0,05 мы
получаем фактическое значение жA,0) « 0,15058.
13. Рунге-Кутта, h == 0,1: приблизительно 1050 футов приблизительно за 7,7 секунды
14. Рунге-Кутта, h = 0,1: приблизительно 1044 фута приблизительно за 7,8 секунды
15. Рунге-Кутта, Л = 1,0: приблизительно 83,83 мили приблизительно за 168 секунд
16. При 40°: 5,0 с, 352,9 фута; при 45°: 5,4 с, 347,2 фута; при 50°: 5,8 с, 334,2 фута (все значения
приближенные)
17. При 39,0° дальность полета приблизительно равна 352,7 фута. При 39,5° она составляет 352,8; при 40° —
352,9; при 40,5° - 352,6; при 41,0° - 352,1.
18. Чуть меньше 57,5° 19. Приблизительно 253 футов в секунду
20. Максимальная высота: приблизительно 1005 футов, достигается приблизительно за 5,6 с; дальность полета:
приблизительно 1880 футов; время движения вверх: приблизительно 11,6 с
21. Метод Рунге-Кутта при h = 0,1 дает следующие результаты: (а) 21400 футов, 46 с, 518 футов в секунду;
(Ь) 8970 футов, 17,5 с; (с) 368 футов в секунду (при t« 23).
Глава 5
Раздел 5.1
1.
2.
3.
(а)
13 -18"
23 17
>
(АВ)С = А(ВСГ
АВ
~ [ 46 -
8
-1
0 -1
2 19
-33 -7 ]
-27 103 J
11
(с)
4. Ау
5. (а)
(с)
2t2
ВА =
- cost
3t2 — 4 sin 14- 5 cos t
-14
0
, Bx =
21
4
-27
0
10
16
2
44
34
-6
31
58
Г
9
45
1
-15
-23
;(b)
;(<*)
9
-5
-25
-10
18
11
-9 -11"
47 -9
A(B + C) =
-12 14"
0 7
8 -13
" 2t + 3e~*
-14*
6* - 2e~*
-13"
24
26
' (d) [ 14
AB + AC =
-37
-8
-18
68
-4
-8
21
-8
-19
-8
12
22
5
-10
6
Г 3 — t 2 -1
(e) 0 4-t 3
[ -5 2 7-t
7. det(A) = det(B) = 0
1 - 8t 4- 18t2
9. (AB)'=
11. x =
15. x =
17. x =
3 4- 3t2 - 4t3
0
3
x л
.У J
Г X
У
Lz
Г X
У
L z
. p(*)=[
..рад=
. p(*>=
-3"
0
1
0
1
-4
0
6
1 4- 2t - 12t2 4- 32t3 1
8* 4- 3t2 4- 4*3
0
8. det(AB) = det(BA) = 144
.f(*) =
13.
, P(t) =
.*(*) =
3e*
-t2
,f(*) =
1032 Ответы к избранным задачам
19. х =
21. W(t)
' Xi '
Х2
хз
Х4
,Р(<) =
= е3'; x(t) =
0]
0
3
0
. т =
'о!
о
0
0
23. W(t) = 4; x(t) =
25. ИГ(*) = 7е-3*;*(*) =
26. WT(t) = 16e9*; x(t) =
27. W(t) = S;x(t) =
2с\ег +C2e2t
-3cie* - c2e2t
c\e2t 4- C2e~2t
cie2t +5c2e~2t
3cie2t + c2e_5t
2cie2* + 3c2et
2cie* - 2c2e3t 4- 2c3e5t
2cie* -2c3e5t
cie* 4-сге3* 4- сзе5*
cie2t 4- с2е~г
cie2t 4- сзе-*
22. W(t) = -5e3t; x(t)
24. Wit) = e5*; x(t) =
cie3t 4- 2сге
3cie3t 4-сге-
cie3t 4- сге2*
-cie3t — 2c2e2t
c\e2t — (c2 4- сз)е
28. W(t) = -84e7'; x(t) :
29. WT(t) = e2t; x(t) =
30. W(t) = 1; x(t) =
ci 4- 2c2e3t - c3e4t
6ci 4- 3c2e3* 4- 2c3e4t
-13ci -2c2e3t + c3e4t
3cie~2t 4- сге* + tee3*
сге
2cie-2*
2cie-2* 4- с2ег
cie-t 4- C4e*
c3e*
сге-* 4- 3c4e*
cie-t — 2c3e*
32. x = 7xi - 2x2
34. x= | Cxi -2x2)
36. x = 7xi 4- 3x2 4- 5x3
38. x = -2xi 4- 15x2 - 4x3
40. x = 13xi 4- 41x2 4- Зхз - 12x4
31. X = 2X1 — X2
33. x = 15xi — 4x2
35. x = xi 4- 2x2 4- хз
37. x = 3xi — 3x2 — 5хз
39. x = 3xi 4- 7x2 +x3- 2x4
41. (a) X2 = txi, так что ни одно не равно постоянному числу, умноженному на другое, (b) W(xi, хг) = 0,
тогда как из теоремы 2 следовало бы что W Ф 0, если бы xi и хг были независимыми решениями системы
указанного вида.
Раздел 5.2
1. xi(t) = с\е~г 4- c2e3t, x2(t) = ■
2. xi(t) = cie_t 4- Зс2е4*, x2(t) = -с\е~1 4- 2c2e4t
3. Общее решение #i(i) — c\e~l 4- 4сге6*, x2(t) — —с\е~г 4- Зсге6*
Частное решение x\{t) = \(-е~* 4- 8e6t), x2(t) = \(е-* 4- 6e6t).
Ответы к избранным задачам 1033
4. xi(t) = c\e~2t 4- c2e5t,
x2(t) = ~6cie~2t 4- сге5
/ 5. xi(t) = с\е~1 4- 7c2e5t,
x2(t) — c\e'1 + c2ebt
5
4
3
2
1
0
-1
-2
-3
-4
—1 1 1 1 1 1 1 1—-г»"—i ту
*~ k" k^ k"~ br~ 4r~ &''kr if V "
C- 4^ *T <T-** Г У **••=*•-"**—^
A- . ,..^*r ,1
-5-4-3-2-1012345
6. Общее решение #i(£) = 5cie3t 4- сге4*,
a?2(t) = -6ae3t - c2e4t
Частное решение x\{t) = — 5e3t + 6e4t,
a:2(t) = 6e3t-6e4t.
7. xi(t) =c\el + 2c2e~
x2(t) = c\eb — 3c2e~
5
4
3
2
1
о
-1
-2
-3
-4
-5
лл\л ^
Л'-v.v-vi >
X \ \ v ч
-V W^'
A i i i i ■.
т—i—i—i—iv
4 ^ \ \ \
\".\ \ A'.V
^ \ \ \ 1
-5-4-3-2-1012345
8. #i(£) = 5ci cos2* + бег sin2£, x2(t) = (ci — 2сг) cos 2* 4- Bci 4- c2) sin2t
5
4
3
2
1
»? 0
1 1 1 1 1
b-(^^^-4r
F< $T kr &"-*?* <
> t^tcr; Ar-^ <
^ ^ -> -* "■
L -^ —» -^ —> —
Г_^ и> .-» —> г
л —1 1 ил' .
г»4—1 1 1 г
- <г- <— <— <~ "
^ «-<-<- ^- "
г- <- ^- ^ ^ "
j> Si Si Si /
1^, ^ ^ ^i ^
> ^f ^Г ^ ^1 ^
у ^ ^ ^} ^t >
1 1 1 1 1—
-2
-3
-4
-5
-5-4-3-2-1012345
9. Общее решение х\ (t) = 5ci cos At + bci sin 4t, x2 (t) = c\ B cos 4t 4- 4 sin At) 4- C2 B sin At — A cos At).
Частное решение xi(t) = 2cos4£ — ^ sin4t, x2(t) = 3cos4* 4- \ sin At
1034 Ответы к избранным задачам
10. xi(t) = -2ci cos3t - 2с2 sin3£, x2(t) = Cci + 3c2),cos3* + Cc2 - 3ci) sin3t
11.' Общее решение xi(t) = e*(ci cos 2t — C2 sin 2t), X2(t) = e*(ci sin2t 4- c2 cos 2t)
Частное решение x\(t) = —4e* sin2£, X2(t) = 4e* cos2t
12. si(t) :
13. Ж1(*):
14. xi(t) ■
15. XI (t) :
16. XI (t) :
e2t(-5cicos2£-5c2sin2£), x2(t) = e2t[(ci 4- 2c2) cos2£ + (-2ci 4-c2)sin2£]
3e2t(ci cos3£ — C2 sin3£), X2(t) = e2t[(ci 4- c2) cos3£ + (ci — сг) sin3£]
e3t(ci cos 4* 4- C2 sin4£), x2(£) = e3t(ci sin4£ — сг cos4£)
5e5t(ci cos4t - сг sin4t), X2(t) = e5t[Bci 4- 4c2) cos At 4- Dci - 2c2) sin4£]
- —lot + 2c2e-100*, x2(t) = 2cie-10t "- —10°*
e5t
= cie
- 5c2e
5
4
3
2
1
0
-1
-2
-3
-4
-5
21
17. xi (t)
a?2(*)
x3(t)
19. xi (t)
x2(t)
xs(t)
xi(t)
x2(t)
x3(t)
23. xi (t)
Z2(*)
x3(t)
24. xi(t)
x2(t)
x3(t)
25. xi(t)
x2(t)
xs(t)
= cie9t 4- c2e6t 4- сз,
= Cle9t - 2c2e6t,
= cie9t 4- c2e6t - сз
= cie6* -hc2e3t 4-c3e3t,
= cie6* - 2c2e3t,
= c%e6t 4- c2e3t — c3e3*
= 6ci 4- 3c2e* 4- 2c3e-t,
= 2ci 4- c2e* 4- c3e-t,
= 5ci 4- 2c2e* 4- 2c3e_t
= cie2* 4-сзе3*,
= —cie2* 4- C2e"
= -c2e~2t 4- c3e3t
= cie* 4- c2B cos 2t - sin 2t) 4- c3(cos 2t 4- 2 sin 2t)
= -cie* - c2C cos 2t 4- sin 2t) 4- c3(cos 2t - 3sin 2t)
= c2 C cos 2t 4- sin 2t) 4- c3 C sin 2t - cos 2t)
= ci 4- e2t [(c2 4- c3) cos 3£ 4- (—c2 4- c3) sin St],
= —c\ 4- 2e2t (—С2 cos St — c3 sin 3£), ч
= 2e2t (c2 cos 3£ 4- c3 sin 3t)
2t - c3e3t,
c\e9t 4-4c3,
2cie9t 4- сге6* - c3,
2cie9t — сге6* — c3
18. xi (t)
x2(t)
x3(t)
20. xi (t)
x2(t)
a*(t)
22. xi (t)
x2(t)
X3(t) = ~cie~2* 4- c3e;
= cie"
2c2e6
cie9* 4- сге6* — c3e2t
,3*
Ответы к избранным задачам 1035
xi(t) = 4e3t — e~*Dcost — sint),
X2(t) = 9e3t - e"*(9cost + 2sint),
x3(t) = 17e~*cost
xi{t) = 15e-°»2t, x2(t) = 15(e-°'2t - e*4').
Максимальное количество в резервуаре 2 равно
#2E In 2) = 3,75 фунта.
28. xi(t) = 15e-°'4t,
#2(*)=40(~e~0»4t+e'25t).
Максимальное количество в резервуаре 2
приблизительно равно 6,85 фунта.
si(t) = 10 + 5e-°'6t,
x2(t) = 5 - 5е-°>6*
30. zi(t)=5ci + c2e-°>65t,
^2(*)=8ci-c2e-0'65t.
1036 Ответы к избранным задачам
31. a*(t) = 27e~*,
x2(t) = 27е~* - 27e~2t,
z3(t) = 27е"* - 54е~2' + 27e~3t.
Максимальное количество соли в резервуаре 3
равно жзAпЗ) = 4 фунта.
32. zi(*) = 45e~3t,
<c2(t) = -135et + 135е*,
x3(t) = 135et - 270et + 135е~*.
Максимальное количество соли в резервуаре 3
равно жзAпЗ) = 20 фунтов.
33. si(*)=45e-4t,
x2(t) = 90e~4t - 90e~6t,
x3{t) = -270е~4* + 135e~6t + 135e~2t.
Максимальное количество соли в резервуаре 3
равно хз (\ In 3) = 20 фунтов.
34. xi(t) =40e~3t,
x2(t) =60et -60e~5t,
x3(t) = -150et + 75et + 75е~*.
Максимальное количество соли в резервуаре 3
равно хз(| In 5) « 21,4663 фунта.
35. XI(t) = 10 - i E5e8t - 216e-nt),
x2(t) = 3 - i A65e-18t - 144e-nt),
жз(«) = 20 + \ B20e8t - ЗбОе1*).
Предельные количества соли в резервуарах 1, 2 и 3 соответственно равны 10 фунтов, 3 фунта и 20 фунтов.
Ответы к избранным задачам 1037
36. X!(t) = 4 4- e-3*/5[14cosCt/10) - 2sinC*/10)],
x2(t) = Ю - e-3t/5[10cosCt/10) - 10sinCt/10)],
x3(t) = 4 - e-3t/5[4cosCt/10) + 8sinCt/10)].
Предельные количества соли в резервуарах 1, 2 и 3 соответственно равны 4 фунта, 10 фунтов и 4 фунта.
15
10
5
П
\*1
**г
—i
*2
-
1
10
37. xi(t) = 30 4- e-3t[25cos(t\/2) + 10y/2an(ty/2)]9
x2{t) = 10 - е-3*[10сов(*л/2) - ^y/2sin{tV2)],
x3(t) = 15 - е-3*[15со8(«л/2) + %y/2rin(ty/2l)].
Предельные количества соли в резервуарах 1,2 и 3 соответственно равны 30 фунтов, 10 фунтов и 15 фунтов.
38, xi(t) = cie*.
x2(t) = -2cie* + c2e2t,
z3(t) = 3cie* - 3c2e2t + c3e3t,
ж4(*) = -4cie* + 6c2e2t - 4c3e3t -f c4e4t
39. a?i(t) = 3cie* + c4e~2t,
12W = -2cie* + c3e2*
X3(t) = 4cie* + c2e_t,
X4(t) = cie*
■ c4e
1038
Ответы к избранным задачам
40. X!(t)
x2{t)
x3(t)
x4(t)
41. xx(t) =
42. x(t) =
43. x(t) =
44. x(t) =
45. x(t) =
46. x(t) =
47. x(t) =
48. x(t) =
49. x(t) = ci
50. x(t) = a
Раздел 5.3
= -3cie2t + 3c2e_2t - c4e-5t,
5t
: сзе'
: —С2б
: 2e10t
ci
ci
ci
c\
ci
c\
c\
3"
-1
2 J
з:
-1
3]
-2
2 J
ll
1
1
-1 J
3]
2
-1
1 J
2]
2
1
-1 J
ll
2
-1
2J
2t - 3c3e5t
15< - x4(t), x2(*)
1"
+ e
+ C2
e2t + c3
-e10t + 2e15t=z3(t)
2"
-3
1
+ C2
Г 1
0
3
1
1
0
1
1
1
0
1
e~3t + c2
;+C2
1
1
1
7
1
5
1
2
-1
1
1
2
2
-1
1
2
-1
1
2
5
1
-1
0
3
0
-1
1
1
e4t + c3
+ c3
+ C3
e5*
1
-1
3
5
-3
3
p8t
1
-1
2
-1
' +С4
3
-2
3
-3
1
p8t
-1
2
-1
- o-
3
0
-1
. 1.
+ C3
- 11
. 1 -
0
0
0
1
L l
et + c3
0
1
0
1
0
L 1 J
; +C4
e6t + c5
01
0
1
0
1
0j
2
0
5
2
L 1
p9t
;+C5
„9t
+ C6
0
0
1
-1
-1
oj
1. Собственные частоты wo = 0 и wi = 2. В выродившейся собственной моде с "чacтoтoй,, а>о = 0 эти
две материальные точки заданных масс двигаются прямолинейно, причем xi(t) = X2(t) = ao 4- bot. При
частоте a;i = 2 они колеблются в противоположных направлениях с равными амплитудами.
2. Собственные частоты ш\ = 1 и а>2 = 3. В собственной моде с частотой ш\ эти две материальные точки
заданных масс т\ и тг двигаются в том же самом направлении с равными амплитудами колебаний. В
собственной моде с частотой Ш2 они двигаются в противоположных направлениях с равными амплитудами.
3. Собственные частоты u>i = 1 и о>2 = 2. В собственной моде с частотой ш\ эти две материальные точки
заданных масс т\ и тг двигаются в том же самом направлении с равными амплитудами колебания. При
частоте и>2 они перемещаются в противоположных направлениях, причем амплитуда колебаний
материальной точки массы т\ вдвое больше, чем амплитуда колебаний материальной точки массы га2.
4. Собственные частоты ш\ — 1 и а>2 = \/5. В собственной моде с частотой ш\ эти две материальные
точки заданных масс т\ и тг двигаются в том же самом направлении с равными амплитудами колебаний.
В частоте и>2 они двигаются в противоположных направлениях с равными амплитудами.
Ответы к избранным задачам 1039
5. Собственные частоты ы\ = л/2 и ыг = 2. В собственной моде с частотой ш\ эти две материальные
точки заданных масс т\ и Ш2 двигаются в том же самом направлении с равными амплитудами колебания.
В частоте U2 они двигаются в противоположных направлениях с равными амплитудами.
6. Собственные частоты и\ = у/2 и LJ2 = y/S. В собственной моде с частотой и\ эти две материальные
точки заданных масс т\ и Ш2 двигаются в том же самом направлении с равными амплитудами колебания.
В собственной моде с частотой и>2 они перемещаются в противоположных направлениях, причем амплитуда
колебаний материальной точки массы т\ вдвое больше, чем амплитуда колебаний материальной точки
массы гаг.
7. Собственные частоты и\ — 2 и U2 — 4. В собственной моде с частотой и\ эти две материальные точки
заданных масс т\ и Ш2 двигаются в том же самом направлении с равными амплитудами колебания.
В частоте U2 они двигаются в противоположных направлениях с равными амплитудами.
8. x\(t) = 2cost 4- 3cos3* — 5cos5t, X2(t) = 2cost — 3cos3t 4- cos5t. Мы имеем наложение трех
колебаний, в которых данные две материальные точки перемещаются A) в том же самом направлении
с частотой wi = 1 и равными амплитудами; B) в противоположных направлениях с частотой U2 — 3
и равными амплитудами; C) в противоположных направлениях с частотой ыз = 5, причем амплитуда
колебаний материальной точки массой т\ в 5 раз больше, чем амплитуда колебаний материальной точки
массой ГП2.
9. х\ (t) = 5 cos t — 8 cos 2t 4 3 cos 3t, X2 (t) = 5 cos t4- 4 cos 2t — 9 cos 3t. Мы имеем наложение трех
колебаний, в которых данные две материальные точки перемещаются A) в том же самом направлении с частотой
Ш1 = 1 и равными амплитудами; B) в противоположных направлениях с частотой Ш2 = 2, причем
амплитуда колебаний материальной точки массой т\ вдвое больше, чем амплитуда колебаний материальной
точки массой тг; C) в противоположных направлениях с частотой из = 3, причем амплитуда колебаний
материальной точки массой т2 в 3 раза больше, чем амплитуда колебаний материальной точки массой mi.
10. x\(t) = cos2t — 15cos4t 4 14cost, X2(t) = cos2t 4- 15cos4t 4- 16cost. Мы имеем наложение трех
колебаний, в которых данные две материальные точки перемещаются A) в том же самом направлении
с частотой uj\ = 1, причем амплитуда колебаний материальной точки массой гп2 в 8/7 раза больше, чем
амплитуда колебаний материальной точки массой т\; B) в том же самом направлении с частотой uj2 = 2
и равными амплитудами; C) в противоположных направлениях с частотой ыз = 4 и равными амплитудами.
11. (а) Собственные частоты uj\ — 6 и tJ2 = 8. В моде 1 эти две материальные точки заданных масс
колеблются в том же самом направлении с частотой u;i = 6, причем амплитуда колебаний материальной
точки массой mi вдвое больше, чем амплитуда колебаний материальной точки массой тг. В моде 2 эти
две материальные точки заданных масс колеблются в противоположных направлениях с частотой и>2 = 8,
причем амплитуда колебаний материальной точки массой rri2 в 3 раза больше, чем амплитуда колебаний
материальной точки массой mi. (b) x(t) = 2sin6t 4 19cos7t, y(t) = sin6t + 3cos7t
Мы имеем наложение (только двух) колебаний, в которых эти две материальные точки заданных масс
перемещаются A) в том же самом направлении с частотой lji — 6, причем амплитуда колебаний материальной
точки массой т\ вдвое больше, чем амплитуда колебаний материальной точки массой тг; B) в том же
самом направлении с частотой ыз = 7 причем амплитуда колебаний материальной точки массой т\ в 19/3
раза больше, чем амплитуда колебаний материальной точки массой Ш2.
12. Три собственных моды системы колебания имеют A) собственную частоту w\ = у/2 с отношением
амплитуд 1:0: — 1; B) собственную частоту ыг = у 2 + у/2 с отношением амплитуд
C) собственную частоту о;з = V 2 — \/2 с отношением амплитуд
1:\/2:1.
13. Три собственных моды системы колебания имеют A) собственную частоту ш\ = 2 с отношением амплитуд
1:0: — 1; B) собственную частоту Ш2 = у4 4 2\/2 с отношением амплитуд 1: — л/2:1; C) собственную
частоту из = у4 — 2\/2 с отношением амплитуд 1: у/2:1.
15. xi(t) = | cos5t—2cos5<\/3t+f cos lOt, X2(t) = | cos 5t+4cos 5\/3 t-h^ cos lOt. Мы имеем наложение
двух колебаний с собственными частотами lj± = 5 и U2 = 5\/3 и вынужденное колебание с частотой и; =
= 10. В каждом из двух собственных колебаний амплитуда колебаний материальной точки массой тг
вдвое больше, чем амплитуда колебаний материальной точки массой га ь в то время как в вынужденном
колебании амплитуда колебаний материальной точки массой rri2 в четыре раза больше, чем колебаний
материальной точки массой т\.
21. (а) ш\ « 1,0293 Гц; о;2 « 1,7971 Гц. (b) v\ « 28 миль в час; v2 « 49 миль в час
23. ш\ = 2\/1б, vi « 40,26 (фута в секунду (приблизительно 27 миль в час), U2 = Ъу/Ъ9 V2 « 71,18 фута
в секунду (приблизительно 49 миль в час)
24. и\ « 6,1311, v\ « 39,03 фута в секунду (приблизительно 27 миль в час) Ш2 « 10,3155, г>2 « 65,67 фута
в секунду (приблизительно 45 миль в час)
1040 Ответы к избранным задачам
25. uj\ « 5,0424, v\ « 32,10 фута в секунду (приблизительно 22 мили в час), U2 '•
в секунду (приблизительно 43 мили в час)
Раздел 5.4
; 9,9158, v2 « 63,13 фута
1. Кратное собственное значение Л = — 3,
собственный вектор v = [ 1 — 1 ] ; x\{t) =
= (ci + С2 + C2t)e~3t, X2(t) = (—с\ — C2t)e~3t
2. Кратное собственное значение Л
ственный собственный вектор v =
xi(t) = (С1+С2+С2*)е2*,ж2(*) =
= 2, един-
= [i i]T;
(ci-hc2t)e2t
3. Кратное собственное значение Л = 3, собственный вектор v = [ — 2
- 2c2t)e3t, x2(t) = Bci + 2c2t)e3t
4. Кратное собственное значение Л = 4, единственный собственный вектор v = [
= (—с\ +С2 — C2*)e4t, X2{t) = (ci 4- C2*)e4t
5. Кратное собственное значение Л = 5,
собственный вектор v = [ 2 -4 ]Т; x\(t) = Bci +
+ с2 + 2c2t)e5t, x2(t) = (-4ci - 4c2t)e5t
Xl(t) = (-
-2C1 + C2 —
-1 1]T; xi(t) =
6. Кратное собственное значение Л
ственный собственный вектор v =
= 5, един-
[-4 41Т:
xi(t) = (-4ci +с2
+ 4c2t)e5t
^
7. Собственные значения Л = 2, 2, 9 с тремя линейно независимыми собственными векторами; xi(t) =
= c\e2t + C2e2t, ж2(£) = c\e2t + c3e9t, ж3(£) = C2e2t
8. Собственные значения Л = 7, 13, 13 с тремя линейно независимыми собственными векторами; x\{t) =
= 2cie7t - c3e13t, x2(t) = -3cie7t + c3e13t, ж3(*) = cie7* + c2e13*
9. Собственные значения Л = 5, 5, 9 с тремя линейно независимыми собственными векторами; xi(t) =
= cie5t 4- 7c2e5t + Зс3е9*, ж2(*) = 2cie5t, aj3(t) = 2c2e5* + c3e9*
10. Собственные значения Л = 3, 3, 7 с тремя линейно независимыми собственными векторами; x\(i) =?
= 5cie3t - 3c2e3t + 2c3e7t, x2(t) = 2cie3t + c3e7t, ж3(£) = c2e3t
Ответы к избранным задачам 1041
11. Тройное собственное значение Л = — 1 дефекта 2; 12. Тройное собственное значение Л = — 1 дефекта 2;
xi(t) = (-2с2 4- сз - 2с3*)е-*, хг(г) = e~*(ci + c3 4- c2t 4- \c3t2)
x2(t) = (ci - c2 4- c2t - c3t 4- |c3t2)e-*, X2(t) = e-*(ci 4- c2t 4- §c3t2),
x3(t) = (c2 + c3t)e-* X3[t) = е-*(с2 4- c3*)
13. Тройное собственное значение Л = — 1 дефекта 2; x\(t) = (ci -f c2t 4- \c3t2)e~b,
x2(t) = Bc2 4- сз 4- 2cst)e-*,
жз(£) = (c2 + c2*)e_t
14. Тройное собственное значение Л = — 1 дефекта 2;
xi(t) = e-*Eci 4- с2 4- сз + bc2t + c3t 4- §с3*2),
x2(t) = e-*(-25ci - 5c2 - 25c2* - bc3t - Щс3Ь2),
x3(t) = e-*(-5ci 4- 4c2 - 5c2* 4- 4c3* - § c3t2^
15. Тройное собственное значение Л = 1 дефекта 1;
xi(t) = Cci + сз - Зс3*)е*,
x2(t) = (-ci 4- сз*)е*, X3(t) = (с2 4- сз*)е*
17. Тройное собственное значение Л = 1 дефекта 1;
xi(*) = Bci4-c2)e',
x2(t) = (-Зс2 4- сз 4- 6c3t)e*,
x3(t) = -9(ci 4-сз*)е*
19. Двойные собственные значения Л = — 1
и Л = 1, каждое с дефектом 1;
x\(t) = с\е~ъ +С4в*,
x2(t) = с3е*,
хз(Ь) = C2e_t + Зс4в*,
16. Тройное собственное значение Л = 1 дефекта 1;
xi{t) = е*Cс1+3с2+с3)
x2(t) = e*(-2ci - 2c3t),
жз(г) = е*(-2с2 + 2с3г)
18. Тройное собственное значение Л = 1 дефекта 1;
x\{t) = e*(-ci - 2с2 Ч- сз),
x2(t) = е*(с2+с3*),
x3(t) =e*(ci -2c3t)
20. Собственное значение Л = 2 с кратностью 4 и
дефектом 3;
xi(t) = (ci+C3+C2t+c4t4-!c3t2 + £c4t3)e2t,
x2(t) = (с2 + c3t 4- |c4t2)e2t,
x3(t) = (сз 4- c4t)e2t, x4(t) = c4e2t
X4{t) = c\e z — 2c3ez
Собственное значение Л = 1 с кратностью 4 и дефектом 2; x±(t) = (—2с2 + сз — 2сз*)е*, x2(t) = (сг 4-
4- с3*)е*, x3(t) = (с2 + с4 4- c3t)e*, x±(t) = (ci 4- с2* 4- |c3t2)e*
22. Собственное значение Л = 1 с кратностью 4 и дефектом 2; xi(£) = (с\ 4-Зсг +С4 + С2* + Зсз*4- ^сз*2)е*,
x2(t) = -Bс2 - сз 4- 2с3*)е*, x3(t) = (с2 4- c3t)e*, ж4(£) = -Bci 4- 6с2 4- 2с2* 4- 6с3* 4- с3*2)е*
21
23. x(£) = civie * + (C2V2 4- C3V3)e3t, причем
vi = [ 1 -
v2 = [ 4 0
v3 = [ 0 2
9]T.
1]T
24. x(£) = civie * 4- (c2V2 4- C3V3)e3
vi = [5 3 -3]T,
v2 = [4 0 -1]T,
v3 = [2 -1 0]T
, причем
о]
25. x(t) = [civi 4- c2(vit 4- v2) 4- c3 (§vi*2 4- v2t 4- v3)] e2t, причем
vi = [-1 0 -1]T,
v2=[-4 -1
v3 = [ 1 0 0 ]
26. x(t) = [civi 4- C2(vit 4- V2) 4- c3 (|vit2 + v2t 4- V3)] e3t, причем
vi =[0 2 2]T,
v3=[2 1 -3]T
v3=[l 0 0]T
27. x(£) = [civi + C2(vi* 4- V2) 4- C3V3]e2t, причем
vi =[-5 3 8]T,
v2=[l 0 0]T,
v3=[l 1 0]T
28. x(t) = [civi 4- C2(vi* 4- v2) + c3 (|vit2 + v2t + v3)] e2t, причем
vi = [119 -289 0]T,
v2=[-17 34 17 ]T
v3=[l 0 0]T
29. x(t) = [civi 4- c2(v\t + V2)]e~* + [C3V3 + C4(v3t 4- v4)]e2t, причем
vi = [1 -3 -1 -2]T,
1042 Ответы к избранным задачам
v2=[0 1 0 0]Т,
v3=[0 -1 1 0]Г,
v4=[0 0 2 1]Т
30. х(£) = [civi + C2(vit + V2)]e~* + [C3V3 4- C4(v3* 4- уг±)]е2\ причем
vi = [0 1 -1 -3]T,
v2=[0 0 1 2]T,
v3=[-l 0 0 0]T,
v4=[0 0 3 5]T
31. x(t) = [civi + C2(vit 4- V2) 4- сз (|vit2 -f V2t 4- V3) 4- C4V4] e*, причем
vi = [42 7 —*
v2 = [ 34 22
V3=[-l 0 0 0]Q
v4=[0 1 3 0]T
32. x(t) = (civi + C2V2)e2t + (C3V3 4- C4V4 4- C5Vs)e3*, причем
vi =[8 0 -3 1 0]Г,
0 3]T,
-21 -42 J1.
-10 -27 ]Г,
V2=[l
v3=[3
v4= [2
V5= [1
33. xi(«) = [
X2(t) =
xs(t) =
X4(*) = [
34. xi(«) =
X2(t) =
оГ
xs(t) =
x4(t) =
lTe3'
0 0
-2-10
-2 0 -3 0]T,
-10 0 3]T
cos4t sin4t 0 0]Q
-sin 4* cos4t 0 0]Te3t,
t cos At t sin At cos 4t sin 4t ] e3t,
—£sin4£ £cos4£ — sin4£ cos4£] e3t
sin3t
3 cos Ы — 3 sin 3t J 2t
0
sin3£
-cos3t
3sin3£4-3cos3*
0
-cos3t
3 cos 3*4-* sin 3t
C* - 10) cos 3* - Ct 4- 9) sin 3t. j e2t
sin3t
. t sin 3t
-* cos 3*4-3 sin 3*
Ct 4- 9) cos 3* 4- C£ - 10) sin 3t
— cos3t
—£ cos 3£
35. ari(t) = X2(t) = г?оA — e *); lim #i(£) = lim x%(t) — vo'
36. x\(t) = v0B - 2e~* - £e_t), x2(t) = v0B - 2e~* - te~l - 4*2е~*); lim a?i(t) = lim xi(t) = 2v0
л t—4IX t—+OO
Раздел 5.5
1. Ф(£) =
x(t)
3. #(*) =
x(t) = I
e* e3*
_ l
2
„3t
5e* + e:
-5e* 4- e3t
5cos4t
2 cos 4£ 4- 4 sin 4t
—5sin4£
4 cos 4* — 2sin4£
—5sin4t
4 cos At — 2 sin 4£
,2. •(«)'=
1 e44
2 >-2e4' '
,,, 1 Г 3 + 5e4M
XW~ i[6-10e«J
. 4. Ф«) = е«[; 1 + t"
x(t) = e
2t|"l+*'
Ответы к избранным задачам 1043
5. Ф(*) :
х(*) =
6. Ф(*):
Х(*) =
7. Ф(*) =
Х(*) =
9. eAt =
И. eAt =
13. eAt =
15. еА< =
17. eAt =
10 „At _
2eJ
2cos3^
-3cos3* + 3sin3*
3 cos 3* — sin 3*
3cos3* + 6sin3*
cos 4* — 2 sin 4*
2 cos 4*
cos 4* + sin 4*
sin 4*
3e* 2e~*
t
-2sin3*
3cos3* + 3sin3*
2 cos 4*+ 2 sin 4*
2 sin 4*
!■
V
2e
e" e
2e* 2e
12 + 12e* + 2e~*
-4 + 4e* + e_t
-10 + 8е* + 2е"*
,3t _ et
P.3* - -*
3e3t _ 2e2t
2e3* - 2e2*
4e3t - 3e*
3e3' - 3e<
5e2' - 4e*
2e2' - 2e*
-2e3t + 2e*
-e3t + 2e*
-3e3t + 3e2*
-2e3t + 3e2t
-4e3t + 4e*
-3e3t + 4e*
-10e2t + 10e*
—4e:
>2' + 5e*
2t 1
e4t .
„2t
21.
23.
25.
eAt
eAt
eAt
x(*)
e~* — e
4eiot + e5t
2e10t - 2e5*
-*
1-*
-*
1-*
0
e*b 5*er
0 e:
2e10t - 2e
e10'+4e5
5t
1 + *
*
1+*
*
0
02t
-t-P
_ „At
[*]
te2'l .
g» J.
27. eAt =
x(t) =
Ге<
2*e*
0 e*
L 0 0
eAt
"
5
6
C* + 2*2)e*
2*e*
2*
1
0
0
At __ „3t
30. eAt =
33. X(*) :
36. eAt =
3* + б*2
6*
1
*'■ 0.; ;'\
1
6*
9* + 18*2
12* + 54*2 + 36f3
cicosh* + C2sinh*
c\ sinh * + C2 cosh *
1 2* 3* + 4*2]
0 1 4*
0 0 1.
4* + б*2 + 4*3
3* + 6*2
2*
I
0
1
6*
9* + IS**
10.
12.
14.
16.
18.
20.
22.
24.
26.
28.
x(*) =
eAt =
eAt =
eAt =
eAt =
„At _
e
—e
0
-2t
-e"
0
,3t
-2t
—e* +e~:
-2 + 3e2' 3-3e2*
-2 + 2e2* 3 - 2e2*
-Зе*+4е2* 4е'-4е2*
-3e'+3e2t 4е'-3е2*
-8е* + 9e2t 6e* - 6e:
-12e* + 12e2*
-9e* + 10e2*
-6e* + 6e2t
9e* - 8e2t
15e* - 15e2t
10e* - 9e2*
: + e'
6t
>>At _
pAt _
x(t)
= eAt[
-At _
x(t) =
_ «At
-ел + eot
e5t + 4e15*
-2e5t + 2еш
1 + 6* 4*
-9* 1-6*
1 + 3* 0
5* + 18*2 1
3* 0
e7t 0 "
Tl*e7t e
5
10
e5t ,
10*e5t
B0*+.150*2 )e5t
4Q'
!£ + e°
+ e6'
-2e5t + 2e15t '
4e5t + ei5t
ert
-3*
7* - 18*2
l-3t
0
ebt
30*e5t
0
0
„bt
ё', х(*) = e/
0
0
1
6*
0
0
0
1
35.
, x(*) =
„At __
1
1
1
1
0At
k;50
60
4*e3'
„3t>
1044
Ответы к избранным задачам
37. eAt =
38.
39.
40.
„At
„At _
„At _
e2t 3e2t - 3e* 13e2t - A3 + 9*)e*
e"
0
3te*
e5t 4eiot _ 4e5t 16eiot _ A6 + 5ot)e5t
0
0
e*
0
0
0
e2t
0
0
0
piot
4e10t _ 4e5t
p5t
3te*
e*
0
0
4te2t
e2t
0
0
12e2t - A2 + 9t)e* E1 + Ш)е* - E1 - 36*)e2t ]
3e2t - 3e*
e2<
0
D* + 8t2)e2t
4*e2'
e2t
0
6e* - F - 9*)e2t
4e3t _ 4e2t
e2'
100e3t - A00 + 96* + 32*2)e2t
20e3t - B0 + 16*)e2t
4e3t _ 4e2t
л3*
Раздел 5.6
1. x(t) = f, y(t) = -§ 2. ac(t) = |A + 12*), y(t) = -1E + 4*)
3. s(t) = ^g(864e-*+4e6*-868+840t-504t2), 4. z(*) = ^(99e5t - 8e* - 7e*),
y(*) = ^(-864e-* + 3e6t 4- 861 - 882* + 378*2) y(t) = ^(99e5t 4- 48e~2t - 63e*)
5. x(t) = §(-12 - e-* - 7te~'), 6. s(t) = -^(91 4- Ш)е*,
y(t) = |(-6 - 7te"*) y(t) = з^B5 4- 16*)e*
7. x(t) = ^ C69e* + 166e~9t - 125 cos t - 105 sin t)9 у(t) = ^ C69e* - 249e"9t - 120 cos t - 150 sin t)
8. x(t) = | A7 cos t + 2 sin *), 9. ж(*) = | (sin 2t + 2tcos2t + t sin 2t),
y(t) = i C cos t + 5 sin t) ' у (*) = i* sin 2*
10. x(t) = j^e^cost-Gsint), 11. x(t) = |(l-4t + e4t),
y(t) = ^e'Ccos* + 2sin*) y(*) = |(-5 + 4t + e4t)
12. x(*) = t2, 13. x(t) = |A 4- 5*)e',
2/(*) = -*2 y(*) = -|te*
14. x(t) = |(-2 + 4t - e4' + 2*e4*), y(t) = ±i(-2 + e4t)
15. (a) Xl(t) = 200A - е~*/10), x2{t) = 400A 4- e~'/10 - 2е"*/20)
(b) xi(t) -+ 200 и x2(t) -> 400 при t -► +oo
(c) Резервуар 1: приблизительно 6 минут 56 секунд; резервуар 2: приблизительно 24 минуты 34 секунды
16. (a) Xl(t) = 600A - е-*/20), ж2(*) = 300A + е"*/10 - 2е"*/20)
(b) zi(t) -► 600 и ж2(*) -► 300 при t -» со
(c) Резервуар 1: приблизительно 8 минут 7 секунд; резервуар 2: приблизительно 17 минут 13 секунд
17. xi(t) = 102 - 95е~* - 7e5t,
ж2(*) = 96-95е-*-е5*
19. xi(t) = -70 - 60t + 16et 4- 54e2t,
x2(t) = 5 - 60t - 32e' + 27e2t
21. X1(t) = -e"* - 14e2' + 15e3',
x2(t) = -Ъе~г - 10e2* + 15e3'
23. xi(t) = 3 + Ш + 8*2,
ж2(*) = 5 + Ш + 24*2
25. xi(t) = -l + 8* + cost-8sin£,
x2(t) = -2 + 4£ + 2cos*-3sin*
27. xi(t) = 8t3+6t4,
x2(t) = 3t2-2t3+3t4
29. x\ (t) =t cos t — (In cos t)(sin t),
ж2 (t) = t sin £ + (In cos t) (cos £)
31. xi(t) = (9*2+4*3)e*,
x2(t) = 6t2e*,
x3(t) = 6te*
18. a;i«
x2(t
20. xi(t'
*2(t;
22. xi(t
x2(t]
24. xi(t;
ж2«
26. xi(t
x2(t
28. xi(t
x2(t
30. xi(t;
ж2(*;
32. xt(t
x2(i
x3(t]
= 68 - HOt - 75e~* + 7e5t,
= 74 - 80* - 75e-* + e5t
= 3e2* + 60te2* - 3e*,
= -6e2* + 30te2* + бе'
= -10e-* - 7*e-* + 10e3t - 5te3t,
= -15e~* - 35<е~* + 15e3* - 5te3*
= 2 + t + lnt,
= 5 + 3* h31nt
= 3cos* — 32 sin* + 17£cos£ + 4£sint,
= 5 cos t — 13 sin t 4- 6t cos t + bt sin t
= -7+14*-6t2+4£2ln*,
= -7 4- 9* - 3t2 4- lnt - 2*In* 4- 2t2 \nt
= i*2cos2t,
= |t2sin2t
= D4 + Ш)е* + (-44 4- 26t)e2*,
= 6e*4-(-6 + 6t)e2t,
= 2te2t
Ответы к избранным задачам 1045
33. xi(t) = Ш2 + 60t3 + 95t4 + 12t5,
ж2(*) = Ш2 + 55*3 + Ш4,
x3(t) = 15t2 + 20t3,
x4(t) = Ш2
Глава 6
Раздел 6.1
1. 6.1.13 2. 6.1.15
5. 6.1.11 6. 6.1.17
9. Равновесные решения x(i) = 0, ±2. Точка
равновесия @,0) в фазовой плоскости напоминает
центр, тогда как точки (±2,0) напоминают сед-
ловые точки.
^ 0
34. Xl(t) = At3 + D + 16t + 8t2)e2t,
x2(t)=3t2 + B + 4t)e2t,
x3(t) = B + 4t + 2t2)e2t,
X4(t) = (l+t)e2t
3. 6.1.18 4. 6.1.12
7. 6.1.14 8. 6.1.16
10, Равновесное решение x(t) = 0. Точка равновесия
@,0) в фазовой плоскости напоминает
спиральный сток (устойчивый фокус).
11. Равновесные решения x(t)=...', —27Г, —7г, 0,7г, 27Г, Фазовый портрет показывает, что точка равновесия
(п7г, 0) в фазовой плоскости представляет собой спиральный сток (устойчивый фокус), если п является
четным, но является седловой точкой, если п нечетно.
12. Равновесное решение x(t) = 0. Точка равновесия @^0) в фазовой плоскости напоминает спиральный
источник (неустойчивый фокус), с интегральными кривыми, происходящими от этого источника, причем
спирали направлены наружу к траектории замкнутой кривой.
ъ 0
13. Решение x(t) = xoe~2t, y(t) = yoe~2t. Начало координат представляет собой устойчивый дикритический
узел, подобный показанному на рис. 6.1.4.
1046 Ответы к избранным задачам
14. Решение x(i) = xoe2tf y(t) = yoe~2t.
Начало координат представляет собой неустойчивую
седловую точку.
^ 0
-5
15. Решение x(t) = xoe~2t, y(t) =* уое г. Начало
координат представляет собой устойчивый узел.
5|
* О
16. Решение x(t) = жое*, y(t) = yoe3t. Начало
координат представляет собой неустойчивый
вырожденный узел.
17. Решение х (£) ~. А соа £ ± В&щ %. # {t) ».=?
= В cog t — Amnt. Начало коррдинат
представляет собой устойчивый центр.
* 0
18. Решение x(t) = A cos 2t + В sin 2t, y(t) = — 2В cos 2t + 2A sin 2t. Начало коррдинат представляет собой
устойчивый центр.
19. Решение x(t) = Acos2i + Bsin2t, y(t) = Bcos2t — i4sin2t. Начало координат представляет собой
устойчивый центр.
Ответы к избранным задачам 1047
20. Решениеx(t) = e~2t(Acost + Bsint)fy(t) ~e-2t[(-2A+B)cost-.(A + 2B)sint].Начало
представляет собой устойчивый фокус.
^ 0
23. Начало координат и окружности х2 + у2 = С > 0; начало координат представляет собой устойчивый
центр.
24. Йачало координат и Гиперболы у2 — х2 '= С; 25. Начало координат и эллипсы х2 + 4у2 = С > 0;
началокоординат представляет собой неустойчи- начало координат представляет собой
устойчивую седловую точку. 4 вый центр.
^ 0
* 0
26. Начало координат и овалы формы х4 4- у4 = С > 0; начало координат представляет собой устойчивый
центр. i
4Г
^ Oh
-4h
f^1
V
f Y~~~
•[■r
v__
ч^..,;
i ■
"^Sa xl
~>|: 1
-^У. j
! 1 1
1048 Ответы к избранным задачам
Раздел 6.2
1. Асимптотически устойчивый узел
5[
^ 0
2. Неустойчивый вырожденный узел
3. Неустойчивая седловая точка
5|
4. Неустойчивая седловая точка
5. Асимптотически устойчивый узел
5|
^ 0
6. Неустойчивый узел
7. Неустойчивый фокус
5
^ Ор
Ответы к избранным задачам 1049
8. Асимптотически устойчивый фокус
9. Устойчивый, но не асимптотически устойчивый, 10. % Устойчивый, но не асимптотически устойчивый,
центр центр
11. Асимптотически устойчивый узел: B,1)
5(
^ 0
12. Неустойчивый вырожденный узел: B, —3)
1050 Ответы к избранным задачам
13. Неустойчивая седлОвая точка: B,2) 14» Неустойчивая седловая точка: C,4)
^ 0
15. Асимптотически устойчивый фокус: A,1)
* 0
16. Неустойчивый фокус: C,2)
17. Устойчивый центр: (§,— |)
^ 0
18. Устойчивый, но не асимптотически устойчивый,
центр: (-2, -1)
Ответы к избранным задачам 1051
19. Начало координат @,0) представляет собой
устойчивый узел. Кроме того, седловая точка
в @,67,0,40).
* 0
21. @,0) представляет собой неустойчивую седло-
вую точку. Кроме того, спиральный сток
(устойчивый фокус) в (-0,51, -2,12).
* 0
23. Начало координат @,0) представляет собой
спиральный сток (устойчивый фокус). Кроме того,
седловая точка в (—1,08, —0,68).
20. Начало координат @,0) представляет собой
неустойчивый узел. Кроме того, седловая точка
в (—1, — 1) и спиральный сток (устойчивый
фокус) в (-2,30,-1,70).
^ 0
-3
ri /. _. zL JlL
4 ^ \ т У
p4*\ / У ^
^^ Iff "*>^
-3
22. @,0) представляет собой неустойчивую седло-
вую точку. Кроме того, узлы-стоки в (±0,82, ±
±5,06) и узлы-источники в (±3,65, =f0,59).
24. Начало координат @,0) представляет собой
спиральный источник (неустойчивый фокус).
Никаких других точек равновесия не видно.
5
* 0
-ь
-' J/ / / /
<0* /// ///
Г / *Sfr£^
* • yv • у
i/yV * у 4k
Y * */< j
/ //v //v
/J/У //
$,/ у l/ J
У^У У^
F / y? ?
t/ / A ? A
у / >/?,
-^* * j/ $/ *\
^v^**/ 7 *
// JfJ/W i/ I
*JA ^ /\
У/х/ хУ/Г
1052 Ответы к избранным задачам
25. Из теоремы 2 следует только то, что начало координат @,0)> представляет собой устойчивый сток — либо
узел, либо фокус. Фазовый портрет для — 5 < ж, у < 5 показывает» что есть также седловая точщ @,74, —
—3,28) и спиральный сток (устойчивый фокус) B,47, —0,46). Начало координат напоминает узел-сток во
втором фазовом портрете для —0,2<х, у<0,2, на котором также видно вторую седловую точку @,12,0,07).
26. Из теоремы 2 следует только то, что начало координат @,0) представляет собой неустойчивый источник.
Кроме того, на фазовом портрете для — 3 < ж, у < 3 видны также седловые точки @,20,0,25) и (—0,23, —
-1,50) и узел-сток B,36,0,58).
27. Из теоремы 2 следует только то, что начало координат @,0) представляет собой центр или фокус, но
заключение об устойчивости или неустойчивости сделать нельзя. На фазовом портрете для — 2 < ж, у < 2
видны также седловые точки (—0,25, —0,51) и (—1,56,1,64), а также узел-сток (—1,07, —1,20). Начало
координат выглядит как центр на втором фазовом портрете для —0,6 < ж, у < 0,6.
Ответы к избранным задачам 1053
28. Из теоремы 2 следует только то, что начало ко- 29. Есть седловая точка в начале координат @,0).
ординат @,0) представляет собой центр или фо- Характер другой точки равновесия A,1) неопре-
кус, но не устанавливается его устойчивость (хо- делен, но она напоминает центр на фазовом порт-
тя на фазовом портрете оно напоминает вероят- рете.
ный центр). На фазовом портрете для —0,25 <
< х < 0,25, — 1 < у < 1 показаны также седловые 2 \
точки @,13,0,63) и (-0,12, -0,47).
ъ 0
^ 0
30. Есть седловая точка A,1) и спиральный сток 31. Есть седловая точка A,1) и спиральный сток
(устойчивый фокус) (—1,1). (устойчивый фокус) (—1,-1).
^ 0
^ 0
32. Есть седловая точка в B,1) и спиральный сток 37. Обратите внимание, что дифференциальное урав-
(устойчивый фокус) (—2,-1). нение однородно.
3
^ 0
-3
Х/4Ж4
S i/У 4/4
l/j/l/yV 4/
4ч£0^^
1 1
\ \\Х nsj
\ \\xXl
-3
1054 Ответы к избранным задачам
Раздел 6.3
1. Линеаризация в начале координат @,0): х'
= 200ж, у' = —150$/; фазовый портрет:
Линеаризация в G5,50): и' = -; ЗОЩ, V '
= 100и; фазовый портрет:
^ 0
> 0
5. Характеристическое уравнение имеет вид А2 + 45 A -f 126 = 0.
7. Характеристическое уравнение имеет вид
(-24 - АJ - 2 • A8J =s 0. Фазовый портрет:
Фазовый портрет для нелинейной системы в
задачах 4-7:
5
-5
т/т / ?/?
/Тут/ л
NT /г ft
/^/тА/т'
<А/4 ///
-5
.A5,0)
9. Характеристическое уравнение имеет вид А2 +58А — 120 = 0.
10. Характеристическое уравнение имеет вид (А +
+ 36) (А + 18) - 576 = 0. Фазовый портрет:
> 0
-5L
1 ' ' Jb*"
£_ 1_
Фазовый портрет для нелинейной системы в
задачах 8-10:
20
@,14)^
15
10
5
0
h ;
N
L i
k !
J гы У \S \£/& is is
1 s^'y4^^ *^J^*' *"" *"
\ / J^j^S^^^ js^^/0r*^' ^
\ 1 J^^^^j!!!^^**1^'^^^ *"=
(jj^Z^^^ ^-Л-^V «- «- «-
1 1 ), м .,, 1 ,1 1 м\ .
A2,6)
B0,0)
-5
0
и
10 15 20
x
Ответы к избранным задачам 1055
12. Характеристическое уравнение имеет вид А2 + 2А — 15 = 0.
13. .Характеристическое уравнение имеет вид Л2 4- 15. Характеристическое уравнение имеет вид А2 +
+ 2А + 6 = 0. Фазовый портрет: + 2А - 24 = 0.
5
* 0
-5
1 ф f^
Xi Xi ^>=*~=*
17. Характеристическое уравнение имеет вид А2 —
— 4А 4- 6 =з 0, Фазовый портрет:
-5*
19. Характеристическое уравнение имеет вид А2
4- Ю ?= 0. Фазовый портрет:
> 0
21. Характеристическое уравнение имеет вид
А2 - А - 6 = 0.
22. Характеристическое уравнение имеет вид
А2 — 5А + 10 = 0. Фазовый портрет:
> 0
24. Характеристическое уравнение имеет вид А2 + 5А — 14 = 0.
1056
Ответы к избранным задачам
25. Характеристическое уравнение имеет вид Л2 + 5Л + 10 = 0. Фазовый портрет:
5[
> 0
26. Естественный прирост конкурирующих популяций.
Точки равновесия: узел-источник @,0) и седловая точка C,2)
Отличные от нуля численности сосуществующих популяций x(t) = 3, y(t) = 2
27. Естественно уменьшающиеся сотрудничающие популяции.
Точки равновесия: узел-сток @,0) и седловая точка C, 2)
Отличные от нуля численности сосуществующих популяций x(i) = 3, y(t) = 2
C,2)
28. Естественно уменьшающаяся популяция хищника, естественно возрастающая численность популяции
жертвы (добычи).
Точки равновесия: седловая точка @,0) и очевидный устойчивый центр D,8).
Отличные от нуля численности сосуществующих популяций x(t) = 4,y(t) =8
Ответы к избранным задачам 1057
29. Логистическая и естественно растущая конкурирующие популяции.
Точки равновесия: узел-источник @,0), узел-сток C,0) и седловая точка B,2)
Отличные от нуля численности сосуществующих популяций x(t) = 2, y(t) = 2
30. Логистическая и естественно уменьшающаяся популяции в сотрудничестве.
Точки равновесия: седловая точка @,0), узел-сток C,0) и седловая точка E,4)
Отличные от нуля численности сосуществующих популяций x(t) = 5, y(t) = 4
31. Логистическая популяция добычи, естественно уменьшающаяся численность популяции хищника.
Точки равновесия: седловые точки @,0) и C,0), спиральный сток (устойчивый фокус) B,4)
Отличные от нуля численности сосуществующих популяций x(t) = 2, y{t) = 4
32. Логистические популяции в сотрудничестве.
Точки равновесия: узел-источник @,0), седловые точки A0,0) и @,20), узел-сток C0,60)
Отличные от нуля численности сосуществующих популяций x(t) = 30, y(t) = 60
33. Логистические популяции жертвы (добычи) и хищника.
Точки равновесия: узел-источник @,0), седловые точки C0,0) и @,20), узел-сток D,22)
Отличные от нуля численности сосуществующих популяций x(i) = 4, y(t) = 22
1Q58
Ответы к избранным задачам
4б
D,22).
20
@,20)'
0
/|
J
Т
' I -si*, |>i» "^-l N*"
,4.14. i >Да!
It I т It I t
/ */ */ * / *!
@,0) , ;
jxu ^/yv 4
**** *~ *"* *H
•П T *04i|4 «J
A5,0). 1
10
20
34. ^Логистические популяции жертвы (добычи) и хищника.
Точки равновесия: узел-источник @,0), седловые точки A5,0) и @,5), спиральный сток (устойчивый
фокус) A0,10)
Отличные от нуля численности сосуществующих популяций x(t) = 10, y(t) = 10
Раздел 6.4
1. Собственные значение: -^2, —3; устойчивый узел 2i Собственные значения: 1, 3; неустойчивый узел
5|
?s 0 Г
-5[
ш
_| 1 *«-■—'^
л
J^zzz
lJ
-10
о
х
10
3. Собственные значения: —3, 5; неустойчивая сед-
ловая точка ,
ъ 0
4. Собственные значения: — 1 ± 2г; устойчивый фо-
,< кус
4
Q
-4
&—"*^ ' ;
1 1 if /ял
■Л. \. N» ^
ritt,t tl
у//яг ^ ^
Ш т т
- А
Ответы к избранным задачам 1059
5. Точки равновесия: @, П7г), где п — целое
число; неустойчивая седловая точка, если п является
четным, устойчивый фокус, если п нечетное
7. Точки равновесия: (п7г, П7г), где п — целое чис-
, ло; неустойчивая седловая точка, если п является
четным, устойчивый фокус, если п нечетное
Зя
2я
к
ъ О
-я
-2я
-Зтс
-Зя -2тс -я 0 я 2я Зя
X
6. Точки равновесия: (п, 0), где п — целое число;
неустойчивая седловая точка, если п является
четным, устойчивый фокус, если п нечетное
8. Точки равновесия: (п7г,0), где п — целое
число; неустойчивый узел, если п является четным,
неустойчивая седловая точка, если п нечетное
9. Если п нечетное, то (п7г, 0) представляет собой неустойчивую седловую точку.
10. Если п нечетное,-то (п7г, 0) — устойчивый узел.
11. (п7г, 0) представляет собой устойчивый фокус.
12. Неустойчивые седловые точки B,0) и (—2,0), устойчивый центр в начале координат @,0)
13. Неустойчивке седловые точки B,0) и (—2,0), устойчивый фокус в начале координат @,0)
14. Устойчивые центры B,0) и (—2,0), неустойчивая седловая точка в начале координат @,0)
15. Устойчивый центр в начале координат @,0) и неустойчивая седловая точка D,0)
16. Устойчивые центры B,0), @,0) и (—2,0), неустойчивые седловые точки A,0) и (—1,0)
1060 Ответы к избранным задачам
17. @,0) — спиральный сток (устойчивый фокус).
-5
0
х
18. @,0) — спиральный сток (устойчивый фокус);
точки (±2,0) — седловые точки.
19. @,0) — спиральный сток (устойчивый фокус).
-10
20. (п7г, 0) — спиральный сток (устойчивый фокус),
если п является четным, седловая точка, если п
нечетное.
Глава 7
Раздел 7.1
1. 1/s2, а > 0
3. e/(s - 3), s > 3
5. l/(s2 - 1), s > 1
7. A - e"s)/s, s > 0
?. (l-e-s-se-s)/s2, s>0
11. i^s-3/2+3s-2, s>0
13. s-2(s-3)-1, s>3
15. s-1-hs(s2-25)-1, s>5
17. cos2 2t = |A + cos4t); § [s + s/(s2 + 16)], s > 0
18. 3/(s2 + 36), s > 0 19. s-1 + 3s~2 + 6s-3 + 6s, s > 0
20. l/(s - lJ, s > 1 21. (s2 - 4)/(s2 + 4J, s > 0
2. 2/s3, s > 0
4. s/(s2 + 1), s > 0
6. ±[l/s-s/(s2 + 4)], s>0
8. (e~s - e~2s)/s, s > 0
10. (s-l + e-s)/s2, s>0
12. D5tt - 192s3/2)/(8s7/2), s>0
14. 3v^F/Ds5/2) + 1/E + 10), s > 0
16. (s + 2)/(s2+4), s>o
22. l[s/(s2-36)-s-1]
24. 2у/ф
26. et
28. 3cos2* + |sin2t
23.
25. l - |t3/27r-1/2
27. 3e4t
29. |sin3t-3cos3t
Ответы к избранным задачам 1061
30. - cosh 2t - | sinh 2t 31. f sinh bt - 10 cosh Ы
$2. 2u(t-3)
37. /(£) = 1 — u(t — а). Ваш рисунок должен показать, что график / проходит через точку (а, 0), но не через
точку (а, 1).
38. f(t) = u(t — а) — u(t — b). Ваш рисунок должен показать, что график / проходит через точки (а, 1) и (Ь, 0),
но не через точки (а, 0) и (Ь, 1).
39. На рис. 7.2.8 показан график единичной ступенчатой функции.
Раздел 7.2
1. x(t) = 5 cos 2t 2. x(t) = 3 cos 3t + § sin 3t
3. s(i) = §(e2' - e"*) 4. x(t) = iGe* - 3e~5t)
5. ж(£) = | B sin t - sin 2t) 6. x(t) = | (cos t - cos 2t)
7. s(t) = |(9cost - cos3t) 8. x(t) = |A - cos3t)
9. x(t) = |B - &Г* + e~3t) 10. x(*) = \{2t - 3 + 12e~* - 9et)
11. ac(t) = 1, 12. x(t) = |(e2t - e"* - 3te"*),
v(*) = y(t) = \{e2t - e~l + 6te"*)
13. z(*)= - B/л/з) sinh (t/y/з), 14. x(t) = -|Bt - 3sin2t),
y(t) = cosh (t/VS) + (i/VS) sinh (t/V5) **> = ~^2*+ 3sin2*)
15. x(t) = |B + e*/2 [coe(rt/2) + r sin(rt/2)]),
y(t) = ^- B8 - 9e* + 2e~3*/2 [coe(rt/2) + 4r sin(rt/2)]) , где г = у/3
16. x(t) = cost -f sint, y(£) = e* — cost, z(t) = —2sint
17. f(t) = ±(e3' - 1) 18. f(t) = f(l - e<)
19. f(t) = \ A - cos 2t) = \ sin2 t 20. /(*) = | F sin 3t - cos 3* + 1)
21. f(t) = t - sin* 22. /(t) = |(-1 + cosh3t)
23. f(t) = -t + sinh* 24. /(*) = |(e-2t - 2e"* + 1)
Раздел 7.3
1. 24/(s-ttM 2. |0FE + 4)-5/2
3. 3tt/[(s + 2J + 9тг2] 4. >/2 Bs + 5)/Ds2 + 4s + 17)
5. §e2t 6. (t - t2)e-*
7. tet 8. e-2*cost
9. e3tCcos4t+f sin4t) 10. ^e2'/3 (8cos ft - 5sin |t)
11. ± sinh 2* 12. 2 + 3e3t
13. 3e~2t - 5e~5t 14. 2 + e2t - 3e"*
15. ^ (e5* - 1 - 5t) 16. ^ [e2* E* - 2) + e~3t E* + 2) ]
17. ^(sinh 2t - sin2t) 18. e4t (l + 12* + 24t2 + ^t3)
19. | B cos 2t + 2 sin 2* - 2 cos t - sin *) 20. ^ [e2t B* - 1) + et B* + 1) ]
21. ±e-tEsmt-3tcost-2tsmt) 22. ^e*/2[Dt + 8) cost + D - 3t)sint]
27. £e-3t(8cos4t + 9sin4t) 28. |A - 2e2t + e4t)
29. |(-6t + 3sinh2t) 30. jofie-* - e~2tBcos2t + sin 2*)]
31. ^Fe2t - 5 - et) 32. \ (cosh t + cos t)
33. a;(t) = r(coshrtsinrt — sinh rt cos rt), где г = l/\/2
34. \ sin 2t + | sin 3t 35. ^ (sin 2t - 2t cos 2t)
36. ^[2e2t + A0t-2)cost-E* + 14)sint] 37. ^[Et - 1)е"* + et(cos3t + 32sin3t)]
38. 5Y0 et D89 cos 3* + 307 sin 3t) + yTo G cos 2t + 6 sin 2t)
1062 Ответы к избранным задачам
39.
teat
|(е3<-1)
^(sin3t-3tcos3t)
|(sin2t + 2tcos2t)
^Ce3t -3cost + sin£)
2.
4.
6;
8.
10.
12.
14.
16.
18.
Раздел 7.4
1 it2
1. 2 Г
3. I (sin £ — £ cos t)
5.
7.
9.
11.
13.
15. 6s/(s2+9J,s>0
17. (s2 - 4s - 5)/(s2 - 4s + 13J, s > 0
19. ±7r-arctgs = arctg(l/s), s > t> 20.
21. Ins - ln(s - 3), s > 3 22.
23. -Bsinh2i)/t 24.
25. (e-2t + ea*-2cost)/t ' 26.
27. 2A-cos t)/t 28.
29. (s + l)X'(s) + 4X(s) = 0; s(t) = С&е-*9.С Ф 0
30. X(s) = A/(s + 3K; rc(t) = Ct2e"^, С ^ 0
31. (s - 2)X'(s) + 3X(s) = 0; x(t) = Ct2e2\ СфО
32. (s2 + 2s)X'(s) + Ds + 4)X(s) = 0; x(t) = C(l - * -
33. (s2 + l)X'(s) + 4sX(s) = 0; z(t) = C(sint - tcost),
34. x(t) = Ce_2t(sin3t - 3tcos3t), С ф О
Раздел 7.5
1. f(t) = u(t - 3) • (t - 3) 2.
Л0
(eat - at - l)/a2
2(£-sin£)
(eat,__ ebt)/(a •- 6)
±(l-cos2*)
(kt-sinkt)/k3
i[l-e-2t(cost + 2sint)]
| (cos t — cos 2t)
Bs3;~24s)/(s2+4K,s>0
2Cs2 + 6s + 7)
(s + lJ(s2+2s + 5J,S>
±ln(s2+4) -Ins, s > 0
ln(s + 1) - ln(s - 1), s > 1
2(cos2t- cos t)/t
(e-2tsin3t)/t
| (t sin t — t2 cos t)
et - te~2% СфО
СфО
f(t) = (t - l)u(t - 1) - (t - 3)u(t - 3)
Л0
Ответы к избранным задачам 1063
3. f(t) = u(t - 1) • е-2**)
ДО
4. f(t) = et-1u(t - 1) - е2е*-2гг(* - 2)
ДО
-5Ь
-1(Н
1
5. f(t) = u(t — 7г) • sin(£ — 7г) = ■■— u(t — 7г) sin t 6. /(t) = w(t — 1) • cos n(t — 1) = —u(t — 1) cos nt
до до
7. /(*) = sin t- u(t - 2тг) sin(* - 2тг) = [1 - u(t -
— 27r)]sint
8. f(t) = cos 7rt - <u(t-2) cos 7r(t-2) = [l-ti(t-
— 2)] cos 7г£
9. /(*) = cosnt+u(t-3)cosn(t-3) = [l-u(t-
— 3)] cos irt
10. /(*) = 2u(t - 7r)cos2(t - тг) - 2it(t
- 27r)cos2(t - 27г) = 2[u(t - n) - u(t
- 2n)] cos 2i
11. /(t) = 2[1 - ii3(*)]; F(s) = 2A - es)/s 12. F(«) = (e~* - e~4e)/s
1064 Ответы к избранным задачам
13. F(s) = (l-e-2™)/(s2 + l)
15. F(s) = (l+e-37rs)/(s2 + l)
17. F(s) = ir(e-2s + es)/(s2 + тг2)
19. F(s) = e-s(s-1-hs~2)
21. F(s) = A - 2e"s + es)/s2
31. a;(t) = I [l - ti(t - тг)] sin2t
x(t)
14. F(s) = s(l - e-2s)/(s2 + тг2)
16. F(s) = 2(e"
p-2tts
)/(*2+4)
18. F(s) = 27r(e-3s + es)/Ds2 + тг2)
20. F(s) = A - e"s)/s2
28. F(s) = A - e"as - ase"as)/[s2(l - eas)]
32. x(t) = g(t)-u(t-
■4е~* +e~4t).
x(t)
-2)<K*-2), где <?(*)= ^C-
0.2
0.1
33. x(t) = | [1 - u(t - 2тг)] (sint - | sin3t)
x(t)
-0.1
34. *(t) = g(t) - u(t - l)[g(t - 1) + fc(* - 1)], где
g(t) = t — sint и h(t) = 1 — cos t.
-0.5
35. x(t) = \ { -1 + t + (t + l)et + w(t - 2) [l - t + Ct - 5)e-2(*-2)] }
40
/
A
/ \
/
37. i(t) = [1 - u(t - 2тг)] sin lOOt
36. i(t) = e0' - ti(t - l)e-1°(*-1)
38. i(t) = Щ[1 - (и - tt)](cos lOt - cos 100*)
39. i(t) = i [(i _ e-50*J - u(t - 1)A + 9Se~5°(t-1) - ЭЭе0^*-1)]
40. i(t) = ±[(l-e
50te"
*)-*(*- lXl.-e-50**-1) -h2450te-5°(*-1))]
Ответы к избранным задачам 1065
41. x(t) = 2|sint|sint
42. x(t) = g(t) + 2 ^ (-l)ntx(t - П7г)р(« - гиг),
П=1 !
где p(t) = 1 - |e_tCcos3t + sin3t)
*(f) "
-2
A.
I * .1
4fc" \ tif '
У
Раздел 7.6
1. x(t) = |sin2t
2. ж(£) = |[1 + u(t - тг)] sin 2*
-11
2
Л А "
Y\ \] \
\/ V V
x(t) = i[l-e-2t-2te-2t] +
+ и(г-2)(*-2)е-2('-2)
0.25
4. x(t) = -2 + t + 2e~* + 3te_t
L5
1
0.5
1
.^^'■"'■*'"^
2 3
1066 Ответы к избранным задачам
5. x(t) = 2u(t - 7r)e~(<t-^ sin(t - тг)
6. x(t) = §(t - 2u(t - Зтг)) sin3t
x(t) = [2 - e2*u{t - тг)+
+e47rtx(t-27r)]e-2tsint
-2h
8. x(t) = B 4- 5t)e-* - u(t - 2)(t - 2)е"(^2)
re-3rf(t - t) dr
) -
t
(e-2rsin2r)/(t-r)dr
9. x(t) = ±(sin2r)/(t - r)dr 10. x(t) =
Jo
f*
11. x(t) = (er sinh r)f(t - r)dr 12. s(t) =
JO vu
13. (a) mxe(t) = p[t2 — tx€(t)(t — eJ]/Be); (b) Если t > e, то mxe{t) = pBet — е2)/Bб), и, следовательно,
miCc(t) —► pt при € —> 0; (с) mv = {mx)' = (ptO =0.
15. Преобразование каждой из двух данных задач Коши (задач с начальными условиями) приводит к (ms2 +
+ k)X(s) — mvQ = ро.
17. (b) i(t) = e-10°(t-1)txi(t) - e-10°(*-2)u2(t). Если t > 2, то i(t) = -(e100 - i)e10°A-*) < 0.
oo
19. i(t) = Y1U^~ П7Г/10)sin 10t
n=0
18. i(t) = [1 - u(t - тг)] sin lOt
oo
20. i(t) = ^ (-!)П^(* ~ П7Г/5) sin lOt
n=0
21. i(t) = Y^u(t- птг/10)е3п*е-30* sint
22. a;(t) = ]|П u(t - 2птг) sint
n=0
-0.1
Ответы к избранным задачам 1067
Глава 8
Раздел 8.1
/ X2 X3 \
1. у(х) = со ( 1 + х + -— + —- Н J = соех; р = +оо
- , ч Л 4х 42х2 43х3 44х4 \
* , ч Л Зх (ЗхJ (ЗхK (ЗхL \ - /а
3. y(x)^c0^l-T + ^^y- + ^-...J=coe-^/2;p=+oo
= сое4ж; р = оо
/ X2 X4 X6 \ 2
4. J/(a;)=C0^l-_ + _-_+...<j =Coe- ;р =
(X3 X6 X9 \
1 + Т+ 2I32 + 3!33 + '"J =соехР(|ж3)^=+°°
7. y(s) = соA + 2х + 4х2 + 8х3 + • • •) = —^—; р = \
1 — 2х
о , ч Л х х2 х3 5х4 \
9. з/(х) = соA + 2х + Зх2 + 4х3 + • • • ) = ,л С° ,0; Р = 1
A - хJ
10.^)=co(l-f + ^ + ^ + fg + ...)=co(l-xK/2;p=l
_ , ч / х2 х4 х6 ■ \ / х3 х5 х7 \ ,_
11. у(х) =соA + — -h — + — Ч J+cil^+^ + Tf + TJ-H I = co coshx + a smhx;
р = +оо
^ , ч Л BхJ BхL BхN \
12. „(х) = со A + i-L + 4l "+Г» + '*V +
+ I ({2Х) + ^- + Щ*~ + ^ + ••') = ^ocosh2x+ ^sinh2x;p = оо
13. y(x) = co^l-^ + -jp--gj- + .»|+1
ci / (ЗхK (ЗхN (ЗжO \ 0 , . '"
+ — Зх - ^—J— + ±--f- - -Ц-f- + •.. = со cos3x + \ci sin3x;/> ±= +00
3 \ 31 5! 7! / 6
ЛА < 4 Л ^ X4 X6 \ , ^ ( X3 X5 X7 \
14. y(x) = x + col 1^ —+ ^^ —+ •• J 4-(ci -1) (x~ —+ —- ^-+---J,= x + cocosx +
+ (ci — 1) sinx; p = 00
15. (n + l)cn = 0 для всех n ^ 0, так что cn = 0 для всех п 7Z 0.
16. 2ncn = Cn для всех n ^ 0, так что cn = 0 для всех п ^ 0.
17. со = ci = 0 и Cn+i = —ncn для n ^ 1, поэтому cn = 0 для всех п ^ 0.
18. Cn = 0 для всех n ^ 0
3
19. (n + l)(n + 2)cn+2 = -4cn; y(x) =,-
20. (n + l)(n + 2)cn+2 = 4cn; y(s) = 2
B^ B^ _ B^
v ' 3! 5! 7!
= - sin 2x
2
BxJ BxL Bx)<*
2! 4! 6!
= 2 cosh 2x
' X X Ж
21. n(n + l)cn+i = 2ncn - cn-i; y(x) = x +x2+ — + — + — H = хеж
22. n{n + l)cn+i =■, -ncn + 2cn~ 1; 2/ = е~2ж
23. Поскольку со = ci = 0 и (n2 — n + l)cn + (n — l)cn-i = 0 для n ^ 2, cn = 0 для всех n ^ 0
1068 Ответы к избранным задачам
Раздел 8.2
оо оо ,
1. cn+2=cn;j,(:c) = co£x2" + c1£x2'l+1 = ^±^;P= 1
1 — Т2
n=0 n=0 X Ж
2. сп+2 = -|сп;р = 2;2/(х) = со^ —^ + ci X —V
on Z—/ on
n=0 n=0
3. (n+ 2)^+2 = -^;^) = cd X) n,2n + ClX, Bп + 1У ; Р = +°°
n=0 n=0 ^ '*
oo
8. 2(n + l)(n + 2)cn+2 = (n - 4)(n + 4)cn;
y(x) = co(l - 4x2 + 2ж4) + ci
4. (n + 2)cn+2 = -(n + 4)cn; p = 1; y(x) = cq £ (-l)n(n + l)x2n + ±ci X (~l)nBn + 3)x2n+1
n=0 n=0
~ x2n+1
5. 3(n + 2)cn+2 = ncn; p = y/S; y(x) = co+ciV ——
^o Bn + xKn
6. (n + l)(n + 2)cn+2 = (n - 3)(n - 4)cn; p = oo; y(x) = co(l + 6ж2 + x4) + ci(x + x3)
7. 3(n + l)(n + 2)cn+2 = (n - 4Jcn;
Л 8я2 8я4\ / ж3 ж5 Л^, (-1)пBп-5)!!ж2п+Л
^^i1"^)^!'"^^ Bn+l)!3n J
(n + 4)cn;
/ _ 5*3 7^5 ~ Bп-5)!!Bп + 3)!!ж2п+Л
^ 4 + 32 +^3 Bп + 1)!2~ )
9. (п + 1)(п + 2)сп+2 = (п + 3)(п + 4)ста; р = 1;
оо оо
2/A) = со ^ (п + 1)Bп + I)*2" + £!£(„ + l)Bn + 3)x2n+1
п=0 п=0
10. 3(п + 1)(п + 2)сп+2 = -(п - 4)сп;
/ 2я2 я4\ < ( х3 х5 ~ (_l)nBn-5)!hr2n+1\
^^A + T + s)+ft(fn + io+8S Рм^ J
11. 5(п + 1)(п + 2)сп+2 = 2(п - 5)сп;
/ 4ж3 4я5\ / 2 ж4 ж6 _^ Bп-7)!!2пя2п\
у(х) - а [х Н 1 + со 1 - х2 Н Н + 15 > - —-^-
V 15 375/ \ 10 750 ^4 Bn)!5n J
/ ^ х3п \ оо^ ж3п+1
12. Ъ = 0Лп + 2)сп+3=сТ1;У(х) = сои+^ 5 \+С1^-^
\ n=l v ' / п=0
13. с2 = 0; (п + 3)сп+3 = -сп; у(х) = с0 X J + d X ^..-ГЗп+Ц
п=0 ' п=0 ^ ' /
14. с2 = 0; (п + 2)(п 4- 3)сп+3 = -сп;
^ (-l)":r3n \ ^ (-1)"жЗп+1
^3-.n!.2.5...Cn-l)L;+Cl^03n.n!.1.4...Cn-
+ 3)(n + 4)cn+4 = -cn;
^ 4™ • n! • 3 • 7 • • • Dn - 1) ) + Cl ^0 4n • n! • 5 • 9 • • • Dn + :
15. c2 = сз = 0; (n + 3)(n H- 4)cn+4 = -cn;
2/(ж) = со I 1 +
1)
16. 2/(ж) = ж 17. з/(ж) = 1 Н- х2
J^ (—1)п(ж — 1Jп
18. у(х) = 2 > — —; сходится для всех х
^—' п\2п
п=0
оо
19. у(х) = | X Bп + 3)(ж - lJn+1; сходится, если 0 < ж < 2
Ответы к избранным задачам 1069
20. у(х) = 2 — 6(х — ЗJ; сходится для всех х 21. у(х) = 1 4- 4(ж 4- 2J; сходится для всех х
22. у(х) = 2х + 6
23. 2с2 + со = 0; (п 4- 1)(п 4- 2)сп+2 4- cn 4- cn_i = 0 для п ^ 1; 2/1 (я) = 1 — -\ ; 2/2 0*0 =
Z О
_ X3 X4
~ Х ~ ~6~ ~ 12 + " '
/у.3 /у.5 /у.6 /у.3 /у.4 ^5
А . у v ^ «*/ «Д/ «*/ у ч **' «^ «А/
24. и(ж) = 1+_ + _ + _+...;и(ж)=я!+_ + _ + _+...
25. С2 = сз = 0, (п 4- 3)(п 4- 4)сп+4 + (п + l)cn+i 4- сп = 0 для п ^ 0; 2/1(ж) = 1 - —- 4- —— 4 ;
12 12о
ж4 ж5
У V У 12 20
-, , v ( X6 X9 \ ( X7 X10 \
26. ,(*) = co(i-- + - + ...)+c1 (*-- + - + -]
27. у(ж) = 1-ж-у4-у
ж* ж* 29ж6 13ж7 143ж8
24 + 30 + 720 + 630 40320
4-.-.-; 2/@,5) и 0,4156
*« / х / Я2 Я3 \ / X3 X4 \
28. 2/(,)=co(l-Y + T4-..-J4-Cl^-T4-- + -.j
720
29. 2/1W = 1 - -х2 + х6 Н ; 2/2(z) = ж х3
х5 4- • •
60
33. На следующем рисунке показаны отделенные ну- 34. Чтобы получить приведенный ниже рисунок, мы
ли 4-го и 5-го многочленов Эрмита.
использовали п = 40 членов в каждой сумме. Но
при п = 50 мы получаем то же самое
изображение, что и на рис. 8.2.3 в тексте.
Раздел 8.3
1. Обыкновенная точка
3. Иррегулярная (нерегулярная) особая точка
5. Регулярная особая точка; п. = 0, гг = — 1
7. Регулярная особая точка; г = — 3, — 3
9. Регулярная особая точка х = 1
11. Регулярные особые точки х = 1, — 1
13. Регулярные особые точки х = 2, — 2
14. Иррегулярная (нерегулярная) особая точкав х = 3, — 3
15. Регулярная особая точка х = 2
16. Иррегулярная (нерегулярная) особая точка ж = 0, регулярная особая точка х = 1
2. Обыкновенная точка
4, Иррегулярная (нерегулярная) особая точка
6. Регулярная особая точка; г\ = 1, гг = — 2
8. Регулярная особая точка; г = |, — 3
10. Регулярная особая точка х = 1
12. Иррегулярная (нерегулярная) особая точка # = 2
1070 Ответы к избранным задачам
17. г/1 (х
2/2 (х\
19. yi(x
У2(х\
21. ух(ж
23. 2/i (ж
2/2 0е
24. 2/i (ж
2/2 (ж
25. J/1 (ж'
02 О*
27. J/1 (ж
= cos v^,
= sin y/x
"•"(■«S^fW).
п\ Bп - 3)!!
18. 2/i (х) =
У2(х) =
20. ух (ж) =
У2(X) *=
Ex
л nfBn
n=0
B71 + 1)!!*
-1/2 V^ x
^0n!Bn-l)!!
^ (-l)n2nx^
^0n!.4-7;.>Cn^)'
rV3
50n!.2.5.-.Cn-l)
/ ~ ж2п \
^-1/2("+En!.1.5x2"Dn_3)) »(*>«<
(°° ~2n \
1+ V - 1
^ 2n • n! • 19 • 31 • • • A2n + 7) у *
\ ^12».п!.б.17.-Ч12п-7)У
V ^r'12"•n!•7•13•.•Fn + l):^,
^n!-9-13---Dn + 5yJ
1 A I f> С-1)"*2" j
= 1 + E
(-1)пя2
^ 2n • n! • 5 • 11 • • • Fn - 1)
; i/a у* (-1) * = xx/ae—/a
Si n!'2n
-i+r
(-l)wsn
£i<2»-l)l!
= — cos3x-, у2\х) = — sin За;
x x
26. 2/1 (ж) =
j/2 (x)^
28. yi(x) =
rV2
S^r^?1?^).
14. V 2nx2yt
i=i3-7^.Dn^l)
— cosh 2x, 2/2 (x) = — sinh 2a;
Ответы к избранным задачам 1071
29. ух (х) = - cos -, у2 (х) ь= - sin >
-0.5 L
31; sifi(aj) == ж1/2 dosha;, yi(x) = ж1/2 sinha;
32. yi W = i+y, уз (я?) - х^1/2 f 1 2
/ 5ж 15ж2 5ж3 \
20 224 + 24192
4
+ •
Раздел 8.4
п=1 ч '
1 / Ж2 Х3\ ^ Х"
2. 2/1 (*) = -2 1Ч.я: + — + — Uyiix) = 1 + 24 ]Г
1 / д^2 ^.9#3\ , ч ^ (-l)n3nxn
з.ы«)-^A-а.+ —-^^-i + MgL;^
За; . 9х2 _ Эж3 27s4 \
4. yi(x):
?(-
а;° V 5 50 250 5000/ * v ' ^ (п5)! • 5я
' п=1 ч '
,!&(*) = 1 + 120]Г
(-1)пЗпхп
5. yi(*) = l +
Зх х2 х3 /ч б/ ~ (n + l>n\
6.yi(x) = ^fl4-gf BП + 5)!ЬП>1
2/1W х ^ ^ 5 ^ n! (n + 4I2» ^
г злы = jl<2 - fa+9^), W(«) = x:( (;+2),
1072
Ответы к избранным задачам
8. 2/i(х) = 3 + 2х + х2, У2(х) =
9. 2/i(z) = l+^ +
(I-*J
^6
+ ■
+ •
22 22 • 42 ж2 • 42 • б2
2 5ж4 23ж6
2/2 (ж) = t/i (ж) • In ж
* V ' *1V ' V 4 128 3456 У
,л / ч Л ^ *4 Я6 >\
10. У1(я:)=Я:^1-_ + _^--__г + ...J,
/ ч л *2 5*4 2з*6 >\
2/2(x) = 2/lW^lnx+T + —+ ^^+...J
11. уф) = х2A-2х+Ц--Ц- + ..\
, ч Л о И*2 49ж3 \
2/2 (ж) = 2/1W • ( Ьж + Зх Н h -— Н J
2 Л * 3*2 ж3 ж4 \
12. yi(x) =х2 1 + + ,
У w V 2 20 30 168 /
13. У1(х) = хг (l -2х + 2х2 -^- + -Л,
/ ч / , 1 2 4ж \
»W = **(*) • ^2 In* - — - - + — + • • • J
14. 2/i(x) = x2fl-~ + —- — + — -•-Л,
* V ' V 5 10 105 336 J
^=у^ху(-^ + тЬ + ш
13
ЮОж2 1750ж
2/2 (х) не содержит логарифмического члена.
+ •
•>
4.
J-1/2W
-0.5
5. J4(x) = -l(x2-24)J0(x) + -^F-x2)Ji(x)
хл хй
12. Следующий рисунок подтверждает расчетное значение у@) = 3.
13. х2J\(x) + xJi(x) - J0(x)dx + C
14. (x3 - 4ж) Ji(<r) + 2x2J0(x) + С
Ответы к избранным задачам 1073
15. (ж4 - 9х2) Jx(x) + (Зх3 - 9x)J0(x) + 9 [ Jq(x) dx + С
16. -xJi(x) + J0(x)dx + С 17. 2жЛ(ж) - x2J0(x) -f С
Зж2 Ji(x) + Cs - ж3) Jo (ж) - 3 [ J0(x) dx + C 19. Dж3 - 16a:) Ji (ж) + (8ж2 - x4) J0(x) + С
I. -2Ji(x) + I J0(z) dx + C
18.
20
26,
21. J0(*)--Ji(*) + C
x
-0.3
Раздел 8.6
= x[аМх) + С2Уо(ж)] 2. у(ж) = - [ci Ji(x) + С2У1(я;)]
= « [ci Ji/2C*2) + c2J-i/2Cx2)] 4. y(<r) = x3 [Cl J2Bs1/2) + саУгра:1/2)]
о:/3 [ClJ1/3 (I^/2) +c2J_1/3 (^3/2)]
_1 /Л Г -г /~ Ч/0\ ,- /~ Q/ОчТ
1. у(ж
3. y(x
5. у(ж
6. у(ж
8. y(x
10. у(ж
11. y(x
12. y(s
= S-V4 [ClJ0Bs3/2) + с2УоBж3/2)] 7. у(я) = x-1 ldJo(x) + c2Y0(x)]
= x2 [ClJiDxV2) + C2y1Dx1/2)] 9. 2/(x) = x1/2 [ciJ1/2B*3/2) + c2J_1/2B*3/2)]
= *-!/« [d J3/2 (§^/2) + C2J_3/2 B*5/2)]
= x1/2[Clj1/e(ia.3)+caJ„1/e(|irS)]
= ^/2 [Cl Jl/5 (f ^/2) + <* J-i/5 (|^5/2)]
Глава 9
Раздел 9.1
i. f»
2. 1
3. ±n
4. 6
1074 Ответы к избранным задачам
5. 7Г
М
•*/
^L.
(
_i -£. 1 _*£ L.r
2/
5я
2
7. Не периодическая
| 1000
8. Не периодическая
-3
-2 у**~
300
-300
. ■■- —^*****^ 1 *
2 '
9. 7Г
10. |w
11. ао = 2; ап = Ьп = 0 для п ^ 1
12. (sint-f -sin3£ + -sin5M )
тг V 3 5 )
-In
2п 4я
, i i
Ъп 5тс
13. - + - ( sin£+-sin3£+-sin5t+-- ) 14. ( sint + - sin3t + - sin5t + • • )
27г\3 5 J 2тг\3 5 J
Ъп
"Й'
Ъп 5я
Ответы к избранным задачам 1075
15. 2{ sint
V 2
sin 2t-\— sin St ■
2 3
16. 7Г - 2 ( sin* + - sin2t + - sin3t + • • • )
V 2 3 J
2 л
/
/
/ ■
-Л
/
/
/
Л
/
/
■L_L
ЗЛ
/
/
71
7Г 4 / 1 1 \
17. I cos t-\— cos St -\ cos 5t + • • • J
2 7Г V 9 25 J
»5 +
4 / 1
— I cos t H—
7Г V 9
cos St H cos bt + ■
9 25
Л Л
* s ' / \
^ /
v
371
5л
1Q 7Г 1-(-1)П >1
19. oo = —; an = ^ Для n ^ 1;
4 П27Г
6n = для n ^ 1.
n
-2л
2л
1 2 /
2 7Г V
20. r + — ( cos t cos St Л— cos Ы
2 7Г V 3 5
я 2л Зл 4л
21. -7Г2 — 4 I cos t cos 2t H— cos 3t — • • • 1
3 V 4 9 J
2л 4я 6л
^ 8 2 4 >,
22. ao = -7Г , an = — Для n ^ 1;
3 n
и 4?Г ^ i
On = ДЛЯ П ^ 1.
П
40
/
7
/
-л
;
/
л
' /
/
/
Зл
' /
/
/
У.
5л
1078 Ответы к избранным задачам
4 4-(—l)n+1
11. an = -; ап = —; 6П = 0
7г 7rDn^ — 1;
для всех п > 1.
12 3 4 5
14 4
12. L= -;ао = -;ап = г—о—гт
2 7Г 7гDп2 — 1)
6П = 0 для всех п ^ 1.
дляп > 1;
2 1 + (—1)п
13. а0 = -; а\ = 0; ап = т-^—гт Для п ^ 2;
7Г 7Г(П^ — 1)
Ьх = ±;bn = 0ifn^2.
14. -sint +
2
t 1 3t
• cos cos —
,3252
12 3 4 5
j- t
16.
1
v.
1
/
2
/.
3
/
4
/.
5
18.
20.
Ответы к избранным задачам 1079
21.
24.
25.
гсЗ L
Зл
5л
Раздел 9.3
1. Ряд по косинусам: f(i) = 1
i i , i
л 2л Зл An
1 4 /
2. Ряд по косинусам: fit) = —I—г-1 cos7rt
2 7Г2 \
■)
COS 37Tt COS 57Tt COS lift
+ —^7— + ~o + „o + •
32 52
3. Ряд по косинусам: f(t) = — I cos —
7H \ 2
1 77rt \
-f-cos—-f.-.J
1 3?rt 1 5?rt
H—- cos 1—г- cos
32 2 52 2
16л4
8л4.
,
► /«
2л
/ n
4я
/ *
*" * t
6л '
4 / 1
Ряд по синусам: f(t) = — I sin* H— sin3t
7Г \ 3
-sin7t + --- j
+ - sin 5t +
Зл
5л
К-
Ряд по синусам: f(t) = — I sin7rt
тг V
sin 2nt sin ЗпЬ sin 47г£
« ,, ч 4 /sin7rt
Ряд по синусам: f(t) = — I
7Г \ 2
sin 2nt sin 37r£ sin 47rt
1080 Ответы к избранным задачам
4. Ряд по косинусам: f(t)
—3(
COS7Tt
cos 37г£ cos dnt cos 77г£
+ ^0 + _0 + -—r- + •
62
102
142
22
5. Ряд по косинусам: f{t) = I - cos
1 4nt 1 8nt
-1С081Г + 8С08-3-
. ■ cos -
7Г V2 3
1 lCbrt \
_cos_ + ...J
6. Ряд по косинусам: f(i) ■
-—cos2t+—cos3t+42
7Г2 /
4 cos t
3 V
-cos4* + ---J
\ *2
\
\
4
-7t
' Л
/\
J \J
к
A
/
Л/
Зя
/
/
/
5л
7. Ряд по косинусам: f(i)
cos 4£ cos 6£ cos 8t
+ —^r- + —^r- + -=«- +
42
62
■■■)
cos2£
"I2"
Ряд по синусам: f(t)
8 / . 7rt
= —- sin —
7Г2 V 2
1 . 37rt 1 . 5?rt 1 7-rrt
2 /
Ряд по синусам: f(t) = — si
7Г V
1 . 57rt 1 . 7\ '
+ - sin 1— sin —
5 3 7;
1 . llTTt \
+_sln_+...j
7Tt
sin —
3
2 . 9?rt
- sin
9 3
2 . Зтг*
- sin
3 3
ULl
Ряд по синусам: /(t) = 27г( sint
12 15
sin 2t
+ - sin3£ sin4tH ] ( sint+ — sin3t
3 4 / it \ 3J
)
+ — sin 5t + — sin It +
Ряд по синусам: f(t)
-1С
sint
sin 3t sin 5t sin 7£
+ ^г~ + -то- + -=з- + •
З3
53
73
Ответы к избранным задачам 1081
1 4 /
8. Ряд по косинусам: f(t) = (
i 6 7Г2 \
Ряд по синусам: /(t) = — f si
COS27Tt COS47Tt COS67T* COS87T*
+ ,o + -о + ~o +'
22 ' 42 62
sin 37rt sin 57r£ sin list
sm 7rt H -r 1 5 h —-^ h
82
33 ' 53 ' 73
ики этих двух рядов выглядят точно так же, как и графики в задаче 7, но здесь шкала от —1 до 5 (а не
от —7г до 57г) на оси t, а дуги имеют высоты 1/4 (а не 7г2/4).
cos 6t cos St \
Л ^ „, ч 2 4 /cos2i cos4t
9. Ряд по косинусам: /(t) = ^ 1 h
7Г 7Г2 V 3 15
Ряд по синусам: f(t) = sin £
35
63
Графики этих двух рядов выглядят точно так же, как и графики в задаче 7, но вместо дуг синусоиды мы
видим дуги в виде квадратных арок.
1 . 4/1 . £
Ряд по синусам: f(t) = - smt -
10. Ряд по косинусам: f(t) = ( — cos -
7Г 7Г \ 3 2
1 3t 2 4* 1 5£
+ - cos --- + —- cos — + —- cos —
5 2 12 2 21 2
1 It 2
Н cos 1 cos
45 2 60
St \
1 . 3t
+ 5Sm¥
1 . 9t \
- -— sin —- H
77 2 У
2
1 . 5t 1 . 7t
— sin 1 sin —
21 2 45 '- 2
4/1 .
— - sir
7Г V3
Л1
,fi
-2л
"Л
n
271
Л А
in
4л
L.~j_<
6я
л Л
до
8л
IOjc
-2л
я
2л
6л 1 фс 10л
*/
11. x(t) =
п нечетное
sin nt
nB - n2)
4 / .
— sm £ —
7Г V
sin 3t sin 5t sin
21
115
329
9 У
12. x(t) = --
7Г
sini sin3t sin5£ sin7t
1 1 ( 1_.
5 39 145 371
13.
«(«) = I£
(—l)nsinri7rt
1)
cosni
14.
7Г 4 /
- H V4 (-l)nsin(n7rt/2)
15. x(t) = - + -
17. Указание. Подставьте и = — t в интеграле слева.
Раздел 9.4
12 v-^ sin nt
7Г ^-^ пE — п2)
п нечетное v '
3int sin3t sin5£ sin7t
__
cos 3t cos 5£ cos
cos t + -— 1 h
1. xsp(t) = H 53
63
2. a;sp(t) =
575
It \
48
2303
(_l)(n-l)/2 n?rt
n нечетное
ПD0 - 7Г2П2)
К л- л
v10 v v
1082 Ответы к избранным задачам
/ ч . v^ (-l)n-lsmnt
n=l v y
, /sin* sin2t sin3t sin4t
V 2 2
18
52
5. *8p(t) = -3 2^
7Г° " П3A0-П27Г2)
n нечетное ч '
* 4 4^
Я" 7Г J-* (п2
п even \
COS Tit
=;(-
cos2t
6
l)(n2-2)
cos 4t cos 6t
210
1190
2%
Ък
7. Ряд Фурье F(t) = — V^ —— содержит член sin 3£, так что явление резонанса действительно имеет
7Г ^—^ Т1
п нечетное
место,
8. Резонанс не происходит.
л ~ ^ ^/ ч 4 v^ sinnt . Л
9. Ряд Фурье F(t) = — > не содержит члена sin 2t, так что резонанс не происходит.
10. Резонанс действительно происходит.
-.-. Л ^ г-,/ ч тг 4 v^ cosni
И. Ряд Фурье F(t) = --- Y1
2 7г " п'
п нечетное
не содержит члена с cos 4t, так что резонанс не происходит.
12. Резонанс действительно происходит.
13. xsp(t) и A,2725) sin(t - 0,0333) + @,2542) sinCt - 3,0817) + @,0364) sinE* - 3,1178) + • • •
14. xsp(t)«@,2500)sin(t-0,0063)-@,2000)sinBt-0,0200) + D,444)sinCt-1,5708)-@,0714) sinDt-
- 3,1130) + • • •
15. x8p(t) » @,08150) sinGrt - 1,44692) + @,00004) sinC7rt - 3,10176) + • • •
16. xsp(t)«0,5000+l,0577cosGrt/2-0,0103)-0,0099cosC7rt/2-3,1390)-0,0011 cosEtt*/2-3,1402) • • •
17. (a) xsp(t) « @,5687) sinGrt - 0,0562) + @,4721) sinC7rt - 0,3891) + @,01396) sinE?rt - 2,7899) +
+ @,0318) sinG7rt - 2,9874) + • • •
18. x8p(t) « 0,0531 sin(t - 0,0004) - 0,0088sinCt - 0,0019) + l,0186sinE* - 1,5708) - 0,0011 sinG* -
- 3,1387) + • • •
Раздел 9.5
1. u(x,t) = 4e~12tsm2x 2. u(x,t) = 7
3. u(x, y) = 5exp(—27r2t) sin7rx — ^ exp(—187r2t) sin37rx
4. u(x, t) = 2e~4t sin 2x + 2e~36t sin 6x
_ , . A ( 8тг2*\ /2тгж\ Л / 32тг2А . /4тгж\
5. u(M) = 4expf 9~"JCOSl~3~J ~2exP( 9~JC6S1~3~J
6. u(cc, £) = exp(—27r2t) sin 27гж + | exp(—87r2£) sin 47гж
WKX
Ответы к избранным задачам 1083
„ / ч 1 1 ( 167T2t\
7. и(х, t) = —|— ехр cos47nr
v J 2 2 V 3 /
8. м(ж, £) = 5 ехр(—47r2t) cos 27гж + 5 ехр(-
Q 100 „ 1 / п2тг2^
п нечетное ч 7
1А I Л 80 ^ (-1)"+! / И2Л\ . ПЯ»
10. и(х, г) = — > -— ехр sin
V ' ; тг *-*л п *Л 500 J 10
n=l N '
11 / .ч ™ 160 v^ 1 / П27ГЧ\ WKX
11. и(х. t) — 20 г- > —г- ехр cos
п нечетное ч '
, ч 80000 v^ 1 / n27T2t\ . П7ГЖ
12. шж, t) = —-— > —т- ехр .— sm
v ' ; тг3 ^ n3 *\ 10000 У 100
n нечетное ч '
400 . 1 / n27r2kt\ nirx
13. (a) u(x, t) = — V - exp ( ] sin —-; (b) При к = 1,15, uB0,300) « 15,16°C; (с) при-
7Г ^j n V 1600 / 40
nodd x '
близительно 19 часов 16 минут
14. (b) uA0,60) « 25,15°C; (c) 6 минут 54,3 сек 16. (b) 15 часов
Раздел 9.6
1. з/(ж, *) = •— cos 4t sin 2x 2. у(ж, t) = ~ cos 7rt sin 7гж — ~ cos 37r£ sin 3nx
3. 2/(x, t) = — I cos —h 2 sin - J sin ж 4. y(x, y) = ~ cos irt sin 27ГЖ
1 1 Q
5. т/(ж, t) = - cos 57r£ sin7гж Н— sin 107г£ sin 2nx 6. з/(ж, i) = > —r- cos lOnt sinnx
^ / ч v^ (-l)n+1 ... e / n ~ • 4 v^ sin2ntsinna:
7. y(x,t)= > -—5—7- sm lOrwrt sm 717ГЖ о. 2/(x,t) = cos2tsma; H— > .
*—^, 5тНп^ 7Г ^—' 71
n=l n нечетное
л , ч 4 v*^ sin2n7rtsinn7raj <л , ,ч 8 *-^ En cos 5nt + sin bnt)
9. 2/(x,t) = -j > — . 10. y(x,t) = — > ^ ш jr .
7Г4 ^—' П4 5*7T ^—' Tl/D — n^)
n нечетное n нечетное v /
11. Основная частота (частота основной (первой) гармоники, (наинизшая) собственная частота): 256 Гц;
скорость: 1024 фута в секунду
Раздел 9.7
1 , ч v^ . , пжх . п-ку 2 Гь . П7гу
1. и(ж, 2/) = > Cn smh -—■ sm -—, где сп = . . ., -ттт 9КУ) sm -r- dy
^ о о &sinn(n7ra/o; Jo &
^ птг(а - ж) . п-ку 2 fь . п-ку
2. и(ж, у) = >^ сп smh sm ——, где сп = . . ., -^т 9(У) sm -—- dy
~- о о osinh(n7ra/o) J0 о
* / ч v^ . ^^"ж . . ппу 2 fa „. . . птгх .
3. и{х, у) =} Сп sm smh , где сп = —г-Г7 ТУТ /Wsm ах
~х a a a sinh(n7ro/a) J0 a
оо
Етьтгх тмги
Ьп cos sinh , где bo = ао/26, 6п = an/(sinhn7rb/a) и {ап}о° — коэффи-
л а а
п=1
циенты расположенного по косинусам ряда Фурье функции f(x) на интервале 0 ^ х ^ а.
_ а0 . л , v^ sinh(n7r[a - х]/Ь) ппу 2 Г6 П7гу
5. tx(x,2/) = —(а - х) + > ап г-гт ТГ;— cos ~Г"» гДе а^ = Г ЗУ cos —— dy
2а ~х smh(n7ra/o) о о Jo о
с»
ЕТЬ7ГХ TL7TU
Ап cos cosh , где Aq = ао/2, Ап = an/(cosh mrb/a) и {ап}о° — коэффи-
- a a v
n=l
циенты расположенного по косинусам ряда Фурье функции /(ж) на интервале 0 ^ ж ^ а.
1084 Ответы к избранным задачам
)d0
т / ч v^ 1 / П7гу\ . гатгж , 2 Га ,, s . п-кх ,
7. и(х, у)=У оп ехр sin , где Ьп = - fix) sin dx
£^г \ а / а а Jo а
оо
8. и(х,у) = Ь 22 апе~п7гу'а cos , где {ап}о° — коэффициенты расположенного по косинусам
п—1
ряда Фурье функции f(x) на интервале 0 ^ ж ^ а.
9. t*@,5) » 41,53; t*E,5) = 50; мA0, 5) « 58,47
11. t*(s, у) = 2^ cn sinh cos —, где сп = ,.,,,..» д(у) cos — dy
пн^ное 2Ь 2Ь 6sinh(n7ra/Bb)) J0 26
2 гтг i 2 fw
13. Сп = /@)sinn0d0 14. cn = f @) cos nO с
7гап Jo 7ran Jo
2 f71" пв
тгап/2 Jo 2
Глава 10
Раздел 10.1
7. 1 = 2МУ) д 'Г™13" ,sin^, 0<x<L
^/?n(/iL + cos2/?n) L*
8 1=g 4sin/?n со8^0<ж<£/
л ~, ,. , ч v^ sin/?nsin/?na; n
'•I = 2MlH)SlH^)'0<I<1
1A Y^ 4№ sin/?n + COS/?n - 1) a n ^ ^ -
10. ж = > ' ,^ —--—- cos /?пж, 0 < x < 1
Раздел 10.2
oo
L L
2. it(cc, y) = V^ cn sin —y- sinh —-— , где {/?n)i° — положительные корни уравнения tg x = —x/hL
n=l
4/?n
ИСп =
—- /(Ж) COS -~5 rfa;.
sn>) Jo Ь
L(sinh/?n)B/?n -sin2/?n) Jo
3. u(x, y) = V^ cn sinh —-— cos —7—, где {/?n}i° — положительные корни уравнения tgx = x/hL
L L
3n)(hL + sin^/?n) Jo , £
(sinh /3n
4. w(cc, y) = УЗ c« sin —7~ exP ( f~ ) > гДе {/?n}i° — положительные корни уравнения tg# = —x/hL
n=l ^ ^
4/?n fL /?nx ,
и cn = — f(x) cos dx.
LB/?n-sin2/?n)Jo Ь
5. и(ж, t) = ^P Cn exp f ~~ J Xn{x), где Хп(ж) = /3n cos -~ h hLsin -y-, {/?n}i° — ПОЛОЖИТель-
ные корни уравнения tgx = —x/hL исп= f(x)Xn(x) dx J / Хп(жJ dx.
ж / 02kt\ 3nx /3nx
6. u(x,t) = 2J cnexp I jj- 1 Хп(х), где Хп(ж) = /3n cos —~ h /iLsin -~—, {pn}
n=i ^ L ' n L L
тельные корни уравнения tgx = 2hLx/(x2 — h2L2) и cn = I f(x)Xn(x) dx) / \ Xn(xJ dx
Ответы к избранным задачам 1085
Jo
7. t*(l, 1) « 30,8755 4 0,4737 4- 0,0074 + 0,0002 + 0,0000 + • • • « 31,4°
10. (а) а « 5,08 х 105 см/с « 11364 мили в час. (Ь) а « 1,50 х 10б см/с « 3355 миль в час.
fL . /?тж . /?пж LM cos/Зщ cos 0п ,п
1 sin —— sin —— аж = ^ 0
L L тп/Зт/Зп
20. (b) cji « 1578 радиан в секунду « 251 колебаний в секунду. Таким образом мы слышим (приблизительно)
среднюю ноту до (С).
Раздел 10.3
В задачах 1-6 и;п обозначает п-ю собственную частоту колебаний. *
л П7Г /Е П7Г ГШ
- Bп-1)тг IE
. (Зп ГШ w M/m
4. шп= —\ —, где рп — 71-и положительный корень уравнения tgж = .
L V о х
/Зп ГШ
5. ип = — J —, где /?п — п-й положительный корень уравнения АЕ/3 tg /? = fcL.
2у V о
в IE '
6. шп = — 4 / —, где /?п — п-й положительный корень уравнения (momiz2 — M2)sin2 = M(mo 4-
L \ о
+ m\)z cos z.
15. 1',03Гц
Раздел 10.4
1 /ч /^ +\ ^ 7 /"УпГ\ . 7nat 2aP0 Ji(yne/c)
3. (а) it(r,t) = > cnJo ( sin , где cn = 5 7-7—r^ • :—. (b) Откуда вы знаете,
^ V с / с 7rcpa27n«>iGnJ 7n€/c
что J\{x)/x —► 1/2 при ж —► 0?
Jo ( — ) — Jo ( — ) sin art, где 6 — радиус круговой мембраны.
11. u(r,t) =
uJJo(ub/a)
Приложение
1. Уо = 3, у! = 3 4 Зж, 2/2 = 3 + Зж 4- § ж2, 3. у0 = 1,2/1 = 1 - х2, у2 = 1 - ж2 4- f ж4,
уз = 3 4 Зж 4- § ж2 4- |ж3, уз = 1 - х2 4- \хА - ±ж6,
" у4 = 3 4 Зж 4- |ж2 4 f ж3 4- |ж4; у4 = 1 - ж2 '+ f ж4 - |ж6 4- ^ж8;
у(ж) = Зех у(х) = ехр (-ж2)
5. уо = 0,2/i = 2ж, у2 = 2ж 4- 2ж2, 7. у0 = 0, у\ = ж2, уг = ж2 4- §ж4,
уз = 2ж 4 2ж2 4- |ж3, уз = ж2 4- |ж4 4- |ж6,
у4 = 2ж 4 2ж2 4 f ж3 4- §ж4; у4 = ж2 + ±ж4 4 \xQ + £ж8;
у (ж) = е2ж - 1 у(х) = ехр(ж2) - 1
9. УО = 1, У1 = A 4-ж) 4- |ж2, у2 = A 4ж + ж2) 4- ^ж3, у3 = A 4- ж 4- ж2 4- ±х3) 4- ^ж4; у(ж) = 2ех
Ь
-1-ж = 14ж4-ж24 |ж3 Н
11. уо = 1, ух = 1 4- ж, у2 = A 4- ж + ж2) 4- |ж3, уз =; A 4 ж 4- ж2 4- ж3) 4- § ж4 4- §ж5 4- |ж6 4- ^ж7;
у(х) = = 1 4 ж 4- ж2 4- ж3 4- ж4 + ж5 Н
1 — ж
12. уо = 1, У1 = 1 + \х, У2 = 1 + §х + §х3 + ±х3 + ^х4, s/з = 1 + \х + |х2 + ^х3 + if х4 + • • •;
У(х) = A-х)-1/2
1086 Ответы к избранным задачам
13.
Хо
. 2/о.
Х2
2/2
Хз
2/3
1
-1
1 + St
-l + 3t
14. x(t) =
1 + 3t + U2 4
-l + 5t- ft2
1 + 3t + k2 + |t3 1
-l + 5t- |t2 + I*3
e* 4- te*
16. узA)« 0,350185
Предметный указатель
р
Principia Mathematica, 157; 364
Б
Безвоздушное пространство, 172
Бернулли, Даниил A700-1782), 761; 849
Бесконечная геометрическая прогрессия, 695;
741
Бессель, Фридрих В. A784-1846), 761
Биения, 306
Биномиальный ряд, 695; 708; 741
Бифуркация, 152; 543; 566; 599
диаграмма, 153
точка, 152
Хопфа, 545
Большой взрыв, 79
Браун, 835
Буй, 282
Буферная функция, 865
В
Ван-дер-Поль, Балтазар A889-1959), 589
Вариация параметров, 296; 299
для неоднородных систем, 503
Ватсон, Дж. Н. A886-1965), 761
Вектор, 403
скалярное произведение, 403
Вектор-столбец, 403
Вектор-строка, 403
Величина шага, 173; 191; 390
Верн, Жюль A828-1905), 169
Вертикальное движение с гравитационным
ускорением, 40
с сопротивлением воздуха, 156
Вещественная часть, 259
Виолончель, 328
Внешняя сила, 269
вектор, 453
Водные часы, 80
Волновое уравнение
двумерное, 867
одномерное, 850
решение Даламбера, 856
Вольтерра, Вито A860-1940), 549
Вращение струны, 337
Вронскиан, 227; 242; 245
векторнозначных функций, 412
Вронский, Юзеф Мария A778-1853), 243
Второй закон движения, 37; 40; 156; 269; 303;
309; 337; 349; 444; 849
Второй закон Ньютона для движения, 37; 40;
156; 170; 269; 303; 309; 337; 349; 444; 849
А
Автомобиль
колебания, 317
с двумя осями, 458
Автономная система, 509
линеаризованная, 529
Автономное дифференциальное уравнение, 146
неустойчивая точка равновесия, 147
равновесное решение, 146
точка равновесия, 146
устойчивая точка равновесия, 147
Айне, Е. Л., 373; 783
Американское население, 132; 133; 140; 141;
144
Ампер (единица тока), 321
Амплитуда, 272
Амплитуда, зависящая от времени, 277
Анализ подсистем, 429
Аналитическая функция, 695
Аналогия между механическими
и электрическими величинами, 323
Аналоговые компьютеры, 323
Аппроксимация Стерлинга, 97
Арбалет, 156; 159; 162; 199; 213; 394
Аргумент (комплексного числа), 262
Арнольд, Дэвид, 60
Артин, Эмиль, 764
Асимптотическая устойчивость, 518; 537; 539
Асимптотические приближения, 773
1088 Предметный указатель
Выживание отдельного вида, 555
Вынужденные колебания, 221; 269
затухающие, 311
незатухающие, 304
резонанс, 453
Вырожденный узел, 534
Вязкость, 285
Г
Гамма-функция, 763
Гармоника, 855
Гармоническое колебание, 272
Генри (единица индуктивности), 321
Гипергеометрическое уравнение Гаусса, 741
Гипергеометрическое уравнение, ряд, 741
Гипоциклоида, 379
Глейк, Джеймс, 607
Градина, 97
Граничная
(краевая) задача (задача, в которой заданы
граничные (предельные, или краевые)
значения), 331; 332; 832
скорость, 50
численность популяции, 51
Граничные решения, 151
д
Даламбер, Жан Лерон A717-1783), 849
Движение вверх, 160
Движение ракеты, 170
Двумерные системы, 355
Декремент затухания, 285
Демографический взрыв, 128; 137
Детерминант Вандермонда, 251
Дефект (собственного значения), 466
Диаграмма ветвления, 597
Дикритический узел, 533
Дифференциальное уравнение в частных
производных, 30; 787
граничные условия, 831; 833
Добыча, 549
Докритическое затухание, 277
£
Естественный рост и распад, 69
ж
Железнодорожные вагоны, 448; 457; 474
Жертва убийства, 81
Жесткая пружина, 572
колебания, 572
Жесткость пружины, 268
з
Задача
Коши (задача с начальными условиями), 30;
223
для линейных систем, 414
и элементарные операции над строками,
414
порядка п, 239
о брахистохроне, 81
о сквозном отверстии в Земле, 282
пловца, 41
снегоочистителя, 81
Задачи на смеси, 91
Задержка во времени, 273
Закон
всемирного тяготения Ньютона, 162; 364;
391
Гука, 268; 570
Ньютона охлаждения, 22; 74; 99; 145; 846
сопротивления Стокса, 285
Торричелли, 23; 75
Законы Кирхгофа, 322; 351
Зальцман, Барри, 605
Замена переменных (методы), 101
Замкнутая траектория, 520
Запаздывание во времени, 325
Затухающие вынужденные колебания, 825
Затухающие колебания, 269
нелинейные, 575
Затухающие колебания маятника, 583
Звуковые волны, 855
гармоника, 855
обертон, 855
основная частота (частота основной (первой)
гармоники, (наинизшая) собственная
частота), 855
Землетрясение в Мехико, 308
Знаменитые числа, 187; 201; 214
и
Изолированная точка равновесия, 527
Импеданс, 324
Интегральная кривая, 45; 356
Интегральный синус (функция), 90
Интегрирующий множитель, 85
Иррегулярная (нерегулярная) особая точка, 725
Источник, 147; 514
й
Йорк, Джеймс, 598
к
Каскад, 96
Катушка индуктивности, 321
Кеплер, Иоганн A571-1630), 364
законы движения планет, 364; 398
Кинетическая энергия, 309
Кларк, Артур, 45
Клепсидра, 80
Колебания температуры
внутри помещения, 99
Колебания численности популяции, 552
Колебания, вызванные землетрясением, 459
Комета Галлея, 399
Комплексное решение, 433
Комплекснозначная функция, 259
Комплексные собственные значения, 433
Конденсатор, 321
Конкуренция, мера, 554
Конкурирующие виды, 553
Консоль, 340
Константа Фейгенбаума, 599; 607
Коэффициент
затухания, 268
рождаемости, 127
температуропроводности, 831
теплопроводности, 830
усиления, 307 <
Коэффициенты Фурье, 789; 793
Кратность собственного значения, 462
Критерий точности, 112
Критическая скорость (вращения струны), 338
Критическое
демпфирование, 275
усилие при продольном изгибе, 344
Круговая частота, 272; 277
затухающих гармонических колебаний, 277
Кулон, 321
Кусочно-гладкая функция, 800
Кутта, Вильгельм A867-1944), 203
Л
Лапласиан, 867
Лента Росслера, 607
Линеаризация, 530
Линеаризованная система, 529
Линейная зависимость, независимость, 226; 2^1
векторнозначных функций, 411
Линейная система, 360
Предметный указатель 1089
верхняя треугольная форма, 415
метод собственных значений, 424
неоднородная, 360; 417; 498
общее решение, 413
однородная, 360
первого порядка, 409
почти линейная, 530
решение, 360; 409; 417
соответствующее однородное уравнение, 410
Линейное дифференциальное уравнение, 85;
219
Линейный дифференциальный оператор, 370
Листы Декарта, 546
Логистическая модель, 140; 142
Логистические популяции, взаимодействие, 561
Логистическое уравнение, 50; 83; 129; 201; 592
в конечных разностях, 593
конкуренция (соревнование), 135
ограниченные ресурсы среды, 134
пропорциональность произведению, 135
со сбором урожая, 150; 202
Локальная ошибка, 178
Лоренц, Э. Н., 604
Лунный посадочный модуль, 38; 163; 385
м
Математическая модель, 25
Математический маятник, 270
Математическое моделирование, 25
Матрица, 401
вычитание, 402
главная диагональ, 406
детерминант, 406
единичная, 405; 414
жесткости, 444
коэффициентов, 409
масс, 444
несингулярная, 406
нильпотентная, 488
нулевая, 402
обратная, 406
порядок, 405
равенство, 402
расширенная, 415
сингулярная, 406 .
сложение, 402
сопротивления, 475
столбцы, 401
строки, 401
транспонирование, 403
умножение, 403
1090 Предметный указатель
фундаментальная, 482 ,
экзотическая, 482
экспоненциальная функция, 486
элементарные операции над строками, 415
элементы, 401
Якоби, 530
Матричная функция, 408
дифференцируемая, 408
непрерывная, 408
Матричное дифференциальное уравнение, 482
Маховик на телеге, 303
Маятник, 270; ?82; 316; 780
нелинейный, 578
переменной длины, 780
Метод
исключения, 368
Ньютона, 255; 336; 779
неопределенных коэффициентов, 287
для неоднородных систем, 498
Рунге-Кутта, 203
для систем, 383
методы с переменной величиной шага, 390
ошибка, 204
степенных рядов, 696
Фробениуса, 728
исключительные случаи, 753
логарифмический случай, 750
нелогарифмический случай, 744
Методы предсказания и поправки, 192
Механические колебания, 374
Мирное сосуществование двух видов, 559
Мировое население, 144
Мнимая часть, 259
Многочлен
Лежандра, 718
Эрмита, 720 '
Многоэтажное здание, 459
Модель одноколесного автомобиля
(велосипеда), 310
Модуль
(комплексного числа), 262
Юнга, 342; 776
Мягкое приземление, 38; 45
н
Нагретый стержень, 830
с изолированными концами, 841
с нулевыми температурами в конечных
точках, 837
Накопленная ошибка, 178
Население мира, 72
Начальная скорость, 37
Начальное
положение, 37
условие, 24; 30
Недемпфигюванное движение, 269
Недемпфированные вынужденные колебания,
304
Незакаленная (мягкая) пружина, 573
колебания, 573
Нелинейная пружина, 570; 571
Нелинейный маятник, 578
период колебаний, 582; 587
Неоднородная система, 360; 417
Неоднородное
граничное (краевое, предельное) условие,
833
уравнение, 220; 247
Неопределенные коэффициенты, 287; 290; 294;
499
Несингулярная матрица, 406
Неустойчивая точка равновесия, 147; 516
Нечетная функция, 806
Нечетное продолжение периода 2L, 809
Неэлементарная функция, 172
Неявное решение, 65; 67
Нильпотентная матрица, 488
Нонбюрг, Энн, 783
Ньютон, сэр Исаак A642-1727), 157; 364
О
Обертон, 855
Обобщенный
собственный вектор, 469
степенной ряд, 728; 731
Обратная матрица, 406
Общее
решение, 34; 67; 227; 228
неоднородного уравнения, 248
однородного уравнения,,246; 248; 417
уравнение численности популяции, 128
Обыкновенная точка, 709
Обыкновенное дифференциальное уравнение,
30
Однородное уравнение, 103; 220
Однородные граничные условия, 833
Околорезонансные явления, 824
Октава, 855
Ом (единица сопротивления), 321
Оператор, 247
линейный дифференциальный, 370
Определитель-оператор, 371
Предметный указатель 1091
Определяющее уравнение, 129
Ортогональные функции, 188
Основная
теорема алгебры, 255; 425
частота (частота основной (первой)
гармоники, (наинизшая) собственная
частота), 855
Особая точка, 109
иррегулярная (нерегулярная), 125
регулярная, 725
Особенная матрица, 406
Особое решение, 68
От Земли до Луны, 166; 169
Отсутствие независимой переменной, 116
Оттянутая струна, 854
п
Падение напряжения, 322
Параметрическое уравнение Бесселя, 169
Параметры, вариация, 296; 299
Парашутист, 208; 216
Парашют, 159; 161; 184; 198; 208; 212
Пенлеве, трансцендентное уравнение, 183
Переменная величина шага, 390
Переменное гравитационное ускорение, 162
Переходная составляющая решения
(дифференциального уравнения), 50; 455
Переходный ток, 324
Период, 212; 186
полураспада, 13
Периодическая функция, 186
Периодический сбор урожая и пополнение
запасов, 202
Петляющий автобусный маршрут (орбита), 393
Пилообразная функция, 199
Плоскость детерминант-след, 541
По, Эдгар Аллан A809-1849), 180
Подавление, мера, 554
Показатели степени (для дифференциального
уравнения), 129
Показатель смертности, 121
Поле направлений, 46; 511
Полином от оператора, 256
Полкинг, Джон, 60; 526; 541
Полупериод функции, 195
Понижение порядка, 252; 149
Популяция с жертвой (добычей) и хищником,
549
Пороговая численность популяции, 136
Пороговое решение, 151
Порядок дифференциального уравнения, 28
Посадка космического корабля, 391
Постоянная
распада, 11
тяга, 111
Постоянное ускорение, 31
Потенциальная
емкость экологической системы, 132
энергия, 309
Потенциальное уравнение, 868
Поток теплоты, 830
Почленное
дифференцирование ряда, 698; 811
интегрирование ряда Фурье, 815
Почти линейная система, 530; 538
устойчивость, 538
Практический резонанс, 312
Предельная
скорость, 158
численность популяции, 131
Предельный цикл, 545
Представление в виде степенного ряда, 693
Пример струны гитары, 851; 859
Принцип
наложения, 221; 238
для дифференциальных уравнений
в частных производных, 833; 834
для неоднородных уравнений, 294
для систем, 411
суперпозиции, 221; 238
для дифференциальных уравнений
в частных производных, 833; 834
для неоднородных уравнений, 294
для систем, 411
тождественности, 698
Прирост популяции, 69
и удвоение периода, 592
Продольный изгиб вертикальной колонны, 115
Произведение матриц, 403; 404
р
Радиоактивный распад, 10
Радиочастота,, 328
Радиус сходимости, 101
Разделение переменных в дифференциальных
уравнениях в частных производных, 835;
851
Ранга г обобщенный собственный вектор, 469
Расширенная матрица коэффициентов, 415
Реактивное сопротивление, 325
Регулярная особая точка, 725
Резистор, 321
1092 Предметный указатель
Резонанс, 307; 454
околорезонансные явления, 824
практический, 312
чистый, 307; 824
электрический, 328
Рекуррентная формула, 699
с двумя членами, 715
со многими членами, 715
Решение
Даламбера, 856; 857; 864
дифференциального уравнения, 22; 29
линейного уравнения первого порядка, 90
на интервале, 28
неявное, 65
общее, 34; 67
однопараметрическое семейство, 27
особое, 68
системы, 349
существование, единственность, 52; 89; 223;
238
Решения в виде
ряда Тейлора, 714
экспоненциальной функции от матрицы, 489
общие, 491
Рунге, Карл A856-1927), 203
Рэлей, Лорд (Джон Уильям Стратт, 1842-1919),
588
Ряд
биномиальный, 695; 708; 741
геометрический, 695; 741
гипергеометрический, 741
Лейбница, 803
Маклорена, 695
почленное дифференцирование, 698
почленное сложение, 696
принцип тождественности, 698
радиус сходимости, 701
сдвиг индекса, 700
степенной, 693
сходящийся, 694
Тейлора, 695
тригонометрических функций, 705
Фурье
и решение дифференциальных уравнений,
812
почленное дифференцирование, 811
почленное интегрирование, 815
ряд по косинусам, 809
ряд по синусам, 809
сходимость, 800
функции периода 2ir, 789
функции периода 2L, 797
формальное умножение, 696
экспоненциальный, 695
с
Сбор урожая в логистической популяции, 150;
202
Сверхзатухание, 275
Свободное движение, 269
затухающее, 274
незатухающее, 271
Свободные колебания, 221; 375; 448
Сдвиг индекса суммирования, 700
Седловая точка, 515; 533
Семейства языков, 79
Сепаратриса, 558; 573
Система
второго порядка, 445; 446
первого порядка, 353; 409
с конкуренцией (соревнованием), 554
хищник-жертва, 550
Система, состоящая из материальной точки
заданнбй массы, закрепленной на
пружине, с поршнем, 220
Скорость, 37
граничная, 50
Сложение (матриц), 402
Сложный процент, 70
Собственная
мода колебания, 376; 448
частота, 304; 376; 448
Содержание теплоты, 831
Соответствующее однородное уравнение, 220;
247; 287; 289; 410; 418
Сопротивление
воздуха, 157
пропорциональное квадрату скорости, 160
пропорциональное скорости, 49; 157
пропорциональное квадрату скорости, 160
пропорциональное скорости, 157
Соревнование и сотрудничество, 562
Сотрудничество и конкуренция (соревнование),
562
Сохранение механической энергии, 270; 309
Спиральный
источник, 520
сток, 520
Статическое
положение равновесия, 269
смещение, 307
Степенной ряд, 693
Предметный указатель 1093
Сток, 147; 514
Стоунхедж, 73
Странный аттрактор Лоренца, 604; 606
Стянутый стержень, 343
Сходимость
ряда Фурье, 800 <
степенного ряда, 694
т
Телега с маховиком, 303
Тембр, 855
Толстое, Г. П., 800
Точка равновесия
(автономного уравнения), 146
(системы), 510
изолированная, 527
седловая точка, 515
спиральный источник, 520
спиральный сток, 520
устойчивость, 516
центр, 517
Точка равновесия (системы), 513 ^
асимптотическая устойчивость, 518
классификация, 539
системы хищник-жертва, 550
узел, 513
фокус, 520
Траектория, 355; 509
замкнутая, 520
полета, 109
Трапецеидальная волновая функция, 805; 821;
865
Треугольная волновая функция, 805; 821; 865
Тригонометрических функций ряд, 705
Трубочка кларнета, 588
у
Углерод 14, 71
Удар по бейсбольному мячу, 387; 395
Удвоение периода, 596
в механических системах, 602
Удельная теплоемкость, 830
Узел, 513
вырожденный, 514; 532; 534
дикритический, 514; 533
Узел-источник, 532
Узел-сток, 532
Уравнение
Бернулли, 106
Бесселя, 252; 693; 734; 756; 761; 772
модифицированное, 782
параметрическое, 769
Ван-дер-Поля, 590
Дуффинга в случае вынужденных колебаний,
600
естественного роста, 72
Клеро, 120
Лапласа, 868
в полярных координатах, 874
Лежандра, 693; 717; 724
первого порядка, 30
Риккати, 119; 778
Рэлея, 588
с разделяющимися переменными, 63
теплопроводности
двумерное, 866
одномерное, 830
численности популяции, 128
Эйри, 721; 775
Эрмита, 720
Ускорение, 38
Условный период затухающих гармонических
колебаний, 277
Усовершенствованный метод Эйлера, 192
ошибка, 192
Установившееся периодическое решение, 455
Установившийся периодический ток, 324
Устойчивая точка равновесия, 147
Устойчивость
линейных систем, 537
почти линейных систем, 538
Устойчивый центр, 536
Ф
Фаза, 272
Фазовая
диаграмма, 145
Фазовая плоскость, 509
скорость и положение, 571
Фазовый портрет, 355; 511
Фарада (единица емкости), 321
Фейгенбаум, Митчелл, 599
Ферхюльст, Пьер-Франуа A804-1849), 132; 140
Физические единицы, 39
Флагшток, 778
Фокус, 535
Формальное умножение рядов, 696
Формула
Абеля, 235; 251
Родрига, 720
Фробениус, Георг A848-1919), 728
Фундаментальная матрица, 482
1094 Предметный указатель
Фундаментальные матричные решения, 483
Функция
Бесселя
асимптотические приближения, 773
модифицированная, 782
нулевого порядка, второго рода, 756
нулевого порядка, первого рода, 735
порядка §, 758
порядка п, второго рода, 767
порядка р, первого рода, 765
порядка 1, второго рода, 756; 760
порядка 1, первого рода, 740
порядка 1/2, 739
тождества, 767
в виде прямоугольного колебания (меандр),
787; 821
Хевисайда, 819
Эйри, 721
Функция, дающая положение, 37
Фурье Жан Батист Жозеф, A768-1830), 761;
787; 835
X
Хаос, 592
и удвоение периода, 599
Характеристическое уравнение, 231; 255
комплексные корни, 260; 262
кратные корни, 232; 257; 262
матрицы, 425
различные вещественные корни, 231; 255
Хищник, 549
Хищничество, 562
Ц
Центр, 517
степенного ряда, 695
устойчивый, 517; 536
Цепная линия, 83
Цепочка (собственных векторов), 469; 473
Цепь RLC, состоящая из сопротивления,
индуктивности и емкости, 321
задачи Коши (задачи с начальными
условиями), 326
Циклоида, 378
ч
Частное решение, 34
Частота, 272
резонанс, 328
Черная дыра, 168
Черчилль, Р., 835
Численность популяции аллигаторов, 137; 138
Число Фибоначчи, 708
Чистый резонанс, 307; 824
Я
Явление Гиббса, 792
Яма и маятник, рассказ, 780
Научно-популярное издание
Чарльз Генри Эдварде, Дэвид Э. Пенни
Дифференциальные уравнения
и краевые задачи:
моделирование и вычисление с помощью
Mathematica, Maple и MATLAB.
3-е издание
Литературный редактор Л.Н. Важенина
Верстка А.Н. Полинчик
Художественный редактор С.А. Чернокозинский
Корректор Л.А. Гордиенко
Издательский дом "Вильяме"
127055, г. Москва, ул. Лесная, д. 43, стр. 1
Подписано в печать 17.10.2007. Формат 70x100/16.
Гарнитура Times. Печать офсетная.
Усл. печ. л. 89,01. Уч.-изд. л. 72,4.
Тираж 1000 экз. Заказ № 5182
Отпечатано по технологии CtP
в ОАО "Печатный двор" им. А. М. Горького
197110, Санкт-Петербург, Чкаловский пр., 15.
Таблица преобразований Лапласа
(изображений по Лапласу)
В этой таблице в краткой форме приведены общие свойства преобразования Лапласа для
конкретных функций, выведенные в главе 7.
Функция
/(*)
af(t) + bg{t)
/'(*)
/"(*)
/<">(*)
f f(r)dr
Jo
eat№
u(t-a)f(t-
ff(r)g(t-
Jo
tfit)
tnf(t)
№
t
a)
t)cLt
f(t), период р
1
t
tn
1
л/тг£
ta
Преобразование
F(s)
aF(s) + bG(s)
sF(s) - /@)
s2F(s) - S/@)
-/Чо)
s"F(s)~sn-1f@)
s
F(s - a)
e-"F(e)
F(s)G(s)
-F'(s)
(-1)"^(«)
/»oo
/ F(a) da
1 /V
1 - е-?* J0
1
s
1
s2
n\
sn+l
1
Г(о + 1)
stf(t)dt
Функция
eat
tneat
cos kt
sin kt
/(n_1)@) cosh kt
sinh kt
eat cos kt
eat sin kt
— (sin to-
—- sin kt
2k
-kt
cos kt)
— (sin to + to cos to)
2k
u(t — a)
5(t - a)
(_l)[£/aJ
(прямоугольное колебание, меандр)
— (лестница)
Преобразование
1
s — a
n\
(s - a)^1
s
s2 + k2
к
s2 + k2
s
s2 -к2
к
s2 -к2
s — a
(s - aJ + к2
к
(s - aJ + к2
1
(s2 + k2J
s
(s2 + A:2J
s2
(s2 + A:2J
e-as
s
c-as
e
1 as
-tann —
s 2
e-as
s(l -e~as)
Таблица интегралов
3. /'—= 1п|и| + С
U
4. eudu = eu + C
ПРОСТЕЙШИЕ ВЫРАЖЕНИЯ
1. udv = uv — vdu
2. Iundu = —^--un+l +C, еслип^-1
J n + 1
■p-
■/-
5. [ audu = ^— + C
J In a
6. / sin и du = — cos и + С
7. / cos и du = sin и + С
8. / sec2 и du = tg и + С
9.jco^udu = -ctgu + C
10. secu tgudu = secu +С
11. / cosec ?x ctg udu = — cosec ?x + С
12. / tgudu — In | secu| + С
13. ctgudu = \n\s'mu\ + С
14. / sec?xdu = In | secu + tgu\ + С
15. / cosec w du = In | cosec и — ctg w| + С
f du . и „
16. / = = arcsm —h С
У у/а2-и2 а
f du 1 ix _,
17- / 2 , 2 = " аГС1ё " + C
J az + uz a a
f du 1
ix + a
и — a
+ C
ТРИГОНОМЕТРИЧЕСКИЕ ВЫРАЖЕНИЯ
23
<iw — — - B + sin2 ix) cos и + С
о
f2ll Г п
19. / sin udu—-и—-sin2u + C 23. / sin и
7 2 4 J
20. / cos2 udu — -u + - sin2u + С 24. / cos3 udu = -B + cos2 u) sinw + С
21. tg2 udu = tgu-u +С 25. / tg3 udu = - tg2 ix + In | cosw| + C
22. / ctg2 udu — — ctg и — и + С 26. / ctg3 udu — —- ctg2 и — In | sin u\ + С
/I i
sec3 udu = - sec и tg и + - In | sec w + tg u\ + С
/I i
cosec3 udu = — - cosec и ctg ix + - In | cosec ix — ctg u\ + С
A A
f • 7 sinfa — b)u sinfa + b)u _, 2/72
P. / sinau smowaw = —— — ———^ h С, если a ^ 6
2(a - b) 2(a + 6)
Таблица интегралов (продолжение)
30. / cos aw cosbudu = " ~ v~—^^ + ""Г,ч~ ' 7\У~ + С, если а2 ф Ъ2
J 2(а — b) 2(а + Ь)
f • ,7 cos(a - Ь)и cos(a + b)u _, 9/79
31. / sin aw cosbudu = — — — г- h С, если az Ф ег
J 2(a-b) 2(a + b) ' ^
32. smn и du = sinn~1ucosu-\ / sinn_2 и du
J n n J
33. / cosn udu — — cosn_1 и sin и H / cosn_2 и du
J n n J
34. / tgn иdu= -tgn~1u- / tgn~2 udu, если n ^ 1
7 71-1 J
35. ctgn и du = -ctgn_1w — ctgn~2 udu, если n ^ 1
J n-\ J
36. / secn udu = secn_2 и tg и -\ / secn~2 и du, если пф\
J 71-1 71- 1 7
37. /cosec"Mdu=-^-coSec-uctgM+^/cosec-u^ если „ * 1
J 71-1 71- 1 7
38. / w sin w dw = sin w — w cos w + С
39. / w cos udu = cos w + и sin w + С
40. / wn sin udu = —un cos и + n un~l cos w a7^
41. / un cos w dw = un sin w — тг / un~l sin w dw
ВЫРАЖЕНИЯ, СОДЕРЖАЩИЕ у/и2 ± а2
/2
vV ± a2 du = ^ V^2 ± a2 ± %r In U + V^2 ± И + С
43. / , dU = In L + \Л*2±а2| + С
7 vV ± a2 I I
ВЫРАЖЕНИЯ, СОДЕРЖАЩИЕ у/а2 - и2
/2
V а2 — и2 du = — у а2 — w2 + —- arcsin —h С
2 2 а
Таблица интегралов (продолжение)
ВЫРАЖЕНИЯ, СОДЕРЖАЩИЕ СТЕПЕНИ, ЭКСПОНЕНТЫ И ЛОГАРИФМЫ
f f eau
46. / ueudu = (и- 1)еи + С 49. / еаи sin Ъи du = ——-^ (a sin Ъи - Ъ cos Ъи) + С
47. / ипеи du = uneu -п / un~leu du 50. / еаи cos Ъи du = ^ (a cos bu + b sin Ъи) + С
/un+l un+l
un \nudu= In и - т ттт + С
п + 1 (п + 1J
выражения, содержащие обратные тригонометрические
функции
51. / arcsinudu = и arcsinи + у/1 — и2 + С 52. / arctg udu — и arctg и 1пA + и2) + С
\ / sec-1 udu — u sec-1 и — In \u + у/и2 — 1 \ + С (здесь обозначено sec-1 и = arcsec и)
и arcsin udu = - Bи2 — 1) arcsin и + — v 1 — и2 + С
4V 4
/1 и
и arctg udu = - (и2 + 1) arctg и — — + С
Z Z
/и2 i
и sec-1 udu—— sec-1 и — — у/и2 — 1 + С (здесь обозначено sec-1 и = arcsec и)
*п t п • А иП+1 • 1 Г иП+1 j , 1
57. / и a,rcsmuаи = arcsinw / . du, если п Ф — 1
J П + 1 n+lj y/T^2 ^
/ип+1 I Г ип+1
un bictgudu = - arctg и / ~ du, если п ф — 1
п + 1 ъ п + 1 J 1 + и2 ' ^
53,
54
/ип+ 1 f ип+
ип sec-1 udu = sec-1 и / , du, если п Ф — 1
п + 1 n + lj у/и^^Т ^
(здесь обозначено sec-1 и = arcsec и)
другие полезные формулы
60.
/ ипе~и du = T(n + l) = n\ (п ^ 0) 61. Г е~аи2 du=\xj^- (а > 0)
Jo Jo 2 у о*
/•тг/2 лтг/2
62. / sinnudu = cosn du =
Jo Jo
1 • 3 • 5 • • • (n - 1) 7Г
— • —, если п четное и п ^ 2
2-4-6---П 2'
— -, если п нечетное и п > 3
3-5-7---П