














































Автор: Белов Г.А.
Теги: электротехника физика электроника преобразования
ISBN: 5-7677-0451-1
Год: 2001




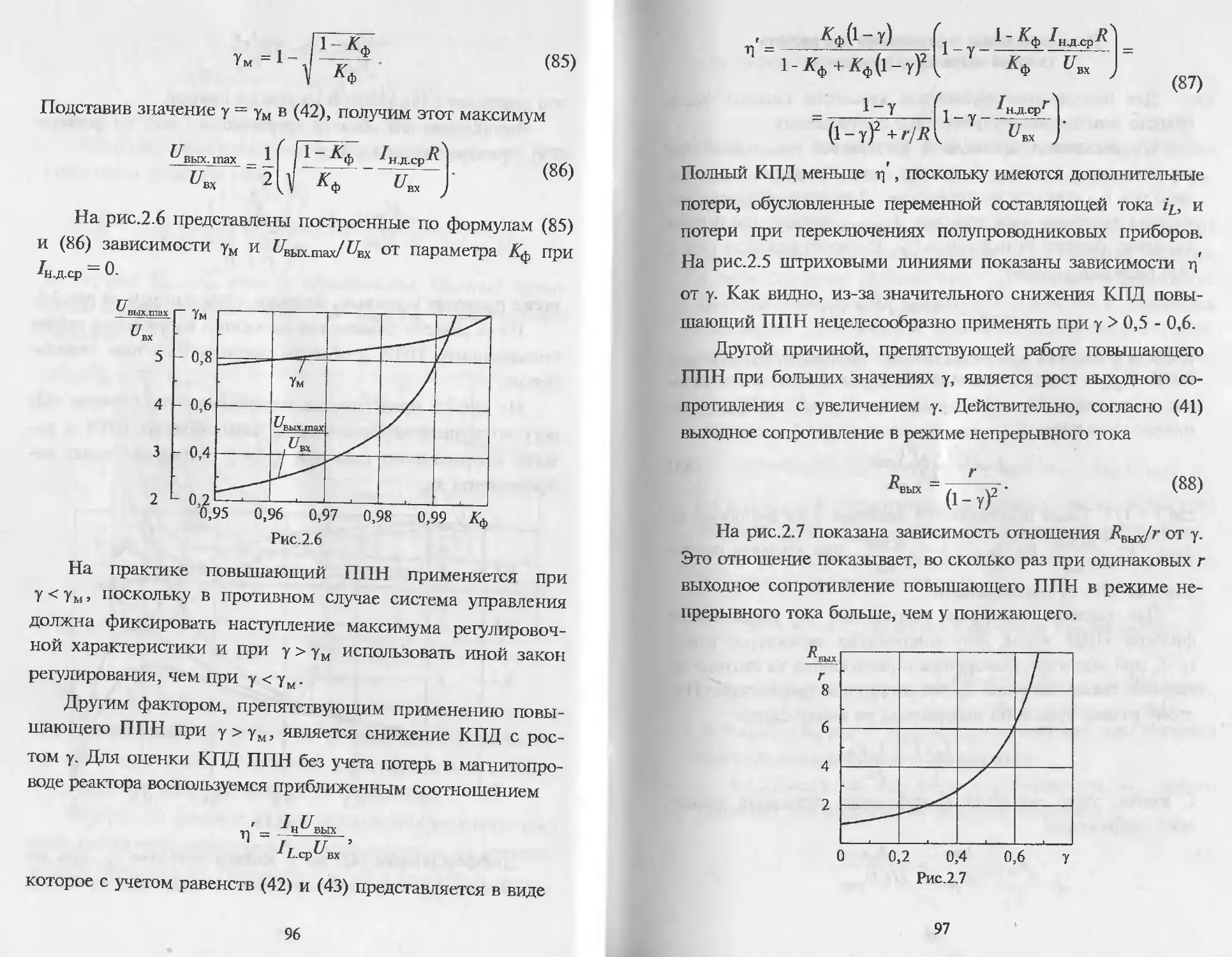
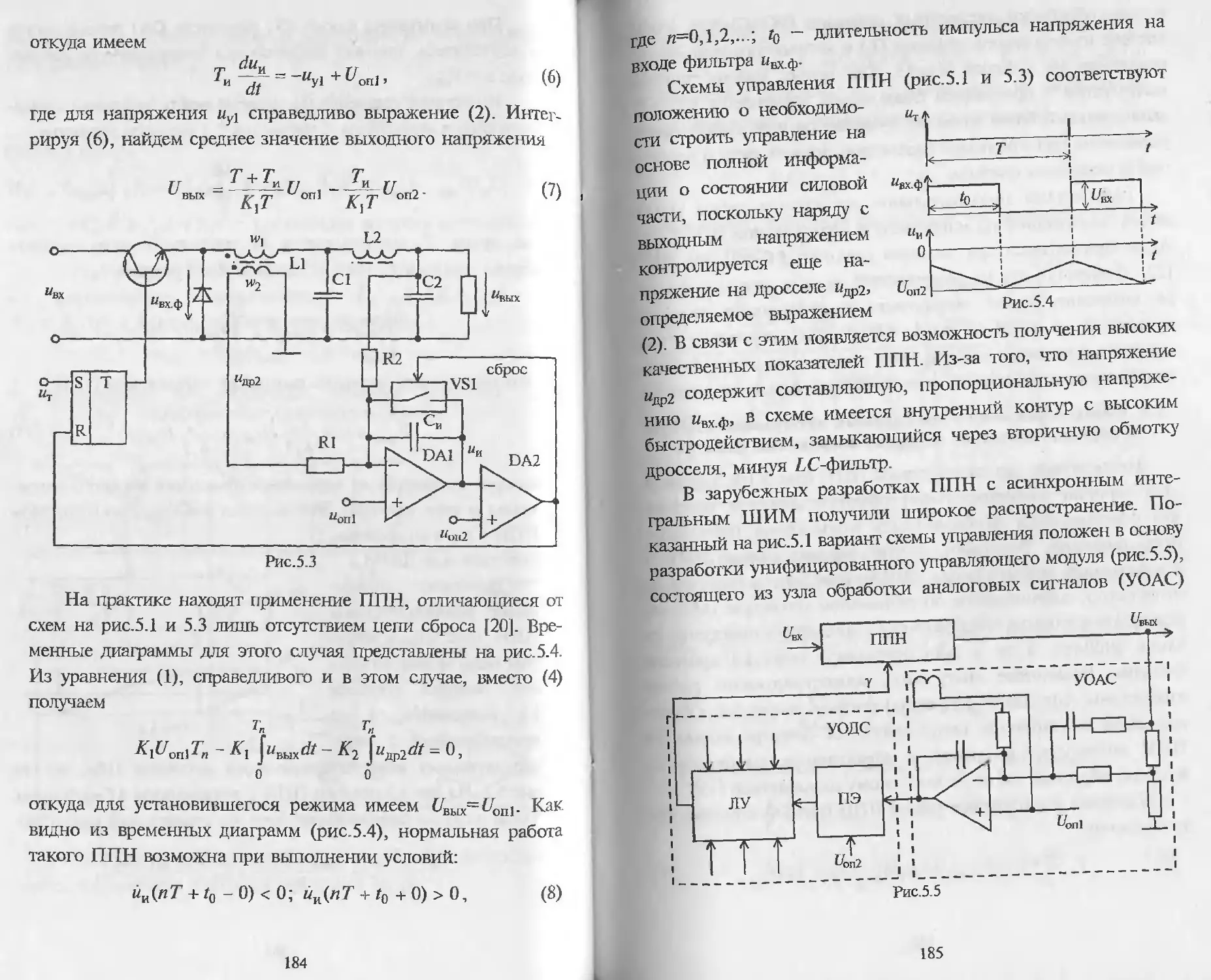
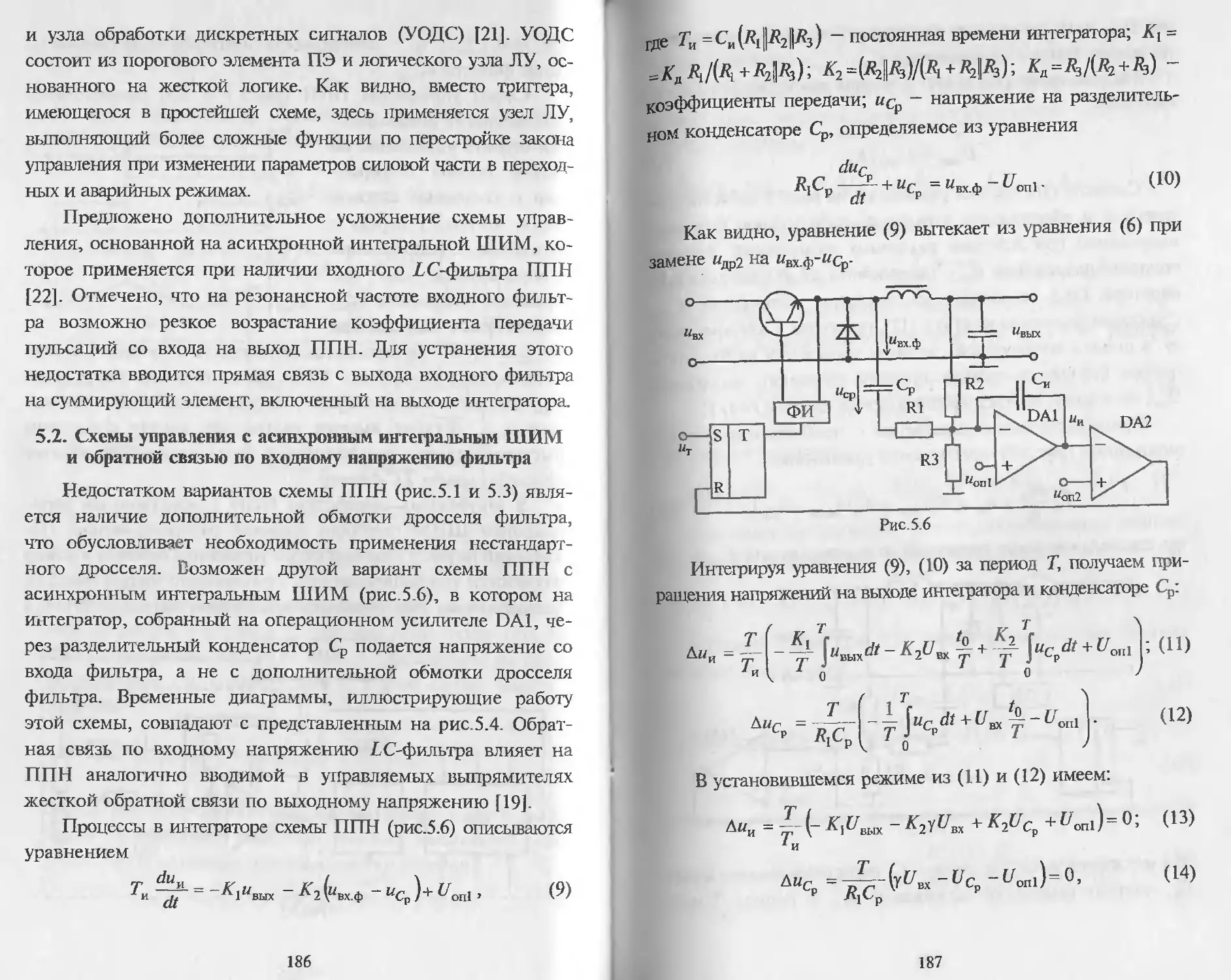
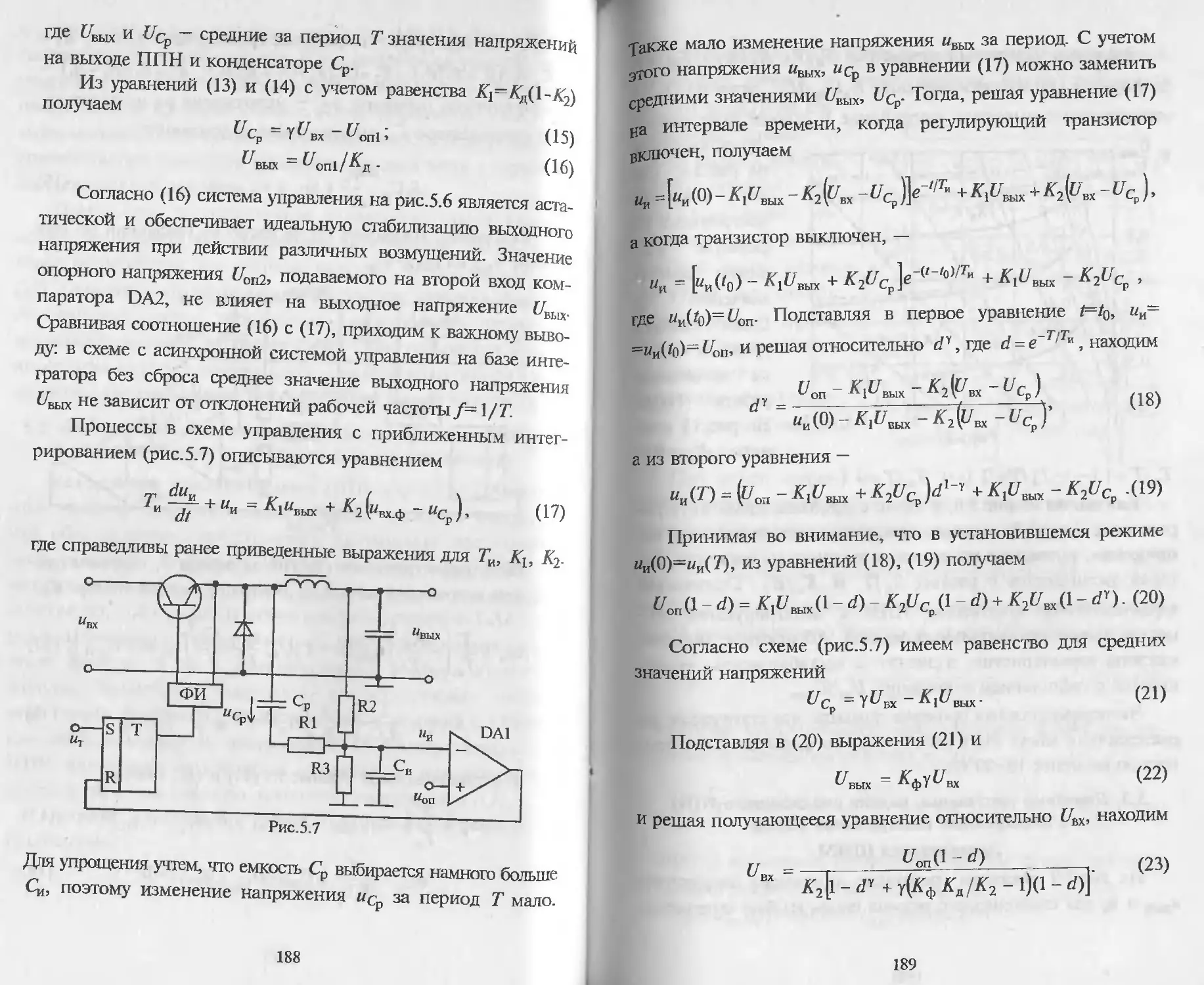
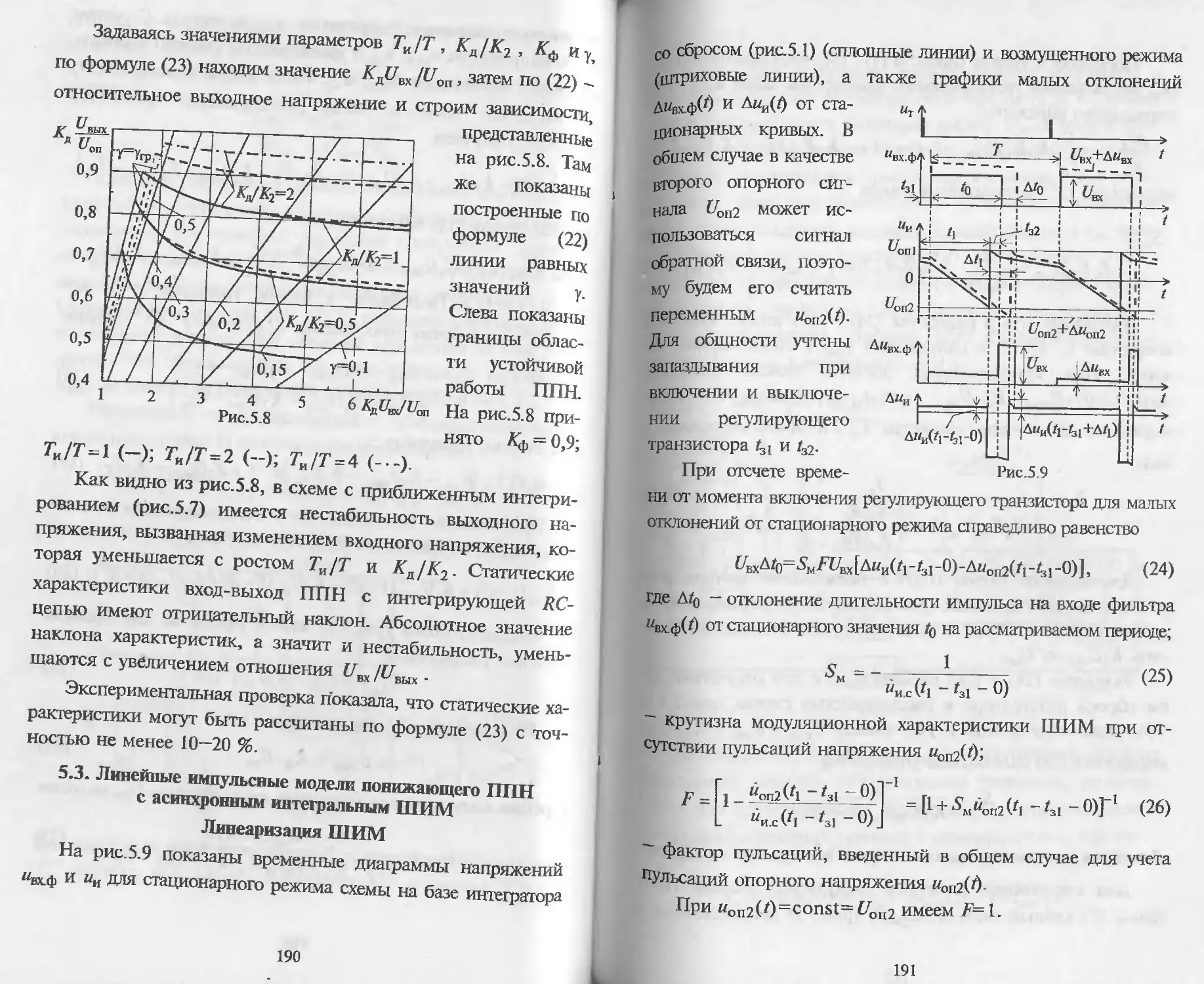
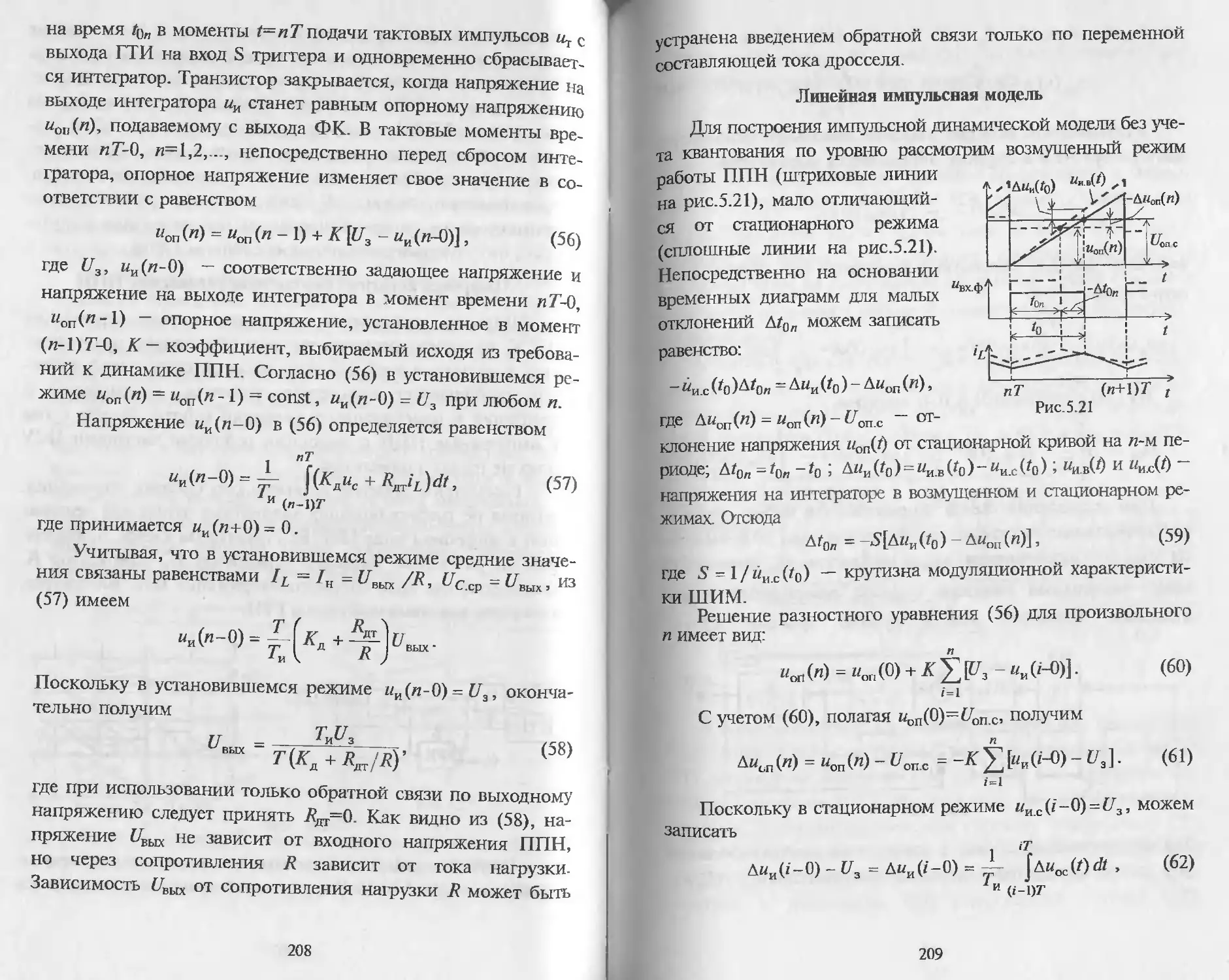
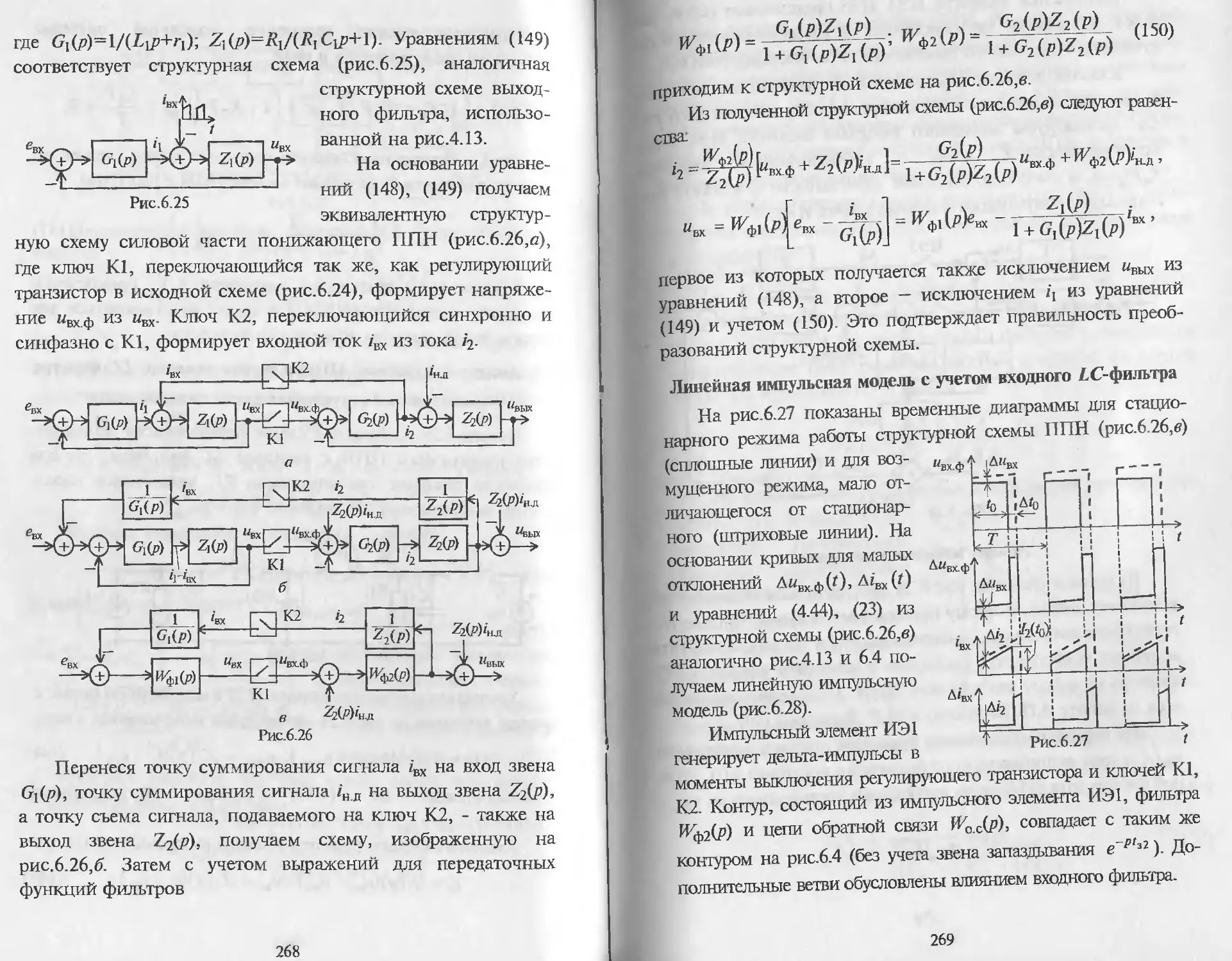
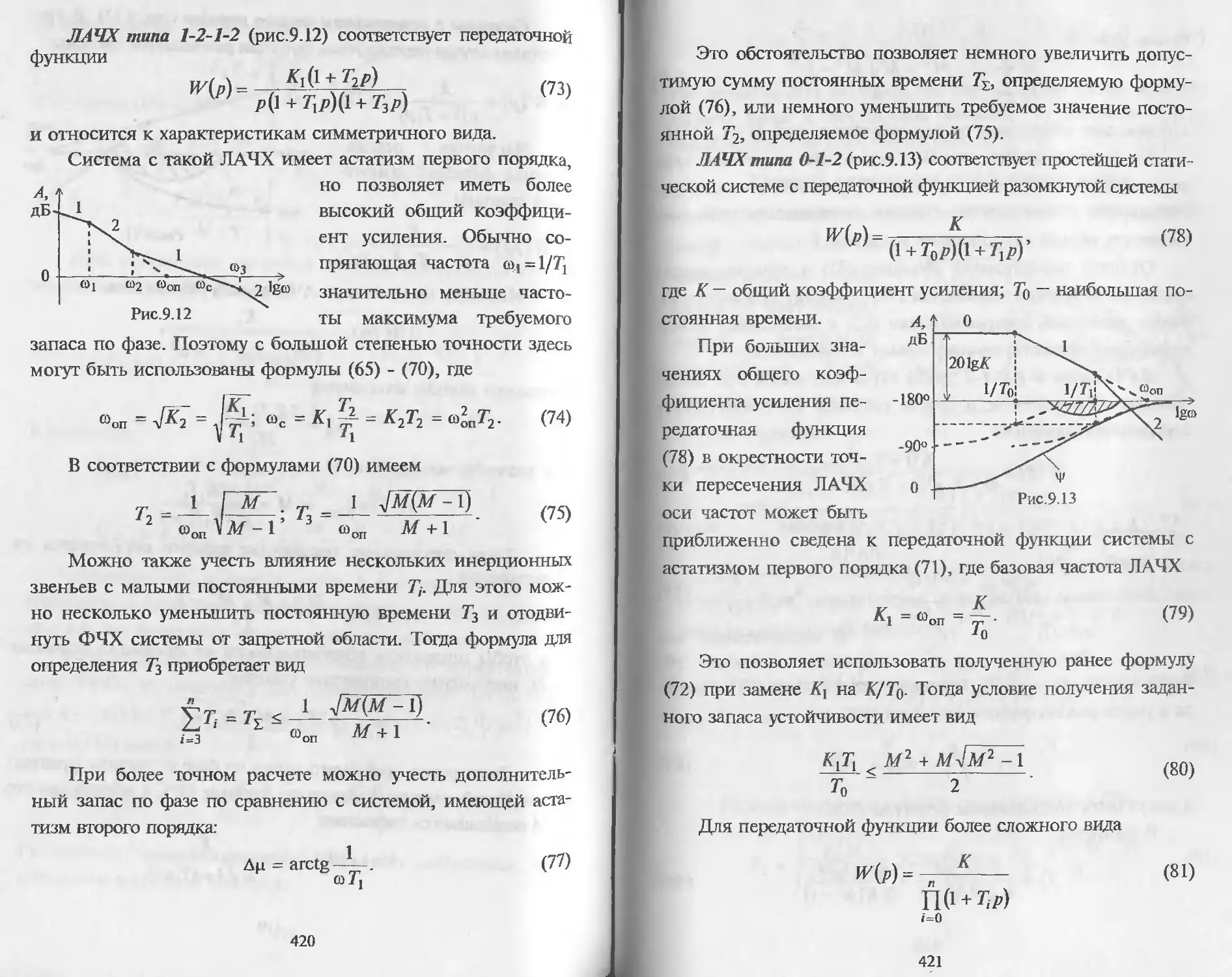
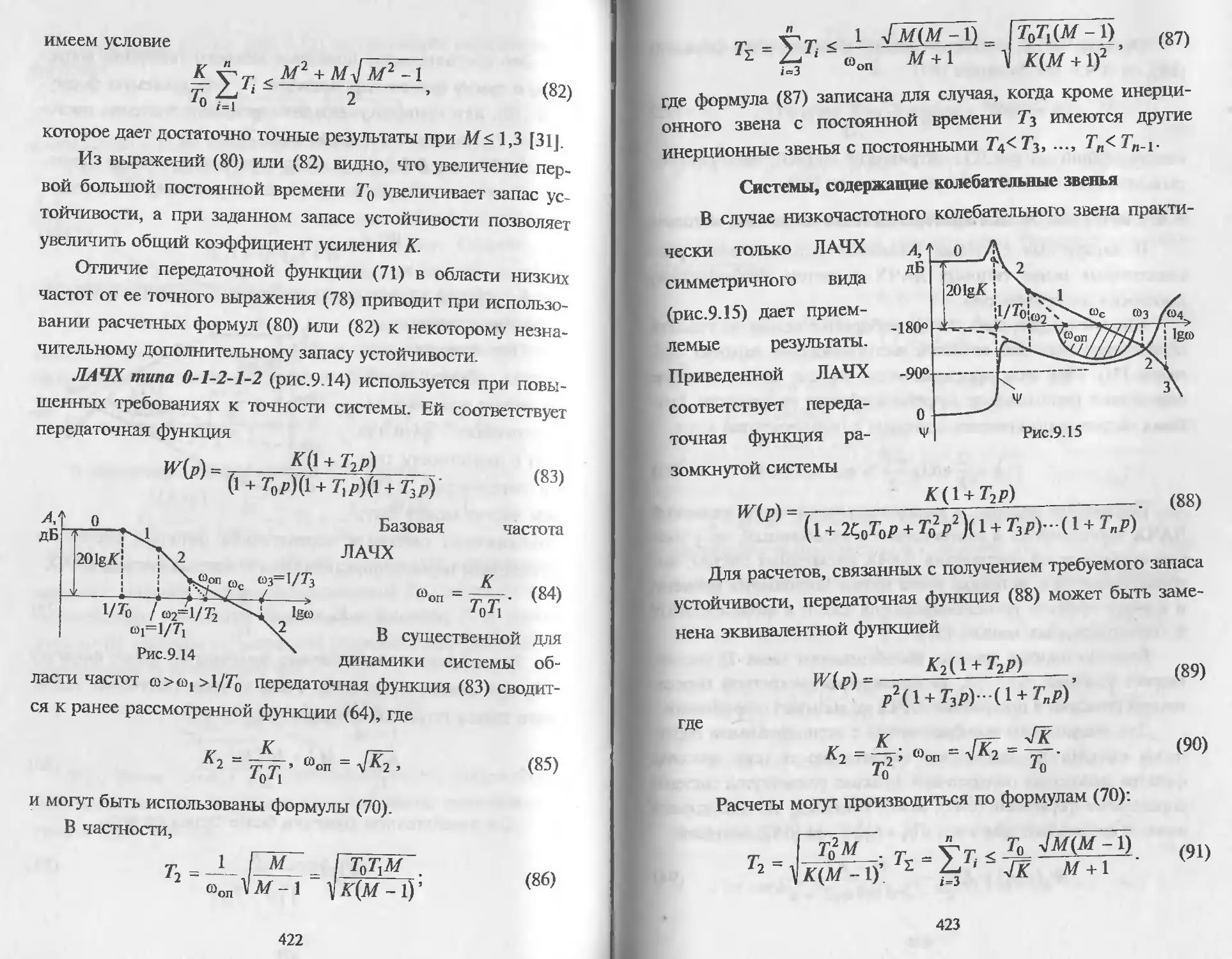
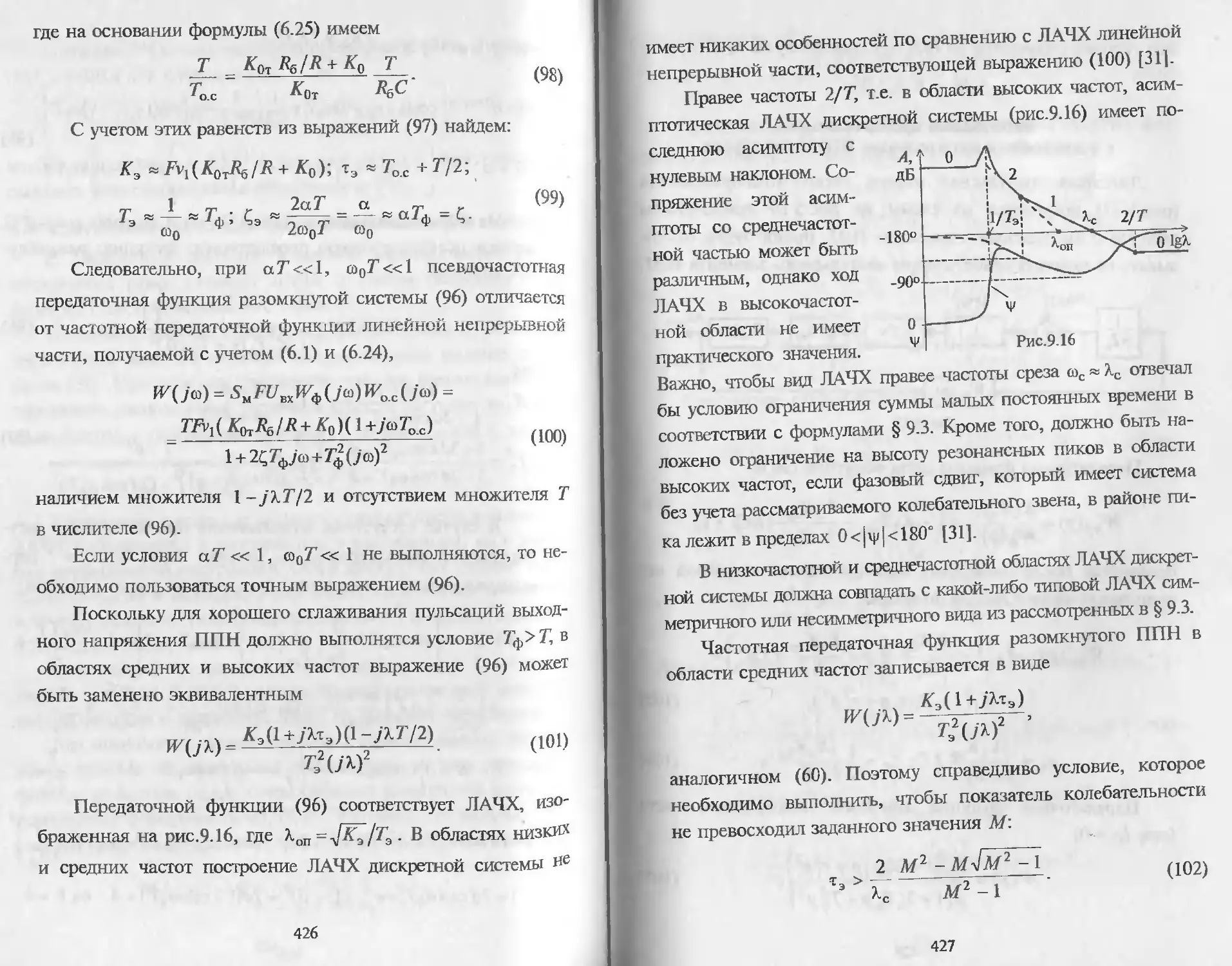
Текст
Г .А.Белов
ДИНАМИКА 3
ИМПУЛЬСНЫХ
ПРЕОБРАЗОВАТЕЛЕЙ
библиотечка Gambitg
Г .А. БЕЛОВ
ДИНАМИКА
ИМПУЛЬСНЫХ
ПРЕОБРАЗОВАТЕЛЕЙ
ЧЕБОКСАРЫ 2001
УДК 621.316.722
Б 43
Рецензент
А.Г. Иванов, зав. лабораториями ОАО «ВНИИР», д-р
техн, наук, с.н.с.
Белов Г.А.
Б 43 Динамика импульсных преобразователей. Чебоксары:
Изд-во Чуваш, ун-та, 2001. 528 с.
ISBN 5-7677-0451-1
Изложены основы теории импульсных преобразовате-
лей с замкнугыми системами управления на базе широт-
но-импульсной модуляции. Обоснованы точные нели-
нейные и линейные математические модели преобразо-
вателей, на их основе развиты методы расчета процессов,
анализа устойчивости и особых режимов работы; даны
методики расчета схем и синтеза систем управления.
Для студентов, аспирантов, преподавателей вузов,
научных работников и инженеров.
Ответственный редактор: д-р техн, наук, профессор
А.А. Афанасьев
УДК 621.316.722
Б 43
ISBN 5-7677-0451-1 © Белов Г.А., 2001
ПРЕДИСЛОВИЕ
Книга посвящена математическому моделированию и
исследованиям динамики импульсных преобразователей по-
стоянного напряжения (ИППН) — одного из наиболее рас-
пространенных классов устройств силовой электроники.
Многие методы исследований динамики, разрабатываемые
для этого класса устройств, без принципиальных трудностей
переносятся на управляемые выпрямители, непосредствен-
ные преобразователи частоты и некоторые другие классы по-
лупроводниковых преобразователей электроэнергии.
В.П. Шипилло, А.Д. Поздеев и их ученики были одними из
первых, кто внедрял точные математические методы в иссле-
дования динамики ИППН. Было показано, что ИППН пред-
ставляют собой особый, малоизученный класс нелинейных
дискретных систем (НДС), требующий для своего исследо-
вания целого комплекса математических методов, разрабаты-
ваемых в математике, теории автоматического управления,
теории колебаний, теории бифуркаций и других областях со-
временной науки. Несмотря на то, что в общей теории НДС
уже имеются интересные и важные методы исследований и
результаты, она ещё находится в состоянии становления и
достаточно быстрого развития.
Для расчетов статических внешних, регулировочных и
энергетических характеристик устройств силовой электрони-
ки широкое распространение получили приближенные ма-
тематические соотношения, основанные на ряде идеализа-
ций, например, связанных с методом усреднения. К сожале-
нию, некоторые из этих идеализаций при расчете динамики
оказываются недопустимыми. Однако обучение инженеров
происходит по литературе, в которой рассматривается
3
статика, а динамике устройств силовой электроники почти
не уделяется внимания. Обычно без предварительной теоре-
тической проработки не оправдывают ожиданий попытки
решать все вопросы при экспериментальном исследовании и
наладке преобразовательных устройств. Кроме того, такой
чисто эмпирический подход связан с большими материаль-
ными затратами, требует много времени и большого опыта
экспериментальной работы.
Для многих молодых специалистов и студентов харак-
терно увлечение чисто описательным подходом к рассмотре-
нию режимов работы преобразовательных устройств и отсут-
ствие навыков их математического анализа. Поэтому в книге
достаточно подробно даются математические выкладки, что
облегчит её использование для самообразования молодыми
специалистами и аспирантами.
Статические режимы в книге рассматриваются как част-
ные случаи динамических режимов. Достаточно подробное
рассмотрение в книге методов расчета статических характе-
ристик ИППН и параметров их силовой части, по мнению
автора, оправдано тем, что позволяет более осознанно под-
ходить к анализу динамики, облегчает выбор диапазонов из-
менений параметров схемы при исследованиях динамики.
Основой книги служит докторская диссертация автора [2j,
которая, как оказалось, не потеряла актуальности и в настоя-
щее время. Изложение некоторых вопросов расширено и до-
полнено результатами, полученными автором совместно с уче-
никами М.Ю. Мочаловым, М.Е. Кутовым, Г.В. Малининым, а
также опубликованными результатами других авторов.
Автор приносит глубокую благодарность к.т.н.
В.А. Баймулкину и инженеру Н.И. Григорьевой, оказавшим
большую помощь в подготовке книги к печати.
4
ВВЕДЕНИЕ
Наиболее широко распространены на практике следующие
группы схем силовой части импульсных преобразователей по-
стоянного напряжения (ППН):
1) однотакгные преобразователи постоянного напряжения
без гальванического разделения входных и выходных цепей, к
которым относятся понижающие, повышающие и инверти-
рующие импульсные ППН, называемые также импульсными
регуляторами напряжения (ИРН);
2) однотактные ППН с трансформаторным разделением
входных и выходных цепей (транзисторные преобразователи с
прямым и обратным включением выпрямительного диода);
3) импульсные ППН, построенные по схеме «высокочас-
тотный автономный инвертор-выпрямитель».
Подобные преобразователи применяются в качестве источ-
ников вторичного электропитания (ИВЭП) разнообразной ра-
диоэлектронной и электротехнической аппаратуры и различных
технологических установок (электронно-лучевых, лазерных,
сварочных). Повышение рабочей частоты ППН позволяет
уменьшать их массу и объем, улучшать динамические характе-
ристики, снижать расход электротехнической стали и меди.
Особенно интенсивно развиваются высокочастотные транзи-
сторные преобразователи, в которых рабочая частота доходит
до сотен килогерц.
Непрерывное расширение областей применения импульс-
ных ППН сопровождается возрастанием требований к их пара-
метрам. Это ставит перед теорией новые, все усложняющиеся
задачи, выявляет недостаточную проработку ряда важных тео-
ретических проблем. К ним в первую очередь относятся вопросы
динамики преобразователей. Вопросы динамики являются од-
ними из основных как при традиционных методах проектиро-
вания импульсных ППН, так и в случае использования САПР,
представляющих собой многоэтапный иерархический процесс.
Однако в настоящее время недостаточно разработаны динами-
ческие модели импульсных ППН, методы анализа устойчивости,
расчета динамических показателей качества, анализа нелинейных
колебаний, возникающих при нарушении устойчивости.
5
С целью расширения круга проектных задач, передаваемых
для выполнения на ЭВМ, предварительно необходимо прово-
дить тщательное исследование динамических режимов работы
и характеристик импульсных ППН с замкнутыми системами
управления, разработку частных специализированных методик
и алгоритмов расчета.
Специализированные методики и алгоритмы широко при-
меняются при проектировании импульсных ППН, особенно на
начальных этапах, которые обычно неоднократно повторяются.
Они могут служить эффективным дополнением к универсаль-
ным программам анализа электронных схем, сокращая число
просматриваемых при анализе вариантов, помогая обнаружи-
вать грубые ошибки, выбрать более экономичный метод расче-
та, облегчая применение универсальных программ на заключи-
тельных этапах проектирования.
Известно, что в системах уравнений, описывающих плохо
изученный процесс, приходится учитывать большое количество
второстепенных на первый взгляд факторов (малых постоянных
времени), следствием чего, как правило, являются относитель-
но высокий порядок системы и ее жесткость. Это затрудняет
численное интегрирование системы уравнений. Специализиро-
ванные методики позволяют быстро выяснить влияние различ-
ных факторов на динамику ППН.
В данной работе рассматриваются специализированные ме-
тодики расчета импульсных ППН.
Синтез системы управления импульсными ППН осуществ-
ляется при заданных схеме и параметрах силовой части, яв-
ляющейся объектом управления. В связи с этим анализ и рас-
чет силовой части ППН являются важным этапом, предшест-
вующим синтезу системы управления и оказывающим сущест-
венное влияние как на этап синтеза системы управления, так и
на динамические характеристики импульсного ППН с замкну-
той системой управления.
Основные допущения, принятые при анализе
При выводе выражений для мгновенных значений токов
и напряжений на элементах схем падение напряжения на
6
включенном полупроводниковом приборе учитывается кусоч-
но-линейной аппроксимацией прямой ветви вольт-амперной
характеристики (она заменяется полупрямой, проходящей через
точку и =Unop на оси напряжений с наклоном, соответствую-
щим дифференциальному сопротивлению; t/nop — пороговое
напряжение), нелинейность трансформаторов и реакторов не
учитывается. При рассмотрении основных процессов в силовой
части принимаем последовательную схему замещения реакто-
ров, не учитываем индуктивности конденсаторов, емкости ре-
акторов и трансформаторов. Указанные паразитные параметры
вызывают возбуждение быстрых колебательных переходных
процессов в моменты переключений полупроводниковых при-
боров, время затухания которых составляет незначительную
часть периода Т. Эти колебания являются одной из причин ге-
нерации радиопомех в преобразователе, приводят к увеличению
пульсаций выходного напряжения, но в большинстве случаев
не оказывают существенного влияния на основные процессы в
ППН. Предполагаем, что на входе ППН действует идеальный
источник напряжения UBll.
Полагаем, что нагрузка импульсного ППН в общем случае
может быть представлена в виде параллельно соединенных ак-
тивного сопротивления R и источника тока Введение ис-
точника тока /н д(0 позволяет учесть влияние быстрых измене-
ний тока нагрузки на процессы в ППН, а также влияние вход-
ного тока второго звена фильтра при использовании двухзвен-
ного £С-фильтра.
1. ОСНОВНЫЕ УРАВНЕНИЯ СИЛОВОЙ ЧАСТИ
ОДНОТАКТНЫХ ПОНИЖАЮЩИХ ИМПУЛЬСНЫХ
ПРЕОБРАЗОВАТЕЛЕЙ ПОСТОЯННОГО НАПРЯЖЕНИЯ
1.1. Уравнения силовой части понижающего
преобразователя в режиме непрерывного тока
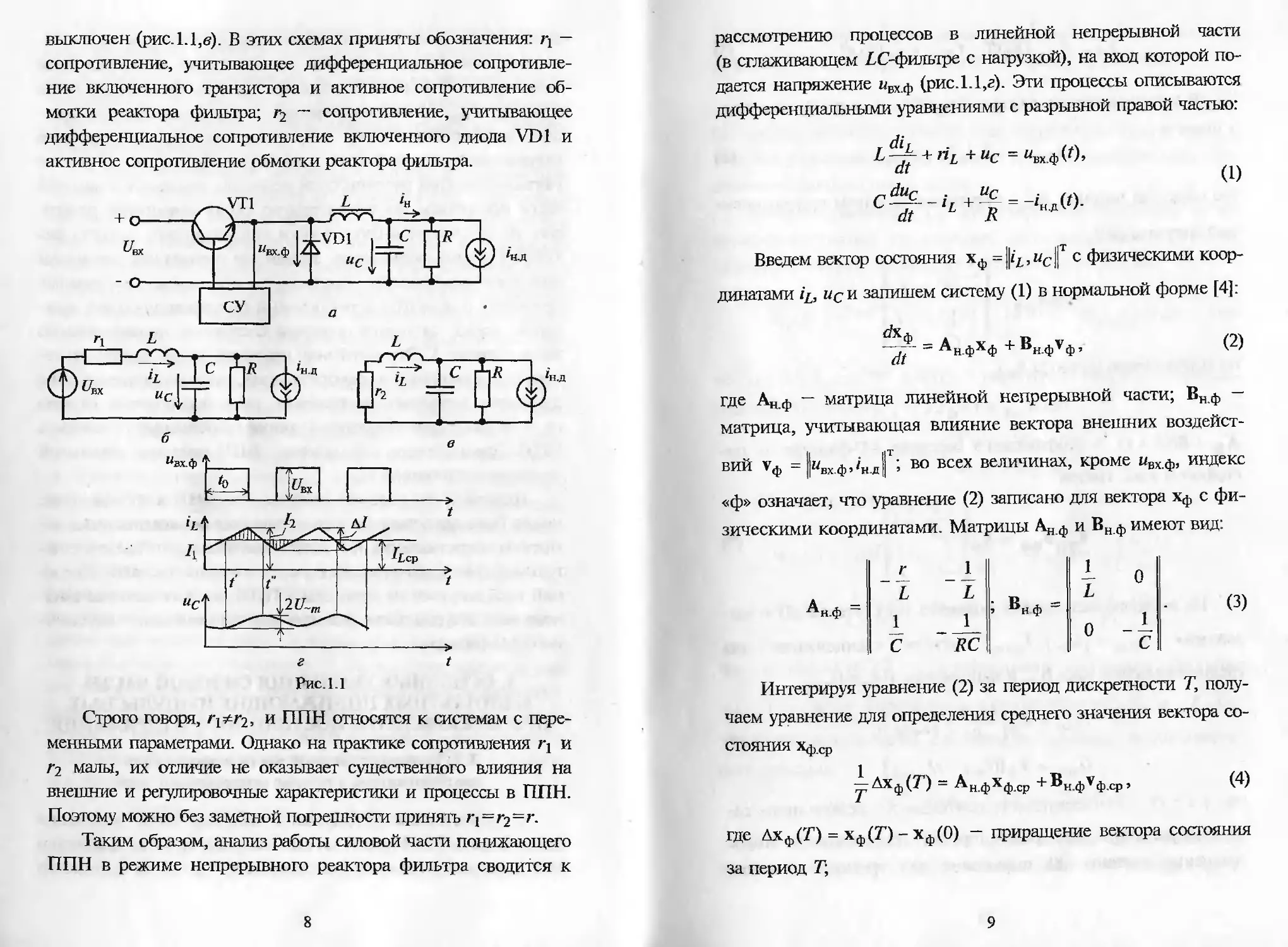
С учетом принятых допущений получаем схемы замещения
силовой части ППН (рис. 1.1,а) для интервала ф, когда транзистор
VT1 включен (рис. 1,6), и для интервала T-t^, когда транзистор
7
выключен (рис. 1.1,в). В этих схемах приняты обозначения: —
сопротивление, учитывающее дифференциальное сопротивле-
ние включенного транзистора и активное сопротивление об-
мотки реактора фильтра; г2 ~ сопротивление, учитывающее
дифференциальное сопротивление включенного диода VD1 и
активное сопротивление обмотки реактора фильтра.
Рис.1.1
Строго говоря, t\*r2, и ППН относятся к системам с пере-
менными параметрами. Однако на практике сопротивления q и
г2 малы, их отличие не оказывает существенного влияния на
внешние и регулировочные характеристики и процессы в ППН.
Поэтому можно без заметной погрешности принять г1=г2=к
Таким образом, анализ работы силовой части понижающего
ППН в режиме непрерывного реактора фильтра сводится к
8
рассмотрению процессов в линейной непрерывной части
(в сглаживающем £С-фильтре с нагрузкой), на вход которой по-
дается напряжение ц(Хф (рис. 1.1,г). Эти процессы описываются
дифференциальными уравнениями с разрывной правой частью:
1 л + "с = "«,«М
я
„ аис . ис
Введем вектор состояния хф = ||/л,пс|т с физическими коор-
динатами /£, и с и запишем систему (1) в нормальной форме [4J:
= АНфХф + ВНфУф, (2)
где Ан ф — матрица линейной непрерывной части; Вн ф —
матрица, учитывающая влияние вектора внешних воздейст-
вий ¥ф = |ивх.ф,/н.д||Т; во всех величинах, кроме пвхф, индекс
«ф» означает, что уравнение (2) записано для вектора Хф с фи-
зическими координатами. Матрицы Ан ф и Вн ф имеют вид:
Г 1 0
~ L L L V
^н.ф 1 ' 1 > ф 0
С RC С
(3)
Интегрируя уравнение (2) за период дискретности Т, полу-
чаем уравнение для определения среднего значения вектора со-
стояния Хф ср
^АХф(Т’) = АцфХфср +Вн.ф',ф.ср> (4)
где АХф(Г) = хф(Г) - хф(0) - приращение вектора состояния
за период 7;
9
1 •* I *
хФ.сР = т /хФл; *Ф.сР = 7
1 о 7 о
(5)
В установившемся режиме ДХф(Т’) = 0, и из (4) находим
хф.ср ~ ^нфВнфУфср,
где обратная матрица А Д
получается делением присоединен-
ной матрицы [10]
^н.ф
1 1
RC L
1 г
С L
на определитель матрицы Ан ф
det Анф = (ХфЬС)'1;
К'ф = R/(R + г) — коэффициент передачи £С-фильтра на по-
стоянном токе. Имеем
Ан.фВНф А^ф
(7)
-1 г
Из векторно-матричного равенства (6) с учетом (7) и вы-
ражения v$ cp - ЦбТ^у, /адср ||т получим соотношения для
средних значений тока /£ Ср и напряжения t/c.cp=t4bix:
Г — F f^BxY , т
1L.cp лф п ’’’ун.д.ср ,
к п / (В)
^вых “ ^фО^вхУ ~~ ^Н.Д.Ср)’
где у — tQ/T — относительная длительность включенного со-
стояния регулирующего транзистора VT1. Подставляя во второе
уравнение системы (8) выражение для среднего значения
10
дополнительного тока нагрузки /и.дср, найденное из первого
уравнения (8), приходим к широко известному равенству
UBba=U^-rln, (9)
где среднее значение полного тока нагрузки /н=4.ср в связи с
тем, что в установившемся режиме среднее значение тока кон-
денсатора фильтра равно нулю.
Решение уравнения (2) для очередного интервала вклю-
ченного состояния транзистора, начинающегося в момент
времени t=nT, согласно [3] определяется формулой
хф(0 = еА^(/-"Г)Хф(иТ) + |еА“*('-9)Вн.фУф(8)</&, (10)
пТ
где п = 0,1,2,...; еАнф/ = Ф(Г) — переходная матрица непрерыв-
ной линейной части,
||Фц(0 Ф12(0||
ф(/)= - (11)
|ф21(0 Ф22(0|
Элементы этой матрицы:
Ф11(0 = 51Ю + («-т)—Ф12(0 = -|^;
\ L J Од /7 Од
ф21(') = 7^; ф22(') = ^« + fa-ъг]—’
С соо (. КС J <и0
где а=(г/_£+1/7?С)/2 — коэффициент затухания фильтра;
ш0 = ^1/7ф-а2 - собственная частота фильтра; Тф = ^КфЬС
— постоянная времени АС-фильтра; введены вспомогатель-
ные функции
Ст| (/) = e~at sin о0Д (?) = e~al cos соot.
На практике часто имеют место случаи, когда изменения
входного напряжения и дополнительного тока нагрузки /11Д за
11
период Т малы. Тогда функции «вх(0 и /нд(0 можно аппрок-
симировать ступенчатыми кривыми, которые изменяются
скачком в дискретные моменты времени пТ, а на интервалах
пТ <t <(«+1)7' остаются равными значениям ивх(«7+0),
/н.д(«7' +0)- С учетом сказанного и правил интегрирования
матричной экспоненты [3] интеграл в выражении (10) пред-
ставляется в виде
лТ
Ън.фУф(пТ) = Вф(/-«7>ф(«Т),
(12)
где Вф(/) — матрица, учитывающая влияние внешних возму-
щений на решение уравнения (2). Преобразуя левую часть
последнего равенства, находим
Вф(0 = Ан'ф[Ф(0 - 1]В„ ф =
^Фп(0 ^ф1г(0
^Ф21 (0 ^ф2г(0
(13)
где
к.
= l-^i(0+ -Д=--С —
Фп R l-Ди J Г
<л(0
₽
*ф12(0 = W> = *Ф 1 - ’
*t22(»=-v ;
с] = ^L/C/R — коэффициент нагрузки; Qo = ^L/C/г— доб-
ротность фильтра без учета затухания, вносимого сопротив-
лением нагрузки R; Q = а7ф; р = и0Тф — относительные ко-
эффициенты затухания частоты фильтра; 1 — единичная
матрица размера 2x2.
Теперь формула (10) примет вид
хф(0 = Ф(Г - пТ)хф(пТ) + Вф(1 - пТ)уф(пТ) . (14)
12
Решение уравнения (2) на интервале пТ+t$<t <(л +1)7’,
на котором транзистор выключен, записывается аналогично (14):
хф(О = Ф(?-«7’-^о)хф(и^ + t^ + K^t-nT-t0)v^nT + Г0),(15)
где Уф(иТ + /0) =|| 0, гн.д(п7’)|т.
Подставляя в (15) t = (п + 1)7 и определяя значение
Хф(пТ+ t0) из (14) при t-пТ+tQ, получаем разностное
уравнение
Хф[(и + 1)7] = Ф(7)хф(п7) + Ф(7 - Г0)Вф(Г0)Уф(«7) +
+ В(7-/0)Уф(л7 + Г0),
где учтено свойство переходной матрицы, согласно которому
Ф(7 - ?0)Ф(/0) = Ф(7).
Пользуясь равенством (12), можно получить соотношение
ФОг)Вф(^) ~ Вф(^1 + ^г) ~ ®ф(^г)>
позволяющее свести умножение матриц Ф(^) и Вф(^) к сум-
мированию двух значений матрицы Вф(?) и упростить вычис-
ления. С учетом этого соотношения уравнение (16) преобра-
зуется к виду
хф[(« + 1)Л = Ф(ЛХФ(«П + 1вф(7) - Вф(7 - Го)]уф(и7) +
+ Вф(7-?о)Уф(п7 + /о). (17)
-_____________.______________________________________-—
Разностное уравнение (17) представляет собой точную
динамическую модель силовой части -Понижающего ИСН.
При постоянной длительности tG включенного состояния
регулирующего транзистора уравнение (17) линейно, что по-
зволяет просто рассчитывать переходные процессы в ра-
зомкнутой системе для различных законов изменения воз-
мущений ивх(»7), 1кл(пТ).
13
1.2. Уравнения силовой части понижающего преобразователя
с учетом сопротивления конденсатора фильтра
Согласно литературным данным последовательное со-
противление г с схемы замещения электролитических кон-
денсаторов лежит в пределах (4—11) 10'3 Ом и, следовательно,
не менее чем на два порядка меньше сопротивления нагруз-
ки R. При использовании пленочных, бумажных и керамиче-
ских конденсаторов это отличие еще больше.
Влияние сопротивления гс на работу преобразователя
заключается в увеличении пульсаций выходного напряжения
и появлении отрицательной обратной связи по току конден-
сатора в схеме с отрицательной обратной связью по выход-
ному напряжению.
Для схемы замещения при включенном транзисторе с
учетом сопротивления г с (рис. 1.2) справедливы уравнения:
di R
L4r + (r + rc^iL + = и»ф(г) + (гсИ)'нл(0;
и! 4-
(18)
rduc R . 1 R
с~л ~+ =
_ - (ЛРс)'! + С»)
-К + rC
где rc\\R = Rrc/(R + rc).
Рис 1.2
Дифференциаль-
ные уравнения (18) и
уравнение выхода
(19) запишем в мат-
ричной нормальной
форме:
Хф АНфХф +ВНфУф, (20)
ивых = ^н.фХф — 7с)*нд(0> (21)
14
где
_ г + rc|p? _ R
L L(R + rc)
R ___ 1
С(А + гс) С(А + гс)
>сИ
L
R
C(R + rc)
R
R + rc
(22)
Собственные значения матрицы А.и ф, составляющие ее
спектр, определяются из характеристического уравнения
det(AH<t) -pl) = О,
преобразующегося к виду
р2 + 2а р + — = 0,
т2
;Ф
(23)
где а — коэффициент затухания; 7ф — постоянная времени
фильтра:
= (25)
«Гф = (Л+ rc )/(« + <•).
Из уравнения (23) имеем корни
р12=-а±>0, (26)
где соо = —- - а2 — собственная частота £С-фильтра.
W
Для определения функции от матрицы Ф(1) = еАнф( най-
дем интерполяционный полином g(p) первой степени матрицы,
15
принимающий на спектре матрицы АНф те же значения, что
и функция ер1 [3]:
g(p) = ePi‘ + ePi' Р~Р>
Pi ~ Pi. Рг~ Pi
После преобразований с учетом (26) получим
, . _a/(sinm0/ а .
g(j>) = е “-------- j7 + cos£o0/ + — stncoo/
\ % и0
Подстановка р=Анф в g(p) дает искомую функцию от
матрицы Ан ф:
Ф(/) = А*' = ^(Анф) = Ха1(0Анф +
W + - о,(0
®о
1,(27)
где 1 — единичная матрица размера 2x2. Вспомогательные
функции Ст](/) = е““'sinm0/, ^L(0 = e‘‘a'cos<j)0Z отличаются от
входящих в выражение (11) учетом сопротивления гс.
На основании (27) имеем элементы матрицы Ф(():
Фц(0 = £1(0 + «-
r + rc||/?W0.
£ ) соо
ф,,(/) = ---------gift); ф, (/) = - R______
L(R + rc) соо C(R + rc) соо
(28)
Фи(0 ~ £1(0 +
1 £1(0
С(Д + гс)] о)0
Преобразуя различные формулы, используемые при ана-
лизе динамики ИППН, полезно учитывать тождество, сле-
дующее из (24):
a r + R\\rc
L
_____1 _
С(7? + rc)
(29)
Соотношения (14) — (17) с учетом различий в выраже-
ниях для матрицы Ф(1) при гс = 0 и гс # 0 остаются справед-
ливыми и при гс * 0.
16
При исследованиях и расчетах на ЭВМ добны сравнения,
включающие в себя следующие относительные величины:
_ ^6f£ . Y _ ис v _ WBX _ гн.д^б /->л\
*1 к ТТ ’ 2 К II ’ 1 U ’ 2 КП’ *
АфОиб лфОьб t/6 ЛфО^б
где /?б и — базовые сопротивление и напряжение;
^ф0 = /?/(7? + г) — коэффициент передачи ZC-фильтра на по-
стоянном токе при гс=0. Тогда новые векторы состояния
х = || Х],х2 ||т и внешних воздействий v = || v]5v2 ||т связаны с
векторами Хф и уф с физическими координатами:
х = Похф; v = П^ф, (31)
где матрицы По и П1 перехода к относительным координа-
там имеют вид:
Поскольку производная вектора состояния по относи-
тельному времени т = t/T ф с учетом (31) определяется выра-
жением
Jx ^ф
х = , = ГфП0
ах at
уравнение (20) преобразуем к виду:
х = AHx + BHv,
(33)
где Ан=ТфП0АНфПп‘; Вн =ТфП0ВнфП;1; -
постоянная времени ТС-фильтра; обратные матрицы
17
1
о
Щ> =
Офо^У Хф0£/б
У- О
*ф<А
1
иъ
фО
Перемножая матрицы
ные параметры, получаем
учетом (22)
и вводя относится ь-
АфО
Ан -2ф
, (34)
0
=
о
о
1
о
О 1
о
с
о
£
О
о
Ql /А'ф
^-о
О
1
1
Дф
5ф
Вн =
Лф0
ВН.Ф
фО
^фО^б
Кфо
I Со
\/АФ
^фО
\'Лф
,(35)
О
1
О
О
1
О
о
где относительные параметры определяются следующим образом:
4б -
R + гс
^=~ЁТ7;ГСо = Гс
' _ R
ф0' R +г
Заметим, что определитель матрицы Ан
detAH
ЛфО „
+-F/M+tl = ^p+^-
Лф Лф p R + r<
+11 = 1,
=^q+
это упрощает выражение для обратной матрицы
18
Афр
д/^ф <7б
/Аф **фО ^Со
оГ~ -ДГ
(36)
Решение уравнения (33) для очередного интервала вклю-
ченного состояния транзистора, начинающегося в момент вре-
мени т = итп, определяется формулой, аналогичной (14):
х(т) = А(т- итп)х(итп) + В(т- лтп)у(ятп), (37)
где А(т) = еАнТ — переходная матрица £С-фильтра; rn=7/7^ —
относительный период дискретизации; В(т) — матрица, учиты-
вающая влияние вектора v(mn) = || Vj (итп), v2(mn)||т на решение.
Согласно (10) имеем
В(т-итп)= JA(t-S)JSBh = А„ [А(т - итп) - 1]Вн,
„Тп
где матрица А"1, как и А^, перестановочна (коммутативна) с
матрицей А (О (это очевидно из представления матрицы
А(т) рядом), поэтому
В(т - итп) = [А(т-тп) - 1]А„ВН. (38)
С учетом выражений (35) и (36) находим
> X 1 W я II Я ts ~ Лф0 06 -1 &Ql (39)
Записывая матрицы А(т) и В(т) как
А(т) =
«н(0 «и (о
«21(0 «2г(0
, В(Т) =
*н(0 *12(0
*21 (0 *22(0
19
из равенства (38) находим соотношения
*н(О = —[1 - «н(0]- «12СО; *t2(0 = ^фо 1 - «ц(0 + §-«п(О
Чб L МТ
*21 (О = 1 “ «22 (О ~ ~ «21 (01 *22 СО = - ^ф017Г [1 - «22 СО] + «21 (О
<?б IW,
дающие связь элементов матриц А(т) и В(т).
Явные выражения для элементов матриц А (т) и В (т) мож-
но найти, преобразуя матрицы Ф(г) и Вф(1) с учетом (31) и (32).
Умножая уравнение (14) слева на матрицу По, с учетом
равенств (31), (37) получаем соотношения:
А(т) = ПоФ(ОПо1; В(т) = П0Вф(/)П11. (40)
Принимая во внимание выражения (32), из (40) находим
соотношения:
«п(О «11(0 Фц(0 /?бФ12(0
А(О = — I _ •
«21(0 «22(0 —Ф21(0 *б Ф22(0 ’
*н(0 *12(0 *Ф12(0
В(О = = Лф0 1 1
*21 (0 *22(0 ^*ф21(0 Аф0 ^*Ф22(0
(41)
Тогда из (41) и (28) следуют выражения для элементов пере-
ходной матрицы А(т):
«ц(0 = Фц(0 - £(0 -
*ф0</ о(т)
Ж) Р
«12(0= ^2(0 = --^-^;
Л % р
20
, , 1 о(т)
«210) = Щ-ф21(0 = R ;
«220) = Ф22(0 = ^0) + ^ "
I лИф J Р
(42)
и элементов матрицы В (т):
мад-*6 w°=- {-ад+
ЛфО <7б
*i2o) = *Ф12(о = *фо i-ад- ад
*2iO)~ *ф21(0 = 1-ад-^;
^фО Р
*22о) = ^-*Ф22(0 = %-1 - ад - к -
«б
(43)
При гс-0 и Rq=R имеем Кф- Кфо, Qi = Qo и выражения
(43) переходят в (13).
Теперь с учетом соотношения (38) получаем равенство,
полезное для преобразовании последующих формул:
А(т2)В(г1) = A(t2)[A(tj) - 1]А‘*ВН =
= [A(T! + т2) - A^JAX = В(Т1 + т2) - В(т2), (44)
Из (37), принимая во внимание равенство (44), анало-
гично (16) получаем разностное уравнение силовой части
понижающего ППН
х[(и + 1)тп] = А(тп)х(лтп) + [В(тп) - В(т„ - x0)]v(«Tn) +
+ В(тп - т0)у(лтп + т0), (45)
где т0 = t()/Тф — относительная длительность включенного
состояния силового транзистора. В соответствии с принци-
пом работы ППН имеем
21
v(mn + To) = 110, v2(mn)||T.
Уравнение (45) называется дискретным уравнением со-
стояния силовой части ППН. В разомкнутой системе при
to = const оно решается с помощью последовательных итераций:
х(тп) = А<ЛП)х(0) + [В(т„) - В(тп - to)]v(0) + В(тп - t0)v(t0);
х(2тп)=А(тп)х(Тп)+[В(тп)-В(тп -т0)]у(тп)+В(тп -t0)v(tn +т0) =
= А2(тп)х(0) + А(тп)[В(тп)-В(тп -to)]v(0) + А(?п)В(тп -t0)v(t0)+
+ [В(тп) - В(тп - т0)]v(rn) + В(тп - т0)у(тп + т0);
JV-1
х(№п)=АЛГ(гп)Х(О)+^АЛМ-/:(гп){[В(гп)-В(гп-то)]у(Лгп) +
л=о (46)
+ В(тп - t0)v(fctn + т0)}.
Соотношение (46) иногда называется переходным урав-
нением состояния [4], матрица Алг(тп) = А(тп)А(тп)...А(тп) —
N раз
переходной матрицей состояния линейной дискретной сис-
темы. В нашем случае A7V(tn) = A(7Vrn) и соотношение (46)
вполне пригодно для расчета переходных процессов в ППН
с разомкнутым контуром управления при возмущениях со
стороны входа и выхода.
Такой же вид имеет переходное уравнение состояния для
систем более высокого порядка. Оно более удобно для вы-
числения переходного процесса, чем алгоритмы, основанные
на применении ^-преобразования [4].
Уравнение (45) позволяет сводить аналоговую силовую
часть ППН к эквивалентной дискретной системе.
В большинстве случаев ППН имеет замкнутую систему
управления с широтно-импульсной модуляцией (ШИМ)
22
импульсов на входе ZC-фильтра. В этих случаях уравнения
(16) и (45) необходимо рассматривать совместно с дополни-
тельным алгебраическим уравнением для определения дли-
тельности /0„ или т0„ включенного состояния силового
ключа на п-м интервале дискретизации. Математическая
модель ППН становится существенно нелинейной. Посколь-
ку такая система замыкается только один раз за период в
момент времени, когда происходит фиксация значения
управляющего сигнала, по своей природе система становится
дискретной.
1.3. Уравнения состояния понижающего ППН с двухзвенным
/.С-фильтром в режиме непрерывного тока
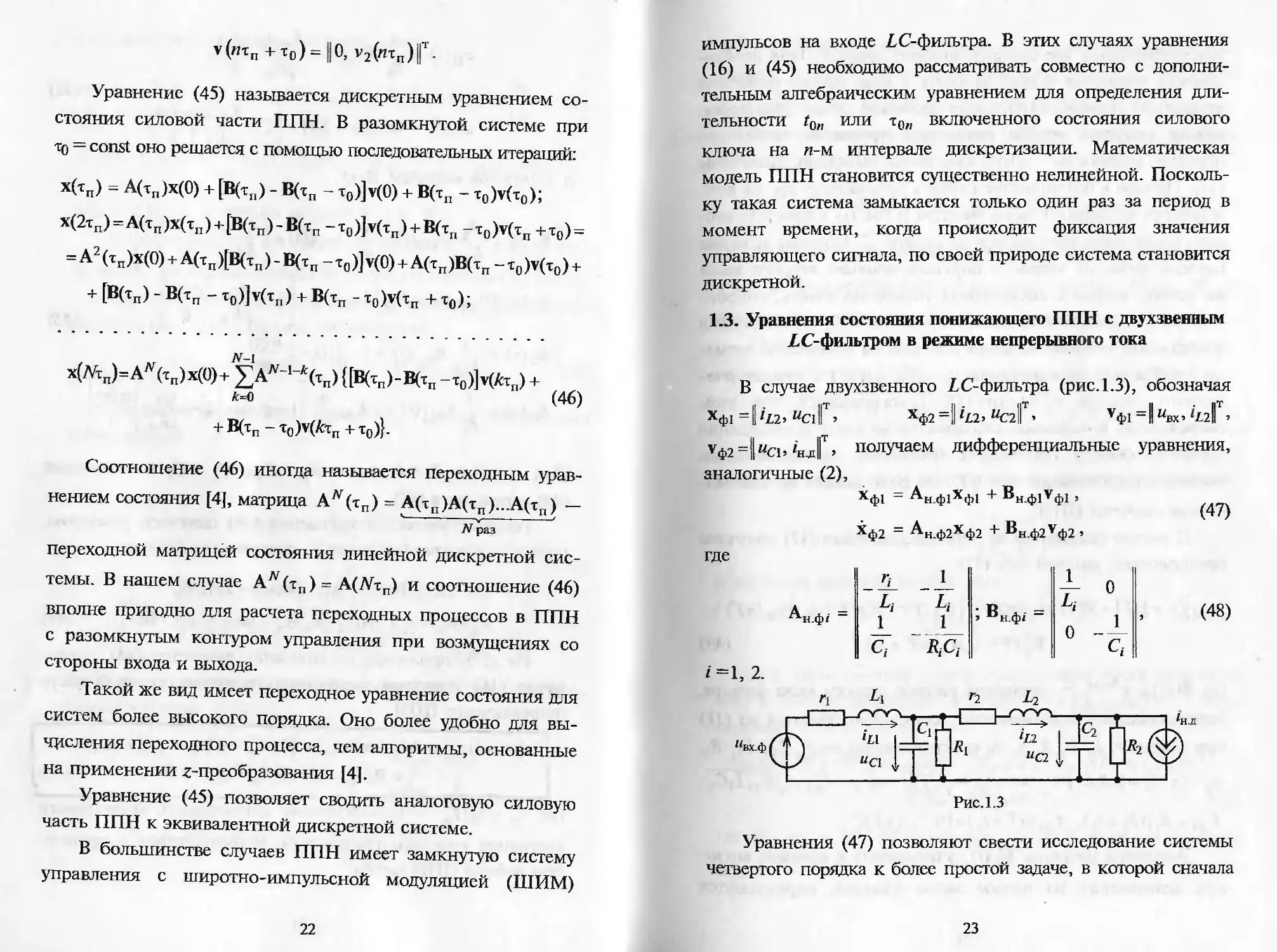
В случае двухзвенного ZC-фильтра (рис. 1.3), обозначая
Хф1 =||/Т2, “С1Г>
хф2 =11 г£2> ыСг|Г’ ¥ф1 =11 ИВХ’ Й.гГ’
Уф2 =||иС1, гнл|Т> получаем дифференциальные уравнения,
аналогичные (2),
Уравнения (47) позволяют свести исследование системы
четвертого порядка к более простой задаче, в которой сначала
23
рассматриваются две системы второго порядка. При необхо-
димости уравнения можно записать в виде одного уравнения
четвертого порядка. Используя решение этого уравнения,
можно получить точное разностное уравнение четвертого
порядка аналогично тому, как было выведено уравнение
(17). Однако в большинстве случаев напряжение мщ на кон-
денсаторе С] первого звена фильтра и ток </£ в Дросселе вто-
рого звена мало изменяются за период Т. Поэтому влияние
первого звена на второе и обратное влияние второго звена
на первое можно с достаточной точностью учесть, аппрок-
симировав кривые напряжения иС1 и тока iL2 ступенчатыми
функциями, которые изменяются скачком в моменты време-
ни t=nTи остаются равными uCi(nT), ii^nT) в течение оче-
редного периода nT<t<(n+l)T. Появляющаяся при этом
погрешность в основном сказывается на учете прохождения
через £С-фильтр гармоник с частотами, превышающими
частоту' дискретизации f - 1/Т, но мало влияет на динами-
ческие свойства ППН.
С учетом сказанного из первого уравнения (47) получаем
соотношение, аналогичное (17):
хф1[(« + 1)Т]= Ф'(Т)Хф(иТ) + [в'ф(П - В'ф(Т - 10)]тф(ИТ) +
+ в'ф(т - А))*ф(яТ + zo)> (49)
где Ф (/) = еАнф1/ — переходная матрица первого звена фильтра,
определяющаяся выражениями, которые получаются из (11)
при замене г, L, С, R, a, <dq соответственно на r\, Ь1г Q, Rb
а1 = (И /Д + и ю01 = д/У^ф1 ~al > ?ф1 - »
-^Ф1 = А/(Л +/i); уф1(л^+^о)=||о, г£2(и^)|т-
Элементы матрицы Вф(7), учитывающей влияние внеш-
них возмущений на первое звено фильтра, определяются
24
соотношениями, аналогичными (13), в которых кроме ука-
занных замен необходимо заменить g, р, Qq на
91 ~ 7 Д /С, / 7] , = СцГф!, pj = С0017ф1 и Ql = .
Решение второго уравнения (47) для интервала времени
пТ < t < (п + 1)Т аналогично (14):
хф2(0 = Ф'’(/-«ПХф2(лП + В;(/-«ПУф2(лП, (50)
где выражения для элементов матриц Ф"(^), Вф(1) получа-
ются из соответствующих элементов матриц ФД), Вф(Д
при замене в их правых частях индексов 1 на 2.
Подставляя t = (и + 1)7 в (50), находим второе разност-
ное уравнение для ППН с двухзвенным £С-фильтром:
хф2[(я + 1)7] = Ф"(7)хф2(иТ) + Вф(7,)Уф2(иТ). (51)
Объединим уравнения (49) и (51) в одно дискретное
уравнение состояния четвертого порядка с вектором состояния
хф(0 =
Хф1(0
хф2(0
и вектором внешних воздействий
Для этого сначала преобразуем правую часть уравнения
(49) с учетом равенства уф1(«7 +10) = ||0, 1£2(н7)||т. Тогда
получим
Хф1 [(« + 1)7’]= Ф'(Г)хф1 (л 7) + [вфЧ(7) - ВфЧ (7 - /0)]«вх («7) +
+ Вф*2(7)112(и7), (52)
где Вф.ДД и Вф.2(/) — первый и второй столбцы матрицы
В'ф(0-
25
Учитывая равенство Уф2(иГ) = ||мС1(пТ), /нл(иТ)||т, за-
пишем уравнение (51) как
Хф2[(л + 1)Л = Ф (Т)хф2(иТ) + Вф41(Г)Мс2(иТ) +
(53)
+ Вф,2(Т)1нд(иП,
где Вф»](0 и Вф.2(/) — первый и второй столбцы матрицы
Вос-
принимая во внимание равенства
"«(«Л = тьф1(«п; IliW = Ц1,0||Хф2(иТ);
Вф*2(П||1,0|| =
*ф12 (Л
*02(Л
*ф11(Л II
*01 (л I
Вф»2(Л Чл(пТ)
Вф*1(Л ЫС1(«Л
*Ф12(Л о
*ф22(Л 0
о о
о о
о о
о о
О *01 (Л
® *ф21(^)
Хф2(«Л
хф1(«Л
*Ф12(Л О
*Ог(Л О
о
о
О *01 (Л
О *;21(Л
О 1 хф1(пТ)
1 0 Хф2(лТ)
о
О *01(Л
о *01 (л
*Ог(Л О
*ф22 (Л О
о
Хф1(«Л
хфз(«Л
26
где 1 и 0 — единичная и нулевая матрицы размера 2x2, из
уравнений (52) и (53) получаем дискретное уравнение со-
стояния четвертого порядка:
хф[(л + 1)Т] = Ф(Г)хф(йГ) + ВфУф(лГ), (54)
где
ф'п(л ф;2(п ^ф!2 (Т) 0
Ф(71) = Ф'^Г) Ф22(Г) о ^11(П ^ф22 (^) ф^п 0 ф;2(п
о z>;21(7i Ф'21(Т) Ф22(Т)
Вф,1(7’)-Вф.1(Г 0 -'о) о в;,2(п •
Заметим, что Вф — матрица размера 4x2, в ней 0 — нуле-
вая матрица размера 2x1.
Применение уравнения (54) для практических расчетов
ограничивается его сложностью. Реальные ППН с двухзвен-
ным АС-фильтром представляют собой двух- или трехкон-
турные замкнутые системы управления. R этом случае, поль-
зуясь методом разделения движений [5], можно свести изу-
чение системы высокого порядка к рассмотрению систем
меньшей размерности и пользоваться при этом уравнениями
(52) и (53).
27
1.4. Уравнения состояния понижающего ППН
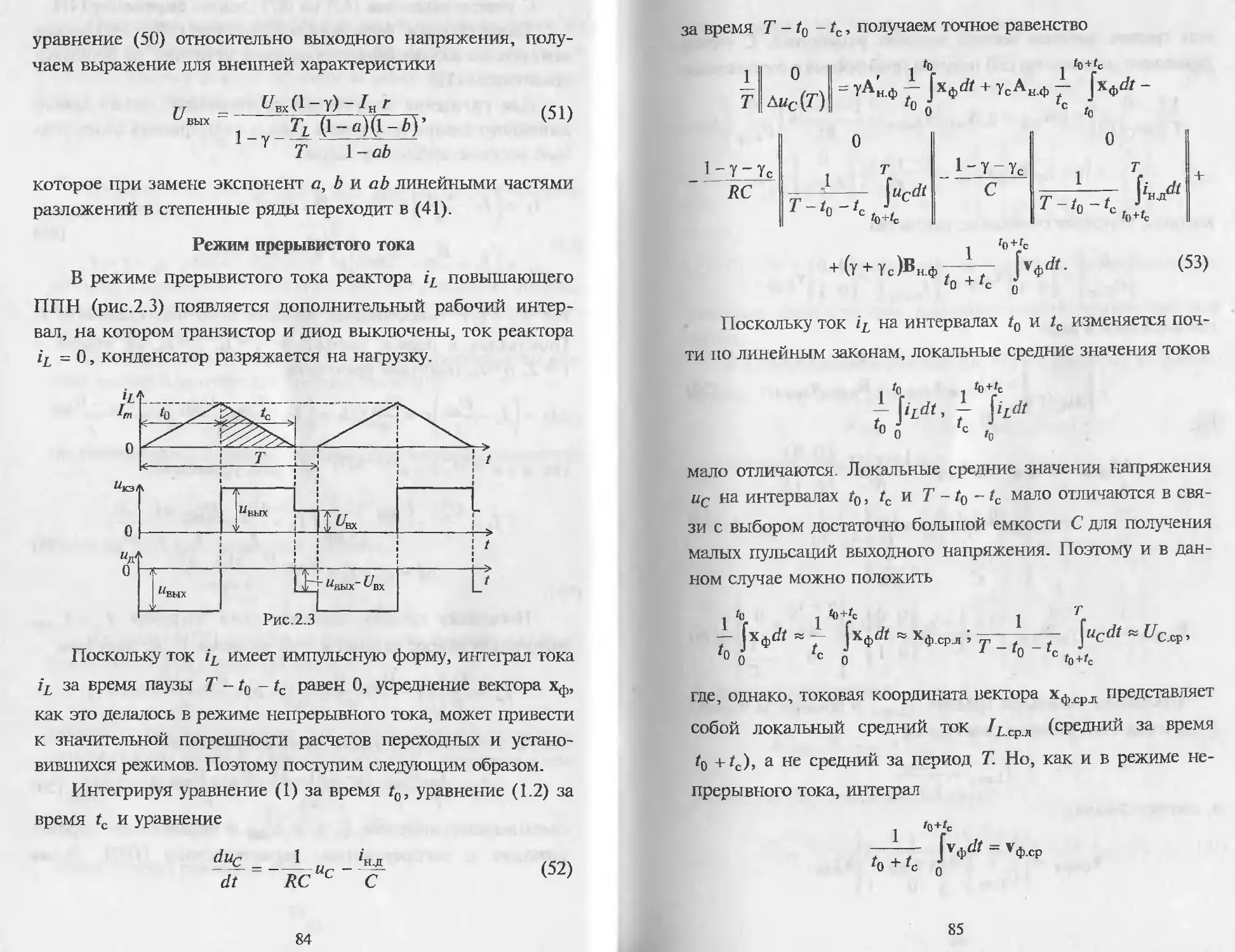
в режиме прерывистого тока реактора фильтра
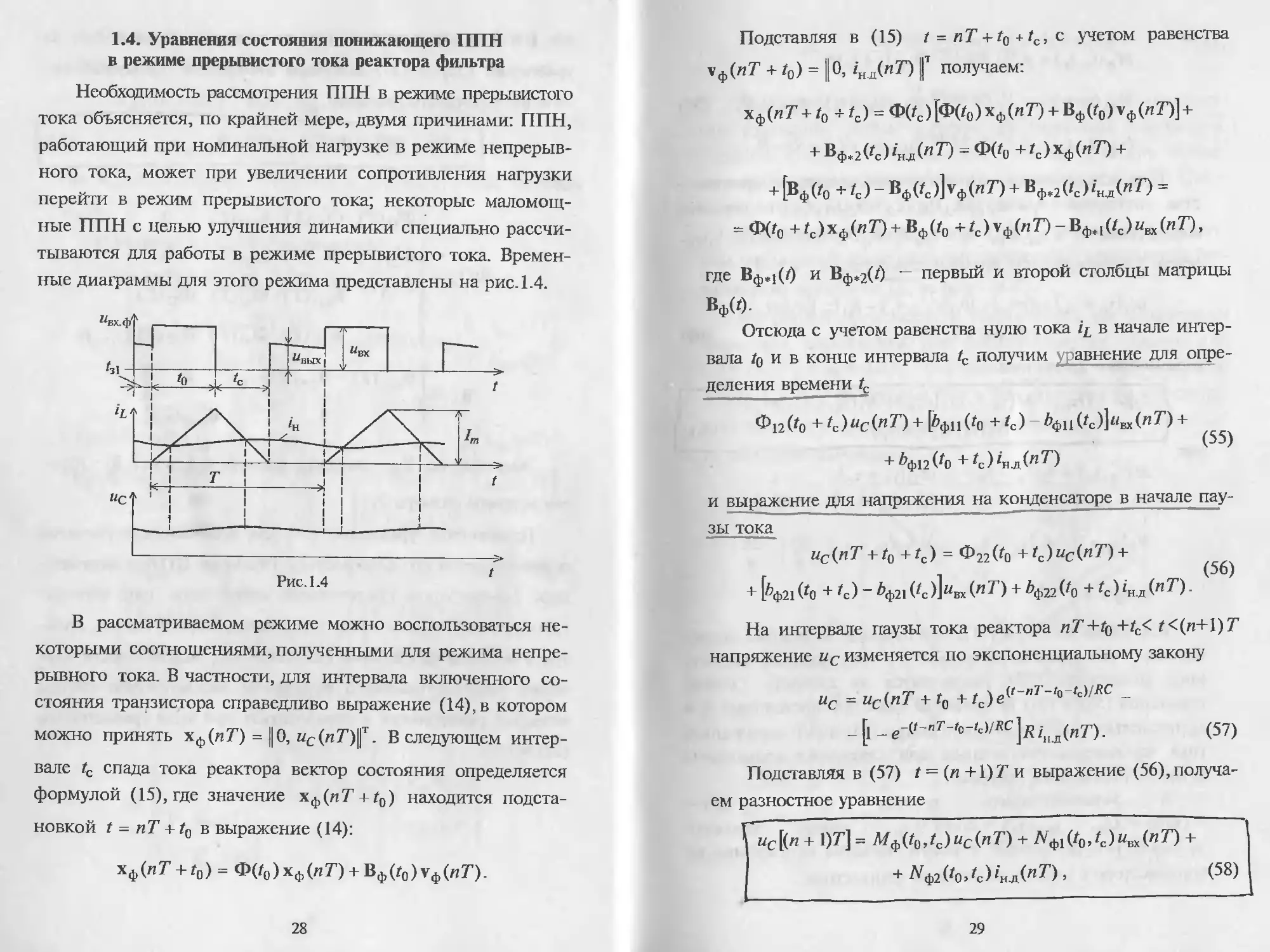
Необходимость рассмотрения ППН в режиме прерывистого
тока объясняется, по крайней мере, двумя причинами: ППН,
работающий при номинальной нагрузке в режиме непрерыв-
ного тока, может при увеличении сопротивления нагрузки
перейти в режим прерывистого тока; некоторые маломощ-
ные ППН с целью улучшения динамики специально рассчи-
тываются для работы в режиме прерывистого тока. Времен-
ные диаграммы для этого режима представлены на рис. 1.4.
Рис. 1.4
В рассматриваемом режиме можно воспользоваться не-
которыми соотношениями, полученными для режима непре-
рывного тока. В частности, для интервала включенного со-
стояния транзистора справедливо выражение (14), в котором
можно принять Хф(иТ’) = || 0, ис(«7’)||т. В следующем интер-
вале tc спада тока реактора вектор состояния определяется
формулой (15), где значение хф(пТ + г0) находится подста-
новкой t = пТ + t0 в выражение (14):
хф(иТ + г0) = Ф(10)хф(и7) + Вф(г0)у ф(пТ)
28
Подставляя в (15) t - пТ + t0 + /с, с учетом равенства
уф(пТ + t0) = ||0, 1нл(пТ) ||т получаем:
Хф(л7 + /0 +/с) = Ф(^с)[Ф(/0)Хф(лТ) + Вф(!‘0)¥ф(н7’)] +
+ Вф.2(^)/НЛ(иТ) = Ф(/0 + /с)Хф(«Г) +
+ [Вф (4) + О - Вф(/с)]уф(лТ) + Вф42(/с)/нд(иГ) =
= Ф^0+Гс)хф(и7) + Вф(^ +/с)¥ф(иТ)-Вф,1(/с)мвх(иТ),
где Вф*](/) и Вф,2(0 — первый и второй столбцы матрицы
Вф(г).
Отсюда с учетом равенства нулю тока i£ в начале интер-
вала t0 и в конце интервала tc получим авнение для опре-
деления времени /с
Ф12(#о + tc)uc(nT) + 1Лф11 (?о + *с) ~^ф11
(55)
+ ^ф12^0 + OU"7)
и выражение для напряжения на конденсаторе в начале пау-
зы тока
ис(пТ + t0+tc) = Ф22(Г0 + О«с(«Л +
г 1 (56)
+ Гф21(*0 + ^с) - ^ф21(^с)]йвх(и^) + ^ф22^0 + О гн.д (Л ^)
На интервале паузы тока реактора пТ+tQ +tc< t<(n+V)T
напряжение ис изменяется по экспоненциальному закону
ис = ис(пТ + t0 + _
- [1 - ^nTy (57)
Подставляя в (57) t — (п +1)7’ и выражение (56), получа-
ем разностное уравнение
Гмс[(лг + 1)7] = M^{t0,tc)uc(nT) + 2Уф1 (70, k) «вх (п Т) +
+ ^ф2(/0,/с)«нд(«7), (58)
29
где
Л/ф(/0,/с) = e^-f«-^cO22(r0 + rc);
A^(Wc) = e~^-^RC Ьф21(Г0 + tc) - Ьф21(/С)]; (59)
MU) = e^T~^RC [йф22(Г0 + tc) + R]-R.
При использовании относительных координат простран-
ства состояний Xj = R^ii/Кфи^, х2 =ис/Кфиб и внешних
воздействий V] =umjUb, v2 = 1НЛ^/Кфи& получаются урав-
нение для определения времени спада тока тс = /С/Тф
«12^0 + tchlfan) + [*11(х0 + xc)-*ll(xc)]vl(«xn) +
+ й12(т0+тс)т2(птп) = 0 (60)
и разностное уравнение
( х2[(п + 1)тп]=М(т0,тс)х2(птп)+^(т0,тс)в1(птп) +
_______________+ fyfro.^hki).____________________(6i)
где " ’
Мхо-хс) = А2(тп - т0 - тс)с22(т0 + тс);
^i(t0JTc)= А2(тп -т0 - тс)[/>21(т0 +тс)-й21(тс)];
ЛГ2(х0>хс) = Л2(тп -Т0
~ тс) ^22 (х0 + тс
)+?б _^б-
q J q ’
й2(т) = е^ф9Т.
Как видно из (58) и (61), при переходе из режима непре-
рывного тока в режим прерывистого тока порядок разност-
ного уравнения ППН уменьшается на единицу. Однако
уравнения (58) и (61) не линейны даже при постоянных Го и
то, поскольку согласно соотношениям (55) и (60) время спада
тока не остается постоянным при изменении координаты
ис(пТ) в переходном процессе.
В установившемся режиме при Щм(пТ) —
— const = иъх, 1ц.п(пТ) = const = /нд можно положить
мс[(л + 1)Г]=нс(лгТ)= const и найти значения напряжения да
конденсаторе в момент включения транзистора
30
<]il (f0’ )6 вх + ^ф2 (^0’ )^н.д
1 ~ ^ф(^0’*с)
(62)
Подставив в (55) uci.n'T) = «сует, получим трансцендент-
ное уравнение, решая которое для известных параметров,
внешних воздействий и заданных значений можно опреде-
лить соответствующие значения времени спада тока tc. После
этого по формуле (62) находится значение г/Суст.
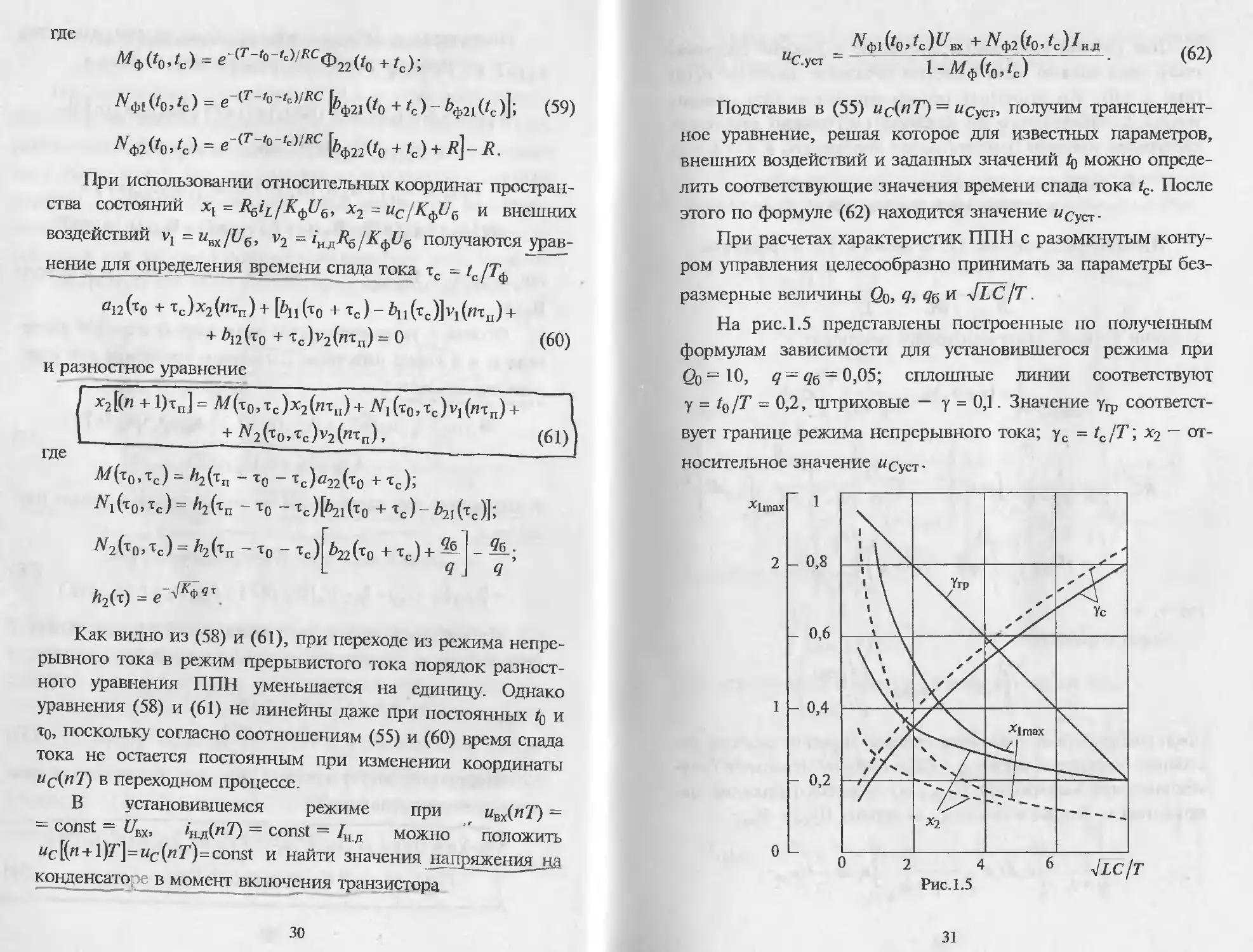
При расчетах характеристик ППН с разомкнутым конту-
ром управления целесообразно принимать за параметры без-
размерные величины <2о, д, д^ и JLC /Т.
На рис. 1.5 представлены построенные по полученным
формулам зависимости для установившегося режима при
<20 = 10, д — дб - 0,05; сплошные линии соответствуют
у = t0/T = 0,2, штриховые — у = 0,1. Значение у^, соответст-
вует границе режима непрерывного тока; ус = tc /Т; *2 — от-
носительное значение исуст
31
Для расчета переходных процессов в режиме прерыви-
стого тока должно быть известно начальное значение нс(0)
(при п = 0), что позволяет решить уравнение (55) относи-
тельно /с. После этого по формуле (58) можно рассчитать
следующее значение изменяющейся координаты ис(Т) и т. д.
Соотношения для расчетов методом усреднения
в режиме прерывистого тока
Интегрируя уравнение (2) за время + 1С и уравнение
Jz/C
dt
1 _ £н.Д
RC с с
за время Т - to - tc, получаем точное равенство
0
Лмс(П
(у + Те )А-Н.ф
г0 + ‘с
'о+'с
рфл -
о
уВн.ф т" + Ус^н-ф f
'° о го
где Ус = Ч!Т-
Здесь выражение
«Ь+Сс
f f /ХФЛ = Хф.ср.л =
0+/с 0J
Аг.ср.л
^С.ср.л
представляет собой локальное среднее значение вектора со-
стояния (среднее за время to + 0, в котором локальное сред-
нее значение напряжения ДСср л из-за малых пульсаций на-
пряжения ис близко к среднему за период UCcp = ДВЬ1Х:
32
Полагая, что дополнительный ток нагрузки /нд также
мало меняется за период Т, можем считать
I to J ‘о+1е | Т
|гн.д^ : ~ = 'Г f*н.д^ ~ Лнлср
0 О с Гс 0 с Ib+fc
С учетом сказанного полученное в результате интегриро-
вания равенство может быть приближенно записано в виде
О
Д«с(Л
О
Uc,P
(У *" Ус)Дц.фХф.ср.л
1-Y-Yc
RC
1-Y-Yc 0 -1- л/R 4- v R 0
С + У^н.ф I + Усон ф /
х Н-Д.ср 7 НЛ-Ср 1 Н.Д-Ср
tZBX
где тфср =
Н.д.ср
Учитывая очевидные равенства:
О
иСср
о
о
о
Хф.Ср.Л ’
А(.д ср
1
Уф ср >
О
О
получаем уравнение
О
1
Т &“С(Т)
___ А v । Т£ v
^н.ф.срф.ср.л “ -^н.ф.ср т ф.ср ’
где усредненные матрицы с учетом (3) имеют вид:
33
Поскольку локальное среднее /icp л и среднее за период
Т значения тока реактора связаны равенством
окончательно
получаем уравнение метода усреднения:
О
где
1
Т ^с(Т)
^н.ф.ср^ф.ср + ф.ср^ф.ср ’
(63)
А = Ал
н.ф.ср "н.ф.ср
У + У,
Y + Yc
L
1
RC
Учитывая, что в установившемся режиме кис(Т) = 0, по-
лучим равенство
V __ _А I? дг
ф.ср — "н.ф.ср"н.ф.ср *ф.ср 1
(64)
где
det А
1 f Г
н.ф.ср = 777 -7 + у + Ус ; adj А
LC\.R
н.ф.ср
1
RC
Y + Yc
L
^н.ф.ср - £6? -— + у + у,
1
RC
1
с
с
y + Yc
L
г
R
1
о
О
1
L
1
L
г
£
А“1 Ю _ | г
"н.ф.ср "н.ф.ср - I
L
R
-I
-у
34
Матричное равенство (64) эквивалентно двум скалярным:
I L.cp
+ (у + Ус)^н.дср
(65)
^вых
— + У + Ус | (fJВХУ — /ц.д ср т),
Л )
где у = tojT. На границе режима прерывистого тока, где
у + ус - 1, равенства (65) совпадают с (8).
Подставляя во второе уравнение (65)
/ндср = Ц ~ивъа/^ и решая относительно f/BbIX, находим
выражение для внешней характеристики в области прерыви-
стых токов
которое необходимо дополнить уравнением для определения
времени спада тока tc = усТ. Если учесть равенства
Il.cp = 4.Лср = 4 -^вых/^» выражение (66) получается
и из первого уравнения (65).
Оказывается, что равенство (66) вытекает не только из
уравнения (63), но может быть получено в предположении
ис ~ const и экспоненциального изменения тока на
интервалах /q и tc:
iL = (i _ е-по < t < t0,
i — l Г ^вых L-(f-%)/?i ^вых t < t < t
lL - Ля +---- e-------------’ '0 - 1 - l0 + ‘c >
\ r J r
где TL = L/r; амплитуда импульсов тока
= Ubx
r
35
a = e~to!1L. Подставляя t = t0 + tc в выражение для тока на
интервале t0 < t < t0 + tc, получаем уравнение для определе-
ния времени tc
e~‘drL - ^ВЫХ
Интегрируя приведенные выражения для тока iL на ин-
тервалах и /с, найдем равенство
' — Т — ^вх ^вых v _ ^вх ^вых -Tt
i.cp 1 Н I р
которое с учетом выражения для е 1сТ' превращается в (66).
Подставляя в уравнение для tc выражение для амплитуды
импульса тока /от, получаем уравнение
g-t/7! _ _____________6'Bbrx _________
С'вь1 + (67BX ~ 67Вых )U ~
ВЫХ \ Ba ВЫХ /\ /
откуда следует
tc = TL In 1 + ~67BM)(l~g)
(67)
67,
Если логарифм аппроксимируется линейной частью раз-
х2
ложения 1п(1 + х) = х - — + то приближенно
tr — Т,
_^BX
б^вых
а при замене экспоненты а линейной частью соответствую-
щего ряда —
tc
UBX _ /|
и 1
вых /
zo-
Таким образом, подставив выражение (67) в равенство (66),
получим уравнение для определения зависимостей UBbIX от /н и у.
36
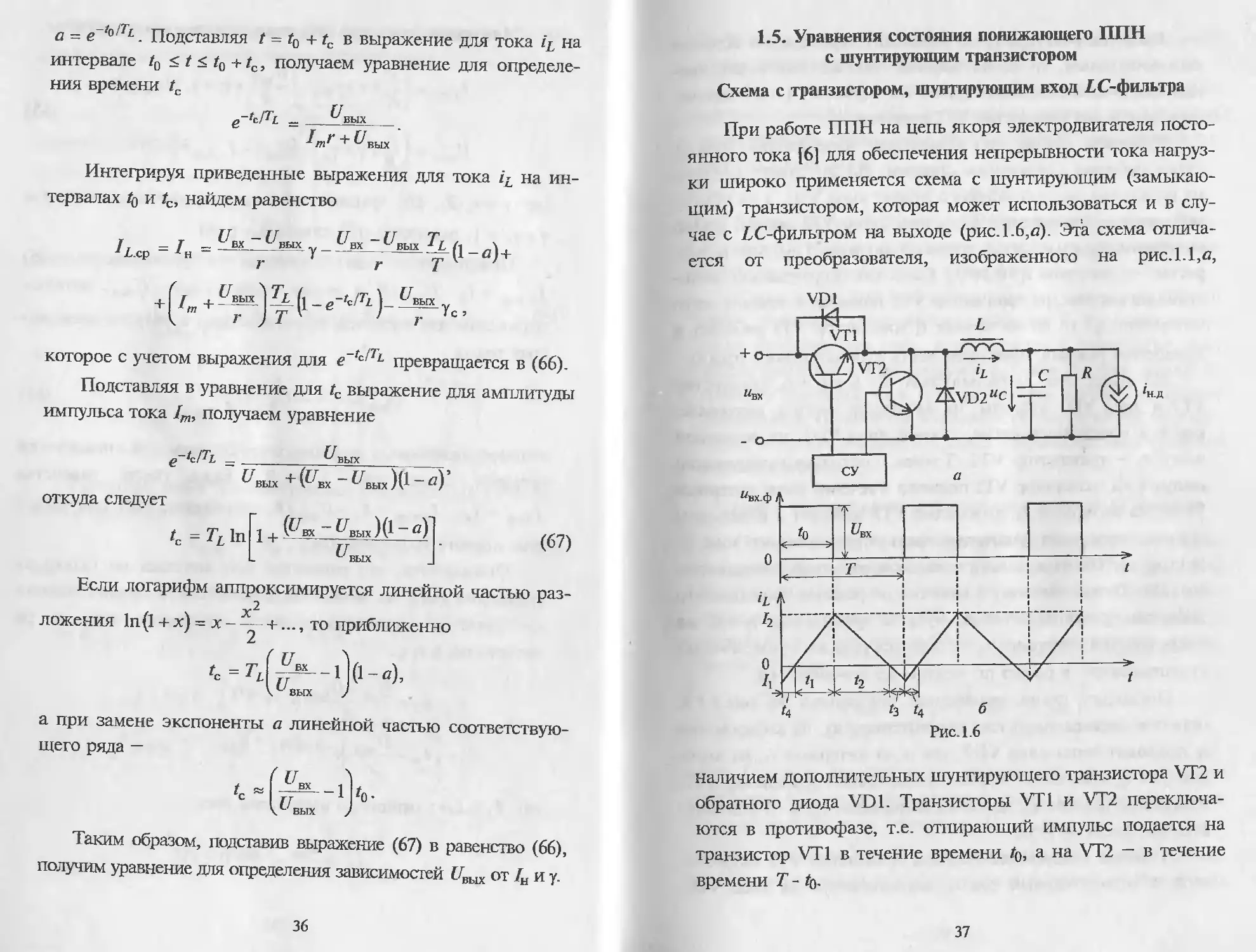
1.5. Уравнения состояния понижающего ППН
с шунтирующим транзистором
Схема с транзистором, шунтирующим вход ZC-фильтра
При работе ППН на цепь якоря электродвигателя посто-
янного тока (6] для обеспечения непрерывности тока нагруз-
ки широко применяется схема с шунтирующим (замыкаю-
щим) транзистором, которая может использоваться и в слу-
чае с £С-фильтром на выходе (рис. 1.6,а). Эта схема отлича-
ется от преобразователя, изображенного на рис.1.1,о,
VD1
Рис. 1.6
наличием дополнительных шунтирующего транзистора VT2 и
обратного диода VD1. Транзисторы VT1 и VT2 переключа-
ются в противофазе, т.е отпирающий импульс подается на
транзистор VT1 в течение времени (q, а на VT2 — в течение
времени Т - /о-
37
Если ток реактора /д не переходит через нуль и остается
положительным, то схема работает так же, как и рассмот-
ренная простейшая схема (рис.1.1,а), диод VD1 не открыва-
ется, ток через транзистор VT2 отсутствует.
В общем случае при изменении направления тока
схема работает следующим образом. На интервале t0 — Zj+Z4
на начальной части /4 которого открыт диод VD1, а на осталь-
ной части — транзистор VT1, а транзистор VT2 закрыт, вектор
состояния Хф изменяется согласно формуле (14), ток iL воз-
растает от значения /)<0 до /2- Если, как было указано, отпи-
рающий импульс на транзистор VT1 подается в течение всего
интервала /0, то на интервале транзистор VT1 работает в
инверсном режиме, пропуская часть отрицательного тока /д.
На интервале длительностью Т - Zq = Z2 + h транзистор
VT1 и диод VD1 закрыты, на начальной части /2 интервала,
как и в простейшей схеме, открыт диод VD2, на остальной
части Z3 — транзистор VT2. Точнее, поскольку отпирающий
импульс на транзистор VT2 подается в течение всего интервала
Т - «Ь, на интервале /3 транзистор VT2 работает в инверсном
режиме, пропуская некоторую часть отрицательного тока /д.
Вектор состояния Хф изменяется в соответствии с выражени-
ем (15). Таким образом, в отличие от режима прерывистого
тока, ток Уд уменьшается до нуля за время спада /2 = tc, на
последующем интервале /3 не остается равным нулю, а меня-
ет направление и растет по модулю до значения |/j I.
Поскольку схема замещения, показанная на рис. 1.1,в,
остается справедливой как для интервала t?, на котором ток
/д проходит через диод VD2, так и на интервале г3, на кото-
ром ток /д замыкается через шунтирующий транзистор VT2,
изменение вектора Хф на обоих интервалах (/2 и /3) описыва-
ется выражением (15).
В начале следующего периода транзистор VT2 выключа-
ется, и отрицательный ток /д переключается на диод VD1.
38
За время Z4 ток iL уменьшается до нуля, меняет направление
и перехватывается транзистором VT1.
Итак, в данной схеме во всех режимах справедливо раз-
ностное уравнение (16), устраняется влияние на динамику
нелинейности, связанной с периодическим прерыванием то-
ка z£ на время паузы
/п = T-t0-tc.
Благодаря этому схема имеет линейные внешние и регу-
лировочные характеристики во всем диапазоне изменения
среднего значения тока /н и длительности /0.
Схема позволяет выбирать меньшее, чем в простейшей
схеме, значение индуктивности фильтра £, не опасаясь ре-
жима прерывистого тока, и обеспечить в переходных про-
цессах при сбросе тока нагрузки гн более быстрое снижение
среднего значения тока iL и уменьшить выброс выходного
напряжения. Появляется возможность поддержания на неко-
торых этапах переходного процесса отрицательного среднего
значения тока /£.
Схема с транзистором, шунтирующим реактор £С-фильтра
При скачкообразном уменьшении тока нагрузки от 1Н до
£H.min выходное напряжение понижающего ППН (рис. 1.1,о)
быстро увеличивается несмотря на полное выключение регу-
лирующего транзистора VT1, появляется выброс выходного
напряжения. Значение выброса бюстах вычисляется по из-
вестной формуле
где UCmax — максимальное напряжение на конденсаторе
фильтра; Пвых — среднее значение выходного напряжения до
скачка тока. Обычно отношение Пс.твх/^вых не должно пре-
вышать значений 1,1 - 1,2. В противном случае емкость фильт-
ра увеличивается по сравнению со значением, необходимым
39
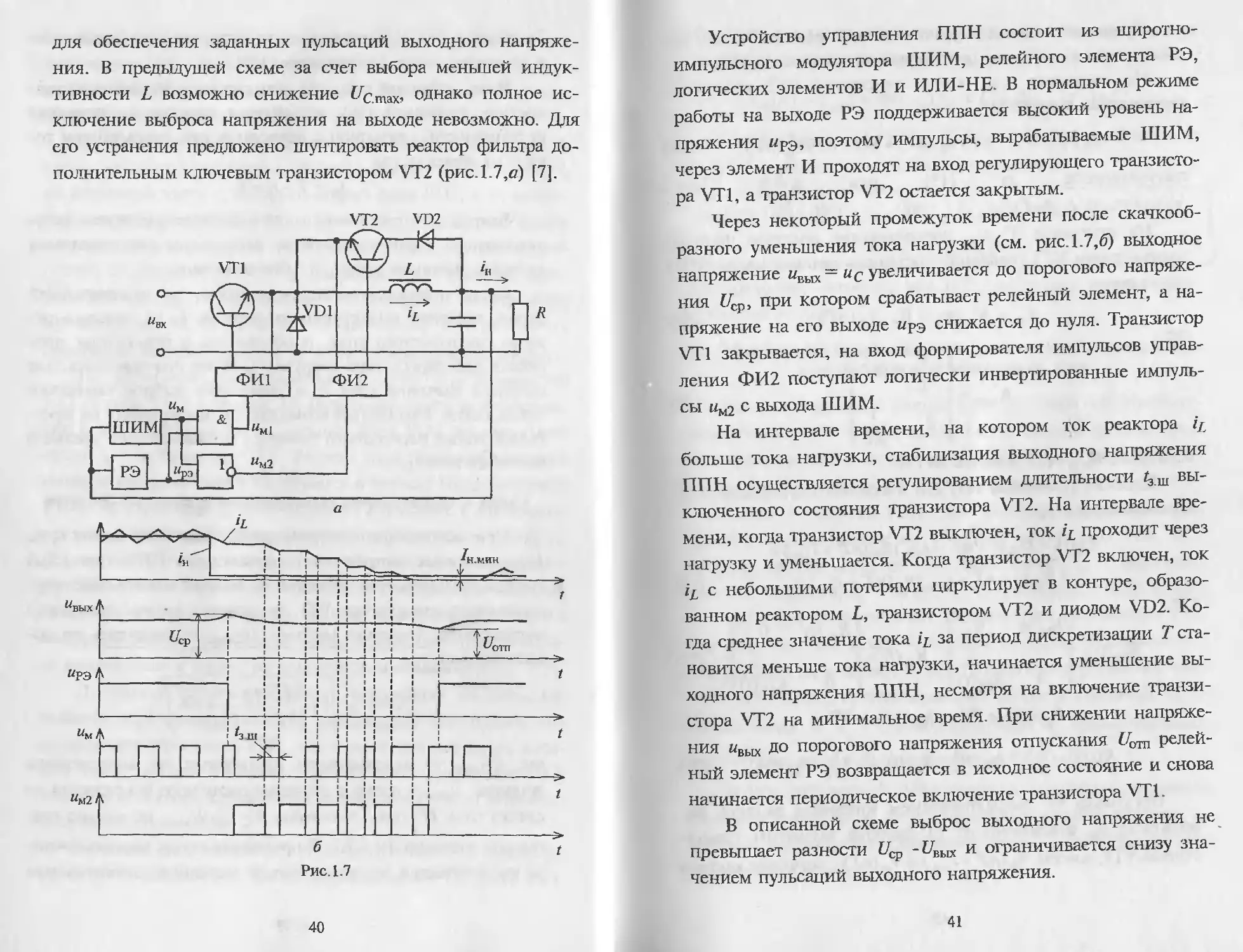
для обеспечения заданных пульсаций выходного напряже-
ния. В предыдущей схеме за счет выбора мены пей индук-
тивности L возможно снижение UCmi№> однако полное ис-
ключение выброса напряжения на выходе невозможно. Для
его устранения предложено шунтировать реактор фильтра до-
полнительным ключевым 'транзистором VT2 (рис. 1.7,о) [7].
40
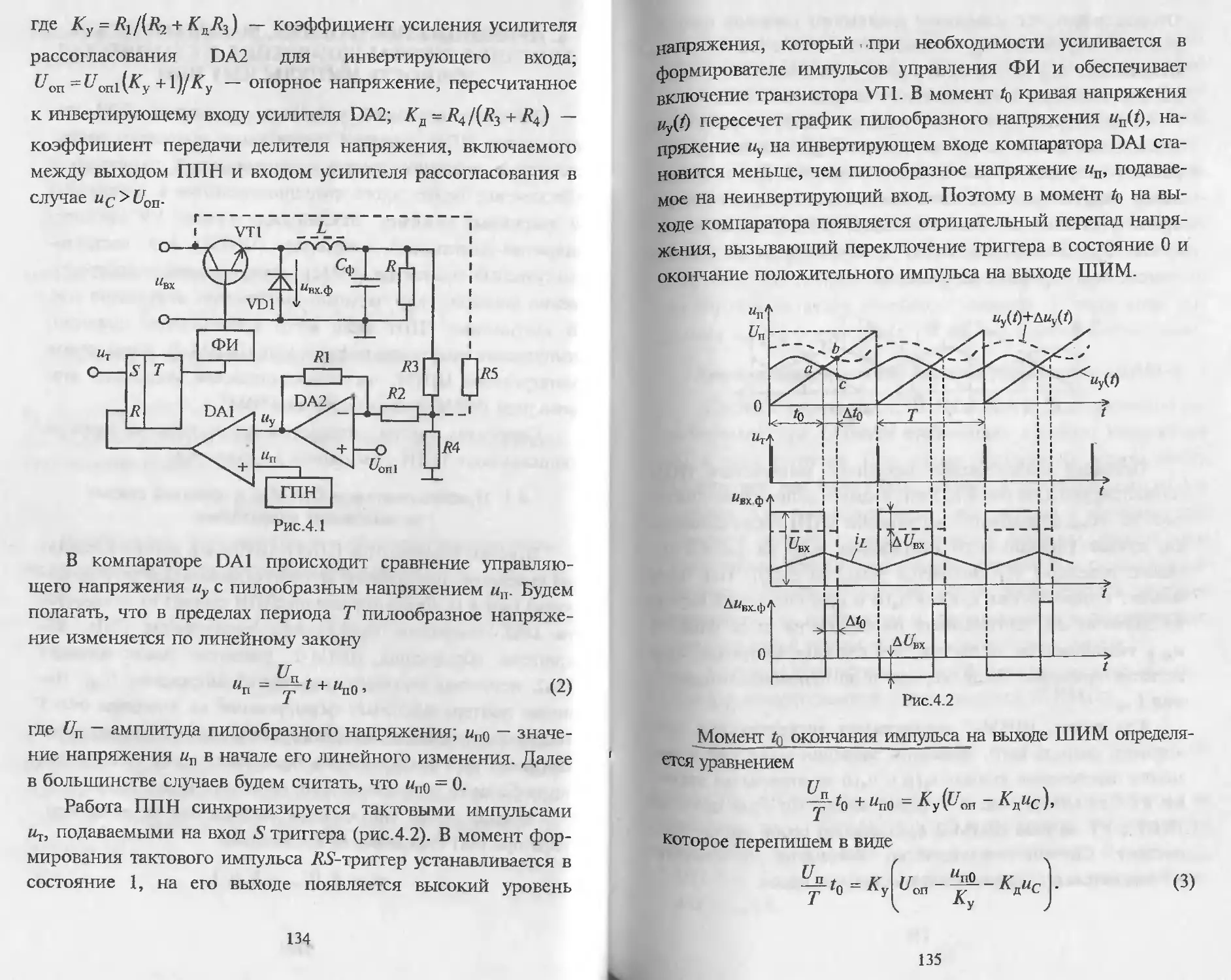
Устройство управления ППН состоит из широтно-
импульсного модулятора ШИМ, релейного элемента РЭ,
логических элементов И и ИЛИ-HE. В нормальном режиме
работы на выходе РЭ поддерживается высокий уровень на-
пряжения ирэ, поэтому импульсы, вырабатываемые ШИМ,
через элемент И проходят на вход регулирующего транзисто-
ра VT1, а транзистор VT2 остается закрытым.
Через некоторый промежуток времени после скачкооб-
разного уменьшения тока нагрузки (см. рис. 1.7,6) выходное
напряжение «вых= и с увеличивается до порогового напряже-
ния Пср, при котором срабатывает релейный элемент, а на-
пряжение на его выходе ирэ снижается до нуля. Транзистор
VT1 закрывается, на вход формирователя импульсов управ-
ления ФИ2 поступают логически инвертированные импуль-
сы пм2 с выхода ШИМ.
На интервале времени, на котором ток реактора
больше тока нагрузки, стабилизация выходного напряжения
ППН осуществляется регулированием длительности /зш вы-
ключенного состояния транзистора VT2. На интервале вре-
мени, когда транзистор VT2 выключен, ток z'p проходит через
нагрузку и уменьшается. Когда транзистор VT2 включен, ток
/р с небольшими потерями циркулирует в контуре, образо-
ванном реактором L, транзистором VT2 и диодом VD2. Ко-
гда среднее значение тока /р за период дискретизации Т ста-
новится меньше тока нагрузки, начинается уменьшение вы-
ходного напряжения ППН, несмотря на включение транзи-
стора VT2 на минимальное время. При снижении напряже-
ния «ВЬ[Х до порогового напряжения отпускания бготп релей-
ный элемент РЭ возвращается в исходное состояние и снова
начинается периодическое включение транзистора VT1.
В описанной схеме выброс выходного напряжения не
превышает разности -£/ВЬ[Х и ограничивается снизу зна-
чением пульсаций выходного напряжения.
41
Приведем основные уравнения для режима, когда пе-
риодически включается шунтирующий транзистор VT2.
На интервале /зш, когда транзистор VT2 выключен,
справедливо выражение
хф (г) = Ф(Г - пТ) хф (и7) + В(7 - п Г) Уф (пТ), (68)
получающееся из (15) при to = O. Здесь
Тф(лГ) = |03 /НД(«П|Г-
На интервале Т - г, ш шунтирования реактора фильтра
транзистором VT2 уравнение состояния силовой части ППН
имеет вид
где
-^Ф ~ АН фХф + ВНфУф(и7’),
(69)
(70)
а матрица Вн ф определяется из (3).
Решение уравнения (69) для очередного интервала шун-
тирования реактора:
хф(0 = Нф(/ - пТ - <з.ш)Хф(пГ + Г3.Ш) +
+ Кф(г-пГ- зли) "Г > (71)
где
АФ1(О 0 Дц(о 0
Нф(0 = ; Вф(0 = ; (72)
0 Лф2 (0 о /?ф2(0
Лф](0 = ^/Л; Лф2 (Г) = e^RC- (73)
Яф! (Z) .= | [1 - Аф1 (/)]; /?ф2(0 = -Л [1 - /гф2 (/)]. (74)
Поскольку на рассматриваемом интервале входное на-
пряжение ивх отключено от ZC-фильтра закрытым транзи-
стором VT1, имеем Уф(пГ + *3.ш) = Уф(иТ). Значение вектора
42
состояния в момент включения шунтирующего транзистора
получается подстановкой t = пТ + /зш в (68):
ХфСиГ + /зш) = Ф(^ш)Хф(пТ) + В(?зш)у'ф(и7’).
Подставляя t = (n + V)T в (71), с учетом выражения для
Хф(лТ + ^зш) получаем разностное уравнение
ХФ [(« + ОН = н(г - ?з.ш)[ф(^.ш)хФ(л Л + Вф(/зш>ф(и7’)]+
__________________+Кф(Г-Гз,ш)уф(»Т)._________________(75)
Это уравнение сложнее, чем (17), поскольку требует пере-
множения матриц.
1.6. Импульсный преобразователь, работающий на цепь якоря
электродвигателя постоянного тока
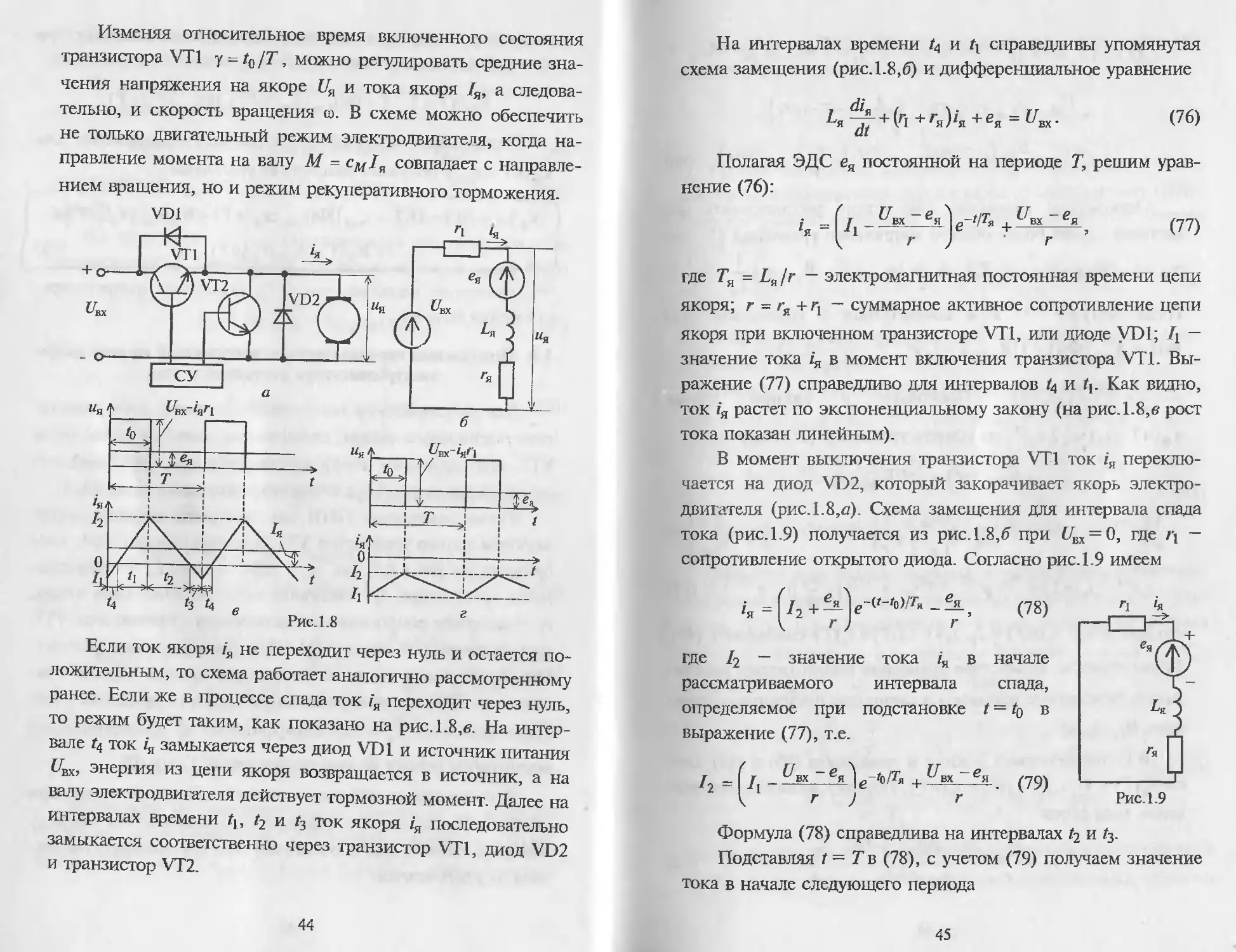
Для регулирования напряжения на якоре электродвига-
теля постоянного тока ия применяется схема с транзистором
VT2, шунтирующим якорь электродвигателя (рис. 1.8,о), от-
личающаяся от рис. 1.6,о только характером нагрузки [6, 8].
Схема замещения ППН для интервала времени, когда
включен только транзистор VT1, или только диод VD1, изо-
бражена на рис. 1.8,6, где ея — ЭДС якоря, Ья — индуктив-
ность цепи якоря, гя — активное сопротивление цепи якоря,
П — активное сопротивление включенного транзистора VT1,
или включенного диода VD1. При расчетах электромагнит-
ных процессов в схемах с электродвигателями обычно счи-
тают, что ЭДС ея пропорциональна скорости вращения элек-
тродвигателя со: ея = с'со. Коэффициент с'е пропорционален
магнитному потоку Ф электродвигателя: с' = сеФ.
В рассматриваемой схеме имеются небольшие пульсации
скорости вращения со, вызванные пульсациями тока якоря гя,
которые, однако, при определении тока ia в большинстве слу-
чаев не учитываются.
43
Изменяя относительное время включенного состояния
транзистора VT1 у -tc/T, можно регулировать средние зна-
чения напряжения на якоре ия и тока якоря 1Я, а следова-
тельно, и скорость вращения со. В схеме можно обеспечить
не только двигательный режим электродвигателя, когда на-
правление момента на валу М = смЦ совпадает с направле-
нием вращения, но и режим рекуперативного торможения.
Если ток якоря /я не переходит через нуль и остается по-
ложительным, то схема работает аналогично рассмотренному
ранее. Если же в процессе спада ток /я переходит через нуль,
то режим будет таким, как показано на рис. 1.8,в. На интер-
вале ток гя замыкается через диод VD1 и источник питания
U3X, энергия из цепи якоря возвращается в источник, а на
валу электродвигателя действует тормозной момент. Далее на
интервалах времени Ц , и t3 ток якоря /я последовательно
замыкается соответственно через транзистор VT1, диод VD2
и транзистор VT2.
44
На интервалах времени /4 и справедливы упомянутая
схема замещения (рис. 1.8,6) и дифференциальное уравнение
Ья^ + (г1+гя)1я+ея=ивк. (76)
Полагая ЭДС ея постоянной на периоде Т, решим урав-
нение (76):
т р-ЧТя , ^вх -
11 ---------- 1с -I------------
г ) г
(77)
где Тя - Ья/г — электромагнитная постоянная времени цепи
якоря; г = гя + г\ — суммарное активное сопротивление цепи
якоря при включенном транзисторе VT1, или диоде VD1; Ц —
значение тока /я в момент включения транзистора VT1. Вы-
ражение (77) справедливо для интервалов t4 и t\. Как видно,
ток i„ растет по экспоненциальному закону (на рис. 1.8,в рост
тока показан линейным).
В момент выключения транзистора VT1 ток /я переклю-
чается на диод VD2, который закорачивает якорь электро-
двигателя (рис. 1.8,а). Схема замещения для интервала спада
тока (рис. 1.9) получается из рис. 1.8,6 при Свх = 0, где Г\ —
сопротивление открытого диода. Согласно рис. 1.9 имеем
i
Я “
(78)
_£я,
г
где /2 ~ значение тока /я в начале
рассматриваемого интервала спада,
определяемое при подстановке t = t0 в
выражение (77), т.е.
I2 = f Д -е-^ + Ubx - вя- . (79)
И «я
Рис. 1.9
Формула (78) справедлива на интервалах t2 и t2.
Подставляя t — 7 в (78), с учетом (79) получаем значение
тока в начале следующего периода
45
i„(T) = \ 12 + -я ]е~(Т-'о^ - = fI - Ubx- g« Vra +
< r J Г < Г J
+ UBX - ея e^T-t0)/Tx _ e„[j e^T-t0)/T„ 1 =
г г 1 J
= +^1-(Г-Го)/7-я _е-Т1тДе.1^т1т\ (8())
г L J г ' '
Одномерное уравнение (76) можно рассматривать как
частный случай более общего матричного уравнения (2), где
ХФ=/Я’ Анф ~ ~г ' ~ ~ - Уф = II Ывх ’ йя |! > ®н.ф ~ “т-’ — т •
ья II II
Тогда Ф(Г) = е~г/Тк, а в соответствии с равенством (12)
В(') = А;1ф[Ф(0 - 1 ]внф = -тя(е-^ - 1)-Й,-1|| =
= --(e"z/7”Поскольку в данном случае
*ф(и7’ + 4) = ВО,ея|т, из общего уравнения (17) получим
/„[(n + DTbe-^i^BT)-
II ея
= e~T^iB(nT) +
_1[е-(7--го)/7’я_1]||1)_1ц|° =
II я
(81)
что при п - 0, /я(иГ) = /ь /я[(и + 1)7’] = 4(7) совпадает с (80).
Таким образом, разностное уравнение (81) позволяет рассчи-
тывать переходные процессы в схеме при постоянных значе-
ниях ея, /д.
В установившемся режиме в уравнениях (80) и (81) име-
ем /я(7’) = /ь 4[(и +1)7] = 1я(пТ), поэтому минимальное зна-
чение тока якоря
j _U^ е^т-^-е-т^ ев
1 г 1-е^Т/Т'я г
(82)
46
Подставляя (82) в (79), находим максимальное значение
тока якоря в установившемся режиме
г ^вх 1-^ ея
2 г г
(83)
Одним из важных параметров, характеризующих режим
работы электродвигателя при питании от импульсного ППН,
является размах пульсаций тока якоря, который с учетом
(82) и (83)
Д/ = /2 - Л
Цвх (1-е-УГя)|1 е-(^0)/7’я|
г 1-е г т«
(84)
Важно подчеркнуть, что в соответствии с (84) размах
пульсаций тока якоря не зависит от ЭДС цепи якоря ея.
Иногда для упрощения записи формул вводят обозначе-
ния а = е~‘°^Тя , b = т* [6] Тогда ет'Тл = ab и
(1 д) _ . J _ ® .
г 1 - ab г 2 г 1 ab г ’
А/ = ПВХ (1-Д)(1-&)
г 1 - ab
(85)
Обычно в реальных системах электроприводов постоян-
ная времени цепи якоря Тя велика по сравнению с периодом
Т, т.е. Т/Т„ « 1. При заменах а, b и ab линейными частями
их разложений в ряды Тейлора а а 1 - tQ /Тя,
b « 1 - (Г - /О)/Тя , ah ~1-Т/Тя получим:
1s®'
U Т
l-^(l-Y) Y-
r L К J
е„ j е„
12 » — у ——;
и т и
A/«^^(1-Y)Y = H;(1-Y)Y,
г Тя LJ
(86)
где у = /о/Т; f = 1/7. Следовательно, размах пульсаций тока
якоря Д/ пропорционален входному напряжению, обратно
47
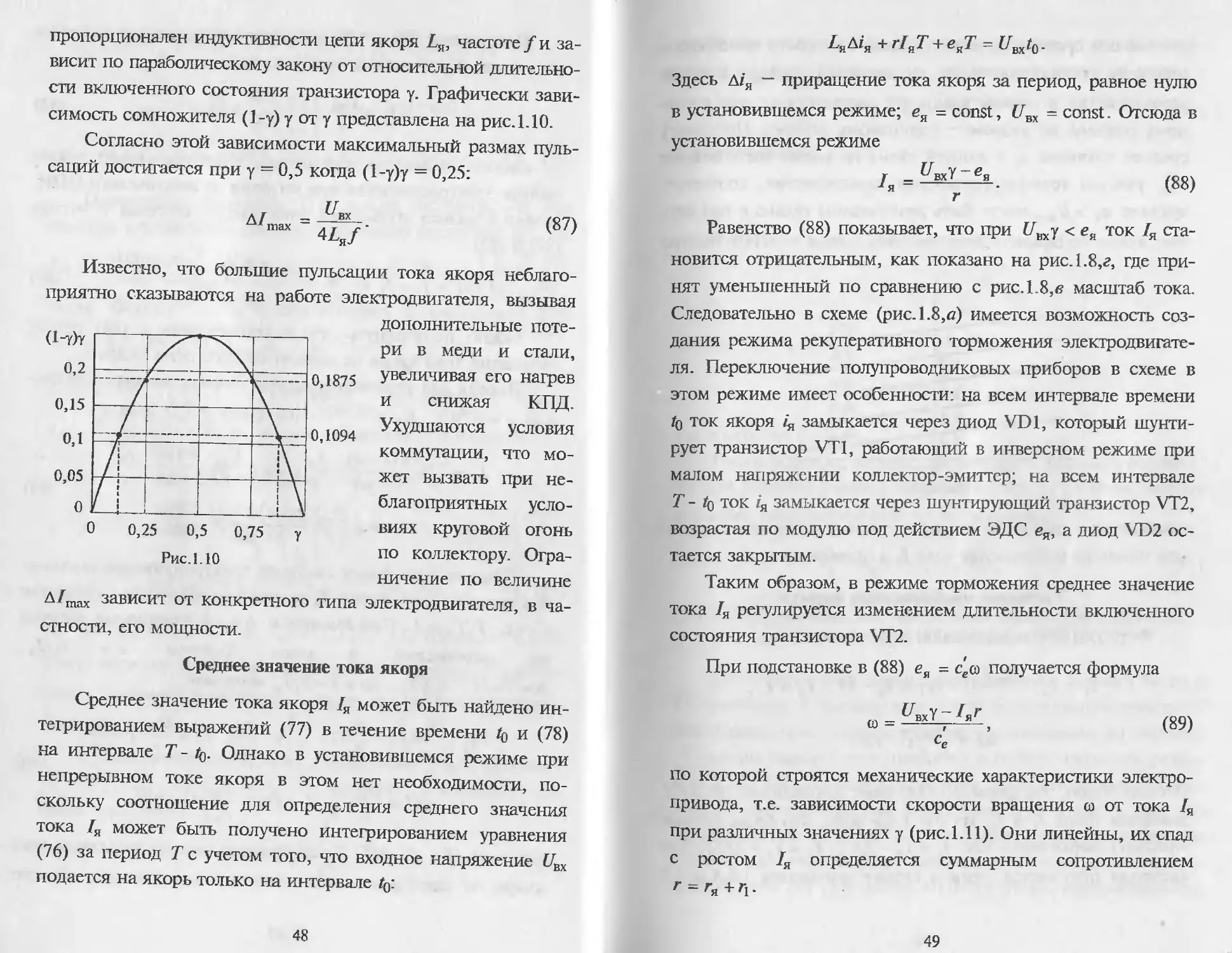
пропорционален индуктивности цепи якоря £я, частоте f и за-
висит по параболическому закону от относительной длительно-
сти включенного состояния транзистора у. Графически зави-
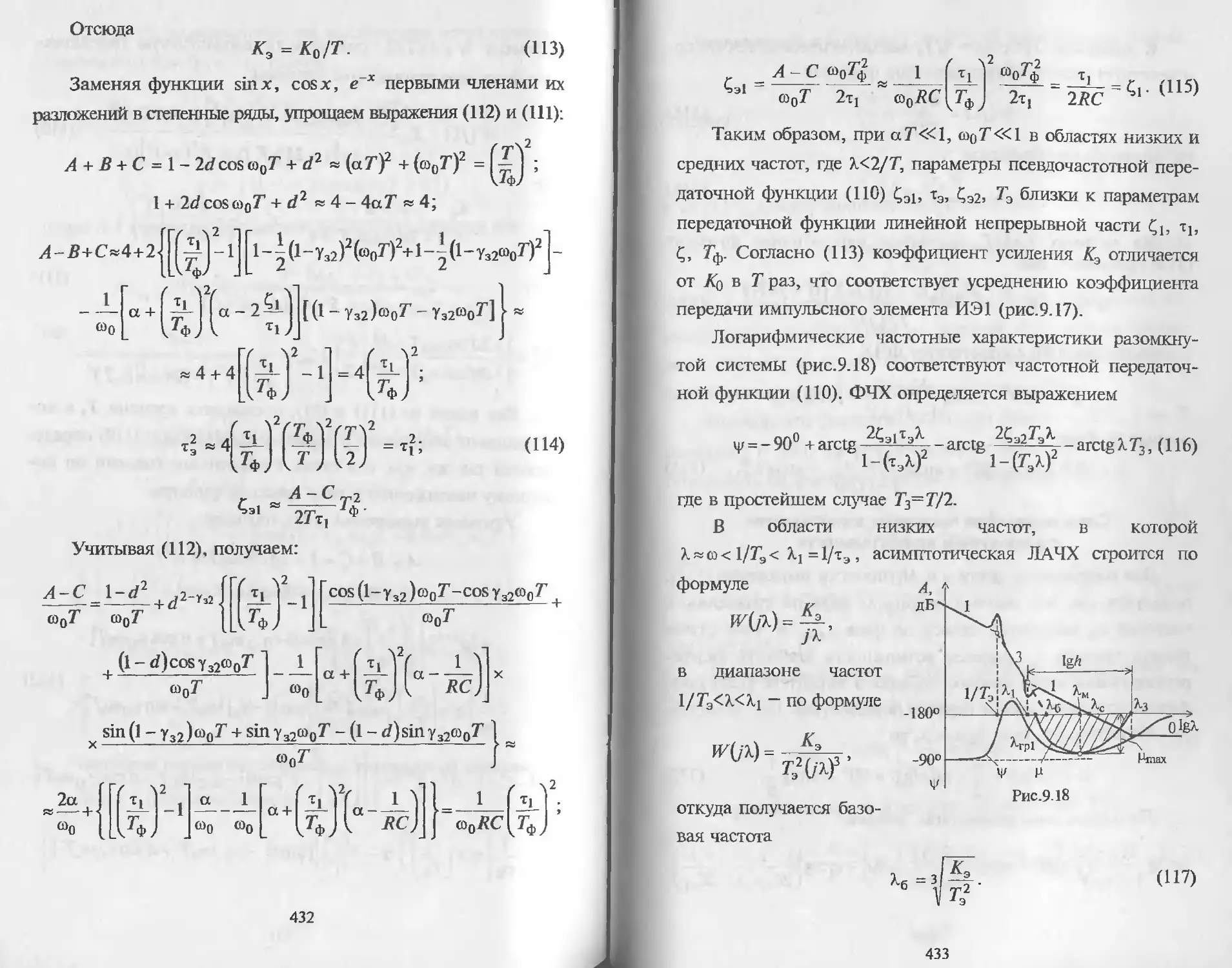
симость сомножителя (1-у) у от у представлена на рис. 1.10.
Согласно этой зависимости максимальный размах пуль-
саций достигается при у = 0,5 когда (1-у)у = 0,25:
Д/ = _^ВХ_
1Пах 4£я/ ’
(87)
Известно, что большие пульсации тока якоря неблаго-
приятно сказываются на работе электродвигателя, вызывая
д7тах
зависит от конкретного типа
дополнительные поте-
ри в меди и стали,
увеличивая его нагрев
и снижая КПД.
Ухудшаются условия
коммутации, что мо-
жет вызвать при не-
благоприятных усло-
виях круговой огонь
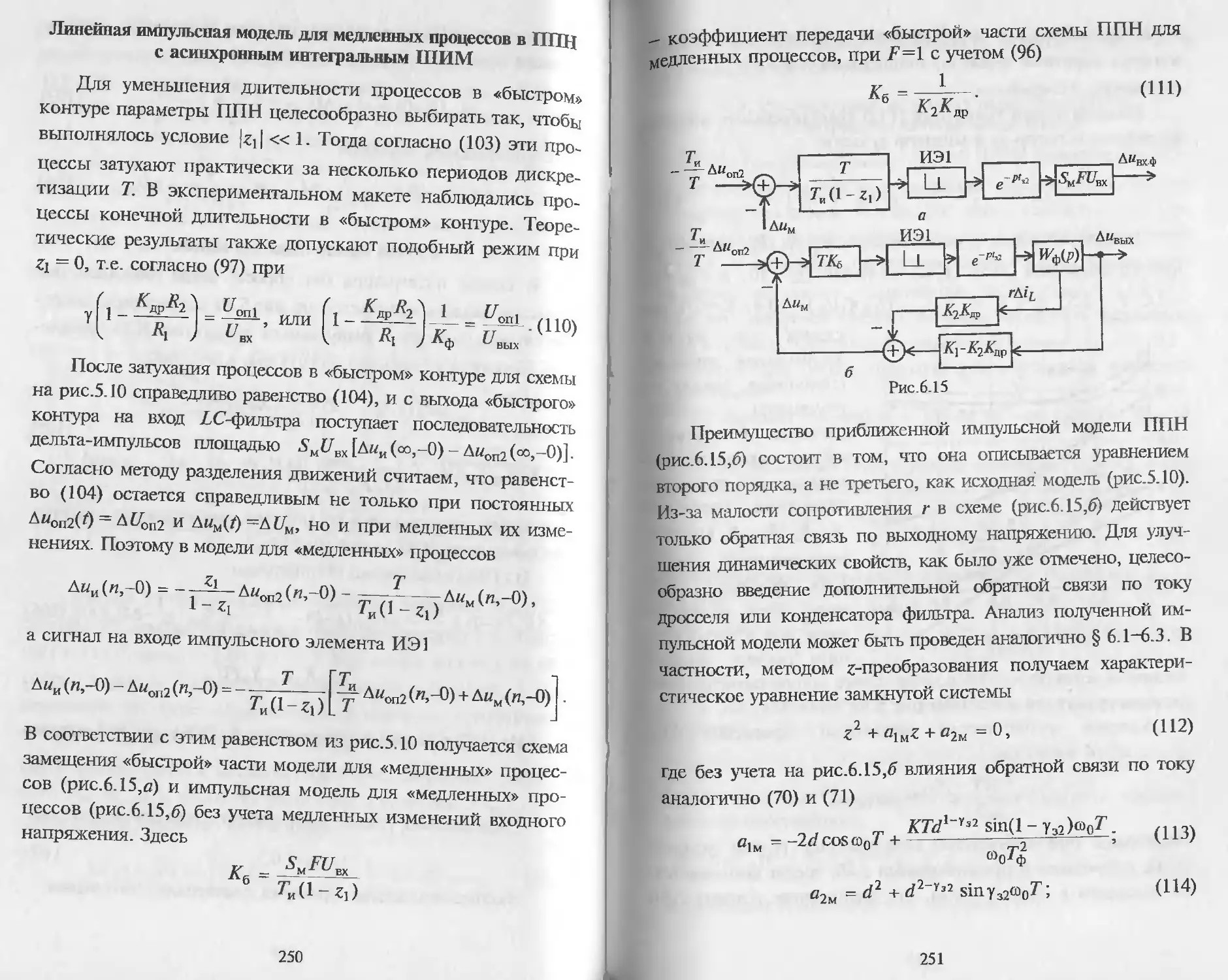
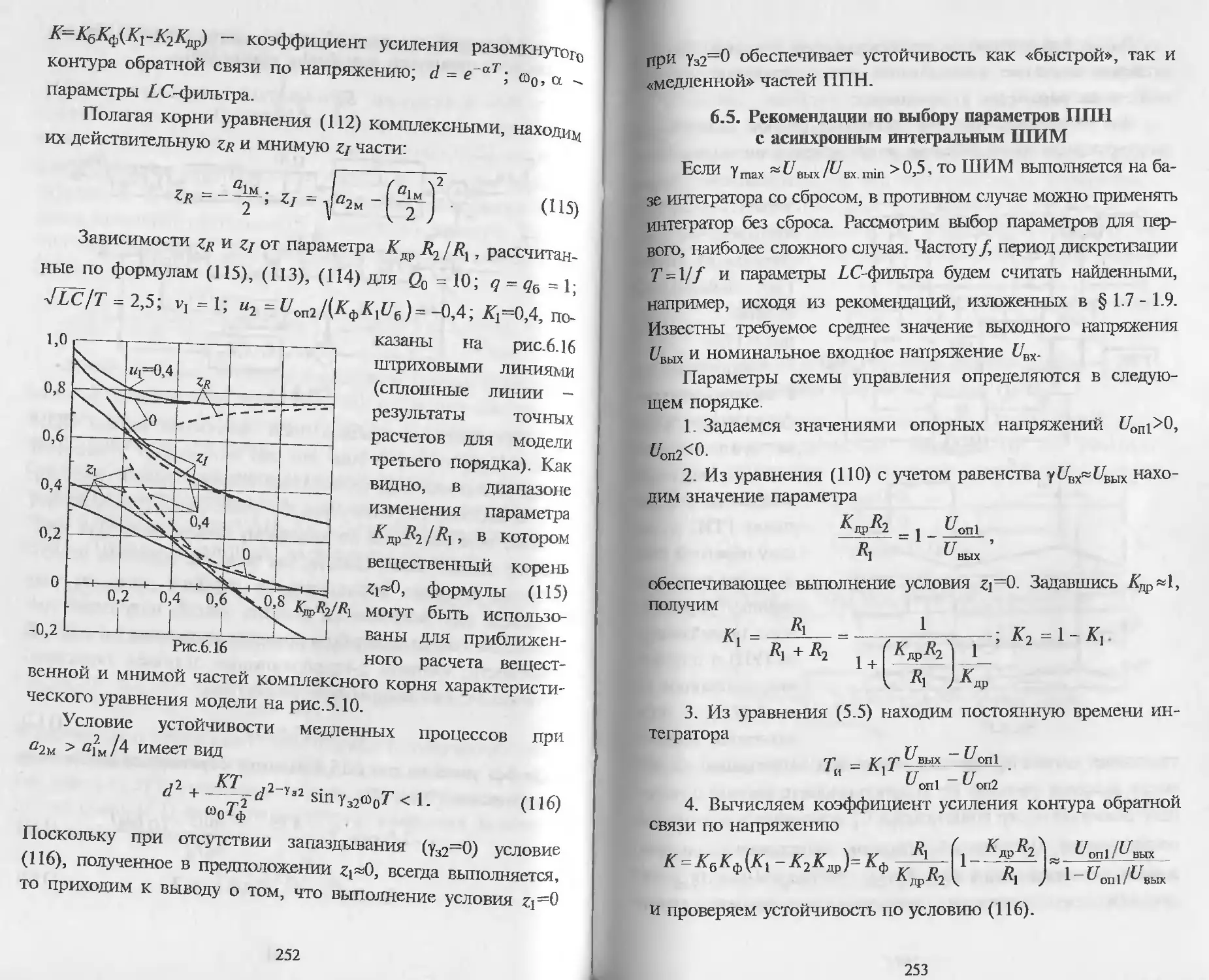
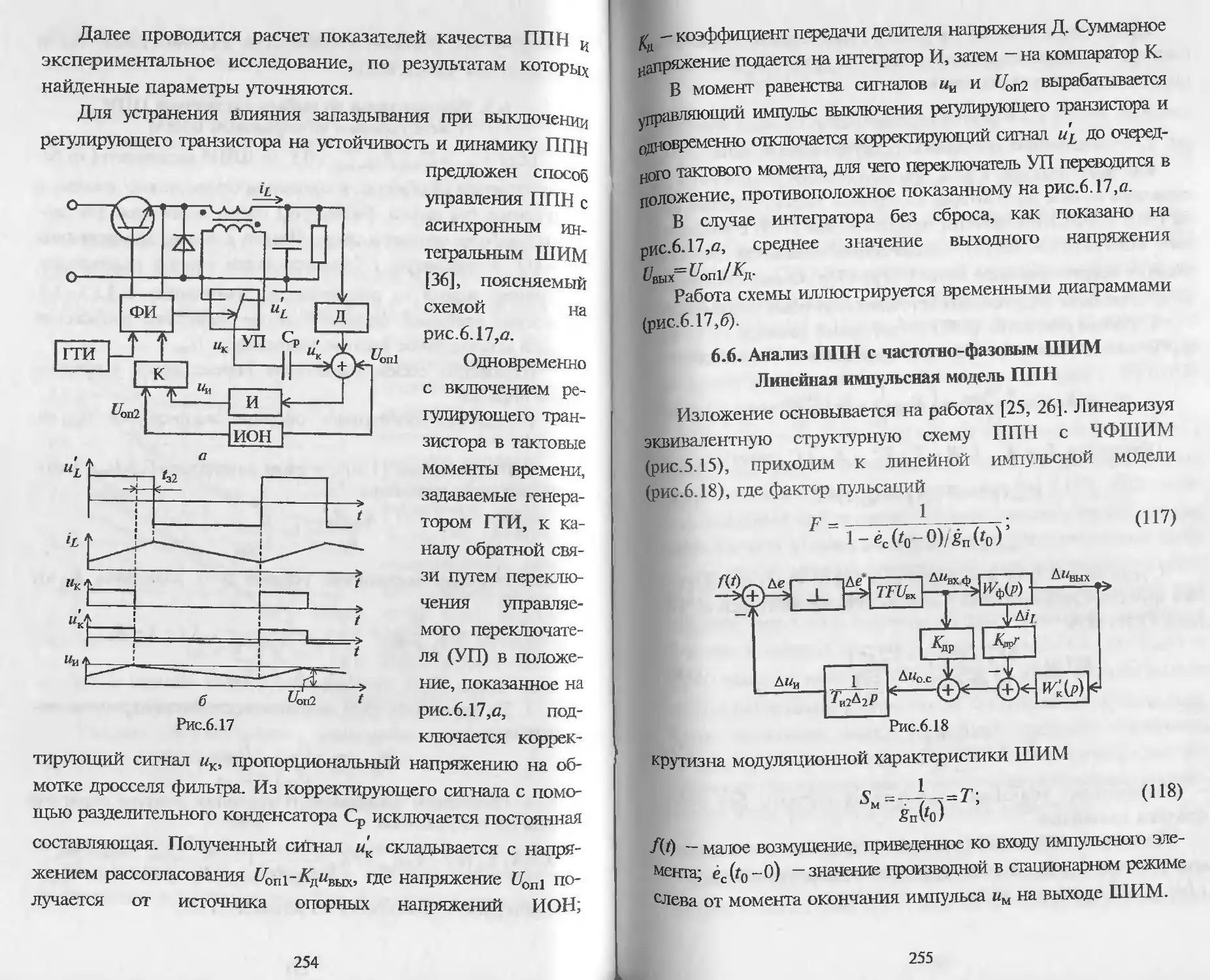
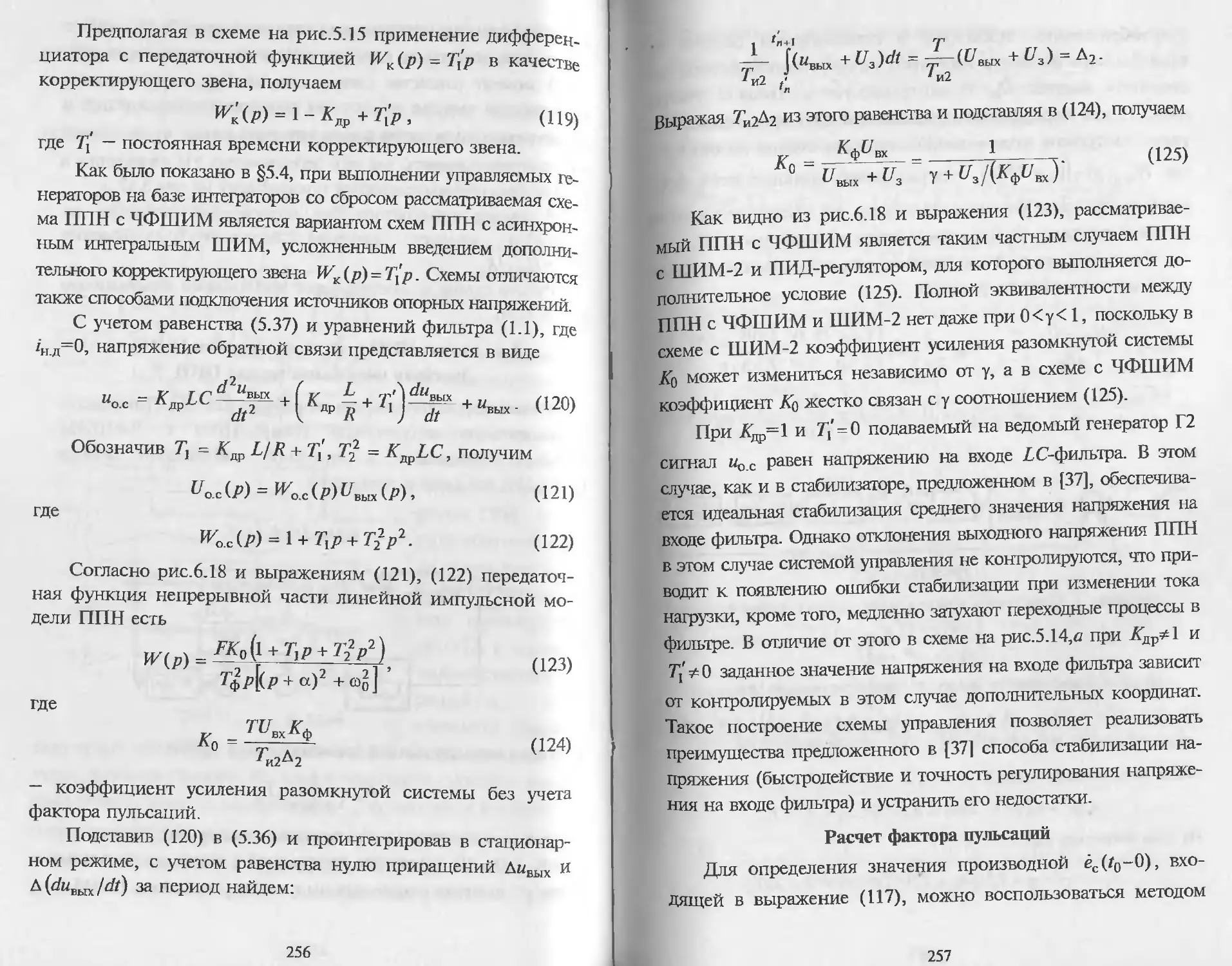
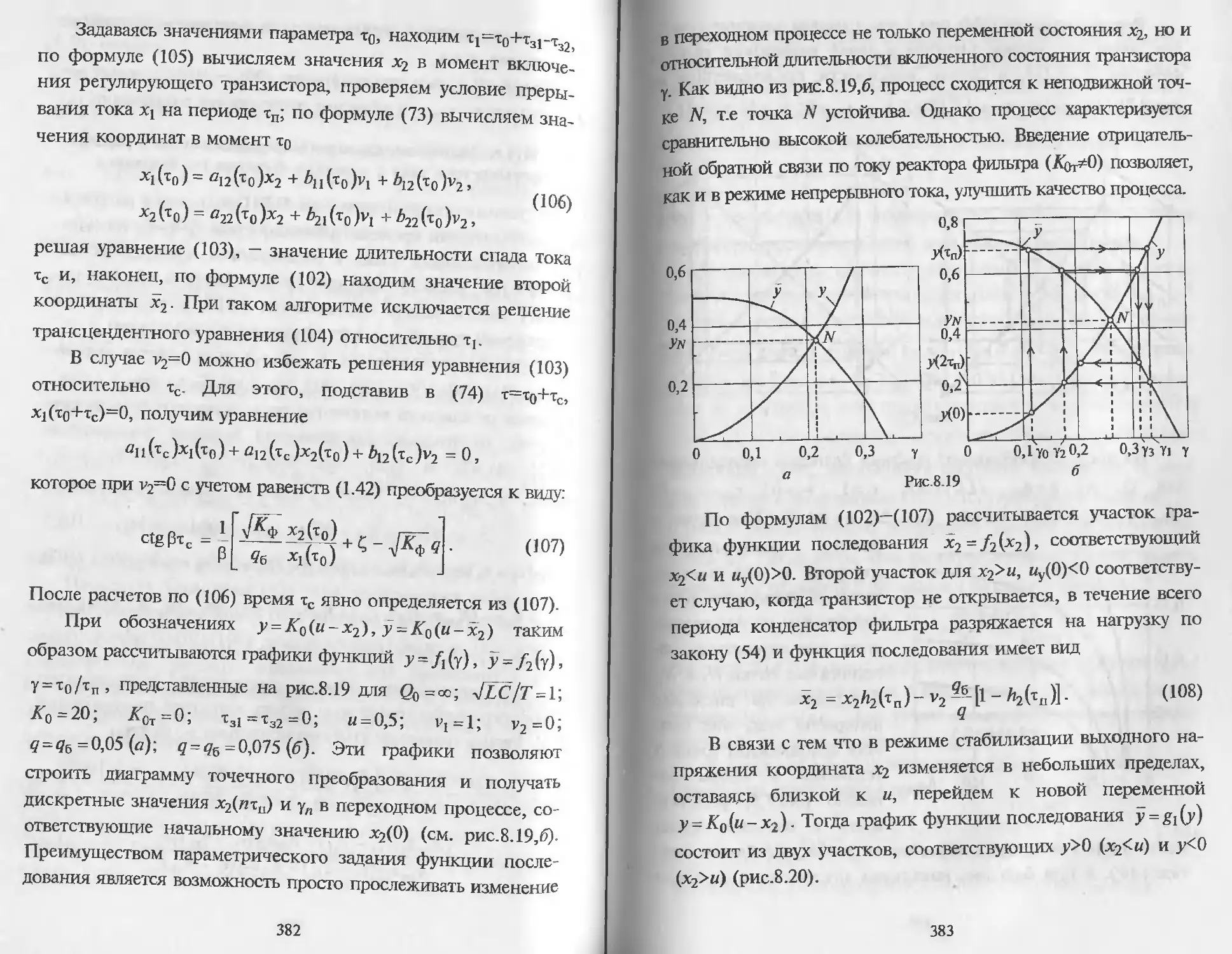
по коллектору. Огра-
ничение по величине
электродвигателя, в ча-
стности, его мощности.
Среднее значение тока якоря
Среднее значение тока якоря /я может быть найдено ин-
тегрированием выражений (77) в течение времени (q и (78)
на интервале Т - t$. Однако в установившемся режиме при
непрерывном токе якоря в этом нет необходимости, по-
скольку соотношение для определения среднего значения
тока /я может быть получено интегрированием уравнения
(76) за период Т с учетом того, что входное напряжение Свх
подается на якорь только на интервале /0:
48
+rI„T + eRT = UBXt0.
Здесь д!я — приращение тока якоря за период, равное нулю
в установившемся режиме; ея = const, f/BX = const. Отсюда в
установившемся режиме
/я = ggxY-.gg.. (88)
г
Равенство (88) показывает, что при Umy < ея ток /я ста-
новится отрицательным, как показано на рис. 1.8,г, где при-
нят уменьшенный по сравнению с рис. 1.8,в масштаб тока.
Следовательно в схеме (рис. 1.8,с) имеется возможность соз-
дания режима рекуперативного торможения электродвигате-
ля. Переключение полупроводниковых приборов в схеме в
этом режиме имеет особенности: на всем интервале времени
Го ток якоря замыкается через диод VD1, который шунти-
рует транзистор VT1, работающий в инверсном режиме при
малом напряжении коллектор-эмиттер; на всем интервале
Т- to ток /я замыкается через шунтирующий транзистор VT2,
возрастая по модулю под действием ЭДС ея, а диод VD2 ос-
тается закрытым.
Таким образом, в режиме торможения среднее значение
тока 7Я регулируется изменением длительности включенного
состояния транзистора VT2.
При подстановке в (88) е„ = с'ео получается формула
// у — Т г
СО = —Bxt, (89)
се
по которой строятся механические характеристики электро-
привода, т.е. зависимости скорости вращения со от тока /я
при различных значениях у (рис. 1.11). Они линейны, их спад
с ростом 1Я определяется суммарным сопротивлением
г = гя+й-
49
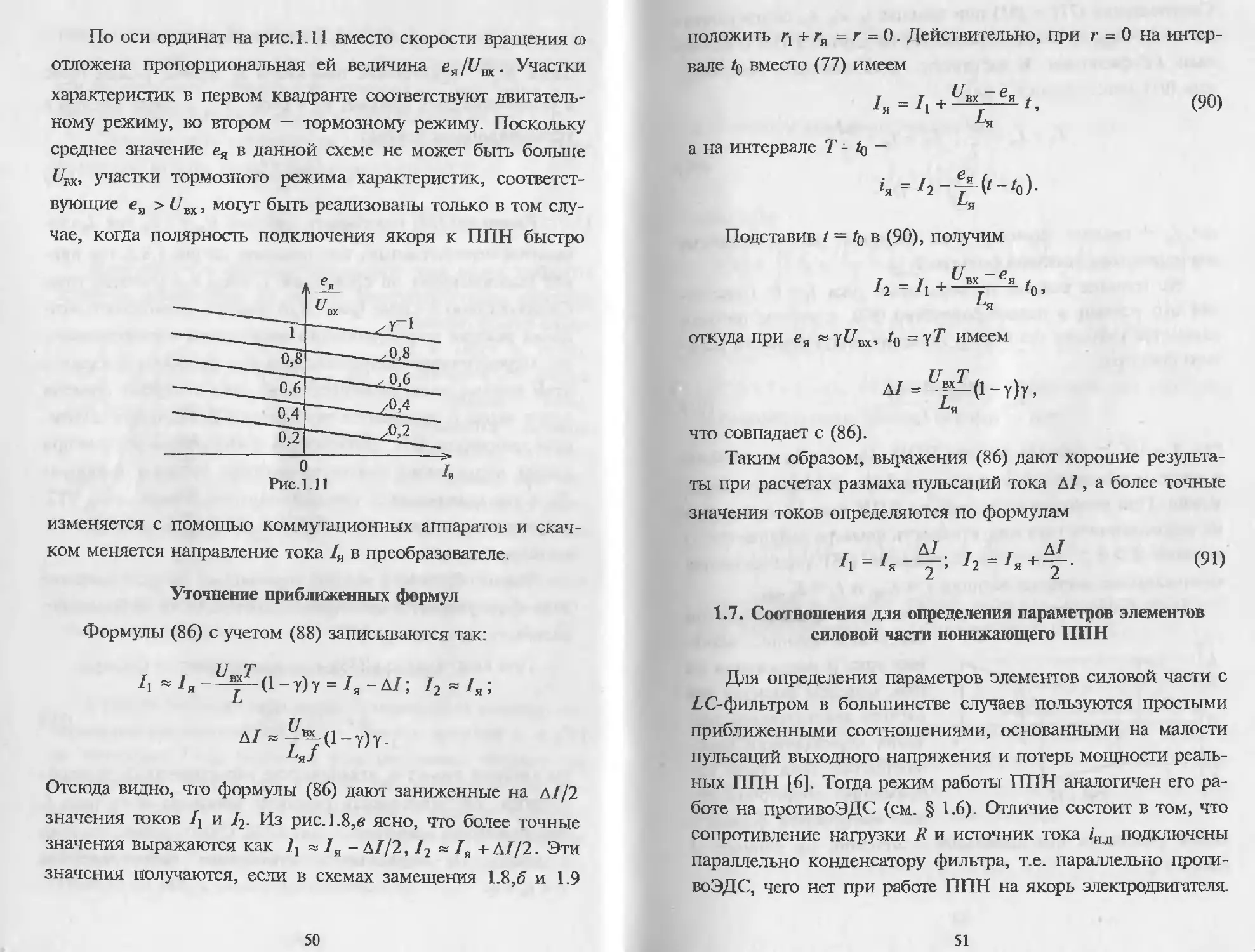
По оси ординат на рис. 1.11 вместо скорости вращения а>
отложена пропорциональная ей величина es/Um. Участки
характеристик в первом квадранте соответствуют двигатель-
ному режиму, во втором — тормозному режиму. Поскольку
среднее значение ея в данной схеме не может быть больше
t/Bx> участки тормозного режима характеристик, соответст-
вующие ея > <7ВХ, могут быть реализованы только в том слу-
чае, когда полярность подключения якоря к ППН быстро
изменяется с помощью коммутационных аппаратов и скач-
ком меняется направление тока /я в преобразователе.
Уточнение приближенных формул
Формулы (86) с учетом (88) записываются так:
U Т
Д/«^(1-у)у.
Отсюда видно, что формулы (86) дают заниженные на д//2
значения токов /j и /2- Из рис. 1.8,в ясно, что более точные
значения выражаются как « /я - Д//2, /2 « Л + Д//2. Эти
значения получаются, если в схемах замещения 1.8,6 и 1.9
50
положить Г] + гя = г = 0. Действительно, при г - 0 на интер-
вале /0 вместо (77) имеем
U -е
/я = А + V я С (90)
а на интервале Т - —
ья
Подставив t = t0 в (90), получим
U -е
Т _ 1 Г вх я f
12 - 11 +-7---Ч) >
-^я
откуда при ея ® yt7BX, ?0 = уТ имеем
Л/=^(1-у)г,
что совпадает с (86).
Таким образом, выражения (86) дают хорошие результа-
ты при расчетах размаха пульсаций тока Л7, а более точные
значения токов определяются по формулам
А = А.-у1 (91)
1.7. Соотношения для определения параметров элементов
силовой части понижающего ППН
Для определения параметров элементов силовой части с
£С-фильтром в большинстве случаев пользуются простыми
приближенными соотношениями, основанными на малости
пульсаций выходного напряжения и потерь мощности реаль-
ных ППН [6]. Тогда режим работы ППН аналогичен его ра-
боте на противоЭДС (см. § 1.6). Отличие состоит в том, что
сопротивление нагрузки 7? и источник тока /н д подключены
параллельно конденсатору фильтра, т.е. параллельно проти-
воЭДС, чего нет при работе ППН на якорь электродвигателя.
51
Соотношения (77) — (91) при заменах /я, ея, Ья соответствен-
но на II, иъых, L распространяются на случай ППН с выход-
ным ZC-фильтром. В частности, приближенные соотноше-
ния (91) записываются в виде
I -I
71 " " 2 ’
AZ=y-^(l-Y)Y,
н 2 ,
2
(92)
где /н — среднее значение тока нагрузки, равное среднему
значению тока реактора фильтра II ср.
На границе режима непрерывного тока Д — 0. Подстав-
ляя это условие в первое равенство (92), с учетом третьего
равенства находим граничное значение индуктивности реак-
тора фильтра
_^вых(1-у)
гр
2/4
(93)
где f = 1/Т — рабочая частота ППН; Ubba = yUBX — прибли-
женное выражение для среднего значения выходного напря-
жения. При необходимости работы ППН (рис. 1.1,с) в режи-
ме непрерывного тока индуктивность фильтра выбирается из
условия L > Lrp, причем в выражение (93) подставляются
минимальные значения величин у = ут|П и /н = ZH.min -
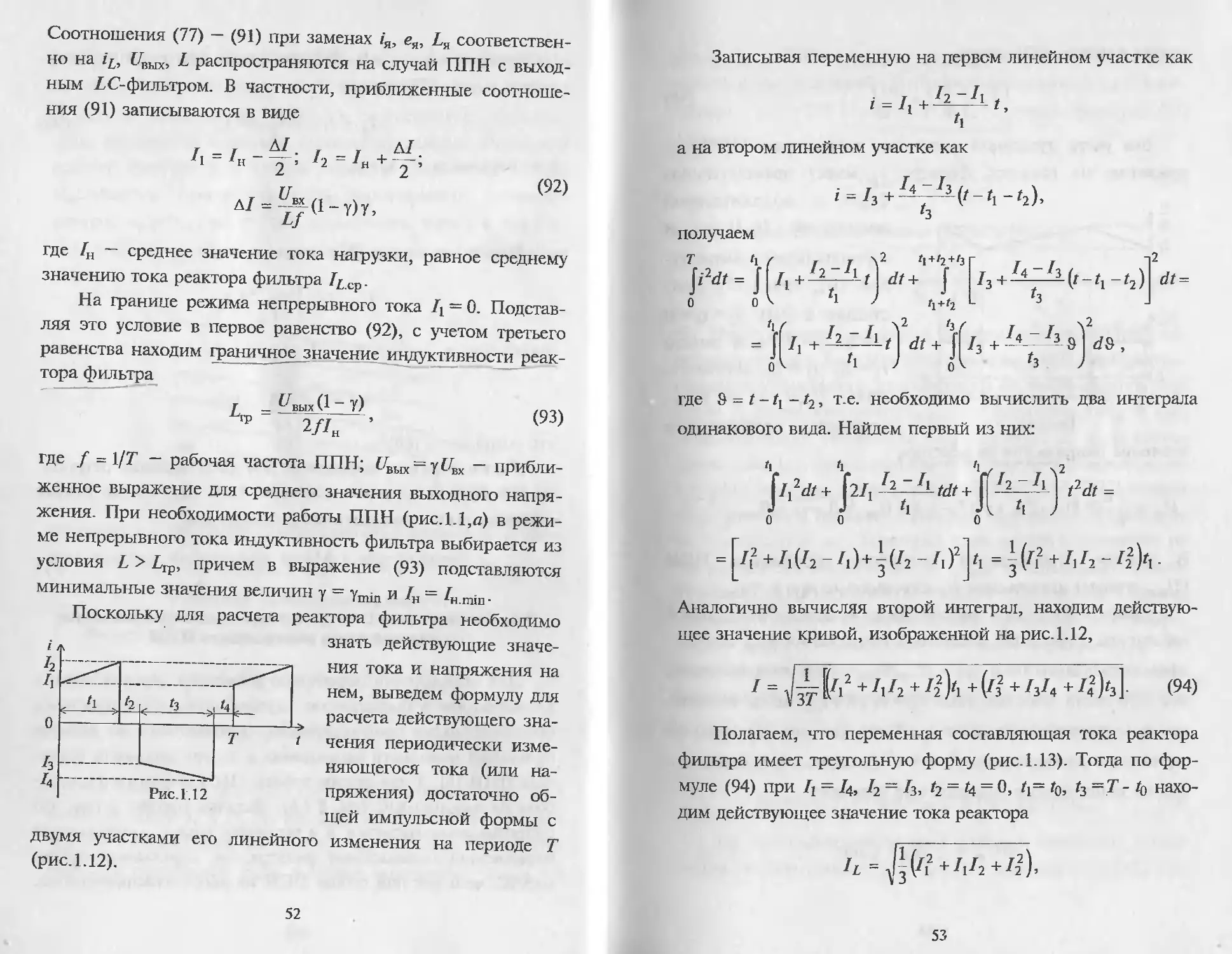
Поскольку для расчета реактора фильтра необходимо
знать действующие значе-
ния тока и напряжения на
нем, выведем формулу для
расчета действующего зна-
чения периодически изме-
няющегося тока (или на-
пряжения) достаточно об-
щей импульсной формы с
изменения на периоде Т
двумя участками его линейного
(рис. 1.12).
52
Записывая переменную на первом линейном участке как
z = A
t,
а на втором линейном участке как
где 9 = t - -t2, т.е. необходимо вычислить два интеграла
одинакового вида. Найдем первый из них:
Л2 + Л(Лг - Л)+^(Л ~ Л)2
h - ^0? + Л^2 “ ^2)Г1
Аналогично вычисляя второй интеграл, находим действую-
щее значение кривой, изображенной на рис. 1.12,
1 = Д4а2+/1Л+л2к+(/2+л2)4 (94)
Полагаем, что переменная составляющая тока реактора
фильтра имеет треугольную форму (рис.1.13). Тогда по фор-
муле (94) при /1 = Ц, I2 - h, h = U = 0, 6= {о-> h ~ 4) нахо-
дим действующее значение тока реактора
II - лк^2 +ЛЛ
V □
53
откуда с учетом (92) имеем
(95)
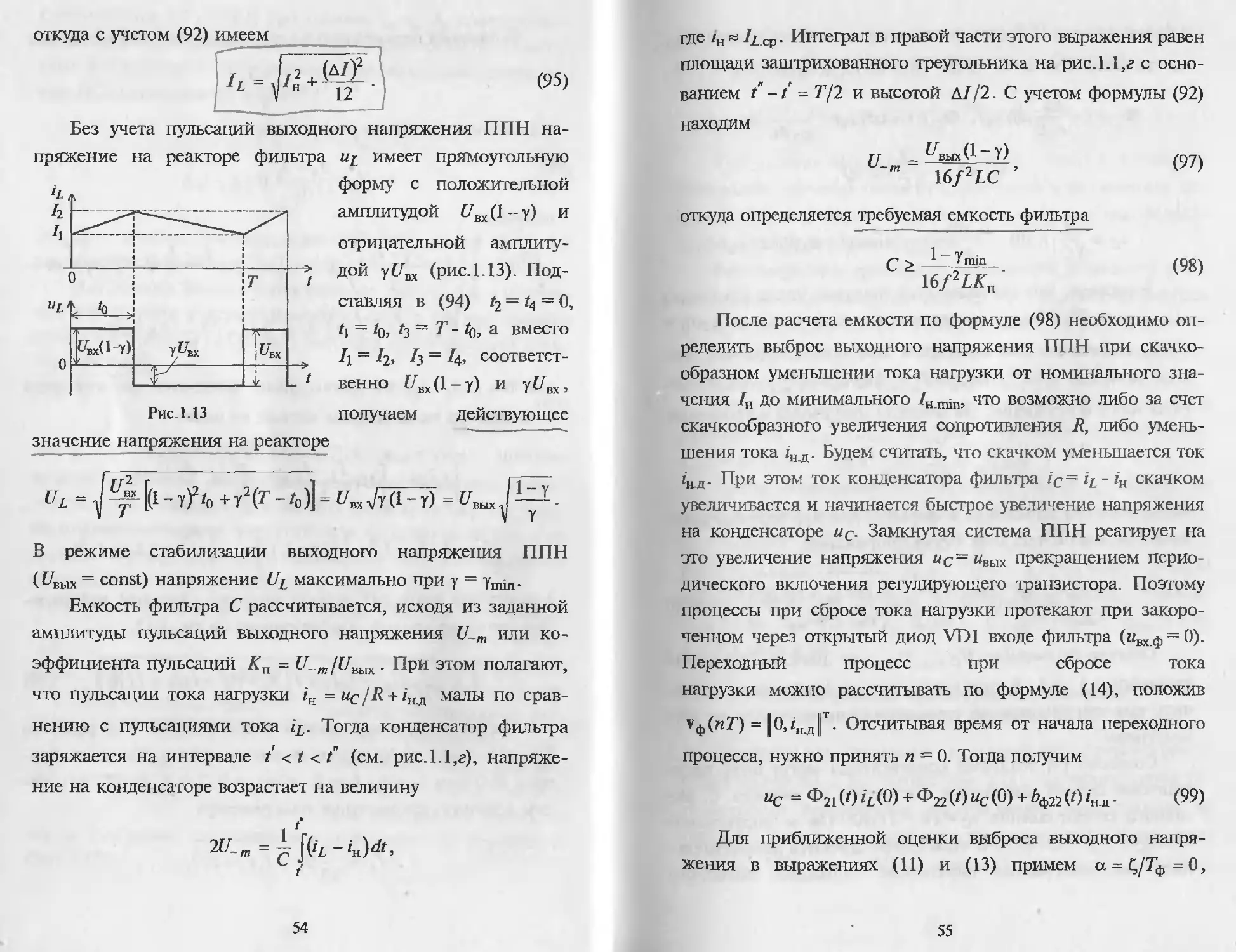
Без учета пульсаций выходного напряжения ППН на-
пряжение на реакторе фильтра
Рис.1.13
«£ имеет прямоугольную
форму с положительной
амплитудой £/вх(1-у) и
отрицательной амплиту-
дой yf/BX (рис. 1.13). Под-
ставляя в (94) /2 ~ — О,
tt = t0, tj — Т - to, а вместо
71 = /2, h = Ц, соответст-
венно 1/вх(1-у) и yf/BX,
получаем действующее
значение напряжения на реакторе
I тг2 Г I pi
UL = J ^4(1 - y)4 + 12{т - /0) = f/BX 77(1^7) = и \ .
« Т V Y
В режиме стабилизации выходного напряжения ППН
(Ц,ых = const) напряжение U[ максимально при у = ymin.
Емкость фильтра С рассчитывается, исходя из заданной
амплитуды пульсаций выходного напряжения U~m или ко-
эффициента пульсаций Кп = и_т1иъъп. При этом полагают,
что пульсации тока нагрузки zH -uc/R + zH д малы по срав-
нению с пульсациями тока /£. Тогда конденсатор фильтра
заряжается на интервале t < t < t" (см. рис. 1.1,г), напряже-
ние на конденсаторе возрастает на величину
t
54
(97)
(98)
где /н « // ср. Интеграл в правой части этого выражения равен
площади заштрихованного треугольника на рис.1.1,г с осно-
ванием t"-t = Г/2 и высотой А//2. С учетом формулы (92)
находим
гу _ ^вых(1 ~ У)
16/2LC ’
откуда определяется требуемая емкость фильтра
С > ~ / min
" 16/2£^п ’
После расчета емкости по формуле (98) необходимо оп-
ределить выброс выходного напряжения ППН при скачко-
образном уменьшении тока нагрузки от номинального зна-
чения /н до минимального 4Lmin, что возможно либо за счет
скачкообразного увеличения сопротивления R, либо умень-
шения тока /н.д- Будем считать, что скачком уменьшается ток
гн.д- При этом ток конденсатора фильтра ic= Il~ iK скачком
увеличивается и начинается быстрое увеличение напряжения
на конденсаторе и с- Замкнутая система ППН реагирует на
это увеличение напряжения «с=мЕЫх прекращением перио-
дического включения регулирующего транзистора. Поэтому
процессы при сбросе тока нагрузки протекают при закоро-
ченном через открытый диод VD1 входе фильтра (г«вх ф = 0).
Переходный процесс при сбросе тока
нагрузки можно рассчитывать по формуле (14), положив
Уф(пТ) = ||0,гнд|т. Отсчитывая время от начала переходного
процесса, нужно принять п = 0. Тогда получим
иС = <1>21(01£(0) + <1>22(0ис(0) + ^ф22(0'нл- (99)
Для приближенной оценки выброса выходного напря-
жения в выражениях (11) и (13) примем а = £/Тф=0,
55
Кф = 1, соо = \/4ЬС, что соответствует малости потерь мощ-
ности в силовой части ППН. При таких допущениях
1 1
к —7?8ШИ0/, Фи(0 « COSffi0/-—SlIlCOoG
sm<ooz,
и
«с
ДР (0)_М2)_/
\С L ' R 1
sin со0/ + ис (0) cos a>of.
Учитывая, что значение тока нагрузки после его скачка
ZH.mm = кс(0)/^ + *н.д> напряжение в момент скачка «с(0) ~
~ значение тока реактора в этот момент /£(0) ~/н, мо-
жем записать ис = д/L/C (ZH-/н min)smcoo^ + t^Bblx eosco0Z. От-
сюда найдем уравнение для момента максимума напряжения
tg“(A<
H.min
вых
Подставив это выражение в формулу для и с, получим соот-
ношение для расчета максимума напряжения
= Л/1 + tg2^ Гы = 1 +1 Д I . (100)
12 ВЫХ V 4'0 22 ВЫХ у
Обычно отношение Пс max/t/EbK не должно превышать
значений 1,1...1,2. В противном случае необходимо увели-
чить емкость фильтра по сравнению с полученным из (98)
значением.
Согласно [91 реальные конденсаторы могут быть пред-
ставлены схемой замещения, состоящей из емкости С, ак-
тивного сопротивления rc=(4 — 1I)10"3Om и индуктивно-
сти Lc = (12 — 18) 10~12. В этом случае имеются дополнитель-
ные, так называемые паразитные пульсации выходного
56
напряжения, амплитуда которых в предположении треуголь-
ной формы тока реактора определяется по формуле
тг _ ~ . -^С^вых
mn 2Lf 2Ly ‘
Уменьшение паразитных пульсаций достигается набором
требуемого значения емкости параллельным включением ре-
альных конденсаторов, что приводит к уменьшению эквива-
лентных паразитных параметров.
Регулирующий транзистор выбирается исходя из того,
что напряжение коллектор-эмиттер UK3 = £/вх, ток коллектора
/к =/н. Транзистор должен быть рассчитан на работу в режи-
ме переключений, иметь малые времена переключения (вре-
мя спада и нарастания коллекторного тока).
Обратный диод VD1 выбирается по амплитуде обратного
напряжения ^.об=^вх> среднему значению прямого тока
/ц.ср— 4(1-y)-
Время обратного восстановления диода 1В обычно не
должно превышать долей микросекунды. К диодам с малыми
tB относятся: КД212 (£^об=200 В, /д.Ср=1А, /в = 0,3 мкс),
КД213 (£/цОб = 200 В, /дср=10А, Гв = 0,Змкс), КД220
(Цгоб = 400 В, /Лср =3 А, Гв =0,5 мкс), КД220Г (С/доб =1000 В,
7д.сР =3 A, tB = 0,5 мкс), КД411 (Uaоб = 700 В, /д.ср = 2 А,
/в = 0,5 мкс) и др.
1.8. Улучшение траектории переключения
полупроводниковых приборов НИН
Особенности процессов переключения транзистора в
схеме на рис.1.1,а, рассмотренные в [6], иллюстрируются уп-
рощенными временными диаграммами, показанными на
рис. 1.14. В момент начала нарастания тока коллектора тран-
зистора VT1 диод VD1 остается открытым, поскольку
57
ia = i£ - iK > 0. Через открытый диод входное напряжение
преобразователя полностью прикладывается к отпираемому
транзистору, т.е. нарастание тока /к происходит при uK3 — UBx.
Когда ток 1к увеличивается до значения ii, ток диода ia ста-
новится отрицательным, начинается процесс восстановления
обратного сопротивления диода. Идеализация на рис. 1.14 за-
ключается в том, что предполагается: 1) мгновенный спад
обратного тока диода до нуля через время восстановления tB
после его появления; 2) мгновенный спад напряжения икэ на
транзисторе до остаточного значения в момент выключения
диода; 3) нарастание тока iK по линейному закону.
В момент начала спада коллекторного тока транзистора
ток реактора 4 также начинает уменьшаться. В связи с этим
ЭД С самоиндукции реактора L distil меняет знак, стано-
вясь отпирающей для диода. Вследствие отпирания диода
спад коллекторного тока, как и его нарастание, происходит в
условиях, когда к транзистору прикладывается полное вход-
ное напряжение.
58
Средняя мощность динамических (коммутационных) по-
терь в транзисторе при указанном характере процессов пере-
ключения определяется по формуле
Ркл= — [^В'-4^=|^вх7(^ктах/нт+Л4т)>
К..Д J ОЛ К. гтл j t)A К. гл ОЛ«/ к К..ЩЛЛ 11-1 С. 1 J ' ' '
7 о 1 о 1
где время нарастания тока tK т = Дн + 4; 4.н ~ время нараста-
ния тока от 0 до iL, определяемое переходным процессом
включения транзистора; tB — время обратного восстановления
диода; tc т — время спада тока от /д до 0; значение Z2 опреде-
ляется соотношением (92).
При работе ППН на повышенных частотах (десятки и
сотни килогерц) мощность потерь Рк д существенно умень-
шает КПД и ухудшает режим работы транзистора (рабочая
точка может выйти из области безопасной работы (ОБР)).
Поэтому на практике применяют специальные цепи, форми-
рующие более благоприятную траекторию переключения
транзистора. Схемы подобных цепей весьма разнообразны.
Общим для их построения и принципа действия является
следующее: 1) последовательно с включаемым транзистором
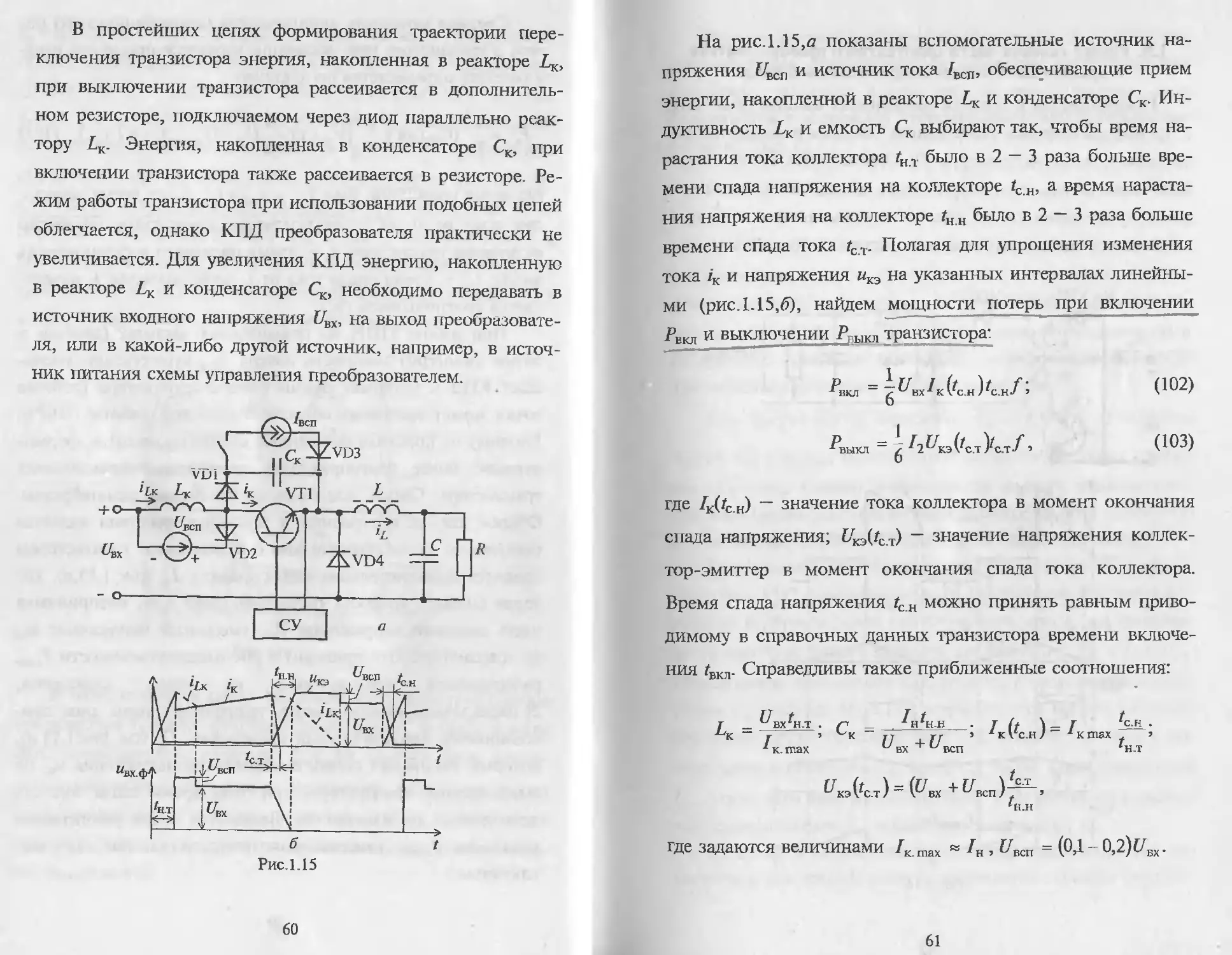
вводится дополнительная индуктивность LK (рис. 1.15,а), ко-
торая снижает скорость нарастания тока /к и, воспринимая
часть входного напряжения (7ВХ, уменьшает напряжение икэ
на транзисторе. Это приводит к уменьшению мощности Рвкл,
рассеиваемой транзистором на этапе включения;
2) параллельно выключаемому транзистору через диод при-
соединяется дополнительный конденсатор Ск (см. рис.1.15,с),
который уменьшает скорость нарастания напряжения икэ на
выключаемом транзисторе, при этом время спада тока
практически не изменяется. Вследствие этого уменьшается
мощность Рвыкл, рассеиваемая транзистором на этапе вы-
ключения.
59
В простейших цепях формирования траектории пере-
ключения транзистора энергия, накопленная в реакторе LK,
при выключении транзистора рассеивается в дополнитель-
ном резисторе, подключаемом через диод параллельно реак-
тору LK. Энергия, накопленная в конденсаторе Ск, при
включении транзистора также рассеивается в резисторе. Ре-
жим работы транзистора при использовании подобных цепей
облегчается, однако КПД преобразователя практически не
увеличивается. Для увеличения КПД энергию, накопленную
в реакторе L* и конденсаторе Ск, необходимо передавать в
источник входного напряжения t/BX, на выход преобразовате-
ля, или в какой-либо другой источник, например, в источ-
ник питания схемы управления преобразователем.
60
На рис.1.15,о показаны вспомогательные источник на-
пряжения иъсп и источник тока /Всп> обеспечивающие прием
энергии, накопленной в реакторе LK и конденсаторе Ск. Ин-
дуктивность LK и емкость Ск выбирают так, чтобы время на-
растания тока коллектора было в 2 — 3 раза больше вре-
мени спада напряжения на коллекторе /с н, а время нараста-
ния напряжения на коллекторе tH н было в 2 — 3 раза больше
времени спада тока /ст. Полагая для упрощения изменения
тока zK и напряжения икэ на указанных интервалах линейны-
ми (рис. 1.15,6), найдем мощности потерь при включении
Рвкл и выключении Р ыкл транзистора:
(Ю2)
Аыют = ! Л^кэ('с.т>с.т/, (103)
о
где /к(/с.н) ~ значение тока коллектора в момент окончания
спада напряжения; £4э(1с.т) — значение напряжения коллек-
тор-эмиттер в момент окончания спада тока коллектора.
Время спада напряжения tc н можно принять равным приво-
димому в справочных данных транзистора времени включе-
ния ГБКЛ. Справедливы также приближенные соотношения:
/ _ ^вх ^н.т . f _ -*н^н.н . j (f \ — Г ^с.н .
-Чс ~ г s'-к г г > укгс.н/ — 'ктах . >
•* к. max 17 вх + и всп 'н.т
^('стМ^вх +^всп)—>
*н.н
где задаются величинами « /и , 17всп = (0,1 - 0,2)СБХ.
61
1.9. Расчет силовой части однотактного преобразователя
с прямым включением выпрямительного диода
Преимущества и области применения однотактных ППН
с трансформаторным разделением входных и выходных це-
пей обоснованы, например, в [9]. Однотактные ППН с пря-
мым включением выпрямительного диода, построенные по
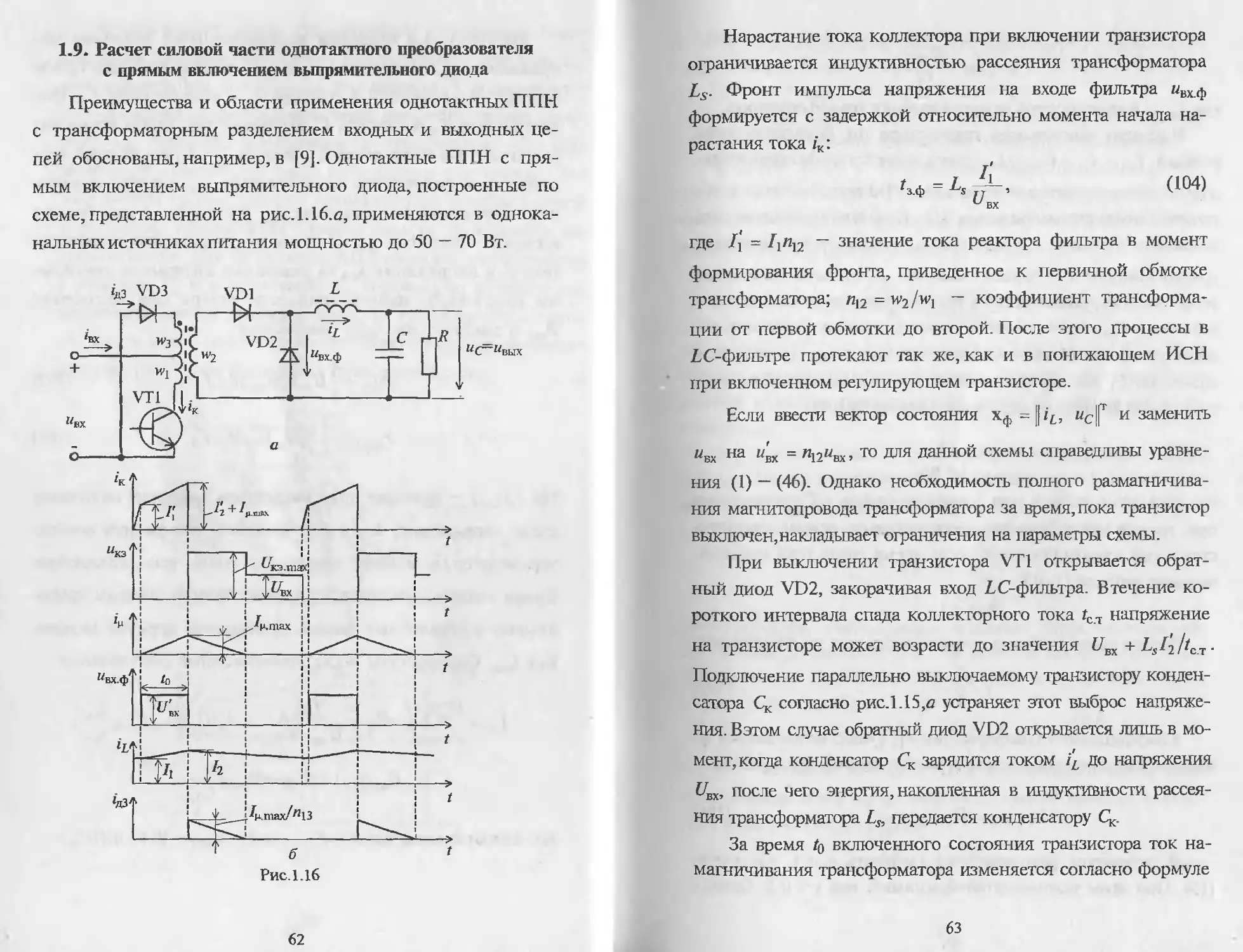
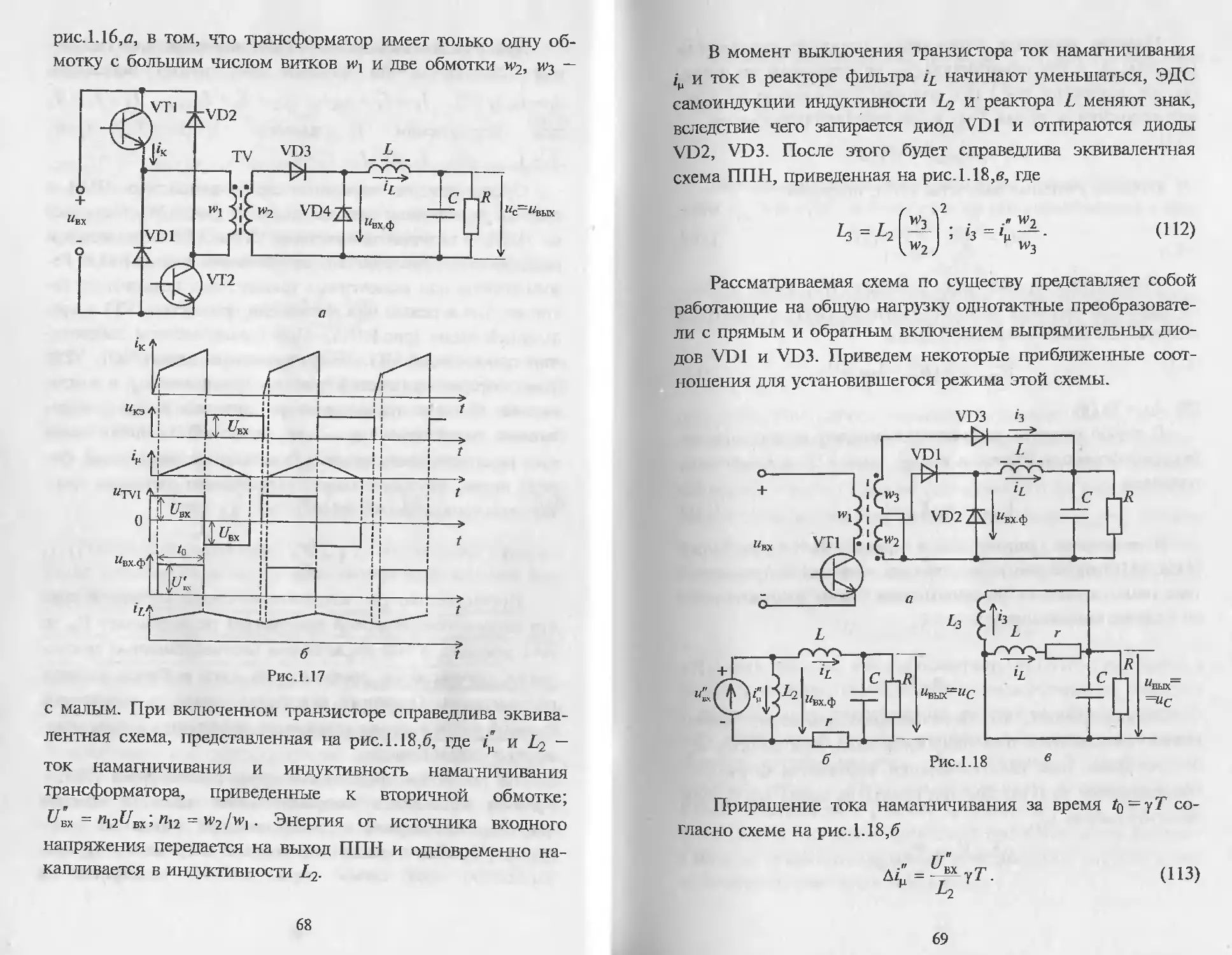
схеме, представленной на рис.1.16.о, применяются в однока-
нальных источниках питания мощностью до 50 — 70 Вт.
4з VD3
VD1
VD2
62
Нарастание тока коллектора при включении транзистора
ограничивается индуктивностью рассеяния трансформатора
Ls. Фронт импульса напряжения на входе фильтра ивхф
формируется с задержкой относительно момента начала на-
растания тока iK:
(104)
где = 1}п}2 — значение тока реактора фильтра в момент
формирования фронта, приведенное к первичной обмотке
трансформатора; и12 = иъ/и’, — коэффициент трансформа-
ции от первой обмотки до второй. После этого процессы в
£С-филътре протекают так же, как и в понижающем ИСН
при включенном регулирующем транзисторе.
Если ввести вектор состояния хф =||/7, «с Г и заменить
иЕХ на и'т = «рИвх, то для данной схемы справедливы уравне-
ния (1) — (46). Однако необходимость полного размагничива-
ния магпитопровода трансформатора за время, пока транзистор
выключен,накладывает ограничения на параметры схемы.
При выключении транзистора VT1 открывается обрат-
ный диод VD2, закорачивая вход ЛС-фильтра. Влечение ко-
роткого интервала спада коллекторного тока напряжение
на транзисторе может возрасти до значения UBX + Lj'ihcT
Подключение параллельно выключаемому транзистору конден-
сатора Q согласно рис.1.15,с устраняет этот выброс напряже-
ния. Вэтом случае обратный диод VD2 открывается лишь в мо-
мент, когда конденсатор Ск зарядится током i'L до напряжения
Пвх, после чего энергия, накопленная в индуктивности рассея-
ния трансформатора передается конденсатору Q.
За время to включенного состояния транзистора ток на-
магничивания трансформатора изменяется согласно формуле
63
i _ Г + ^BX t
lu - M + д '»
где Li — индуктивность намагничивания трансформатора.
В момент выключения транзистора ток намагничивания,
равный 1^2 = + ^вх^о Ш , переключается во вспомогатель-
ную обмотку w3, которая через диод VD3 подключается к ис-
точнику входного напряжения U^. Начальное значение тока
в обмотке w3 равно гДе и1з = ~ коэффициент
трансформации от первой обмотки к третьей. Вследствие
этого энергия, накопленная в трансформаторе,возвращается в
источник £7ВХ, а ток намагничивания в установившемся ре-
жиме уменьшается до начального значения Zgl. Приравнивая
значению ток намагничивания в конце периода Т, получа-
ем условие непрерывности тока намагничивания
1
у = г~—’
1 + «13
что возможно только при одном значении у. Следовательно,
при изменении у должен обеспечиваться режим прерыви-
стого тока намагничивания, когда время спада тока намагни-
чивания меньше (1-у)Г:
и13у<1-у.
Отсюда следует условие прерывистости тока намагничивания
Y<rJ— (Ю5)
1 + «13
Коэффициент трансформации п13 существенно влияет на
напряжение, прикладываемое к выключенному транзистору:
^кэтах = td 1 + — I- (106)
KJ-IIldA ВЛ 1^1 4 '
I й1з7
В литературе рекомендуется выбирать и13=1, т.е. w3=W]
[15]. При этом условие (105) принимает вид у < 0,5. Однако
64
в ППН с повышенным входным напряжением может ока-
заться целесообразным выбирать nl3 > 1 (w3 > wt), что соглас-
но (105) уменьшает допустимое значение у.
В данном случае остаются справедливыми соотношения
(92) — (98) для расчета параметров элементов £С-фильтра.
В случае ППН с повышенным входным напряжением,
предполагая использование транзистора определенного типа,
находим отношение UK3 max /UBX тах и из равенства (106) оп-
ределяем коэффициент трансформации
и _ W3 _ f ^кэ.тах
п13 - “ 77-----1 ’
W1 к вх.тах )
где значение 6/кэ тах для надежности берется на (20 — 30) %
меньше максимально допустимого напряжения коллектор-
эмиттер в режиме переключения. Затем из условия (105) на-
ходим Утах-
В случае низкого входного напряжения ППН
(t4x max< 200 В) целесообразно задаваться /7]з = 1, после чего
выбирается ущах из условия (105).
При расчете коэффициента трансформации
W2 ^вых +
wl Ymax^Bx.min
сопротивление, учитывающее активные сопротивления об-
моток трансформатора и реактора фильтра, дифференциальные
сопротивления включенных транзистора и диода VD1, будем
оценивать по формуле
Чмкх
где т] — желаемое значение КПД преобразователя без учета
потерь мощности в магнитопроводах трансформатора и реак-
тора фильтра. Тогда находим
«12 = (2-л')—> (Ю7)
Углах*-' Bx.min
65
Расчет трансформатора основывается на формуле для
определения числа витков первичной обмотки
W1 =
t/BXY-104
f^BKcsc ’
(Ю8)
где Ай — изменение индукции магнитопровода за время
включенного состояния транзистора, которым задаются; Sc —
площадь поперечного сечения магнитопровода, см2; Кс — ко-
эффициент заполнения сечения магнитопровода сталью.
Площадь окна магнитопровода, занимаемая обмотками, см2:
ОК
= ю-2у2£ц
где I, — действующее значение тока в z-й обмотке; w, — число
витков z-й обмотки; КМ1 — коэффициент заполнения окна
медью для z-й обмотки; б,- —плотность тока в z-й обмотке,
А/мм2. Полагая плотность тока 5,- и коэффициент заполне-
ния KMi одинаковыми для всех обмоток, получаем
*$ок -
+п12^2 +я1зЛ)Ю 2-
(W9)
Подставляя выражение (108) в (109), находим произве-
дение площади окна на площадь поперечного сечения маг-
нитопровода:
С с , ^вхТ(Л + и12^2 +я1зЛ)102
ок с №>К„КС
(110)
используемое для выбора магнитопровода. Коэффициент за-
полнения окна медью Км= 0,2 — 0,4. Эта величина во всех
случаях использования проводов круглого сечения меньше л/4.
В высоковольтных трансформаторах большую часть окна за-
нимает изоляция и коэффициент Км уменьшается. В более
мощных трансформаторах выбираются меньшие значения
плотности тока 5. После выбора магнитопровода определяет-
ся число витков по формуле (108), а затем w2 = n12W’1,
w3 =
66
При определении действующего значения тока первич-
ной обмотки Ц по формуле (94) нужно подставить
h = *0, ^3=0, Л=Л=«12Л> Л~Л+^ц.тах5 Л=Л=0>
при определении /3 принять Г]=(1-у)7\ г3=0,
Л = Ах.тах/П13 > -2=0, /3=/4“0.
Существует ряд вариантов схем однотактных ППП с
прямым включением выпрямительного диода. Мостовая схе-
ма ППН, в которой транзисторы VT1 и VT2 включаются и
выключаются одновременно, представлена на рис. 1.17,с. Ре-
жим работы при включенных транзисторах практически та-
кой же, как и режим при включении транзистора VT1 в пре-
дыдущей схеме (рис. 1.16,с). При одновременном выключе-
нии транзисторов VT1, VT2 открываются диоды VD1, VD2,
через которые замыкается ток намагничивания /р, а к пер-
вичной обмотке трансформатора прикладывается отрица-
тельное напряжение «tvi = ~ивх (рис. 1.17,6). Время спада
тока намагничивания равно t0, как и время нарастания. От-
сюда видно, что длительность включенного состояния тран-
зисторов удовлетворяет неравенству
У = ^<0,5. (III)
П еимущество рассматриваемой схемы состоит в том,
что напряжение на любом транзисторе не превышает во
всех режимах, в том числе и при неодновременном выклю-
чении транзисторов, например, за счет разброса времени
рассасывания. Основные недостатки схемы — усложнение
силовой части и схемы управления, увеличение потерь мощ-
ности В-Силовой части.
На рис. 1.18,о представлена схема однотактного ППН с
прямым включением выпрямительного диода, в которой
энергия, накопленная в трансформаторе,, передается в на-
грузку [15]. При повышенном входном напряжении UBX пре-
имущество этой схемы перед схемой, показанной на
67
рис.1.16,о, в том, что трансформатор имеет только одну об-
мотку С большим ЧИСЛОМ ВИТКОВ М>! И две обмотки W2, И>3 —
с малым. При включенном транзисторе справедлива эквива-
лентная схема, представленная на рис.1.18,б, где i' и “
ток намагничивания и индуктивность намагничивания
трансформатора, приведенные к вторичной обмотке;
^бх = л12^вх5 ni2 = w2/W]. Энергия от источника входного
напряжения передается на выход ППН и одновременно на-
капливается в индуктивности Lq.
68
В момент выключения транзистора ток намагничивания
I и ток в реакторе фильтра iL начинают уменьшаться, ЭДС
самоиндукции индуктивности и реактора L меняют знак,
вследствие чего запирается диод VD1 и отпираются диоды
VD2, VD3. После этого будет справедлива эквивалентная
схема ППН, приведенная на рис. 1.18,в, где
(И2)
Рассматриваемая схема по существу представляет собой
работающие на общую нагрузку однотактные преобразовате-
ли с прямым и обратным включением выпрямительных дио-
дов VD1 и VD3. Приведем некоторые приближенные соот-
ношения для установившегося режима этой схемы.
Приращение тока намагничивания за время tQ = yT со-
гласно схеме на рис. 1.18,6
ТГ"
(113)
69
Полагая выходное напряжение идеально сглаженным
(*/Вых=^вых), а ток намагничивания непрерывным во време-
ни, на основании рис 1.18, в находим приращение тока на-
магничивания во время Т— 4), когда транзистор выключен:
Дг3 - -UВЬС! (I - у) £/£3 .
Отсюда, учитывая равенства (ИЗ), получаем
д£=^^-(1-у)Г. (114)
L2 и3
Приравнивая правые части равенств (113), (114), получа-
ем обычную формулу для однотактного ППН с обратным
включением выпрямительного диода:
ивых = nl3UBK Ь , (115)
1-у
где а,з = w3/w{.
С другой стороны, рассматривая передачу напряжения че-
рез трансформатор (обмотки wb w2), диод VD1 и £С-фильтр,
получаем
^ВЫХ ~ «П^фУ^вх- (Н6)
В результате приравнивания правых частей уравнений
(115), (116) приходим к заключению, что при непрерывном
токе намагничивания установившийся режим возможен толь-
ко в случае выполнения условия
Отсюда следует, что целесообразно применять только
режим прерывистого тока намагничивания, при котором ве-
личина спада тока намагничивания выражается формулой,
получающейся из (114) заменой (1—у) Г на время спада тока
намагничивания
(118)
1^2 ’^3
70
Остается справедливой формула (116) для определения
среднего значения выходного напряжения. Из соотношений
(113), (118), (116) находим время спада тока намагничивания
Нормальная работа схемы возможна при выполнении ус-
ловия tci)1 < (1 - у)Т, которое с учетом (118) преобразуется к виду
Г<1—(120)
«12-^ф
Ограничение на выбор параметров схемы накладывает также
возможность повышения напряжения на закрытом транзисторе
^кэшах + (121)
I «13 J
при неудачном выборе параметров. Отсюда видно, что для
уменьшения напряжения на закрытом транзисторе необхо-
димо выбирать малые значения у и уменьшать отноше-
ние п]2/йв ~ w2/w3 - Однако согласно (120) во избежание па-
боты в области слишком Малых у отношение п12/п13 должно
быть больше 1. Подставляя в (121) вместо у правую часть не-
равенства (120), можем просто оценить возможное напряже-
ние на выключенном транзисторе:
^кэ.тах < ^вх^ф ^12 А* 13 *
Таким образом, анализ однотактного ППН с передачей в
нагрузку энергии, накопленной в трансформаторе, сводится
к рассмотрению параллельной работы на общую нагрузку
Двух однотактных преобразователей: параллельно основному
преобразователю включен вспомогательный однотактный
преобразователь с обратным включением выпрямительного
Диода, работающий в режиме прерывистого тока. Для дина-
мики важно, что рассматриваемый преобразователь работает
в области сравнительно малых относительных длительностей
включенного состояния транзистора у.
71
2. УРАВНЕНИЯ СИЛОВОЙ ЧАСТИ ПОВЫШАЮЩЕГО
ИМПУЛЬСНОГО ППН
2.1. Уравнения состояния повышающего ППН
В процессе работы повышающего ППН (рис.2.1,с) из-
меняется структура силовой части. Первая структура
(рис.2.1,6) соответствует включенному транзистору и вы-
ключенному диоду, когда схема состоит из двух независимых
линейных цепей и справедливо уравнение
хф ^н.фх Ф + Вц.ф^ф > (1)
где
_!1 о т 0
^Н-Ф — L 1 ; Вн.Ф - L ; (2)
о ----- о -i
RC С
ХФ = || Ч’ ис Г ~ вектор состояния с физическими коорди-
натами; ¥ф = ||ывх, /ВД||Т — вектор внешних воздействий. Здесь
матрица А„ ф совпадает с (1.70),а матрица Ви ф — с (1.3).
Решение уравнения (1) для очередного интервала вклю-
ченного состояния регулирующего транзистора Го, начинаю-
щегося в момент времени t = пТ, имеет вид
72
Хф(/) = Нф(t - пТ)*ф(пТ) + Кф(t - пТ)Уф(пТ), (3)
где матрицы Нф(/) и R^(0 находятся из соотношений
° II
. к ®ф(0 -
лф2(0||
йф1(0 = e-^L ; Лф2(0 = е’Г/ЯС;
нф(0 =
Дм (О о II
о ^>2(0 Г
(4)
Дм(0 = I [1 - лф.(г)]; Д>2(0 = -R [1 - лф2(О],
ri
совпадающих с (1.72) - (1.74).
Временные диаграммы для повышающего ППН изобра-
жены на рис.2.2, где нр — напряжение на реакторе.
Подставляя в (3) t — nT+tQ, получаем значение вектора
состояния в момент выключения транзистора
Хф(п7 + Го) = Нф(?0)Хф(кТ) + Еф(Г0)Уф(иТ). (5)
После выключения транзистора и включения диода обра-
зуется вторая структура (рис.2.1,в), совпадающая со схемной
структурой понижающего ППН при включенном транзисторе
(см. рис. 1.1,б) Для рассматриваемой структуры при замене со-
противления г на г2 остается справедливым уравнение (1.2), а
также (1.14), в котором нужно заменить пТ на пТ+Iq. С учетом
сказанного на интервале, когда транзистор выключен, получим
73
хф(О = Ф(^-и^-^)хф(иТ + /о) + Вф(^-/17’-^о)¥ф(/17’ + /0), (6)
где уф(лГ + Z0) = ¥ф(иТ), поскольку согласно принятому до-
пущению внешние воздействия иЕХ(0, /11д(/) остаются посто-
янными на интервале пТ< t< (п+1)Т.
Подставляя в (6) / = (л+1)Г и учитывая выражение (5),
получаем разностное уравнение
хф[(п + 1)Г] = Ф(Г - /0)Нф(/0)Хф(иП +
Г ! (7)
+ [ф(7 - Г0)Кф(,0) + Вф(Г - Г0)]¥ф(лП,
отличающееся от уравнения (1.17) для понижающего ППН в
первую очередь тем, что в него входят две переходные матрицы
Ф(/) и Нф(0, соответствующие двум возможным структурам.
При постоянной длительности уравнение (7) линейно и
заменой
Аэ.ф = Ф(Т - *о)Нф(го), Вэф = Ф(Т - Г0Жф(г0) + Вф(Т -t0) (8)
приводится к общему виду для линейных дискретных систем
с постоянными во времени параметрами,
Хф[(л + 1)Т] = А3.фХф(лТ) + Вэ.фТф(и7У (9)
Решение уравнения (9) для этого случая имеет вид
Хф(УТ) = АэфХф(0) + Вэ.фУф(£Г), (10)
к=0
где #=1,2,... Нахождение переходной матрицы состояния
А^ф здесь, в отличие от соотношения (1.46), представляет
некоторые сложности. Одним из методов, облегчающих вы-
. Л?
числение матрицы Аэ ф, является метод, основанный на тео-
реме Кэли-Гамильтона [10], согласно которой матрица АЭф
удовлетворяет своему характеристическому уравнению
det(zl-Аэф)=с(г) = 0,
где c(z) “ характеристический многочлен матрицы Аэ ф.
74
Пример. Пусть
Z2 + + С2 =0
есть характеристическое уравнение матрицы Аэф. Тогда
Аэ.ф + й1Аэ.ф + fl2' ~ ®> (Н)
откуда просто вычисляется квадрат матрицы А^ф = - с21.
Умножая уравнение (11) на матрицу Аэф, получаем
Аэ.ф + С1Аэ.ф + с2Аэ.ф =
откуда А3,ф = -а^ ф - с2Аэф и т.д.
Уравнения с относительными координатами вектора состояния
При выборе относительных координат xi=R6ii/K$U6,
хг=ис1К^иъ, где 7Сф =/?/(/? +г), rt=r2=r,
Тф^КфЬС, для интервала т0=г0/Гф включенного состоя-
ния транзистора вместо уравнения (1) получим
x = A'Hx + B,,v, (12)
где х = ||х„ х2||т; v = ||v15 v2||T; v1=uBX/C76; v2 =iKAR6/JCii>U6.
Здесь как и в (1.31),
х = Похф; v = Пр^, (13)
а матрицы По и П! совпадают с (1.32) при Афо = Аф.
Учитывая, что
dx .. dxA
х = “Х = 7фП0/,
ах at
из уравнения (1) получим равенство
х - ^фЦ) - )фПоАн.фхф + 7фП0Вн фУф =
= 2фП0Ан фП0’х + 7фП0Вн фП] ’v.
Сравнивая это равенство с (12), получаем выражения
А„=ГфП0Ан.фП0'; В^ТфПоВифП/, (14)
позволяющие при заданных матрицах перехода По и П1 оп-
ределить матрицы А'„ и Вн по известным Ан ф и Вн ф.
75
Используя ранее приведенные выражения для матриц
По, П1, Щ1, и равенства (2), получаем:
Rq О
В _—45
0 1
1
•\Д ф
о
ГФ.
КФ О
О
(16)
где приняты прежние обозначения:
Решение уравнения (12) для интервала т0, начинающего-
ся в момент т = лтп, имеет вид
х(т) = Н(т -итп)х(лтп) + R(t - лтп)у(лтп), (17)
где
вдТот>
II О MT)|I
/г](т) = Л2(т) = е
'Ар
/?1(г) О
О Л2(т) ’
(18)
(19)
76
Пример. Обосновать выражения (17) — (19), не пользуясь матрич-
ным дифференциальным уравнением (12).
Для схем замещения (рис.2.1,6) для и = 0 можем записать:
/£ = г1(ок^ + ^(1-е^),
г (20)
ис = ис(У)е^кс - iHBR (1 - e"'RC).
Умножая первое равенство на R6/K^U6 , второе — на l/K^U6 и
учитывая, что относительное время т = t/T$ , получаем
где
х, = xj (0)е Кф f 1 - ’/е°
(21)
RC
RC
ивх ^6 _ Qo v . гн.д^ _ 'нд-^б 7? _ 9б v
“г Кфиб ~ Кфд 1 ’ Кфиб ~ Кфиб R^q2
Введя векторы х = ||х, х2 ||т, v = || v1 v2 ||т, равенства (21) можно
переписать в матричной форме (17) (для п = 0):
х(т) = Н(т)х(0) + R(t)v(0), (22)
откуда очевидны выражения (18) и (19)
Заметим, что если принять =R, то q$ = q и становится
на один относительный параметр меньше. Однако тогда затруд-
няется учет влияния на процессы изменений сопротивления
нагрузки R, поскольку изменение R приводит к тому, что при
постоянных ii и гнд будут меняться относительные величины
х, и уг- С этой точки зрения следовало бы отказаться и от
деления на коэффициент при определении относитель-
ных величин х'2, v2, но обычно Хф =4 и мало зависит от R.
Решение уравнения состояния для интервала, когда
транзистор выключен, получается из равенства (1.37) заме-
ной птп на итп+ то;
77
х(т) = А(т -итп - т0)х(лтп + т0) + В(т -итп - T0)v(mn + т0), (23)
где v(mn +Xo)=v(«Tn).
Выражая из (17) значение вектора состояния в момент вы-
ключения транзистора
х(лтп + т0 ) = Н(т0 )х(птп ) + R(t0 ) v(mn ) (24)
и подставляя в (23), при т = (л + 1)тп получаем разностное
уравнение
х[(« + 1)тп]= Afrn -то)Н(*о)*(«'гп) +
+ [А(тп -to)R(to)+ В(тп - -r0)]v(«Tn). (25)
При постоянной длительности т0 уравнение (25) линейно и
переписывается в виде
х[(и + 1)тп ] = Аэх(лтп) + Вэу(«тп), (26)
где
Аэ = А(тп -т0)Н(т0); Вэ = А(тп - т0 )R(x0) + В(тп -т0). (27)
В этом случае переходные процессы рассчитываются по
формуле
х(№п) = А3х(0) + £Af~k~l Вэт(лтп), (28)
*=0
аналогичной (10)
2.2. Соотношения для расчетов повышающего ППН
методом усреднения
Метод усреднения эффективен при решении ряда задач
анализа и синтеза и широко применяется, в частности, для рас-
четов статических характеристик, хотя определенные детали
процессов, иногда очень важные, не могут бьпъ им обнаружены.
Режим непрерывного тока
Интегрируя уравнение (1) за время Го и уравнение (1.2)
за время Т - Iq, при внешнем воздействии, равном
¥Ф = || мвх> *н.д ||Г на всем периоде Т, получаем
78
~ ДХф(Т) = уА'нф ГхфЛ +
т ° ° т <29)
+ (1 - r)AL» 7~, (хфЛ + В„ф <¥фЛ.
1 to‘0 1 О
В случаях, когда приращение вектора состояния за период Т ма-
ло, т.е. нормы векторов ||Ахф(Т)| и ||хф|| удовлетворяют условию
|лХф(Т)||«||хф||,
можно принять
1 го 1 г
- fХФЛ “ (ХФЛ “ хФ-ч> (30)
Кроме того,
уРфЛ = ¥ф.ср. (31)
о
Тогда уравнение (29) преобразуется к виду
~ ^н ф.ерХф.ср Вц.ф^ф.ср’ (32)
где усредненная матрица непрерывной линейной части
^н.ф.ср “Т^н.ф *" (1 Т)^н.ф- ( 1
С учетом выражений (2) и (1.3) имеем
Г 1-у
^Н-ф.Ср L 1-у L 1 (34)
С RC
где г = у/[ + (1 - у)г2 ~ усредненное активное сопротивление
в схемах замещения ППН (рис.2.1,6 и в), включенное после-
довательно с индуктивностью.
При расчетах переходных процессов методом усреднения
величину ДХф (Т)1Т принимают за производную 6хфср/Л и
получают дифференциальное уравнение
79
L фср^д 4.R V
~ Х*Н.ф.СрЛф.Ср "н.ф*ф.ср»
(35)
которое имеет одинаковый вид в понижающем, повышаю-
щем и инвертирующем ППН. Однако, если в понижающем
ППН матрицы, входящие в уравнение (35), не зависят от
длительности t0 = yT, то в повышающем ППН матрица
АНфСр, а в инвертирующем ППН обе матрицы АНфср и
Вн.ф.сР зависят от t0.
В установившемся режиме АХф(Г) = 0 и из (32) находим
хф.ср ф Ср Вн фУф Ср, (36)
где обратная матрица
Ан.ф.Ср ~ (det Ан ф ср) adjAH(})Cp,
det Анфср —
(1-y)2 +4; adjA
Ь/С- i\
н.ф.ср
1
RC
1-у
1~ Y
L
r
~ L
и, следовательно,
^н.ф.ср
-1
L
RC
1-Y
1-у
(37)
R
L
L
Произведение матриц
1
R
A “1 T>
н.ф.ср пп.ф
(1-Y)
(38)
-(1-у)
Векторно-матричное соотношение (36) теперь сводится к
двум равенствам'
Щр = г, J ,.j% + - т)
(1-у) + r/RL R J
ВЫХ
(1-у)2+г/1Л Л/ндс^’
(39)
(40)
U
R
80
Уравнение (40) определяет регулировочную характери-
стику ППН. Подставляя в него /ндср = /н -UBbaJR и решая
относительно ?7ВЬК, находим выражение для внешней харак-
теристики
U г
= , вх (41)
1-Y (1-у)2
где ZH — среднее значение суммарного тока нагрузки.
Введя в (40) параметр = R/(R + г), т.е. замену
г/R = (1 - )/Кф, запишем регулировочную характеристику как
^вых _________^Ф__________ 1 _ 1 ^Ф ^Н.д.ср^
^вх 1_^ф + ^ф(1~у)2 ч Кф ^вх ,
(42)
Исключение тока /н.д.ср из уравнений (39) и (40) дает
выражение
/£.ср = 1^вх-г/вьК(1-у)Ь
F г
из которого с учетом (41) будем иметь
Л.сР = 1^- (43)
1-у
Другие методы расчета статических характеристик
На практике для расчета силовой части ППН обычно
пользуются упрощенными соотношениями, основанными на
допущениях о малости пульсаций выходного напряжения
ис~ ивых и потерь энергии в элементах схемы. Обоснован-
ность такой приближенной методики расчета проверяется
при помощи точных соотношений и экспериментальных ис-
следований на макетах. При указанных допущениях на ин-
тервалах 1Ь и Т - to ток реактора iL изменяется по линейному
закону, как показано на рис.2.2:
z£ - (to + 0 < >
и -и <44>
‘L - ‘М + " , (г - <0), 'о <' < т.
1а
81
Поскольку нарастание тока за время to, определяемое из
первого уравнения (44), д/ = /2-/1, где ^=^0, /2='г(/о),в
установившемся режиме по модулю равно спаду тока за вре-
мя Т - /о, то справедливо равенство
Отсюда получаем формулу для расчета регулировочной
характеристики
^вых=^Ч (45)
1-у
которая, однако, для этой схемы дает значительную погреш-
ность из-за более сильной зависимости £/ВЬ[Х от сопротивле-
ния г, чем в понижающем ППН.
Для уточнения формулы (45) запишем уравнение по вто-
рому закону Кирхгофа для средних значений:
*4 ~ 4ср г + ^кэ.ср’ (46)
ще согласно рис.2.2 среднее значение напряжения на транзисторе
£/ СП - 4ых ~~ ~ 4ых (1 ~ У)
1)Ыл ГТ1 nblA, X i /
Тогда из этих двух уравнений получим
U г
<47>
1-у 1 -у
Из схемы ППН (рис.2.1,о) следует, что средние значения
токов диода и нагрузки одинаковы:
4.ср — 4 »
поскольку среднее значение тока конденсатора в установив-
шемся режиме равно 0. Определяя среднее значение импуль-
са тока диода непосредственно по рис.2.2, получаем
Т - t
4ср = 4.ср = /£.ср(1 - Y) = 4 =
откуда следует равенство (43).
82
С учетом равенства (43) из (47) следует выражение (41).
Таким образом, расчетные соотношения (39) — (43) можно
получить по изложенной упрощенной методике, не пользуясь
уравнением (32).
Для уточнения полученных соотношений можно вместо
линейного закона изменения тока iL (44) принять более точ-
ный экспоненциальный закон:
i = fz. - k* V'/7* + £•« , 0 < t < t0,
{ r J r
r (48)
i = (I _ ---^вых L TL + £bx-^вых , to<t<T^
\ r ) r
где TL = L/r — постоянная времени цепи индуктивности L.
Подставляя в первое выражение t = tQ, iij=l2, во второе —
t=T, iL=h> получаем уравнения:
Л = (I, - £*kL + к* • I, = f Z, - kckktk + €к -.^вых
I г J г к г ) r
где а = e'tn^L, b = . Из этих уравнений:
J _ ^вх _ ^вых . j _ ^вх _ ^вых Q (1 ~ ^).
1 г г 1-аЬ’ 2 г г \-ab ,
а/ = / -/j =
г 1-аЬ
Поскольку среднее значение тока нагрузки ZH = 7д ср,
интегрируя второе равенство (48) за время Т- Iq, получаем
/н = у ^2 " Usx (1 - Ь) + ^вх ~ (1 - у),
откуда с учетом (49) будем иметь соотношение
г _ ^вых (1 — °)(1 — Uих ~ UBbIX . _ . (5ГЙ
И~Т г l-ab г ц
связывающее значения ZH, и ивых и позволяющее строить
внешние и регулировочные характеристики ППН. Решая
83
уравнение (50) относительно выходного напряжения, полу-
чаем выражение для внешней характеристики
ТТ — ~ У) ~ -^н (е 1 \
БЬИ ! т ^(1-с)(1-^> (51)
Т 1-аЬ
которое при замене экспонент а, b и ab линейными частями
разложений в степенные ряды переходит в (41).
Режим прерывистого тока
В режиме прерывистого тока реактора iL повышающего
ППН (рис.2.3) появляется дополнительный рабочий интер-
вал, на котором транзистор и диод выключены, ток реактора
iL = 0, конденсатор разряжается на нагрузку.
Поскольку ток iL имеет импульсную форму, интеграл тока
iL за время паузы Т - /0 - tc равен 0, усреднение вектора Хф,
как это делалось в режиме непрерывного тока, может привести
к значительной погрешности расчетов переходных и устано-
вившихся режимов. Поэтому поступим следующим образом.
Интегрируя уравнение (1) за время /0, уравнение (1.2) за
время tc и уравнение
_____ £ ,, _ гН-Д ’/мч
dt RC с С )
84
за время Т - t0 -tc, получаем точное равенство
— yAh ф
1
7- ГхфЛ + усА
° о
_1_
н.ф
*с
to + tc
-
?<1
1-Y-Yc
RC
,1
Т -10 -tc J
|Ь+<с
1-Y-Yc
С
1 г
--------- ft-Л
О
о
1
+ (у + Ус )Ви Ф
to + tc
(53)
о
t0 и ic изменяется поч-
Поскольку ток iL на интервалах
ти по линейным законам, локальные средние значения токов
fO+,c
мало отличаются. Локальные средние значения напряжения
ис на интервалах t0, tc и Т -10 - tc мало отличаются в свя-
зи с выбором достаточно большой емкости С для получения
малых пульсаций выходного напряжения. Поэтому и в дан-
ном случае можно положить
। ‘о ] <0+,с ।
- [хфл “ г [хф dt а хф ср л; т—- f«c* «t^cxp,
In • Ir J I — In - lr J
u 0 c 0 и c ,o+,c
где, однако, токовая координата вектора хфхрл представляет
собой локальный средний ток Л,.срл (средний за время
+tc), а не средний за период Т. Но, как и в режиме не-
прерывного тока, интеграл
। f0+*c
t t /УФ^ = ¥ф-ср
Й)+'с oj
85
есть среднее значение вектора внешних воздействий. С учетом
сказанного из равенства (53) получим приближенное соотношение
О
1-У-ус
Лф.ср.л RQ
Т Ьис(Т) ^Лнф
+ (у + Ус)Вн.ф*ф.ср - "
О
^С.ср
которое, учитывая очевидные равенства
I ° L 0 °ll II 0 I-11° °11
рС.ср|| 0 1|Гф-Ср-Л’|/нл.ср| || О 1|PC₽’
представляем в виде
£
Т
О
Аыс(?)|
Ац.ф.ср Хф.ср.л + Вн ф Ср¥ф Ср,
(54)
где
А2
т -vA' А 1 ~ У ~ У,
н.ф.ср Улн.ф +УсЛнф
О О
О 1
УП + УЛ
L
Ус
С
_Ус
L
1
RC
(55)
Вн.ф.ср — (у + Ус)Вн.ф -
о о
О 1
У + Ус
L
О
О
1
(56)
Поскольку локальное среднее IL ср л и
Т значения тока связаны равенством
среднее за период
Г _ J£.cp
7 Т.ср.л —
У+ ус
и, соответственно:
Хф.ср л
1 Деря
^С.ср
1
У+ Ус
о
О
1
ХФ-ср ’
86
соотношение (54) преобразуется к виду
1
Т
О
Дис(Т)
_ A v
^н.ф.ср лф.ср
+ ®н.ф.ср^ф.ср >
(57)
где
Ац.ф.ср
- Ал
- ^н.ф ср
1
У + У,
о
О
1
ул + усг2
г - J-1—Lt.4 _ усредненное
У+ Ус
тивление цепи реактора L и
диода.
В установившемся режиме
шения (57) получим равенство
к - -А'1
лф.ср ~ "н.ф.ср
аналогичное (36). Поскольку
бе1Анфср
( Ус
1у + Ус
А'1 с
''н.ф.ср
= LC
Ус
L
1
L
Ус
(у + ус)С RC
за период Т активное
(58)
сопро-
включенного транзистора или
Днс(Т) = 0, поэтому из
^н-ф.ср^ф.ср ’
adj Ан ф ср
(У + Ус R)
а произведение матриц
А1 В
'‘н.ф.ср н.ф.ср
Ус г
———+ —
У + Ус R
равенство (59) эквивалентно двум:
Г И,
1
„ср
соотно-
(59)
__L
RC L
(yJyJC L
1 Ус
RC L
Ус _£
(у + Ус)С L
У + Ус
R
-Ус
-Ус
Г
2 К \ , п п (у + Ус)+ ^н д.срУс »
Ус/(у + Ус) + ^/7?1 R J
(60)
(61)
87
Uвых ~ 2 (Ус^вх г^н.д.ср)> (62)
_Ус + Г
У + Ус
где Uвьге = 6'сСр •
На границе режима прерывистого тока у + ус = 1, и ра-
венства (61), (62) совпадают с (39), (40).
Подставляя в равенство (62) /н.д.ср = /н -6<вых//? и решая
относительно С7ВЫХ, находим выражение для внешней харак-
теристики ППН
и = Lils.ц _у±1с_г/ (63)
17 ВЫХ U ВХ 7 * VJ-v
Ус Ус
которое нужно дополнить соотношением для определения
времени спада тока ус.
г 1 — К
Произведя в (62) замену — = —получим выраже-
Л Лф
ние для регулировочной характеристики
^вых , КФ
U V2
вх l-A'jj + A'ф-^~
Y + Ус
1 _ т
_ Ф Н.д.ср
4 С TZ
Лф
ГТ
Ь ВХ
(64)
Выражая дополнительный ток нагрузки /н дср из урав-
нения (62) и подставляя в (61), преобразуем его к виду
L.cp [б'вхСу+Ус) 6^вь1ХУс]/г, (65)
из которого с учетом (63) получаем
/двр=х±^4- (66)
Ус
Если основываться на малости пульсаций напряжения
«С и потерь мощности в элементах схемы, приближенные
соотношения (61) - (66) могут быть получены и без исполь-
зования (57)
88
Подставляя в (46) выражение для среднего значения на-
пряжения на транзисторе в режиме прерывистого тока
^кэ.ср = ^выхТс + — Y ~ Yc)>
получаемое непосредственно из кривой икэ (рис.2.3), прихо-
дим к уравнению (65).
Имеем уравнения для средних значений токов
At.cp = ^к.ср 1 Л1.ср > Л1.ср ~ 4 • (67)
В связи с тем, что через транзистор проходит незаштрихо-
ванная часть импульса тока iL (рис.2.3), а через диод - за-
штрихованная часть, можем записать:
ЛссрЦлл; 4cp=pHYc. (68)
где 1т — амплитуда импульса тока //, а изменение тока на ин-
тервалах to и /с полагается линейным. Поэтому в соответст-
вии с (44), где /£о = О,
Im = ^уТ = -UJ’LLUJ^.ycT. (69)
L L
Равенство (69) дает недостающую связь ус с величинами у,
6^вх> 6рЬ1Х:
у «------Um- - у. (70)
1 с п _ гг 1 ' ’
° вх v вых
Для уточнения формулы (70) можно вместо линейного
закона изменения тока (44) принять экспоненциальный за-
кон (48).
В режиме прерывистого тока Д = 0, /2 ~ Ап и из (48)
имеем
Jrm=^L(l-^0/7i)> (71)
( Г! - I! X , JJ _ [I
7 _ вх ВЫХ g-t^ilL + ВХ ВЫХ _ Q
I т г J г
89
Из этих двух равенств следует уравнение относительно tc:
g-tcJTt ________^вых/^вх 1________
1-е h/TL + [/ /[/ - 1
ЬЫХ 1 Ьл
(72)
где согласно (62) t/BbK является функцией /с. При замене
экспонент линейными частями их разложений в степенные
ряды уравнение (72) переходит в (70).
Из уравнений (67) с учетом (68) и (69) находим
/z.cP=%^y(y + Yc), (73)
L-J-l
и т
4=^y-YYc. (74)
Z1.J
Откуда следует равенство (66).
Поскольку среднее значение тока нагрузки /н равно
среднему значению тока диода 7Д, интегрируя второе равен-
ство (48) за время tc, при подстановке /2 =Im из (71) находим
выражение, уточняющее (74)'
н
( ^вых _ p-t0/TL 'j (i p-tJTL ) _ Г ^вых _ I 'l
т \ U Г ’ \ U Г
1 У с вх У У ь вх J
(75)
Если при разложении экспонент в ряды в этом выражении
сохранять только линейные части, то найденное значение
тока Ти оказывается в два раза больше, чем по формуле (74).
Для объяснения причины такой большой погрешности за-
пишем выражение (75) в виде
Отсюда видно, что в квадратной скобке вычитаются близкие
величины, которые при линейном приближении экспоненты
дают 0. Ток /н получается в результате суммирования малых
соизмеримых величин и умножения результата суммирования
90
на большую величину Um/r. При линейном приближении
экспонент первое слагаемое в выражении для /н не учитывает-
ся и получается большая погрешность в вычислениях. При
квадратичном приближении обоих слагаемых выражения для
JH с учетом (70) получается выражение, совпадающее с (74).
Таким образом, возможны три варианта приближенных
формул для среднего значения тока нагрузки в режиме пре-
рывистого тока. Первый вариант формулы получается при
подстановке (72) в (75):
ивх
и -U
, вых ^вх
In
\ вх >
(76)
т ^bx^L
н= -f
Разложение логарифма в степенной ряд
1п(1 + х) = х - х2/2 + — и сохранение линейного и квадра-
тичного членов ряда дает выражение:
, 1 U^TL (.
н 2 (Пвых -Uex)rT 1
откуда при разложении экспоненты в степенной ряд и со-
хранении квадратичного члена найдем вторую формулу:
(77)
а при сохранении только линейного члена — третью:
= U^T
н 2(ПВЬ[Х-С/вх)/-Т£‘
(78)
Формула (78) следует и из равенства (74) при подстанов-
ке ус из (70), т.е. соответствует предположению о линейном
изменения тока iL на интервалах to и tc.
91
Соотношения для границы между режимами непрерывного
и прерывистого токов
Точные соотношения следуют из рассмотрения кривой
тока /£ на интервале спада, описываемой выражением (6),
откуда при отсчете времени от начала спада
2i = Фц('К(°) + Ф12(0«с(О) + *Ф11 (0«вх + *Ф12(О»НЛ- (79)
Подставляя в (79) t- T-t0, il = 0, получаем уравнение отно-
сительно граничного значения Zo
Фц(7 ~ ^о)гт(О) + Ф12(7"_ ^o)“c(O) +
+ ^ф11 (7 - to) ивх + ^ф12 (7 - ) 2н.д = ° > (80)
которое используется при расчете переходных процессов.
При расчетах статических характеристик возможно исполь-
зование упрощенных соотношений, не требующих решения
трансцендентного уравнения (80) и включающих в себя не
мгновенные, а средние значения тока и напряжения. Под-
ставляя во второе уравнение (48) t—T, fy-Im из (71) и
решая относительно f/BbK, получаем формулу:
^вх l e-(T-t0)/TL ~ °™ i-b ’ (81)
где а = , b - e~^~*^TL. Эта же формула получается из
(72) при подстановке /с = Т -10.
Среднее значение тока в граничном режиме получается
из (75) при подстановке tc = Т - Го и СВЬ1Х = £7ЗЫХ :
(82)
То же самое получается при подстановке С4ьа = t-вых.гр в (50)
или (76).
Поскольку величины а и b являются функциями /о,
формулы (81) и (82) задают в параметрической форме гра-
ничную зависимость С/вь1хгр от Z .
92
Применяя квадратичную аппроксимацию экспонент а и
Ь, выражения (81) и (82) преобразуем к виду:
и = 2Гь/Г-1 .
ВЫХ.1-Р j_Y 2Т£/7-(1-у)’
/ _^вх (1 )(271/^-y)[71/7--(1-y)] (83)
игр- г И Y7 2(71/Г)2[271/7-(1-у)Г’
а при сохранении только линейных членов рядов — к виду:
^вых.гр ~ ’
и т <84)
f^L
Формулы (84) дают большую погрешность. Первая из них
получается и из (70) при ус = 1 - у , т.е. соответствует пред-
положению линейного изменения тока iL и отсутствию по-
терь мощности в схеме. Если в граничном режиме среднее
значение тока определять из (74) при ус - 1 - у , то получаем
величину
^«%-y(i-y),
в два раза меньшую получаемой из второй формулы (84).
2.3. Построение статических характеристик и расчет
силовой части повышающего ППН
Задаваясь значениями у и рассчитывая граничные значе-
ния тока и напряжения по формулам (81) и (82), записан-
ным в виде:
^ВЫХ.Гр _ I- аЬ . ^Н.грГ _ о _ \ TL_Ь / _ х
t/BX l-b ’ 1 1-я Т
строим граничные кривые (штриховые линии на рис.2.4).
Внешние характеристики в режиме непрерывного тока
рассчитываются по формуле (51):
93
, г
1 — у — -
U™ .. £вх
^вх
г т
I - ab
Внешние характеристики в
строятся по формуле (76):
области прерывистого тока
1 - а
IKr=TL
URX т
-1 |1п
и** J
.^ВЫх/ ^ВХ 1
1 - а -
из которой ивъа/иъх явно не определяется. Поэтому прихо-
дится задаваться значениями у и UBlJx/UKx и рассчитывать
значения I^r/U^.
Как видно из рис.2.4, при увеличении относительной
постоянной времени TLfT с 5 до 10 граничная кривая замет-
но смещается влево, а внешние характеристики в области
непрерывного тока практически не изменяются.
Расчеты по формуле (41) в режиме непрерывного тока
дают результаты, практически не отличающиеся от получен-
ных по формуле (51). Например, для у — 0,8 из (41) получим
94
^вых =5 — 25 ^аГ
^вх ^вх
что совпадает с показанной на рис.2.4 прямой.
Вычисления для области прерывистого тока по формуле
(77), преобразованной к виду
UBX (Т, }31 г’
I т) ивх
также приводят к кривым, близким к показанным на рис.2.4.
Из-за резкого повышения выходного напряжения работа
повышающего ППН в области прерывистого тока нежела-
тельна.
На рис.2.5 представлены построенные по формуле (42)
регулировочные характеристики повышающего ППН в ре-
жиме непрерывного тока при /н д = 0 и трех значениях ко-
Дифференцируя (42) по у, найдем значение ум, при ко-
тором получается максимум регулировочной характеристики,
95
Ум =1-
1-*ф
*ф
(85)
Подставив значение у = ум в (42), получим этот максимум
б'вых, max _ 1
' 2
1 Кф Агд.ср^
~к^ и~в1г
(86)
н.д.ср
На рис.2.6 представлены построенные по формулам (85)
и (86) зависимости ум и 64ых.тах/64х от параметра при
практике повышающий ППН применяется при
поскольку в противном случае система управления
фиксировать наступление максимума регулировоч-
На
У <Ум>
должна
ной характеристики и при у > ум использовать иной закон
регулирования, чем при у < ум.
Другим фактором, препятствующим применению повы-
шающего ППН при у>ум, является снижение КПД с рос-
том у. Для оценки КПД ППН без учета потерь в магнитопро-
воде реактора воспользуемся приближенным соотношением
I £ CD^BX
tSA
которое с учетом равенств (42) и (43) представляется в виде
96
' _ ^фО- ~ y) I _ * ~ ^ф Льд.ср-^
1-^ф +^ф(1-у)2 < ^х /
(о/)
_ 1~у 1-у - ^ндсрГ
(1-у)2+/7Л< ^вх ,
Полный КПД меньше т/, поскольку имеются дополнительные
потери, обусловленные переменной составляющей тока iL, и
потери при переключениях полупроводниковых приборов.
На рис.2.5 штриховыми линиями показаны зависимости ц'
от у. Как видно, из-за значительного снижения КПД повы-
шающий ППН нецелесообразно применять при у > 0,5 - 0,6.
Другой причиной, препятствующей работе повышающего
ППН при больших значениях у, является рост выходного со-
противления с увеличением у. Действительно, согласно (41)
выходное сопротивление в режиме непрерывного тока
^=7-^- (88)
(1-у)“
На рис.2.7 показана зависимость отношения RBbK/r от у.
Это отношение показывает, во сколько раз при одинаковых г
выходное сопротивление повышающего ППН в режиме не-
прерывного тока больше, чем у понижающего.
97
Дополнительные соотношения для расчета
силовой части преобразователя
Для определения параметров элементов силовой части
обычно используются упрощенные соотношения.
Индуктивность дросселя L выбирается так, чтобы при
минимальном среднем значении тока нагрузки 4^ ток
дросселя /£ оставался непрерывным. Для этого минимальное
среднее значение тока дросселя /дсртш должно превышать
половину размаха пульсаций Д//2. С учетом равенств (43) и
(44) получаем условие
j _ А<.min ^вх 'г
zI.cp.min j 2L У '
В связи с тем что при стабилизации выходного напряжения
ППН UBba ~ const, а напряжение (7ВХ меняется, в это усло-
вие в соответствии с (45) подставим t7BX = (1 - у)(7вь[Х и за-
пишем его в виде
L > , (89)
АМн-ПИП
где f=l/T. Сюда подставляется значение у из диапазона от
Ymin =1-^^ до утах min , при КОТОРОМ ПрОИЗ-
^ВЫХ ^вых
ведение у(1-у)2 максимально.
Для оценки пульсаций напряжения на конденсаторе
фильтра ППН учтем, что конденсатор заряжается током
Д '4i при закрытом транзисторе и разряжается на столько же
полным током нагрузки 1В при открытом транзисторе. По-
этому размах пульсаций напряжения на конденсаторе
Дис
ЦуТ 1ау
С fC
С учетом этого равенства коэффициент пульсаций выход-
ного напряжения
X = = Y
п 2ПВЫХ 2fCUB.iX ’
98
(90)
а требуемая емкость фильтра
(j _ Ai.maxY max
^^плоп/^^вых
где ^плоп — Допустимый коэффициент пульсаций. Требуемая
емкость С здесь оказывается значительно больше, чем в по-
нижающем ППН.
При скачкообразном уменьшении тока нагрузки ППН
(за счет либо увеличения скачком сопротивления нагрузки
R, либо снижения скачком тока /нд) начинается повышение
выходного напряжения «с преобразователя, блок управления
прекращает периодическое включение транзистора и образу-
ется схема, показанная на рис.2.1,в. Формируется выброс
выходного напряжения ППН.
Переходный процесс в схеме (рис.2.1,в) описывается вы-
ражением (1.14); принимая в нем п — 0, найдем:
UC =®21(Oz/.(0)+<I>22(Owc(0) + ^<1)21(Z)z/bx +^220zh.aj
где под гн д и R подразумеваются значения после скачка тока
нагрузки; «с(0)« UBta — номинальное выходное напряжение.
С учетом выражений для элементов матриц (1-11) и
(1.13) это равенство запишем как
uc = A. + e
А2 sin <о0/ + Л3 cos to0t + — sin <а0/ ,
V Ю0 7J
н. mm -
где А -К (и -ri )• A Uc(®)/R *н.д _
где Аф(Ивх Г1к.д)> > гп С ’
(JJqV VJqV
А3 = ис(0)- Кф(ивх -гфл); /H min - значение тока нагрузки
после его скачкообразного уменьшения.
Анализируя на максимум выражение для ис, найдем
уравнение для определения момента максимума tM
f t -^2
1----2--
a . +a .
— Л2 + -^-ч—Аз
COq
(91)
99
и формулу для максимума
Ur
С max
= 4 +<га'“
А + Л2 + — А3 tg ю01м
V Юр J
(92)
При малых активных потерях в ZC-контуре (рис.2.1,в)
имеем а « ю0 , »1,
» А/А >
С. щах = А + A J 1 + tg2 ю(7м >
где
А “^вх; А ~-^7 Lzt(o)“ Ai-min]; А ~uc(^)-^w
При малых пульсациях выходного напряжения его зна-
чение «с(0) можно принять равным среднему значению ?7ВЫХ
до скачка тока и вычислить по (41). Тогда значение выброса
напряжения
Л^выбр = ^С.тах ~ис(0Н«С(°)~^вх](Л +И(7м "1)=
= (ивых - t/EX)(jl + tg2^M - 1), (93)
где
t£2 f -
С(£/ВЬ1Х-ПЕХ)2
100
3. УРАВНЕНИЯ СИЛОВОЙ ЧАСТИ
ИНВЕРТИРУЮЩЕГО ИМПУЛЬСНОГО ППН
3.1. Уравнения состояния инвертирующего ППН
Инвертирующий ППН (рис.3.1,а) находит на практике
достаточно широкое применение, например, в виде однотакт-
ного преобразователя с обратным включением выпрямитель-
ного диода. Эта схема, как и повышающий ППН, относится
к преобразователям с переменной структурой силовой части.
Схема замещения, соответствующая включенному тран-
зистору, как и в повышающем ППН, состоит из двух незави-
симых линейных цепей, показанных на рис.3.1,б. Для данной
схемы остаются справедливыми соотношения (2.1) — (2.5).
Временные диаграммы для режимов непрерывного и преры-
вистого токов реактора iL изображены на рис.3.2,о и б.
Схема замещения, соответствующая выключенному тран-
зистору и включенному диоду, показана на рис.3.1,в. Она
совпадает со схемой замещения понижающего ППН при вы-
ключенном транзисторе (рис.1.1,в), поэтому имеет такие же
Матрицы Ф(0 и Вф(/).
101
Полагая, что транзистор выключается в момент времени
t = пТ+to, аналогично (1.14) можно записать
Хф(О=Ф(7-«7’-/о)хф(л7’ + 'о)+Вф(/-иГ-/оЬф(иГ+/0), (1)
где Уф(»Г + г0) = ||0, 1ад(иГ)|т, и согласно (2.5)
хф(и^ + ^о) - Нф(^о)Хф(лГ) + Кф(^о)Уф(яГ). (2)
Подставляя в (1) t= (n+1) Т, с учетом выражения (2) по-
лучаем разностное уравнение
хф [(и+1)Г]= Ф(7 - /0 )Нф (t0 )хф (n Т) + Ф(Т -t0 Жф (t0 )уф (пП+1
________________+Вф(Г-/0)уф(пГ + ;0),______________(3)
где Вф(Т-/0)уф(п7 + /0) = В (Г-/0)/нд(пГ);В (/) - вто-
ср 1р* X
рой столбец матрицы Вф(0-
Поскольку' выполняется равенство
О О
О 1
УфСиТ1 + /0) =
Уф(«Л,
введя обозначения
Аэф =Ф(Г-Г0)Нф(/0),
Вэ.ф = Ф(Г - ^о)Кф(^) + Вф(Г- /0)
° °11
0 1 Г
(4)
102
уравнение (2) при to = const можно привести к виду, общему
для линейных дискретных систем,
Хф[(я + 1)Г] = АэфХф(я7) + Вэ.ф¥(лП. (5)
Для (5) справедливо решение (2.10).
Уравнения с относительными координатами
вектора состояния
В интервале tq включенного состояния транзистора ин-
вертирующего ППН остаются справедливыми соотношения
(2.13) — (2.19). В частности,
х(итп + т0) = Н(т0 )х(лтп) + R(t0 )v(m1,), (6)
где матрицы Н(т) и R(t) определяются выражениями (2.18),
(2.19)
На интервале -гп-т0, когда транзистор выключен, а диод
включен, справедливо равенство (2.23):
х(т) = А(т - тп - т0)х(итп + т0) + В(т - лтп - т0)у(мтп + т0), (7)
где матрицы А(т) и В(т) определяются выражениями (1.41) -
(1.43) при Лф0=Аф и Гс=0. Отличие состоит только в том, что
в равенстве (6) т(итп + т0) = ||0, /нд(«Г)||т = |т(итп).
Поэтому, подставляя в (7) т = (и+1)тп, с учетом (6) находим
разностное уравнение
+ х[(л + 1)тп] = А(тп -т0)Н(т0)х(ит А(тп -T0)R(T0) + B(Tn ~xo)|q i| п) + v(mn), (8)
отличающееся от (2.25).
Уравнения для режима прерывистого тока
В режиме прерывистого тока реактора фильтра iL
(см. временные диаграммы на рис.3.2,б) остается справедли-
вым выражение (2), определяющее значения вектора состояния
103
в очередной момент т = тп+т0 выключения транзистора, ес-
ли принять Хф(л7) = || 0, и^п Т) ||т
Для интервала спада тока tc применимо равенство (1),
подставляя в которое t = пТ + + tc, с учетом (2) получаем
Уф(и7).
ХфСиТ' + /0 +ZC) = Ф(гс)Нф(/0)хф(л7’) +
+ Ф(Гс)Кфао) + Вф(Гс)|О °| Уф(л7).
(9)
Из векторно-матричного соотношения (9) с учетом (2.4)
следуют два равенства, первое из которых
Д (иТ +10 + tc ) - Ф12 (О^ф2 (^0 )иС (п Т) + Ф11 (*с )-^ф1 Оо)ивх (и Г)+
+[ф12^с)^>2(?0)+йф)2ас)]/н.д(ип = о (ю)
служит уравнением для определении времени спада тока tc,
второе равенство
Uc(nT +t0 +tc)~ Ф22(1с)^ф2(^о)нс(л2') + Ф21(/с)7?ф1(^о)ивх(лТ) +
+ [ф22(^с)Д|)2(^о) +^Ф22(/с)]'н.д(и^) (11)
определяет напряжение на конденсаторе в момент выключе-
ния диода и начала паузы тока.
На интервале паузы тока справедлива вторая из схем за-
мещения, показанных на рис.3.1,6, поэтому конденсатор
разряжается согласно уравнению
uc^) = ^2(t-nT-t0 -tc)uc(nT + t0 +tc)-
- *[1 - -nT~tn- Гс))/ад(яГ),
(12)
получаемому из (2.3) при замене пТ на лТ+2о+4 и учете ра-
венства v(«T + lo+rc) = ||O, /н.д(«Л|Г-
Подставляя в уравнение (12) /=(и+1)тп и ис(п 7'+Z0+Zc)
из (11), получаем разностное уравнение
104
иС [(л + 1)^] = *фг(^-?О _/с)Ф22(^с)^ф2(^о)ыс(и^) +
+ *ф2^ “ ^0 ~ ^с)^21^с)^ф1^о)ивх(.п^) +
+ *фг(^ ~*О~ ^с)[®22(^с)-^ф20о) + *ф22 Gc )]гнд (« -
-л[1-йф2(Т-/0-/с)]/ад(иГ),
откуда с учетом равенств (2.5) имеем
ыс[(и + 1)^] = *фг(^ _ ^с)<^22^с) ис(пТ) +
+ *фг(^ - *0 ~ О {*^*21 (^С)^фТ(^о)«вх(«П +
+[ф22 ас)^ф2а0)+*ф22ас)+4'н.д(«г)} - ^н.в(«п-аз)
Важно заметить, что порядок разностного уравнения
ППН в режиме прерывистого тока понижается на 1, что уп-
рощает анализ динамики ППН в этом режиме. Однако ис-
пользовать на практике это преимущество трудно, поскольку
в переходных процессах режимы непрерывного и прерыви-
стого токов часто чередуются друг с другом, что, наоборот,
усложняет расчеты.
Аналогично (10), (И) и (13) при использовании относи-
тельных координат пространства состояний получаются
уравнения для определения времени спада тока тс
«12 Gc )^2Go )*2 (лтп) + «11 c)Ri Go )И (птп) +
(14)
+ [«12 Gc )^2Go) + *12 Gc )] v2 (пТп ) = 0,
значений относительного напряжения на конденсаторе в конце
спада тока
х2(итп +т0 +тс) = а22(тс)А2(т0)х2(«тп) + с21(тс)/г1(т0)к1(итп) +
+ [«22Gc)^2(t0) + ^(ТсЯузОИп) (15)
и в момент х = (л+1)тп
105
х2[(и + 1)-гп] = й2(тп -tc)fl22(Tc)x2(«tn) +
+ й2(тп -т0 -тс){а2!(тс)Л1(т0)у1(ятп) +
v2(«xn)}---v2(«xn)’
+ о22(тс)/г2(т0) + />22(тс)+^-
L J
Y _ ис
•^2 ~
где
1
______
кфи5’ Л2 кфи6’
ТС; q-~/L/C.
J\
Введя следующие обозначения
v =^L;
‘ 676’
у = “
к*иъ
Л/(тс) = л2(тп - тс)с22(тс);
М(х0>хс) = Мтп - хо ~ хс)«21 (хс)й1 (хо) =
= тД~Й2(хП ~ ХО ~ хс)[1 - ^(xo)]«21(xc);
лф9б
^г(х0.хс) = Аг(хп ~ хо “ хс)[«22(хс)Я2(хо) +
+ *22Гс) + —
Q J
х [1 - fl22(xc) (1 - ^г(хо))] + ^22 (х с) ( - ~
U J Q
(16)
(17)
~ = hl^n~4 ~хс)х
Q
Q
где учтены равенства (2.19) для Rx{t) и Л2(т), запишем урав-
нение (16) в виде:
х2[(л + 1)хп]= Л/(тс)х2(лтп) + 7У1(т0,тс)т1(лтп) +
(18)
+ -^2(x0,xc)v2(»xn)-
Это уравнение всегда нелинейно в связи с тем, что вре-
мя тс согласно (14) нелинейно зависит от x2(mn) и т0.
Полагая в (18) vt(mn) = const - v., v2(mn) = const = v2,
х2[(и + 1)тп] = х2(итп) = х2уст, находим относительное напря-
жение на конденсаторе в установившемся режиме:
_ Ni(xo,xc)Vj +(V2(xo>xc)V2 Ппч
х2.уст ----- ; 777—V—--------•
1-Л7(тс)
106
Теперь имеем два уравнения (14) и (19) для определения не-
известных х2 уст и тс ПРИ известных т0, vb v2.
3.2. Соотношения для расчетов инвертирующего ППН
методом усреднения
Режим непрерывного тока
Интегрируя уравнение (2.1) при внешнем воздействии
уф = ||ивх, 'н.дГ за время Го и уравнение (1.2) при внешнем
воздействии
за время Т - tQ, по-
лучаем
^ЛХф(7’) = уА'„ф -- [хфЛ + (1 - у)Анф —*— ГхфЛ +
1 о 7 ~ Т° г0
1 'о 1 IIО ОI
+ УВн.ф ~ рфЛ + (1 - у)Внф — — [
Ц 7 0 4> 11 11
(20)
где матрица А'1ф задается выражением (2.2), а матрицы АНф
и Вн ф — выражениями (13).
В случаях, когда приращение вектора состояния за пе-
риод Т мало, т.е. для норм векторов ЛХф(7) и Хф имеет место
неравенство
|ЛХ*(П||«|Хф|.
локальные средние значения векторов Хф и уф на интервалах
to и Т - t0 можно считать равными средним значениям этих
векторов за период Т:
1 ° 1
'О о 7 " г0
. ‘о , Т
- ^фЛ = ——- рфЛ = Уф.ср.
'о о 7 “ Го
(21)
107
Тогда уравнение (20) преобразуется к виду
уАХф(Т) — АНфСрХфср + Вн фСрУфСр,
где усредненные матрицы
Ан.ф.ср = уАНф + (1 — у) Анф,
Вн.ф.ср — уВн.ф + 0 ~ у)Вн.ф
(22)
(23)
о о
О 1
Матрица Ан фср в уравнении (22), как и у повышающего
ППН, определяется выражением (2.34), а согласно (23)
т> —
° н.ф.ср —
х
L
0
0
1
С
(24)
Приближенное уравнение (22) лежит в основе расчета
динамики ППН методом усреднения. При этом приращение
мгновенного значения вектора состояния за период ДХф(7)
принимают равным приращению среднего значения
ЛХфср(Т). Тогда равенство (22) превращается в разностное
уравнение относительно дискретного множества средних
значений Хфср(и). Чаще величину ДХф(Т)/7’ принимают за
производную dx^^jdt и получают дифференциальное урав-
нение
^хф
~~ Ац.ф.срХфср +ВНфСрУфСр. (25)
В установившемся режиме ДХф(7) = 0 и из (22) находим
хФ.ср = “АнфсрВНфСрУфСр, (26)
где с учетом (2.34) и (24)
Ан.ф.срВц-ф.ср = — Tj — R ( У) . (27)
(1-у) + r/R -у(1-у) г
108
С учетом (27) из (26) получаем
L.cp
1_____
(1-у)2+г/Л
у^ + 4.д.сР(1-г)
^ВЫХ г ^2 /п Лад.срг]-
(1-у) +r/R
(28)
(29)
Равенство (29) определяет регулировочную характери-
стику инвертирующего ППН. Подставляя в (29)
/нлср = Л -^вых/Л и решая относительно 17ВЬ1К, находим
выражение для внешней характеристики
£/вых=~-^вх-7-Ч/“’ (30)
!-У (1-у)2
где /н — среднее значение суммарного тока нагрузки (в со-
противлении R и источнике тока /и д). Сравнивая выражения
(30) и (2.41) замечаем, что среднее значение Выходного на-
пряжения при холостом ходе (7н=0) у инвертирующего ППН
^выхх =7— ^вх (31)
1-У
при возрастании у, начиная с 0, также увеличивается, начи-
U
ная от 0, а у повышающего ППН всегда Свыхх = х- > U' .
1-у
У инвертирующего ППН шире диапазон регулирования на-
пряжения UBVDi-
Выходные сопротивления повышающего и инвертирую-
щего ППН определяются одним и тем же выражением (2.88).
Исключив дополнительный ток нагрузки 71U(.cp из равен-
ств (28) и (29), получим связь среднего значения тока реак-
тора с напряжениями £7ВХ и Пвых:
Л.сР = ;[у^вх-(1-у)^вь1х]>
109
откуда с учетом (30) имеем равенство
(32)
совпадающее с (2.43).
Другие методы расчета статических характеристик
Как и в случае понижающего и повышающего ППН, для
расчета силовой части инвертирующего ППН обычно исполь-
зуют упрощенные соотношения, основанные на допущениях о
малости пульсаций выходного напряжения «с = ивых и потерь
энергии в элементах силовой схемы.
При таких допущениях в установившемся режиме ток /£
можно определить в предположении, что напряжение на
конденсаторе постоянно «с = ^4ых [6, 8]. Тогда, как видно из
схем замещения (рис.3.1,б- и в), ток i£ изменяется по экспо-
ненциальному закону, аналогичному (2.48):
iL =[1 +£®, Q < / </0,
\ г ) г
z х -'О (33)
( и У - т и
iL = 7 +Евь« е Ъ -Ев» I <t<T,
\ г ) г
где TL=L/r. Подставляя в первое выражение t=t$, 1ь~1ъ во
второе — t— Т, получаем уравнения:
12 = ГZj - а + /. = Г/, + К
I Г J Г V г ) f
где а = е '° Ть,Ъ = e^T~,0^TL. Из этих уравнений имеем
у __ ^вх (1 д)^ ^вых 1 ~ _ "Ли 1 ~ а
1 г 1-ab г 1-аЬ’ 2 г 1-аЬ
ду = ^вх + ^вых (1- дХ1 ~
г 1 - ab '
^ВЫХ д(1 .
г 1-аЬ ’
(34)
ПО
Сравнивая выражения для размаха пульсаций тока дрос-
селя AZ у трех схем, замечаем, что в понижающем ППН AZ
зависит от напряжения питания UBX, в повышающем — от
выходного напряжения <7ВЫХ, в инвертирующем — от 1/вх и
[7ВЫХ. Кроме того, во всех схемах AZ зависит от длительности
включенного состояния транзистора Iq, постоянной времени
Ti и частоты переключений f =\/Т.
В данной схеме, как и в повышающей, среднее значение
тока нагрузки /н совпадает со средним значением тока диода
7дср (рис.3.1,а), а через диод на интервале Т- t0 проходит ток
реактора i£. Поэтому, интегрируя второе равенство (33) за
время Т - t0, получаем
Т f II А 17
откуда с учетом (34) имеем соотношение
Т — !-!• + ^ВЫХ (1 g) (1 _ ^вых Z1 _ -Л /341
н Т г \-ab г t '
связывающее значения ZH, 1Ь и UBUX и позволяющее строить
внешние и регулировочные характеристики ППН. Решая
уравнение (35) относительно (7Вых> получаем выражение для
внешней характеристики
TL (l-a)(l-b)rT
г г Т 1-аЬ вх н
вЬ“ г т 7z(l-o)(l-6) ’
У Т \-ab
(36)
которое при замене экспонент а, b и ab линейными частями
разложений в степенные ряды принимает вид
Г] у(1~у)^вх _ Y гт _г г
и вых ~ 1 А \ 1 С'кх 'и Z ’
l-Y-Y(l-v) 1-Y (1-y)
что совпадает с (30).
Ш
Дальнейшее упрощение расчетных соотношений достигает-
ся, если принять г = 0 и, соответственно, линейные законы
изменения тока ijj.
0</</0,
(37)
iL t0<t<T.
Подставляя в первое равенство (37) t-fa, во второе —
t~T, iL=h, получаем уравнения:
Л=/1+^Ч; А = /2-^(Г-^о).
откуда
и т и т
д7 = /2_/1 =Е^£у = ^<(1_у); (38)
J-.1 1j
Т - Т М . Т _ I А/
*1 * L.cp 2 ’ ^2 *L.cp + 2 *
Из равенства (38) следует
£/ = — ~U
v вых J — у вх ’
что совпадает с напряжением холостого хода (31) и дает за-
вышенное значение 17вьи для нагруженного ППН.
Заменяя в (34) экспоненты а, b и ab линейными частями
их разложений в степенные ряды, получаем
Л/ = ^Ц^у(1~у), (39)
что с учетом эквивалентного (31) равенства
^вых = (^вх + С№1х)у совпадает с выражением (38)
Д/ = %Ч1-у).
Среднее значение тока нагрузки при допущении г = 0
определяют по заштрихованной на рис.3.2,с площади под
кривой //,:
L ~ 1 ц.ср = 7L.cp (1 — У) >
112
откуда следует формула (32). Таким образом, связь между
токами /н и IL cp в установившемся режиме отражается од-
ним и тем же равенством как при использовании общего ме-
тода усреднения, так и при допущении г = 0.
Равенство (30) для инвертирующего ППН, как и (2.41)
для повышающего, может быть получено без использования
уравнения (22). При этом исходят из уравнения (2.46), кото-
рое справедливо и для инвертирующего ППН (рис.3.1,с). В
предположении постоянства напряжений иъх— U£x, U(^Ubb№
напряжение на транзисторе ир представляет собой последо-
вательность прямоугольных импульсов с амплитудой
(7вх+/7Вых и длительностью Т- tG (рис.3.2,л). Согласно
рис.3.2,с UK3cp =(С4х+(7вьк)(1-у), поэтому из уравнения (2.46)
имеем
U = U - 1ь^рг
ВЫХ 1 ПХ 5 3
1-у 1-у
что с учетом равенства (32) приводит к уже известному выра-
жению (30)
Режим прерывистого тока
Ток iL в этом режиме и в данной схеме имеет импульс-
ную (треугольную) форму (рис.3.2,б) так, что его локальные
средние значения на интервалах Го и tc
1 'о । /«+/с
^L,dt
0 0 с Г0
примерно одинаковы, а на интервале бестоковой паузы среднее
значение, естественно, равно 0. Поэтому соотношения для ме-
тода усреднения здесь выводятся несколько иначе, чем в ре-
жиме непрерывного тока.
Интегрируя уравнение (2.1) за время Го, уравнение (1.2)
за время tc и уравнение (2.52) за время Т - Го - Гс, получаем
точное равенство
113
11 0 II
7’|Д«С(П|
» 1 1 f(1+fc
~ yAh ф — ^ХфЛ + ус АНф — уХфЛ —
° о с 'о
1-Y-Yc
RC
T-t0-t
1,0 1 '°+Ч о II
+ уВн.ф - К* + усвн ф - J . Л,
to о 'с ,а |М
(40)
где матрицы А’н ф и ВНф определяются выражениями (2.2), а
матрица Ан ф - выражением (1.3); уф = ||ию, /нд|т.
Здесь, как и в равенстве (2.53), можно положить
1 Z°r 1 /o+t 1 т
— j ХфЛ ® — |хфdt » Хф ср л ; у, jucdt « UCcp,
где ХфСрЛ — локально среднее значение вектора х^,;
^Сср=^вых ~ среднее значение напряжения ис за период Т.
С учетом сказанного из равенства (40) получим прибли-
женное соотношение
II
о
Д«с(Л
+ Ус^Н.ф/Хф ср л
о
f/ccp
/ +yBh.<1>V<J).cp +УсВн.ф т
н-Д-срЦ Рн.д.ср
которое, учитывая очевидные равенства
kcj*|o
klpH° i|Vto’
представляем в виде
tIamt)!
— А Л v
н.ф.срлф.ср.л
® н.ф.ср ^ф.ср >
(41)
114
где
Ац.ф.ср УАН ф + Ус^Н.ф
I0 0|
|о 1|
Уй + Чсг2 _Ус
L L
Ус _______L
С RC
(42)
‘ Дер
У + Ус
Как видно, выражения (2.55) и (42) совпадают, а выра-
жения (2 56) и (43) отличаются элементами первой строки.
Поскольку локально среднее IL ср л и среднее за период Т
значения связаны равенством
г J_Lcp_
1 L.cp-Л
У + Ус
и, соответственно,
^L.cpji — О
Хф.ср.л — “ У + Ус Хф.ср’
I иС.ср 0 1
соотношение (41) преобразуется к виду
7-||Аис(7’)[ АМ>хрхФ-ср
+ ®н.ф.ср',ф.ср ’
(44)
где
А - Ал
^Н.ф.ср ’Н.ф.ср
1
У + Ус
о
_£ _1с
L L
Ус______L
(у + Ус)С RC
(45)
о
1
г = 1Г1+Ye7*2- — усредненное за период Т активное сопротив-
У+ Ус
ление цепи реактора L и включенного транзистора или дио-
да.
115
В установившемся режиме Д«с(7)=0 и согласно равенст-
ву (44) получим
хФ-ср = _АнфсрВНфСр¥фСр, (46)
аналогичное полученным ранее для других схем и режимов.
С учетом (45) и (43) имеем
-1 ij _
н.ф.ср "н.ф.ср —
Ус
Y + Yc R
_ _Y
/?
YYc
Y + Yc
— Yc
поэтому равенство (46) эквивалентно двум:
Z.cp 2 П Y + Лсд.срТс ] >
Yc ! п Л /
Y + Yc R
=___________f и -j г
»ых 2 ,, ,„ вх 'н.д.ср'
Ус +rkY + Yc ;
Y + Yc R
(47)
(48)
(49)
На границе режима прерывистого тока у + ус=1, и равен-
ства (48), (49) совпадают с (28), (29).
Выражение (49) определяет регулировочную
характеристику в режиме прерывистого тока. Подставляя в
равенство (49) 7ндср = 7Н ~Ubmx/r и решая относительно
t'Bbix, находим выражение для внешней характеристики
^вых=^^вх-^Ц^/н, ' (50)
7с Ус
которое должно быть дополнено уравнением для определе-
ния времени tc = ус7"
Выражая дополнительный ток нагрузки /н д ср из уравнения
(49) и подставляя в (48), преобразуем равенство (48) к виду
-ср _ (^вхУ ^выхYс)»
(51)
116
из которого с учетом (50) получаем
IL.cp
(52)
Ряд расчетных соотношений получается без привлечения
равенства (44).
При определении tc можно считать, что ток изменяет-
ся по закону, аналогичному (33):
iL о< г < г0,
г
( и \ и
; _ г j. вых „ ‘i вых / , / t t
lL - + Г----------------’ ‘0<r<z0+rc’
I r ) r
(53)
где амплитуда импульса тока
I = (1 _ е-'о/^) = ^вх _ Д) (54)
г г
получается из первого равенства (53) при t = /0. Подставляя во
второе равенство (53) t = tG+tc, i£=0, с учетом (54) находим
tc=TLln 1 +
Пвх
77
вьгх
(1-о)
(55)
Интегрируя второе равенство (53) за время tc, находим
среднее значение тока нагрузки, равное среднему значению
тока диода:
- ^вх Zkf 1 _ п + ^№1Х6 - ^RhIX
" Г Щ <7BJV ' ^вх
которое при подстановке (55) принимает вид
U Т,
' = вх
И гг
гТ
аналогичный (2.76).
(56)
U U
E^xin 1 + ^вх_(1-о)
вх L вых
(57)
где а = е to^L .
117
Разложив в (57) логарифм в степенной ряд
х2
1п(1 + х) = х- — + и сохранив линейный и квадратичный
члены, получим
= [^7z,
н ~ 2 UBMXrT
(58)
При разложении в (58) экспоненты в степенной ряд и
сохранении линейного и квадратичного членов получим
и2 у2
! lbxY
н 8
2
; -у
(59)
з
а при сохранении только линейного члена —
„1 U^T
2 UB..xrTL
(60)
Формула (60) может быть получена и непосредственно
из (37), где нужно положить 1г=0, 1т=1т. Тогда
т
т
_ 6Гвх ,
L °’
гт
=Q,
(61)
откуда
(62)
t - t
с ~ и 0 '
вых
Как и в повышающей схеме, среднее значение тока на-
грузки определяется усреднением за период Т заштрихован-
ной на рис. 3.2,6 площади под кривой тока iL:
I = —/ -с
н 2 Т 5
откуда с учетом (61) и (62) имеем формулу
118
^вых^
с учетом выражения TL = L/r совпадающую с (60).
Соотношения для границы между режимами непрерывного
и прерывистого токов
Точные соотношения получаются из рассмотрения кри-
вой тока /£ на интервале спада tc, описываемой выражением
(1), откуда при отсчете времени от начала спада
zz = Фц(0гт(0)+ Ф1г(0ыс(0) + ^фп(0гнл (63)
Подставляя в (63) t = Т -10 , Q, = 0, получаем уравнение
относительно граничного значения to
Фц(Г “ ^оХг(О) + Ф1г(^- Zo)zzc(6) +^ф12(^ _ ^o)zn.fl = 0,(64)
которое используется при расчете переходных процессов.
При расчетах статических характеристик возможно исполь-
зование упрощенных соотношений, не требующих решения
трансцендентного уравнения (64) и содержащих не мгновенные
z'i(0) и «с(0), а средние значения тока и напряжения. Под-
ставляя во второе уравнение (33) t = T, ii=0, Ii = lm из
(34) и решая относительно J7BbK, получаем формулу
U - U — Д--~ (65)
С ВЫХ.Гр G ВХ 1
где а = е~,(>1Ть; b = .
Подставляя в (56) tc = T-t0 и UBba = UBba w из (65), на-
ходим
~ d ~ А “ A (1 “ Т)] ’ (бб)
р г L 7 1 - о
что совпадает с (2.82).
119
Формулы (65) и (66) залают в параметрическом виде
граничную зависимость С7выхгр от /нгр.
Применяя квадратичную аппроксимацию экспонент а и
Ь, выражения (65) и (66) преобразуем к виду:
TL
2 — 1
и - и у т
° ВЫХ.ГР u вх 1 т
Лигр
= ^У(1-У)
г
1-
(1 -Y) 2^-d-Y)
/т \2
(68)
3.3. Построение статических характеристик
инвертирующего ППН
Внешние характеристики ППН
Задаваясь значениями у = /0 /Т и рассчитывая граничные
значения напряжения и тока по формулам (65) и (66), стро-
им граничные кривые для TL /Т =5 и 10 (штриховые линии
на рис.3.3).
Сравнивая формулы замечаем, что (65) получается вычи-
танием UKX из правой части (2.81), а выражения для гранич-
ных токов (2.82) и (66) совпадают. Поэтому граничные кри-
вые инвертирующего ППН получаются смещением вниз на
иъх граничных кривых повышающего ППН (рис.2.4).
Внешние характеристики в режиме непрерывного тока
рассчитываются по формуле (36), которая получается вычи-
танием Ивх из правой части (2.51). В режиме прерывистого
тока расчет внешних характеристик проводится по (57),
120
задаваясь UBbDi/UBX и определяя IHr[Um . Замечаем, что вы-
ражение (57) может быть получено из (2.76), если в послед-
нем заменить [7ВЫХ - UBX на UBX. Следовательно, внешние ха-
рактеристики инвертирующего ППН в режимах непрерыв-
ного и прерывистого токов получаются из таких же характе-
ристик повышающего ППН смещением их вниз на UBX
(см. рис.2.4 и 3.3).
В данной схеме, как и в повышающем ППН, при увели-
чении относительной постоянной времени TL/T с 5 до 10
граничная кривая (штриховая линия на рис.3.3) заметно
смещается влево, а внешние характеристики в области не-
прерывного тока практически не изменяются. Расчеты по
формуле (30) дают результаты, практически не отличающие-
ся от полученных по формуле (36).
Вычисления для области прерывистого тока по формуле
(59) также приводят к кривым, близким к показанным на
рис. 3.3.
121
Регулировочные характеристики ППН
Регулировочные характеристики будем рассчитывать при
постоянных значениях нагрузки А, хотя иногда их рассчиты-
вают при фиксированных средних значениях тока нагрузки
(/н = const).
Подставляя в равенство (35) 1Н = UBbXX /Л и решая отно-
сительно ПБЫХ, получаем формулу для расчета регулировоч-
ной характеристики в режиме непрерывного тока
(1-д)(1-г>) tl
^въа _ _______1 ~ вЬ____Т______ (МУ
Г . (1-а)(1-/>) TL ’ ' ’
R 1 l-ab Т
которая при замене экспонент а, b и ab линейными частями
разложений в степенные ряды принимает широко известный
вид [6]
^вых _ Y (1 ~ у) (70)
UEX r/R +(1-у)2'
В режиме прерывистого тока при /н = UBba/R уравнение
(57) не решается явно относительно (/вых,а из (58) получим
= (1 - a) = (1- а) --- (71)
UBX ^2гТ ^2(1-Хф)Г’ 1 '
откуда видно, что из-за 1 - а «t0 /TL выходное напряжение
примерно пропорционально у:
и.™ „у I кт ~у I.
UBX 'у 2,L ^2(1-Кф)Т/
(72)
Граничная кривая строится по формуле (65), которая
при TL/T -э со принимает вид
U V
° вых, гр _ У
С7ВХ 1-у
(73)
I
122
Граничные кривые показаны на рис.3.4 штриховыми ли-
ниями. Они при изменении относительной постоянной вре-
мени TL/T от 5 до оо смещаются вверх примерно на . 10 %.
Область режима непрерывного тока располагается правее
граничной кривой.
Рис. 3.4
В то время как граничные кривые зависят только от па-
раметра TLIT, регулировочные характеристики зависят еще
от отношения сопротивлений
Г 1-
я" ’
т.е. от активных потерь в силовой части. На практике необ-
ходимо учитывать, что при изменении сопротивления г ме-
няется как TL = L/г, так и при TL/T -> оо Кф -> 1. В
предельном случае, когда TL/T -» оо, -> 1, имеем
и согласно (69) регулировочная характеристика в области
непрерывного тока принимает вид
^вых Y
<7ВХ 1-Y’
123
т.е. она сливается с граничной кривой и точка ее пересечения с
граничной кривой остается неопределенной. В то же время, в
этом предельном случае регулировочная характеристика для
режима прерывистого тока определяется равенством (72), ко-
торое становится точным. При этом появление режима пре-
рывистого тока возможно только тогда, когда наклон прямой
(72) больше, чем равный 1 наклон касательной к граничной
кривой (73) в точке у=0. Это возможно при условии
L
RT
(74)
Итак, при выполнении условия (74) в интервале 0 < у < у1р
регулировочная характеристика при TLjT м линейна, а при
Угр < У < 1 совпадает с граничной кривой (73).
Используя формулу (69) в режиме непрерывного тока и
формулу (70) в режиме прерывистого тока, строим регулиро-
вочные характеристики для TJT = 5 и двух значений Лф
(рис. 3.4).
Подставляя в равенство (30) 7Н = С7ВЫХ /R и решая его
относительно {7ВЫХ, приходим к формуле (70) для расчета
регулировочных характеристик в режиме непрерывного тока,
которая дает результаты, практически совпадающие с полу-
ченными по формуле (69).
Дифференцируя (70) по у, найдем значение у = ум, при
котором получается максимум регулировочной характери-
стики,
где = R/(R + г), и значение максимума
Т^вых max _ 1 Л1
(76)
124
Обычно работа ППН вблизи максимума регулировочной
характеристики и на спадающем участке нецелесообразна
из-за высокой чувствительности выходного напряжения к
изменениям отношения r/R. Поэтому относительная дли-
тельность включенного состояния транзистора должна удов-
летворять условию утах < ум.
На рис. 3.5 представлены построенные формулами (75) и
(76) зависимости.
Еще одним фактором, препятствующим работе инверти-
рующего ППН при значениях у, близких к ум, является сни-
жение КПД
' _ ^н^вых
I и ’
л вх вх
где среднее значение входного тока, протекающего при
включенном транзисторе, с учетом (32)
^вх ~ 1,.срУ ~ 7
1-у
Принимая во внимание равенство (70), будем иметь
формулу
125
n' = 1-У = С1 - г)2
Y и™ ^ + (1-у)2
1\
(77)
по которой на рис.3.6 построены зависимости т/ от у. Из
рис.3.6 видно, что инвертирующий ППН, как и повышаю-
щий, из-за заметного снижения КПД нецелесообразно при-
менять при у > 0,5 — 0,6.
3.4. Дополнительные соотношения для расчета силовой части
инвертирующего преобразователя
Для обеспечения режима непрерывного тока реактора
его минимальное среднее значение /дсрщщ должно превы-
шать половину размаха пульсаций Д//2. С учетом равенств
(32) и (38) получаем условие
откуда имеем
I U
г __ н mm . вых zi „ \гр
1 Лер. min - ----> ту!1 “ ,
1-у 2L
£>С7Вы*(1-У)2
2/7Hmin
(78)
где f = 1/Т. В неравенство (78) подставляется значение
Y = Ymin = гг- UtibS4j— ’ НРИ котором разность 1 - у максимальна.
вх.пгах "Г Л вых
126
Действующее значение тока реактора рассчитывается по
формуле, аналогичной (1.95):
Il ~
(д/)2
12
Определяя IL ср по формуле (32), а Л/ по (38), имеем
Г Л, V , 1 pWl-Y)'
Ц-yJ 12[ fL
Il =
На основании показанной на рис.3.2 кривой напряжения
на реакторе Ир, подставляя в равенство (1.94) Д = I2 = UBX,
1з~1л~~ 1Гвых.’ ^2=Z4=0, ^1 = ^0 =Y^> - t0 - (1 - у)Т,
получаем действующее значенью напряжения на реакторе
If и V
Y + l-Y = ^BbKJL^-
V к вых ) \ Y
Для оценки пульсаций напряжения на конденсаторе
фильтра ПГШ учтем, что, как и в повышающем ППН, кон-
денсатор заряжается
током /£ - ZH при за- ъ
крытом транзисторе и
разряжается током о
нагрузки ZH при от-
крытом транзисторе
(рис.3.7). Поэтому размах пульсаций напряжения на конден-
саторе
\ис
, ЦуТ _ 4y
С /с’
а коэффициент пульсаций этого напряжения
А“с _ 4y
2tT IfCU^. ‘
127
Требуемая емкость фильтра определяется формулой
С _ ЛттахУтах Z7CO
^Лплоп./ и вых
совпадающей с (2.90).
При скачкообразном уменьшении тока нагрузки инвер-
тирующего ППН, как и в понижающей и повышающей схе-
мах, начинается увеличение выходного напряжения «с, блок
управления прекращает периодическое включение транзи-
стора и образуется схема, показанная на рис. 3.1,в. Переход-
ной процесс в схеме описывается выражением (1.15). При-
нимая в (1.15) пТ + 1о = 0, имеем
ис(0 - Ф21(0гт(0) + Ф22(0ис(0) +^ф22(0;н.д>
где под /н д и R понимаются значения после скачка тока на-
грузки.
С учетом выражений для элементов матриц (1.11) и
(1.13) это равенство запишем как
ис - А + е а1
А2 sin<D0/ + Л3 cosco0Z + -— siiio0/| ,
I ®о )
где
А
-~К ri - А - г’Н°)-«с(0)//?-/ил _ /z(0)-ZH.min .
- Кфг1ил,А2----------------------------~,
о0С
Л3 =ис(0) + /Гфг/нл;
/H.min — значение тока нагрузки после его скачкообразного
уменьшения. Тогда справедливы равенства (2.91) и (2.92),
которые при малых активных потерях в £ С-контуре преобра-
зуются к виду:
tgcooZM « А2/А3; Uс тах « 4 + Л3 /17 tg2o0ZM ,
где А « 0; А2 « [/£(0) - /н inin]; А3 « ис(0).
128
При малых пульсациях выходного напряжения ППН
можно принять «с(0) “^вых и вычислять по (30). Тогда зна-
чение выброса выходного напряжения
Л^выбр = ^С.тах ~ «с(0) = «с(°) (/1 + ~ 1)=
h-----з---- \
= ^Rb,xW1 + tg °Vm -1/,
(80)
t 2 f £[<t(0)-Лт.гшп]2
где tg <В(/М =------—j---------
вых
3.5. Расчет силовой части однотактного ППН
с обратным включением выпрямительного диода
У однотактного ППН с обратным включением выпрями-
тельного диода (рис.3.8,а) включенному состоянию силового
транзистора VT1 соответствует закрытое состояние диода VD1
В этом состоянии в первичной обмотке и?! трансформатора
нарастает ток намагничивания, конденсатор фильтра С раз-
ряжается на сопротивление натрузки. При выключении
транзистора ток намагничивания переключается во вторич-
ную обмотку трансформатора, открывается диод VD1, энергия
накопленная в индуктивности намагничивания, передается
конденсатору С и нагрузке R. Если пренебречь паразитными
параметрами трансформатора, то для рассматриваемой схемы
129
получается схема замещения, представленная на рис.3.8.6,
где «вх = П12«вх — входное напряжение, приведенное к вто-
ричной обмотке трансформатора; м12 = w2/wl; 1^ — индук-
тивность намагничивания трансформатора, приведенная к
вторичной обмотке.
Из сказанного видно, что уравнения состояния одно-
тактного ППН с обратным включением выпрямительного
диода совпадают с полученными в § 3.1 - 3.4 уравнениями
инвертирующего ППН, если ит заменить на wBX, a L — на
£2-
Для ограничения перенапряжений, появляющихся на
коллекторе транзистора из-за наличия индуктивности рассея-
ния трансформатора, вводится рекуперационная обмотка и
дополнительный диод так же, как на рис.1.16,а, либо допол-
нительный рекуперационный трансформатор, первичная об-
мотка которого подключается через диод параллельно пер-
вичной обмотке силового трансформатора TVI [9].
Найдем соотношения для определения индуктивности L\
первичной обмотки Wj трансформатора. Размах пульсаций
тока намагничивания в режиме непрерывного тока опреде-
ляется по приближенной формуле (38):
Введя коэффициент пульсаций тока намагничивания
' _ _ ^L.cp.mm
ПТ'27^’“^Г’
с учетом формулы для А/ будем иметь
£/вху
1ср" 2^,77'
130
Среднее значение входного тока преобразователя
Т 1 ^ВхУ
I — 1т V — -----------
вх У£срУ 2КМ
С другой стороны
f _ * вых
их -тт
П Ьвх
где г)’ — КПД преобразователя без учета потерь мощности в
магнитопроводе трансформатора (см. рис.3.6).
Приравнивая правые части выражений для тока /вх, по-
лучаем
i^yV
(81)
Коэффициент пульсаций тока намагничивания с учетом
пропорциональности токов Zicp и 1Н согласно (32) определя-
ется по формуле
17 _ ^H.min
14 П.Т г
Исходя из необходимости получения высокого КПД д',
задаемся утах“0,5, находим выходное напряжение, приве-
денное к первичной обмотке
ТГ' = ТГ .
вых вх.пип 1
1 Ушах
и вычисляем коэффициент трансформации
„ =Г2_ = £вь«.
”1 ^вых
Поскольку произведение
и и'
ТГ v _ °вх° вых
вх к и . tj'
вх вых
131
увеличивается с ростом UBX, то при расчете индуктивности Ly
в формулу (81) подставляем С^хтах и
у . = ____^вых____
Ymm £г'
° вх.тах ° вых
После расчета среднего значения тока реактора
можем найти амплитуду коллекторного тока
Дшах — IL.ср + Л//2 — 2^Ср(1 + А"пт) .
Амплитуда напряжения на транзисторе
^кэ.тах = ^вх + ^вых ~ вх + вых /«12 '
Среднее значение прямого тока диода /д.ср=/н, а ампли-
туда обратного напряжения
^'д.об ~ «12^вх + ^вых-
Действующие значения токов в обмотках трансформато-
ра рассчитываются по формуле (1.94), откуда
«12 \ I 3
Произведение площади окна на сечение стержня магни-
топровода 5ОК5С определяется по формуле (1.110). В ходе
расчета трансформатора определяется реальная индуктив-
ность £ь которая должна быть не меньше найденной по
формуле (81).
132
4. ПРИНЦИПЫ ПОСТРОЕНИЯ, МАТЕМАТИЧЕСКОЕ
ОПИСАНИЕ СИСТЕМ УПРАВЛЕНИЯ И СТАТИЧЕСКАЯ
ТОЧНОСТЬ ИМПУЛЬСНЫХ ППН
Основной функцией устройств управления (УУ) им-
пульсными ППН являются поддержание выходного напря-
жения на заданном уровне с определенной точностью и
обеспечение безотказного функционирования в переходных
и аварийных режимах. Важнейшими узлами УУ являются
широтно-импульсный модулятор (ШИМ) или частотно-
импульсный модулятор (ЧИМ), осуществляющие соответст-
венно широтно- или частотно-импульсную модуляцию [11]-
В импульсных ППН чаще всего применяются: широтно-
импульсная модуляция второго рода (ШИМ-2), асинхронная
интегральная ШИМ, частотно-импульсная модуляция вто-
рого ряда (ЧИМ-2) и интегральная ЧИМ.
Структуры систем управления рассмотрим на примере
понижающего ППН с выходным ZC-фильтром.
4.1. Преобразователь с ШИМ-2 и обратной связью
по выходному напряжению
Широко применяются ППН с ШИМ-2 и обратной связью
по выходному напряжению (с пропорциональным егулирова-
нием) (рис.4.1). Схема управления ППН состоит из компарато-
ра DA1, генератора пилообразного напряжения ГПН, AS-
триггера, образующих ШИМ-2, усилителя рассогласования
ПА2, источника опорного (задающего) напряжения Goril. На-
личие триггера исключает формирование на интервале 0<t<T
нескольких импульсов на выходе ШИМ, даже если кривая на-
пряжения uy(f) несколько раз пересекает сверху вниз график
пилообразного напряжения «Г1(0, например, за счет помех.
В этом случае управляющее напряжение на входе ком-
паратора DA1 определяется выражением
uy = Ky(Uon-KRuc), (1)
133
где Ку = Rl/(R2 +KaR3) — коэффициент усиления усилителя
рассогласования DA2 для инвертирующего входа;
Uoa=Uoal(Ky +1)/Ку — опорное напряжение, пересчитанное
к инвертирующему входу усилителя DA2; KR -R4/(R3 + R4) —
коэффициент передачи делителя напряжения, включаемого
между выходом ППН и входом усилителя рассогласования в
случае uc>Uon.
Рис.4.1
В компараторе DA1 происходит сравнение управляю-
щего напряжения иу с пилообразным напряжением ип. Будем
полагать, что в пределах периода Т пилообразное напряже-
ние изменяется по линейному закону
ип = + un0 ’ (2)
где Un — амплитуда пилообразного напряжения; ипо — значе-
ние напряжения в начале его линейного изменения. Далее
в большинстве случаев будем считать, что ип0 = 0.
Работа ППН синхронизируется тактовыми импульсами
Ur, подаваемыми на вход S триггера (рис.4.2). В момент фор-
мирования тактового импульса 7?.5’-триггер устанавливается в
состояние 1, на его выходе появляется высокий уровень
134
напряжения, который - при необходимости усиливается в
формирователе импульсов управления ФИ и обеспечивает
включение транзистора VT1. В момент кривая напряжения
uy(f) пересечет график пилообразного напряжения un(f), на-
пряжение на инвертирующем входе компаратора DA1 ста-
новится меньше, чем пилообразное напряжение мп, подавае-
мое на неинвертирующий вход. Поэтому в момент z0 на вы-
ходе компаратора появляется отрицательный перепад напря-
жения, вызывающий переключение триггера в состояние 0 и
окончание положительного импульса на выходе ШИМ.
Момент Zq окончания импульса на выходе ШИМ определя-
ется уравнением
Zq + UnQ = Ку ([/ оп — KrIIq),
которое перепишем в виде
(3)
135
Отсюда видно, что изменение начального значения пилооб-
разного напряжения ипо эквивалентно изменению опорного
напряжения Uon на значение ип$/Ку и, следовательно, может
вызвать нестабильность выходного напряжения ППН.
В некоторых практических схемах ШИМ-2 сразу после
выполнения равенства (3) происходит обратный ход пилооб-
разного напряжения, как показано на рис.4.3. Для использо-
вания получаемых далее соотношений в этом случае опреде-
ляется расчетное значение амплитуды пилообразного напря-
жения Un =Гйп(/0), где iin(/0) — производная на рабочем
участке пилообразного напряжения.
Рис.4.3
Принцип стабилизации выходного напряжения ППН
иллюстрируется на рис.4.2. Если входное напряжение снизи-
лось на AJ7BX, то выходное напряжение ППН также снижает-
ся, кривая управляющего напряжения йу(/) на рис.4.2 со-
гласно равенству (1) смещается вверх на Аиу(г). При этом
момент t0 пересечения кривых wn(Z) и иу(Г) смещается вправо
на значение A/о, длительность импульсов на входе фильтра
квх.ф увеличивается на Л/о так, что площадь импульсов ивхф
остается примерно такой же, как и до изменения напряже-
ния ивк.
Как видно, ШИМ-2 осуществляет дискретизацию ана-
логового сигнала uy(t), фиксируя значения иу(пТ +/q) в мо-
менты пересечений кривых uy(t) и ип(/) на интервалах време-
ни пТ < t < (п+1)Т, где п — целое число. По этой причине
ППН с УУ на базе ШИМ-2 представляет собой дискретную
систему. Система периодически замыкается в моменты
пТ +/Ь, оставаясь разомкнутой в остальное время.
136
Хотя в импульсных ППН имеется релейный элемент
(компаратор DA1 на рис.4.1), их не удается свести к широко
исследованным релейным системам, в которых релейный
элемент переключается при определенных значениях сигнала
на его входе [13]. Они не сводятся также к релейным систе-
мам с периодическим внешним воздействием ип(1) на входе
релейного элемента, которые значительно меньше исследо-
ваны в литературе. Причиной этого является то, что фронт
импульса ивх.ф(0 на входе непрерывной части системы фор-
мируется под действием тактового импульса независимо
от сигнала на входе релейного элемента, и лишь спад им-
пульса мвх ф(0 формируется так же, как в релейных системах.
Линеаризация уравнений системы управления с ШИМ-2
Системы управления с ШИМ-2 являются существенно не-
линейными при больших отклонениях входного напряжения
икх и тока нагрузки. При малых отклонениях возмущающих
воздействий она может быть сведена к линейной импульсной
системе. Как показывает опыт, этот переход к линейной им-
пульсной системе не воспринимается должным образом мно-
гими специалистами и студентами, изучающими силовую элек-
тронику. Одной из причин этого обстоятельства является
сложность для восприятия и специфичность математического
аппарата самой теории линейных импульсных систем.
Согласно равенствам (1) и (3) имеется простое выраже-
ние для модуляционной характеристики ШИМ-2:
т
=7П-к^°)"кп°]- (4)
V п
Если бы управляющее напряжение му(/) было постоянным во
времени, то иу(1) =иу(г0) = const и выражение (4) давало бы
линейную зависимость tQ от иу в интервале 0 < /0 < fomax
(рис.4.4). Теоретически возможно /0 max = Т, в реальных схе-
мам /0тах<7-
137
В действительности в схеме имеются пульсации выход-
ного напряжения «с, которые хотя и малы по сравнению со
средним значением, но подаются на
вход компаратора в составе напряже-
ния иу усиленными в Ку раз и обычно
оказывают существенное влияние на
работу ШИМ-2. Тогда зависимость
Wy(/o) нелинейна и равенство (4) пре-
вращается в нелинейное уравнение относительно to, а харак-
теристика на рис.4.4 верна лишь в том случае, когда по оси
абсцисс откладывается не определенное заранее дискретное
значение управляющего напряжения Uy{tQ).
Для линеаризации систем управления с ШИМ-2 приме-
няется широко известный в теории автоматического управ-
ления метод, основанный на составлении уравнений в ва-
риациях путем вычитания из уравнений возмущенного дви-
жения системы (штриховые линии на рис.4.2) уравнений
стационарного движения (сплошные линии на рис.4.2) [13].
Возмущенным движением системы называется режим, кото-
рый возникает в результате воздействия возмущений, на-
пример, после изменения входного напряжения на А«БХ.
На рис.4.5 в увеличен-
ном масштабе показана
часть рис.4.2 вблизи точки
пересечения кривых пило-
образного ып(/) и управ-
ляющего uy(t) напряжений,
где Auy{f) — отклонение
возмущенного движения от
стационарного. При малых
отклонениях изменение uy{f) на интервале А/о можно считать
линейным, и значение отклонения управляющего напряжения
Аму (Zo + At0) = Диу {t0 ) = [мп {to) - йу {t0)] ЛГ0 ,
138
где un(t) и uy(г) — производные соответствующих напряже-
ний. Таким образом, получим равенство
Auv(rn)
А/о = . , , (5)
wn(^o) ~ Йу(^))
связывающее малые приращения длительности импульса на вы-
ходе компаратора Afy и управляющего напряжения uy(ta). Это ра-
венство является основным в математической модели линеаризо-
ванной системы с ШИМ-2. При идеальной линейности рабо-
чего участка пилообразного напряжения имеем un(/0) = U,JT.
Равенство (5) можно записать в виде
А/о ^мТАиу^о), (6)
где 5М = 1/йп (Го) — крутизна модуляционной характеристики
ШИМ при иу(0 = const;
F = [1 - S^o)?1 (7)
— фактор пульсаций, учитывающий изменение коэффициен-
та усиления ШИМ за счет переменной составляющей сигна-
ла uy(t) в стационарном режиме.
При постоянном опорном напряжении <7ОП в соответствии
с выражением (1)
“у(*о) ~
Полагая пульсации напряжения «с, а следовательно и
тока нагрузки uc/R малыми, из второго уравнения системы
(1.1) получаем
«с('о) -
где в предположении линейного изменения тока iL на интер-
вале t0 имеем
zi(^o) - Л, +~Y'
139
а с учетом равенства (1.92)
^o) = /H+^(l-Y)Y-
ZjL
Таким образом,
U Т
«с(/0) = -КуКд^-(1-у)у;
1 и т
±=1 + *уад, 7f-(l-Y)Y. (8)
Jl jlLjV-s
При 5М = Т/Un равенство (8) перепишем в виде
1 . 1 „
F = 1 + i^0Vl
г 2
(1~y)y>
(9)
где Ко - KyKaU6/Un — коэффициент усиления контура ре-
гулирования напряжения; vl=UBK/U6 — относительное
входное напряжение. Как видно из (9), фактор пульсаций F
нелинейно зависит от трех безразмерных параметров Хо, vj,
JLC/Т и относительной длительности включенного состоя-
ния транзистора у (рис.4.6, где vj = 1; у = 0,5). Фактор пульсаций
Рис.4.6
существенно снижает коэффициент усиления разомкнутого
контура ППН с обратной связью по напряжению, влияет на
динамику и статическую точность ППН.
140
Отметим, что введенная в равенстве (9) система относи-
тельных параметров не всегда пригодна для практических
расчетов, поскольку коэффициент усиления Ко обратно про-
порционален амплитуде пилообразного напряжения J7n. Это
правильно отражает рост коэффициента усиления разомкну-
того контура SuFKoUBX с уменьшением Un. Однако иногда
используются схемы ППН без генератора пилообразного на-
пряжения ГПН, т.е. Ua = 0. Тогда выделение отдельно кру-
тизны и фактора пульсаций F невозможно, поскольку в
равенстве (5) un(/o)=O, 5М =T/Un стремится к бесконечно-
сти, но общий коэффициент усиления ШИМ
' <10)
остается конечным. В нашем случае с учетом (1) найдем
приближенное соотношение
Т 1
ям = -------------, (П)
U6 1 ( Т V
Vn+^нИ d-Y)Y
\ v JLv V- у
где vn = Un /U6 — относительная амплитуда пилообразного
напряжения; Ки = КуКа ; = UBX/U6 . Имеет место простая
связь между коэффициентами усиления: Ко = К„ /гп. На
рис.4.7 представлены построенные по формуле (11) зависи-
мости коэффициента Ям от -JbC/T при Vj = 1; у —0,5 и
vn = 0,l (сплошные линии), гп = 0 (штриховые линии). Как
видно, при vn = 0 имеет место сильная зависимость коэффи-
циента усиления ШИМ Ям от параметров силовой части L и
С, а также от у и коэффициента A"H. При этом коэффициент
Ны обратно пропорционален Кн и, следовательно, произве-
дение НмКц не зависит от Кн, но сильно зависит от 4LC/T
141
и у, и становится невозможным регулирование изменением
Кп коэффициента усиления разомкнутого контура.
Введение в схему пилообразного воздействия ип(/), син-
хронизированного тактовыми импульсами, позволяет суще-
ственно уменьшить зависимость коэффициента Ни от пара-
метров силовой части £ и С, а также от Кн и у.
Линейная импульсная модель ШИМ-2
В соответствии с равенствами (6) и (10) линеаризован
ный широтно-импульсный модулятор 2-го рода (ШИМ-2)
фиксирует дискретные значения А«у(л7’+/Ь) сигнала Апу(Г),
т.е. осуществляет его дискретизацию, формируя при этом в
моменты пТ прямоугольные импульсы конечной высоты и
малой длительности AZ0. Информация о дискретном значе-
нии Auy(n7'+/0) сигнала Ану(/) передается виде длительности
AZb импульса.
На линеаризованную непрерывную часть системы кроме
изменения длительности импульса АГ0 действуют также воз-
мущающие воздействия. При изменении входного напряже-
ния ППН на Дпвх меняется амплитуда импульсов на входе
£С-фильтра ьвхф (рис.4.2). Разность напряжений иВХф в
142
возмущенной и невозмущенной системах Дивх.ф(0 представ-
ляет собой напряжение, действующее на входе LC-фильтра в
линеаризованной системе. Каждый импульс Д«вх.ф(0 пред-
ставляется в виде суммы двух импульсов: 1) импульса конеч-
ной высоты иъх и малой длительности Д?о, определяемой
формулами (6), (10); 2) импульса малой высоты Дивх(/) и ко-
нечной длительности Zq. Первый из этих импульсов заменя-
ется дельта-импульсом площадью
^ВХА^0 ~ ^М^ВХАИу (^о)э
(12)
формируемым идеальным импульсным элементом (ИИЭ) ИЭ1
(рис.4.8) в момент nT+t0 и усиленным согласно (12) в HMUBX
раз. Второй импульс на рис.4.8 формируется импульсным эле-
ментом (ключом) ИЭ2, замыкающимся на конечное время z0.
ИЭ1
Рис.4.8
Статическая точность ППН
Основная функция устройства управления импульсным
ППН заключается в стабилизации выходного напряжения при
£70п = const. Для оценки точности стабилизации выходного на-
пряжения <7Вых на практике пользуются различными величина-
ми, в частности, суммарной нестабильностью выходного на-
пряжения в процентах от номинального при воздействии всех
дестабилизирующих факторов. Для оценки нестабильности, вы-
званной изменением среднего значения напряжения на ДС7ВХ,
Широко применяется коэффициент стабилизации
А<Увх
5
/н = const
(13)
143
а для определения нестабильности, вызванной изменением
тока нагрузки на Д/н, — выходное сопротивление
(14)
выл д г л z
А7н ит = const
Имеющиеся в литературе методики расчета и /?БЫХ
недостаточно обоснованы из-за пренебрежения влиянием
фактора пульсаций F на статическую точность; они получе-
ны лишь для некоторых частных случаев и плохо совмести-
мы с развиваемой в данной книге методикой исследования
динамики ППН.
По формуле (1.9) для расчета среднего значения выход-
ного напряжения ППН в установившемся режиме определим
малое приращение
Л^вых = ^вхАУ + УА^вх - гД/н, (15)
где Ду = Дгь/Г определяется из равенства (6) или (10):
Ду = -£м.ДМу(Г0),
а в соответствии с (1)
А«у(/0) = ^y[At/on ~ АГяА«с('о)1-
Из последних двух равенств имеем
Ду = ^Ку[д(7оп - КдЬис(t0)]. (16)
Как видно из (15) и (16), при точном расчете необходи-
мо иметь соотношение, связывающее приращения среднего
значения напряжения Д(7ВЬК и мгновенного значения A«c(t0).
Приближенные расчеты Кст и 7?ВЬ1Х основываются на допу-
щении метода усреднения:
А14ьв = A«c(fo)> (17)
что соответствует смещению кривой напряжения uc(f) вверх
или вниз с сохранением ее формы.
144
Подставляя выражение (16) в уравнение (15) и решая
относительно Д17Вых с учетом (17), получаем
=4,ФУА^вх -ЛыхАЛ +-^УуЧд;у (18)
Л ст **• ст
где коэффициент стабилизации
К„ =^ф(1 + ЛЛки)=^ф(1 + Ж()У1) (19)
определяется с учетом (13) и равенства
(20)
эквивалентного (19); выходное сопротивление
= —-— » —г-—; (21)
вых l + hMKllVl 1 + FK^’
hM = Нм — относительный коэффициент усиления ШИМ-2;
К„=КлКу; v1=17BX/t76; K^~KRKyU^/и„ — коэффициент усиления
разомкнутого контура от входа компаратора DA1 до выхода
усилителя рассогласования DA2 (при (7б=£7вх) (см. рис.4.1).
Равенство (J8) можно также записать в виде
А(^ВЫХ _ с А^ВХ с Д/д Af/On
~й~~ - -у— + Ч J- + Чп 7Г‘-
вых вх 1 н оп
(22)
где чувствительности выходного напряжения к изменениям
напряжения С7ВХ, тока /н и напряжения Uon определяются
выражениями:
VBX С^вых 1 (23)
^вьгх 6t7BX /srCT’
’ __ ^^вых _ _ ^вых .
1к ивъп ’ 8JK R ’
DDLA Г1
= £ол Э^вых _ Uon ^КУ
,т suon иъу
(25)
145
Преобразователь с комбинированным управлением
Для увеличения коэффициента стабилизации и сгла-
живания низкочастотных пульсаций, поступающих на вход
ППН, иногда вводится управление по входному напряжению
ивх (ППН с комбинированным управлением). При этом не-
стабилизированное напряжение ивх, минуя силовую часть
ППН, непосредственно воздействует на ШИМ, изменяя не-
обходимым образом значение у [14].
Одним из наиболее простых способов реализации принци-
па управления по входному напряжению является подключение
входа ППН (рис.4.1) через резистор R5 ко входу усилителя рас-
согласования. В этом случае управляющее напряжение
иу = Ку (Uon - Кдис) - Ку ивх, (26)
где Кву - (Л3][/?4)/(/^3||/?4 + ~ коэффициент передачи вход-
ного возмущения ППН на вход усилителя DA2. Другой спо-
соб реализации этого принципа заключается в том, что сиг-
нал, пропорциональный входному напряжению пвх, подается
непосредственно на вход компаратора DA1.
С учетом (6) и (26) находим
ДУ = ~~{^у[л^оп - *дД«с('о)]- КуКву^ивх(10)}.
Полагая входное напряжение идеально сглаженным, когда
Днвх(4)) = ДПВХ, подставляя выражение для Ду в уравнение (15)
и решая его с учетом (17), снова приходим к равенству (18) с
измененным выражением для коэффициента стабилизации:
М +\Xhv1)
(27)
где Кв—КуКву — коэффициент усиления цепи регулирования по
возмущению от входа ППН до входа компаратора. Выходное
сопротивление по-прежнему определяется формулой (21).
146
За счет регулирования по возмущению происходит допол-
нительное изменение среднего значения выходного напряже-
ния, равное -hMKBvi&.UBX, которое при выполнения условия
«И = у (28)
компенсирует изменение А/7Еьге, вызванное передачей возмуще-
ния по основной цепи. В этом случае выходное напряже-
ние ППН не зависит от входного и согласно (27) -> «>.
Регулирование по входному напряжению происходит с вы-
соким быстродействием. Однако показанная на рис.4.1 схема
регулирования по возмущению не обеспечивает инвариантно-
сти по отношению к изменениям входного напряжения и его
низкочастотным пульсациям, поскольку при постоянном Кв
условие (28) выполняется только при одном значении вход-
ного напряжения vj. Коэффициент усиления ШИМ-2
h„ = HMU&IT согласно (11) также зависит от Поэтому
для выполнения условия (28) в широком диапазоне изменения
vi необходимо изменять коэффициент усиления Кв так, чтобы
= х2 ср = const. (29)
Для этого с ростом v( увеличивают амплитуду пилообразного
напряжения Un или крутизну нарастания этого напряжения
19]. Сложность зависимости Un от vj при учете йч, которую
необходимо обеспечить, приводит к тому, что и в этом слу-
чае условие (29) выполняется лишь приближенно.
4.2. Преобразователи с ШИМ-2 и обратными связями
по выходному напряжению и току реактора
Для построения оптимальной системы управления им-
пульсным ППН необходимо контролировать все координаты
вектора состояния силовой части, т.е. должны использовать-
ся многоконтурные системы управления. Поскольку вектор
состояния определяется неоднозначно, то и контролируемые
147
координаты могут быть разными. В частности, в качестве пере,
менных состояния ППН с однозвенным ГС-фильтром могут
быть выбраны напряжение на конденсаторе ис и его первая
производная йс. Это означает, что полную информацию о
состоянии можно получить, контролируя только напряжение
ис и получая производную ис с помощью дифференцирую
щего звена. Однако реальные аналоговые дифференцирующие
звенья могут лишь приближенно воспроизводить производную
от любого сигнала и отличаются высокой чувствительностью
к помехам. Этим, в частности, объясняются невысокие качест-
венные показатели ППН с корректирующими звеньями, вве-
денными в цепь обратной связи по выходному напряжению.
Введение дополнительной обратной связи по току реак-
тора фильтра (рис.4.9) или току конденсатора фильтра
ic—Cduc/'dt при правильном выборе параметров цепи обратной
связи позволяет улучшить динамические показатели качества
ППН. Схема состоит из двух замкнутых контуров регулирования,
148
причем сигнал внешнего контура и , снимаемый с выхода
усилителя рассогласования DA2, является задающим для
внутреннего контура регулирования тока реактора (так назы-
еаемое подчиненное регулирование). Вводя ограничение
сигнала на входе внутреннего контура с помощью стабили-
трона VD2, в такой схеме можно ограничить ток реактора и
регулирующего анзистора VT1 в переходных режимам на
некотором уровне. При перегрузках по току ППН автомати-
чески переходит в режим о аничения тока. Переходные
процессы при больших возмущениях имеют меньшую дли-
тельность и меньшее перерегулирование, чем в ППН с об-
Рратной связью по напряжению (рис.4.1).
Напряжение пропорциональное току реактора,
подается с датчика тока ДТ на инвертирующий вход сумми-
рующего усилителя DA3. Реализация датчика тока ДТ может
быть различной, в простейшем случае может использоваться
низкоомный безындуктивный шунт. Заметим, что при ис-
пользовании резистивного шунта важно включить его так,
чтобы напряжение Ядт1/£ не действовало на входе цепи об-
ратной связи по напряжению.
В импульсных ППН с модуляцией момента спада им-
пульса вместо обратной связи по току реактора может ис-
пользоваться обратная связь по току коллектора транзистора
/к, который на интервале tQ совпадает с током /д (рис.4.10).
Дискретная система реагирует только на значение -ока
'к 01)= '7 01), и исчезновение сигнала тока zK после выклю-
чения транзистора никак не влияет на систему.
149
На рис.4.11 изображены временные диаграммы для ста-
ционарного режима работы ППН с обратными связями по
выходному напряжению и току реактора (сплошные линии)
и возмущенного режима (штриховые линии); «м — напряжение
на выходе АЗ'-триггера. Для общности рассматривается случай,
когда транзистор включается с запаздыванием на /з1 от мо-
мента формирования сигнала включения на выходе ШИМ-2,
а выключается с запаздыванием на время /з2 от момента
когда оканчивается импульс им па выходе ШИМ-2 и форми-
руется сигнал выключения транзистора.
При отсчете времени от момента начала нарастания пило-
образного напряжения un(f), совпадающего с моментом фор-
мирования очередного тактового импульса ^(г), необходимое
условие формирования импульса на выходе ШИМ за период
дискретизации Т имеет вид:
wy(o)> ип(+0), (30)
где в случае, когда напряжение un(f) нарастает, начиная с
нуля, ип(+0) = 0.
150
При условии иу(0)<«п(+0) в начале периода Т на‘вход R
триггера с выхода компаратора DA1 подается положитель-
ный потенциал, соответствующий логической 1. Поэтому
при поступлении тактового импульса на прямом выходе
триггера сохраняется напряжение, соответствующее логическо-
му нулю, и импульс им на выходе триггера не формируется.
В граничном случае, когда иу(0) = ип(+0), импульс на
выходе ШИМ появляется при условии
uy(o)>tfn/7\ (31)
когда скорость нарастания управляющего напряжения в начале
периода йу(0) больше скорости нарастания пилообразного
сигнала ип(г).
Момент t\ окончания импульса на выходе ШИМ опре-
деляется из уравнения
«у('1)=«п(Г1)- (32)
При отсутствии ограничения напряжения на выходе
усилителя рассогласования DA2 управляющее напряжение оп-
ределяется формулой—
«у = Кх K2(Uon - Клис) - , (33)
где /Q — коэффициент усиления суммирующего усилителя
DA3 для неинвертирующего входа; К2 ~ коэффициент усиле-
ния усилителя рассогласования DA2 для инвертирующего вхо-
да; Uon = t/oni(^2 +1)/^2 ~ опорное напряжение, пересчи-
танное к инвертирующему входу усилителя DA2;
^дт = ^дг1(^1 - 1)/^ — сопротивление передачи датчика тока
ДТ, пересчитанное к неинвертирующему входу DA3.
Переходя в (33) к относительным координатам пространст-
ва состояний Xi = , х2 = , получаем:
иу = U„ [ЛГ0« - А'оЛ (т) - К0х2(т)], (34)
151
где коэффициенты усиления Kq, определяются выражениями;
Ко = КфК^К2и6/ип;
= к^и^ЦиМ- 5)
и = иоп/(КфКдиъ) - относительное управляющее воздействие
замкнутой системы; т = t/T^ — относительное время.
В режиме ограничения имеем
K2(Uon-Kauc)>UOiV, (36)
где t/oip — уровень ограничения, равный напряжению стаби-
лизации стабилитрона VD2. Тогда управляющий сигнал на
входе компаратора DA1
z/y = orp — Адг1£)= UgXT(xj3 — Xj) = f/n^foT(x£3 — Xj), (37)
где x13 = <7огр7?б/{K^U^R^) — относительный сигнал задания
тока; = K^K^R^Ijp — коэффициент усиления контура
регулирования тока, отличающийся от Ащ. отсутствием мно-
жителя Цб/ип.
Условие режима ограничения (36) представляется в виде
~-{и-х2)> х1з. (38)
Л0т
Полагая линейное изменение пилообразного напряже-
ния во время рабочего хода
уравнение (32) преобразуем к виду
—-X0w + X0tXi(ti)+ KqX2P()-0, (39)
гп
если не выполняется условие ограничения (38), и к виду
-^От^Чз ^Ot^I (Т1) = 0»
тп
если выполняется условие (38).
152
В соответствии с рис.4‘.П длительность импульса на входе
фильтра определяется равенством
А) — h “* 42 41,
а относительная величина то — *о/Тф — равенством
то = 11 + тз2 — тзЬ
где т31 = 41/^ф 5 тз2 = 4т/^ф-
В большинстве реальных ППН вводится ограничение
длительности импульсов на выходе ШИМ
Ушим = 4 *• Ушишпах
и, соответственно, коэффициента заполнения импульсов на
входе фильтра
У < Утах,
где обычно Утах41'!- Ограничение у, в частности, обусловлено
особенностями работы реальных формирователей импульсов
управления ФИ.
Линеаризация ШИМ-2
Линеаризация импульсного ППН с обратными связями по
выходному напряжению и току реактора проводится так же,
как и в случае схемы только с одной обратной связью по вы-
ходному напряжению (рис.4.5 - 4.8 и соотношения (5) - (7)).
Однако в данном случае дополнительно учитываются запаз-
дывания при включении и выключении транзистора /з] и /з2>
поэтому моменты срабатывания ШИМ-2 и формирования
спада импульса «Вх.ф(0 не совпадают (рис.4.11). Обозначая
через /0, как и ранее, длительность импульса напряжения на
входе фильтра иВХф(У), для момента пересечения кривых на-
пряжений ип(0 и uy(f), когда срабатывает ШИМ-2, примем
обозначение Причем время отсчитывается от момента
Подачи очередного тактового импульса wT, совпадающего с
Моментом начала линейного изменения напряжения un(t).
С учетом сказанного вместо равенств (6), (7) имеем
AZj = 5MFAиу (/j - f31), (40)
153
где 5М = 1/йп(г, — G1) — крутизна модуляционной характери-
стики ШИМ при Wy(r) = const, а фактор пульсаций
Г = [1-5мйу(^-/з1)р; (41)
время отсчитывается от момента включения транзистора.
При /31 = /32 = 0, fj - /Ь равенства (40) и (41) совпадают с
(6) и (7). Однако в схеме с обратной связью по току реактора
сигнал Atty(t) претерпевает разрыв в момент выключения
транзистора:
A«y (t0 - 0) + Ану (10 + 0). (42)
ШИМ-2 реагирует на левое значение сигнала Д«у(го-О).
Поэтому в равенства (40) и (41) следует подставлять левое
значение сигнала Аиу(/0 -0). При учете запаздывания
момент срабатывания ШИМ-2 t\ - /31, отсчитываемый от мо-
мента включения транзистора, предшествует моменту вы-
ключения транзистора /0 и наличие скачка в сигнале Ану(/)
не влияет на соотношения (40) и (41).
Рассмотрим приближенную методику определения фак-
тора пульсаций F и коэффициента усиления ШИМ-2 Нм,
основанную на предположении о малости пульсаций выход-
ного напряжения и потерь мощности в силовой части ППН.
Тогда уравнения (1.1) перепишем в виде:
и ‘ <43>
где £4ых — среднее значение напряжения цс(0;
1ц = ^4ых / ^ + 4.д.сР “ среднее значение тока нагрузки. Из
первого уравнения системы (43) с учетом равенства
7/вь;х » UBXy для интервала включенного состояния регули-
рующего транзистора Го, на котором ивх ф = 17вх, находим
т М т U УТ ( ч Пвх(1-у)
lL = 4 - -5- + - , 7 f=4 --rfy- (1 - y)y+-^4- - G (44)
£ A ZA Jj
154
где время отсчитывается от момента включения транзистора;
размах пульсаций тока реактора фильтра Д/ определяется из
выражения (1.92). Тогда
^lL _ ^вх ft ~ У) /д<:\
Из второго уравнения системы (43) с учетом (44)
«с(б -'з1)=7?['г(б-Уз1)-^н] = %г(1-у)Гу1<46)
С- X/Lz \ )
где у] = (.'] t3i)/T = у-уз2 ~ относительная длительность
промежутка времени между моментами включения транзистора
и сравнения сигналов ып(0 и «у(/); у32 = *з2/? ~ относитель-
ная д лительность задержки при выключении транзистора.
Дифференцируя равенство (33) и подставляя в него вы-
ражения (45) и (46), найдем производную
4y(/j -гз1)=-ЗДАГ2 ^(1-у)ГУ1 -^|-ВДт (47)
При 5М =T/Un с учетом (47) и (41) имеем
l = l + (l-y)-7L.[^0Vify1+ (48)
F V ”4lc[ ° I ' 2)4LC 46 J
где z/6 = ^L/Cj^ — относительное волновое сопротивление
Фильтра; vj =t/BX/J76.
Общий коэффициент усиления ШИМ-2 согласно (10) и (47)
~ (. \ (f ^mF—
ип VI ?3l) «У VI G1)
т 1 (49)
где ^ип/иб-, Кк=КаКгК2- K^K^/Ik- При у = уь ЛЬТ=О,
^т=0 формулы (48) и (49) превращаются в соотношения (9) и (11).
155
Кривые, построенные по формуле (48) (рис.4.12), пока-
зывают, что фактор пульсаций уменьшается с ростом коэф-
фициентов усиления Kq, и может быть существенно
меньше 1. Общий коэффициент усиления ШИМ-2 может
рассчитываться по формуле (49), либо по известному факто-
ру пульсаций: Нм = SMF = TF/Un, причем коэффициенты
усиления Kq, связаны с коэффициентами Кн, Кт:
Линейная импульсная модель
В данном случае с некоторыми уточнениями справедлива
импульсная модель на рис.4.8, где импульсный элемент ИЭ1
должен генерировать 8-импулъсы в моменты выключения тран-
зистора, площади которых, однако, в соответствии с равенст-
вом (40) пропорциональны значениям управляющего сигнала в
предыдущие моменты пересечений кривых пилообразного и
управляющего напряжений (рис.4.11). В связи с этим в им-
пульсную модель (рис.4.13) вводим импульсный элемент ИЭ1,
генерирующий 8-импулъсы в моменты /j и тем самым фикси-
рующий дискретные значения сигнала Д«у(/1-/31), а последова-
тельно с ИЭ1 вводится звено запаздывания на время
Импульсный элемент ИЭ2, как и на рис.4.8, генерирует
импульсы конечной длительности to во время включенного
156
состояния транзистора, амплитуда этих импульсов изменяет-
ся по закону Дмвх(/), т.е. ИЭ2 осуществляет амплитудно-
импульсную модуляцию 2-го рода (АИМ-2).
Для выделения в ЛС-фильтре точки съема сигнала, про-
порционального току ii, заметим, что в соответствии с урав-
нениями (11), переписанными в операторной форме
/7 = б'О’Жх.ф - ис), ис = Z(p)(iL - /нд), (51)
LC-фильтр можно представить в виде двух звеньев первого
порядка с передаточными функциями
g(p)= —-; Z(p) =-Д-, (52)
Lp + г RCp +1
охваченных цепью отрицательной обратной связи по выход-
ному напряжению ис (рис.4.13). Тогда передаточная функ-
ция фильтра записывается в виде
WAp\- ____
(53)
гДе K$=jR/(R+r) — коэффициент передачи фильтра на посто-
янном токе; 7ф = ^K^LC — постоянная времени фильтра;
157
a = (г/L+l/RC)/2 — коэффициент затухания фильтра;
со0 = 1/7ф - а2 — собственная частота фильтра.
Статическая точность
Для импульсного ППН с обратными связями по выход-
ному напряжению и току реактора фильтра (рис.4.9) из (40)
и (33) при S—T/Un имеем
дУ1 -t3l)].(54)
*-'гт
Считая в равенстве (44) переменными величины t/BX, /н
и у, находим отклонение кривой тока iL при переходе
от одного установившегося режима к другому:
ML[t) = д/н -т^-^уьит -2у>ду + ДДВХ -
L н 2L 2L L
Свх/ А . т 1-у
—Iх Ду = Д7Н +---L
L н L
ДС/ВХ
L 2
Подставляя t = tx - t3l = ухТ, получаем
Д/Д/,-/31)=Д/ИТу(1-у)Гу!- Апвх-у+Лду. (55)
Решая уравнения (54), (55) относительно Ду, найдем
ДУ = 77“ Д U°n " Кн(zi “ z3i) - ^ЛбД/н -
(56)
гДе Уз2 ~ Y " У1- Подставляя выражение (56) в равенство (15)
при допущении Дпс(б -^з1)=д^вых, приходим к соотношению
^BbIX=^At4x-W^K+
С fl _
% 7^
----5,(5?)
Т
уЦс
158
в котором коэффициент стабилизации
l + f£oVfMl- у3Л
Кст = &<Ь------------------
1 y) т
q5 (Л 2J4LC
выходное сопротивление
(58)
г /1 । _ р ^Ч)т^1 Г1 2~Y32 1 Т уЦс + FKq^Rq
‘'BblXl 1 + FK0Vi - р ^0т^1 <7б fl 1 I2 Уз2> т JLC
(59)
Как видно из (58), (59), заметное влияние запаздывания
при выключении регулирующего транзистора у32 на коэффи-
циент стабилизации и выходное сопротивление возможно
лишь в тех случаях, когда у32 соизмеримо с 0,5. При отсутст-
вии обратной связи по току (Kqt= 0) из (58), (59) получаются
формулы (19), (21), в которых F теперь определяется по
формуле (48) с учетом запаздывания. Слагаемое FKq^x^Rq в
числителе равенства (59) вызывает существенное увеличение
7?выхЬ связанное с введением отрицательной обратной связи
по току. Для устранения этого недостатка в установившемся
режиме с датчика тока должен поступать сигнал - /н),
т.е. необходимо исключить постоянную составляющую тока
«£. Тогда в правой части равенства (55) исключается первое
слагаемое Д/н, а формула (59) принимает вид
^еых2
\ — F *OtV1
%
^0tvI
<7б
(60)
- Г
1 + /'*>, - F
На рис.4.14 и 4.15 приведены зависимости, построенные по
Формулам (58) - (60) для г, = 1, уз2 = 0. При каждом сочета-
нии параметров Ко и у штриховая линия на рис.4.14 соответ-
ствует случаю = 0, а сплошная — К^/д^ = 4. Выходные
159
сопротивления отнесены к волновому сопротивлению
фильтра L/C:
Кривые, рассчитанные по формулам (59) (сплошные ли-
нии на рис.4.15) и (60) (штриховые линии) для (?о=Ю,
^ог/9б=4, подтверждают возможность заметного снижения
выходного сопротивления ППН в случае исключения посто-
янной составляющей из сигнала обратной связи по току ре-
актора, например, при использовании обратной связи по то-
ку конденсатора фильтра.
160
4.3. Особенности функционирования систем управления
с ШИМ-2 в повышающем и инвертирующем ППН
Для повышающего и инвертирующего ППН остаются
справедливыми приведенные в §4.2 уравнения и условия
(30) “(42). Однако изменение во времени управляющего
напряжения uy(f) при сравнении в компараторе с пилообраз-
ным напряжением un(t) будет иным. Это существенно сказы-
вается на функционировании системы управления. В частности,
поскольку на интервале включенного состояния регулирую-
щего транзистора справедливы приближенные уравнения
то с учетом (33) производная управляющего напряжения
uy(t)=-KRKxK2 =uSk. М (61)
Cll Cli 1 С/ б'_/ J
где Ко = KaKlK2UG/Un ; ХОт =Л'12?ДТ ^д/С^б^п); vx=UBXIU6.
В отличие от понижающего ППН здесь производная
йу(Г) может быть как положительной, так и отрицательной,
т.е. управляющее напряжение в момент сравнения с пилооб-
разным напряжением может как возрастать так и убывать.
При этом должно выполняться условие:
йу(/1-0)<йп(/1),
которое в случае линейно нарастающего напряжения ua(t)
преобразуется к виду
-^=[код^и-К°^\<1, (62)
y!LC{ Йе J
где vH = IvRbIU^ .
В случае uy(tx -0) = йп(/]) согласно равенству (41) фак-
тор пульсаций т.е. стремится к бесконечности коэф-
фициент усиления широтно-импульсного модулятора
161
HM=SMF, входящий в равенство (40). Это приводит к нару-
шению устойчивости замкнутой системы.
Подставляя в (41) выражение (61), получаем
| = 1 + , (63)
т.е. условие (62) эквивалентно неравенству i/F > 0.
Результаты расчетов по формуле (63) представлены на
рис.4.16. При Аог=О фактор пульсаций повышающего и ин-
вертирующего ППН становится больше 1, в то время как у
Статическая точность повышающего и инвертирующего ППН
с ШИМ-2
Дифференцируя выражение (2.41) для повышающего ППН
при переменных U^, у и /н, находим малое приращение
Д(7ВЬ,Х = — Д^вх +
ЬЫЛ 1 Вл
1-у
Ду
1-yJ(1-y)2
оду"-*64»
162
Аналогично, дифференцируя выражение (3.30) для ин-
вертирующего ППН, получаем равенство
АС/вых = - 0Т^Л/н‘(65)
Выражение для приращения Д.у = А1а/Т = ъЩТ опреде-
ляется, как и в случае понижающего ППН, при помощи со-
отношения (6) или (40), описывающего работу ШИМ-2. Для
схем с обратной связью по выходному напряжению, под-
ставляя выражение (16) в (64) или (65) и полагая
дис(^) ~д^вых> приходим к равенству
где
n
IVBHX
\TJ -
V ВЫХ тт
V BX
FKg Vj
_ n д T ,
p '‘ВЫХ^Н "*
“ст
, _ 2vh96
1 (i-y)Qb.
2vh<76
(1-Y)2+FKon-
L (I-y)CoJ
Д£оп
1а-г)2+Жок-
(I-Y)^bx I L
_2Мб_
(I-y)Go
2vH?6
= r (1-у)2+Ж0 V,-
L (!-y)CoJJ
-1
(66)
(67)
(68)
Qv=jLiClr-, q^jLiClR*.
Пренебрегая в квадратных скобках влиянием малого со-
противления г, из (67) и (68) получаем простые формулы:
ь' _ 1 , FKqV[ . _
74СТ 1 "г ,, , Э 3 7ХВЫХ
(1-Y)
г
(1-Y)2^ct
(69)
На рис.4.17 представлены зависимости, построенные по
Формуле (69) для vj-l; y=0,5; Aq=10 (сплошные линии) и
(штриховая линия).
163
Для повышающего ППН с комбинированным управле-
нием аналогично (27) получаем
Р- — Г' 1 ^Кв v__________^НГ Z-7MX
^сг.ку Лст|1 J_yp ’ ('Q>
где Кв = KByKv U5/Un — коэффициент усиления цепи регу-
лирования по возмущению от входа ППН до входа компара-
тора; Кву — коэффициент передачи входного возмущения
ППН на вход усилителя рассогласования; — коэффици-
ент стабилизации при отсутствии регулирования по возму-
щению, определяемый по формуле (67).
В случае инвертирующего ППН
управлением будем иметь
с комбинированным
/Г — К 1 _
/VCT.Ky /VCT|1
FKB
И-
2/нг
-1
(71)
Выходное сопротивление повышающей и инвертирую-
щей схем с комбинированным управлением определяется
формулой (68).
164
При определении коэффициента стабилизации и выход-
ного сопротивления повышающего и инвертирующего ППН
с обратной связью по току iL для общности будем учитывать
запаздывание при включении и выключении регулирующего
транзистора. В рассматриваемом случае аналогично (55) по-
лучаем значение отклонения тока реактора при переходе от
одного установившегося режима к другому
т ( v")
A^i -'з1 ~°)=7 Y1 Ивх
UB_T 1К 1 АГН
2L (1-у)2 J I-Y
(72)
а также приращение относительной длительности включен-
ного состояния регулирующего транзистора
Ко
У
71 2
А^ВХ ,
и. (1-yX76.
(73)
1-/Х-От
у
. 1 2Z (1-у)Ч
-*з1) , v
L
Как видно, система реагирует на увеличение «с(й~(з1) и
t/BX уменьшением у, что способствует повышению коэффи-
циента стабилизации. Уменьшение же у с увеличением А/н
ухудшает статическую точность. Поэтому, как и в понижающем
ППН, целесообразно исключить постоянную составляющую в
выходном сигнале датчика тока /д или ввести обратную связь
не по току реактора i£, а по току конденсатора /ц. Будем счи-
тать, что введена именно такая обратная связь. Соответст-
венно, в выражении (72) принимаем А/н=0, ZH=0. С учетом
этого, пренебрегая падением напряжения на сопротивлении
г во втором слагаемом в правой части (64) или (65), подста-
вим выражение (73) в (64). Тогда для повышающего ППН
(1-y)_____2£_
FK^Vy TR6 fl А
1 тгти Н
(74)
165
а для инвертирующего ППН
1 + ^к_ЖотГ1^
= ----1-----7--2 ,х, (75)
FK^ ТЪ у2
*’И L
где Yi = у - уз?; Уз2 = — относительное запаздывание при
выключении.
Выходное сопротивление в обеих схемах
R -г _ 1-^ОтИ 7^/(2!)
вый FKovx + (1 - у)2[1 - FK^ T^/(2L)] ’
4.4. Особенности линеаризации системы управления
с двусторонней ШИМ-2
На рис.4 18,а представлены временные диаграммы, иллю-
стрирующие работу ППН с двусторонней ШИМ-2. Поскольку
учет задержек /31 и /з2 может быть осуществлен аналогично рас-
смотренному случаю модуляции спада импульса (рис.4.9, 4.11),
доя упрощения будем полагать Z3i=Zj2=0. Предположим, что
пилообразное напряжение ua(f), подаваемое на один из входов
компаратора, содержит участки линейного спада длительностью
Т) и линейного нарастания длительностью Т2.
В данном случае каждый импульс последовательности
А«вх.ф(0 (рис.4.18,о) представляется в виде суммы трех импульсов:
два из них имеют конечную амплитуду (/вх и малые длительности
AZj и AZ2, зависящие от Auy(Z); третий имеет конечную длитель-
ность (о и малую амплитуду Д«вх(/). Отсчитывая время от нача-
ла импульса АиВХ ф(#), аналогично (6) и (40) можем записать:
ДЛ = SMifiA«y(-0);
Д?2 = ^м2^2^иу(^0 ~ 0)>
(77)
166
где время в Лау(/) отчитывается от момента формирования
сигнала на включение регулирующего транзистора; крутизна
модуляционной характеристики ШИМ-2 для фронта и спада
импульса
-|«п(О)Г’ =71/^п; SM2 = |«п('о)Г = T2/U„-, (78)
факторы пульсаций для фронта и спада:
F,-[l + 5M1Uy(0)p; р9)
= [| + 5M2«y(fg)] 1
Из указанного разложения импульса на входе фильтра
Лйвх.ф(0 на три импульса вытекает линейная импульсная модель
167
ППН с двусторонней ШИМ-2 (рис.4.18,6), где импульсные
элементы ИЭ1 и ИЭ2 генерируют 8-импульсы в моменту
формирования сигналов включения и выключения регули-
рующего транзистора; (Уос(р) ~ передаточная функция цепи
обратной связи. Площади этих импульсов согласно (77) про-
порциональны значениям Дну(0) и Диу(/Ь) управляющего
сигнала. Импульсный элемент ИЭЗ формирует импульс ко-
нечной длительности t0 и малой амплитуды Д«вх(0-
Учет задержек /з1 и t3z приводит к необходимости введе-
ния в обоснованную модель (рис.4.18,б) звеньев с чистым
запаздыванием после импульсных элементов ИЭ1, ИЭ2 и
соответствующих поправок в соотношения (77) — (79).
На рис.4.19,о представлены временные диаграммы для
понижающего ППН с модуляцией спада импульса, а на
рис.4.19,6 — соответствующая линейная импульсная модель.
Этот вариант может рассматриваться как частной случай
системы с двусторонней ШИМ-2, когда 72=0.
168
4.5. Линейная импульсная модель понижающего ППН
в режиме прерывистого тока
В соответствии с уравнениями (1.1) для силовой части
ППН справедлива структурная модель, представленная на
рис.4.20, я, где передаточные функции G(p) и Z(p) определя-
ются равенствами (52). Ключ К1 замыкается на время /0,
ключ К2 — на время to+tc, где tc — время спада тока iL до ну-
ля. Для упрощения полагаем Дгнд=О. Эта модель преобразу-
ется к виду, представленному на рис.4.20,6, затем - к виду
на рис.4.20,в, где КЗ - ключ, замыкающийся на время
T-to+tc; и*вх 1 ис ~ сигналы на выходах ключей К1, КЗ.
е
Рис.4.20
На рис.4.21 показаны временные диаграммы для стацио-
нарного режима ППН (сплошные линии) и возмущенного
режима (штриховые линии). Разность кривых возмущенного
л .
и стационарного режимов соответствует сигналам Дывх(/),
Д*т(0, Д«с(0» действующим в структурной схеме для малых
отклонений от стационарного режима (рис.4.22). Согласно
рис.4.20,в и 4.21 на вход звена 1Рф(р) подаются четыре им-
пульса: 1) импульс конечной высоты СБХ и малой длительно-
сти Д^=Д/]; 2) импульс малой высоты Д«Вх(0 и конечной
Длительности 3) импульс конечной высоты -яс(7о+4) и
Малой длительности Д/о+Д^; 4) импульс малой высоты
169
-&uc(t) и конечной длительности T-to+tc. В соответствии с
этим к суммирующему звену на рис.4.22 подключаются че-
тыре импульсных элемента.
Первые два из перечисленных импульса учитываются в
схеме на рис.4.22 так же, как и в импульсной модели ППН
для режима не-
прерывного тока
(см. рис.4.11 и
4.13). Импульс
малой длительно-
сти ДГ0=ДГ1 заме-
няется дельта-
импульсом пло-
щадью
формируемым им-
пульсным элемен-
том ИЭ1 в мо-
мент и
задержанным на
время /з2. При от-
счете времени от
момента включе-
ния регулирую-
щего транзистора
в режиме прерывистого тока остаются справедливыми соот-
ношения (40), (41). Импульс малой амплитуды Д«вх(1) ап-
проксимируется прямоугольным импульсом Д«вх(0)52(0, где
52(0 — функция, описывающая один прямоугольный им-
пульс единичной амплитуды и длительности
Импульс конечной высоты -лс(/0+ф) и малой длитель-
ности Д/о+Д^с заменяется дельта-импульсом, формируемым
170
импульсным элементом ИЭЗ в момент перехода тока if через
нуль. Непосредственно из рис.4.21 следует, что
Д'о + Д/с = -Д/Л(/о + tc - 0)& I ] ,
V at ir=?o+?c-o J
откуда с учетом равенств
diL _ нс(0 + «г(0
Л-" £ ’
‘L^O +tc)~ О
находим
AZ0 + ДГС = L —с-~0). (80)
uc(t0+tc)
Тогда площадь указанного дельта-импульса высоты
-udJo+tc) и длительности ДГО+Д/С
~ис(*о + ^с)(а?о + М;) = ~L^ii(t0 + tc - О).
Этому равенству соответствует подключение входа им-
пульсного элемента ИЭЗ к точке с сигналом Azx(Z) и введе-
ние пропорционального звена -L (см. рис.4.22).
171
Поскольку на интервале паузы тока
Д^с(0 ~ + + 0) _ *о _ ^с)> (81)
где йф2(0 определяется из (1.73), то импульсный элемент,
формирующий импульс малой высоты А«с(0 и длительности
T-tQ-tc, можно представить в виде соединения идеального
импульсного элемента ИЭ4, генерирующего дельта-импульс
в момент t=tQ+tc перехода тока /£ через нуль, и формирую-
щего звена с функцией, описывающей один импульс:
S4(t) =
Аф2(0
о
при О<г<Г-/о-/с
при Т -10 - tc < t < Т.
(§2)
Здесь и в дальнейшем функции, описывающие импульсы
формирующих звеньев, записываются при отсчете времени
от момента поступления дельта-импульса на эти звенья.
Как видно из (81), импульсный элемент ИЭ4 реагирует на
правое значение переменной b.uc(f) в момент t=t0+tc. Однако
в нашем случае в связи с тем, что разность степеней полино-
мов знаменателя и числителя передаточной функции Иф(р)
равна двум,
&ис (?о +tc + О) = Диц (^о + 4 ~ 0) •
Интересно сравнить динамическую модель на рис.4.22 с
импульсной моделью для импульсного преобразователя с
нагрузкой, состоящей из индуктивности L, активного сопро-
тивления г и противоЭДС Ел. Поскольку в [17] противоЭДС
Еп, аналогичная напряжению ис на конденсаторе в схеме,
приведенной на рис.4.9, считается постоянной, то величина
Л*о + ДГС =^е~,с/ТоЫо,
пропорциональна ДГ0; 70 = L/r Вследствие этого отрица-
тельные дельта-импульсы, аналогичные получаемым с по-
мощью ИЭЗ на рис.4.22, можно заменить задержанными на
время tc импульсами, снимаемыми с элемента ИЭ1,
172
и исключить ИЭЗ. Из равенства (80) следует, что в ППН с
ДС-фильтром такой возможности нет. Модель на рис.4.22 от-
личается также наличием импульсных элементов ИЭ2, ИЭ4.
4.6. Линейные импульсные модели инвертирующего
и повышающего ППН
Для составления линейной импульсной модели инверти-
рующего ППН (см. схему на рис.4.23 и временные диаграм-
мы на рис.4.24), как и в случае режима прерывистого тока
понижающего ППН, воспользуемся подходом, изложенным
в [18] применительно к резонансному преобразователю с
широтным регулированием. При этом время t будем отсчи-
тывать от момента включения регулирующего транзистора.
Рис.4.23
Для силовой части ППН справедлива структурная мо-
дель, показанная на рис.4.25. Ключ К1 замкнут на интервале
когда регулирующий транзистор включен, ключи К2, КЗ в
это время разомкнуты, сигналы на выходах ключей
* * * *
пвх - пвх> Д = 0, ис = 0 . На остальной части периода, когда
173
транзистор выключен, ключ К1 разомкнут, ключи К.2, КЗ
замкнуты, сигналы на выходах ключей и*вх = 0 , i*L = iL,
ис = ис . Передаточные функции G(p), Z(p) определяются
выражениями (52). Справедливы уравнения
"с = адЙ - гн.д); г/. = ад(«вх - «с)-
Очевидно, сигнал i*L совпадает с током диода силовой части.
Пусть в ППН имел место стационарный режим (сплош-
ные линии на рис.4.24) и из-за воздействия малых возмуще-
ний возник возмущенный режим (штриховые линии на
рис.4.24). Разность кривых возмущенного и стационарного
174
режимов соответствует сигналам, действующим в структур-
ной схеме для малых отклонений от стационарного режима
(рис.4.26), в которой принято Д/нд = 0 .
Каждый импульс ДпБХ(г), подаваемый на вход звена G{p),
представляется в виде суммы двух импульсов: один из них имеет
конечную высоту £7ВХ и малую длительность Д/Ь—ДА, второй —
конечную длительность to и малую амплитуду' Д^вх(/), в общем
случае изменяющуюся во времени. Первый из этих импульсов
Рис.4.26
На рис.4.26 заменяется дельта-импульсом, генерируемым
Идеальным импульсным элементом ИЭ1 в момент /=А~А1 и
175
задержанным на время Гз2 звеном чистого запаздывания.
Длительность этого импульса связана с управляющим на-
пряжением «у соотношением (40).
Второй из указанных импульсов при медленном измене-
нии входного напряжения «вх в течение периода Т аппрок-
симируется прямоугольным импульсом и отражается на
рис.4.26 идеальным импульсным элементом ИЭ2, срабаты- ।
вающим в момент й=0 включения транзистора, и формиро-
вателем прямоугольных импульсов длительности с функ-
цией 54(Г), описывающей один импульс:
54(0 =
1 при
0 при
0 < t< t0,
t0<t<T.
Каждый импульс также подаваемый на вход
звена G(p), представляется в виде суммы двух импульсов, один
из которых имеет конечную высоту -tzcOb) и малую длитель-
ность Д Го, второй — малую высоту Д«с(0 и конечную длитель-
ность T-to. Необходимо учесть, что согласно рис.4.25 сигнал
«с (Г) инвертируется перед подачей на звено G(p).
Аналогично импульс подаваемый на вход звена
Z(p), представляется также в виде суммы двух импульсов,
один из которых имеет высоту и малую длительность
Д4), второй — малую высоту ДГ/,(0 и конечную длительность
T-Iq. Импульсы малой длительности A/q=A/| с амплитудами
-«с(*Ь) и -litto) заменим дельта-импульсами, площади которых
соответственно равны -нс(/0)АГ] и -/£(Го)М- Они формируют-
ся в моменты выключения транзистора, так же как дельта-
импульсы, снимаемые с выхода звена чистого запаздывания
на время ^2- Согласно соотношению (40) площадь дельта-
импульсов, снимаемых с выхода звена запаздывания схемы
на рис.4.26, равна ДГЬ Следовательно, для получения дельта-
импульса с площадью -/£(Го)ДА, подаваемого на вход звена
Z(p), достаточно импульсы с выхода звена чистого запаздывания
пропустить через пропорциональное звено с коэффициентом
176
передачи Для получения дельта-импульса с площадью
мс(/0)ЛгЬ (с учетом инвертирования знака сигнала uc(f) перед
подачей на вход звена G(p)) задержанные на время t3^ им-
пульсы с выхода элемента ИЭ1 пропускаются через пропор-
циональное звено с коэффициентом передачи ис(4))- Этот
импульс складывается с ранее упомянутым дельта-
импульсом площадью ДвхАй и образует сигнал У].
Закон изменения импульсов с малыми высотами А/Д7),
tsucffi, формируемых на интервале Т-Iq, находим из соотношения
Ахф(0 = Ф(/ - Г0)ДХф(/0 +0),
получаемого из (3.1) при пТ = 0, АХф(0 = ||А/£(Д, Анс(Д||т,
гнд=0. Из этого матричного равенства видно, что импульс
малой высоты АнДг) может быть получен с помощью двух
формирующих звеньев, на входы которых подаются дискрет-
ные значения &ii(to+Q), ДлД^+О), а функции, описывающие
один импульс, имеют вид:
*$2(0 = *1*21(0; s3(t) = -Ф22(0
при G<t<T-t0 и S2(t)=S3(t)=Q при T-tQ<t<T. Импульс малой
высоты Miff) также получается с помощью двух формирующих
звеньев с дискретными значениями переменных Аг'Д/ц+О),
Дис<4)+0) на их входах и функциями, описывающими один
импульс:
^б(0 = Фц(0> ^7(0 = Ф1з(0
при 0<t<T-to и S6(t)=S7(t)=O при T-t0<t<T.
Импульсная модель повышающего ППН
Временные диаграммы, поясняющие работу повышаю-
щего ППН, приведены на рис.4.27. Для силовой части по-
вышающего ППН (см. рис.2.1,л) справедлива структурная
схема, представленная на рис.4.28. На интервале t0, когда
Регулирующий транзистор включен, оба ключа KI, К2
177
разомкнуты, сигналы на выходах ключей i*L = 0, ис - 0. На
следующем интервале длительностью Т~ когда транзистор
выключен, оба ключа замкнуты, сигналы на выходах ключей
i*L = iL, ис = ис. Справедливы уравнения:
'l = ОД(«вх - «с); «с = Z(p)[i*L - /,1Д)-
В импульсной мо-
дели повышающего
ППН (рис.4.29) ка-
ждый импульс
-Днс(Г), подавае-
мый на вход звена
G(p), как и в инвер-
тирующем ППН,
представляется виде
суммы двух импуль-
сов, один из кото-
рых имеет конеч-
ную высоту -uc(to) и
малую длительность
ДГо, второй — малую
высоту -Д«с(0 и ко-
нечную длитель-
ность Т-10. Анало-
гично импульс
Д/£(0> подаваемый на вход звена Z(p), представляется также
в виде суммы двух импульсов, один из которых имеет ко-
нечную высоту /£(/Ь) и малую длительность Д«о=Д^1, второй -
малую высоту и конечную длительность T-t$.
178
Закон изменения импульсов малой высоты Л/д(/)> Д«с(0,
формируемых на интервале T-t^, находится из выражения (3.1)
При п 7^=0:
ЛХф(0 = Ф(' - *о) Хф(/0 + 0) + В(г - Г0)Л¥ф(/0 + 0),
где для повышающего ППН Ауф(/) = Цам^Дг), А/н д(/)||т.
Слагаемые правой части этого выражения, зависящие от
д/д(4)+0)> А«с(/ь+О), в схеме на рис.4.29 учитываются, как и в
5з«
Рис.4.29
схеме на рис.4.26, с помощью импульсных элементов ИЭЗ,
ИЭ4, звеньев 52(/) = -Ф21(/); *$з(0=-Ф22(0, обеспечиваю-
щих формирование сигнала -Aw^z), и звеньев 56(0 = Фп(Г);
57(/) = ф12(Г), обеспечивающих формирование сигнала AiL(f).
Слагаемые, зависящие от внешних возмущений, на рис.4.29 можно
Учесть, формируя соответствующим образом сигналы и у%.
Линейные импульсные модели инвертирующего
и повышающего ППН при прерывистом токе реактора
На рис.4.30 представлены временные диаграммы, иллюст-
Рйрующие работу инвертирующего ППН при прерывистом токе
Реактора в стационарном (сплошные линии) и возмущенном
Штриховые линии) режимах. Кривые, характеризующие работу
179
устройства управления ППН, такие же, как при непрерывно^
токе реактора, поэтому на рис.4.30 они не показаны.
Отличие рис.4.30 от рис.4.24 заключается в появлении им-
пульсной составляющей в сигнале А«с(0 в момент спада д0
нуля тока реактора. Амплитуда этой составляющей равна
«cOb+/c)) длительность — А?о+АГс. Так же как и для пони-
жающего ППН при прерывистом токе реактора, площадь
указанной импульсной составляющей
«сОо+О (А<Ь+А/С) = LML(tQ+tc).
Этот импульс можно учесть введением импульсного эле-
мента ИЭ5, генерирующего дельта-импульс в конце интервала
tc спада тока, и про-
порционального зве-
на с коэффициентом
передачи -L, как по-
казано на рис.4.26
штриховыми линия-
ми. Отрицательность
коэффициента пере-
дачи отражает знак
обратной связи по
напряжению ис.
В отличие от
импульсной модели
при непрерывном
токе реактора в дан-
ном случае длитель-
ность импульсов на
выходах формирую-
щих звеньев S2(t),
S3(t), S6(t) и S7(t)
равна tc, а не T-tQ.
Аналогично получается линейная импульсная модель
повышающего ППН при прерывистом токе реактора.
180
5. СИСТЕМЫ УПРАВЛЕНИЯ ИМПУЛЬСНЫМИ ППН
С АСИНХРОННЫМИ ШИРОТНО-ИМПУЛЬСНЫМИ
МОДУЛЯТОРАМИ
Рассмотренные в предыдущей главе импульсные ППН
характеризуются тем, что их работа синхронизируется пода-
ваемым на ШИМ-2 пилообразным напряжением uv(f) опре-
деленной частоты. Существуют схемы управления без внеш-
него пилообразного сигнала, называемые асинхронными, в
которых пилообразный сигнал, вообще говоря, переменной
частоты, формируется внутри ШИМ путем приближенного,
или точного интегрирования координат ППН [19]. Иногда
пилообразный сигнал в явной форме отсутствует, но имеет
место пилообразное изменение магнитной индукции в маг-
нитопроводе трансформатора, входящего в состав магнитно-
транзисторного мультивибратора (генератора Ройера). Во
всех случаях модулируемый фронт импульса на выходе
ШИМ формируется в момент сравнения пилообразного сиг-
нала с управляющим, либо опорным сигналом.
5.1. Схемы управления с асинхронными интегральными ШИМ
и обратной связью по напряжению на обмотке реактора фильтра
ППН с асинхронным интегральным ШИМ (рис.5.1) от-
личается тем, что модулируемый фронт импульсов на входе
фильтра «ВХф формируется в момент сравнения выходного
напряжения интегратора «и с опорным напряжением t/on2. В
этот момент компаратор DA2 срабатывает, в результате чего
на его выходе появляется импульс, перебрасывающий триг-
гер в состояние 0. Одновременно в этот момент с помощью
ключа VS1 осуществляется сброс в интеграторе, выполнен-
ном на операционном усилителе DA1.
Полагая, что коэффициент усиления операционного
усилителя DA1 для дифференциального сигнала и входные
сопротивления равны оо, потенциалы инвертирующего и не-
инвертирующего входов можно считать одинаковыми и
181
равными Uonl, а сумму токов в резисторах R1 и R2 равной
току конденсатора Си:
^Др2 ^вых ~ on! _ f' d O-^onl ~ )
Rx R2 и dt
Отсюда имеем
^~=-«У1+ад,Г11, а)
at
где Ги -ChRiR2/(Ri + Л2) ~ постоянная времени интегратора;
“у1 = ^Л^вых + K2Unp2 (2)
— управляющее напряжение; Кх = R} /(/?! + R2) и
К2 = Я2/С??1 + Л2) - коэффициенты передачи;
^др2 = -^“др(^вх.ф — ~ ивых) (2)
— напряжение на вторичной обмотке дросселя L1;
АГдр = w2 /wj — коэффициент трансформации дросселя.
Работа ШИМ на базе интегратора со сбросом иллюстри-
руется временными диаграммами (рис.5.2).
182
При замыкании ключа VS1 усилитель DA1 превращается
в повторитель, поэтому после сброса напряжение на его вы-
ходе ии— С4>пг
Интегрируя уравнение (1) за время между соседними момен-
тами сброса интегратора, с учетом рис.5.2 получаем равенство
т т
Won2 - ^оги) = - К2 |«др2Л, (4)
О О
где время Тп отсчитывается от очередного л-го момента
сброса. Учитывая, что в установившемся режиме Тп=Т;
т„ тп
~ ^выхУ 1 Upsgtit = 0 ,
О О
находим среднее значение выходного напряжения ППН
Цэых + (5)
которое не зависит от медленных изменений входного напря-
жения и тока нагрузки. Это является важным преимуществом
ППН с асинхронным
интегральным ШИМ.
Возможно приме-
нение варианта схемы
ППН (рис.5.3), в кото-
ром один конец вторич-
ной обмотки дросселя
L1 заземляется, а не
присоединяется к неин-
вертирующему входу операционного усилителя DA1, как на
рис.5.1. На рис.5.3 показан ППН с двухзвенным £С-фильтром.
Тогда в случае однозвенного фильтра справедливо равенство
цдр2 ^оп! ^вых ^onl _ Q ^(^оп! ^и)
Ri R2 и dt
183
откуда имеем
~ иу1 + i^onl > (6)
где для напряжения иу1 справедливо выражение (2). Интег-
рируя (6), найдем среднее значение выходного напряжения
На практике находят применение ППН, отличающиеся от
схем на рис.5.1 и 5.3 лишь отсутствием цепи сброса [20]. Вре-
менные диаграммы для этого случая представлены на рис. 5.4.
Из уравнения (1), справедливого и в этом случае, вместо (4)
получаем
тп т„
~ ^1 JWBbix^ ~ ~
0 0
откуда для установившегося режима имеем UBba~Uoa}. Как
видно из временных диаграмм (рис.5.4), нормальная работа
такого ППН возможна при выполнении условий:
ии(л7 + /0 - 0) < 0; йп(пТ + + 0) > 0,
(8)
184
где «=0,1,2,...; Iq — длительность импульса напряжения на
входе фильтра
Схемы управления ППН
положению о необходимо-
сти строить управление на
основе полной информа-
ции о состоянии силовой
части, поскольку наряду с
выходным напряжением
контролируется еще на-
пряжение на дросселе идр2,
определяемое выражением
(рис.5.1 и 5.3) соответствуют
Рис.5.4
(2). В связи с этим появляется возможность получения высоких
качественных показателей ППН. Из-за того, что напряжение
«др2 содержит составляющую, пропорциональную напряже-
нию «вх.ф, в схеме имеется внутренний контур с высоким
быстродействием, замыкающийся через вторичную обмотку
дросселя, минуя £С-фильтр.
В зарубежных разработках ППН с асинхронным инте-
гральным ШИМ получили широкое распространение. По-
казанный на рис.5.1 вариант схемы управления положен в основу
разработки унифицированного управляющего модуля (рис.5.5),
состоящего из узла обработки аналоговых сигналов (УОАС)
Рис.5.5
185
и узла обработки дискретных сигналов (УОДС) [21]. УОДС
состоит из порогового элемента ПЭ и логического узла ЛУ, ос-
нованного на жесткой логике. Как видно, вместо триггера,
имеющегося в простейшей схеме, здесь применяется узел ЛУ,
выполняющий более сложные функции по перестройке закона
управления при изменении параметров силовой части в переход-
ных и аварийных режимах.
Предложено дополнительное усложнение схемы управ-
ления, основанной на асинхронной интегральной ШИМ, ко-
торое применяется при наличии входного ZC-фильтра ППН
[22]. Отмечено, что на резонансной частоте входного фильт-
ра возможно резкое возрастание коэффициента передачи
пульсаций со входа на выход ППН. Для устранения этого
недостатка вводится прямая связь с выхода входного фильтра
на суммирующий элемент, включенный на выходе интегратора.
5.2. Схемы управления с асинхронным интегральным ШИМ
и обратной связью по входному напряжению фильтра
Недостатком вариантов схемы ППН (рис.5.1 и 5.3) явля-
ется наличие дополнительной обмотки дросселя фильтра,
что обусловливает необходимость применения нестандарт-
ного дросселя. Возможен другой вариант схемы ППН с
асинхронным интегральным ШИМ (рис.5.6), в котором на
интегратор, собранный на операционном усилителе DA1, че-
рез разделительный конденсатор Ср подается напряжение со
входа фильтра, а не с дополнительной обмотки дросселя
фильтра. Временные диаграммы, иллюстрирующие работу
этой схемы, совпадают с представленным на рис.5.4. Обрат-
ная связь по входному напряжению £С-фильтра влияет на
ППН аналогично вводимой в управляемых выпрямителях
жесткой обратной связи по выходному напряжению [19].
Процессы в интеграторе схемы ППН (рис.5.6) описываются
уравнением
= ~^1ивых - -^г(ивх.ф - иСр )+ ^ОП1 ’ СО
186
где Тк =Си(/?1||7?2Из) ~ постоянная времени интегратора; Кх =
^2=(Ш)/(Л + ад); ^=7?3/(7?2+J{3) -
коэффициенты передачи; иср ~ напряжение на разделитель-
ном конденсаторе Ср, определяемое из уравнения
+ мСр ~ ывх.ф ~ ^опг (Ю)
Как видно, уравнение (9) вытекает из уравнения (6) при
замене илр2 на «вх.ф-нср-
Интегрируя уравнения (9), (10) за период Т, получаем при-
ращения напряжений на выходе интегратора и конденсаторе Ср:
а Т
Ли,, =
И rrt
Г к тг
[«вых^-^вх
rj-i J 15ЫЛ X Вл
ч о
г л
^+^f«c/z + <7onl ; (11)
0 7
( Т \
л«ср = - 'т + (12)
Л’Ср1 Го 1 J
В установившемся режиме из (11) и (12) имеем:
А«и = - K2yUBX + K2UCp + Гоп1)= 0; (13)
А«Ср =^fr^x ~^Ср -М=°, (14>
187
где !7ВЬ1Х и UCp — средние за период Т значения напряжений
на выходе ППН и конденсаторе Ср.
Из уравнений (13) и (14) с учетом равенства
получаем
^ср = Г^вх-^опП (15)
^ВЫХ — ^onl/^д - (16)
Согласно (16) система управления на рис.5.6 является аста-
тической и обеспечиваег идеальную стабилизацию выходного
напряжения при действии различных возмущений. Значение
опорного напряжения Соп2, подаваемого на второй вход ком-
паратора DA2, не влияет на выходное напряжение ПВЬ1Х.
Сравнивая соотношение (16) с (17), приходим к важному выво-
ду: в схеме с асинхронной системой управления на базе инте-
гратора без сброса среднее значение выходного напряжения
^вых не зависит от отклонений рабочей частоты f=\/T.
Процессы в схеме управления с приближенным интег-
рированием (рис. 5.7) описываются уравнением
Т ^- + и
" dt и
- ^1нвых + ^2(мвх.ф ~ «Ср
(17)
где справедливы ранее приведенные выражения для Тк, Къ К2-
Для упрощения учтем, что емкость Ср выбирается намного больше
Си, поэтому изменение напряжения «ср за период Т мало.
188
^акже мало изменение напряжения ивых за период. С учетом
этого напряжения «вых, wyp в уравнении (17) можно заменить
средними значениями Свых, UCp. Тогда, решая уравнение (17)
ga интервале времени, когда регулирующий транзистор
включен, получаем
и =k(0)-^i^BbIX -^2(^вх ~UC )к'/Ги +^1^вых +^2кх-Uc ),
L •“ ' ' ВЫЛ -4 \ ВЛ JJ I ЬЫЛ X \ Чл. ’-р J *
а когда транзистор выключен, —
«и = Мо) - ВДых + + ^£/вых - K2UCp ,
где «и(/Ь)=:^оп- Подставляя в первое уравнение t=t0, ик=
=ми(?о)- и решая относительно dy, где d = е~Т/Т" , находим
I dy
а из второго уравнения —
-К.и^ +K2UCp)dl-v +ВДЫХ-К2иСр .(19)
Принимая во внимание, что в установившемся режиме
ии(0)=г/и(7), из уравнений (18), (19) получаем
Гоп(1 -d) = А)С/ВЬ1Х(1 -d)-K2UCp(1 -d) + tf2tfBX(l-V). (20)
Согласно схеме (рис.5.7) имеем равенство для средних
значений напряжений
^Ср=7^х-адь.х- (21)
Подставляя в (20) выражения (21) и
иъък = (22)
и решая получающееся уравнение относительно Свх, находим
Гвх = —г-------kn(1 ~~\-----------1- (23)
189
Задаваясь значениями параметров Тк/Т , Ка/К2 , и у
по формуле (23) находим значение KRUm /Uon, затем по (22) -
относительное выходное напряжение и строим зависимости,
Аф = 0,9;
представленные
на рис.5.8. Там
же показаны
построенные по
формуле (22)
линии равных
значений у.
Слева показаны
границы облас-
ти устойчивой
работы ППН.
1 2 3 4 5 (> KpU^JU^ ца рис.5.8 при-
Рис.5.8 F н
нято
Ти/Т=1 (-); Ти/Т=2 (-); Ти/Г=4 (--)-
Как видно из рис.5.8, в схеме с приближенным интегри-
рованием (рис.5.7) имеется нестабильность выходного на-
пряжения, вызванная изменением входного напряжения, ко-
торая уменьшается с ростом Ти/Т и Кл/Кг. Статические
характеристики вход-выход ППН с интегрирующей АС-
цепью имеют отрицательный наклон. Абсолютное значение
наклона характеристик, а значит и нестабильность, умень-
шаются с увеличением отношения Свх /Свых .
Экспериментальная проверка показала, что статические ха-
рактеристики могут быть рассчитаны по формуле (23) с точ-
ностью не менее 10—20 %.
5.3. Линейные импульсные модели понижающего ППН
с асинхронным интегральным ШИМ
Линеаризация ШИМ
На рис.5.9 показаны временные диаграммы напряжений
ивх.ф и ии Д®1 стационарного режима схемы на базе интегратора
190
со сбросом (рис.5.1) (сплошные линии) и возмущенного режима
(штриховые линии), а
ДМвхф(Г) и А«и(0 от ста-
ционарных кривых. В
общем случае в качестве
второго опорного сиг-
нала Поп2 может ис-
пользоваться сигнал
обратной связи, поэто-
му будем его
переменным
Для общности
запаздывания
включении и выключе-
считать
ЦэП2(0-
учтены
при
нии регулирующего
транзистора и /з2.
При отсчете време-
также графики малых отклонений
ни от момента включения регулирующего транзистора для малых
отклонений от стационарного режима справедливо равенство
^ьх^О 5MFf7BX[A«H(/1 (з1 0)-Awon2(6_^l"0)]j (24)
где А/о — отклонение длительности импульса на входе фильтра
ивх.ф(0 от стационарного значения Zq на рассматриваемом периоде;
SM=-. (f _п< (25)
MHCV1 ^31 0)
~ крутизна модуляционной характеристики ШИМ при от-
сутствии пульсаций напряжения иоп2(0;
F1 =[1+5м«оП2а.-4!-о)Г‘ (26)
L «й.с('1 -°)]
- фактор пульсаций, введенный в общем случае для учета
Пульсаций опорного напряжения non2(Z).
При izon2(Z)=const=f/OIl2 имеем F=l.
191
Поскольку с учетом равенств (1) - (3) непосредственно пе-
ред выключением регулирующего транзистора, когда «вх.ф=Цх,
справедливо выражение
= ~+ - к^)ис - ^<7ОП1],
выражение (25) записывается в виде
2Ллр
т
1W
^4х + у п “1 ыС'(^Нз1~0)_/ь(б_^з1“0)г ~K\Uc
вх
— (27)
; .
ОП1
Напомним, что в равенства (24) —(27) входят значения
координат 4, ис, и„ и напряжения и0П2 в стационарном ре-
жиме. При приближенных расчетах можно положить
НС(*1^31^)“^вых =^фУ^вх > гт(^-*з1~0)~Лн = ^выхМ- Тогда
выражение (27) с учетом равенства K^ = R/(R+r) упрощается к
виду:
s" ----------Г (к к—Я--------------- <28)
1 + т -*з-1
ХЛДРК2
Для варианта схемы ППН с заземленным концом вто-
ричной обмотки дросселя (рис.5.3) остаются справедливыми
равенства (24) — (26), а в выражении (28) необходимо заме-
нить KiUonl на t/onl.
Равенства (24) — (26) справедливы и при отсутствии це-
пи сброса интегратора в рассмотренных схемах (рис.5.1 и
5.3). Поскольку в этом случае имеем <7ВЬ[Х = С7оп1 = K^yU^,
выражение (28) еще больше упрощается
5м“^дХх(1-7)’ <29) I
Линейная импульсная модель в случае интегратора со сбросом
Для составления линейной импульсной модели ППН
(рис.5.10) каждый импульс Аивх(/) (рис.5.9) представляется в
192
рлде суммы двух импульсов: первый импульс начинается в
^омент выключения регулирующего транзистора в стацио-
sapH°M режиме, имеет конечную высоту f/BX и малую дли-
тельность A/o==A/i; второй импульс начинается в момент
включения регулирующего транзистора в стационарном режи-
ме, имеет конечную длительность 4) и малую амплитуду
дивх(/). Этим импульсам на рис.5.10, как и на рис.4.12, соот-
ветствуют импульсные элементы ИЭ1, ИЭ2. Элемент ИЭ1 в
момент формирует дельта-импульс площадью URXAt0,
определяемой равенством (24), сдвигаемый на время t.i2 в
сторону запаздывания. Элемент ИЭ2 формирует импульс
длительностью /о и амплитудой ДиБХ(/).
Рис.5.10
Для определения сигнала Д«и(1), поступающего на вход
импульсного элемента ИЭ1, запишем уравнения, получаю-
щиеся при интегрировании равенства (1) в стационарном и
Иозмущенном режимах, начиная с момента ZH=^-^31+Д^ +0:
Ии.с(0 ~ ^Ц.с(ф) гр J[wylc(O
193
ИИ.с(О+ Д^и(*) ИИ.с(*н) +ДМи(*н) -p J[Kylc(*) + Д^у1(0 ^Onl]^-
И'к
Вычитая из второго уравнения первое, получаем
, t
huH(t) = (/„) - — JЛИу 1 (1)dt, (30)
7 И /
где согласно равенствам (2) и (3)
Дку1(О = 0^1 ~ ^2^др)Д“с(*)+ ^2^др [Дивх.ф(0“Д^(0'']- (31)
Поскольку приращение Ых предполагается малым, выбе-
рем его меньше времени запаздывания t3^ (на рис.5.9, наобо-
рот, показано Д/1>гз2). Поэтому непосредственно из рис.5.9
следует, что отклонение от стационарной кривой напряже-
ния на выходе интегратора в начале интегрирования
Д"и('Нз1+Д'1) = д«и(*1-*з1+°)--«и.с(*Нз1^)д4 = J~A*i,(32)
Дм
где «и.с(*1 -41 +0)=йис(4 -/31 -0)=-1/5м -
Согласно (24) и (32)
Дии(*1 _ 41 + 0) = -^3- = Т[дии (*i — 41 — 0) - Диопг(4 — 41 ~ О)] •
Поэтому
Д«и(4 “ 41 +0)- Д«и(4 - 41 - 0) =
= -^д«оп2('1 - *31 - о)- (1 - £)Л«И(4 - 4j - 0). (33)
Таким образом, согласно (30) и (33) сигнал
\иа(пТ + 4 -/з] -0), входящий в равенство (24), определяется
из выражения
1 z
ДЫи(/) = Дми[(л-1)71 + 4-*31+0)]-~ jA«yJ(O^, (34)
и (л-ЦТ+^-^+О
где на каждом периоде в момент nT+tx-t3i сигнал Дии(/)
изменяется скачком от значения &uK(nT + tx -t3l -0) до
194
дыи(яГ + /1-/3i+0) и обеспечивается требуемое начальное
значение.
Для обеспечения скачка сигнала Аии(0 на выходе интегра-
тора, определяемого соотношением (33), в схему импульсной
модели вводится дополнительный импульсный элемент ИЭЗ,
генерирующий дельта-импульсы одновременно с ИЭ1. На вход
ИЭЗ согласно (33) поступает сигнал F&uon2(t)+(l-F)&uH(t).
Поступающий на вход интегратора с выхода ИЭЗ дельта-
импульс площадью [ЛА«оп2(/1-/з1-0)+(1-/,)Лии(1‘1-Чз1-0)]Ти вы-
зывает изменение скачком сигнала А«и(/), соответствующее (33).
Отметим, что компаратор DA2 на рис.5.1 реагирует на
левое значение ыи(л7+А-Тз1-0), импульсный элемент ИЭЗ на
рис.5.10 — на левое значение Дми(и7’ч/1-Гз1-0). Как видно из
(33), импульсная составляющая кривой Ами(/) с амплитудой
t-oni-^оп2 и длительностью А/i (рис.5.9) при малом A/j не
влияет на начальное значение Auw(n УЧ^-Л^+О) в равенстве
(34) и на работу линейной импульсной модели, поэтому она
не учитывается в схеме модели на рис.5.10.
Импульсная модель в случае интегратора без сброса
Временные диаграммы для ППН (рис. 5.1) без цепи сброса
интегратора представ-
лены на рис.5.11. В
этом случае импульс-
ная составляющая в
Кривой Ани(/) и скачок
в момент t3l отсут-
ствуют. Имеется скачок
в момент t=tQ (как и
При наличии сброса).
Согласно рис.5.12, на
Котором показаны в
195
увеличенном масштабе участки кривых «и(1) вблизи момента
в стационарном и возмущенном режимах, имеем
Дми(^О+/^о) ~ - [Йц.с^О-О) ~ ЙИс(/о+О)]ДГо,
где, выражая производную «ис(/) из уравнения (1), можем
записать
«и.с('о~°) - «и.с^о+°) = 7-["у!Оо+°) - «у1(^0-°)]-
*и
Поскольку в составе напряжения «У](0 скачком в момент
f=?b изменяется только напряжение um$(f), с учетом (2), (3)
и (24) получим
Дии(/0 + Д/о) - Д«и('о -°) =
= - —'^UmSMF\bu„(fi - Z31 -0) - Ди^ - /з1 -0)]. (35)
Скачок, определяемый выражением (35), обеспечивается за
счет прохождения через интегратор по «быстрому» контуру
-Д«и(/о+Д4))
Рис.5.12
дельта-импульса, генерируе-
мого импульсным элементом
ИЭ1. Этот дельта-импульс
имеет площадь, равную
Дци (/[-/31-0) - А«оп2(^-/з1()),
задерживается на время t32 и
уменьшается на коэффици-
ент SMFUBXK2K]ip/Ta . В связи с этим в данном случае допол-
нительный контур с импульсным элементом ИЭЗ (рис.5.10) не
требуется. В остальном модель остается прежней (рис.5.10).
5.4. Схема управления с частотно-фазовым ШИМ
Сущность частотно-фазового управления заключается в
том, что очередное включение или выключение регулирую-
щего транзистора начинается в момент формирования им-
пульса или перепада напряжения на выходе управляемого
генератора, частота которого обычно изменяется примерно
пропорционально среднему значению сигнала обратной связи,
в результате этого регулируется сдвиг этих моментов
196
относительно тактовых моментов времени. Системы управ-
ления частотно-фазовыми широтно-импульсными модулято-
рами (ЧФШИМ) нашли применение в транзисторных пре-
образователях высокой точности, импульсных астатических
системах электропривода с дискретным управлением [24, 25].
На начальном этапе развития систем с ЧФШИМ в каче-
стве управляемых генераторов применялись магнитно-
транзисторные мультивибраторы (генераторы Ройера), кото-
рые, однако, не могут быть изготовлены по технологии по-
лупроводниковых интегральных схем. Были рассмотрены
ППН с ЧФШИМ, в которых в качестве управляемых генера-
торов применены симметричные транзисторные мультивиб-
раторы с управлением при помощи напряжения смещения
баз транзисторов, а зависимость частоты от управляющего
напряжения нелинейна [25]. Схема управляемого генератора
(преобразователя напряжение-частота) без магнитных эле-
ментов показана на рис.5.13. Основным узлом генератора
служит преобразователь напряжение-ток (ПИТ), ток на вы-
ходе которого примерно пропорционален входному напря-
жению: i = um/R„m где 7?1ПГГ — сопротивление передачи
ПНТ. При разомкнутом ключе сброса времязадающий кон-
денсатор С заряжается током i и напряжение на конденсато-
ре меняется по линейному закону
Ис; — WOCT + — t,
где w0CT — остаточное напряжение на замкнутом ключе. При
ис = бгпор компаратор генерирует импульс, который поступает
Через усилитель на выход и, кроме того, вызывает замыкание
Ключа сброса на время tc6. Здесь С/пОр — пороговое напряжение
197
срабатывания компаратора. Период пилообразного напряже-
ния, формируемого на конденсаторе С, складывается из време-
ни рабочего хода
. _ (^пор — кост)^"
₽~ . -
и времени сброса /сб, а частота при tCQ«tp
f _ ______£_________________________
tp Гсб пор ~ Г<ост)С (^пор ~~ ^ост ) ^пнт^
Преимущество рассмотренной схемы генератора состоит в
широком диапазоне почти линейного изменения частоты с изме-
нением ивх. Она может использоваться также в системах с ЧИМ.
В схеме ППН (рис.5.14,а) ЧФШИМ состоит из двух
управляемых генераторов И, Г2 и импульсного частотно-
фазового дискриминатора (ИЧФД). В установившемся ре-
жиме или переходных процессах, вызванных малыми возму-
щениями, между двумя соседними импульсами иг1 опорного
198
генератора Г1 генерируется один импульс модулируемой по
частоте последовательности «г2 и на выходе ИЧФД появля-
ется управляющий импульс им прямоугольной формы, начи-
нающийся в момент генерации импульса «г1 и оканчиваю-
щийся в момент генерации очередного импульса «г2.
При больших возмущениях возможно появление двух
специфических режимов: 1) если частота f2 модулируемой
последовательности ит2 меньше частоты Д опорной последо-
вательности, то временная задержка импульсов ит2 относи-
тельно иг1 может стать больше периода следования импуль-
сов опорной последовательности; 2) если f2>f[, то модулируе-
мая последовательность может, начиная с некоторого момента,
опережать опорную по фазе. Характер процессов при этом су-
щественно зависит от алгоритма работы ИЧФД, который фик-
сирует моменты появления этих режимов и обеспечивает огра-
ничение длительности управляющих импульсов. Отсутствие
ограничений й ухудшает динамические свойства системы при
больших возмущениях, в частности, из-за возможности пре-
вращения отрицательной обратной связи в положительную.
Когда в качестве времязадающего элемента генератора
используется интегратор, моменты t'n и t'„^ формирования
соседних импульсов на выходе ведомого генератора Г2 свя-
заны уравнением
Г(«о.с + С/Зи = д2, (36)
*и2 /
где Ги2 — постоянная времени интегратора; иос — напряже-
ние обратной связи; U3 — задающее напряжение, изменяя
которое, можно регулировать выходное напряжение ППН
при постоянной частоте; Д2 = (УПОр2-«Ост2- Определяя на-
пряжение на вторичной обмотке w2 дросселя L по формуле
(3), согласно рис.5.14,о имеем
^О.С - -^Др(йвХ.ф — Ч^) + (1 — -^Др)МВЫХ + «К > (37)
гДе ик — напряжение на выходе корректирующего звена КЗ.
199
Сведение ЧФШИМ к ШИМ-2
и асинхронному интегральному ШИМ
Считая, что опорный генератор Г1 имеет параметры Ги1,
Д1, введем безразмерные переменные [26]:
, •
51(0 = ^— krA, (38)
ГИ1Д1 /
1п
. t
#2 (0 = — [(«ох + U3)dT, (39)
Т^2 /
где tn и t'n — моменты формирования произвольного л-го
импульса на выходах П и Г2. Тогда момент tn+s формирова-
ния (л+5)-го импульса (s — любое целое число) на выходе Г1
определяется из уравнения
gi(G,+i) = s, (40)
а момент t'„+s формирования (л+$)-го импульса на выходе Г2 -
из уравнения
(41)
Обозначая
е(0 = &(0-Ы0, (42)
записываем уравнение (41)
(43)
Отсюда видно, что момент r„+J соответствует точке пе-
ресечения графика функции е(/) с прямой
gx(t)~ s = gi(f-sT) (см. рис.5.14,6). Таким образом, при
0<е(0<1 моменты окончания импульсов wM(Z) на выходе
ЧФШИМ соответствуют точкам пересечения графиков
функции и воображаемого пилообразного опорного сиг-
нала gn(f), скачки которого происходят в моменты начала
импульсов а линейно нарастающие участки образуются
смещением прямой g}(t) на целое число периодов Т. Рас-
сматриваемый ЧФШИМ сводится к импульсному элементу с
односторонней ШИМ-2, на вход которого подается сигнал e(t).
200
Согласно (38),(39) и (42) имеем
1 'г
е(6 = gi (tn) + — J(yUоп - ио с - U3) di, (44)
Ги2А2 /
1п
где gi ^п)= е (?п) ~ значение переменной gj(0 в конце /1-го импуль-
са пм(0> длительность которого tXn=t'n-tn\ в=7’и2Д2/(Т„1Д|) -
коэффициент, зависящий от параметров генераторов И, Г2 и
равный отношению частот //2 при подаче на входы гене-
раторов равных напряжений Uon = иос +U3 = const. Из ра-
венства (38) при i/on=const найдем
g(<) = ^ln/(7’B1Ai)- (45)
На рис.5.15 представлена эквивалентная структурная
схема ППН с ЧФШИМ, составленная на основе уравнений
(44) и (45), где им — прямоугольный импульс с амплитудой,
равной 1, на выходе импульсного элемента ИЭ,
Fx(p) _ 1 - ^лр +^/к(й); ^к(й) — передаточная функция
корректирующего звена КЗ.
ЧФШИМ
В установившемся режиме /1=Л, среднее значение по-
дынтегрального выражения в (44) равно нулю:
^оп-^о.с.ср-^з =0-
Отсюда с учетом (37) имеем
vUon -из ~ (уСЕХ - lLr) + (1 - ^лв)t7„IX + Ккивых = 0,
он з др XI Вл L, / \ др 7 выл К оЫл 7
201
где yUBX -1Lr = UBbIX ; Кк = И^(0) — коэффициент усиления
корректирующего звена на частоте со=0. Следовательно,
^ио„-и3
1 + /Гк ’
(46)
Согласно (46) статическая ошибка стабилизации выход-
ного напряжения
Д£^вых
1 + Лк
—1[гЛСоп-дС3-
1 + лк
X
(47)
где Л/) и А/2 - изменения частот опорного и ведомого гене-
раторов, рассматриваемых независимо друг от друга, при
/70П = 67Ос +U3 = const, вызванные всеми факторами, влияю-
щими на их параметры. При указанных условиях
v~f\lfi, fi ~ fi- Как видно из равенства (47), статическая
ошибка увеличивается с ростом разности уходов частот генерато-
ров Л/] и Дй- Дтя обеспечения высокой точности стабилизации
выходного напряжения ППН генераторы П, Г2 целесообразно
выполнять по одинаковой схеме с одинаковыми параметрами.
Обозначив uu-g2(t)^2^ можем переписать уравнение
(39) в виде
^2-> = «o.c+^, (48)
at
аналогичном (1). Роль сигнала uK(f) играет, например, на-
пряжение на конденсаторе схемы генератора (рис.5.13), при-
чем сброс происходит при uK—Ump2. Интегрирование уравне-
ния (48) приводит к (36), откуда для установившегося режима,
в котором t^+l -1'„ - Т, с учетом (37) находим выражение
<49>
аналогичное (4)
Поскольку Та2&2 = vT^^i и согласно (38) ^и1д1 -иопт,
то выражение (49) совпадает с (46).
202
Таким образом, в случае, когда в качестве времязадающего
зчемента генераторов Г1, Г2 используется интегратор, ППН с
уфЩИМ (рис.5.14,а) сводится к ППН с асинхронным инте-
фальным ШИМ и генератором тактовых импульсов и,., выпол-
ненным также на базе интегратора. Если генератор тактовых
импульсов в схеме с асинхронным интегральным ШИМ
(рис.5.1) выполнен иначе, то согласно (4) даже в случае иде-
альной по стабильности (7=const) остается статическая ошиб-
ка, обусловленная нестабильностью постоянной времени Тк
ведомого генератора и опорных напряжений 77Оп1, Uon2-
Сведение асинхронного интегрального ШИМ к ШИМ-2
Полагая, что в схеме ППН с асинхронным интеграль-
ным ШИМ (рис.5.1) моменты tn и rn+J формирования сосед-
них тактовых импульсов связаны уравнением
J (п+1
кпЛ = А1> (50)
повторяя приведенные для ЧФШИМ рассуждения, для этой схемы
можно получить эквивалентную структурную схему (рис.5.16). Введе-
ны обозначения: А2=^оп1-[/опЛ=7^е=&-£2> где &=-Ц,/Д2-
Модулируемый фронт импульса с единичной амплитудой на
Рис.5.16
Выходе ШИМ-2 формируется в момент сравнения пилообразного
сигнала единичной амплитуды gn(f) и управляющего сигнала
е(0 = ^ +(51)
7 Д2
203
т.е. момент окончания импульса им на выходе ШИМ опре-
деляется из уравнения (4.32) при замене ну(/) на е(/) и Uv~\
После линеаризации аналогично (4.44) получаем
Д'1 =5^Ae(/j-O), (52)
где S'M = Т, а фактор пульсаций
F = [1 - Ж-О)]-’ = JpnJ (53)
Для этой же схемы (рис.5.1) при отсутствии сброса в ин-
теграторе сведение к ШИМ-2 осуществляется непосредст-
венно на основании временных диаграмм, иллюстрирующих
работу схемы (см. рис.5.4). Тогда получается эквивалентная
структурная схема (рис.5.17), где в ШИМ-2 происходит
сравнение выходного напряжения интегратора ии с опорным
напряжением £7ОП2-
Рис.5.17
Если в общем случае предположить, что на суммирую-
щее звено на входе ШИМ-2 подается дополнительный пило-
образный сигнал с амплитудой <7П, то схема на рис.5.17
представляет собой предельный случай при Дп->0. В уравне-
ние (4.32) для определения вместо uy(t) нужно подставить
«и(/) - <7оп2. После линеаризации ШИМ-2 получим соотно-
шение, аналогичное (4.44),
= , (54)
где ми(/1-0) < 0. Отсюда видно, что введение дополнитель-
ного пилообразного сигнала при ип(^)>0 уменьшает, при
«n(Zj)<0 увеличивает коэффициент передачи ШИМ-2,
204
а в случае < пи(Г]-О) вызывает изменение знака этого
коэффициента. Рис.5.17 соответствует йп(^) = 0 и
^иАци(*1~0)
ау101)_^1^Гоп1
(55)
Выражение (52) при учете (51) и (53) совпадает с (55). Од-
нако при одинаковых параметрах в схеме со сбросом в интегра-
торе согласно (4) устанавливается большее выходное напря-
жение, чем в схеме без сброса. Значение Wyi(Z'i) в схеме со
сбросом также оказывается больше, а коэффициент передачи
ШИМ-2 меньше, чем в схеме без сброса.
5.5. Цифровые системы управления импульсными ППН
Включение микропроцессоров в основные контуры
управления высокочастотными ППН затруднительно из-за
малого времени, отводимого один раз за период Т для про-
ведения необходимых вычислений. Значительно проще мож-
но построить цифровую систему управления при использо-
вании асинхронной ШИМ.
На рис.5.18 показана структура цифровой системы
управления ППН, которая состоит из преобразователя на-
пряжение-частота (ПНЧ), двоичного счетчика (ДС), цифрового
компаратора (ЦК), триггера, генератора тактовых импульсов
(ГТИ) и узла ограничения длительности импульсов управле-
ния регулирующим транзистором (УОДИ). В качестве ПНЧ
205
был использован генератор типа К531ГГ1, у которого при
изменении напряжения иос от 1,6 до 5 В частота изменялась
от 0 до 2 МГц. Восьмиразрядный двоичный счетчик ДС соб-
ран на двух микросхемах К155ИЕ7 [27]. В цифровом компа-
раторе ЦК, собранном на двух микросхемах К155СП1, про-
исходит сравнение двоичного кода, поступающего с выхода
ДС, и опорного кода Uon, задаваемых с помощью переклю-
чателей. На выходе ГТИ формируется положительное на-
пряжение, уменьшающееся до нуля на короткое время перед
тактовыми моментами времени (рис.5.19,а).
В тактовые моменты времени, определяемые положи-
тельными перепадами напряжения на выходе ГТИ, триггер
устанавливается в состояние 1, вследствие чего включается
регулирующий транзистор ППН. В момент, когда нарастаю-
щее двоичное число на выходе счетчика ДС становится больше
двоичного числа Соп, на выходе ЦК появляется положитель-
ный перепад напряжения, вызывающий переброс триггера в
состояние 0 и выключение регулирующего транзистора. Одно-
временно счетчик ДС импульсом ис5 сбрасывается в нуль, а
на выходе ЦК появляется низкий уровень напряжения. Та-
ким образом, на выходе компаратора формируется короткий
положительный импульс сброса. После сброса процесс счета
импульсов в счетчике ДС возобновляется.
Рис.5.19
Если за период Т следования тактовых импульсов со-
держимое счетчика не нарастает до Гоп (рис.5.19,6), то им-
пульс сброса на выходе дискретного компаратора ЦК не
206
формируется, триггер остается в состоянии 1. Но в течение
короткого интервала, когда на выходе генератора ГТИ под-
держивается напряжение низкого уровня, на входе логиче-
ского элемента DD2 также появляется логический нуль, а на
выходе узла УОДИ — сигнал псб сброса счетчика ДС. В слу-
чае отсутствия принудительного сброса в этом случае счет-
чик и триггер сбрасывались бы через промежутки времени,
превышающие период 7, переключения регулирующего
транзистора не синхронизировались бы тактовыми импуль-
сами, что ухудшает динамические свойства ППН.
Цифровая астатическая система управления ППН
Широкое применение цифровых систем управления
(ЦСУ) во многих отраслях техники обусловлено рядом при-
чин, в частности требованиями высокой статической точно-
сти, стабильности параметров, гибкости, оптимизации и
адаптации к изменяющимся условиям работы. Вместе с тем
в импульсных ППН с высокими рабочими частотами ЦСУ
пока не нашли применения.
Рассмотрим простую астатическую систему управления,
которая не требует больших аппаратных затрат для реализа-
ции в цифровом виде [28]. Ее структурная схема, приведен-
ная на рис.5.20,п, содержит интегратор И, компаратор К,
формирователь кода опорного напряжения ФК, RS-триггер,
генератор тактовых импульсов ГТИ.
Принцип действия системы иллюстрируют временные
диаграммы (рис.5.20,6). Регулирующий транзистор открывается
207
на время (цп в моменты t=nTподачи тактовых импульсов с
выхода ГТИ на вход S триггера и одновременно сбрасывает-
ся интегратор. Транзистор закрывается, когда напряжение на
выходе интегратора станет равным опорному напряжению
ыоп(л), подаваемому с выхода ФК. В тактовые моменты вре-
мени и Г-0, и=1,2,..., непосредственно перед сбросом инте-
гратора, опорное напряжение изменяет свое значение в со-
ответствии с равенством
«оп («) = «оп (« - О + К [t73 - ик (и~0)], (56)
где U3, ыи(л-0) — соответственно задающее напряжение и
напряжение на выходе интегратора в момент времени пТ-0,
1/оп(и-1) - опорное напряжение, установленное в момент
(и- 1)7-0, К — коэффициент, выбираемый исходя из требова-
ний к динамике ППН. Согласно (56) в установившемся ре-
жиме ыоп(л) = иоп(п-1) = const, «И(и-О) = U3 при любом п.
Напряжение ии(и-0) в (56) определяется равенством
1 пТ
= \(KRuc + R^iL)dt, (57)
и (и-1)Т
где принимается ми(л+0)= 0.
Учитывая, что в установившемся режиме средние значе-
ния связаны равенствами IL=IH= UBia /R, Uc cp = IZBbIX, из
(57) имеем
ми(П~°) = + -Tri t/вых -
‘1 ' f rrt I д D I вых
k K )
Поскольку в установившемся режиме ик(п-0) = U3, оконча-
тельно получим
т U
T{Ka + Rm/RY (ЭЬ)
где при использовании только обратной связи по выходному
напряжению следует принять 7?дт=0. Как видно из (58), на-
пряжение J4bK не зависит от входного напряжения ППН,
но через сопротивления R зависит от тока нагрузки.
Зависимость 67вьгх от сопротивления нагрузки R может быть
208
устранена введением обратной связи только по переменной
составляющей тока дросселя.
Линейная импульсная модель
Для построения импульсной динамической модели без уче-
та квантования по уровню рассмотрим возмущенный режим
работы ППН (штриховые линии
на рис.5.21), мало отличающий-
ся от стационарного режима
(сплошные линии на рис.5.21).
Непосредственно на основании
временных диаграмм для малых
отклонений Д/Ол можем записать
равенство:
~ ^и.с (?0 )Д = AZZ„ (А) ) — Azzon (^0 ’
где Д«оп(л) = «оп(л)-/7опс - от-
клонение напряжения zzon(z) от стационарной кривой на л-м пе-
риоде; Д/о„ =/0„ -<0 ; Аыи(/0)=иив(^)-им(/0) i ыи.в(0 и zzKC(/) -
напряжения на интеграторе в возмущенном и стационарном ре-
жимах. Отсюда
A tOn = ~S[AuK (Zo) - Azzon (и)], (59)
где 5 - l/zzH C(/0) — крутизна модуляционной характеристи-
ки ШИМ.
Решение разностного уравнения (56) для произвольного
п имеет вид:
«ortOO = «оп(0) + - «и(/-0)]. (60)
Z=1
С учетом (60), полагая лоп(0)~UOTI с, получим
п
Д«сп(я) = иоп(л)-Допс =-^£[zz„(z-O)-i73]. (61)
i=l
Поскольку в стационарном режиме ил с (z-0) = U3, можем
записать
1 iT
AzzH(z-O) - <73 = Дли(г’-0) = — |Azzoc(r)zft , (62)
и (Z-l)T’
209
где uoc(f) = KRuc(t) + 7?ДТ1Х(/). Тогда из (61) найдем
” к
Дыоп(л) = -Л^Д«и0'-0) = - — JAKocWA. (63)
1=1 7 и 0
Учитывая, что текущее значение выходного напряжения
интегратора на п-м периоде определяется выражением
. пТ+1
&ии(0 = ^ [а«ос(ОЛ,
Ги „Т
величину Дми(/0), входящую в выражение (59), можем запи-
сать в виде
, лТ+*Ь л7+/0 . пТ
А«и(7о)=^г |амос(0Л=— рЩос(/)Л-— (64)
7и пТ 7и 0 7и о
Из (59) с учетом (63) и (64) получим
иТ+#о
/Л«ос(0^-
О
пТ пТ
|диос(Г)Л+— .(65)
3 7и о
А^ол--^
Т -
и о
При составлении схемы замещения для малых отклоне-
ний переменных от стационарных кривых (рис.5.22) импуль-
сы АиЮф(0 длительности ДГОл и амплитуды UBK заменяются
дельта-импульсами площади £/вхд/0„, генерируемыми им-
пульсным элементом ИЭ в момент времени пТ+ t0.
Для формирования суммы в квадратных скобках формулы
(65) введен интегратор с передаточной функцией 1 /(Тк р) .
210
Первое слагаемое этой суммы формируется благодаря про-
хождению выходного сигнала интегратора
, t
= [д«ос(0Л
и о
через нижний сумматор и фиксации его значения в момент
nT + t0 импульсным элементом ИЭ, второе слагаемое — за
счет прохождения этого сигнала через звено чистого запаз-
дывания на время t0 и фиксации задержанного сигнала
дли(/-/0) этим же импульсным элементом. Третье слагаемое
отличается от второго знаком и множителем К и формирует-
ся аналогично.
Схемотехническая реализация рассмотренной системы,
представленная на рис.5.23,о, содержит: преобразователь на-
пряжение-частота (ПНЧ) и счетчик СТ1, образующие циф-
ровой интегратор (ЦИ); счетчик СТ2, делитель частоты (ДЧ).
1 - £=0,5 t
2 - £=0,25
В схеме отсутствует компаратор, его функции реализованы
следующим образом: в тактовые моменты времени (л-1)7’-0 в
СТ1 загружается опорный код, который под действием вы-
ходных импульсов ПНЧ, поступающих на вычитающий вход
счетчика, декрементируется; при переходе содержимого СТ1
через нуль возникает импульс переполнения, сбрасывающий
триггер. Для вычисления кода опорного напряжения в соот-
ветствии с уравнением (56) используется счетчик СТ2.
211
В тактовые моменты времени (л-1)7’+0 производится загруз,
ка в счетчик задающего кода, эквивалентного произведению
KU3 в (56). До момента сброса триггера выходной сигнал
ПНЧ поступает на суммирующий вход СТ2 и увеличивает
его содержимое. К моменту сброса триггера содержимое
счетчика определяется суммой моп(л-1) + KU3, что соответ-
ствует суммированию в правой части (56). Одновременно в
течение периода через делитель частоты ДЧ на вычитающий
вход счетчика поступает последовательность импульсов с
частотой Kfnm, что эквивалентно вычитанию Кик(п-О) из
указанной суммы. Таким образом, к следующему тактовому
моменту времени на выходе счетчика СТ2 сформируется но-
вое значение опорного кода иоп(л).
Описанная система управления была испытана в ППН с
дополнительной ОС по току дросселя и показала устойчивую
работу, причем длительность переходных процессов не пре-
вышала пятидесяти периодов тактовой частоты во всех ре-
жимах работы ППН (рис.5.23,б).
Преобразователь напряжение-частота
В связи с тем, что значительное влияние на качество
системы управления оказывает ПНЧ, подробнее остановим-
ся на его работе.
Максимальная частота выходного сигнала ПНЧ может
быть выбрана из соотношения fmax< (2'”—1)/, где /= 1/Т -
рабочая частота ППН, m — число разрядов счетчика. Так, на-
пример, если используется 8-разрядный счетчик и f=10 кГц,
находим Aiax—2,55 МГц. Следует отметить, что отечественная
промышленность выпускает крайне ограниченную номенк-
латуру микросхем ПНЧ, которые не могут быть использова-
ны в системах управления ППН либо из-за недостаточного
быстродействия (прецизионный АЦП К1108ПП1 имеет
/п1ах=500 кГц), либо из-за недостаточно широкого диапазона
выходных частот при изменении управляющего напряжения
(К531ГГ1). По аналогичным причинам не могут быть
212
использованы и зарубежные АЦП. Так, например, в большом
семействе АЦП фирмы ANALOG DEVICES всего пять микро-
схем ПНЧ, частотный диапазон которых ограничен частотой
2 МГц, что не позволяет использовать эти микросхемы в со-
временных ППН. Поэтому для испытания ЦСУ был разработан
ПНЧ (рис.5.24,а), обеспечивающий изменение частоты выход-
ного сигнала на 30 дБ (4пах=4МГц) при изменении входного
напряжения от 0,6 до 4 В. За основу взята схема генератора на
двух одновибраторах ИС К.1533АГЗ, в которых вместо времяза-
дающих резисторов используется генератор тока, управляемый
напряжением, на транзисторе VT1. Использование токового
зеркала на согласованных транзисторах VT2.1 — VT2.5 позволи-
ло устранить влияние нестабильности питающего напряжения
на частоту генерации. Наличие двух противофазных выходов и
входа запрета генерации облегчает сопряжение ПНЧ с цифро-
выми системами. На рис.5.24,б представлены временные диа-
граммы в характерных точках ПНЧ.
Уравнение, описывающее изменение напряжения на
времязадающем конденсаторе С2 в интервале формирования
выходного импульса, имеет вид
t
иС2 ~ МС2(^-1) + 77/ „ , J(woc - Uпор) dt,
С\Аэ + Гэ) I
213
где «сг(4-1) ~ значение напряжения «сг в момент tiA, —
сопротивление резистора в цепи эмиттера VT1; t/nop~0,6 В -
пороговое напряжение, соответствующее линейной аппрок-
симации вольтамперной характеристики эмиттерного пере-
хода VT1; гэ — дифференциальное сопротивление линеариза-
ции. В момент когда напряжение uq2 достигает порого-
вого значения «с2(4-1)+л^С2> происходит быстрый разряд
конденсатора до начального значения. Поэтому
] z' 1
AtZC2 = «С2(4-1) - «Сг(4-1) - ~Г{п --Г [(«ос ~ пор)Л• (66)
СТЛэ + гэ) t J
Аналогично для напряжения на конденсаторе С1
At^Cl = «С1(4) “ мС1(4-1) = 77Б----\ [(«ос ~^пор)Л. (67)
t-АЛэ +гэ) /
6-1
Суммируя равенства (66) и (67), получаем
I f/
А<7С1 +AUC2= [(«ос - Uuop)dt, (68)
С(АЭ + Гэ) >
где интеграл в правой части пропорционален заштрихован-
ной на рис.5.24,б площади. Для определения явного выраже-
ния для частоты генератора ПНЧ воспользуемся приближен-
ным методом определения интеграла
J («ос -Unop)dt =
«ос (4) + «ОС (4-1)
2
4гПор (4 - 4-1) j
с учетом которого из (68) найдем
Л-1
1 _ п Г «ос (4) + «ос (4-1)
4 - 4-1 L 2
^иор
(69)
где а = [(At/Ci + Д<7С2)С(АЭ + гэ)] 1 . В установившемся ре-
жиме из (69) следует
214
f ~ У- (uQC t^nop )
(70)
Зависимость, построенная по уравнению (70), представлена
на рис. 5.24,<? штриховой линией. Там же приведена экспе-
риментальная зависимость (сплошная линия).
В рассматриваемой схеме управления ППН (рис.5.23,о)
импульсы с выхода ПНЧ подаются на счетчик СТ1. В соответ-
ствии с временными диаграммами на рис. 5.24,5 и уравнением
(15) можем записать равенства
Uqc 02 ) ^ос (А ) _ тт
7 и пор
(Z2 ~ ti),
иос(^/7+Moc(0-l/ Г г (t
—------------------и пор V/
*7-1) -
Суммируя эти уравнения, в левой части получаем число /,
записанное в счетчике в момент г):
/ = а £|Чс&)_ t/1 (z. _
i=l L
В реальных системах u^t-) »woc(*/-i) и разность t, - fa я dt,
поэтому приближенно имеем
4
7 — ct J' (ttoc — VIrop }dt,
zo
(71)
что позволяет установить соответствие между параметрами
аналогового и цифрового интеграторов. Учет квантования по
Уровню при моделировании процессов в системе на ЭВМ
осуществляется округлением результата, полученного по
формуле (71), до целочисленного значения.
215
6. ИССЛЕДОВАНИЕ И РАСЧЕТ ИМПУЛЬСНЫХ ППН
МЕТОДОМ Z-ПРЕОБРАЗОВАНИЯ
При решении многих задач анализа и синтеза импульсных
ППН целесообразно применение линейных импульсных моде-
лей, поскольку они позволяют просто учитывать изменение
схемы линейной части, использовать ряд хорошо разработан-
ных методов теории линейных импульсных систем, например,
метод псевдочастотных характеристик, метод структурных пре-
образований. Применение линейных импульсных моделей су-
щественно затрудняется в тех случаях, когда они содержат не-
сколько синхронно, но несинфазно работающих импульсных
элементов. Теория подобных систем сложна и продолжает раз-
рабатываться рядом авторов [29, 30].
6.1. Преобразование импульсной модели
и определение фактора пульсаций для понижающего ППН
При нахождении точной формулы для расчета фактора
пульсаций F учтем, что в стационарном режиме, когда
Дб^л=Дивх=0, Д/н д=0, на вход фильтра (см. рис.4.9) подаются
импульсы постоянной дли-
тельности /q и высоты J7Bx
(рис.6.1). Поэтому для опреде-
ления значений производных
duc )dt, diL /dt, входящих в вы-
ражение для фактора пульса-
ций (4.45), воспользуемся разомкнутой импульсной системой
(рис.6.2,д), где ИЭ — идеальный импульсный элемент, гене-
рирующий дельта-импульсы в моменты включений регули-
рующего транзистора; Жфз(р) = (l-e~p,°)/p - передаточная
функция звена, формирующего прямоугольный импульс
длительности to, начинающийся в момент подачи на его вход
дельта-импульса;
^Ф(Р) =
^[(Р + а)2 +®о]
(1)
216
— передаточная функция ZC-фильтра, определяемая выра-
жением (4.53);
. ^ф(Р) P + ~RC .
1(л>= ад =ф+а)2+С02]’
<?(») =-— ; Z(p)~—--.
W Lp + r RCp + Y
(2)
(3)
Разветвляющаяся часть этой системы соответствует
уравнениям (1.1), записанным в операторной форме,
'£ /<2(р) + ис= ивх ф ; ис /Z(p) - iL = -zH д , (4)
откуда с учетом выражений (4.52) имеем:
тгz / \ 7 I X ' 7 ( X
“с = ; Zi(p) = * .
Без учета влияния дополнительного тока нагрузки г„ д на
фактор пульсаций с использованием методов преобразования
структурных схем схема на рис.6.2, а упрощается (см.
рис.6.2,б).
Обозначив модифицированное (смещенное)
Z-преобразование производной duc/dt через 6?вых(г,£), в со-
ответствии с рис.6.2,б можем записать [31, 32]
= ZE{w^p) - е-"°Жф(р)}= 1Гф(г,£) - w^) ,(5)
вх \Z)
217
где с использованием таблиц ^-преобразований [31] найдем
и/ , ч 7/и// ч! ^zJE[zsinEo07, + Jsin(l-E)©07’]
Иф U, в) = Ze (р) ) = -----
;(6)
®о7ф (z2 - 2zdcos а0Т + d2)
d = e~aT.
Известно, что для передаточной функции W(p)
z-1 lF(z,l + е - у) при 0 < е < у,
fF(z,s-y) приу<Е<1,
Ze[e~p,°lF(p)j=
(7)
Е, С
(8)
где y=tG/T.
Поэтому для 0 < е < у, подставляя в (6) 1+е-у вместо
учетом (7) получаем
W^(z,^ = Zc{e^W^p)} =
Kfydl+E~y [z sin(l + e - y)o07’ + d sin(y - e)(ooT ]
соо7ф (z2 - 2zdcos cooT + d2 )
При определении фактора пульсаций F нас интересуют
значения производных duc/dt и diL/dt в момент tx пересе-
чения пилообразного сигнала un(t) с управляющим uy(f) (см.
рис.4.11), а при отсчете времени от момента включения ре-
гулирующего транзистора — в момент yj Г (см. рис.6.1), где
г, -
Подставляя выражения (6), (8) в равенство (5), при e=yi
находим
(9)
I.;./-"'7' (to)
+ dsin(l-y1)coo7’]-d1+Tl ^[zsinQ+yj — у)соо7’+Jsin(y-y1)<oo7’]|,
где y-yi = уз2 -t31/T.
Поскольку при определении фактора пульсаций на вход
импульсного элемента ИЭ (рис.6.2,0 подается -постоянное
напряжение £/вх, в равенство (10) подставляем
218
(11)
z-i
Тогда по теореме о конечном значении решетчатой функции
[31] имеем
Ис(Т1Л = =
z^l Z
=----у?—-е^----------„-т {</Y1 [sin у^0Т + d sin(l - Y] )a>07’]-
соо7ф(1-2*7 cos a0T + J2)
-t/'+n-TfsinQ + Y] -y)a0T + Jshi(y-Yi)“o^]}- (12)
Аналогично, обозначив модифицированное z-преобра-
зованис производной diL/dt через /£(?,е), согласно
рис.6.2,б запишем
= ZE{GSP) - e-₽'°G1(p)}= G, (z,e) - GlT(z,E), (13)
Uex \Z)
где по таблицам ^-преобразований имеем
”dc
G](z,e) = —7— ----------------JzcosecoqT -dcos(l-E)co0T +
£(z2 - 2zdcoscoqT1 + d2)
+ — I — - a |[^sin ecoo7’ + Jsin(l - e)cooT][ . (14)
coo < RC j J
Подставляя в (14) l+e-y вместо e, с учетом (7) для 0<e<y
получаем
GI,U,E) = ZE^G1(p))=
j!+e-y
= —r~------------—-x Ucos (1 + E - y)a0T - d cos (y - е)ы0Г +
L\£2 -2zdcosa0T + d2J
+ — - aVzsin(l + e - Y)to07’ + ^sin(y- е)о0Г][ . (15)
co0 \RC ) J
Подставляя выражения (14), (15) в равенство (13), при
Е ~ Yi с учетом (11) находим:
219
h(z,b) = UBX "777 2 -n ~ 1----~~-J^kcosYjfiJoT-
Z - 1 l(z2 - 2zdcosco0T + d2)
- dcos(l - уj ХооГ]+—f - a\dy‘[z sin у +dsin (1 - yt) w07^
(Oq \jVVz J
- £?,+yi~y[zcos(l + yt - y)cooT - Jcos(y - у,)coo7’] -
- aL1+T1*y[zsm(l + yj - y)cooT + Jsin(y - уi)o0T]|.
<a0\jKC J J
В установившемся режиме
= lim ~/£(z,yi) =
at г=У1т z->i z
—r------------------JcT1 [cos y^T - Jcos(l - У1)<00Г] +
Д1 - 2dcosa)0T + dl)
+ “ aV1'1[sinyi(0o7’ + Jsin(l - y1)ioo7’]-
C0() yAC J
- d1+71-y[cos(l + y1 -y)e>07’ - Jcos(y - У])и0Т]-
~f^~aV1+?ri_1r[sin(1+Yi-y)®o7’ + c?sin(y-yi)coo7l| - (16)
Теперь аналогично (4.49) можем найти общий коэффи-
циент усиления ШИМ-2 HM=SMF:
= у-р = "п(Г1П - »у(У1О =
= «„(т,П +
Лф at t=yiT
diL
di t=yxr
(17)
где
D
Ka = КфКаКгК2 ; К. = КфК. . (18)
Лб
Подставляя (12), (16) в (17), с учетом равенства Тф -КфЬС
получаем
1
Ям
. , ™ KTHf,CUBX
=«n(Yi^ + -L^T-
7ф
соцС'Адд.
1 t 1 А
+ ©QUc “J
^Ь(19)
220
где
А = ~1 Icos yi“°r _ dcos (I _ yi) “о7" 1_
1 - 2d cos (о0Т + а
-</1+T1"T[cos(l + Y] -y)co0T-Jcos(Y-y1)co07’]};
Di =—~—1 ~ 2 {^‘[sinyieooT + rfsina-YOtOoy]-
1 - 2d cos m0Г + d
-j’+n-Y^ma+Y! + Y/sin(Y-Yi)®oH}-
Преобразование линейной импульсной модели
Используя известные правила преобразования линейной
непрерывной части, преобразуем схему на рис.4.13 к одно-
контурному виду. Для этого структурная схема АС-фильтра
(рис.6.3,а) последовательно преобразуется к видам, изображен-
ным на рис.6.3.5, в, и г: 1) точка суммирования сигнала -А/Н.д
на рис.6.3,а переносится через точку разветвления против
направления прохождения сигнала, в результате получается
схема на рис.6.3,5; 2) точка суммирования сигнала -Д/Нд на
рис.6.3,5 переносится через звено С(р) против направления
прохождения сигнала и после изменения порядка включения
сумматоров в ветви получается схема на рис.6.3,в; 3) точка
съема сигнала Дф+Дфд на рис.6.3,в переносится через звено
Z(p) по направлению прохождения сигнала и получается
схема на рис.6.3,г [33]. Из схемы на рис.6.3,г имеем равенство
+ М (21)
I z(p) Н.Д, \ )
которое непосредственно следует и из второго уравнения (4).
Из этой схемы следует также равенство
Ли - - &Uc
^~С{ру-^(рУ
Которое получается и из уравнений (4) с учетом (4.53).
221
Из равенства
Auy = KxK2AUoxl - КрКхК2&ис - K^R^Aij , (22)
получающегося из (4.33), с учетом (21) находим
Дыу = KxK2RUon - KxR^MnJi - JVoc(p)Ruc, (23)
где с учетом выражения (4.52) передаточная функция цепи
обратной связи
К R ( R \
= КЛКХК2 + -A-f = zd+ КЛК2 (7О.СР + 1);(24)
Z(p) (Л j
222
Принимая во внимание схему на рис.6.3,г и равенство
(23), преобразуем исходную импульсную модель понижаю-
щего ППН (рис.4.13) к виду, показанному на рис.6.4. Здесь
дополнительно предполагается, что изменения сигнала
д«вх(/) за период Т малы, в связи с чем импульсный элемент
ИЭ2 с АИМ-2 представляется в виде последовательного со-
единения идеального импульсного элемента, генерирующего
дельта-импульсы в моменты включения регулирующего
транзистора, и формирующего звена с передаточной функ-
цией (р) = (1 - е~р,°)/р.
Рис.6.4
Преобразуем выражение в квадратных скобках правой
части равенства (19) с учетом (25):
как2 , 1
( 1 А
------ct
Глс )
1 Г—
\^о.с
1
СОо^
где
7 Т (. R Кк
----= а . 1 +-----—
Тос
(26)
учтем, что
к^си^ кт^сивх и5 1 Т
7ф КФЬС Т Кф q^JbC’
где = ^L/C/R^. Поскольку согласно (4.44) 5М = l/izn(yj7"),
равенство (19) принимает вид
1
* = 1 _ 1 . Т Гл 1 f 1_
Ям S(,.F SM T^VZcL1 " I 2 >( )
®(J к^о.С
223
откуда
^6 ^ТУ1 7 D
Т -JlC
(28)
4=i+sM
р м
Интересно сравнить выражение (27) с ранее полученной
приближенной формулой (4.49). Для этого положим в выра-
жении (27) а 7=0 и перейдем к пределу при о>о7->0:
Л=1-у; lim. —^ = -(1-y)(2yi -у). (29)
>0 «дТ->0 Сйп/ 2
аТ=0 аГ=0
При = T/Un ; Кф = 1 и подстановке выражений (29) с уче-
том (26) из равенства (27) получаем:
1 Т
Ны Т Т q6
+ [ У] --
in 2
-7= Vi
4lc 1
г-
----+ ЛН
<?б
,(30)
где q = ^LICjR.
Выражение (30) при q=q§ и КТ«КН совпадает с (4.49).
На рис. 6.5 представлены рассчитанные по формуле (28) за-
висимости фактора
пульсаций от
-JLC /Т при 7г=0;
41=42=0; ?б=7, vt=l;
Qo=<*>; 7=0,1 (-);
0о=1О, <7=1,9 (-) И
границы области ус-
тойчивости ППН
(- • -). Наблюдается
сильная зависимость
F от коэффициента
усиления Ко и пара-
метра -JLC/Т. При 0о=оо изменение коэффициента нагрузки
q = ^LjC/R в широких пределах от 0,1 до 1,9 мало влияет на
F и лишь при Go*'Ю это вызывает заметное уменьшение F.
224
Схема с отрицательной обратной связью
по току конденсатора ZC-фильтра
Если в схеме импульсного ППН (рис.4.9) включить дат-
чик тока ДТ последовательно с конденсатором фильтра, то
формула (4.33) принимает вид:
«у = Кх К2 (Uo„ - Каис) - К. R^ic, (31)
где сопротивление полагаем настолько малым, что оно
не влияет на процессы в £С-фильтре. Подставив в (31)
(32)
к
получим
( R У
иу = КхК2иои-КхК2 Кл «с-K^L + ^Лдт/ад.(33)
к
Сравнивая формулы (33) и (4.33), видим, что для схемы
с отрицательной обратной связью по току конденсатора
фильтра справедлива импульсная модель, показанная на
рис.6.6. Она отличается от модели для ППН с обратной связью
по току реактора (рис.4.13) тем, что на звено Rw подается
сигнал Дг1(/)-/нд, а коэффициент передачи делителя Ка за-
меняется на KR- Rrt/(K2R) • После преобразований, ана-
логичных приведенным на рис.6.3, получаем одноконтурную
225
структурную схему (рис.6.7). Она имеет следующие отличия
от рис.6.4: 1) сигнал А'17?дтД/нд подается на вход с положи-
тельным знаком; 2) передаточная функция цепи обратной
связи И4>с(р) заменяется на
t + К2 (О + 1) - (34)
где
Рис.6.7
В данном случае соотношение для определения общего ко-
эффициента усиления ШИМ (19) также должно быть изменено
подстановкой Кл - R^/^K^R) вместо Кд. Тогда выражение в
квадратных скобках правой части (19) принимает вид:
Z- -^tr
1
^qCRkt mo
j м
“О Vo.c
Следовательно, справедливо выражение, получающееся
из (27) при подстановке Т'о с вместо То с:
1 = 1 1 । <7б JrTv, Т
Н'м SMF' SM Т
1
Л+— 4— а-(36)
Ю0 Vo.c )
226
6.2. Основные уравнения линейной модели импульсного ППН
Линейная импульсная модель ППН (рис.6.4) представля-
ег собой линейную импульсную систему с двумя синхронно,
но несинфазно работающими импульсными элементами
ЦЭ1, ИЭ2. Передаточная функция приведенной непрерыв-
ной части этой системы без учета звена запаздывания е~р,л
W{p) = S FUBИ/ф(p)VF(р) = £,р + ^~2 ’<37>
7ф (р + а)2+со2
где SM=T/Un- = T^^LC
передаточная функция цепи обратной связи Wo с(р) определяет-
ся равенством (24).
Поскольку разность степеней полиномов знаменателя и чис-
лителя передаточной функции W(p) не превышает 1, то сигнал
Диу(0 претерпевает скачки в моменты воздействия дельта-
импульсов на непрерывную часть, т.е. в моменты выключения
регулирующего транзистора. Однако при учете запаздывания г32
импульсный элемент ИЭ1 реагирует на левое значение сигнала
4uy(0 в момент 1=у\Т, предшествующий скачку, и никаких
сложностей, связанных со скачком сигнала Д«у(0, не возникает.
Для составления уравнения относительно сигнала на
входе импульсного элемента ИЭ1 структурными преобразо-
ваниями приводим схему на рис.6.4 к изображенному на
рис.6.8 виду, где
^(Р) = %.з (Р^ф (Р)^о.с(Р) ; (P) = ; (38)
^p) = SuFU^(p)- ^4(р)^ф_3(р)^ф(р); ^5(Р) = ^((Р)-
Суммируя все сигналы, действующие на входе импульс-
ного элемента ИЭ1, и переходя к ^-преобразованиям, запи-
шем уравнение
227
&uy(z, e) = K{K2\Uon(z,t) + ZE {PK2(p)AZH л(р)-к{п^1н a(p)}~
- )^U,E)AC/exU,O) - ZE{e-^Te-p‘^(p)]\Uy(z, Y1), (39)
где W[p)= W^ip) W0.c(p) — передаточная функция разомкнутой
системы без учета звена запаздывания е~р'л .
Здесь учтено, что смещение момента срабатывания им-
пульсного элемента ИЭ1 на время эквивалентно нали-
чию в приведенной непрерывной части такого же запазды-
вания [34]. Тогда суммарное запаздывание будет
У1Т + f32 = h ~ f3i + G2 = Не-
смещенные ^-преобразования сигналов на входе им-
пульсного элемента ИЭ1 (рис.6.8) определяются следующим
образом: 1) поскольку сигнал обратной связи образуется по-
сле прохождения сигнала Лму(/) через импульсный элемент
ИЭ1 и непрерывную часть с передаточной функцией
е^И^р), г-преобразование этого сигнала равно произве-
дению импульсной передаточной функции (7) на
^-преобразование последовательности дискретных значений
сигнала Диу(/) в моменты срабатывания импульсного элемен-
та ИЭ1 ЛЦ,(г,У1); 2) аналогично ^-преобразование сигнала на
входе ИЭ1, вызванного напряжением Дивх(/), определяется
как произведение импульсной передаточной функции
^iU,E) = ZE{fJ/1(p)} на ^-изображение последовательности
дискретных значений напряжения Дмвх(Х) в моменты
228
срабатывания импульсного элемента ИЭ2 A6BX(z,0) = At4xU)J
3) z-преобразование сигнала на входе ИЭ1, вызванного то-
ком Д/н.д(0, образуется несколько иначе в связи с тем, что
отсутствуют импульсные элементы в цепях передачи тока
д/нд(0 на вход ИЭ1; в этом случае приходится определять
z-преобразование суммы произведений передаточных функ-
ций указанных цепей передачи (по Лапласу) на изображение
по Лапласу тока
= г^2(р)^н.л(р) - ^1ллтА4.д(р))-
Указанная особенность приводит к тому, что не может быть
определена импульсная передаточная функция системы по
возмущающему воздействию Д/н.д(0> в то время как опреде-
ляется импульсная передаточная функция для возмущения
Аквх(0 132
Примеры. 1. Найдем импульсную передаточную функцию разомк-
нутой системы IT(z,e) без учета запаздывания. Сначала по таблице [31]
находим
ZcoSE<o07’-fircos(l-s)of|7’^ 1
Z2 - 2zdcose>QT +1 <J)0
—_______. ю°_______________
“о J [(р + а)2+со^
1
i „ -a
z sinsco07 + Ain(l - е)<0о Т
Z? -2zdcosa0T+l
, (40)
где d = e aT.
Теперь с учетом (37) имеем
.... . FK^VyTR^C zde f т п \ t
W(Z, e) =--1)1 \ ----:--------------—у {z cose<o0T - dcos(l - e)(n0T +
Тф z - 2zd cos ю0Т + d
+ — ---a ||zsins®07’ + rfsin(l - е)ш0Т]> . (41)
®0 I ox J J
2. Определим импульсную передаточную функцию разомкнутой
системы с учетом запаздывания Wy(z,e) = ZE {е р'° И^(р)}, где
y = tJT.
По формуле (7), учитывая (41), при 0<Е<у имеем:
^(z.5)=Z1Hz(z,1+e-y)=
FK^TI^C d1+^
Тф z2-2zdcosa>0T+d2
{zcos(l+E-y)co07’ -
229
-</cos(y-e)o0T + — I -J—-a |t
«’о Ио.с )
а при y<e< 1 —
(z, е) = 1Г(г> е - у) = ^»т^б£ {г cos(e _ 7)ЮоГ _
Гф z -2zd cos <x>QT + d
1 5. ,1
zd
-</cos(1-£+y)<o0'T + - I ~—a |[zsin(E-Y)©07’ + </sin(l-s+y)©0T]l. (43)
^0 V^o-C J J
В уравнении (39) ^-преобразование суммарного возму-
щения на входе импульсного элемента ИЭ1 обозначим через
At7B(z,E) = ZE{^2(p)AZH.4(p)}-
- АЛад (г, б) - (z, Е)Д (zfi) - (44)
Тогда, подставляя в (39) Е=уь с учетом равенств уз2 = y-yt и
(42) решаем его относительно Лбу(г,У1) и получаем одно из
основных соотношений для замкнутой системы
Д67 (z у ) =
У ’ 1 1 + ^1И/'(г,1-уз2)
позволяющее определять реакции системы на изменения опор-
ного напряжения, возмущений и проводить анализ устойчивости.
Характеристическое уравнение замкнутой импульсной
системы получается приравниванием к нулю знаменателя
правой части (45):
l + rW,l-Y32)= 0. (46)
По общей методике [32, 34] запишем равенство, связы-
вающее т-изображение выходного сигнала импульсной сис-
темы (рис.6.8) Дивых(0=Аыс(0 с изображениями управляю-
щего и возмущающих воздействий:
aC/HkU,e) = SMFUBXW^7(z,E)^Uy(z,-Yi) +
+ Ж4(г,Е)ДЕ7вх(г,0) - ZE{R/5(p)AZHJl(p)),
где аналогично (7)
(47)
Z ’Кф(г, l+E- y) при 0 < E < Y,
(ГфС^е-у) при у < s < 1.
(48)
^фу(^) =
230
Примеры. I. Найти импульсную передаточную функцию W^,t(z,e)
для случая, когда И^,(р) определяется выражением (1).
По таблице [31] имеем
гг/ 7 Г то К* Zsinw0T+dsin(l-E)a0T
®07ф [(р + а) +«oj ©о7* Z -2zdcoswoT + d^
Учитывая равенства (48), (49), при 0<е<у получаем
ж 1 //l+e > *sinfl + Е - Y)©or + </sin(y - е)в>0Т
& ’Е <oeT^ z2 - 2^rfcosoor + d2
а при у<в<1 -
w , ч _£ф_ J.-7 Z Sin(e - у)а0Г + J sin(l - е + у)а0Г
Z’ <авТф z2 - 2zd cos а0Т + d2
2. Найти импульсную передаточную функцию J%(z,s).
С учетом (38), (1) имеем
W = ^{^(р)Жф(р)} = ^zj-, 1 с7° -2
Тф 1ЖР+“) + ®о
Представим функцию 1/{р[(р+а)2+®2]} в виде суммы простых
дробей:
1 - + А2Р+аз д(р2+ 2ар + а2+сво)+ Агр2+А3р
р[(р + а)2+ а>о] р (Р+а)2+®о р[(р + “)2 + ©о]
Из этого равенства следует система уравнений:
Ау + А^ — 0 j 2аЛ। + А3 = 0 j Ay (сс2 + ©q ) — 1,
откуда с учетом равенства ©0= - а2 из §1.1 получим:
л 1
^22
а + ©о
Таким образом,
= Гф2 ; А2 = -А, = ; А3 = -2^ = -2a7^2. (52)
FK,(z,c) = ^zJ(l-e-^) --
р + 2а
Р (р + а) + coq J
(53)
где
1
р + 2и__
+ а)2+©ц
~-z,
z-1
z__________zde______
z-1 z2 -2zdcosa>0T +d2
(р + а) +
- — Z,
©о
©о
(р + а)2+©о.
z cose©07’ + — sincm0P -
х “о J
- d cos (1 - е) авТ----sin (1 - в) <а0Т
шс
(54)
231
с учетом (7) при 0<e<y
p + 2a
d1^
Z Je~pr,> —_____________
Д Lp (? + a)2+too_.
+ — sin(l + £ - y)®oT cos(y - e)<oo7’- — sin(y - e)£o()T' i, (5j\
top coq J
а при yge< 1 —
j____________
P (p + a)2+a>^
— sin(E-y)cJ07’ ~d cos(l - в + y)cooZ - sin (1 - s + y)(s>0T L (56)
®0 J L °0 J J
Подставляя (54), (55) в (53), при 0<e<y получаем
X*d*
- 2 ----+ 6 - v)®0Т
Z~l z-2zd cos (o0T+d£
(й()
p + 2a
T~i —HCOS(E"^°T
z-1 z -2ZccosсооГ+ d
coo
coseco0T' + —sineooT" -
®o J
^4(Z,e) = ^—
Z -2z«coSto0r + g
- zd cos (1 - e)coo7’- — sin (1 - e)to07’ - Zrf1-Y[cos(l + e - у)<в0Т
®o
+ — sin(l + e-y)®07’ +rf2"T cos(y-e)<i>07’- —sm(y-£)®07’
°>o J L
а подставляя (54), (56) в (53), при у<в< 1 —
«о
; (57)
COSEffl0T + —sinaooT|-
too J
Hz4(z,e) = - ----------------T
Z' - 2zdcos o)OjT + d7
-zd cos(l-e)oor sin (1-е)й()7’ - z7d~'t cos (e - y)<D07’+
-a shi(e - у)с90Г +z<7
to0
©0
T COS (1 — E + v) С>оГ— <l sin (1 - E + y) WoT
too
- (58)
Подставив выражение (45) в (47), с учетом (44) получим
Д^выхС^е) = ^опи,Е)Д^оп(^¥1) +
+ ^вх и, Е)Л (7ВХ (2,0) + А (7вых.й,н д {Z, е) ,
где импульсные передаточные функции для опорного напряжения
Д^вых.йЦоп(г,Е) = S^FU^K^jz,^
Д^оп(г,У1)
(60)
232
и для входного напряжения ППН
. ч Д^вых.л«вх(г,Е)
U Е)= -е) " -----Г“; (61 >
А/т 1 + 2 1^(2,1-Уй)
Д«7вх(г,0)
а Д^вых.л/'ид (^’^)> А^вых.диоп Е) Д^вых.л«Ю[ (£»Е) сме-
щенные ^-преобразования составляющих изменения выход-
ного напряжения, вызванных изменениями дополнительного
тока нагрузки, опорного и входного напряжений;
= ,5“Г^7;,;(г,Е). -
1 + 2 ‘^(z,l-y32)
- ^Д/^.е)]- Ze{^5(p)AlHJ[(p)}. (62)
Пример. Найти передаточную функцию ^(г.с), входящую в ра-
венство (61).
Используя выражения (1), (24), (25), запишем
^100 =
6 е -Р'о ) Р + У^о-с
Т’ф />[(/> +а)2 +<йо]
Сначала представим в виде суммы простых дробей выражение
Р + 1/Гох _ Bi । В2р + В3
д[(р + а)2 + Oq] Р (р + сс)2+а>о
2>i(p2 + 2ар + а2 + <вд) + В2рг + В3р
д[(/> + а)2 + Оо]
Из уравнений
В1 + В2 = О, В3 + 2аВ] =1, (а2 + <Oq)-®i =
о.с
находим:
в = 1
1 (а2 + «о Х.с
у2 <т>2
—; j?2 =-^г-; Бз =1-2аВ!.
о.с о.с
(63)
Тогда с учетом (63)
р + 1/Т0,с Bt + В2(р + а)+ В3 -Вга
р[(д + а)2 + Оо^ Р (Р + а)2 + “о
Bi в р + а + 1-аВ,
Р (р + а) + ш0 (р + а) + Оо
По таблицам находим
233
Z J . —L = Bl -------—----------у ( - Bl [z cos E©07
lp[(/> + a)2 + ®2]J z _ 1 z ~ 2z^ cose>0T + d I
- d cos(l - е)<в0Г] + -—[z sin ео0Г + d sin(l - e)cooT] .
<»o
Аналогично (7) для 0<s<y имеем
Z I e p,a P + 1 _ _51_ +
I p[(p + a)2 +<0o]J Z ~ 1
d1+e^T
+ —у---------------—у-{/?,[zcos(1 + E- у)®0Т - dcos(y - £)<о0Г] +
Z - 2zd coso0T + d
+ -—[z sin (1 + e - y) wdT + d sin (у - e)<b0T] •,
«о
а для у<Е< 1 —
Z ^e p,° ?+ ^^°-c 1 - ff z j ______zc^
I p[(?+a) +«o]J Z-1 Z-2z4/cosoor+d2
-Д[гсоБ£-у)со07’-
1 — olB 1
- d cos(l - s + у)<»0Г] +----- [z sin(s - y)®07’ + d sin(l - e + y)®oH f •
®o J
Теперь при 0<е<у получаем
z c~p>°) в+УГрс +________________________________________
1 p[(/’+a)2 + °>o]j z2~2zd coS(d0T + d2
z2(cos ecooT -
——sinecs0TI + zd cos(l - е)ш0Т + ——— sin(l - е)ш0Т +
£1)q J _ Og
+ d Tcos(l + s - y)aBT--~-—-d T sin(l + e - у)ш0Г -
-rf2-’
®0
cos (y - e) &oT + —5—— sin (y - e) e>QT
o0
(64)
а при y<e< 1 —
_______Bjde
Z2 -2zdcosa0T + d2
Z2 -coscaioT +
+ _a sin s®07 + d"< cos (e - y) &0T - ^2--a- d-1 sin (e - y) ^aT
<j>o
+ zd cos (I - E.)mer +
Sin (1 _ E) a0T - d'l cos (1 - e + у) to0T -
<B0
l/Б] -a „
—--------d 1 sin (1 - e + y) a0T
a>0
(65)
234
Сравнивая (64) и (57), замечаем, что
6е=_"кЯл(г>Е)+ --------------- (66)
’[ р[(р + а)2 + йо|| ^Ф <B0{z2 -2zdcos(oBT + d2)
где для 0<е<7
5(z,e) = d*{z2 sineffi0T + z[rfsin(1 ~e)<o0T -J1-1' sin(l + e-у)®о7’]-
-d2~y sin(Y-E)®or}. (67)
Искомое преобразование имеет вид:
^i(z.E) = ^ф^2Ддт-zJ(l - -А. (68)
7ф I p[(p + a) +®o]J
Характеристический полином
Преобразуем с учетом (41) знаменатель правой части
выражения (45):
1 + Z 1—уз2) =
2 2
z + ajZ + g
Z2 - 2zdcos(o0T + d2
(69)
где
_ ^rQrv1^6^ jl-r-,2
“1 T2
2Ф
cos(l - уз2)о0Г +
+ —[-A- -ajsin(l - уз2)сооТ
^0 \-*o.c J
_ FK^v^TI^C
2d cosco0T;
(70)
— ----a siiiY32“or-cosy32co0r
*4 o.c J
+J2.(71)
В соответствии с (46) имеем характеристическое уравнение:
Л(г)= z2 + «12 + «2 = 0,
(72)
где A(z) ~ характеристический полином.
В связи с громоздкостью и сложностью точных расчетов
большое значение для практики имеют приближенные формулы,
получаемые из точных с учетом того, что потери мощности в
элементах силовой части реальных ППН и пульсации
235
выходного напряжения малы. Представляют интерес лищь
простые приближенные формулы, которые правильно отра-
жают характер важнейших зависимостей и имеют приемле-
мую погрешность.
Учитывая, что в большинстве реальных схем ППН
a/«l, аоТ«1, Уз2«1, из (70), (71) находим приближенные
выражения для коэффициентов характеристического уравне-
ния (72):
7 Г 7 Г 1 f 7
ах = d\Fv,—^= *о-т==(1 -У32) + " + -7== -2);(73)
1 [ 4lc[ 0 Л~с 1з2/ % J IVZcJ ’
а2 = d2
т
1 + FV, -у=:
(74)
т
где фактор пульсаций определяется по приближенной фор-
муле (4.48), а коэффициент
d = еаТ
, 1 Т Г
2VZc< <20;
(75)
Формула (4.48), полученная в предположении d~l, дает
небольшую погрешность при расчете F в широком диапазоне
изменения параметров -JLC/T и q. В отличие от этого
предположение в формулах (73), (74) может оказаться
слишком грубым, поскольку например, при <2о=!О, <7=1,
VZc/7 = 2,5 имеем d «0,802, </2*0,644.
Сравнение точных зависимостей коэффициентов харак-
теристического уравнения а\, а2 от Кц, соответствующих
0о=10; JLClT = 2,5; v}=l; v2=0; м=0,5; y3j=y32=0
(сплошные линии на рис.6.9), с приближенными кривыми,
построенными по формулам (73), (74) (штриховые линии),
подтверждают пригодность этих формул для практических
расчетов. Из формулы (74) следует важный для практики вы-
вод: увеличение коэффициента нагрузки q, например за счет
236
роста волнового сопротивления фильтра -JL/C, при посто-
янном коэффициенте приводит к увеличению о2, а также
модуля комплексных корней и росту колебательности пере-
ходных процессов. К такому же выводу придем и в том слу-
чае, когда увеличение q связано с уменьшением сопротивле-
ния нагрузки R и, как следствие, с увеличением А^г; в этом
случае для обеспечения постоянства нужно уменьшить,
например, коэффициент Къ входящий в выражение
6.3. Анализ устойчивости импульсного ППН
Как известно, для устойчивости линейной импульсной
системы необходимо и достаточно; чтобы все корни уравне-
ния (72) были по модулю не больше единицы; корни, моду-
ли которых равны единице, были простыми [29].
Условия устойчивости импульсной системы с характери-
стическим уравнением (72) сводятся к трем неравенствам [34]:
1 + а} + а2 > 0, 1 - Oj + а2 > 0,
1 - с2 > 0•
(76)
237
Действительно, при вещественных корнях Zj, Z2 уравнения (72)
для устойчивости системы необходимо и достаточно выполне-
ние неравенства
_ 1 < ~ Д1 ± 7^1 ~ < j
2
откуда
— 2 < i y ^2] — 4^2 < + 2.
Если выполняется неравенство
^aj - 4а2 <д1+2, (77)
то непременно выполняется - 4с2 <ах +2. Поэтому
достаточно рассмотреть соотношение (77), при котором корень
_ - а\ + у1а^-4а2
Z\ - —-——----------------------------< 1.
Наоборот, если соотношение (77) не выполняется, то Zi>\
Видно, что поскольку положительна левая часть (77), то по-
ложительна и правая. Возводя неравенство (77) в квадрат и
упрощая, приходим к первому неравенству (76). Итак, нару-
шение первого условия (76) соответствует переходу корня zi
через значение 1.
Если верно неравенство
О] — 2 < —йу — 4t?2 j (78)
то обязательно выполняется условие - 2 < -^а2 - 4с2 Поэтому
достаточно рассмотреть неравенство (78), при котором корень
Правая часть в (78) отрицательна, поэтому отрицательна ле-
вая часть и по модулю больше правой. Из (78) следует
(ci - 2)2 > с2 - 4а2,
238
откуда получаем второе неравенство (76). Таким образом,
нарушение второго условия (76) соответствует выходу корня
Z2 из единичного круга через значение -1 (рис.6.10,а).
При of -4а2 <0 уравнение (72) имеет комплексные корни
42 = - О]2 ,
квадрат модуля которых
1Чг| = ^£ + ^(4с2-с12)= й2-
а б
Рис.6.10
единичного круга (рис.6.10,б).
Условие |zi2| =а2<]
даегг третье неравенство
(76), нарушение которого
соответствует выходу пары
комплексно-сопр5гженных
корней уравнения (72) из
Обычно для понижающего ППН определяющими явля-
ются второе и третье неравенства (76). Подставляя выраже-
ния (70), (71) во второе неравенство, получаем
V4----D + D ) < _L 5
L {К^С 3 4J Ям
где
d1 [sin(l - уз2)<о0Г - d sin уз2ю0 Г].
1 + 2d cosm0T + d2
(79)
(80)
D4 =-------------------j-(cos(l - уз2) w07" + d со&ул(й0Т +
1 + 2d cos(D0r + d I
+ — f - a] [sin (1 - у з2) и0Т - d sin у з2а0Т H. (81)
(o0(/<C J J
Можно показать, что
1 — 2y32 i- rx 1
--------; lim Da = ~.
wqT ->0 2
aZ-0
(82)
lim rr,
®qT—>0 coqT^ 4
a7=0
239
Подставляя выражение (19) в (79), получаем:
-1 Г X 2
К V Г) D ( ? +К V /оп>
J^j ° ItJ -(83)
При расчете границ устойчивости используются сле-
дующие соотношения между физическими и относительны-
ми параметрами:
Заменяя неравенство (83) равенством и решая относи-
тельно Ао, находим
граничный коэффи-
циент усиления Аогр
и строим зависимости
АОгр от у!ЬС/Т при
у з2=®
00=10, v,=l, ^=0
(—) и K^/q = A
(рис.6.11).
Кривые для у=0,9 и
у=0,7 при ЛЬТ=О прак-
тически совпадают с
кривыми для у=0,1 и
у=0,3. Области устой-
чивости располагают-
ся ниже граничной кривой.
Полагая в неравенстве (83) аТ —0 и используя предель-
ные значения Dj, D2/a0T (29) и D3/a0T, D4 (82), приходим
к упрощенному критерию устойчивости:
240
^ОтИ ^Я(2у - 1) + Aoh|j - Yi(l - Yr)] < - <85>
Это же условие получается при подстановке (73), (74) и
(4 48) во второе неравенство (76) с учетом (75).
Согласно (85) при наличии только отрицательной обратной
связи по напряжению (Aqt=0) условие устойчивости имеет вид
rvzc? 2
t Т J O,5-yt(l-y,)’
(86)
а при наличии только отрицательной обратной связи по току
реактора фильтра (Kq=0) и у>0,5 —
„ L 2
OtV' < TR 2у - Г
(87)
Как видно из (85), при у<0,5 отрицательная обратная
связь по току увеличивает граничный коэффициент усиле-
ния контура регулирования напряжения а при у>0,5
уменьшает. При Qo>lO и q<l изменения Qo и q мало влияют
на устойчивость, и результаты расчетов по условиям (83) и
(85) на интервале -Jlc!t>\ практически совпадают.
В случае наличия запаздывания при выключении регу-
лирующего транзистора уз2 возможно нарушение устойчиво-
сти ППН за счет выхода из единичного круга пары ком-
плексно-сопряженных корней уравнения (72). В этом случае
определяющим становится третье условие (76), которое с
учетом (71) записывается в виде
— f-^-a]siny32co0T-cosy32c)0T
7ф ( |_®о )
Кк J 1-d2
+ —лЧ. sin уз2а0Т ) < ——,
соо^С J Ни
+
(88)
где Ны определяется выражением (4.49).
Используя упрощенные формулы (74) и (4.48), получаем
241
^OtV1
L+
I Co #6
i+(i_y)L+±
(I-Y)(Y1-Уз2)Г„ , 1) T
2 I Co J VlC
____T
Qol-jLC.
(89)
Уз2 “
На рис.6.12,a и б представлены зависимости и фак,
тора пульсаций на границе устойчивости от VZC/Т для
Qo=lO; <7=(Z6=U w=0,3; vj=l; V2=Q', у31=0. На правых пологих
участках граничных кривых, соответствующих условиям (88)
(сплошные линии) и (89) (штриховые линии), нарушение ус-
тойчивости происходит за счет выхода пары комплексных кор-
ней уравнения (72) из единичного круга. При расчетах по
приближенным соотношениям (85) и (89) в них подставлялись
значения yj = (т| -тз1)/тп , получаемые в качестве промежуточ-
ных данных при машинном расчете по точным соотношениям.
Расчеты по точным соотношениям при уз1=0,05; 732=0,1
показали, что запаздывание при включении регулирующего
транзистора слабо влияет на динамические свойства линеа-
ризованных моделей ППН с модуляцией момента выключе-
ния транзистора.
При достаточно большом коэффициенте усиления Kq в
установившемся режиме справедливо равенство
242
y=yi+y32««=const, откуда следует, что с увеличением отно-
сительного запаздывания при выключении уз2 уменьшается
уь а это согласно (85) приводит к снижению граничного ко-
эффициента усиления гр.
Годографы полюсов импульсной передаточной функции
Была разработана программа расчета динамических ха-
рактеристик понижающего ППН на основе полученных ана-
литических соотношений. В частности, проводился расчет
полюсов импульсной передаточной функции замкнутой систе-
мы, совпадающих с корнями характеристического уравнения:
I 2
г1<2=-|± ^-*2- (90)
На рис.6.13,с и б представлены расчетные годографы по-
люсов Z\, Z2 для <2о~Ю; tf=<76=l; 4ТС/Т = 2,5; ^=1; v2=0;
Уз1=Уз2=0; о=0,5 (о) и о=0,6 (б) и постоянных значений ко-
эффициента Аот- Штриховые линии соответствуют постоян-
ным значениям Kq. При увеличении Kq пара комплексных
полюсов перемещается влево, сливается на действительной
оси, после чего один полюс Z\ движется вправо, а второй zi ~
влево вдоль действительной оси. В рассматриваемой схеме им-
пульсного ППН (рис.4.9) при отсутствии запаздывания выход
полюсов из единичного круга и нарушение устойчивости воз-
можны только за счет перехода одним из полюсов значения -I.
Модуль пары комплексно-сопряженных полюсов
гмк ~ 4^2 При отсутствии обратной связи по току (1^=0)
согласно (71) полюсы с изменением Kq перемещаются по ок-
ружности радиуса гм.к=^~ехР(^тп)3 гае <^=аГф, тп=777ф, на
небольшом удалении от единичной окружности. Это обу-
словливает высокую колебательность и большую длитель-
ность переходных процессов. Этот факт отмечен также в ра-
боте [35], где однако не рассмотрено влияние обратной связи
По току. С увеличением К^ комплексно-сопряженные полюсы
243
приближаются к началу координат, что приводит к более
быстрому затуханию переходных процессов. Так же влияет
на полюсы увеличение относительного опорного напряже-
ния и с 0,5 до 0,6.
Рис.6.13
Запаздывание моделируемого фронта импульса на входе
фильтра (уз2^0) согласно (71) приводит к росту модуля ком-
плексных полюсов zM K и их расстояния от начала координат с
увеличением Kq. Становится возможным нарушение устой-
чивости за счет выхода пары комплексных полюсов из еди-
ничного круга. На рис.6.13,в представлены годографы полю-
сов Z1,2 ДЛЯ Qo=lO; И=1; v2~0; «=0,3; уз1=0,05;
244
Уз2=0,1; ^LC)Т = 2,5 и -JLC/Т -S. Как видно, введение
обратной связи по току дросселя фильтра может компенси-
ровать влияние запаздывания.
6.4. Анализ импульсного ППН
с асинхронным интегральным ШИМ
Приближенный анализ «быстрого» контура
линейной импульсной модели ППН
Для импульсной модели ППН со сбросом интегратора
(рис.5.10) при ЛиЕХ(/)=0 и отсчете времени от момента сраба-
тывания импульсного элемента ИЭ1 справедливо уравнение
A Uк (z, е) =---- bE(z,-ty - Z, ] -Д- Л (р) I -
z -1 J
- K2K№SuFUwzJ е-^1[лСШ-0) - ЛUon2(z,-0)],
Щий J
(91)
где
Af(z,e) =ГлПоп2(г,е) + (1- F)AJ7H(?,e) (92)
— смещенное ^-преобразование сигнала на входе импульс-
ного элемента ИЭЗ; z/(z -1) — импульсная передаточная
функция интегратора; ^UK{p) — изображение по Лапласу
медленно изменяющегося сигнала
А«м (0 = (Ку - К2Кар) А«ВЬ[Х (0 - K2KnprAiL(t). (93)
Принимая во внимание наличие скачка сигнала А«и(г) в
момент t=Q, при определении ^-изображения АДи(г,-0) сна-
чала в уравнении (91) положим е=1, а затем учтем, что для
некоторой переменной x(f), претерпевающей скачки в мо-
менты t=nT,
X(z,-W) = г‘ЛГ(г,1).
(94)
С учетом (92) имеем
245
ДС/иа,1) =-^AFfc-O) - ZE=1M-At/M(p) -
Z -1 \TKp J
- K2KapSMFUBX ±_^[Af7HU,-0) - At/on2(z,-0)].
Далее
AJ7H(z,-4)) = Z~XVK{Z,1) = --L- AE(z,4))-ZeJA’1 -
' 1*ий J
K2K.,FSFL’ i r ,
- - Д^оп2(г,-0)
ти Z-1
Отсюда с учетом (92) получим
A(4(z,-0) = -^^A^on2(z,4))--^^ZE=Jj-Ai7M(p)l,(95)
z zt z(z Z]) [ J
где введено обозначение
( КРК,SUв ")
Z1 = F 1 - -2—- -ю . (96)
\ * и )
Медленно изменяющаяся величина Дим(0 является вход-
ным сигналом «быстрого» контура, включающего в себя за-
ключенную в штриховой прямоугольник часть схемы на
рис.5.10, импульсный элемент ИЭ1 и замыкающегося, минуя
£С-фильтр, через звено с коэффициентом передачи К2К№.
Согласно методу разделения движений [5] второй член в
правой части равенства (95) учитывает влияние «медленной»
переменной на «быструю». В первом приближении при рас-
смотрении процессов в «быстром» контуре можно принять
медленно изменяющуюся величину А«м(/‘) постоянной. Тогда
величина Z[ представляет собой корень характеристического
уравнения «быстрого» контура. При реальных значениях па-
раметров ППН в большинстве случаев гщО, либо zj<0. В
этой области параметров применение приближенной форму-
лы для корня характеристического уравнения (96) дает не-
значительную погрешность.
246
Далее будем полагать F=l, что соответствует отсутствию
пульсаций опорного напряжения нОП2(0-
Выражение (96) с учетом равенств (5.28) и
RjK2 = Л/7?2 представляется в виде (при Аф=1):
Rt Н
у ---1----1
, _ )
( я, ,
1 + Y К R “ 1
(ЛДрЯ2
Rj ^onl
RspR2 ^вх
_ ^°Р1
(97)
Полагая, что нарушение устойчивости «быстрого» конту-
ра ППН происходит за счет перехода корня zi через значе-
ние -1, условие устойчивости ^>-1 представляем в виде
I ЗД ивк}/ t K^R2 J
при K№R2/R}>\ и
Y>fo,5--A M/k Л 1
I V2^J/l *ap*2J
при ^w7?2/7?j<1.
(98)
(99)
Аналогично для схемы, отличающейся от изображенной
на рис.5.1 заземлением левого конца обмотки w2 дросселя
L1, получаем условия устойчивости
у <
0,5 - fl + R1 /fl-—?!—
I R2J ^др^вх J/ I ^apR2 >
при K^R2 /2?i >1 и
0,5-
у >
1 + R] I ^ont / 1 - R' )
R2 J ^др^вх . / l ^др^2 J
(100)
(Wl)
при ТСдрЛ2 /Л1<1.
На рис.6.14,а представлены границы областей устойчиво-
сти, полученные по соотношениям (98), (99), на рис.6.14,5 —
По (100), (101), а также экспериментальные точки для
^=1,^/^ =0,2 (о о) и Гоп1/6/вх=0,1(по). Схема
247
экспериментального макета полностью совпадает с рис.5.1
регулирующий транзистор типа 286ЕПЗ, дроссель L1 типа
Д13-20В (£1=80 мкГн), конденсатор С1 типа К50-29-
220 мкФ. Сопротивление нагрузки А устанавливалось таким,
чтобы обеспечить режим непрерывного тока дросселя. Вход-
ное напряжение t/BX=20 В, рабочая частота 20 кГц. Управ-
ляющая часть содержит RS-триггер на элементах К155ЛАЗ с
усилителем К155ЛЛ2 на выходе, операционный усилитель
DA1 типа КР140УД8А, компаратор DA2 типа К554САЗА,
ключ VS1 типа К561КТЗ.
Граница устойчивости при заданном значении Соп1 /(/ЕХ
состоит из двух ветвей: правая часть соответствует условиям
(98) и (100), левая — (99) и (101). Как видно из рис.6.14, по-
лучено хорошее совпадение эксперимента с теорией. В экс-
перименте влияние «медленного» контура на устойчивость
наблюдалось примерно в области K„pR2/R} <0,5, у > 0,5.
В соответствии с методом разделения движений, полагая
сигналы Аг*оп2(0, Аам(/) постоянными и равными At70n2, At/M,
преобразуем равенство (95) к виду:
АДи(г-0) = ----v----п- (Ю2)
V Тя J(z-z})(z-l)
248
Переходя от (102) к оригиналу, находим выражение, опреде-
ляющее процесс в «быстром» контуре,
Д«и(«,-0) = -|Ч^оп2 + (ЮЗ)
\ * И J 1
и установившееся значение
ДМи(со-0) = ^1—А(7оп2 - дгум. (104)
1-^1 M1-Z1)
Случай интегратора без сброса
В случае интегратора без сброса, когда линейная им-
пульсная модель отличается от рис.5.10 отсутствием допол-
нительного контура с импульсным элементом ИЭЗ, уравне-
ние динамики получается из (91) при A£(z,-0)=0:
At/Ii(z,e) = -zJ_l-A«7M(p)l-
1 пР J (105)
- KiK^FU^zJ^-e-^ ][A£7„U,^0) - А1/оп2(^,-0)],
1*иР J
где время отсчитывается от момента срабатывания импульс-
ного элемента ИЭ1 (рис.5.10).
Из (105) аналогично (95) получим
ЛСШ-0) = ЬАдг7оп2(г,-0)_ -^-vZe=J J- At/M(J,(106)
Z-Zi Z(Z-Zi) [Тир J
где
Zl = 1 - (107)
Из (107) с учетом выражения для SM (5.29) при F=1 получим
Z^~^-. (108)
1-у
Следовательно, условие устойчивости в этом случае имеет вид
у < 0,5. (109)
Экспериментальная проверка подтвердила этот вывод.
249
Линейная импульсная модель для медленных процессов в ПГПJ
с асинхронным интегральным ШИМ
Для уменьшения длительности процессов в «быстром»
контуре параметры ППН целесообразно выбирать так, чтобы
выполнялось условие « 1. Тогда согласно (103) эти про-
цессы затухают практически за несколько периодов дискре-
тизации Т. В экспериментальном макете наблюдались про-
цессы конечной длительности в «быстром» контуре. Теоре-
тические результаты также допускают подобный режим при
— 0, т.е. согласно (97) при
yrj_£^Ak^ni5 1 =goni (110)
\ ) Свх V Щ У Лф Ь'вых
После затухания процессов в «быстром» контуре для схемы
на рис.5.10 справедливо равенство (104), и с выхода «быстрого»
контура на вход £С-филътра поступает последовательность
дельта-импульсов площадью $ыивк[кии (<»,-0) - Д«оп2(а>,-0)].
Согласно методу разделения движений считаем, что равенст-
во (104) остается справедливым не только при постоянных
Диоп2(0 ~ д^оп2 и Амм(0 но и ПРИ медленных их изме-
нениях. Поэтому в модели для «медленных» процессов
Аии(л,-0) = Дмоп2(л,-0) - —-—-А«м(и,-0),
1-Zi 7и(1-?1)
а сигнал на входе импульсного элемента ИЭ1
Аии (л-0) - Д«ОП2 (и,-0) = -
т
ГТ
* V
1 и ) L *
В соответствии с этим равенством из рис. 5.10 получается схема
замещения «быстрой» части модели для «медленных» процес-
сов (рис.6.15,о) и импульсная модель для «медленных» про-
цессов (рис.6.15,6) без учета медленных изменений входного
напряжения. Здесь
SMFU_^
TK(1-ZJ
250
- коэффициент передачи «быстрой» части схемы ППН для
медленных процессов, при Г=1 с учетом (96)
Рис.6.15
Преимущество приближенной импульсной модели ППН
(рис.6.15,6) состоит в том, что она описывается уравнением
второго порядка, а не третьего, как исходная модель (рис.5.10).
Из-за малости сопротивления г в схеме (рис.6.15,6) действует
только обратная связь по выходному напряжению. Для улуч-
шения динамических свойств, как было уже отмечено, целесо-
образно введение дополнительной обратной связи по току
дросселя или конденсатора фильтра. Анализ полученной им-
пульсной модели может быть проведен аналогично § 6.1-6.3. В
частности, методом ^-преобразования получаем характери-
стическое уравнение замкнутой системы
Z2 +alMz + a2M =0, (112)
где без учета на рис.6.15,6 влияния обратной связи по току
аналогично (70) и (71)
, „ KTdx~'132 sin(l - у3->)<о071
c1M = -2dcosа0Т +------------; (113)
ю0?ф
й2м = d2 + d2^32 siny32<n07; (114)
251
K—K6K^(Ki~K2Kap) — коэффициент усиления разомкнутого
контура обратной связи по напряжению; d = е~аТ; со0, а -
параметры £С-фильтра.
Полагая корни уравнения (112) комплексными, находи^
их действительную zy? и мнимую zj части:
1 7 ГТ
Zr = zl =-рм-(-^J • <115)
Зависимости Zr и zj от параметра Кяр R2/R\, рассчитан-
ные по формулам (115), (113), (114) для Qo = 10; <7 = = 1;
TLC/T = 2,5; и, = 1; и2 = (7оп2/(ЗДСА6)= -0,4; ^=0,4, по-
казаны на рис.6.16
штриховыми линиями
(сплошные линии -
результаты точных
расчетов для модели
третьего порядка). Как
видно, в диапазоне
изменения параметра
в котором
вещественный корень
Zi~0, формулы (115)
могут быть использо-
ваны для приближен-
ного расчета вещест-
I венной и мнимой частей комплексного корня характеристи-
ческого уравнения модели на рис.5.10.
Условие устойчивости медленных процессов при
с2м > с12м А имеет вид
d2 + ~KT-d2'^ siny32“o5r< 1- (ПО
Поскольку при отсутствии запаздывания (у32=0) условие
(116), полученное в предположении Zi«0, всегда выполняется,
то приходим к выводу о том, что выполнение условия zi=0
I
252
При Уз2=0 обеспечивает устойчивость как «быстрой», так и
«медленной» частей ППН.
6.5. Рекомендации по выбору параметров ППН
с асинхронным интегральным ШИМ
Если утах ~UBhlx/UBX min >0,5, то ШИМ выполняется на ба-
зе интегратора со сбросом, в противном случае можно применяй»
интегратор без сброса. Рассмотрим выбор параметров для пер-
вого, наиболее сложного случая. Частоту/, период дискретизации
T=A/f и параметры £С-фильтра будем считать найденными,
например, исходя из рекомендаций, изложенных в § 1.7 - 1.9.
Известны требуемое среднее значение выходного напряжения
[/ВЬ1Х и номинальное входное напряжение t/BX.
Параметры схемы управления определяются в следую-
щем порядке.
1. Задаемся значениями опорных напряжений С7оп1>0,
t7on2<0.
2. Из уравнения (110) с учетом равенства нахо-
дим значение параметра
Кцр&2 _ | _ t^onl
А] С/вых
обеспечивающее выполнение условия zi~0. Задавшись ^др®1,
получим
7?1 + Т?2 !
^1 J ^др
3. Из уравнения (5.5) находим постоянную времени ин-
тегратора
’ _ V т ^вых ^onl
11 ' ТТ — TJ
^оп! ^оп2
4. Вычисляем коэффициент усиления контура обратной
связи по напряжению
к=къкф(кх-к2к^)=кф
R\ I | ^др ^2
*1 J
_ ^Л>П1/^ВЫХ
1 —^onl/^вых
И проверяем устойчивость по условию (116).
253
Далее проводится расчет показателей качества ППН ц
экспериментальное исследование, по результатам которых
найденные параметры уточняются.
Для устранения влияния запаздывания при выключении
регулирующего транзистора на устойчивость и динамику ППН
Рис.6.17
предложен способ
управления ППН с
асинхронным ин-
тегральным ШИМ
[36], поясняемый
схемой на
рис.6.17,а.
Одновременно
с включением ре-
гулирующего тран-
зистора в тактовые
моменты времени,
задаваемые генера-
тором ГТИ, к ка-
налу обратной свя-
зи путем переклю-
чения управляе-
мого переключате-
ля (УП) в положе-
ние, показанное на
рис.6.17,о, под-
ключается коррек-
тирующий сигнал «к, пропорциональный напряжению на об-
мотке дросселя фильтра. Из корректирующего сигнала с помо-
щью разделительного конденсатора Ср исключается постоянная
составляющая. Полученный сигнал и'к складывается с напря-
жением рассогласования 6^П1-Дцывых, где напряжение С70п1 по-
лучается от источника опорных напряжений ИОН;
254
— коэффициент передачи делителя напряжения Д. Суммарное
напряжение подается на интегратор И, затем — на компаратор К.
В момент равенства сигналов ии и Uotq вырабатывается
управляющий импульс выключения регулирующего транзистора и
одновременно отключается корректирующий сигнал u'L до очеред-
ного тактового момента, для чего переключатель УП переводится в
положение, противоположное показанному на рис.6.17,о.
В случае интегратора без сброса, как показано на
рис.6.17,с, среднее значение выходного напряжения
17вых=^оп1/^д-
Работа схемы иллюстрируется временными диаграммами
(рис.6.17,6).
6.6. Анализ ППН с частотно-фазовым ШИМ
Линейная импульсная модель ППН
Изложение основывается на работах [25, 26]. Линеаризуя
эквивалентную структурную схему ППН с ЧФШИМ
(рис.5.15), приходим к линейной импульсной модели
(рис.6.18), где фактор пульсаций
у.__ 1 , (117)
~ 1-<(^о-0)/ЯпОо)’
Рис.6.18
крутизна модуляционной характеристики ШИМ
(118)
gnVo)
Л О — малое возмущение, приведенное ко входу импульсною эле-
мента; ёс(г0-0) —значение производной в стационарном режиме
сЛева от момента окончания импульса им на выходе ШИМ.
255
Предполагая в схеме на рис.5.15 применение дифферен-
циатора с передаточной функцией №к(р) = Т(р в качестве
корректирующего звена, получаем
(Р) = 1 - КЯр + Т[р , (119)
где Т{ — постоянная времени корректирующего звена.
Как было показано в §5.4, при выполнении управляемых ге-
нераторов на базе интеграторов со сбросом рассматриваемая схе-
ма ППН с ЧФШИМ является вариантом схем ППН с асинхрон-
ным интегральным ШИМ, усложненным введением дополни-
тельного корректирующего звена WK{p)=T(p. Схемы отличаются
также способами подключения источников опорных напряжений.
С учетом равенства (5.37) и уравнений фильтра (1.1), где
/н.д=0, напряжение обратной связи представляется в виде
“«х - Knicd^ + («„ А ♦ - (120)
< \ / КА-1
Обозначив 7) = Клр L/R + 7]', Z22 = K^LC, получим
UoAp) = ^oAp)Ubm(p), (121)
где
И/о.с(Р) = 1 + 71р + 7’22р2. (122)
Согласно рис.6.18 и выражениям (121), (122) передаточ-
ная функция непрерывной части линейной импульсной мо-
дели ППН есть
W(p) = (123)
ТфЯ(р + «) +®о]
где
ггтт к
ко = (124)
Уи2А2
— коэффициент усиления разомкнутой системы без учета
фактора пульсаций.
Подставив (120) в (5.36) и проинтегрировав в стационар-
ном режиме, с учетом равенства нулю приращений ДмВЬ1Х И
A (duBbLX /dt) за период найдем:
256
—— 4((ивых + U3)dt = ~—(UBb!X + U3) - A2.
m I x вых о f rri x выл о r z.
Ча :• 'и2
‘л
выражая Т^Д? из этого равенства и подставляя в (124), получаем
iz _ ^Ф^вх ________________________I______ Н25)
° ^вых+^з Y + M^bx)'
Как видно из рис.6.18 и выражения (123), рассматривае-
мый ППН с ЧФШИМ является таким частным случаем ППН
с ШИМ-2 и ПИД-регулятором, для которого выполняется до-
полнительное условие (125). Полной эквивалентности между
ППН с ЧФШИМ и ШИМ-2 нет даже при 0<у<1, поскольку в
схеме с ШИМ-2 коэффициент усиления разомкнутой системы
Ко может измениться независимо от у, а в схеме с ЧФШИМ
коэффициент Ко жестко связан с у соотношением (125).
При Адр=1 и 7]'=0 подаваемый на ведомый генератор Г2
сигнал и0 с равен напряжению на входе ZC-фильтра. В этом
случае, как и в стабилизаторе, предложенном в [37], обеспечива-
ется идеальная стабилизация среднего значения напряжения на
входе фильтра. Однако отклонения выходного напряжения ППН
в этом случае системой управления не контролируются, что при-
водит к появлению ошибки стабилизации при изменении тока
нагрузки, кроме того, медленно затухают переходные процессы в
фильтре. В отличие от этого в схеме на рис.5.14,а при A^p^l и
7]' * 0 заданное значение напряжения на входе фильтра зависит
от контролируемых в этом случае дополнительных координат.
Такое построение схемы управления позволяет реализовать
преимущества предложенного в [37] способа стабилизации на-
пряжения (быстродействие и точность регулирования напряже-
ния на входе фильтра) и устранить его недостатки.
Расчет фактора пульсаций
Для определения значения производной ёс(/о-О), вхо-
дящей в выражение (117), можно воспользоваться методом
257
^-преобразования, поскольку в стационарном режиме на
вход фильтра подаются импульсы прямоугольной формы по-
стоянной высоты UBX и длительности t$. Тогда с учетом
рис.5.15 для определения производной ec(f) при воздействии
таких импульсов можем воспользоваться схемой на рис.6.19,
где ИЛф.3(р) = (1-е’р/°)/р —передаточная функция звена, фор-
мирующего прямоугольные импульсы из последовательности
дельта-импульсов; с(р) определяется выражением (122).
Согласно рис.6.19 смещенное ^-преобразование сигнала
ёс (/) можно найти по формуле
4^2
z-1 z-1
1-е-^о ^(p)^o.c(p)
Р ^и2^2Р
Z Z (1-₽-p/°) * + + P
т l
. (126)
vUon-U3 Z
^и2А2 Z-1
Примеры. 1. Представить в виде суммы простых дробей функцию
1 + г.р + т22р2
Gf/’[(/’ + к)2 + о? ]
Найдем коэффициенты А2, Л-2, Аз, удовлетворяющие равенству
I + Tjp-t-T/p2 _ At + А2р + А3 _ At(р2 + 2ар + а2 + Юр) + А2р2 + А3Р
р[(р+а)2+<»о] Р (р + а)2+с>о р[(р+ а)2+<Bq]
откуда следуют уравнения:
Д(а2 + ш§)= 1; 2аИ, + ф = Т} ; А, + А2 = Т/.
Из этих уравнений имеем
А=^-Ц- = Тф2; А2=Т2-Т2-, Л3=Т1-2аГф2.
а +0о
258
Следовательно, искомое разложение имеет вид:
14-г,р+ г2У = 1 + [(Т2/Гф)2 -1]р + 7;/Гф2-2а
7фр[(р+а)2 + ш§] Р (р + а)2+шо
(127)
2. Найти смещенное ^-преобразование функции (127).
По таблице г-преобразований [31] находим
——----------?- j sin w>QT + d sin(l - t.)a0T]
ш07ф ш0 J
(128)
3 Найти смещенное г-преобразование функции
1 +• Т\Р + ТгР
для 0<a<y.
С учетом равенств (7), (128) для 0<s<y получаем
l+T1P + T2p2
Z\e pt°
rfI+E-y
T2
К
У 1
-1 [z cos(l +8 - y)o0T - d cos(y - e)tooT]+
Z2 -2zdcosa0T + d2
+1 ~---------— l[z sin(l + e - y)a0T + d sin(y - в)а0Т ]
coo7^ <t>o J
Подставляя выражения (128), (129) в (126), для с=у получаем
у^оп - из _К^ z_
Ги2Д2 Z-1 Т Z-1
^0 z 1
Т z-1 z2 -2zdcoscoqT + d2
dy cosycooF-
259
- zd1+Y cos(l - у)®0Г- ztZcos®0T+1/2]+
,fa-aT22
®о?ф
[z2dY sinyq)74 zdl+Y sin(l-Y)®07-zdsirico0r] .
По теореме о конечном значении решетчатой функции имеем
ёс(л,у) = ёс(го~О) = liraE(z,у) = -v^n
Z Т
2
Т
Zk
7k
-1 А +
У1-аТ22
k ю0^ф
а
А
где коэффициенты Z)b Z>2 определяются выражениями (20)
при У1=у.
Поскольку согласно (5.46)
v^on ~ ~ ( + *кЖвых = ^вых» Кк = (0) = 0, то с
учетом (124) справедливо равенство
Поэтому
v^on ~ ^з _ ^вых _ КфуЦж _ Л~оу
^и2д2 7и2а2 ?
Z X?
|%у
ёсао-О) = -у1(1-У)-у-
-1
< “О^ф
А +
®о J
Подставив это выражение в равенство (117), с учетом (118)
найдем
| = 1+^о(1-у)-^о|(х2-1)А +
(1+х2) М>(130)
о>о7ф ®о J
где
тх kR9l/r + t[
у — —L —L------• Уэ =
гтп rrt У /V Z
уф 7ф
/ гГ \2
*2
<^Ф >
(131)
Лф
В реальных ППН на интервалах включенного и вы-
ключенного состояний транзистора ток дросселя фильтра
изменяется по законам, близким к линейным, пульсации вы-
ходного напряжения малы по сравнению с его средним значе-
нием £/вых Поэтому справедливы приближенные выражения:
260
I = K^U^T y(l - y)
dt |/=ro-o T& 2
d2UniM
dt2
= £ф£^(1_у)_2а-^
L=*o-o dt
Подставляя эти выражения в равенство
е (0 = -К-~ (^оп - ^3 - ВДых - Ъ - Т? ^-АгЧ ’
а 7 ТКфиъх оп з д вых I dt - dti J
вытекающее из структурной схемы (рис.5.15) и соотношения
(121), получаем приближенное выражение
1 i . р- С. Т о_ Wl-y) . , ,Л
Т. - 1 т П.о Л1 ч
2 - Ц /ф
По формуле (130)
рассчитаны зависимости,
представленные на
рис.6.20 (£?о=1°; ?=9б=1;
И~1; У=03 и 0,5). Расче-
ты по формуле (132) да-
ют близкие к представ-
ленным на рис.6.20 ре-
зультаты.
Анализ устойчивости ППН с ЧФШИМ
Передаточная функция разомкнутой импульсной модели
ППН ЧФШИМ (рис.6.18) с учетом (122), (124) и (127) опре-
деляется следующим образом:
И/(р) =
7Т<7вхГИф(р)1Иос(р) x + TlP + T2p2
С учетом (128) характеристический многочлен замкнутой
системы определяется из выражения
261
l + 2‘W,l) = l + £^- +
г-1
FK0
Z2 -2zd cosa0T+d2
^.2~ltzdcOS(S)0T-d2
Xi
юо2ф
£dsinco07> =
3 2
Z + «1^ ____
(г-1)(г2 -2zdcosto0T+d2)
где коэффициенты характеристического уравнения:
а, = F£0(l + dAi) -1 - 2Jcosco07',
a2 - d2 + 2d cos ©0T - FK0d[Ax +2cosco0T + (x2 -l)d],
aj - d2(FKox2 - l),
A = (X2 - 1)COSQ0T +
X1
®о7ф
-- (l + Хз) sm<B0T.
(Bo
(134)
(135)
Из пяти условий устойчивости системы [33]
1) 1 + С] + а2 + а3 > 0, 2) 1 - а1 + а2 - а3 > 0,
3) 3(1 + а3) - Oj - а2 > 0, 4) 3(1 - с3) + а{ - а2 > 0, (136)
5) 1 - а2 + а3а3 - а2 > 0,
как показывает анализ, первое всегда выполняется, из ос-
тальных условий определяющими являются второе и пятое.
Второе условие с учетом (130) преобразуется к виду:
Z-F < a~(l + X2)+](l+ 2c1cos<b07 + г/2] L + i-y-2(l +
и(Нф ®о L Ио 2
+ (х2 -W+^V1 (l-^2)T[</sinco07’-Z)2(] +2rfcosto07+^2)]’l.(137)
2 J
Пятое условие представляется в виде неравенства
X2(FK0)2d2A2 + FK0 [(1 - d)2 А2 + z2d2 - 1]+ 1 - d2 > 0 ,(138)
где
, ,( „ а . „Л Jsin<BnT
1-а cosoqY +—sin<o0T +%.--------У—
_ V___________ юо______)____ыо2ф _
1 - 2d cosro0T + d2
262
X2d\ d -cosco07" +—sincon7’
к “о
l-2c?cosco07' + d2
Условия (137), (138) справедливы в общем случае преобразо-
вателя с ПИД-регулированием, зависящего от параметров Qo,
JLCjT, Xji X2> Vй ^o- В этом случае неравенство (138) с
учетом (130) можно решить в явном виде относительно критиче-
ского коэффициента усиления Ао.кр. Для этого в выражение
1
Ко
^--1 + у-(х2-1)А
Xi
(1 + х2) Я,
соо
(139)
полученное из (130), подставляется значение FKq, найденное
из (138).
Для ППН с ЧФШИМ имеет место дополнительное ус-
ловие (125), и неравенство (138) может быть решено в явном
виде относительно U3/(Кфиву.). Учитывая, что величина
FK0, определяемая из (138), не зависит от у, а коэффициенты
Z?b Z)2 согласно (20) не зависят от xi и Х2> можно упростить
алгоритм расчета границы области устойчивости.
При малых значениях аТ и ю07) ограничиваясь первыми
членами разложений экспонент и тригонометрических
функций в степенные ряды, можно упросить неравенства
(137) и (138):
X. < + + , (140)
XI X2l QoJ Т 0,5-у(1-у)
х > ю т ( -------------— - —*2 . (141)
Z1 ° ^аГ + хДо FK0 2 )
При значениях параметров, представляющих наибольший ин-
терес, соотношения (140), (141) дают хорошее приближение.
На рис. 6.21 представлены расчетные границы областей
Устойчивости для Qo = 10; t/3=0; ? = % = 0,1 (-);
9 - 1(—) и экспериментальные точки для q = 0,2;
263
JLC/T = 2; у = 0,3 (°°); у - 0,5 (°°); у = 0,7(хх). Область ус-
тойчивости располагается выше граничной кривой. Правая граница
устойчивости соответствует условию (137), левая — условию (138).
Экспериментальные точки получены на ППН, собранном
согласно рис.5.14,а на транзисторе КТ908, Zi=4 мГн, С=1 мкФ
и 0=62 мкФ, Г'вх—15 В. Генератор Г2 выполнен по схеме с из-
менением направления интегрирования; интегратор собран на
операционном усилителе 140УД8, с помощью аналогового пере-
ключателя KI76KT1 производится изменение полярности под-
ключения напряжения ио.с+^з ко входу интегратора; компаратор
собран на микросхеме К521САЗ. Корректирующее звено КЗ вы-
полнено также на операционном усилителе. В условиях экспери-
мента при переходе через границы устойчивости происходило мяг-
кое возбуждение субгармонических колебаний, т.е. на небольшом
удалении от границы амплитуда этих колебаний нарастала плавно,
начиная с нуля. Увеличивающееся с ростом уд отличие экспери-
ментальных точек от расчетных кривых на рис.6.21 объясняется
неизбежной на практике погрешностью дифференциатора КЗ.
Анализ устойчивости по приближенным соотношениям
В импульсной модели ППН с ЧФШИМ (рис.6.18) также, как
в схеме на рис. 5.10, имеется «быстрый» контур, замыкающийся
минуя ГС-фильтр. Корень характеристического уравнения этого
контура может определяться по приближенной формуле
264
, XapTFUm
Zi =1-—.T~. —,
Ju2a2
аналогичной (96) и с учетом (124) и (131) принимающей вид
Z1 = i_ РК^^1-ГХ2к0. (142)
С учетом равенства (125) для £]<0 получаем условие ус-
тойчивости «быстрого» контура
где фактор пульсаций Fможет определяться по формуле (132).
В связи с наличием дифференцирующего звена
1УК (Р) = Т\Р допущение о медленном изменении сигнала на
входе указанного «быстрого» контура может не выполняться
и потребуется уточнение соотношений (142), (143).
Используя уравнения фильтра (1.1), при 1н.д=0 получаем
равенства
АЧ = С(р)(дмвхф - Дивых),
г- т> (144)
21'рДИвых = Аывых >
где р — оператор дифференцирования; G(p) = (Zp + г)-1.
Как видно, сигнал 71РДивых, пропорциональный произ-
водной выходного напряжения ППН, может быть сформи-
рован в виде линейной комбинации сигналов Д/д и Дмрь1х. С
учетом равенств (144) и (119) линейная импульсная модель
ППН с ЧФШИМ (рис.6.18) преобразуется к виду, показан-
ному на рис.6.22. В реальных схемах ППН величина ДиВЬ1Х(0
является медленно изменяющейся переменной по сравнению
с Дмвх.ф(0 и Д/т(0- Поэтому в соответствии с методом разде-
ления движений [5] при рассмотрении процессов в «быст-
ром» контуре можно принимать Д«вых(/)=const.
265
Передаточная функция непрерывной части «быстрого»
контура
%(Р) = FKo12 Р + (145)
р(р + r/L)
где . Определяя дискретную передаточ-
ную функцию Hefec), соответствующую №б(р), представляем
характеристическое уравнение «быстрого» контура
1 + z~lW'6(z,l) = 0 в виде (72), где
«1 = ЖоХ2[Л + (1 - Л)4]-1 - 4; а2 = 4(1 - ЖоХ2);
>4 = С07’17(#фХ27’ф);4=е-7’г/Л
Условие устойчивости «быстрого « контура
2(1 + 4) - fkoX2 [J(1 - 4) + 24] > о
(146)
при 1/(2о « Q совпадает с (140).
Рис.6.23
с ЧФШИМ (рис.6.23). Из этой
функцию разомкнутой системы
Заменяя на рис.6.18
импульсный элемент про-
порциональным звеном с
коэффициентом передачи
1/7', получаем линейную
непрерывную модель ППН
схемы имеем передаточную
Щ2р[(Р + а)2 +<»о1
266
Характеристическое уравнение замкнутой системы
1+И^>(р)=0 представляется в виде
ф3 + + K0F^p2 + (1 + K0F^p + = О,
где Отсюда на основании 1фитерия Гурвица следует ус-
ловие устойчивости непрерывной модели ППН с ЧФШИМ
Т (
Xi >
V
(147)
1_________1
2aT + %2FKo
Условие (147) при малых значениях T/T$ практически
совпадает с неравенством (141) и может использоваться для
расчета левой границы области устойчивости.
6.7. Анализ импульсного ППН с учетом входного £С-фильтра
Эквивалентная структурная схема силовой части
На рис.6.24 изображена схема силовой части понижаю-
щего импульсного ППН с входным LC-фильтром, где для
общности показано сопротивление R1, включенное парал-
лельно конденсатору С1 входного фильтра.
Рис.6.24
Уравнения выходного фильтра (1.1) в операторной форме с
учетом принятых на рис.6.24 обозначений записываются в виде
4 = ^2(/О(^вх.ф ~^вых)> ^вых — 21 )0'2 —,'нл)> (148)
отличающемся от (4.51) только обозначениями;
G2(р) = U(L2p+r2y, Z2(р) =Т?2 /№ С2р +1).
Аналогично записываются уравнения входного фильтра:
4 — Gi(p)(eBX — wBX), wBX = 2 (р)(/\ — iBX), (149)
267
где Gi(/?)=l/(£Lp+ri); Zj(p)=2?1/(/?1CLp+l). Уравнениям (149)
схема (рис.6.25), аналогичная
соответствует структурная
Рис. 6.25
структурной схеме выход-
ного фильтра, использо-
ванной на рис.4.13.
На основании уравне-
ний (148), (149) получаем
эквивалентную структур-
ную схему силовой части понижающего ППН (рис.6.26,а),
где ключ К1, переключающийся так же, как регулирующий
транзистор в исходной схеме (рис.6.24), формирует напряже-
ние «ву ф из ивх. Ключ К2, переключающийся синхронно и
синфазно с К1, формирует входной ток /вх из тока /2-
Перенеся точку суммирования сигнала /вх на вход звена
б)(р), точку суммирования сигнала /ня на выход звена Z2(p),
а точку съема сигнала, подаваемого на ключ К2, - также на
выход звена Z2(p), получаем схему, изображенную на
рис.6.26,б. Затем с учетом выражений для передаточных
функций фильтров
268
U7 (n\- Gl(P)Zl(P) W (n\~ G2(P)Z2(P) /, sm
^ф! \P) i f-' ( \7 ( " ф2\Р/ « f-, / \yr / \
Ф 1 + Gi(p)^i(p) 1 + G2(p)Z2(p)
приходим к структурной схеме на рис.6.26,в.
Из полученной структурной схемы (рис.6.26,в) следуют равен-
ства:
*2 + Z^p^=
1+G2(^2(p)““* +Гф2^ ’
^ВХ ^ф! (р) ^вх
первое из которых получается также исключением «вых из
уравнений (148), а второе — исключением i\ из уравнений
(149) и учетом (150). Это подтверждает правильность преоб-
разований структурной схемы.
Линейная импульсная модель с учетом входного ZC-фильтра
На рис.6.27 показаны временные диаграммы для стацио-
нарного режима работы структурной схемы ППН (рис.6.26,в)
(сплошные линии) и для воз-
мущенного режима, мало от-
личающегося от стационар-
ного (штриховые линии). На
основании кривых для малых
отклонений Д«вх ф(?), Дгвх(?)
и уравнений (4.44), (23) из
структурной схемы (рис.6.26,в)
аналогично рис.4.13 и 6.4 по-
лучаем линейную импульсную
модель (рис.6.28).
Импульсный элемент ИЭ1
генерирует дельта-импульсы в
моменты выключения регулирующего транзистора и ключей К1,
К2. Контур, состоящий из импульсного элемента ИЭ1, фильтра
Пф2(р) и цепи обратной связи f^ac(p), совпадает с таким же
контуром на рис.6.4 (без учета звена запаздывания е~р'32). До-
полнительные ветви обусловлены влиянием входного фильтра.
269
Импульсные элементы ИЭ2, ИЭЗ представляют собой, как
и KI, К2, ключи, замыкающиеся на время включенного со-
стояния регулирующего транзистора, и осуществляют АИМ-2.
Каждый импульс Л.'вх на рис.6.28 представляется в виде
суммы дельта-импульса площадью /2(4))Дго> получаемого по-
сле прохождения выходного импульса элемента ИЭ1 через
пропорциональное звено с коэффициентом передачи
5Mf72(^), и импульса конечной длительности t0 и малой вы-
соты А£2(0» получаемого с выхода ключа ИЭЗ.
Анализ методом усреднения
Наличие в схеме на рис.6.28 трех импульсных элементов
усложняет анализ, поэтому примем весьма существенные уп-
рощающие допущения, позволяющие тем не менее выявить
основные особенности, связанные с влиянием входного LC-
фильтра на работу импульсного ППН. Изложение основыва-
ется на работе В.П. Шипилло и Н.Д. Левицкой [40].
Для хорошего сглаживания пульсаций входного напряжения
«вх(0 и тока, потребляемого от первичного источника ix(f), вход-
ной фильтр должен обладать достаточной инерционностью, т.е.
/ф' “ <<f’
270
где f — частота дискретизации ППН. Поэтому при хорошем
быстродействии и точности регулирования напряжения час-
тота оказывается внутри полосы пропускания системы
стабилизации 0ф1<Л)- Это означает, что влияние «медлен-
ных» процессов во входном фильтре на выходное напряже-
ние ППН практически отсутствует, пока ППН находится в
рабочем диапазоне управления (у< 1).
В установившемся режиме для схемы на рис.6.24 спра-
ведливы следующие уравнения для средних значений токов
и напряжений:
£/_х + /вхг. = £вх, /1с0 = ZBX = Г > (151)
ИХ Вл L их 3 icp ВЛ ГГ 3 х f
* ВХ
где т) - КПД ППН без учета входного фильтра; — активное
сопротивление цепи дросселя Ll; Р — мошность на выходе
ППН. Из уравнений (151) имеем
^bxI.2
На рис. 6.29 дана графическая иллюстрация решений сис-
темы (151), которые соот-
ветствуют пересечениям
внешней характеристики
входной цепи ППН, зада-
ваемой первым уравнени-
ем, и линией постоянной
мощности, строящейся по
второму уравнению. Стати-
ческая устойчивость дос-
тигается в точке 1, а точка 2 является неустойчивой. В точке 1
' Рг‘
8x1 2 V 4 ц ’
=__________2Р________
n(^BX +7^вх -4Рй/п)
(152)
(153)
271
статическое входное сопротивление ППН
О
-“вх ст
tr„, р
Л» ? гр
f
1+
<
V П^вх J
-гР (154)
Максимальная по условиям статической устойчивости
мощность ППН соответствует касанию в точке 3 внешней
характеристики входной цепи и линии постоянной мощно-
сти. Формально это соответствует слиянию точек 1 и 2, т.е.
равенству -J-Евх ~4Pr{/r\ = 0, откуда
р = /1554
л max .ст
Статическое входное сопротивление с учетом (154) и
(155) представляется в виде
*вх.ст = 2-Р«/1 + J1 - - Т- (156)
* \ -Гmax.ст /
Относительная мощность Ртах ст/Р однозначно опреде-
ляет запас статической устойчивости и КПД входной цепи
ППН, с учетом (156)
_ ^вх.ст _ I + л/1 - Р/Рщах ст - W^max.cr)
ВХ Д,х.ст+'1 1+Vl-Wax ст
Умножая числитель и знаменатель правой части этого равен-
ства на 1-Vl-P/Zinax.cT , получаем
_ 1 + V1 - Р/Ртах~
(157)
Дифференциальное входное сопротивление ППН определя-
ем из второго уравнения (151):
D — —_____ИЯЯУ
Лвхд .Т г2 ~ Г ~ ^вх.ст> (ТОо)
т7вх 7ВХ
т.е. дифференциальное сопротивление /?вх д по модулю равно
статическому, но имеет отрицательный знак.
272
Заменяя в структурной схеме входного фильтра
(pj.jc.6-25) мгновенные значения токов и напряжений сред-
ними значениями и учитывая равенство
(159)
**ВХ.СТ
вытекающее из (158), получаем структурную схему на
рис.6.30,а. Как видно, звено Zx(p) охвачено цепью положи-
тельной обратной связи, являющейся причиной возникновения
колебаний во входной цепи ППН.
Передаточная функция звена Zt(p), охваченного положи-
тельной обратной связью, с учетом выражения для Z\(p) есть
Z (Р)~ - 1
'Ho.ctP) j 11'
i-^-z,(p)
-ABX CT I \P) 7 VBX CT
Отсюда видно, что влияние ППН на входной фильтр можно
учесть присоединением отрицательного сопротивления -
/?вхст параллельно конденсатору фильтра Q и сопротивле-
нию /?! (рис.6.30,б).
Передаточная функция разомкнутого контура на
рис.6.30,а получается следующим образом:
__________________1__________________
LjC.p2
экв 0^1 ^Р г\ / ^Тэкв
а характеристическое уравнение замкнутого контура
l+l₽i(p)=0 представится в виде
AC1p2+f-^-+rIc1V-/i- + i = o, (160)
. хЩэкв ) •'Чэкв
где 7?|экв — А|||( 2?вх ст)-
273
Согласно критерию Гурвица условия устойчивости сцс,
темы второго порядка сводятся к требованиям положитедь,
ности коэффициентов характеристического уравнения [33]
т.е. согласно (160) получаем условия:
-^- + г.С. >0; -й—+ 1 >о,
р 1 1 /?
экв л1экв
откуда следует
Д«.сг > > М - <161)
М/л1 + rici
Во втором неравенстве (161) обычно (в частности
/?! отсутствует, т.е. 7?]—>оо). Поскольку сопротивление -
7?ВХ.Д=АЕХСТ определяется углом наклона касательной к линии
постоянной мощности, ясно, что в точке 2 на рис.6.29 вто-
рое условие устойчивости (161) всегда не выполняется, а в
точке 1 выполняется.
Обозначив
<162)
из неравенств (161) получим:
^ВХ.СТ 73 91 ’ 9вХ.СТ ** С1 91 > (163)
где Qi — добротность входного £С-фильтра без учета затуха-
ния, вносимого сопротивлением 7?р На рис.6.31 представле-
на граница области устойчивости входного фильтра ППН,
построенная при ?i=0.
Найдем линию, разделяющую области апериодических и
колебательных процессов во входном фильтре. Поскольку
корни характеристического уравнения (160)
Г 3 г V Т~ \
? + riG * -I I ъ— + rici _ — +1
Чэкв_____) 1\^Чэкв______7_________к Щ экв 7
27; С,
А,2 -
274
то при
А
п
1Х1экв
х2 / х
ч-гД -4£jCi -J—+ 1 <&
) \ *Чэкв )
(164)
Процессы колебательные.
Следовательно, линия, разделяющая области апериоди-
ческих и колебательных процессов, описывается уравнением
2 J 1 _ 1
б’вх.СТ + Д Q J^BX.CT
Решения этого уравнения есть
Рис.6.31
?вх.ст1,2 <3 ?! — 2.
Щ J
Поскольку ^вх.ст>0’ 10 имеет смысл
только одно решение
?ВХ.СТ ~ 2 ~
определяющее искомую линию,
также построенную на рис.6.31
(линия без штриховки).
Интересно оценить макси-
мальную мощность на выходе ППН, определяемую с учетом
условий динамической устойчивости (161). Подставляя выра-
жение (154) в первое неравенство (161), являющееся опреде-
ляющим при реальных значениях добротности Qi, получаем:
Р < П£вх IV1 +С|,Р = О12(1 + 9161) (1б7)
ri + riCj + 71 (ft2 + +1)
l А й J
Предельно допустимая по условиям устойчивости мощ-
ность преобразователя определяется меньшим из двух значе-
ний (155) и (167).
275
Переходные процессы во входном фильтре определяются
нелинейной системой дифференциальных уравнений, соот-
ветствующей структурной схеме на рис.6.25:
А + лЛ = Д» -О G= л(0- W
I (А-
Расчет процессов может быть выполнен численными методами.
7. ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННОГО НАПРЯЖЕНИЯ КАК
МНОГОМЕРНЫЕ ЛИНЕЙНЫЕ ИМПУЛЬСНЫЕ СИСТЕМЫ
7.1. Получение разностного уравнения и передаточных функции
линейной импульсной модели понижающего ППН
Как следует из материала предыдущей главы, использова-
ние ^-преобразования для определения фактора пульсаций и
расчета переходных процессов, вызванных возмущающими
воздействиями, из-за наличия в импульсной модели ППН
(рис.4.13 и 6.7) двух синхронно, но несинфазно работающих
импульсных элементов приводит к сложным и громоздким ал-
горитмам. Сложным оказывается даже вычисление прямого
^-преобразования. Учет чистого запаздывания t3z и повышение
порядка системы дифференциальных уравнений непрерывной
линейной части (НЛЧ) еще более усложняет применение
^-преобразования. Белее эффективным и универсальным явля-
ется метод анализа, основанный на представлении линейной
импульсной модели с несколькими импульсными элементами в
виде многомерной импульсной системы и составлении для нее
разностных уравнений [29]. Метод позволяет без затруднений
учитывать чистое запаздывание в системе, влияние возмущаю-
щих воздействий на процессы.
Для упрощения изменения дополнительного тока на-
грузки А/нд(/) и входного напряжения А«вх(0 будем аппрок-
симировать ступенчато изменяющимися функциями, кото-
рые меняются скачком в дискретные моменты времени t—nT,
276
а на интервалах nT<t<(n+l)T остаются постоянными. Это эк-
вивалентно пропусканию сигналов Аивх(/), А7НД(/) через идеаль-
ные импульсные элементы ИЭ2, ИЭЗ и экстраполяторы нуле-
вого порядка с весовыми функциями Sz(f), S^t). Тогда линейной
импульсной модели (рис.4.13) будет соответствовать разомкну-
тая импульсная система с непрерывной частью НЛЧ, ко входам
которой присоединены три импульсных элемента (рис.7.1,а).
На рис.7.1 ,6 поясняется образование входных сигналов НЛЧ.
Рис.7.1
Как видно, представление сигнала на входе фильтра в виде
суммы А«Вх.ф=У1+У2 соответствует ранее отмеченному разло-
жению импульса Аквх.ф(0 на два. С учетом сказанного, осно-
вываясь на уравнениях (1.1), можем записать нормальную
систему уравнений НЛЧ:
d(M,) г .. 1 . 1 . ,
= - 7М, - + уСИ + Ъ)>
at L L L
d(Mic) 1 1 1
dt C L RC c
(1)
m
Она может быть представлена в векторно-матричной форме
ф^ф + >нфУ ’
где Хф = ||Ai£, Аис Г _ вектор состояния с физическими коор.
динатами; у = || yt, у2, Уз ||т — вектор входных сигналов НЛЧ;
г 1 1 1
—— — — — — 0
^н.ф L 1 L 1 > ®н.ф - L L 1 (3)
0 0
С “ RC ~ с
Как видно, здесь матрица НЛЧ Ан ф совпадает с (1.3), а
матрица В'нф отличается от ВНф в связи с тем, что непре-
рывная часть, описываемая уравнениями (1.1), имеет два
входа, а в рассматриваемом случае — три.
Отсчитывая время от момента включения регулирую-
щего транзистора, вектор дискретных входных сигналов ра-
зомкнутой импульсной системы запишем в виде
f(M,£) = jA«y(«,y1-O), AuBX(n), А/нд(«)|т, (4)
где Е — векторный символ, указывающий на временной
сдвиг его компонентов относительно друг друга.
Обратим внимание на то, что импульсный элемент ИЭ1 на
рис.7.1,д реагирует на левое значение управляющего сигнала
Аиу(п,у!-0) в момент t=yxT пересечения графиков управляю-
щего и пилообразного сигналов, а дельта-импульс >’i (О форми-
руется в момент t—yT, т.е. с запаздыванием t32=y32T.
Согласно рис.7.1,с имеем равенства, связывающие вход-
ные сигналы НЛЧ и линейной импульсной системы:
00
У1(0 = ^А«у(л,У1-0)51(/-пТ-уТ),
"=° (5)
со со
У2(0 = Е Лг/вх (n)S2(t-nT), Уз(0 = X А<нД(«)А3(t- пТ),
и=0 и=0
278
где i=l,2,3 — весовая функция z-ro формирующего зве-
на, т.е. функция, описывающая один импульс у,(0- В рас-
сматриваемом случае
5,(0=^„ад;ад-!' при0;'<1,г’ ,
' " “ г' |0 при уТ < < < Т, (б)
53(0 = 1 при 0 < t < Т.
В равенствах (5) учтено, что с учетом запаздывания на вре-
мя /32 дельта-импульс У](0 формируется в момент t=nT+yT.
Равенства (5) запишем в матричной форме
y(r)= fs(/-«r-E)f(n,£), (7)
л=0
где
S(r -Е) = diag (t - у Г),S2(0,53(0] (8)
— диагональная матрица, составленная из весовых функций
формирующих звеньев
Решение матричного уравнения (2) можно записать сле-
дующим образом [3]:
гф(0 = Ф(Г-иП2ф(«Г+0)+ }ф(/--0В'н.фу(т)Л, (9)
пТ
где переходная матрица Ф(/) определяется выражением
(1.11). Если вектор /ф(/) претерпевает разрывы в моменты пТ
включения транзистора, то в выражении (9) подразумевается
правое значение 2ф(и7'+0).
Учитывая, что согласно (7) при nT<t<(n+E)T
y(t) = S(t-nT-E)f(n,E), (10)
введя в инте1рале новую переметшую v^x-nT, заменяя время
t по формуле Г=(и+е)7, 0<е<1, получаем уравнение разомкну-
той импульсной системы:
2ф(л,е) = Ф(еТ)2ф(и,+0) + R(E,f)f («,£), (11)
где введено обозначение 2ф(«,е) = гф [(л + е)Т];
279
еТ
R(e,£)= /Ф(е7-П)В^1Э(п-т=
0
|Л !<£>£) £) Лз(Е>£)
^21(е>£) £22 (е> £) Лгз^Л
(12)
Вывод элементов матрицы R(e,£)
Поскольку с учетом (3) и (8)
B^S(r]-£) =
yS^-yT) Ъ2(Л) О
L Л/
о 0 -^з(п)’
V/
принимая во внимание выражение (1.11), будем иметь:
ФСеГ-^В^-Г)^
Фп(еТ-ц) Ф12(е£-т1)| 751(й-уЛ |52(ц) О
° С '
-^Фп^-П^Дц-уЛ ^Фп^Т-т^гбт) -|;Ф12(е7,-п)£з(п)
уФ21(Е£-л)5](п-уЛ уФ21(Е£-л)^2(п) -уФггСе^-П^зМ
V
Ф21(е£-п) Ф22(е£-Т])
4s,h) ’(I3>
О
Используя равенства (6), (12), (13) и фильтрующее свой-
ство дельта-функции, при у<т]<1 получаем:
1 еТ
£п(е,£) = Ац(е,у) = - /Фц(е7 - 4Ш - yT)ch} =
L о
= ^fM8T _ л)б(п _ уГ)<А1 = Ихф[1(У _ лГ) .
L О L
Поскольку на интервале 0<е<у 51(г]-у7)=0, вычисляемый
интеграл также равен 0, поэтому
О при 0 < а < у,
' (14)
-- Фи(еТ _ уТ) при у < е < 1.
JLi
£ii{e5£) = (5m££,
280
Аналогично
1 еТ
R2i(e,£)= Я21(е>У) = J |ф21(е7’-т1)‘5’1(п - =
О при 0 < е < у,
^м£^ф21(бГ _ уТ} при у е < 1.
L
Далее согласно (12), (13) на интервале 0<с<у, где ^(л)-L
1 еТ . гТ
7?12(е,О=^2(е>°)=7 |Ф11(е'Г-п)‘$2(пМп=7 |Ф11(е^-пМп;
0 0 (16)
. еГ , гТ
Rn^,E)=R22^fS)=- |Ф21(е7’-т])52(т1)£?п=- |Ф21(еТ-п)<Й1 •
L о ь о
При определении интегралов элементов матрицы Ф(/)
учтем, что
|Ф(еГ - п)<Л1 = - 7}ф(0)<Й = - JeA«*edB = - А4еА^е|^"', =
= -Лн1фГеА"-ф(еТ'У) - еК^Т~1 = А^ф[ф(еГ - /) - ф(еТ -1")].
В силу равенства (1.13)
где
Г
|ф(еТ - n)Jn = [вф(ет - /)- Вф(ЕТ - Г)]в-*ф,
t'
2
с
о
Тогда
Вн‘ф=-АС
L О
О -с
г
^(eT - т|)б7т) =
(17)
о
1
L
-С[/>Ф12(еТ-у')-Лф12(е7-^)]
[^21^-1)- /’Ф21(е7’~ t )] -C[bф22^T-t)-bф22^T-t )]
281
В частности, из (17) при t = 0, t' = ъТ имеем
еТ
|Ф(еГ - г])Jrj =
о
^ф11(Е^) ~^ф!2(Е^)|1
^ф2|(е^) -С®ф22(еТ')|
где Лф11(0)=6ф12(0)=6ф21(0)=6ф22(0)=0.
С учетом (16) и (18) для 0<Е<у имеем
А12(е,£) --= Аф„ (еГ); /?22(е,£) = йф21(еГ) .
На интервале у<Е<1, где ЛгОО^О, вместо (16) имеем
1 1 ут
^2(Е^) = у |фн(еГ-пИп; л22(е^) = т [ф21(Е^ -пМ1-
L О L о
Поскольку из (17) при t = 0, t = уТ следует
уТ
JO(eT - t])Jt] =
_ |Щ*ф,1(ЕТ)-(>ф11(еГ-уТ)] -С[ЬФ12(еТ)-АФ12(е7-уГ)]|
и[^ф21 (Е - Ь$2\(гТ - у Г)] -С[/>Ф22(еТ)- ЛФ22(еТ - уГ)|
то на интервале у<Е< 1
^2^^) = *фи(Е^)- ^Фн(Е^ - уТ);
*22(e> Е) = Йф21(Е^) - 6ф21 (ЕТ - У Т). ’
Объединяя полученные результаты, можем записать
*ф11(еТ) при 0<Е<у,
(19)
Ч11(еГ)_/,Ф11(е2"“УТ) при у<е<1;
(18)
/?12 (£,£) =
/?22(е,Г) =
*Ф21(ЕЛ при 0<е<у,
*ф21(еЛ- Ьф21(£Т - уТ) при У < Е < 1. (2 )
282
Наконец, из (12) и (13) с учетом (6) для 0<е<1 имеем:
еГ гТ
/?13(е,£)=Л1з(€,0)=-- |Ф12(е7’-п)*5,з(т1Хп=-^ /Фп^-пХй;
с о о
. гТ ,zT
7?23(е,£)=А23(е,0)=-- |Ф22(еТ-ц)53(зМ=-^ {Фгг^7’-^ •
с о о
Снова воспользовавшись равенством (18), получим:
Л13(е, Е) = />ф12(еГ) при 0 s е < 1,
Я23(е, Е} = />ф22(еТ) при 0 < е < 1.
Поскольку с учетом выражений для элементов матрицы
(1.11) имеем Фп(0)=1, Ф21(0)=0, согласно равенствам (14), (15)
/?и(у-0,£)=0, Яп(у+0)=$мК7вх/£, /?21(у-0,£)=7?21(у+0,£)=0.
Следовательно, матрица R(e,£), точнее, ее элемент 7?ц(е,£),
имеет разрыв непрерывности в момент времени Е=у воздейст-
вия дельта-импульса на НЛЧ (см. рис.7.1, а). Отметим, что хотя
ток ii(f) и напряжение «с(0=квых(0 не имеют разрывов, сиг-
налы А4(0 и Д«с(0 могут претерпевать скачки в моменты воз-
действия дельта-импульсов на НЛЧ. Момент E=yi предшеству-
ет подаче дельта-импульса на НЛЧ, поэтому в этот момент ре-
шение не имеет разрыва и 2ф(п,У1-0)=гф(п,у1+0)=2ф(л,у1).
Разностное уравнение замкнутой системы
В замкнутой системе согласно равенству (4.26)
Диу = К1К2^иоа - ХцДЧ - Х12д“с> (22)
где хн = KiRw; %12 = КЛК1К2> поэтому с учетом (4)
f(«,E)=
Д«у(и,У1)
Д«вх(«)
Д1к.д(«)
^2ДЧ>п («Л1)
Д«вх(я)
А^пд(^)
Хи
О
О
Х12
о
о
= g(n,£)-Kz4>(«,yl),
(23)
I Д^(«>71) I
II Д"с(«. Vi)ll
283
g(«, E) = 11^1 K2 Дц,п (п, У1), Д«вх (л), AzH д («)||т (24)
— вектор входных сигналов замкнутой системы;
К =
Х11 Х12
О О
(25)
Подставляя выражение (23) в (11), получаем основное
уравнение, определяющее процессы в линейной импульсной
модели ППН,
гф(л,Е)=Ф(Е7’)2ф(и,0)+К(Е,£)§(л,£,)-К(£,£)К2ф(л,у1), (26)
в частности для е = у]
гф(лЛ1)=Ф(У17’)2ф('’>0)+К(У1,£’)8(яЛ)-К(У1,£)К2ф(л,у1).
Учитывая, что согласно (14) и (15) при 0<Е<у первый
столбец матрицы R(e,£) состоит из нулей, и поэтому с уче-
том вида матрицы К (25) R(yb£)K=0, получаем:
2ф(л,У1) = ®(yin^(«,0) + R(y1,£)g(«,£). (27)
Подставив (27) в (26) и приняв е=1, получим линейное
разностное уравнение замкнутой системы:
М" + !) = С гф(«) + pg(«, Е),
(28)
С' = Г‘ С'2 =Ф(Т)^(1,£)КФ(У1Т); (29)
IIC2I с22 II
Р = |Л1 Рп ^Lrq^P-Kr^^)]. (30)
II Р1\ Р12 Р13 II
гф(л,1) = 2ф(п + 1); 2ф(л,0) = 2ф(п).
284
Теперь найдем формулы для вычисления элементов мат-
риц С' и Р- Сначала найдем
D/1 rw Х12^п(1>•£)II
К( 1, /Л. — II ,
||хпа21(1,е) Х12^21(1Л)||
затем
R(l, Е)КФ(У1Т) = |Рп Р12|=р, (31)
II Р21 Р22 II
где с учетом (14), (15)
Рп ~ Хп^п(1>Е)Ф11(717’) + Х12^11(1) ^)®2i(Vi^) ~
= ФН(Т - уТ^ЛЛагФцСпП + Е0Ф21(У17’)1;
«фА
р21 ~ Х11^2105^)Фц(У1^) + Х12^21 (1> £)Фг1 (У1^) =
= ?7ф21^ - тШЛ(иГ) + еоф21(У1Т)];
ЛфА
р12 = Х11ЛП(1,Е)Ф12(Т17) + Х12^п(1> Е)Ф22(У]Т) = (32)
= УП[адгФ12(У1Г) + Е0Ф22(У17’)];
ЛфЬ
Р22 = Х11^21П’£)Ф12(У1^) + Х12-^210>^')Ф22(?1^) “
= ф21(^ - хЖ^ФрСт.П + *0Ф22(ъП].
АфЛ
Согласно (29) элементы матрицы С' определяются сле-
дующим образом:
С11 - Фц(П “ Рп '> с12 = ФрСО “ Р12 ;
С21 = ФгЛ^) - Ргй с22 = Ф22(^) - Р22
Аналогично находим
l-KR(yj,E) =
1
О
О
-Й1 -Й2
1 о
О 1
где Pl-XllA2(Vb-^)+Xl2^22(Vb£); Р2-Х1Лз(Т1>£)+Х12-^2з('У1>-£')>
285
а затем
р = |/гп(1,£) /?12(1,£) £13(1,£)| * *
||л21(1,£) £22(1,£) £23(1,£)|| о о j
|£н(1,£) -н£п(1,£) + £12(1,£) -ц2£п(1,£) + £13(1,£)||
||£21(1,£) -И1/?21(1,£) + £22(1,£) -р2£21(1,£)+£23(1,£)|
Отсюда с учетом (14), (15), (19) - (21)
р]1 = 7?11(1,£) = -7^Фп(Т-уП;
£21 = /?21а£)=^^Ф21(Г-уГ);
А2=-ц1£п(1,£)+£12(1,£)=-^Фп(£-уПк£От/’ф11(у1£)+
+ Wi(Yir)]+^11(£)-^11(£-y£);
£22 - -pi А21 (1, £) + /?22 (!,£)=- Ф21 (Т - у £)кj(у(Т)+
+ ^о^ф21(?1^)]+^ф21(£)-^ф21(£-у£); (34)
Аз=-ц2£ц(1,£) + Л13(1,£)=-^Ф11(Т-уТ)к£от&ф21(у1Т)+
+ ^о^ф22 (у i£)]+Ьф21 (£);
Аз = -р2л21 (1, £) + £2з (1, £)=- Ф21 (£ - у r)k£or^21 (У1Л+
+ ^0^ф22 (У1£)] + ^ф22 (Г) -
Учитывая выражение (24) для вектора g(«,£), преобразу-
ем уравнение (28) к виду
гф(л+О=с 2ф(л) + £] £2Р4 Д«оп(й, у ])+Р*2Дивх (и)+Р.3Длнд (и) ,(35)
где
Pi
Й1
Р.2 =
£12 Р £13
„ ’ Г«3 -
£2211 II £23
— столбцы матрицы Р.
286
Описание ППН с помощью разностного уравнения (35)
обеспечивает большие возможности как для их моделирова-
ния на ЭВМ, так и для анализа их свойств [29]. Изложенный
метод составления разностного уравнения ППН по линей-
ной импульсной модели является достаточно общим, при-
годным для различных импульсных ППН.
Собственные значения матрицы С', определяемые из
уравнения
H(X) = det(H-C') = 0, (36)
совпадают с корнями уравнения (6.72).
При необходимости по разностному уравнению (35) лег-
ко находятся импульсные передаточные функции. С учетом
равенств
2{2ф(л)}=2ф(г)=Х2ф(^)ГА:;
к=0
х{гф(и + 1)} = ^z^k + i)z~k = Х2ф("г)г’('””1)
к=0 т=1
Х2ф(/«)г т - 2ф(0)
/я=0
= г[2ф(г)-2ф(0)],
(37)
(38)
где Жф(0) — значение вектора гф(и) в нулевой момент времени.
Определим ^-преобразования обеих частей уравнения
(35). Тогда получим
(zl-С')гфи)=г2ф(0)+ВДРчд«оп(г, Y1)+Р,2д«вхи)+Р.3А‘нД(г) >
Z*(z) = (d - CTX(O) + KX K2P.1z4nfcy1) +
+Р,2л/<1х(г)+Р,зЛ/н.д(г)]; (39)
где
det(?l - C ) = A(z) = z2 - (cn + c22)^ + Cj|C22 — c12c2i- (40)
287
Характеристический поливом
Можно показать, что характеристические полиномы (40) ц
(6.72) совпадают. Согласно (40), (33), (32), (1.11) и равенству
г ( 1 >
а — =- а-—- имеем
L I RC)
а1 “ ~с11 - с22 ~ Р11 + Р22 “ Фц(П _ Ф22СО _
= ^{адт[Фп(Т - уПФн(лП + Ф21 (Т - уТ)Ф12(У1Г)]+
+ ^о[Фц(7’-у7’)Ф21(71Г)+Ф21(Г-уТ)Ф22(у1Т)]}-^1(Т); (41)
а2 - снс22 “ с12с21 - dstФ(7") + detp - Ф) i(T) Р22 - Фгз(^) Ри +
+ Ф1г(^)Р21 + Ф21(^)Р12 = det®(T) + detp +
+^{[ф21(Пф11(7’-уП-ф11(Пф21(7’-уП][^Отф12(у1П+
+ *оф22 (У 1D ] + [ ф12 (Т) Ф21 (Т - у Т) -
-Ф22(Т)ФИ(Т-у Г) ][адтфн(У1Г) + ^оф21(У1Л]}, (42)
где с учетом выражений (1.11)
det®(0 = Фи(0ф22(0 -ф12(Оф21(О = е-2а1; (43)
detp = pHp22 - Pi2P2i =0.
С целью упрощения полученных выражений для коэф-
фициентов характеристического полинома воспользуемся
вспомогательными тождествами, вытекающими из свойств
переходной матрицы,
Ф(/!)Ф(/2) = eA-»(,'+'2) = ф(^ + (44)
т.е.
фп(*1) ф1г(^1) фц(*2) ф1г(*2) фи(11+1г) Фы^+^г)
ф21(*1) Ф22(^1) Ф21(*г) Ф22(*г) ф21(11 +^г) Ф22(А+^2)
288
выполнив перемножение в левой части равенства, получим:
Ф|1(^)Фц(^) + Ф12 (^1 )®21 (^2 ) = Фц(*1 + ^)>
Фц(б)Ф 12(^2) + Ф12 (^1 )^22 (^2 ) = Ф12 (Л +^)>
(45)
Ф21 (Л )Фц (^2 ) Ф22 (^1 )Ф21 (^2 ) ~ ^21(^1 + ^)’
Ф21(^1)Ф12(Г2) + *1*22(Л)<^*22(^2) - *^22^1 + h)-
С учетом тождеств (45) и равенства y-yi=y32 из (41) получим
«1=^[^^ОтФц(Г-Уз27’) + /(ГоФ21(7’-Уз2^)]-2^1(Г)> (46)
ЛФ'-
где функция ^1(0 была введена в §1.1.
Пользуясь (45) и (43), упростим выражения, входящие в
равенство (42):
Ф21(ПФ11(7,-УП-Ф11(ПФ21(7,-УЛ=Ф21(Г-Г?’+УПФ11(7,-УП-
- Ф11(Г -уТ + уТ)Ф21(Т -уТ) = [Ф21(Т - уТ)Фп(уТ) +
+ Ф22(7 - уПФгЛтШЛГ - уТ) - [ФП(Т - уТ)Фц(уГ) +
+ Ф12(Т - уПФ21(уП]Ф21(Г - УП = [Фц(Г - уГ)Ф22(Т - уТ) -
- Ф12(Т - уТ)Ф21(Т - уТ)]Ф21(уТ) = ^2<1-^Ф21(уТ);
Ф12(7)Ф21(7’-уП-Ф22(7)Ф11(Т-7П=Ф12(^-у7’+у7)Ф21(^-уП-
-Ф22(Г-уТ + уТ)Ф11(7’-у7Э = [Ф11(7’-уПФ12(уП +
+ Ф12(Т - уГ)Ф22(уГ)]Ф21(^ - уП - [Ф21 (Т - уГ)Ф12(уП +
+Ф22(Г - уПФ22(уП]ф1 1(Г - уП = [Ф12а - уТ)Ф21(т - УП -
- ФП(Т - уТ)Ф22(Т - уГ)]Ф22(У л = -л2(1’т)Ф22(уП,
где d - е~аТ.
Теперь получим
289
a2=d^+ d^> ^{Ф21(уТ)[адтФ12(у17) + /Гоф22(У1Т)].
- Ф22(уП[ЛЛотФц (пП + ^0Ф21 (Yi^)]} = d2 +
+ ^2<1^)^-{/гб^0т[ф21(У7’)Ф12(у1Т)-Ф22(уТ)Ф11(у1Т)] +
лфь
+ к0 [ф21 (У Т)Ф22 (у 1Т) - Ф22 (УТ)Ф21 (У1Т)]},
где с учетом (45) и (43)
Ф21(УТ)Ф12(У17’)-Ф22(У7)Ф11(У1Т)=Ф21(УТ-У17'+У17)Ф[2(У17,)~
- ФггСг?’ - У1^ + У1ЛФц(У1Л = [ФяСу^ ~ У1ЛФц(У1Л +
+ Ф22(УТ - У17’)Ф21(У17’)]Ф12(У1Т) - [ф21(уТ - У1Т’)Ф12(у]Т) +
+ Ф22(уГ - у^Ф^ПфМпП = ЧФН(У1ПФ22(У1П -
- Ф12(У17’)Ф21(У1Т)]ф22(уТ - У1Т) = -</271Ф22(Уз2П;
Ф21(УПФ22(У1П-Ф22(УПФ21(У1П=Ф21(У7’-У17’+У1ПФ22(У1П-
-Ф22(уТ-у1Т + У1ЛФ21(У1Л = [Ф21(у7’-У1Г)Фи(у17’) +
+ ф22(у^ - У1ПФ21(У1ТЭ]Ф22(У1П - [Ф21(уТ’ - У1ПФ12(У!П +
+ф22(уТ - = [Ф11(У1Г)Ф22(У1П -
-Ф12(у17ЭФ21(У1Л]Ф21(уГ-У1Г) = ^Ф2](уз2П-
Следовательно, нашли второй коэффициент характери-
стического уравнения:
°2 = 6/2 +|^</2(1'Уз2)1^Ф21(Уз2^)- ^^0ТФ22(Уз2^)]- (47)
Используя выражения для элементов переходной матри-
цы (1.11), убеждаемся в совпадении выражений (46), (47) с
(6.70), (6.71).
290
(49)
(50)
(51)
(52)
Дискретные передаточные функции замкнутой системы
Связь выходной переменной системы Аивых(и) с векто-
ром состояния Жф(«) учтем с помощью равенства
Дивьи(») = етЕф(л), (48)
где ет = ||0,1Ц.
Умножая уравнение (39) слева на вектор ет, с учетом (48)
и (37) получаем:
Д^вых(г) = eT(zl - С'Г^О) + Жопи)АС/оп(г,У1) +
+ FKBX(z)Ai/BX(z) + ^нд(?)А/нд(г),
где
к'""<г>=^йы=ЛЛге’(г1-с')"р-‘;
^х(г) = д/Г!? = ет(а - с')"1Р.2;
V ВХ \Л/
Ш Н.Д W
под Аб/ВЬ1Х(г) в равенствах (50) - (52) подразумеваются
^-преобразования составляющих изменения выходного на-
пряжения, вызванных изменениями опорного и входного
напряжений и дополнительного тока нагрузки.
Выражения (50), (51) должны совпадать с (6.60), (6.61).
Рассматривая выражение (52), обратим внимание на то, что,
как было отмечено, из равенства (6.62) передаточная функция
для дополнительного тока нагрузки не может быть получена.
Поскольку элементы матриц С' и Р определены соот-
ношениями (32) - (34), выражения (50) - (52) вполне при-
годны для вычислений. Использование равенств (50) - (52)
упрощает то, что их правые части отличаются только про-
стыми векторными множителями P*j, Р*2, Р*3. Общей для
правых частей является матрица eT(zl-C') 1. В отличие от
291
(50)-(52) формулы (6.60)-(6.62) еще не пригодны для вычис-
лений, поскольку предварительно необходимо определить
входящие в них ^-преобразования и упростить получающие-
ся в результате этого выражения.
Найдем общую для (50)-(52) матрицу:
л(г1-С')-<— *-----Л||0Д|||г /22 С'2, || =
det(zl-C') с21 г-СцЦ
= ^)IC21’Z-C“II’ (53)
где полином A(z) = det (г! - С') определяется выражением (40).
Тогда передаточные функции (50)-(52) преобразуются к виду
^onU) =
^1^2P21(z ~ Zp on ) .
Az)
^bx(z) =
P12 (^ ~ ZQbx ).
Az) ’
P2i[z ~ ^0А>„д )
Az)
(54)
(55)
(56)
где нули передаточных функций
Zoon ~cii C2i 11 > £овх — си c2i Zoki — Сц — с21 (57)
Р21 Р22 НЛ Р23
7.2. Понижающий импульсный преобразователь
в режиме прерывистого тока
Анализ импульсной системы с четырьмя импульсными
элементами, работающими синхронно, но несинфазно
(рис.4.22), при использовании традиционного метода, осно-
ванного на ^-преобразовании, представляет собой большие
трудности. Поэтому представим ее как четырехмерную ли-
нейную импульсную систему (а при учете влияния А/н д -
как пятимерную). Тогда линейной импульсной модели в ре-
жиме прерывистого тока (рис.4.22) соответствует разомкну-
тая импульсная система, показанная на рис.7.2.
292
Выбирая в качестве вектора состояния линеаризованной
системы /ф - ||Д/£, Лис ||т, для разомкнутой импульсной сис-
темы получаем уравнение (2), в котором вектор входных
сигналов НЛЧ ¥(Г) = , у2, у3, у4 ||т, а матрица
1111 1 1
нф qo о о о||
(58)
При nT<t<(n+e)T, 0<е<1 имеет место равенство
Y(r) = S(r-«T-E)f («,£), (59)
формально совпадающее с (7), однако в данном случае век-
тор входных сигналов разомкнутой импульсной системы
f (и, £) = || Аиу (и, у 1 - 0), Д ивх (и), Aii (и, V т - °) > д«с («Л т - °) || i (6°)
S(Z - Е) = diag- yT),S2(t),S3(t - yTT),S4(' - УтТ)]; (61)
Ут = (Ф +tc)/T;
Го ~ длительность включенного состояния регулирующего
транзистора; tc — время спада тока iL; функции S^f) и S2(t)
совпадают с (6);
S3(t) = -L6(t). (62)
293
Согласно (4.82)
ад =4М<)
о
= e~4RC при 0 < t < Т - t0 - tc,
при Т-t0 -tc<t<T и t<0 .
(63)
Еще раз обратим внимание на то, что момент фиксации
сигнала Аиу(0 сдвинут на время щ Т по отношению к момещ
ту включения регулирующего транзистора, а из-за наличия
звена с чистым запаздыванием е~р*31 импульс Si(0 сдвинут
на время уТ >у{Т.
В данном случае остается справедливым уравнение ра-
зомкнутой системы (11)
гф (п, е) = Ф(е, Т)гф (и,+0) + R(e, E)f (и, Е),
в котором, однако, матрица R(e,£) имеет иное выражение:
,р£) = Rn^E) Rn(t,E) R13(e,E) Л14(e,E)II =
7?21(e,£) R22(e,E) 7?23(e,E) Я24(е,£)|
eT
= |Ф(еГ - ц)В'н ф8(ц - E)dr]. (64)
о
Поскольку
R' Чг ft 1р1(п-?П S2(t) S3(t-yTT) S4(t-yTT)\\
B,,„S(n-£) = z| „ „ Q Q
из (64) получим:
1 eT
ь о
1 еТ
Rn(E,E) = -r ]Фп(е7’-ц)5,2(г))с?л;
ь о
1 еТ
Ri3(s,E) = -- |Фи(еТ-ц)£з(п-
7 о
1 еТ
Ri4(e,E) = ~- |Фи(£Т-n)S4(n -yTT)dx];
L о
294
1ZT
*2ife E) = у Гф21(еТ - - y7>;
L 0
1eT
Rn&E) = у |ф2|(е7’ - ^>t];
(65)
Я23(е,E) = | P>2.(eT - n>s3(n - уттШ
L 0
1eT
R24(E,E) = y (Ф21(еТ -т])54(т]-угТ)^-
L о
Следующие интегралы были найдены при рассмотрении
режима непрерывного тока (выражения (14), (15), (19), (20)):
0 при 0 < е < у,
/гп(Е,£) = ^
О Т?ГТ
^Ц^-Фн(е7-уГ) при у < е < 1;
0 при 0 < Е < у,
7?21(е,£) = . V FII ф21(еу_уУ) при у Е < 1; (66)
/?i2(e,E) = при 0 < е < у, ^ФИ^Т) - Ьф11^Т - уТ) при у < е < 1;
7?22(е, Е) = Ьф21^Т) при 0 < Е < у, ЬФ21&Т) - Ьф2Х(еТ - уТ) при у<Е<1.
На основании равенств (65) и фильтрующего свойства
Дельта-функции, поскольку результат действия дельта-
импульса не может появиться раньше момента его приложе-
ния, получаем:
гТ
^з(е,Л)=- |Фи(е7-71)5(т]-ут7)^=
о
0 приО<Е<ут,
-Фц(еГ-ут7) приут<с<1;
(67)
295
ъТ. fO ПриО<Е<ут,
/^з(е,£)=- [Фп(еТ-т1)3(п-ут7)<Й]=] (68)
о [-Фц(еГ-ут7) приут<Е<1.
Остальные два элемента матрицы R(e,£) определяются с
учетом равенств (63) и (65):
Д4(е,£)=| pM^-Wn--yT7)^j
У^Г
, еТ-утТ , гТ-утТ
=1 [фп(еК(ЕГ“УтГ^/Л<7©=1 е^Е7’“Ут7")/ЛС [фи(е)ЛЛС/Й;
L о о
гТ еТ <69)
^4(е, £)= |
yj ъТ
i еГ-7тТ’ . еТ-утТ
=-J /Ф21(еИЕГ-^-е^с<©=|е--(ЕГ-^ЛС fayeje^d).
L о L о
Вывод вспомогательных соотношений
Для произведения квадратных матриц А(/) и В(/) спра-
ведливо равенство
t/(A(Z)B(Z)) = у/А(/)В(О + A(/)JB(O,
откуда, если матрицы перестановочны, получается формула
интегрирования по частям:
f A(Z)</B(O = А(ОВ(О - ]В(О</А(О. (70)
На основании формулы (70) с учетом выражения
Ф(О = еАнф/ имеем
|ф(Г)е'/7,-ь»Л = Тп в |еАнф'//(е,/гпв 7пве//гПВеАн.фг _
- TD, fe'/r°Bd(eA“-*')= Т^е1^ - Т^А^
Полученное равенство можно переписать в виде
(1 + Гп.вАн.ф)|еА”ф'е,/г-Л = Т^е^е^,
296
откуда
;.в//7'-(1 + 7’п,вАн.ф)-1Ф(0.(71)
С учетом выражения (1.3) найдем:
1 ^п.в^н.ф
1 _ т —
пв L
Тпл
С
det(l + 7пвАнф)= 1 - Тпв
1
RC
т
_ П-В
L
т
| _ П-В
L
\ у-2
I П-В
J LC
ЬГ
г
L
В частности, для случая Тп В=АС имеем:
J?c(l + ЛСАдф)"1 =
О с
-£ L-rC
Подставляя это выражение в (71) при Тп ^=RC, получаем:
|ф(/)е,/ЛС^ =
(73)
=еЧ*с
СФ22(О
сф21(0
-£Фц(/)
Ф21 (О
-ЛФ12(О+
f4-><H2(')
К J
откуда, в частности, можем записать:
/фп(/)е'/ЛСЛ = Се,/ЛСФ21(/);
[Ф21(0е'/ЛС^ = -Let/Rc <Dn(t) +
-гС е'/лсФ21(/)
(74)
L
R
297
Из (69) с учетом равенств (74), <J>2i(0)=0, Ф1((0)=1 будеК(
иметь:
* ее-^-’Лке=^Ф11(0)|’“Г-'’Г .
Л24(£,£)=е
= f Ф21(еТ - утГ) = -Ф12(бТ - ут7);
1s
Г / 1 Г -\^т-УтТ
,-(Е7--Ттт)//гс _ ее/лсф| i (0) + 1 _ r С
{R L
= -Ф11(е7-утГ) + Г|-4
-Ю
Ф21(еГ - ут7) + е-С^-тгП/лс
Учитывая выражения для элементов переходной матри-
цы (1.11), выполним тождественные преобразования
1
1 С
<B0C^jR L
г Ifl CYI ,Л ,
Гс Ггт1 о‘ю=ч
П1(0-^(/)-Га-7^ =
к L) a>Q
\ .Л V/ COg
С/Л 1Г Г 1(1 CYI
=-^i(0----а~7"г »~г7 О|
o0L 1 С(д LJ
Следовательно,
О при 0 < е < ут ,
- Ф12(е7 - ут7) при ут s е < 1,
ГО при 0 < Е < ут ,
|е-(еТ-утГ)/ЛС _ ф22(ЕГ _ УтГ)
при ут < Е < 1.
Д4(е,£) =
^=-Ф22(/).
(75)
^24 (е, 2?) _
Равенства (75) были проверены непосредственным опре-
делением интегралов, входящих в (69), с использованием
выражений для элементов переходной матрицы (1.11).
Матрица R(e,£), а следовательно, согласно (И) и вектор
2ф(«,е)> имеют разрывы непрерывности при Е=у и е—ут, но не
имеют разрыва при e=yi.
Для замкнутой системы с учетом (22) в уравнение (11)
нужно подставить
f(n,£) = g(«,£) - К12ф(и,у1) - К22ф(л,ут-0), (76)
298
где
К1К2^иоп(п, yj) Х11 Х12 0 0
Aw„v (л) 0 0 0 0
^,Е)= > К] — 1 0 0 о ’Т II CN
0 0 0 0 -1
Хп=К1£дт; xi2~В результате получим соотношение
гф(л,Е) = Ф(еГ)7ф(п) + R(e, E)g(n, Е) -
- R(E,£)fK^(n,y,) + К22ф(И’ут-°)]>
определяющее процессы в замкнутой системе на интервале 0<е< 1.
В связи с тем что согласно (66) £п(у1,£) = О,
£21(У1,£) = 0, то произведение матриц R(yb£)Ki=0.
Поскольку в соответствии с (67), (68), (75)
Лз(Г1,£) = Е23(у1,Е) = 7?14(У1,£) = E24(7i,E) = 0, то произведе-
ние R(y4,£)K2=0. Поэтому, подставляя е ~ уу б (78), получаем:
гф(л,У1) = Ф(у1Т)2ф(и) + R(yi,E)^n,E). (79)
Вследствие равенства нулю значений /?]3(ут,£),
Е23(ут~Е), /?14(ут,£), £24(ут,£) также имеем
R(yT-0,£)K2 =0. Поэтому подстановка е = уг в (78) дает
хф (и, ут - 0)=Ф(ут7>ф(л)+R(yT - 0, £)g(«, £) - R(y т - 0, £)KjZ$ (л, у().
Отсюда с учетом (79)
гф(и,ут-0) = [Ф(утП - R(yT-0,£)K^(y1T)]z$(W) +
+ R(yT - 0, £)[1 - K1R(y1, £)]g(n, £),
где
R(yT-0,£)K,
*ii(yt-o,£)
£21(ут-0,£)
Л2(7т-0,£)
Е22(Ут~®’ Е)
Х11
о
о
о
Х12
о
о
о
0 0
0 0
|Х11£н(ут-0,£) Х12£п(ут-0,£)||
I|X11^21(Yt~0»-^) Х12^22(Ут-®’ Е)\
299
Ф(Ут7’)-К(ут-0,Г)К1Ф(у1Т) = ц = |И11 И12|; (8п
IIH21 M22II
Ml 1 =Ф1 1(У>^-Х1Л1(Ут -°, -Е)Ф11 (Yi?) - Xl 2^i 1(Yt-0, jE)®21(Y17);
H12=<MytD -X11Д 1(YT - О, £)Ф12(У1^О - X12^L i(yt-o, £)Ф22(у17);
(82}
H21 =^21(Yt^)~X1 1^2 1(Yt -O> £)Ф11(Y1^O - X12^21(Yt ~®> £)Ф21(Х17);
M22 =Ф22(Хт'О -Xi 1^2i(Yt_0> ^)Ф12(У17)-X12^21(Yt-0, ^)Ф22(У1^)-
(83)
Подставив выражения (66) при с=ут-0 в формулы (82), с
учетом равенств
v _ TFU^ _ TFvv
L Х11 ЬипК^ КфЬ^01’
FMFUm 7 FUBX к TFvl „
~~LT ^ - ~LU^K^K1 - 1^LK°
получим:
Mli-<I)ii(YT^)-’^"y^ii(YT^-Y7)[^^Or<J)ii(Yi^)+^o<J>2i(Yi?)];
ЛФЛ
м12=Ф12(утП-^4Фц(ут7’-уП[^ад2(Х1Л+А0Ф22(у1П];
ЛфЬ
(84)
M21 =<D21(Yt^) 77^Ф21(Ут^^^[^^Ч)тФ11(У1^) + ^оФ21(У1Т)]‘>
ЛфЬ
М22 -Ф2г(Ут^) 7^7 ®2i(Yt^_yF)[/^А'&ГФ|2(У17)+А'0Ф22(у17)].
ЛфЬ
Сравнивая (84) и (32), замечаем, что выражения (32) для
режима непрерывного тока являются частными случаями ра-
венств (84), соответствующими ут=1.
Возвращаясь к равенству (80), с учетом (66)-(68), (75)
находим:
0 *ф11(У1Л 0 0
0 ^2i(Yin 0 0
Х11 Х12
K1R(y1,£) = 0 0 0 0
0 0
300
0 Хп6ф11(Г1ЗГ)+ХЕ&ф21(Т17’) О °
О О О О
О О О О
О О О О
1 - Х11^ф11(У1^)_ X12^j>21(YrO 0 0
1-К^(У1,Е) = 0 1 0 0
0 0 1 0
0 0 0 1
Гп
^21
Г12 Г13
^22 Г 2з
ГМ
Г24
= R(yt-0,E)[1-K1R(yi,E)] =
(85)
/?21(Ут-0,Е) 7?22(Ут-О,Е) О О
[1-К^(У1,Е)] =
^i(yt-O,£) -Еп(Ут-0,Е)[х11йф11(У17)+к12г’ф21(У17)]+А12(Ут-0,Е) О О
^21(Yt“0>E) -Е2](Ут-0,Е)[х11/’ф11(У1'Г)+Х12^ф21(У1Л]+Е22(Ут-0,Е) О О
Принимая во внимание выражения (81) и (85), равенст-
во (80) запишем в виде
2ф(«, Ут~°) = Н^фО?) + Tg(«, Е). (86)
Подставив выражения (79) и (86) в (78), получим урав-
нение:
гф(л,Е) = [Ф(£П - Rfc^Ж1Ф(У17’) - R(e, Е)К2р]гф(л) +
+ R(e, Е) [1 - K,R(Yi,E) - K2r]g(«, Е), (87)
описывающее изменение вектора состояния на интервале
времени 0<е<1.
301
Найдем входящие в (87) выражения:
R(e,£)K10(y1T) =
= R(e,£)
Х11Фц(У1^)+Х12Ф21(У1^) ХцФ12(УрО + Х12Ф22(УгО
О о
о о
о о
Л1(Е>^Х11Ф11(У1^+Х12Ф21(Т'17)] Л1(Е>£)[Х11Ф12(У17)+Х12Ф22(У17)]|
I ^(e^IxiAiGi^+Xn^ifri7)] Лп(Е^[Х11ф12(У1£)+Х12ф22(У17)]1|
О
О
R(e, £)К2ц = R(e, £) °
Мп
Й21
И 12
И 22
-1
О
О
О
о
о
/?п(е>£) £12(е,£) £13(е,£) £14(е,£)
^2l(e>-^) ^22 (ej£) ^23 (е»-£) ^24 (Е>
R\ 3 (е> -£)и 11 + ^14(е,^)М21
^23 (Е> 1 + ^24 (Е, -^)й21
012
О 22
^13^ ^)Н12 +^14(Е’-^)|122
^2з(е> -^)М12 + ^24(Е> ^)Н22
Mil
М-21
о
о
К2Г =
-1
о
о
о
о
-1
Гн
Г21
Г]2
Г 22
О
О
Гц
Г21
О
о
Г12
Г22
о
о
о
о
О
О
О
О
1-К^У1,£)-К2Г =
1
о
Гц
Г 21
~Х1 А>11(У1^Г) “Х12^ф21(У1^Э
1
Г12
Г22
о
о
1
о
о
о
о
1
- (90)
О о
о о
302
Полагая в (87) е=1, получаем разностное уравнение
замкнутой системы
гф(и +1) = С'гф(и) + Pg(n, £), (91)
где
С' =
сп
С21
, = Ф(Т) - R(l, £)K^(Y1n - R(l, £)К2р ; (92)
с22||
P = R(l,£)[l-KlR(y1,£)-K2r] =
Pll £12 £13 £14
Р21 Р22 Р23 Р24
-(93)
Подставляя в (92) выражения (88) и (89) при е=1, находим:
СП = Ф11(П - Л1(1^)[Х11Ф11(Г1^) + Х12Ф21(У17’)] +
+ £13(1, £)ри + 7?i4(1, £)ц21 ;
с12 -ф12^)“ ^11(1» Ш1Ф12(пП + Х12Ф22(71^)] +
+ ^13 (1>-^)Ц12 + ^14 £)Р-22 >
С21 “ Ф21СО “ ^21(^^)[Х11Ф11(У1^) + Х12Ф21(У1^Я +
+ £2з(1, £)цц + £24(1,£)р21 j
с'2 = Ф22(Г) - £21(1,£)[Х11Ф12(У1Т) + Х12ф22(У1П] +
+ ^2з(1’^)й12 + ^24(1> ^)Н22
Учитывая соотношения (66)—(68), (75), (76) при е=1 и
равенства (83), (84), преобразуем полученные формулы:
с[, = фн(Т) - ф11(т - уТЯхцФнСиП + Х12ф21(иП1-
- ФП(Г - ьПин - ф12(Г - УтПР21 = фп(П -
- ФП(Г - УтТ)Ф11(УтГ) - ф12(^ - утПф21(УтП +
+ + лъф21(у1Т’)][- Фи(Г - УТ) +
Лф£
+ фи(£ - Ут£)Ф11(ут7' - уП + ф12(Г - утПф21(ут7’ - уП];
303
с12 = Ф12С0 5<~£_?ХФц(7’ - Y^)[X11®12(y1^) + Х12Ф22(У1^)]^
- Фц(7" - Yt^)M12 “ Ф12(^ - Yt^)P-22 - Ф12(^Э -
- ФИ(Т - утГ)Ф12(утТ) - - YTm22(YTD +
+ + ^оФ22(У1П][- Фц(Г - yD +
+ ФП(Г - утПФц(Ут7’ - YT) + Ф12СГ - YTn®21(YTr - У Л];
4=Ф21(П-^^Ф21(^-уП[Х11Фц(у1П + Х12Ф21(у1П]-
- Ф21(Г - утГ)Нн + |<<7’-^С - Ф22(Г - утТ)]И21 =
- Ф21(Л ~ Ф21( _ УтЛФц(УтЛ “ Ф22(^ ~ УтЛФг1(УтЛ +
+ ~[ЯЛФ11^П + *ОФ21(У17)][- Ф21(Т -уТ) +
+Ф21(Т-утПФ11(утП+Ф22(^-утт21(хт7’-уП]+ечг^/лсц21;
С22 = ф22(П - ^^Ф2) (Г - уТ)|%пФ12(У1П + %12Ф22(У1П1-
-Ф21(Т-утТ>12 + [е (^^Г)'ЙС - Ф22(Г -утТ)]ц22 = Ф22(Г) -
- Ф21(Т - утТ)Ф12(утГ) - Ф22(Т - утПФ22(утЛ +
+ ^7 [/?б^Ф12(У1П + ^0Ф22(У1ЛИ- Ф21 (Г - уТ) +
лф^
+ Ф21(^ - утГ)Фи(утГ - уП + Ф22(Т’ - утГ)Ф21 (утТ - уГ)] +
+ е-(т-7тг)/ЛсМ22
Равенства (45) позволяют существенно упростить выра-
жения для элементов матрицы С', а именно, получить:
сп ~ сп =0; (94)
304
C'2l = = е-^да{ф21(УтП -
- ^-Ф21(ут7’ - + ^оФг^пП]!;
4 . e-<r-^s%2 - ^(фи(УтГ) -
- ^Ч>а(Г,7 - уТ^КлФ12(у,Т) + Л„Ф2.(„7')1 -
Перейдем к определению элементов матрицы Р. Соглас-
но (93) и (90) имеем:
Рп = /гп(1,£)+ад>£)гп + адя)г21;
Pl2 = -Лп(1.^)[хп^ф11(У1?Э + Х12*ф21 (Г1Л] +
+ ^i20>^)+ ^в(1>^)Г12 + -^14(^^)Г22;
Аз - ^13 (ЪЕ)г Р14 = ^м(1>^)з
J?21 = -^21 (1>^) + ^2з(1>^)Гц + ^24(1>£)Гг1 >
Р22 = ~^21 (i,£)[xnWnn + Х12^Ф21(?1^э]+
+ ^22 (У Е) + ^2з(^^)^12 + ^24(1>^)Г22 >
Р?3 ~ ^2з(У^У’ Р24 ~ ^24(1>^)-
Поскольку согласно (77) две координаты вектора g(«,£)
нулевые, в уравнение (91) входят только четыре элемента мат-
рицы Р: рн, р12, Р21 и Р22- Преобразуем выражения для этих
элементов с учетом (66)-(68), (75), (85) и равенств (45). Найдем
рп = /?„(!,£) + A13(l,£)7?n(YT-0,£) + /?I4(l,£)7?21(yr-0,^) =
= ^вх [ф11(Г _ у7) - ФП(Г - ?тГ)Фп(Ут7 - уТ) -
-Ф[2(7’-Ут7’)Ф21(Ут7’-уП]=0.
Для преобразования выражений для р12 и р22 воспользу-
емся доказанным в §1.1 матричным соотношением
Фп01)Вф(А) = Вф('1 + h) ~ Вф(Л), (97)
305
откуда следует
ФнС^Х’фН^г) + Ф]2(Л)^ф21 (^з) = ^ф1 i(ri + *2) ~ ^ф11(Л)>
Фц(М^ф1г(^з) + Ф1з(?1 )^фзг(^г) ~ ^ф1з(6 + ^з) _ ^ф1г(^1)>
(98)
Ф21(^1)^ф11(^2) + Ф22(^1 )^ф21 (G) - ^ф21 (G + ^з) ~ ^ф31(^1)’
Ф21(*1 )^ф!з(^з) + Фзз(?1)^ф2г(^з) - ^ф22(^1 + ^з) ~ ^фггСЛ)-
Получим:
*12 ~ ~*11С>*)|Х1 A>h(Y1*) + Х12^ф21(Т1^)1+ *i2(l>*)_
- ЛзО. ^){^и(тт-0,jE^Xu^nGiT) + Х126ф21(У1Г)]- *i2(yt-0,*)}-
- + xu^iCyiD]- *22(ут-о,£)}=
= адг) + ад*)*12(ут-о,£) + ад £)*22(Ут-0, Е) -
~ [хн^ф! 1(У!П + Xi^yiCYi^llXiClj^) + ^\з(Х>Е')Кх1(ут-О, Е) +
+ R^l,E)R2i(yT-0,E)] = ЬфП(Т) - Ьфп(Т - уТ) -
- Фц(Т - УТ7)ЛФ1 !(УТП - Ф12(Г - утТ>ф21(утП +
+ ФцСГ - У.ТуЬф^Т - уТ) + Ф)2(Г - УтТ)&ф21(утГ - УТ) -
- [х! 1*ф11(У1П + Х12*ф21(У1П]^Ц^[Фи(Г-утП -
- Фп(7’ - утПФц(утг - УП - Ф12(Г - утПФ21(утг - уП]=0.
Аналогично
Р21 = *21 (1. *) + *23 (1. *)*11 (ут -0,£) + *24 (1, *)*21 (ут - о, Е) =
= !Ц£вЦф2[(г _ уП_ ф21(Г _ УтТ)ф11{Утг - уТ) -
I JLj
; - Ф22(Т - утПФ21(утГ - УТ) + е-<г-^Г)//гсФ21(УтТ’ - уГ)] =
= ^м^вх.е-(Г-гтГ)/кСф2) (Утг _ у7); (99)
306
Pri = Я22(1, Е) + Е23(1, Е)Е12(У1 о, Е) + Я24(1, Е)Е22(ут -О, Е) -
- [хп^ф11(У1^) +Х12^ф21(У1^)]1^2|(^ Е)+ E23(l,E)En(yT-0, Е) +
+ Л24(1,Е)Е21(ут-0,Е)] = йф21(Т)-йф21(Г-у7)-
- Ф21(Г- утГ)[^фп(ТтЛ - *фц(УтЕ - уЕ)]-
- Ф22(Т-утТ)[лф2|(утТ) - 6ф21(утГ - уП] - ^~Ч1>«у^+
+ Х12*ф2i(YiП][Ф21 (Т -уГ)- Ф21(Т - утПФц(утГ - у Т) -
-Ф22(Т-у7ТУ^Т-у^
- МФ1 г(У1П + ьЫуА (утг - /4 =
J
= e~(T-y^,RC{b^r) - 6ф21(утТ- у Т) -
- ^[R^K^b^T) + ^ф21(У1Л]Ф21(утГ - уТ)1 - (100)
лфь
Таким образом, гД - cj2 = 0, рн = р12 = 0. Из двух урав-
нений, эквивалентных векторно-матричному уравнению (91),
первое вырождено, а второе с учетом условия Д4(л)=0 имеет
вид:
Дивых(« + 1) = с22Дивых(п) + ^1^2Е21А«оп(^У1) + feAwBx(«) Л101)
Перейдя к относительным величинам, получим:
Дх2(и + 1) = ZjAx2(h) + D/S.U + EjAv!, (102)
Где :х2 =иВЬ[ХДЕф?/б), и — иопДЕфЕдЕ5^, Vj—UgX/t/g , Z\ —с22
корень характеристического уравнения замкнутой системы;
D = КЛКХК1Р2Х = _^^-е-9(1-^)Г/^Й21(Уттп -Утп); (103)
л/ЙС Лф<7б
Д - Егг/^ф
(Ю4)
307
7.3. Исследование динамических характеристик преобразователя
в режиме прерывистого тока
На основе полученных соотношений разработана про-
грамма расчета характеристик ППН в режиме прерывистого
тока. Программа состоит из процедур, реализующих: 1) рас-
чет элементов переходной матрицы фильтра А(т) по форму-
лам (1.42); 2) расчет элементов матрицы В(т) по формулам
(1.43); 3) расчет координаты х2Лг неподвижной точки отобра-
жения при заданных длительностях с0 = тс =/С/Тф
интервалов включенного состояния регулирующего транзи-
стора и спада тока дросселя фильтра по формуле
„ _ М(^оЛс)и + -МгС'оЛс)*'?
получающейся из (161); 4) определение значения тОгр, соот-
ветствующего границе режима непрерывного тока при за-
данных значениях Qo, q, q5, -JbC/T', 5) расчет левой части
уравнения (1.60) при заданных т0, тс; 6) решение уравнения
(1.60) относительно времени спада тока тс при заданном то,
что осуществляется изменением тс с выбранным шагом Лтс,
обращением к предыдущей процедуре при каждом значении
тс, определением интервала (тс, тс+Атс), в котором находится
корень тс, и уточнением корня методом Мюллера; 7) расчет
левой части уравнения (4.39) при заданном значении
Т1=то+т31-т32; 8) решение уравнения (4.39) относительно -ц
при заданных значениях параметров схемы и внешних воз-
действиях и, vb что осуществляется определением интервала
(ть tj+Atj), в котором находится корень, изменением -ц в
интервале (0, тОгр+тз1-тз2) с выбранным шагом Лт( и вычис-
лением левой части уравнения (4.39) при каждом значении
•И путем обращения к предыдущей процедуре, после чего
производится уточнение корня методом Мюллера; 9) расчет
по формулам (96), (103), (104) значений Zi, D, входящих
308
Р уравнение (102); 10) решение нелинейных уравнений
у(х)=0 методом Мюллера. Этот метод заключается в том, что
росле определения промежутка (хь х3), в котором находится
корень, вычисляется значение функции /(х2) при х3<х2<х3,
функция /(х) на указанном промежутке интерполируется па-
раболой F(x) по трем точкам (хь/(х,)), где /=1,2,3. В качест-
ве очередного приближения корня берется значение, опреде-
ляемое по формуле решения квадратного уравнения /’(х)=0,
находящееся в интервале (хь х3), после чего интервал изоля-
ции корня сужается и снова проводится парабола через три
точки и т.д. Для определения корня с точностью 10'6 требо-
валось всего несколько итераций.
В главной процедуре путем обращения к перечисленным
процедурам организуется расчет характеристик ППН. Снача-
ла определяется TQrp, затем значения ть to=ti-t3i+t32 и тс.
После этого рассчитываются: координата х2Лг неподвижной
точки, максимальное относительное значение тока ximax,
значения Zj, D, Д.
Некоторые расчетные зависимости для (?0=10;
q = qb = 0,05; Vj = 1; y3j = 0; Ko = 40; АГОт = 0 представлены на
рис. 7.3, где сплошные линии соответствуют отсутствию за-
паздывания, штриховые линии — относительному запазды-
ванию уз2=0,1. Как видно, при изменении постоянной вре-
мени фильтра JLC/T фактор пульсаций F изменяется в ши-
роких пределах. Корень характеристического уравнения Zi
может принимать как отрицательные, так и положительные
значения, но нарушение устойчивости обычно происходит за
счет его перехода через значение zi=~l.
Для Qo=lO; Q =Чб - 0,05; Ко - 120; А0т=2; и = 0,6;
И = 1; -JLC/Т = 4 расчеты по точным соотношениям дают:
=0,492040; 0=0,497922; =-0,0416452.
Уравнение динамики (102) при Av2=0 можно переписать в виде
Дх2(и +1) = zi&x2(n) + А'уО - ?1)Аи(п) + Ав!(1 - гОАгДи), (105)
309
где
- _ D
У 1-7
1 Z1
(Ю6)
— коэффициент передачи управляющего воздействия;
= 1“ (1И)
— коэффициент передачи возмущения.
Поскольку согласно рис.7.3 коэффициент Ку остается
близким к I, то при Zi >l ухудшается управляемость замкну-
той системы.
Уравнение (105) соответствует дискретному апериодическому
звену, свободное движение которого описывается уравнением
Дх2(и) = Ctz”,
(108)
310
еде С\ ~ коэффициент, определяемый начальными условия-
ми- При ?i>0 это уравнение представляется в виде
Дх2(И) = С1(е~г/ГэУ'. (109)
Отсюда видно, что при zi>0 дискретное апериодическое
звено можно заменить эквивалентным непрерывным с по-
стоянной времени
7э=-Т/1п|^|, (110)
а время установления переходного процесса
/усг= 2,257'. (111)
В случае zi<0 дискретная переменная Лх2(и) поочередно
принимает положительные и отрицательные значения, сов-
падающие с экспонентой (109) лишь один раз за два перио-
да. В этом случае параметр Тэ указывает на одинаковую ско-
рость затухания переходного процесса дискретного и непре-
рывного звеньев (40].
Для оценки реакции ППН на гармонические входные
воздействия можно использовать псевдочастотные характе-
ристики, получаемые из уравнения (105),
Жу0Х) = ^у1=-^;1ГвДА) = /Св1Ь^2, (112)
где согласно рис.7.3 постоянная времени замкнутой системы
в режиме прерывистого тока
при £i>0 мало отличается от Тэ, а при ^<0 отличается суще-
ственно. Это еще раз свидетельствует о невозможности за-
мены ППН эквивалентным непрерывным звеном при zi<0.
На рис.7.4 представлены рассчитанные по формуле (112) ам-
плитудно-частотные характеристики для £)0=10; ^=^6=0,05;
4lc/t= 5; Vj=l; у31=Уз2=0 и экспериментальные точки
ДЛЯ ^о=4О; К()т=0, Ь2=°(00); А'ог=0,1, уз2 = 0(оо) ;
311
КОт = О,1, у32=0,1(йд) ; x* = 7/./2 — относительная псевдочас.
тота. В эксперименте по оси частот откладывалась обычная
круговая частота <в.
Равенства zi =
' ^22 = 1 И Z] — ^22 = ~ 1
дают соотношения,
связывающие крити-
ческие значения па-
раметров, соответст-
вующие границе ус-
тойчивости. На рис.7.5
приведены расчетные границы устойчивости ППН в режиме
прерывистого тока для
Со=°°; ^=^б=о,о5;
vi=ij Уз1=Уз2-0; кОт=о
и экспериментальные точ-
ки для м = 0,3; КОт=0,
У32=0(°°); К0т=0,1,
Уз2=0(хх); К0т=0,1,
уз2 =0,1 (со) . Показана
также расчетная граница режима прерывистого тока (—).
7.4. Вывод линеаризованною разностного уравнения инвертирующего
преобразователя по линейной импульсной модели
Вывод разностного уравнения по линейной импульсной
модели (рис.4.26) изложен в работе автора [41]. В отличие от
понижающего ППН в режимах непрерывного и прерыви-
стого токов (§7.1—7.3) в данном случае из схемы на рис.4.26
выделяются и рассматриваются две разомкнутые импульсные
системы. Сначала рассмотрим импульсную систему, образо-
ванную звеном G(p) и присоединенными к его входу им-
пульсными элементами ИЭ1—ИЭ4 (рис.7.6,а), где, однако,
312
идеальные импульсные элементы ИЭ2 и ИЭЗ фиксируют
значения сигналов Д/£(л,у+0), Д«с(и,у+0) после скачка, вы-
званного элементом ИЭ1.
Звено G(p) на рис7.6,с описывается уравнением
+ у(У1 + У2 + Уз + УД
at L L
решение которого есть
-Г (t-пТ) ‘г --(t-пТ)
= е 1 &iL(nT)+ fe L В[У(т)(/т, (114)
пТ
где
Bj=y||l 1 1 y2 y3 y4||T. (115)
На интервале иТ<г<(и+1)Т справедливо равенство,
аналогичное (10),
у'(0 = S'(r - пТ - £)f(n, £), (116)
313
где
S'O- - Е) = diagfoa - уТ), S2(t - уТ), S3(t - уТ), ЗД] (117)
— диагональная матрица весовых функций формирующих звеньев;
^i(O - [^вх + Mc(^i)R(O;
[~ф21(0 ири 0 < t < T-t0 ,
^2v) I _
О при Z<0 и T-t0<t<T;
[-Ф22(О при 0 < t < T-t0, (118)
v) — ’
О при 7<0 и Т-t0<t<T-,
1 при 0 < t < tQ,
n
О при t0 <t <T;
f(n,E) = Цд^и^), А*£(п,У!), Дис(и,у]), Д«вх(«,У1)|Г (И9)
— вектор входных сигналов разомкнутой системы.
Подставив выражение (116) в (114), введя относитель-
ный временной сдвиг 0<е<1 так, что sT=t-nT, и новую пе-
ременную ту=1-пТ под интегралом, получим:
Д/£[(и + е)7’] = ЛФ1(еТ)Д/£(пТ) + R'(e, E)f(n, Е), (120)
где йф1(О = е"'‘,/£;
R'(b,£) = ||/?1(e,£), R2(e,E), R3(e,E), ^(e,£)|| =
= EfAtd(ET-ri)B1s'(i1- rn; (121)
0
Rlfe£). _ гГ)Л1 _
L 0
c T r r
(122)
L I * L
При У<Е<1.
При определении следующих двух интегралов:
t -L[sT-4)
= 7 е 1 S’An - fT)dri, /=2,3, у<Е<1,
La J
о
314
учтем, что согласно (118) 5;(р - уТ) = 0 при г) < уТ. Поэтому
1 еТ -L( т- 1 1 г-
RfaE)=\ [eL': S^-yTid^e^ ~у Рг6/£^(еие.(123)
L JLj •
уТ О
Задача сводится к определению интеграла произведения экс-
поненты и элемента переходной матрицы Ф(0-
Вспомогательные соотношения
Для определения интеграла, входящего в выражение
(123), воспользуемся соотношениями (71) и (72), где примем
7],.в = L/r. При этом det(l + ТпвАнф) = L/(r2C);
1
г
О
^(1 + ТплЛн.ф) 1
1——
rRC
L
гС
rC-~ С
R
-L О
l г2£
г L
Тогда
Ф(г)ег'/£Л = er,'L
rC-^г С
R
-L О
Фц(О
Ф2] (t)
Ф12(/)
Ф22(О
откуда
^xx(t)er,’Ldt = er,'L
гС-4]фи(О + СФ21(О ;
А )
Гф12(0е^£Л=ег'/£И/-С-4>|ф12(О+СФ22а)]=(>,-,/£Фп(/); (124)
[д А/
Ф21 {t)ert'Ldt = -LertlL®xj (0; (ф22(t)ert/Ldt = -LeГ//£Ф12(Г).
Пользуясь равенствами (123) и вспомогательными соот-
ношениями (124) с учетом (118), для у<в< 1 находим:
г гТ-уТ
R2(e,E) = fo21(e)er6/£d6 =
JL J
О
= Ф11(е7’-уП-Лф1(е7’-7Г); (125)
г еТ-уТ
R3(E,E)=-^e'^yT) [ф22(е)Л/е = Ф12(Е7-уП;
JL J
О
/?2 (е, Е) = 7?з (е, Е) s 0 при 0 < е < у.
315
Четвертый элемент матрицы R'(e, Е) находится непо-
средственно на основании равенства (121) с учетом (118):
R4(e,E)= - е L 54(т] - yT)dr\ = - [е L dt] =
о о
= |[1 - Лф1(£Г)] при 0 < е < у; (126)
R4(t,E)=^ Je Л/п=|[Лф1(е7-у7’)-йФ1(е7’)] при у<Е<1.
Рассматривая вторую разомкнутую импульсную систему
(рис.7.6,б), образованную звеном Z(p) и присоединенными
к его входу импульсными элементами ИЭ1, ИЭЗ и ИЭ4
(см. рис.4.26), аналогично (114) получаем:
Аис(О = е-<^п7’)/7гсА«с(лП+ {е“(г"т)/йсВ2у"(т)А, (127)
пТ
где
В2 =1||1 1 1 1Ц;у" = ||у5 у6 у7 Of. (128)
На интервале времени п Т< t<(п+1) Т справедтиво равенство
y'(f) = S"(t-nT-E)f(n,E), (129)
где
S'(f - Е) = diag [^(f - у Т), S6(t - у Г), S7(t - уТ), 0 ]; (130)
55(0 =
s6(t) = \
Фц(0
о
при 0 < t < T-t0 ,
при t<0 и T-t0 <t<T\
(131)
S7(t) =
|Фп(0
I 0
при 0 < t < T-t0,
при t<0 и T-t0 <t<T.
Теперь аналогично (120) получим
Амс [(и + е)Т] = /гф2 (е7')А«с (иТ) + R"(е, Е) f(n,E), (132)
где /гф2(0 = е’,/ЙС;
316
R’(e,£) = ||R5(e,£), £й(е,£), RfaE), 0|| =
eT
= J^2(er-n)B2S7ri-^n- (133)
о
Элементы матрицы-строки R"(e£) при j=5,6,7 опреде-
ляются по формуле ,
i еТ
Rj(e,E) = E J^EF-^S/n-yT)^, (134)
с о
вытекающей из (133). Отсюда с учетом (131) получим
О при 0 < е < у,
R5&E) = \
l-L^-h^T - уТ) при у < е < 1.
(135)
Поскольку согласно (131) <$у(ц - у Г) = 0 при ц < уТ,
j = 6,1, формула (134) принимает вид
Rj(е>£) = F N2(еГ " п) (4 - УП =
с ут
г.Т-уТ
]йф2(ет-у£-е)5у(е)4/о, (136)
С о
откуда с учетом (131)
гТ-уТ
R6&,E) = 1 -(еГ-уП/ЛС |с0/ЛСф]1(е)4?е;
С о
. еТ-уТ
£7(е,£) = Le~(^-yT)/RC |со/«Сф12(е)£?е
С О
Определяя интегралы произведений экспонент на эле-
менты переходной матрицы по соотношению (73), откуда
|фп(Г)е'/*сЛ = Се^сФ2](0; |Ф12(0е'/ЛСЛ = Се'/ЛСФ22(О,
получаем:
О при 0 < е < у,
Ф21(еТ - уТ) при у < е < 1;
£б(Е, Е) =
Ry^,E} =
О при 0 < Е < у,
Ф22(еТ - уП - АФ2(еГ - уТ) при у < Е < 1.
(137)
317
Объединяя равенства (120) и (132), получаем уравнение
разомкнутой импульсной системы:
гф(л,Е) = Нф(е7>ф(л) + R(e,£)f(n,E), (138)
где
||Д/£[(л + е)7']| |ЫеГ) 0
2ф'7’Е)“||д«с[(л + £)Т]Г фЕ | 0 йф2(ЕТ) ’’
|RM = ||
k(^)ll II
Rfe£) =
Ri(e,E) R7(e,E) J?3(e, E) 7?4(e,E)|j
/?5(е,Е) R6(e,E) R7(e,E) 0 |
- (139)
Как видно из (122), (135), матрица R(e,E) имеет разрывы
непрерывности при е=у за счет элементов Ej(e,E) и Rs(e,E),
что определяет разрыв непрерывности решения гф(л,Е) в
этой точке.
Поскольку в замкнутой системе в соответствии с равен-
ствами (4.44) и (4.33) справедливо выражение
М = “ ЕлЛис)~ KyR^Aii],
то можем записать
f(n,£) = g(H, Е) - К^ф^у,) - К2гф(л,у+0), (140)
где
Х11 Х12 0 0
g(n,E) = Лд 0 п ; «1 = 0 0 0 0 ; к2 = -1 0 0 -1 ; (141)
и 0 0 0 0
вх (^)
Х11 - Х12
Подставляя выражение (140) в (138), получаем основное
соотношение, определяющее процессы в рассматриваемой им-
пульсной системе,
гф(«,е) = Нф(е7>ф(л) + R(e, E)g(n, Е) -
- К(Е,Е)К1гф(л,у1) - R(e, Е)К2/ф(п,у+0) . (I42)
318
Из равенства (142) находим:
2ф(и,У1) = Нф(у17’)гф(п) + R(y],£)g(«,£) -
- R(Y1, £)KiZ4(п, У1) - R(Y1, £)К2гф (и, у+ 0);
(143)
гф(и,у+0) = НфСуЛМ") + R(Y+O,£)g(«,£) -
- R(y+0, Е)К12ф(и,У1) -R(y+0,£)K2z$(n,y+0).
Как видно из выражений (122), (125), (126), (137), при
0<е<У матрица R(e,£) имеет только один ненулевой элемент
/?4(е,£), расположенный в первой строке и четвертом столб-
це. Поэтому R(Y1,£)Ki=0, R(Y1,£)K2^0 и первое из ра-
венств (143) принимает вид
хф(л,Г1) = Нф(У1Т)2ф(л) + R(Y1,£)g(«,£) (144)
Кроме того, поскольку согласно (122), (125), (126), (137)
и (141)
0 0
R(y+0,£)K2 =
^(y+Qf) 0 0 R^E)
£5(у+0,£) 0 0 0
0 0
второе из равенств (143) упрощается к виду
2ф(и,У+ 0) = Нф(УТ)2ф(п) + R(y+ 0, £)g(«, Е) - R(y+ 0, £)К(гф(п,У|),
а с учетом (144) представляется так:
*ф (Л, Y+0) = [Нф (у Т) - R(Y+0, Е) К1Нф (У1п] 2ф(л) +
+ R(y+0,£)[l-K1R(yi,£)]g(«,£) (145)
Подставив в (142) значение е = 1 и выражения (144), (145),
получим разностное уравнение:
/ф(и +1) = Сгф(л) + Pg(«,£) , (146)
где
С' = Нф(7)-
-R(l,£){[ }=Нф(Г)-р;(147)
Р = R(l, Е) [1 - K2R(y+0, £)][!- KjR(Y1, £)]- (148)
319
Нахождение элементов матриц, входящих в разностное уравнение
Согласно (122), (125), (126), (137) и (141) имеем
K2R(y+0, Е) =
° °|.
-1 0 Aj(y+QЕ) О О R4(y,E)
О -1 ||.K5(y+Q£) 0 0 0
0 0
0 0 0 0
-Л(у+Ц£) 0 0 -Л4(у,£)
-£5(y+Q£) 0 0 О
О ООО
1 0 0 0
1- K2R(y+0, £) = ^(y+Q£) 1 OR4(y,£) • (149)
R5(y+o,E) 0 1 0
0 0 0 1
С учетом (141) найдем
[1-К2К(у+0,£)]К1Нф(у1Г) =
1 0 0 0 XhWyi7’) Х12^ф2(У1^)
*i(y+Q£) 1 0 Е4(У,Е) 0 0
R5(y+Q£) 0 I 0 0 0
0 0 0 1 0 0
ХиЛф^У^) Х12^ф2(У1^)
ХцЛ1 (Y+ Q Е) Иф] (У17) х12я, (Y+ Q Е) йф2(У17)
Xi Л( Y+ Q Е) Аф1 (У1Т) Х12Я5( у + Q Е) йф2 (У1Г)
О О
320
Поскольку
0 0 0 0
-1 0 ||лф1(уП о | _ Mv£) 0 J
К2Нф(уТ) = 0 -1 | 0 йф2(уГ)| 0 >
0 0 0 0
то имеем
[1 - K2R(y+ о, + К2Нф(уТ) =
Х11Аф1(Г17') Х12Лф2(Т17’)
j Xi Л(у+Ц Е)йф,(у17)-йф1(уТ) Х12Е]( У+Q ^йф^У!?)
Хц^У+З Х12Е5(у+ЦЕ)йф2(у17’)-йф2(уЕ)
О О
Учитывая предыдущие выражения и то, что согласно
(121), (139)
|/г1(1,£) Л2(1,Е) Я3(1,Е) ВДЕ)
R(1’£) = ||7?5(1,E) Еб(1,Е) Е7(1,Е) О Г
находим элементы матрицы
р= РП Р12|=К(1,Е)|1-К2Е(у+0,Е)]К1Нф(у17)+К2Нф(уТ)},(150)
Р21 P22II
входящей в выражение (147):
Р11 = 1?1 (1, Eki 1ЫьГ)+Л2(1’ >£1 °’ £)ЫТ1Г)- Ы?7’)]*
+ 1?3(1,£)х11/?5(у+0,Е)йФ1(71Т);
р 13 = 1?! (1, Е)х! 2 йф2 (у IГ) + /?2 (1, Е)х 12 7?! (у + о, Е)йф2 (у ] Г) +
+ /?3(1, Е)[х]2Е5 (у+ 0, ЕМпТ) - Лф2(уГ)];
р21=/?5(1,Е)Х11йф1(у1Г)+Л6(1,Е)[х1Л(у+0,Е)йф1(у1П-/гФ1(У7’)1+
+ /?7(1,Е)Х11/?5(у+О>Е)йф1(у1Т);
Р22 = Е5(1, Е)Х12^2(иП + 7?6(1, Е)/г2Е1(у+0, Е)^^) +
+ /?7(1,£)[х12Е5(у+0,Е)йф2(у1Г)- йф2(уГ)].
321
Подставив значения элементов матрицы R(e, Е)
(122), (125), (126), (135), (137), получим:
Рп = Xu h^(T - Yn йф1(У1п+
L
Li
- Хп Ф12(Г - yT)h^(yiT) = хн
-^Ф12(г-уТ)1йф1(у1П-Фи(7’-уПйф1(гП+йф1(П;
Lj Li
-h^T-yT)] йФ2(У1Л-Ф12(Г-уП L2 =
= Хп р^^)фп(г_уТ)-^)ф12(Т-уТ)1 АФ2(У1Л-
Л-/ V
-Ф12(г-уТ)йф2(уЛ;
P2I =-ХиЦ^)Аф2(Т-уПйф1(у17') +
+ Ф21(Т-упки£^4£®/гФ1(71П -Лф1(уГ) -
Li
- Хп Ц^ФггСГ - УТ)-йф2(Г - уПМФ1(У1П = (151)
= ХиГ8х +у(-)Ф21(Г - уТ)- ^Дф22(Т - упЬф^пП -
Lj v«
-Ф21(Г-уГ)йф1(уТ);
322
р22=-Х12^М^7)МУ1^+%2£^--ф21ММх1т)-
La
^h^T^h^T) =
Lz
= Х12
-[Фгг^-У^-^^-У^Хп
+»с(уПф21(г _уту ф22(Г _уТ)^ф2(У17)-
-Ф22(Т-уГ>ф2(УТ) + Лф2(Т).
В соответствии с равенством (147) имеем формулы для
элементов матрицы С':
с„ =йф1(Т)-ри =Х11Г^Ф12(Т-УТ)-
- Фп(т - у т)К (У1г)+фп(г - уг>ф1(уП;
La
4=-Р12 = Х12Г^Ф12(Г-УТ)-
_ С/вх+«с(у1)фп(Г _ уТ)к2(У)Т) + Ф12(Т - уГ>ф2(уТ);
L/
с^-Рг^ХцР^Фгг^-уТ)-
(152)
_ £в^с(гПф21(г _ уГ)1Лф1(71Т) + Ф21(Г - УПАФ1(УТ);
Li
с22 = Р22 = Х12
_ ^вхЛ^(у1)ф21(Г _ уТ)1йф2(У17) + Ф22(т - уТ)йф2(уГ).
Li
^ф22(т-уП-
Поскольку, как было отмечено, матрица R(yi,E) имеет
лишь один ненулевой элемент /^(У],£), справедливо выра-
жение
323
1 о о
l-K,R(y],£) =
ООО
-хиЛ(г1>£)
о
о
1 I
О 1 о
О О 1
Тогда с учетом (149) получим
[1 - K2R(t+0,^)][1
1 000
Л(у+О,£) 1 о R<(y,£)
£5(у+0,£) 0 1 О
О 0 0 1
1 0 0 -хМъЕ)
0 10 о
0 0 1 о
0 0 0 1
1 о о -xiA(yi.£)
Л(у+о,£) 1 О -Хп£,(у+0,£)£4(у1,£)+£4(у>£)
£5(у+0,£)0 1
ООО 1
и найдем элементы матрицы
£11 £12 £1з £и
£21 £22 £23 £24
Р =
= R(l,£)[1 - K2R(r+0,£)][l _ KlR(yb £)]:
£u = /?1(1,£) + £2(1,£)£1(у+0,£) + £3(1,£)£5(у+0,£);
£12 ~ ^10’^)>£13 ~ ^з0^)>
£14 = ^(1,£)х,Л(у15£) + /?2(1,£)[-Хи£1(у+0,£)£4(у1)£) +
+ £t(y+O,£)J- JR3(l,£)xii£5(y+0,£)£4(y1,E)+ £4(l,£);
Р21 = £5(1,Е)+ ^(1,£)Л(у+0,£)+ £7(1,£)£5(у+0,£);
£22 = ^0>^)’£гз =
р24 = -7?5(1,£)Х1Л(у1,£)+ £б(1,£)[-Х1Л(т+0,£)£4(у„£) +
+ £4(у+0,£)]- Еу(\,Е^М+0,Е)Е4(71,Е).
324
Учитывая, что вектор %(п,Е) имеет только две ненуле-
вые координаты, уравнение (146) преобразуется к виду
2ф(л +1) = сЪф (и) + р*1А«оп (и, 71) + Р*4д«вх («), (154)
та И11 та Г14 - „
где Р*[ = , 1* 4 = ; — первый и четвертый столбцы
11^2111 |/?24||
матрицы Р. В уравнение (154) входят только четыре элемента
матрицы Р, выражения для которых необходимо преобразо-
вать. Остальные элементы р]2, Рц, Р-п, Ргз не представля-
ют интереса, поскольку не входят в конечные соотношения.
Таким образом, преобразуем необходимые выражения
(153):
Ри = ф11(г _ уТ} _ кШ фп(Г _ уГ);
Lj V
р21 = +ис(уТ) ф21(Т _ уТ) _ i^T) ф22(Г _ уГ).
L-!
Р14=-Х1Л(У1,ад(1£) + /?2(1>^(7+0,£) + /?3(1,Д)/?5(у+0,£)] +
+едад(г+0,£)+^(1,£)=^[1-йф1(у17)]Г^Ф12(Т-у7)-
Г V-
^ВХ +«С.(уП ф11(г _ уГ)1 + 1фп(г _ уГ)Ц _ йф1(уг)]. (155)
Lj Л*
^24 =-Х1 Л(п, ад(1, Ё)+^(1, ВД(у+0, £)+/?7(1, £)Л5(у+0, £)]+
+ адг) Я4(у+0, Е) = [1 - йф1(у1Т)]Г/^?Ф22(7' - уТ) -
л* L
-Ubx +иг^Т}- Ф21(Т - уТ)1 + 1 Ф21(Т -уТ)[1 - Лф1 (уТ)].
325
7.5. Годографы полюсов импульсной передаточной функции
и устойчивость инвертирующего преобразователя
Программы расчета характеристик понижающего и иц_
вертирующего ППН аналогичны по своим структурам. При
заданных значениях параметров Qo, q, q6, 4LClT,
A'()T и постоянных внешних воздействиях и, Vj вычисления
на ЭВМ проводятся в следующем порядке. Сначала при задан-
ных Qo, q, q6 u -JLC/T находится граничное значение вре-
мени включенного состояния регулирующего транзистора тОгр,
соответствующее переходу от режима непрерывного тока к ре-
жиму прерывистого тока. Затем определяются координаты не-
подвижных точек (х1ЛГ, xw). Таких точек может быть две: одна
соответствует восходящему участку регулировочной характери-
стики ППН, вторая - нисходящему. Берется первая точка.
По формуле
4.2 = - L7!! * - d'tC' <156)
вычисляются корни характеристического уравнения замкну-
той системы.
На рис.7.7,а представлены годографы корней Z\, ПРИ
£>0=5; #=#б-0,2; 'iLClT = 5; и = 0,5, на рис.7.7,5 — при и=1,
а на рис.7.8 — расчетные зависимости действительных корней
от коэффициентов усиления при Qo = 5; q=q& = 0,2; 4LClT=5;
и = 0,5 (—), ц = 1 (- -) и модуля комплексно-сопряженных
корней от Ко и ХОт при и = 0,5 (—), и=1 (----).
Как видно, годографы корней для инвертирующего
ППН отличаются от годографов для понижающего ППН,
что свидетельствует о существенных отличиях в динамиче-
ских свойствах этих схем. В области малых Ко согласно
рис.7.8 имеются два действительных корня; причем корень
326
Zl монотонно уменьшается, корень zi сначала уменьшается,
затем увеличивается до значения Ко, при котором корни
Zj, z2 сливаются. При дальнейшем увеличении Ко корни ста-
новятся комплексными. В этой области параметров с ростом
А'о возможен выход пары комплексно-сопряженных корней из
единичного круга, либо при сравнительно больших значениях
327
КОт — повторное превращение комплексных корней в дейст.
вительные с последующим переходом корня Zj через значе-
ние -1 (рис.7.8, б).
Выход пары комплексно-сопряженных корней из еди-
ничного круга и происходящее при этом нарушение устой-
чивости сопровождаются более сложными и разнообразными
бифуркациями неподвижной точки xN, чем при переходе
одного корня через значение +1 или -1.
Как видно из рис.7.7 и 7.8, увеличение задающего воз-
действия и (или увеличение у) приводит к усилению зави-
симости корней от Ко, причем в большей мере — к усиле-
нию зависимости комплексных корней от Ко.
На рис.7.9 приведены расчетные границы областей ус-
тойчивости для Qo =5; q=q6=0,2 (а) и <7=<?6=0,4 (б);
« = 0,5 (—), м=1 (- -) и экспериментальные точки для
q-q§ =0,2; и=0,5 и # = <уб=0,4; и=0,5. Круто нарастающие
участки границ областей устойчивости на рис.7.9 соответст-
вуют режиму, когда нарушение устойчивости происходит за
счет перехода одного из корней через значение -1, в резуль-
тате чего, как показывают эксперименты, происходит мягкое
возбуждение колебаний удвоенного периода 2Т. На пологих
участках этих кривых нарушение устойчивости происходит
за счет выхода пары комплексно-сопряженных корней из
единичного круга, в экспериментальном макете в этом слу-
чае происходило возбуждение сложных колебаний.
Как видно из рис.7.9, при наличии только обратной свя-
зи по напряжению (К0т=0) инвертирующий ППН практи-
чески неработоспособен из-за малого критического коэффи-
циента усиления КОкр. Увеличение задающего воздействия и
(или увеличение у) существенно сужает область устойчивости.
328
комплексных корнях Z] 2 коэффициент нагрузки q
^ияет на устойчивость аналогично понижающему ППН (см.
рцс.6.13), т.е. при А'от - const увеличение q сужает область
устойчивости. Например, если увеличение q произошло за
счет уменьшения сопротивления нагрузки R, то в такой ме-
ре увеличивается и КОт. Тогда, согласно (4.35), для поддер-
жания постоянства КОг при R^ = R нужно уменьшить коэф-
фициент усиления Кх или Rw, что понизит эффективность
действия обратной связи по току и уменьшит КОкр.
Экспериментальные значения ЛГОкр были получены на
макете ППН с параметрами: С/вх=20В; L = 7,5 мГн;
Г£=0,75Ом; С=94мкФ; 7? = 44Ом (<?»0,2); 7?=220м
(9 = 0,4); 7?дт = 0,11 Ом; амплитуда пилообразного напряже-
ния — С7П=2В. Изменение -^ЬС/Т производилось регулиро-
ванием частоты переключений в пределах 3-12 кГц. С уче-
том погрешностей измерений можно считать, что эксперимен-
ты подтверждают правильность теоретических соотношений.
329
7.6. Вывод линеаризованного разностного уравнения понижающего
преобразователя с асинхронным интегральным ШИМ
Наличие интегрирующего звена в линейной импульсной
модели (рис.5.10) повышает порядок системы уравнений и
усложняет анализ. Рассмотрим эту модель как многомерную
импульсную систему (рис.7.10) с векторами: состояния
- [|Д/'£,Длс,Дии[[т, входных сигналов непрерывной части
У = И-УнЗ^УзГ и входных сигналов разомкнутой системы
f(nJ£’) = ||Де1(и,У1-01А«вх(и),Ле2(и,У1-0^т, (157)
где Aq(z) = Дг/И(/)-Дйоп2(0; Де2(/) = Дг/оп2(Т) + ЦД Дии(Т).
Поскольку согласно рис.5.10 справедливо равенство
У! + у2 = Днвх ф, на основании уравнений (11) при
Д/н.д(0 s 0 можем записать:
= Ан.фДхф(0 + В'^у(г), (158)
где ДХф = ||Д1£,Дис|]т; матрица Анф определяется выражением
(1.3), а матрица, учитывающая влияние вектора у на £С-фильтр,
(159)
330
Кроме того, на основании рис.5.10 имеем уравнение
Д«Н(О--^Г |[^2^др(Дивх.ф -Д'тг)+(^1 ~^2^др)ДиС + Уз№’
* И
Представляемое в виде
= а;фдхф(о+в;фу(о, (160)
где
_И2Адрг ^-/С2Аяр
Лн.ф Т ’ Т ’
“ И И (161)
в’ s II^P ±|
Н.ф | ГГ1 » ГГ1 ’ ГГ1 II *
II •'и * И *И II
Решение уравнения (158) получается независимо от (160)
и представляется обшей формулой (1.10):
Ахф(/) = Ф'(/ - иТ)Дхф(п7) + ]Ф'(г - 9)B^y(9)J9, (162)
пТ
где переходная матрица Ф'(0 определяется формулой (111), т.е.
ф,().PnW <М0|.
|Ф21(<) Фв(0|’
на интервале времени пТ <t <(n+Y)T
y(O = S(r-«T - £>(«,£); (163)
S(/ - E) = diag[5,(r - уТ),.Ш5з(' " YiH]. (’64)
.. ,. fl при 0 < t < yT,
S,(0=. SuFUBK8(ty, 52(f)= P
1W M BX v [0 при y7<f<T; (165)
S3(/) = FZ„5(0.
Равенство (162) представим в виде
Ахф(и,е) = Ф'(е7)Дхф(л) + R'(e,Е^(п, Е) , (166)
331
где Дхф(ще) = Дх^иТ + еТ) ; Дхф(л) = Дхф(п£); Г-пТ = е£;
R'(e,£) =
Au(e,£) £12(е,£) О
^21 (£’^) ^22 (е’£) О
пТ+ъТ
= JO'(nr + ET-9)B^S(S-n£-£)d& =
пТ
zT
= }ф'(е£-т1)В'.ф8(л-£)^.
о
Из (167) следуют выражения
R\\^E) = у /фп(с^ п)^1(п - =
О при О < Е < у,
^м~^вх Фн(е7-у£) при у < е < 1;
I £
R2i(^E) = у /Ф21(е7, - n)Si(n - у'Л^П =
О при О < Е < у,
Ф21(е£-уТ) при у <е< 1;
Lf
/?12(е,£)= ]Фц(е£ - n)-2(n)^Tl =
7>ф11(е£) при 0<Е<у,
^Ф11(£Л - Ьфп(еТ- у£) при у<е<1;
R22(£,E) = у |ф21 (£Т - п)52(п)<£| =
At>21(£^) ПрИ 0<Е<у,
Ь<Ь21(еТ>) * h<i2l(.£T “ УГ) ПрИу^Е<1,
(167)
(168)
совпадающие с формулами (14), (15), (19), (20), полученны-
ми для случая преобразователя с ШИМ-2.
332
Уравнение (160) решается на интервале пТ<1 <(«+!)£
росле подстановки в него выражений (163) и (166):
д//и(1)=Дми(п7)+ J A" J Ф'(9-л7)Лхф(п)+к1 — -,£jf(n,£)
пт *- к / .
d3+
nT+zT zT
+ jB" ф8(&-пТ-Е)1(п,Е)(1^=Лии(пТ)+А"Н ф |ф'(т])^АХф(л) +
пТ о
А’н.ф + jsfa
о ' о
- £)<£] f(«,£)
Запишем это выражение следующим образом:
Д«и(г) = Ф"(ет>ф(л) + R’(E,£)f(n,£), (169)
где
Ф^еГ) = ||Ф31(еГ),Ф32(е7’),1||;
(170)
||ф31(еГ),ф32(еТ)|| = а;ф |Ф(п)^,
о
R"(e, £) = II £31(е, £), £32(е, £’), 7?33(е, £) II =
= А"нфС{в( J,£рп + В;ф78(п - E)(h. (171)
Интеграл (170) определяется аналогично (17):
}Ф'(П)^ = А4[Ф'(е£)- 1]= Вф(е7')В-1ф = Вф(е£
С учетом этого равенства из (170) получим:
Ф31(еП = ^[^2 ^фн(^) - (*1 - адР>Ф21(^)];
и (172)
Фз2(£7Э ~ ^“['-^2^дрг^ф12(Е7') + (^1 “ 712Апр)/>Ф22(е£)].
* и
333
Интегралы ненулевых элементов матрицы R'l -1
’ J’
входящие в выражение (171), определим с учетом (168) ц
примерных графиков (рис.7.11):
еТ , . zT f .
(Xi = f^2i| = 0 при 0<е<у;
о U 7 i’ 7
= = ~Fr^ [фн(°И =
° У? о
= - У Л при у < е < 1;
p?2ify = J*2i|X Дд = [ф21(0> =
о V ' ут v } L о
= 5мЕивхЬф21^Е - уТ) при у < s < 1;
еТ , , zT
IXzl рп = рф11(пМ1 при 0 < £ < у;
о v ' о
z \ 7^ еТ
кт1= р’фцЬМп + /[^ф11(п)-^ф11(п-у7,)]г/ц =
о v 7 о 7т
еТ
= JXhiGi)^- рфц(п - у7"И| при у<£<1; (174)
о Ут
zT ( > еТ
f R221 2 , Е kn = J^ф21 (n)^n при О < Е < у;
о 7 О
Ef Сг еТ еГ
JX2I J\>21(n)^- |йф21(п-уТ’)^Д при У<Е<1.
О 7 О уТ
334
Вспомогательные соотношения
Из (174) видно, что интегрирование матрицы К'(т]/Л Е)
сводится к интегрированию матрицы Вф(/) =
= А-н1ф[Ф(О - 1]Вн.ф:
|Вф(г)Л = Ан1ф |Ф(Г)Л-Н
Вц ф -
= A-h^[ah^(0-h]bh4 = [a-h^(O-m] АнфВНф, (175)
где для понижающего преобразователя с однозвенным
ZC-фильтром с учетом (1.3) имеем
„ Г L
*;u®((Hi=Ai!4^'<')+c,iii(or ч>,+сМ.
| -А^ФцЮ+гСФцЮ] -АфВ^О+гСФ^)]-,
а произведение матриц А„*фВНф определяется выражением
(1.7). Тогда
рФ11(О^ - ~“К" Еф
J 1\
- 4фн(О + СФ21(О -t -
IX
-|Ф12(О + СФ22(/) ;
А
(176)
|йф12(/)Л = - А'ф
-4фи(О + СФ21(Г) +
к
+^+а2г -|ф12(0+сф22(0
335
[^ф21(0^ - “^"[^-Ф1|(0 + г^Ф21(/)] +
J л
+ ^ф[-^Ф12 W + г СФ22(0]+ ^фС
|г>Ф22(/)л = /фФц(о + г сф21(/)]-
- ^фг[-^Ф12^) + /"СФ22(0]- ^ф^-
Преобразованием (175) получается выражение:
|ВфО)Л = Ан1ф{Ан1ф[ф(/)- = Ая1ф[Вф(П + (Ан1 -1 ]+ А ф-н)1 -1 н.<! }внф — ф], (177)
где (л/ф-^^Ваф- к^с r^rC-t - 0 ' К R L ф . -ЛГф ^Фг+с
-Аф£ -J L °4 —
|вф(ол=хф Следовательно с -L -гС *ф11(0- - ^ф21(?) “ &(р t L ^Ф1г(0 _ ^ф ^ф2г(0+ ^фг + -^
рф11(/)Л=*ф
В А ГЛ
R Л L
Ф'
t
С
р>ф21(0Л=*ф -х f, (о-4-|
J AL
-г
(178)
рФ2г(0^-^ф' -^[^фпСО- Алф ]-r С йф22(/)+ Кф,
£
С
Вычисления по формулам (178) могут оказаться проще,
чем по (176).
336
О
По формулам (174) и (178) находим:
ПриО<Е<у,
л l *-'
+ Фф21(бГ)-^ф21(ЕТ-г7)]}приу<е<1; (179)
- *ф[ьЫе7’)- еТ+^ф21(^)]
сТ /% А
О v
При О<Е<У,
- ^ф{Фф11(еГ) - ЬфП(гТ - уТ)]- уТ +
+ гфф21(еТ)- Ьф2^Т - уТ)]}при у <е< 1.
Элементы матрицы R"(e, Е)
Из равенства (171) с учетом (161), (164), (167) получаем:
(е, Е) — АНф
+ В"н.ф Ет [^(n-Y^Vn ° 0
0
а33(е,£) = в;.ф
/?32(е,£) = А:.ф
о
о
гТ
рз(п-Г1^П
о
О
рг(п)Л1
о
О
(180)
337
Подставляя выражения (161), (165), (173), (179) в форму,
лы (180) и преобразуя, находим:
0 при 0 < е < у,
^—кг^фиСаТ-у?’)-
-(^-Л'гАГдр^фзХеТ-у^-А’г^др] при у<а<1;
К
*31M~
^32 (Б>^)-
*ззМ)=
^Фн(Е^) +
АФ J
+ АГ1ГС*Ф21(е7’)-АГ1е7’] при 0<е<у, (181>
'к
. КФ J
лф
к
+^1г<Фф2 i(e Т) - 6ф2 i (е Т - У^)]- А^уТ} при у < е < 1;
О при 0 < е < yt,
-F при yj < Е < 1.
Объединяя равенства (166), (169), получаем уравнение
разомкнутой системы (рис.7.10):
2ф (я, а) = Ф(а Т) 7,ф (и) + R(e, Е) f(и, Е),
где переходная матрица непрерывной части
(182)
Ф(0 =
Ф'(0 0
ф"(/)
Фц(0 Ф12(0 0
Ф21(0 Фгг(0
Фз1(О Фзг(0
(183)
а матрица, учитывающая влияние вектора f(n,E),
R(e,E) =
R'(e,£)
R'(e,E)
/?п(а,Е) R12(e,E) 0
A21(e,£) A22(e,£) 0
R3](e,E) 7?32(e,E) 7?33(e,E)
(184)
338
Соотношения для замкнутой системы
Для замкнутой системы в равенство (182) вместо f(n,£)
необходимо подставить получаемое из (157) выражение
f(«,£) = Ktg(«3 £) + К2гф(лзУ1-0), (185)
где -1 0 0 0 1 Kj = 0 1 ; К2 = 0 0 0 1 0 0 0 1/£-1 g(«,Е) = IIЛ«оп2(«Л1 \(л)|Т - (186)
вектор входных сигналов замкнутой линеаризованной систе-
мы. В результате этого получим следующее уравнение замк-
нутой системы:
гф(/АЕ)-Ф(е7^2ф(л2)+К(е,£)К^(л, £)+R(e, Д)К,гфи yi-0) .(187)
Подставив е = У1 —0 в(187), получим
*ф(л,71~0) = Ф(71Л2ф(л)+ R(yi-0, £)К^(л,£) +
+ К(У1-0,£)К2гф(л,У1-0),
где согласно (168) и (181) все элементы матрицы Я(У1-0,£)
за исключением £12(У1,£), Я32(У1,£) равны 0;
при £ = У1 терпит разрыв непрерывности только элемент
7?33(е,£). Поэтому имеем:
R(yi--0,£)K2 =
0 £12(У1,£) 0
0 ^22(71’^) 0
0 0
0 0 1
0 0 0
0 О 1/F-1
= 0;
гф(л,У1~0) = Ф(У1Л2ф(/7) + В(У1-0,£)К^(л,£). (188)
Подставив (188) в (187) и положив е=1, получим разност-
ное уравнение
2ф (л +1) = С' гф (л) + Pg(/7, Е), (189)
339
где
С11 С12 С13
С21 с22 с23
С31 с32 с33
= Ф(/) + К(1,Е)К2Ф(У1Т);
(190)
Al Рп
Р21 Р22
Al А2
= R(l,E)[l + K2R(yi-0,E)]K1.
(191)
Поскольку справедливо равенство
00
К(1,Е)К2Ф(У17> 0 0
^1((>^)
ад а
|Фц(Т17) Ф12М 0|,
ШЭДОр
|Фз1(У1ПФз2(У17) 1|
о о
то из (190) с учетом (183) и (184) имеем:
^1 = Ф11(П+^1(1Л)ф31(у1П;
с12 - Ф12С0+ -Кц(1,£)Фз2(У1^);
с13 = ^11(1’^)’
С21 = Фг1(^)+^21(1»^)Фз1(У1^)»
4 = Ф22(Т) + /?21(1,£)Ф32(У1Т); (192)
с23 = ^21(1>^)>
41 = Фз1(Г) + [Л31(1, Е) + (1/F - 1)Л33(1, Е)]Ф31(У1Г);
4 = Ф32(Г) + [Л31(1, Е) + (1/Е - 1)Е33(1, £)]Ф32(У1Г);
4 = 1 + *31М) + № - 1)А33(1,Е),
где согласно (168) и (181)
1(1, Е) = ^вх фп(г _ уГ). £) = SUFU^ ф^т _ уГ).
-Lj L/
[к^Ь^Т-уТ)- (193)
-(^-^дрЧм^-уЛ-^дрЬ
Е33(1,Е) = -Е.
340
Аналогично справедливы равенства:
1 Л32(У1,0) 0 -1 0
[l + K2R(yi-0, £)]!<! = 0 1 0 0 1 =
0 (l/F-l)7?32(y1,O) 1| 1 0
-1 ^32 (Y1»®)
= 0 1 э
1 ( 1/р-1)/г32(У],о)
Яп(1,£) Я12(1,£) 0 -1 ^Зг(Уь£)
Р = аде) ад/?) 0 0 1
R3l(l,E) ад 2?) ад £) 1 (l/F-l)7?32(yi,r)
Перемножая матрицы, получаем:
Рп = -Лп(1,£); pl2 = Rll(l,E)R32(yl,E) + Rn(l,E)-
Рц - “^210>^)> P22 ~ ^21(1>£)^32(Y1’£)+ ^22^£)', (194)
P31 ~ ~Ли(1> E) + E33(l,E)',
P32=/f31(lJ^32(Yi>£)+l?32(l,£)+(V/’-l)/?33(l,^32(Yb^).
где из (168) и (181) имеем
^?12(l,£j = Лфц(Г)-ЬфП(Т- уТ);
А22 (1, Е) = Аф21(Т) - Лф21(т - ут)-
Л31(1,£) = ^y^-{k2 ЛГдр^ф11(Т - уТ) -
- - ^др>ф21(Т - уТ)- аддр];
М>Е) = Ык - ^^Wn(r) - 2>фН(7 - у Т)] + (195)
7И [I, ЛФ J
+ *1гфф21(Т) - *ф21(Т - уТ)] - Кгт};
R33(1,E) = -F-,
^ф11(У17) +
к ЛФ J
+ ^1ГС£>ф21(у17’)- К^УхТ .
341
Анализ корней характеристического уравнения замкнутой системы
В начале расчета, как и в преобразователе с ШИМ-2
при заданных параметрах силовой части Qo, q, q6, JLC/T
определяется время включенного состояния регулирующего
транзистора тОгр, соответствующее границе между режимами
непрерывного и прерывистого токов. Затем по формуле
%2ср = — («1 - «а) + 3 (196)
тп
эквивалентной (5.5), находится относительное среднее значение
выходного напряжения х2ср и время включенного состояния
транзистора в установившемся режиме т0 = тпх2ср/т1.
С помощью процедуры, описанной при рассмотрении
методики расчета ППН с ШИМ-2, рассчитываются коорди-
наты вектора состояния силовой части в момент включения
регулирующего транзистора х(, х2. После этого производится
расчет относительной крутизны
(197)
где крутизна Лм определяется выражением (5.25).
Далее рассчитываются элементы матрицы С'. С помощью
отдельной процедуры производится расчет коэффициентов
характеристического уравнения
Z + + O2Z + — 0, (198)
где а, - (- 1)'д-; коэффициент а,' равен сумме всех главных
миноров порядка i матрицы С':
а1 ~ ~ 11" С = ~(С1) + с22 + с33)’
а2 ~ с11с22 ~ с12с21 + с11с33 ~ с13с31 + с22с33 ~ с23с32 1 (199)
а3 = -det С',
где trC' — след матрицы С'.
342
Сначала с помощью методов Пауэлла и Мюллера опре-
деляются все вещественные корни уравнения (198). Для
этого реализована процедура, в которой производится вы-
числение левой части уравнения при найденных коэффици-
ентах а, и заданном значении переменной z Если уравнение
имеет один вещественный корень zi, то действительная zr и
мнимая zi части комплексно-сопряженных корней рассчиты-
ваются по формулам:
Zr = -(«1 + *i)/2; Z/ = ->!a2-2zpZi - Zr - (200)
Результаты вычислений корней по точным формулам
дня Qo =10; g=^6=l; JLC/T=2,5; Vj=l; v2=0; «2=-0,4;
^j=0,4 показаны на рис.6.16 (сплошные линии). На
рис.7.12 представлены расчетные зависимости относительной
крутизны 5М, и фактора
пульсаций преобразователя
с ШИМ-2, эквивалентного
рассматриваемому ППН с
интегральным ШИМ,
f = J_(M1 - м2)5м,.
~п
Расчеты подтверждают
возможность нарушения ус-
Рис.7.12
тойчивости ППН с асинхронным интегральным ШИМ за
счет выхода пары комплексно-сопряженных корней из еди-
ничного круга, что происходит при уменьшении параметра
АГдрА2/7?1, т.е. при ослаблении сигнала обратной связи,
снимаемого с дополнительной обмотки дросселя фильтра
(см. рис.5.1). Критическое значение параметра KnpR2/Ri
меньше, чем значение, при котором вещественный корень
Zi=0. Изменение параметра KBpR2/R\ слабо влияет на модуль
343
комплексно-сопряженных корней zMK (рис.7.13). Однако
на небольшом удалении от
комплексные корни остаются
единичной окружности,
приближаясь к ней при
увеличении постоянной
времени фильтра. Для
улучшения переходных
процессов может потребо-
ваться, как и в ППН с
ШИМ-2, введение допол-
нительных сигналов, про-
порциональных току дрос-
селя фильтра или производной выходного напряжения.
8. ИССЛЕДОВАНИЕ ИМПУЛЬСНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
МЕТОДАМИ ТЕОРИИ НЕЛИНЕЙНЫХ СИСТЕМ
8.1. Исследование устойчивости в целом
по дифференциальному уравнению
Разомкнутый контур понижающего ППН согласно [42] может
быть представлен с фиктивным диодом, как показано на рис.8.1,с,
НЛЧ
где F(tiy (Г)) — коммутационная функция напряжения на вы-
ходе ШИМ-2 (рис.8.1,6):
un(t) и «у(0 — пилообразное и управляющее напряжения;
НЛЧ — непрерывная линейная часть, включающая в себя
ZC-фильтр; Ид — напряжение на фиктивном диоде.
344
Нелинейная характеристика (1) описывает работу компара-
тора, но не учитывает влияние триггера, также входящего в
состав ШИМ-2.
Замкнутая система описывается системой уравнений:
= Ан.фХф + b[wBXF(«y)- ид],
т (£)
иу ~ моп + сфхф >
где Ан ф - постоянная квадратная /их/и-матрица НЛЧ; Ь, сф —
w-мерные матрицы-столбцы. В режиме непрерывного тока ид=0.
Уравнение для отклонений от стационарного режима
(или для так называемого нулевого решения) имеет вид:
= Ан фДХф + Ьнвх [F (иу ) - F (иу J;
GI {э)
Диу = с£,ДХф,
где Дхф = Хф-ХфС; Дну=иу-«ус, причем хф с, «у с - вели-
чины, характеризующие стационарный режим, хф, иу — ха-
рактеризующие исследуемый переходный процесс (рис.8.2);
F(nyc), F(uy) — соответствующие этим режимам коммута-
ционные функции выходных напряжений ШИМ-2. Обозначим
345
Исследование устойчивости нулевого решения системы (3)
ведется с помощью прямого метода Ляпунова для дифференци-
альных уравнений с разрывной правой частью. Функция Ля-
пунова задается в виде суммы «квадратичной формы и ин-
теграла от нелинейности» [45]:
V = ДхфОДХф + Р ]> (д wy )d(buy), (5)
о
где Q — некоторая положительно определенная матрица поряд-
ка т; Р>0 — параметр;
Г(Диу)дыу>0. (6)
Неравенство (6) должно выполняться для обеспечения
определенной положительности функции И При соблюде-
нии неравенства (6) задача сводится к исследованию
абсолютной устойчивости системы, т.е. определению усло-
вий устойчивости при любых начальных возмущениях и лю-
бом выборе функции F (диу) [42].
Задаются симметричной матрицей G, все собственные
числа которой положительны, и из уравнения
A^Q + QAM)=-G (7)
находят положительно определенную матрицу Q. При этом
матрица G и параметр р должны быть такими, чтобы обеспе-
чивалась отрицательность производной от функции Ляпунова
V, найденной из системы (3).
Найдем производную функции Ляпунова (5) в силу сис-
темы (3):
= [КфАХф +Ь«вхХАму)]Т<2ЛХф +ДХфО[Ан.фДхф +
+ ЬиюГ(дИу)]+ pF(Awy)-^J = Axj(A’ф0 + (2Анф)дхф +
+ ивх к(дНу)(ътОДхф + ДХфОь)+ рг(диу)^^, (8)
346
где согласно второму уравнению системы (3)
[ = СФ = СФАнфАХф + СфbuBKF(д«у).
Далее обозначим G = - (а„ + QAH ф) и покажем, что
матрица G симметричная. В самом деле, поскольку матрица
квадратичной формы Q симметричная, т.е. QT=Q,
G1 - -(a^Q + QAh.4)t = ~(<2тАяф + Аяф0г) =
I -(qa^+a^q^g,
и, кроме того, можно сделать преобразование:
bTQAx4 + AxJQb = (ОЬ)тДхф + [(Qb)TAx<j,]T = 2(0Ь)тДхф,
где из-за того, что (рЬ)тДхф — скалярная величина, имеем
(ОЬ)тДхф = ^Ь)тАхф]Т .
Итак, из (8) получаем:
— = -ДХфСДХф + 2F(\uy )(ГДхф + рГ2(д«у)с^Ь, (9)
где
d = z/BX
Qb+’pA
яфСф. Неравенство
сфЬ<0 является не-
обходимым условием отрицательности знака производной
dV/dt [42].
Выражение (9) представляет собой квадратичную форму вида:
-|дх^,Г(дМу)|| £ ||^^| = -[лх^Дхф+Г(д«у)(Ь2Лхф +
+AxJh])+F2(A«y )?]=-[/ХХфСЛХф + Г(дг/у)(ь] +Ь2)дХф +F2 (Ал/у
Сравнивая это выражение с (9), находим:
# = -pcTb; hi=h2=-d.
347
R =
Матрица квадратичной формы (9) есть
G -d
-dT g
(Ю)
Согласно теоремам Ляпунова об устойчивости производ-
ная dVjdt должна быть либо знакоопределенной, либо зна-
копостоянной отрицательной функцией [47]. Обратимся к
критерию Сильвестра для установления положительной опре-
деленности функции -dV/dt. Согласно этому критерию для
положительной определенности квадратичной формы необхо-
димо и достаточно, чтобы все главные миноры матрицы этой
формы (10) были положительными [10,46]. Поскольку G явля-
ется матрицей положительно определенной квадратичной
формы, то первые т неравенств критерия Сильвестра вы-
полняются. Остается потребовать, чтобы detR > 0.
Представив блочную матрицу R в виде произведения
RJ G -d||jG0|| 1 -G~id|
|-dT g j |o 1|| -dT g г
получим
detR = detGdet | -G ld | = detG(g - dTG-1d)
Следовательно, условие det R > 0 эквивалентно неравенству
g>dTGld.
(ID
Если можно подобрать положительное число р и поло-
жительную матрицу G так, что выполнится неравенство (11),
то нулевое решение системы (3) абсолютно устойчиво.
Примеры. 1. Найти определитель матрицы
1 а II
b sir
где 1 — единичная матрица порядка /я; ъ. = \ахаг...ат ||т - вектор-
столбец, Ь = ||^^ || — вектор-строка размерности т.
348
Разлагая определитель данной матрицы по элементам последней
строки, получим:
I j 0 0 0 0 а,
О 1 0 0 - 0 я2
о 0 1 0 — 0 а3
Q о 0 1 0 а4
О 0 0 - О Я]
1 0 0 - 0 о2
О 1 О 0 а3
О О 1 -- О д4
1 0 0 - О
ООО - О а2
О 1 0 0 а3
О О 1 — О с4
Г2/>!
о О О О - 1 а„
Ь] b2b3b4-bm g
+...+(-1)2и+Х
О О 0 - 1 ат
1 О О - О а,
О 1 О - О о2
О О 1 - О а3
ООО - Одя
О О о ... 1 ат
100-0
0 10 0
0 0 1-0
ООО - 1
= g + (- 1)2т+3ЬЛ + (- 1)7^Ь2а2 + ... + (- 1Г+16иСи = g - ba,
j * II1 а II к,
det . = g - ba.
II b g ||
2. Найти определитель матрицы
где G — квадратная неособая матрица порядка т; а — вектор-столбец, b
- вектор-строка размерности т [10].
Представим данную матрицу в виде произведения
|IG а || _ |G 011111 G ’а II
|ь«Г|0 1||||ь g II’
где для квазидиагональной матрицы [47]
det
в соответствии с предыдущим примером
Следовательно,
det|® а | = det G - bG-1a).
(12)
II Ь d
При выполнении условия (11) возмущенное движение
системы будет асимптотически устойчивым. В условие (11)
не вошли никакие параметры нелинейной характеристики
349
7?(д«у). Следовательно, это условие справедливо при люб0^
форме нелинейности, удовлетворяющей общим требованиям
(6). Такие условия устойчивости, которые не зависят от кон-
кретной формы нелинейности, называются условиями абсо~
лютпной устойчивости системы.
Остановимся далее на условиях соблюдения неравенства (6).
При Д?о < 0 неравенство (6) будет выполнено, если на
интервале A/q разность Auy—uy-uyc отрицательна (рис.8.3,а).
Действительно, согласно (4) в этом случае на интервале Д/о
F(A«y) = F(uy)-F(uyc) = -1; Т(Диу)диу > 0, а вне его
Т(Диу)=0. Для обеспечения условия (6) при этом достаточно,
Аналогично, для обеспечения условия (6) во втором случае
(Дф >0, рис.8.3,6), когда Т(дну)= F(uy)-F(uyc)=l, достаточно,
чтобы на интервале /Ос <1 < + Д/о выполнялось неравенство
(14)
/max v й' /пип
В случае идеальной линейности пилообразного напря-
жения на рабочем участке условия (13) и (14) запишутся как
< Уд .
dUy-c <
< dt > max
(15)
где Un — амплитуда пилообразного напряжения.
350
Режим прерывистого тока
Для этого режима вместо системы (3) имеем
= Ан.ф АХф + b [ uBXF (диу) + Дид
Диу =СфДхф,
где Г(д«у)=/’(«у)-Г(иус); Дид=«д-млс; ил и идс - напря-
(16)
жения на диоде
(рис.8.1,с) в возмущен-
ном и стационарном
режимах. На рис.8.4
сплошные кривые —
для стационарного ре-
жима, штриховые — для
возмущенного; Д1С —
приращение времени
спада тока i^, tcc —
время спада тока в
стационарном режиме.
Обратим внима-
ние на то, что соглас-
но рис.8.4 произведе-
ние Au^ii всегда от-
рицательно. Поэтому
будем рассматривать
напряжение Дид как
нелинейную функцию
от Д/д = -Д/£, так что произведение ДмдД/д всегда положитель-
но, и запишем функцию Ляпунова для системы (16) в виде
Дку Д/д
V = ДХфОДХф + Р ]>(ДиуМ(Диу) + X |дидг/(Д/л), (17)
о о
где X > 0.
351
Производная этой функции, определенная согласно (16)
с учетом (9) и равенства AiR—-^iL будет иметь вид:
^=-ДХф6Дхф +2Г(Диу)«1тДХф +р/’2(Дм )СфЪ-ХДид ^*1, (1g)
ar dt '
где для ППН с ЛС-фильтром имеем уравнение
г . I ию г/ \
согласно которому
= -Lд,-л _ 1 ДЫд + г(дЫу).
Отсюда с учетом равенства Д/£ =е^Дхф, где е$ = ||10||, получаем:
А"д = - уАиде1ДХф - J (Д«д)2 + 7(дЫу)д«д,
*** 1-/ JU
где согласно рис.8.4 справедливо равенство F (д«у)дил = 0.
Тогда выражение (18) запишется так:
= -АХфОДХф + 2F(Atzy)d7^ + pF2(Atzy)cJb +
+ X у Диде^Дхф + у (дид )2. (19)
I- L
Выражение (19) представляет собой квадратичную форму
-||дх^г(д«у),д«д|
Rfi
fiT &
ДХф
/’(диу)
Дид
||Дхф>^«у)|Я
ДХф
F(Atzy)
352
сравнивая которую с (19), находим:
g = -Х/£,
где ез - || 1 0 0||. Отсюда имеем: 2fjT = -X—ej, т.е
Д’
f, = —- е3 =
1 2L 3
V
2L
О ’
О
(20)
g' = -X/Z.
Таким образом, для абсолютной устойчивости импульс-
ного преобразователя в режиме прерывистого тока достаточ-
но, чтобы кроме условия (11) выполнялось условие
откуда аналогично (11) получаем
(21)
8.2. Исследование абсолютной устойчивости импульсного
преобразователя с ШИМ-1 по разностному уравнению
Преобразуя по Лапласу первое уравнение системы (2)
при ид=0 на интервале времени, когда F(«y)=const, получим:
рхф(д) - Хфо = Ан.фХф(р) + ЬТ(ну)«вх(/>),
откуда
хф(р) = (pl - АНфУ’[Хфо + f(«y)«Bx(P)b] (22)
353
Из второго уравнения системы (2) с учетом (22) имеем
«у (Р) = «оп (Р) + Сф (/> 1 ~ АН.Ф )‘ «фо - F (му )жн (р) иъх (р), (23)
где
Ш = -cj(pl - А,ф)“‘ь = - (24)
*^н \Р/
передаточная функция НЛЧ.
Полагая корни pj многочлена QK(p) различными и не
равными 0, разложим функцию на простые дроби:
т А
^н(р) = Е---— (25)
j^P-Pj
Поскольку согласно (24)
рн(pj) = ЛП(PJ = AJQ"&)>
где Qh(p)= 4-Сн(р), имеем
Из (23) с учетом (25) получаем структурную схему НЛЧ
в виде параллельного соединения звеньев 1-го порядка
(рис.8.5). Отсюда выходной сигналу-го звена есть
Уу = j(t0)+ VWw. (27)
Pj L J
Предположим, что регулирующий транзистор импульс-
ного преобразователя периодически включается в моменты
времени t=nT и выключается в моменты пТ+упТ. Тогда
на интервалах включенного состояния транзистора F{uy )=1
и из (27) при t0 = пТ имеем
у. = еРА‘~пТ\.[пТ)+ Г1 _
(28)
354
диалогично для интервала, на котором транзистор выклю-
чен, будем иметь 7(иу)=0 и
yj=ep^-nT-^yj(nT + ynT), (29)
где согласно (28)
у^Ту^е^у^Т) (1-<Л’-г). (30)
Pj
Подставляя t = (п+ 1)7
в (29), с учетом (30) получа-
ем разностное уравнение
уу[(л + 1)7] = еР]ТУ](пТ} +
+^e^(^Ynn[1_ew)j(31)
Pj
откуда, в частности для ста-
ционарного режима, можем
записать
уус[(п + 1)7] = е^у/с(л7) + (32)
Pj
Полагая, что (31) есть уравнение возмущенного режима
системы и вычитая уравнение (32) из (31), приходим к урав-
нению для отклонений Дуу(л7) = у7(я7)-yyc(«7) от ста-
ционарного режима:
+ 1)7]= е^ГА^,(л7) + ^^-e^(7’-y”c7’)(e-p>AY"7’ - 1), (33)
Р,
где дУл =Уп — уис; j = l,m.
В работе [44] выполнен анализ системы, описываемой
Уравнениями (33), с управлением на базе однополярной ши-
Ротно-импульсной модуляции первого рода (ШИМ-1).
355
Модуляционная характеристика ШИМ представлена На
рис. 8.6, где 6/пор — пороговое значение управляющего сигна-
ла, при котором наступает ограничение значения у„; угаах<1
Для этого случая имеем (см. рис.8.7):
Утах Упс при АПу(л7) > ^ус(и7'),
^^Лиу(пТ) при-пу.с(п7^<Д^у(л7)<Цюр-иух(н7), (34)
^пор
- уис при Ьиу(пТ) < -иус(пТ).
Y«a
Рис.8.6 Рис.8.7
Подвергнем систему уравнений (33) г-преобра-
зованию. В результате с учетом равенства
Z (дуу [ (п+1)7]} = г [ Ку (г) - уу (0)] при у7- (0) = О получим
ЛУу(^) = [д«у(и7)]}, (35)
ОО
где Д1у(г)= ^Дуу(ЛТ)г-* ; дискретная передаточная функция
А=0
ер'Т
(36)
Z - е 1
нелинейная функция
Фу[ди (п7)] = ^е~р^Т(е'р^пТ - 1). (37)
Pj
Суммируя выражения (35), получим:
bY(z) = K(nT)]}. (38)
356
Выражение (38) можно рассматривать как уравнение ра-
зомкнутой нелинейной импульсной системы с т параллель-
но соединенными ветвями (рис.8.8).
Рис.8.8
Как видно из (37), если часть полюсов передаточной
функции непрерывной части р} системы комплексно-
сопряженные, то не выполняется требование, чтобы нели-
нейные функции фу были функциями действительного пере-
менного. Поэтому непосредственное применение известных
частотных критериев абсолютной устойчивости невозможно.
В работе [44] предложена методика решения задачи абсолют-
ной устойчивости в частном случае, когда непрерывная часть
системы имеет только одну пару комплексно-сопряженных по-
люсов
Pi д = -а + /<о0 (39)
Методика применима также при большем числе пар ком-
плексно-сопряженных полюсов. Однако тогда увеличивается
число неравенств, подлежащих проверке, что усложняет ис-
следование.
Итак, в случае (39) нелинейные функции <pi и <р2 также
комплексно сопряжены:
Ф1_2[лму(лТ)]= Ф1[диу(лТ)]+Уф2[лиу(«г)]- (4°)
357
Согласно (37) и (39) получим:
Ф = Ивх с^УПсТ^japy^T (еаЛупТe~Jaoiy„T _ |) =
1 -а + ;©0 ' 7
= г*™ 2 е<ХУясГ(- а " >o)(cos®0yncr - у sin«оУисТ) X
а + ©о
X [еаА1'"г (cos ©0ЛупТ - j sin ©0 Ду„ Т)-1]=КМ + LN + j(LM - KN)-
<р2 = KM + LN-j(LM-KN),
где
М = еаАУпТ coscooAYnT1 - 1; N = еаЛ'1пТ sm.<a0NinT;
К =----еаУ"сТ (а COS “оТлсТ + “о sin ™МпсТ); (41)
а + ©о
L = - e^^fasin woy„cr - to0 cos©0y„cT).
а + ©о
Отсюда имеем
Vi (иГ)] = Re Ф12 [диу (иТ)] = КМ + LN;
у2[диу («7’)]= Im<p12[д«у(лТ)]= LM - KN.
Полученные нелинейные функции (42), как показано в
[44], однозначные, кусочно-непрерывные функции действи-
тельного переменного, удовлетворяющие условиям:
о) vu(°) = 0;
б)—^(пТГ Н3)
<0 Vl,2[^y(«r)]G(- °°5 °0) 5
где к\ и к2 ~ границы секторов [0, Л, ] и [0, к2 ] [44].
На основании (35) и (40) можем записать равенства:
АГ1(г) = Ж1(г)7{^1[д«у(иГ)]}-7-Ж1(г)7{у/2[диу(н7’)]};
ДГ2(г) = W2(z)Z{ V1[Auy(«T)]}+j^2(z)z{V2U«y(nT)]}.
358
Из них следует:
дГ(г) = дУ1(г) + дУ2(г) =
= ИЛ'(г)7{у1[дыу(иТ)]}+ Ж"(г)2{ч<2[дму(л7)]}, (44)
где Г'(г) = Ж1(г) + Ж2(г); ^(z) = j[^2U)-JFi(z)].
Из (44) можно заключить, что импульсный преобразова-
тель с парой комплексно-сопряженных полюсов представляется
в виде двух параллельных ветвей с нелинейными звеньями
12[д«у(иГ)] (рис.8.9).
XiU)
x2U)y - у
At^onU)
Полагая, что управляющее напряжение wy определяется
выражением (4.33), получаем с = -Л'ДА'1А'2||Т, и вто-
рое уравнение системы (2) имеет вид:
Uy = А)АГ2ИОП С ^ф-
Поскольку с учетом (1.3)
P + L
С
имеем
р! Анф
£
L
1
Л Ц-—-
RC
где
(р1_АНф)-1 =
P+Jc
£
с
p+l
I
L
det(pl-AH4)=GH(p)= / +2ct^+x~LC = ^ + a^ +t°“’ (45)
выражения для а, соо, А'ф приведены в §1.1.
359
Многочлен в числителе передаточной функции (24) огт
ределяется так:
1 1
Р+RC L
1 г
С P+L
1
L
О
К R । ( л? А
= -±rLP + T^ = *оЖх/> + 1), (46)
-L LL, i\ >
где +
k к
коэффициент’ усиления цепи обратной
связи; постоянная времени 7О С определяется выражением (6.25):
Т =
ос /?дт//? + КДК2 '
Корни (39) характеристического уравнения
СВ(Р) = О
уже определены, поскольку известны выражения для а и а>о-
Дифференцируя (45), получаем коэффициенты 2 разло-
жения (25):
А - - Рн(л). А _ рЛРт) _ ^н(Рг)
1 2(pj + а) 2>0 ’ 2 2(р2 + а) 2>0
Подставив эти выражения в равенства (35), находим:
^(г) =
и^2(г) = Z2 , (47)
2jw0 z - Zi ’ 2jo0 z - z2 ’
2/a>o z — Z[
где z\ = ; z2 = . Тогда
= _1_ [ph(p2)z2 -4(ft)zi]z + [PH(Pi)-T3H(p2)]^iZ2 =
2/“o (z-Zi)(z-Z2)
coSffi0T + (1 - aTo c)Smta°^
w0
e~aT
LC
Z2 -2ze “^coscoqT’ + е 2l,J
Z~e~2aT
-----; (48)
360
- 1 Ip«(p2)z2 + Д,(akik -ИХа)+ ЛЛ/7?,_
U-^)U-z2)
Кос е ar[(l-aroc)cos<n0r-<o0sinm0T]z-(l-aro.c> 2аГ
= ' гр 7 - -пТ . . гт, -2пТ
COq-LC
г2 - 2?е аГ cos<d07' + е 2аГ
Согласно [44] для абсолютной устойчивости положения
равновесия системы, описываемой уравнением (44), достаточно
выполнения требования положительной определенности для
всех и?’ £[0,л] следующей эрмитовой матрицы:
2Reir’(>r)+~
ki
w\e^T)+W’(e^f)
w\eJaT)+W”(eje,T) 2ReW"(eJaT)+~
*2
где функции PK'(eJe,T), Wr"(ejar) комплексно сопряжены с
функциями jy’(e7“r), Для положительной опреде-
ленности этой матрицы необходимо, чтобы для всех
w Т G [0, л ] выполнялись условия:
КеЖ'(е>г)
О, Re^"(e>T)
1
4----->
к2
0.
_1
к
8.3. Метод отображений последования
в теории импульсных преобразователей
Пространства состояний импульсного преобразователя
Импульсные преобразователи, один из которых пред-
ставлен на рис.4.9, в общем случае функционирует под воз-
действием изменяющихся во времени входного напряжения
«вх, тока нагрузки /нд, пилообразного сигнала нп(Г). Поэтому
они представляют собой неавтономные нелинейные систе-
мы, и их движение следует рассматривать в расширенном
пространстве состояний, дополнительной координатой кото-
рого является время (рис.8.10).
361
Предположим, что на интервале времени т0 - t0/T^
процессы в силовой части ППН описываются формулой
(1.37), а на интервале тп -т0 — уравнением
х(т)=А(г-итп-т0)х(птп+т0)+В(т-итп-т0)¥(мтп+т0), (50)
где у(птп + то)=||О, г2(лтп)!|Т. Рассмотрим случай, когда отсутствуют
запаздывания при включении и выключении регулирующего тран-
зистора (т31=тз2=0). Траектория движения системы (фазовая тра-
ектория), начинающаяся на плоскости т=0 в точке Л/(хьх2), рас-
положенной внутри четырехугольника, образованного координат-
ными осями и прямыми xj = х|з, х2 - и - (Ко /КОг )х,, рассчитыва-
ется по формуле (1.37), где и = 0, х^^Цх^О), х2(0)||т =|xi х2 ||т.
Пусть через время т = т0 траектория пересечет в точке М\
поверхность формирования сигнала выключения транзистора,
состоящую из трех плоскостей, соответствующих уравнению
выключения (4.39) и неравенству у < утах, которое можно за-
писать в виде
то < гогаах>
ГДе ТОтах ~ Утах'гп-
362
При выключенном транзисторе траектория рассчитывается
по формуле (50), где п =0. В режиме непрерывного тока дрос-
селя фильтра через время тп - т0 после выключения транзисто-
ра траектория пересечет плоскость т = тп в точке Мт. В режиме
прерывистого тока на заключительной части периода длитель-
ностью тп -т0-тс траектория проходит по плоскости Х[=0.
В силу периодичности по т с периодом тп рассматри-
ваемого пространства состояний достаточно рассматривать
слой, заключенный между плоскостями т = 0 и т=тп; точка
Мт отождествляется с ее проекцией на плоскость т = 0, т.е. с
точкой [48].
Основные отличия импульсного преобразователя от ши-
роко исследованных релейных систем [13,451:
1) регулирующий транзистор включается, когда траекто-
рия пересекает плоскость включения т = 0, а выключается на
другой поверхности, в то время как в релейных системах
обычно имеется одна поверхность переключения;
2) регулирующий транзистор на данном периоде не вклю-
чается, когда начальная точка M{xx,xj) находится вне указан-
ного четырехугольника, т.е. в случае невыполнения условия
(4.30), которое с учетом равенств (4.34), (4.37) при отсутствии
ограничения тока принимает вид
Л2
и~ к
«и(+0)
а при ограничении тока, когда выполняется неравенство (4.36), —
Xj < х1з
М+0)
Л'От67]1
где обычно ип(+0)=0; х13 — задающий сигнал контура регу-
лирования тока;
3) из-за наличия триггера в системе управления переклю-
чение регулирующего транзистора на поверхности выключения
363
происходит только один раз за период в том случае, когда
траектория пересекает эту поверхность в определенном на-
правлении изнутри многогранника, ограниченного поверх-
ностью выключения и координатными плоскостями;
4) в схеме импульсного преобразователя без шунтирую-
щего вход фильтра транзистора возможно еще одно переклю-
чение в силовой части, в результате чего закон движения сис-
темы изменяется и траектория начинает проходить по плоско-
сти х(=0 (режим прерывистого тока).
Расчет значений отображения последования
Алгоритм расчета, подробно описанный в работах
[51,52], учитывает возможные изменения структуры силовой
части и особенности функционирования схемы управления
1ШН (рис.4.9). В начале каждого периода, соответствующем
моменту формирования очередного тактового импульса,
проверяется знак величины
Д(т)= ^0[«-х2(т)]-Лг0тх](т)-т/тп , (51)
если выполняется условие (4.38)
А'0(п-х2)< 7СОтхь, (52)
и
Д(т) = J^otEx^-Х1(т)]-т/тп (53)
при выполнении условия
Возможные варианты этапов вычислений иллюстриру-
ются временными диаграммами на рис.8.11.
Если в начале очередного периода значение Д меньше или
равно 0 и xi=0 (см. рис.8.11), то транзистор и диод на этом
периоде не открываются, и значения переменных в конце
периода хь х2 вычисляются по формулам
Xi (т) = 0; х2 (т) = x2h2 (т) - v2(0) у [ 1 - й2(т)], (54)
364
где значение Л2(т) рассчитывается по формуле
й2(т) = е‘^ф?т
при т = тп; v2 = /нд ЛбД/СфГб); дб =4^!^ Q = Jl/C/A.
Если в начале периода Д<0, Х]>0, то транзистор не
включается, а с самого начала периода открывается диод VD1.
В этом случае используется частный случай формулы (50)
х(т) = А(т)х + B.2(t)v2(0),
(55)
Где время отсчитывается от начала периода; В*2(т) — второй
столбец матрицы В(т); х = ||х1,х2||т — значение вектора со-
стояния в начале периода. Проверяется знак значения тока
Xj(t) при т = тп. При х,(тп)>0 значения Х1=Х1(тп),
х2 =х2(тп) можно определять по формуле (55).
Если вычисленное по (55) значение х1(тп)<0, то в конце
рассматриваемого периода имеется пауза в кривой тока, на
которой диод VD1 закрыт. В этом случае решением уравнения
«11 (тс ) *1 + «12 (тс) х2 + Ьп (тс) v2 (0) = 0, (56)
получающегося из (55), находится момент времени тс пере-
хода переменной х,(т) через нуль (см. рис.8.11). На остав-
шейся части тп-тс периода тп справедливы равенства (54).
365
Заметим, что уравнение (56) не совпадает с равенством
(1.60) при т0 =0, п = 0, поскольку в последнем предполага-
ется х1(лтп) = х1 =0.
Если в начале периода Д>0, то возможны два варианта
протекания процессов в ППН на этом периоде (см. рис.8.11):
транзистор VT1 включается либо на максимальное время
гОп1ах -Утахтп> либо на время т0, определяемое из уравнения
д( тп ) = 0. После проверки знака Д в начале периода по формуле
х(т) = А(т)х + B(t)v ,
(57)
вытекающей из (1.37), вычисляются значения ^(у^Тп),
^(УтахТп) и по формуле (51) - значение Д(утахтп)- Когда
Д(утахгп)^0, транзистор включается на максимальное время
Ymax^n ’ значения Х](утахтп), х2(утахтп) принимаются за на-
чальные для следующего интервала, на котором открыт диод VD1.
В другом варианте протекания процесса, соответствующем
д(утахт„)<0, время т0 находится решением уравнения д(то)=О.
Расчет процесса на остав-
шейся части периода, когда
транзистор выключен, про-
водится по алгоритму, опи-
санному для первого и вто-
рого случаев.
На рис.8.12 представ-
лена рассчитанная по опи-
санному алгоритму проек-
ция на плоскости Хц х2
траектории понижающего
ППН (рис.4.9) при пуске
для ео=10; 9=9б=0,2; JLC/T^2,S-, Ко=4О; К0т=2; и=0,7;
Vj = l; v2-0; ymax=0.8; х1з=4; т31 -тз2-0. Подвижная линия
выключения транзистора состоит из двух отрезков, описывае-
мых согласно (4.39) уравнениями
366
^От
*2 = ~
ЛО
Отп
^Оттп
(58)
По мере изменения пилообразного сигнала линия вы-
ключения периодически перемещается параллельно самой
себе так, что в начале периода тп она занимает положение,
соответствующее т = 0, а на интервале от т()гп.1Х до тп — по-
ложение, соответствующее т = тОгаах. К конце периода эта
линия скачком возвращается в исходное положение для
т = 0. Проекция непрерывной траектории ППН на плоскость
х1г х2 отличается наличием самопересечений, что затрудняет
ее использование для анализа системы. На рис.8.12 показаны
также точки дискретной траектории.
Описанный алгоритм вычисления координат точки
x = (xt,x2) в конце периода тп по координатам точки
х = (х!,х2) в начале периода задает отображение плоскости в
плоскость
Ix = f(x). (59)
Наглядное представление такого отображения затруднитель-
но, поскольку в общем случае оно сводится к т веществен-
нозначным функциям
Xi = fi(xi,x2,...,xm)
т переменных, заданным неявно.
На рис.8.13 изображены графики функций
xt =/i(xi,x2) и х2 = Л(х1,х2), определяющих отображение
последования ППН, для Со=Ю; д = <?б=0,2; ^£€/7=2,5;
Ко=4О; ^=2; м=0,7; vt=l; v2=0; ymax = 0,8. Левые ли-
нейные участки этих графиков соответствуют режиму огра-
ничения длительности т0=утп на уровне тОтах, определяе-
мом системой управления регулирующим транзистором. На
этих участках отображение задается формулой
X =А(тп)х + В(тп)у-В.1(тп -УтахТпЬ, (60)
367
определяющей некоторое линейное преобразование. Недц,
нейные участки на рис.8.13 соответствуют режиму
Ymin<Y<Ymax (в данном случае 7^=0).
Имеются еще не показанные на рис.8.13 правые лилейные
0,6
0,4
0,2
участки кривых, соответ-
ствующие y=ymin и опре-
деляемые при Ymin=0 Ли-
нейным преобразованием
х=А(тп)х+В*2(тп)т2. (61)
Определяя по трафи-
кам (рис.8.13) значения
хьх2 при известных
значениях хь х2, можно
наглядно прослеживать
переходной процесс. Как
видно, при указанных
выше параметрах уста-
навливается устойчивый
предельный цикл дву-
кратных неподвижных
точек A), Ni. При увеличении коэффициента усиления Kq этот
цикл становится неустойчивым, появляются другие циклы, со-
ответствующие субгармоническим колебаниям с более низкими
частотами. Например, при Kq = 50 в ППН имеет место почта
периодический режим с периодом 16 Т, соответствующим резо-
нансной частоте £С-фильтра. Период субтармоники
Тс г » 2лл1ЬС = 15,708 Т соответствует -JLC/Т = 2,5.
Описанный алгоритм вычисления значений отображения
последования соответствует выбору в расширенном про-
странстве в качестве секущей плоскости включения транзи-
стора т = 0 (рис.8.10). Такой выбор секущей поверхности явля-
ется наиболее универсальным для ППН, так как все траекто-
рии, начинающиеся в момент т-0 на плоскости включения,
через время тп с учетом отмеченной периодичности пространства
368
IT -----------------------------------------------------
состояний снова пересекают эту плоскость, даже если регули-
рующий транзистор на данном периоде не включается. При та-
ком выборе секущей поверхности все полученные в первой главе
дискретные уравнения состояния силовой части ППН с посто-
янным периодом дискретности Т описывают отображение после-
дования, если их дополнить уравнением для определения дли-
(тельности включенного состояния регулирующего транзистора Jo-
Вместе с тем такой выбор секущей поверхности не явля-
ется единственным. Можно в качестве секущей выбрать по-
верхность выключения транзистора, состоящую, как было
отмечено, из двух плоскостей [2]. В этом случае отображение
ставит в соответствие любой точке Му траектории (рис.8.10)
ближайшую, следующую за Му точку Му, принадлежащую
поверхности формирования сигнала выключения транзисто-
ра. Особенности этого отображения:
1) интервал времени между двумя соседними моментами
пересечения поверхности формирования сигнала выключе-
ния при тп = const не остается постоянным;
12) на некоторых этапах переходного процесса траектория
не пересекает поверхность формирования сигнала выключе-
ния либо пересекает в направлении, не вызывающем выклю-
чение транзистора; это ограничивает возможности примене-
ния данного отображения.
Известен метод подвижной фазовой плоскости, позволяю-
щий свести исследование релейной системы с периодическим
внешним воздействием к отображению одной подвижной ли-
нии переключения в симметричную ей относительно начала
координат другую линию переключения [53]. При этом ото-
бражение определено в пространстве меньшей размерности,
чем размерность пространства релейной системы.
Если в некоторый момент то траектория пересеклась с
подвижной линией переключения (см. рис.8.12), определяемой
уравнениями (58), то положение точки пересечения на ли-
нии выключения определяется новой координатой
369
I (к V
y = *i(^o)Jl+ ,
V к Л0 )
равной расстоянию этой точки до точки пересечения под.
вижной линии с осью Х2 (для упрощения предполагается пе-
ресечение траектории с прямой, описываемой первым урав-
нением (58)). Однако знание этой координаты не позволяет
восстановить координату х2 и время тд, необходимое для на-
хождения длительности тп-тд выключенного состояния тран-
зистора, зависимость у от у неоднозначна. Поэтому не уда-
ется применить метод подвижной фазовой плоскости к им-
пульсным преобразователям.
8.4. Уравнения импульсного преобразователя с учетом
сопротивления конденсатора фильтра и запаздываний
при включении и выключении транзистора
Наличие сопротивления конденсатора гс, как было от-
мечено, создает дополнительную составляющую сигнала об-
ратной связи, пропорциональную току ic, существующую
даже в случае, когда вводится обратная связь только по вы-
ходному напряжению.
Перейдя в равенстве (1.21) к относительным величинам
По формулам (1.30), получим:
^=^- = Dhx-Jh]v2, (62)
ЛфоОб
где
DH =|4,1»4а|; 4,1 = dK2 = -JL_=—*— (63)
н II Н1> н2||> Н1 1 + <?Гсо> н2 R + rc l + qrc°,
как видно из (63), при гс~0 имеем cfH1=O, Jh2= 1.
В схеме с обратными связями по выходному напряжению
и току дросселя фильтра (рис.4.9) при отсутствии ограниче-
ния тока управляющее напряжение определяется равенством,
аналогичным (4.33),
Uy — jK^K2(Uon *>вых) ^14rrzI ~^п[ ^о(и_хвьгх)_^Дгх1] >
370
где относительное задающее напряжение
и = —;
^фоВД,
коэффициенты усиления
Ко = Кф0КаК}К2 = Кф0К1 (65)
В случае ограничения тока справедливо выражение (4.37)
i/y = UnK0T(xi3 — Xj).
Подстановка выражения (62) в равенство (64) дает
«у = K0Un(u + dH1v2)+ стх(т), (66)
где
с = ||с1)С2||т; q = Afe + *o4i); с2 = ~K0UndH2. (67)
Уравнение для определения момента Т] = Г, /Тф , когда форми-
руется сигнал выключения регулирующего транзистора (рис.8.14),
при подстановке выражения (66) в равенство (4.32) принимает вад
— --К0(и + </H1v2)-icTx(T1) = 0, (68)
Tn U п
где время ij отсчитывается от тактового момента, совпадаю-
щего с моментом начала линей-
ного нарастания пилообразного
напряжения.
В режиме ограничения тока
с учетом выражения (4.37) время
q определяется из уравнения
^--/60т[х1з-х1(г1)]=0. (69)
тп
Отсчитывая время т от момента включения регулирую-
щего транзистора, в уравнения (68), (69) вместо х(т[) необ-
ходимо подставлять значение x(ti~t31), определяемое из
(1-37) при т = Т]— тз1 =т0-тз2, и = 0; x(0) = x, v(0) = v:
371
х(ч -т31) = A(t!-t3,)x + B(tj -t3i)v- (70)
Тогда уравнения (68), (69) представляются следующим образом:
—-A0(u + rfH1v2)--|-cTA(Ti -тз1)х-^-стВ(т! -t31)v=0; (71)
Ч. ип ин
"е2А(ч -гз1)х + е1В(т( -T31)v]= 0, (72)
где е2 = ||1,0|.
Подставляя в (1.37) t=tq, п=0, x(0)=x, v(0)=v, находим
значение вектора состояния в момент выключения регулирую-
щего транзистора:
х(т0)= А(г0)х + B(t0)v. (73)
Для интервала, когда транзистор выключен, справедливо
выражение (1.15), откуда при относительных координатах и
и=0 имеем:
х(т)= А(т - г0)х(т0) + В(т - t0)vb, (74)
где vB = |0,v2||T — значение вектора возмущений при вы-
ключенном транзисторе.
Подставляя в (74) т=тп, с учетом (73) и (1-37) находим
выражение
х = Х(Ч1) = А(тп)х + В(тп)у-В(тп - t0)(v- v8), (75)
совпадающее при и=0 с (1.45). Здесь
IIV. || V - V- = 1 - 1Ы в(тп -^o)(v-vB) = VjBM(Tn 0 v2 - т Но' о) - V1 5 pilfrn - То)| i!^21 (тп ~ г0 )|| (76)
Теперь рассмотрим отображение плоскости формирова-
ния сигнала включения регулирующего транзистора в себя.
Тогда время отсчитываем от тактового момента, совпадаю-
щего с началом линейного нарастания пилообразного на-
пряжения (рис.8.14). Через х обозначаем значение вектора
372
состояния в этот момент, через v по-прежнему — значение
ректора возмущений при включенном транзисторе, а через vB
- при выключенном транзисторе. Значение вектора состоя-
ния в момент включения транзистора определяется подста-
новкой т=т31, т0=О в (74):
х(т31) = A(t31)x+B(t31)vb. (77)
Подставляя в (1.37) «тп = тз1, т = ть v(«rn)=v, находим:
x(xi)= А(т! -t31)x(t3i) + B(ti -t31)v, (78)
а при t=t3j+to ~
х(т0 +t3i)= A(t0)x(t31) + B(?0)v. (79)
На интервале, когда транзистор выключен, справедливо
выражение, аналогичное (74),
х(т) — А(т —То -тз1)х(т0 + т3,) + В(т-т0 -T31)vB,
откуда при т=тп с учетом (79) и (1.38) получим:
х = х(тп) = А(тп -т0 - тз1)х(т0 +т31) + В(тп -т0 - t31)vb =
= А(тп -тз1)х(т31)+[В(тп -т31)-В(тп -т0 -r3])]v + B(Tn -т0-t31)vb.
Подставив сюда выражение (76), с учетом (1.38) найдем:
х = А (тп )х+В (тп ) vB + [В (тп - тз1) - В (тп - т0 - тз1)](v - vB ), (80)
где справедливо равенство (76). При т31=0 выражение (80)
совпадает с (75).
Аналогично выражение (78) с учетом (77) принимает вид
х(т!) = А(т|)х + В(tj)vb +B(tj - t3i)(v - vB). (81)
Нахождение границ областей непрерывности
отображения последования
К таким границам относятся:
1) линия 0ц, ограничивающая в пространстве состояний
области, в которых транзистор включается на регулируемое
время то и на максимальное время тотах;
373
2) линия 0q , ограничивающая области, в которых транзи-
стор не включается и включается на регулируемое время т0;
3) линия 03о, ограничивающая области непрерывного и
прерывистого токов дросселя фильтра;
4) линия 6q , ограничивающая области, соответствующие
режимам без ограничения и с ограничением напряжения на
выходе усилителя рассогласования.
Уравнение линии 0^ определяется из условия, что процес-
сы, начинающиеся от точек х этой линии в тактовые моменты
времени, на первом периоде протекают с включением транзи-
стора на максимальное время тотах. Подставив выражение (81)
в равенство (68) при т1=т1тах=тотах+т31-тз2, получим:
+ ^н!^2 ) + it с (A (1| тах ) Х + В(т1тах ) vB +
+ B(xlmax-T31)(v-vB)]-^ = 0,
гп
откуда
Х2 С1д11('г1тах) + С2д21(,г 1тах ) х ^п(^0ц ~ Т1 max Лп)
) + <~2д22 (Т1 max ) <-10(2 С11 max )+ д2д22(^1тах)
_ [ СА1(Т1 шах Тз1) + с2^21 (Т1 max П>1)1П t
С1°12(Т Imax ) + с2°22(Т1 max )
д I П^пСЧтах) + ^-2^22 (Т1 max ) ~*~ ^п-^0^н11у2 (82)
С1°12 (Т 1тах ) + С2°22(Т 1тах )
Аналогично уравнение линии 0ц определяется из усло-
вия, что процессы, начинающиеся от ее точек х в тактовые
моменты времени, в течение первого периода протекают с
выключенным транзистором. При этом подставляем tj=O,
x(Ti)=x в уравнение (68), в результате чего получаем
x2=-£Lx1-W(u+rfH1y2)=-^i^^x,+^^t^. (83)
с2 с2 ^0дн2 дн2
374
При гс=0, когда I — 0, с/Н2=1, формула (83) совпадает с
получаемой из (51) при т=0, А(т)=0.
На рис.8.15 представлены прямые 0р и 8%, рассчитанные по
формулам (82) и (83) для 0£=1О; q-q^ =0,2; -JZc/T=5;
Утал=0>8’ « = 0,5; v1=l; v2=0; тз1=тз2=0; х1з = 100;
когда координата jq спадает до
нуля на интервале запаздывания при включении транзистора и
на интервале спада тока тс после выключения транзистора. В
первом случае линия 0^ определяется из условия, что координа-
та к, в процессах, начинающихся от ее точек в тактовые момен-
ты, уменьшается до нуля в ближайший момент включения тран-
зистора (рис.8.16,с).
С учетом равенства (77) придем к условию
е5х(т31) = е2А(тз1)х + e^B(r31)vB = 0,
375
откуда найдем уравнение искомой линии
°11(тз1) х _ ^12 (тз1) у
012 (Тз1) 1 012 (тз1) 2
(84)
При тз1=0 имеем eu(x31)=l, Oi2(?3i)=0, 612(x3i)=0, х^о,
т.е. линия Gq совпадает с координатной осью.
Во втором случае линия 6q определяется из условия, что
координата xj в процессах, начинающихся от ее точек в так-
товые моменты времени, уменьшается до нуля непосредст-
венно перед включением транзистора на втором периоде
(рис.8.16,6). При этом справедливо уравнение, получающееся
из (84) при замене х^, х2 на х(, х2:
Лц(гз1) - ^12(T3l)
--------X j-----------V2
°12(тз1) й12(тз1)
(85)
Тогда для определения граничной зависимости х2 от xi не-
обходимо подставить выражение (80) в равенство (85), а для
расчета времени xj или xq по известному значению х исполь-
зовать уравнение (68).
В соответствии с особенностями работы системы управ-
ления с ШИМ-2 (рис.4.9) возможность ограничения задаю-
щего сигнала контура регулирования тока на уровне {7огр, а
в относительных единицах на уровне х1з, необходимо учиты-
вать два раза за период: 1) в тактовый момент времени, ко-
гда от знака величины А(0), определяемой по формуле (51)
или (52), зависит, произойдет переброс триггера в состояние
1 или нет (триггер перебрасывается только при А(0)>0, ко-
гда на входе компаратора появляется логический нуль); 2) в
момент Т[ пересечения кривых иу(х) и ип(х), когда при
«y(ti)<«n('ti) триггер возвращается в состояние 0 и форми-
руется сигнал выключения регулирующего транзистора. По-
этому с учетом неравенства (4.38) линия Qq находится реше-
нием одного из следующих уравнений:
- х2(0)] = А\)Тх13 , Ко[u - x2(xi)] = А(Отх1з. (86)
376
В общем случае множество 0« необходимо определять с уче-
том линий, задаваемых обоими уравнениями.
Первое из уравнений (86) задает прямую
(87)
л0
параллельную оси токов хь причем ограничение тока насту-
пает ниже прямой (87).
При подстановке выражения х2(т]) = ||0, lj|x (тх) с учетом
(81) из второго равенства (86) получим уравнение
Й21(Т1)Х1 +fl22(Tl)x2 +^22(T1)V2 + ^21(т1 ~T31 V1 ~U ~ Хз1 - (88)
Л0
Система уравнений (88), (68) задает одну из линий 0q.
Расчет обратного отображения
Обращение отображения последования используется при
качественном исследовании структуры пространства состоя-
ний нелинейной дискретной системы, в частности для опре-
деления границ областей притяжения неподвижных точек
[54]. Задача сводится к нахождению значения вектора со-
стояния х по известному значению х.
Эта задача наиболее просто решается в режиме непре-
рывного тока при отсутствии ограничения тока.
Умножая равенство (80) слева на матрицу А*'(тп), по-
лучаем:
х = А-1(тп)х - А-1(тп)В(тп) vB -
- АЧ(гп)[в (тп ~ тз1)-в(тп * то - Тз1 )l(v - vв)’
где справедливы тождества:
1) поскольку А(тп)=еТлАп, А(тп)А'1(тп)=еТсА" А 1(тп)=1,
то А-1(тп)=е'ТлА« =А(-тп);
377
2) поскольку с учетом равенства (1.38)
А-,(г1)В(т2) = А(-г1)[А(т2)-1]А;1Вн =
= [А(т2-t^-AC-tJJA^B,, = В(т2-т1)-В(~т1), (89)
то
А-'(гп )В(тп) = В (0) - В(-тп) = -В(-тп);
А-1(тп)В(тп -т31) = В(-т31)-В(-тп);
А-1(тп)В(тп -т0 -тз1) = В(-т0 -тз1)-В(-тп).
С учетом этих тождеств будем иметь
х = А(-тп)х + В(-тп)ув-[В(-тз|)-В(-т0-t31)](v-vb) . (90)
Полученные соотношения позволяют численным мето-
дом вычислять значения х по известному х. Для этого, зада-
ваясь значениями tq=ti-t31+t32, вычисляем х, затем левую
часть уравнения (68) и ишем значение т0, при котором левая
часть (68) переходит через нуль. После этого еще раз вычис-
ляем х по (90).
Режим прерывистого тока
В режиме прерывистого тока (рис.8.17) справедливо вы-
ражение
Х(хз1 + то +тс)= А(тз1 + т0 + тс)х + B(t3j + т0 + tc)vB +
+ [В(т0+tc)-B(tc)](v-vb), (91)
получаемое из (80) заменой тп на тз1+т0+тс. Поскольку
х(т31 +то + тс)=|О,х2н||т, где х2н ~ значение относительного
напряжения в начале бестоковой паузы, из (91) вытекают
уравнение
Й11(тз1 + т0 + тс)х1 + °12(тз1 + х0 + тс)х2 + ^12(Х31 + х0 + тс) v2 +
+ [г>11(т0 +tc)-Z>ii(tc) ]v, = 0 (92)
для определения времени спада тока тс и формула
х2н=х2(хз1 + х0 +хс) = °21(хз1 + х0 + хс) Х1 +й22(хз1 +х0+хс)х2 +
+ 1Мх0 +ТС)-А1(хс)Ь1 - (93)
378
В отличие от (1.55), (1.56), в которых время отсчитыва-
транзистора и начальное
стся от момента итп включения
значение тока х1(лтп)=0, в со-
отношениях (92), (93) время
отсчитывается от тактового
момента, а значение х^О.
В конце бестоковой паузы
согласно рис.8.18 имеем
Х2 = Й2 (тп — Тз1 — Tq — тс ) х2н —
-^-[1-йг(тп-тз1-т0-тсЖ, (94)
где
й2(т) = е ' 1+Га9. (95)
Для расчета значения х2
по
известному х сначала из
уравнения (68) находится время ть а из уравнения (92) —
время тс, затем используются формулы (93), (94).
При обращении отображения необ-
ходимо по известному значению х2 оп~
ределять ть тс, xj и х2. Однако трех
уравнений (68), (92) и (94) для этого недос-
таточно. Поэтому однозначное обращение
отображения возможно только в частном Рис.8.18
случае, когда Х]=0. Приведем соотношения для обращения
отображения последования в режиме прерывистого тока.
Умножив равенство (91) слева на обратную матрицу
А"‘(т31+т0+тс)=А(-т31-т0-тс) и использовав тождество
(89), получим:
х = А-1(т31+т0+тс)х(тз| +t0+tc) + B(-t3i-t0-tc)vb -
-[B(-t3I)~B(-t31-t0)](v-vb), (96)
где х (тз1 + т0 + тс) = || 0, х2н ||т, из (94) имеем
Х2н = Й2 <Лз1 + То + Тс - Тп ) Х2 + ^- [ Л (тз1 + то + Тс - тп ) - 1 ] v2. (97)
9
379
Подставив выражение (96) в (81), с учетом тождества
(1.36) найдем:
x(ti)=A(t1 -тз1 -т0 -тс)х(тз1+т0 +тс)+р8(т! -тз1 —т0 -tc)-B(t1)]vb _
-[В(т! -t31)-B(ti -т31 -T0)](v-vB)+B(Tj)vB +B(tj -t3i)(v-vb)=
= А(-Тз2 -тс)х(т31 + т0 +ТС) + В(-тз2 -tc)vb + B(-T32)(v - vB). (98)
Как видно из (98), значение х(ц) зависит от
х2н =х2(т31 + т0 +тс), но явно не зависит от то и тр
Уравнение (68) для определения то и tj с учетом (98) при-
нимает вид
^o(« + 41v2) + ^-h2(-r3l -тс)х2н +^2(-тз2 -сс>2+Ац(-Тз2)У1]+
+ ^-[«22^32 -*С)*2н+М-*з2-<^2+М~тз2)и]-- =°- (99)
гп
Еще два соотношения для обращения отображения следу-
ют из (96):
Х1 = й12(-1:з1 -т0 “тс)х2н + ^12(-тз1 “t0 _гс)у2 ~
4^i^T3i)-M-*3i-*o)lvi; (i°°)
х2 ~ а22(~тз1 ~т0 -тс)х2н + ^22(-тз1 ~т0 -i:c)v2 “
- -ч)]и> (101)
где х2н с помощью формулы (97) выражается через х2.
Поскольку уравнения (92), (93) представляет собой ска-
лярную запись равенства (91), а формула (96) следует из (91),
соотношения (100), (101) эквивалентны системе (92), (93).
Следовательно, никаких дополнительных уравнений в ре-
зультате преобразований не появилось, поэтому невозможно
однозначное обращение отображения последования в общем
случае режима прерывистого тока.
Для расчета кривой, в которую отображается точка
(0, х2), задаемся значениями т0, начиная с малых значений,
решаем относительно тс уравнение, получающееся из (99) с
учетом (97). При выполнении условия тз!+то+Ч < Ч по фор-
мулам (100), (101) рассчитываем координаты хь х2. Затем
380
задаемся следующим значением т0 и повторяем указанные
ручисления, и тщ.
При jq=0 имеем три уравнения (99) — (101) с тремя не-
известными то, тс, х2 и обратное отображение однозначно.
8.5. Исследование понижающего преобразователя в режиме
прерывистого тока с помощью функции последования
В режиме прерывистого тока ППН появляется дополни-
тельный интервал времени длительностью тп-то-тс, на кото-
ром изображающая точка в расширенном пространстве со-
стояний (см. рис.8.10) проходит по плоскости х^О. Это по-
зволяет свести задачу исследования ППН к рассмотрению
отображения прямой х2 в себя (функции последования).
Функция последования х2 =/(х2) определяется уравне-
ниями (94), (93), (92), (68), (81), где Х]=0. Если время отсчи-
тывается от момента включения регулирующего транзистора
и гс=0, то функция последования задается уравнениями
(1.61), (1.62) и (71), где х2(итп)=х2, х2[(и + 1)тп]=х2,
vi(mu)=vb v2(/rrn)=v2. Тогда с учетом (67) имеем уравнения:
х2 = А7(т0,тс)х2 + + ^2(to3tc)v2; (102)
«пбл +тс)х2+[*|1(т0 +tc)-Z»ii(tc)]vi + 612(to+tc)v2 = O; (103)
~~Кои + [tf0TG12 fri - тз1)+Коа22 (т 1 - тз1 )]х2 + [ЛГОт*11 (xi ~ 41)+
+ ^0^21(т1 ~41)]ь + [^0т^2(х1_41)+^0^22(т1_41)],,2:=О- (Ю4)
Для уменьшения объема вычислений целесообразно
применять параметрическую запись функции последования
[45]. Решив уравнение (104) относительно х2, найдем:
х = А;оц~т1/тп -[W’nfri -4i) + -fr(Ai(xi ~ 41)] vi _
^0т°12(т1 - 41) + -^0°22(т1 - 41)
_ P^(hA2(Tl ~ 41) + ^0^22 (Х1 ~ 41)] v2 (105)
^0тй12(Т1 - 41) + ^0°22(т1 “ 41)
381
Задаваясь значениями параметра т0, находим ti=t0+t31-t32i
по формуле (105) вычисляем значения х2 в момент включе-
ния регулирующего транзистора, проверяем условие преры-
вания тока %! на периоде тп; по формуле (73) вычисляем зна-
чения координат в момент tq
х1(то) = Й12(то)х2 + ^11 (To)vl + ^lz(To)v2 »
(106)
хг(то) = fi22(To)x2 + ^2l(To)vl +^22(To)v2>
решая уравнение (103), — значение длительности спада тока
тс и, наконец, по формуле (102) находим значение второй
координаты х2. При таком алгоритме исключается решение
трансцендентного уравнения (104) относительно т,.
В случае v2=0 можно избежать решения уравнения (103)
относительно тс. Для этого, подставив в (74) т=то+тс,
Х1(то+тс)=О, получим уравнение
«и^с)х1(то) + й12(1с)х2(т:о) + *12(т:с>2 =0,
которое при v2=0 с учетом равенств (1.42) преобразуется к виду:
ctg₽xc =
хг(то)
Чъ х1(*о)
(107)
1
₽
+ С " ?
После расчетов по (106) время тс явно определяется из (107).
При обозначениях у^Л'о^-Хг), у = К0(и-х2) таким
образом рассчитываются графики функций у = (у), y-f2 (у)>
у = т0/тп, представленные на рис.8.19 для 0о=оо; -JLC/T = 1;
Kq = 20; /f0T = 0; тз1 = тз2 = 0; и = 0,5; vt = 1; v2 - 0;
q=qb =0,05 (a); q = q§ = 0,075 (б). Эти графики позволяют
строить диаграмму точечного преобразования и получать
дискретные значения х2(итп) и уй в переходном процессе, со-
ответствующие начальному значению х2(0) (см. рис.8.19,0-
Преимуществом параметрического задания функции после-
дования является возможность просто прослеживать изменение
382
в переходном процессе не только переменной состояния х2, но и
относительной длительности включенного состояния транзистора
у. Как видно из рис.8.19,б, процесс сходится к неподвижной точ-
ке N, т.е точка W устойчива. Однако процесс характеризуется
сравнительно высокой колебательностью. Введение отрицатель-
ной обратной связи по току реактора фильтра (Л^О) позволяет,
как и в режиме непрерывного тока, улучшить качество процесса.
По формулам (102)—(107) рассчитывается участок гра-
фика функции последования x2 = f2(x2), соответствующий
х2<и и Иу(0)>0. Второй участок для х2>и, ыу(0)<0 соответству-
ет случаю, когда транзистор не открывается, в течение всего
периода конденсатор фильтра разряжается на нагрузку по
закону (54) и функция последования имеет вид
х2 = х2й2(тп)- v2 ^-[1 - Л2(тп)]. (108)
В связи с тем что в режиме стабилизации выходного на-
пряжения координата х2 изменяется в небольших пределах,
оставаясь близкой к и, перейдем к новой переменной
у = К0(и-х2). Тогда график функции последования у = gl(у)
состоит из двух участков, соответствующих у>0 (х2<«) и у<0
(х2>и) (рис.8.20).
383
Решая уравнение (104) при х2=и, находим значение Т1=т1пр
для у=+0, т.е. правое значение в точке возможного разрыва
функции у = g] (у), и строим зависимости, представленные ца
рис.8.21 (Qo=oo;^=96;VZc/71 = 1;t31 =тз2 =0; г^=1; v2-0).
На рис.8.20 изображены графики функции последования
для Со=°°; ? = <7б; -JLClT=l-, v1 = 1; v2=0; t31 = T32=0;
XOr=0; К0=20, ы=0,5(а); Ko=125, и = 0,6 (б). Как видно, с
ростом коэффициента
нагрузки q неподвижная
точка N становится неус-
тойчивой и из нее рожда-
ются две двукратные не-
подвижные точки Д'] и N2.
Диаграмма на рис.8.20,6
интересна тем, что про-
стая неподвижная точка N
устойчива в малом со-
гласно рис.7.5, устойчи-
вость в большом имеет
место лишь в некоторой окрестности точки у^ (области при-
тяжения), а при больших начальных отклонениях от точки
384
уу неподвижная точка А становится неустойчивой, посколь-
ку процесс сходится к паре двукратных неподвижных точек
отображения Nr и А2- Неподвижные точки Ny N2 соответст-
вуют устойчивому периодическому режиму с частотой 1/(27 ).
Абсциссы точек Аь N2 являются решениями уравнения
где у = ?2(у)~^1[о1(у)] — отображение, представляющее собой
двукратное последовательное применение отображения gj.
В случае, когда транзистор включается через период, расчет
значений функции g2(y) оказывается наиболее простым. При у>0
в первый период транзистор включается, а во втором периоде
нет. Тогда расчет значений у =g2(y)=K0^-x2) производится
по (102) при замене тп на 2тп. При у<0 в первом периоде транзи-
стор не включается, а во втором включается и расчет значений
у = g2(y) можно выполнить следующим образом: задаемся дли-
тельностью -to =т0 включенного состояния транзистора во вто-
ром периоде и по формулам (105), (1.02) определяем значение х2
в начале второго периода и конечное значение для второго пе-
риода х2, После этого, зная конечное значение х2 для первого
периода, из уравнения (108) находим начальное значение
х2 = х2/г2'1(тп)+ v2 ^2Ч(тп)- Ф
На рис.8.20,6 показаны лишь участки графика функции g2(y)
вблизи точек пересечений с биссектрисой угла между коор-
динатными осями. Эти точки являются простыми непод-
вижными точками отображения g2(y).
Координата простой неподвижной точки N функции по-
следования определяется при х2 =х2 -х2м из (102):
v М (т0 , Тс )V1 + ^2 (т0, Тс >2 (,
х2Лг ------- , ? иич;
1 -М(т0,тс)
и уравнений, получающихся из (103), (104) при х2 = x2N.
385
8.6. Отображение последования импульсного преобразователя
с асинхронным интегральным ШИМ
Расширенное пространство состояний импульсного ППН с
асинхронным интегральным ШИМ (рис.5.1) четырехмерное. Ко-
ординатами этого пространства являются: ток /д дросселя, на-
пряжение «с на конденсаторе фильтра, выходное напряжение
интегратора ии и время. В качестве секущих поверхностей в этом
пространстве, в частности, могут быть выбраны плоскости фор-
мирования сигнала включения регулирующего транзистора т=0 и
включения транзистора т=т31, пересекаемые всеми траекториями.
В этих случаях период дискретизации совпадает с периодом сле-
дования тактовых импульсов, подаваемых на вход ^-триггера.
Для того чтобы не решать систему из трех дифференциаль-
ных уравнений, воспользуемся тем, что уравнения, описывающие
процессы в ZC-фильтре, явно не зависят от напряжения аи(г).
Поэтому остается справедливым соотношение (75), описывающее
работу силовой части преобразователя. Дополнительно найдем
уравнение, связывающее значения напряжения на выходе интегра-
тора в моменты включения регулирующего транзистора ии, йи.
Уравнение (5.1) с учетом (5.2), (5,3) принимает вид:
= ||П,С2||Хф(0- *2*ДР«вх.Ф + ВД>П1> (НО)
где Хф=||к,«сГ; с1 = К2^дрг; с2 = -(Kj - К2Кд,);
Ki = + Д2); K2 = Ril{.R\ +^г)> ПРИ включенном транзи-
сторе Мвх.ф—С/вх, при выключенном мВх.ф=0.
Интегрируя уравнение (ПО), начиная с момента вклю-
чения транзистора (см. рис.8.22), когда напряжение на выхо-
де интегратора равно ии, получаем:
|с1»с2|| =(/оп2~ки> (Ш)
'И L О
386
где при включенном транзисторе вектор хф(/) изменяется согласно
(1.14); л=0; Хф(0)=хф; уф(0)=у. Тогда с учетом (1.13) находим:
|хф(/)Л = |ф(/)Ахф + |вф(0*¥ф = |е'АнфЛхф +
ООО о
+ j(e'A"* -1)лА^фВнфуф = А-н,ф{[Ф(0-1]хф+ [ф(/)-1]Ан1фВн.фУф}-
0
~ ^АнфВнфуф = Анф[Ф(/)—1](хф + АнфВнфуф)—/АКфВИфУф =
- ®ф(0®нф (хф
где
Вф^в^ф =
^фи(0 ^Ф120 ь о
^Ф21(0 ^ф2г(0 О -С
|^ф11(0 -^ф12^)
|^ф21(0 _С&ф22(1)
+ Ан1фВнфУф)-<Ан1фВНфУф, (112)
4 - Аф^ +
иС ~ А^ф(^вх — ^нл)
+ Лн.ф1>н.ф’ф1-
~ ^Ф120[ис ~ Аф(С4х -НнлЯ
~ ^>22(0[иС ~ Аф(с^вх -г/н.д)]
(ИЗ)
•(114)
~сП^ф11(0 z£—Аф
II сьс21|Вф(0Вн.ф(хф + АнфВнфУф)
С^+Ц1-СТф12(0[«с-Аф(
Л /J
387
+ с2 1 ^ф21(0 lL “
- |Чх •
I UA I /
ф| yj тн.д
~^ф22 (О [МС ~^ф(^вх ~пн.д
^вх - 'I _
R нд/
- С 1с1Йф12(0+ с2^ф22О)ПмС ~ ^ф(^вх ~пнл)В (И5)
1|| с1’С2Нн.ф®н.ф¥ф + (^Т^I
- [с1^ф11 (*) + с2^ф21 (*)] Ч. “ ^ф
ф Ч
их
ОП1 ^2-^др^вх)* ~
*нл ) +Х1С/оп1-^др17вхР =
В результате выполненных преобразований уравнение
(111) принимает вид
- Г^вх -
ф1 + Ч.д
2fT [с1^ф11(Г1 ~ Z31)+ с2^ф21(^1 " Гз1)] 'i ~
•'н
[с1^ф12(11 ~ 1з1)+ с2^ф22(11 - 131)][WC - ^ф(^вх ~ пн.д)] +
-'и
+ ^[{/оп1 -Кф(ит -пк.д)]^^- = (/ОП2 . (116)
* и
Уравнение (116) можно записать иначе, если учесть равенства
С1^фП (1) + C2^21(Z) ~ f ~n + сг]д1>21(1) + С1 -
\ -A J
f *2*др
I КФ
~ ^1 ^ф21 (О + С1 ~з
J ^0L
(117)
Ч*ф12(1) + С2*ф22(1) = (ч - С2г)*ф21(1) - с2 =
Сй()С
= ^1^ф21(1)-С2^у7з
®0С
вытекающие из выражения (1.13).
388
Интегрируя уравнение (ПО) на интервале между двумя
соседними моментами включения регулирующего транзисто-
ра, с учетом скачкообразного изменения напряжения и„ в
момент ti-t3i находим:
1
ии = ин + (^onl ~ ^огй) + ДГ ИС1’С2|1 )ХфЛ +
« О
+ т (118)
*и к * J
Определение входящего в (118) интеграла непосредствен-
ным интегрированием вектора Хф(0 связано с громоздкими
преобразованиями. Поэтому воспользуемся имеющимися соот-
ношениями. Интегрируя уравнение (1.2), получаем равенство:
т т
хф - хф = Анф |хф(г)А + Внф рф(т)Л
о о
Отсюда следует
т т
|хф(/)Л = Ан'ф(хф -Хф)- А^фВцф|уф(/)Л, (119)
о о
где из соотношения (1.17) при п=0, Хф(0)=Хф, Уф(0)=Тф,
*ф(*о)=Уф.в имеем
Ан1ф(хф -хф)= Ан’ф[Ф(Г)-1]хф +
+ Ан1фВф(Г)¥ф - Ан*фВф( -t0)(тф - *фВ);
интеграл вектора внешних возмущений
т
рф(/)Л = УфГ0 + ¥фВ(Т - /0) =
о
^bxZ0
II
¥фв = ||0,гнд||т — значение вектора возмущений при выклю-
ченном транзисторе.
389
Следовательно, с учетом равенства (1.13) выражение
(119) принимает вид
т
рф(г)Л = Вф(7)Вн1ф(хф + А-н,фВ„.фУф)-
о
-А-н1фВф(Т’-/0)(уф -Уф.в)- А^фВаф[уфГ0 +Уф.в(Т-/0)]. (120)
Равенство (114) справедливо и при t=T, кроме того,
Ан.фВф(/)(уф ’Уф.в) АГф
-% с
-L -гС
| ^Фи(0
Рф21(0
^ф12 (Z)
^ф22 (0
= ЗДх
- ^ф! 1 (0 + ^ф21 (0
- ААф11 (0 ~ г^ф21 (0
Ан'фВн-фКф^о + ¥ф.в(^" ~ <о)] - Аф
^вх А)
= *ф
_ ^вх^О _ у
D ‘н.П1
~ ^вх^О "^1н.дА
Тогда из выражения (120), учитывая равенство
т
fa(t)dt = T
о
L.cp
и
вых
(121)
найдем средние значения тока дросселя фильтра и напряже-
ния на конденсаторе за рассматриваемый период:
^А/>фП(Т) iL ~Аф(-®;+iH4IJ _<2^ф12(Л[мс~Аф(1/вх-/7нд)]|+
+ *«&ГАьф11(Г_,о)_аф21(Т-,0)1 + + 1нЛ (122)
1 LA J \ К J
+ -^[ААфИ(Т -z0) + гСйф21(Г - Г0)] + К*(итч -пкд),
390
а равенство (118) можем записать в виде
Ии ~ МИ + ^(сЛ.ер + с2^вых) + Лг(-^1^оп1 ~ ^2^др^вху)- (123)
•'и *«
Подставив выражения (122) в (123), получим:
«и=йи +(1/оп1_1/оп2)+^г[с1^фп(7’)+с2^ф21(^)] гД“^фГ~^ + 'н.д'|
~ ЛГ [с1^ф1г(^) + с2^ф22(^)][иС -^ФКх ~Пн.д)] +
Клит
Т„
"^ + с2 Кп(7 ~ 1о)~С(с1
~гс2^ф21(Т ~ fy) +
+ кп1 - ^фКхУ -Пил 1 (124)
* и
где
£l + c2 Cl-rc2=Kir. (125)
/< Лф
Таким образом, получены дополнительные формулы (116),
(124), позволяющие определять значения отображения последо-
вания ППН с асинхронным интегральным ШИМ. Зная значе-
ния координат в начале периода /£, «с, ик, из уравнения (116)
вычисляется время t\ и /Ь=4’41+гз2э затем по формуле (124)
рассчитывается значение координаты в конце периода ни. Дру-
гие две координаты iL, ис рассчитываются по формуле (1.17).
Поскольку при компьютерных исследованиях удобнее
оперировать с безразмерными координатами, в соотношени-
ях (116), (124) перейдем к относительным величинам по
формулам (1.30), где при гс=0 Афо=Аф. Кроме того, введем
относительные величины
<126)
391
Учтем, что согласно (1.43)
с1^ф! I (0 + С2^ф21 (0 = ^ф
К
= Кф \ % + с2 V (т) + -=L- -W
j R^q ₽ J
С1^ф12 (О + С2^ф22^) = сЛг (т) + с2^б^22 (т) =
= АФ (q - rc2>21 (т) - ГС2 ;
л/Лф р
кроме того,
Тогда уравнения (116), (124) представляются следующим
образом:
ги ^1
И
- 7" лД; ^2(tl - Ь1)+-^2- й22 (т! - Т31)
тм д/О'fj, <|Гб L Л) Л)
Q I/
Xj-—Vt-^ -
, % )
X2-V1+^^V2| +
V0 )
+ [^И1 - V! + АГФ v2]ll—E1L = „2 _ Хз; (127)
к Уо J ти
х3 =Xj +(«! -mJt-1 ^q5
1ГБ_*12(’сп)+ I2 М*п)
> Л1
1 1_______2_
ТИ -/^Ф^б _-^1^б
^21(тв) *1-— Ь-Л'фТг -
А Чъ )
*2 -q +Кф^т2 +
V0 )
Чъ
Kvui -Т1У + ^ф ^-v2 .
VO )
(128)
392
Равенство (123) записывается также в виде
x3=x3+(«i-«2)+—flFFxicp+’rx2cpl+7!- ^“Ф^НТ Х129)
Тц *4 J ти Л{Лф
где относительные средние значения тока дросселя и напря-
жения на конденсаторе
+ —ИТ + ^2;
<7б
Проверим, как согласуются соотношения (118), (129) с ра-
нее полученными формулами. В установившемся режиме из
(1.8) имеем
*icp = — ит + *фи>; х2ср = ит - ^~v2’
Qg vo
откуда следует, что г1У = х2ср + Кф v2, х1ср = —х^ + v2.
Уо %
Тогда, учитывая равенство Зс3 = х3, из (129) получаем выражение
*2сР = + —(«1 “И2)>
тп
эквивалентное (5.5).
Отображение последования импульсного ППН с ШИМ
на базе интегратора без сброса (см. временные диаграммы на
рис.5.4) описывается соотношениями (116), (124) и (127),
(128), если в правых частях (124) и (128) исключить слагае-
мые Uonl-Uon2 и иги2.
393
9. ЛИНЕАРИЗАЦИЯ ОТОБРАЖЕНИЯ ПОСЛЕДОВАНИЯ
И СИНТЕЗ ИМПУЛЬСНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
9.1. Линеаризация отображения последования
понижающего импульсного преобразователя
На основе линеаризации отображения последования им-
пульсного преобразователя можно получить те же результа-
ты, что и при помощи линейных импульсных моделей. Что-
бы иметь возможность сравнивать получаемые результаты с
полученными в главе 6, время будем отсчитывать от момента
включения регулирующего транзистора.
В случае, когда не проявляются ограничения сверху и
снизу длительности импульса на выходе ШИМ-2 и сигнала
на выходе усилителя рассогласования DA1 (см. рис.4.9), а
время отсчитывается от момента включения регулирующего
транзистора, отображение последования понижающего ППН
задается равенствами (8.75), (8.71).
Уравнение (8.71) запишется как
cp(x,«,v,Ti) = 0. (1)
Согласно (8.75) и (1) вектор х является неявной функцией
(отображением) от х, и, v. Дифференцируя это отображение,
находим:
dx- Cdx + Ddu + E1cfv1 + E2dv2, (2)
где матрица Якоби отображения
С = |Сп М = <* = А(тп)-^Ь1—o)(v_v )£Ч) (3)
||С21 С22|| Эх 5т0 В/ ЭХ
матрица, учитывающая влияние на х управляющего воздействия и'.
D _ II 1| _ Э? _ _ аВ(тп ~ то) ( _ \Эт0 .4.
HI ви ат0 v в'а«’ v
394
матрицы, учитывающие влияние на х внешних возмущений:
Е,- (5)
«21 II 5т0 dvl
Е, =||М = — = (6)
Se22l| °V2 дх0 dv2
B*i(t) и В*2(т) — первый и второй столбцы матрицы В(т).
Дифференцируя равенство (1.38) при л=0, получаем:
JB(-r) _ dA(x)
dx dx
ах=^АвтКж =
= eA»xAHAHIBH = eA»xBH = А(т)В
(7)
Полагая, что пренебрежение сопротивлением конденсатора
фильтра гс не вызывает существенного изменения свойств и
еристик ППН, но усложняет получаемые математические
соотношения, в дальнейшем будем принимать гс~0.
Из (7) с учетом (1.35), где гсъ=0, Аф=Афо, получим:
JB(t) =
dx
(8)
ав(тп-т0)_
8х
—г^=—all (bi -то
1 /
- ~г^=—°21 (тп -т0
авч(тп
5п
~то)_
1 /
Г^~ °21 (тп
Производная скаляра т0 по вектору х
Зт0
8х0 = II Эт0 Это |
дх || ох} дх2 |
(10)
(П)
1
1
; (9)
395
находится по теореме о дифференцировании неявной функции:
Зт0 _ Зф / Эф . Зт0 _ Зф / 3<р
дх} dxj Эт0 ’ Зх2 Эх2/ Зт0
(12)
Дифференцируя уравнение (8.71), получаем:
^=" 7ГсТА(Т1 -Т31); $ =-7>L°n(Tl -T31)-^-°21Gl -Т31);
ах с/п ах, ил и„
= П12^Т| " Тэ’) ~ 7^ °22^ “ Тз1^;
ах2 ил ил
= ~Tr~bli^1 ~ Тз')_ Tf~b^ ~ Тз^
dvi Un ил (
= ~ ~ Т31)- 7^*22 (Т1 - Т31),
av2 ил ип
(13)
(14)
где коэффициенты сь с2 определяются формулами (8.67).
Аналогично (11), (12) найдем:
где из (8.71)
Эт0 _ 8ф /Эф . Эт0 _ Эф /Зф
av, av,/ Зто ’ 3v2 av2/ат0 ’
Зт0 _ Эф / Эф
ди ди/ Зт0 ’
^=-х0
ди °
(15)
(16)
(17)
На основании (4.32) уравнение (1) может быть записано в виде
cp(x,u,v,Ti)=^i)_f±tl? = o, (18)
где т, =/1/7ф . Из (18) получаем
^<Р = 5ф = т Зф = Тф дил (Г,) _ диу (/J
Зт0 3т, * 3/, Uu dtT dti
Сравнивая это выражение с (4.10), приходим к равенству
Эф _ Эф _ 7ф 1 __ __
Sri Эт0 Ua Нк UnSMF’
(19)
396
где '^м = Vw(?i) ~ крутизна модуляционной характеристики
Ц1ИМ-2, при идеальной линейности пилообразного напряже-
ния SM = Т/Uп ; F — фактор пульсаций, определяемый форму-
лой (4.7), в которой в общем случае (при учете запаздываний
при включении и выключении транзистора) /0 необходимо за-
менить на В случае SM =T/Ua равенство (19) принимает вид
(20)
Эд 5т0 rnF
Установленная связь между фактором пульсаций Fit про-
изводной сЭф/<?Т] в момент сравнения пилообразного и управ-
ляющего напряжений, в который формируется модулируемый
фронт импульса на выходе ШИМ-2, справедлива для всех схем
и режимов работы импульсных преобразователей, если уравне-
ние для определения времени й можно записать в виде (18).
Дифференцируя уравнение (8.71), находим:
Эф = J_____1 стГэА(т!-тз|)х + ЗВ(т1 - т3|) 1
Эд тп Un [ 5т1 5т1 J ’
где
= Ан£АнТ = АнА(т) = А(т)Ан’
Принимая во внимание равенства (7), (21), можно запи-
сать выражение
- - - ^-стА(т1 -тз))(Анх + BHv), (22)
Этг тп Un
которое с учетом (1.34), (1.35), (1.42) преобразуется следую-
щим образом:
Сн(д-Д1)+&й12(д-Д1) —оп(т1-тз1)+
ЭГ1 Тп U„ [[ Qo J 1*76
+<7ai2(-ti-т31)]х2}-
ДГ'2
~ Х °21(т1 -тз1) + ^б°22(т1 ~тз1) х1~
397
Здесь учтено тождество:
получающееся из (1.29) при переходе к относительным па-
раметрам в случае гс=0.
Преобразование выражения (22) приведено лишь для
иллюстрации возможных форм его представления. При рас-
четах на ЭВМ обычно во избежание ошибок целесообразно
пользоваться исходной формулой (22), где выражение
AHx+BHv согласно равенству (1.33) представляет собой зна-
чение производной вектора состояния по времени в момент
/=+0 включения регулирующего транзистора.
398
Как видно из §6.1, вывод выражения для фактора пуль-
саций F методом ^-преобразования сложен. Соотношения
(20), (22) дают более простой алгоритм вычисления F.
Матрица Якоби отображения последования (3) с учетом
(Ю) - (12) и (8.76) представляется следующим образом:
C = A(Tn)-v,
дВ,](тп -т0)5т0
St0 Эх
( Г1 О11^п -т°)? о,,^п
Vj I сер 8хх ox-i
^Кф<1Хдго) о21(тп - т0)~- a2i(Tn
tzX| ОХ2
откуда, учитывая (13) и (8.67), при гс~0 найдем:
Эср
cu - °и(тп)“ -~г^= ।
+ АГ0а21(т] - тз1)];
п ~ т0 )[^0т°11 (Т1
гт;— д “llvn
д/^Ф?б1ат(М
+ ^0°22(т1 ~ тз1)Ь
Sep
9б\®то
+ ^o°2i(Ti -тз1)];
Sep
-1
(24)
п ~ то)[^0т011(т1 -тз1) +
с21(тп ~ то)[^От°12('
V]
И
+ ^0^22 (Т1 - тз1)1-
Поскольку справедливы равенства (1.42), связывающие
элементы матриц А(т) и Ф(ф то с учетом (20) имеем
1 f Sep^l 1 = =____TF____= TFR^
-/^Ф?б1^тоу ^ф^
399
сравнивая выражения (24) и (7.32), при гс=О получаем:
С11 ~ с11» с12 ~ ^бс125 С21 ~ с21/^6’ с22 - с22- (26)
Аналогично к удобному для расчетов виду преобразуем
выражения (4) - (6):
D = v (S<P / Sep "I SBtl(?n -т0).
Л Sa/ St0J 5т0
(27)
е11 - ^11(тп)-6ц(тп -т0)-
°11(тп - To)IXoiAl(Tl
- т31)+/Г0А21(т1
ы)];
е21 - ^21(тп)-62](тп - Т0)-
~ то)[^От^11(т1 ~ Тз1)+^(А1(Т1 ~тз1)1>
+ Kob22 (т, - т31) ];
~ ^22(тп)~
-A-fM *210
9б \St0 J
~тз1) +
е22
~ то)[^От^12 (Т1
+ (Ti ~ тз1)]•
Сравнивая матрицы D, Еь Е2 со столбцами матрицы Р,
входящими в уравнение (7.35), с учетом (25) получаем:
400
Ji - К,К. К^КбРи ; d2 - KRJKjK2P2i ', ец - л, fei
ЛФ
1 1
е21 - ~7Г~ Р22 > е12 ~ Р13 > е22 ~ 7Г Р23
Лф Лб
(30)
Возможен непосредственный переход от уравнения
(7.35) с физическими координатами к уравнению (2) с отно-
сительными координатами, если воспользоваться преобразо-
ванием (1.31). Применительно к принятым в уравнениях
(7.35) и (2) обозначениям формулы (1.31) запишутся так:
. dx = Погф(и); dv = |^’ | = n^fa),
где матрицы По, П, даются формулами (1.32). Тогда, умно-
жая уравнение (7.35) слева на матрицу По, получаем:
dx = Погф(л + 1) = П0С'Щ’П02ф(л)+ Л1Х2П0РмДиоп(л,у1) +
+ П0||Р«2 Р.зЦП^ДУфОО^
= П0С’П^х + ^2*фадП0Р^« + П0||Р.2 р«3 liniXdv.
Сравнивая это равенство с (2), находим:
С-ЩС'По1; П=ХфЗДВДПоРч; ||Е1 Е^П^ Р.3||Пг’.(31)
Отсюда с учетом (1.32) и выражений для По' и П( 1 можем запи-
сать:
С11 с12
1
0
— о
С21 с22
Кфиб
0
1
КА Лб “
0 1
С11 ^бс12
4 с'
в С22
1
= кфклк.к2и6 -
2
^бА1 II.
Р2\ Г
е11 е12 || _ _____1___||^б ®||||Л2 ^13||[/-
е21 е22 II ^ф^б || 0 1||||р22 fell
1 о
о
Кб
КфР12 Аз
1 1
V~fe Ъ fe
ЛФ ^б
Из этих равенств следуют соотношения (26) и (30).
401
9.2. Расчет динамических показателей качества
понижающего преобразователя
Расчет динамических показателей качества является
важнейшей частью любой программы синтеза импульсных
преобразователей. Тесная связь между показателями качества
системы и расположением нулей и полюсов дискретной пе-
редаточной функции на комплексной плоскости [4], сравни-
тельная простота алгоритмов расчета нулей и полюсов на
ЭВМ позволяют создавать на этой основе эффективные ме-
тоды синтеза. Дополнительным преимуществом таких мето-
дов является связь между расположением полюсов линеари-
зованной системы и бифуркациями на границе устойчивости
исходной нелинейной системы [48 - 50].
Динамический синтез импульсного преобразователя
удобно проводить пользуясь зависимостью перерегулирова-
ния АЛщах, времени первого максимума переходной функции
4nax и времени установления колебаний zycT от полюсов и ну-
лей передаточных функций. Для повышения быстродействия
ППН в основных режимах целесообразно иметь комплексные
полюсы. Этот метод распространяется и на системы высокого
порядка, имеющие два доминирующих комплексных полюса
и нуль, расположенный на действительной оси, если осталь-
ные полюсы и нули находятся вблизи начала координат [4].
Заменяя в уравнении (2) Jx, du, dvx, dv2 на Дх(и), Aw, Avi,
Av2, Jx — на Ах(и+1) и переходя к ^-преобразованиям по
формулам (7.37), (7.38), находим передаточные функции:
^feb^=efeI-C)-E2,
аналогичные выражениям (7.50) - (7.52); е = (|0,1||.
гично (7.53):
где
(34)
С 22 G- )
Общая для выражений (32) матрица определяется анало-
ев! -С)’1 =щ^||с21,г-сп||,
Л(г)= det(zl-C) =
= Z1 - (сп + C22)z + сххс22 - С12с21 = Z2 + axz + а2; (33)
=~(с11 +с22)> °2 = с11с22 -с12с21 = detC.
На основании равенств (26) замечаем, что характеристический
полином A(z) дискретной системы одинаков для передаточных
функций, поточенных при физических и относительны'' ^^птплнятах.
Из (32) получаем:
да/ (7\ - 4U~Zqu).
A(z) ’
W 4) = ^-^_____ц/ / \ _ j? '7______-
A(z) ’ A(z)
где нули передаточных функций:
4«=с11 ~с21 4v. =cu ~c2l Zov2 = CU ~c2l ~ - (35)
4 e21 e22
Назовем переходной функцией ППН его реакцию на
единичное ступенчатое воздействие, приложенное к одному
из трех входов. Например, полагая, что относительное опор-
ное напряжение Аи-1 при т>0, Ап=0 при т<0, находим изо-
бражение выходного напряжения:
ДХ2(г) = (z)= —^(z-zou) 41 + 4z ..+41, (36)
z~* (z-l)[Z2+alz+a2) Z + axz + a2
где
I 4 0 ~ Zqu ). _ 4 С- ~ _ Zqu <?i ) 4- (37)
1 + Gj + 1 + Gj + G2 1 + Gj + G2
Полагая корни многочлена A(z) комплексными, а именно
°2 4 ’
(38)
01 ± /
42
403
402
переходим от z-изображения (36) к оригиналу:
Дх2(л) = —?о«)[1(л)_ е-а->пТ cosCinT +
1 + at + а2
+ oL±2a1+z^+^)e-a3„r sinQ„J (3
где a3=-^ln^; е’“зЛГ=елк1'^=(л/^’)"=|г1.2Г’’ «^argZi.
Выражение (39) запишем в более компактной форме:
Дх2(и) = Ки 1(л) + -cos(Q«7 + 0 - л) , cos G (40)
где К - . о - яге ?! ~ ZQu , Я Е Z.-1 +Г (41)
В реальных импульсных преобразователях без большой
погрешности можно аппроксимировать Дх2(и) функцией, по-
лучающейся из (40) при замене t=nT;
— е “3,cos(qT + 0-л) ,
(42)
1
cos
где a3r=-ln|zi2|= -0,51по2. Из (42) находим максимальное
перерегулирование
(43)
время достижения первого максимума переходной функции
1 ( л
^шах _ arctg Сз - е + п (44)
т пт 1
где ^3 = аз/т/п2 + а3 , и время установления (время
регулирования), по истечении которого отклонение
404
переходной функции от установившегося значения не пре-
вышает 5%,
Т а3Т |cosG|
(45)
Перерегулирование Айтах, а также величины
/тах/Г, ^уст/^ определяются только коэффициентом затуха-
ния замкнутой системы С,3 и углом 0, который, в свою оче-
редь, вычисляется по расположению полюсов zi, Zi и нуля
Zou передаточной функции замкнутой системы.
При подстановке в выражения (40), (41) вместо zOi/ нулей
Zovp Zqv2, определяемых по формулам (35), соотношения
(42) - (45) можно использовать для расчета переходной
функции и показателей качества, соответствующих возму-
щающим воздействиям Avj и Avj-
На рис.9.1 приведены расчетные зависимости показате-
лей качества импульсного ППН от Ко для <2о — Ю; ^-^ = 1;
JZC/7’ = 2,5; v1=l; v2=0; н = 0,6(-); м = 0,8(—). Как вид-
но, с ростом коэффициента усиления Kq резко увеличивает-
р ..
ся перерегулирование АЛ^ и уменьшается время гтах. Уве-
личение коэффициента вызывает уменьшение перерегу-
лирования и времени установления /уст. Когда перерегулиро-
вание станет меньше 5%, время fycT оказывается меньше fmax.
Например, при Ко=1О, Аф.=6, &=0,6 получаем Дйтах=2,1%,
^тах/7^2,86, Густ/Т=2,5. Предельное значение Густ/Г=2 соот-
ветствует процессам конечной длительности. С увеличением за-
дающего воздействия и от 0,6 до 0,8 растет перерегулирование.
Вычисленные по описанному алгоритму значения A/im;ix и
^тах/^ проверялись сравнением со значениями, получаемыми по
приведенным в [4] номограммам, позволяющим находить эти
показатели качества при известных 0 и £3. При этом использова-
лись получаемые в ходе вычислений на ЭВМ в качестве проме-
жуточных данных значения угла 0 и коэффициента затухания £3.
405
Прохождение низкочастотных пульсаций со входа на выход
импульсного преобразователя
Импульсные ППН часто питаются от выпрямителя с
фильтром. В этом случае на вход ППН кроме постоянной
составляющей напряжения UBX подается и переменная со-
ставляющая с частотой, которая обычно значительно меньше
частоты переключения регулирующего транзистора. Эти
пульсации проникают и на выход ППН.
Для оценки подавления входных пульсаций целесооб-
разно использовать псевдочастотную характеристику, полу-
чаемую из передаточной функции (z) (34) подстановкой
z = (1 + w)/(l- w) и заменой w=j\T/2:
Hri(JV = -KVl
(T0VijX+\)(j^T/2-\)
тс2(/х)2 + 2^7;а+1’
(46)
406
гдс аналогично (41) коэффициент усиления
К = g21^ ~ г°у1) •
постоянные времени
+ Т |(l + zt)(l+7j.
Ovi 21-zOv/ с 2V(1-^)(1-z2)’
коэффициент затухания
г }~ZiZ2
абсолютная псевдочастота
(47)
(48)
(49)
(50)
Поскольку реальные частоты пульсаций входного напря-
жения ППН &<2/Т, то псевдочастота X мало отличается от со.
На рис.9.2 представлены зависимости коэффициентов и
постоянных времени, входящих в выражения (34), (46), а
также относительной длительности включенного состояния
регулирующего транзистора у и фактора пульсаций F от Ко для
Gb=10; ?=^=1; vj = l; v2=0; u=0,3; у31=0,05; уз2=0,1;
КОт-2; -JTC/Т=2,5(-); 4bC/T = 5(--). Как видно, с ростом
относительной постоянной времени выходного фильтра ППН
407
JLC]Т величины TJT, TOfJT также растут, коэффициент за.
тукания Сс уменьшается, а коэффициент увеличивается.
На рис.9.3 изображены построенные по формуле (46) ам-
плитудно-частотныс характеристики (АЧХ) ППН в функции ос-
тальные точки для Хо=6О; у31=у32=О; а:0т=0(оо) и
-^от=2(хх)’ Хо = 8О; ХОт=2; т31 =Уз2 =°(по) и уз2=о(дд).
Гармоническое воздействие (/вх~=100 — 500 мВ подавалось от
звукового генератора последовательно с постоянной состав-
ляющей входного напряжения Г7ВХ=17,6 В, амплитуды гармо-
ник на входе и выходе ППН измерялись анализатором спек-
тра СК4-56. Эксперименты подтвердили правильность теоре-
тических характеристик. Увеличение коэффициента усиле-
ния Kq снижает коэффициент передачи гармоник со входа на
выход. Отрицательная обратная связь по току реактора
фильтра, увеличивая затухание С,с в замкнутой системе,
уменьшает значение резонансного максимума АЧХ, но слабо
влияет на нее в области низких частот.
Некоторые авторы занимались обоснованием того, что в
области устойчивой работы импульсного ППН его фильтрую-
щие свойства с достаточной точностью могут быть исследованы
при помощи непрерывных расчетных моделей [55, 56].
Линейная непрерывная структурная модель импульсного
ППН (рис.9.4) получается из импульсной модели (рис.6.4)
408
заменой идеального импульсного элемента ИЭ1 пропорцио-
нальным звеном с коэффициентом передачи 1/7", а последо-
вательности прямоугольных импульсов малой высоты Апвх и
длительности — непрерывным сигналом уА«вх. Особенно-
стью этой непрерывной модели (рис.9.4) является учет фактора
пульсаций F, который может рассчитываться по формуле (4.48).
Рис.9.4
Для схемы на рис.9.4 справедливо уравнение
^н.оп(р)АС7оп(р)+ ^н,х(р)АС/вх(р), (51)
где с учетом (4.53) и (6.24) передаточная функция непрерыв-
ной модели для управляющего воздействия
jH'
н.оп
^н.оп (/О Т2 2 + 2С т ! ’
n.V
(52)
передаточная функция для входного напряжения
н.вх
н .вх С/0 2 2 у- т , ’
Т^..р + 2СН СГП ср + 1
Ц.С1 ^П.С 11. с.'
(53)
коэффициенты передачи на частоте со=О
г/ — Н.ОП __
Н.ОП гр-
^Д
FKoVl
Кд
д
н.вх
1+Як0 + q-K^
\ #6
409
постоянная времени непрерывной модели
-т- _ _______
1 Н.С ~ I--X---------
l + Fko+_LK(h
V I 4б
коэффициент затухания непрерывной модели
Ън.с I-----у---------
i + rko+-*
Y \ ?б
На рис.9.5 представлены зависимости параметров, вхо-
дящих в выражения (46), (52), (53), от ЛЬ при £?о = 1О;
9=?б = 1; yfLC/Т = 2,5; w=0,3; v,=l; v2=0; АЬТ=О; уз1=0,05;
уз2=0,1, а также зависимости для определения относитель-
ной длительности включенного состояния транзистора у и
фактора пульсаций F.
Как видно, коэффициенты усиления на частоте
для управляющего (Ки, Калп) и возмущающего (К„1,ЛН.ВХ)
воздействий, найденные по точной (A'„,KV1) и непрерывной
(^н.оп> Кн.вх) моделям, мало отличаются в широком диапазоне
изменения коэффициента усиления Kq, что еще раз подтвер-
ждает допустимость определения малых медленных изменений
410
выходного напряжения Дпвьи по линейной непрерывной мо-
дели. Однако АЧХ, получаемая из (53) заменой р =ja, суще-
ственно отличается от псевдочастотной характеристики (46)
за счет наличия в числителе (46) множителя T0Vijk +1, кото-
рый ухудшает сглаживающее действие импульсного ППН
для высокочастотных гармоник входного напряжения (на
частотах и » X > 1/Tqvj )- ДрУг°й причиной отличия является
возрастающее с ростом К$ расхождение между постоянными
времени Тс и Т„ с. В связи с этим при оценке прохождения
пульсаций со входа на выход целесообразно пользоваться
формулой (46), полагая о к Л..
9.3. Синтез линейных систем
с заданным показателем колебательности
Материал параграфа основывается на работах [31, 57].
Для оценки запаса устойчивости, как в случае непрерывных,
так и импульсных систем, наиболее простым и эффектив-
ным оказывается показатель колебательности. Показатель
колебательности представляет собой высоту наибольшего
пика АЧХ замкнутой системы, отнесенного к ее начальной
ординате (рис.9.6,о):
|Я(»|тах
Л/-~Ж/0)Г
Он показывает склонность системы к колебаниям.
(54)
411
В случае, когда начальная ордината АЧХ замкнутой сис-
темы | Я( j 0)|-1, показатель колебательности
Л/ = |Я(уЮ)|гпах
1 + Й/ф)
max
Сделав подстановку W(j&) = U + jV, где U = Re IF О'и);
V = 1шЖ(/со), получим:
+ Г2 .л
— = м,
'.2 , Iz2
откуда следует уравнение окружности (рис.9.6,б)
(U + С)2 +V2 - R2, (55)
М2 М
Л/2-1’ ЛГ2-1'
(56)
Если при проектировании системы ставится условие,
чтобы ее показатель колебательности был не больше некото-
рого значения М, то АФЧХ разомкнутой системы не должна
заходить внутрь окружности (55), являющейся запретной зо-
ной для АФХЧ. Чтобы отобразить запретную зону на лога-
рифмическую сетку, на указанной окружности (рис.9.7,а)
возьмем произвольную точку В и построим вектор, соеди-
няющий эту точку с началом координат. Установим связь
между модулем этого вектора А и запасом по фазе р. Из тре-
угольника 0В0\ по теореме косинусов находим
cosp =
А2 + С2 - R2
2 АС
Кроме того, с учетом (56)
2
С2 - R2 =
М2 -1
м V = м2
М2~ М2-\
412
(57)
(58)
Поэтому окончательно получаем зависимость
А2 + С
ц = arccos-----,
2АС
которая существует только для модулей, лежащих в пределах
М . М
—----< А < ----.
М + 1 М-1
г, л М . М
В случае, когда А<----— или А>------, запас по фазе
М + 1 М-1
может быть любым, так как в этом случае конец вектора не
может попасть в запретную зону.
По выражению (57) можно построить зависимости тре-
буемого запаса по фазе от модуля ц=/(Л) для заданных зна-
чений показателя М (рис.9.7,б). Можно найти, в частности,
максимальный запас по фазе
1 4м2. 1
цшах = arccos -j= = arccos ——— = arcsin (59)
достигаемый при A = -Jc. При условии (59) отрезок ОБ каса-
ется окружности в точке В.
Если имеется построенная ЛАЧХ, то по имеющимся
ц-кривым (рис.9.7,б) и заданному значению М для модулей
А, лежащих в пределах (58), можно построить зависимость
требуемого запаса по фазе от частоты (рис.9.8). В результате
413
будет получена запретная область для логарифмической фа-
зочастотной характеристики (ЛФЧХ).
Рекомендуемый показатель колебательности лежит в пре-
делах М = 1,3 - 1,7. В некоторых случаях, когда система регули-
рования должна быть
очень хорошо за-
демпфирована, при-
нимают Л/=1,1 - 1,3
и даже Af=l. Значе-
ния показателя ко-
лебательности выше
1,7 - 1,8 приводят к
резкому возраста-
нию склонности системы к колебаниям [31].
Типовые логарифмические амплитудно-частотные характеристики
Принципы построения ЛАЧХ систем управления, имею-
щих в замкнутом состоянии заданный запас устойчивости, оп-
ределяемый значением показателя колебательности М, извест-
ны [31]. При этом разомкнутая система предполагается мини-
мально-фазовой. Для удобства расчета систем регулирования
вводятся типовые ЛАЧХ, применение которых автоматически
обеспечивает получение заданного запаса устойчивости.
ЛАЧХ типа 2-1. Простейшая асимптотическая ЛАЧХ для
На интервале ю<и2=1/^2
систем с астатизмом второго
порядка изображена на
рис.9.9. Ей соответствует пе-
редаточная функция
W{p) = (60)
Р
асимптотическая ЛАЧХ соот-
ветствует частотной передаточной функции
О)2
(61)
414
а на интервале и><о2 —
И/Г7й) = адС^) = та. (б2)
(/a) J“
Положив в (61) и = иоп, |1У(7со)|=1, получим базовую
частоту иоп =yj К2, соответствующую точке пересечения
низкочастотной асимптоты с осью частот. Аналогично из
(62) получаем частоту среза ис = К2Т2.
Сдвиг всей ЛАЧХ параллельно самой себе вдоль оси час-
тот не меняет запаса устойчивости замкнутой системы, но
отражается на быстроте протекания переходных процессов и
точности воспроизведения входных сигналов.
В данном случае передаточная функция замкнутой системы
= К2(1<-Т2р)
1 + W(p) Р2 + К2т2р + к2 ’
а частотная передаточная функция
tj( • \ ^2 (1 "* ^27® )
Н (je>) =---п ,
(/со) + K2T2Ja> + К2
откуда
। гт( • м к I 1 (^2®)
|Я(/а)| = К2 -------
V (К2 - со2) + {К2Т2<о)2
При и = 0 |Я(/и)| = 1. Исследуя на максимум выраже-
ние для |Я(/и)|, находим квадрат частоты максимума
2 71 + 2К2Т2 -1
и квадрат максимума
Х22724 - 2К2Т2 -2 + 2^1 + 2К2Т2 ’
который убывает при увеличении Т2. Из последнего выра-
жения находим условие, которое необходимо выполнить
415
показатель колебательности не превосходил заданного зна-
чения М:
2 М2 - м2м2
2 > ®с М2 - 1
(63)
ЛАЧХ подобного вида (рис.9.9) находят ограниченное
применение при сравнительно малых значениях сооп и юС)
которые встречаются в системах сглаживания низкочастот-
ных помех [31].
ЛАЧХ типа 2-1-2 (рис.9.10)
соответствует передаточная
функция
(М>
/(1 + Г3р)
Такие ЛАЧХ называют-
ся симметричными ти-
повыми в связи с сим-
метричным расположе-
нием ЛФЧХ относительно запретной зоны.
При £о<со2 = 1/Г2 <со3 =1/Т3 асимптотическая ЛАЧХ соот-
ветствует частотной передаточной функции (61), а на интер-
вале со2<и<юз — функции (62). Положение всей ЛАЧХ по-
прежнему определяется базовой частотой сооп = у/К2 Протя-
женность участка с наклоном -20 дБ/дек определяется отно-
шением двух постоянных времени:
lgco3 -lgco2 = lg-3= lg/i = lg^. (65)
co2 T3
Исследование на максимум выражения для запаса по фазе
р = 180 + у = arctg о Т2 - arctg св Т3 (66)
дает частоту максимума
1 1
М " 7® T34h
(67)
416
и значение максимума
Иглах
, /77 . Й — 1
= arctgу h - arctg-= = arctg—.
-Jh 2>!h
(68)
Приравнивание максимального запаса по фазе pmax тре-
буемому максимальному запасу по фазе (59) дает связь меж-
ду протяженностью участка h и показателем колебательности
при оптимальном выборе параметров
t h-1 Jm2-1
arctg —= = arccos -———,
2х/й M
откуда имеем
h + 1. _ M а-I
M-l
(69)
M =
Оптимальный выбор параметров здесь означает, что при
заданном значении h будет получен минимальный показа-
тель колебательности и, наоборот, при заданном М получа-
ется минимальная протяженность участка h.
Как было отмечено, требования к ЛАЧХ разомкнутой
системы обусловлены тем, что амплитудо-фазочастотная ха-
рактеристика (АФЧХ) не должна заходить в запретную об-
ласть (рис.9.6,б), на границе которой справедливо равенство
(57), а модуль частотной передаточной функции разомкнутой
системы |Ил(/го)| = /С. Следовательно, с учетом (56) на гра-
нице запретной области имеем
Л(а) = ^
со
1 + (7»2
1 + (7»2
М2
М2 -1'
В частности, на частоте юм максимума запаса по фазе
Л(<ом) = ~2
Н + (^м)2 _
Н + (?зГОм)2
л/2
М2 -1’
417
откуда с учетом (67) получим:
а с учетом (65) и (69) —
т2 = =
1 М = 1 м
/К2 V м-l а>оп \ М - Г
1 /М(М-1)
®оп М + 1
(70)
При подстановке значений
постоянных времени (70) в
выражение для АЧХ найдем
|^0Ъ)| = Л(ш) =
В частности,
А(а2) = К2Г2\ - -2-. _
Vl + 1/Л2
1. f ю Г м
юопУ М-1
® 7 1 й \гМ(М-1)
I 1®оп J (М + I)2
М М + 1 М
М - 1 М2 +1 < М -1 ’
Л(со3) = ВД2Д?
М М2 + 1 м
М + 1 М + 1 > М +1
Следовательно, интервал частот h располагается внутри
диапазона, занимаемого запретной областью. При М, близ-
ком к 1, эти интервалы частот примерно совпадают.
Если запретная область рассчитывается по асимптотиче-
ской ЛАЧХ, то поскольку для асимптотической ЛАЧХ при
го < <о2 Я(го) = K-Ju2, а приго>го3 Л(го)= с
учетом (70) имеем:
А( \—^2_Г'гГ2 л ( \ '^2^2 V 'Г т
А\а2)~ 2 -К2Т2 --- А (ю3)~——-^-К2Т2Т2 - ——-
а2 М-1 Т3а2 М + 1
т.е. интервал частот h примерно совпадает с диапазоном, за-
нимаемым запретной областью.
418
Системы с астатизмом первого порядка (рис.9.11). В про-
стейшем случае передаточная функция разомкнутой системы
<71>
Частотная переда-
точная функция замкну-
той системы
К,
Я(» = — 2- -
Ку - Tjo + ja
Исследуя на максимум АЧХ замкнутой системы
П<о2)2-нсо2’
|Я(/Ъ)| =
находим частоту максимума
юм =
2КуТу -1
2Т2
и значения максимума
= м = 2К'Г>- .
4лКхТу -1
Тогда оптимальная постоянная времени определяется из
выражения
„ ~ М2 + Му1м2-1
-
(72)
2
а чтобы показатель колебательности не превышал значения
М, необходимо выполнение условия
„ ~ М2 + Му1м2-1
ЛИ1 - j -----
Зависимость требуемого запаса по фазе от частоты (границы
запретной области) строится по формуле (57), в которую вместо
А подставляется выражение
Л(ю)=|^и<о)| = —
toJl + C
419
ЛАЧХ типа 1-2-1-2 (рис.9.12) соответствует передаточной
функции
W(n} - ^l(1 + 72g)_
^W-p(l + 7ip)(l + 73p)
(73)
и относится к характеристикам симметричного вида.
Система с такой ЛАЧХ имеет астатизм первого порядка.
но позволяет иметь более
высокий общий коэффици-
ент усиления. Обычно со-
прягающая частота со, = 1/7’,
значительно меньше часто-
ты максимума требуемого
запаса по фазе. Поэтому с большой степенью точности здесь
могут быть использованы формулы (65) - (70), где
®оп = № = ®С = К. = К2Т2 = а2опТ2. (74)
В соответствии с формулами (70) имеем
^ОП
г^г. т 1 4м(м-\}
М - 1 ’ 3 сооп М + 1
(75)
Можно также учесть влияние нескольких инерционных
звеньев с малыми постоянными времени 7]. Для этого мож-
но несколько уменьшить постоянную времени 7з и отодви-
нуть ФЧХ системы от запретной области. Тогда формула для
определения 7з приобретает вид
Vr - г < 1
(76)
При более точном расчете можно учесть дополнитель-
ный запас по фазе по сравнению с системой, имеющей аста-
тизм второго порядка:
Ар = arctg—. (77)
со 1,
420
Это обстоятельство позволяет немного увеличить допус-
тимую сумму постоянных времени Тх, определяемую форму-
лой (76), или немного уменьшить требуемое значение посто-
янной ?2, определяемое формулой (75).
ЛАЧХтипа 0-1-2 (рис.9.13) соответствует простейшей стати-
ческой системе с передаточной функцией разомкнутой системы
(1 + Т0р)(1 + 7>)
(78)
где К — общий коэффициент усиления; Tq — наибольшая по-
стоянная времени.
При больших зна-
чениях общего коэф-
фициента усиления пе-
редаточная функция
(78) в окрестности точ-
ки пересечения ЛАЧХ
оси частот может быть
приближенно сведена к передаточной функции системы с
астатизмом первого порядка (71), где базовая частота ЛАЧХ
Jo
Это позволяет использовать полученную ранее формулу
(72) при замене Кх на K/Tq. Тогда условие получения задан-
ного запаса устойчивости имеет вид
ед < М2 + м^м2 -1
то ~ 2
(80)
Для передаточной функции более сложного вида
-—
i=0
(81)
421
имеем условие
К Nt <М2 + М^ М1
тп ~ 2
уо j=i z
(82)
которое дает достаточно точные результаты при М< 1,3 [31].
Из выражений (80) или (82) видно, что увеличение пер-
вой большой постоянной времени То увеличивает запас ус-
тойчивости, а при заданном запасе устойчивости позволяет
увеличить общий коэффициент усиления К.
Отличие передаточной функции (71) в области низких
частот от ее точного выражения (78) приводит при использо-
вании расчетных формул (80) или (82) к некоторому незна-
чительному дополнительному запасу устойчивости.
ЛАЧХ типа 0-1-2-I-2 (рис.9.14) используется при повы-
шенных требованиях к точности системы. Ей соответствует
передаточная функция
_______^(1 + Т2р)
(l + Top)(l + TlP)(l + T3p)
(83)
Базовая частота
ЛАЧХ
“оп = — (84)
ОП rji rri х '
/0Jl
В существенной для
динамики системы об-
ласти частот ш>©1>1/7[) передаточная функция (83) сводит-
ся к ранее рассмотренной функции (64), где
^2 “ > шоп - 4^2 »
и могут быть использованы формулы (70).
В частности,
т _ _1 М _ | Т^\М
2 0JonW-l 1|/Г(М-1)’
(85)
(86)
422
г - Vr. < 1 ylM(M- l) _ ImM-l)
2 “з ' “on M + 1
—---------(87)
К(М +1)2
где формула (87) записана для случая, когда кроме инерци-
онного звена с постоянной времени ?з имеются другие
инерционные звенья с постоянными Т4< Т3, Тп< Тп^.
Системы, содержащие колебательные звенья
В случае низкочастотного колебательного звена практи-
чески только ЛАЧХ
симметричного вида
(рис.9.15) дает прием-
лемые результаты.
Приведенной ЛАЧХ
соответствует переда-
точная функция ра-
зомкнутой системы
ич,)=7----------------------------------
(1 + 2г,.тоР + Г0У )(1 + Т3р)-•. (1 + '/„Р)
Для расчетов, связанных с получением требуемого запаса
устойчивости, передаточная функция (88) может быть заме-
нена эквивалентной функцией
ИДр) = АГ2(1 + Т2д) , (89)
р2(1+тзР)-(1+ад
где
v _ к.
*2 2 , ©оп
'о
Расчеты могут производиться по формулам (70):
I т*м . т
УК(М-1)’ 1 ' Л: М + 1
(90)
(91)
423
Отличие ФЧХ, соответствующей передаточной функции
(88), от ФЧХ для функции (89)
V = -180° + arctgwT2 - ^arctgcoT], (92)
i=3
изображенной на рис.9.15 штриховой линией, дает некото-
рый дополнительный запас устойчивости [31].
9.4. Синтез импульсных преобразователей частотным методом
В дискретных системах возможно использование рас-
смотренных ранее типовых ЛАЧХ с учетом особенностей,
вносимых дискретностью.
Низкочастотная часть ЛАЧХ выбирается исходя из условий
обеспечения заданной точности воспроизведения входных сиг-
налов [31]. При этом предполагается, что для частот, которые
определяют расположение запретной области по точности, кру-
говая частота со практически совпадает с псевдочастотой А, т.е.
-1 2 . аТ _ .
А. =-arctg—«со. (93)
Построение средне- и высокочастотной части желаемой
ЛАЧХ производится в соответствии с изложенным, но с уче-
том особенностей построения ЛАЧХ дискретных систем, ко-
торые сводятся к методике учета малых постоянных времени
и к учету эффекта транспонирования частот в колебательных
и консервативных звеньях [31].
Если постоянная времени колебательного звена То удовле-
творяет условию То»Т/2, то нахождение дискретной переда-
точной функции и построение ЛАЧХ не вызывает затруднений.
Для импульсного преобразователя с отрицательными обрат-
ными связями по выходному напряжению и току дросселя
фильтра дискретная передаточная функция разомкнутой системы
определяется формулами (6.42), (6.43). Учитывая, что импульсный
элемент срабатывает при e=yi = из (6.42) получаем:
(z, Yi) = К ------5-, (94)
Z2 - 2zd cos a0T + d2
424
где а = е
Т2 ’
7Ф
cos(l+y] -у>0Т+—I-
С)о V
В = d2^l~y - cos(y - yi)ra07 + —
« Sb(l+Yi-Y>o^
OX /
fl)
--а Шу-у^Г
vox )
(95)
Из (94) подстановкой z = (l+w)/(l-w) и заменой w = j’kT/l
найдем псевдочастотную передаточную функцию разомкну-
той системы:
и^ь) =----------- ’
l + 2W^ + ^2(/^)
(96)
где
/Г(Л + В) А-ВТ,
э l-ldc^T + d2’ 4 А + В V
^2 _ 1 + 2d cosa0T+d2 ГГ)2. ____1 - d2____
l-2jcos®0T+d2l2j ’ э ^+rf2y_(2dcoSQ)or)2
В случае отсутствия запаздывания при включении регу-
лирующего транзистора у] = у, заменяя sinx, cosx, е х пер-
выми членами их разложений в степенные ряды, получаем:
1(1 1 „ ,
А + В = d cosonT + — —---a sincoor - d
«о
L
о.с
, ьп2
2
sin са0Т
+1 ? - ат |^- - (1 - аТ) « ~
\ ох
7 L-
то.с 2 тос
_ ' „ т
ю0Т
А - В = d cosco07 + — j —a lsincooT + d «2 + -^-;
и0 Vо.с ) J 7°с
f т у
1 - 2J cos й)0Г + d2^ (1 - d)2+ 2d(l - cos a0T)^ (a.T)2+ (®0г)2= у
\7Ф>
OX
1
\-^о.с
о с
1 + 2Jcosa>07’ +</2 = (1—</)2 + 2б/(1 + cosci)07') ® 4 - 4аТ «4,
425
где на основании формулы (6.25) имеем
Т _ ^от Т
Т^О.С ^0т
(98)
С учетом этих равенств из выражений (97) найдем:
Кэ « Fv^K^/R + Ко); тэ « Тох + Т/2;
т ~ ~ т г ~ _ а
7э ~ ~ Уф , С,э ~ _ «л “
(0q ZCOqj COq
аЗф = Q-
(99)
Следовательно, при аТ«1, са0Т«1 псевдочастотная
передаточная функция разомкнутой системы (96) отличается
от частотной передаточной функции линейной непрерывной
части, получаемой с учетом (6.1) и (6.24),
= SMFU^U^oAj^ =
_т1(ад/д+^0)(1+7-тто,с)
1 + 2^Гф>+^(»2
наличием множителя i-j’kT/l и отсутствием множителя Т
в числителе (96).
Если условия а.Т « 1, сооГ« 1 не выполняются, то не-
обходимо пользоваться точным выражением (96).
Поскольку для хорошего сглаживания пульсаций выход-
ного напряжения ППН должно выполнятся условие 7ф> Г, в
областях средних и высоких частот выражение (96) может
быть заменено эквивалентным
^э(1+Дт3)(1-Л7/2)
7э2(А)2
(101)
Передаточной функции (96) соответствует ЛАЧХ, изо-
браженная на рис.9.16, где - в областях низких
и средних частот построение ЛАЧХ дискретной системы не
426
имеет никаких особенностей по сравнению с ЛАЧХ линейной
непрерывной части, соответствующей выражению (100) [31].
Правее частоты 2/Т, т.е. в области высоких частот, асим-
птотическая ЛАЧХ дискретной системы (рис.9.16) имеет по-
следнюю асимптоту с
нулевым наклоном. Со-
пряжение этой асим-
птоты со среднечастот-
ной частью может быть
различным, однако ход
ЛАЧХ в высокочастот-
ной области не имеет
практического значения.
Важно, чтобы вид ЛАЧХ правее частоты среза ®с ® Хс отвечал
бы условию ограничения суммы малых постоянных времени в
соответствии с формулами § 9.3. Кроме того, должно быть на-
ложено ограничение на высоту резонансных пиков в области
высоких частот, если фазовый сдвиг, который имеет система
без учета рассматриваемого колебательного звена, в районе пи-
ка лежит в пределах 0<|\р|<18СГ [31].
В низкочастотной и среднечастотной областях ЛАЧХ дискрет-
ной системы должна совпадать с какой-либо типовой ЛАЧХ сим-
метричного или несимметричного вида из рассмотренных в § 9.3.
Частотная передаточная функция разомкнутого ППН в
области средних частот записывается в виде
аналогичном (60). Поэтому справедливо условие, которое
необходимо выполнить, чтобы показатель колебательности
не превосходил заданного значения М:
2 м2 -л/Ул/2 -1
> М2 - 1
(102)
427
Это условие получается из (63) при замене на тэ и
Ч = K3tJT2
Импульсный преобразователь
с асинхронным интегральным ШИМ без сброса
Линейная импульсная модель такого преобразователя
(рис.9.17) получается из схемы на рис.5.10 исключением
контура с импульсным элементом ИЭЗ. Время будем отсчи
тывать от момента срабатывания импульсного элемента ИЭ1.
где с учетом (5.29)
“ Г„ ’хАр(1-,)- <106)
Представляя функцию (105) в виде суммы простых дро-
бей, с учетом (6.52) получаем:
W\p)=K0
р+^а + p+Ki/ч '
(Р + а)2 + Юр Иф J (р + а)2 + ш2
Рис.9.17
\2
Т1 р + а
) J (р + а)2 + Юр
ч
1
— a +
2
Передаточная функция цепи обратной связи
w'oxW» +1)
получается после очевидных преобразований линейной не-
прерывной части. Отсюда получаем
T/Z ( X V (l ^2-^Др L К2Кдр , _э")
WZo.c(/’)= ^11 1 + ~RP .LCP 1 =
= АГ1(1 + 2^Т1Р + Т?Р2), (103)
где
т, . ДЬчС; с, = q. (104)
где
со0
ТФ
J (p + a)2 + cop
Смешенное ^-преобразование для W(p):
со0
W(z,в) = Ко - Ly- —,
(г - 1)(? - 2zdcosffi0T + d2)
Л(е) = 1 + бГ
_£Г
®о L'
Ji.
2Z
2
- 1 COSEffinT’ —
'о
(107)
В (е)=-2 d cos а0Т - d£
Ti
Тф
ТЛ_ ^2 ’
-1 [coSEto07, + rfcos(l-E)cap7r,]+
И
РФ
1
2
ю0
а +
ТФ
2
- 1 COS (1 - E^pT +
Передаточная функция линейной непрерывной части
(при ?з2 = 0)
W(p) = Ap(_1+-2jiL^ + Ti^2\ (105)
р(1 + 2^Гфр + Тф2р2)
C(E) = d2+d
т*
2
1
со0
T1
sin (1-£>0ТЧ.
428
429
С учетом запаздывания при выключении регулирующего
транзистора при 0 < е < уз2 имеем:
^,2 к’е) = ZI е~Р'“ I= Z (г, 1 + е - у) =
= к ^(i + £-Y3z)^2 + ^(1 + £-уз2)г + С(1 + £-Уз2)
(z ~ 1 ){z2 - 2zdcosto0T + d2)
откуда для моментов срабатывания импульсного элемента ИЭ1 е=0
^Гз2(г,°) = Х0
Az2 +Bz + C
(z-1 )(z2 - 2zdcosa>0T + d2)
(108)
где
A = Л(1 - уз2) = 1 rd1”™
со8(1-уз2)й0Г-
1
co0
sinQ-YsJcooT7
В = 5(1 - уз2) = -2d cos<o0r -
~dWs2
2
-1 [cos(l-y32)ffi07’ + dcosy32ffio^ +
>2/
1
®o
Ti
ГФ
8ш(1-уз2)ЮоТ] k(109)
C=C(l-y32) = d2+d2-^
4
Л.
2 -]
— 1 COSy^CtoQ?1 +
f Г X
fid fa-2^-]
smy32to0T
1
+ — a +
coo _
Частотная передаточная функция разомкнутой системы
Делая в (108) подстановку
Z =
1 + w
1 - w
430
и замену w=j'ZT/2, получаем псевдочастотную передаточ-
ную функцию разомкнутой системы:
*ПА) = Кэ i-------------—----Ц----------, (110)
А[1 + 2^2TJ\ + Тэ2(Д)2]
где
к _Kq_____А + В + С 2 Л-Д+СГП2
3 Т l-2rfcosco07" + d2 э Л + 2? + Са2/
, .^С-= - (Ш)
4{А + В + С)(А-В + С)
у,2_l + 2Jcosffi07’ + dz <7”\2 _ 1-d2
1 - 2d cosа0Т + d2 12 J J(l+d2)2-(2rfcosco0r)2
Как видно из (111) и (97), постоянн я времени Тэ и ко-
эффициент затухания £з2 знаменателя функции (ПО) опреде-
ляются так же, как и в схеме с обратными связями по вы-
ходному напряжению и току дросселя фильтра.
Учитывая выражения (109), находим:
А + В + С = l-2dcos(q0T + d2;
A-B + C = l + 2d cosa>0T + d2 +
+ 2dx~™-
т
k Ф/
[cos (1 - Уз2)о>0^ + d COS Уз2®0^ “
1
coo
(
[sin(l - Y3Z)<aor - sinY32®o^]n
(H2)
a +
A-C=\-d\d^.
[cos(l-Y32)coo71-cf COSY32®0^]-
---- (Х +
CO0
1
[sin(l - y32)coo^ + ^япузг^о^ ]
431
Отсюда
(ИЗ)
Кэ = к0/т.
Заменяя функции sinx, cosx, е~л первыми членами их
разложений в степенные ряды, упрощаем выражения (112) и (111):
2
А + В + С = 1 - 2rfcos ф0Т + d2 « (а7)2 + (ю0Т)2 = [у
1 + 2dcos<B071 + d2 ® 4 - 4аТ « 4;
(г/ л 2 -><-
Т
ТФ) ’
Л-В+С«4+2
Ауфу
V/
а
<^Ф>
-2—| [(1- уз2)юо^- Г32“оЛ “
«4 + 4
Т1
|1Л.
\2
3_
г А-С т2
^Э1 “ 27т, ф'
Учитывая (112), получаем:
2
I "I
т2«4
±1<1 = к Ё! + ^2-Уз2
Ю0Т (£>0Т
7ф
(l-d)cosy32co0T 1 1
<й0Г
<оо
Тф
(114)
cos(l-y32)coo7-cosY32co0r
®qT
1
а RC
sin(l-уз2)т0Т + sin уз2ю0Г - (1 - J)siny32o0T ]
х J ~
2а
®о
а 1
®о ио
-1
сооЛС^Тф
2
2
1
®0
2
2
2
21_
. .хФ >
2
Т
2
I
т Y,
—
ф >
а +
|¥ 1 '
!(“ RC
1
2
432
А-С <в07ф ~ 1 Г ЮрТф Т]
а0Т 2?! ~<oo7?C^J 2т, 2RC~^' V ’
Таким образом, при аТ«1, сорт«1 в областях низких и
средних частот, где Х<2/7, параметры псевдочастотной пере-
даточной функции (ПО) £э1, тэ, £э2, Тэ близки к параметрам
передаточной функции линейной непрерывной части ть
С,, 7ф. Согласно (113) коэффициент усиления Кэ отличается
от Хо в 7 раз, что соответствует усреднению коэффициента
передачи импульсного элемента ИЭ1 (рис.9.17).
Логарифмические частотные характеристики разомкну-
той системы (рис. 9.18) соответствуют частотной передаточ-
ной функции (НО). ФЧХ определяется выражением
w=-90° +arctg -arete -arete»?-,, (116)
где в простейшем случае Т3=Т/2.
В области низких частот, в которой
?.~ш< 1/Тэ< А-! =1/тэ , асимптотическая ЛАЧХ строится по
формуле
в диапазоне частот
1/Тэ<Х<А,1 — по формуле
»Ч/Х) =
откуда получается базо-
вая частота
7-е
(Н7)
433
В диапазоне TqOXXj = 1/73 асимптотическая ЛАЧХ со-
ответствует частотной передаточной функции
JK т2 1
ОВД
где значение частоты среза
J7 т2
= (119)
На частотах к>1/Тэ частотная передаточная функция
(ПО) принимает вид
, . [1 + 2Сэ1тэД + тКА)2](1-уХТ3)
W(jX) = Кэ --27~ v ” — • (12°)
(УМ
Функции (120) соответствует ФЧХ
ц/ - -270° + arctg _ arctg).Т3
1 /л- *1 V
и запас по фазе
И = 180° +у = -90° + arctg--arctg\Т3. (121)
Связь параметров частотных характеристик
с показателем колебательности
Для определения связи ц и М упростим выражение (121),
пользуясь тем, что обычно частота мала по сравнению с
частотой км максимума запаса по фазе мтах. В этом случае
вблизи частоты Хм имеется возможность заменить диффе-
ренцирующее звено второго порядка в числителе (120) диф-
ференцирующим звеном первого порядка [58].
Известно, что если tg а = р, то
7С 1
а = arctg р = — arcctg р = 90° - arctg -. (122)
2 р
Пользуясь этим равенством, найдем:
arctg—
1-(гэХ)2
пло * 1-(т к)2
=90 - arctg v
=90° - arctg
1___
АэПэк 2^J
434
В диапазоне, в котором X»Ii=1/тэ, приближенно имеем
I тэХ ~ тэХ
2^.^ " 2Сэ7 “ ’
поэтому
arctg « 90° + arctg — , (123)
1 — (тэ^) 2^3j
и из (121) следует приближенное равенство
р = arctg - arctg Л. Т3. (124)
2£Э1
можем
(125)
(126)
После нахождения численных значений параметров пе-
редаточной функции (120) из условий обеспечения требуе-
мого показателя колебательности целесообразно проверить
справедливость приближенного равенства (123).
Замечая, что равенство (124) при замене тэ/(2£э1) на Г2
совпадает с (66), частоту максимума запаса по фазе
определять по формуле (67), где h заменяется на
й' = —= —, й = Ь-,
2Сэ1Г3 2£э) Т3
х 1 1 _1 э
М /Т2Т3 Т3/^ т3\ h тэ ’
где Т2=тэ/(2СЭ1)-
Значение максимума запаса по фазе определяется по
формуле (68) при замене Л на А':
ц"“ = ,гс1е-г7ГаГС18Ц&- °2”
Справедливы также формулы, аналогичные (69):
h' + 1 h + 2Q , М +1
= и or ; h = 2^э1 Yf- 7
h - 1 п - 2£э1 М - 1
(128)
435
Определение параметров желаемой ЛАЧХ
Формирование характеристик импульсного преобразователя
будем производить так, чтобы запретная зона по показателю ко-
лебательности и ФЧХ разомкнутой системы имели общую точку,
соответствующую запасу по фазе р.тах (рис.9.18), причем, как бы-
ло отмечено при получении формулы (59), на частоте максимума
Х=?.м АЧХ проходит через значение И(А.М)= JC = М/М2-1.
Тогда, подставляя Z.=XM в выражение (118), с учетом
(119) получаем:
Л(ХМ) =
Хэт2 Л.,
тХ
связь
к
между частотами среза и
Следовательно, получается
максимума запаса по фазе
к = -
м
(129)
К-
1
Например, если Л/=1,5, то имеем Z.C=1,34Z.M, т.е. часто-
та среза ?.с близка к ?.м.
Приравнивая выражение
(130)
|2^э1 1
(131)
jr-I
М с’
получаемое из (129), выражениям (126), приходим к формулам
т3 = ~у—— /2^А —,
т =__________________м
3 у!м2 -1 h К’
связывающим искомые постоянные временитэ, 7з с частотой среза Хс-
Решая уравнения (119), (130) относительно тэ, получаем
расчетную формулу
? = Тэг = Mjl^h 1
>]м2 - 1 л/л/2 - 1 ^-б
где постоянная времени Тэ^ 7ф и коэффициент Кэ считаются
известными.
(132)
436
После определения значения тэ по формуле (119) рас-
считываем частоту Хс, а затем по формуле (131) — постоян-
ную времени Ту
Приравнивая значения АЧХ Л(Л.) = на левой и пра-
вой граничных частотах запретной зоны значениям М/(М-1)
и М/(М+1), согласно функции (118) с учетом (119) найдем:
. М-1. . _М + 1.
" М Хс’ Хгр2 - М ^с’
откуда, учитывая формулы (130), (131), получаем:
- V 2^hм^1 Xl’ - V “Г м +14
где ?.] = 1ДЭ; Х3 = 1/Г3. Принимая во внимание равенство
(128), окончательно будем иметь:
= озз)
Поскольку согласно рис.9.18 требуется, чтобы Xipl >Xt,
приходим к необходимому условию
^Э1>0,5. (134)
Если Сэ1иС1> то согласно (134) и (104) необходимо вы-
полнение условия:
(135)
v А1
9.5. Оптимальный синтез устройств управления
импульсными преобразователями
Известна методика синтеза устройства управления им-
пульсным ППН, которая сводится к определению оптималь-
ных процессов в силовой части ППН (объекте регулирова-
ния) с помощью точных математических моделей силовой
части и последующему синтезу закона и схемы управления,
обеспечивающих приближение процессов в ППН с регулято-
ром данной структуры к оптимальным процессам [59].
437
При определении оптимального процесса в силовой части на
каждом периоде дискретизации переходного процесса находится
оптимальное значение длительности включенного состояния ре-
гулирующего транзистора путем минимизации функционала
J = Ах- [(« + 1)Т]РДхф[(» + 1)7"], (136)
где ДХф(и7’)=Хф(иТ’)-Хфуст(иТ) — разность дискретных зна-
чений вектора состояния силовой части в переходном и устано-
вившемся процессах (вектор невязки); P=diag(pn,p22) — сим-
метричная положительно определенная матрица (матрица ве-
сов). Поскольку вектор Хфуст(и7) задан при всех и, а вектор
ХФ[(« + 1)Л является функцией значения Хф(л7) и интервала
времени /Ои, то оптимальное время определяется методом
одномерного поиска. Текущий квадратичный критерий J ха-
рактеризует близость вектора состояния к желаемому.
На рис.9.19 в качестве примера показана расчетная зави-
симость величины
J = Р\ 1 {*1 [(« + 1)тп1 - *1уст }2 + Р22 {*2 [(л + 0Тп ] - *2уст }2 (137)
от для понижающего ППН с параметрами бд=10;
При других начальных
4=46=0,2; JLC/T=2,S-, V1=l;
v2=0; Pi i=l; P22=10; желаемые
значения координат
х1уст=0,451904; х2уст=0,677376;
ууст=0,676361; начальные зна-
чения координат х1(т„)=0,7;
х2(тп)=0,66. Значения
Х1[(и+1)тп], х2[(и+1)тп] вычис-
лялись по формуле (1.45) при
гс=0, Ql~Qo-
значениях координат Xi(ni:n),
*2(mn) величина J может не иметь минимума в интервале
(0, Утах), а достигать наименьшего значения на одной из
438
границ этого интервала. В этих случаях требуется либо пол-
ное выключение регулирующего транзистора (у=0), либо его
включение на максимальное время утах.
В случае неустойчивости найденного процесса необходимо
изменить элементы матрицы Р и повторить процесс поиска оп-
тимального процесса. Один из элементов матрицы Р можно
принять равным 1, а другой искать из условия устойчивости.
После определения оптимальных процессов решается за-
дача синтеза устройства управления, обеспечивающего про-
цессы, близкие к найденным оптимальным.
Для определения оптимального значения времени <Ь„
найдем производную функционала (136)
dJ ______dJ______JAxJ(n + 1)7j
dtQn d&x.^ [(и + 1)7 ]
определяемую в предположении постоянства на рассматри-
ваемом периоде значений Хф(л7), Тф(«7) и ТфВ(л7).
Учтем, что производная квадратичной формы хтАх по
вектору х определяется выражением
d(xTAx) = 2(Ax)T (138)
dx
Тогда
- f 2(РЛХф[(„ ♦1)7-1)’ = 2ДхЦ(„ + 1)Г]Р’,
</Хф1(л + 1)7]
где РТ=Р, поэтому
= 2Лх1[(л + 1)7]Р^Й^З. (139)
dt^f,
Полагая, что Хфуст(лТ)=Хфуст =const, найдем производ-
ную выражения (1.17):
£Ахф[(и+1)7]=^Хф[(л+])7]=_ ДВф(Г-7д„)г _Уф в(„/)], (ЦО)
б^0л &0п
439
где Уф = Уф (и 7)=const; уфв =|| 0, /нл ]т — значение вектора возму-
щений, действующих на ZC-филыр при выключенном транзисторе;
^ф(пТ)-УфВ(пТ) =
Ивх(«Л
О
производная матрицы Вф(?) вычисляется аналогично (7).
Дифференцируя выражение (1.13), находим:
^Вф(0_ JQ(/)A
dt dt
-1 В _ _^Г,Ан-фИа-1 В
н.ф°н.ф - д /Пн.ф°
н.ф
= ^^'Ан.фА^фВн.ф Ф(?)Внф,
(141)
где матрицы Анф, А’'ф коммутативны с еЛнф/
Из (141) с учетом (1.3) найдем
^вф(0
dt
1фц0 -1ф120
С-
у®21 И "рФдЙ
А-/ С-
(142)
Уравнение для определения оптимального значения Гои с
учетом (139) - (141) и (1.17) запишется следующим образом:
{ф(Пхф(иТ)+Вф(Г)уф(и7’)-Вф(Т-г0„)[уф(»7)-уф.в(иГ)]-
- хф.усг(»Т)}ТРФ(Т - tOn)Вн.ф[уф(пТ) - уф,в («Г)] = 0. (143)
Это уравнение справедливо только в режиме непрерывного
тока дросселя фильтра и отсутствии ограничений времени
Таким образом, построение переходных процессов, удовле-
творяющих условию минимума критерия (136), сводится к
вычислению последовательности значений времени tOn путем
решения нелинейного уравнения (143) на каждом и-м пе-
риоде дискретизации и подстановке этих значений в выра-
жение (1.17) для вычисления значений вектора состояния.
Если решение уравнения (143) на интервале 0 < t$n < ymaxT
отсутствует, то принимается одно из граничных значений /Ои.
440
Линейная модель импульсного преобразователя
с оптимальным управлением
Для упрощения дальнейших преобразований введем обо-
значения
Г.[хф(«П *Ф(«П УфАпТ), д/Оп]=Ф(Т)хф(лТ)+Вф(Пуф(/?7)-
-Вф(Г-/Оя)[¥ф(«7)-¥фВ(«7)] -хф.уст(«Л; (144)
^[*Ф(«П Уф.в(иТ), Д,о„] = РФ(Т- Г0я)Вн.ф[уф(«7’)- тфв(«Т)]
и запишем уравнение (143) в виде
f]Tf2=0, (145)
где для сокращения записи векторы f( и f? записаны без аргументов.
В частности, уравнение (145) справедливо и для устано-
вившего (стационарного) режима.
В возмущенном режиме уравнение (145) можно записать так:
( 1уст + Д^1) ( ^2уст + д^) = 0 >
гДе flyer и ^2уст — значения векторов fi и f2 в установившемся
режиме; Afj и Af2 — отклонения векторов fj и f2 от устано-
вившихся значений под действием возмущений.
Пользуясь правилом транспонирования суммы матриц,
запишем уравнение.
flTyCTf2ycr + flyer Af2 + ^уст + AfMf2 = °>
вычитая из которого уравнение установившегося режима,
получаем:
f^Af.+Af^+Af^^O.
Для малых отклонений от установившегося режима имеем:
firyCTAf2+Af1Tf2yCT=O, (146)
где с учетом (144) справедливы выражения
441
ЛГ1=Ф(7)ДХф(л7)+Вф(^Д¥ф(л7)-Вф(Т-/Опусг)[Д¥ф(л7)-
-Дуф.(„7)]-аВ(Г-'->
dr0n
['ф.уетО^ ^0 ^Ф в.уст(^ 7}]’
^Оп=^Олуст
дг2=р
S®(T-ion)
&Оп
^Ол ~ ^Опуст
(147)
^Оп ®н.фКф.усгХ^ "О хф.в.уст(^7)]+
+рф(7’-/Опуст)вн.ф^ф(и 7) - ДУфв(л7)],
а установившееся значение вектора f( в соответствии с ра-
венством (1.17) обращается в нуль:
Луст = Ф(^)хф.уст(л^) + Вф(7’)тфуст(л7’)-
— Вф( — ^Олуст)[хф.уст0г^') — Хф.В.ует(,7^Г')]— хф.уст(й^) = 0-
Тогда уравнение (146) упрощается:
AfJTf2yCT=0, f2TyCTAfi=O
и с учетом равенств (147), (141) принимает вид
{Рф(Т’- /Оиусг)Внф [уФуст(л7’)- Уф.в.ус1(лТ)] Г {Ф(Т)ахф(лТ) +
+ Вф(Т)Дуф(лТ)- вф(т - /олуСТ)Ьф(«П-А*ф.в(«П ] +
+ Ф(Г -^уст)Вн.ф[*ф.Уст(«П -’ф.в.уст^Лкол} = о, (148)
где Дуф(лТ)- Дуфв(пТ) = ^ивх(пТ)е; с учетом (1.3)
Вн.ф[хф.уст(«7’) - хф.в.уст(«7’)] = ~«вх.уст(«'г)е; (149)
е = |<-
Из уравнения (148) с учетом (149) находим
^Оп = -^^ф(пТ)-^&Ч(ПТ)Л^лига(пТ), (150)
^фе ^фе ^фе
442
где
g(J)1 = етФт(Т-^Оиуст)РФ(Л;
8ф2=етФт(Т-/0иуст)РВф(Т);
Рфе = етФт(Т - ,Ойуст)РВф(т - t0/iycr)e; (151)
<хфе = -7Ивхуст(лТ)етФт(7’ - ?Опуст)РФ(г - гОпуст)е.
J-J
Как видно из (151), g^, - матрицы-строки; афе и рфе -
некоторые квадратичные формы от вектора е.
Линеаризуя уравнение (1.17), с учетом формул (141),
(149) получаем равенство
Дхф [ (п +1) Т\ = Ф (Т) Дхф (п Т) + Вф (Г) Дтф (пТ) -
-Вф(Т
^Опуст ) е Д«вх (п Т) + | авх усг (п Т) Ф (Г О пуст )е Д*0л >
при подстановке в которое выражения (150) приходим к раз-
ностному уравнению:
Дхф[(л + 1)Г] = С’дхф(пТ) + П'Д¥ф(лТ)+ Ь’дМвДпТ), (152)
где
С =
С\1 С'2 = Ф (Л - «вх.уст (« Л Ф (Т’ - 'олуст ) е g ф! ;
С21 c22ll Ьафе
D'=ll!1 1!2|=вф(Л-г1-«„(«ЛФ(^-^ст)^ф2; (153)
II «21 «22II ЬаФе
h =| =У «вхуст(и Л Ф(^ — ^Олуст)еРфе ~Рф(7'~^0луст)е’
II «2 ^афе
далее будем считать, что возмущения в установившемся ре-
жиме постоянны во времени, т.е. «Вх.Уст(л^)=^вх>
/н.д.уст(лЛ=Л.д- Тогда Wr=f0ycr= const. В противном слу-
чае оптимальная система описывается разностным уравнени-
ем с переменными параметрами.
443
Преобразуем выражения (151):
g$t = ||4i’4i||’ 4i = a'aJt’ ~'оуст)фп(г)+
+ /?22Ф21(^ ~ ?0уст)Ф21 СО;
41 = А1ф11(^ ~ *0уст)Ф12СО+ P22®21fr ~ *0уст)Ф22(О;
§ф2 = |^ф2>^фг|; 42 = Л1Ф11(^ -^0уст)^ф11СО+
+ Р22Ф21 ~ ?0уст)^ф21 СО; (154)
ёф2 = А1Ф11 “ *0уст)^ф12СО+ P22®21fr ~ ?0усг)^ф22СО;
Рфе = А1Ф11(^ “ ^0уст)^ф11(^ ~ ?0уст) +
+ P22®21(f ^0уст)^ф21 С?" А)устЛ
«фе = ~^[а1Ф11(^ - ^Оуст)+ Р22Ф21(^ ~ *Ьуст)] -
Из выражений (153) с учетом (154) и очевидных ра-
венств е g$1 = J * J j g^ g|] j=I 8& g*1 j; e g(1)2 = |8*2 8^2 J най-
дем элементы матриц, входящих в уравнение (152):
с[! = Ф11(71)- Ф4Г-?0устН1. с’2 =ф12(г)- Ф^Т~^)8ф1 .
афе афе
с'! =Ф2](0 - Ф^(Г~/оуст)41 . с'2=ф22(т) - Ф.21(Г-/оуст)41
афе афе
^1=бф11(г)_^!1Й^0усМ ; ^2=бф12(т)_Ф^->)42;
афе афе
яфе С^фе
= ~Т?~ Ф11С^ ~ ^Оуст) - ^ф11(^ “ ^Оуст);
афе
^2 ~ -7^Ф21(^ ~ ?0уст)“ ^ф21С^ ~ ?0уст)’
афе
444
где а,фе - - РцФп(^ ~ ^ОуСТ) + ~ ^Оуст)-
вх
Упростим формулы для элементов матрицы Якоби, по-
лученные после подстановки в (155) выражений (154), поль-
зуясь вспомогательными равенствами, основанными на тож-
дествах (7.43) и (7.45):
Ф21(^ “ *0уст)Фц(^) “ Фц(^- ?Оуст)Ф21 (^) =
= Ф21(Т’-^Оуст)<^11(^"^Оуст+/Оуст)_Ф11(^“^Оусг)Ф21(^_^Оуст+^Оуст)=
= ®21(^ “ ^Оуст)[Фц(^ " ^Оуст)Ф| 1(?0уст) + Ф]2^“ ^Оусг^^Оуст)]-
- Ф11(7 - Гоуст)[Ф21 ~ ?0уст)Ф11(1оуст) + ®22^ ~ ^Оуст)^21(^Оуст)] =
= [Фг 1 “ 1оуст)Ф12(^ - ^Оуст)- 1(^ ~ /0уст)Ф22(^- ^усг)]Ф21^0уст)=
=^(^21U=^l’TyCTWoyJ;
Ф21 (Г- *0уСТ)Ф12(Л - Фц(Т- 10уст)Ф22(П =
= Ф21(7-/Оуст)Ф12(7-?Оуст+^0усг)~ Фц(Г “ *0уст)Ф22(^_*0уст + ^0уст)=
= Ф21(Т- А)усг)[Ф11(^_ ^ОустОФ^ОустО+ФыС^- ^0уст)Ф22(^0уст)]“
- Ф11(^- 1оусг)[ф211оуст)Ф12(ГОуст)+ Фгг(^ -^0уст)Ф22^0уст)] =
= [ф21 (т - /Оуст ) Ф12 (т - ^Оуст ) - Ф11 (^ - *0уст ) Ф22 ~ ^Оуст )]фг2 (^Оуст )=
= = -^2(1’ТУСТ)Ф22^УСТ).
где d = е~аТ; ууст = гОуст /Т.
Тогда получим:
41 =-^?-к(1-ТУСг)ф21(Г-/0уст)Ф21(^0уст)];
афе
4г = -^-[i2(1-^21(r - 10уст)Ф22^уст)];
“фе (156)
4 = 4-^(1-Ууст)Фп(г - /оуст)ф21(^оуст)];
афе
с22 = ( Туст)фц(Т - 1оуст)Ф22^Оуст)]-
афе
445
Аналогично можно преобразовать и формулы (155) для
элементов матриц D' и h', однако и полученные соотноше-
ния вполне пригодны для расчетов.
Для преобразователя с оптимальным управлением из
(152) аналогично (7.51), (7.52) получим передаточные функции
по входному напряжению и дополнительному току нагрузки:
^вх U) = + h'), (157)
(Л/
ЛА,„(г)-^^-ет(г1-С>’.2. (158)
где =
^11 tv' ^12 I - ~ _
, ; D,2 = ‘ — первый и второй столбцы матрицы
^21И22Ц
D'. Общая для формул (157), (158) матрица eT(?l-C') опре-
деляется выражением (7.53), где характеристический полином
Л(г)-dct(zl-C)-z2 -~(сц + c22)z + спс22 - c12c2i. (159)
Формулы (157), (158) преобразуем к виду
Явх (z) = fe1 +Л2)(?--говх). (160)
4Z)
Н (•?} — ^22 ^0Д7Нд) м/п
жи)-- 42) - (161)
где нули передаточных функций
ZObx = С11 " С21 J1 Л '> ^0Л7нд = С11 “ С21 (162)
Й21 + П2 аТ2
С целью получения соотношений, более удобных для рас-
четов на ЭВМ, от уравнения (152) с физическими координата-
ми вектора состояния перейдем к уравнению с относительными
координатами xj(h), х2(и):
Дх(и + 1) = СДх(л) + DAv(n) + hAv1 (и), (163)
446
где Дх(п)=||Ах1(л),Дх2(п)Г; Av(«) = ЦДг^л),Лт2(л)||т;
Воспользуемся преобразованием (1.31):
Ах(и) = П0Ахф(лТ); Av(n) = П^Уф^Т),
где матрицы По, Пг даются формулами (1.32). Тогда, умно-
жая уравнение (152) слева на матрицу По, с учетом равенства
(1.30) получаем:
Ах(л + 1) = ПоС'П^Дх^) + ПрП'П^Ду^) + ПоЬ'ббЛт^л),
где согласно равенству (1.30) имеем Av^n) = Дивх(иТ)/17б .
Сравнивая полученное равенство с уравнением (163), прихо-
дим к соотношениям
С = n0CTV; D = n0D'nj’; h = J76noh', (164)
аналогичным (31). Отсюда с учетом (1.32) получим:
С11 - С11 j CI2 = ^6C12 5 С21 = С21 ; с22 ~ с22 >
^11 “ ’ ^12 ~ ^12 > ^21 = ^22 “ ЦТ"> (165)
Лф Лф Л6
h - h’ h —
«1 - JZ > Л2 - ТТ—
Лф Лф
Используя соотношения (165), убеждаемся в том, что
при выполненном преобразовании координат коэффициенты
характеристического полинома (159) и нули передаточных
функций (162) не изменяются:
A(z) = z2 - (сц + c22)z + сцс22 - с12с21;
<1+^ _ r (Т66)
ZQBX - Сц - С21 ^омн.д - Сц С21 .
447
Передаточные функции по относительным значениям
возмущений получаются из (160), (161) при замене
г/21, d'21, h-2 на rf21, J22, Л2- Формулы (155) с учетом равенств
(1.42), (1.43) преобразуются к виду:
g! g?
*41 ~й11(^п) —й110п ~^Оусг) Г j й12 ~й12(Гп) — й11(^п ~^Оусг) ’
ае ае
S1 Я?
С21 ~ Й21 (тп) ~ c2l(Tn “ ^Оусг) ~Г '> с22 = й2г(тп) ~Й21 (тп “т0усг) ~
ае ае
я! л?
41 -41(тп)*й11(Гп — ^Оуа) 11 42 =^2^n) —й11(^п ~ тОусг) ~7" >
«е ае (167)
„3 „2
41 ~^,21Ссп)~й21(^п ~тОусг) г ’ 412 =^22(тп)“ й21(Гп — ^Оусг) Т >
ае ас
— ^11(тп —тОусг)~ ~тОусг)>
ае
^2 = ^21(^п ~T0ycr)~ ^21(гп —тОусг)>
ае
где
Si ~ g^l/^6 ~ Pllall(zn ~~ т0усг)й11(тп) + Р22а21(тп ~ т0усг)й21(тп) '>
Si = Styl/=Р11°11('сп ~'г0усг)й12(тп) + /’22а21('гп -т0усг)й22(тп)>
S2 ~&ф2/(^5^ф)~.Р11й11(гп — т0усг)^’11(^п)“*"/>22й21(тп — ^0усг)^21(^п)’
S2 -Scfil^ =А1й11(тп ~т0усгА2(тп) + /’22й21(тп-т0усг)^22(тп)’
Ре —Рфе/(^5^ф)— А1й11(тп — ^0усг)^11(тп ~тОусг)+ (168)
+ Р22^21^Ух\ ~ ^Оусг)^21(тп ^Оусг)’
®е ~ Р\ 1й11(тп ~ ^Оусг) Р22й21(^п ~ ^Оусг) >
Р\\ ~ РпМб ’ Р22 ~ Р22
Полученные формулы (159) - (163) позволяют проводить
расчет оптимальных переходных процессов в импульсном пре-
образователе при малых возмущениях и анализ их устойчивости
при заданных параметрах силовой части и коэффициентах р1Ь
448
Р22- Построив зависимости границ области устойчивости от рц
и Р22, можно выбрать коэффициенты рп, р22 из условия
обеспечения устойчивости. Рассчитав частотные передаточные
функции, можно построить зависимости показателя колеба-
тельности М от коэффициентов р^, Р22 и но ним определить
значения Р22> соответствующие заданному показателю М.
Определение параметров устройства управления
В качестве начального приближения будем искать такие
параметры системы управления, для которых в окрестности
установившегося режима справедливо равенство (150) [60].
Рассмотрим систему управления с обратными связями
по току дросселя фильтра и выходному напряжению ППН.
Уравнение (4.32) для определения момента сравнения
пилообразного напряжения wn(Z) с управляющим ny(Z) запи-
шем в виде
^п(^1и) = ~ СфХф(^и) ’
где Сф =||Х'1АДТ, А'дА'^гЦ; значение вектора состояния Хф(^]„)
определяется по формуле (1.14). Линеаризуя это уравнение в
окрестности установившегося режима работы ППН, получаем:
^ф.уст’
? “ ^1уст
(пТ) ДГ1„ =
“ ~ СфФ(^уст)ДХф(«Т') Сф®ф(^1уст)^¥ф(и^) ’
где 5М = 1/«п (бусГ) — крутизна модуляционной характери-
стики ШИМ. С учетом равенств (141) и
^ = Ан.фФ(г) = Ф(0Ан.ф
449
будем иметь
Л'1я - —------------—-------------------------------—. ( 10>)
е Сф (^]уст)[Ан фХф уст(лТ) + Вн.ф^ф.уст(иТ)]
1’м
Приравнивая правые части формул (150) и (169), при
Д£/оп=0 приходим к уравнениям:
СФ = {«фе 1 - [ан.фхф ует(л7>Вн фуф уст(«7')]ёф1}’1Ф * &уст);
Сф = —\-—-{«феВф(11уст)- Ф(^1уст)[Ан.фХфуст(лТ) +
ам U'U)
+ ®н.ф^ф.уст («nfe2 - ₽феет)Г-
Первая формула (170) позволяет найти параметры сис-
темы управления, обеспечивающие оптимальные процессы
при малых начальных отклонениях ДХф(п7), вторая — при
малых отклонениях возмущений.
4S0
10. ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ
В ИМПУЛЬСНЫХ ПРЕОБРАЗОВАТЕЛЯХ
10.1. Состояние проблемы
Предварительные замечания
Как было отмечено, импульсные преобразователи пред-
ставляют собой особый класс нелинейных дискретных сис-
тем (НДС), который в общей теории НДС практически не
рассматривался. Широкое практическое применение им-
пульсных преобразователей в силовой электронике привело
к тому, что изучением нелинейных явлений в ППН занялись
специалисты, принимавшие участие в разработках источни-
ков вторичного электропитания.
Автор еще в начале 80-х годов обратил внимание на суще-"'
ственные отличия импульсных ППН от широко исследованных
в общей теории релейных систем, провел исследование им-
пульсного преобразователя методом отображений [61] и затем
неоднократно возвращался к этой проблеме [18,51,52,62]. Ис-
пользование в качестве нагрузки импульсн го преобразователя
однозвенного, а иногда и многозвенного £С-фильтра повышает
порядок дифференциальных уравнений непрерывной части и
существенно усложняет исследование динамики.
В настоящее время решение указанной проблемы благо-
даря разработке эффективных программ анализа на ЭВМ,
заметно продвинулось вперед.
Некоторые авторы ограничивались рассмотрением им-
пульсного преобразователя с непрерывной частью первого
порядка [35]. В ряде работ исследовались хаотические режи-
мы импульсных преобразователей [63 - 65].
Нелинейные явления в импульсных преобразователях про-
являются при нарушении устойчивости стационарного режима,
а также в переходных процессах, вызванных большими возму-
щениями. При настройке и эксплуатации импульсных преобра-
зователей возможны как небольшие, так и значительные изме-
нения параметров, приводящие к нарушению устойчивости
451
и изменению характера колебаний. Выбор рабочей точки на
значительном удалении от границы устойчивости в про-
странстве параметров неэкономичен и приводит, как прави-
ло, к ухудшению точности стабилизации. Необходимость
изучения режимов работы, появляющихся при нарушении
устойчивости нормального режима, объясняется также тем,
что из практических соображений нецелесообразно и часто
невозможно создавать ППН, в которых обеспечивалась бы
устойчивость во всех возможных ситуациях.
Нарушение устойчивости импульсного преобразователя
можно допустить, если это не опасно, при возникновении
некоторых неисправностей в процессе эксплуатации, а также
в вспомогательных, редко встречающихся режимах работы,
например при пуске ППН, рассчитанного на длительный
режим работы. При пуске параметры меняются в широких
пределах и трудно обеспечить устойчивость. Естественно,
нарушение устойчивости не должно приводить к необрати-
мому выходу из строя элементов ППН.
При проектировании необходимо оценить перегрузки
элементов, возникающие в результате нарушения устойчиво-
сти ППН. Хорошее знание особых режимов, появляющихся
при нарушении устойчивости, позволяет более обоснованно
выбирать параметры схемы.
Рассматриваемая здесь задача является наиболее слож-
ной и малоизученной частью проблемы качественного ис-
следования импульсных преобразователей. Она сводится к
выявлению всех неподвижных точек отображения последо-
вания ППН, условий изменения их числа, характера, устой-
чивости, исчезновения, определению их областей притяже-
ния и т.д. В первую очередь необходимо определять частоту
и амплитуду колебаний, возникающих при нарушении ус-
тойчивости нормального режима, вид их возбуждения (мяг-
кий или жесткий), оценить, насколько опасно нарушение ус-
тойчивости. Предварительное качественное исследование
452
может существенно облегчить и численное решение систе-
мы, так как позволяет сознательно, а не вслепую разобраться,
вычисление каких именно процессов представляет интерес.
Методы определения критических значений параметров,
при которых возникает неустойчивость, рассмотрены в пре-
дыдущих главах. Однако они не дают ответа на вопрос о том,
что происходит в импульсном преобразователе при возник-
новении неустойчивости, опасны или безопасны возникаю-
щие при этом колебания. В связи с этим не существует дос-
таточно обоснованных методик выбора запасов устойчиво-
сти: эти запасы могут оказаться завышенными, если при на-
рушении устойчивости происходит мягкое возбуждение ко
лебаний, а их амплитуда медленно растет с изменением пара-
метра, и наоборот, — заниженными при жестком возбуждении
колебаний, когда амплитуда колебаний быстро возрастает
при малом изменении параметра.
Дополнительную информацию о процессах на границе
устойчивости дают годографы собственных значений матри-
цы Якоби отображения последования. Если вблизи границы
устойчивости ППН имеется отрицательное собственное зна-
чение матрицы Якоби, то мягко возбуждаются колебания уд-
военного периода. Этот случай имеет место в понижающем
ППН, когда запаздывание модулируемого фронта импульса
незначительно, или когда влияние запаздывания скомпенси-
ровано введением отрицательной обратной связи по току
дросселя фильтра. В понижающем преобразователе с запаз-
дыванием, а также в повышающем и инвертирующем преобра-
зователях нарушение устойчивости происходит за счет выхода
пары комплексно-сопряженных собственных значений из еди-
ничного круга, и возможны более сложные типы бифуркаций.
Реализация методов качественного исследования совре-
менных импульсных ППН требует выполнения большого
объема вычислений. По этой причине до недавнего времени
качественным методам исследования импульсных ППН не
453
уделялось должного внимания. Вместе с тем, при условии
проведения предварительной подготовительной работы, за-
ключающейся в выполнении ряда аналитических преобразо-
ваний исходной математической модели, возможно много-
кратное снижение требуемого при качественном исследова-
нии объема вычислений.
Определение простых неподвижных точек
отображения последования
Простая неподвижная точка отображения последования
(нормальный установившийся режим) в режиме непрерыв-
ного тока рассчитывается по формуле
х = [1-А(тп)]-,[В(тп)у-В(тп -t0)(v-vb)J, (1)
получающейся из уравнения (8.75) при х = х. Время отчи-
тывается от момента включения транзистора. Здесь
Л/ М”1 _ 1 Р~й22(тп) °12(тп)
= det[l - А(тп)]| fl21(Tn) (2)
det[l - А(тп)] = 1 - оц(тп) - о22(тп) + det А(тп).
На основании формулы (7.43) имеем йеГА(тп)=е-2^Тп, поэтому
det[l- А(тп)] = 1 + - ои(тп)- о22(тп). (3)
Из (1) с учетом (2) получаем:
Xl = dZt[l-XO^i^'222(Tn)Kfei(Tri)-iii(-cn-To)h’i+/’i2('Cn)v2]+
+ «12^п)[(*21(^п) - *21(Tn - *o))h + MTn)v2] };
Х2 = detp _ Jj{c21^n)[(*ll(^n) ~ ~ + *12Gn)v2] +
+ [1 -«11(тп)][(*21(тП)-*21(Tn ~*o))vl +*22(Tn)v2]}-
Расчеты по формулам (1) и (4) возможны после предва-
рительного определения времени т0, связанного с промежут-
ком Т1=то+тз1— тз2- Он рассчитывается из уравнения (8.71),
454
в которое вместо х нужно подставить выражение (1). Прак-
тически решение уравнения (8.71) сводится к многократным
вычислениям и проверке равенства нулю левой части. Для
этого, задаваясь значениями то Б пределах от 0 до
Tmax= YmaxTn> вычисляют координаты хь х2 по формулам (4) и
подставляют в решаемое уравнение.
Аналогично рассчитываются координаты простых непод-
вижных точек для других схем импульсных преобразователей.
Расчет неподвижных точек отображения последования
при помощи изокривых
Попытки определения неустойчивой неподвижной точки
отображения х = f (х) непосредственным решением урав-
нения Xjy = f (хл) могут приводить к неустойчивым вычис-
лительным процессам. Для повышения эффективности ис-
следования отображения плоскости в плоскость предложен
метод, основанный на численном построении изокривых
отображения и нахождении точек их пересечения [67]. Метод
применен к импульсным преобразователям в работах [51,52].
Изокривые отображения (8.59) описываются уравнениями
Ф1(*1>*2) = 0, Ф2(х1>*2)= °, (5)
соответствующими его представлению в виде
*1 = Xi +<Pi(xi,X2), Х2 = Х2 + ф2(Х1,Х2). (6)
Неподвижные точки отображения совпадают с точками
пересечений изокривых.
Изокривые строятся следующим образом. При фиксиро-
ванном значении одной из координат (в нашем случае это х2)
другая координата jq меняется шагом hi, при каждом новом
значении x^h] происходит обращение к процедуре, реали-
зующей вычисление значений хь х2, и проверке знаков раз-
ностей X] -X] и х2 -х2. Если при очередном значении x^/zi
знак разности х,-х, или х2-х2 отличается от предыдуще-
го, то это значит, что координата точки изокривой
Ф1(х1,х2) = 0 или соответственно ФгОй^г)= 0 находится в
455
интервале (x^Xj+Aj). После этого координата xj точки изо-
кривой уточняется методом Ньютона:
^jn+l —
где ^-Ф1(х1,х2)=[ф1(х1п+й1,х2)-ф1(х1„-й1,х2)]/2Л1; xi„ -
одна из границ указанного интервала. Шаг Aj для нахожде-
ния производной должен быть достаточно мал. Таким обра-
зом определяются все точки изокривых при фиксированном
значении х2. Аналогично рассчитываются координаты точек
изокривых при новом фиксированном х2.
На рис. 10.1 представлены изокривые отображения (8.59)
для понижающего ППН при Со=Ю; ^=^6=0,2; JLC/Т=2,5;
Аот=2; u=0,7; vj=l; У2=О;
Утах=0Л Средний участок
изокривых ф2(х1,х2) = 0 соот-
ветствует режиму работы, при
котором не происходит огра-
ничение длительности вклю-
ченного состояния транзисто-
ра у. Левый и правый восхо-
дящие участки этих кривых
отличаются тем, что происхо-
дит ограничение у на уровне
соответственно утах и Утт=0, когда система управления раз-
мыкается и не зависит от коэффициента усиления Kq.
Аналогично отображению (8.59) определяется отображение
x=g(x)=f[f(x)], (7)
которое ставит в соответствие любой точке х плоскости Х|, х2
в начале периода точку х той же плоскости с координатами
xi,X2, получаемыми через два периода 2тп, и называется
квадратом отображения х = f (х). Простые неподвижные
точки отображения g(x) являются двукратными неподвиж-
ными точками отображения f(x).
456
Колебаниям на частоте f/M соответствуют неподвижные
точки Л/-Й степени отображения f(x).
На рис. 10.2 изображена траектория изображающей точки
в расширенном пространстве состояний ППН при колеба-
ниях удвоенного пе-
риода (на частоте f/T).
На плоскости хь х2,
являющейся секущей
для траектории, пока-
заны инвариантные
кривые отображения
x=f(x), которые при
отображении перехо-
дят в себя, и непод-
вижные точки Nq, N\,
N2 отображения [48].
Тип неподвижной точ-
ки определяется числом корней характеристического уравне-
ния, лежащих внутри и вне единичного круга. Из трех непод-
вижных точек одна точка Nq неустойчивая (седловая), а две
другие точки Ny N2 образуют устойчивый цикл двукратных
неподвижных точек. Это значит, что если в начале одного из
периодов достигается точка Л^, то в конце этого периода —
точка TV2, а в конце второго периода — снова N и т.д. Точка N\
отображением f(x) переводится в точку Nh а точка TV2 — в М-
Изокривые отображения g(x) описываются уравнениями
Ч/](х1,х2) = 0; 1|/2(^ьХ2) = 0,
(8)
соответствующими его представлению в виде
*1 = *1 +Ч'1(*1Л2)= °; *2 = *2 + V2(xl,x2) = °- (9)
Расчет этих изокривых проводится по алгоритму, отличаю-
щемуся от описанного ранее только тем, что при фиксиро-
ванном значении х2 и изменении xi с шагом h\ происходит
457
обращение к процедуре, реализующей вычисление значений
Х],х2. На рис. 10.3 представлены изокривые отображения
x=g(x) для Qo=10;
5=96=0,2; Ato=0;
«=0,7; vj=l; v2=0;
х13=8; VZC/7 = 2,5;
Ymax=0>8- Средний
участок изокривой
Vi(xi,x2)=0 соот-
ветствует режиму,
при котором на
любом периоде не
происходит ограни-
чение длительности
включенного со-
стояния транзисто-
ра. Левый и правый
участки этой изо-
кривой отличаются тем, что на одном из двух периодов время
т0 ограничивается на уровне YmuJn- Неподвижная точка No
соответствует колебаниям
на частоте f (нормальный
режим). Когда изокривые
Vi(x],x2) и v2(x,,x2) пе-
ресекаются только в одной
точке No, последняя устой-
чива. Когда пересечение
происходит в трех точках,
неподвижная точка Nq ста-
новится неустойчивой.
Изокривые на рис. 10.4
отличаются от кривых
на рис. 10.3 тем, что
458
коэффициент усиления Aq=40, но изменяется коэффициент Аф.
Как видно, с ростом система удаляется от границы устой-
чивости неподвижной точки Aft. Следовательно, значение К^,
выбираемое из соображений улучшения динамических свойств
ППН, не должно быть слитком большим. При уменьшении
коэффициента Аф наступает такой режим, в котором изо
кривые пересекаются только в одной точке Nq, которая ста-
новится устойчивой, а цикл двукратных неподвижных точек
Nx, N2, соответствующий колебаниям на частоте f/2, исчезает.
Аналогично строя изокривые более высоких степеней ото-
бражения f(x), можно исследовать колебания на частотах f/M.
Изучение бифуркаций неподвижных точек
отображения последования при помощи изокривых
Для уточнения координат неподвижных точек отображе-
ния, найденных как точки
пересечения изокривых,
служит процедура, реали-
зующая метод Ньютона-
Рафсона решения системы
нелинейных уравнений (5)
или (8). Практически для
получения координат с точ-
ностью 10'12 требовалось
всего три-четыре итерации.
Расчетные бифуркацион-
ные диаграммы для указанных
выше параметров и экспери-
ментальные точки (х х) пред-
ставлены на рис.10.5 и 10.6.
При и Аф<АфКр
имеется только одна непод-
вижная точка Nq, из которой
при Kq-Kq кр и Аф-—Aoq- jjp
рождаются две двукратные
*1
0,5
0,4
0,3
3
*2
0,687
0,685
0,683
0,681
35 40 45 50 Ко
Рис. 10.5
X X / X
* — X ~Т" Х1Л>
- X
“1
» X X
40 А).кр 45 50 Kq
x2Nt
✓ J
/ ✓ 1
Х2М
неподвижные точки jVj, N2, а
459
точка 2V0 становится неустойчивой (зависимости координат
*1дго, Л2М) неустойчи-
вой точки 7V0 показа-
ны штриховыми ли-
нями). Как видно,
координаты точек
М, TV2 при Ао>КЬ.кр и
Ао^Лот кр изменяются
плавно, при к^Аокр,
^От=^Огкр ТОЧКИ <
Л^2 сливаются с No.
Следовательно, проис-
ходит мягкое возбуж-
дение колебаний удво-
енного периода и граница устойчивости точки Nq безопасная.
Колебания удвоенного периода (на основной субгармонике)
могут иметь различный характер: регулирующий транзистор
может открываться или на каждом периоде (рис. 10.7,а), или через
период (рис. 10.7,6); длительность включенного состояния тран-
зистора то=т1 либо не ограничивается, либо через период про-
исходит ограничение т0 на уровне утахтп (рис.10.7,а); ток дрос-
селя фильтра либо не прерывается, либо прерывается на каждом
периоде, либо — через период. Изложенная методика в сочета-
нии с описанным в § 8.3 алгоритмом расчета значений отобра-
жения последования позволяет выявить все возможные режимы.
460
Колебания удвоенного периода в наибольшей степени
сказываются на кривой тока хДт) и длительности импульсов
т0. Подставляя в формулу (8.73) координаты неподвижных
точек (xuvpXjjyJ, (хьу>, х2Лг) вместо хь х2 и соответственно
T=YmaxTn, T = To,v2' можио найти максимальные значения
тока при таких колебаниях и оценить перегрузку по току,
связанную с нарушением устойчивости.
10.2. Сведения из теории бифуркаций
Слово бифуркация означает раздвоение и употребляется для
обозначения качественной топологической перестройки картины
при изменении параметров, от которых зависит объект. Объек-
ты могут быть разные: вещественные или комплексные кривые
и поверхности, функции и отображения, многообразия и рас-
слоения, дифференциальные или интегральные уравнения [68].
Если объект зависит от параметров, то говорят, что задано
семейство. Если семейством интересуются локально, при ма-
лом изменении параметров в окрестности фиксированных зна-
чений, то говорят о деформации объекта, соответствующего
этим значениям параметров. Далее мы в основном будем рас-
сматривать однопараметрические семейства отображении.
Пусть Mn N— гладкие.многообразия, например некоторые по-
верхности. Гладкой (кусочно-гладкой, непрерывной) гомотопи-
ей (или деформацией) отображения f называется гладкое (ку-
сочно-гладкое, непрерывное) отображение цилиндра
V:N*I-+M, / = [0,1],
такое, что F(x,0) = f(x) при любых х е N. Говорят, что ото-
бражения где fp = F(x, ц), ре/, гомотопны исходно-
му f = fj) (здесь ц — параметр) и принадлежат одному классу
(или семейству) попарно гомотопных отображений.
Теория бифуркаций связана с теорией особенностей и тео-
рией катастроф. Особенности, бифуркации и катастрофы —
термины, описывающие возникновение дискретных структур из
461
гладких [68]. Катастрофами называются скачкообразные из-
менения, возникающие в ответ на плавное изменение внеш-
них условий.
Рассмотрим методы, позволяющие исследовать поведе-
ние стационарных решений (состояний равновесия) систем
дифференциальных уравнений в зависимости от одного па-
раметра ц. Эта задача сводится к исследованию множества
решений следующей системы уравнений:
/1(х1,х2,...,х„,ц) = О,
/2(х],х2,...,х„,р.) = О,
/„(Х1,х2,...,х„,ц)= О,
где функции (х,,х2,... х„, ц), i = 1,2,..., п, достаточно гладкие;
xi,x2,...,x„ — неизвестные. Систему (10) можно записать в виде
f(x, р) = 0, (11)
где х eR", ц eR1.
Множество всех решений системы (11)
5(f) - |(х, р.) е R" х R1,/(х, ц) = 0 j. (12)
Оно обычно представляет собой объединение нескольких кри-
Рис.10.8
вых в Rn+1, хотя может вклю-
чат в себя и отдельные изо-
лированные точки (рис.10.8).
При п>1 множество 5(f)
удобно изображать на дву-
мерной плоскости, проекти-
руя его на выбранную плос-
кость х„ ц. Такое двумерное
изображение множества 5(f) называется диаграммой стацио-
нарных решений, или бифуркационной диаграммой. При про-
ектировании может оказаться, что на двумерной картинке
имеет место пересечение кривых, хотя на самом деле в R'i+1
эти кривые не пересекаются. Компоненту множества 5(f),
462
представляющую собой замкнутую кривую, не имеющую са-
мопересечений, называют июлей.
Обозначим производную отображения f(x, ц) по вектору х в
точке (хо,ро) через f':
8/ 8А ё/\
ЙХ] дх2 ёхп
8А &L ё/2
дх{ дх2 " ёхп
ё/п '
ЙХ] йх2 " ёхп
а производную отображения f(x, ц) по вектору (х, ц) — через J:
J = ёА дх} 8/2 дх} 8А дхп ё/2 дхп £4 йц 8/2 Й|1 (13)
8fn ё/п
ЙХ[ " ёх„ ф
Рассмотрим три случая.
1. Точку (х0,цо), через которую проходит только одна
ветвь решений системы (10), и где выполнено условие
detfx*0, (И)
называют регулярной (простой) точкой. В этом случае к системе
(10) можно применить теорему о неявном отображении, со-
гласно которой для всех значений параметра р, взятых в неко-
торой окрестности (7(ро), существует однозначная зависимость:
X = Х(р),
причем
f(x(p),p) = 0
для всех р е£7(р0).
463
В одномерном случае (и=1) в регулярной точке выпол-
нено условие
зг"(х(ь11о) * 0.
Эр
Такой на рис.10.8 является, например, точка Л
2. Если в точке (хо,ро) det f* = 0, ранг расширенной
матрицы J равен п (rang J=n), а производная dp/dx, меняет
знак, то такую точку называют точкой поворота.
Такой на рис. 10.8 является точка В, в которой в одномер-
ном случае
^(хо,цо) = О; |£(х0,Мо)*О, (15)
их ср
а производная dp/dx меняет знак, т.е.
—^’С’ЧпМо) * 0.
ах2
Поскольку выполняется второе условие (15), то, поменяв х
и р местами, в окрестности точки (хо.ро) можно построить зави-
симость ц=ц(х), ц0=ц(х0). По теореме о неявной функции
р(хо)=“
При переходе ц через значение ро происходит бифурка-
ция: появляется или исчезает пара решений. Например, при
переходе р значения щ слева направо (рис. 10.8) появляется
пара решений, а при переходе значения щ справа налево ис-
чезает пара решений. Значение ро называется бифуркацион-
ным значением параметра.
3. Если в точке (хо,ро) рант матрицы J(xo,po) меньше и,
то точку (хо,цо) называют сингулярной точкой множества 5(f).
В одномерном случае в сингулярной точке множества S(f)
т~(хо>Ро) = т^(хо»Мо) = 0- (16)
ох оу.
Точки поворота и сингулярные точки называются критиче-
скими точками множества 5(f).
?-(*о>Ро) |^(*о,Ро)-
8х
dp
464
Рассмотрим подробнее ветвление в точках бифуркации в
одномерном случае, т.е. будем исследовать уравнение
/(х,ц)= 0, х е R1.
Пусть (х0,цо) “ сингулярная точка множества S(f), т.е.
выполняются равенства /(хо,цо) = О и (16). Предположим
также, что, по крайней мере, одна частная производная вто-
рого порядка
А = |4-(*о,Ро)> в = —-fabPob с = (*о,Ро)
Зх2 дхдц дц2
отлична от нуля. Учитывая, чтоДхо,цо) = 0, а также равенст-
во (16), получаем:
/(х,р) = |[^(х-х0)2 + 25(х-х0)(ц-ц0) + С(ц-ц0)2] +
+ р[(х-х0)2+(р-ро)2] = О. (17)
Разделив соотношение (17) на (ц-ц0)2 и перейдя к пределу
при (х,ц) -» (хо,цо), получим уравнение:
/if^l +25^ + С = 0. (18)
J ац
Аналогично, деля равенство (17) на (х-х0)2 и переходя
к переделу при (х,ц) -> (хо,цо), находим:
А + 2В + С(=0. (19)
dx \dxj
Здесь dx/d\x — угловой коэффициент касательной к дуге,
проходящей через точку (х0,ц0) при рассмотрении х как
функции ц, или d\t/dx — угловой коэффициент касательной,
если мы считаем ц функцией х.
Возможны два случая.
1. Если А * 0, то решение уравнения (18) имеет вид
f dx^ _ - В±^В2 - АС ро)
k/pji.2 А
465
При D = B2 - AC<0 уравнение (18) не имеет вещественных
решений и точка (хо,Ро) является изолированной точкой мно-
жества S(f), из нее не выходит ни одна кривая. При D>0
уравнение (18) имеет два вещественных решения; это означает,
что в окрестности точки (хо,ро) множество S(f) состоит из
двух пересекающихся дуг, или, иначе говоря, в точке (хо,цо)
сходятся четыре ветви стационарных решений (рис. 10.9,а).
2. Если А = 0, С * 0, то уравнение (19) имеет два решения
р?р] = 0 —
(Jxji ’ vdxji С '
В этом случае множество S(f) в окрестности точки (xq,Po)
также состоит из двух пересекающихся дуг. Одна имеет в
этой точке вертикальную касательную, т.е. (%о,Ро) является
точкой поворота для этой ветви (рис.10.9,0. Такой случай
соответствует бифуркации типа «вилка».
Устойчивость стационарного решения дифференциаль-
ного уравнения
^ = f(x,p), х = ||х1,х2,...,х„||т (21)
характеризуется собственными значениями матрицы Якоби
f*. При изменении параметра ц устойчивость может изме-
няться лишь в тех точках на ветви стационарных решений,
где собственное значение переходит из левой комплексной
полуплоскости в правую.
Точки диаграммы стационарных решений уравнения (11), в
которых пара комплексно-сопряженных собственных значений
пересекает мнимую ось, называются точками бифуркации Хопфа.
466
В этих точках (при выполнении определенных условий) от ветви
стационарных решений отходит ветвь периодических решений.
Устойчивость стационарного решения нелинейного раз-
ностного уравнения
Xjt+1=f(x*,p), * = 0,U... (22)
также характеризуется собственными значениями матрицы
Якоби fX(t правой части. Уравнение стационарных состоя-
ний в этом случае есть
Х = f(x), (23)
где х — X*+i — Х*> и также сводится к системе (10). Записав
уравнение (23) в виде
g(X) = 0, (24)
где g(x) = f(X) - Х, найдем, что матрицы Якоби отображений
g(x) и f(X) связаны простым соотношением:
g'x = Гх - 1
Элементы главной диагонали матрицы gx на единицу
меньше, чем соответствующие элементы матрицы fx, а их
остальные элементы одинаковы. Поэтому характеристиче-
ский многочлен матрицы gx
det(gx -Xl) = /12 /21 /22~1-^ • • fin fin
/л1 fn2 f'nn-^
получается из характеристического многочлена матрицы fx
det(fx -zl) =
/11 /12 -• /1л
/11 /22 ~Z fin
fnl fп2 fnn
заменой z = X.+1.
467
Теорема о центральном многообразии [71,72]
Пусть f(x) — отображение, определенное в окрестности
нуля в полном нормированном линейном пространстве (ба-
наховом пространстве) Л, принадлежащее классу С'4’1, r> 1,
f(0) = 0. Предположим также, что производная f'(0) имеет
спектральный радиус 1 и ее спектр расщепляется на две час-
ти: часть, лежащую на единичной окружности, и остаток,
который находится на ненулевом расстоянии от единичной
окружности (это требование автоматически выполняется, ес-
ли пространство X конечномерно или, в более общем случае,
если оператор f*(0) компактен). Обозначим через V обоб-
щенное собственное подпространство оператора f*(0) (кото-
рое в конечномерном случае совпадает с собственным под-
пространством), порожденное частью спектра, лежащей на
единичной окружности; предположим, что подпространство
V имеет размерность d < со.
Тогда существует окрестность нуля W с X и подмного-
образие М a W класса С и размерности d, проходящее через
0 и касающееся подпространства V в точке 0, для которого
выполнены следующие условия:
а) локальная инвариантность-, если х G Л/ и значение
f(x) е W, то f(x) еЛ7;
б) локальная устойчивость', если k-я. степень отображе-
ния ffc(x) еЖ, для всех Л=1,2,..., то при А;->оо расстояние
между f *(х) и М стремится к нулю.
Локальная инвариантность означает, что траектория сис-
темы с начальной точкой на многообразии М остается на М
(по крайней мере, на малом интервале времени). Локальная
устойчивость означает, что существует некоторая окрест-
ность начала координат, обладающая тем свойством, что лю-
бая траектория, которая не покидает эту окрестность при
t -> оо, стремится к многообразию М.
468
Напомним, что спектральным радиусом оператора f*(0)
называется максимальный из модулей его собственных зна-
чений. Собственным подпространством линейного операто-
ра f'(0), соответствующим собственному значению К, назы-
вается множество всех собственных векторов, соответствующих
этому значению, к которому присоединен нулевой вектор [46].
Основная ценность теоремы о центральном многообра-
зии заключается в том, что, используя ее, можно свести бес-
конечномерную задачу к конечномерной, а в случае конеч-
номерной исходной задачи — свести исследование к задаче
меньшей размерности.
Сформулированная теорема о центральном многообразии
применима к отображениям, обыкновенным дифференциальным
уравнениям и уравнениям в частных производных. Ее рекомен-
дуется применять к так называемой «надстроенной» системе, в
случае системы дифференциальных уравнений имеющей вид
* = Ф.Д. (25)
|1»о,
получаемой добавлением уравнения ц = 0, превращающего
параметр ц в переменную. Теорема может быть применена и
непосредственно к исходной системе, но только при ц = 0.
Примененная к надстроенной системе теорема дает больше,
поскольку, в силу этой теоремы, многообразие М содержит
все неблуждающие точки исходной системы в окрестности
точки х = 0 не только при ц = 0, но и при всех ц из некото-
рого интервала, содержащего нуль [72].
Перед применением теоремы о центральном многообразии
сначала правая часть системы представляется рядом Тейлора:
х = f'(0,0)х+ф(х,ц),
Й = 0,
а затем преобразуется к канонической форме.
469
При исследовании системы, описываемой отображением
х - f (х, ц), надстроенная система
x = fx(0,0)x+<p(x,ji), (27)
И = й
представляет собой отображение f:R" х R > R" х R. Его про-
изводная в нуле есть
(28)
I 0 1|
а спектр представляет собой объединение спектра отображе-
ния fx(0,0) и значения 1. Мы можем применить к отображе-
нию f теорему о центральном
многообразии и получить инвари-
антное многообразие (рис. 10.10) в
пространстве R”xR. Оно той же
размерности, что и собственное
подпространство, соответствующее
части спектра, пересекающей еди-
ничную окружность при ц = 0.
Подмногообразия этого инвариантного многообразия, соответ-
ствующие ц = const, образуют однопараметрическое семейст-
во инвариантных многообразий для отображения f(x, ц).
10.3. Уменьшение размерности бифуркационной задачи
сведением на центральное многообразие
Рассмотрим сравнительно сложный случай, когда матрица
Якоби отображения f(x,p) имеет пару комплексно-сопряженных
собственных значений X=a(p)+jco(p) и X* =а(ц)-/<о(ц).
Для приведения линейной части системы (27) к канони-
ческой форме, необходимой для применения теоремы о цен-
тральном многообразии, воспользуемся методом проекций
[66]. Используем замену переменных
х = zq + z*q* + w = 2Re(zq) + w, (29)
470
где q и q* — собственные векторы матрицы f'(0,0), соответст-
вующие собственным значениям Х=а(0)+у<о(О) и X*; z и z* —
комплексные коэффициенты;
w = (1 — Р)х (30)
— проекция вектора х на подпространство, порожденное ос-
тальными (кроме q и q*) собственными векторами матрицы
f*(0,0); Р — матрица проектирования на подпространство,
порожденное собственными векторами q и q*. Здесь знак *
означает комплексное сопряжение.
Напомним, что подпространство, порожденное определен-
ной системой векторов, иначе называется подпространством,
натянутым на эту систему векторов, или линейной оболоч-
кой этих векторов [10,46].
Согласно методу проекций матрица проектирования Р сле-
дующим образом выражается через множество правых и левых
собственных векторов матрицы f^(0,0), соответствующих ком-
плексному собственному значению X и составляющих квазиби-
ортогональную систему векторов q,q‘ и q',q'* [10,70]:
р=q(ч')т+q *(q'*)T=q(q')T+[q (q')T]*= 2Re[q(q')T]> <31)
где q' — собственный вектор транспонированной матрицы
[f'(0,0)]T, соответствующий собственному значению X, т.е.
так называемый левый собственный вектор матрицы fx(0,0) ,
соответствующий X [10].
Введем координаты и являющиеся действительной
и мнимой частями коэффициента z, т.е. положим, что
z = yi + jyi- Тогда равенство (29) преобразуется к виду
х = By = 2(yi Req - у2 Imq )+ w, (32)
откуда видно, что первый столбец матрицы перехода к новым
координатам В есть Ь] =2Req, второй столбец — b2 =-2Imq.
Остальные столбцы матрицы перехода
В = ||Ь1 ь2 ь3 — ь„|| (33)
471
представляют собой произвольный набор из п-2 веществен-
ных линейно независимых векторов b,, 3<i<,n, удовлетво-
ряющих условиям ортогональности
(Ч'Л) = (<Г)ТЬ{ =0. (34)
Действительно, из равенств (32), (33) с учетом (30) получим:
w = y3b3+... + у„Ь„ = Ху,Ь, =(1-Р)х. (35)
г=3
Умножая равенство (35) слева на строку (q'*)\ с учетом (31)
получаем:
ЕУ (ч'‘)ТЬ, = (q'*)Tx - (q'*)Tq (q')Tx - (q'*)1 q*(q'*)T.
i=3
Учтем, что в связи с квазибиортогональностью семейств
правых и левых собственных векторов
(q')Tq* = 0, (q'*) q = о, (q')Tq = 1, (q'*)Tq* = 1 (36)
Поэтому имеем тождество
2>(п'*)ть,- = о,
2=3
откуда следует условие (34), эквивалентное равенству
(q')Tbf =0.
В уравнении (27) сделаем подстановку (29):
fq+Z V + w =zfx (0,0) q + z% (0,0)q‘ + fx (0,0) w+<p (zq+z *q*+w, p).
Поскольку q и q*~ правые собственные векторы мат-
рицы fx(0,0), соответствующие собственным значениям X и
X*, то справедливы равенства
f'(O,O)q = Xq, fx(O,O)q* = X*q‘,
с учетом которых имеем
fq+ Z*q* + w = zXq+ z‘X*q* + fx(0,0)w +<p(zq + z*q‘ + w,p). (37)
Умножив это равенство слева на вектор (q )T, с учетом
условий (36) получим:
Z + (q7w = Xz + (q')Tfx(0,0)w + (q')T<p(w + 2Rezq,p), (38)
472
где, принимая во внимание выражения (35) и условия (34), имеем:
(q')Tw= I>(q')Tb< = °’
»=3
и поскольку q' — левый собственный вектор матрицы
f*(0,0), соответствующий собственному значению то со-
гласно [10]
(q')Tfx(0,0) = x(qjT.
Следовательно,
(q')Tfx(°,°)w = ^(q')T* = °-
Таким образом, уравнение (38) записывается в виде
Z =Z.z + G(z,z’,w,p), (39)
где
g(z,z*,w,p)= (q')1<p(w + 2Rezq,p).
Вычитая из уравнения (37) равенства
fq = Xzq + G(z,z*,w,p)q, z*q* = X*z*q* + G*(z,z*,w,p)q‘,
вытекающие из (39), получаем еще одно уравнение
w = fx(0,0)w + H(z,z’,w,p), (40)
где
p) = <p(w + 2Rezq,p)- 2Re[G(z,z*, w,p)q].
Система уравнений (39), (40) формально имеет размер-
ность п+2, но условие ортогональности
(q')Tw = 0 (41)
приводит к тому, что две из компонент вектора w являются
линейными комбинациями остальных компонент с незави-
сящими от времени коэффициентами.
Итак л-мерная система (27) сведена к двумерной стан-
дартной форме (39) (второе уравнение получается из (39)
комплексным сопряжением).
Из уравнения (39) и комплексно-сопряженного ему уравнения
в результате заменены переменных z — Уг + /Уг получаем систему
J'i = « (й)У1 - со (ц)у2 + Re G [z, z\w, ц),
У2 = ю(.и)У1 + «(и)Уг + IniG(z,z*,w,p).
473
где при бифуркационном значении параметра (ц=0) собст-
венные значения матрицы Г* Х12 =а(0)±уи(0) находятся на
единичной окружности, а в случае аналогичных преобразо-
ваний системы дифференциальных уравнений — на мнимой
оси (так что а(0)=0).
Определение центрального многообразия
Центральное многообразие М системы (39),(40)
w = b (z, Z*, ц), h (0,0,0) = 0, (43)
представляет собой локально инвариантное и локально ус-
тойчивое трехмерное многообразие в пространстве R"xRJ.
Оно содержит начало координат и интервал -pg < ц < цо оси
ц и касается в начале координат трехмерного пространства,
натянутого на собственные векторы матрицы (28), соответст-
вующие собственным значениям ?.=a(0)+jw(0), А*, 1.
Рассмотрим определение центрального многообразия
системы (40), (42), которую запишем в виде
у = By + Y(y,w,p),
w = Cw + W(y,w,p),
где y,yeR*, w,weRm, m=n-k; В и С — квадратные мат-
рицы размеров к и т; YeR*, WeRm; ряды Тейлора ото-
бражений Y и W не содержат свободных и линейных членов.
Собственные значения матрицы В при ц = 0 находятся на
единичной окружности, при р > 0 выходят из единичного
круга; а у матрицы С располагаются внутри единичного круга.
Тогда ищется центральное (инвариантное) многообразие
w = i (у, й), • (°50) = 0. (45)
В связи с инвариантностью многообразия справедливо
также уравнение
w = i(y,M).
474
Подставляя в него у и w из (44), с учетом (45) получа-
ем функциональное уравнение
i (В у + Y (у, i (у, ц), ц)) = С i (у, ц) + W (у, i (у, ц} р) (46)
для определения i(y, ц). Здесь i (у, ц) ищется в виде ряда
I (у, й) = « 2 (у, й) + - • + V (у, ц) + V+1 (у. ц), (47)
где 1;(у,ц), 1—2,...,г — однородный вектор-многочлен /-го
порядка от координат у\,У2,...,Ук вектора у, а вектор-
многочлен ir+i(y,p) содержит члены не ниже (г+1)-го по-
рядка по переменным у\,Уг,...,Ук-
Система уравнений (46) позволяет однозначно опреде-
лить коэффициенты многочленов i,-. Подставляя разложе-
ние (47) с неопределенными коэффициентами в (46) и при-
равнивая коэффициенты при соответствующих членах в ле-
вой и правой частях, получим систему уравнений относи-
тельно неопределенных коэффициентов.
10.4. Исследование бифуркаций в понижающем импульсном
преобразователе без учета запаздывания
модулируемого фронта импульса
Метод исследования, основанный на нахождении непод-
вижных точек отображения последования ППН с помощью
изокривых (см. § 10.1), пригоден только для систем второго
порядка. Более эффективен и универсален аналитический
метод, основанный на теории бифуркаций. Ниже этот метод
иллюстрируется на практических примерах.
Разложение отображения последования в ряд Тейлора
Этот этап необходим для приведения отображения к кано-
ническому виду. Разложение отображения х = f(x) в ряд Тей-
лора в окрестности неподвижной точки nN имеет вид [74]
ЕаГ(х^+Ь)-Г(хл)=а1+^Г®(х^Х^М+^1®(х^)(11,11,||)+..., (48)
475
где С — матрица Якоби отображения; f (2\ x7V)(hl,h2) — второй
дифференциал отображения, представляющий собой билинейный
оператор, линейный по каждой из векторных переменных hi и h2
при фиксировании другой переменной; f<3)(X7V)( h!,h2,h3) —
третий дифференциал отображения, представляющий собой трили-
нейный оператор, линейный по каждой из векторных переменных
hi, h2, h3. Аналогично выглядят остальные члены ряда (48). Для уп-
рощения записи зависимость ряда (48) от параметров не показана.
Отображение последования понижающего ППН неявное
и задается равенствами (8.75), (8.71). Его первый дифферен-
циал с учетом выражения для матрицы Якоби (9.3) есть
fXxjJh^Ch^
АН ) Y Л1Ь
А(Тп) dt0 ( VB)dXJh‘’
где согласно (9.7), (9.13) и (9.22)
^ВД=А(т)Вн; То)=-А(гп-то)Ви;
G Т GTq
dr0 _ || dip дт0
dx j ’ dx2
Sep _ || Sep
Sx || Sxj ’ ол2 о п
= - ~~ут~сТ^(т1 -тз1)(Анх + Bhv).
St0 St( тп Un
(49)
(50)
(51)
(52)
Второй дифференциал отображения определяется диф-
ференцированием первого дифференциала (49) по опреде-
ленным правилам [74]:
f(2)(X^)(h15h2) = ph2phlf(Xjv)= -£ f цх^ь/к =
Cl A x. Cl Л. J
_ d ГЛВ^-Ц v^'r0|1"||I _ В(тп-т0) v \^Tof^T°h'l
“4 dt0 (V Чх^ [~^r (V-VB) dxldxhlJ
-4) A-l
dt0 Jdx\dx JJ 2
476
где производная по вектору х произведения матрицы-строки
cfio/dx на столбец 112 определяется по правилу:
чп z/b « т du
а — + Ьт —
5х dx
(53)
Тогда, поскольку вектор h, не зависит от х,
J f h 1 - h? f
dx( dx 'J ' dx\ dx
(54)
где введена квадратная матрица частных производных вто-
рого порядка от то по переменным хь х2:
d Г 5т0 Y
dx dx J
Окончательно получим
^0
дх2 dXiSx2
д2т0 52t0
SxiSxj Sx2
(55)
Г®(хя)(Ь„Ь2) - '».)(, - T,)fehl]feh2k
_^pJo)(v_vB)(h?T2h2), (56)
GT0
где —3th,-
dx
i = 1,2 и h[T2h2 — скалярные величины.
Аналогично, дифференцируя выражение (56), находим
третий дифференциал:
_ ,n )fe h, ’]('*» ь, )fe ь,) -
Jtq \dx ){dx J\dx J
Л2В(тп-т0)
^hiW2h3 +f^-h2lh[T2h3 +
+ f^-h3lh?T2h2
{dx l
^_3o_)(v_vB)hiTT3(h2)h3, (57)
«To
477
где
T3(hf) = ^-(T2hf). (58)
дх
Получены выражения для дифференциалов отображения
последования понижающего ППН до 5-го порядка включи-
тельно [75]. Входящие в эти выражения производные матри-
цы В(тп-тр) по времени т0 найдем дифференцированием ра-
венства (9.7):
-2о) = (_^А(Тп _То)А^-1Вн) (59)
где &= 1,2,..., А°=1.
Равенство (58) запишем в виде
Т3(Ь;)
d |T2i*b|
II Т22»К'
^(Т2,.ь,)
£(ТИ.М
, т ЛТ21.
' dx
т </т22«
' dx
где при определении производных
3 ГЗф) _ 32ф 32ф Зт0
ЗхДЭх^ ox2 SxjStqSx! ’
3 f Эф^ _ 32ф 32ф3то
3t03x! 3tq3X!
учтено, что в выражениях (51), (52) время tj = т0 + тз] - тз2
является неявной функцией X! и х2. Тогда получим
32т0
Эх.2
32Ф [ Зт0
Эх2 3*1
2 32Ф + 32ф Эт0
Sx^Tq ЗтцЗХ!
(61)
Аналогично найдем
л2
3 т0
3х[3х2
32ф 8т0 32ф Э2фЭт0
ЗХ]Зх2 Зх2 SxjStq 3tq Зх^
32ф Эт0
Q Зх^
/Зф .
/ Зт0’
32т0 _ 32ф^Э'г0 32ф ^Э2ф8т0> /Зф (62)
Эх2 [.Зх! ' 5х2к Зх23то ’ 3x2J]/ 8т0 ‘
В выражениях (61), (62) согласно (51) и (52) имеем
где Т21. и Т22» “ первая и вторая строки матрицы Т2 и учтено
правило (53) определения производной по вектору произве-
дения строки на столбец;
3 то а т0 З3то дЗ а т0
8Х13 3х23х, . ^т22* _ Зх2ах, ах(ах,2
dx З3то дЗ 3 т0 dx д3 3 т0 дЗ а т0
ах2ах2 axjax2 axj3x2 Зх2
(60)
Входящие в равенства (55), (60) частные производные
времени tq по координатам вектора состояния определяются
дифференцированием равенства (50):
8 Г Зф
дхг <3%!
Эф Эф 3 [ Эф ] (Эф
8т0 3xj ох((3t0J _|/ (Зт0
а2ф _ з2ф _ э2ф _ Q.
дх2{ 3xj3x2 Зх2
э2ф || а2ф з2ф 1 т., ч.
~-= = /гс a(ti -тз1)Ан; (63)
oXc^Tq 3xqЗтq
я(*) 1
^P = --UTA(T1 -тз1)А^(Анх + Вну). (64)
Частные производные третьего порядка
З3то
8x1
+ Зт032ф । 32ф
Эх3 Эх2 k3xj Зтр ЗХ[Зт0,
8тоу З3ф
SxJ
ЗтрУ Э3ф + 3 Зт0 З3ф /Зф .
3xJ Эх^то dxi 3x23t0_ / Зт0 ’
479
478
d2cp 4
дх2дт0>
д3т0
ox28x2
d3(p + 32t0 Sig 32<p +
Sx2dx2 3x2 ^dx2
2 s2t° fs2o 3jp + d2(P 1 + (f£LQ + g3(P
dxtdx2 (j?X] 3x2 SxiStoJ t&cj (3x23XjJ Зх2атр,
+ ЭтоГэЭто d3(P + g3<P + 2gTo g3(P /дф .
ax2 ( 3xi ax^Tp ax2a-c0J faj axiax2a-r0]/ St0 ’
(65)
_d3*o_ = _ э3ф + а2т0рт0а2ф + a2<p +
ax^x2 [ax^x2 ax2 tSxi Зтр 3xiStoJ
2 а2т0 Гат0а2<р + a2<p + (атоуртоа3ср + a3cp )
dx1dx2 ^3x2 Зтр 3x2aT0J (ax2J |^ax( Эх^Тр J
+5x0 (25tq э3ф + a3cp + 23xp a3<p /a<p.
axj [ ax2 dx2a?l 8x28t0) ax2 ах]3х2атоJ/ Зт0 ’
d3T0 = a3<p [ 3а2т0рт0а2ф | a2<p "j t рт0)3а3<р t
dx2 |_3x2 ax2 [ax25T2 ax28T0J [axj
! 3pToV d3<p t 33то З3ф /з<р
ISxJ ах23т2 3x2ax223T0j/ 8t0 ’
где согласно (51) и (52)
з3ф а3ф __ а3ф _ а3ф _
8х3 Зх2Зх2 8хх8х2 8х2
з3ф _ а3ф з3ф
8х8тр Зх^Тр Зх2атр
"тГС'А^1 ^T3!)Ah;
и п
остальные частные производные третьего порядка от функ-
ции ф(х,т}) входят в матрицу
3
Эх
а2ф а2ф
Зх^тр ’ Зх2Зт0
з3ф а3ф
Зх2Зт0 8х13х2ахо
а3ф а3ф
Зх1ах2ат0 зх2ат0
480
= _ J_A*ALC(tl - Тз1)с]= --J-A* — Ат(т! - тз1)с$5 =
Un Эх1 11 17п hStq ' 1 317 dx
При hj=||^l,^| , /=1,2,3, ряд (49) запишем следующим
образом:
h = Ch + R(h,h)+S(h,h,h)+..., (67)
где R(hi,h2) и S(h|,h2,h3) — однородные вектор-многочлены
второй и третьей степени соответственно. С учетом выраже-
ний (49), (56), (57) получим
R(hb ь2) = RiA/A’ + R2(W + ^2)+ R3ffi; (68)
где
S(hbh2, h3) = S^Aj + S2 (a/A^A/ + A/A^Aj + А^А^ч
+ S3 (A/A2 A32 + A^A^A2 + AfA2A3)+ S4A2A2A3, (69)
II D || ____
R, = n , i = 1,3; S; =
Sy
$2i]
/ = 1,4.
Формулы для вычисления компонент векторных коэф-
фициентов R;, S, ряда (67) получаются при учете полученных
выражений (49), (50), (55) - (58), (60) и (8.76):
Ау1 =
lv j2MTn -ToXfroV
2 dtp 4Sxj
^41 (тп ~то)э2то
(кц dx[
_ _ 1 ^/i(Tn to)Stq Stq i d Ayi(xn tq) g tq
y2 2 1 dt(j dx2 dxl дхудх2
(70)
^/l(Tn To)^ To
*0 ЙХ2
+ A’yi (tn t0 ) S3t0
Ao dxf
481
V __1ГА1(тп-то)Г5тоУэго d\(Tn -т0)Сбт0 52t0
6 [ Jtq 13X1J dx2 JT2 8хг 8x^X2
| 3 tq dtp +^Ьу](тп Тр) Э Tp
ex2 3x2 J rfTp aXj2ax2
о 1 d3bfl (tn - t0 ) gxp ^дт0 Y
j3 6 1 Лр ax^xj
) ^2^/1(тп ~то) Зт0д2тр ।
d-Гр Isxj Sxj
! 2 д2т° 5X0
Sxj&tj 3x2
^ji(Tn~To) 33t0
d^o 8xt8x2
(71)
1
6V1
d ^ji^n To)(3t0у + зd2bjX(Tn -T0)gTp g2Tp
dtp (3x27 rft2 3x2 gx2
| dbjl(xn -tp)g3T[)
dt0 gx2J’
где j=l,2. В разработанной программе для ЭВМ производ-
ные, необходимые для вычисления этих коэффициентов, оп-
ределялись по приведенным аналитическим соотношениям
(59) - (65). Они могут быть найдены и численными метода-
ми, что, однако, существенно увеличивает время, необходи-
мое для их вычисления.
В одном из вариантов программы вычисления проводились
непосредственно по матричным соотношениям (48), (49),
(56) - (60), без их преобразований, с помощью программы
матричных вычислений MatLab.
Цля значений параметров, при которых построены кри-
вые на рис.8.13, решение уравнений (10.4), (8.71) дает коор-
динаты неподвижной точки х1Л, = 0,402998, х2Л- = 0,640187, а
из формул (67) - (69) при ht =h2 =h3 = h=||ft1,ft2|| следует
hl = -1,49886л1 - 23,1828ft2 + 1,12286 (ft1)2 -
- 4,95824ft’ft2 -134,372 (ft2 )2 + 0,266191 (ft1 )3 +18,9723 (ft1 )2ft2 +
+ 12,30492ft1 (ft2)2 - 1219,31 (ft2)3;
ft2 = 0,0045667ft1 + 0,233486ft2 - 0,0826599 (ft1 )2 -
-2,20284л1/!2 -13,0956(ft2)2+ 0,108062(ft1)3+0,825084(ft1 )2ft2 -
- 18,80457ft’ (ft2)2 -156,936 (ft2)3.
Задаваясь значениями ft1, ft2 и вычисляя значения
ft1, ft2, xl=xw+hl, X2=X2n+h2, xx=xlN+h\
x2 = х2Л- + ft 2, получаем графические значимости, которые
практически совпадают с правыми участками кривых на
рис.8.13. Это подтверждает правильность выражений для ко-
эффициентов, входящих в соотношения (67) - (69).
Приведение отображения последования к каноническому виду
Предположив, что матрица Якоби С имеет два действи-
тельных собственных значения и Х2, воспользуемся мето-
дом проекций, который уже использовался в § 10.3 для слу-
чая комплексно-сопряженных собственных значений. Для
этого рассмотрим проекцию приращения вектора состояния
h на подпространство, порожденное собственными векторами
qf и q2, соответствующими собственным значениям и Х2:
h = Ph = [qi(q'1)T+q2(q2)T] b = J’iqi + Уг<Ь’ (72)
где qi и q2 — левые собственные векторы матрицы С, соот-
ветствующие собственным значениям X] и Х2;
Ji =(4i)Th> Уг =(q'2)Th (73)
— проекции вектора h на векторы q, и q2.
Правые и левые вещественные собственные векторы
матрицы С в (72) выбираются так, чтобы выполнялись усло-
вия биортогональности:
(q'i)Tq! = 1; (ч'гГчг=1; (q'i)T<i2 = °; (ч'гГч! = °- (74>
Поскольку правые собственные векторы матрицы С яв-
ляются решениями уравнения (Z.,1 — C)qz- = 0 с вырожденной
282
483
матрицей Xfl-C, в качестве q, можно взять любой ненуле-
вой столбец присоединенной матрицы
adjM-ChK^ , С1!
II С21 \’-с11
Будем искать их в виде
41 =«i
^-1 ~с22
С21
Ч2
= а2
^•2 -с22
С21
где ai и а2 — коэффициенты нормирования.
(75)
Аналогично в качестве левого собственного вектора мат-
рицы С, соответствующего собственному значению мож-
но взять любой ненулевой столбец матрицы
adj(M-CT) =
Х(- — С22 С2[
С12 \-с11
в частности
(76)
Пример. Проверить, что векторы q2 и q], q2 и q2 ортогональны
при любых cq и а2.
Действительно,
(Qi) Чг - аг||^1 -с22>с1г||
Х2 - с22
<2!
- <*2 [ (^1 - с2г)(^2 - с2г)+ С12С21] =
- а2[Л]Х2 — с22 (Х[ + Х2)+ с22 + с12с21
где
Ч2 = -Cil+Cn ± j С| 1 *С22 | _detC ; XjX2 = detC; Xj + X2 = cu + c22 .
z V k z )
Поэтому (q,) q2 = a2[detC - e22(eH +c22)+c22 +c12c2l]=0. Аналогично
(q'2)Tqj = cq||X2-e22,el2|| 1 Си
II C21
-al[(^2 C2z)(^l + C21) + C12C21] - 0 -
Подставляя выражение (75), (76) в первые два равенства
(74) (условия нормирования), находим:
1 1
ai = т.-----й’ “2 = 7-------------\2-------
(щ~с22) +с12с21 ОЧ “ с22) + с12с21
Учитывая линейность по каждой из векторных переменных
h, дифференциалов, входящих в равенство (48), и правило диф-
ференцирования отображения f(x) по вектору yjQj + y2q2 [74]
f WiQi + = 7)zqi+y2q2f (x) = (x)+ y2Dq2f (x),
при hi =j1qi + v2q2 можем записать:
Г(2)(х)(у,Ч1 + y2q2,h2) = yif(2)(x)(q1,h2)+y2f(2)(x)(q2,h2)-
Теперь, если положить h2=hj = Ь = у^] +y2q2, получим:
f(2)(x)(yiqt 4-y2q2,n<li + ЗМг)" Jibf(2)(x)(4i,<h) +
+y2f(2)(x)(qI,q2)]+y2kf(2)(x)(q2>ql)+j2f(2)(x)(q2^2)],
где в силу симметричности дифференциала относительно лю-
бой пары аргументов имеем
f(2)(x)(qi,q2) = f(2)(x)(q2,qi)-
Тогда при h, = h2 = y^j + y2q2
f(2) (x)(hi, h2)=yi2f<2) (x) (qT, qi)+2У1 у2Г(2) (x)(qi, q2 )+y|f(2) (x)(q2, q2).
Аналогично при Iq =h2 = h3 = y^i +y2q2 можем найти
f(3\x)(h15 h2, h3) = y13f(3)(x)(qI,q1,qi) + 3y12y2f(3\x)(q1,qi,q2) +
+ ЗУ1У2 f (3)(x) (Qi, q2 > q2) + ?2f (3)(x) > q? > q2) • (78)
Умножив равенство (48) слева на левый собственный
вектор (q')T, с учетом выражений (73), (77), (78) и
(q-)TC=lf(q'-)T получим уравнения в канонической форме:
у,- = Х.,у;- -I- МцУ1 + М12У1У2 + Л^-зУ2 + т А12у2у2 +
+ ^(3JiJ2 +^Z4J3 +-. (79)
где г—1,2; коэффициенты однородных многочленов
484
485
Ма = ^(q;)Tf(2)(x)(qi,qi); Mi2 = (q;)Tf(2)(x)(q1,q2);
Mi3 = |(q;)Tf(2)(x)(<bq2);
Mt = g(qOTf(3)(x)(qi>qi,qi); M2 = |(q/)Tf(3)(x)(qi,qi,q2);
M-3 = |(q'<)Tf(3)(x)(<ii>q2,q2); M-4 = i(<n)Tf(3)(x)(q2,q2,q2)
z о
выражаются через скалярные произведения левого собствен-
ного вектора q, на производные отображения по правым соб-
ственным векторам.
Подставляя в эти формулы выражения для правых собствен-
ных векторов qy =| q},qj || , с учетом формул (67) - (71) получаем:
Мц = W/iU)2 + 2mi2q^ + mi3(qff;
Mi2 = 2[т^2 + mi2\q{q2 + 9i2<72) +
Mi3 = + lmi2q\q} + m^qff;
Nn = Rifely + Qi + У + «mG?)3; (80)
M2 = 3 n,lUy Q2 + «/291 felM + 2gfg2) +
+ niiq^q{q2+qlq2\+ni4^'f q\ ;
Мз=3 +9i2d)+«/3922fe +2q^)+f71-4q^)2 ;
+ 3л,-2 )%2 + 3«/3<?2 (q2 J2 + «,-4 Й f,
Ni4 = лп
где
ту
nu
|т?2 j 1,3;
S2J
(81)
1,4.
Дальнейшее упрощение отображения, задаваемого урав-
нениями (79), возможно приведением его к нормальной фор-
ме, в результате чего в правой части остаются только члены,
которые становятся резонансными на границе устойчивости
486
простой неподвижной точки. Однако не будем проводить гро-
моздких преобразований, необходимых дня приведения отобра-
жения к нормальной форме, поскольку уравнения (79) уже при-
годны для применения теоремы о центральном многообразии.
Нахождение инвариантного многообразия
и уменьшение размерности задачи
При рассмотрении бифуркаций, связанных с выходом од-
ного собственного значения из единичного круга, когда другое
собственное значение остается внутри единичного круга, ин-
вариантное многообразие представляет собой кривую на плос-
кости pj, У2- Согласно § 10.3 ее будем искать в виде ряда
У1 = с}у2 + с2у2 + c3yl +, (82)
где коэффициенты с\, с2, с3,... определяются из условия ин-
вариантности. Тогда справедливо также равенство
.У1 - с1Гг + с2Уг + сзУ? +'’' >
в которое необходимо подставить у, и у2 из (79), а вместо
У1 — выражение (82). В результате получается уравнение
X-i(ciy2 + с2у2 +с3у^)+ Mn(c^yl +2с1с2у1)+ М12^у1 +с2у^)+
+ Ml3y2 + Nuc^y2 +Nl2c3y2 +^}3с1у2 +Nl4y2 + ... -
= С1 [*-2У2 + ^21(С?У2 + 2с1с2У2)+ М22^1У2 + с2У1)у2 + ^23^2 +
+ TV2lCjy2 + ^22С\У2 + ^23С\У2 +^24.У2] +
+ с2(х.2у2 + 212.М21с12у2 +2121И22С1У2 +2Х2М23у2)+ с3Х32у2 4-...,
которое преобразуется к виду
^-1С1У2 3"(^jC2 + [С| + Л/[2С| + ^1з}у2 *"(^1^3 3"2Afj[C[C2 +
4- Мпс2 4- Nncf 4- Nncl + 7V13C! + Nl4)y% + - = №2 +
+ (^2ici +Л/22с2 + Л/23С] +с2Х2)у2 +^2М21с12с2 + М22с1с2 + (83)
+ N21Су 4- N22cf + N23c3 4- N24Cy 4- 2X.2Af21cfc2 4-
4-2Х2Л/22С|С2 + 2Х2Л/23с2 4-с3Х.2^у2 4-_
487
Приравнивание коэффициентов при одинаковых степе-
нях у2 в левой и правой частях равенства (83) дает уравнения
относительно q, с2 и с3, откуда, поскольку Х,^Х2, следует
„ -2Х2М23 2V,4 _(М12-2Х2Л/23)Л/,3 TVI4
сз ~---5-------с2 + -------;-----г~,-----+1-------
4-х, 4-х, (4-х,)(4-х,) 4-^
Отображение (79) на инвариантной кривой (82) принимает вид
у2 - ^-2^2 + ^23У1 + С^22с2 + N24)у2 + ... (85)
у, = (Х,с2 + Af13)y2 +(Х,с3 + М12с2 + ^,4)^2 + •• (86)
В связи с тем что бифуркация вызывается переходом
собственного значения Х2 через значение -1, определим так-
же квадрат отображения (85), (86):
у2 = Х2у2 +Ьу2 +ау2 + ...; (87)
у, = (Х,с2 +М,з)Х2у2 + Х2[2М23(Х,с2 +Л/,з)+
+ Х2(х,с3 + Л/,2с2 + TV14)] у2 +..., (88)
ГДе С1 = Х2[2М2з + + ^-2^(.^^22^2 + ^24)]’ = -^23^*2 О Х2)-
Отображение (87) имеет неподвижную точку y2jv=0 и две
неподвижные точки, определяемые уравнением
оу2 + by2 + Х2 -1 = 0,
откуда
-Ь±
у! Ь2 -4д(х22 -1)
2а
Результаты расчетов на ЭВМ
На основе полученных соотношений разработана и реали-
зована программа расчетов на ЭВМ. Расчет координат xlN, x2n
простой неподвижной точки, вычисления элементов матри-
цы Якоби С, собственных значений этой матрицы Xj, Х2, на-
хождение критических значений параметров Адкр, Аот кр про-
изводится так же, как и в описанной ранее программе расчета
динамических характеристик ППН. Программа дополнена
488
процедурами, обеспечивающими исследование поведения
импульсного ППН при изменении параметра в окрестности
критического значения:
1) по формулам (70) вычисляются коэффициенты 7?;;, Sj,
разложения отображения в ряд Тейлора;
2) по формулам (75), (76) вычисляются координаты пра-
вых и левых собственных векторов матрицы Якоби в непод-
вижной точке х^;
3) по выражениям (80) организовано вычисление коэф-
фициентов Му, Ny, входящих в равенства (79).
Для каждого значения варьируемого параметра проводятся
указанные выше вычисления, и соотношение (85) задает впол-
не определенную функцию последования На
рис. 10. И представлены графи-
ки функции последования для
0о=Ю; 9=9б=0,2; vi=l; А^=40;
и=0,7; 4ЬС/Т = 2,5; v2=0 и
двух значений Лщ. При кри-
тическом значении со-
ответствующем Л.2=-1, про-
стая неподвижная точка
(У1дг,У2Лг) ~ (0,0) становится не-
устойчивой и из нее рождается
цикл двукратных неподвиж-
ных точек 7Vb 2V2. Как видно из рис.10.11, с ростом при
Аот > Адг.кр амплитуда колебаний возрастает. Двукратные непод-
вижные точки могут быть найдены как непосредственно из гра-
фика функции последования (рис.10.11), так и по формуле (89).
На рис. 10.12 приведены бифуркационные диаграммы,
представляющие собой зависимости координат y2AP Угл не-
подвижных точек Ар, N2 от и Kq для указанных выше
значений остальных параметров и Aq=40 (а), 7^=0 (б). Оп-
ределив по (82) значение уь соответствующее найденному
значению у2, по формуле (72) можно найти приращение «старых»
координат Л1 =у191| +y2q2 > =У^1 +У2^2 > зависимости которых
489
от параметра также приведены на рис. 10.12. Для сравнения на
рис. 10.12 штриховыми линиями показаны точные зависимости,
рассчитанные по методике, изложенной в § 10.1. Эти зависимо-
сти проверены экспериментально. Относительные ток и на-
пряжение, например в неподвижной точке находятся из
равенств x1Afj = xlN + , x2yV[ = x2w + •
Различия бифуркационных диаграмм, построенных по
изложенной методике, и точных зависимостей увеличивают-
ся по мере удаления от критического значения параметра.
Необходимо учитывать, что равенство (89) дает дополнительную
погрешность, обусловленную отбрасыванием членов выше
третьего порядка малости в (87). Кривые на рис. 10.12 определяются
точнее, поскольку при их расчете формула (89) не использовалась.
490
Как видно из рис. 10.12, а, при Xq=40, /^=0 система ус-
тойчива, поскольку, как показывают расчеты, Kq<Kqkp=
=42,1607; собственные значения и Х2 комплексно-
сопряженные и располагаются на окружности с радиусом
exp(-tjn)=0,941764 вблизи левой границы единичного круга.
Введение обратной связи по току дросселя фильтра приводит
сначала к перемещению X] и к действительной оси, отдаляя
их от единичной окружности, при A^r=0,13 и 12 сливаются
на действительной оси, достигая значения A,I=A.2®:-0,85.
Дальнейшее увеличение приводит к перемещению Х.2
влево по действительной оси, a Aj — вправо. При Ащ®0,16
(Х2»-1, Л.1=-0,7269) нарушается устойчивость простой непод-
вижной точки с координатами х1Л-=0,454593, х2лг=0,679359,
происходит мягкое возбуждение колебаний на частоте f/2.
С ростом К(у,- изменяются и координаты простой непод-
вижной точки, которая стала неустойчивой, но мы отсчитываем
приращения координат А1 и Ji2- от этой точки. Например, при
/^=0,4 эти координаты х1Лг=0,447502, х2дг=0,675115, токовая
координата одной из двукратных неподвижных точек
x^^lv+Йдг увеличивается на А^=0,155846, т.е. примерно на
34%, а координата второй уменьшается на -А^2 =0,126275, т.е. на
27 %. Отклонения относительного напряжения х2 за счет колеба-
ний удвоенного периода при Aqt=0,4 составляют йД =0,00106
и А# =-0,00174, т.е. не превышают 2,5%. Это приводит к со-
ответствующему увеличению пульсаций выходного напряжения.
Аналогичные пояснения могут быть даны к бифуркаци-
онным диаграммам на рис.10.12,5, соответствующим А'от=0.
10.5. Нормальные формы отображений последования
в окрестности неподвижной точки
Теоретические основы
Рассмотрим отображение f: Сп-*Сп, заданное формаль-
ным степенным рядом
х = f(x) = Ах + <р(х), (90)
491
где А — квадратная матрица размера и; <р(х) — степенной ряд,
содержащий члены степеней не ниже второй; f(0)=0.
Пусть 1=|Л1,Х2,...,ХЛ[ — вектор собственных значений
матрицы А. Резонансом называется соотношение
= (91)
где т=|/и1,/и2,...,/лл||, тк >0, ^тк >2, Zm= ...X™".
Л=1
Например, при п=1 резонансными собственными зна-
чениями являются 0 и все корни любой степени из единицы,
все остальные числа Л. нерезонансные [68].
Если ряд (90) содержит только резонансные члены, для
которых выполняется условие (91), то он называется
нормальной формой. Согласно теореме Пуанкаре—Дюлака
всякое формальное отображение (90) с диагональной матри-
цей А формальной заменой
х = Н(у)= у + h(y), .(92)
где h(y) — однородный вектор-многочлен степени г > 2, при-
водится к нормальной форме
y = Ay + w(y), (93)
где ряд w(y) состоит только из резонансных мономов [68].
Учитывая замену (92), из (90) получаем:
H(y)=f(H(y)),
откуда
у = Н1 (f (Н (у))) = Н 1 о f о Н(у), (94)
где fj =Н 1 о f оН — композиция отображений Н'1, f и Н.
Из равенства (92) имеем следующее выражение для об-
ратного отображения, определяющего замену переменной,
н'(х) = у = х - h (х - h(x)) +... = х - h (х) + — h (х)+..., (95)
492
где многоточие и
dh. 1 \
— h (х) есть степенные ряды, содержащие
dx
степени выше г. Кроме того, на основании (90) можем записать
х = f (Н(у)) = АН(у) + <р(Н(у)) = А у+Ah (у) +ф(у + h (у)) =
=Ау+АЬ(у)+ф(у)+ h(y)+..., (96)
где многоточие и выражение 4^ h(y) представляют собой
dy
степенные ряды, содержащие у в степени не ниже третьей
(под степенью у понимается степень мономов (одночленов)
У?У?-у”п).
Теперь на основании (95) и (96) имеем
у=х-Ь(х)+...=Ау+АЬ(у)+ф(у) + h(y)'
-h(Ay+Ah(y)+ф(у)) +... = Ay + ф(у) + Ah(y) - h(Ay)+
[АЬ(у) + ф (y)]+, (97)
У=Лу
где многоточие означает члены степени выше г, а выражение
d<? , dh
jr h(y)-~T
d У dy у=ду
(92) на члены ряда степени г+1.
[Ah(y)+ ф(у)] учитывает
влияние замены
Как видно из (97), при выполнении уравнения относительно h
Ь(Ау)-АЬ(у)=ф(у), (98)
называемого гомологическим, ряд ф(у) устраняется из выра-
жения (97).
Выражение h(Ay)-Ah(y), входящее в (97) и (98), является
однородным вектор-многочленом степени г, линейно завися-
щим от h. Покажем, что линейный оператор Мд, определяе-
мый выражением
MAh = h (А у) - A h (у), (99)
на пространстве однородных вектор-многочленов имеет соб-
ственные значения 1“ - и собственные векторы
493
h(x)=xmes, где моном х^х^’х™2 хп“ ~ скалярная величи-
на; es — вектор-столбец, у которого 5-я компонента равна 1,
остальные — нулю. Векторы е5 образуют собственный базис
оператора А, т.е.
А е5 = Х5еs, 5 = 1,2,..., п.
Для простоты собственные значения Xs оператора А предпо-
лагаем различными.
Рассмотрим равенство, вытекающее из (99) при подста-
новке вектора h(x) вместо Ь(у),
MAh(x) = MA(xme5)=(Ax)% -Ахте5,
поскольку h(x)=xmes, то h (А х) = (А х)т е5;
(Ах)и =(м1Г1(^2Г2-(МйГл =
ПЛ Lm„ )_ „т-1 „ /Т1" Л 1 „т„
"*А *-s ) - А ~ Л - '.л - ) л -
Отсюда следует, что вектор h(x)= xmes есть собственный
вектор оператора МА с собственным значением km - Xs. Следо-
вательно, матрица оператора МА в базисе из собственных
векторов имеет вид
Xm-Xi 0 ... О
М4= 0 ° . (100)
о 0 ... кт-х„
Эта матрица невырождена, если набор собственных значе-
ний матрицы А нерезонансный. В этом случае оператор МА
обратим, а гомологическое уравнение (98) имеет решение.
Если, например, в уравнении (98), записываемом в виде
МАЬ(у)=ф(у), (101)
ф(у) представляет собой вектор-одночлен (моном)
ф(У) = суше5,
494
где отлична от нуля и равна суш только s-я компонента, то
решением будет также вектор-моном
Ь(у) = Ма1ф(у) = -^-у1Ч. (102)
к
Таким образом, если в исходном отображении (90) с диаго-
нальной матрицей А <р(х)=<рг(х) — вектор-моном степени г, то
для устранения слагаемого <р(х) решается уравнение (101) делени-
ем коэффициента с на 1“ - и делается подстановка х = у + h(y).
Практические примеры
1. Отображение последования понижающего ППН с различ-
ными вещественными собственными значениями матрицы Якоби.
Отображение, задаваемое уравнениями (79), запишем в виде
у =Ay+M(y)+N(y)+..., (103)
где однородные вектор-многочлены второй и третьей степеней
2
М (у) = £му+1У!2-у^ = £ Мшуш ;
7=0 "W2 (104)
N(y)=£N,.+1y^= £ Nffly“;
7=0 Лг1+т2=3
_ m.-li —
M.-=L, ; 7=1,3: N; = I , L 7 = 1,4 — векторные коэффи-
||М2у|| 7 Р2У|
циенты; для более компактной записи введены т=||/И1,/и2||
— векторный показатель с целыми компонентами тк > 0; Мш
и Nm — коэффициенты при мономе уш; ym ~ мо-
ном с векторным показателем степени m (еще раз обратим
внимание на то, что моном у® — скалярная величина) [77].
В соответствии с записью (104) условиями резонанса
(91) для однородного многочлена второй степени М(у) будут
= X.2 j j X-s = X2, s = 1,2.
При Zj * ±1, = -1 не может выполняться ни одно из этих
условий ни при одном значении s.
495
Условия резонанса для многочлена третьей степени N(y)
(резонанса третьего порядка):
Х5 = Xj j Х5 — A.jZ-2 j Х5 = XjX2’ = ^2» = 1Д.
При X] * ±1, Х2 = -1 возможно выполнение третьего условия
при 5=1 и четвертого при 5=2:
Ху = ХуХ2 , Х2 — х*2,
откуда, поскольку Xf * 0, Х2 * 0, следует одно и то же равенство
1 = Х2 .
Таким образом, резонансными являются мономы
NsJiJ’L N4Z>>
которые не могут быть устранены в нормальных формах.
Для устранения однородного многочлена М(у) из ряда
(103) замену
у = z + h(z), z = ||zi,z2||T, (105)
выберем так, чтобы однородный многочлен h(z) удовлетво-
рял гомологическому уравнению (98), которое в данном слу-
чае имеет вид:
b(Az)-Ah(z)=M(z), (106)
где
h(z)=h|Z2 + h2^|^2 + h3z2, (107)
и поскольку
Az=h °|| 4 = |MI,
II 0 Х2|| Z2|| II ^2^2 II
ТО
h(Az) = hjXj^2 +h2X[X2Zi^2 + b3X2^2 -
Тогда, подставляя в уравнение (106) выражения для h(Az) и
h(z), получаем:
(х2!-Ajhj^j2 + (ХДг! - A)h2ZiZ2 + (х21 - A)h3^2 =
= M1Z12 + M22122 +М3г2 ,
496
откуда, приравнивая векторные коэффициенты при одина-
ковых мономах zm, записанных слева и справа, находим:
Ь1=(^1-л)ЧМ1;Ь2=(Х1Х21-^"1М2; h3 =(а.221-л)‘'м3 ,(108)
где
(;mi-лУ1=I^m_^’ ° I 0 I
1 ' I О I 0 (x”-4T
Iй= X.'JU"2, ml + m2 = 2, mk > 0, к = 1,2-
Таким образом, в результате замены (105) с многочленом
(107), коэффициенты которого выбираются по формулам
(108), отображение (103) преобразуется к виду
z = Az + N(z) + ..., (109)
где однородный многочлен N(z) в общем случае отличается от
исходного (104). Однако его коэффициенты Ny будем обозна-
чать по-прежнему.
Чтобы уничтожить нерезонансные мономы однородного
многочлена N(z), многочлен h(w) в замене
z=w+h(w), w = |w13w2|T, (И0)
выберем следующим образом:
h(w) = h,W|3 + h2w2w2. (Ill)
Тогда гомологическое уравнение (98) будет иметь вид
h (Aw) - Ah (w) = Npvj3 + N2w12w2
или с учетом (111) -
— л)+ (х2Х21 -л)ь2к121г2 = F^w3 + N2w2w2 . (112)
Отсюда следуют уравнения относительно коэффициентов Ь1з h2
(х3! 1 - A)hi = Nj; (х^21 - A)h2 = N2,
497
которые просто решаются:
О (>Ла.2-а.2)
Итак замена (НО) полностью определена. В результате
получается нормальная форма отображения (103):
w = Aw + N3w1w2 + N4^+...,
(Н4)
в которой уничтожены все нерезонансные мономы второй и
третьей степеней.
2. Отображение понижающего ППН при комплексно-
сопряженных собственных значениях матрицы Якоби.
Обозначив в этом случае собственные значения через X
и Л*, правые собственные векторы получим из (75):
где звездочка означает комплексное сопряжение; коэффици-
енты нормирования
--- » —------------------------------•
~ с22) + с12с21 (Л* - С22)2 + С12С21
Левые собственные векторы определяются по (76):
^~С22
С12
q =
; q =
~С22
с12
(П6)
Вместо условий (74) используются условия квазибиор-
тогональности [10]:
(q')Tq = l; (q'*)Tq* = l; (q')Tq*=0; (q'*)Tq = O.
498
Для приведения отображения (67) к каноническому виду
используется замена (29), где w-О, т.е.
h = Ph = zq + Z*q*> (117)
где согласно [ 10] матрица проектирования
Р -q(q')T+ q*(q'*)T.
Следовательно, новые комплексные координаты z = (q')Th,
£*=(q”)h представляют собой проекции вектора h на ком-
плексные левые собственные векторы.
Тогда аналогично (79) получим:
z = \Z+MlZ2 + M2ZZ* + M3Z*2 +
+ N}z3 + N2z2z* + N3zz*2 + N4z'3 + ...,
Mi = |(q')Tf(2)(x)(q>q); ^2 =(q')Tf(2)(x)(q>q‘);
2 1 , (И9)
Mi = |(q')Tf(2)(x)(q*.q’);
Nt =|(q')Tf(3)(x)(q,q,q); N2 = |(q^f^(x)(q,q,q‘);
N3 =i(q')Tf(3)(x)(q>q’,q‘); N4 = |(q')Tf(3)(x)(q*,q*,q*).
При подстановке q=||4i,92||T эти коэффициенты преобразу-
ются к виду, аналогичному (80):
Mi = m^i2 + 2m2q}q2 + /и3?2;
М2 = + m2^q2 +?291)+ тз^]',
М3 = (tff j2 + 2m29i‘^ + i
М = + 3n2qlq2 + 2>n3q^ + п4^ ;
499
где в отличие от (80) верхний индекс г при qrk, к=1,2, обо-
значает показатель степени, к ~ номер координаты собст-
венного вектора;
wy=(q’)TRy; R/=||^.
.7=1,3; flj=(q')4 ; SJ=L'y
/ = 1,4-
Таким образом, канонический вид отображения описы-
вается уравнением, аналогичным (103),
Z = Хг + М(г)+ 7V(z) + ..., (121)
где однородные многочлены
2
Л/(г)= £mj+1z2"7z*7;
7° (122)
;=о
Второе уравнение получается из (121) комплексным сопря-
жением.
Из (91) вытекают следующие условия резонанса для од-
нородного многочлена второй степени:
9 2
к = X2; X = XX*; X = X* ,
остальные три условия совпадают с этими, поскольку получа-
ются из них комплексным сопряжением. При комплексном X
произведение XX* — вещественное число, поэтому второе усло-
вие никоща не выполняется.
На границе устойчивости Х = е70, поэтому условия ре-
зонанса второго порядка имеют вид
eje = 1; eJ3e =1, (123)
т.е. 6=0, 0=2л/3. Эти случаи являются особыми и далее не
будут рассматриваться.
В общем случае условие резонанса для отображения при
изучении бифуркаций, связанных с выходом из единичного
500
круга пары комплексно-сопряженных собственных значе-
ний, имеет вид
А. = Хт'Х*'"2,
откуда при X = eje получим
e>('ni-'n2-,)e = Xj (124)
или
cos (mt - т2 -1)6 + j sin (/«j - т2 -1)6 = I.
При 0, несоизмеримом с кп, где к — целое число, уравне-
ние (124) не имеет других решений кроме т.е. урав-
нение выполняется только для точек m=(/n1,m2) с целочислен-
ными координатами, лежащих на прямой wi-w2=l. Следова-
тельно, резонансным является моном третьей степени z2z*.
В других случаях, кроме /игт2=1, из уравнения (124) следует
(т 1 - т2 -1) 6 — 2 кп.
Отсюда при 6*0, 6*я найдем, что решение возможно в слу-
чае, когда 0=2Лл/г и имеет вид
тх-тг=\+г, г=±3, +4, ... (125)
Резонансные показатели степени m лежат на прямых:
L+i:mI-m2=l; Ь+3.тх-т2=4-,
L_3.m\-m2=-2’, L+^.mr-m2=5\
L_/l:ml-m2=-3 и т.д.
(рис. 10.13).
Таким образом, нормаль-
ная форма отображения при
«г1-т2=1 имеет вид
z=’kz+N2z2z,+Q3z3z*1+..., (126)
где переменные обозначены
так же, как и в исходном отображении (121), хотя они ме-
няются при заменах, выполняемых при получении нормаль-
ной формы.
501
Если дополнительно хотим исследовать случай г = |3|,
0 = + 2л/3, тх - пг2 = 4 и т1 - т2 = - 2, то добавляются соот-
ветствующие резонансные мономы:
z = 'k.z + MjZ*1 +N2z2z* +PiZ4 +P4ZZ*3 + Q3z3z*2 +... (127)
Аналогично при г = |4|, 0 = л/2 к нормальной форме
(126) необходимо добавить мономы
Q4zz*\ Q6z*5,...
При г=|3|, г = |4| добавляемые резонансные члены су-
щественны, при |г| >5 их можно не учитывать при рассмот-
рении основного случая (126) [78].
Рассмотрение частных случаев 0 = тт/2 и 0 = 2л/3 необходимо
при наличии запаздывания модулируемого фронта импульса,
когда при соответствующих углах 0 годограф собственных зна-
чений матрицы Якоби может пересечь единичную окружность.
3. Практический способ вычисления коэффициентов нор-
мализующего преобразования и нормальной формы.
В.М. Старжинским применительно к дифференциаль-
ным уравнениям предложен практический способ вычисле-
ния нормальной формы, при котором одной заменой унич-
тожаются все лишние мономы разных степеней и приведены
общие формулы для искомых коэффициентов [79].
Рассмотрим отображение (103), ее нормальную форму
(114), которую запишем в виде
Z = Az+1)32^2 +'»4^2 +•••> (128)
и нормализующее преобразование
у = z +mzi2 +P2Z1Z2 +P3Z2 +V1Z1 +V2Z1Z2, (129)
векторные коэффициенты которых и,- подлежат определению.
Выражение для у, задающее нормализующее преобразо-
вание (129), подставим в исходное уравнение канонического
502
вида (103), а нормальную форму (128) — вместо г. Тогда по-
лучим равенство:
Az+V3ZiZ2 +V4Z2 +Н1(М1 +43^2 +U14Z2)2 +
+ Из(^1^1 + и13^1^2 + и14^2 )(^2Z2 +и23^1^2 + и24^2) +
+ Нз(^2 + «23*1*2 + «24*2 У +®l(kl*l + «13*1*2 + «14*2 У +
+«2(^1*! + «13*1*2 + «14*2У(^2*2 + «23*1*2 + «24*г)+ ••• “
( 2 1
+м.
V 7=° 7=° 7
f 2 I A2
+ Mi zi + £niy+iZi2'7^ + Yvu^zi~Jz2
I 2=0
2
Zi + X^v+izi
J=0
2
+ N3 Zl
7=0
2
x,
J=0
2
b
7=0
( 1
2 j
1 42
2-j J
1 *2
х2
j=o ;
2
7 4- Vn 72~k7k 4-
^2 + 2-i ^24+1^1 Zi +-
A=0
' 2
N1 Zt + X^U+l^~Jz2
I 2=0
' 2
Z2 + i^2k+lZl'kZ^ + .. +
ч *=o 7
2 A2
+ ... Z2 + ^И2Л+1*2 **2 + —
k=0
V
(130)
2
9
7=0
Приравнивая однородные многочлены второй степени,
входящие в левую и правую части этого равенства, приходим
к тождеству:
2 2
НЛ21*12 +H2^A2Z1^2 +Н3^2 - лХ|1Л14~7^ +ХМЛ^1~^2 ,
7=о 7=0
503
откуда получаем уравнения для определения векторных ко-
эффициентов j = 1,3:
НИ| =Лр1 + М1,
=Ap,2+M2j (131)
ji3X22 =Лц3 + М3.
Из (131) находим:
14= (^1 -a)T1Mi; ц2= (Х1Х21-л)~1М2;
/ VI (132)
ц3= (х21 - Л) М3.
Теперь, приравнивая однородные многочлены третьей
степени слева и справа равенства (130), получаем тождество:
I
O3Z1Z2 +V4Z2 +D2^^2^12Z2 =Л^1) j^-Jz{ +
J 0
2 ( 2 .2 A
+ 2Mj+ M2 Xni;+]Zi2“yzf1 + X^-k+lzl~kZ2 +
7=0 (7=0 k-0 )
2 3
+ 2M3 Y^2J+1Zi~JZJ2+1 + XNblZl’M-
2=0 k=0
откуда следуют уравнения для определения d у, j = 1,4:
DjXj —Auj +
=At)2+ 2M]Pj2 + М2(цп + M22) + 2 M3p2j + N2;
v3= 2MiPi3 + M2(pi2 + Р2з)+ 2M3p’22 + N3;
Т>4= М2Р1з + 2М3Ц23 + N4.
Получаем:
t>i=(x3j1-a) (2ццМ1 + P2iM2 + Nj);
v2~ 64^2! -a)T [2pi2Mi + (цп + p22)M2 + 2^21^3 + N2];
г3= 2Ц13МЗ + (p12 + Р2з)-^2 + 2^22^3 + N3 j (133)
'u4= Ц13М2 + 2Ц23М3 + N4.
Таким образом, коэффициенты (132) при мономах второй
степени нормализующего преобразования (129) совпали с
504
ранее найденными величинами (108), а коэффициенты при мо-
номах третьей степени »(, 1)2, определяемые первыми двумя фор-
мулами (133), отличаются от (113) наличием в правой части сла-
гаемых, зависящих от коэффициентов Му-, j = 1,3. Последние две
формулы (133) дают коэффициенты нормальной формы (128).
Отметим, что в данном случае в отличие от работы [79] ко-
эффициенты нормализующего преобразования и нормальной
формы определялись без предварительного симметрирования
исходного отображения канонического вида (103). Симметри-
рование в работе В.М. Старжинского потребовалось для полу-
чения общих формул для отображения любого порядка.
10.6. Особые режимы работы
повышающего импульсного преобразователя
В последнее время повысился интерес к повышающему
преобразователю (рис.2.1,о), в частности, в связи с его приме-
нением в корректорах коэффициента мощности цепей элек-
тропитания современной радиоэлектронной аппаратуры. Одна-
ко динамические режимы повышающего преобразователя в ли-
тературе исследованы недостаточно. Представляет теоретический
интерес то, что нарушение устойчивости простой неподвижной
точки отображения повышающего ППН, как и у инвертирую-
щего, происходит за счет выхода из единичного круга пары
комплексных собственных значений матрицы Якоби. Это при-
водит к существенным особенностям динамики такого ППН.
Разложение в ряд Тейлора отображения последования
повышающего преобразователя
Силовая часть повышающего ППН в режиме непрерыв-
ного тока дросселя описывается разностным уравнением
(2.25), которое перепишем в виде
х = Аэх + Вэу, (134)
где
A3=A('tn-'to)H('to); Вэ=А(гп-г0)В(г0)+В(гп-г0); (135>
505
матрицы А(т) и В(т), как и в понижающем ППН, определяют-
ся формулами (1.41) - (1.43), а матрицы Н(т) и R(t) — форму-
лами (2.18) и (2.19).
Длительность включенного состояния регулирующего
транзистора то=т]-т31+т32 зависит от схемы управления. В
случае схемы с отрицательными обратными связями по вы-
ходному напряжению и току дросселя время tj вычисляется
из уравнения, получающегося из (8.71) при замене матриц
А(т), В(т) соответственно на Н(т), R(t):
-1—/Г0м-7^стН(г1 -Ь1)х- -1- ctR(ti -t31)v = 0,(136)
тп <4 *4
где с=||с1,с2|т; с,=-^пАОт; с2=-6/пА0.
Из (134) находим матрицу Якоби отображения
С = f'(xy) = Аэ + (137)
ат0 ах ат0 ах
где при записи уравнения (136) в виде
Ф(х,т1)=0
остается справедливым равенство (50) и имеем
5ф_рФ Зф || 1 , ,
При определении производных матриц Н(т), R(r) по
времени т учтем их общие выражения
Н(т) = еА«т; R(t)= (еАвТ-1)(Ац)'вн,
где матрицы параметров А'н и Вн даются формулами (2.15) и
(2.16). Тогда к-е производные:
- (а; )* Н (,) = Н (т)(а; )*;
= (a'J-'hWB,, « H(z)(A'J-‘b„,
где /с>1; (aJ° =1.
506
Из (136) с учетом (138) найдем
-t3,)(a’hx + Bhv). (139)
ат0 ат, тп ип
Второй дифференциал отображения получается аналогично
(56) дифференцированием первого дифференциала (137):
откуда с учетом (54), (55) найдем
l \ Гd2A3 </2Вэ ^ff/тр, ^7с?Т(),
Г<2>(х„)(Ь„Ь2) = -^h, —°Ь2 +
Jtq azG J
(140)
Аналогично определяется третий дифференциал отображения (134)
f(3)(xAr)(h1,h2,h3) = [f(2) (хЛ )(h,, h2 )]h3
CIa.
fd3A3 d3B3 ^Afdto.
= —r* +——V I -ЛЬ.- +
k dt0 dr0 J ,=i k dx J x=Xf/
J2A3
. dr20
4М^ФТ2Ьз 4^ФТ2Ьз +
d-1% )[{ax ) {dx J
-J jT°h
+ Jx h3
h{T2h2
h.
dr20 L
—°h L
dx ”3 +
+hJ^b,
dx
Л"Ь,
dx
+ ь3|-“Ль
*«h
rfx 2
+
X = XJV
f dx0 h
1 лЛ
2
+ ^5-[h,(h^T2h3)+h2(h[T2h3)+h3(hfT2h2)]+
GT0
v “T0 “T0 J
(141)
507
где использованы обозначения (55), (58).
С учетом выражений (135), (59) и (138) найдем произ-
водные матриц Аэ и Вэ по времени т0:
^ = А(тп-т0)(А'н-Ав)н(т0);
= А (тп - т0)ГА2 - 2АНAB + (А' У1Н (г0);
Ло L J
^=А(тп-г0)Г-А3н+ЗА2йА'н-ЗАн(А'н)2+(А'н)3]н(г0);
dxo L J (142)
^ = А(гп-г0){[н(г0)-1]В„-АнК(г0)};
ат о
^ = А(тп-т0){А2К(г0)+[(А'н-2Ан)н(-г0)+Ад]в„};
= А(тп -т0)|-А3 R(x0) +
(зА2 +(Ab? -ЗАнАЙн(т0)-А2 Вн
I г! \ И / ii n I \ \) J Jti гх
В данном случае остаются справедливыми формулы (60) - (62),
(65) для определения частных производных, входящих в выра-
жения (55) и (58).
Остается в силе каноническая форма отображения по-
следования, задаваемая равенствами (118)- (120) или (121),
(122), в которые необходимо подставлять иные, чем в случае
понижающего ППН, коэффициенты пу, tij. Нормальные
формы будут иметь уже рассмотренный вид (126), (127).
Исследование основного случая бифуркаций
периодических движений
Этому случаю соответствует нормальная форма (126). Пе-
рейдя в ней к полярным координатам (р,<р) с помощью замен
Z = pej<s>, z* = pe J<>,
508
получим:
pej* = (кр + N2p3 + е3Р5)еУф + - - (143)
Умножая это уравнение на комплексно-сопряженное, на-
ходим отображение, не зависящее от угловой координаты <р:
р2 = (^Р + ^2р3 + ОзР5)(^ Р + ^2Р3 + СзР5)+ • =
= |Х|2р2 +ар4 +o^|p|6J , (144)
где а = XN2 + Л* N2 = 2 Re (х* N2). Таким образом, переменная р с
точностью до несущественных членов ряда отделилась. По-
скольку р2 представляет собой квадрат модуля «старой» пере-
менной z, уравнения такого вида называются амплитудными.
Умножая уравнение (143) на е“7ф, комплексно-
сопряженное на еЛ>, и вычитая, находим соотношение:
psin(<p-<p) = (ImX)p + (ImTV2)p3 +..., (145)
откуда исключая р с помощью (144) можно получить зави-
симость <р от р и <р.
Отображение (144) может иметь неподвижные точки
РЛГ1 =0; Pw2 =1 I---» (146)
1 2 а
где X и а зависят от параметров. При бифуркационном зна-
чении параметра |Х| = 1, и обе неподвижные точки сливают-
ся. Возможны два вида графиков функции последования
(144) вблизи точки р2=0 (рис. 10.14) и зависимостей непод-
вижных точек от параметра ц (рис.10.15,о и б).
Если о<0 (рис. 10.14,о) и при ц<цкр=0 |Х|<1, то левее
бифуркационного значения параметра цкр=0 существует
только одна устойчивая простая неподвижная точка pw, -0
(второе решение (146) не имеет смысла, поскольку р^ не
может быть отрицательным) (рис. 10.15,о). Справа от бифур-
кационного значения параметра ц>ркр, |Х|>1, появляется
509
второе решение (146), что означает рождение на комплекс-
ной плоскости устойчивого движения по окружности радиу-
са р д’. В координатах xj, х2 при этом появляется движение дис-
кретной системы по некоторой замкнутой инвариантной кривой.
На рис. 10.15 устойчивые неподвижные точки обозначены кру-
жочками, неустойчивые — крестиками.
Если а>0 (рис.10.14,б) и при ц<цкр=0 |Х|<1, то левее
бифуркационного значения параметра цкр существуют две
неподвижные точки (146), одна из которых (рд=0) устойчи-
ва, другая — нет (рис. 10.15,6). Правее критической точки
ц>цкр |Х|> 1, и существует только одна неустойчивая непод-
вижная точка рдг=0.
Согласно [49] при бифуркации рассматриваемого типа
нарушение устойчивости простой неподвижной точки приводит
либо к отделению от нее устойчивой замкнутой инвариантной
510
кривой, соответствующей точке р^2 на рис. 10.14,а, либо к
тому, что с ней сливается неустойчивая замкнутая инвари-
антная кривая, соответствующая точке р^2 на рис. 10.14,6.
Бифуркация при этом «мягкая».
Отображение ф=/(ф), задаваемое формулой (145), мож-
но преобразовать в отображение окружности в окружность
Ф = Ф + 2тио,
(147)
график которого представлен на рис. 10.16. Как известно, при
иррациональном о отображение
(147) не имеет периодических точек;
если у отображения (147) есть перио-
дические точки, то со рационально,
со = p/q,
где р и q — взаимно простые числа.
При иррациональном со последова-
тельности точек ф всюду плотно по-
крывают окружность 0<ф<2л [78]. Сколь угодно малые из-
менения X и р2 могут привести к качественным изменениям
отображения (147), которые соответствуют появлению мно-
гократных неподвижных точек.
Частные случаи бифуркаций периодических движений
Рассмотрение особых случаев бифуркаций периодиче-
ских движений (0=л/2, 0=2л/3) продолжается до настоя-
щего времени, несмотря на значительное число работ разных
исследователей [48, 68]. Это объясняется невозможностью
чисто аналитического исследования, большим разнообразием
и сложностью фазовых портретов, возникающих при пересе-
чении бифуркационных границ с 0 = п/2 и 0 = 2л/3. В зави-
симости от значений параметров здесь могут представиться
случаи рождения как замкнутых инвариантных кривых, так и
511
периодических движений седлового типа, а также случаи,
когда рождаются устойчивые периодические движения учет-
веренного и утроенного периода [78]. Эти особые бифуркации
могут приводить к возникновению хаотических движений.
Рассмотрим качественные изменения периодических
движений при е = тс/2. В этом случае уравнение резонанса
(124) имеет решение/и|-/И2=1гДе И = 4, 6 = 2ктг/г=± л/2,
а к нормальной форме (126) добавляются мономы
N^Z*3, QtZz'4, Q^Z*5 и др. Ограничиваясь членами ряда не
выше третьего порядка малости и считая коэффициенты TV2
и TV4 определенными, запишем нормальную форму в виде
Z = Xz + N2z2Z* + N4Z*3 + o(|z|S). (148)
Переходя в (148) к полярным координатам (р,ср), находим:
Р2 = Н|2Р2 +ар4 +*(ф)р4 +о(|р|6), (149)
р sin (ср - <р) = (ImX)p + [lmpV2 + ^4е“74ф)]р3 , (150)
где а = 2Re(y2X*), ^(<р) = 2Re (лГ4?1*е~74ф). Отсюда видно, что
в данном случае переход к полярным координатам не приво-
дит к выделению одномерного отображения, как было в ос-
новном случае.
Для исследования колебаний на кратных частотах использу-
ются соответствующие степени отображения (148). Например,
вторая степень отображения определяется таким образом:
г(2) = й + N2z2z + W4r3 +... = фг + N1Z2Z* + TV4z’3)+
+ N^kz + N2z2z* + N4Z*3)\k*z* + N2z*2z + ^z3) +
+ N^z* + N2z*2z + +... = Х2г + x(l + |X|2)tv2^2^* +
+ (^ + r3)TV4z*3 + ...;
третья степень:
512
Z® = A?z + (a. +A?A* ]NzZ2Z* + (a. +A*3jy4z*3 + -.. =
=a2 (>.z+N2z2z*+ N4z*3 )+ (a+A2A* )y2(Az+^1Z2Z*+ - -)3 (a* z*+ —)+
+ (a.+x3 j/V4 (a z
четвертая степень:
Рассмотрим подробнее четвертую степень отображения
(151). В полярных координатах (р,ф) аналогично (149) найдем:
ре7ф = (а.4р + Z,W2p3 + l2N^e~j^)ej,f + ...,
ре’7ф = (х*4р + {*N*p3 + /*^рЗе;4ф)е-Уф + ,
р2 = | А4|2Р2 + 2[Re(/^2 + /2^4”)Х-4]Р4 + ..., (152)
psin(q> - ф) = (im А.4)р + [imfZjTVj + /2Л4е--/4ф)]р3 + ....
Отображение, задаваемое уравнениями (152), кроме непод-
вижной точки р=0 типа фокуса, устойчивой при |Х| <1 и не-
устойчивой при |А.|>1, может иметь еще неподвижные точ-
ки, определяемые из уравнений
|а.4|2 + 2[Re(/^2 + l2N4e-^)r4]p2 +... = 1, (15з)
ImA.4 + Im(/^2 + /27V4e-j'4'l>)p2 +.... = 0 .
513
Приняв для упрощения, что
| X | = 1 + ctp +..., arg X — — + Pp +...,
где ц — малый параметр, получим:
X4 = (1 + 4сщ)е'4(л/2+₽м) + ..., X*4 = (1 + 4ощ)е-'4(,1/2+₽^ + ...,
| X41 =1 + 8ац + ...,
1птХ4 = (1 + 4ap)sin 4 (я/2 + Рц) +... = 4Рц + ....
Тогда уравнения (153) принимают вид:
4аИ + Re^2 + /2У4е^4<”)р2 +... = О, (jM)
4рц + Im(/^2 + /2^4е‘у4ф)р2 +... = О,
откуда
+ /2ЛГ4е--/'4ф « -4цр~2(а + /р). (155)
Левая часть уравнения (155) на плоскости р,<р представ-
1
I
I
I
I
I
I
I
I
I
I
I
ляет собой окружность с центром в точке 1{N2 и радиусом
| /2МI, правая — линию, близкую к по-
лупрямой (рис. 10.17). Эти линии могут
не пересекаться, пересекаться в одной
или двух точках [49].
Записав равенства (154) в виде
4ац + р2 Re (1^2) - -р2 Re(z27V4e"-,4<i’),
4рц + р2 Im (llN2) = -р2 1т(г2Л4е-'4ф),
возведя в квадрат и сложив, получим уравнение относительно р2:
(м2 -М4|2)р4 + 8pp2[aRe(Z1JV2)+pIm(^2)] +
+ 16ц2(а2 +р2)=0. (156)
Отсюда
р2 = _ 4ц [a Re (/1#2) +plm(/,^)| ±
______\W2-\W2
±4gJ[aRe(/,^)+plm(/17V2)]2 -(а2 +р2)(|/,У2|2 -|/2ТУ4|2)
I^Nwi2
514
Уравнение (156) не имеет действительных корней при
выполнении неравенств
|/^2|2 -|^4i2 >0, ц[аRe(/]2V2) + plm(l^2)]> 0 (157)
или неравенства
[aRe №2)+ р Im(ZjN2)f- (а2+р2| lxN2|2-| Z2TV412J<0. (158)
При выполнении неравенства, обратного (158), и неравенств
|ЛЛ<2|2 - |/2TV4|2 > 0, M[aRe(/I^2) + plm(/IJV2)]<0
имеются два корня, а в случае выполнения неравенства, об-
ратного (158), и неравенства
|Zi7V2|2-|Z2ZV4|2<0
— один корень.
Каждому корню уравнения (156) соответствуют четыре не-
подвижные точки со значениями <р, определяемыми из уравнения
(155). Возможные при этом фазовые портреты рассмотрены в [49].
Численное исследование колебаний
в повышающем преобразователе
Далее приводятся результаты, полученные Г.В. Малининым,
для Со~5; tf=g6=0,2; 4LCIT=5\ и=2\ ирЧ; v2=0; Ymax=0>8-
Программный комплекс имеет следующую структуру:
1) расчет однократных неподвижных точек отображения
по нелинейной модели;
2) расчет частных производных времени tq по координа-
там вектора состояния х по приведенным ранее аналитиче-
ским выражениям;
3) определение собственных значений матрицы Якоби
отображения, правых и левых собственных векторов;
4) расчет коэффициентов ряда Тейлора отображения;
5) определение коэффициентов нормализующего преоб-
разования и нормальной формы отображения;
6) определение неподвижной точки отображения (144)
по формуле (146); определение комплексных переменных
г = ре-/ф, z* =ре 79 при изменении <р в пределах 0 < <р < 2л;
515
7) определение координат вектора у канонической фор-
мы отображения, для чего используется нормализующее
преобразование (129), которое в случае комплексных собст-
венных значений матрицы Якоби записывается в виде
y = z + fliZ2 + H2ZZ* + ll3Z*2 + VlZ3 + V2Z2Z*,
где z=||z,z‘|T, а отображение канонического вида задается
формулой (103), где Л — диагональная матрица; по формуле
(117) вычисляется приращение h=yq+y*q* исходного вектора
состояния X=XAi+h.
Расчетные бифуркационные диаграммы как функции
параметров Л.Ко=Ко-Кокр, АХог=Аог-АоТ1ф при указанных выше
значениях остальных параметров представлены на рис. 10.18,а и
б, причем кривые на рис. 10.18,а соответствуют: 1 — Аог=1,
ЛЬкр=12,9549; 2 - /^=1,5, ^=19,0712; 3 - А^=2,
Локр=25,1879; кривые на рис.10.18,б — 1 — Ло=15, Лоткр=1,1672;
2 - АЬ=20, ^=1,5759; 3 - ^=25, ^=1,9846.
Характер бифуркаций на рис. 10.18 такой же, как на
рис. 10.14,а. Общим для этих кривых является увеличение ра-
диуса инвариантной окружности р при удалении от критиче-
ского значения параметра в сторону, соответствующую росту
516
|А|. Однако при большом удалении от критического значе-
ния параметра представление отображения последования
усеченным рядом может давать значительную погрешность.
На рис. 10.19 представлены расчетные замкнутые инва-
риантные кривые отображения, соответствующие А^т— 1 (о) и
А^т=2 (6), а на рис. 10.20 - для АЬ=20 (а) и Ао=25 (6). Там же
приведены дискретные точки, взятые в последние 300 пе-
риодов переходного процесса в точной динамической моде-
ли, продолжавшегося 30 тыс. периодов. Как видно,
при ЛЗ=13,О и АЬкР=12,9549 (рис.10.19,«) результаты точных
расчетов уже имеют заметное отклонение от приближенной
инвариантной кривой, а при ^=1,572 и Лоткр=1,5759
(рис. 10.20,с) — значительное отклонение. Система более чув-
ствительна к изменению коэффициента чем Kq.
517
Сравнение результатов приближенных и точных расчетов
показывает, что замена точной нелинейной модели импульс-
ного преобразователя нормальной формой усеченного ряда
Тейлора отображения последования в некоторой окрестности
бифуркационного значения параметра дает удовлетворитель-
и позволяет делать правиль-
ные количественные результаты
ные выводы о качествен-
ной перестройке системы.
На рис. 10.21 представ-
лены временные диаграм-
мы координат вектора со-
стояния Xi, Х2 в устано-
вившемся режиме при ука-
занных значениях парамет-
ров и jKoj.=1, ^0=12,96 (за
счет большого числа дис-
кретных точек последние
слились в сплошные ли-
нии). То же множество то-
чек показано на плоскости
xb xi, стрелками отмечены последовательные переходы от
точки к точке в рассматриваемом процессе.
Процессы, представленные на рис. 10.19 и 10.20, рассчи-
таны по точной нелинейной модели при начальных услови-
ях, очень близких к неустойчивой неподвижной точке хдг. С
удалением от бифуркационной границы 7У(р (при увеличении
Ао или уменьшении Лф) в системе наблюдались хаотические
колебания. Новые бифуркации наблюдались при достаточно
малых отклонениях коэффициентов усиления от критиче-
ских значений. Например, когда Аф=1, переход к хаосу про-
исходит при Ао=13,О1, что соответствует отклонению коэф-
фициента Ло от критического всего на 0,42%, когда Аф=1,5
— при ^0=19,14 (0,36%), когда Аф=2 — при ^=25,25 (0,25%).
Это свидетельствует о малости областей притяжения наблюдае-
мых процессов. На рис. 10.22 представлены последние 300 из
518
наблюдавшихся 30 тыс. периодов процесса во времени и на
плоскости Xi, Х2 при
АЬТ—1 и А'о=13,1. На-
блюдаемый процесс
характеризуется соче-
танием периодов рабо-
ты, когда регулирую-
щий транзистор от-
крывается на макси-
мальное время или во-
все не открывается.
Появление хаоса
можно объяснить
следующим образом.
Установившееся дви-
*2
1,41j;
0 2 4 JCj
Рис. 10.22
жение Г имеет область притяжения П(Г), внутри которой
находится движение Г. При непрерывном изменении пара-
метра ц меняется как установившееся движение, так и его
область притяжения П(Г).
При бифуркационном зна-
чении параметра цкр любая
достаточно малая а-окрест-
ность Г отображением пре-
образуется в область, у кото-
рой имеются точки, лежа-
щие вне этой a-окрестности.
В этом случае прежнее уста-
новившееся движение Г те-
ряет устойчивость и исчеза-
ет, а фазовые точки из его
окрестности с ростом време-
ни переходят в область при-
тяжения хаотического движения, которая существовала и до
рассматриваемой бифуркации установившегося движения.
519
Однако область хаоса не сплошная. С увеличением коэффи-
циента усиления Kq наблюдались также периодические дви-
жения. Например, при Кот=1, Ао=13,7 наблюдалось движе-
ние с периодом 19Т(рис.10.23).
Особые случаи бифуркаций (<р = л/2, <р = Зл/2), хотя тео-
ретически возможны, но на
*2
1,7430
1,7425
1,7420
3,056 3,064 3,072 *1
Рис. 10.24
практике наблюдаются редко.
Бифуркация, связанная с пе-
реходом через границу ЛГя/2,
наблюдалась при 7^=5,09338
и Локр-63,03252. В этом случае
наблюдался периодический
процесс учетверенного перио-
да 4Т. На рис. 10.24 темные
кружочки представляют собой
четырехкратные неподвижные
точки, рассчитанные по точной нелинейной модели (взяты
последние из 30 тыс. точек переходного процесса), светлые
кружочки получены по упрощенной формуле (155).
Заключение
Автор стремился подробно изложить современные мето-
ды расчета и анализа динамических режимов и характери-
стик импульсных преобразователей. Как и после большинст-
ва исследований, решение одних задач ставит перед исследо-
вателями не меньше новых. Поэтому не может быть полного
удовлетворения от проделанной работы.
Исходным пунктом выполненных исследований явилась
матричная запись дифференциальных уравнений импульс-
ных преобразователей, в результате чего, несмотря на невы-
сокий их порядок, благодаря свойствам переходных матриц
удается существенно уменьшить объем математических пре-
образований и получить общие методы анализа и расчета.
Другим отличительным моментом работы является учет всех
основных нелинейностей импульсных преобразователей, к ко-
торым относятся: нелинейная зависимость длительности вклю-
ченного состояния регулирующего транзистора, определяемой
520
из нелинейного уравнения, от управляющего сигнала, огра-
ничение длительности включенного состояния регулирую-
щего транзистора, возможность перехода из режима непре-
рывного тока дросселя фильтра в режим прерывистого тока;
ограничения в схеме управления и другие. Это не вызывает
принципиальных усложнений алгоритмов расчета при ис-
пользовании современной вычислительной техники
Следующая особенность состоит в том, что программы
анализа и расчета импульсных преобразователей строятся не
на основе численных расчетов по исходным дифференци-
альным уравнениям, а с использованием отображения по-
следования, получаемого после ряда аналитических преобра-
зований исходных уравнений. Это позволило разработать бо-
лее эффективные программы анализа и расчета особых ре-
жимов работы импульсных преобразователей.
Новые методы не исключают ранее разработанные мето-
ды исследования с помощью линейных импульсных моде-
лей, а обобщают и уточняют их.
В результате разработки динамических моделей и обосно-
вания метода усреднения для расчета статических характери-
стик силовой части в первых трёх главах выявляется необходи-
мость дальнейшей проработки возможности использования ме-
тода усреднения при расчетах динамики преобразователей с
замкнутыми системами управления. Требуется провести допол-
нительные исследования для обоснования возможностей мето-
да разделения движений при решении задач анализа и динами-
ческого синтеза импульсных преобразователей.
Необходимо продолжить исследования влияния входного
£С-фильтра на динамические характеристики импульсных
преобразователей, в частности, с использованием предло-
женной в работе импульсной модели.
Предстоят большие работы по разработке и исследованию
цифровых систем управления импульсными преобразователя-
ми, в том числе по разработке методов оптимального синтеза,
особенно много нерешенных проблем имеется в области каче-
ственных методов исследования импульсных преобразователей.
521
СПИСОК ЛИТЕРАТУРЫ
1. Белов Г.А. Полупроводниковые импульсные преобразователи
постоянного напряжения: Учеб, пособие. — Чебоксары: Изд-во Чуваш,
ун-та, 1994. — 96 с.
2. Белов Г.А. Развитие теории и разработка импульсных полу-
проводниковых преобразователей постоянного напряжения: Автореф.
дис. д-ра техн, наук/ Моск, энерг. ин-т. — М., 1991. — 48 с.
3. Ройтенберг Я. Н. Автоматическое управление: Учеб, пособие. —
М.: Наука, 1978. - 552 с.
4. Куо Б. Теория и проектирование цифровых систем управле-
ния. —М.: Машиностроение, 1986. — 448 с
5. Геращенко Е.И., Геращенко С.М. Метод разделения движений
и оптимизация нелинейных систем. —М.: Наука, 1975. — 296 с.
6. Коссов О.А. Усилители мощности на транзисторах в режиме
переключений. —М.: Энергия, 1971. — 492 с
7. А.с №875361 СССР. Импульсный стабилизатор/ Г.А. Белов,
А.М. Иванов. — Открытия. Изобретения. 1981. .№39.
8. Конев Ю.И. Транзисторные импульсные устройства управле-
ния электродвигателями и электромагнитными механизмами. — М.:
Энергия, 1964. — 120 с.
9. Поликарпов А.Г., Сергиенко Е.Ф Однотактные преобразова-
тели напряжения в устройствах электропитания РЭА. — М.: Радио и
связь, 1989. — 160 с.
10. Ланкастер П. Теория матриц: Пер. с англ — М.: Наука, 1978. - 280 с.
11. Слепов Н.И., Дроздов Б.В. Широтно-импульсная модуляция. —
М.: Энергия, 1978. — 192 с.
12. Белов Г.А. Сигналы и их обработка в электронных устройствах:
Учеб, пособие для вузов. — Чебоксары: Изд во Чуваш, ун-та, 1996. — 376 с.
13. Цыпкин Я. 3. Релейные автоматические системы. — М.: Наука,
1974. - 576 с.
14. Сазонов В.В. Компенсационно-параметрические импульсные ста-
билизаторы постоянного напряжения. — М.: Энергоатомиздат, 1982. — 88 с.
15 Бас А.А., Миловзоров В.П., Мусолив А.К. Источники вторич-
ного электропитания с бестрансформаторным входом. — М.: Радио и
связь, 1987. — 160 с.
16. Поздеев А.Д., Никитин В.М., Пименов В.М. Динамическая
модель для малых отклонений систем с двусторонней широтно-
импульсной модуляцией// Электричество. 1981. №9. С. 66—68.
17. Шипилло В.П., Чикотило И.И. Устойчивость замкнутой сис-
темы с тиристорным широтно-импульсным преобразователем в режиме
прерывистого тока// Электричество. 1980. №12. С. 52-56
18. Белов Г.А Высокочастотные тиристорно-транзисторные преобра-
зователи постоянного напряжения. — М.: Энергоатомиздат, 1987. — 120 с.
19. Управляемый выпрямитель в системах автоматического управ-
ления/ Под ред. А.Д. Поздеева — М.: Энергоатомиздат, 1984 — 352 с.
20. Yu Y., Lee F.C., Kolecki J. Modeling and analysis of power proc-
essing systems// IEEE PESC Record, 1979 P. 11-24.
522
21. Lee F.C. Yu Y., Triner J.E. Modeling of switching regulator power
stages with and without zero-inductor-current dwell time// IEEE PESC Re-
cord, 1976. P. 62-72.
22. Kelnar S.S., Lee F.C. A novel input filter compensation scheme for
switching regulators// IEEE PESC Record, 1982. P. 260-271.
23. Белов Г.А., Кузьмин C.A. Динамическая модель и устойчи-
вость импульсного стабилизатора с асинхронным интегральным
ШИМ// Техническая электродинамика. 1989. №4. С. 58 -64.
24. Трахтенберг Р.М. Импульсные астатические системы электро-
привода с дискретным управлением. — М.: Энергоиздат, 1982. — 168 с.
25. Белов Г.А. Расчетные модели и анализ устойчивости импульс-
ных стабилизаторов напряжения с частотно-фазовым управлением//
Электронная техника в автоматике/ Под ред. Ю.И. Конева. — М.: Радио
и связь, 1982. Вып.13. С. 43—54.
26. Белов Г.А Расчетные модели преобразователей постоянного
напряжения с частотно-фазовым управлением// Электричество. 1985.
№10. С. 27-32.
27. Зельдин Е.А Цифровые интегральные микросхемы в инфор-
мационно-измерительной аппаратуре. — Л.: Энергоатомиздат: Ленингр.
отд-ние, 1986. - 280 с.
28. Белов Г.А, Мочалов М.Ю. Цифровая астатическая система
управления ИСН// Вести. Чуваш, ун-та, 1996. №1. С. 67—76.
29. Иванов В.А., Ющенко А.С. Теория дискретных систем автома-
тического управления. — М.: Наука, 1983. — 336 с.
30. Ломака М.В., Медведев И.В. Построение эквивалентной моде-
ли дискретной системы с несколькими импульсными элементами//
Изв. АН СССР. Техническая кибернетика. 1987. №4. С. 169—177.
31. Бссекерский В.А. Цифровые автоматические системы. — М.;
Наука, 1976. — 576 с.
32. Расчет автоматических систем/ АВ. Фатеев, АА. Вавилов,
Л.П. Смольников и др.; Под ред. А.В. Фатеева. - М.: Высш, шк., 1973. - 336 с.
33. Цыпкин Я.З. Основы теории автоматических систем. — М.: Нау-
ка, 1977. — 560 с.
34. Цыпкин Я.З. Теория линейных импульсных систем. - М.:
Физматгиз, 1963. — 968 с.
35. Гладышев С.П., Чугаев В. В. Динамические свойства широтно-
импульсных систем с линейной непрерывной частью второго поряд-
ка// Электротехника. 1981. №5. С. 40—42.
36. А.с. №1656508 (СССР). Способ управления импульсным ста-
билизатором постоянного напряжения/ Г.А. Белов, С.А. Кузьмин. —
Открытия. Изобретения. 1991. №22.
37. А.с. №265255 (СССР) Способ стабилизации выходного на-
пряжения вентильного преобразователя с широтно-импульсной моду-
ляцией/ Б.А. Лапин. — Открытия. Изобретения. 1979. №11.
38. Шипилло В.П., Левицкая Н.Д. Взаимодействие стабилизиро-
ванных полупроводниковых преобразователей с источниками питания
постоянного напряжения// Электротехника. 1989. №7. С. 41—45.
39. Шипилло В.П., Левицкая НД. Электромагнитная совместимость
стабилизированного выпрямителя с питающей сегью//Элек1ротехника,1989,№8.
523
40. Гладышев С.П. Расчет нелинейных систем на ЭВМ. — М.: Ма-
шиностроение, 1987. — 208 с.
41. Белов Г.А. Динамические модели инвертирующего импульс-
ного стабилизатора напряжения// Электричество. 1990. №4. С. 48—54
42. Беркович Е.И. Устойчивость в целом замкнутой системы регу-
лирования с широтно-импульсным преобразователем// Электричество.
1985. №7. С. 44-48.
43. Беркович Е.И. Устойчивость замкнутой системы автоматиче-
ского регулирования однофазного инвертора с самовозбуждением//
Электричество. 1990. №2. С.8-13.
44. Велмере Э.Э. Об абсолютной устойчивости широтно-импульсных
систем//Автоматика и телемеханика. 1971. №1. С. 175-178.
45. Попов Е.П. Теория нелинейных систем автоматического регу-
лирования и управления. — М.: Наука, 1979. — 256 с.
46. Воеводин В.В. Линейная алгебра. — М.: Наука, 1974. — 336 с.
47. Абгарян К.А. Матричное исчисление с приложениями в тео-
рии динамических систем. — М : Физматлит, 1994. — 544 с.
48. Неймарк Ю.И. Метод точечных отображений в теории нели-
нейных колебаний. — М.: Наука, 1972. — 471 с.
49. Неймарк Ю.И. Динамические системы и управляемые процес-
сы. - М.: Наука, 1978. — 336 с.
50. Бутенин Н.В., Неймарк Ю.И., Фуфаев НА Введение в теорию не-
линейных колебаний: Учеб, пособие для вузов. — М.: Наука, 1987. — 384 с.
51. Белов Г.А., Картузов А.В. Исследование колебаний импульс-
ного стабилизатора вблизи границы устойчивости// Техническая элек-
тродинамика. 1988. №2. С. 52-59.
52. Белов ГА, Картузов АВ. Колебания в импульсном стабилизато-
ре вблизи границы устойчивости// Электричество. 1988. №7. С. 53-56.
53. Точные методы исследования нелинейных систем автоматического
управления/ Под ред. РА Нелепина. — М.: Машиностроение, 1971. — 323 с.
54. Косякин А.А., Шамриков Б.М. Колебания в цифровых авто-
матических системах. — М.: Наука, 1983. — 336 с.
55. Букреев С.С. Силовые электронные устройства. — М.: Радио и
связь, 1982. — 256 с.
56. Мслешин В.И., Мосин В.В., Опадчий Ю.Ф Формирование ди-
намических свойств устройств вторичного электропитания с ШИМ-2//
Электронная техника в автоматике/ Под ред. Ю.И. Конева. — М.: Ра-
дио и связь, 1985. Вып.16. С. 5-44.
57. Бесекерский В.А., Попов Е.П. Теория систем автоматического
регулирования. — М.: Наука, 1966. — 992 с.
58. Николаев Ю.А, Петухов В.П., Феклисов Г.И., Чемоданов Б.К.
Динамика цифровых следящих систем/ Под ред. Б.К. Чемоданова. — М.:
Энергия, 1970. — 496 с.
59. Соломаха О.Н., Ядовина Е.С. Алгоритмический синтез регуля-
торов в импульсных стабилизаторах напряжения с комбинированным
управлением//Техническая электродинамика. 1989. №4. С. 37-45.
60. Мочалов М.Ю. Синтез оптимальных систем управления ИСН
на основе квадратичного критерия качества// Вестн. Чуваш, ун-та,
1997. №2. С. 99-107.
524
61. Белов Г.А. Исследование импульсного стабилизатора методом
точечных отображений// Проблемы преобразовательной техники/ Ин-т
электродинамики АН УССР. — Киев, 1983. 4.2. С. 115-118.
62. Белов Г.А. Исследования колебаний в импульсном стабилиза-
торе напряжения вблизи границы устойчивости// Электричество. 1990.
№9. С. 45-51.
63. Баушев В.С., Жусубалиев Ж.Т. О недетерминированных режи-
мах функционирования стабилизатора напряжения с широтно-
импульсным регулированием// Электричество. 1992. №8. С. 47-53.
64. Баушев В.С., Жусубалиев Ж.Т., Михальченко С.Г. Стохастич-
ность в динамике стабилизатора напряжения с широтно-импульсным
регулированием// Электричество. 1996. №3. С. 69-75.
65. Жусубалиев Ж.Т. К исследованию хаотических режимов пре-
образователя напряжения с широтно-импульсной модуляцией// Элек-
тричество. 1997. №6. С. 40-46.
66. Белов Г.А. Математические основы динамики нелинейных
дискретных электронных систем: Тексты лекций. Чебоксары: Изд-во
Чуваш, ун-та, 1999. — 324 с.
67. Системы фазовой синхронизации/ В.Н. Анисимов, Л.Н. Белю-
стина, В.Н. Белых и др.; Под ред. В.В. Шахгильдяна и Л.Н. Белюсти-
ной. — М.: Радио и связь, 1982. — 288 с.
68. Арнольд В.И. Дополнительные главы теории обыкновенных
дифференциальных уравнений. — М.: Наука. 1978. — 304 с.
69. Холодниок М., Ключ А. И др. Методы анализа нелинейных
динамических моделей. — М.: Мир, 1991. — 368 с.
70. Йосс Ж., Джозеф Д. Элементарная теория устойчивости и би-
фуркаций: Пер. с англ. — М.: Мир, 1983. — 301 с.
71. Марсден Дж., Мак Кракен М. Бифуркация рождения цикла и
её приложения: Пер. с англ. — М.: Мир, 1980. — 368 с.
72. Хэссард Б., Казаринов Н., Вэн И. Теория и приложения би-
фуркации рождения цикла: Пер. с англ. — М.: Мир, 1985. — 280 с.
73. Стрыгин В.В., Соболев В.А Разделение движений методом
интегральных многообразий. — М.: Наука, 1988. — 256 с.
74. Зорич ВА Математический анализ: Учебник. 4.2. — М.: Наука,
1984. - 640 с.
75. Белов Г.А., Малинин Г.В. Разложение отображения последо-
вания ИСН в ряд Тейлора// Динамика нелинейных дискретных элек-
тротехнических и электронных систем: Материалы III Всерос. научно-
техн. конф. — Чебоксары: Изд-во Чуваш, ун-та, 1999. С. 47-52.
76. Белов Г.А., Малинин Г.В. Исследование повышающего ИСН
на границе устойчивости// Информационные технологии в электро-
технике и электроэнергетике: Материалы III Всерос. научно-техн. конф.
— Чебоксары, 2000. С. 130-134.
77. Брюно АД. Локальный метод нелинейного анализа. — М.: Нау-
ка, 1979. — 252 с.
78. Неймарк Ю.И., Ланда П.С. Стохастические и хаотические ко-
лебания. — М.: Наука, 1987. - 424 с.
79. Старжинский В.М. Прикладные методы нелинейных колеба-
ний. — М.: Наука, 1977. — 256 с.
525
ОГЛАВЛЕНИЕ
Предисловие..............................................3
Введение ............................................ 5
1. Основные уравнения силовой части однотактных понижающих
импульсных преобразователей постоянного напряжения...........7
1.1. Уравнения силовой части понижающего преобразователя
в режиме непрерывного тока...................................7
1.2. Уравнения силовой части понижающего
преобразователя с учетом сопротивления конденсатора фильтра ... 14
1.3. Уравнения состояния понижающего ППН с двухзвенным
ZC-фильтром в режиме непрерывного тока......................23
1.4. Уравнения состояния понижающего ППН
в режиме прерывистого тока реактора фильтра.................28
1.5. Уравнения состояния понижающего ППН
с шунтирующим транзистором .................................37
1.6. Импульсный преобразователь, работающий
на цепь якоря электродвигателя постоянного тока.............43
17 Соотношения для определения параметров элементов
силовой части понижающего ППН...............................51
1.8 Улучшение траектории переключения
полупроводниковых приборов ППН.......................... 57
1.9. Расчет силовой части однотактного преобразователя
с прямым включением выпрямительного диода...................62
2. Уравнения силовой части повышающего импульсного ППН . . 72
2.1. Уравнения состояния повышающего ППН..............72
2.2. Соотношения для расчетов повышающего ППН
методом усреднения..........,.............................. 78
2.3. Построение статических характеристик и расчет
силовой части повышающего ППН........................... 93
3. Уравнения силовой части инвертирующего импульсного ППН . . 101
3.1. Уравнения состояния инвертирующего ППН..........101
3.2. Соотношения для расчетов инвертирующего ППН
методом усреднения....................................... 107
3.3. Построение статических характеристик инвертирующего ППН 120
3.4. Дополнительные соотношения для расчета
силовой части инвертирующего преобразователя...............126
3.5. Расчет силовой части однотактного ППН
с обратным включением выпрямительного диода................129
4. Принципы построения, математическое описание
систем управления и статическая точность импульсных ППН....133
4.1. Преобразователь с ШИМ-2 и обратной связью
по выходному напряжению....................................133
4.2. Преобразователи с ШИМ-2 и обратными связями
по выходному напряжению и току реактора....................147
4.3. Особенности функционирования систем управления
с ШИМ-2 в повышающем и инвертирующем ППН.................. 161
4.4. Особенности линеаризации системы управления
с двусторонней ШИМ-2.......................................166
4.5. Линейная импульсная модель понижающего ППН
в режиме прерывистого тока.................................169
4.6. Линейные импульсные модели инвертирующего
и повышающего ППН..........................................173
526
5. Системы управления импульсными ППН с асинхронными
широтно-импульсными модуляторами............................181
5.1. Схемы управления с асинхронными интегральными ШИМ
и обратной связью по напряжению на обмотке реактора фильтра .181
5.2. Схемы управления с асинхронным интегральным ШИМ
и обратной связью по входному напряжению фильтра ....... 186
5.3. Линейные импульсные модели понижающего ППН
с асинхронным интегральным ШИМ............................. 190
5.4. Схема управления с частотно-фазовым ШИМ....196
5.5. Цифровые системы управления импульсными ППН . . . 205
6. Исследование и расчет импульсных ППН методом z-преобразования. 216
6.1. Преобразование импульсной модели
и определение фактора пульсаций для понижающего ППН..........216
6.2. Основные уравнения линейной модели импульсного ППН .. 227
6.3. Анализ устойчивости импульсного ППН.............237
6.4. Анализ импульсного ППН с асинхронным интегральным ШИМ 245
6.5. Рекомендации по выбору параметров ППН
с асинхронным интегральным ШИМ..............................253
6.6. Анализ ППН с частотно-фазовым ШИМ...............255
6.7. Анализ импульсного ШШ с учетом входного ZC-филыра.. . 267
7. Преобразователи постоянного напряжения как
многомерные линейные импульсные сдегемы.....................276
7.1. Подучен”'* разностного уряЕРенил „ передатсщ.иЛ
линейной импульсной модели понижающего ППН............276
7.2. Понижающий импульсный преобразователь
в режиме прерывистого тока................................. 292
7.3. Исследование динамических характеристик
преобразователя в режиме прерывистого тока................. 308
7.4. Вывод линеаризованного разностного уравнения
инвертирующего преобразователя по линейной импульсной модели . 312
7.5. Годографы полюсов импульсной передаточной
функции и устойчивость инвертирующего преобразователя ...... 326
7.6. Вывод линеаризованного разностного уравнения
понижающего преобразователя с асинхронным интегральным ШИМ . 330
8. Исследование импульсных преобразователей методами
теории нелинейных систем.................................. 344
8.1. Исследование устойчивости в целом по
дифференциальному уравнению ............................. . . 344
8.2. Исследование абсолютной устойчивости импульсного
преобразователя с ШИМ-1 по разностному уравнению............353
8.3. Метод отображений последования в теории
импульсных преобразователей..................................361
8.4. Уравнения импульсного преобразователя с учетом
сопротивления конденсатора фильтра и запаздываний
при включении и выключении транзистора.................... 370
8.5. Исследование понижающего преобразователя
в режиме прерывистого тока с помощью функции последования . . 381
8.6. Отображение последования импульсного
преобразователя с асинхронным интегральным ШИМ..............386
527
9. Линеаризация отображения последования и синтез
импульсных преобразователей..................................394
9.1. Линеаризация отображения последования
понижающего импульсного преобразователя ................. ... 394
9.2. Расчет динамических показателей качества
понижающего преобразователя...................................402
9.3. Синтез линейных систем с заданным показателем
колебательности...............................................411
9.4. Синтез импульсных преобразователей частотным методом ... 424
9.5. Оптимальный синтез устройств управления
импульсными преобразователями................................437
10. Исследование нелинейных колебаний в импульсных
преобразователях.............................................451
10.1. Состояние проблемы..............................451
10.2. Сведения из теории бифуркаций...................461
10.3. Уменьшение размерности бифуркационной задачи
сведением на центральное многообразие...................... 470
10.4. Исследование бифуркаций в понижающем импульсном
преобразователе без учета запаздывания модулируемого фронта импульса . 475
10.5. Нормальные формы отображений последования
в окрестности неподвижной точки..............................491
10.6. Особые режимы работы повышающего
импульсного преобразователя..................................505
Заключение...............................................520
Список литературы........................................522
Научное издание
Белов Геннадий Александрович
ДИНАМИКА ИМПУЛЬСНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Монография
Редактор М.М. Федорова
Оригинал-макет подготовлен на кафедре промышленной электроники
Чувашского госуниверситета
Изд. лиц. ЛР № 020279 от 14.01.97.
Подписано в печать 13.04.2001.
Формат 60x84/16. Бумага офсетная. Гарнитура «TimesET». Печать офсетная.
Усл. печ. л. 30,68. Уч.-изд. л. 24,55. Тираж 500 экз. Заказ № 365.
Издательство Чувашского университета
Типография университета
428015, Чебоксары, Московский просп., 15