































































































































Автор: Микеладзе В.Г.
Теги: конструкции авиация типовые конструкции авиационное оборудование авиатехника
Год: 1996



Текст
ЦЕНТРАЛЬНЫЙ АЭРОГИДРОДИНАМИЧЕСКИЙ ИНСТИТУТ
имени профессора Н Е. Жуковского '
АВИАЦИЯ
ОБЩЕГО
НАЗНАЧЕНИЯ
рекомендации для конструкторов
под редакцией
доктора технических наук, профессора
В.Г.Микеладзе
1996
www. vokb-la. spb.ru
Авторы:
Введение. Глава I В.Г.Микеладзе. А. И.Дунаевский, В.Г.Микеладзе.
Глава II В. Д. Боксер, В.Г.Микеладзе, Ю. С. Михайлов, А.В.Петров, Ю. Г. Степанов.
Глава III В.И.Ганабов, А.Н.Кишалов, С.П.Остроухов, Л. М. Певзнер,
А. В. Петров.
Глава IV Л.П.Федоров.
Глава V А.И. Калинин, В.Г.Микеладзе, Ю.М. Рогожкин.
Глава VI А. Г. Обрубов, В.С.Перебатов, В.К.Святодух.
Глава VII В.И.Бирюк.
Глава VIII П.Г.Каркле, Е.И.Соболев.
Глава IX Г.А.Амирьянц, О.С.Мамедов, В.А.Транович.
Глава X » Г.Н.Богомазова,
М. А. Головкин, М.Г. Гоман, С.В.Кабин, Ф. В. Луценко, А.Н.Храбров.
© Центральный аэрогидродинамический институт им. Н.Е.Жуковского
© Рекомендации подготовлены к изданию АО “АЭРОКОН”
ОГЛАВЛЕНИЕ
Введение 7
I. Самолеты общего назначения - классификация, характеристики,
этапы проектирования 8
1.1 Основные типы самолетов общего назначения 8
1.2 Основные этапы проектирования самолетов общего назначения 14
П. Методика аэродинамического проектирования самолетов АОН 16
2.1 . Аэродинамическое проектирование с использованием численных
методов 16
2.2 . Аэродинамическое проектирование крыла 24
2.2.1 Выбор профилировки крыла 25
2.2.2 Механизация крыла 27
2.3 Результаты экспериментальных исследований модели легкого самолета
в АДТТ-102 ЦАГ14 37
2.4 Аэродинамическое проектирование средних сельскохозяйственных
самолетов 40
2.5 Об использовании аэродинамической трубы Т-101 для проведения
натурных испытаний самолетов АОН 44
2.6 Расчет аэродинамических характеристик механизированного крыла 44
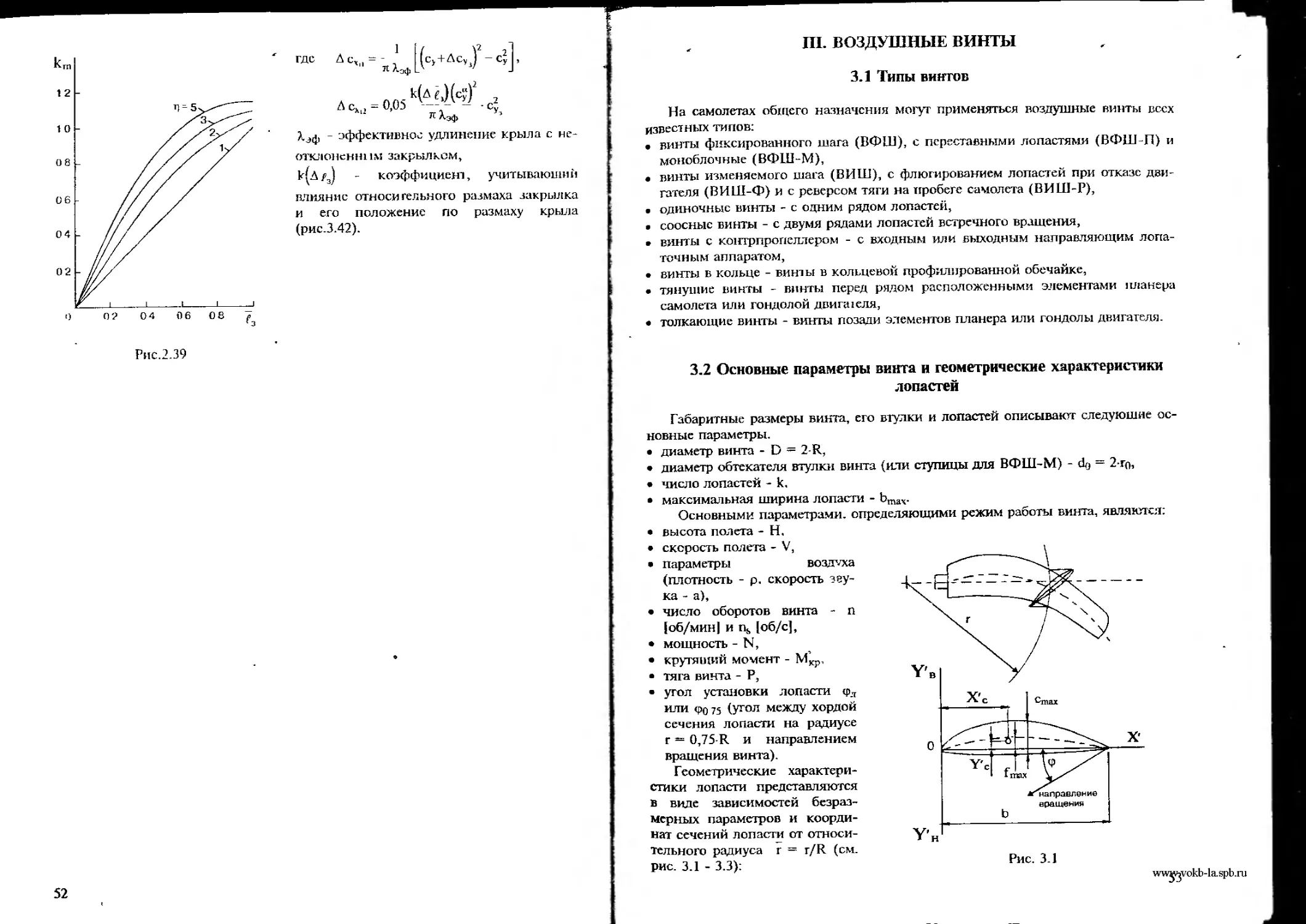
III. Воздушные винты 53
3.1 Типы винтов 53
3.2 Основные параметры винта и геометрические характеристики
лопастей 53
3.3 Аэродинамические характеристики винтов 54
3.4 Влияние различных параметров на аэродинамическую эффективность
винтов 57
3.5 Винты фиксированного шага 61
3.6 Винты в кольце 62
3.7 Влияние винтомоторной силовой установки на аэродинамические
характеристики легких самолетов 63
3.8 Расчетные исследования винтов 25
3.9 Экспериментальные исследования 76
3.10 Требования по акустике 27
3.11 Прочность воздушного винта . * 81
IV. Расчет летных характеристик легких самолетов с винтомоторной
установкой S3
4.1 Скорость сваливания S3
4.2 Взлет 84
4.3 Посадка 85
4.4 Набор высоты 87
4.5 Снижение самолета 90
4.6 Крейсерский полет 91
4.7 Установившийся разворот самолета в горизонтальной плоскости 94
4.8 Оценка маневренных свойств спортивных самолетов 96
V. Аэродинамика органов управления 98
5.1 Эффективность органов управления самолета 98
1 J www.vokb-la.spb.ru
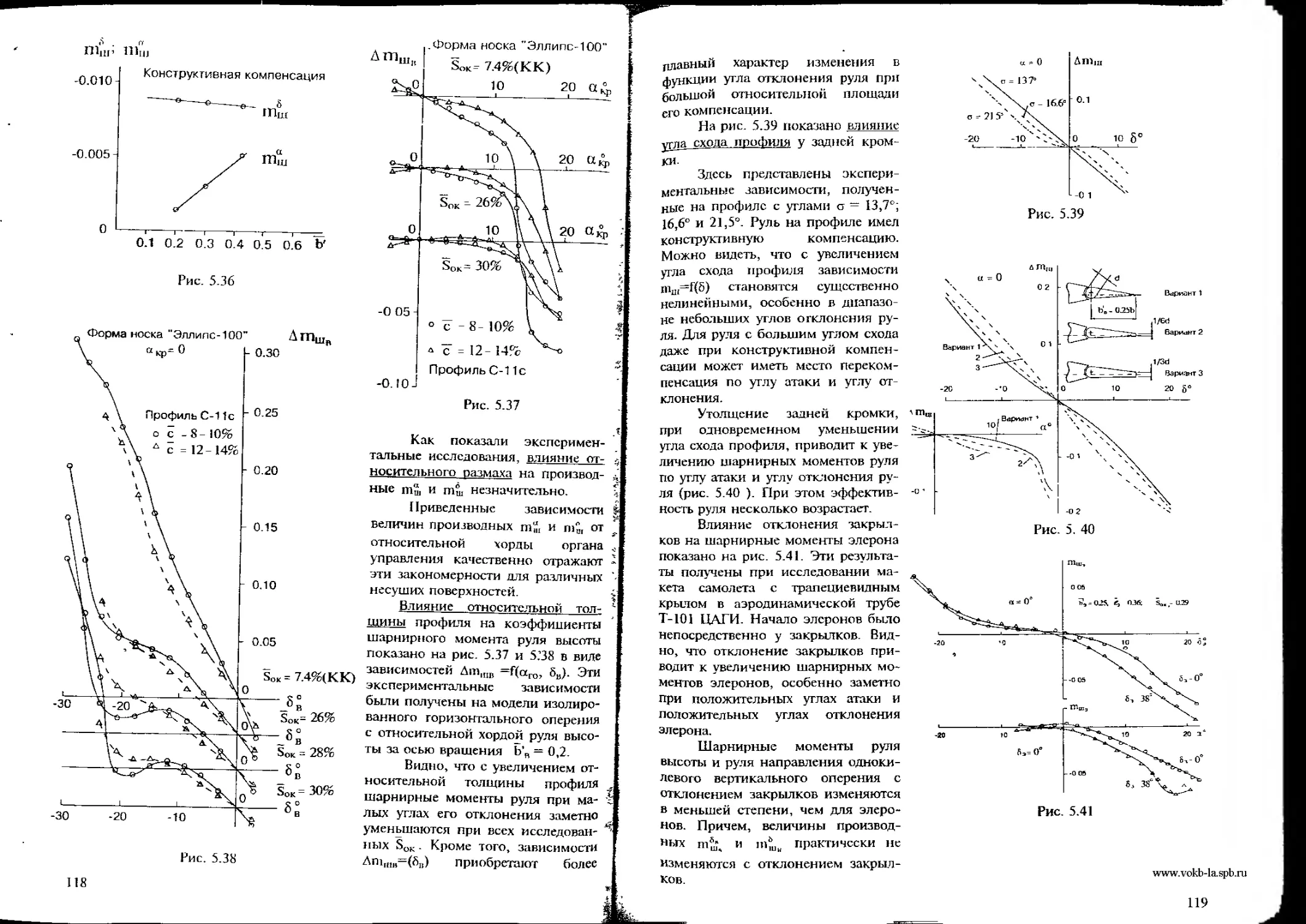
5 2 Коэффициенты шарнирных моментов органов управления самолета 10S
5 3 Приближенным метод расчета шарнирных моментов органов
управления при малых дозвуковых скоростях 123
5 3 1 Шарнирные моменты органов управления, расположенных
вдоль задней кромки прямоугольных несущих поверхностей 123
5 3 2 Шарнирные моменты ор1анов управления, расположенных на
задней кромке трапециевидных несущих поверхностей 128
VI. Устойчивость и управляемость легких самолетов общего назначения 130
Введение 130
6 1 Системы координат и условные обозначения 131
6 1 1 Системы координат 131
6 1 2 Условные обозначения 132
6 2 Продольная устойчивость и управляемость 135
6 2 1 Скорость сваливания самолета 135
6 2 2 Продольная статическая устойчивость и нейтральная центровка
самолета 136
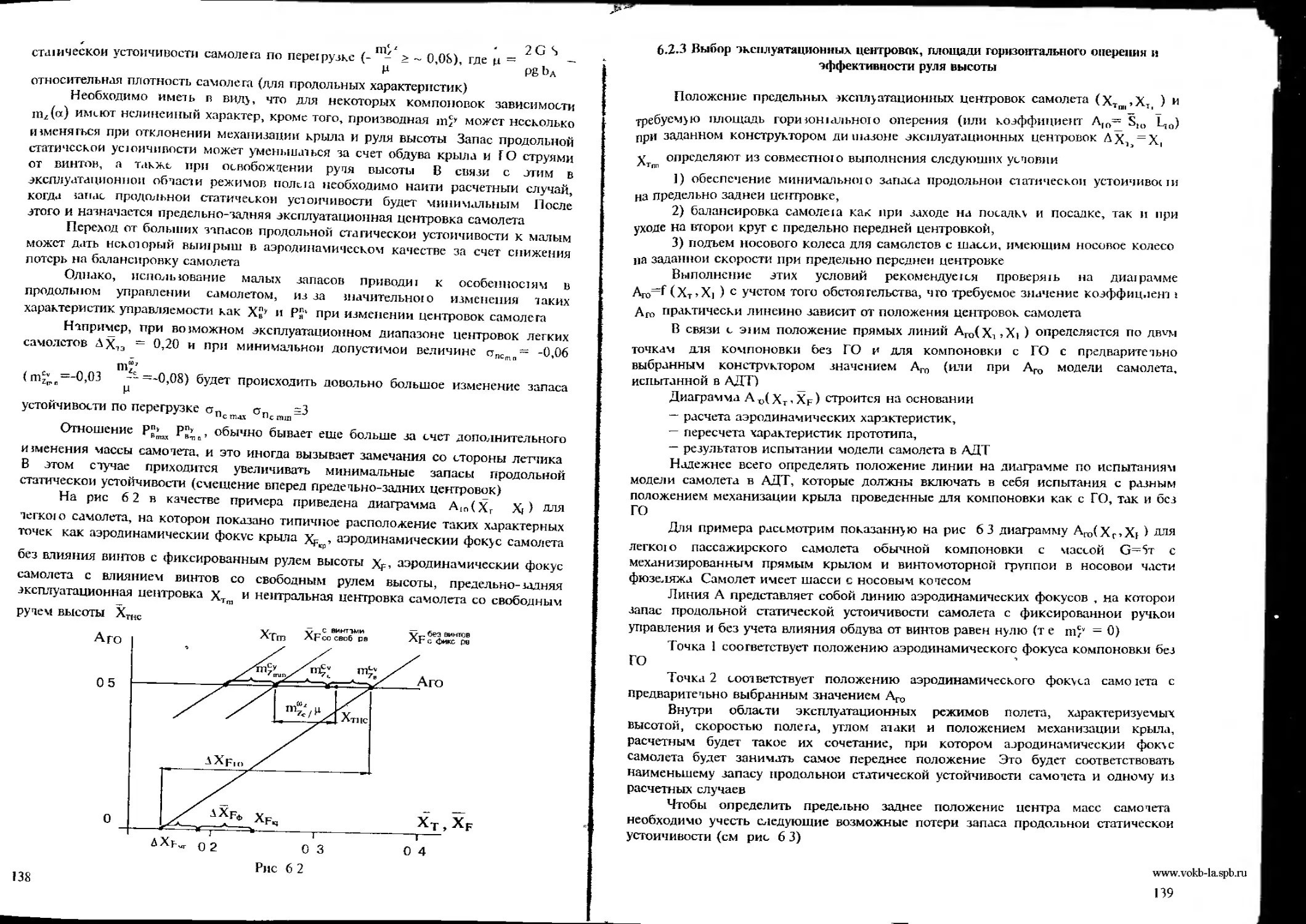
6 2 3 Выбор эксплуатационных центровок, площади i оризонтального
оперения и эффективности руля высоты 139
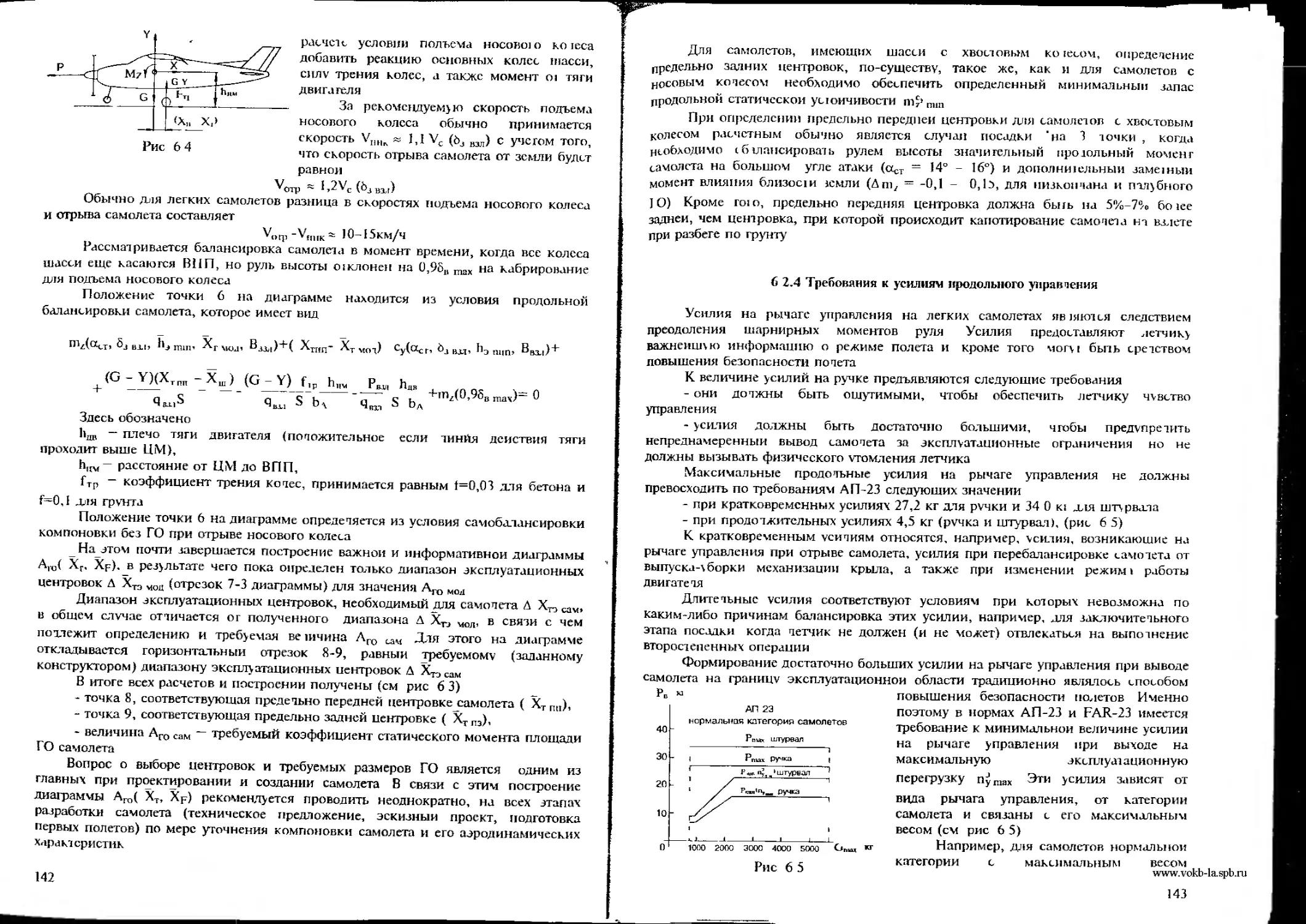
6 2 4 Требования к усилиям продольного управления 143
6 2 5 Обеспечение продольных усилий в горизонтальном полете 145
6 2 6 Требуемые характеристики продольной управляемости самолета
при маневрах 146
6 3 Боковая устойчивость и управляемость 149
6 3 1 Общие указания и требования 149
6 3 2 Выбор параметров вертикального оперения 152
6 3 3 Приближенный расчет степени устойчивости пути и эффектив-
ности рутя направления 153
6 3 4 Приближенный расчет поперечной статической устойчивости и
выбор угла поперечного “V ’ крыла 157
6 3 5 Определение потребной эффективности элеронов 159
6 3 6 Определение потребных характеристик поперечной управляемос-
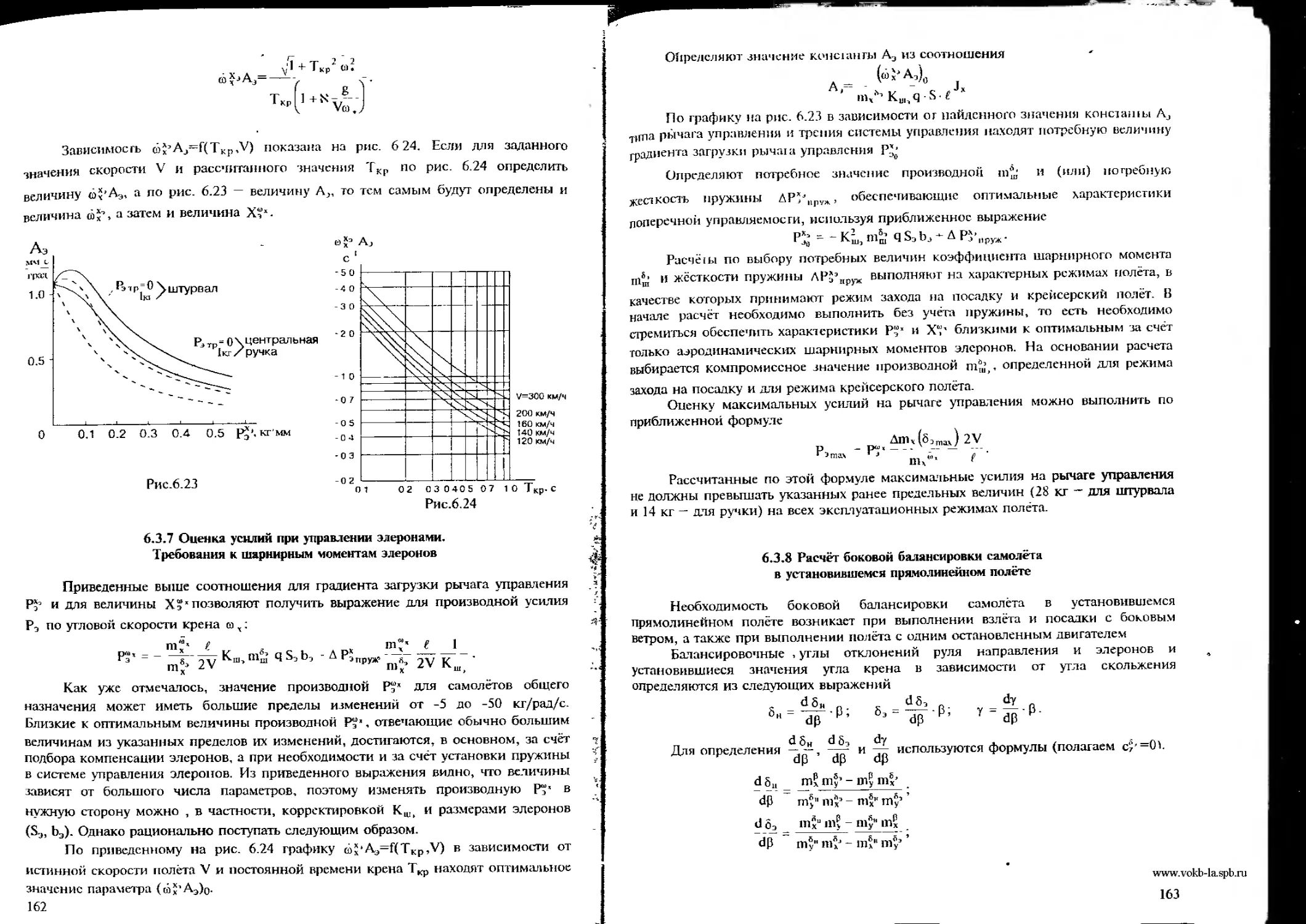
ти (производных Р7* и X?) 161
6 3 7 Оценка усилий при управлении элеронами Требования к
шарнирным моментам элеронов 162
6 3 8 Расчет боковой балансировки самолета в установившемся
прямолинейном полете 163
6 3 9 Расчет характеристик бокового возмущенного движения 165
6 4 Расчетная оценка коэффициентов демпфирующих моментов,
влияние работающих двигателей и освобождения рулей
Вспомогательные материалы 167
6 4 1 Расчет коэффициентов демпфирующих моментов 167
6 4 2 Влияние работающих двигателей на аэродинамические характе-
ристики самолета 169
6 4 3 Влияние освобождения рулей на аэродинамические характерис-
тики самолета 174
6 4 4 Формулы для пересчета коэффициента продольного момента на
другую центровку 176
6 4 5 Моделирование динамики полета на пилотажных стендах 177
6 4 6 Характеристики пилотажных стендов НАГИ для неманевренных
самолетов и самолетов авиации общего назначения 180
6 4 7 Перечень материалов, представляемых в ЦАГИ лля составления
4
“ Заключения на первые полеты легкого пассажирското
само ieia’ 181
VTI Обеспечение прочности конструкции планера и весовой эффективности
самолетов ЛОИ на этапе проектирования 182
VIII 11оследова!елы!ос1ь работ и основные рекомендации для обеспечения
безопасности от флш гера леших самолетов общего назначения 192
8 I Общие положения 192
^82 Основные рекомендации 194
8 3 Перечень работ, необходимых для анализа флаттера 195
8 4 Составление предварительной сводки исходных данных 196
8 5 Анализ данных о прототипах 196
8 6 Определение частот и форм собственных колебании отдельных частей
самолета 197
8 7 Определение частот и форм собственных колебании самолета в целом 198
8 8 Расчет весовой балансировки органов управления 198
8 9 Предварительный расчет безрулевых форм флаттера 200
8 10 Пример расчета 202
8 11 Расчет рулевых форм флаттера 203
8 12 Расчет на флаттер самолета в целом 203
8 13 Контрольные испытания для проверки и уточнения исходных
данных Частотные испытания 203
8 14 Коррекция результатов анализа по данным контрольных испытании 204
8 15 Составление сводных данных по безопасности от флаттера 204
8 16 Легные испытания на флаттер 204
IX. Обеспечение безопасности по условиям статической аэроупругости
самолетов общего назначения 206
Введение 206
9 1 Методы коэффициентов влияния и многочленов 207
9 2 Метод Гроссмана 208
X Экспериментальные и теоретические методы исследования штопора 213
Введение 213
10 1 Критические режимы движения самолета 215
10 2 Вопросы подобия при моделировании динамики штопора 218
10 3 Приближенные критерии сваливания ’ 222
10 4 Особенности аэродинамических характеристик самолетов на боль-
ших углах атаки 228
10 4 I Продольные аэродинамические характеристики 228
10 4 2 Боковые аэродинамические характеристики 231
10 4 2 1 Поперечная и путевая устойчивость 231
10 4 2 2 Аэродинамическая авторотация 236
10 4 2 3 Аэродинамическая асимметрия 242
10 4 3 Эффективность органов управления 246
10 4 4 Аэродинамический гистерезис 250
10 4 4 1 Статический гистерезис 251
10 4 4 2 Динамический гистерезис и особенности нестаци-
онарных аэродинамических характеристик 253
10 5 Исследование динамики самолета в штопоре с помощью ЭВМ 25\vww. vokb-la.spb.ru
10 5 1 Описание аэродинамических характеристик самолета 255
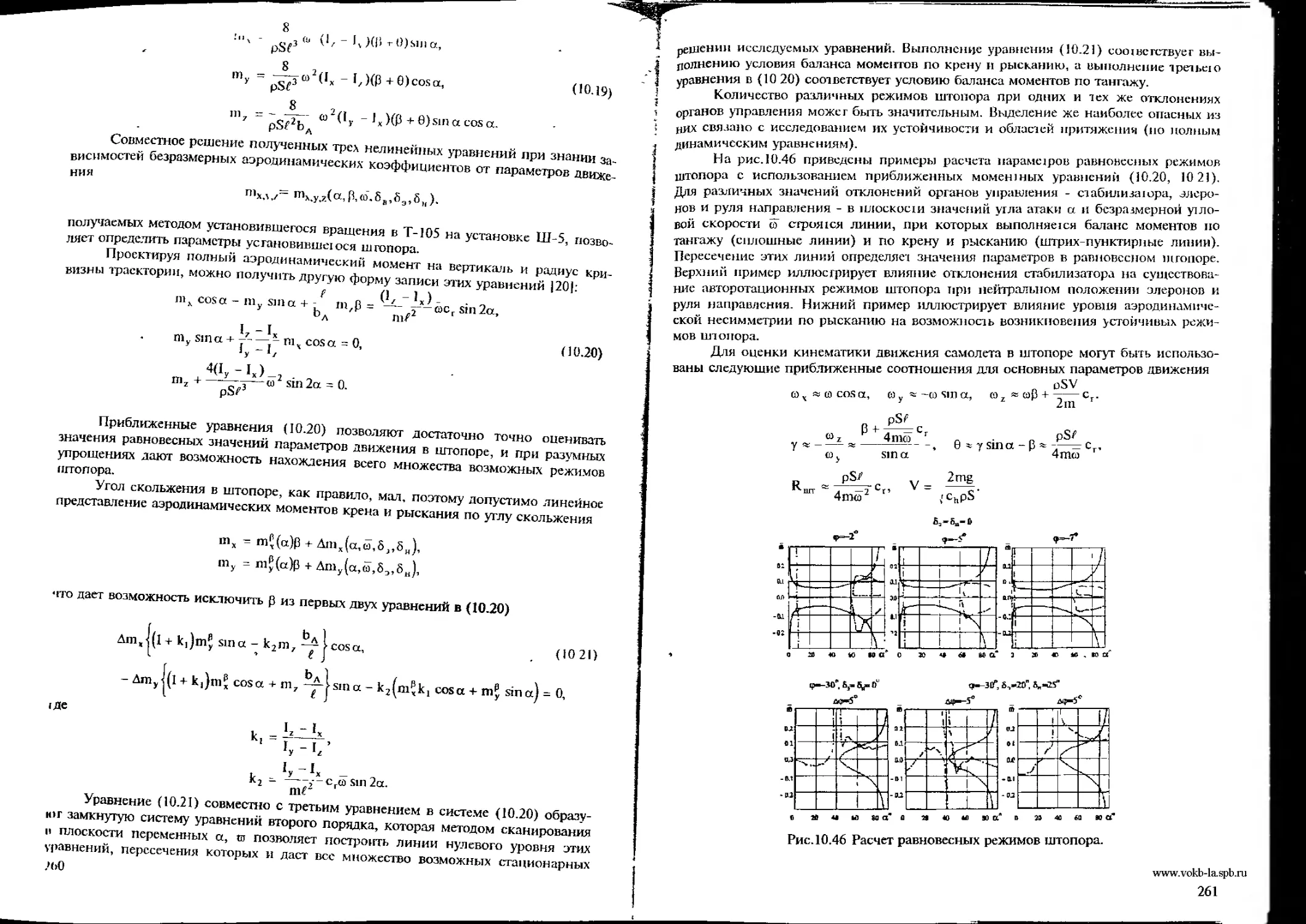
10 5 2 Расчет равновесных режимов 258
5
10.5.3 Исследование динамических особенностей 262
10.5.4 Приложение 1 263
10.6 Экспериментальные методы исследования в АДТ 266
10.6.1 Экспериментальное оборудование АДТ-105 для игумения
аэродинамики и динамики штопора 266
10.6.1.1 Прибор Ш-4 267
10.6.1.2 Прибор Ш-5 269
10.6.1.3 Измерительно-информационная управляющая вычис-
лительная система (И ИУВС-105) 271
10.6.1.4 Оборудование для исследования свободно штопоря-
щих моделей самолетов 272
10.6.2 Типовая программа испытаний свободно штопорящих моде-
лей в АДТ-Ю5 276
10.6.2.1 Нормальный штопор 276
10.6.2.2 Перевернутый штопор 277
10.6.2.3 Испытания с противоштопорными средствами 278
10.6.3 Изготовление моделей самолетов 279
10.6.3.1 Свободно штопорящие модели 279
10.6.3.2 Расшифровочная модель 282
10.6.3.3 Модель самолета для испытаний на приборах Ш-4 и
Ш-5 282
10.6.3.4 Перечень изделий и технической документации, пред-
ставляемых при сдаче модели для испытаний 282
10.6.4 Обработка результатов испытаний моделей самолетов 283
10.6.4.1 Эксперимент со свободно штопорящими моделями:
точность измерений, сходимость с летными испыта-
ниями 283
10.6.4.2 Испытания на приборах Ш-4, Ш-5; погрешность
измерений 284
10.6.5 Исследование физической картины обтекания в гидродинами-
ческой трубе 285
10.6.6 Исследование нестационарных аэродинамических характеристик
в широком диапазоне углов атаки и скольжения 286
10.6.6.1 Конструкция модернизированной установки
ОВП-Ю2Б 286
10.6.6.2. Система управления установкой и сбора данных в
процессе эксперимента 289
10.6.6.3 Сравнение результатов эксперимента, полученных
методами установившегося вращения и вынужденных
колебаний 291
Литература 293
6
ВВЕДЕНИЕ
В последние годы в Российской Федерации широко развертываются работы
по созданию самолетов общего назначения. Как показывает мировая практика,
использование авиации общего назначения (ДОН) достаточно эффективно во
многих отраслях народного хозяйства (авиахимработы, патрулирование, охрана
лесов и рыбных запасов, медицинское и почтовое обслуживание, аэротакси,
служебные и деловые цели предпринимателей, организация туризма, спорта,
отдыха и др.). Созданием самолетов ДОН занимаются крупные опытно-
конструкторские бюро (ОКБ), где этот вид деятельности составляет лишь часть их
загрузки (например, ОКБ им. А. Н. Туполева, С. В. Ильюшина, Л. И.Микояна,
А.С.Яковлсва, П.О.Сухого, О.К.Антонова, В.М.Мясищева), а также сравнительно
небольшие ОКБ, для которых создание самолетов АОН является основной задачей.
Учитывая специфику самолетов общего назначения, принято решение о том, что
ОКБ должны иметь сертификат на право создания самолетов АОН.
С целью оказания технической помощи ОКБ при создании самолетов АОН
на ранней стадии проектирования разработаны настоящие "Рекомендации для
конструкторов" (РДК).
РДК для самолетов общего назначения являются комплексными и
охватывают вопросы аэродинамики, выбора параметров, аэродинамики силовой
установки, устойчивости и управляемости, прочности, аэроупругости, штопора.
В настоящем выпуске рассматривается класс самолетов АОН со ылгтнои
массой до 5760 кг, со скоростью полета до 400-500 км/час, где еще практически не
проявляется влияние сжимаемости воздуха. В качестве силовых установок
используются поршневые (ГЩ) или турбовинтовые двигатели (ТВД) с тянущими
или толкающими винтами. Для самолетов этого типа характерно разнообразие
аэродинамических схем: нормальная, утка, триплан. Выбор схемы диктуется
самыми различными соображениями. Поэтому в каждом отдельном случае должен
быть проведен сравнительный анализ различных аэродинамических схем и выбрана
наиболее рациональная. Необходимо отметить, что в любом случае самое важное
требование - обеспечение безопасности полета.
Данные РДК составлены на основании результатов тематических
исследований, проведенных в НАГИ в последние годы, а также некоторых
результатов исследований конкретных самолетов и их моделей в аэродинамических
трубах (АДТ), проводимых ЦАГИ совместно с ОКБ.
По мере накопления научного задела в ближайшие годы будет осуществлено
второе дополненное издание РДК.
www. vokb-la. spb.ru
7
I. САМОЛЕТЫ ОБЩЕГО НАЗНАЧЕНИЯ - КЛАССИФИКАЦИЯ,
ХАРАКТЕРИСТИКИ, ЭТАПЫ ПРОЕКТИРОВАНИЯ
1.1 Основные типы самолетов общего назначения
В соответствии с определением ICAO (Конвенция 1944 г , г Чикаго, США)
АОН является "Гражданская авиация, которая выполняет все виды операций, за
исключением регулярных воздушных сообщений и нере1улярных авиатранспортных
перевозок, осуществляемых за плату или по найму'.
Летательные аппараты (ЛА) авиации общего назначения - это самолеты,
вертолеты, аэростаты и 1 п , находящиеся в нерегулярной эксплуатации, т е вне
сферы деятельности коммерческих авиакомпаний, осуществляющих перевозки
пассажиров и грузов по расписанию Эти ЛА используются государственными
организациями, фирмами и частыми лицами в собственных целях
Привлекательность АОН заключается в ее способности выполнять задачи,
несвойственные коммерческой авиации - перевозку небольших грузов,
сельхозрабозы, патрулирование, обучение пилотированию, авиационный спорт,
туризм и т п , а также в существенной экономии времени для ее пользователей
Последнее достигается за счет возможности летать вне расписания, способности
использовать для взлета и посадки небольшие аэродромы или элементарно
подготовленные площадки, количество которых существенно превосходит число
аэродромов для рейсовых самолетов, и которые расположены ближе к
пользователю Кроме того, пользователь не тратит время на оформление и
регистрацию авиабилетов и имеет возможность выбора прямого (без пересадки)
маршрута до места назначения
Как правило, самолеты АОН - легкие аппараты, имеющие взлетную массу до
8,6 т Однако, если какая-либо фирма или частное лицо приобретает большой
самолет и эксплуатирует его в собственных целях, то данный ЛА будет относиться
к АОН и использоваться в соответствии с правилами эксплуатации АОН
До настоящего времени в России АОН существовала в качестве авиации
ПАНХ (применение авиации в народном хозяйстве), авиации ДОСААФ,
любительской и экспериментальной авиации
Авиация ПАНХ, структурно входившая в состав Аэрофлота и имеющая в
своем распоряжении самолеты Ан-2, Ил-12, Ил-14 и вертолеты, занималась
обслуживанием отраслей народного хозяйства, в том числе проведением
авиахимработ, патрулированием, снабжением геологоразведочных партий,
вахтовиков и тд
ДОСААФ занималось подготовкой спортсменов и ’ кадров ВВС Его парк
состоял из самолетов Як-18Т, Як-50, Як-52, Су-26, легких вертолетов Ми-2, Ка-26
Любительская и экспериментальная авиация состояла из ЛА, построенных в
авиационных учебных заведениях, общественных конструкторских бюро и
отдельными любителями авиации В начале 80-х годов, когда возобновились
смотры-конкурсы самодельных ЛА, были созданы Федерация любителей авиации
(ФЛА), Объединенная федерация сверхлегкой авиации (ОФ СЛА), которые
рассматривают вопросы освидетельствования самодельных ЛА, их допуска к
по тегам, обучают пилотированию и выдают свидететьства пилота-любителя
В настоящее время АОН России находится в стадии реорганизации в
соответствии с изменившимися экономическими условиями Хотя этот процесс в
силу ряда причин идет с большим трудом, известными и новыми
конструкторскими бюро создано значительное число проектов, ряд из которых
находится на стадии летных испытаний
Существуют различные подходы к классификации самолетов АОН
Например, в нормах летной годности самолеты подразделяются по взлетному весу,
8
количеству пассажиров числу и типу двигателей и т п Однако, для проецирования
наиболее важными факторами, определяющими облик ЛА, являются его
назначение и ожидаемые условия эксплуатации
В зависимости от назначения (рис 1 1) можно выделить две основные
группы самолетов АОН - многоцелевые самолеты и специализированные самолеты
Рис 1 1 Классификация самолетов АОН
Многоцелевые самолеты предназначены для решения широкого круга задач
перевозки пассажиров, грузов патрулирования и тп Это достигается за счет
переоборудования и переоснащения самолета для решения конкретной задачи при
минимальных конструктивных изменениях или без таковых В бывшем СССР
типичным представителем этого класса самолетов был Ан-2, который
использовался на местных воздушных линиях в качестве пассажирского, а в
районах Севера и Сибири в качестве легкого транспортного самолета Кроме того,
в переоборудованном варианте это был единственный сельскохозяйственный
самолет
В зависимости от способности взлетать и садиться не только на обычные
аэродромы но и использовать для этих целей водную поверхность морей рек и
озер многоцелевые самолеты бывают наземного базирования и амфибииными
Уровень летно-технических характеристик самолетов-амфибий ниже, чем у
самолетов наземного базирования из за их конструктивных особенностей -
килеватости днища, наличия скул, редана, поплавков, необходимосги усиления и,
следовагельно утяжеления конструкции, взаимодействующей с водой, а также в
связи с необходимостью сохранять шасси обычных наземных самолет ов^Е^^в^.
случаев некоторые самолеты наземного базирования мотут быть установлены на
9
лоп тики и ±д сче< этого эксплуатироваться с воды Однако, их летные
характеристики будут хуже, чем у специально спроектированных самолетов-
амфибий
В зависимости от величины полезной нагрузки (количества пассажиров)
можно составить типоразмерный ряд самолетов Обобщенные характеристики
многоцелевых самолетов, в том числе самолетов-амфибии, в зависимости от их
пассажировместимости приведены в табл 1.1-1 2. Необходимо отметин,, что
основная обласгь применения самолетов с пассажировместимостью 1-2 человека,
те 2-3 местных - это первоначальное обучение пилотированию и патрулирование
Малая коммерческая нагрузка этих ЛА существенно сужает возможность их
использования как полноценных многоцелевых самолетов.
Основные характеристики Пассажировместимость, чел
1-2 3-4 5-6 7-9 10-14 15-19
Вес коммерческой нагрузки, т 0,1-0,2 0,3-0,4 0,5 0,6 0,7-1,0 1,0 1,5 1,5 2,0
Взлетный вес, т 0,7-1,0 до 1,5 1,8-2,3 3,0-4,5 5,0 6,0 6,0-8,0
Крейсерская скорость полета, км/ч 140-200 200-250 250-350 350-450 400-450 до 550
Дальность полета с максимальной коммерческой нагрузкой, км 500-800 500-900 500-1000 800-1000 Л 000 1000- 1500
Максимальная дальность полета, км -1000 1000- 1200 1000- 1500 2000- 2500 до 3000 до 3500
Длина ВПП, м 300-400 300-500 400-600 400-700 500-800 600-900
Количество * тип двигателя I * пд 1 * пд 1 2 * ПД 1-2 ПД/ТВД 2 * ТВД 2 * ТВД
Взлетная мощность, л.с. 100-160 180-240 320-440 500-900 1000 1500 1600 2000
Часовой расход топлива, кг/ч 15-30 35-46 60-75 90-150 180-260 380-460
Табл 1.1 Типоразмерный ряд и обобщенные характеристики легких многоцелевых
самолетов
Основные характеристики Пассажировместимость, чел
1-2 3-4 5-6 7-9 10-14 15-19
Вес коммерческой нагрузки, т 0,1-0.2 0,3-0,4 0,5-0,6 0,7-1,0 1,0-1,5 1,5-2.0
Взлетный вес, т 0,8-1,2 1.5-1,7 1,8-2,5 3,5-4,8 5,0-6,0 6,0-8,6
Крейсерская скорость полета, км/ч 160-1800 180-200 250-300 300-350 ’ 400-450 до 550
Дальность полета с максимальной коммерческой нагрузкой, км -400 П-500 500 700 800-900 -1000 1000- 1500
Максимальная дальность полета, км -800 U-10OO 1000- 1500 -2000 до 2500 до 2500
Длина ВПП (наземный аэродром), м -300 -400 -500 -600 700-800 800 900
Допустимая высота волны, м -0,3 0,4-0,45 -0,6 .0,8 -1,0 -1,2
Количество * тип двигателя 1 * ПД 1 * пд 1-2 * ПД 1-2 ПД/ТВД 2* ТВД 2* ТВД
Взлетная мощность, л с. 150-200 220-250 360-500 750-900 1500 2000
Часовой расход топлива, кг/ч 20 40 40-50 80-90 120-170 250-300 450-500
1абл. 1.2 Типоразмерный ряд и обобщенные характеристики легких многоцелевых
самолете в-амфибий
10
Специализированные самолеты ориентированы на выполнение какой-либо
одной задачи Эти самолеты обладают особенностями, которые выделяют их среди
других ЛА. Специализированные самолеты создаются тогда, когда доля
конкретного вила работ начинает превосходить остальные, или когда
платежеспособный заказчик требует особых свойств изделия Различают
сельскохозяйственные, учебные, спортивно-пилотажные, патрульные и т п
самолеты Наибольшее распространение получили сельскохозяйственные, учебные,
и спортиьно-пило1ажные самолеты В габл. 1.3-1 5 представлены основные
типоразмеры этих ЛА и приведены обобщенные летно-тсхнические характеристики
данных самолетов
До недавнего времени в состав АОН входили административные самолеты
(АС), которые предназначены для осуществления полетов служебного характера
руководителей государств, ведомств, частных фирм, банков и бизнесменов,
существенно экономя их время АС отличаю! большие скорости полета и высоким
уровень комфорта для пассажиров В настоящее время АС выделены в
самостоятельный класс авиации В зависимости от дальности полета различают
ближние, средние и дальние АС В качестве ближних АС (с дальностью полета до
2,5-3,5 тыс км) широко используются переоборудованные салонами с повышенным
уровнем комфорта многоцелевые самолеты с турбовинтовыми двигателями, а их
парк составляет около половины парка всей деловой авиации
Сельскохозяйственные самолеты используются дчя химической обработки
полей и лесов с целью внесения удобрении и борьбы с вредителями. Эти само четы
имеют встроенный в конструкцию бункер для размещения химикатов
Предусмотрен ряд мероприятий, которые повышают безопасное!ь выполнения
сельхозработ Так, например, у подавляющего большинства сельскохозяйственных
самолетов бункер расположен между двигательным отсеком и кабиной экипажа
Такая компоновка позволяет обезопасить пилота при возможном столкновении с
землей за счет поглощении энергии удара конструкцией мотогондолы и бункера
При расположении бункера за кабиной, как это имело место у сельхозвариантов
многоцелевых самолетов, при столкновении тяжелый бункер может смять кабину
Для защиты экипажа от неблагоприятного воздействия химикатов кабины
сельхозсамолетов имеют надув.
Тип самолета Легкий Средний Тяжелый Сверхт яж.
Вес химикатов, т 0,5-0,6 0,8-1,0 1,5-2,0 2,5-2,7
Взлетный вес, т 1,3-1,5 1,8-2,1 2,7-3,5 5.3-5.7
Экипаж, чел , 1 1 1-2 1-2
Скорость полета при авиа- химработах, км/ч 150 160-170 170-180 170-190
Ширина обрабатываемой за один пролет полосы, м 10-11 12-13 14-15 ~20
Дальность полета, км 500 500 500 500
Длина ВПП, м 300-400 400-500 500-600 700-800
Количество * тип двигателя I * ПД 1 * пд 1 * ТВД 1 *ТВД
Взлетная мощность, л.с 200-230 300-400 550-750 1000-1500
Часовой расход топлива, кг/ч .40 ~60 150-180 230-330
Табл 1 3 Типоразмсрный ряд и обобщенные характеристики сельскохозяйственных
самолетов www.vokb-la.spb.ru
Учебные самолеты предназначены для обучения пилотированию. Эти
аппараты сочетают относительно невысокую стоимость конструкции с повышенной
безопасностью и надежностью. Различают самолеты первоначального обучения и
учебно-тренировочные. Первые, как правило, имеют рядное расположение кресел
инструктора и курсанта, вторые - тандемное.
Спортивно-пилотажные самолеты специально спроектированы для участия в
соревнованиях по высшему пилотажу. Эти ЛА обладают высокой маневренностью в
прямом и перевернутом полете, а также повышенной прочностью конструкции.
Тип самолета Первоначального обучения Учебно- тренировочным
Взлетный вес, т 0,7-0,8 0,9-1,3
Экипаж, чел 2 2
Схема расположения экипажа рядное(бок о бок) тандем (друг за другом)
Скорость полета, км/ч 150-200 200-300
Дальность, полез а, км/ч 500-700 500-100
Длина ВНП, м 350-450 350-500
Количество * тип двигателя 1 * пд 1 * пд
Взлетная мощность, л. с. S0-150 160-300
Часовой расход топлива, кз/ч 12-20 25-50
Диапазон эксплуатационных перегрузок -3...+6 -3...+6
Табл. 1.4 Обобщенные характеристики учебных самолетов
Тил самолета Одноместный Двухместный
Взлетный вес, т 0,6-0,85 0,8-1.1
Количество * тип двигателя 1 * пд 1 * ПД
Взлетная мощность, л.с. 250-400 300-400
Максимальная скорость полета, км/ч 300-450 300-450
Скорость вращения относительно продольной оси самолета. раД/с 6-7 6
Скороподъемность, м/с 18-24 16-17
Диапазон эксплуатационных перегрузок -10...+ 12 -9...+ 11
Табл. 1.5 Обобщенные характеристики спортивно-пилотажных самолетов
Большинство из вышеуказанных самолетов АОН проектируются в
соответствии со специальными нормами летной годности легких самолетов АП-23
(FAR-23), которые отличаются от норм обычных транспортных самолетов - ЕНЛГС
или АП-25 (FAR-25). В частности:
- допускается использование однодвигательной силовой установки;
- разрешается наличие одного члена экипажа;
- упрощен состав оборудования и Т.д.
Наличие этих допущений приводит к ограничениям в эксплуатации
самолетов АОН. В частности, запрещено их коммерческое использование
12
(регулярные перевозки пассажиров и грузов), управление воздушным движением и
аэропорты отдают предпочтение рейсовым самолетам и т.п. 'Гем нс менее, для
большинства ЛА АОН наличие сертификата летной годности является
обязательным условием их допуска к эксплуатации. Исключение из этого правила
составляют, пожалуй, только любительские и экспериментальные самолеты.
К любительским ЛА относятся аппараты, которые построены любителями
авиации или с их участием и используются ими для целей технического творчества,
авиационного туризма и спорта. Как правило, это 1-2 местные самолеты,
относящиеся к категории "улыралегких" или "очень легких" самолетов и
оборудованные маломощными поршневыми двигателями (табл. 1.6). Конструкция
этих аппаратов отличается большим разнообразием - от самолетов с открытой
кабиной и трубя ато-рас палочной конструкцией с тканевой обшивкой до
аэродинамически совершенных образцов, выполненных из алюминиевых сплавов
или композиционных материалов. Данные самолеты могут быть сертифицированы
в соответствии с особыми нормам годности "легких”, "очень легких" или
"ультралегких" самолетов (FAR-23, JAR VLA, FAR-103), а также продаваться в
собранном виде или в качестве наборов агрегатов, сборку которых производит
покупатель. В последнем случае сертификация самолета не требуется. В некоторых
странах условием продажи самолета в виде комплекта является условие
выполнения покупателем 51% работ по изготовлению ЛА (с учетом квалификации
сборщика). Любительские самоЛеты обычно оснашены минимальным составом
оборудования, что позволяет им летать только днем, в хороших метеоусловиях и в
районе аэродрома владельца. Благодаря низким ценам эти ЛА пользуются широкой
популярностью среди пилотов и конструкторов-любителей.
Тип самолета Сухопутные Амфибийные
1-местный 2-местный 1-местный 2-местный
Взлетный вес, кг 240-450 400-600 300-450 450-650
Скорость полета, км/ч 80-200 120-200 80-150 120-170
Дальность полета, км до 500 до 500 до 500 до 500
Длина разбега/пробега, м 80-150/ 70-140 80-150/ 70-140 80-150/ 70-140 80-150/ 70-140
Количество * тип двигателя 1 * пд 1 * ПД 1 * пд 1 * ПД
Взлетная мощность, л.с. 40-60 50-90 . 45-65 65-100
Часовой расход топлива, кт/ч 7-11 9-17 10-12 12-20
Табл. 1.6 Обобщенные характеристики любительских самолетов
Экспериментальные самолеты создаются с целью экспериментальной
отработки новых аэродинамических схем, для проверки новых концепций,
накопления опыта по работе новых материалов в различных условиях эксплуатации
и т.п.
www. vokb-la. spb.ru
13
1.2 Основные этапы проектирования самолетов общего назначения
Проектирование представляет собой сложный итерационный процесс,
направленный на создание самолета, максимально отвечающего своему
назначению и условиям эксплуатации. В связи с большим разнообразием типов и
типоразмеров самолетов авиации общего назначения не существует единой
методики их проектирования. Однако, в целях избежания грубых ошибок при
разработке и обеспечения максимальной экономии времени и средств, а также
безопасности эксплуатации, необходимо придерживаться принятых в
самолетостроении этапов проектирования.
Внешнее проектирование (разработка технического задания)
Ранее, в связи с тем, что в качестве заказчика, инвестора и эксплуатанта
выступало государство, разработка технического задания (ТЗ) осуществлялась
государственными научно-исследовательскими институтами гражданской авиации и
авиационной промышленности. Сегодня, в связи с изменившимися условиями,
разработчику зачастую самому приходиться формировать ТЗ, а содержание этапа
несколько расширилось.
На этапе внешнего проектирования на основе анализа современного
состояния, тенденций развития, прогнозов потребностей в самолетах разных
классов определяются наиболее перспективные для разработки типы летательных
аппаратов. Далее, учитывая производственные, финансовые и другие возможности
разработчика, наличие научно-технического задела, "ноу-хау", предшествующий
опыт создания и эксплуатации, осуществляется выбор конкретного типа и
формируется первоначальная концепция летательного аппарата, заключающаяся в
определении общих принципов создания, основных летно-технических и
эксплуатационных характеристик. Концепция и потенциальный спрос на самолет
уточняются после согласования с потенциальным заказчиком характеристик
самолета и формирования окончательных (с учетом уровня развития техники)
тактико-технических требований. Кроме того, на данном этапе должна быть
просчитана экономическая эффективность проекта (затраты на программу, размеры
потенциальной прибыли, срок окупаемости), выбраны соразработчики и партнеры
по проекту, определены способы продвижения товара на рынок и т.д. Как правило,
данный этап заканчивается составлением бизнес-плана и поиском инвестора.
Техническое предложение (аван проект)
На данном этапе разработчик производит:
- выбор аэродинамической компоновки,
- выбирает силовую установку,
- рассчитывает основные аэродинамические характеристики (АДХ),
- определяет в первом приближении весовые характеристики,
- определяет структуру основных систем и оборудования самолета (гидро-, пневмо-,
электросистем, системы управления, пилотажно-навигационного и радио-связного
оборудования),
- выбирает конструктивно-силовую схему (КСС) и основные конструкционные
материалы,
- составляет сертификационный базис (перечень пунктов Норм летной годности
(НЛГ), которым должен соответствовать самолет),
- рассчитывает летно-технические и взлетно-посадочные характеристики,
определяет их соответствие ТЗ,
14
- 6 случае необходимости производит коррекцию проектных параметров самолета
для удовлетворения ТЗ.
Эскизный проект (ЭП)
На этом этапе осуществляется детальная отработка аэродинамической
компоновки самолета (профилировка крыла, тип и размеры механизации крыла,
органов управления). Уточняются аэродинамические, весовые (устанавливаются
весовые лимиты), лети о-технические и взлетно-посадочные характеристики,
характеристики устойчивости-управляемости, силовой установки. Осуществляется
детальная проработка всех систем и оборудования самолета. Определяются
натрузки, дейшвующие на самолет, их значения и повторяемость. Осуществляется
окончательный выбор конструкционных материалов, типов соединений и
технологических процессов. Проводятся экспериментальные работы, включая
продувки в аэродинамических трубах. Этап ЭП обычно заканчивается
изготовлением макета, на котором отрабатывается взаимная пространственная
увязка агрегатов самолета и систем, размещение оборудования, оценивается
удобство размещения экипажа и пассажиров . В случае совсем легкого самолета это
может быть макет кабины и проводки управления.
Рабочий проект (РП)
На этапе РП выпускается вся конструкторская документация, необходимая
для изготовления, сборки, монтажа отдельных агрегатов, систем и всего самолета в
целом. Определяется напряженное состояние и запасы прочности элементов
конструкции. Составляются таблицы соответствия параметров самолета НЛ 1.
Проводятся статические, динамические и ресурсные испытания конструкции,
стендовые испытания систем оборудования и управления. Рабочее проектирование
заканчивается изготовлением опытных образцов, их наземными и летными
испытаниями.
Для первых вылетов должно быть получено разрешение на методическом
совете в Летно-исследовательском институте им. М.М.Громова (ЛИИ». В числе
необходимых материалов разработчиком должны быть представлено заключение
ЦАГИ по аэродинамике, устойчивости, управляемости, прочности и системе
управления.
Необходимо еще раз отметить итерационность процесса проектирования. На
каждом этапе проводится уточнение характеристик самолета, их соответствие ТЗ я
НЛГ. Учитывая, что затраты на разработку самолета на каждом последующем этапе
возрастают по отношению к предшествующему в 5-10 раз, попытки сокращения
этапов могут привести к увеличению сроков и затрат на разработку. С точки зрения
повышения качества целесообразно прорабатывать альтернативные варианты
проектных решений с целью выбора лучшего для последующей проработки.
Конкретные объемы расчетных и экспериментальных работ существенно
зависят от особенностей компоновки самолета и степени ее изученности. Поэтому,
использование нетрадиционных аэродинамических схем должно быть строго
обосновано с точки зрения соотношения улучшения характеристик проектируемого
ЛА и увеличения затрат на исследования.
www.vokb-la.spb.ru
15
II. МЕТОДИКА АЭРОДИНАМИЧЕСКОГО ПРОЕКТИРОВАНИЯ
САМОЛЕТОВ АОН
Разработка компоновок самолетов общего назначения в настоящее время ба-
зируется на последних достижениях в области аэродинамики и авиационной техни-
ки. В ЦАГИ разработана и успешно применяется мегодика аэродинамического
проектирования самолетов, основанная на использовании современных методов
вычислительной аэродинамики и результатов экспериментальных исследований
моделей в аэродинамических трубах. Эта методика позволяет удовлетворить основ-
ным требованиям безопасности полета и экономности. Основные этапы аэродина-
мического проектирования показаны на рис 2.1.
Аэродинамическое проектирование самолетов общего назначения
Рис.2.1
2.1 Аэродинамическое проектирование с использованием численных
методов
Аэродинамическое проектирование начинается с выбора основных парамет-
ров компоновки. С этой целью могут быть использованы как статистические дан-
ные по самолетам аналогичного назначения, так результаты широко применяемого
в последнее время метода оптимального проектирования, основанного на сравне-
нии и оценке различных вариантов компоновки с помощью ЭВМ.
Учитывая особенности процесса аэродинамического проектирования, заклю-
чающегося в многократном повторении отдельных этапов на различных уровнях
сложности и детализации, обычно выделяют следующие два требования к исполь-
зуемым методам расчета: во-первых, с целью получения достоверных результатов
расчетные мегоды должны учитывать все существенные особенности рассматривае-
мой компоновки и рассчитываемого течения, во-вторых, расчет не должен требо-
вав больших временных затрат.
16
Для самолетов общего назначения этим требованиям удовлетворяю? мсгоды
расчета, приведенные в таблице 2,1,
hfe Наименование метода Область применения
1 Расчет обтекания профиля cv = 0-1,0, Re > 1 106
2 Расчет сУй^ профиля М < Мкр; Re >106
3 Расчет сУми профиля с механизацией М < Мкр. Re >1 106
4 Расчет обтекания изолированного крыла су = 0-1,0; Re >1 106
5 Расчет обтекания компоновки с ис- пользованием теории тонкой несущей поверхности линейный диапазон изменения характеристик; М < Мкр
6 Расчет обтекания компоновки с ис- пользованием панельных методов Су= 0-1,0; Re >1Ю6
7 Расчет АДХ дозвуковых самолетов в широком диапазоне углов атаки мето- дом деформируемой несущей поверх- ности м < мкр; Re >1 106
Табл, 2 1
www. vokb-la. spb.ru
17
Ниже дано краткое описание приведенных выше методов расчета с иллюст
раннем их применения в виде результатов, полученных на этапе проработки техни-
ческого предложения нескольких легких само тегов Полное описание методов рас-
чета и их возможностей можно найти в работах (1-8]
Для выбора профилировки крыла может быть использован метод расчета об
текания профиля с учетом вязкое!и в рамках модели пограничного слоя |1] В ос-
нову этого и большен части остальных мегодов расчета положен "зональный" под-
ход, согласно которому течение около профиля разбивается на две зоны нсвязкую
и вязкую Невязкая зона течения описывается потным уравнением для потенциала
скорости, пограничным слои в вязкой зоне рассчитывается с помощью интеграль-
ных методов Расчет невязкого течения и пограничного слоя повторяется в итера-
ционном цикле до достижения согласованности между распределением давления на
внешней границе "эффективного" контура и толщиной вытеснения пограничного
слоя На рис 2 2 показано сравнение результатов расчета обтекания грех крыловых
профилей одного классического типа (П-20-15М4) и двух с задним нагружением
(П-301-15 и GA(W)-l) Расчеты выполнены для фиксированно!о значения коэф
фициента подъемной силы (су = 0,4) и значения числа Рейнольдса (Re ^0,9 106),
соответствующе! о условиям испытании большинства моделей в АДТ
Помимо малого сопро-
тивления на расчетном значе-
нии су крейсерского полета,
профили для самолетов общего
назначения должны об гадать
достаточным уровнем коэффи-
циента максимальной подъем-
ной силы с убранной и выпу-
щенной механизацией
Для расчета cv^ изо 1И-
рованного профиля применя-
ются приближенные методы
расчета |2,3| с моделированием
развитого диффузорного отрыва
в виде замкнутой срывной зо-
ны. Расчет внешнего потенци-
ального обтекания осуществля-
ется с использованием поверх-
ностного распределения вихре-
вых особенностей Форма от-
рывной зоны определяется ите-
рационным путем на основании
ряда эмпирических условий,
одним из которых является по-
стоянство давления на профиле
от точки отрыва до задней
кромки профиля На рис 2 3-
2 4 показано сравнение резуль-
татов расчета распределения
давления и суммарных характе-
ристик профилей серии GA(W)
с экспериментальными данны-
ми, взятыми из работ [13,14]
18
Влияние числа Рейнольдса на расчетные и экспериментальные значения
су профиля (jA(W)-I ( с =17%) дано на рис 2 5
Реальное течение около профиля с механизацией, как правило характер»! ду-
ется наличием отрывных зон на одном или нескольких элементах разрезного про-
филя, протяженность которых зависит от выбора параметров механизации и режи
ма обтекания (чисел Re и М, положения точки перехода ламинарного стоя в турбу-
лентный) Расчет обтекания профиля с механизацией может быть выполнен с ис-
пользованием приближенного метода {3] В этом методе , так же как и в методах
расчета cv изолированного профиля, отрыв на элементах разрезного профиля
моделируется замкнутой срывнои зоной, форма которой определяется итерацион-
ным путем В качестве примера на рис 2 6 показано сравнение расчетных и
Рис. 2 5 Рис 2 6
www.wkb-la.spb.ru
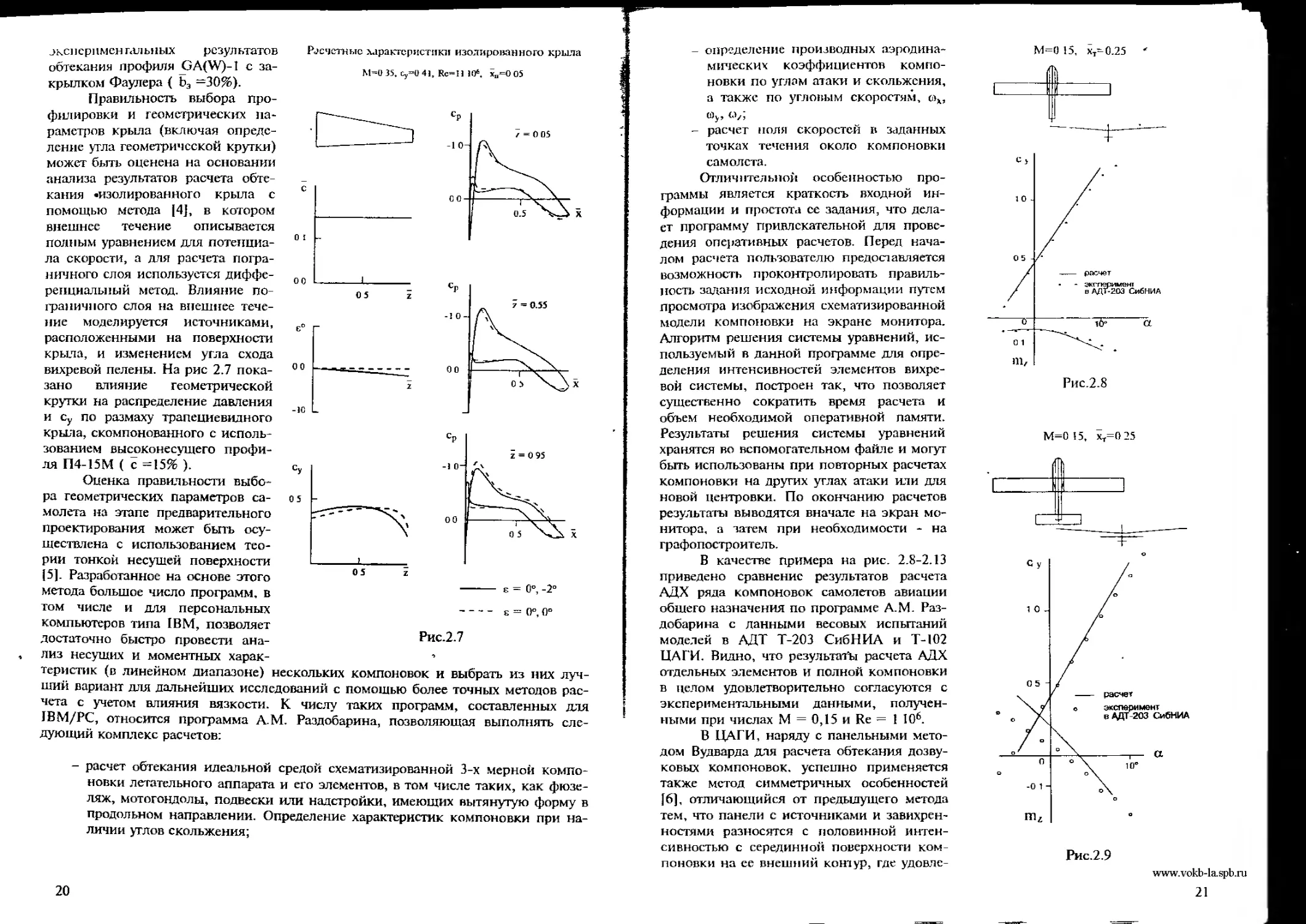
экспсрпмен гальпых результатов
обтекания профиля GA(W)-1 с за-
крылком Фаулера ( Ьэ =30%).
Правильность выбора про-
филировки и геометрических па-
раметров крыла (включая опреде-
ление угла геометрической крутки)
может быть оценена на основании
анализа результатов расчета обте-
кания «изолированного крыла с
помощью метода |4], в котором
внешнее течение описывается
полным уравнением для потенциа-
ла скорости, а для расчета погра-
ничного слоя используется диффе-
ренциальный метод. Влияние по-
граничного слоя на внешнее тече-
ние моделируется источниками,
расположенными на поверхности
крыла, и изменением угла схода
вихревой пелены. На рис 2.7 пока-
зано влияние геометрической
крутки на распределение давления
и су по размаху трапециевидного
крыла, скомпонованного с исполь-
зованием высоконесущего профи-
ля П4-15М ( с =15%').
Оценка правильности выбо-
ра геометрических параметров са-
молета на этапе предварительного
проектирования может быть осу-
ществлена с использованием тео-
рии тонкой несущей поверхности
|5]. Разработанное на основе этого
метода большое число программ, в
Расчетные характеристики изолироианного крыла
М=О 35. 4=0 41, Rc= И 106. хп=0 05
том числе и для персональных ----е = о°, о°
компьютеров типа IBM, позволяет
достаточно быстро провести ана- Рис.2.7
лиз несущих и моментных харак-
теристик (в линейном диапазоне) нескольких компоновок и выбрать из них луч-
ший вариант для дальнейших исследований с помощью более точных методов рас-
чета с учетом влияния вязкости. К числу таких программ, составленных для
IBM/PC, относится программа А.М. Раздобарина, позволяющая выполнять сле-
дующий комплекс расчетов:
- расчет обтекания идеальной средой схематизированной 3-х мерной компо-
новки летательного аппарата и его элементов, в том числе таких, как фюзе-
ляж, мотогондолы, подвески или надстройки, имеющих вытянутую форму в
продольном направлении. Определение характеристик компоновки при на-
личии углов скольжения;
20
- определение производных аэродина-
мических коэффициентов компо-
новки по углам атаки и скольжения,
а также по угловым скоростям, wx,
- расчет ноля скоростей в заданных
точках течения около компоновки
самолета.
Отличительной особенностью про-
граммы является краткость входной ин-
формации и простота се задания, что дела-
ет программу привлекательной для прове-
дения оперативных расчетов. Перед нача-
лом расчета пользователю предоставляется
возможность проконтролировать правиль-
ность задания исходной информации путем
просмотра изображения схематизированной
модели компоновки на экране монитора.
Алгоритм решения системы уравнений, ис-
пользуемый в данной программе для опре-
деления интенсивностей элементов вихре-
вой системы, построен так, что позволяет
существенно сократить время расчета и
объем необходимой оперативной памяти.
Результаты решения системы уравнений
хранятся во вспомогательном файле и могут
быть использованы при повторных расчетах
компоновки на других углах атаки или для
новой центровки. По окончанию расчетов
результаты выводятся вначале на экран мо-
нитора, а затем при необходимости - на
графопостроитель.
В качестве примера на рис. 2.8-2.13
приведено сравнение результатов расчета
АДХ ряда компоновок самолетов авиации
общего назначения по программе А.М. Раз-
добарина с данными весовых испытаний
моделей в АДТ Т-203 СибНИА и Т-102
ЦАГИ. Видно, что результата расчета АДХ
отдельных элементов и полной компоновки
в целом удовлетворительно согласуются с
экспериментальными данными, получен-
ными при числах М = 0,15 и Re = 1 106.
В ЦАГИ, наряду с панельными мето-
дом Вудварда для расчета обтекания дозву-
ковых компоновок, успешно применяется
также метод симметричных особенностей
|6], отличающийся от предыдущего метода
тем, что панели с источниками и завихрен-
ностями разносятся с половинной интен-
сивностью с серединной поверхности ком-
поновки на ее внешний контур, где удовле-
Рис.2.9
www.vokb-la.spb.ru
21
Рис.2.10
М=0.15, хт=0.4
Рис.2.11
творяется условие непрот екания. Симмет-
ричное разнесение особенностей обеспечи-
вает непрерывность характеристик на задней
кромке, а линейность в распределении за-
вихренности вдоль хорды панели позволяет
автоматически выполнять условие Чаплыги-
на-Жуковского на задней кромке. Сращива-
ние решений в невязкой области течения,
рассчитываемого с помощью метода сим-
метричных особенностей, и в вязкой, рас-
считываемого с помощью упрощенной мо-
дели двумерного пограничного слоя, осуще-
ствляется итерационным путем. На рис. 2.14
показано сравнение результатов расчета
суммарных АДХ компоновки самолета-
амфибии с результатами испытаний модели
этого самолета в ЛДТ Т-102 ЦАГИ (1М=0,15;
Re = 0,75 106).
Расчет АДХ дозвуковых самолетов в
широком диапазоне углов атаки и чисел
Рейнольдса, в том числе и натурных, может
быть осуществлен с использованием метода
деформируемой несущей поверхности |7,В|,
в основу которого положено сочетание тео-
рии обтекания невязким потоком компо-
новки, моделируемой с помощью трехмер-
ной тонкой несущей поверхности, с экспе-
риментальными (расчетными) характеристи-
ками плоских сечений элементов компонов-
ки. Расчет осуществляется путем введения
нелинейных характеристик сечений
(профилей) в уравнения, описывающие об-
текание компоновки. На рис. 2.15 показано
сравнение расчетных и экспериментальных
АДХ компоновки легкого самолета в широ-
ком диапазоне углов атаки, а также влияние
числа Рейнольдса на суммарные характери-
стики компоновки.
Экспериментальные исследования моделей в
ЛДТ
Так как расчет АДХ самолета в на-
стоящее время возможен для ограниченного
числа конфигураций (в основном для крей-
серской), то для получения полного объема
характеристик проектируемого самолета, в
том числе с отклоненными механизацией и
органами управления, необходимо проведе-
ние испытаний моделей в аэродинамических
трубах. Относительно малый диапазон ско-
ростей полета большей части самолетов об-
щего назначения (Укр — 200-450 км/ч) по-
22
зволяез основную часть исиьпаннй моделей
проводить в малоскоростных трубах АДТ
Т-102, Г-ЮЗ ЦАГИ и АДТ Т-203 СибНИА.
Ниже приведено краткое описание труб
Т-102, Т-103 и возможных видов испыта-
ний в них. Полное описание, включая тех-
нические условия на проектирование и из-
готовление моделей в эти трубы, приведено
в работе 110|.
Аэродинамическая труба Т-102 - тру-
ба замкнутого типа с открытой рабочей ча-
стью длиной 4 м, выходное сечение сопла
имеет форму эллипса с горизонтальной
осью 4 м и вертикальной осью 2,33 м. Диа-
пазон рабочих скоростей составлясг от 25
до 50 м/с.
Аэродинамическая труба Т-103 - тру-
ба замкнутого типа с открытой рабочей ча-
стью длиной 3,8м. Выходное сечение сопла
такое же как и у грубы Т-102. Большинство
испытаний выполняется при скорости по-
тока 50-80 м/с.
В настоящее время в этих трубах
проводятся следующие основные виды ис-
пытаний;
- испытания на механических шести-
компонентных весах без экрана и
вблизи экрана (моделирование бли-
зости земли на взлетно-посадочных
режимах);
- исследования на распределение дав-
ления;
- исследование спектров течения с по-
мощью нитей, растекающихся то-
чек, жидкой пленки, лазерного но-
жа и др.
- исследование скоса и торможения
потока;
- испытания по определению враща-
тельных производных;
- испытания с моделированием работы
винтовых и реактивных двигателей;
- измерение шарнирных моментов ор-
ганов управления и механизации с
помощью тензовесов.
Размеры моделей, предназначенных
ДЛЯ испытаний на механических весах, не
Должны превышать следующих величин:
площадь крыла - 0,8 м2 ;
размах - 2,5 м;
габаритная длина модели-2,5м;
диаметр фюзеляжа - 0,4 м.
В качестве иллюстрации на рис.2.16
Изолированным фюзеляж транспор ню nt самолпа .
Рис.2.12
23
приведены фотографии моделей двух
самолетов общего назначения в аэро-
динамических трубах Т-102 и Т-103
ЦАГИ
2.2 Аэродинамическое проектиро-
вание крыла
Важное шачение в обеспечении
безопасности и экономичности полета
самолетов общего назначения играет
разработка крыла с высоким уровнем
АДХ как в крейсерском полете, так и
на взлетно-посадочных режимах От-
сутствие по конструктивным сообра
жениям у большинства самолетов это-
го класса механизации передней
кромки привето к тому, что выбор
площади крыла и типа закрылков
осуществляется из условии обеспече-
ния требуемых взлетно-посадочных
характеристик, а для однодвигатель-
ных самолетов удовлетворения также
ограничению по скорости сваливания
(Vc < 113 км/ч, АП-23) Такой подход
к выбору параметров крыла часто
Рючст аэро in пампасских харам сриыик само 1с и
М=0 15, Кс=О 75 Ю6, х,=0 25
Г”
пн
Рис 2 15
24
приводит к тому, что режим крейсерского
полета осуществляется при значениях ко-
эффициента подъемной силы, мень-
ших суК Поэтому одновременное обес-
печение высокого уровня АДХ в крейсер-
ском полеге и на взлетно-посадочных ре-
жимах требует комплексного подхода к
выбору профилировки крыла и проект
рованию механизации
Процесс проектирования крыла
обычно начинается с выбора основных
геометрических параметров площади (S)
и удлинения (X) крыла С этой целью
проводятся параметрические расчеты, в
которых рассматривался влияние на ха-
рактеристики самолета изменения площа-
ди крыла, его удлинения и взлетною веса
Каждому сочетанию параметров S и X, с
одной стороны, соответствует определен-
ное значение веса топлива, располагаемо-
го в крыле, а с другой стороны - измене-
ние площади и удлинения крыла приво-
дит к изменению аэродинамических и
летных характеристик самолета Исходя из
заданной дальности полета и равенства
потребного и располагаемого веса топли-
М одель легкого мног оцслсвого самолета в 1 102
Модель самолета амфибии в T 103
Рис 2 16
ва, устанавливается зависимость между параметрами крыла и летными характери-
стиками Такая процедура обычно характерна для стадии разработки технического
предложения на проектируемый самолет В дальнейшем процесс проектирования
сводится, в основном, к выбору профилировки и разработке механизации крыла,
обеспечивающих необходимый уровень АДХ Последний этап является наиболее
типичным для аэродинамического проектирования крыла с использованием чис-
ленных методов вычислительной аэродинамики
2.2.1 Выбор профилировки крыла
Для профилировки крыла самолетов общего назначения используются как
профили классического типа, разработанные в 40-60х годах [11,12], так и новые
профили [15], в том числе с задним нагружением [13,14] Выбор того или иного
профиля, как правило, обусловлен требованиями, предъявляемыми к конкретному
самолету (назначение, основные режимы полета и т д ) Так как большинство само-
летов этого класса имеет малую удельную нагрузку на крыло (G/S <150 кг/м2), то
расчетное значение коэффициента подъемной силы в крейсерском полете
(VKp < 400 км/ч) обычно находится в диапазоне су = 0,3-0,5 Поэтому одним из
первых требований к профилировке крыла самолетов общего назначения является
обеспечение малого сопротивления, начиная с су 0,3 Следующим требованием
является обеспечение значения су^ профиля не менее 1,6, поскольку для увеличе-
ния подъемной силы крыла на режимах взлета и посадки используется, в
основном, механизация задней кромки Кроме этих требований, существует еще
ряд ограничений по значениям критического у1ла атаки и характеру протекания
зависимости су= f(a) в области больших углов атаки, по значению коэффищ^д^.^ spb_га
продольного момента при су = 0
25
Крыловые профили для самолётов АОН
М=0.15 (расчет); Хг=0.25
ПЗ-15 (С-155t, ftM,
Рис.2.17
В ЦАГИ разрабошны высоконесущие профили для самолетов АОН, характе-
ризующиеся передними положениями максимальной толщины, вогнутости и спе-
циальной профилировкой носка.
Для ознакомления с характеристиками малоскоростных профилей для само-
летов общего назначения ниже дан сравнительный анализ результатов расчетных и
экспериментальных исследований ряда профилей (рис. 2.17) классического типа
(PIII, ПЗ-15) и с задним нагружением (GA(W)-1, П-301-15, П4-15М, ПЗ-15М6,
УЛ-13). За исключением профилей GA(W)-I и УЛ-13, имеющих относительную
толщину 17% и 13% соответственно, толщина остальных профилей составляет
с = 15%.
На рис. 2.17 приведены результаты расчета распределения давления (М=0,15,
Re 1-106) при значениях Су близких к расчетным для рассматриваемых профилей.
Расчеты проведены с использованием метода |1|. Видно, что имеющиеся различия
в геометрии профилей находят свое отражение в характере распределения давления.
Гак, у профилей классического типа (ПЗ-15) большая часть аэродинамической на-
грузки приходится на переднюю часть профилей, в то время как у профилей с зад-
ним нагружением перераспределяется на хвостовую часть. Этим, в частности, обу-
словлены большие значения моментов на пикирование (mZo) у профилей с задним
нагружением.
Как отмечалось ранее, к числу основных требований, предъявляемых к про-
филям крыльев самолетов общего назначения, относится также условие обеспече-
ния высокого значения су^. На рис. 2.17 приведены расчетные характеристики
профилей |3| на больших углах атаки, включая влияние числа Re на значения cymit
11 Ккр- Видно, что большая часть рассматриваемых профилей имеет достаточно вы-
сокий уровень значений су^ (су^-- 1 >9-2,1; Re =3 106) и умеренные величины
коэффициента продольного момента.
26
Величина Мкр профилей для самолетов общего назначения, определяемая
как отношение dCx/dM = 0,1, составляет 0,54 0,72 в зависимости от расчетного
значения су конкретного профиля.
Испытания профилей в трансзвуковой аэродинамической трубе Т-106 ЦАГИ
на моделях прямоугольных крыльев с удлинением X - 5 дают результаты, качест-
венно согласующиеся с расчетом, однако, величины су в этом случае на 15-20%
ниже расчетных (рис. 2.18).
Экспериментальные характеристики малоскоростных профилей
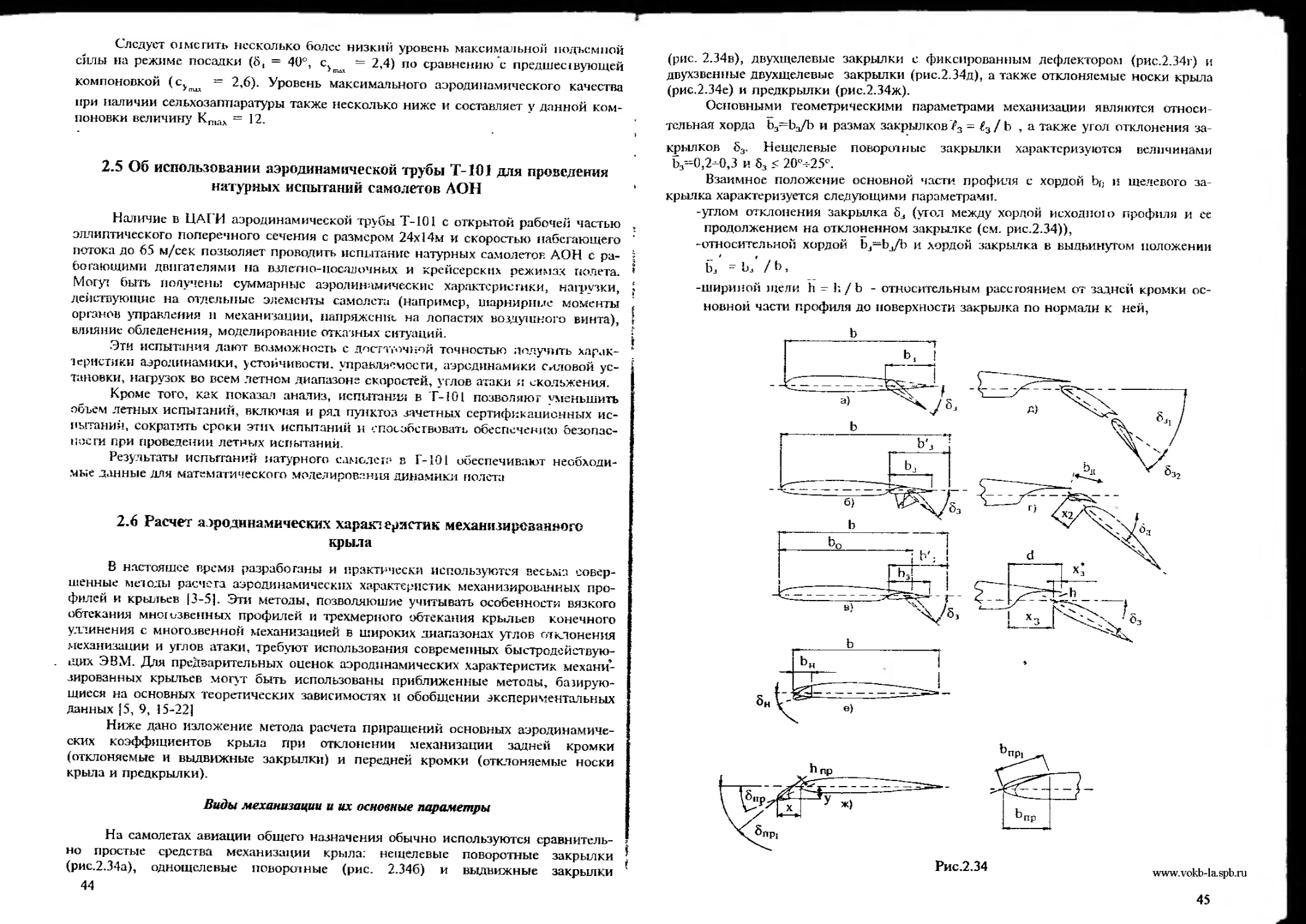
2.2.2 Механизация крыла
Для увеличения подъемной силы крыла на режимах взлета и посадки, а так-
же для удовлетворения требования АП-23 по скорости сваливания для однодвига-
Необходимые значения Су „„ самолетов АОН
Рис.2.19
тельных самолетов (Vc < 113 км/ч), приме-
няется механизация крыла в виде щитков,
бесшелевых и щелевых закрылков. На рис.
2.19 показана зависимость между удельной
нагрузкой на крыло (G/S) и потребным сба-
лансированным значением супм1 самолета,
удовлетворяющая требованию АП-23 (Н =0;
MCA) по скорости сваливания.
К настоящему времени в отечествен-
ной и зарубежной литературе опубликовано
большое число работ с результатами иссле-
дований механизации на различных профи -
ЛЯХ И крыльях. Эти работы nocBHHjeWMvd4iU4a.spb.ru
27
дсзальномх анализу выбора параметров механизации 117,18], так и носят.обобщен-
ный характер J11,16,19-21].
На рис. 2.20-2.22 приведены некоторые результаты экспериментальных ис-
следований |Н] на профилях трех наиболее распространенных вариантов механи-
зации задней кромки, использующих, в основном, эффект увеличения кривизны
профиля.
Одним из наиболее простых устройств для увеличения подъемной силы про-
филя является щиток, представляющий собой плоскую плащ ину, крепящуюся
шарнирно со стороны нижней поверхности На рис. 2.20 показано влияние толщи-
ны профиля па величину сУт^ профилей серии NACA 230 с убранным и отклонен-
ным щитком
Угол отклонения выбирался из условия получения максимального значения
профиля с отклоненным щитком Видно, что с увеличением толшины профи-
лей возрастает эффективность щитка в качестве механизации задней кромки. Оп-
тимальный размер хорды щитка также имеет тенденцию к росту с увеличением от-
носительной толщины профиля. Так, если для профиля NACA 23012 ( с -12%) -
bJlw, = 30%, то для профиля NACA 23030 ( с =30%) - ЬШор. = 40% (рис. 2.20) На
рис. 2.20 показана также огибающая поляр для профиля NACA 23012 с 20% щит-
ком, угол отклонения которого выбирался из условия обеспечения cxmm при каждом
значении су.
28
Близкие к щитку величины приращен,ия > могут быгь получены в случае
применения простого бесщелевого закрылка, представляющего собой поворотную
хвостовую часть крыла, отклоняемую вниз (рис. 2.21). Для получения максимально-
го значения сУ м необходимо герметизировать щель между крылом и закрылком.
Наличие небольшой щели ( Бщ = 0,32%) может привести к снижению эффективно-
сти простого закрылка, вследствие неблаюприягного влияния выдува воздуха на
верхнюю поверхность крыла через ^профилированную щель (рис 2.21) Величина
приращения сУгт для профиля с простым закрылком слабо зависит от числа Рей-
нольдса (рис.2.21 ). Основное влияние числа Re сводится к увеличению су про-
филя с убранной механизацией. Экспериментальные значения нагрузок (сп) и шар-
нирных моментов (шш), действующих на простой закрылок при нулевом угле атаки
показаны, на рис. 2.21.
Наиболее эффективной является щелевая механизация. Профилированные
специальным образом щели обеспечивают перетекание воздуха с нижней поверхно-
сти на верхнюю и улучшают характер обтекания закрылка и крыла. В зависимости
от количества щелей закрылки делятся на одно- и мноющелевые На самолетах
общего назначения обычно применяю гея однощелевые закрылки. Отклонение за-
Рис.2.21
www. vokb^aj spb.ru
крылков в рабочие ^положения осуществляется либо путем просюго поворота во7
крут фиксированном оси вращения, либо сочетанием выдвижения и поворота. На
рис. 2.22 приведены экспериментальные значения сута1 профиля NACA 23012 с тре-
мя вариантами щелевого закрылка, отличающимися, в основном, размером хорды
основной части профиля и, соответственно, величиной выдвижения закрылка
Видно, что с увеличением выдвижения закрылка возрастает величина приращения
с>ти, достшая значения 1,75 для 30% закрылка Фаулера. Огибающая поляр для раз-
ных углов отклонения закрылка на профиле NACA 23012 показана на рис. 2.22.
Видно, что при одинаковых значениях су механизация с большим выдвижением
закрылка вносит меньший вклад в увеличение сопротивления профиля.
Приведенные на рис. 2.20-2.22 экспери.мен зальные значения приращений
cv для механизации задней кромки позволяют сделать выбор механизации кры-
ла, обеспечивающей выполнение тактико-технических требований (ТТТ) и требо-
вания ЛП-23 по скорости сваливания. Дальнейшее проектирование механизации,
связанное с выбором профилировки и определением оптимального положения.
Однощелевой закрылок (профиль NACA 23012)
Координаты механизации для профиля РШ
N Хв.п,% Ув.л,% Хн.п,% Уя.п,%
1 0,000 0,000 ' 0,000 0,000
2 0,100 0,955 0,100 -0,549
3 0,250 1,577 0,250 -0,802
4 0,500 2,300 0,500 -1,062
5 1,000 3,300 1,000 -1,450
6 2,000 4,846 2.000 -1,950
7 3,000 6.000 3,000 -2,231
8 5.000 7,750 5,000 -2.631
9 7.500 9,317 7,500 -2,949
10 10,000 10,400 10,000 -3,119
11 15,000 11,700 20,000 -3,312
12 20,000 12,181 30,000 -3,262
13 25,000 12,181 40,000 -3,081
14 30,000 11,923 50,000 -2,738
15 35,000 11,489 60,000 -2.300
16 40,000 10,912 61,000 -2.205
17 45,000 10,203 62,000 -1,845
18 50,000 9.400 63.000 -1.127
19 55,000 8,524 64,000 -0,006
20 bO.OOO 7,600 65,000 1,220
21 65,000 6,657 67,000 2,913
22 70,000 5,700 69,000 3,906
23 72.000 5,319 71,000 4.474
24 74,000 4,940 73,000 4.728
25 74.600 4.826 74,000 4,751
26 74.600 4.733
Табл.2.2 Основной профиль (РШ)
N Хв.п,% Ув.п,% Хн.П,% Ун.п,%
1 64.300 -0,750 64,300 -0.750
2 64,400 -0,050 64.400 -1,200
3 64,600 0.391 64,600 -1.516
4 64,800 0.713 64,800 -1.692
5 65,000 0,988 65.000 -1.810
6 66,000 2,028 66.000 -2.009
7 68,000 3,326 68.000 -1.906
8 70.000 4,083 70,000 -1.800
9 72.000 4,487 75,000 -1,517
10 74,000 4,601 80,000 -1,219
11 74,600 4,583 85.000 -0.918
12 75,000 4,559 90,000 -0.612
13 77,000 4.320 95.000 -0,333
14 80,000 3,800 97.000 -0.229
15 85,000 2.851 100,000 -0.077
16 90.000 1,900
17 95.000 0,978
18 97,000 0,616
L 19 100,000 0,077
Табл.2.3 Закрылок (РШ) / Ь3 =35,7%
www. vokb-la. spb.ru
33
Координаты щелевой механизации для профиля П-20-15М4
N Хв.п.% Ув.п,% Хн.п,% Ун п,%
1 0,000 0,000 0,000 0,000
2 0,100 0,670 0,100 -0,465
3 6,250 1,020 0,250 -0,717
4 0,500 Г 1,425 0.500 -0,993
5 1,000 2,006 1,000 -1.390
6 2,000 2,850 2,000 -1.921
7 3,000 3,516 3,000 -2,288
8 5,000 4,583 4,750 -2,781
9 7,500 5.607 4,500 -2,648
10 8,354 5,904 4,300 -2.454
11 10,000 6,420 4,200 -2,310
12 12,150 6.995 4,000 -1.873
13 15,000 7,629 3,900 -1.248
14 4,000 -0.503
15 4.200 0,068
16 4,300 0,280
17‘ 4.500 0.640
18 4,750 1,018
19 5.000 1,351
20 6,000 2,443
21 8.000 4,031
22 10,000 5,219
23 12,000 6.193
24 15.000 7.500
Табл.2.4 Предкрылок (П-20-15М4) / Ьпр—15%
N Хв л.% Ув.п.% Хн.л.% Ун п.'ё
1 65.134 -2.488 65,134 -2,488
2 65.203 -1,996 65,190 -2,815
3 65.502 -1,409 65.273 -3.015
4 66,046 -0.807 65,390 -3,195
5 66,676 -0.314 65,507 -3,310
6 67,361 0.110 65,642 -3,283
7 68,087 0.482 65.878 -3,423
8 68.843 0,818 66,261 -3.326
9 69.619 1.126 66.712 -2,929
10 70,413 1,413 67,111 -2,146
11 71.223 1,681 67,547 -1,408
12 71,632 1,809 68,057 -0,765
13 68,627 -0,197
14 69,242 0,315
15 69,896 0,778
16 70.586 1,196
17 71,305 1.578
18 71,671 1,760
Табл.2.5 Дефлектор (П-20-15М4)
34
N Хв.п,% Ув.п,% Хн.п,% Ун.п,%
4,000 -1,200 4,000 -1,200
2 4,200 -0,195 4,200 -2,130
3 4,300 0,051 4,300 -2,300
4 4,500 0,452 4,500 -2,536
5 4,750 0,858 4,750 -2,725
6 5,000 1,206 5,000 -2,842
7 6,000 2,310 7,500 -3,377
8 8,000 3,881 10,000 -3,803
9 10,000 5,063 15,000 -4,405
10 12,000 6,065 20,000 -4,791
11 15,000 7,355 25,000 -5,053
12 17,500 8,073 30,000 -5,226
13 18,129 8,196 35,000 -5,310
14 20,000 8,482 40,000 . -5,297
15 25,000 9,088 45,000 -5,175
16 30,000 9,486 50,000 -4.941
17 35.000 9,690 55,000 -4.607 !
18 40,000 9,699 60,000 -4.190 |
19 45,000 9,511 61.418 -4.0оС !
20 50,000 9,128 62,096 -3.997
21 55,000 8.560 62,772 -ЗЛЗЗ
22 60,000 7,836 63,446 -3,868
23 65,000 6,993 64,634 -2.320
24 70,000 6,070 65,300 -0.980
25 75.000 5,096 69,500 3,005
26 80,000 4.099 72,000 3.517
27 80.230 4,053 75,000 3.56''
28 80.700 3,958 77,500 3,620
29 80,000 3,756
30 80,700 3,800
Табл.2.6 Основной профиль (П-20-15М4)
www. vokb-la. spb.ru
35
N Хв 11.% Yb.ii,% Хн.и,% Yh.ii,%
1 70,000 -2,150 70,000 -2,150
2 70,012 -1,910 70,049 -2,418
3 70,047 -1,747 70,103 -2,541
4 70,109 -1,567 70,187 -2,653
5 70,240 -1,287 70.348 -2,795
6 70,510 -0,855 70,661 -2,958
7 70,786 -0,498 70,968 -3,044
8 71,346 0,107 71,289 -3,076
9 72,055 0,736 71,997 -3,006
10 72,771 1,265 72,699 -2,929
11 74,218 2,1 И 73,165 -2,883
12 75,681 2,737 73,396 -2,856
13 77,156 3,184 74,088 -2,783
14 78,643 3,471 75,000 -2,684
15 80,141 3,609 76,791 -2,502
16 81.649 3,602 80,000 -2,163
17 83,456 3,400 85,000 -1,639
18 85.000 3,094 90,000 -1,120
19 87,850 2,513 95,000 -0,606
20 90,000 2,082 97,000 -0,402
21 91,646 1,752 98,907 -0,207
22 93,815 1.319 99.300 -0,167
23 95,000 1,083 100,000 -0,096
24 97,000 0,686
25 98,907 0,310
26 100,000 0,096
Табл.2.7 Закрылок (П-20-15М4) / b3 =30%
i. vokb-la.spb.ru
36
2.3<Результаты экспериментальных исследований модели лёгкого само-
лета в ДДТ Т-102 ЦАГИ
В АДТ Т-102 ЦАГИ проведены весовые испытания модели легкого самолета
(бвзл = 1840-2000 кг), выполненного по нормальной схеме с низкорасположенным
Крылом (Хкр = 8,8) трапециевидной формы в плане и хвостовым оперением. Само-
лет предназначен для перевозки пассажиров (до 5 человек) на высоте Н = Зкм с
крейсерской скоростью 270 км/ч. Силовая установка состоит из одного поршневого
двигателя мощностью 260 л .с., установленного в носовой части фюзеляжа.
На рис. 2.26 показана схема модели самолета, изготовленного в масштабе 1:5
по отношению к натуральному образцу. Испытания проведены на механических
весах при скорости потока V = 50 м/с (Re = 0,93-106). Угол атаки отсчитывался от
строительной горизонтали фюзеляжа (СГФ).
Рис.2.26
Конструкция модели состоит из следующих основных элементов:
- Крыло трапециевидной формы в плане имеет угол заклинения 3° и угол V-
образности, равный 5°. В компоновке крыла по всему размаху установлен
маломоментный профиль (|mzB|= 0,025) классического типа ПЗ-15 с относи-
тельной толщиной с =15%. Крыло имеет геометрическую крутку по разма-
ху. Для увеличения подъемной силы крыла на режимах взлета и посадки
выполнена двухщелевая механизация задней кромки в виде закрылка с фик-
сированным дефлектором (рис. 2.27). Относительная хорда механизации со-
ставляет Ь3 =30%, размах - 0,58 ^кр- Выдвижение механизации в рабочие
37
наложения осуществляется путем поворота вокруг фиксированной оси вра-
щения. В концевой части крыла "расположен элерон с хордой Ъ3 =30%
(?э = 0,25).
- Хвостовое оперение состоит из вертикального оперения и стабилизатора, ус-
тановленного на киле. Хвостового оперение скомпоновано из симметрично-
го профиля С-Пс-10 ( с =10%). .
- Фюзеляж модели имеет разьемы в местах расположения кабины и хвостового
оперения. Блатодаря этому доспи аегся определенная универсальность при
моделировании различных вариантов силовой установки и оперения.
- Шасси трехстоечное, съемное.
На рис. 2.28 приведены основные аэродинамические характеристики модели
(су, mz = f(a); К, m, Г(су)) для крейсерской и взлетно-посадочной конфигураций.
Видно, что в трубных условиях (Re =0,93-Ю6) получен достаточно высокий уровень
АДХ. Так, для крейсерского значения су=0,3 величина аэродинамического качест-
ва, равна 11,6 единицы, при КП1;1Х =17,5. Линейность в поведении зависимостей
cv = f(ct) и mz =f(cy) сохраняется в диапазоне значений су = -0,6ч-1,25. Эксперимен-
тальное значение суяих близко к расчетному для профиля ПЗ-15 при Ke—1-Ю6. На
режиме взлета (53=20°) величина аэродинамического качества модели с выпушен-
ным шасси составляет 10,6 единицы, а су равно 1,86. Для режима посадки полу-
чено значение = 2,27 (53 =50°). С учетом ожидаемого увеличения су^ в на-
турных условиях (ДсУт11 = 0,2; Re = 3,5-106) величина коэффициента максимальной
подъемной силы составит 2,47.
Результаты испытаний модели в продольном канале без горизонтального
оперения показаны на рис. 2.29.
ось вращения закрылка
поворотная створка
Механизация крыла (профиль ПЗ-15)
Рис.2.27
38
M=O.tb; Re=0.93*W: Хт=0.25
Рис.2.28
2.4 Аэродинамическое проектирование средних
сельскохозяйственных самолетов
На облик сельскохозяйственных самолетов существенное влияние оказывают
условия их эксплуатации. Сельскохозяйственные работы могут выполнять как мно-
гоцелевые самолеты, снабженные сельскохозяйственным оборудованием, так и са-
молеты, специально созданные для выполнения сельскохозяйственных paboi
Сельскохозяйственные самолеты делятся на три категории тяжелые, средние,
легкие.
В данном разделе РДК будут рассмотрены средние сельскохозяйственные са-
молсты со взлетной массой то ~ 2000 кг, способные взять на борт 700 - 900 К! хи-
микатов разнообразно! о вида, предназначенных для обработки сельскохозяйствен-
ных полей и лесных угодий.
Максимальная отдана по целевой нагрузке (химикаты) и максимальная эф-
фективность производимых сельскохозяйствен я ы> работ получается при ссыдзнии
специализированного сельскохозяйственною самолета (тхим/шо = 0,35*0,40 по
сравнению с переоборудованными и мноюцелевыми самолетами, тчим/1По -
0,23 -0,30).
Средний сельскохозяйственный самолет должен быть прост по конструкции,
технологичен в изготовлении, безопасен и удобен в эксплуатации. Рабочие колеты
его проходят на малой высоте от земли (h=2^3 м) с малой скоростью
(Ур<1б=120-140км/ч). Такой самолет должен быть легко управляемым и обладать
достаточной маневренностью при быстрых разворотах над обрабатываемым полем.
Ввиду токсичности используемых химикатов кабина пилота должна быть
герметизирована. С целью равномерной и качественной химическом обработки по-
тей и лесных угодий самолет предпочтительно проектировать в нормальной схеме с
низким расположением крыла, на котором устанавливается специализированное
сепьхозоборудование минимально возможного аэродинамического сопротивления.
Самолет подобного типа с неубирающимся шасси должен эксплуатироваться
с достаточно короткой грунтовой полосы iLan-r = 300 - 400 м), что требует высоких
значений максимальной подъемной силы ' cv ]и - 2.4) В крейсерском полете такой
самолет должен обладать достаточно большой скоростью (VKp = 200 250 км/ч без
сельхозаппаратуры и химикатов) и большой перегоночной дальностью (L-I000 км).
При наличии химикатов должна быть обеспечена перегоночная дальность до L -
500 км
Двигатель (предпочтительно один) у среднего ссльскохозяйственого самолета
(поршневого, роторно-поршневого типа или ТВД) должен иметь удельную мощ-
ность не ниже N=Nlc/nio = 0,16 4 0,20 и обладать высоким ресурсом в сложных
услбвиях эксплуатации.
Крыло Форма крыла в плане может быть прямоугольной или трапециевид-
ной с малым углом стреловидности по передней кромке (хпк < 10°). С целью упро-
щения технологии изготовления крыло проектируется, как правило, из одного про-
филя по всему размаху. Допускается небольшая геометрическая крутка вдоль раз-
маха крыла (е = -2° -г -3° при z = 1,0) с целью улучшения несущих свойств и ос-
лабления отрывных явлений в концевой части крыла (в области расположения эле-
ронов) на больших углах атаки.
Размах крыла рекомендуется выбирать в пределах ^кр = 13 - 15 мс целью
достаточно большого захвата обслуживаемой площади обрабатываемого поля.
Удлинение крыла целесообразно принимать порядка X = 8 - 8,5 с целью
обеспечения достаточной маневренности на режимах разворота и нерасчетных ре-
жимах. Рекомендуемое сужение трапециевидного крыла ц — 1,5 + 2.
40
Угол поперечного V (4° 5°) необходим для улучшения поперечном устоичи-
рости и предотвращения касания земли при полете на предельно малых высотах
Угол установки крыла относительно линии СГФ, <pJLI = Г т 3й, рекомендует-
ся для уменьшения утла атаки фюзеляжа с целью минимизации его сопротивления
и улучшения обзора.
Профиль крыла Рекомендуется классического и сверхкритического типов с
максимальной относительной толщиной ( с ) в пределах с = (15 17)%. Такая от-
носительная юшцина необходима для получения полезного обьем. целью разме-
щения требуемого запаса топлива, для получения приемлемых аэродинамических
характеристик, для удовлетворения требованиям статической и динамической
прочности, уменьшения массы конструкции.
Ввиду полета на предельно малых высотах относительно 'емли (h = 2 5 м),
профиль крыла такого самолета должен быть высоконесушим с у ров» см макси-
мальной подъемной силой с 1.8 - 2,0, реализуемой ».з углах атаки
акр>(16е^ 17°).
Для обеспечения безопасного полета на больших угла* зчь зависимость
с, = f (а) должна иметь плавный хара/гер ь области о = ал11 ьо всех» полетном диа-
пазоне чисел Рейнольдса.
С целью увеличения аэрсдпна'4ч«сского качества s ри повыше иных значени-
ях коэффициента подъемной силы (с, ? 0.5) целесообразна установка на крыльях
вертикальных концевых поверхностей малой относительной площади
( = SB31C/S = 0,02-0,03)
Механизация крыла сельскохозяйственного самолета должна быть достаточно
простой и эффективной. Рекомендуется использование однозвенных шелевых за-
крылков относительной хорды Ь3 = Ь/о =0,30^0.35 и относительного размаха
73=(0,5-0,6) с выдвижением не менее (10%*!5%) хорды и максимальными углами
отклонения (на режиме посадки; 63 = 35с-40° В этом случае можно получить при-
рост подъемной силы при нулевом угле атаки Дсуо = Acjn -Лсу5 }= 0.8 - 1,0 и
добиться величины су = 2,4 2,6 на сбалансированном режиме. С целью улуч-
шения аэродинамических характеристик. и характеристик поперечной управляемо-
сти на больших углах атаки можно а с пользовать предкрылок в концевой части
крыла (в области элерона)
Фюзеляж. С целью минимизации потери аэродинамического качества при
балансировке самолета реком е нпустсл удлинение фюзеляжа klt)=-{b/d>6 Обводы
должны быть достаточно плавными с минимально возможным диффузором в хво-
стовой части (углы наклона поверхности <Э « 10° * 13"). Кабина пи юта. обеспечи-
вающая широкую панораму обзора, должна быть герметичном ввиду »оксичности
распыляемых химикатов.
В месте сочленения крыла с фюзеляжем необходимо сбесче"итг максимально
возможную плавность обводов с целью предотвращения местных отрывов потока,
существенно снижающих аэродинамическое качество самолета.
Горизонтальное оперение (ГО) целесообразно располагать выше плоскости
крыла. Удлинение рекомендуется выбирать в пределах л. = 4 - 4,5. С целью обеспе-
чения устойчивости и управляемости самолета относительная площадь горизон-
тального оперения из условий балансировки самолета состав.гяет не ме-
нее Sro = Sfo/S = 0,20-0,25, а коэффициент статического момента этой плошали
находится в пределах = 0,55-0,60.
Для уменьшения потерь на балансировку рекомендуется устанавливать гори-
зонтальное оперение относительно линии СГФ на угол <рП1 = -2° - -3е. Профиль
горизонтального оперения, как правило, симметричный с передним положением
www. vokb-la. spb.ru
41
максимальной относительной толщины
хс = 0,25 т 0,3, величина с1и = (0,1 -
0,12).
Руль высоты располагается по
всему размаху горизонтального опере-
ния Хорда ею составляем как правило,
не менее 30% хорды горизонтального
оперения
Вертикальное оперение (ВО) име-
ем как правило, стреловидную перед-
нюю кромку (/пк = 30° - 45°), ино1да с
изломом на стыке с горгротом. Удлине-
ние его составляет = 1,2 - 1,4, отно-
сительная площадь Sw = SIM)/S = 0,1 -
0,14, а статический момент площади В|Ю
= 0,03 - 0,05 Профиль киля симметрич-
ный с передним положением макси-
мальной отиосительнои_ толщины
( х^О,25-0,3), величина сво = (0,09 -
0,12).
Руль направления (PH), распро-
страненный по высоте киля, имеет отно-
сительную площадь не менее
Spii — Spu/Sno — 0,3 - 0,4.
На основе вышеизложенных
принципов аэродинамического проекти-
рования рассмотрим примеры аэродина
мического проектирования среднего
сельскохозяйственного самолета с
трапециевидным и прямоугольны и
крыльями на базе комтекса расчетных
программ, разработанных в ЦАГИ
Рассматриваемое трапециевид i юе
крыло v сужением г] 2 скомпоновано
из одного (по размаху) высоконесушего
современного профиля с максимальной
относительном толщиной с = 15%. На
рис 2 30 приведены расчетные аэроди-
намические характеристики этого про-
филя Су(ос), Су(сх), cy(mz) в плоском по-
токе при фиксированном в носке поло-
жении точки перехода ламинарного по-
граничного слоя в_турбулентный на обе-
их поверхностях ( хп = 5%).
Профиль имеет высокий уровень
коэффициента максимальной подъемной
силы (сУта* = 1,9) при большом значе-
нии критического угла атаки (оЦф = 18")
и приемлемом уровне коэффициента
момента тангажа при нулевой подъемной
силе (niZe= - 0,08).
42
На рис 2 31 представлены рас-
четные несущие характеристики для
полной компоновки самолета в крей-
серской (63 = 0) и посадочной (63 =
35°) конфигурациях на балансировоч-
ном режиме Следует отмстить высо-
кий уровень су - 2,6 при значении
акр = 20,5° в посадочной конфшура-
ции (однозвенный щелевой закрылок,
8j =35°)-
Об уровне аэродинамического
качества полной компоновки на ре-
жиме балансировки дают представле-
ние расчетные зависимости
Кблл (су бал) при натурном значении
Re - 5 Ю6 (ррс.2.32) При аэродина-
мически i падкой поверхности макси-
мальное аэродинамическое качеыво
достигает величины Ктах = 17,6 Учет
вредного сопротивления отдельных
выступов и неровностей снижает ве-
личину Ктах до уровня 16,6 Учет со-
противления шасси приводит к уров-
ню KniJX = 15.8 для полной компонов-
ки. Установка сельхо^оборудования
достаточно облагороженной формы
(штанга эллишическою сечения) при-
водит к дальнейшему снижению аэро-
динамического качества (KTOdX= 13)
Следует отметить, что у сельско-
хозяйственных самолетов величина
Крах реализуется при больших значе-
ниях су (например, суК1ПЩ= ОД"7 при
Ктах = 15,8, рис.2.32).
Ввиду очевидной простоты изго-
товления, все еще находят применение
в практике сельскохозяйственного са-
молетосгроения крылья прямоуголь-
ной формы в плане, уступающие по
весовой отдаче крыльям трапециевид-
ной формы.
На рис.2.33 в качестве иллюст-
рации приведены расчетные аэроди-
намические характеристики ( при чис-
ле Re = 5 106 ) компоновки среднего
сельскохозяйственного самолета с
крылом прямоугольной формы в пла-
не с учетом балансировки Крыло
скомпоновано из одного (вдоль разма-
ха) сверхкритического - профиля
GA(W)-1 с максимальной относитель-
ной толщиной с = 17%
Полная компоновка, трапециевидное крыло
М=0 15, Rc=5 IO6. х0=5%
Полна? компоновка.
wwwfgokb-la.spb.ru
Следует симсгить несколько более низкий уровень максимальной подъемной
сады на режиме посадки (б, = 40°, с>т^ = 2,4) по сравнению с предшесгвующей
компоновкой (с>тл = 2,6). Уровень максимального аэродинамического качества
при наличии сельхозаппаратуры также несколько ниже и составляет у данной ком-
поновки величину КП)ЛХ = 12.
2.5 Об использовании аэродинамической трубы Т-101 для проведения
натурных испытаний самолетов АОН
Наличие в ЦАГИ аэродинамической трубы Т-101 с открытой рабочей частью
эллиптического поперечного сечения с размером 24x14м и скоростью набегающего
потока до 65 м/сек позволяет проводить испытание натурных самолетов АОН с ра-
ботающими двигателями на взлетно-посадочных и крейсерских режимах полета.
Могу; быть получены суммарные аэродинамические характеристики, нагрузки,
действующие на отдельные элементы самолета (например, шарнирные моменты
органов управления п механизации, напряжение на лопастях воздушного винта),
влияние обледенения, моделирование отказных ситуаций.
Эти испытания дают возможность с достаточной точностью подучить харак-
теристики аэродинамики, устойчивости, управляемости, аэродинамики садовой ус-
тановки, нагрузок во всем летном диапазоне скоростей, углов атаки и скольжения.
Кроме того, как показал анализ, испытания в Т-101 позволяют уменьшить
объем летных испытаний, включая и ряд пунктов зачетных сертификационных ис-
пытаний., сократить сроки этих испытаний и способствовать обеспечению безопас-
ности при проведении летных испытаний.
Результаты испытаний натурного самолет:- в Г-101 обеспечивают необходи-
мые данные для математического моделирования динамики полета
2.6 Расчет аэродинамических характеристик механизированного
крыла
В настоящее время разработаны и практически используются весьма совер-
шенные методы расчета аэродинамических характеристик механизированных про-
филей и крыльев 13-5]. Эти методы, позволяющие учитывать особенности вязкого
обтекания многозвенных профилей и трехмерного обтекания крыльев конечного
удлинения с многозвенной механизацией в широких диапазонах углов отклонения
механизации и углов атаки, требуют использования современных быстродействую-
щих ЭВМ. Для предварительных оценок аэродинамических характеристик механи-
зированных крыльев могут быть использованы приближенные методы, базирую-
щиеся на основных теоретических зависимостях и обобщении экспериментальных
данных |5, 9, 15-22]
Ниже дано изложение метода расчета приращений основных аэродинамиче-
ских коэффициентов крыла при отклонении механизации задней кромки
(отклоняемые и выдвижные закрылки) и передней кромки (отклоняемые носки
крыла и предкрылки).
Виды механизации и их основные параметры
На самолетах авиации общего назначения обычно используются сравнитель-
но простые средства механизации крыла; нещелевые поворотные закрылки
(рис.2.34а), однощелевые поворотные (рис. 2.346) и выдвижные закрылки
44
(рис. 2.34в), двухщелевые закрылки е фиксированным дефлектором (рис.2.34г) и
двухзвенные двухщелевые закрылки (рис.2.34д), а также отклоняемые носки крыла
(рис.2,34е) и предкрылки (рис.2.34ж).
Основными геометрическими параметрами механизации являются относи-
тельная хорда Ь3=Ьз/Ь и размах закрылков 73 = €3/Ь , а также угол отклонения за-
крылков 5Э. Нещелевые поворотные закрылки характеризуются величинами
Ь3=0,2-0,3 и б3 < 20с-25с.
Взаимное положение основной части профиля с хордой Ь<; и щелевого за-
крылка характеризуется следующими параметрами.
-углом отклонения закрылка (угол между хордой исходною профиля и ее
продолжением на отклоненном закрылке (см. рис.2.34)),
-относительной хордой bj=bj/b и хордой закрылка в выдвинутом положении
Ь, - ь/ / b,
-шириной щели h - I; / b - относительным расстоянием от задней кромки ос-
новной части профиля до поверхности закрылка по нормали к ней,
b
Рис.2.34
www.vokb-la.spb.ru
45
-выдвижением шкрылка х,"xfc/b - относительным расстоянием вдоль хорды
профйля ог начала закрылка в убранном положении до его начала'в откло-
ненном положении,
-перекрытием закрылка d = <1 / b - относительным расстоянием между задней
кромкой основной части профиля и началом (передней кромкой) закрылка в
убранном положении вдоль хорды профиля,
-перекрытием закрылка х* =- х* / b - относительным расстоянием между зад-
ней кромкой основной части профиля и началом закрылка в отклоненном
положении вдоль хорды профиля.
При определении взаимного расположения основного профиля и двухщеле-
вого закрылка элементы закрылка рассматриваются как единое целое, и использу-
ются те же геометрические параметры, что и для однощелевого закрылка (63, h,x‘).
Для двухщелевого закрылка с дефлектором взаимное расположение основно-
го звена закрылка и дефлектора определяется такими же параметрами, как распо-
ложение предкрылка относительно основного профиля.
Рекомендуемые диапазоны изменения основных геометрических параметров
закрылков:
относительная хорда Ь3~0.2.. 0,35
относительное перекрытие d=(0,3 ..0.8)6,.
Однощелевые закрылки. При заданной форме исходного профиля и выбран-
ных значениях Ь3 и d форма носовой части закрылка может быть определена по
данным, представленным на рис.2.35а.
Рекомендуемые параметры: d—(0,04...0.C’S)b; o,mi( < 45°.
Кинематика отклонения однощелевэго закрылка определяется значениями
параметров:
= 0,45d[J - sm 6 J ,
hopr=0.02( l+cos3S3)( i .2-2,7 d )±0,006
При углах отклонения закрылка 83=4С‘. 45J и d=O,L .0,15 оптимальная ши-
рина щели hopt =(1,8...2)% b.
Однощелевые выдвижные закрылки (закрылки Фаулера): d* b3,
X3Opt=0-5...1,0%; ^^1,3% при b3=O,J; 53пы1<50°.
Ья=(0,2...0,35)Ь3
стах~(0,19„.0,2)Ьд
хСои1 —(0,2...0,25)Ьд
fmax=(0,1...0,12)bA
хг_=(0,4...0,5)Ьд
Дву.хщелевые закрылки с дефлектором. Максимальные углы отклонения
53 < 50°.
Рекомендуемые параметры дефлектора (см. рис. 2.34г).
хорда дефлектора
толщина профиля
положение максимальной толщины
максимальная кривизна дефлектора
положение максимальной кривизны
ширина щели между основной частью
закрылка и дефлектором
относительное расстояние между
передними кромками дефлектора
h=0,01
xj— bj-cos5fl-(0,0l...0,03)
и основного звена закрылка.
Форма носовой части основного звена закрылка определяется по данным
рис.2.35а.
46
Двухщелевые двухзвенные закрылки.
Параметры I-ю звена: ь =(0,5...0,7)Ь3, §3, =25—30°,
Параметры 2-го звена: =(0,3—0,5) Ь3, 53г =25-30°.
Отклоняемые носки крыла. Характеризуются следующими геометрическими
параметрами (см. рис. 2.34е.)
- относительной хордой Ь„=Ьн/Ь=0,1...0,15
- углом отклонения 5И (угол между хордой профиля и се продолжением на от-
клоненном носке), 5н<30°.
Предкрылки. Взаимное поло-
жение предкрылка и основного
профиля определяется следующими
геометрическими параметрами (см.
рис. 2.34ж);
- расстояниями хну вдоль
хорды профиля и перпенди-
кулярно к ней от начала
предкрылка до начала ос-
новного профиля,
- шириной щели hnp - рас-
стояние от задней кромки
предкрылка до поверхности
профиля по нормали к ней:
hi:p=(l,5—2,5)%Ь,
- углом 5пр между хордой
предкрылка Ьпр и хордеЙ
профиля,
- относительной хордой пред-
крылка bIIp=bnp/b, где LIip -
проекция на хорду исходного
профиля расстояния от зад-
ней кромки предкрылка в
убранном положении до но-
совой части профиля;
Ьпр=(0,12—0,17)Ь.
Оптимальное положение
предкрылка относительно основной
части профиля должно определяться
по результатам испытаний моделей
самолетов в аэродинамических тру-
бах. Ориентировочные значения х и
у можно определить по формулам;
x=(l,15-l125)bnpicos6np1,
у =(0,75-0,85) ЬПР| sinfinp,,
а угол между собственной хордой предкрылка ЬПР1 и хордой основного профиля
принять равным бпР1=35°—45°, причем большие значения б ПР[ соответствуют боль-
шим углам отклонения закрылка.
Форма предкрылка может быть выбрана по данным, приведенным на
рис.2.356. www.vokb-la.spb.ru
47
Влияние отклонения механизации на несущие свойства крыла
Типичное изменение коэффициента подъемной силы при отклонении за-
крылков и предкрылков показано на рис.2.23
При расчете аэродинамических характеристик крыла (комбинации крыла с
фюзеляжем) считаются известными следующие харак!ерисгики крыла в крейсер-
ской конфигурации:
- зависимость су(а) при натурных числах Re и М,
- коэффициент подъемной силы при пулевом угле атаки сЛ<1,
- наклон (производная) линейного участка зависимости Су(а),
- коэффициент максимальной подъемной силы с„ ,
- критическим угол атаки акр.
При отклонении закрылков требуется определить следующие величины
Дс -с с - приращение коэффициента подъемной силы та счет ('т-
Ьо Уи
клонения закрылка при нулевом угле атаки,
су -наклон (производную) линейного участка зависимое!и су(а) крыла с откло-
ненным закрылком.
Ас, - с, - cv - приращение коэффициента максимальной по.гьемнои
* г’ах.з ' mix г J ma*
с;ты при огклонении закрылка,
Acv = cv - с, - приращение коэффициента максимальней подъемной
*тдх,гр Учыэцпр г тях
силы при отклонении механизации передней кромки крыла (отклоняемого
носка, предкрылка).
Предполагается, что производные с£ для крыла с отклоненным и неоткло-
иенным предкрылком являются равными, а изменение подъемной силы за счет от-
!• -онения предкрылка на линейном участке зависимости с,(а) пренебрежимо мало
Предполагается также, что крыло имеет большое удлинение (X > 6) и малый
угол стреловидности (х =» 20 ..25е), а механизация имеет параметры, близкие к оп-
тимальным.
Зависимость коэффициента подъемной силы крыла с отклоненным закрыл-
ком от угла а гаки на динеином участке опрезеляется суммой
су. - сУо + А су< L + с" а
Коэффициент максимальной подъемной силы крыла с отклоненной механи-
зацией задней и передней кромок.
^Упин.пр ^Утпал гглх пр
и соответствующий ему критический угол атаки:
“ а*р ь АаХР (р
Расчет приращения коэффициента подъемной силы крыла
при отклонении закрылков
Исходная информация
- тип закрылка и угол его отклонения,
- геометрические параметры относительная хорда закрылка Ь3=Ьэ/Ь, степень
перекрытия закрылка в убранном положении (или увеличение хорды сече-
ния крыла при выдвижении закрылка при нулевом угле отклонения)
d = d/b, относительный размах закрылка А £3 = £31 -/3>, где /31 и - со-
ответственно, расстояния между внешним и внутренним торцами закрылка
и осью симметрии самолета, отнесенные к величине полуразмаха крыла,
48
- относительное увеличение площади крыла за .счет выдвижения закрылка
ASj, для крыльев с прямоугольными кромками увеличение площади крыла
определяется параметрами d2 и dj во внутреннем и внешнем концевых
сечениях закрылка.
А с dj + d2 .
AS3 = - -—• Д^.
Для одно- и двухщелевых закрылков с дефлектором приращение ко )ффици-
ента подьемной силы при нулевом угле атаки определяется по формуле
дсУ1. - Су • Sj • Г(бз),
где cj - с'у f( Ьэ, d)f(A €3) - производная линейною участка зависимости
Дсу =f(63), функция f( ba, d) учитывает влияние относительной хорды Ь3 и увели-
чение площади крыла при выдвижении закрылка, занимающего весь размах крыла.
3’44(lb dJ _b,L __ 0,Ю5
1+ 2,9(1+ d-b3)b3 1 - ),48b3(l + d - b3)
Рис.2.36
♦ ’
На рис 2.36 приведена диаграмма, позволяющая определить величину
f( b3, d) по значениям параметров Ь3 и d непосредственно.
Если параметры Ьэ и d изменяются вдоль размаха крыла, то для определения
величины f( b3, d) следует принять их средние значения:
Ьзср= S3/А 73, 4р- А 8з/Д
Функция f(A^3) учитывает влияние размаха закрылка и зависит от сужения
крыла т) (рис.2.37):
Г(дбН(«„)-ф»)’
где = £Э|// - габаритный размах закрылка,
f32 = £3l/€ - расстояние от оси симметрии самолета до внутреннего торца за-
крылка.
vokb-la.spb.ru
Эмпирическая функция f(g3) учитывает нелинейное изменение приращение
коэффициента подъемной силы крыла от угла ожлонения закрылка и типа за-
крылка при оптимальных значениях х* и h (рис 2 38)
Приращение коэффициента подъемной силы крыла при произвольном vine
атаки
Рис 2 38
Лс51'-^ b Цб3) + с>0 a Xjj tUl )
где х j относительное выцвчжет не а
крыл^а , долях бортовой ^оргч крыт 1 b
по потоку
Коэффициент максим' чь.юи подь-
е ihh 'чти крыла с отклоненными <а-
ъпи, "ям и рассчитывает us пэ ф ф .уле
г с _ ( (HA SJJ К’Чд Sj А с
cv t прдрашение кслффяцнс! та
м юимальчои подъемной очи or вы-
дьижения ыкрылка при нулевом я ле его
vtk'io »еш»> К- эмнирическ и коэффи-
циент (0 _ К £ 0,6)
Приоашение коэффициента макси-
мальной подъемной силы длч крыльеь с
О"'<1ЭСИТъЗ’-НОИ толшиноч с < 12% мохет
быть определено по формуле
Ac wi = 0.46AUjj SkP3 i-Ь,,
где
ok0, - SKP з / S = Д /J 1 + ^—(1 - А ?.) ।
Ра ‘tU'V приращения козф^ациента мак-
симальной подъемной силы при етллпнении
^гхгчззация передней хромки уиыла
Рои отклонение « m крыла на
иптимальгыи у^от j22|
бн^лъ;-^
ПрИрТШеНИе КОЭФФИЦИЕНТ ПсДЪСМЬОИ
си ты определяется пс фо< мс se
^С*нпм ~ 1’35\/Ьн v-OS х
где ьн - относительная хорда итклоняе-
могс носка х~ стреловидность крыла
При отклонении предкрылков с
оптимальными параметрами, опре теляе-
мыми условиями
50
(&np hHp) =0,6- для углов отклонения предкрылков I06 < 5npopt< 35° и ши-
рине щелей
Нир opt “0,12 Jbnp/( 1 >8+^ЬПр),
где Ьпр ЬПр / b относительная хорда предкрылка, приращение коэффициента
максимальной подъемной силы определяется по формуле
1г 0,32^
Лсу.р™ = 2>34\/ьпр— SKPI1P cos2x,
где SKp „J, = SKp пр / S - относительная площадь крыла с отклоненным предкрыл-
ком
При оптимальном комбинации отклонения закрылка и предкрылка критиче-
ский угол атаки оиределяе1ся по формуле
о’р, 11р ” 27" - 2с
*Г*11Р у Пр шах
Расчет момента тангажа крыла при отклонении закрылков
Приращение коэффициента момента тангажа относительно 1/4 средней аэро-
динамической хорды (САХ) крыл 1 при отклонении закрылка определяется по фор-
муле.
Am, - -k m 0,25(1 - bj 2 Ac , где к„ - ф3, п) (рис 2 39)
Расчет коэффициента лобового сопрсявления крыла при отклонении закрылков
Отклонение и выдвижение закрыт ков приводит к изм*-’'ению поляры крыла,
проявляющееся в увеличении коэффициента подъемной сил я с* , соответствующе-
го минимальному значению сч п, и уветичению лобового соглхгивленкя за счет
возрастания профильного сопротивления ДсХ1П и индуктивного сопротивления сх ,
а также дополнительного индуктивного сопротивления Лсх вызываемого неравно-
мерным распределением циркуляции по размаху крыла при отклонении закрылка.
Велщгина cXimin достигается при коэффициенте подъемной силы
Ч =%+4Асу,0
Приращение коэффициента профильного сопротивления крыта
Дсх1п = кфк §крз Д CYlmn + AcXmm А СуД(су> - СУ1 J -г - ACvjOj;
где коэффициент кфК=1,15 учитывает неблагоприятную интерференцию крыла с
фюзеляжем, Дс^^кз c“(b3)3 ^b'3 Ь3 sm53,
где кэ= 0,19 для простого поворотного закрылка,
0,11 для однощелевого закрылка,
0,08 для двухщелевого закрылка
Изменение индуктивного сопротивления крыла, связанное с отклонением за-
крылка, может быть представлено в виде суммы
дсХи - Дсх>1 + Дсхл,
www. vokbt-la. spb.ru
Рис.2.39
гдс A^=nU(c>+Ac,‘bc5J’
Ac1.. = 0,05k(A-V-(^-o5
я Хзф
- эффективное удлинение крыла с не-
отклоненным закрылком,
к^Л/'з) - коэффициент, учитывающий
влияние относи тельного размаха закрылка
и его положение по размаху крыла
(рис.3.42).
52
III. ВОЗДУШНЫЕ ВИНТЫ
3.1 Типы винтов
На самолетах общего назначения могут применяться воздушные винты всех
известных типов:
• винты фиксированного шага (ВФШ), с переставными лопастями (ВФШ-П) и
моноблочные (ВФШ-М),
• винты изменяемого шага (ВИШ), с флюгированием лопастей при отказе дви-
гателя (ВИШ-Ф) и с реверсом тяги на пробеге самолета (ВИШ-Р),
• одиночные винты - с одним рядом лопастей,
• соосные винты - с двумя рядами лопастей встречного вращения,
• винты с контрпропеллером - с входным или выходным направляющим лопа-
точным аппаратом,
• винты в кольце - винты в кольцевой профилированной обечайке,
• тянущие винты - винты перед рядом расположенными элементами планера
самолета или гондолой двигшеля,
• толкающие винты - винты позади элементов планера или гондолы двигателя.
3.2 Основные параметры винта и геометрические характеристики
лопастей
Габаритные размеры винта, его втулки и лопастей описывают следующие ос-
новные параметры.
• диаметр винта - D — 2-R,
• диаметр обтекателя втулки винта (или ступицы для ВФШ-М) - dg = 2 го,
• число лопастей - к.
• максимальная ширина лопасти - bmax.
Основными параметрами, определяющими режим работы винта, яаадются:
• высота полета - Н.
• скорость полета - V,
• параметры воздуха
(плотность - р. скорость зву-
ка - а),
• число оборотов винта - п
[об/мин] и ns [об/с],
• мощность - N,
• крутящий момент - М^,.
• тяга винта - Р,
• угол установки лопасти <рл
ИЛИ <РО 75 (угол между хордой
сечения лопасти на радиусе
г = 0,75-R и направлением
вращения винта).
Геометрические характери-
стики лопасти представляются
в виде зависимостей безраз-
мерных параметров и коорди-
нат сечений лопасти от относи-
тельного радиуса г = r/R (см.
рис. 3.1 - 3.3):
ww^vokb-la. spb.ru
Рис. 3.2
х • относительная ширина селения -
b=b/D или b=b/bnta4,
• относительная толщина сечения - с
~ Сгпах/Ь,
• относительная кривизна сечения - f
= ^пззх/bj
» относительные коордишты поверх-
ности сечения в свяэзннои ? сечени-
ем системе координат -
-. х' у; у;,
Х=Ь- у’=-ь’ У"=Ч ’
относительные координат.11 центра
тяжести сечения в связанной сече-
нием системе координат -
Рис. 3.3
* отн осительные координаты оси лопа-
ли < геометрическое мео/о центров
»ЧХ&сги сечений лопаегы в системе
координат,- связанной- с лопастью -
’r~rt/R. Хс = Xc/R, z4~x/R,
« угол саблевидного опиба лопасти у
(угод между вектором скорости в се-
ч-*нии лопасти и бинормалью к ее
оси),
> угол установки сечения - <р ,
* крутка лопасти 9 — ф - ол-
Сечения лопастей при их большой
ширине или саблевидном оггибе образу-
ются как правило, пересечениями лопа-
с.-« v цилиндрами различного радиуса при
’где становки лопасти, сссг:ветствчотем
расчетному (проектировочному) режиму.
При * iK-Tt, прямых или со слабой сабле-
вшиюстью лопастях исполътлотся плоско-
параллельные сечения, поскольку в атом
у гучае че вносится заметных искажений в
формы профилен сечении лопасти
33 Аэродинамические характери-
стики винтов
Аэродинамические характеристики
винтов представляют собой зависимости
безразмерных коэффициентов, являющих-
ся, наряду с числами Маха и Рейнольдса,
критериями подобия винтов Это позволя-
ет использовать их для определения дей-
ствующих на винт аэродинамических сил
и моментов при изменении диаметра,
числа оборотов и мощности винта, а так-
54
же скорости, высоты или атмосферных уело-
рий полета самолета.
Используются следующие основные ко-
эффициенты.
v
относительная поступь винта X = - -—— ,
щ О
Р
коэффициент тяги винта а =------ ,
Р п« D
коэффициент мощности 0 = — ,
Р nsJ D
эквивалентный коэффициенту крутящего мо-
2 я Мх
менп р - ----—у,
Р Пя U
коэффициент полезного действия (КПД)
При пространственном погружении
винта под влиянием скоса потока (углы атаки
или скольжения) или неоднородного поля
скоростей коэффициенты поперечных сил и
моментов ( Y, Z, Му, М? ), как правило, вы-
числяются аналогично коэффициентам тяги и
крутящего момента.
На рис. 3 4 - 3.8 показаны типичные аэ-
родинамические характеристики винта в виде
зависимостей коэффициентов тяги, мощности
и полезного действия от относительной по-
ступи винта при постоянных значениях углов
установки лопастей, и произзоэлые ог них. за-
висимости коэффициента тяги от коэффици-
ента мощности при постоянных значениях
относительной поступи и утла остановки ло-
гнетей (см. рис. 3 7) и коэффициента мощно-
сти из относительной поступи винта ири по-
стоянных значениях углов установки лопастей
и КПД винта (см рис. 3 8).
Приведенные характеристики могут
быть получены расчетным или эксперимен-
тальным путем При проведении эксперимен-
та в аэродинамических трубах с использова-
нием моделей обеспечивается (как правило)
автомодельность по числу и подобие по
числу М.
Рис 3.5
п
Рис. 3.6
www.vokb-la.spb.ru
55
Рис 3 7
В
г о 75 К “ 6
10 15 20 25 30 X
РИС S
56
3.4 Влияние различных параметров на аэродинамическую
эффективность винтов
При выборе типа и параметров вин
та необходимо учитывать многие факторы,
определяю!дне аэродинамическую эффек-
тивность винта на различных режимах по-
лета, акустические характеристики, проч- ь
ность и ресурс винта, безопасность от раз-
личных форм флаттера лопастей, выбор
материалов и технологии произволе гва
Для достижения высокой аэро дин а 02
мической эффективности на различных
режимах необходимо представлять влия-
ние параметров вичта на различные виды 0 ,
потерь мощности, затрачиваемой на ег''
вращение
КПД винта представляет собой по-
лезную мощность, отнесенную к затра- 0
ченной В связи с этим потери мощности,
отнесенные к затраченной мощности для
одиночного винта, можно представить как
сумму следующих относительных потерь
(см рис 3 Q)
"** ®окр + еН *" епр»
vokb-la.spb.ru
где еинл - относительные индуктивные
(вызванные винтом) потери мощности
в струе, текущей через ометаемую вин-
том площадь, в том числе, сос - относи-
тельные потери кинетической энергии
в осевом направлении в струе в едини-
цу времени, Еокр - аналозичвые «ю’ери,
связанные с закруткой потока в сгруе
за винтом, вн - потери кинетической
энергии в единицу времени, вызванные
азимутальной неоднородностью потока
за винтом, и сПр ' относительные
“профильные” потери ..щщэьчц вы-
званные реальным: 1 своиеяаами среды -
вязкостью и сжимаемостью. На рис.
3 1С показано, что с ростом коэффици-
ент з .мощности винта иля Загружен но-
гти его мощностью - ls/D2 , индуктив-
ные потери мощности винта возраста-
ют. Профильные потери имеют мини-
мум. Но аналогии с полярой крыла по-
ложение этого минимума определяется
значением ’‘интегрального” коэффици-
ента подъемной силы лопастей, соот-
ветствующем их максимальному аэро-
динамическому качеству.
Как показали исследования ха-
рактеристик одиночных оптимальных
В’гнтсъ для скоростей полета, соответ-
с-'зующих числам М-'Ч» осевые и ок-
ружные относительны’ coiepn мощно-
сти не эависят ст чист'., ширины, тол-
ц:.гны и формы лопастей (рис. 3 10-
2 13). Минимальные профильные поте-
ри мощности винтов я• -.их скоростях
малы (рис 3 14), псот'.г»' применение
лопастей саблевидна Йормы умень-
шает профильные г‘тср‘ мощности
лишь при больших с\ор-’1С'*'ях вращения
концов лопастей, соответ-;вуюших
числам Ми=ю R/a>0,” (сравните дан-
ные на рис. 3.15 и 3.13; Рассмотрен-
ные здесь варианты геометрических ха-
рактеристик лопастей приведены на
рис. 3.16.
Относительные потери на азиму-
тальную неоднородность потока связа-
ны с влиянием числа лопастей, и при
стремлении числа допас гей к беско-
нечности они стремятся к нулю.
58
Из приведенных данных для опти-
мальных винтов очевидно, что наиболь-
ший КПД достигается при малом числе
узких лопастей, но при этом необходи-
мый диаметра винта неприемлемо велик
из-за малых оптимальных значений ко-
эффициента мощности (рис. ЗЛО и 3Ji).
Выбор оптимальных параметров винта,
как правило, происходит в условиях же-
стких габаритных ограничений по ком-
поновочным соображениям. Кроме того,
возможны ограничения на окружные
скорости концов лопастей из конструк-
тивны4' соображений или для выполне-
ния ограничений по шуму на местности
или л кабине самолета.
В связи с этим, особое значение
имеет выбор окружной скорости концов
лопастей (когда возможно варьирование
этого параметра или чисел оборотов лин-
та), поскольку её увеличение позволяет
уменьшить коэффициент мощности. На
рис. 3.17 показан пример зависимостей
полетного и индуктивного КПД винта
(йинд 1-^ивд П"^Ецр) 07 числа Мц и на-
груженности винта мощностью N/D2. из
которого видно, что индуктивный КПД с
ростом Ми и уменьшением нагружение -
ста повышается (то-есть снижаются ин-
дуктивные потери), а полезный КПД
имеет максимум при числах Ми завися
тих от нагруженности винта мощностью,
что вызвано смешением положения ми-
нимума профильных потерь мощности
Г-И7-
На рис. ? IS и 3J9 показано. что в
обласп малых скоростей значительная
часть потерь мощности приходится на
осевые потери. Они могут быть умень-
шены, помимо увеличения диаметра и
числа оборотов винта, заключением вин-
та в кольцо, позволяющим снизить осе-
вые скорости в струе за винтом при од-
новременном увеличении расхода
П
О 9
М.. 0 4. М„ - 0.9, bm„ - 0.U, К = 8
*;1ис 1 1 *
ww5Sbokb-la. spb.ru
Рис. 3.20
Рис. 3.19
60
воздуха через сметаемую винтом площадь '
(см- ниже). Окружные потери могут быть
снижены при использовании соосного
винта или винта с коптрпропеллером На
рис. 3.20 и 3.21 показаны результаты экс-
периментальною исследования одиноч-
ных и соосных винтов с различным чис-
лом лопасюй, позволяющие судить об
эффективности соосных винтов ь области
высокой погруженности мощностью, где
уровень окружных потерь весьма высок.
Проиллюстрированная здесь мето-
дика анализа характеристик и используе-
мые для расчетов методы оптимизации
винта позволяют найти наиболее эффек-
тивное решение при выборе параметров и
проектировании лопастей винтов.
П
Рис. 3.21
3.5 Винты фиксированного шага
При использовании ВФШ, особенно ВФШ-М, выбор оптимальных парамет-
ров винга затруднен тем, что три оптимизации винта на режиме крейссоского по-
лета, как это делается при проектировании ВИШ, могут быть большие потеря г.Ч1Н
на режимах разбега самолета.
Рис. 3.22
ww^vokb-la.spb.
На рис. 3.22 приведены результаты расчета характеристик ВФШ-М для лег- ;
кого самолета с поршневым двигателем М-332 в виде зависимостей тяги и мощно- j
сти винта от числа оборотов, угла установки лопасгеЙ и скорости полета. На этом ’
примере видно, что угол установки лопасти может быть выбран таким, чтобы при -
максимальном числе оборотов п = 2750об/мин, соответствующем максимальной
мощности N = 124л.с.. достичь заданную максимальную скорость полета - V = 180
км/час Значение угла установки в данном случае равно флН2,7°. При этом <рл
взлетная тяга будет существенно ниже из-за смещения точки согласования потреб-
ляемой винтом мощности с внешней характеристикой двигателя па меньшее число
оборотов, чем в случае применения ВИШ. обеспечивающего настройку на заданное
число оборотов ( на взлете - максимальное).
3.6 Винты в кольце
П рименение профил npi данного
кольца (рис 3.23а) позволяет t. некоторых
случаях значительно улучшить тяговые ха-
рактеристики по сравнению с изолиро-
ванным воздушным винтом. Кольцо также
может играть роль оперения в аэродина-
мической схеме летательного аппарата,
являться конструктивно опорным элемен-
том, в кагором монтируются аэродинами-
ческие рули, располагаемые сразу за
плоскостью винта в ускоренном воздуш-
ном потоке, повышающем эффективность
рулей. Кольцо выполняет и защитную
функцию ограждения винта.
Существенной особенностью винто-
кольцевого движителя 1ВКД) является
снижение оптимальной окружной скоро-
сти, что облегчает задачу создания опти-
мальною движителя и способствует улуч-
шению акустических характеристик (рис.
3.236) Выигрыш в гяге от применения
ВКД зависит от удельной нагруженности
мощностью N/DB2 и скорости полета V.
Чем больше нагруженность винта
мощностью, тем выше прирост тяги от
применения кольца. При одном и том же
значении диаметра винта в кольце и изо-
лированного Овиз = йВвкл (но пРи Раз^
ных габаритных размерах) прирост тяги Р
при малых скоростях и больших значени-
ях N/DB2 достигает величины 120% (рис.
3.24а). С увеличением скорости прирост
тяги от применения кольца снижается до
нуля, и при дальнейшем возрастании ско-
рости применение ВКД становится неце-
лесообразным. Если сравнивать изолиро-
ванный винт и ВКД при одинаковых га-
баригных размерах DBll3 — DBKll, то пре-
лмущество ВКД по тяге при малых скоростях снижается примерно до 40%. При
этом диапазон скоростей, в котором ВКД такого типа имеет преимущество, резко
сокращу™ (Рис- 3.246).
3.7 Влияние винтомоторной силовой установки на аэродинамические
характеристики легких самолётов
Основными факторами, определяющими изменение аэродинамических харак-
теристик самолета с винтомоторной силовой установкой (ВМСУ) являются:
• величина тяги воздушного винта (ВВ) и ее момент относительно центра масс
самолета,
• величина поперечной силы на ВВ в скошенном потоке о се момент относи-
тельно центра масс самолета,
• расположение ВМСУ на самолете,
• параметры струи за В В (размеры, ферма, профили скоро л ей и т.н.) и ее воз-
действие на обтекэнве и аэродинамические характеристики эле лендов само-
лета (м -гоюндолу, фюзеляж, крыло, оперение и др.).
Воздействие указанных факторов на аэродинамические характеристики само-
лета определяют с учетом взаимодействия ВВ и планера самолета Основными эф-
фектами аэродинамического взаимодействия ВМСУ и планера самолета являются:
• изменение величины и направления местной скорости потока в области рас-
положения ВВ, вызванное воздействием элементов самолета iмотогондолы,
фюзеляжа, крыла и др.),и соответствующее изменение сил и моментов на ло-
пастях ВВ и его тяговых характеристик,
• увеличение давления непосредственно за плоскостью В В и его уменьшение
(разрежение) перед ВБ и соответствующее увеличение аэродинамического со-
противления элементов самолета, расположенных вблизи ВВ,
• увеличение скорости течения на участках элементов самолета, обдуваемых
струей В В, и изменение их аэродинамических характеристик .
Вследствие аэродинамической интерференции, в зависимости от компоновки
ВМСУ на самолете, могут существенно изменяться эффективная тяга БМСУ, необ-
ходимая для обеспечения поступ-iГсльж гэ движения самолета, а также несущие
свойства самолета и характеристики его устойчивости и управляемости.
Варианты расположения ВМСУ на легких самолетах отличаются большим
разнообразием: нт фюзеляже в тянущей или толкающей схемах, на крыле, на пило-
нах, хвостовом оперении и т.п. Это вызывает значительные трудности в определе-
нии аэродинамических характеристик самолетов с учетом интерференции с ВМСУ.
Для предварительной опенки аэродинамических характеристик самолета с ВМСУ
могут быть использованы современные расчетные методы, ое^званйы? на наиболее
полном моделировании особенностей взаимодействия струй ВЬ z пятне ром самоле-
та jl], а также приближенные инженерные методики, базирующееся на упрощен-
ных математических моделях и экспериментальных данных ]1-4;. Однако, наиболее
надежным способом определения аэродинамических характеристик самолетов с
ВМСУ в настоящее время являются экспериментальные исследования моделей са-
молетов с работающими модельными силовыми установками в аэродинамических
трубах или натурных самолетов с работающими двигателями в большой аэродина-
мической трубе Т-101 ЦАГИ.
Силы и моменты, действующие на самолет с ВМСУ
В общем случае результирующая сила R, действующая на самолет с рабо-
тающей ВМСУ, является векторной суммой аэродинамической силы Ra и силы тя-
62
www.Wftb-la.spb.ru
hi воздушного винта Р. Аэродинамическая сила R , представляет собой сумму аэ-
родинамической силы Rae самолета без В В и приращения ARa, обусловленного
воздействием струи от ВВ на обтекание самолета:
Ra-Ra[t+ARa (3J)
Тяга ВВ, установленного на самолете, может быть представлена в виде суммы
1Я1И изолированного ВВ (р0) и изменения тяги ВВ, вызванного воздействием пла-
нера самолета на характеристики течения в плоскости ВВ
Р - Ро + АР (3.2)
В выражении (3 2) величина Р представляет векторную сумму осевой тяги ВВ
Рос и поперечной силы Ру, возникающей в плоскости ВВ при его работе в ско-
шенном потоке (рис. 3 25).
Р = Рос + Ру (3 3)
Если вектор скорости набегающего на ВВ погона параллелен оси ВВ, то по-
перечная сила на ВВ нс возникает и Р = POt
Талим образом, результирующая сила, действующая на самолет с ВМСУ, пред-
ставляет сумму.
R = Ra <- Р = Rd( + ARa । Ро г АР - Rao + ARa + Рос +Ру (3.4)
где величины Рос и Ру определяются с учетом воздействия планера самолета
Составляющие результирующей силы в скоростной системе координат и ее мо-
мент относительно центра масс самолега.
RKa = Ха + 4 Ха - Рос cos(ot + <pr) + Ру sin(a + <рг)
Rya - Ya + A Ya - Рое sinfo + <рт) + Ру cos(a + фг) (3 5)
М7, = Mr + AMI - Рос Ув + Ру хв,
Рис. 3 25
где Ха , Ya и Mz - лобовое сопро-
тивление, подъемная сила и мо-
мент тангажа самолета без ВВ,
АХа , AYa и AMZ — приращения
соответствующих аэродинамиче-
ских сил и момента тангажа, вы-
званные воздействием струи В В,
Рос - осевая тяга ВВ, Ру - попе-
речная сила на ВВ, а - угол ата-
ки, фг - угол установки мотогон-
долы ВМСУ, ув — расстояние от
линии действия вектора осевой
тяги В В до центра масс самолета,
хв - расстояние от плоскости
вращения В В до центра масс са-
молета
При малых углах атаки и уг-
ле установки мотогондолы фг = -а:
Rx^Xa + AXa P
Ry= Ya + AYa
Mz£ = Mz + A Mz - P Ув.
(3.6)
64
В этим случае, соответствующем условиям крейсерского полета, при расчете
детно-технических характеристик самолета обычно используют понятие
«эффективной” или полезной тяги ВМСУ, необходимой для обеспечения устано-
ривтеюся горизонтального полета с учетом увеличения сопротивления самолета
вследствие обдува.
Рэф=Р~АХа, (3.7)
где Р — тяга ВВ в компоновке самолега
Величина ДХа состоит из лрирашения сопротивления прилегающих к ВВ
элементов самолета под воздействием поля давлений, создаваемых ВВ (ДХар), и
приращения сопротивления обдуваемых частей самолета (ЛХа<1) вследствие увели-
чения скорости (скоростного напора) в струе ВВ.
ЛХ;1-ЛХар +ЛХ3ц, (3.8)
где AXdp пропорциональна Р.
AXap=kv-P, (3.9)
Voc-V
где kv= - -средний коэффициент торможения потока в области раоноаоже
' Об
ния ВВ.
Величина AXaq определяется как разноси, сопротивления ш частей самолета,
находящихся в струе В В при скорости V=V«V1 + B (скоростном напоре
q=q„(l + В)), и сопротивления этих частей в невозмущенном потоке V,.
Р m
AXaq = — Scxaj-Sj, (3.10)
FB J=1
где cxaj и Sj - коэффициент сопротивления и характерная площадь j о и части са
молета, находящейся в сгруе, FB = " площадь, сметаемая БВ диаметром 1)
Р
В=——— - коэффициент нагрузки на ометаемую В В площадь.
Чоо’ Гв
Таким образом;
- (P kvP ЛХ;щ) = P(I kJ, <3 И
1 m
где коС = кх + ZcVJJ Sj - коэффициент, показывающий, на сколько уменьшается
г“в j-i
тяга ВВ за счет увеличения сопротивления самолета при обдуве его частей стрте*
ВВ.
При известных характеристиках изолированного В В для расчетов удобно ис-
пользовать поправку в виде отношения:
к* = ’*’ = Р-(1р-М = к> (, _U> (3.12.
ГС Го
где ро _ тяга изолированного ВВ в невозмущенном потоке,
Кв-Р/Ро - коэффициент, учитывающий изменение тяги ВВ, вызванное влиянием
планера самолета.
Эффективный коэффициент тяги ВВ.
«эф = = а» О' к<*) 0-13)
Эффективный КПД ВВ.
= Цг1= 1^т“к7= По(1 “коб)кв’ (314)
где т]0 - КПД изолированного ВВ. www.vokb-la.spb.ru
65
Из (3.14) следует, что КПД ВВ, установленною на самолете, увеличивается за
счет торможения потока в плоскости В В (ку) и уменьшается за счет обдува частей
самолета струей ВВ (к,*,)-
Величины, входящие в выражения (3.5), (3.6) для результирующей силы, дей- г
ствуюшей на самолет с ВМСУ, а также для эффективной тяги (3.7) и эффективного
КПД ВВ (3.14), могут быть определены расчетным путем или экспериментально на
моделях самолетов с работающими модельными силовыми установками. При испы-
таниях в АДТ измеряется сила тяги на валу ВВ и результирующие силы и моменты,
действующие на модель с работающими В В, а также аэродинамические силы и мо-
менты на модели самолета без ВВ. В результате определяются приращения аэроди-
намических сил и моментов, вызванные воздействием струй ВВ, а так же эффек-
тивная тяга ВМСУ;
ДХа=Ы>л -Х«,-Р (3.15)
Рзф^-Х.
Предварительные оценки эффектов интерференции планера самолета и В В
могут быть выполнены по изложенным ниж'с приближенным методикам.
Влияние мотогондолы (фюзеляжа) м характеристики ВВ
Рис. 3.26
1- к¥
Влияние мотогондолы
(фюзеляжа) на аэродинамические ха-
рактеристики ВВ при его расположе-
нии в тянущей или толкающей схеме
проявляется в уменьшении осевой
составляющей скорости потока, ха-
рактеризуемой коэффициентом тор-
можения kv, и возникновением ради-
альной составляющей скорости. /
Коэффициент торможения по-
тока зависит от величины отношения
г
. где г — радиус а дани он точке
плоскости ВВ, гг ~ приведен-
ный радиус мотсгокдолы, fr - пло-
щадь ее милелевого сечения.
Величина коэффициента тор-
можения зависит от параметров ме-
то гондолы (рис.3.26) и. главным об-
разом, от формы ее носовой части
(рис. 3.27) |5|.
По приведенным на рис. 3.26
и 3.27 данным могут быть определе-
ны величины коэффициента kv в
плоскости В В для расчета характери-
стик ВВ в условиях заторможенного .
потока Р=РО(1+kVep).
На рис. 3.28 и 3.29 в качестве
примера приведены результаты расчетов
трех вариантов ВИШ с различными
диаметрами и шириной лопастей, вы-
полненных для опенки их применения
на легком одномоторном самолете с
поршневым двигателем воздушного ох-
лаждения М-14МП, заключенным в об-
текатель. Из рис. 3.28 видно, что в ус-
ловиях торможения потока тяга Б В воз-
растает (КВ=Р/РО>1), причем особенно
сильно при больших величинах скоро-
сти или относительной поступи ВВ. За-
висимости коэффициента эффективной
тяги от коэффициента мощности, при-
веденные на рис. 3.29, показывают, что
при больших значениях относительной
поступи В В (Хв>1) наблюдаегся поло-
жительный эффект от взаимодействия
ВВ и самолета (К,ф>1). Приведенные
данные показывают, в частности, что
увеличение диаметра ВВ при кв<1,2
приводит к росту эффективной тяги как
за счет увеличения тяги изолированного
ВВ, так и КИ]). При ав>1,6 увеличение
диаметра В В приводит к снижению К-,,],
практически во всем рассмотренном
диапазоне значений коэффициента
мощности. Следовательно, на этих ре-
жимах вывод о преимуществе ВВ с уве-
личенным диаметром следует подтвер-
дить, используя расчет эффекта ямой гэ-
ги.
При приближенной оценке влия-
ния торможения потока носовой частью
гондолы можно считать, что это тормо-
жение одинаково на всех радиусах В В.
В этом случае степень торможения по-
тока гондолой в месте установки В В
оценивается средним коэффициентом
торможения, который может быть опре-
делен по приближенным эксперимен-
тальным зависимостям (4):
для тянущих ВВ
k. = 3.9cVi(fr/F.);i,
для толкающих В В
k¥ = 2,3cWir(ft/FB)‘\ (3.16)
Рис. 3.28
www. vokb-la. spb.ru
67
66
где сх — коэффициент лобовою сопро-
тивления гондолы двигателя, учитываю-
щий форму гондолы и режим полета.
Эффективный КПД ВМСУ, учиты-
вающий влияние мотого! щолы на В Ji
может быть определен в первом прибли-
жении по формуле J21
тЪф=П(К (3 17)
где т]0 - f(Z,u,p в) — зависимость КПД от
относительной поступи и коэффициента
мощности ВВ, кг — коэффициент влияния
гондолы (фюзеляжа) на В В, определяе-
мый по зависимости, приведенной на
рис 3 30, где — отношение эквивалентного диаметра гондолы d3=l,13 ;'fr к
диаметру В В D„.
Волее достоверную и полную информацию по взаимодействию ВВ и самолета
дают современные методы расчета обзекания планера без ВВ и в присутствии винта
(или винтов). Поле скоростей в зоне расположения В В, полученное в результате
расчета обтекания самолета, используется ты определения параметров потока, об-
текающего сечения лопастей В В. распределения аэродинамических сил вдоль лопа-
стей и суммарных аэродинамических сил. действующих на ВВ.
Влияте крыла на характеристики воздушного винта
Влияние крыла н,. распелез знный перед ним В В подобно влиянию мотэгш-
долы или фюзеляжа, но поток тормозится перед крылом, как правило, значительно
слабее. Влияние крыла на ВВ, расположенный над крылом или под ним, может
оказаться значительным и проявляться в увеличении или уменьшении скорости по-
тока, набегающего на В В, по сравнению со скоростью невозмущенного потока
Для приближенной оценки влияния ксыла на работу В В используют средний
коэффициент торможения потока, который определяется по формуле [4|.
где сУ1 — коэффициент подъемной силы крыла. Ьд — средняя аэродинамическая
хорда крыла, dB - расстояние между хордой крыла и осью ВВ (dB<0 - мотогондолы
под крылом, ds>0 - над крылом), ав — расстояние от 0,25 хорды сечения крыла в
месте расположения мотогондолы до плоскости В В.
Если вектор скорости набегающего на ВВ потока не параллелен оси В В, или
в его плоскости возникает составляющая скорости Vy, то на ВВ возникает попереч-
ная сила Ру, расположенная в плоскости его вращения (см рис. 3.25). Эта сила из-
меняет подъемную силу и момент тангажа самолета. Поперечная сила на ВВ зави-
сит от:
• угла между вектором скорости набегающего потока и осью ВВ,
• режима работы ВВ, характеризуемого известными коэффициентами А.в, ав, рв и
связанным с ними коэффициентом В,
• угла установки лопастей ВВ,
• геометрических характеристик лопастей В В ,
• количества лопастей ВВ,
• типа В В (одиночный или соосный).
68
Вел тин у поперечной силы на В В
следуй определять по результатам испы-
таний модели ВВ в АДЗ или по имею-
щимся экспериментальным данным для
подобных В В
Для предварительных расчетов ве-
личину коэффициента поперечной силы
на В В ку (отношение поперечной силы на
ВВ к сметаемой площади ВВ и скорост-
ному напору) можно оценить по формуле
161 '
k, = ky. ky, Г (3.19)
где коэффициент кУ| «висит от типа ВВ,
числа лопзегей и >1ла их установки при
геометрическом параметре, определяемом
по формуле:
F=525( bwx bJ(U<)F270 Ьлич=80
Ве.,1ичина к, ДЛ* В В с другими
геометрическими параметрами определя-
ется с помощью графиксь рис 3 32. Ко-
эффициент f является одинаковым для
всех типом ВВ и завися i от величины ко-
эффициента В (рис 3 33)
Величина коэффициента (1- —
<Эа
характеризующего изменение скоса пото-
ка перед крылом, определяется по рис.
3.34 в зависимости от относительного
удаления плоскости крашения В В л точ-
ки, расположенной на 25% бортовой хор-
ды крыла. Здесь Л. - удлинение крыла.
Изменения коэффициента подъем-
ной силы и коэффициента момента тан-
гажа самолета от влияния поперечной
силы на В В определяются ’по прибли-
женным формулам:
а ХФГ ,
57,3 кз
кч
1 4 -
1 2 -
1 О -
08 -
06 -
40
Рис. 3.3]
Д mzn = А Суп ** (3-20),
ЬА
где хв — расстояние от плоскости враще-
ния ВВ до центра масс самолета, i — ко-
личество двигателей.
WWW. vokb-la. spb.ru
Аэродинамические характеристики воздушного, винта при его установке на самолете
Распределение коэффициентов торможения потока
в плокости вращения ВВ (в его отсутствии) при
а = 5’, р - О, 5Э = О
Рис. 3.36
Суммарный коэффици-
ент торможения потока гондо-
лой двигателя и крылом в мес-
те установки В В равен сумме;
kvr=kvr+kvKP- В этом случае
местная скорость потока в
плоскости В В V=-Vo(l-kvb), а
величина скорости невозму-
щенного потока может быть
представлена в виде Va »
V(l+kvr).
Зависимость V, от V по-
зволяет приближен но нересчи-
тат ь аэроди нам и чески е к арак -
тсристики изолированного В В
а rt<3 " 11 ( '"-во ) J Р но" fl( ^-во ) J
соответствующие
истинной скорости V потока,
набегающего на ВВ, на аэро-
динамические характеристики
В В, соответствующие скорости
V, неаозмущенного потока,
набегающего на самолет
Ctm ~ f-4 (лвж) j Рд, — Гз(л.в<и)1
П„ -= При этом аво = а»
И Pjo = Р» ’ А.ВО Х.ЦХ
v.
njV щ-U
-kJbKVL) (3.21)
Пример такого пересчета при-
веден на рис. 3.35.
При расположении ВВ в
толкающей схеме за мотогон-
долой (фю'.сляжем) поле ско-
ростей может бытп существенно
неравномерным, г»а рис. 3.36
представлены результаты изме-
рений скоростного напора
( р = 1 - , q - местный скоро-
стной напор), в плоскости дис-
ка ВВ, расположенного в хво-
стовой части фюзеляжа легкого
самолета, которые свидетельст-
вуют о значительной
70
неравномерноеiи потока. Эта неравно-
мерность усиливается при отклонении
закрылков, а также при наличии косой
обдувки. Вследствие этого происходит
нестационарное нагружение лопастей
ВВ и соответствующее ухудшение его
прочностных характеристик и ресурса.
На рис. 3.37 приведены результа-
ты расчета шестилопаетного толкающе-
го ВИШ для административного само-
лета с хвостовой компоновкой двигате-
лей на режиме крейсерского полета в
виде зависимостей коэффициентов аэ-
родинамических сил и моментов В В о г
угла азимутального положения лопасти.
Видно, что на лопастях ВВ и его налу
возникают динамические нагрузки, ко
торые необходимо учитывать при разра-
ботке ВМСУ самолета.
Влияние воздушного винта на агредича-
минеские характеристики мотогондолы
Влияние ВВ на мотогондолу про-
является в увеличении давления в струе
непосредственно за плоскостью враще-
ния ВВ, а также в увеличении скорости
потока за В В, превышающей скорость
набегающего невозмущенного потока и
отличающейся от нее по направлению
вследствие закрутки и несовпадения оси
ВВ с направлением невозмущеннэгс
потока или отклонения струи ВВ дру-
гими частями самолета.
Н=9км. У=550км/ч
о 11 1
Z I
I \
ci J X________________
Рис. 3.37
Увеличение давления в струе за
В В вызывает возникновение силы реакции R=AXap носовой части мотогондолы
(фюзеляжа), расположенной в струе. Эта сила пропорциональна силе тяги ВВ и
направлена в противоположном ей направлении. Величина силы давления зависит
от величины относительного радиуса ВВ ( г = гД ) и отношения площади миделе-
вого сечения гондолы fr к ометаемоч ВВ площади FB. Зависимости относительного
уменьшения тяги ВВ за счет увеличения давления на носовой 'лети гондолы (в тя-
нущей схеме) или увеличения разрежения в се кормовой части (в толкающей схеме)
от величины отношения fr/FB представлены на рис. 3.38.
Приращение лобового сопротивления гондолы за счет увеличенной скорости
потока за В В может быть определено по формуле:
ДХч=Рс (3.22)
гв
Полное добавочное сопротивление гондолы от влияния В В:
AXar=AXap+AXaq
Эффективная тяга ВМСУ;
Рэф=Р-АХаг
(3.23)
(3.24)
www. vokb-la. spb.ru
71
Влияние воздушных винтов на аэродинамические характеристики самолёта
Влияние струи за ВВ на крыло проявляется в увеличении скорости
(скоростного напора) на обдуваемых частях крыла и местного эффективного угла
атаки обдуваемых сечений, что сопровождается изменением несущих свойств крыла
и его сопротивления. Особенно существенным является увеличение подъемной си-
лы на крыле с отклоненной взлетно-посадочной механизацией. Это увеличение
связано, главным образом, с увеличением скоростного напора на обдуваемых час-
тях крыла и улучшением обтекания крыла и отклоненных закрылков (ликвидация
отрыва потока, эффект суперциркуляции), а также с отклонением вектора тяги
ВМСУ при обдуве механизированного крыла. Для расчета аэродинамических ха-
рактеристик самолета с учетом воздействия струй В В используются современные
методы, основанные на моделировании самолета и струй вихревыми особенностями
|1], а также приближенные полуэмпирические методы |2-4].
В случае обдува крыла с неотклоненной механизацией приращение коэффициен-
та подъемной силы может быть определено по формуле |2|:
Асъ~ -=сУ1 ^В’ (3'25)’
где су> - коэффициент подъемной силы крыла без обдува,
S„6 = £ S« i —суммарная площадь обдуваемых участков крыла,
S - площадь крыла.
Коэффициент подъемной силы крыла с учетом обдува:
с
= 0.26)
Расчеты по формулам (3 251 и (3.26) удовлетворительно согласуются с экспе-
риментальными данными в случае слаб ш сгруженных ВВ (В< 1), т.е. при больших
скоростях полета, для крыльев с неотклоненной (или отклоненной на небольшие
углы) механизацией.
Приращение коэффициента подъемной силы при обдуве крыла с отклонен-
ной механизацией можгг быть определено по приближенному методу (3J:
F s с“ Р
Дсу<об = (Дс“ sina + Дс®м sinS - 1крБ —* с)-~ 4 ikpB—5-sinO, (3.27)
S()6 S 2л S
где Дс“ и ДСу — приращение производ-
ных коэффициентов подъемной силы по
углу атаки крыла а и углу отклонения
струи S ъ i — число ВВ, кр - коэффициент,
учитывающий потери тяги В В при откло-
нении струи, 6 - суммарный угол поворота
струикрылом с отклоненной механизаци-
ей, с - относительная толщина крыла,
с“- производная коэффициента подъем-
ной силы крыла без обдува, 1/рад.
Угол 0 определяется как сумма углов:
6= Экр + 03 + a + фг, (3.28)
72
где <р, — угол установки мотоюндолы
ВВ относительно крыла, 0кр и 63 —
углы отклонения струи крылом и за-
крылком, определяемые по экспери-
ментальной зависимости
е/5э = f(b-,/DB) (рис. 3.39), обобщен-
ной для различных типов закрылков:
О 6
9з - у 63, 0к₽ = фг (3-z9)
о3 О,
При определении 9кр надо по-
лагать
5а = <рг и Ьз = Ь.
Коэффициент kp - J = f(93)
10 20 30 40 50 60 е3°
Шелевой закрылок
0.4 L
0
Т/Р
0.8 -
для различных типов закрылков оп-
ределяется по экспериментальным
зависимостям, приведенным на рис
3.40.
Производные Дс“. и Де® на-
ходятся с помощью теоретических
зависимостей, приведенных на
рис. 3.41.
Де® = с®_(сц. э,)- с® (ct - O.b.)
Дс“ = с® (сц,Ь3 - 100%) (3.30)
где cM=ikp B F3 f^F^/S.^,,
9 = е-а.
При малых а и S формула
(3.27) может быть представлена в ви-
де:
ДсУаОб Де¥дд + AcJsp. (3.31)
где Лсу д - приращение коэффициен-
та подъемной силы за счет эффекта
суперциркуляции, определяемое по
формуле:
ДсУлд = (Дс“ • а + Дс® 9 -
с“ S 6 <3-32>
-c,9)(I + c)^-f
0.6 -----,----,___,________т____,____
0 10 20 30 40 50 60 в3°
Нощвижной щелевой закрылок
- — два винта на полуразмахе бе-4 г^секрытии
- — один линт на полуразмахе
о ю го зо 4о 50 б’о
Рис. 3 40
Рис. 3.41
ДсУа1>~ приращение коэффициента подъемной силы за счет реакции отклоненной
струи:
дсу<р =ikpB^e (3.33)
Приращение коэффициента лобового сопротивления крыла при обдуве может
быть приближенно оценено по формуле:
дсХасб = Д%; + ДсХ11 + ДсКар, (3.34)
Ие Лс«- +AC>.a)Z -'?.]• 4см " °’05 k<3“ 4С’»’
Лсхар =-i-kp-B-F, COS0,
www.vokb-la.spb.ru
73
су — коэффициент подъемной силы крыла без обдува;
Лэф - эффективное удлинение крыла без обдува,
- коэффициент, учитывающий величину относительного размаха части
крыла (закрылка), обдуваемой струей В В (рис. 3.42).
Приращение коэффициента момени тангажа крыла относительно центра
масс самолета при обдуве его струями ЕВ вызвано в основном приращением подъ-
емной силы:
Атг = -ЛсУ1(Х-Хт). (3.35)
- х
где А = - - относительная координата точки приложения подъемной силы ЛУа,
которую в первом приближении можно считать совпадающей с аэродинамическим
’ - -- 4rtiz
фокусом крыла по углу отклонения закрылка (вторым фокусом); X, - X. — ’ .
Acvi3
Влияние струи от В В на характеристики горизонтального с.пгрения в случае
самолета нормальной схемы проявляется в увеличении скорости потока и в увели-
чении угла скоса потока у оперения .
Приближенно дополнительный угол скоса потока определяется следующим
образом (4]:
для самолета с одним В В
еа - (2 + 6,6B)cyj
для самолета с несколькими ВВ
(3.36)
е1( - (0,5 । 6В)сУа (3.37)
Приращение коэффициента подъемной силы горизонтального оперения в ре-
зультате влияния струи от ВВ;
74
^суаго - сулго[(а + Фг+ Еф+пбп)кпВ еи(1 kRB)jsrtJ, (3.38)
где Sro = Sro/S- относительная площадь горизонтального оперения, с“ , о - произ-
водная коэффициента подъемной силы ГО без обдува, фпэ - угол установки ГО от-
носительно крыла, Екр ~ су> /2яХ,ф — скос потока от крыла, Еф- скос потока от фю-
зеляжа (Еф=1°-*-],5°), 6В - угол отклонения руля высоты, п - коэффициент эффек-
тивности руля высоты, ко - коэффициент, учитывающий относительные размеры
ВБ и ГО;
для одномоторных самолетов k„ ® 0,75Вд / /’го.
для двухмоторных самолетов к„ ~ 0,75(1 - 2?в / f.o + D3 / ?гэ),
где /л>“ размах ГО, z,<~ расстояние от плоскости симметрии самолет до оси ВВ.
Приращение коэффициента момента тангажа горизонтального оперения,
возникающее за счёт обдува струями ВВ;
01 Лсу3гр(ХвгГО - Хт). (3.39)
гдсХр^— относительная координата аэродинамического фокуса i ори остального
оперения но углу атаки.
Кроме дополнительных аэродинамических сил и моментов, возникающих на
отдельных частях самолета при обдуве их струен от В В, на самолете появляются
дополнительные силы от косой обдувки ВВ и момент этих сил относительно центра
масс самолета. Аэродинамические коэффициенты этих сил и момента тангажа оп-
ределяются по формулам (3.20) или по следующим приближенным выражениям;
\сУ1Ц «0.05гсу /S
Дсх^п г. 0,05icya(a т oa)D^ /S (3.40)
Дт_ч « 0,05icyxBDB / S
Коэффициент момента тангажа, создаваемого тягой ВВ относительно центра
масс самолета:
Лш,Р = -Р / q„S ЬЛ у„ = -с? ув (3.41)
Приращения коэффициентов подъемной силы, лобового сопротивления и
момента тангажа самолета в результате заботы ВМСУ определяют как суммы при-
ращений соответствующих аэродинамических коэффициентов его частей.
3.8 Расчетные исследования винтов
ЦАГИ располагает современной экспериментальной базой к методами расче-
та на ЭВМ, необходимыми для разработки и исследования характеристик воздуш-
ных винтов, винтовентиляторов и винтов в кольце для самолетов различного на-
значения и других транспортных средств.
При разработке и исследовании характеристик винтов проводятся следующие
расчетные работы:
• анализ условий работы винта при его установке на самолет,
• выбор типа и оптимальных параметров винта с учетом влияния его компонов-
ки на самолете,
• оптимальное аэродинамическое проектирование винта и расчет его аэродина-
мических, акустических и прочностных характеристик,
• расчет взаимодействия винта с планером самолета или отдельными его эле-
ментами (крылом, оперением, мотогондолами, воздухозаборниками, радиато-
рами и т.п. к www.vokb-la.spb.ru
75
3.9 Экспериментальные исследования
Опыт разработки винтов показывает, что расчетный анализ необходим на
этапе их предварительного проектирования. Однако для подтверждения правильно-
сти принятого технического решения и характеристик необходимы и эксперимен-
тальные исследования винта Для этой цели по результатам расчетного анализа
проводятся следующие работы:
«> проектирование натурных винтов и их моделей,
• изготовление натурных лопастей и их моделей,
• проектирование и изготовление моделей самолетов и гондол для исследова-
ния их взаимодействия с винтом,
• экспериментальные исследования характеристик винтов на стендах и в аэро-
динамических трубах,
• экспериментальные исследования взаимодействия винта и планера в различ-
ных аэродинамических трубах,
• экспериментальные исследования течения па входе в ТВД с тянущим винтом
и обтекания сопла ГВД с толкающим винтом,
• исследования обтекания и деформации лопастей винтов,
• испытания натурных силовых установок и самолетов с работающими двига-
телями в аэродинамических трубах и на стендах.
При испытаниях винтов и их моделей используются следующие аэродинами-
ческие трубы и стенды.
• аэродинамическая труба Т-104 с открытой рабочей частью, имеет сопло круг-
лого сечения диаметром 7м, диапазон скоростей 0 -s- 125 м/с, диапазон унтов
атаки от -15 до +15 град., диапазон углов скольжения от -180 до -*-180 град.,
• аэродинамическая труба Т-101 с открытой рабочей частью, имеет эллиптиче-
ское сопло размером 24 х 14 м, диапазон скоростей 0 - о0 м/с, диапазон уг-
лов атаки 40 град., диапазон углов скольжения от -180 до +180 град.,
• аэродинамическая труба Т-107 имеет закрытую цилиндрическую рабочую
часть диаметром 2,7 м, диапазон чисел Маха от 0,3 до 0,85,
• винтовой прибор ВП-107 имеет переменное число оборотов, максимальную
мощность 600 кВт при числе оборотов 12000 об/мин, применяется для испы-
таний моделей одиночных винтов диаметром по 1 м в аэродинамических тру-
бах Т-104 и Т-107, модели соосных винтов испытываются с использованием
двух ВП-107,
• винтовой прибор ВВП имеет переменное число оборотов, максимальную
мощность 1500 кВт при числе оборотов 6000 об/мин, применяется для испы-
таний моделей одиночных и соосных винтов диаметром до 1,5 м в аэродина-
мических трубах Т-104 и Т-107, оборудован встроенными во втулки шести-
компонентными тензовесами,
• винтовой прибор СДУ-104М имеет переменное число оборотов, максималь-
ную мощность 1500кВт при числе оборотов от 500 до 3000 об/мин за счет
применения редуктора со сменными шестернями, применяется для испыта-
ний крупномасштабных моделей одиночных и соосных винтов диаметром до
3 м и натурных одиночных винтов в аэродинамических трубах Т-104 и Т-101.
Результаты испытаний винтов подвергаются контролю и высококачествен-
ной обработке в процессе эксперимента, характеристики винта могут быть пред-
ставлены в виде эмпирико-математических моделей.
76
ЗЛО Требования по акустике
Акустические характеристики винта должны соответствовать нормам шума
ринтовых самолетов на местности в соответствии с международными стандартами,
а также со стандартами, принятыми в отдельных странах и для отдельных аэропор-
тов, где предполагается эксплуатировать самолеты. Максимально допустимые уров-
ни шума, задаваемые обычно ь субъективно воспринимаемых единицах (дБ A, PN
дБ и др.), зависят от взлетной массы самолета Для легких, с взлетной массой 9000
кг и менее, шум измеряется в точке на земле, расположенной на расстоянии 2500 м
от места взлета самолета при его пролете над этой точкой. Уровни шума не должны
превышать 88 дБ А при взлете и 80 дБ А при горизонтальном полете. Для сверх-
легких самолетов, взлетая масса которых равна 400 кг и менее, стандарты на до-
пустимые уровни шума находятся в стадии разработки. В качестве примера можно
указать, что в Германии за допустимый уровень шума для сверхлежих самолетов
предполагается принять 55 дБ А на расстоянии 150 м. Сейчас ведутся работы по
нормированию шума сверхлегких самолетов с учетом времени воздействия шума
Шум винтового самолета может значительно отличаться от шума изолиро-
ванного винта, в зависимости от компоновки винта на самолете. Так, применение
толкающей схемы приводит к увеличению уровня шума на 5... 15 дБ по сравнению с
тянущей схемой. Наличие вблизи винта стоек, крыла и других конструктивных
элементов, особенно перед винтом, также приводит к значительному увеличению
уровней шума винтового самолета. В частности, при расположении винта в следе за
крылом уровни шума увеличиваются на 5... 10 дБ. Поэтому шум самолета при из-
вестных акустических характеристиках винта может быть определен только с учетом
дополнительного шума, который может быть рассчитан для конкретной компонов-
ки винта на самолете. При этом учитываются взаимодействие лопастей винта с за-
вихрениями и вязкими следами, сходящими с элементов конструкции самолета не
ред винтом, а также отражение звуковых волн от твердых поверхностей л их пи-
фракцию.
В ряде случаев могут предъявляться дополнительные требовании по asyc-ыч-'-
ской прочности и ресурсу работы отдельных элементов самолета, находящихся в
зоне больших уровней шума винта.
Методы экспериментального исследования акустических характеристик зиятая
Экспериментальные исследования акустических характеристик винтов прово-
дятся в полете на летающих лабораториях, в аэродромных и стендовых условиях и в
аэродинамических трубах. Наиболее надежные данные получаются при летных ис-
пытаниях самолетов. В этом случае наиболее полно учитываются влияние на шум
компоновки винта на самолете и условия генерации и распространения шума в
свободной атмосфере .
Испытания винтов в аэродромных и стендовых условиях могут дать весьма
Полезную, но ограниченную информацию о шуме винта. Это связано с необходи-
мостью хотя бы приближенного учета влияния грунтового покрытия, которое весь-
ма значительно, и тем, что механизмы генерации шума винта в полете и при отсут-
ствии поступательного движения винта отличаются между собой. Кроме того, при
Испытаниях винтов в стендовых условиях обычно отсутствуют находящиеся вблизи
винта элементы конструкции самолета (фюзеляж, крыло, стойки и пр.), которые
оказывают большое влияние на акустические характеристики винта.
Для разработки винтов с оптимальными акустическими и аэродинамически-
ми характеристиками, удовлетворяющими заданным техническим требованиямиркЬ-la.spb.ru
77
и'яотонляегся серия моделей для испытаний в аэродинамических трубах, -где они Ж
испытываются в широком диапазоне режимов работы на взлете и в полете. Акусти- Ц
ческие измерения проводятся в тех же аэродинамических трубах, где проводятся я
аэродинамические испытания моделей (Т-104, Т-107, Т-5). Хотя существующие W
трубы нс приспособлены для акустических измерений вследствие наличия больше- -f
го числа отоажающих звук твердых поверхностей при отсутствии какой-либо аку-
стической облицовки, измерение шума в зоне плоскости вращения винта, где уров-
ни шума максимальны, дает возможность количественно оцепить влияние основ-
ных геометрических и аэродинамических параметров винта па его шум. К тому же,
при измерениях б ближнем поле (с целью исследования акустических нагрузок от
винта на поверхности фюзеляжа) влияние о I раженных волн на результаты измере-
ний значительно ослабляется.
Акусгические измерения при испытании мелкомасштабных моделей одиноч-
ных и соосных винтов диаметром до 400 мм можно проводить в заглушенной каме-
ре с внутренними размерами 10x5x4 м. В этом случае удается избагиться от помех
вследствие отражений звуковых волн от с юн, пола и потолкз и проводить акусти-
ческие измерения в более широком диапазоне углов направленноети, чем в аэро-
динамических трубах, что дополняет информацию, получаемую при грубных испы-
танная. Здесь особенно удобно исследовал* детальную структуру доля пульсаций
давления на поверхности мотели фюзеляжа самолета.
Акустические требования к моделям винтов
Для переноса результатов модельных акустических измерений на натурные
винты должны быть соблюдены критерия моделирования. К ним относятся геомет-
рическое, аэродинамическое п акустическое подобие модели и натуры. Геометриче-
ское и аэродинамическое подобие требуется и при аэродинамических измерениях.
Акустическое подобие заключается в равенстве в обоих случаях безразмерного аку-
стического давления; рт = - const. 1 те индекс тп означает номер гармоники
рСо
шума вращения, а р и со - соответственно плотность окружающей среды и скорость
звука в ней. Если при испытаниях модели плотность и температура среды отлича-
ются от соответствующих величин при натурных испытаниях, то пересчет произво-
. Ртио.РялтТ~нл _
дится по формуле р _----------—-----. если испытания модели и натуры прово-
РмодТ
мод
дятся в одинаковых атмосферных условиях, что регламентируется нормами при
сертификационных испытаниях, шума самолетов, то в геометрически сходственных
точках измерения уровни звукового давления будут в обоих случаях одинаковыми.
При модельных испытаниях винтов не соблюдается обычно подобие по числу
Рейнольдса. Однако, при отсутствии срывных явлений на лопастях винта это мало
сказывается на результатах акустических измерений.
Краткое описание аэродинамических труб, стендов и другого оборудования,
используемого при акустических исследованиях винтов
Акустические измерения шума винтов проводятся в тех же аэродинамических
трубах и на стендах, что и аэродинамические испытания, и чаще всего одновре-
менно с ними. В заглушенной камере размерами 10x5x4 м установлен винтовой
прибор для испытания одиночных и соосных мелкомасштабных моделей винтов
диаметром до 400 мм. Мощность каждого электродвигателя — 3 кВт, максимальное
78
число оборотов — 9500 об/мин. Подведен воздух от обшей сети давлением 12 ата,
который может быть использован для частичного обдува поверхности модели фю-
зеляжа с целью исследования влияния пограничного слоя на условия распростра-
нения звуковых волн от винта при больших скоростях полета. Максимальный рас-
ход воздуха из сопла - 17 кг/с, максимальная скорость на выходе — 300 м/с. При-
меняемая акусшческая аппаратура при измерении: микрофоны различного диамет-
ра фирмы Брюль и Къер, многоканальные магнитофоны фирмы ’Сопи". Расшиф-
ровка записей и построение графиков производятся при помощи анализаторов и
ЭВМ.
Методы расчетных исследований акустических характеристик винтов
(краткий обзор)
Для расчета акустических характеристик винтов применяются так аналитиче-
ские, так и эмпирические методы расчета. Основой аналитических методов расчета
являются стационарные и нестационарные аэродинамические, силы, действующие
на лопасти винта, которые при акустических расчетах предполагаются известными
из предварительно выполненных аэродинамических расчетов или из эксперимен-
тов. Необходимо также знать геометрические и аэродинамические характеристики
лопасти и винта в целом, его компоновку на самолете и режимы работы.
Наиболее полно акустическое доя? винта может быть описано уравнением
Фокс Вилья мса-Хоу книге а, которое основано на аэроакустическси модели источ-
ников шума:
-v2p=sfp" H<f >] <3-42’
где p - акустическое давление, cq и pc — скорость звука и плотность в невозмущен-
ной среде, V,V2 - операторы, 5(f) — дельта-функция, f — уравнение поверхности ло-
пасти, Vn — скорость элемента поверхности лопасти в направлении внешней нор-
мали, 1, — аэродинамическая сила, действующая на единицу поверхности лопасти,
Тц — тензор вязких напряжений и Н(0 - функция Хевисайда.
Эго уравнение - нелинейное, вследствие наличия в правок части третьего
члена. Левая часть представляет собэй вот новой оператор, определяющий распро-
странение волн, первый и второй члены в правой часта — соответственно акустиче-
ские источники монопольного и дипольного типа. При умеренных дозвуковых
концевых скоростях и для обычных легко нагруженных винтов (с малым числом
лопастей) третьим членом з правой части уравнения (3 42) можно пренебречь, и то-
гда уравнение становится линейным. Имеется много видов решений уравнения
(3.42), ктждее из которых может оказаться наиболее удобным в отдельном кон-
кретном случае.
Для расчета шума в ближнем и дальнем полях удобно ’одъзоваться форму-
лой:
Рга =-^-П?ст(г,1|/)е,(яЛч,+к«оЧ1 -p^PJrBFIMcfriba.vJr^rdrdv, (3.43)
4тгт Га о
где рт — звуковое давление т -й гармоники шума вращения, с1Д(г,ч/) - коэффици-
енты разложения в ряд Фурье нестационарных сил на лопасти, к — число лопастей
винта, = —------“ волновое число, о — фазовый радиус, - азимутальный угол в
со
плоскости вращения винта, М0(т) — осевое число Маха, учитывающее радиальную
неравномерность потока, Ь(г) - ширина лопасти, vpc(r) — угол саблевидности лопа-
сти, S — расстояние от источника звука до точки наблюдения.
www.vokb-la.spb.
79
Расчеты по уравнениям (3,42) и (3,43) дают возможность рассчитывать ак\
стическое давление в ближнем и дальнем полях с учетом детальных геометрических
параметров лопасти (ширина, толщина, саблсвидность) и аэродинамических харак-
теристик винта. При этом учитываются также азимутальная и радиальная неодно-
родность потока перед винтом.
Широкое применение в инженерных расчетах шума винта нашли эмпириче-
ские методы. Они основаны на обобщении результатов измерений шума натурнь--
и модельных винтов. В расчетах используются суммарные характеристики вин г
тяга, потребляемая мощность, число оборотов винта, диаметр и число лопаете
винта.
При расчете шума на местности суммарный уровень шума в точке наблюдс
ния, расположенной на земле, определяется по формуле:
Ь - 15,4 Ig Nв + 38,1 Ми - 20 !g kDB - 201g S + Q, (3.4 ’
где NB - подводимая к винту мощность, Ми - окружное концевое число Маха, к
число лопастей, DB - диаметр винта, С] — константа, зависящая от класса самол
та и типа винта. Затем по специальным графикам или таблицам определяются п<>
правки для расчета уровней воспринимаемого шума. Получаемые в эксперимент^
и аналитических расчетах уровни шума представляются обычно в децибелах (дБ).
Для получения уровней воспринимаемого шума в дБА производится энергетическое
суммирование полученных в октавных полосах частот уровней со следующими по- ,
правками к этим уровням:
f, Гц | 31,5 63 1 125 I 250 500 1000 2000 4000 | 8000 I
AL. дБА I -38 ,_-27_; -16 1 zj... 0 1 1 1 -1 1
Здесь f ~ средняя частота октавной полосы, AL — поправка, прибавляемая, с
учетом знака, к уровню в каждой октавной полосе.
Акустические нагрузки от винта на поверхности фюзеляжа в зоне плоскости
вращения винта могут быть определены по формуле
Lv = 20 ig NB 20 lg(kDe2) - (33,4 - 22,4 M J lg[-^ + C2 , (3.45)
где z — клиренс (расстояние между поверхностью фюзеляжа и концом лопасти вин-
та), С? - константа. Затем из графиков, полученных эмпирическим путем, опреде-
ляются поправки на тональные составляющие и строится спектр шума в каждой
расчетной точке.
При расчете шума сверхлегких винтовых самолетов необходимо учитывать,
что при концевых числах Маха MR>0,5 в спектре шума винта доминируют гармо-
нические составляющие, а при MR<0,5 винт излучает преимущественно широкопо-
лосный шум. Уровень воспринимаемого шума в дБА от гармонических составляю-
щих может быть определен по эмпирической формуле:
ЦдБА]=122 MR+15 lgP-10 lgK-20 lgS+C3, (3.46)
где P - сила тяги винта, С3 - константа. Уровень широкополосного шума опреде-
ляется по формуле:
ЦдБА]=52,5 MR+10 IgP -20 lgS+C4 (3.47)
Складывая уровни, полученные по формулам (3.46) и (3.47) как статистиче-
ски независимые сигналы, получим полный уровень воспринимаемого шума в точ-
ке наблюдения. Формулы (3.46) и (3.47) получены для тянущего винта. Для винтов
толкающей схемы или при наличии вблизи винта каких-либо возмущающих или
отражающих поверхностей уровни шума могут увеличиться на 5... 15 дБ, в зависи-
мости от компоновки винта на самолете.
Следует отметить, что эмпирические формулы (3.44 — 3.47), а также поправ-
ки на спектр шума для высших гармоник, справедливы только для того класса вин-
80
т0В и их компоновок на самолете, для которых они получейы при эксперименталь-
ных исследованиях прототипов. Для других вариантов винтов и их компоновок на
самолете применение приведенных выше эмпирических формул может привести к
большим погрешностям.
З.Н Прочность воздушного винта
Общие положения
Прочность воздушного винта должна быть достаточной, чтобы обеспечить его
безопасную работу в течение назначенного ресурса. Это достигается путем выпол-
нения требований, относящихся к прочности и содержащихся в части 35
“Авиационных правил” (АП - 35) и в пунктах 23-905 и 23-907 АП - 23.
Установление соответствия винта указанным требованиям базируется на
выполнении ряда расчетных и экспериментальных исследований в процессе проек-
тирования и испытаний винта, а также на анализе опыта испытаний и работы вин-
тов, близких по конструкции и назначению, и анализе ожидаемых условий экс-
плуатации винта
Проектирование и испытания воздушного винта
На стадии проектирования винта должны быть выполнены следующие прове-
рочные расчеты’
• расчет статических напряжении. возникающих в элементах конструкции вин-
та, несущих ссновиую на! ручку,
• расчет модальных характеристик лопастей,
• расчет динамических напряжений, возникающих в элементах конструкции
винта и обусловленных неравномерностью крутящего момента двигателя, кг..
сой обдувкой винта, вл» яниех* планера и эволюциями самолета.
Анализ результатов этих расчетов позволяет оценить статическую прочное?,,
винта, предусмотреть возниккгьенке резонансных явлений и оценить возможности
конструкции винта по условиям усталостной прочности
Кроме того, на стадии проектирования должна быть оценена безопасность от
флаттера на режиме работы “на месте” и в полете, а для реверсивных винтсв - лог
реверсе тяги на пробеге. При этом привлекаются сведения по опыту испытаний 1-
эксплуатации винтов, близких по конструкции и условиям работы.
Опытный винт должен быть подвергнут следующим испытаниям:
-испытанйя втулки и узлов крепления лопастей, а у моноблочных винтов -
прикомлевой части, на двойную центробежную нагрузку,
-испытания по определению характеристик усталости элементов конструкции
винта с учетом возможных эрозийных и коррозийных повреждений и изме-
нения свойств материала со временем,
-испытания по непосредственному определению напряжений в элементах кон-
струкции винта на представительном двигателе и представительном самолете,
при этом в зависимости от конструкции винта, его размещения и назначения
самолета тензометрирование элементов конструкции винта должно выпол-
няться на режиме работы “на месте”, а при необходимости - еще в аэроди-
намической трубе или в полете.
Сопоставление статических и динамических нагрузок с учетом их повторяе-
мости, действующих на элементы конструкции винта, с характеристиками устало-
WMg4j.vokb-la.spb.ru
сти этих элементов позволяет установить назначенный и межремонтный ресурс
винта по условиям усталостной прочности.
Соответствие результатов расчетов и испытаний требованиям АП-35 является
необходимым условием получения “сертификата типа”.
Эксплуатация воздушного винта
При постановке воздушного винта на конкретный самолет должно быть по-
казано, что условия работы винта при этом соответствуют ограничениям, приве-
денным в карте данных “сергификата типа”. В том случае, если эти условия нс ук-
ладываются в рамки ограничений и можно ожидать повышенный уровень нагрузок,
следует провести измерения напряжений в элементах конструкции винта.
Если же при эксплуатации винта будут возникать непредусмотренные эрози-
онные и коррозионные повреждения или непредусмотренное влияние климатиче-
ских условий, следует провести испытания на усталость элементов конструкции
винтов с наработке/!.
Ресурс винта по условиям усгалостной прочности уточняется в соответствии с
результатами этих испытаний.
Выполнение указанных, работ является необходимым для сертификации са-
молета.
82
IV. РАСЧЁТ ЛЁТНЫХ ХАРАКТЕРИСТИК ЛЁГКИХ САМОЛЁТОВ
С ВИНТОМОТОРНОЙ УСТАНОВКОЙ
Предлагается типовая (стандартная) методика расчета летных характеристик
ле1ких самолетов с винтомоторной двигательной установкой (с поршневыми и тур-
бовинтовыми двигателями). Мегодика включает достаточно простые и эффектив-
ные методы расчета с учетом требовании авиационных правил АГ1-13 и правил для
особо легких самолетов JAR-VLA, я ~акжс устанавливает объем расчегных исследо-
ваний и форму представления их результатов. Введение типовой методики облегчит
труд разработчикам, даст возможность с единой позиции проводить сравнительные
анализы однотипных самолетов и облегчит проведение экспертных оценок По ме-
ре накопления опыта предлагаемая методика будет совершенствоваться. В каждом
конкретном случае могут проводитося дополнительные нсследозангш с использова-
нием других соответствующих методес расчёта.
4. i Ск&ресгь сваливания
’ Скорость сваливания - это
минимальная скорость горизон-
тального полета, определяемая яри
максимальном сбалансированном
коэффициенте подъемной силы
Vc -- 3,6 - Ж км/ч. (-1.!)
V
Для каждого самолета удобно ее
представлять в виде зависимостей
от массы самолета для крейсер-
ской, взлетной и посадочной кон-
фигураций (рис. 4.1).
По отношению к скорости
сваливания назначаются мини- 4.;
мально-допустимые скорости,
обеспечивающие безопасность полет г. О? скорости сваливания существенно зависят
взлетная и посадочная дистанция. Скорость сваливания при взлете (\-с,) и посадке
(V^) определяется для соответствующих отклонений механизации г рыла при рабо-
те двигателя на малом газе и при наиболее неблагоприятной цзчтровке самолета. В
настоящее время скорость сваливания однодвигательного самолета при посадке со-
гласно АП-23 должна быть не более 113 км/ч, а для особо легких самолетов (JAR-
VLA)
она нс должна превышать 83 х?г/ч. Этим предельном значением скорости
сваливания соответствуют определенные зависимости между нагрузкой на крыло и
коэффициентом с„ (рис.4.2).
> max
www. vokb-la. spb.ru
83
Рис. 4.2
Заметим, что при сертифи-
кации самолетов скорость свали-
вания определяется в полете с не-
большим отрицательным ускоре-
нием V = -0,5 м/с2. В начале
уменьшение скорости до наступ-
ления срыва производится в гори-
зонтальном полете при перегрузке
пу=1. В этот момент скорость дос-
тигает значения, определяемого
выражением (4.1) и называемого
скоростью сваливания по пере-
грузке VCn ](Торенбик Э. “Проек-
тирование дозвуковых самолетов”,
М_, 1983). После этого уменьше-
ние скорости продолжается со
снижением самолета до тех пор,
пока летчик не увеличит угол пи-
кирования для обеспечения
положительного ускорения.
4.2 Взлет
Согласно авиационным правилам (All-23 и JAR-VIA) взлетная дистанция
самолетов определяется с момента их старта до достижения высоты Нсэл =15 м и
скорости V? > 1,3 Vc .
Взлетная дистанция очень легких самолетов не должна превышать 500 м.
Взлетная дистанция состоит из разбега самолета до скорости отрыва
, 2G ~
V0Tn = 3,6 i—— , км/ч и воздушного участка. Значение скорости отрыва находит-
^PScym₽
ся между VC] и V2 . Практически можно принять Votp= VaiT,/VC] = 1,1-? 1,2.
В качестве типовых расчетов для определения длины взлетной дистанции
рассматриваемого класса самолетов рекомендуется следующий алгоритм.
Длина разбега определяется путем вычисления интеграла
_ G vp>_________VdV_________
8 ° P-ro-(4-fcJs^’
где сЛ и сУр принимаются в зависимости от угла атаки крыла при разбеге.
у2 у2 у2 _
Приближенно Lp = Сд’ , где nXc = Рср - f - Хср.
2gI1’‘cP 28П’‘Ср СР
Значения Р = сР(уср) _ fc* ) , определяются при сред-
О' \ р р / ZO / о
ней скорости Vcp=0,7VOTp=0,7 VOTp VCj.
Длина воздушного участка определяется по формуле Т^ЛЕ/ пХ р,
84
Значения Pcp=P/G и сУп =G/qS вычисляются при средней скорости
Vcp = JVoip- Vi, а значение сх снимается с поляры самолета при среднем значении
Су, которое определяется в результате решения следующего трансцендентного урав-
нения
где С =
g’(AE)2'
зру2уОтРу;.
g(AE)2
Длина взлетной дистанции Lp+ L».
Результаты расчетов рекомендуется представлять в виде зависимостей длины
разбега и взлетной дистанции от относительной ( Vorp) или абсолютной (Vorp) ско-
рости отрыва для заданного взлетного веса самолёта и в зависимости о г веса при
заданном значении УО[.. для случаев взлета с бетона и грунта (рис.4.3 и 4.4).
Рис. 4.3
4.3 Посадка
Согласно авиационным правилам (АП-23 и JAR-VLA) скорость захода на по-
садку должна превышать скорость сваливания не менее, чем на 30%, V3Il > l,3VCrj.
Посадка начинается с высоты Нпос=15 м с углом наклона траектории 6ЗП < 0,05 рад.
Посадочная дистанция состоит из воздушного участка и пробега самолета по
взлетно-посадочной полосе (ВПП) до полной остановки. Скорость самолета в мо-
мент касания земли (VKilc) находится между VC(j и Узп. Можно принять
Voc=VKac/VC0=l,bl,2.
ДЕ
Длина воздушного участка определяется по формуле LB =----,
хср
V2 -V2 (1,69 V2 )V2 сх
где ДЕ - Н + зп -с - Н + —_____________________ ---Si п - - Р
ас ас - пП0С + 2g - Ппос 2g ’ Хс₽ су ср'
Значение сх соответствует средней перегрузке, определяемой по формуле
л vokb-la.spb.ru
= 1 + y-fL6"' ’ n кот°рой VCp - /v3n VKac - VLn д/ХЗУ^ •
zb *мюс
При Нпос=15 м, 0ЗП=О,О5 рад и VK.IC“1J перегрузка равна
nv « 1 i 0,000012V* .
Тер ’ со
После определения перегрузки находится значения су^ = пу сУт и по нему с
поляры самолёта снимается с .
Если Ilv sl.TO cv й=С„ и пх = --------7~~\~ РС1,
У‘’ Кср(су„) С|"
При Рср“0 и пу « 1 длина воздушного участка LB=KcpAE.
Среднее значение тяги принимается в зависимости от тяги на участке плани-
рования при заходе на посадку Pcp=i P1LI, где число i может находиться в проме-
жутке между 0 и 1, р|П = —— - езп -
Kim
Длина пробега определяется следующим интегралом
/ GV VdV .
ЕПр - J - ГД +^кас^»
g ° fTG + (с -fTcy )SpV- + P
т 4 xnp т у up' 2 рсв
где
слагаемое V^At учитывает длину пробега самолёта после касания колёс
поверхности ВПП до момента включения тормозных средств,
At - время запаздывания включения тормозных средств (At = 2 -е- Зс),
fT - коэффициент торможения колёс.
Ррев _ реверсная тяга,
сУпр и сХпр - соответствуют углу атаки крыла при пробеге.
Для приближенных расчётов можно использовать следующую формулу
V2 V2 V2
I _ ¥ «ас , хл »*_ v кас Y со , А+
Up " 2g пх Л " 2g пх кас ’
' ср А ср
хРУср ъ Ррев
) - ~ и РпСц— I, - определяются при среднем
4
где %. = fT + \:р + Ррев-
Значения Х:п=(сх - fTcv
Лпр У пр
значении скорости Vcp = OJV^.
Посадочная дистанция составляет Lnoc=LB+LIip.
Результаты расчетов удобно представлять в виде трафиков зависимости длины
пробега и посадочной дистанции от относительной ( VK.K.) или абсолютной (VKac)
скорости касания ВПП при заданном весе самолета и в зависимости от веса само-
лета при постоянном наиболее вероятном значении Vxac для разных значений fT ,
(рис. 4.5 и 4.6).
86
Согласно АЛ-23 само-
лет при взлетном положении
механизации с убранным
шасси и максимальном про-
должительном режиме рабо-
ты двигателей на уровне мо-
ря должен иметь установив-
шейся угол наклона траекто-
рии для сухопутных
самолетов не менее 1/12 рад
и 1/15 рад для гидро-
самолетов и амфибий. Само-
леты с газотурбинными дви-
гателями при взлетном по-
ложении механизации долж-
ны сохранить установивший-
ся угол наклона траектории 6
= 0,04 рад. на высоте 1500 м
при температуре 27°С. Для
ухода на второй круг самолет
при посадочном отклонении
механизации, выпущенном
шасси и при взлетном режи-
ме работы двигателя должен
иметь угол наклона траекто-
рии не менее 1/30 рад. На
рис. 4.7 приведены графики
зависимости потребной тяго-
вооруженности (P = P/G) са-
молета от
4.4 Набор высоты
www.vokb-la.spb.ru
87
Рис, 4.8
Рис. 4.9
его аэродинамического качества при этих постоянных углах наклона траектории.
Графики получены на основании соотношения Р - 0 + —.
К
Расчет набора высоты самолета сводится к определению следующих характе-
ристик:
Р - X
- угла наклона траектории 0 = пх=- и скороподъемности
G
V, = ve = ~ V или V, = 75N^"~N""- (4.21
G 7 G
в зависимости от скорости полета для крейсерской, взлетной и посадочной конфи-
гурации самолета при максимально-продолжительном режиме работы двигателей
(рис. 4.8 и 4.9);
- вертикальной скорости самолета в крейсерской конфигурации (63=0t в за-
висимости от скорости полета для нескольких значений высоты при заданном
(обычно номинальном) режиме работы двигателей (рис.4.10);
- максимальной вертикальной скорости ( Vy^ ) и соответствующей ей наивы-
годнейшей скорости в зависимости от высоты полета (рис. 4.11);
- времени, расхода топлива и дальности в зависимости от высоты полета
(рис. 4.12), которые определяются следующими интегралами:
88
н q
°”ЬхН,н’
(4.3),
lv,
V ан
Tlnm — J .
°Vv™
где чгчасовой расход топлива.
Для некоторых типов самолетов с
целью экономии топлива может ока-
заться необходимым определение наи-
выгоднейшего режима работы двигате-
ля. С точки зрения экономии топлива
режим полета должен обеспечить ми-
нимум следующего функционала
н q.
GT-
о 3,о • V у
где часовой расход топлива qt зависит
аг степени дросселирования двигатель-
ной установки, от скорости и высоты
полета. Степень дросселирования двига-
. теля можно представить в виде отноше-
ния мощности на валу винта (NB) к максимальной мощности (Nmax) при соответст-
вующих значениях V и Н за вычетом мощности, отбираемой для самолетных нужд
(ANOTe)
N= *-
Nmax Not6
Вертикальная скорость, входящая в функционал (4.3), определяется выраже-
нием (4.2), в котором располагаемая мощность двигателя (Np,iCII) равна произведе-
нию мощности NB на коэффициент полезного действия винта (Пэф).
Npacn = Пэф NB ИЛИ с учетом (4.4)
Npacn = Пэф (Nmax-ANoTg) N.
При этом Подинтегральную функцию интеграла (4.3) можно записать в виде
q, о_____________________________________q,(N,H,v)
3,6 V(‘ 3,6 75 ' - Д N^)N - Nno,p '
?F
Условие экстремума этой функции (при заданных V и Н) ---- - 0 приводится
0N
(4.4)
к виду
— Q. —
N-d^c = N„„Ip. «5)
/dN
Для решения уравнения (4.5) доста-
точно иметь дроссельные характеристики
в виде зависимости часового расхода топ-
лива от степени дросселирования двигате-
ля (рис. 4.13) и графики зависимости по-
требной мощности от скорости полета для
нескольких высот. Так как выражение
4t/dqt/dN в (4.5) является подкасатель-
ной к кривой qt(N), то для определения
оптимальной степени дросселирования
(Nopt)> удовлетворяющей уравнению (4.5),
следует на оси абсцисс ( N ) поставить
Рис. 4.13
www.vokb-la.spb.ru
89
точку с координатой Niroip и из этой точки провести касательную к кривой qt(N)
(см. рис. 4.13). Оптимальное значение N соответствует точке касания.
В результате можно построить N и наивыгоднейщую располагаемую мощ-
ность двигательной установки в зависимости от скорости полета для разных высот,
после чего расчет характеристик набора высоты проводится также, как и при лю-
.бом заданном режиме работы двигательной установки, когда располагаемая мощ-
ность является известной функцией скорости и высоты полета. Расчеты показали,
что экономия топлива на участке набора высоты за счет оптимизации режима ра-
боты двигателя может составить до 20%.
4.5 Снижение самолета
Основные характеристики снижения самолета, т.е. дальность полета, время и ко-
личество израсходованного топлива определяются следующими интегралами:
L Елмг 1 = J ДЕ = / - Е„ Их Еи 1 _JS 1-РсрК ’ (46)
1 ЬкрН к
т = J -- -dE = J -г r-dE, (4.7)
Ен V Пх Ь„ (1 Pep-k)v
Ь«сон с Р Ьитон rt Р ♦ К mT = f 77“ = J T-V ДЕ, (4.8) Ея V ПК Ен (1 - Рср - K)V
V2 где Е = Н + —, 2g ,пх = 1 - РсрК.
Для вычисления этих интегралов необходимо иметь связь между скоростью и
высотой полета, на основании которой находятся значения Е. Снижение обычно
происходит при постоянном скоростном напоре, а, следовательно, и постоянном
коэффициенте Су- G/qS. Наибольшая дальность снижения получается при полете с
максимальным аэродинамическим качеством (су = су = const). Минимальное
время снижения самолета (аварийное снижение) достигается при максимально-
допустимом скоростном напоре. Максимальное время снижения, что может ока-
заться желательным в случае ожидания посадки, происходит при значении Су, соот-
ветствующем максимуму функции К^с^ = f(cy) или при максимально-допустимом
значении су (минимальном скоростном напоре). Таким образом, при снижении с
постоянным скоростным напором значения су и К, входящие в интегралы (4.6)-
(4.8). являются постоянными. Определив в этих интегралах значения относитель-
ной тяги Р = P/G, которая при снижении является достаточно малой, и часового
расхода топлива (qt=ccP), можно получить для определения характеристик сниже-
ния следующие приближенные формулы;
L ‘ । _ р ' (Ен _ Екон), (4.9)
L = -• -• (JH - -Uh) > мин, (4.10)
1 ‘ А СР
qt
G’ = «Г • т <411>
1 ГЛба (1 ) н I
ГДе J = 240jq[ g\A 'J + i M™; А=₽/Ро-
90
функция J(H) построена на рис.
4.14 в зависимости от высоты по-
лета для различных значений ско-
ростного напора (q). Значения
Рср и qt р, входящие в формулы
(4.9)-(4.11), снимаются с характе-
ристик двигателей для средней
высоты участка снижения или
принимаются среднеарифметиче-
ское между начальными и конеч-
ными значениями тяги и часового
расхода топлива. При наличии
достаточно подробных характери-
стик двигателей на режиме малого
газа для увеличения точности рас-
Рис. 4.14
чета можно участок снижения
разбить на ряд интервалов.
Для расчета характеристик снижения самолета необходимо иметь поляры са-
молета и средние значения тяги и часового расхода топлива, которые принимаются
на основании характеристик двигателя на режиме малого газа. В зависимости от
желаемого режима полета на участке снижения задается значение коэффициента
подъемной силы, определяются соответствующие ему аэродинамическое качество и
скоростной напор q=G/(Scy). С рис 4.14 снимаются начальные и конечные значе-
ния функции J, и по формулам (4.9)-(4.11) вычисляются искомые характеристики
снижения.
4.6 Крейсерский полет
Для расчета крейсерского полёта необхо-
димы поляра самолета и дроссельные характери-
стики двигателя, которые удобно представить в
виде зависимостей мощности (Nfl) или тяги (Рв)
на валу винта и часового расхода топлива от сте-
пени дросселирования двигателя (рис. 4.15).
Степень дросселирования двигателя можно ха-
рактеризовать частотой вращения вала винта (пв)
или отношением (4.4). Основными характери-
стиками крейсерского полета являются зависи-
мости потребных и располагаемых тяг или мощ-
ностей (рис. 4.16 и 4.17) и зависимостей потреб-
ных степени дросселирования, часового и кило-
метрового расходов топлива от скорости полета
(рис. 4.18). Такие графики строятся для одной
или нескольких высот.
www.vokb-la.spb.ru
91
Рис. 4.16
N
qt
ЧЕ
Рис. 4.18
Для определения располагаемых
тяг и мощностей (Npacn=NB-T|) необхо-
димо иметь значения коэффициента
полезного действия винта, которые за-
висят от скорости, высоты полета ч час-
тоты оборотов двигателя (дроссельного
режима работы двигателя) Пэф
—ПэфС^)Н,пв). ~
Для построения графиков N(V),
Qt(V) и Ql(v) необходимо на рис. 4.16
или 4.17 нанести располагаемые тяги и
мощности для ряда режимов работы
двигателя, которые могут характеризо-
ваться степенью дросселирования ( N )
или значениями пв. Точки пересечения
потребных тяги или мощности с распо-
лагаемыми определяют зависимость
степени дросселирования от скорости
полега (рис. 4.18) Соответственно полученным значениям N с рис. 4.15 снимаются
часовые расходы и определяются километровые расходы топлива (ql—qt/V). Полу-
ченные таким образом значения N, qt и qL строятся в зависимости от скорости по-
лета (рис. 4.18). После определения зависимости qi от V находится наивыгодней-
шая скорость, соответствующая минимальному километровому расходу топлива, и
дальность крейсерского полета самолета для любой заданной скорости
L
«г ’
где GTKp- количество топлива, расходуемое в крейсерском полете. Значение GTltp
находится из баланса общего количества топлива (GT), размещаемого на самолете,
и расхода его на отдельных участках полета
Gr = GTb3iI +GTjia6 +GTtp +GTcH +Grnoc +GTa(U (4.12)
где Спил- количество топлива, затрачиваемое на взлет самолета до начала набора
высоты;
Сгиаб- количество топлива, затрачиваемое на набор высоты самолета;.
92
GJcj!- количество топлива, затрачиваемое
на снижение самолета до начала посадки;
Gi пос " количество топлива, затрачиваемое
на посадку самолета;
Gjaiu" аэронавигационный запас топлива
При заданной дальности полета (L)
GTi,p“ Qi/L-Lj^g-Lcn), (4.13)
где Ьнлб" дальность участка набора высоты,
Ци- дальность участка снижения
Практически для каждого самолета
удобно иметь зависимости между дальностью
и количеством топлива для различных высот
и выбранных крейсерских скоростей полета
(рис 4.19). Связь эта находится на основании соотношений (4.12) и (4.13) с учетом
соответствующих затрат топлива на указанных участках полета и значений Llia6 и
Ц.н, зависящих от высоты полета.
При постоянном удельном расходе топлива (cc=const) минимальный кило-
метровый расход топлива и соответственно максимальная дальность полога самоле-
та с поршневыми двигателями получается при постоянном коэффициенте подъем-
ной силы, соответствующем максимальному аэродинамическому качеству
Супр1 = СУкпш
Максимальная продолжительность полета, что важно для патрулирования са-
молета, осуществляется при коэффициенте подъемной силы, соответствующем мак-
симуму функции
с 3,1
K^7 = 4- = f(C>).
сх
Эта функция строится на основании поляры самолета или зависимости аэродина-
мического качества от коэффициента иу (рис. 4.20). При постоянном среднем зна-
чении величины продолжительность крейсерского полета определяется по
формуле
Т.150 F
t 2 Ce • Gkoh
Для некоторых самолетов может оказаться важным обеспечение минималь-
ных расходов на полет (стоимости полета), которые обычно представляются в виде
линейной функции от количества расходуемого топлива и времени полета
C-AGGr+ArI, (4.14)
гле AGt и дт - постоянные коэффициенты.
Коэффициент Ао, представляет собой стоимость единицы топлива, а Ат- стои-
мость одного часа полета, в которую входит зарплата летного состава и другие со-
ответствующие расходы. Заметим, что при Ат“ 0 функция (4.14) является пропор-
циональной количеству топлива, и ее минимум совпадает с минимумом расхода то-
плива, а при Л(Л - 0 минимум функции (4.14) соответствует минимальному време-
пи полета, т.е. полету с максимальной скоростью
Оптимальное значение коэффициента подъемной силы находится из условия
оптимальности ((КусЦ = 0), которое приводится к виду:
www. vokb-la. spb.ru
93
dcv ]
К —=D (4.15)
dcj '
(4.16)
где
\ pS
Рис. 4.21
сительной стоимости полетов
Левая часть этого уравнения являося
функцией Су и может быть построена
на основании поляры самолета
(рис. 4.21). Значение су^_ снимается с
этого графика по значению параметра
D, как показано на рис. 4.21. При D=0
решением уравнения (4.15) является
коэффициент подъемной силы при
максимальном аэродинамическом каче-
стве cv - cv . Это значение нахо-
дится в точке пересечения функции
Fj(Cy) с осью абсцисс (рис. 4.21). Зна-
чение D=0, как видно из (4.16), может
быть только при A,=0, когда минимум
функции (4.14) соответствует мини-
мальному расходу' топлива. Поскольку
функция монотонно убывающая, то с
увеличением параметра D оптимальный
коэффициент подъемной силы умень-
шается.
При сравнительных оценках раз-
личных аэродинамических компоновок
самолетов или оценках эффективности
совершенствования самолета с точки
зрения наименьших расходов (4.14)
удобно использовать выражение отно-
С
С2 к,opt Р2 )2opt ъ 1
с,-к2оя п, (к^)1да + 1-
где величины с индексами "1” и ."2" относятся соответственно к сравниваемым са-
молетам. Значения су^ и су^ удовлетворяют уравнению (4.15) и определяются
изложенным выше способом. Значения Kiopt и K2oflt соответствуют оптимальным
значениям коэффициентов Су.
4.7 Установившейся разворот самолета в горизонтальной плоскости
Установившийся разворот самолета в горизонтальной плоскости (вираж)
происходит с постоянной скоростью и постоянной перегрузкой. Основные характе-
ристики разворота определяются по следующим формулам:
V2
радиус виража RB = —.. — ;
Sy пу ~ 1
94
время
расход топлива
мощность на валу винта
тяга
коэффициент подъемной силы
Рв VB
75пэф
Рв - сх qS = пу ~
где Т - угол разворота;
qt = сс Ne- часовой
расход топлива;
сУт = G/qS - коэф-
фициент подъемной силы
в горизонтальном полете
у (2G^_ pG~
“ у pS су VPScy,„
скорость виража;
1
у - arccos---угол
Пу
Рис. 4.22
крена.
Все основные характеристики (RB, Тв, GTb, Р6, Nb, су) строятся в зависимости
от скорости полета для одного (рис. 4.22) или нескольких значений перегрузок.
Для некоторых самолетов специального назначения, в том числе сельскохо-
зяйственных, пожарных, патрульных, беспилотных, в процессе работы приходится
делать много разворотов, и поэтому эти развороты желательно совершать с мини-
мальным расходом топлива. Используя приведенные выше формулы, определение
расхода топлива можно свести к вычислению следующей функции двух перемен-
ных Пу и су
_ 2 _с£____1____пу2
Тв " 75gpS Key
Необходимое условие экстремума 6GT/<5ny -0 определяет оптимальное зна-
чение перегрузки пУор( = V2 » 1,4.
' Оптимальное значение Су соответствует максимальному значению функции
К су =f(cy). Стационарная точка экстремума этой функции может находиться за
пределами допустимых значений коэффициента подъемной силы. В этом случае в
качестве оптимального значения су при развороте самолета можно считать макси-
мально-допустимое сУчя ~ сУдот.
Если разворот самолета производится при заданной скорости (V=const), а,
следовательно, при заданном сУгп, то переменные су и пу являются связанными ме-
жду собой соотношением Су =сУга - пу, и условие оптимальности dGT> /dcy =0 или
dGT /dny =0 с учетом этой связи можно привести к следующему уравнению, опре-
деляющему оптимальное значение су;
(4I8)
I х
www. vokb-la. spb.ru
95
ч dc-
1лесч«=^-.
Для решения этого уравнения удобно левую часть его построить на основа
нии поляры самолета в зависимости от су (рис. 4.23). Оптимальное значение коэф-
как показано на рис 4.23.
При аппроксимации поляры са-
молета в виде сх = сХо + Ас у из уравне-
ния (4 18) следует
п, = J2 4 fC’-^ J
* с>.„ i I с>™ j
Определив суо(л для ряда значе-
ний с>га , можно найш и построить все
оптимальные характеристики разворота
в зависимости от скорости полета.
Необходимо отметить, что опти-
мальные значения пУор< получаются
сравнительно большими (пУо[я>1,4) и
увеличиваются, как видно из рис. 4 23 с
уменьшением сугат.е. с увеличением
скорости полета. Практически они не
всегда могут быть реализованы. В таком
случае в качестве оптимальных являют-
ся максимально-допустимые перегрузки.
4.8 Оценка маневренных свойств спортивных самолетов
Маневренные характеристики самолетов зависят от продольной (пх) и нор-
мальной (пу) перегрузок. Связь между ними находится на основе поляры самолета.
Используя выражение вертикальной скорости Vy=V-nx и угловой скорости разворо-
та самолета в горизонтальной плоскости
Ю = v = ^/n/-l (4.19),
можно установить связь между Vy и о.
Маневренные возможности самолета удобно представить в виде графиков за-
висимостей пх и Vy от скорости или коэффициента подъемной силы в горизонталь-
ном полете сУт =G/qS для различных значений пу и результирующего графика за-
висимости УУоад от о (рис. 4.24). Причем, значения со определяются по формуле
(4.19) при пу и V, соответствующих Vv^ .
96
Значение Vy на оси координат (и=0) этого графика соответствует макси
мальной скороподъемности самолета в вертикальной плоскости. Значение и на оси
абсцисс (Vy=0) является угловой скоростью разворота самолета в юризонтальной
плоскости. Участок кривой выше оси абсцисс характеризует пространственный
маневр набора высоты с разворотом, а ниже - снижение с разворотом Графики
Vy = f(co) удобны для сравнения маневренных свойств различных самолетов и
оценки их совершенства.
wwr?7okb-la. spb.ru
V. АЭРОДИНАМИКА ОРГАНОВ УПРАВЛЕНИЯ
5.1 Эффективность органов управления самолета
Для продольного управления дозвуковых самолетов нормальной схемы ис-
пользуется, как правило, горизонтальное оперение с рулем высоты. Эффективность
горизонтального оперения и расположенного на нем руля высоты зависит не толь-
ко от площади оперения и расстояния его до центра масс самолета, но и от аэро-
динамических характеристик горизонтального оперения, т.е. от его несущих
свойств.
Важнейшей аэродинамической характеристикой горизонтального оперения,
определяющей его несущие свойства, является производная коэффициента подъем-
ной силы горизонтального оперения по углу его атаки с“~. Величина этой про и <-
водной в значительной степени зависит от геометрических параметров горизон-
тального оперения: от его удлинения Хп>, угла стреловидности Хпк.го, сужения т]го и
относительной толщины и формы профиля. Наибольшее влияние на величину
производной с“~ оказывает удлинение и угол стреловидности.
Для небольших малоскоростных самолетов обычно используется нестрело-
видное горизонтальное оперение с удлинением Х.го=3,5-г5, сужением qro=l >2 и с от-
носительной толщиной профиля с = 10% -ь 14%. Компонуется горизонтальное опе-
рение, как правило, из профилей С-Нс и NАСА-00.
Для самолетов АОН применяются рули высоты с габаритными хордами от
35% до 45% хорды горизонтального оперения. При проектировании рулей высоты
желательно выполнять условия постоянства относительной хорды руля по размаху
оперения Ьь — const, так как, в противном случае, усложняется силовая конструк-
ция неподвижной части горизонтального оперения, и заметно изменяется, как бу-
дет показано ниже, величина производной m'i. i
Одним из основных требований, предъявляемых к аэродинамическим харак-
теристикам органов управления при их достаточной эффективности, является обес-'
печение монотонного прироста продольного момента по углу отклонения органа
управления во всем летном диапазоне углов атаки и скоростей полета. >
Эффективность руля высоты оценивается величиной максимального прира-
щения коэффициента продольного момента AmZmai, которое можно создать при его'
отклонении, и величиной производной mz" на линейном участке зависимости mz =)
f(5„). |
Эффективность органов продольного управления должна сохраняться до<
больших закритических углов атаки самолета и'быть достаточной для вывода само-г
лёта из этой области на безопасные режимы полёта. |
С увеличением удлинения горизонтального оперения величина производной
с£. возрастает (рис. 5.1) особенно интенсивно при от 0 до 5. t
Зависимости сУго= Ц^го), приведенные на рис. 5.1, получены расчетным пу-
тем для изолированных несущих поверхностей.
На рис. 5.2 показано влияние удлинения на экспериментальные зависимо-
сти сУ1, k-f(a) изолированной несущей поверхности до углов атаки а=30°.
Видно, что с увеличением удлинения от Х=3 до Х=4,5 наклон зависимости
cyi=f(a), характеризуемой величиной производной с“ , возрастает примерно из
20% от значения сУ1 =0,056 до 0,068.
98
Рис. 5.1
С увеличением удлинения несу-
щей поверхности, скомпонованной из
одних и тех же профилей, аэродинами-
ческое качество возрастает. Для иссле-
дованного нестреловидного горизон-
тального оперения при ц1О=1 с увеличе-
нием удлинения от 3 до 4,5 максималь-
ное аэродинамическое качество возрас-
тает примерно на десять единиц, мак-
симальные несущие свойства оперения
Суготм практически не изменяются, а
критический угол атаки, на котором
достигается сУгош1х, уменьшается при-
мерно на 2°.
С увеличением удлинения гори-
зонтального оперения возрастает также
эффективность руля высоты, характери-
зуемая величиной производной
с®^ (рис.5.3).
Существенное увеличение несу-
щих свойств горизонтального оперения
при отрицательных углах аго можно по-
лучить за счет модификации носовой
части горизонтального оперения, на-
пример, за счет отогнутого носка про-
филя горизонтального оперения. В ка-
честве примера, на рис. 5.4 показано
влияние отогнутого вверх носка гори-
зонтального оперения на его несущие
свойства. Можно видеть, что при ис-
пользовании модифицированного иро-
0.02 -
0.01 ------1---1------।---1----1----Г
1 2 3 4 5 6 Аго
Рис. 5.3
= модифицированный
профиль NАСА-0010
-1.5
Рис. 5.4
www. vokb-la. spb.ru
филя NACA-0010MK максимальные несущие свойства горизонтального оперения
можно увеличить на ACyrj<-0,4, а критический угол атаки примерно на 6° - 7°.
Как показали проведенные экспериментальные исследования, отогнутый но-
сок оперения практически не влияет на шарнирный момент руля высоты.
Влияние осевой аэродинамической компенсации и формы ее профиля на
эффективность руля высоты показано на рис. 5.5.
Из рассмотрения эксперимен-
тальных зависимостей видно, что в
диапазоне малых углов онслонения
руль высоты с осевой аэродинамиче-
ской компенсацией SOK^0.3 hmcci
большую на -14% эффективность по
сравнению с рулем, выполненным с
конструктивной компенсацией при
одинаковой относительной! хорде за
осью вращения К'ь = 0,2.
Производная с®“ практически
не зависит от формы профиля осевой
компенсации.
С увеличением относительной
площади осевой компенсации, а так-
же с изменением полноты ее профи-
ля, заметно изменяется эффектив-
ность руля при больших углах его
отклонения. Так. например, если
эффективность руля высоты с конст-
руктивной компенсацией сохраняется
до углов отклонений 5Ь“ - 30°, то
для руля высоты с осевой компенса-
цией SOK=0,3 и формой профиля
"окружность" эффективность руля
St, = - 18°. С уменьшением полноты
профиля осевой компенсации увеличивается максимальный угол отклонения руля,
до которого сохраняется его эффективность. При этом также увеличивается макси-
мальное приращение подъемной силы на горизонтальном оперении от отклонения
руля, по сравнению с рулем высоты, имеющим более полную форму осевой ком-
пенсации.
Отметим, что наличие осевой компенсации заметно увеличивает приращение
лобового сопротивления Дсх от отклонения руля, начиная с углов, при которых
наблюдается падение эффективности руля Причем, чем полнее носок, тем более
заметным становится это увеличение (рис. 5.5).
Кроме того, положение второго аэродинамического фокуса по хорде горизон-
тального оперения практически не изменяется с увеличением осевой компенсации
руля до S™= 0,3
Влияние относительной хорды руля высоты за осью вращения К’ь на его
эффективность показано на рис. 5 6 в виде расчетных зависимостей с®*о в функ-
ции b'h- Эти зависимости построены для двух удлинений изолированного горизон-
тального оперения 5 и 3.
100
2 3 4
Рис 5.6 Рис. 5.7
Как показали расчетные и экспериментальные исследования, величина про-
изводной пропорциональна л/'Ь'* в диапазоне изменения oi 0 до 0,5.
Указанное влияние основных геометрических параметров горизонтального
оперения и руля высоты на несущие свойства оперения и эффективность руля вы-
соты можно в равной степени использовать также и для оценки эффективности
руля направления и элеронов.
Влияние удлинения вертикального оперения на его эффективность показано
на рис 5.7. а влияние расположения горизонтального оперения по высоте верти-
кального оперения на эффективность вертикального оперения дано на рис 5.8.
Эффективность руля высоты в линейной области изменения зависимости
характеризуемая производной т®в при постоянном угле атаки, может
быть определена по формуле:
= - К10АгоСу’го
(5.1),
wwWbkb-la. spb.ru
К1О- коэффициент, учитывающий торможение потока перед горизонтальным
оперением. Средняя величина коэффициента при расположении горизонтального
оперения на вертикальном обычно принимается равной 0,95, а при расположении
i оризон зальною оперения на фюзеляже 0,9,
Лго= 7^'° “ коэффициент статического момента площади горизонтального
S Од
оперения,
Су^- производная, характеризующая эффективное^ руля высоты для изоли-
рованного юризонтального оперения
Величину производной в общем случае можно определить по формуле.
п« cos Ь <5*2)
где
с“™- производная, характеризующая изменение подъемной силы изолиро-
ванною юризонтального оперения в функции угла атаки юритотального опере-
ния,
пв - коэффициент относительной эффективности руля на профиле, опреде-
ляется с графика, приведенного на рис. 5.9,
Хов - угол стреловидности по оси вращения руля высоты:
F - функция, учитывающая влияние перерыва между левой и правой полови-
нами руля высоты.
График функции F=f(zo) приведен на рис 5.10
Рис. 5.9
„ _ z0
Здесь: z0 ~ —
1 го
Принятые геометрические обозначения в формулах 5.1 и 5 2 показаны на
рис. 5.11.
102
Ьл го + Гл
Sjo = 2 ^го
. Ьо,.
sro’ Л'о=
аго= tg/lte
2( bn,.- Ьк™
Ьаго= 3|Ь010 * Ьк.о
'?2 (t>0io - Ьд г<>)
ЛГО= ~ boZ> - Ьк’
Ьо» + ^>kJJ
Sb = э — - габаритная площадь руля высоты
S'n - Ь ”* - площадь руля высоты за осью вращения
SOK - SB - S'B - площадь осевой компенсации
с _ Sok р _ §рК
°к - Sb , Ьрк =
Рис. 5.11
Для определения произ-
водной су\ можно воспользо-
ваться также зависимостями,
приведёнными на рис. 5.3.
Эффективность руля направ-
ления в линейной области
изменения зависимости
my=f(5H) характеризуется про-
изводной niyH при постоян-
ном угле атаки и скольжения.
Величину производной niyH
при а=р=0 можно определить
по формуле:
т;«= - К™ (5
где:
Рис. 5.12
Кво - коэффициент, учитывающий торможение потока перед вертикальным
оперением. Средняя величина коэффициента К1Ю « 0,95 - 0,9;
S L
Вво ~ ~ коэффициент статического момента площади вертикального
оперения,
www. vokb-la. spb.ru
103
Кф
t fl-
05 _
О 1
производная, хдракгсри тующая эффективности руля направления верти-
кального оперения, определяет приращение боковой силы на вертикальном
оперении, установленного на фюзеляже, от отклонения руля направления
Пи
07
06-
05
04-j
О 3 -I
02 I
О 1
02 03 04 05 Ь н
Рис 5 14
Значения производной сь/^ ртс-
счигываются по формуле
с?во ~ C=L 11W Кф Ку (5 4),
где
с? - производная, характеризующая
эффективность вертикально! о опсое-
ния, приведена в функции л,Н) ?ф
рис 5 7 Здесь
лво )ф”^-но К; Кт
Коэффициент Ki определяется с гра-
фика рис 5 12 и коэффициент К? с
рис 5 13
Коэффициенты п„ Кф, Ко vi«-
"о2 03 04 05 0 6 0 7 0 8 5ф
редетяются по графикам рис э 14
5 15, э 10
Коэффициент Ка учитывает от-
носительную высоту расположения
корневой хорды руля направления над
фюзеляжем (см рис 5 17) При нали-
чии перерыва в средней части рутя
направления (при 1тП|1=0,1-0,15) ко-
эффициент Ко нужно дополнительно
умножить на 0,85 - 0,75
О 24
Принятые геометрические обо-
значения в формутах (5 3) и (5 4) по-
казаны на рис 5 17
Эффективность элеронов в ли-
нейной области изменения зависимо-
сти m4=f(63) характеризуется произ
водной шск' при постоянном угле а га-
ки
‘----------т----------г— <=- о 14
0 5 1 О у Ьэ
——— профиль СР 7с 9 _____1____[----г-----,----!-э
СР-11-12 0 0 1 02 03 04 05 ' а°
СР-11 15
Рис 5 18
Рис з 19
www.vokb-la.spb.ru
105
Ьк
Ь». <• Ь,
2
- габаритная площадь элерона
Ь'оэ + b\j
2
- площадь элерона за осью вращения
. с _ с< с — ®^к2. j — з _ *
ЙОкз-Ь, Sj , /, ^р/> Л - S3
S’ = «э, n’= “
* t>X
от оси симметрии
Рис 5 20
Величину производной mJ’ в общем случае при одновременном отклонении
двух элеронов при а=0 можно определить по формуле
Гох3 = - 2 Ьо Фь (I-7j zFj) cos2xOBJ (5 5),
где bo - определяется по графикам на рис 5 18
Величина ФЛ в зависимости от t|j и приведена на рис. 5.19.
Здесь
Пэ -сужение крыла на участке, обслуживаемом элероном,
-удлинение крыла на участке, обслуживаемом элероном, а величина
ао=5,6,
SJ-площадь крыла, обслуживаемая элероном,
S -площадь крыла,
-относительный размах элерона.
2Г,= 0,58,
Хою"Угол стреловидности по оси вращения элерона
Для стреловидных крыльев величину удлинения на участке элерона для опре-
Г
cosx0B/
деления коэффициента фй следует брать равной =
Принятые геометрические обозначения в формуле (5 5) показаны на рис 5 20
Двухзвенный орган управления применяется, главным образом, для сущест
венного увеличения эффективности продольного или путевого управления самоле
тов
Дтя анализа эффективности и шарнирных моментов двухзвенною органа
управления используем результаты экспериментальных исследовании крупномас-
штабной модели изолированного хвостового оперения (МИХО) в аэродинамиче-
ской трубе Т-101 ЦАГИ с двухзвенным рутем направления Схема вертикального
оперения с двухзвенным рулем направления показана на рис 5 21
106
Рис 5 22
Вертикальное опе-
рение имело удлинение
Хво=1, сужение цво=2 и
угол ыреловидности по
линии 1/4 хорд %ВО=35°
Скомпоновано оно из
симметричною профиля
С IIс с огносшельной
максимальной юлщинои
с = 12%
Двухзвеиный руль
направления состоит из
первою звена с огноси-
течьной хордои за осью
вращения Ь'„,—0,35 и
второго с относительном
хордои К',,, =0,15 Пер-
вое звено руля направле-
ния выполнено с конст-
руктивном компенсацией
(КК), а второе - с осевой
аэродинамической ком-
пенсацией SOK и =0 25 с
формой профиля осевой
компенсации в виде
"эллипса-100"
Эффективность
двухзвенного руля на-
правления показана на
рис 5 22 в виде зависи-
мостей Ас/ва = ^6н)
Здесь Лс ^(б|)2) характе-
ри зует приращение боко-
вой силы на вертикаль-
ном оперении при от-
клонении второго звена
при 5Н =0, а Дс^(5Н1) -
приращение боковой си-
лы на вертикальном опе-
рении при отклонении
первого звена при 5Н =0
Зависимость
Ac7bo(6Hi +5н,) характе-
ризует эффективность
двучзве иного руля на-
правления Эти зависи-
мости получены при од-
новременном отклоне-
нии первого и второго
звеньев в одну сторону
WMpg.yokb-la. spb.ru
Hi одинаковые уи;ы - о, Пр шило отсчет». умов л„ и б показано на
рис 5 22
Из приведенных экспериментальных результатов видно что с увеличением
относительном хорды руля направления, более чем в два раза (от 15% до 35%), эф-
фективность руля направления возросла примерно на 80% При отклонении двух
звениого руая направления рассмотренною вертикального оперения эффективность
его характери3)емая производном с^п г>, увеличилась более чем на 50% по сравне
нию с эффективностью, полученной для руля с относительном хордой К'„ =0 35
Эффективность двухзвенного органа управления, например, руля высоты в
визе приращения продольного момента Дш/а или руля напр1вления в виде при-
ращения момента пути Дщ¥ можно оценить по формулам
Ani,d — -К|ОА1О(Су^ 5В а су 6Bj )
ДпТу — КвоВно(Су^би + сУ1ю5„ )
где
К1О и KiU) - коэффициенты, учитывающие торможение потока соответственно
перед горизонтальным и вертикальным оперениями,
Аго и Вад - коэффициенты статического момента соответственно площади го-
ризонтального и вертикального оперений,
с"‘и,с^' с/2 и Су" производные, характеризующие эффективность первого и
второго звеньев руля высоты ( направления) изолированного горизонтально! о
(вертикального ) оперения при раздельном их отклонении
йВ1, 6U SH и оН2- углы отклонения первого и второго звеньев соотвеплвен-
но руля высоты и направления
5.2 Коэффициенты шарнирных моментов органов управления самолета
Общими требованиями к характеристикам шарнирных моментов при ручном
управлении являются
а) обеспечение монотонного изменения коэффициентов и1ш п0 vr;n атаки
(скольжения) и углу отклонения органа управления,
сч г.
б) обеспечение соответствующего соотношения между —— для рутя высоты,
тш““ т„ь
——- для руля направления и ---- для элеронов,
«Ч п4\
в) недопустимость перекомпенсации по углу отклонения органа управления и
по углу атаки (скольжения)
Коэффициент шарнирного момента рассматриваемого органа управления
(руль высоты, руль направления и элерон) определяется как
где
МН1- размерный шарнирным момент органа управления относительно оси
вращения |кгм|,
S' - площадь органа управления за осью вращения (м21,
108
b а средняя аэродинамическая хорда за осью вращения органа управления
по перпендикуляру к его оси вращения ]м],
q - скоростной напор набегающего потока [кг/м2]
Определение коэффициентов шарнирных моментов через площадь и сред-
нюю аэродинамическую хорду за осью вращения органа управления бочсх удойно,
чем через габаритную площадь и хорду, поскольку при сравнении коэффициентов
рассматриваемого органа управления с одинаковой относительной хордой и
площадью та осью вращения при рчничнои степени осевой аэродинамическом
компенсации отношение этих коэффициент» будет пропорционально отношению
размерных шарнирных моментов
Размерный шарнирный момент ортана управления в общем виде может быть
представлен как
для руля высоты
МШв = К10 (тш> + m“7aro + т^6в •* mJ, j)SB b'ABi q (5 7),
для ру 1я направления
М„ ( = Ktt, (mulo + + mJ; Б„ + m^xJS;, b'A„ q (S 8)
для элерона
МиЦ =(«Пш0 + + тш 5; + т^ t)S; b A, q (5 9)
где
Кгои ^вс" коэффициенты торможения потока соответственно перед гооп-
зонтальным и вертикальным оперениями,
тш,- нулевой коэффициент шарнирного момента рутя высоты при
аго = 5В = °,
m Шш,’ производные коэффициента шарнирного момента рутя
высоты соответственно по углу атаки горизонтального оперения, по vi iv о пионе
ния руля высоты и по утту отклонения сервокомпенсатора (триммера) рчя высоты
а1О, 6Б ит- соответственно угол атаки горизонтального огеренил угод от-
клонения руля высоты и угол отклонения сервокомпенсатора (триммера) ручя вы-
соты [град|,
тШо- нулевой коэффициент шарнирного момента руля направления при
Рио = 5Н = О
m«" и т^- производные коэффициента шарнирного момента руля
направления соответственно по углу скольжения вертикального оперенич, по угчу
отклонения руля направления и по углу отклонения сервокомпенсатора (триммера)
руля направления,
Рво’ бн и т - соответственно угол скольжения вертикального оперения, угол
отклонения руля направления и угол отклонения сервокомпенсатора (Гриммера)
руля направления, [град],
тшо - нулевой коэффициент шарнирного момента элерона при
а = 8Э = О,
гПщ > и Щщ “ производные коэффициента шарнирного момента элерона
соответственно по углу атаки крыла, по углу отклонения элерона и по углу откло-
нения сервокомпенсатора (триммера) элерона,
а , Бэ и т- соответственно угол атаки крыла, угоч отклонения элерона и угол
отклонения сервокомпенсатора (триммера) элерона, [град]
Вышеуказанные производные характеризуют коэффициенты шарнирных мо-
ментов органов управления лишь в области малых значении соответствующих^^ bru
лов
109
Для обеспечения нормальных усилий при ручном управлении необходимо
обеспечить отрицательные значения производной щ*;,, mJrH и m?n\.
Как правило, характеристики шарнирных моментов органов управления из-
меняются нелинейно с изменением углов атаки, углов скольжения и углов огкло-
нсния органов управления, особенно замел но при наличии осевой аэродинамиче-
ской компенсации. Поэтому, при расчете усилий необходимо знать и характер из-
менения зависимостей щИв, шШн и 1пш,= f (а, 0, b) во всем летном диапазоне из-
менения соответствующих углов.
Кроме тою, указанные в формулах производные ш“^, и т*’,э характе-
ризуют изменение шарнирных моментов при неотклоненных органах управления, а
производные mi*,, m^ir и п?ш', При нулевых значениях углов атаки и скольжения.
Отклонение органов управления влияет на характер изменения тш в функ-
ции а или 0, а угол атаки и скольжения - на характер изменения m(II в функции
соответствующих углов отклонения орюнов управленття
Наиболее существенное влияние на коэффициенты шарнирных моментов ор-
ганов управления оказывает аэродинамическая компенсация, относите |ьная хорда
за осью вращения рассматриваемого органа управления, относительная толщина и
форма профиля крыла, горизонтального и вертикального оперении.
Кроме того, коэффициенты шарнирных моментов органов управления суще-
ственным образом зависят от утла стреловидности оси вращения органа управле-
ния, ст отклонения взлетно-посадочной механизации крыла, от интенсивности об-
дува работающего винта и от числа Рейнольдса
Достаточно надежные характеристики шарнирных моментов органов управ-
ления в необходимом диапазоне углов а , 0 и 5 могут быть получены при испыта-
ниях соответствующих моделей самолетов в аэродинамических трубах
К моделям, предназначенным для измерения шарнирных моментов в аэроди-
намических трубах, предъявляются жесткие требования по геометрическому моде-
лированию. особенно, по точности выполнения величины и формы профиля аэро-
динамическом компенсации и вырезов в аэродинамической компенсации. Эти тре-
бования не всегда могут быть выполнены на полных моделях самолетов, предна-
значенных для испытаний в аэродинамических трубах НАГИ Т-102 или
Т-103 из-за малого масштаба моделей.
С целью получения более надежных и достоверных экспериментальных ре-
зулыагов по измерению шарнирных моментов органов управления необходимо
проводить экспериментальные исследования в аэродинамических трубах Т-102 и
Т-103 на моделях изолированного хвостового оперения и на моделях изолирован-
ного полукрыла, что позволит значительно увеличить масштаб моделей.
Высокая точность определения шарнирных моментов получается при испы-
таниях крупномасштабных моделей самолетов в аэродинамических трубах ЦАГИ Т-
101 или Т-104, особенно при испытаниях натурного самолета с работающим двига-
телем в аэродинамической трубе Т-101.
Для уменьшения шарнирных моментов органов управления в качестве аэро-
динамической компенсации, как правило, используются осевая аэродинамическая
компенсация, роговая компенсация и сервокомпенсация.
110
Осевая аэродинамическая компенсация характеризуется относительной пло-
щадью SOK - отношением части площади, расположенной перед осью вращения, к
габаритной площади органа управления, или относительной хордой осевой ком-
пенсации bOh - отношением хорды осевой компенсации к габаритной хорде органа
управления, а также формой ее профиля.
На рис. 5.23 в качестве примера, показаны часто применяемые варнаты
форм осевой аэродинамической компенсации, выполненные в виде "окружное ги",
"параболы-100”, "эллипса-100" и в виде так называемой конструктивной компенса-
ции.
Рис 5 23
Построение и координаты вышеуказанных форм профиля осевой компенса-
ции следует выполнять по формулам, представленным ниже
Вариант "окружность" определяется радиусом вписанной окружности:
к»кр“ -------------------------jl2 + b“l8"- , [ММ| (5.10)
cos - +tg -(1 + sin “)
Вариант "параболы-100" определяется до формуле.
упр= 2hrvx - (2hj - h2)x, [мм] (5.11)
Вариант "эллипс-100" определяется по формуле.
Ух1=Ь2\,1 (1-xf + —-tg|sm(180x), [мм[ (5.12)
л 2
Вариант “конструктивная” компенсация имеет форму носка, выполненную в
виде вписанной окружности с центром на оси вращения рассматриваемого органа
управления, и определяется по формуле:
RKK - Ifccos^ , [мм] (5.13)
www. vokb-la. spb.ru
В формулах (5.11) и (5.12) отно
сительная координата х = - -. Обозна- Л
О ок 1
чсния остальных величин, входящих в
формулы 5.10, 5.11, 5.12и 5.13, приве-
дены на рис. 5.23. В этих формулах вес
линейные размеры подставляются в
миллиметрах. Координата х задастся
также в миллиме ipax с любым
(произвольным) шшом от 0 до X = bQK
Влияние величины относитель-
ной площади осевой компенсации и
формы ее профиля показано на рис.
5 24 - 5.28. Здесь, для примера, приве-
дены зависимости Am1(in=f(alo, бп), по
лученные из испытаний модели изо-
лированного горизонтального опере-
ния с удлинением Х1О =5, сужением
т]1О“2 и углом стреловидности по пе-
редней кромке равным %пк = 15° с
симметричным профилем С-lie с oi-
носительной толщиной С = 10-8%.
Руль высоты имел относительную хор-
ду за осью вращения Ь'ок = 0,2 Из-
менение величины осевой компенса-
ции осуществлялось за счет увеличе-
ния хорды руля впереди оси вращения.
С увеличением относительной
площади осевой компенсации и пол-
ноты ее профиля заметно уменьшается
коэффициент шарнирного момента
руля по абсолютной величине с одно-
го временным усилением нелинейности в
протекании зависимое! ей
111 ~ Г (аго, М- Так, например, с уве-
личением относительной площади осе-
вой компенсации от КК до SOK = 0.26
(при форме профиля "эллипс-100") ко-
эффициент шарнирного момента руля
при 6В = -20° и a = 0 уменьшается бо-
лее, чем в 2,5 раза, а при SOK = 0,3
почти в 10 раз.
При форме носка "окружность"
и S0K = 0.3 руль высоты становится пе-
рекомпенсированным по углу атаки в
диапазоне а = т!0° при 6В = 0
(рис. 5.25) и по уг-лу его отклонения в I
диапазоне ов = -10е + -19° (рис. 5.26, .
5.27).
112
Увеличение полноты профиля ком-
пенсации приводит к уменьшению шар-
нирного момента руля.
Если для руля с конструктивной ком-
пенсацией коэффициент шарнирного мо-
мента монотонно возрастает с его отклоне-
нием вплоть до .максимально исследованно-
го угла 5В = -30°, то для руля с осевой ком-
пенсацией коэффициент шарнирного мо-
мента с его отклонением сначала увеличива-
ется, а затем, начиная с определенного угла
его отклонения в зависимости от величины
S0K и формы профиля носка руля, начинает
уменьшаться, а при дальнейшем увеличении
Угла отклонения коэффициент шарнирного
Момента руля резко возрастает, начиная с
тех углов его отклонения, после которых на-
блюдается падение эффективности руля с
рассматриваемым вариантом осевой компен-
сации. Чем больше осевая компенсация и
Рис 5 27
Полнее носок руля, тем с меньших углов его
отклонения имеет место резкое возрастание коэффициента шарнирного момента.
Поэтому, при максимальных углах бп шарнирные моменты рулей с меньшей пол-
нотой носка обычно меньше, чем у рулей с большей полнотой носка (рис 5.28)
www. vokb-la. spb.ru
113
Рис. 5.29
вырезы открыты, SB|,ip =_0.015
закрыты вырезы 1.3,5; SBup- 0.005
закрыты все вырезы
Рис. 5.31
На рис, 5.29 в качестве примера
показано влияние угла атаки на харак-
тер изменения шарнирных моментов
но углам отклонения рулей. Как видно
из графиков, с увеличением положи-
тельных углов атаки шарнирные мо-
менты рулей на средних и больших от-
рицательных углах gn уменьшаются, а
на положительных углах отклонения -
увеличиваются.
Следует также иметь ввиду, что
при наличии большой относительной
площади осевой компенсации
( SOk =0,26:0,3 ) заметное влияние на
величины шарнирных моментов ока-
зывают вырезы под кронштейны под-
вески рулей (рис. 5.30). Здесь относи-
тельная площадь вырезов SllHp - от-
ношение площади вырезов к габарит-
ной площади рассматриваемого органа
управления.
Наличие вырезов существенно
уменьшает эффективность осевой
компенсации как за счет уменьшения
площади осевой компенсации, так и
за счет уменьшения эффективности
отсеков компенсации, прилегающих к
вырезам, вследствие выравнивания
давления между верхней и нижней
поверхностями в области вырезов.
С увеличением относительной
площади осевой компенсации умень-
шается отношение —“ , особенно за-
мегно начиная с SOK > 0,2. Причем,
чем больше относительная толщина
профиля горизонтального оперения,
Шш™
тем меньше отношение т~
miu
(рис. 5.31). Величина отношения £
Ши
и характер изменения этого отношения
в функции S0K существенно, как будет
показано ниже, зависит от относитель- -
ной хорды руля за осью вращения, на-
личия роговой компенсации, серво- *
компенсатора (сервозагружателя) и от
других геометрических параметров.
114
Роговая компенсация характеризует-
ся, в основном, относительной площадью
SpK - отношением площади роговой ком-
пенсации к габаритной площади рассмат-
риваемого органа управления. Правило оп-
ределения площади роговой компенсации
показано на рис. 5.11.
На практике обычно роговую ком-
пенсацию применяют совместно с осевой,
что позволяет в большей степени влиять на
изменение шарнирного момента органа
управления в функции угла атаки
(скольжения). Кроме того, упрощается ве-
совая балансировка opiaHa управления с
роговой компенсацией за счет размещения
груза в роговом компенсаторе.
Влияние роговой компенсации на
шарнирные моменты органа управления
показано на рис. 5.32 и 5.33. Видно, что
при наличии роговой компенсации с отно-
сительной площадью SpK =0,06 величина
производной Шщ™ уменьшилась почти в два
раза, а производная менее, чем на
20%. Таким образом, отношение произвол-
171°™
ных —р-=0,4 (без роговой компенсации)
Шщ*,
изменилось до 0,25 при наличии роговой
компенсации.
Аэродинамические сервокомпенсато-
ры на органах управления используют как
для полного снятия усилий с рычагов
управления на сбалансированных режимах
длительного полета (триммер), так и для
уменьшения усилий на рычагах управления
при отклонении органов управления
(сервокомпенсатор).
На практике, как правило, использу-
ется кинематический сервокомпенсатор,
угол отклонения которого пропорционален
Углу отклонения органа управления.
Заметим, что при отклонении органа
Управления с кинематическим сервоком-
пенсатором уменьшается только величина
производной Шш, а производная Шш прак-
тически не изменяется. Кроме того, кине-
Лго’2- Zi(K-15 ; Профиль С, Ik- 1U%
Ьи=03, SUK-ОД; Zen1 (Г
XJO-5, 41(>-Z Хпк-15°, Профиль С-11с 10ЧБ
матический сервокомпенсатор уменьшает эффективность органа управления, по-
скольку он отклоняется в сторону обратную отклонению основного руля, т.е. в
этом случае коэффициент кинематической связи Кск -
Тек
5
< 0.
www. vokb-la. spb.ru
115
‘ На рис э 34 в качестве при-
мера приведены зависимости
Ат,,,"? (8 Э. характеризующие изме-
нение к о эффи ц и ен га шарн и р н ого
момента элерона в функции угла
его отклонения при нс оз клоненном
сервокомпенсаторе тСк—0 и при
совместном отклонении сервоком-
пенсатора с элероном по закону
Кск=-1. Видно, что шарнирный
момент элерона заметно уменьша-
ется при использовании исследо-
ванного сервокомпенсатора, ки-
нематически связанною с ним
Например, при б — -20° коэффици-
ент шарнирного момента элерона
уменьшается более, чем в два раза
Расчет коэффициента шар-
нирного момента элерона, кинема-
тически связанного с сервоком-
пенсатором, был выполнен по
формуле:
Кек пТщ' 5Э (5,14)
где.
ДтШН1, 0) - исходный коэффициент шарнирного момента элерона при
неотклоненном сервокомпенсаторе,
Klk = —* - коэффициент кинематической связи Здесь тск угол отклонения
бэ
сервокомпенсатора, б, - угол отклонения элерона,
mJ" - производная, характсризхтощая эффективность сервокомпенсатора.
Для небольших малоскоростных самолетов часто возникает проблема не
ухзеньшения шарнирных моментов органов управления, а их увеличение, посколькх
у такою класса самолетов при их пилотировании возникают слишком малые уси-
лия на педалях управления. В этом случае на практике, как правило , для увеличе-
ния усилий в систему управления вводят дополнительные специальные грузы или
пружины.
’ Эту проблему возможно решать и аэродинамическим путем, г.е сервоком-
пенсатор использовать не как компенсатор шарнирных моментов, а как загружа-
гель
В этом случае коэффициент кинематической связи должен иметь положи-
тельные значения IQs > 0 (к^), т е. сервозагружатель должен отклоняться в ту же
сторону, что и основная поверхность органа управления. При этом, эффективность
органа управления будет увеличиваться, величина производной m?c будет возрас-
ту
тать и, следовательно, отношение заметно уменьшаться. Меняя коэффициент
кинематической связи К<,к, можно подобрать такие усилия на рычагах управления
которые по своим значениям будут достаточными для получения нормированных
усилий, необходимых для управления таких самолеюв
116
На рис. 5.35 в качестве примера показано влияние сер во компе ксаторс.
(КсК < 0) и сервозагружателя (Ксз > 0) на эффективность и шарнирные моменты
руля высоты нестреловидного горизонтального оперения в виде производных и
mJ;,. Видно, что при использовании с сервокомпенсатора производные to’1 и т,
уменьшаются. Отношение -т— резко возрастает, а отношение »аметно
П1ш\ т.-;
уменьшается.
При использовании сервозагружателя (к^ > 0 ) производные mJ;, и ;г.}' еоз-
тшТ П1ш.
растают, а при этом отношение —уменьшается, а 5 возрастает.
Уменьшение отношения
*
— положительно влияет на продольную устоичи-
вость самолета при освобожденном руле высоты,
а увеличение отношения —
положительно влияет на расход усилий на единицу перегрузки.
Влияние относительной хорды органа управления на производные ni’ и
показано на рис 5.36 для органа управления с конструктивной компенсацией.
Видно, что с увеличением относительной хорды органа управления за осью враще-
Ния величина производной щдш незначительно уменьшается по абсолютной вели-
чине, в то время, как производная m“u резко возрастает. Следовательно, с увеличе-
Пием относительной хорды органа управления, отношение будет возрастать
111 www.vokb-la.spb.ru
117
Blnp П1щ
-0.010
Конструктивная компенсация
---е----6
1Пщ
Рис. 5.36
..Форма носка "Эллипс-100"
АП1Ш | SoK= 7.4%(КК)
о! 1Л 9П п°
Профиль С-11с
-0. loJ
Рис. 5.37
Рис. 5.38
Как показали эксперимен-
тальные исследования, влияние от-
носительного размаха на производ-
ные Шш и Шщ незначительно.
Приведенные зависимости
величин производных m„i и пц., от
относительной хорды органа
управления качественно отражают
эти закономерности для различных
несуших поверхностей.
Влияние относительной тол-
щины профиля на коэффициенты
шарнирного момента руля высоты
показано на рис. 5.37 и 5.38 в виде
зависимостей Дт1ПВ =f(aro, бв). Эти
экспериментальные зависимости
были получены на модели изолиро-
ванного горизонтального оперения
с относительной хордой руля высо-
ты за осью вращения Ь’в = 0,2.
Видно, что с увеличением от-
носительной толщины профиля
шарнирные моменты руля при ма-
лых углах его отклонения заметно
уменьшаются при всех исследован-
ных SOK . Кроме того, зависимости
Лп1«1в=(вв) приобретают более
118
плавный характер изменения в
функции угла отклонения руля при
большой относительной площади
его компенсации.
На ряс. 5.39 показано влияние
угла схода профиля у задней кром-
ки.
Здесь представлены экспери-
ментальные зависимости, получен-
ные на профиле с углами о — 13,7°;
16,6° и 21,5°. Руль на профиле имел
конструктивную компенсацию.
Можно видеть, что с увеличением
угла схода профиля зависимости
inni=f(5) становятся существенно
нелинейными, особенно в диапазо-
не небольших углов огклонсния ру-
ля. Для руля с большим углом схода
даже при конструктивной компен-
сации может иметь место переком-
пенсация по углу атаки и углу от-
клонения.
Утолщение задней кромки,
при одновременном уменьшении
угла схода профиля, приводит к уве-
личению шарнирных моментов руля
по углу атаки и углу отклонения ру-
ля (рис. 5.40 ). При этом эффектив-
ность руля несколько возрастает.
Влияние отклонения закрыл-
ков на шарнирные моменты элерона
показано на рис. 5.41. Эти результа-
ты получены при исследовании ма-
кета самолета с трапециевидным
крылом в аэродинамической трубе
Т-101 НАГИ. Начало элеронов было
непосредственно у закрылков. Вид-
но, что отклонение закрылков при-
водит к увеличению шарнирных мо-
ментов элеронов, особенно заметно
при положительных углах атаки и
положительных углах отклонения
элерона.
Шарнирные моменты руля
высоты и руля направления одноки-
левого вертикального оперения с
отклонением закрылков изменяются
в меньшей степени, чем для элеро-
нов. Причем, величины производ-
ных и 1Пщи практически нс
изменяются с отклонением закрыл-
ков.
www.vokb-la.spb.ru
119
Влияние числа Re на шарнирные
моменты показано на рис. 5.42. Здесь
приведены зависимости mIlm — f(6n) при
аго = 0° и -10°, полученные из испытаний
модели изолированного горизонтального
оперения в аэродинамической трубе Т-
106 ЦАГИ при М ~ 0,15 при начальном
давлении Ро = 1 и 5 ата. Видно, что с
увеличением числа Re коэффициент
шарнирного момента уменьшается при
больших углах |ct|+|SB|.
Для уменьшения шарнирных мо-
ментов органов управления можно ис-
пользовать, так называемые, выносные
компенсаторы или компенсирующие за-
концовки (рис 5.43).
Рис. 5.43
120
На рис. 5.44 показано влияние-
вынос ных компенсаторов на шар-
нирные моменты элерона. Компен-
сирующие поверхности выносных
компенсаторов представляли собой
плоские металлические плашины
толщиной примерно 1,5мм. Эти ре-
зультаты получены в присутствии
четырех выносных компенсаторов:
два были установлены на верхней
поверхности и два на нижней. От-
носительная площадь четырех
компенсирующих поверхностей'
Sjai =0,048 - в долях габаритной
площади элерона. Видно, что с ус-
тановкой выносных компенсаторов
заметно уменьшаются коэффициен-
ты шарнирных моментов элерона.
Например, при 5э=-25° коэффици-
ент mt[I, уменьшается в два раза по
сравнению с коэффициентом шар-
нирного момента элерона, получен-
ным без выносных компенсаторов.
Заметим, что в присутствии
выносных компенсаторов несколько
уменьшается аэродинамическое ка-
чество модели, а эффективность
элеронов практически нс изменяет-
ся.
Влияние компенсирующей
законцовки на шарнирные моменты
элерона показано на рис. 5.45 и
5.46. Компенсирующая законцовка,
показанная в качестве примера на
рис. 5.43, выполнена также в виде
плоской пластины. Компенсирую-
щая законцовка крепилась к специ-
альному кронштейну, который был
жестко связан с элероном, и при
отклонении элерона она отклоня-
лась совместно с ним. Относитель-
ная площадь компенсирующей за-
концовки равна SK3 =0,024 - в долях
табаригной площади элерона. Из
рассмотрения зависимостей
^nitii3=f(ct,5Э), приведенных на рис.
'’•45 и 5.46, видно, что компенси-
рующие законцовки весьма сущест-
^Нное влияние оказывают на шар-
Иирные моменты элерона при из-
Менении угла атаки.
SOK = 0.3 Парабола - 100"
121
1 ак, например, элерон с исследован-
ной компенсирующей законцовкой
становится даже перекомпенсирусмым
по углу атаки, в то время как при от- ;
клонен ии элерона на угол -20° коэф-
фициент шарнирного момента элерона 1
уменьшается примерно на 20%. Эф- ,
фективносгь элеронов в присутствии I
компенсирующих законцовок заметно '
увеличивается.
Шарнирные моменты двухзвен-
ного органа управления (руля высоты, |
руля направления или элерона) пред- j
ставим раздельно для первого звена I
muil и второго Шш2
На рис. 5.47, в качестве примера,
приведены коэффициенты шарнир-
ного момента первого звена руля на-
правления Лт... . в функции угла его
отклонения при неотклоненном втором звене и в функции угла отклонения второго
звена при неотклоненном первом, а также при совместном отклонении обоих
звеньев в одну сторону на одинаковые углы.
На рис. 5.48 приведены коэффициенты шарнирного момента второго звена
руля направления ДтШн, в функции его угла отклонения при неотклоненном пер-
вом звене и в функции угла отклонения первого звена при неотклоненном втором
звене, а также при совместном отклонении обоих звеньев в одну сторону на одина-
ковые углы.
Эти результаты были получены при экспериментальных исследованиях моде-,
ли изолированного хвостового оперения в аэродинамической трубе
Т-101 ЦАГИ (рис. 5.21).
Приведенные результаты экспериментальных исследований показывают, что
коэффициенты шарнирного момента первого звена руля направления заметно уве-
личиваются при отклонении второго звена и при их совместном отклонении в одну
сторону, по сравнению с коэффициентом шарнирного момента первого звена, по-
лученным в функции угла его отклонения. Шарнирные моменты первого звена моь
гут быть уменьшены при использова--
нии осевой компенсации.
Коэффициенты шарнирного мо-;
мента второго звена с отклонение#'
первого звена увеличиваются в мень?:
шей степени, чем коэффициент
полученный только в функции его от-*
клонения при 6Н,— 0- При совместной
отклонении второго звена с первый
коэффициенты шарнирных момент#
второго звена также заметно увеличи-
ваются.
Коэффициент шарнирного мо-
мента первого звена в функции У13?
отклонения можно определить по Ф°Р
муле; *
122
oiшИ1 ( 6 щ 5 «3) in,ц*( 5Н1 +л ni п"*, 51I? (5.15)
где;
П1ши1(5„,+SII2) - коэффициент шарнирного момента первого звена руля на-
правления при одновременном ею онслонении со вторым звеном в одну сторону.
Шп^| " производная коэффициента шарнирного момента первого звена руля
направления по углу его отклонения при неотклоненном втором звене бнз =0;
ДШш^ - производная, характеризующая приращение коэффициента шарнир-
ного момента на первом звене при отклонении второго звена.
Коэффициент шарнирного момента второго звена можно также определить
по формуле:
П1 Шн? (5 + 8112) = ni61{2 +Д m5 (5 16)
где:
тШн2 (8Н1 + б112)- коэффициент шарнирного момента второю звена руля на-
правления при совместном его отклонении с первым звеном в одну сторону;
” производная коэффициента шарнирного момента второго звена руля
направления по углу его отклонения при неотклоненном первом звене оП1 = 0;
Ат'^ - производная, характеризующая приращение коэффициента шарнир-
ного момента на втором звене при отклонении первого звена,
5Н> и ВН2- углы отклонения первого и второго звеньев руля направления
(рис. 5.22).
5.3 Приближённый метод расчёта шарнирных моментов органов
управления при малых дозвуковых скоростях
На начальной стадии проектирования летательных аппараюв, до изготовле-
ния специально подготовленных моделей и экспериментальных испытаний их в
аэродинамических трубах, возникает необходимость расчетных оценок шарнирных
моментов органов управления для определения усилий на рычагах управления
В связи с этим в ЦАГИ разработан инженерный метод расчета шарнирных
моментов органов управления на задней кромке несущих поверхностей, геометри-
ческие параметры которых изменяются в широких пределах.
5.3Л Шарнирные моменты органов управления, расположенных вдоль
задней кромки прямоугольных несущих поверхностей
Органы управления с конструктивной компенсацией
Анализ результатов многочисленных экспериментальных исследований на
Моделях в аэродинамических трубах показал, что характеристики шарнирных мо-
ментов органов управления, неимеюших аэродинамической компенсации и распо-
ложенных вдоль всей задней кромки прямоугольного крыла или оперения, зависят
°т Целого ряда геометрических параметров, в том числе: от удлинения несущей по-
«РХности, относительной хорды органа управления за осью его вращения, от угла
0Да Профиля в диффузорной его части, величина которого определяется относи-
Нои Толщиной профиля, местом расположения ее максимального значения по
₽Де и кривизной контура вблизи задней кромки www.vokb-la.spb.ru
123
На рис 5.49 приведены лсорегиче-
ские значения производной коэффициен-
та шарнирным моментов по углу отклоне-
ния органа управления с конструк-
тивной компенсацией для прямоугоявного
крыла с нулевой толщиной в зависимости
от его удлинения при заданной относи-
тельной хорде рулевой поверхности
(Ь' = О,25), подсчитанные по методу дис-
кретных вихрей Приведенная зависи-
мость, позволяя качественно оценить
влияние удлинения несущей поверхности
на шарнирные моменты,
производной tn*„
Рис. 5.49
существенно превышает экспериментальные значения
. Для улучшения сходимости расчетных и экспериментальных
данных на основании анализа и обработки результатов экспериментальных иссле-
дований были получены соответствующие поправочные коэффициенты.
Для оценки влияния относительной толщины профиля (угла схода в диффу-
зорной его части) несущей поверхности получена следующая приближенная фор-
мула:
iz Г1 0,000045(6 + Х)сг
Ко = [1 +------s----— | О 17)
Ишт
Здесь:
тйш,- теоретическое значение производной коэффициента шарнирного мо-
мента органа управления по углу его отклонения, определяется по зависимости на
рис. 5.49;
Л- удлинение прямоугольного крыла или оперения,
о- утол схода профиля несущей поверхности в диффузорной части (в град),
определяется, как правило, по координатам профилей установленных на участках
размаха несущих поверхностей, обслуживаемых органами управления.
Формула 5.17 справедлива для а <15°.
Приближенные значения угла о в тависимости от относительной толщины
профиля, контур диффузорной части которого образован прямыми линиями или
имеет слабо выраженную кривизну, определяются соотношением:
о = 90 6 |1+2,34 ( хс -0,25)| (5.18)
где:
с - относительная толщина профиля;
хс - координата расположения максимальной толщины профиля по его хор-
де.
Значительное влияние на характеристики шарнирных моментов оказывает
угол схода задней кромки профилен, имеющих криволинейный контур в хвостовой
его части - выпуклый или вогнугый (рис. 5.50). Особенно сильное влияние на
шарнирные моменты руля оказывает утол схода в непосредственной близости зад-
ней кромки и на участке последней четверти хорды руля.
Приращение шарнирных моментов оршнов управления, обусловленных кри-
визной профиля вблизи задней кромки, определяется выражением:
Ami,, = 0,00064 | 61 * °- - о I
(5.19)
124
Внешний конлур рулевых поверхностей
г) Задняя кромка рулевой поверхности
с выпуклым контуром
0-25 Ь'
в|
Рис. 5.50
Здесь:
Oj - общий угол схода профиля у зад-
ней кромки;
02 - угол между касательными к конту-
ру профиля opiana управления в точке, рас-
положенной на расстоянии х ® 0,75 Ь' за
осью вращения (рис. 5.50)
Анализ результатов и обработка теоре-
тических и экспериментальных исследований
позволили получить поправочный коэффи-
циент, уточняющий влияние относительной
хорды руля или элерона на производную
m шт'
Kv -- П - 0,47 ( Ь’- 0,25 )} (5 20).
Этот коэффициент применим для ор-
ганов управления с относительной хордой
Ъ'> 0,1.
В результате, коэффициент шарнирно-
го момента органа управления с конструк
тивной компенсацией для прямо) отьнах
крыльев (оперений) определяется следующи-
ми выражениями.
- для органов управления с плоским
контуром
niL Кс Ко (5 21 к
- для органов управления с криволи-
нейным контуром (выпуклым или вогнутым)
mt„ = m?Ur Кп Кь’+Дш*, (5 22)
Органы управления с осевой аэродинамической компенсацией
При расчете шарнирных моментов органов управления, снабженных осевой
аэродинамической компенсацией, по сравнению с рулевыми поверхностями,
имеющих конструктивную компенсацию, необходимо учесть влияние дополнитель-
ных геометрических параметров, в том числе относительной площади осевой ком-
пенсации, формы ее профиля и наличия вырезов в этой компенсации
Для учета влияния относительной площади и формы профиля осевой ком-
пенсации на коэффициент шарнирного момента органа управления получена сле-
дующая приближенная формула:
. о Л
sin -
1------
1 + sin -
________4
= [1-(2,6+ДФа)(5ок-—П-^)]
1 + sin 2
www. vokb-la. spb.ru
125
где:
Sok " относительная площадь осевой компенсации;
а - угол схода профиля в его диффузорной части;
ДФ - коэффициент, учитывающий влияние формы профиля осевой компен-
сации.
Указанный коэффициент имеет следующие значения:
- для формы профиля осевой компенсации, выполненной в виде "эллипса"
ДФ—0,08,
- для формы профиля "парабола" ДФ=0,105,
- для формы профиля "окружность’’ ДФ=0,165.
Способ построения типовых форм профиля ("эллипс", "парабола",
"окружность") приведен в разделе 5.2.
Одной из особенностей органов управления с осевой компенсацией является
наличие в этой компенсации вырезов под кронштейны, предназначенные для кре-
пления рулевых поверхностей к неподвижной части крыла или оперения. Указан-
ные вырезы вызывают снижение эффективности осевой компенсации как за счет
уменьшения ее площади, так и за счет перетекания потока между нижней и верх-
ней поверхностями осевой компенсации в области вырезов.
Для оценки влияния вырезов на шарнирные моменты органа управления по-
лучено выражение для поправочною коэффициента:
к (So.-0,1)
KW-H---------------------
,ЛШв/выр
(5-24);
здесь:
Seup- относительная площадь вырезов (площадь вырезов отнесена к габарит-
ной площади органа управления);
S0K- площадь осевой компенсации;
тшб/аыр" производная коэффициента шарнирного момента для органа управ-
ления с осевой компенсацией без вырезов.
Это выражение учитывает влияние вырезов на производную Щщ в присутст-
вии кронштейнов, которые частично препятствуют выравниванию давления между
верхней и нижней поверхностями осевой компенсации в зонах непосредственно
прилегающих к вырезам.
При отсутствии кронштейнов потеря эффективности осевой компенсации за
счет свободного перетекания в области вырезов существенно возрастает. В этом
случае коэффициент определяется соотношением:
ш 6 аир
В результате выражение для определения коэффициента шарнирного момен-
та органа управления с осевой аэродинамической компенсацией по углу его откло-
Ks„.p
(5.25).
нения при малых углах атаки можно записать в виде;
тшм ~ Ко Kt' • KSox • +Дп1Шп
Приведенные в этом соотношении поправочные коэффициенты определяют-
ся, соответственно по формулам (5.17), (5.19), (5.20), (5.23), (5.24). (5.25). Следует
отметить, что при подсчете производной шарнирные моменты отнесены к
площади и хорде органов управления за осью их вращения.
126
Роговая аэродинамическая компенсация
Роговая компенсация в концевых сечениях рулей или элеронов размещается,
как правило, либо непосредсгвенио за неподвижной частью оперения или крыла и,
таким образом, находится в следе за несущей поверхностью (затененная или
“закрытая" роговая компенсация), либо носок этой компенсации является продол-
жением передней кромки оперения (крыла) и обтекается невозмущенным набе-
гающим потоком (’‘открытая" роговая компенсация).
Для определения шарнирных моментов, создаваемых обоими типами роговой
компенсации, получены нолуэмпирические формулы, результаты расчета по кото-
рым приведены на рис. 5.51 и 5.52 в виде параметрических сеток, позволяющих
оценить значения производной Щщ в широком диапазоне изменения величин 7рк
и SpK, измеренных в долях размаха и площади органа управления.
На рис 5.53 и 5.54 построены расчетные зависимости, позволяющие оценить
шарнирные моменты, создаваемые роговой компенсацией при изменении угла ата-
ки.
Комбинированная аэродинамическая компенсация
На практике для уменьшения
шарнирных моментов органов
управления нередко применяется
комбинированная аэродинамическая
компенсация, состоящая из осевой
компенсации (занимающей большую
часть размаха рулевой поверхности)
и роговой компенсации в концевых
сечениях этого органа управления с
малым относительным размахом.
Для определения производной
коэффициента шарнирного момента
рулей или элеронов, имеющих ком-
бинированную аэродинамическую
компенсацию, получено соотноше-
ние;
~ к§ок+sok ‘ (1-
где;
тши ~ производная коэффи-
циента щ,,, для руля с конструктив-
ной компенсацией, определятеся вы-
ражениями (5.21), (5.22),
- поправочный коэффи-
циент для руля с осевой компенса-
цией, определяется по формуле
(5-23);
S*K ~ относительная площадь
осевой компенсации, занятая рого-
вой компенсацией;
Рис. 5.51
Рис. 5.52
*3nKj»Lmif роговая компенсация
127
П1‘шг, - производная коэффи-
циента in,,, , создаваемого роговой
компенсацией, определяется по гра-
фикам на рис. 5.51 и 5.52.
Рис. 5.54
5.3.2 Шарнирные моменты органов управления, расположенных на задней
кромке трапециевидных несущих поверхностей
В отличие от органов управления, расположенных вдоль всего размаха прямо-
угольных крыльев (оперений), при расчете шарнирных моментов органов управле-
ния, занимающих часть размаха трапециевидных несущих поверхностей, необходи-
мо учесть влияние ряда дополнительных параметров:
Рис. 5.56
-относительного размаха рулей или элеронов,
- места расположения их на задней кромке
крыла или оперения,
- угла стреловидности и сужения несущей по-
верхности.
Влияние относительного размаха и мес-
та расположения органа управления на крыле
(оперении) оценивается с помощью попра-
вочных коэффициентов , значения кото-
рых в виде соответствующих зависимостей,
полученных на основании результатов пара-
метрических расчетов шарнирных моментов
органов управления на прямоугольных несу-
щих поверхностях по методу дискретных вих-
рей и обработки экспериментальных данных,
представлены на рис. 5.55 - 5.57.
Приведенный на этих зависимостях по-
правочный коэффициент К;,, (рис. 5.55) по-
зволяет учесть влияние относительного разма-
ха органа управления, расположенного в кор-
невой части крыла, когда его хорда с коорди-
натой (zi) совпадает с корневой (бортовой)
хордой крыла.
Коэффициент К;,, (рис. 5.56) учитыва-
ет влияние относительного размаха концевою
органа управления с координатой z?, совпа-
дающей с концевой хордой крыла. Коэффи-
циент z3 (рис. 5.57) позволяет оценить влия-
ние на производную in®, места расположения
органа управления вдоль размаха крыла
(оперения) при заданном значении его oiho-
128
сительного размаха - z2 - z,)-
Как известно, основное влияние на
шарнирные моменты органов управления,
установленных на стреловидных несущих по-
верхностях. оказывает угол стреловидности
Ло оси их вращения. Эго влияние на значе-
ния шарнирных моментов учитывается с по-
мощью коэффициента КХов= cos3yO!1, что хо-
рошо подтверждае гея результатами много-
числен ных экспериментальных исследова-
НИЙ.
Влияние сужения крыла (оперения) на
шарнирные моменты органов управления,
имеющих носюянную (или близкую к посто-
янной) относи।ельную хорду вдоль размаха,
сравнительно невелико. Поэтому специаль-
Рис. 5.57
ная поправка на влияние сужения в данном методе не предусмотрена.
Таким образом, расчет шарнирных моментов органов управления на трапе-
циевидных несущих поверхностях выполняется с помощью следующих выражений:
- для органов управления с конструктивной компенсацией
ш5ш =( т*Шт К„ Кь + Д< ) Kz К<ив;
- для органов управления с осевой компенсацией
in*, = (т6Шт • Ко Kjy К5<ж Ks_ + А л4) К, K,w.
Приведенные в этих соотношениях значения поправочных коэФф и имен >ов
определяются, как указывалось выше, по соответствующим зависимостям я форму-
лам.
Необходимо отметить, что изложенный метод расчета позволяв-’ оценить
шарнирные моменты органов управления в диапазоне, ограниченном линейным
изменением коэффициента тш по углу отклонения, величина которого существен-
но сокращается с увеличением, например, относительной толщины прсфиля несу-
щей поверхности, а также размера, формы и полноты осевой аэродинамической
компенсации.
www.vokb-la.spb.ru
129
VI. УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ
ЛЕГКИХ САМОЛЕТОВ ОБЩЕГО НАЗНАЧЕНИЯ
Введение
Требования к летной годности' самолетов АОН изложены в отечественных
авиационных правилах АП-23 и зарубежных авиационных правилах FAR-23.
Рассматриваемые легкие самолеты имеют ряд особенностей, основные из
которых следующие:
— малая удельная нагрузка на крыло ( обычно G/S = 60 ч- 120 кг/м? ),
- использование, как правило, прямых крыльев большого удлинения (до
V41),
— отсутствие автоматизации систем ручного (штурвального) управления,
— применение винтомоторных групп как с тянущими, так и толкающими
винтами,
— многоцелевое применение самолета.
С учетом тою, что такие самолеты предназначаются, в основном, для
эксплуатации любителями, необходимо предъявлять повышенные требования к
характеристикам, обеспечивающим безопасность полета. Например, существующие
требования ограничивают скорость сваливания одномоторных самолетов в
посадочной конфигурации величиной не более 113 км/час, что связано с
обеспечением безопасности посадки и основано на опыте эксплуатации лёгких
самолетов.
Нормировано также минимальное усилие на рычаге продольного управления
при выходе на максимальную эксплуатационную перегрузку. Усилие не может быть
очень малым, чтобы избежать непреднамеренного вывода самолета на большие
перегрузки.
Достаточно жесткие требования предъявляются к характеристикам штопора.
Рекомендуется, чтобы самолет нормальной категории вообще не входил в штопор.
Если самолет входит в штопор, то необходимо, чтобы обеспечивался быстрый
вывод из штопора стандартными методами управления.
Особенностью анализа характеристик устойчивости и управляемости
самолетов в настоящее время можно считать широкое применение вычислительных
машин и пилотажных стендов. Вычислительные машины позволяют проводить
анализ характеристик устойчивости и управляемости самолетов без обычных, ранее
принимавшихся упрощений, по уравнениям полного пространственного движения
с учетом (при необходимости) упругой деформации конструкции.
Широкое применение получили экспериментальные методы отработки
характеристик устойчивости и управляемости самолетов на пилотажных стендах. В
ЦАГИ имеется целый ряд пилотажных стендов, оперативно настраиваемых под
характеристики конкретных самолетов. На этих стендах могут быть апробированы
пилотажные характеристики самолета и оценена их приемлемость, особенно , в
случаях оригинальных компоновок самолетов. На пилотажном стенде может быть
осуществлён также тренаж летчиков при подготовке первых полетов самолета, что
значительно повышает их безопасность.
Данные РДК строились на базе существующих требований АП-23 и FAR-23.
Пока еше отсутствует опыт эксплуатации лёгких отечественных самолетов,
имеющих сертификат летной годности, поэтому составители считают, что данные
РДК в дальнейшем будут уточняться и дополняться.
130
6.1 Системы координат и условные обозначения
6.1.1 Системы координат
Связанна?! система координат OXYZ (рис. 6.1) - правая прямоугольная
система координат, начало которой 0 совладает с центром масс самолета; оси ОХ,
OY, OZ неподвижны относительно самолёта и определяются следующим образом:
Продольная ось ОХ направлена вперед по строительной горизонтали
фюзеляжа,
Нормальная ось 0Y лежит в плоскости симмефии и направлена к верхней
части фюзеляжа,
Поперечная ось 0Z направлена в сторону правою крыла перпендикулярно
плоскости симметрии самолёта.
Полусвязанная система координат OXeYeZe (рис. 6.1) -правая прямоуюльная
система координат, начало которой 0 совпадает с ценiром масс самолета, а осп
ОХе, OYe и OZe определяются следующим образом:
Ось ОХе совпадает с проекцией воздушной скорости самолета на плоское]ь
симметрии и направлена вперед,
Ось OYe лежит в плоскости симметрии, направлена к верхней части
фюзеляжа.
Ось OZe направлена в сторону правого крыла перпендикулярно плоскости
симметрии самолета (ось OZe совпадает с поперечной осью OZ связанной системы
координат).
Скоростная система координат OXaYaZa (рис. 6.1) — правая прямоугольная
система координат, начало которой 0 совпадает с центром масс самолёта, а оси
ОХа, OYa и OZa определяются следующим образом:
Ось ОХа направлена вперёд по вектору воздушной скорости.
Ось OYa лежит в плоскости симметрии самолёта и направлена к верхней
части фюзеляжа (ось OYa совпадает с осью OYe полусвязанной системы
координат).
Ось OZa направлена в сторону правого крыла перпендикулярно плоскости
OXaYa.
Рис 6.1
www.y<^)-la.spb.ru
6.1.2 Условные обозначения
S — площадь крыла,
f — размах крыла,
ЬА "" средняя аэродинамическая хорда крыла,
X “ угол стреловидности крыла (хо - по передней кромке, хо.25 ~ по линии
четверти хорд),
Фкр ~ угол установки (угол заклинения) крыла (угол между строительной
горизонталью фюзеляжа и корневой хордой крыла),
V — угол поперечного “V" крыла (угол между поперечной осью самолёта и
проекцией линии четверти хорд крыла на плоскость OYZ связанной системы
координат),
Фет — угол установки (угол заклинения) стабилизатора,
Slo - площадь горизонтального оперения,
SIO ~ SIO/S — относительная площадь горизонтального оперения,
SBO — площадь вертикального оперения,
SBO = Sbo/S — относительная площадь вертикального оперения,
Lro — плечо горизонтального оперения (расстояние от условного центра масс
самолета Хт=0,25 до точки, расположенной на 25% САХ гори зон i алы ни о
оперения),
I Lro
Цо = — относительное плечо горизонтального оперения,
Ъа
LB0 - плечо вертикального оперения (проекция отрезка между условным
центром масс самолёта Хт =0,25 и точкой на 25% САХ вертикального оперения на
продольную ось самолёта),
Luo= — относительное плечо вертикального оперения,
Аго= Sro LT0— коэффициент статического момента площади горизонтального
оперения.
Вво~ SW) !.,„> — коэффициент статического момента площади вертикального
оперения,
с с S"
5>в, $в = “ площадь и относительная площадь руля высоты,
Ьго
- S„
S«. sH=?1
е>ио
s s =s’
°3 s
— площадь и относительная площадь руля направления,
— площадь и относительная площадь элеронов,
С — вес (масса) самолета,
Jx - момент инерции самолета относительно продольной оси ОХ 1 ,
Jy — момент инерции самолета относительно нормальной оси OY,
Jz — момент инерции самолета относительно поперечной оси OZ,
Jxy - центробежный момент инерции,
ц, ’у, *ху. — безразмерные моменты инерции,
’ Здесь и it последующем тексте индексы X, Y и Z приписываются величинам, определяемым в
связанной системе координат (см. раздел 6.1.1)
132
w
g-J
G-
g-J,
Ст b2
£ ‘ Jxy
G
Р - тяга двигательной установки,
Ф,ш - угол установки двигателя - угол между осью двшателя и продольной
осью самолета (или бортовой хордой крыла в месте установки двигателя),
у
Хлв’Удв - Т““ ~ плечо и относительное плечо тяги двигателя в вертикальной
Ьд
плоскости — расстояние от центра масс до проекции линии действия тя;и на
плоскость симметрии самолета ,
Z;tH
Z-ди, Z.i
плечо и относительное плечо тяги двигателя в
плоскости - расстояние от центра масс до проекции линии
на горизонтальную плоскость, проходящую чсрет центр масс
горизонтальной
действия тяги
самолета .
Н — высота полета,
р0, р„ — плотность воздуха на уровне моря и на рассматриваемой высоте
полета.
V — истинная воздушная скорость самолета — скорость перемещения центра
масс самолета относительно воздуха,
Р.Л2
q - - — скоростной напор,
Су4 = — коэффициент подъемной силы,
-X
сх - ' — коэффициент силы лобового сопротивления,
cz = - коэффициент поперечной силы,
Я
МХ
шх = “g - — коэффициент момента крена,
Му
niy - - $ — коэффициент момента рыскания,
т2 = - ----коэффициент продольного момента (момента тангажа),
q b Ьа
М|ЦВ ,
тшв = д—~ коэффициент шарнирного момента руля высоты,
q S„ Ьв
шШн = —~шн - — коэффициент шарнирного момента руля направления,
q-SH•Ьн
М
п1|ич = — „ -- - коэффициент шарнирного момента элеронов,
q • bj
а — угол атаки,
Р — угол скольжения,
а1о — угол атаки горизонтального оперения,
е — угол скоса потока у горизонтального оперения,
www.vokb-la.spb.ru
133
£о “ Угол скоса потока при нулевой подъемной-силе,
ст —угол бокового скоса потока у вертикального оперения,
О — угол наклона траектории,
о — угол тангажа,
у — угол крена,
Ч/ - угол рыскания,
юх — угловая скорость крена,
coj — угловая скорость рыскания,
(oz ~ угловая скорость тангажа,
сох,(оу,©z, — безразмерные угловые скорости,
_ ©Г { _ <оу € wz-ba
“х~ 2-V ’ “y ~ 2-V ’ “z“ V ’
Хр — безразмерная координата фокуса самолета по углу атаки при
фиксированном руле высоты,
Хрс — безразмерная координата фокуса самолета по углу атаки при -
свободном руле высоты,
Хрью~ безразмерная координата фокуса по углу атаки самолета без
горизонтального оперения,
Хт — центровка самолета,
ХТ1П[ — предельно передняя центровка,
Хтпэ “ предельно задняя центровка,
пь' _- X, - Хр — запас продольной статической устойчивости при ;
фиксированном руле высоты,
т£ = Хт- Хрс — запас продольной статической устойчивости при свободном
руле высоты,
- - пг;г
Хтн = Хг “ — — нейтральная центровка при фиксированном руле высоты,
ХП|С “ Хрс ~ ~ ~ нейтральная центровка при свободном руле высоты,
стп = Хт - Хтн ~ степень статической устойчивости по перегрузке при
фиксированном руле высоты,
опс ’ Хт _ Х-гнс ~ степень статической устойчивости по перегрузке при
свободном руле высоты,
5 в — угол отклонения руля высоты (по перпендикуляру к оси вращения),
5Н “ угол отклонения руля направления,
6э ' угол отклонения элеронов, ' $
хв ’ угол отклонения триммера руля высоты, „
тн - угол отклонения триммера руля направления, |
тэ “ угол отклонения триммера элеронов,
Хв ~ перемещение рычага продольного управления (ручки, штурвала), 4
Хэ — перемещение рычага поперечного управления (ручки, штурвала ), *
Хн ~ перемещение педалей руля направления,
d5B
КШв - ’ - коэффициент передачи от штурвала (ручки) к рулю высоты, “
Kinjl = - коэффициент передачи от педалей к рулю направления,
аЛн
134
K1U , = — коэффициент передачи от штурвала (ручки) к элеронам,
ОЛЭ
рв — усилие на рычаге продольного управления,
рэ — усилие на рычаге поперечного управления,
Рн — усилие на педалях,
2G/S
ц- , - -• относительная плотность самолета (для
PfibA
характеристик),
2G/S
т,п - - ---масштаб времени,
продольных
2G/S
-относительная плотность самолёта (для боковых характеристик),
(р2 + 2^р + ©о) - 0 - характеристическое уравнение продольного коротко-
периодического движения самолёта,
4,© о “ Декремент затухания и собственная недемпфированная частота
продольного короткопериодического движения самолёта.
6.2 Продольная устойчивость и управляемость
6.2.1 Скорость сваливания самолёта
Под скоростью сваливания, точнее, скоростью начала сваливания самолёта
(Vc) понимают минимально возможную скорость полёта, которая определяется
одним из следующих признаков:
— максимальными несущими свойствами самолёта (Cv),
— потерей продольной или боковой устойчивости,
- ограничением продольного управляющего момента на кабрирование
(предельное отклонение рычага управления самолёта "на себя").
Рационально создать такую компоновку самолёт, чтобы его несущие
свойства использовались наиболее полно, то есть, чтобы скорость сваливания
определялась величиной cv
v max
Высокие несущие свойства самолёта могут быть получены при
Использовании в компоновке крыла высоконесуших профилей, эффективной
Механизации крыла (двухщелевые закрылки), а также при установке на крыле
Предкрылков, в том числе, самостоятельно отклоняющихся на больших углах атаки. '
Скорость сваливания является своего рода "начальной точкой ", от которой
отсчитываются другие характерные скорости, определяющие лётно-технические
характеристики самолёта.
Такие скорости полёта, как скорость взлёта, скорость принятия решения (для
Многодвигатсчьньх самолётов), скорость захода на посадку и др., назначаются по
требованиям с определенным запасом до скорости сваливания, определяемой для
каждой конфигурации самолёта.
Уменьшение скорости сваливания приводит к улучшению лётно-технических
и валётно-посадочньх характеристик самолёта (сокращаются потребные длины
ВПП).
Однако, гораздо важнее то, что при уменьшении скорости сваливания
существенно увеличивается безопасность полёта. По соображениям безопасн«шиуокЬ-1а.врЬ.ги
Полёта в АП-23 и FAR-23 указано, что для одномоторных самолётов при
135
г максимальном взлетом весе в посадочной конфигурации скорость сваливания не
должна превышать 113 км/ч (70 миль/час или 61 узел).
Требование о выдерживании Vc<113 км/ч определяет еще на стадии
"завязки" самолёта минимально-необходимую эффективность механизации крыла
(Cjnu,), а имсн,1°, ПРИ заявленной разработчиком удельной нагрузке на крыло G/S
необходимым условием выполнения требованияVc<113 км/ч является неравенство
c>vJ63hJ > y^lKr/м-Т
Гаким образом, при создании самолёта общего назначения одной из главных
задач является обеспечение высоких несущих свойств компоновки.
6.2.2 Продольная статическая устойчивость и нейтральная центровка самолёта
По определению, аэродинамический фокус самолёта по углу атаки — это
точка, расположенная на продольной оси ОХ самолёта, относительно которой
момент тангажа остается постоянным при малых изменениях угла атаки |3].
Положение аэродинамического фокуса принято определять относительно носка
САХ в долях ее хорды.
На начальной стадии создания самолёта, при отсутствии результатов
экспериментальных исследований моделей самолёта в аэродинамических трубах,
аэродинамический фокус самолёта рассчитывается, исходя из фокуса крыла, к
которому добавляется в виде поправок смещение фокуса от фюзеляжа ДХ{ф-
горизонтального оперения ДХГго, мотогондол ДХРиг, работающих двигателей АХ(в,
упругости конструкции 4хГя1,, освобождения руля высоты ДХР. и от
интерференции между различными элементами компоновки ДХРиит.
Таким образом:
=xf+Д xF. -rax,» +A xF„ +Л xF, +axf„ +axFi +^xf„
Методика вычисления фокуса крыла xF и поправок к нему изложена в работе 14}
и в разделах 6.4.2 и 6.4.3. Важнейшим параметром продольной устойчивости и
управляемости, связанным с положением аэродинамического фокуса, является
запас продольной статической устойчивости самолёта и]£’, определяемый как
частная производная коэффициента продольного момента самолёта niz по
коэффициенту подъемной силы су = <^llz .
Запас продольной статической устойчивости (ш£у ) вычисляется как разница
между положением аэродинамического фокуса по углу атаки (Хг) и положением
центра масс (хт ) в долях САХ, т.е. щ^ = Хт -Хь.
Величина ш/ является главным критерием, от которого зависят практически
все характеристики продольной устойчивости и управляемости самолёта. Наличие
достаточной продольной статической устойчивости самолёта в эксплуатационном
диапазоне углов атаки является первым необходимым условием получения
требуемых (хороших) характеристик как продольной устойчивости, так и
продольной управляемости.
Для самолётов с ручной (безбустерной) системой продольного управления
величина этой частной производной зависит от того, свободен или фиксирован
136
руль высоты (точнее, рычаг рродолыюго управления). Соответственно этому
различают запас продольной статической устойчивости при фиксированном руле
высоты и/* и запас продольной статической устойчивости при свободном руле
высоты т^-
Величина iHz! определяет характер зависимости балансировочного
отклонения руля высоты от скорости полёта, а величина — характер
зависимости балансировочного усилия на рычаге продольного управления оз
скорости (см. раздел 6.2.5).
В непосредственной зависимости от критерия т£ находится еще один
Критерий продольной устойчивости самолёта — степень продольной статической
устойчивое! и по перегрузке С)1.
Величина определяется по формуле
где т"' — частная производная коэффициента продольного момента по
безразмерной угловой скорости тангажа при фиксированном руле высоты.
Величина — определяет нейтральную центровку самолёта по перетру яке
Хта
у =у - „ =у -|^-
Лтн Хт On Ль -
По определению Х1Н“ эТО такое положение центра масс самолёта,
относительно которого момент тангажа не зависит от малых изменений подъёмной
силы, когда движение летательного аппарата можно считать квази у стан овившимся
криволинейным движением в вертикальной плоскости с постоянней с<сросгью.
Это криволинейное движение может происходить с различными нормальными
перегрузками, соответствующими различным, но фиксированным положениям руля
высоты.
Различают степень продольной статической устойчивости по перегрузке с
фиксированным рулем высоты сп и со свободным рулем высоты о,к 1см.
раздел 6.4.3).
Величина Оп определяет расход руля высоты и расход рычага управления на
единицу перегрузки, а величина оп - расход усилий на рычаге управления на
единицу нормальной перщрузки (см. раздел 6.2.5).
Практика самолётостроения показала, что минимальную величину запаса
продольной статической устойчивости надо ограничивать. Это ограничение
связано, прежде всего, с безопасностью полёта и отрд-.^сг нсссходщ. cib иметь
продольный восстанавливающий момент при возмущении по уьту а гак и.
Исходя из опыта проектирования самолётов и исследований на пилотажных
стендах, а также из практики эксплуатации лёгких самолётов, рекомендуется, чтобы
в эксплуатационной области углов атаки на режимах балансировки минимальный
запас продольной статической устойчивости был не меньше, чем in^.r =-0,03+ -0,05
(с учётом освобождения руля высоты).
Значение щ'+^'-О.ОЗ относится к самолётам, у которых коэффициент
продольного демпфирования (nij7) дает ощутимый вклад в степень продольной
www. vokb-la. spb.ru
137
стал и ческой устойчивости самолета по перегрузке (-т- > ~ 0,08), где ц = —
И рё Ьд
относительная плотность самолета (для продольных характеристик)
Необходимо иметь в виду, что для некоторых компоновок зависимости
mz(a) имеют нелинейный характер, кроме того, производная Ш/у может несколько
игменягься при отклонении механизапии крыла и руля высоты Запас продольной
статической усюичивости может уменьшаться за счет обдува крыла и ГО струями
от винтов, а также при освобождении руля высоты В связи с этим в
эксплуатационной области режимов полна необходимо наити расчетный случай,
когда тапас продольной статической устойчивости будет минимальным После
этого и назначается предельно-задняя эксплуатационная центровка самолета
Переход от больших запасов продольной стагическои устойчивости к малым
может дать некоторый выигрыш в аэродинамическом качестве за счет снижения
потерь на балансировку самолета
Однако, исполыование малых запасов приводи! к особепносгям в
продольном управлении самолетом, из за я мнительного изменения таких
характеристик управляемости как Хв* и PJ1 при изменении центровок самолет
Например, при вогможном эксплуатационном диапазоне центровок легких
самолетов ДХ1Э == 0,20 и при минимальной допустимой величине Ом —
т“;
(т^г=-0,03 ^-“=-0,08) будет происходить довольно большое изменение запаса
устойчивости по перегрузке егПспих оПстш=3
Отношение Р"» Р"» , обычно бывает еще больше за счет дополнительного
игменения массы самолета, и это иногда вызывает замечания со стороны летчика
В этом случае приходится увеличивать минимальные запасы продольной
статической устойчивости (смещение вперед предельно-задних центровок)
На рис 62 в качестве примера приведена диаграмма Ain(Xr \) для
легкого самолета, на которой показано типичное расположение таких характерных
точек как аэродинамический фокус крыла К. , аэродинамическим фокус самолета
без влияния винтов с фиксированным рулем высоты Xj=, аэродинамическим фокус
самолета с влиянием винтов со свободным рулем высоты, предельно-ладняя
эксплуатационная центровка хТга и нейтральная центровка самолета со свободным
рулем высоты Хтнс
138
6.2.3 Выбор эксплуатационных центровок, площади горизонтального оперения и
эффективности руля высоты
Положение предельных эксплуатационных центровок самолета (ХТпп,ХТ1 ) и
требуемую площадь гори юн ильною оперения (или коэффициент А|О= Slo ГН))
при заданном конструктором дишаэоне эксплуатационных центровок АХЪ = Х,
у определяют из совместною выполнения следующих устовии
•Лтпп
]) обеспечение минимальною запаса продольной статической устойчивое ш
на предельно задней центровке,
2) балансировка самолещ как при заходе на посадку и посадке, так и при
уходе на второй круг с предельно передней центровкой,
3) подъем носового колеса для самолетов с шасси, имеющим носовое колесо
на заданной скорости при предельно передней центровке
Выполнение этих условий рекомендуема проверять на диатрамме
Аго—f (XT,Xi ) с учетом того обстоятельства, что требуемое значение коэффициент i
А го практически линейно зависит от положения центровок самолета
В связи с этим положение прямых линий А[О(х1,Х1 ) определяется по двум
точкам для компоновки без ГО и для компоновки с ГО с предварите тьно
выбранным конструктором значением Аго (или при Аго модели самолета,
испытанной в АДТ)
Диаграмма Av(Xt,Xf) строится на основании
— расчета аэродинамических характеристик,
— пересчета характеристик прототипа,
— результатов испытании модели самолета в АДТ
Надежнее всего определять положение линии на диаграмме по испытаниям
модели самолета в АДТ, которые должны включать в себя испытания с разным
положением механизации крыла проведенные для компоновки как с ГО, так и без
ГО
Для примера рассмотрим показанную на рис 6 3 диаграмму Аго(Хг,Хр ) ляя
легкою пассажирского самолета обычной компоновки с массой G=5t с
механизированным прямым крылом и винтомоторной группой в носовой части
фюзеляжа Самолет имеет шасси с носовым колесом
Линия А представляет собой линию аэродинамических фокусов , на которой
запас продольной статической устойчивости самолета с фиксированной ручкой
управления и без учета влияния обдува от винтов равен нулю (т е тс/ = 0)
Точка 1 соответствует положению аэродинамического фокуса компоновки без
ГО
Точка 2 соответствует положению аэродинамического фокуса само iera с
предваритечьно выбранным значением Аго
Внутри области эксплуатационных режимов полета, характеризуемых
высотой, скоростью полета, углом атаки и положением механизации крыла,
расчетным будет такое их сочетание, при котором аэродинамический фокус
самолета будет занимать самое переднее положение Это будет соответствовать
наименьшему запасу продольной статической устойчивости самотета и одному из
расчетных случаев
Чтобы определить предельно заднее положение центра масс самотета
необходимо учесть следующие возможные потери запаса продольной статической
устойчивости (см рис 6 3)
www. vokb-la. spb.ru
139
A] — уменьшение запаса устойчивости (m**) при освобождении рутя высоты
(см п 6 4 3) Это уменьшение зависит, в основном, от соотношения
производных шарнирных моментов руля m*UiD mJ?, и для легких самолетов без
роговой компенсации рузя высоты может доходить до А =0,08,
Аз — уменьшение запаса устойчивости (гп/у) за счет обдува струями от
работающих винтов (см п 6 4 2) Уменьшение запаса (т£у) от винтов подлежит
расчету, оно зависит от распотожения винтомоторной группы на самолете и
ветичины коэффициента нагрузки на винт В=Р q FB Для винтомоторной группы
распозоженнои в носовой части Фюзеляжа, потери т?’ на взлетном режиме работы
двигателя могут составить A m‘v (в)=0,05-0,15
Для компоновки самолета с двумя двигателями на крыле потери от
обдува винтами могут составить Лп$ = 0,15 0,2
Л, — уменьшение запаса продольной статической устойчивости за счет
упругих деформаций конструкции (для легких самолетов влияние упругости
конструкции обычно мало)
На рассматриваемой диаграмме AIO(x,,Xf) указан запас А4 — это
минимальный запас продольной статической устойчивости самолета m^jn
(см п 6 2 2), назначаемый из соображении безопасности полета
Перечисленные выше поправки смешают аэродинамический фокус самолета
вперед, поэтому переход от точки 2 к точке 3 диаграммы осуществляется по
формуле
ХГ1 = ХЬ- (Ai f Л-» - А3 +Д,)
Таким образом, точка 3 на диаграмме соответствует предельно задней
эксплуатационной центровке самолета, при которой обеспечивается минимальный
рекомендованный запас продольной статической устойчивости самолета (т^) с
учетом освобождения руля высоты и при максимальном влиянии обдува струями от
винтов (режим взлета или уходт на шорой круг)
140
Линия В на диа|рамче определяет положение предельно передних центровок
самолета, при которых обеспечивается балансировка самолета в воздухе при
лосадкс в момент касания ВПП основными колесами шасси Масса самолета на
посадке принимается как средняя при штатной (обычной) посадке
Расчеты продольных балансировок самолета на посадке можно производить
также из условия, что для легких самолетов в момеш касания ВПП основными
колесами скорость V11OC близка к скорости св тлившая, вычисленной без влияния
земли
^пос (1 1 >0*>) Vt при G,roc, 5j пос
Положение точки 4 на линии В диаграммы находится из условия
балансировки продольных моментов рулем высоты, отклоненным почти на
максимальный отрицательный угол (на кабрирование) 5би^0,9 6М[Ч, при этом
двигатель работает на режиме малого газа
Разрешая уравнение продольной балансировки 1т/=0 относительно
неизвестной Х1(, , получаем
111/ (Ипос 1пос ,ХТЧО, , h3 mm) + mZyti|)(0,9 бнтгн)
Xtiui = XrWM / " \
Су рТпос , 6j пес ,h j 1|||П ,0,9 5у mix)
Здесь коэффициенты с5 и ш, должны соответствовать посадочному углу ттаки
(а11ОС), посадочному положению механизации крыла (63 П(Х) с учетом влияния земли
(экрана) 1тэ= шш касание ВПП колесами)
При определении величины коэффициента следует учесть потерю на
балансировку, связанную с отклонением руля высоты на большой отрицательным
угол Ас (6ОЗЛ) = ct 0 9Й1РДХ
Необходимо проверить также балансировку самолета на предел^ < передней
центровке при переходе от режима захода на посадку к режиму ухода нт второй
круг ( обычно высота Н=15 м) с переводом двигателей на взлетный ре,г им работы
В связи с этим может появиться момент от тяги двигателя и увеличится влияние
обдувки от работающих винтов (взлетный режим) Величина Х-Р,Г1 в этом с Еучае
определяется формулой
_ Рк.и, 11 ш
т,(азп,5пкч. Ввхч, Х-гмад) niZvnp(0,9b у max, Вин) цЗЬ ч
Су(ujq,6,пос Вв1Г,0,95втах) Су(а311,5пях.,В[Л1,0,98нпач)
Здесь а311 — угол атаки при заходе на посадку, который обычно определяется
из условия Vjn=l,3Vv(53noc, G), Вв1Л — коэффициент нагрузки на винт при
взлетном режиме работы двигателей
При определении коэффициентов cv и птг необходимо учесть поправки,
связанные с влиянием обдува струями от винтов (см п 6 4 2) Положение точки 5
на линии В (рис 63) находится из условия самобалансировки компоновки самолета
без ГО В формулах для ХП1|1 в этом случае величины су и mz определяются для
компоновки без ГО и кроме того отсутствует слагаемое 111/0,9 6mJX)
Как правило, для легких самолетов с шасси, имеющим носовое колесо,
расчетным случаем определения ХТП11 является подъем носового колеса на заданной
скорости при разбеге по ipVHTV
На диаграмме этот случай соответствует линии С Рассматривается
положение самолета при разбеге в момент подъема носового колеса Схема
Действующих сил и моментов приведена на рис 6 4 В дополнение к
аэродинамическим силам и моментам, а также к тяге двигателя Heo6xo4MMdW6okb-lasPbm
141
Рис 6 4
расчете условии подъема носовою ко теса
добавить реакцию основных колес шасси,
силу трения колес, а также момент oi тяги
двигателя
За рекомендуемую скорость подъема
носового колеса обычно принимается
скорость VIIH1S и 1,1 Vc (6, с учетом того,
что скорость отрыва самолета от земли будет
равной
^отр ~ 1 j2Vc (i>j ВХ|)
Обычно для легких самолетов разница в скоростях подъема носового колеса
и отрыва самолета составляет
-Vfl1IK * JOISkm/ч
Рассматривается балансировка самолета в момент времени, когда все колеса
шасси еще касаются ВНП, но руль высоты онслонен на 0,95u тах на кабрирование
для подъема носового колеса
Положение точки 6 на диаграмме находится из условия продольной
балансировки самолета, которое имеет вид
вх!> тип мод, ^тип" ^тчот) Cy(ckr, Взд, 11э П11П, Вв1[)+
+ (G - Y)(XTnn -Хш) (G-Y) f,p h„M
Я 8.11$ Яцзд S Ь\
Здесь обозначено
Р вдп Идя
Чвх1 Ь/
*Hnz(0,96B max) О
Идя — плечо тяги двигателя (положительное если тинйя действия тяги
проходит выше ЦМ),
hltM— расстояние от ЦМ до ВПП,
fTp - коэффициент трения ко чес, принимается равным 1=0,03 для бетона и
f=0,1 для грунта
Положение точки 6 на диаграмме опредетяется из условия самобалансировки
компоновки без ГО при отрыве носового колеса
На этом почти завершается построение важной и информативной диаграммы
Аго( Хг, Хр), в результате чего пока определен только диапазон эксплуатационных
центровок Д Хтэ моц (отрезок 7-3 диаграммы) для значения Аго мол
Диапазон эксплуатационных центровок, необходимый для самолета Д ХГ) сам,
в общем случае отличается ог полученного диапазона Д Xrj мол, в связи с чем
подлежит определению и требуемая ве шчина Аго Для этого на диаграмме
откладывается горизонтальный отрезок 8-9, равный требуемому (заданному
конструктором) диапазону эксплуатационных центровок Д Хтэсам
В итоге всех расчетов и построении получены (см рис 6 3)
- точка 8, соответствующая предечьно передней центровке самолета ( ХТШ1),
- точка 9, соответствующая предельно задней центровке ( Хтпз),
- величина Аго сам — требуемый коэффициент статического момента площади
ГО самолета
Вопрос о выборе центровок и требуемых размеров ГО является одним из
главных при проектировании и создании самолета В связи с этим построение
диаграммы Аго( Хт, XF) рекомендуется проводить неоднократно, на всех этапах
разработки самолета (техническое предложение, эскизный проект, подготовка
первых полетов) по мерс уточнения компоновки самолета и его аэродинамических
характеристик
142
Для самолетов, имеющих шасси с хвостовым ко тесом, определение
предельно задних центровок, по-существу, такое же, как и для самолетов с
носовым колесом необходимо обеспечить определенный минимальным запас
продольной статическом усюичивости т?‘тш
При определении предельно передней центровки для самолетов с хвостовым
колесом расчетным обычно является случаи посадки 'на 3 точки , когда
необходимо i б таксировать рулем высоты значительный продольный момент
самолета на большом угле атаки (аст = 14° - 16°) и дополнительный заметим
момент влияния близости дсмли (Ani, = -0,1 - 0,15, для низкоплана и палубного
J О) Кроме гою, предельно передняя центровка должна быть на 5%-7% бо lee
задней, чем центровка, при которой происходит капотирование самолета на взлете
при разбеге по грунту
6 2.4 Требования к усилиям продольного управления
Усилия на рычаге управления на легких самолетах яв тяготея следствием
преодоления шарнирных моментов руля Усилия предоставляют летчику
важнейшую информацию о режиме палета и кроме того могут быть средством
повышения безопасности попета
К величине усилий на ручке предъявляются следующие требования
- они должны быть ощутимыми, чтобы обеспечить летчику чувство
управления
- усилия должны быть достаточно большими, чтобы предупредив
непреднамеренный вывод самолета за эксплуатационные ограничения но не
должны вызывать физического утомления летчика
Максимальные продольные усилия на рычаге управления не должны
превосходить по требованиям АП-23 следующих значении
- при кратковременных усилиях 27,2 кг для ручки и 34 0 кт дгя штурвала
- при продолжительных усилиях 4,5 кг (ручка и штурвал), (рис 6 5)
К кратковременным усилиям относятся, например, усилия, возникающие на
рычаге управления при отрыве самолета, усилия при перебалансировке самолета от
выпуска-уборки механизации крыла, а также при изменении режим i работы
двигателя
Длительные усилия соответствуют условиям при которых невозможна по
каким-либо причинам балансировка этих усилии, например, дня заключительного
этапа посадки когда летчик не должен (и не может) отвлекаться на выполнение
второстепенных операции
Формирование достаточно больших усилии на рычаге управления при выводе
самолета на границу эксплуатационном области традиционно являлось способом
Рв “ повышения безопасности полетов Именно
АП 23
нормальная категория самолетов
Рпмх штурвал
поэтому в нормах АП-23 и FAR-23 имеется
требование к минимальном величине усилии
на рычаге управления при выходе на
перегрузку ПуП1ах Эти усилия зависят от
вида рычага управления, от категории
самолета и связаны с его максимальным
весом (см рис 6 5)
ЮТО 2000 3000 4000 5000 <JnlM
Рис 6 5
Например, для самолетов нормальной
категории с максимальным весом
www.vokb-la.spb.ru
143
Gm n= Ю00 2200 кг усидмс для выхода на максимальную эксплуатационную
перегрузку должно быть не менее, чем
|кг] для штурвала,
а™-[кг| для ручки управления
Требуемые усилия получаются достаточно большими, и практика создания
легких самолетов показала, что возникает проблема в выполнении указанных норм
Цуги решения этой задачи рассмотрены в разделах 6 2 5 и 6 2 6
Большое внимание в требованиях уделено обеспечению определенного
характера зависимости балансировочных усилий по скорости полета (так
называемая устойчивость по скорости), а именно при увеличении скорости должен
быть прирост положительных балансировочных усилии ("от себя"), то есть
производная Р^ должна быть положительной (0)
Практика показала, что летчики придают этому |ребованию большое
значение, так как устойчивость по скорости характеризует способность самолета
’держать" балансировочную скорость с освобожденным управлением, что особенно
важно на длительных режимах полета
Явные требования к величине Р& в нормах отсутствуют, но необходимо
получить в летных испытаниях положительную оценку летчика и подтвердить, что
любое существенное изменение скорости от балансировочной приводит к отчетливо
ощущаемому пилотом изменению усилий на рычаге управления (АП-23 173|
Однако, в нормах имеется требование, которое определяет связь межд\
степенью устойчивости по скорости и величиной сил трения в проводке
управления, а именно необходимо, чтобы при уходе от балансировочной скорости
и плавном снятии усилии с рычага управления новое значение балансировочной
скорости удовлетворяло условию (см рис 6 б)
JV2-V6a7l v^-v
max
I * бал v бал
0,075 для самолетов местных воздушных линий.
0,1 для самолетов общего назначения
Для выполнения этого требования необходимо, чтобы при заданной
(замеренной на самолете) силе трения в проводке управления выполнялось
следующее условие
Рис 6 6
Рис 6 7
144
Рв
для самолетов обще! о назначения
Зависимости требуемой устойчивости по скорости Р* (VCl£bI) при различных
силах Греция для всех категорий самолетов, кроме самолетов местных воздушных
линии, приведены на рис 6 7 В летных испытаниях самолета достаточность
устойчивости по скорости должна бьпь продемонстрирована в определенном
диапазоне скоростей, а сама балансировочная скорость назначается в зависимости
отрсжима полета [АП-23 175]
6.2.5 Обеспечение продольных усилии в горизотальном полете
Нсобхотимые величины усилии на рычаге продольного управления нт легких
самолетах с ручной (бсзбустернои) системой управления обычно обеспечиваются за
счет аэродинамических шарнирных моментов руля высоты
В таких случаях для сбалансированной в весовом отношении системы
продольною управления и при отсутствии в ней трения усилие Рв определяется по
формуле
Рв q SBbn Kro KI(IB (<x, 8B, tb),
в которой величины a, 8B и тв должны удовлетворять условиям ба !ансировки
самолета в горизонтальном полете,
с..(о,8„)= °
tn/a, Зв, тв, Р) = О
Р = q S Сха
Обычно коэффициент шарнирного момента рутя высоты линеияо зависит от
углов аго, 6В, тв при умеренных углах (± 10° - 15°) В этом стучае ветчину тшв
можно представить в виде
шшв гппю-к гПщ™ а.го + тшв тв,
где аГо~сгс1ф~^<1)с|тф“е
При больших величинах углов aro, 6В, тв коэффициент шарнирного момены
тшв может быть существенно нелинейной функцией своих аргументов, особенно
при большой степени осевой компенсации руля высоты Это обстоятельстве
необходимо учитывать при определении усилии продольного управления на
границах эксплуатационной области режимов полета
Основным параметром, через который обычно воздействуют на величину
шарнирного момента, является степень осевой компенсации руля высоты, при
увеличении которой происходит уменьшение шарнирных моментов руля и
уменьшение усилии на рычаге управления
На легких самолетах общего назначения (G < 2000 кг) балансировочные
усилия на ручке управления бывают небольшими, и для создания заметного чувства
управления необходимы малая степень осевой компенсации, вплоть до минимально
возможной конструктивной компенсации, и рули высоты большой хорды (до
Ьрв = 0,5) Иногда этого бывает недостаточно, и необходимо использовать в
системе продольного управления дозагружающую пружину
Величина производном Рв определяется обычно графически по зависимости
PB(V) Величина Рв может бьпь также определена по формуле
pv=™ к GbB SB ГГ. S вУг_Р^Р /
рв 2K1U К1Ш1 v s F 2P J G Z]’
zokb-la.spb.ru
где
F- площадь,сметаемая винтом (F=-|^ ),
ni” - производная момента тангажа по коэффициенту нагрузки на винт.
Требования к величине Рв рассматриваются в разделе 6.2 4.
Эти требования обычно выполняются, если запас продольной статической
устойчивости самолета с освобожденным рулём высоты ш,у (раздел 6.4.3) не
слишком мал. При расположении двигагслей выше центра масс устойчивость по
скорости увеличивается, она может увеличиваться также за счет обдувки крыла и
j оризонгального оперения струями от винтов в тех случаях, когда увеличение
интенсивности обдувки (то есть увеличение коэффициента В) приводит к
появлению пикирующего момента т® < 0.
6.2.6 Требуемые характеристики продольной управляемости самолёта
Основными характеристиками продольной управляемости самолёта являются
расход усилий на рычаге продольного управления на единицу нормальной
перегрузки, характеризуемый производной Рву, и расход рычага продольного
управления на единицу нормальной перегрузки, характеризуемый производной
Хв'. Производные P"v и Хву называют критериями продольной управляемости
самолета.
Оценку производных P"v и X"v осуществляют на расчётных режимах полета
- при заходе на посадку и в крейсерском полёте. Для сбалансированной в весовом
отношении системы продольного управления и при отсутствии в ней пружин и
грузов располагаемые значения производных P”v и Хву можно рассчитать по
следующим формулам (принимается Су“= 0):
~ с ‘°пс Кшв'Кто SB Ьв,
S ш/
________EXnl?"____
“ '57,3 кшв ш*«
Величины Р"у и X"v должны удовлетворять следующим требованиям:
1) при минимальном (по абсолютной величине) градиенте Рву должна
обеспечиваться нормируемая величина усилия при выходе на максимальную
эксплуатационную перегрузку, то есть, должно в среднем выполняться неравенство
|РВУ1 > РвПу = , ( ——у. Зависимость !Рву1 от веса самолета показана
'<т гап1 1пэ - 1 ср тш
\ > max /
на рис. 6.8. Расчётными для проверки этого условия являются режимы полета на
больших приборных скоростях при предельно задней центровке.
2) характеристики продольной управляемости должны получить хорошую
оценку лётчика.
Дтя получения такой оценки величины Рву и XBV должны лежать в
определенных пределах.
146
Самолеты нормальной категории
Рис. 6.8
В ЦАГИ разработан метод расчета
рекомендуемых оптимальных характеристик
управляемости Р„у и Х"у лёгких самолетов на
основе эксцеримешальных исследований на
пилотажных С1ендах [6,7,8]. В соошетствии с
этим методом основными параметрами,
on редел яющи ми от имал ьные зн ач ен ия
характеристик продольной управляемости легких
самолётов, являются тип рычага управления
(штурвальная колонка, ручка), градиент загрузки
рычага управления Р*1 , скорость полета V,
производная нормальной перегрузки по углу
атаки п“ и сила трения в проводке управления
Р1р. Влияние параметров V, nV и Р*" на
Штурвал управления Рп> 1кг
Рис. 6.9
оптимальные значения характеристик
управляемости самолёт показано на рис. 6.9 и
6.10.
На практике реальные значения градиента
Рд* могут иметь значительный разброс,
связанный с изменением режима полета, веса и
центровки, в связи с чем они могут отличаться
от оптимальных значений.
У конструктора имеется возможность
изменять степень осевой компенсации руля
высоты (изменение коэффициентов шарнирных
моментов руля щ?» и гл™) Кроме того, можно
рассмотреть разные
кинематической
управления с
возможность
коэффициента
Ручка управления Ргр- 1кг
О -50 -Ю0Х^гт.“%,п
значения
линейной <
рулем Кигв, а
применения
Кшв, при этом
К
выполнить условие: s 3.0.
коэффициента
связи рычага
также изучить
нелинейного
рекомендуется
При малых градиентах P"v можно
использовать в системе продольного управления
дополнительные балансировочные грузы и
дозагружающие пружины.
Таким образом, конструктор должен найти
разумное сочетание параметров системы
Рис 6 10 управления, обеспечивающих оптимальные
характеристики управляемости самолета.
Рекомендуется осуществлять отработку
Характеристик продольной управляемости самолёта на пилотажном стенде При
этом стенд должен быть снабжён специальной системой загрузки рычага
продольного управления, позволяющей имитировать воздействие
аэродинамического шарнирного момента с учетом трения в проводке управления.
Рв = ~ KtnB q SB-bn iiiniB*(tt > 5В, т„) + РТр •
Такие системы загрузки использую! ся на пилотажных стендах ЦАГИ.
www.vokb-la.spb.ru
147
До проведения стендовых исследований на начальных стадиях разрабощи
самолёта необходимо, чтобы степень уменьшения загрузки рычага продольного
управления, обусловленная изменением угла атаки в переходном процессе при
Рв
управлении перегрузкой и характеризуемая параметром ™ (рис. 6.11), была бы
11 тт
нс меньше некоторой минимально допустимой величины. Величина параметра
Рв
р- — может быть оценена по формуле
Да,
где
A One ” изменение запаса статической устойчивости по пере!рузке за счёт
освобождения руля высоты (см. разд. 6.4.3),
v ~ заброс угла атаки в переходном процессе при ступенчатом отклонении
руля высоты,
. 2 _ > о ‘ И а ; _ eJz с> ‘Gn’ 7 ’GbV
Рекомендуется, чтобы величина РВт(п Р„~„ PB была не меньше, чем и- = 0,6 ч- 0,7. “imx
Расчётными для оценки выполнения этого условия являются режимы полёта
на максимальной высоте при предельно задней центровке. Повысить величину
РЕ
отношения —™ можно за счёт уменьшения влияния освобождения руля высоты
на запас статической устойчивости по перегрузке, то есть, уменьшения величины
пт'иш (см. РазД- 6.4.3), а также за счёт выбора больших значений минимального
запаса продольной статической устойчивости ш^л при смешении
эксплуатационного диапазона центровок вперёд.
На легких самолётах общего назначения, имеющих взлётный вес до
2000 2500 кге, при задних центровках градиенты усилий Рву получаются малыми.
Обычным средством
увеличения усилий на рычаге
управления является уменьшение
степени осевой компенсации руля
высоты вплоть до конструктивной и
увеличение хорды руля до Ьв « 0,5.
Если этого недостаточно, в
системе продольного управления
устанавливают дозагружаюшие
пружины или грузы (см. рис. 6.12),
иногда применяют кинематический
аэродинамический загружатель,
представляющий собой
сервокомпенсатор, но отклоняемый в
ту же сторону, что и руль.
148
к рулю высоты
Рис. 6.12
Схема включения грузов и пружин
в систему продольного управления
При наличии
продольною управления
производная Р"у возрастает на величину
АР? = Р? х"* >
системе
пружины
градиент загрузки рычага
на
где р*в
продольно) о управления,
обеспечиваемый пружиной.
Установка груза в систему
продольного управления, дающего
дополнительное усилие ла ручке
управления на пикирование, тоже приводит к увеличению градиента усилий !’"* за
счёт возникновения инерционных сил груза при создании нормальной перегрузки.
Если дополнительный груз в системе управления в горизонтальном полёте
(или на земле) изменяет балансировочное усилие на ручке управления на 1 кг, то
такой груз увеличит градиент усилий на единицу нормальной перегрузки тоже на
I кг/ед. пер., т е. Л. Р,"1 = Д P,PftM (пу ЕО).
6.3 Боковая устойчивость и управляемость
6.3.1 Общие указания и требования
Боковая устойчивость и управляемость самолета обеспечивается выбором
плеча и размеров вертикального оперения, угла поперечного “V” крыта. площадей
элеронов и руля направления, а также выбором характеристик системы управления.
Самолет должен обладать колебательной устойчивостью с зажатыми и
освобожденными рулем направления и элеронами на всех эксплуатационных
режимах полета. Для самолета с зажатыми рулями можно рекомендовать, чтобы
любое возмущение крена или рыскания практически затухало до 5% начальной
амплитуды не более, чем за 4-5 колебаний для нормального для этого класса
самолетов периода боковых колебаний, равного 3-5-5 сек. Освобождение рут я
направления и элеронов не должно существенно ухудшать затухание боковых
колебаний самолета; можно допустить увеличение числа колебаний до практически
полного затухания до величины 11^= 5-6.
Для самолетов рассматриваемого класса спиральная устойчивость бокового
движения не является обязательной, однако устойчивость этого движения является
более предпочтительной, чем небольшая степень неустойчивости.
Самолет должен правильно отвечать по крену на отклонение педалей руля
направления; при перемещении вперед правой педали должно развиваться
движение крена на правое крыло. Указанная связь движений является привычной
Для летчика и позволяет управлять движением крена посре1тством педалей руля
Направления.
Опыт летных испытаний показывает, что при возмущениях в боковом
движении летчик реагирует, главным образом, на движение крена
Поэтому желательно, чтобы в боковом возмущенном движении влияние
на движение крена было небольшим.
В качестве параметра, определяющего степень влияния движения
самолета,
рыскания
рыскания
ШхР
На движение крена, можно использовать известное отношение параметров---т-
Щу'
Jy
l^yw.TOkb-la-spb.
Жс!че1ьно чтобы величин! >того отношения ir превышал! 3,1-4,0 )roi же V
параметр определяет восприимчивость самолета к боковым порывам ветра, и чем f*
меньше величина этою параметра, тем слабее реагирует самолет на возмущения
угла скольжения при полете в неспокойной атмосфере При полете в неспокойной
атмосфере самолс! должен обладать возможно более слабой восприимчивостью к
возмущениям
Для 2-х двигательных самолетов должна быть обеспечена безопасность полета
при остановке одною из двшагелей В атом случае легчик должен располагать
промежутком времени до 2 сек для принятия правильного решения о действии
рычагами управления Поэюму за указанный промежуток времени самолет с
неотклоненными элеронами и рулем направления не должен попадать в опасное
положение Желательно в этом случае, чтобы на 2-ой секунде посте отказа одного
из двигателей угол крена по величине не превышал 15°~20° на режимах взлета и
ухода на 2-ои круг Угол скольжения в этом случае должен быть на 5 меньше
критическою для вертикального оперения
Для обеспечения безопасности полета на малых скоростях и
удовлетворительной маневренности на всех эксплуатационных режимах полета
самолеты общего назначения должны располагать достаточно высокой
эффективностью элеронов Эффективность элеронов должна обеспечивать
возможность перевода само 1ета из \становившегося разворо]а l yi юм крена 30°| в
установившийся крен противоположного знака на величину Avindx = 60° за
определенное время Т, которое зависит от режима полета и массы самолета В
соответствии с требованием АП-23 (FAR-23) указанное время Т дотжно составлять
не бочее
а) на режиме взлета
- для самолета с максимальным весом G < 2720 кг, Т = 5 сек ,
— для самолета с максимальным весом G > 2720 кг, Т = — сек,
б) на режиме захода на посадку
- для самолета с максимальными весом G < 2720 кг, Т = 4
Q
— для самолета с максимальным весом G > 2720 кг, Т ~
Выполнение этих требовании обеспечивается выбором
величины максимальной эффективности леронов Дп\(5э тах)
Важнейшими характеристиками поперечной управляемости явиыются
величины Х“" и Р“*, представляющие собой производные балансировочного
отклонения рычага поперечного X, управления и усилия на нем Рэ по угловой
скорости крена
= р-Ч = £PJL
Опыт летной эксплуатации показывает, что слишком малые величины
указанных параметров, так же как и слишком большие их величины, существенно
затрудняют пилотирование самолета и неприемлемы для летчика
Располагаемые значения Х"к и Р“д должны быть выбраны такими
(оптимальными), которые обеспечивали бы на основных режимах полета
выполнение задачи пилотирования с высоким качеством при низком загруженности
летчика и высокой пилотажной оценке самолета
Выполнение указанного требования осуществляется, в основном, выбором
величины г»®’ за счет подбора аэродинамической компенсации этеронов и
коэффициента передачи K1Ui от рычага управления к элеронам, а также, возможно,
150
сек
+ 1270
998 СеК
соо гветствутощей
за счет использования в системе управления элеронами пружины, допо шщелыю
увеличивающей загрузку рычага управления по крену
Для самолетов общего назначения можно указать следующие
ориентировочные величины характеристики поперечной уиравляемоыи Р“« при
управлении штурвалом - в пределах от -10 до -50 ki/рад/с, при управлении
центральной ручкой от —6 до —30 кг/рад/с
Максимальные кратковременные усилия на рычаге управления по крену при
выполнении любых предписанных данному классу самтетов боковых маневров,
включая предельные, например маневр для оценки максимальной располагаемой
эффективности элеронов, а также маневр по парированию отказа двитатсля не
должны превышать следующих максимальных величин
— для штурвала — 28 кг ,
- для центральной ручки - 14 кг
Максимальные продолжительные усилия на рыча!е управ тения по крену
(штурвал или ручка) не должны превышать величины 2,25 кг
Эффективность руля направления должна бьпь достаточной для энергичного
управления углом рыскания самолета на рупежке, при взлете, на посадке и в
крейсерском полете Максимальная эффективность руля н ап равнения с 25-30%
запасом должна позволять поддерживать установившееся скольжение при взлете и
при заходе на посадку с боковым ветром W = 0 2VW (где Vst> — скорость сваливания
в посадочной конфигурации для самолета с максимальным весом) При этом
эффективность руля направления не должна быть ниже значений
т®" - -0 0007 - -0 0008
Следует иметь в виду, что нетчик до 1жен иметь возможность создавпь
скольжение до 10°- 12е на малых скоростях полета при небольших усилиях на
педалях Дня этой цели необходимо обеспечить величину производной Р(,
определяемой из установившегося скольжения, в пределах 5 - -10 кг/рад
Кроме того, эффективность руля направления двухдвигательных самолетов
должна быть достаточной для боковой балансировки в полете с одним
неработающим двигателем на скоростях 1,2VC1 - 1,4VC с углом крена /1^ 5° на
работающий двигатель при наборе высоты с разрешенными по FAR-23 (АП-23)
градиентами набора и в горизонтальном полете
Максимальные кратковременные усилия на педалях, необходимые для
выполнения всех возможных боковых маневров, включая усилия развиваемые при
отказах, и предельные усилия, должны не превышать 68 кг При этом величина
продолжительно действующего усилия на педалях должна быть как можно меньше,
не более, чем 9 кг Указанные величины усилии на педалях обеспечиваются, в
основном, подбором аэродинамической компенсации руля направления
Следует иметь в виду, что на одномоторных самолетах рассматриваемого
класса для компенсации крутящего момента, создаваемого винтом и моментов,
обусловленных асимметрией планера самолета, требуются небольшие отклонения
элеронов и руля направления В этом случае для балансировки самолета по
усилиям можно допустить использование на задних кромках элерона и руля
направления пластинок, регулировка которых осуществляется на земле Тем не
менее, даже для одномоторных самолетов, особенно большой массы желательно
кроме отгибаемых пластинок иметь небольшой триммер на руле направления с
Углами отклонении тэр= ±5° для оперативной компенсации несимметрии самолета
Для двухмоторных самолетов триммеры на элеронах и руле направления
необходимы, и эффективность триммеров должна быть достаточной для полного
снятия усилии на рычаге управления по крену и педалях в полете с одним
www. vokb-la. spb.ru
151
неработающим двшагелсм на продолжительных режимах полета (обычно
крейсерский попет)
При эскизном проектировании самолета, исходя из приведенных требований,
должны быть выбраны
1 Плечо и размеры вертикального оперения
2 Размеры ортанов поперечного и путевого управления
3 Угол поперечного ‘‘V’ крыла
4 Характеристики системы управления ( KWj, КШя , П1щ'э, ).
6.3.2 Выбор параметров вертикального оперения
Основными параметрами вертикального оперения, определяющими его
эффективность, являются величина статического момента площади вертикального
оперения Вио — Цю 5во(где LliO и Sll(, — соответственно, относительное плечо и
относительная площадь вертикального оперения), а также удлинение Х11О , сужение
Лм> и У10л стреловидности Хво Выбор параметров вертикального оперения
необходимо осуществлять, прежде всего, из условия обеспечения необходимого
запаса путевой статической устойчивости и необходимого демпфирования
рыскания самолета Для выбранной из этих условии величины Вво ( LBO и SB0)
оценивается эффективность руля направления и, если она оказывается
недостаточной, то необходимо скорректировать величину Вво из условия
обеспечения требуемой эффективности рупя направления
Запас путевой статической устойчивости самолетов общего назначения
рекомендуется выбирать и j условия, чтобы круговая частота собственных боковых
колебаний была не менее 1рал/с При меньших частотах боковых колебаний
заметно ухудшаются характеристики боковой управляемости самолета Учитывая,
что частота собственных боковых колебаний определяется выражением
минимальное значение запаса пггевои статической устойчивости будет равно
Учитывая приближенность этой формулы, потребный запас пугевой
статическом устойчивости следует определять с 10% запасом от величины ni^mui
nl?«»r = 1J mL„
Расчетными случаями для определения величины производной Шу]|ОГ
являются малые скорости полета (режимы взлета и захода на посадку)
г, - пл?*,
Демпфирование рыскания самолета (значение производной Шу» ------------)
Ъ
необходимо выбирать в определенных пределах с тем, чтобы получить
удовлетворительное затухание боковых колебаний при возмущениях по рысканию и
хрену Статистика по самолетам общего назначения показывает, что значение
производном демпфирования рыскания Шу* желательно иметь не менее
-1,1 - -1,35 При этом большие коэффициенты демпфирования рыскания
желательно иметь у самолетов, имеющих меньшие величины производной
Шх"
демпфирования крена щ“* - ——
1х
152
’«'пог -
р Р к
НО
Величина статичсско; о момента площади вертикального оперения
определяется и» приближенной формулы
В ио L ВО S по
Входящие в эту формулу значения производных т§бш» и коэффициент
можно определить по данным, приведенным в следующем разделе (п 6 3 3)
Определив величину Впо, можно оцени >ь минимальное значение
относи 1 ед иного плеча вертикального оперения Цю из условия обеспечения
указанною выше демпфирования рыскания (п]уу— -1,1 -1/И) по формуле
т^ШсЛо В™, Lbo 1,2,
где коэффициент 1,2 учитывает вклад фюзеляжа
Обычно Lno определяется из конструктивных соображении При выборе LFt,
можно пользоваться следующим Величина плеча вертикального оперения Llw, в
первом приближении, зависит от площади крыла, при этом можно приближенно
считать, что LT1O =Kjs, откуда L1U,
К
Л’
Статистика по самолетам общего назначения обычном компоновки
показывает, что можно принять К = 1 - 1,15
Эффективность руля направления может быть оценена по форму ie
in' (с7*во)0 Nj К.ю Вк, п(ън ,хп) 1 05
Определение значении ,Х2, К™, Вы,, n(b„ -X,) дано в uie шюшем
разделе (п 6 3 3)
Из приведенной формулы видно, что эффективность р\ля направления в
основном, зависит от относительном хорды руля Ьн , его стреловидности и oi
величины В,.о самолета, которая, _в свою очередь, зависит от отмосптсльноз
площади вертикальною оперения SBO и от относительного плеча вертикальною
оперения Lao
Считая величины SDO, L11O и относительную геометрию вертикального
оперения выбранными, не представляет труда оценить эффективноегь pvij
направления по приведенном выше формуле
Если расчет по приведенной формуле показывает, что эффективность руля
направления получается ниже потребной, то в рамках выбранных размеров
вертикального оперения следует рассмотреть варианты увеличения эффективности
руля направления, например, за счет увеличения площади руля или (и)
уменьшения его стреловидности
В случае, когда при выбранных размерах вертикального оперения все
средства по увеличению эффективности руля направления исчерпаны, а его
располагаемая эффективность получается недостаточной (ниже требуемой), то
величину Вво следует увеличить в тJ"paoi раз.
6.3.3 Приближенный расчет степени устойчивости пути и эффективности руля
направления
Степень устойчивости пути самолета общего назначения, имеющею обычное
прямое крыло, в основном, определяется формами и размерами вертикального
оперения, фюзеляжа и могогондол При этом обычно фюзеляж и мото гондол WW*)vokb-la.spb.ru
153
Рис.6.13
крыле вносят дсстабилизйруюшес влияние
на устойчивость пути. Особенно
существенным может быть
дестабилизирующее влияние фюзеляжа,
которое тем больше, чем больше вынос его
носовой части относительно центра масс.
Степень устойчивоеги пути самолёта
может быть выражена формулой;
Рис.6.14
ШУ = П1»бво + + + тУинг +
+ mL
где
m!L - изменение степени
’ ф
устойчивости пути за счёт фюзеляжа,
m^L -изменение степени
устойчивости пути за счет мотогондол,
тошнит-изменение niy, учитывающее
влияние интерференции,
m^uo- вклаД в устойчивость пути от
вертикального оперения.
Определение ш? ф •
Расчетные и экспериментальные
исследования показали, что величина ш?.
Рис.6.15
может быть определена по формуле;
в д Зф *-ф
mV,n*i .Р
где - находится из рис.6.13-6.15.
которые построены для трех различных
форм поперечного сечения фюзеляжа,
Йф
отличающихся отношением в
Сф
зависимости от параметров "выноса" -
'S I
, ; пер '-пер
фюзеляжа р - - и отношения
Йф2
V
где:
5ф и Ьф- соответственно, площадь
боковой проекции фюзеляжа и его длина,
Sncp и Lriep - соответственно, площадь
боковой проекции передней части
фюзеляжа (включая надстройки) до центра
масс и ее длина,
йф- максимальная высота фюзеляжа,
Сф- ширина фюзеляжа.
154
Определение m?Mr.
Эксперименты в АДТ с моделями двухмоторных самолётов для различных
типов моторных гондол, расположенных на крыле, показали, что влияние
Мотогондол дестабилизирующее, и значения п?у, отнесенные к величине S-/,
находятся в пределах >Пумг = 0,0001 -ь 0,0002.
Для расчетов можно пользоваться средней величиной — 0,00015 (для
двухмоторных самолётов).
Определение Шуит..
Эксперименты в АДТ с изолированными крыльями показывают, что
собственный момент нуги крыла при скольжении близок к нулю. Основное
влияние крыла сказывается вследствие интерференции крыла и фюзеляжа и
влияния следа крыла на вертикальное оперение. Эффект взаимного влияния крыла
и фюзеляжа способствует увеличению устойчивости пути.
Испытания фюзеляжей с высоким, средним и низким положениями крыла
позволили установить приближенные значения 1ПуИ|п., приведенные в таблице 6.1.
Влияние следа крыла (и моторных гондол) на вертикальное оперение может
оказаться большим и может быть оценено с достаточной точностью лишь на
основании специальных испытаний модели в аэродинамической трубе.
Тип самолёта Одномоторные самолёты Двухмоторные самолёты
Низкоплан - 0.00045 - 0,00025
Среднеплан - 0,0002 - 0,00015
Высокоплан 0 0
Табл. 6.1
Определение
Доля устойчивости пути, создаваемая вертикальным оперением (ВО), может
быть определена по формуле:
Шу во ~ КВо ' С^ во ’ В во
Здесь К,и1 — коэффициент, учитывающий торможение потока в зоне ВО и
неравномерность распределения нагрузки по размаху ВО. В среднем К,ю~ 0,98
0,92, меныиее значение относится к высокоплану.
с“во — производная коэффициента боковой t силы ВО (отнесенной к
собственной площади ВО) по углу скольжения.
Значение производной c^Wl можно
(cL<?n представить в виде;
°"7- c5„ = (c?„)0K^(l-g,
005 s' где (c^bjJo - характеризует эффективность
-ооз -/ вертикального оперения при а—0 и Р< 12°! без
учета влияния крыла и горизонтального
001 1 2 з 5 6 Хвоэф опеРения. Значение производной (с?,^, в
зависимости от эффективного удлинения
Рис.6.16
Хно эф ~ может быть определено из
рис. 6.16. При этом коэффициенты Ki и Кз,
www. vokb-la. spb.ru
Это условие может служить верхней границей для выбора требуемого
значения производной . Можно рекомендовать, чтобы располагаемая величина
производной щР была несколько меньше прои людной in у.
Для самолетов с прямыми крыльями погребные величины производной in1*
обеспечиваются, в основном, за счёт придания крылу угла поперечного "V” и за
счет компоновки вертикального оперения. При этом обеспечение потребных т£
достигается приданием крылу примерно следующих углов поперечного “V”:
- для среднеплана ц/ —+2“-ьЗ°,
- для нигкоплана у =+5‘M>tI,
- для высокоплана \|/
Однако для каждой конкретной компоновки самолета эти величины должны
уточняться расчётом и экспериментально в аэродинамических трубах.
Расчет запаса поперечной статической устойчивости самолёта может быть
выполнен по формуле:
ш'х 111 ni^ -i m+ П1ГХЧ(.
где
ш1’ кр — коэффициент поперечной статической устойчивости крыла,
in* ио - вклад в пт£ от вертикального оперения,
т^инт ~ изменение в ш1’ за счет влияния фюзеляжа,
пт* vr — изменение гп* за счет моторных гондол.
Определение ni!JKp.
Для прямого крыла изменение поперечной устойчивости достигается, в
основном, за счёт изменения поперечного "V" крыла. Для расчёта вклада в
поперечную устойчивость "V” — образности крыла может быть использована
формула:
, --------------
- = -Ю (26,5 + 0,7л\ cos /
Определение 1п£ииг.
Влияние фюзеляжа на поперечную устойчивость определяется положением
крыла по высоте фюзеляжа. Дчя обычных схем самолёта значение производной
1Пх"ипг может быть определено по формуле:
mx ИНТ 10 )
где йф — максимальная высота фюзеляжа, Ьк - длина корневой хорды крыла.
В этой формуле коэффициент К принимается равным:
- для низкоплана К = 200,
- для среднеплана К = -20,
— для высокоплана К = -220.
При промежуточном расположении крыла по высоте фюзеляжа величину К можно
определить путем интерполяции.
Ориентировочные значения производной т£шгг Для различных типов
самолётов приведены в таблице 6.2.
158
•— Тип самолета Одномоторные • Двухмоторные
Низкопланы 0,00045 0,00025
— Среднепланы -0,0001 -0,00005
Высокопланы -0,0005 -0,0003
Табл. 6.2.
Определение in р мг.
Для обычных типов лпухмоюрных самолётов юндолы под нижнси
поверхностью крыла оказывают стабилизирующее влияние на поперечную
устойчивость. В этом случае изменение производной щр может быть принято
равным;
1)1^ =-0,00015.
Определение inpiw.
Вертикальное оперение оказывает заметное стабилизирующее влияние на
поперечную устойчивость, особенно для самолетов с относительно короткой
хвостовой частью фюзеляжа при высоком расположении вертикальною оперения.
Это связано с тем, что возникающая на вертикальном оперении при скольжении
результирующая боковая сила, приложенная в фокусе вертикального оперения,
имеет относительно продольной оси самолёта некоторое плечо YliO.
Значение производной тхрво может быть определено через значение
производной mvpBO по формуле:
тр = тр —-
111 X ВО 111 у ВО I
J LHO
Определение угла поперечного “У крыла
Потребный угол поперечного “V” крыла, удовлетворяющий желательной
(потребной) степени поперечной устойчивости самолёта, может быть определен по
формуле
cfy’
6.3.5 Определение потребной эффективности элеронов
Потребная эффективность элеронов, обеспечивающая выполнение указанных
выше требований, может быть рассчитана по формуле:
= ш х потр q § ’
где йх тир - потребное угловое ускорение крена, необходимое для изменения
угла крена самолёта на величину Ду,-ах = 60° за заданное время Т.
Величина <пХпотр зависит, в основном, от быстродействия по крену, то есть от
постоянной времени крена Ткр и от времени маневра Т, необходимого для перевода
самолёта из установившегося крена в установившейся крен противоположного
знака на угол Дутах = 60°. Постоянная времени крена приближённо может быть
определена по формуле
Jx 2V
Ткр~- ’
V - истинная скорость полета в м/с.
wy^vokb-la. spb.ru
Бели заллься законом изменения угла крена при выполнении указанного
маневра в виде
2t2 т
y(t)—Дутах( -у - 0,5) ври 0 < t < у,
2ГГ tV т
y(t)=Ayinax(0,5- - ---) при у < t < Т,
что достаточно хорошо согласуется с изменением угла крена в лётных испытаниях,
то после несложных преобразований и вычислений с использованием уравнений
бокового движения можно получить следующую приближённую формулу для
определения величины йХпотр (для реальных величин Ткр):
= 2А Y max
о X нотр -р
1 *кр
Из этой формулы следует, что потребное угловое ускорение крена тем
больше, чем меньше время маневра Т. В связи с этим расчётным случаем при
определении потребной эффективности элеронов является режим захода на
посадку, на котором по АП-23 требуется меньшее время Т для выполнения маневра
по перекладке самолёта из крена в крен на A/’max ~ 60°.
Подставляя полученное выражение для величины аКЛ()Тр в вышеприведенное
выражение для величины Дтх(6э), получим следующую формулу для определения
потребной эффективности элеронов
е
2V
элеронов зависит от
демпфирования крена ni“x и от размаха крыла t. а также от скорости полета V и
от времени маневра Г, При этом, чем больше демпфирование крена и размах
крыла и чем меньше скорость полета, тем требуется более высокая эффективность
элеронов.
Оценка потребной эффективности элеронов по полученной формуле
выполняется, как отмечалось. для режима захода на посадку при
V3n ~ I,3VCl- Входящее в формулу время манёвра Т определяется в зависимости от
массы самолёта (см. п. 6.3.1).
Определение требуемых размеров элеронов (размаха, площади, хорды) может
быть осуществлено при использовании различных методов. Практика расчётов
показывает, что дтя самолётов общего назначения прикидочную оценку размеров
элеронов можно проводить, пользуясь полуэмпирической формулой
И.В. Остославского.
So6 э
Дтх(6э) = - Кэ • Су —— - -- пэ ,
Атх(8, -4v - - 2. । ~
ТТКр q s r т
В приведенной формуле потребная эффективность
где
к3 = 0,6 + о,обб(п-1),
rs?
Пэ~ jSo6j’
S3 — площадь 2-х элеронов,
Боба “ площадь части крыла, обслуживаемая элеронами.
‘ расстояние между элеронами, отсчитываемое от середины размаха
элеронов,
И - сужение крыла.
6.3.6 Определение погребных характеристик поперечной управляемости
(производных Р-,”и Х"Т>
Указанные выше в качестве ориентировочных данных диапазоны значений
производной усилий по угловой скорости крена РТ для штурвала и для ручки
охвашвают довольно широкий, практически весь встречающийся па практике,
диапазон изменений этой производной для большого количества самолётов
paccMaipn наем ого класса. В то же время для конкретного самолёта оптимальные
значения производной PJ’ лежат в довольно узком диапазоне, то-есть значения
производной Рэ’опт, так же как и значения производной Х'Гот, Для определенного
режима полёта самолёта вполне конкретны и могут быть оценены расчётным
методом. Такой расчётный метод был разработан в ЦАГИ на основе
систематически экспериментальных исследований на пилотажных стендах |6|,|8].
Приближённо значения производных ХТопт и Рэжо1л можно вычислить но
формулам:
1 +
X"" опт ~ Аз’ ’ Т ~2 ~ ’
>ткр2и? +1
— их,
г j от г j л , опт-
Здесь К = 14 — весовой коэффициент,
ш. = 1,1 рад/с — характерная частота управления.
Зависимость А, от градиента загрузки рычага управления РУ и ог силы
трения в системе управления PJlp приведена на рис. 6.23.
Реальная загрузка рычага управления по крену (производная усилия по
перемещению рычага РУ) может быть приближенно подсчитана по соотношению
Р*’~ ~ Кш, ' ГПш q ' S3 ‘ Ьэ ~ Д Р> пруж
Здесь ДРУпруж ~ жесткость пружины, приведенная к рычагу управления
Располагаемые значения характеристик управляемости Ху и Р"” можно
определить по формулам: XT * т?— и P?x = Р?» X?’.
Кщ, 2V щ/’
Обычно оценку располагаемых и оптимальных значений характеристик
поперечной управляемости РУ и XT проводят для расчётных режимов полёта, в
качестве которых принимают режим захода на посадку и крейсерский полет.
Близость располагаемых величин характеристик поперечной управляемости
РТ и XT к оптимальным значениям можно обеспечить за счёт выбора загрузки
рычага управления, то есть величины РУ, а также за счет выбора величины КШ)
Оптимальное значение характеристики Х'Т можно определить также и
другим способом, если учесть соотношение ХТ~ „ , где величина ©у
Ткр -й/
характеризует собой чувствительность самолёта по угловому ускорению крена,
-х - qSf <5 г-
- г m/’ Klu,
J X
Оптимальная величина ©*> может быть определена из выражения
www. vokb-la. spb.ru
161
160
"Г 2 2
+ I кр И.
Зависимость ©^Aj=f(TKp,V) показана на рис. 6 24. Если для заданного
значения скорости V и рассчитанного значения Ткр по рис. 6.24 определить
величину ©3'АЭ, а по Рис- 6.23 — величину А_>, то тем самым будут определены и
величина (в*’, а затем и величина Х“х.
6.3.7 Оценка усилий при управлении элеронами.
Требования к шарнирным моментам элеронов
Приведенные выше соотношения для градиента загрузки рычага управления
Р' и для величины X“K позволяют получить выражение для производной усилия
Р-, по угловой скорости крена и х;
г ' к ms,aSb-AP« ."-MJ-
Гз m8j 7V Ч-ЭэОэ гэпруде s, tv IZ
П* х П1 х v 1Х ш,
Как уже отмечалось, значение производной Рэх для самолётов общего
назначения может иметь большие пределы изменений от -5 до -50 кг/рад/с.
Близкие к оптимальным величины производной Р“", отвечающие обычно большим
величинам из указанных пределов их изменений, достигаются, в основном, за счёт
подбора компенсации элеронов, а при необходимости и за счёт установки пружины
в системе управления элеронов. Из приведенного выражения видно, что величины
зависят от большого числа параметров, поэтому изменять производную Р“’ в
нужную сторону можно , в частности, корректировкой КШ[ и размерами элеронов
(S.j, Ьэ). Однако рационально поступать следующим образом.
По приведенному на рис. 6.24 графику А,—f(TKp,V) в зависимости от
истинной скорости полёта V и постоянной времени крена Ткр находят оптимальное
значение параметра (й^Аэ)0.
162
Определяют значение консшн гы Аэ из соотношения
По графику на рис. 6.23 в зависимости о г найденного значения ко нет ан 1ы А>
типа рычага управления и трения системы управления находят потребную величину
градиента загрузки рыча! а управления Р.^
Определяют потребное значение производной ш,,; и (или) погребную
жесткость пружины AP*Jlir,y)K, обеспечивающие оптимальные характеристики
поперечной управляемоеги, используя приближенное выражение
" - Кшэ П1щ ' А Рз'цруж-
Расчёт по выбору потребных величин коэффициента шарнирного момента
Шщ и жёсткости пружины APJ’Hpyx выполняют на характерных режимах полёта, в
качестве которых принимают режим захода на посадку и крейсерский полёт. В
начале расчёт необходимо выполнить без учёта пружины, то есть необходимо
стремиться обеспечить характеристики Р,” и Х“' близкими к оптимальным за счёт
только аэродинамических шарнирных моментов элеронов. На основании расчета
выбирается компромиссное значение производной гн^, определенной для режима
захода на посадку и для режима крейсерского полёта.
Оценку максимальных усилий на рычаге управления можно выполнить по
приближенной формуле
mx 1 "
Рассчитанные по этой формуле максимальные усилия на рычаге управления
не должны превышать указанных ранее предельных величин (28 кг — для штурвала
и 14 кг — для ручки) на всех эксплуатационных режимах полёта.
6.3.8 Расчёт боковой балансировки самолёта
в установившемся прямолинейном полёте
Необходимость боковой балансировки самолёта в установившемся
прямолинейном полёте возникает при выполнении взлёта и посадки с боковым
ветром, а также при выполнении полёта с одним остановленным двигателем
Балансировочные , углы отклонений руля направления и элеронов и
установившиеся значения угла крена в зависимости от угла скольжения
определяются из следующих выражений
d5M с15э Л dy
6" = -dTP; 6’-1Гр’ Y = dPp
„ d5,t dg3 dy . z й
Для определения — —, и — используются формулы (полагаем с/ =01.
dp dp dp
d 5„ _ m?mV - m§ mV
dp ’ mV mV “ mV mV ’
d 6Э mV - niy"
dp " my" mV - mV mV ’
www. vokb-la. spb.ru
163
dy - cg(m? m? m?jn?) - c?(m? mg - m? mg)
dP cy ni (in? m? - ni? in?) cos и
В первом приближении в этих формулах можно положить т? = 0 и ni?=0
С помощью этих формул можно получить производные величин Хн и Х;) по упц
крена
<16 „ d5 ?
dX“ — 1 dP dX3 J
dy KIUll dy ’ dy ’ Kllb ’ dy ’
dp dp
а также производные усилий на педалях и усилий на штурвале (ручке) по
углу крена
dPn__jz2 dX“ f 3„ |1 dP 1 Cl
dy k.......’ dy ’ П1ш d5„J 4 S" ’
dP, . dXj .
dy ~ К Ш , ’ Jy 111 I'1’ 4 • Sj • ЬЭ .
Балансировочные усилия на педалях и на рычаге управления по крену в
зависимости от установившегося угла скольжения определяются И1 выражений
Рн = - КШи Р • [т? + т?„ . q . sH b„ ;
op k doH/
Рэ = - Kllb ~ - P • m? - q • S3 • b,.
Потребные для балансировки в полёте с асимметричной тягой двигателей
углы отклонений руля направления и элеронов, а также балансировочный угат
скольжения определяются из следующих выражений
- с^(д mVjB - ш? - А тХДБ • m?) + сУп1 (m? - m? - m2 • ni?)y ^
c? (m? • m? - m? m?) - c? (mg • m? - m2 • mg')
AmyjB, (c? mJ- - c? jng) - A mXjB (c? m? - c? • mg) - сУп1 (mg • m? - m? mg’)у w
c?(m? • mt3 - m? m?) - c? (mg m? - mg mg’)
с*" (A тУдв - m? - А щХдв mg’) - cy rn (mg” mg’ - m? mg’) у
c?(m? • mg’ - mg" • mg’) - c? (m? mg’ - mg • mg’)
где:
^зад ” 3a^aHHbI>1 угол крена в полёте с неработающим двигателем [в
радианах];
А тУдц и А тХдв - безразмерные коэффициенты моментов рыскания и крена,
возникающие в полёте с одним неработающим двигателем.
Величины А п1Удп и А тХдв определяются в разд. 6.4.2.
В первом приближении в этих формулах также можно положить m? = m?=0.
Балансировочные усилия на педалях и рычаге управления по крену
определяются по формулам:
Ph = ” Кц1к (mg“ б(1 + mg,, р) • q S(l • bH ,
164
Рэ =• - KII!( Шш • q s, b;
6.3.9 Расчет характеристик бокового возмущенного движения
Для выполнения расчёгов можно пользоваться уравнениями в связанной
системе осей координат записанными в виде
р ' с, Р + йу cos а + в кsin а + у cos и • у + с5“ • би t с/1 • 5Э;
«у --- м^Р + м^-^ + м^-ох + Му' 6н + м$’-6э + амУлн;
«в, - м^Р + м^ оу + Мх’-йх + м^-бн + Мх’-бз + дМх^;
У=©х-(0у tgo.
Здесь
-g - Ч’ -С1
V G / S z
при j = p. -V 8y.
—j q • S £ Г пД my
m’ = ““jTv; +ZTTj
" о,
_ q-S - f f fnij, Jxv пД
Mv ” Jxv 2V\ Jy + Jy Jx J
’"ЛЛ
, q -S P e | my Jxy mx |
Mx~ Jj/2V\J, + J, J, J
1 ’ My
( Jxv ' .
Amy f Лгпх I - q S -I
V » Jx 31)
Д^удв= 7 7Г~л
i ! i *y I
при i = в x,« у
При этом для расчётов боковой балансировки необходимо положить равным
нулю центробежный момент инерции самолёта Оху=0). www.vokb-la.spb.ru
165
Для оценки боковой \стоичивосги обычно проводя! расчы корней
характеристического уравнения бокового возмущенного движения Расчеты
выполняются как правило, на ЭВМ
Для приближенной оценки корней, а также для выявления влияния
различных параметров на боковую динамическую устойчивость самолета
характеристическое уравнение бокового движения представляют в виде
(р / c.,)(p - хкр)(р2 + 2 4рР-г ©р) О
7огдт для небольших углов атаки, характерных для самолетов общего
назначения, используют следующие приближенные аналитические выражения для
корней
©р * м/,
g Мх0 М/’ - MVB МхИу _ g щхр Шу“у т/ тх“»
сп ~ v м/ М/х - м/ Мхи‘ ” V т? - тур т/'
Знание корней характеристического уравнения Хкр, ксп i© позволяет
рассчитать характеристики боковой динамической устойчивости самолета
1зат - у- время затухания боковых колебании до 5% начальной
амплитуды,
Т = — - период боковых колебаний,
©
Пзаг = = 0,48 ~ ~ число колебаний до практически полного затухания
1 ьр
(до 5%),
... 1
Ткр = !-- - постоянная времени движения крена,
|^кр[
„ I
Тсп - —- — постоянная времени спирального движения
, ^сп ,
Приведенные выше уравнения бокового движения самолета позволяют также
рассчитать переходные процессы при ступенчатом отклонении соответствующих
органов управления (5„ шш бэ), а также переходные процессы параметров бокового
движения самолета при отказе одного из двигателей при нулевых отклонениях
органов управления (5„ => б3 = 0)
166
6.4 Расчетная оценка коэффициентов демфируюицих моментов,
влияние работающих двигателей и освобождение рулей.
Вспомоштельные материалы
6 4 1 Расчет коэффициентов демпфирующих моментов
Системы управления легких самолетов общего назначения обычно не
автоматизированы При этом демпфирование возмущенного движения самане id
(затухание колебании) обеспечивается только за счез аэродинамических сил и
моментов образующихся на несущих поверхностях самолета при его вращении
вокруг центра масс Основными аэродинамическими коэффициентами
определяющими демпфирование возмущенного движения самолета, являются
с юдующие
1п“г — производная коэффициента момента тангажа но безразмерной угловой
скорости тангажа,
Ьл
у ,
in? — производная коэффициента момента тангажа по безразмерной
скорости изменения угла атаки
- b\ da
a " V dt
m? - производная коэффициента момента крена по безразмерной угловой
скорости крена,
— их 2\/ ’
niyy — производная момента рыскания по безразмерной угловой скорости
рыскания
f
Оу ’Оу Jy ,
nix’ ~ производная коэффициента момента крена по безразмерной угловой
скорости рыскания
тп“' — производная коэффициента момента рыскания по безразмерной
угловой скорости крена
Поскольку затухание возмущенного движения самолетов рассматриваемого
класса определяется только собственным демпфированием к точности определения
коэффициентов демпфирующих моментов предъявляются повышенные требования
Эти коэффициенты должны быть определены не только для эксплуатационного
диапазона углов атаки но и для больших углов атаки, в том числе и на режимах
срывного обтекания те в окрестности угла атаки aCyrlw< Наиболее надежные
сведения могут быть получены экспериментально в аэродинамических трубах
ЦА1И на специальных динамических установках Приближенные соотношения для
коэффициентов демпфирующих моментов, которые приводятся ниже позволяют
оценить величины этих коэффициентов только в небо гьшом диапазоне yi лов атаки
соответствующем линейным зависимостям аэродинамических коэффициентов
Более точные методы расчета могут быть реализованы при использовании ЭВМ
Соответствующие программы разработаны и используются в ЦАГИ
Приближенные соотношения для коэффициентов демпфирующих моментов
следующие www.vokb-la.spb.ru
Для коэффициента ш 7 7,
167
m7‘ro“ 60 mJ-
bA
Эффекгивнощь стабилизатора mJ может быть оценена по формуле
mJ--с"- Л,о-Кго,
— 41" ,
где с“п> - производная коэффициента подъемной силы ГО по углу атаки Ю
отнесенная к собственной (габаритной) площади ГО,
Кп> - коэффициент торможения потока в районе ГО. Обычно принимают
Кго= 0,9 ч- 0,95 для палубного оперения,
КГЛ= 0,95 : 1,0 для Т-образного оперения.
Величина mJ’Kp — определяется дчя
прямых крыльев по рис. 6.25.
Для коэффициента
de
m? =mj‘ro-
da
Для коэффициента mJ’, mJ’ = mj’^.
Величина т^’кр зависит, в основном,
от удлинения крыла и может быть
определена по рис. 6.26.
Для коэффициента mJ*, mJ¥ = mJ' крт
+ mJ*BO
Величина т^'кр определяется по
формуле кр ~-0,13су.
При этом в случае отклоненной
механизации вместо значения су берется
величина сУ1 = су - Дсу . где ДсУ
7 J У ” MAX MIX
приращение коэффициента подъемной силы
за счёт отклонения механизации.
Величина mJ* во определяется по
одной из следующих формул:
- при наличии результатов испытаний
в аэродинамической трубе
т?
.«“>„=114,бтП^ -3=
L7. ВО
— при отсутствии
испытаний
т^во^Чбт^ Lbo.
или
nixy 14,6 Yво •
Для коэффициента т“”, mJ’ * = mJу «>•
Величина т J¥ во определяется по
одной из следующих формул:
результатов
168
— при наличии результатов
испытаний в аэродинамической трубе
(щ? )2
niyy во=114,6 k .
С/Ж.
— при отсутствии результатов
испытаний
m^R<»= 114,6- L™
ИЛИ m?>w= 114,6 C?W) £ю2
Для коэффициента ,
ГПу* “* Illy ’ кр+ Ill j ж во-
Величина щ“х кр определяется по
рис. 6.27. При этом в случае отклоненной
механизации значение in';’’ Kp/cv<
полученное по рис. 6.27, следует умножить
на величину сУ1 = сх - Дс>1лм, где ДСутм “
приращение коэффициента подъемной
силы за счёт отклонения механизации.
Величина т“х |Ч1 определяется из
соотношения т“1 BC= т™* W).
6.4.2 Влияние работающих двигателей на аэродинамические
характеристики самолёта
На легких самолётах общего назначения обычно используются винтовые
двигатели. Обдувка винтами несущих поверхностей приводит к существенному
изменению аэродинамических характеристик самолёта, что необходимо учитывать
при решении вопросов его
Ан-24, е, 40' Хт=0.25
устойчивости и управляемости. Для иллюстрации на
рис.6.28 приведены зависимости cv(a) и mz(u)
для самолёта Ан-24 в посадочной конфигурации,
полученные по результатам испытаний большой
модели самолёта с неработающими (В = 0) и с
работающими (В = 1,2) винтами в АДТ Т-101.
Как показывают результаты эксперимента,
от обдува крыла и ГО струями от двух винтов
при возрастании коэффициента нагрузки на винт
до В=1.2 коэффициент подъемной силы су(а=8°,
б3==40°) увеличивается на Дсу=0,6. В этих же
условиях запас продольной статической
устойчивости самолёта уменьшается на
ДпС» ~0,17.
настоящее время не
расчётного метода <
характеристик <
двигателей,
способом
таких
. щрантированного обеспеч$|$%кЬ.1а spb „
характерце 1ик устойчивости и
169
В
надёжного
аэроди нам и чес ких
учётом работающих
единственным
определения
следовал ел ьно,
безопасных :
существует
определения
самолёта с
Поэтому
гарантированного
характеристик и,
управляемости на этапе создания самолёта является моделирование обдувки
струями от винтов при испытаниях моделей в аэродинамических трубах.
В ЦАГИ разработаны необходимые для таких испытаний методика л
оборудование. Малые размеры лёгких самолётов позволяют испытывать реальные
самолеты в натурной аэродинамической трубе Т-10] ЦАГИ с работающими
двигателями.
Рассматриваемый ниже расчётный метод позволяет получить приближенную
оценку влияния работающих двигателей на аэродинамические характеристики
самолёта. Результаты расчётов, полученные по этому методу, могут быть
использованы как оценочные на предварительном этапе проработки компоновки
самолёта и в последующем должны быть уточнены по результатам испытаний в
аэродинамических трубах.
При расчётных оценках рассматриваются следующие основные факторы,
определяющие влияние работающих двигателей, установленных на крыле, на
аэродинамические характеристики самолёта:
— наличие на винтах поперечной силы, возрастающей по углу атаки;
- обдув части крыла струями от винтов;
— изменение скосов потока и скоростей в районе оперения.
Наличие поперечной силы на винте приводит, главным образом, к смещению
аэродинамического фокуса по углу атаки (AXF[1c) и к изменению запаса путевой
статической устойчивости (Дт£ж)- Величину ДХГ(к можно оценить по формуле:
- =______1JKv Ь
ДХрпс ” 57?3cf(B)’s Хв’
В этих соотношениях обозначено:
г - число двигателей,
FB— площадь диска, сметаемого винтом,
- Хв
Хв = —5 " расстояние (в долях САХ) от
Ьд
центра масс до плоскости вращения винтов.
Ку “ коэффициент, определяемый
соотношением
Ку = КУ[ Ку, • КУ,-КУд,
где коэффициенты Ку , (i = 1...4)
определяются по графикам рис. 6.29^-6.32.
На рис. 6.29^6.32 использованы следующие
обозначения:
Фл 0,75 “ Угол установки элемента лопасти
на относительном радиусе г =0,75,
В - коэффициент нагрузки на винт,
Р - тяга винта,
Ьч— параметр, определяемый соотноше-
нием,
b, = 0325(bM., + bJ + 0,27b,„
Ку,
06
05
04
03
02
0 1
0 10 20 30 40 50 60 Ф^75
Рис.6.29
170
Рис.6.31
Ьлп (ь“ 0,3; 0,6; 0,9) -
относительная ширина лопасти (в долях
диаметра винта) на относительном радиусе
г -г..
X “ относительная поступь винта,
С1обл = а + Да(В);
ns - число оборотов ниша в сек.,
D - диаметр винта,
Ьк — корневая хорда крыла,
X) - расстояние от плоскости винта до
1/4 Ьк.
с?(В)«с?(В = 0) + Лс?6„(В)
Величина Л сУб1о рассматривается ниже
Обдувка части крыла струями от винтов
приводит, главным образом, к приращениям
коэффициента подъёмной силы и
коэффициента момента тангажа. Эти
приращения можно определить по формулам
В) = -в t I)2
~Сус Н (° Sxpofvi
с>с Я (“) = кь™(а’бз) - СУвпХ01’0^1 ” Skp >)L 1 >
L ^кр J
Дт76[Да, В) -
= В + 1) mZb_H (аОбд) _ mZc 1г (а)"| Бкр.обд
т/с_н («) = [mZ6n3 (а, 5л) - mZfitu (а,0)(1 - SKp з)1 “
Ькр з
Да(в) = - ^в+1^ + (Рдв^
где обозначено:
су6г5(аобл,8з), пь(,„(аобл - коэффициенты подъемной силы и момента тангажа
самолёта без горизонтального оперения при отклоненных закрылках и значении
угла атаки, равном cto6jl, сУбп> (а^О), mZ6nj(a(,filtl,0) - то же при 53=0;
сУс н, in7t н, - коэффициенты подъемной силы и момента тангажа в сечениях
крыла без обдувки;
Skp 3
SKp i
закрылками,
$ -относительная площадь части крыла, обслуживаемой
~ SkB Обл. _
5Кр.обд.= —£-----относительная площадь части крыла, обдуваемой винтами,
Флв “ угол между осью винта и плоскостью хорд крыла.
www. vokb-la. spb.ru
171
При использовании лич формуй следует учитывать, что угол атакц’
отсчитывается от плоскости хорд крыла, при отсутствии закрылка следует положить5
5з=0
При вычислении Б1фОб?1 можно считать, что площадь крыла, обдуваемая
винтом одного двигателя, равна произведению диаметра винта на хорду крыла в
месте установки двигателя
1 ак как само четы общего назначения обычно имеют прямые (прямоугольные
или трапециевидные) крылья, и аэродинамический фокус крыла практически не
зависит от положения механизации, то можно считать, что обдувка крыла не
оказывает влияния на положение фокуса, то есть, что
ЛХг„(В)аЛхГп,
Изменение скосов потока и скоростей в районе горизонтального оперения
приводит к изменению, главным образом, момента тангажа Приращение
коэффициента момента тангажа можно оценить по формуле
Дт/га(а,В) [l(Vl+B + l)2mZm (alu(B))-т7го(аю(0))] StovC;i
где
аю(В)= аго(0)+Д а10(В),
аго(0) = а + ч> - е,
Даго(В) = КдаДа(В)-ДЕобд,
Кда= 0,4В-0,065В2 (В < 2,5)
А Eoft “ < Л Cv6m
^кр обд
7; Sro обд
8ГО обд = г-- " обдуваемая часть площади горизонтального оперения
При вычислении Sloo6n можно считать, что в районе горизонтального
оперения диаметр струи равен диаметру винта, а ось струи совпадает с прямой
которая проходит через точку, лежащую на 25% хорды крыла в месте установки
двигателя, и составляет с осью винта угол равный.
Фетр + Фдв + Аообд - е - Деобя или фстр =
- е -Деоод
Ось струи в районе оперения находится выше оси винта при фстр > 0.
Смешение фокуса за счет обдувки горизонтального оперения можно оценить
по формуле
X Л mZro(a, в)
Ду ------------~---------------
с«(в = 0) + дс;вго(в)
В результате общее смешение фокуса самолета, обусловленное влиянием
работающих двигателей (ДХЬобд), которое необходимо учитывать при выборе
центровок самолета, будет определяться влиянием поперечной силы на винте
(Д ХГпс) и влиянием обдувки горизонтального оперения (АХГп(Д1 )•
AXFofo * + ЛХ*=пс
Общее изменение коэффициента подъемной силы, обусловленное влиянием
работающих двигателей, определяется практически обдувкой крыла
Дс'<* " АсУ(,„.(а’В)-
Более подробно вопросы влияния работающих двигателей на
аэродинамические характеристики самолета изложены в работе ]12]
Отказ одного из двигателей приводит к значительному изменению влияния
работающего двигателя на аэродинамические характеристики самолета В качестве
172
примера на рис 6 33 и рис 6 34 приведены некоторые из результатов испытании в
дДТ Т-101 макета самолета Ан-8 с двумя и с одним работающим двигателем При
одном работающем двигателе уменьшается коэффициент подъемной силы, и
возникают значительные моменты рыскания, крена и тангажа, причем, вследствие
тот о, что винты обоих работающих двигателей вращаются в одну сторону,
абсолютные величины возмущении при отказе левого двигателя и при отказе
Рис.6 33 Рис 6 34
В настоящее время отсутствует методика, учитывающая влияние
закрученности струи, приводимые ниже приближенные формулы также не
учитывают этот эффект
Уменьшение коэффициента подъемной силы и изменение коэффициента
момента крена можно оценить по формулам
’где
Д су - увеличение коэффициента подъемной силы за счет обдувки при
работе двух двигателей,
2ДВ — плечо силы тяги двигателя (положительно при работающем правом
Двигателе)
Сложнее обстоит дело с определением приращения коэффициента момента
рыскания, выражение для которого можно представить в следующем виде
Лпк- ' -ГТ7 + Лт-(АР)’
где
А Р— Рраб” Р«тк»
Рраб — тяга работающего двигателя,
РтК 1яга отказавшего двигателя, www.vokb-la.spb.ru
173
Д п1уяо(ДР)~,г коэффициент момента рыскания, создаваемый вертикальным
оперением за счёт эжекции воздуха струей работающего двигателя.
Величина ДтУви(ДР) зависит от взаимного расположения струи ц
вертикального оперения и от коэффициента нагрузки на винт В, и в настоящее
время нет удовлетворительной расчетной меюдики сё оценки. Вместе с тем момент
Дт¥(ю(ДР) действует в ту же сторону, что и момент рыскания, создаваемый
непосредственно силой тяги, и может быть значительным. Поэтому при проведении
в аэродинамической грубс указанных выше испытаний самолёта или его модели с
имитаторами двигателей должны быть предусмотрены испытания с одним
*'огка1авшим” двигателем, причем, необходимо располагать аэродинамическими
характеристиками при отказавшем левом и при отказавшем правом двигателе.
Согласно требованиям авиационных правил АП-23 (§ 23.149) необходимо
предусмотреть два режима дгхя винта неработающего двигателя:
1) винт авторотирует,
2) винт находится в положении, наиболее вероятном для данной конструкции
управления винтом, или зафлюгирован, если на самолёте имеется автоматический
механизм флюгирования,
Тяга работающего имитатора двигателя должна соответствовать режиму
взлётной или располагаемой максимальной мощности.
6.4.3 Влияние освобождения рулей на аэродинамические характеристики самолёта
На самолёте с ручной (безбустерной) системой управления освобождение
рычага продольного управления (ручки, штурвальной колонки) или рычага
путевого управления (педалей) приводит к тому, что связанный с этим рычагом
руль устанавливается относительно потока таким образом, чтобы его собственный
шарнирный момент был равен нулю. Это приводит к изменению аэродинамических
характеристик самолёта по сравнению со случаем фиксированных рулей, что
необходимо учитывать при расчётах характеристик устойчивости и управляемости.
Влияние свободного руля высоты на аэродинамические характеристики
самолёта можно оценить, исходя из следующих соотношений (для самолетов
обычной схемы):
Лтш„ = д5в + т“™-Дак, = 0.
А т, : т'г Аа + т?! • ® / + т“ • а + mz' Дбв,
Д «го = (1 ~ £“)Да + 57,3 • Lro + 573 еа Lro * “
В соответствии с этими соотношениями приращение коэффициента момента
тангажа самолёта с освобожденным рулем высоты при изменении угла атаки и
угловой скорости тангажа будет равно (принимается, что с?» ~0)
A mZc = с“ Да + + m£. • а,
где
= n# - AXFc,
id”™
- ni?1 - 57,3 Lro m?» ,
т _ m“ro
mX = niz - 57,3 Lro e“ mz* ,
m?
174
Величина ni^ называется запасом продольной статической устойчивости
самолёта со свободным рулем высоты; величина Д х,_ представляет собой
смещение аэродинамического фокуса самолёта за счёт освобождения руля высоты.
Так как обычно величины ni^B° и отрицательны, то у самолётов
обычной схемы (ш®в < 0) освобождение руля высоты приводит к смещению
аэродинамического фокуса вперёд (ЛХК < 0) и, соответственно, к уменьшению
запаса продольной статической устойчивости самолёта (Am^=m^-m?> 0)- У
самолётов схемы "утка”, наоборот, ш®в>0, и освобождение руля высоты на
переднем горизонтальном оперении приводит к смещению аэродинамического
фокуса назад (ДхР > 0), т.е. к увеличению запаса продольной статической
устойчивости (Ащ^ < 0)-
Без принятия специальных мер освобождение руля высоты приводит к
заметному уменьшению запаса продольной статической устойчивости самолётов
нормальной схемы (до Л т£у = 0,05 -г 0,09). Основным средством уменьшения
этого влияния является использование роговой компенсации руля высоты.
Увеличение степени роговой компенсации приводит к уменьшению
абсолютной величины производной .
При уменьшении степени осевой компенсации руля обычно соотношение
т“го
1ПШВ г,
производных —z-=- меняется незначительно. Рекомендуется так скомпоновать рули
™ШВВ
высоты, чтобы отношение производных не превышало 0,25, для чего обычно
т1Дв
необходимо применить роговую компенсацию руля с относигельной площадью
SpK = 0,05 -н 0,07.
Величины п)“7 и т“ представляют собой коэффициенты демпфирующих
продольных моментов самолёта со свободным рулем высоты. Для самолёта
обычной схемы (и схемы “утка”) освобождение руля высоты приводит к
ухудшению продольного демпфирования самолёта.
Смещение аэродинамического фокуса и изменение А продольного
демпфирующего момента при освобождении руля высоты приводят к изменению
такой важной характеристики самолёта, как степень продольной статической
устойчивости по перегрузке. Степень статической устойчивости по перегрузке
самолёта с освобожденным рулем высоты определяется соотношением
°пс = А°пс’
где
Л°пс = - 8, - 0 - £ ) ' 57>3 U — -т; •
Ш ш, Су И Шщ|1
Освобождение руля направления влияет, главным образом, на путевую
статическую устойчивость и демпфирование рыскания. Это влияние можно
оценить, используя следующие соотношения
АШшн = ШшнЛбн + 1Вшм Д Рво - 0
www.vokb-la.spb.ru
175
' Amy - niyДР <• mp(ov f m?"Л5„,
Л₽» = (|-о’)лЭ + 114Лй,й,.
где о - боковой скос потока у вертикального оперения.
В соответствии с этими соотношениями изменение запаса путевой
статической устойчивости (AniS ) и демпфирования рыскания (Лш'М
определяется формулами
ГПРво
тшя
тр“
Лт^ = -Н4,6игаьк^.
"Ч
Боковой скос потока в районе вертикального оперения из-за малых несущих
свойств фюзеляжа (по углу р) обычно нс превышает величин с/ = 0,05 0,1.
Потери запаса пугевой статической устойчивости при освобождении руля
направления для лёгких самолётов могут достигать AmJ = 0,0005, и их необходимо
учитывать, особенно, если при фиксированном руле направления самолёт обладает
сравнительно небольшой пугевой статической устойчивостью.
6.4.4 Формулы для пересчёта коэффициента продольного момента
на другую центровку
Рис.6.35
На рис. 6.35 хорда контрольного сечения крыла,
относительно которой производится замер углов атаки
а и относительно которой определяется положение
центра масс (в осях Xq и Yo) обозначена через АВ,
01 —исходное положение центра масс,
определяемое координатами X 'т и Y' г 5
О2 — другое положение центра масс,
определяемое координатами Х"т и Y"ri
Ya и Ха — соответственно подъемная сила и
аэродинамическое сопротивление самолёта при
данном угле атаки а.
Плечо силы Ya относительно О2 равно (Х"г - X't)C0S(X + (Y"T“ Y'r)sina, а
плечо силы Ха относительно О2 равно (Y"t - Y’i)cosa- (Х”т - X'T)sina.
Если M'z ” момент тангажа при положении центра масс в Оь a M"z ~
момент тангажа при положении центра масс в О2, то
М% - М', + Ya[(X"T - X'T)cosa + (Y"T - Y'T)sina] -
- Xa[(Y"T - Y'T)cosa - (X" i - X'T)sina]
или m"z = m'7 т X X T cosa + sinaJ _
Y"T-Y'rr
----------|^cXl cos a - cy> sin a
Так как cy -сУл cos a + cXi sin a и cx=cxcosa - c^sina, где cy и cx "
коэффициенты аэродинамических сил в связанной системе координат, т°
выражение для m"z можно представить в виде
176
, X''i-Х'! Y"-, - Y'-J
m z = in 7 +---------cv-----------cx
b b
или
Jiiz (x7.) = m7(x, J + (xTj ~ XT1)Cy - (Yj2 - YГ|)cx •
Напомним, что здесь коэффициенты су и сх даны в связанных осях. Обычно
р практике коэффициент inz рассчитывается или определяется при испытаниях
модели самолета в АДТ при заданном конструктором положении центра масс по
высоте, которое для лёгких самолётов, как правило, не меняется при изменении
загрузки или режима полёта.
Другое дело — положение цешра масс по продольной оси X, которое может
заметно изменяться по вариантам загрузки самолёта и по мере выработки топлива.
Это изменение задается конструктором как эксплуатационный диапазон центровок
самолёта Д Хтэ ~ X — Хтпп
В этом случае (YT = const) пересчёт коэффициента на другую центровку
производится по формуле
4v(xriPm,(xT1)<-(x„-Xr,)c>-
6.4.5 Моделирование динамики самолёта на пилотажных стендах
Пилотажный стенд представляет собой комплекс устройств, предназначенных
для моделирования (имитации) динамики полёта самолёта и включает в себя:
пилотажную кабину с приборами и рычагами управления, систему визуализации,
систему перемещения пилотажной кабины и пристендовый вычислитель.
Пристендовый вычислитель является основой пилотажного стенда: на нем
проводится математическое моделирование аэродинамики и динамики самолета, в
него введены характеристики системы управления и двигательной установки.
Кроме того, пристендовый вычислитель обеспечивает по специальным программам
работу' систем визуализации и систем перемещения кабины пилотажного стенда, он
накапливает и обрабатывает информацию в процессе эксперимента.
Входными сигналами для математического моделирования динамики
самолёта являются сигналы отклонения лётчиком рычагов и включение кнопок
управления в кабине (штурвал, педали, рычаги управления двигателями и
механизацией крыла, кнопки управления триммерами и т.п.).
Выходными сигналами являются параметры движения самолёта и
координаты его углового положения относительно вектора скорости и относительно
земли (скорость, высота, углы атаки и скольжения, углы тангажа и крена, удаление
и боковое смещение и т.п.). Эти сигналы передаются на приборы и индикаторы в
кабине, они являются управляющими сигналами для систем визуализации и систем
перемещения кабины пилотажного стенда.
Исследования на пилотажном стенде относятся к методам полунатурного
моделирования динамики полёта, так как они основаны на математических
моделях аэродинамики и динамики самолёта, а сам процесс управления лётчиком
является наиболее приближенным к натурным условиям полёта. Кроме того,
пилотажный стенд может иметь в своем составе ряд натурных элементов и систем,
например, систему управления самолёта.
Аналитические методы позволяют рассчитать характеристики устойчивости и
управляемости самолёта. Однако, они могут дать оценку приемлемости лишь тех
характеристик, для которых в нормативных документах имеются конкретные
численные требования. www.vokb-la.spb.ru
177
В тоже время дать качественную оценку характеристикам зстоичивосш ц
управляемости, а также ответить на вопрос о возможности завершения полета в
аварийной ситуации можно только в полете или при эксперименте на пилотажном
стенде
Сюда относятся также вопросы о приемлемости малых усилии на рычагах
управления, характерных для легких самолетов, проблемы обеспечения
безопасности при огкатах в системе управления и при остановке двигателя, полет в
условиях обледенения и др
Пилотажные стенды в настоящее время широко используются при создании
практически всех самолетов, позволяя отработать аэродинамическую компоновку
самолета и его систему управления уже на первоначальной стадии его разработки
Эю позволяет сократить сроки, а следовательно, и стоимость создания самолета
На пилотажном стенде есть возможность проводить исследования на
отказных или аварийных режимах (отказ двигателя и системы управления, выход на
сваливание, вывод из штопора и тд) без каких-либо проблем по безопасности
полета
' Особенно часто используют пилотажные стенды для изучения особенностей
характеристик устойчивости и управляемости самолетов при разработке новых
систем управления и новых методов управления, а также при отработке
нетрадиционных аэродинамических компоновок (тритан, летающее крыло,
самолеты на воздушной подушке и др), что достаточно часто встречается в
авиации общего назначения
На пилотажных стендах можно решать задачи по выбору оптимальных
характеристик системы управления, например, чувствительности управления и
загрузки рычагов Для этого на пилотажном стенде необходимо обеспечить
реальную (как на самолете) загрузку штурвала и педалей, обусловленную
шарнирными моментами ручей и скоростью полета
При разработке самолета важно получить его хорошие четно-технические
характеристики и высокую экономичность, однако для пассажирских самолетов
первостепенными являются вопросы безопасности полета
Определенной гарантией достижения необходимого уровня безопасности
полета явшется вы по 1нение требований норм летной годности или авиационных
правил АП-23 (FAR-23)
Многие из э1их требовании являются качественными, когда необходимо
получить приемлемую оценку летчика, например, требование по продольной
перебалансировке самолета при выпуске-уборке механизации и при изменении
режима работы двигателя Выполнение таких требовании можно проверить на
пилотажном стенде
Еще один пример из АП-23 касается требования по обеспечению посадки
самолета при разъединении основной проводки управления рулем высоты Это
требование выполняется или дублированием основной проводки управления или,
чаще всего, путем использования управляемого триммера на руле высоты,
кинематика и скорость перекладки которого обеспечивают пилотирование и
посадку самолета Возможность посадки самолета при управлении триммером руля
высоты можно проверить на пилотажном стенде
Есть и другие вопросы сертификации самолета, которые могут быть решены
моделированием динамики самолета на пилотажном стенде
Большую роль играют пилотажные стенды и при подготовке первых полетов
самолета Изучение особенностей характеристик устойчивости и управляемости
новых построенных самолетов, тренаж летчиков, особенно для внештатной
ситуации существенно повышают безопасность первых полетов
Практика создания самолетов показала, что взаимодополняющее стендовое и
полетное (на летающих лабораториях) моделирование является в настоящее время
178
самым эффективным средством лополетнои отработки характеристик устойчивое!и
и управляемости самолетов, уменьшая сроки и затраты на их разработку
В ЦАГИ создан ряд пилотажных стендов, которые используются для
отработки систем управления и исследования характеристик устойчивости и
управляемости нов! ix самолетов
На рис 6 36 показ тн внешний вид 6-степенною подвижно! о пилотажного
стенда
На рис 6 37 и 6 38 показан внешний вид и интерьер чстырехстепенною
подвижною пилотажного стенда
На рис 6 39 и 6 40 показан интерьер и вид из кабины неподвижного
пилотажного стенда
Все стенды оборудованы следящими системами загрузки рычагов управления
позволяющими моделировать аэродинамические шарнирные моменты при
изменении условии полета (переменные величины а, 0, 5, V и Н)
179
6 4 5 1 Характеристики шито годных стентов НА! И для неманевренных самолетов и
самолетов авиации общего назначения
Пилотажным стенд с подвижной кабиной ПСП К 102
Дата ввода в эксплуатацию 1982г
Дата модернизации 1994г
Назначение Пилотажный стенд с подвижной кабиной ПСПК-102
предназначен для моделирования полета малочапевренных самолетов,
гиперзвуковых летательных аппаратов, а также самолетов авиации общего
назначения с целью исследования динамики, устойчивости и управляемости и
тренировки летного состава
Основные характеристики
Кабина летчика
двухместная, с ишерьером и приборным оснащением ВКС 'Буран' на базе
двух цветных дисплеев с возможностью установки других приборов и индикаторов
Рычаги управления
сменные с электрогидравлическими системами загрузки (центральная ручка,
штурвал, боковая ручка), педали другие рычаги и кнопки
Имитатор визуальной обстановки
одноканальныи с оптическим коллиматором, с гибридным аналого-
цифровым синтезом цветного изображения земной поверхности и зоны ВПП
Система подвижности кабин
6 степенная, опорного типа с максимальными перемещениями
— по высоте ±1 2м, в продольном и боковом направлениях ±1,5 м,
— по крену ±30°, по тангажу +40°, по курсу *60°
Пристендовый вычислительный комплекс
— локальная сеть из 5 персональных компьютеров IBM PC,
- устройство сопряжения по 64 каналу НАЛ, АЦП и дискретного ввода-
вывода
Пилотажный стенд с подвижной кабиной ПСПК-3
Дата ввода в эксплуатацию 1976 г
Дата модернизации 1995г
Назначение Пилотажный стенд с подвижной кабиной ПСПК-3
предназначен для моделирования полета неманевренных летательных аппаратов на
основных режимах полета (взлет и посадка, крейсерские режимы полета и т п) с
целью исследования пилотажных характеристик и тренировки летного состава
Основные характеристики
Кабина летчика
одноместная, оборудованная основными пилотажно-навигационными
приборами
Рычаги управления
- штурвал (или центральная ручка) и педали, с электрогидравлическими
системами загрузки
Имитаторы визуальном обстановки с проекцией на цилиндрическим экран
радиусом 2,2 м
— широкоугольная теневая система с углами обзора 180’ по горизонту,
— система с электронным синтезом изображения размером 2 м х 1,5 м
180
Система подвижности кабины
- 4 х степенная, консольного типа с перемещениями
но высоте ±0,8 м,
крену, тангажа и рысканию ±15°
Приысндовыи вычислительный комплекс
локальная сел» ит 3 персональных компьютеров IBM PC
6 4 6 Перечень материалов, представляемых в ЦАГИ для составления
"Заключения на первые полеты легкого пассажирского самолета”
1 Схема самолета (общий вид) Основные размеры Тип механизации
Профили крыта и оперения Органы управления
2 Назначение самолета, его катсюрия по АП-23 Тактико-технические
требования Базирование Веса, центровки, моменты инерции Области режимов
полета Основные ограничения (Сг1ГЛЧ Hnnx, Vmax VCB, Путак и др )
3 Огчегы по испытаниям моделей самолета в аэродинамических трубах
4 Аэродинамическим расчет самолета Влияние обдува от винтов Влияние
экрана Расчет летно-технических и взлетно-посадочных характеристик
5 Расчет характеристик устойчивости и управляемости Оценка достаточных
размеров ГО и ВО Предо тьндя и боковая балансировки Статически^ и
динамические характеристики Быстродействие по крену Отказ двигатетя (для
двухдвигательного самолета) Усилия на рычагах управления Усилия нт ручке
(штурвале) при выходе на Пупих
6 Система управления (8тах, Кш) Схема системы Сведения о рычагах
управтения и триммерах Реальные характеристики системы снятые с елмоьегь
бв(Хв) 6ДХЭ) 5Н(Х„) Люфты, трение
7 Шарнирные моменты органов управления Сведения о компенсациях р\чеи
(SpK Sok )
8 Данные по винтомоторном группе Тип двигатетя и винта Зависимости
тяги по скорости, высоте и режиму работы
9 Таблица соответствия летных характеристик и характеристик устойчивости
и управляемости требованиям АП-23
www. vokb-la. spb.ru
181
VII. ОБЕСПЕЧЕНИЕ ПРОЧНОСТИ КОНСТРУКЦИИ ПЛАНЕРА И
ВЕСОВОЙ ЭФФЕКТИВНОСТИ САМОЛЁТОВ АОН НА ЭТАПЕ
ПРОЕКТИРОВАНИЯ
При проектировании самолета возникает необходимость решить задачу
обеспечения прочности конструкции при се высокой весовой эффективности.
Решение задачи прочности сводится на этом этапе к необходимости выбрать
конструктивно-силовую схему планера самолета, которая бы обеспечивала:
- статическую прочность конструкции при экстремальных нагрузках во всех
расчетных условиях в соответствии с требованиями нормативных
документов,
- усталостную прочность конструкции с соответствующим коэффициентом
надежности;
- живучесть конструкции при наличии нормированных повреждений;
- требование выполнения безопасности от явлений аэроупругости;
- высокую весовую эффективность.
Кроме того, необходимо учитывать требования ремонтно- и контролепригод-
ности, вопросы технологичности, вопросы, связанные с компоновкой самолета ,
включающие и его специализацию (например, сельскохозяйственный самолет)
и т.д.
Вся перечисленная выше противоречивая совокупность требований должна
быть увязана наилучшим образом в конструкции.
Для обеспечения прочности конструкции должны быть сформированы в
соответствии с требованиями авиационных правил для легких самолетов АП-23
расчетные условия прочности, включая расчетные условия по перегрузкам в центре
тяжести , по распределению нагрузок, по расчетным скоростям, расчетным весам и
центровкам.
Эти расчетные условия являются входной информацией для определения
конструктивно-силовой схемы. Легкие самолеты общего назначения представляют
собой довольно широкий класс самолетов, отличающихся различными
компоновочными решениями, расположением и типом двигателей, положением и
формой крыла , типами фюзеляжа, расположением и типом шасси и хвостового
оперения. Все это накладывает определенный отпечаток на выбор конструктивно-
силовой схемы самолета. Конструктивно-силовая схема значительно влияет на
весовую эффективность. Масса конструкции может быть разделена на силовую,
которая определяется внешними нагрузками, и несиловую, которая зависит, в
основном, от технологии сборки и других особенностей производства. На
начальном этапе проектирования необходимо в целях весового анализа достаточно
точно определять массу конструкции в функции от параметров самолета. Масса
конструкции ш кон состоит из следующих компонент :
m кон = m кр + m ф + иь оп + m [И
где:
m кр - масса крыла,
m ф - масса фюзеляжа,
m ои - масса оперения,
m ш - масса шасси.
Если мы имеем свободнонесущее (без подкосов) крыло легкого самолета, то
масса крыла может быть рассчитана по одной из следующих формул [1].
182
Формула Зинина:
ткр = 16,4 1О'екМ8Х ф np 1 +2S
О со Т]
Формула Фомина :
*“«• = 16,4 Ю <р npl„0^s[)-3— 3±1 ----SL--
Формула Лебедева:
,1\-р
с U1-5 n₽mo^S n + 2 f
5 10 ф—-----j---- - — 1
c0 cos X Л + к
—’1 + 2S
л + з;
Формула Горенбика [2]
Г 1 38 V /
ткр = 4,68-10^1 +J [пр(тр
0,8т’кр)]°’
)55 £1,675
70,45
Формула Бадягина:
.1 т-41 1 1 moajS 7]+ 4
ткр - 1,1 10 кмех ккон к„ ф np ц + 1
И Т.Д,
В этих формулах:
т !ф - масса крыла, включая подфюзеляжную часть, но без учета массы
герметизации баков-отсеков (кг),
ш р - масса самолета без топлива (кг),
т’кр - масса крыла первого приближения (кг),
fj - размах закрылка (м),
пр - расчетная перегрузка,
S, S. - площади крыла и закрылка(м2), ц - С--;
ск
Cj - средняя относительная толщина закрылка;
Vjp - расчетная скорость для закрылков (км/час),
- наибольший угол отклонения закрылков (в градусах),
кМех - коэффициент, учитывающий тип и наличие механизации на крыле;
kwcx =0,9 - механизация отсутствует;
к«ех =1,0 - наличие щитков, однощелевых закрылков;
кМех =1,15 - наличие закрылков Фаулера и предкрылков;
ккон ’ коэффициент, учитывающий тип конструкции:
ккоц =0,9 - монолитные и сотовые конструкции,
кКОн =1 - в случае применения клепаной конструкции,
ksrT - коэффициент, учитывающий тип материала:
кмт = 1,0 в случае применения в основной конструкции Д16
к5ГТ = 1,2 в случае применения АМГ-6 (гидросамолеты),
ки,н = 0,8^0,85, если в силовых элементах конструкции используются
композиты,
6 - коэффициент, учитывающий эффективность работы продольных силовых
элементов:
0 = 1,0- для однолонжеронного, трехлонжеронного и кессонного крыла,
0 = 0,9 - для двухлонжеронного крыла, www.vokb-la.spb.ru
183
Ф - коэффициент разгрузки, который можно определить следующим образом.
(Р = 0,93 - 0,014 ксг - 6,3 - 10~’кш mT KP(zT кр)2,
где
ксу= 1,0 - если двигатели расположены на крыле;
ксу “0 - если двигатели не расположены на крыле,
кш = 1,0 - если основные стойки шасси установлены на крыле,
к1П =0 - если стойки нс связны с крылом,
— тткр
п>г кр = “ относительная масса топлива в крыле,
Z.Tp
zT кр = ~~t~ - относительная наибольшая координата топлива в крыле.
/7
Если рассмотреть распределение массы крыла самолета АОН, то получается
примерно следующее:
- силовая и несиловая обшивки 35-40%,
- лонжероны 23-28%,
- стрингеры 4-8%,
- нервюры 8-10%,
- узлы, стыки 3-4%,
- механизация 10-15%,
- крепеж и прочее 4-6%
0.35рЛ
1000 J
+ 9тахтах^
1000 J
Масса закрылков и элеронов, может быть определена как:
ш3 = Яд S3
тэ = Sj
где Qj, Оэ - масса квадратного метра закрылков и элеронов, которая вычисляется по
следующим формулам:
Ч3 = к(4 +
q, = к^4,5
Здесь р, - нагрузка на закрылок изменяется в пределах от 400 до
* 1000 дан/м2,
к3= 1,0 - однощелевые шарнирные закрылки;
к3 =1,3 - однощелевые закрылки Фаулера,
к3 =1,5 - двухщелевые закрылки Фаулера,
к3 =1,45 - коэффициент, учитывающий наличие балансировочных ухтов:
Qmax max - предельный скоростной напор, дан/м2.
Для расчета массы однобалочного фюзеляжа легких самолетов можно
воспользоваться следующими формулами.
Формула Хоуви.
П1Ф = k. V, [1,85 + Lro (ьф + Ьф)]еР ,
где
Vn - расчетная скорость пикирования, м/с,
L го -плечо горизонтального оперения относительно центра масс
самолета, м,
Еф - боковая поверхность фюзеляжа, м2,
к - 0,086 - если то < 6000 кг,
к = 0,078 - если то = 6000 - 10000 кг.
184
формула Калягина
Шф = 1,14кс>(| + 0,4р„Л)«^ mJ" или Шф = Чфрф, где
Чф = кф mJ25 и„ф(| +0,410-2Vm> )(1 + ОЛРкф) + US <1„,
Еф— ^,6 ф ^ф ЭКВ
Здесь k^y-l.O - если двигатели расположены не на фюзеляже,
ксУ =1,14 - если двигатели находятся на фюзеляже,
Ризб “ избыточное давление в гермокабине на наибольшей эксплуатационной
высоте полега в дан/см2;
кф = 0,08 - если двигатели на крыле,
кф = 0,096 - если двигатели на фюзеляже
Соотношение между элементами конструкции фюзеляжа примерно
следующее.
- обшивка 26-30%
- стрингеры и лонжероны 12-15%
- шпангоуты 20-22%
- пол 6-9%
- фонарь 10-12%
- окна 3-5%
- двери-трапы, люки 6-8%
- перегородки, соединения, багажник, герметизация, крепеж 7 9%
Для оперения можно воспользоваться следующими формулами:
m„=72S]i2[o,4 + (v<p +113) 935]
m„ =6^S“[o,4+(v,p |ПЗ)|1ОО]
Здесь \ Кр в км/час или возможно использовать формулу Бадягина
ш011 - шго + mBO = qon SO1I, где qcn = kvkn(4,4 + 0,8 Ю’3 т0)
Коэффициент kv учитывает маневренность самолета Если самолет
неманевренный kv=l,0, для маневренных самолетов kv=l,5
Распределение массы оперения легких самолетов по элементам такое'
- лонжероны и стрингеры
- обшивка
- нервюры
- узлы крепления
- закониовки, балансиры, триммеры, крепеж
Масса шасси определяется как
тш - т,,. т(), где
= k„„ ко6г (6h ш п + 11,3)10-э +
35-38%
40-44%
7-9%
4-6 %
10-12%
Gkoh %
+ 0,0625кш 7рш „ /(1 + рш „,) + 0,005
Здесь
кКОН ~1 _ если основные опоры из стали
средней прочности,
ккон =0,65 - если опоры из материла
высокой прочности,
Ki6r =1,05 - если на колесах есть обтекатели,
КРЫЛО
2000 2100 2190 2500 Go
Рис.7.1
www.vokb-la.spb.ru
185
G^r« ФЮЗЕЛЯЖ
2000 2100 2190 2500 Go
Рис. 7.2
GKOtl. % ОПЕРЕНИЕ
2000 2100 2190 2500 Q)
k,,^!1,2 - если обтекатели для шасси на
фюзеляже,
кш==1,0 - для пневматикой с вкладной
камерой;
к,„=0.93 - для бескамерных нневматиков;
Рш гл * давление в шинах основных колее;
Ьш гл " Длина главной опоры шасси.
Написанные выше формулы не исчерпывают
всех подходов к определению массы конструкции
на начальном этапе проектирования. Кроме того,
эти формулы обладают некоторой областью
применимости. Чтобы быть уверенным в
правильности определения массы конструкции,
необходимо развивать и применять методы расчета,
основанные на физических моделях конструкции и
се элементов.
Используются весовые формулы с учетом
некоторой коррекции, например, масса агрегата
рассчитывается по всевозможным формулам, и
проводится осреднение с некоторыми весами,
2000 2100 2190 2500 Go
Рис. 7.4
Окон. * ПЛАНЕР
2000 2100 2190 2500 Go
Рис. 7.5
вводимыми на основе предварительного анализа.
Пример расчета агрегатов самолетов АОН показан
на рис. 7.14-7.5. Имеются соответствующие
программы, реализующие идеологию определения
веса конструкции.
Существует и разработан также следующий
подход по определению массы конструкций.
Как уже было сказано, массы конструкции
самолета слагаются из двух основных частей’
- массы силовой конструкции, то есть, той ее
части, которая воспринимает, перераспределяет и
уравновешивает основные внешние нагрузки,
действующие на самолет;
- массы дополнительных конструктивных
элементов, которые или выполняют различные
вспомогательные функции (передача местных
нагрузок, соединение основных силовых
элементов), или являются несиловыми элементами.
Прочностному расчету подлежат, как
правило, только элементы силовой конструкции.
Масса дополнительных конструктивных элементов
определяется, зачастую, конструктивными
соображениями.
Силовая конструкция должна удовлетворять
требованиям статической прочности,
аэроупругости, выносливости, ресурса и, наконец, живучести. Совершенство
силовой конструкции определяется теми конструкторскими идеями, которые
использованы при выборе конструктивно-силовой схемы, возможностями методик
расчетных и экспериментальных исследований, а также глубиной и тщательностью
этих исследований.
Масса дополнительных конструктивных элементов определяется, прежде
Всего, уровнем технологии, требованиями эксплуатации, транспортировки и г.п.
186
Как на массу основной силовой конструкции, так и на 'массу
дополнительных элементов существенное влияние оказывают механические и
физические характеристики используемых конструкционных материалов.
Задачу об определении напряженно-деформированного состояния
Конс1рукции, параметры которой заданы, будем называть прямой задачей. Задача
оптимизации конструкции относится к классу обратных задач, т.е. таких, в когорых
парамефы конструкции определяются в соогветствии с тем или иным заданным
критерием выбора, математически представленным в виде критериальной функции
или функционала. Внешние нагрузки при этом могут быть функциями искомых
параметров консгрукции. Естественно, что подобные задачи существенно сложнее,
поскольку они включают в себя как решение прямой задачи, так и
целенаправленный поиск оптимальных параметров силовой конструкции .
Всякая консфукция может быть описана совокупностью геометрических
параметров, механических и физических свойств используемых материалов,
тополо< ической схемой, то есть схемой взаимосвязи отдельных элементов
конструкции, и т.д. Многообразие этих величин, описывающих конструкцию,
образует многомерное пространство проектных параметров. Если конструкция
определяется совокупностью функций, то рассматривается соответствующее
функциональное пространство. Следует сказать, что не все координатные
направления в этом пространстве равноценны. Геометрические параметры
(площади, толщины, моменты инерции) являются одними из простейших.
Характеристики материалов вследствие дискретности их задания, а также
вследствие больших трудностей описания механических свойств материалов,
относятся к категории весьма сложных переменных. То же можно сказать и о
тополотческой схеме (для общего случая), хотя в некоторых случаях ее можно
задать координатами в эвклидовом пространстве узлов элементов конструкции.
В зависимости от класса допустимых конструкций и заданного критерия
оптимальности задачу оптимального проектирования конструкции условно можно
классифицировать следующим образом:
1) синтез оптимальной конструктивно-силовой схемы;
2) оптимизация распределения материала в пределах заданной силовой
схемы;
3) оптимизация элементов конструкции.
Задача выбора рациональной конструктивно-силовой схемы не может быть в
настоящее время сведена в единой логической и вычислительной процедуре,
которая наверняка бы приводила к единственному наилучшему решению.
Выбор КСС относится к задачам синтеза, в которых из зачастую
разрозненных результатов и, представленного в самой различной форме
конкретного опыта необходимо создать конструкцию, обладающую необходимыми
или даже лучшими качествами. В задачах синтеза трудно предложить такую
постановку, которая сводила бы все трудности решения этой проблемы к
математическим. Однако, несмотря на указанные трудности, применение
аналитических методов в выборе КСС существенно расширяет возможности
проектирования.
В задаче выбора рациональной конструктивно-силовой схемы исходными
являются следующие данные:
-известные действующие нагрузки (или их спектр), места их приложения и
общие требования к эффективным жесткостям;
-внешние геометрические формы, в которые должна вписываться
конструкция;
-дополнительные условия, связанные
эксплуатационными требованиями.
с технологическими и
www. vokb-la. spb.ru
187
к последней Ipvnne 1ре6овании можно oiнести зафиксированные месщ
необходимых разьемов, связанные с технологическими и эксплуатационными
соображениями, формулирование необходимых условий для обеспечения
безопасного разрушения и повышенной живучести конструкции при повреждениях
В задаче оптимизации конструкции в пределах заданной силовой схемы класс
допустимых конструкций определяется путем варьирования параме ipcui,
характеризующих распределение материала в заданной схеме с заданным типом
элементов (панелей). С точки зрения конструктора-проектировщика подобная
задача может быть широко использована в практике оптимального проектирования,
поскольку часто силовая схема определяется на основании компоновочных либо
гехноло! ических соображений. Например, задача оптимизации распределения
силового материала в крыле, когда внешняя геометрия кессона (ширина, высота)
уже задана, и требуется определить распределение силового материала с точки
зрения того или иного критерия.
Оптимизацию параметров самих элементов конструкции (панелей) выделяют
в отдельный класс задач с целью значительного уменьшения числа неизвестных,
определяющих конструкцию, и, кроме того, в связи со спецификой описания
поведения элементов конструкции.
Действительно, при решении задачи оптимизации конструкции в заданной
силовой схеме на каждом шаге итеративного процесса определяются внутренние
'усилия и исследуются напряжения, действующие в каждой точке конструкции, для
элементов конструкции, работающих на сжатие, уровень допустимых (критических
напряжений) зависит от параметров самой панели, поэтому каждой комбинации
внутренних усилий, действующих на элемент конструкции, соответствует свое
допустимое напряжение и оптимальные параметры элемента конструкции То есть,
чтобы полностью решить задачу об оптимизации конструкции, необходимо на
каждом шаге итеративного процесса решить задачу оптимизации элемента
конструкции, что приводит к достаточно сложному алгоритму вычисления
В качестве критерия оптимальности в практике авиастроения, как правило,
используется критерий минимума массы силового материала, а остальные, порой
противоречивые требования, накладываются в виде ограничений типа равенств или
неравенств В качестве этих ограничений выступают требования прочности,
аэроупругости, ресурса, живучести, конструктивно- технологические ограничения и
т д. Критерии минимума веса находится в прямой зависимости от измерения
экономической эффективности, поэтому вследствие его явной зависимости от
исхотных параметров и возможности наиболее законченным образом поставить
задачу оптимизации, он получил большое распространение как интегральный
критерий технологического совершенства летательного аппарата
Кроме того, используются и другие критерии оптимизации, например,
критерии равнопрочности Исторически появился в задачах проектирования он
одним из первых. Идея равнопрочности заключается в требовании достичь в
каждой точке конструкции наиболее допускаемых напряжений. В случае, когда на
конструкцию действует несколько типов нагружения, критерий равнопрочности
формулируется следующим образом. Требуется, чтобы в каждой точке конструкции
хотя бы один раз достигался заданный уровень допускаемых напряжений. В
рассматриваемом критерии отсутствуют требования минимума массы. Ничего
нельзя сказать также и о полученной в результате оптимизации жесткости
конструкции. Только в ряде случаев (для статически определимых конструкций)
критерии равнопрочности является адекватным требованию минимума веса и
максимума жесткости при этом весе. Тем не менее, на начальной стадии
проектирования использование этого критерия весьма желательно в связи с
простотой вычислительного алгоритма.
188
Следующим критерием оптимизации силовом конструкции, 1акже досыючно
распространенным, является принцип минимума потенциальной энер1ии
деформации при постоянном объеме силовою материала. Впервые этот критерии
был сформулирован в работе 111 при следующих предположениях
- деформации упруги,
- внешняя нагрузка фиксирована,
- ynpyias среда однородна
В работе |1] показано, что упругая система, обладающая минимумом энергии
деформации при постоянной объеме материала, характеризуется постоянством
удельною потенциала В дальнейшем этот критерии был применен к расчету
реальных конструкций в работах |2], (3], |4], |5]
Итак, основная цель выбора конструктивно-силовой схемы заключается в
отыскании наиболее рациональных силовых схем планера. Например, возможно
использование крыла с подкосом (Як-112, ВСХС). Это позволяет уменьшиib массу
консолей за счет разнесения пары сил, создающих ияибающнй момент на
большую базу и за счет организации не моментной, а шарнирной заделки. Задача
выбора однолонжеронного крыла или многоложеронного, шарнирно-, возможно,
моментно-опирающегося на рамы фюзеляжа тоже является важной, и достаточно
- сложной.
Возможно решить такие задачи с помощью моделей метода конечных
элементов (МКЭ), но при этом необходимо в расчетной модели воспроизвести
разнообразное число конструктивно-силовых схем. Иногда удобно представить
конструкцию в виде ферменной, то есть в виде набора стержней, связанных между
собой шарнирами, и ставить задачу минимизации силовой массы m - 1|N, /
где и- число стержней; Nj - усилие в i-ом стержне - длина стержня.
Для сжатых стержней следует учесть возможность увеличения массы,
связанное с потерей устойчивости стержня:
где N*p- критическое усилие в стержне, а ц -коэффициент приведения длины
стержня
Поскольку J, = i, Fj, где i, - радиус инерции, a F, - площадь стержня,
хгкр n2Ei2F,
то N,p =------Li .
В безмоментных тонкостенных’ конструкциях силовая масса может быть
определена как.
п
п| где п - число элементов, F, -площадь элемента, толщина
элемента.
В общем виде m = o^dv, где dv - элементарный объем конструкции.
Особенностью конструкций планера легких самолетов является слабая
нагруженность элементов, низкий уровень критических усилий в обшивке, поэтому
возникает очень важная задача редуцирования обшивки при потере устойчивости и
задача задания уровня допускаемых напряжений. Уровень допускаемых
напряжений зависит как от свойств применяемых материалов, от геометрических
характеристик панелей, так и от требований ресурса.
Особенностью полетов легких самолетов является полет в зоне малых высот с
повышенным уровнем атмосферной турбулентности, поэтому для данного клаюеагокЬ-la.spb.ru
189
самолетов вопрос об определении итегральной повторяемости iiaipvJOK являеюя
весьма важным, следовательно, необходим надежный прогноз повторяемости этих
нагрузок с помощью расчета или пересчета с прототипа с целью оценки
характеристик усталостной прочности и живучести.
Особое внимание должно быть уделено обеспечению принципов
безопасное!и разрушения конструкции в местах конструктивных узлов навески
шасси, механизации, двигателя, оперения и т.д. При этом должна быть решена
проблема контролепригодности конструкции. В особенности это необходимо, если
для целей повышения весовой эффективности применяются композиционные
материалы (КМ). Например, однолонжеронная конструкция крыла, выполненная
из КМ, требует необходимости обеспечения живучести лонжерона при наличии
повреждения.
Для целей обеспечения прочности на всех этапах создания самолета
формулируется комплексный план, объединяющий всю совокупность прочностных
дисциплин, который определяет необходимый объем расчетно-экспериментальных
исследований для отработки прочности конструкции. К легким самолетам это
применимо в той же мере. Однако, учитывая особенности конструкции легких
самолетов, необходимый объем расчетно-экспериментальных исследований может
быть скорректирован. Основные этапы отработки прочности утверждены в J6J.
Основным принципом, по которому различаются нормативные требования
различных частей норм летной годности, является введение понятия категории
летательного аппарата. Нормативные требования АП-23 регламентируют нормы
летной годности для нормальной, многоцелевой, акробатической категорий
самолетов и категории самолетов местных авиалиний.
Разделение всего многообразия самолетов на категории связано, главным
образом, с предполагаемым использованием летательного аппарата, налагаемыми
эксплуатационными ограничениями и стоимостью процесса сертификации. Для
легких самолетов можно отметить следующие особенности гражданских
летательных аппаратов:
- область применения легких ("небольших" - по классификации FAR)
самолетов существенно ограничена по сравнению с тяжелыми
("большими") самолетами по используемому воздушному пространству, по
типам транспортируемых грузов и по количеству перевозимых пассажиров
и грузов;
- их целевое назначение практически не ограничено (в то время как целевое
назначение тяжелых самолетов ограничено, в основном, транспортными
операциями);
- поскольку стоимость проектирования и изготовления легких самолетов
относительно невысока, а оправданные затраты на сертификацию-должны
соответствовать затратам на проектирование и изготовление самолетов, то
это накладывает ограничения на методы установления соответствия
параметров конструкции требованиям нормативных документов. В связи с
вышеизложенным требования к прочности самолетов норм АП-23 (разделы
"С" и "D") имеют следующие основные особенности:
1. В большинстве случаев требования АП-23 представляют возможность
определения условий нагружения агрегатов и частей летательного аппарата
упрощенными способами. Однако, при переработке требований FAR-23, которые
были взяты за основу при создании АП-23, было принято во внимание то, что:
- развитие методов определения внешних нагрузок за последние 20 лет
позволяет использовать более совершенные подходы при определении
нагрузок,
- отечественными ОКБ были на хорошем уровне освоены современные
расчсзные методы определения нагрузок;
190
- прогресс в области -аэродинамики и проектирования JLA привел к тому, что
многие вновь создаваемые летательные аппараты обладают
нетрадиционной компоновочной схемой или другими существенными
особенностями, непозволяющими считать их самолетами "нормальной"
схемы и применять при их проектировании упрощенные методы
определения нагрузок, созданные ранее в предположении "нормальной"
схемы ЛЛ.
Поэтому, по сравнению с FAR-23 исключены совершенно грубые методы
определения нагрузок, пригодные только для самолетов “нормальной" компоновки
изъяты приложения к FAR-23 в части определения нагрузок, введены
контролируемые маневры для определения нагрузок на оперение, существенно
развита часть по определению гидродинамических нагрузок на корпуса и поплавки
гидросамолетов и т.д.
2 Уровень закладываемых нагрузок в нормативных требованиях АН-23, как
правило, выше, чтобы при упрощенных подходах обеспечить приемлемый уровень
безопасности. Кроме того, более высокий уровень нагрузок, закладываемый в
нормативных требованиях АП-23, обусловлен особенностями эксплуатации легких
самолетов: невысокой квалификацией летчиков, существенно более высокой
управляемостью, небольшой нагрузкой на крыло и т.д.
www. vokb-la. spb.
191
VBL ПОаНЕДОВАТШ1ЬНОСТЬ РАБОТ и основные
РЕКОМЕНДАЦИИ ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ОТ
ФЛАТТЕРА ЛЕГКИХ САМОЛЕТОВ ОБЩЕГО НАЗНАЧЕНИЯ
8.1 Общие положения
1. Флаттером называют незатухающие упругие колебания самолета
возникающие в полете, если скорость полета достигает некоторой определенной
величины Эти колебания порождаются взаимодействием упругих, инерционных и
аэродинамических сил и относятся к классу автоколебаний. Самолет может быть
подвержен разнообразным формам флаттера в зависимости от того, в какой части
конструкции возникают наиболее интенсивные колебания. Поэтому различают
флаттер крыла, оперения, элеронный, рулевой, триммерный и др
Опасность флаттера заключается в том, что возникающие при интенсивных
колебаниях динамические напряжения могут очень быстро достит ать разрушающих.
Поэтому возникновение флаттера любой формы на самолете недопуешмо
2. Основным критерием, характеризующим флаттер данного самолета,
является величина критической скорости флаттера VKp Критическои скоростью VKp
называется скорость полета, при достижении которой возникают незатухающие
упругие колебания самолета. При скорости полета V>VKp колебания нарастают, а
при V<VKp колебания затухают
Критическая скорость, определяемая геометрическими, инерционными и
упругими характеристиками самолета, является еще и функцией высоты полета.
Безопасность от флаттера должна быть установлена для всех возможных
режимов полета и различных вариантов полетного веса
Основным критерием безопасности от флаттера является соотношение
критической скорости флаттера и максимальной скорости полета самолета. За
такую скорость принимают так называемую предельную скорость Vtnax тях,
определяемую в соответствии с нормами прочности. Критическая скорость
флаттера должна превышать Vmax max не менее, чем в 1,20 раза (здесь под V
понимается индикаторная скорость).
Введение коэффициента 1,20 диктуется.
- опасностью полета на скорости, близкой к критической скорости флаттера;
- неизбежной погрешностью расчетов и испытаний;
- неизбежной погрешностью в определении расчетных данных самолета,
- возможной нестабильностью характеристик самолета в условиях серийного
производства ("разброс в серии");
возможным изменением характеристик самолета в процессе его
эксплуатации.
3 Необходимо, чтобы критическая скорость флаттера превышала предельную
скорость Vraax п,ах не только в исходном варианте, но и при некотором изменении
параметров самолета (жесткость, размещение масс, положение и способ крепления
двигателя, положение и способ крепления подкоса, степень весовой балансировки
органов управления и др.). Зависимость от параметров далеко не всегда монотонна,
изменение какого-либо параметра в одну и ту же сторону может в одних случаях
приводить к повышению критической скорости, а в других - к понижению ее.
192
Рис.8.1
Рис.8 2
Укр
Рис.8.4
Для каждой формы флаттера можно
указать два-три конструктивных параметра,
изменение которых существенно изменяет
величину критической скорости флаттера.
Эти характерные, "определяющие"
параметры различны лая различных форм
флаттера
Существует два осногных типа
зависимости критической скорости от
определяющего параметра. Один из нчх
типичен для безрулевого фтаттера
(см. рис.8.1 и рис.8.2, где параметрами
могут быть, например, жесткость крыла на
кручение и вес выносного балансира,
соответственно), а другой - для ру ывых
форм флаттера (см. рис 8 3 и рис 8 4 здес^
параметрами могут быть степень весовой
балансировки и парциальная частота
колебаний подвесного груза, соответ-
ственно).
Различное поведение этих кривых
диктует и различные способы обеспечения
безопасности от флаттера.
В тех случаях, когда имеет место
зависимость типа рис 8 1 или рис 8 2, те.
преимущественно в случаях безрулевых
форм флаттера, должны быть выдержаны
такие значения определяющих параметров,
при которых критическая скорость
флаттера в достаточной степени превышает
Vinax 1Пах (должен быть выдержан запас по
скорости полета).
В тех случаях, koi да имеет Wfr.MAkb-la.spb.ru
193
зависимость типа рис.8 3 или рис.8 4, должны бы и, выдержаны такие значен i<>
определяющих параметров, при которых фла1тер невозможен при любой скорое(и
полета (должен быть выдержан достаточный запас по параметру).
8.2 Основные рекомендации
1. При анализе безопасности от фпатгера целесообразно разбить все виды
флаттера на две основные группы
а) безрулевыс формы флаттера,
б) рулевые формы флаттера (флаттер с участием органов управления).
К первой группе относят все виды флаттера, в котором можно пренебречь
относительными перемещениями органов управления, т.е. считать, что руль
является как бы жесткой частью основной несущей поверхности (крыла,
стабилизатора, киля).
Ко в юрой группе относят те виды флаттера, в которых, наоборот, главную
роль шрают колебания орзанов управления (элерон, киль и др.).
Различают флаттер симметричный и флаттер антисимметричный. Внутри
каждой группы существует большое число различных форм флаттера,
отличающихся друг от друга как характером упругих деформаций и перемещений
'конструкции, так и величиной критической скорости и частот колебаний.
Во многих случаях каждой форме флаттера оказывается возможным
приписать название, которым показывается, какие именно упругие деформации и
перемещения конструкции (ее степени свободы) являются определяющими Так,
например, различают изгибно-крутильный флаттер крыла (крыло при колебаниях
изгибается и закручивается), изгибно-элеронный флаттер (изгибается крыло и
отклоняется элерон), и др..
2. Величина критической скорости флаттера определяется совокупностью
целого ряда конструктивных параметров самолета. Изменением их в нужную
сторону критическая скорость может быть повышена. Так, например, к увеличению
критической скорости (или даже к ее исчезновению, когда она становится
величиной мнимой) приводят:
Для изгибно-крутпильного флаттера
- одновременное увеличение всех жесткостей конструкции;
- увеличение жесткости крыла на кручение, т е. повышение частоты его
крутильных колебаний,
- перемещение вперед линии центров тяжести сечений крыла,
- уменьшение разноса масс по хорде, в особенности к концу крыла.
Для элеронного флаттера
- одновременное увеличение всех жесткостей конструкции;
- весовая балансировка элеронов;
- увеличение жесткости проводки управления (при котором, однако, не
происходит сближения частот собственных колебаний крыла и элерона на
проводке).
194
Для фюзеляжного флаттера (или флаттера хвостовых балок)
- одновременное увеличение всех жесткостей конструкции,
- вел имение жесткости на изгиб фюзеляжа (либо хвостовых балок),
Приводящие к повышению частоты его изгибных колебаний.
8.3 Перечень работ, необходимых для анализа флаттера
I. В отличие о г аппаратов других типов, для легких самолетов общею
применения допускается упрощенная процедура обеспечения безопасности от
флаттера, в которой не является обязашльным изготовление динамически подобной
модели Кроме того, существенно сокращены расчетные исследования, в частное!и,
допустимо применять самые простые расчетные схемы с квазистационарной
аэродинамикой, с минимальным числом степеней свободы и объемом
варьирования конструкционных параметров. Однако, при этом буду! более жесткие
требования к натурному эксперименту (частотные испытания, летные
исследования) и к величине основных параметров, таких как балансировка органов
управления, надежность систем и т.п.
2. Исследование флаттера самолета можно проводить, используя
теоретические методы и (или) экспериментальные. Эксперимент можно проводить
на натурной конструкции или на динамически подобных моделях. Каждый способ
исследования имеет свои преимущества и недостатки. Наиболее достоверные
данные получаются при комплексном подходе, когда теоретические результаты
находят подтверждение в эксперименте.
Хотя проектирование, изготовление и испытания динамически подобной
модели не являются обязательной частью работ для рассматриваемого класса
самолетов, высокая степень достоверности и полнота исследования во многих
случаях делают этот путь более выгодным экономически и существенно облегчают
последующую сертификацию.
3 Типовой перечень работ по исследованию флаттера может состоять из
следующих пунктов.
- составление предварительной сводки исходных данных,
- анализ данных о прототипах и аналогах проектируемого самолета,
- определение частот и форм собственных колебаний отдельных частей
самолета,
- расчет весовой балансировки органов управления,
- расчет безрулевых форм флаттера,
- составление сводки расчетных случаев и системы определяющих
параметров,
- проектирование, изготовление и испытания (частотные и трубные)
Динамически подобной модели (если это планируется),
- частотные испытания натурного самолета;
- коррекция результатов исследований по материалам частотных испытаний,
- летные испытания натурного самолета на флаттер (если отсутствовала
Динамически подобная модель).
4 Работы по проектированию, изготовлению и испытаниям динамически
Подобной модели, как правило, проводятся совместно с ЦАГИ по методи1Ййй^¥окЬ'1а8РЬги
195
разработанным в отделении аэроупругости, полому связанные с этими работами
fionpocbi в настоящем документе не обсуждаются. Если фирм а-разработчик
планирует проведение таких работ, ей необходимо обратиться за консультацией в
ЦАГИ.
5. Летные исследования флаттерных характеристик проводятся при наличии
расчетных исследований совместно с ЛИИ по методикам, разработанным в
лаборатории летно-прочностных испытаний, поэтому в необходимой степени эти
вопросы в настоящем документе также не обсуждаются.
6. Порядок проведения остальных работ в минимальном варианте, когда
самолет имеет простую и традиционную схему, излагается ниже. В случае сложной
компоновки самолета (Т-, Х-, Н- или V-образное оперение, подвесные грузы под
крылом, схема "утка" и т.д.) потребный объем работ определяется после
консультаций с ЦАГИ.
8.4 Составление предварительной сводки исходных данных
Сводка исходных данных должна содержать устанавливаемые в процессе
проектирования данные о жесткостных, массово-инерционных и геометрических
характеристиках самолета, достаточные для проведения расчетных исследований
флаттера (и для проектирования динамически подобной модели, если это
предусмотрено).
При составлении сводки следует иметь в виду, что;
а) Для крыльев, оперения и фюзеляжа применяется "отсечно-балочная"
схематизация. Все жесткостные и массовые характеристики определяются по
сечениям, перпендикулярным к оси жесткости.
б) Должны быть определены данные об из.менении веса самолета в полете и о
порядке расходования горючего из крыльевых и фюзеляжных топливных баков,
если таковые имеются.
в) Массовые и жесткостные характеристики органов управления определяют
по сечениям, перпендикулярным к оси их вращения.
г) Проводку управления схематизируют пружиной, а инерцию проводки
учитывают некоторой массой, приведенной к оси вращения органов управления -
приведенной массой.
8.5 Анализ данных о прототипах
Наличие близкого по конструкции прототипа может существенно облегчить
исследование флаттерных характеристик самолета. Обычно составляется сводная
сравнительная таблица исходных данных проектируемого самолета и прототипа.
Если характеристики их близки, и для прототипа имеются в полном объеме данные
о собственных колебаниях и флаттере, то для проектируемого самолета могут быть
выполнены только поверочные расчеты и частотные испытания. Составляется
перечень отличий. Обязательно проверяется влияние на флаттерные характеристики
тех отличий, которые могут уменьшить запасы. Сопоставление данных частотных
испытаний должно подтвердить близость характеристик.
196
8.6 Определение частот и форм собственных колебаний отдельных частей
самолета
Работы по определению частот и форм собственных колебаний отдельных
частей самолета (крыло, оперение, фюзеляж, хвостовые балки, рули) имеют целью:
- дать исходные данные для анализа спектра собственных частот (который в
дальнейшем будет получен полными расчетами самолета в целом и при ею
частотных испытаниях);
- дать необходимые материалы для предварительного расчета весовой
балансировки органов управления (в дальнейшем расчет балансировки уточняв 1ся
по мере уточнения данных о собственных формах колебаний самолета);
- получить формы колебаний, необходимые для расчета флаттера отдельных
частей самолета. При этом определяют:
а) Частоты и формы первого тона чисто изгибных и первою тона чмо о
кругильных колебаний всех несущих поверхностей. Крыло (несущая поверхность)
считается жестко закрепленным по своей бортовой нервюре. Если есть основания
предполагать, что деформациями заделки нельзя пренебречь, то наряду с таким
расчетом производится расчет с учетом упругости заделки в фюзеляже (г.е. с учетом
податливости шпангоутов фюзеляжа). Если крыло имеет подкос, ю, помимо
указанного, расчет производится отдельно для консоли крыла в предположении,
что подкос является местом жесткой заделки. Определяется влияние на частоты я
формы колебаний жесткости подкоса и изменения координат места крепления
подкоса к крылу.
б) Частоты и формы первых тонов колебаний вертикального изгиба
фюзеляжа (хвостовых балок) с оперением, а также податливость узлов крепления.
Хвостовая часть фюзеляжа (хвостовая балка) считается жестко закрепленной
в неподвижную стенку по сечению, расположенному посередине между узлами
крепления балки к крылу. За длину хвостовой балки принимается расстояние ог
защемления до середины расстояния между узлами крепления оперения к бзлкс.
в) Частоты основного тона колебаний изгиба рулей (элеронов) на опорах.
Опоры предполагаются жесткими.
г) Частоты и формы основного тона крутильных колебаний рулей (элеронов?
в предположении, что проводка управления жесткая, а также с учетом упругости
проводки управления и упругости связей между отдельными частями руля
(элерона), если он разрезной.
Для исследования собственных колебаний может применяться любая
методика (и сертифицированное программное обеспечение) исследования
динамики упругой конструкции. Удобной является балочная схематизация и метод
последовательных приближений для анализа форм и частот собственных
колебаний. Для несущих поверхностей малого удлинения применяют метод
полиномов. Можно применять и более сложные алгоритмы (например, метод
конечных элементов).
www.vokb-la.spb.ru
197
8.7 Определение частот и форм сооственных колебаний самолета в целом
Эти расчсгы производят после того, как в процессе проектирования самолета
установлены все его основные параметры, с целью:
- получения данных о спектре собственных частот и форм колебаний,
- получения уточненных данных для расчет весовой балансировки органов
управления;
- получения данных, необходимых для расчета флатгера самолета в целом.
Рассчитывают порознь связанные (совместные) симметричные и
антисимметричные колебания. Формы и частоты определяют в предположении, что
элероны (рули) составляют одно целое с крылом (оперением). Вычисляют
несколько тонов симметричных и антисимметричных колебаний.
8.8 Расчет весовой балансировки органов управления
Весовая балансировка органов управления - важнейший способ борьбы с
рулевыми и элеронными формами флаттера.
- Как правило. весовая балансировка достигается путем установки
специальных грузов. Задача расчета весовой балансировки - подбор величины и
расположения этих грузов - балансиров. При отсутствии весовой балансировки
флаттер рулей или элеронов может возникнуть при весьма низких скоростях полета
- даже на взлете. Считается, что элерон (руль) статически сбалансирован, если его
центр тяжести расположен на оси вращения. Статическая балансировка является
условием необходимым, но недостаточным для предотвращения флаттера Нужна
еше и так называемая полная весовая балансировка, учитывающая деформацию
самолета и органов управления, при колебаниях.
Балансировка элеронов
Наилучшим способом балансировки является тот, при котором
сбалансировано каждое сечение элерона. Установка балансиров на элеронах
должна предотвратить появление:
- изгибно-элеронного флаттера (изгиб крыла - отклонение элерона, как
жесткого тела);
- крутильно-элеронного флаттера (кручение крыла - отклонение элерона, как
жесткого тела);
- флаттера, сопровождающегося деформациями самого элерона (изгиб крыла
- кручение крыла - отклонение элерона - изгиб элерона - кручение элерона). Для
безопасности самолета от изгибно-элеронного флаттера подбирают балансиры так,
чтобы на элеронах имелась полная весовая балансировка.
Степень весовой балансировки зависит не только от положения центра
тяжести и величины балансирующего груза, но и от места установки последнего на
элероне. Цель установки балансирующих грузов заключается в создании
инерционных сил, препятствующих отклонению элерона при изгибных колебаниях
крыла. Эти силы зависят, в частности, и от амплитуды изгибных колебаний тех
сечений, в которых располагаются балансирующие грузы (например, если
установить балансирующий груз в сечении, в котором находится узел изгибных
колебаний, то независимо от величины груза он не будет создавать никаких
инерционных сил, и элерон будет вести себя как несбалансированный).
198
Закон распределения амплитуд по размаху характеризуется функцией f(z) -
формой изгибных колебаний.
Степень весовой балансировки элерона определяется коэффициентом;
К, = -fm3o3f(z)dz
Z]
где Zi, Zj - расстояния начала и конца элерона от борта фюзеляжа,
nij - масса элерона на единицу длины,
а, - расстояние от центра масс сечения элерона до оси вращения.
Если балансировка осуществлена установкой нескольких сосредоточенных грузов,
массы которых М|, Мг, ... находятся впереди оси вращения элерона на расстояниях
оь о?, — и от борта фюзеляжа - на расстояниях Zj, z? ... , то коэффициент Кэ
определяется формулой:
Кэ - - J m3o3f(z)dz +
7, ।
Если коэффициент Кэ=0, ю элерон считается полностью сбалансированным,
если К, < 0, то элерон недобалансирован, если К, > 0, то элерон
перебалансирован. Как видим, само по себе условие помещения центра тяжести
элерона на его оси вращения еще не определяет степени весовой балансировки.
Может потребоваться вычисление величины К3 и по функциям изгибных
колебаний fjjz) более высоких тонов.
На элеронах должны быть установлены с определенным запасом балансиры,
обеспечивающие выполнение условия полной балансировки для самого тяжелого
случая, т.е. когда требуются балансиры с наибольшим статическим моментом (при
этом для остальных случаев элерон окажется перебалансированным).
Балансировка рулей
Степень весовой балансировки Кр вычисляется по формуле
К‘р = мрОр +(J„P .мрОррХ^Х„,,+лк;
где Мр- масса руля высоты:
Мр = 2fmpdz
Z,
mp- погонная масса руля высоты,
ор- расстояние от общего центра тяжести половины руля высоты до его оси
вращения (расстояние считается положительным, если центр тяжести
лежит позади оси вращения),
Jmp- массовый момент инерции относительно оси его вращения.
Jmp = 2jj;pdz
J*mp- погонный массовый момент инерции руля высоты относительно оси
вращения,
р- расстояние от оси вращения руля высоты до оси z. проходящей посредине
между узлами крепления стабилизатора к фюзеляжу (х ),
[ j _ производная от функции формы изгибных колебаний фюзеляжа в
кПхЛ,
л — 4 ф
точке х =6ф - точке крепления стабилизатора к фюзеляжу, wwwvokb las bi
Zj, z2 - расстояния от борта фюзеляжа до начала руля высоты и до конца его,
199
ЛКр- добавок от балансира, вычисляемый лнллщично.
Условие Кр=0 есть условие полной динамической балансировки,
препятствующей возникновению симметричного изгибно-рулевого флаттера.
В случае Кр < О руль считается недобалансированным.
Может потребоваться величину Кр вычислить для нескольких первых тонов
симметричных колебаний.
Условие Кр— 0 определяет ту балансировку, при которой невозможно
возникновение крутильного рулевого (т.е. ан асимметричного) фланера:
= -2Jmpop9pzdz - ЛК£,
7]
где фр - функция формы крутильных колебаний. В первом приближении <рр можно
считать равной единице. В случае Кр < 0 руль считается недобалансированным.
На руле должны быть установлены, с определенным запасом, балансиры,
обеспечивающие выполнение условий полной балансировки для самого тяжелого
случая
' 8.9 Предварительный расчет безрулевых форм флаттера
Расчеты изгибно-крутильного флаттера проводятся для всех несущих частей
(крыла, стабилизатора, киля). Расчеты производят в предположении, что крыло
(оперение) жестко защемлено в неподвижной стенке.
Для определения критической скорости у земли необходимо знать:
- значение жесткостей изгиба EJ и кручения GJKp по размаху несущей
поверхности;
- значение погонной массы ш по размаху;
* значение массового момента инерции JI:- относительно оси жесткости по
размаху;
- по габаритному чертежу в плане с нанесенными на нем осью жесткости и
линией центров тяжести определяют значения хорды Ь, расстояния от передней
кромки до оси жесткости Хф, расстояния от места крепления несущей поверхности
к фюзеляжу до конца f и расстояние от оси жесткости до центра тяжести о;
ccv
значение --- крыла.
га
Вычисляются основные коэффициенты.
а ”=* а22=gj Д 3
О \OZ J О
b12 = -5^pfbf<<>dz; b22 = -| " zjbVdz;
2 < да) о 2 oct J о \ Ъ 47
d" = 4(S₽[bf2dZ; d“ = - I
200
cn --j mf2dz; c12 - c21 ~ f niofcpdz; c22 - fJtt]o2dz.
0 0 0
Функции f и ф, входящие в эти формулы, являются формами раздельных
колебаний изгиба и кручения крыла, соответственно. Функция f измеряется по оси
жесткости, а ср - относительно оси жесткости. Значение р плотности воздуха
берется у земли.
Отметим, что парциальные частоты изгибных и крутильных колебаний крыла
в пустоте рнз1 и ркр, соответственно, определяются соотношениями:
JP Hz’ Pk₽=2^J^Hz
2л\|си F 2тЦ с22
Если они известны из расчета частот, коэффициенты ац и а22 можно
определить без интегрирования:
а, 1 = 4я2 р23 rCi , , а22 = 4я2 р2р с22
Далее вычисляются коэффициенты:
Ai-cnc22-Ci2c2i;
С]~Cn^bz+^l 1С22.
Dl=d11a22+alld22;
Е1=аца22.
Bj=d11C22+C]id22-Ci2d21-C2Idj2.
С2=с 1 ib22-bI2c21+d 1 id22~d i2d2 ];
D2=dnb22-bi2d2i;
E2=anb22.
После этого вычисляются коэффициенты, через которые непосредственно
выражается критическая скорость:
L = - D2Ai);
М= B]C2Dj + B^Dr Bj2E2 - 2D!D2Ab
N= BiCjD] - Bj2Ei - Di2Ab
Критическая скорость определяется по формуле:
2 -M±VM2 -4LN
кр ~ 2L
Перед радикалом знак выбирается таким образом, чтобы получить
наименьшее значение V^. Частота флаттера рфд определяется соотношениями:
www.vokb-la.spb.ru
201
Расчеты по такой схеме производя? на начальной стадии проектирования
Они имеют целью получи гь основные флаттерные характеристики, т.е. "
критическую скорость и систему определяющих параметров самой (изолированной) i
несущей поверхности.
Результаты расчетов позволяют:
в ходе проектирования частей самолета указать совокупность
конструктивных мероприятий по повышению, если это необходимо, их
критической скорости;
- облегчить последующий анализ результатов полных расчетов на флаттер
самолета в целом;
- при планировании летных испытаний определить основные тона, которые
потребуется возбуждать и регистрировать в полете.
8.10 Пример расчета
В качестве примера рассмотрим крыло легкого самолета со следующими
исходными данными (единицы измерения: см, кГс, сек):
1 = 318, р = 0,125*10Л = 4,64, Ризг = 15,0 Hz, ркр = 48,5 Hz
да р
Z/1 зез GJkd *10-8 m *104 •1m b «о 0 f ©
0 154.0 6,80 10,60 0.7644 160,5 62.00 7,5 0,0 0,0
0,1 121.0 6,10 10,20 0,7971 150.9 58,40 5,98 0,0071 0,138
0.2 92,02 4,90 8,600 0,7501 141,2 54,80 5.53 0,0288 0.282
0.3 53,92 4,50 4,300 0,5202 131,6 51,20 7,28 0.0677 0,411
0,4 39,32 3,40 1,300 0,2403 121,9 47,60 10,47 0,128 0,515
0,5 28,32 2,60 1,159 0,130 112,3 44.01 11,3 0,213 1 0.611
0.6 20,92 1,80 1,153 0,100 102.6 40,41 10,45 0,321 0,709
0.7 13,02 1,30 1,00 0,0800 92,97 36,81 9,45 0,452 0,802
0,8 3,994 0,80 0,76 0,0501 83,32 33,21 7,50 0,609 0,885
0,9 2,0 0,40 0,97 0,0340 73,68 29,6 5,52 0,795 0,961
1,0 1,0 0,20 0,74 0.0261 64.00 26,0 3.16 1,0 1.0
После интегрирования (например методом трапеций) получаем:
cn = 0.53632-IO’2; cl2 = c2I = -0,59393 10'1 , c22 = 14,653,
a„ - 47,874; a22 = 0,13607 -107; b12’= -0,20044 10 4;
b22 - -0.49646 IO-3; dn = 0,13398 KT4; d12 = -0,61001 JO’3
d2] = 0,25563 10"3; d22 - 0,11398-IO’1.
“Большие” коэффициенты, критические скорости и частоты флаттера будут
такими:
А, = 0,7506 - IO4; В, = 0,2354 • 10‘3; С, = 0,7999 - Ю4; С2 = 0,35441 - Ю'5;
Dj = 18,776; D2 = -0,1527 108; Е, -- 0,65142 10е; Е2 - -0,023765;
L 0,11043*10 17; М = -0,12987 10 7; N = 5,4039;
VKpl = 0,20784 • 105с м/ с е к; р^ = 44,1 Hz;
VKp2 = 0,10643 106 см/сек; Рфл2 = 12,6 Hz.
202
чТо соответствует 748 и 3830 км/час. И качестве VKp берется минимальное значение.
те. 748 км/час. Второе значение дает скорость выхода из флаттера (см. рис.8.3).
Если бы она оказалась реальной, то на этой скорости флаттер исчез бы.
8.11 Расчет рулевых форм флаттера
Для самолетов сложных схем не ограничиваются подбором весовой
балансировки, а производят также расчеты и самой критической скорости рулевых
форм флаттера. Эти расчеты включают:
- расчет изгибно-рулевых (изгибно-элеронных) форм флаттера в зависимости
от степени весовой балансировки и жесткости проводки управления;
- расчет крутильно-рулевых (кругильно-элерониых) форм флаттера. Сюда же
относится флаттер оперения со степенями свободы: кручение стабилизатора (киля)
- отклонение руля. Исследуются зависимости от степени балансировки и от
жесткости проводки управления. По результатам таких расчетов делается
заключение о достаточности принятой степени весовой балансировки органов
управления.
8.12 Расчет на флаттер самолета в целом
Эти расчеты проводят с целью:
- установить "расчетные случаи", т.е. наиболее опасные из всех возможных
форм флаттера, и выработать систему конструктивных мероприятий, которые
надлежит выполнить на проектируемом самолете, чтобы получить необходимую
величину запасов;
- уточнить и дополнить сведения о флаттерных характеристиках, полученных
в результате расчетов изолированных частей самолета;
- оценить, если это необходимо, влияние внутреннего трения в конструкции
на величину критической скорости флаттера.
Такие расчеты выполняются на ЭВМ. Программа расчетов может быть одной
из стандартных, принятых в ЦАГИ, или собственной программой фирмы-
разработчика. В последнем случае программа должна быть сертифицирована.
8.13 Контрольные испытания для проверки и уточнения исходных данных.
’ Частотные испытания
Контрольные испытания заключаются в следующем:
а) Проводят опытным путем проверку весовых характеристик всех частей
самолета - определяют величину и распределение масс, моментов инерции,
положение линии центров тяжести, и сопоставляют найденные характеристики с
проектными.
6) Проверяют опытным путем правильность выполнения проектных данных
по весовой балансировке, т.е. соответствие проектных и фактических координат
центра тяжести органов управления. Учитывая особую ответственность этой
операции, к ее выполнению привлекают ОТК, и результаты проверки фиксируют
специальным актом.
в) Определяют жесткости отдельных частей самолета и сопоставляют
найденные эпюры и величины жесткостей с проектными. www.vokb-la.spb.
203
г) I Io программе, согласован пой с ЦАГИ, проводят под его руководством
частотные испытания, т.е. определяют формы и частоты собственных колебаний
самолета, укрепленного на специальной подвеске.
Кроме того, предварительно проводят стендовые частотные испытания, т.е <
испытания отдельных изолированных частей самолета.
Экспериментальное исследование собственных колебаний самолета
составляет один из важнейших этапов всей работы по анализу флаттера, так как
только после него устанавливают, во-первых, правильно ли при расчетах и
моделировании флаттера отражена действительная упруго-массовая схема самолета
и, во-вторых, необходимы ли дополнительные расчеты и испытания по учету
влиянии на флаттер каких-либо новых факторов, если таковые обнаружены в
результате контрольных испытаний.
8.14 Коррекция результатов анализа по данным контрольных испытаний
При этом:
а) Проверяют, уточняют и корректируют расчет потребной весовой
балднеировки органов управления, вводя экспериментально полученные весовые
характеристики и формы собственных колебаний конструкции. Корректировка
расчетов весовой балансировки заключается в том, что по окончательным весовым
характеристикам вычисляют потребную балансировку, задаваясь теоретическими
значениями форм собственных колебаний конструкции и, кроме того, их
экспериментальными значениями. Расчетным признают тот вариант, в котором
(при заданном плече) получается больший вес балансиров.
6) Корректируют расчеты на флаттер.
в) Корректируют результаты испытаний динамически подобных моделей,
находя поправочные коэффициенты к масштабам подобия из сопоставления
спектра частот и форм собственных колебаний моделей и натуры.
8.15 Составление сводных данных по безопасности от флаттера
а) Подытоживают результаты всех проведенных работ; сопоставляют
результаты расчета, опыта и испытаний моделей; составляют сводку "расчетных
случаев" и сводку запасов по параметрам; устанавливают летные ограничения по
скорости.
б) Составляют, если это необходимо, требования и пожелания к программе
летных испытаний опытного самолета.
в) В процессе летных испытаний первого самолета проверяются выводы о
безопасности от флаттера, сделанные в результате предшествовавшего анализа.
8.16 Летные испытания на флаттер
Этот вид испытаний наименее желателен из-за повышенной опасности
флаттера и проводится лишь тогда, когда отсутствуют экспериментальные данные
трубного эксперимента и нет близкого прототипа. Методика летных испытаний
должна предусматривать очень осторожный подход к критическим режимам. На
самолете должны быть предусмотрены средства возбуждения колебаний и средства
регистрации. Расчетные исследования должны показать, какие именно формы
204
колебаний надо возбуждать в полете и, как это можно осуществить на натурном
околете. Уровень возбуждения должен быть статочным, чтобы по записям
колебаний можно было судить о важнейших собственных частотах колебаний и
демпфировании. Выход на границу флаттера в летном эксперименте должен быть
исключен. Критическая скорость определяется экстраполяцией. Необходимо
отметить, что летный эксперимент позволяет оценить запас по скорости
(см-рис.8.1). Определить с его помощью запасы по параметрам удастся весьма
редко. В этом состоит главное отличие трубного эксперимента на моделях от
натурного в полете. Соответственно, при отсутствии динамически подобной модели
требования к объему и глубине расчетных исследований резко возрастают.
Заключительные замечания
Нормативные требования (например, АП-23) не предписывают обязательное
использование того или иного метода исследования характеристик флаттера при
доказательстве соответствия, однако, в любом случае потребуется проводить
расчетные исследования и частотные испытания натурного самолета. Объем работ
существенно зависит от сложности конструкции - чем более сложна я необычна
схема, тем больше потребуется экспериментальных и теоретических (расчетных)
исследовании. Предварительные консультации с ЦАГИ помогут фирме-
разработчику составить оптимальный план работ, достаточных для сертификации
любого нового самолета.
www.vokb-laspb.ru
205
IX. ОБЕСПЕЧЕНИЕ БЕЗОПАСНОСТИ ПО УСЛОВИЯМ
СТАТИЧЕСКОЙ АЭРОУПРУГОСТИ САМОЛЕТОВ ОБЩЕГО
НАЗНАЧЕНИЯ
Введение
Вследствие упругих деформаций конструкции меняются аэродинамические
характеристики самолета. Это изменение зависит о г размеров, жесткостных харак-
теристик самолета, распределения его масс, а также от скоростного напора полета.
Оно может быть благоприятным, ведущим, к примеру, к снижению аэродинамиче-
ских нагрузок и повышению весовой отдачи конструкции. Но чаще всего эго изме-
нение неблагоприятно. В нормативных документах регламентируется необходимый
запас по скорости (20%) сверх предельной скорости VnwX inax по отношению к кри-
тическим значениям скоростей реверса органов управления, а также дивергенции
(VKP реп * 1,2 vmaxniax; Укрдив > 1,2 Vmax max)- Кроме того, в число важных задач ста-
тической аэроупругости входит определение влияния упругости конструкции на за-
пас устойчивости самолета (положение аэродинамического фокуса), условия балан-
сировки, аэродинамическое качество и т.д. - с учетом распределения масс конст-
рукции. Для самолетов традиционных аэродинамической и силовой схем, с тради-
ционным распределением жесткостей несущих поверхностей соответствие самоле-
тов нормативным требованиям может быть подтверждено расчетами по сертифици-
рованным методикам и программам расчета.
В наиболее напряженных случаях для конструкций самолетов необычных
схем нельзя ограничиться только расчетами, и проводятся также эксперименталь-
ные исследования аэроупругих характеристик, в частности, в аэродинамических
трубах на упругоподобных моделях. Кроме того, принятая в расчете схема силовой
конструкции уточняется, при необходимости, по результатам жесткостных испыта-
ний конструкции в процессе статических прочностных или вибрационных испыта-
ний.
Расчетные исследования необходимы на всех стадиях создания самолета, на-
чиная с самой ранней. Выполняются они с использованием апробированных мето-
дов, отвечающих заданным требованиям по точности, оперативности и экономич-
ности.
В отечественной практике нашли основное применение три метода. Метод
многочленов [11, [2], а также метод коэффициентов влияния |3], |4J - для несущих
поверхностей произвольной формы в плане и так называемый метод Гроссмана -
для несущих поверхностей большого удлинения, схематизированных балкой [5-6].
Основное внимание в этой главе уделено последнему методу, применяемому
на ранних стадиях проектирования, а также для оперативных оценок самолетов
традиционных схем. Вместе с тем, приведена краткая характеристика других мето-
дов, предназначенных для исследований на более поздних, рабочих стадиях проек-
тирования, используемых в качестве поверочных методов расчета, а также для
оценки характеристик самолетов сложных схем с учетом возможных повреждений и
отказов конструкции.
Перечень и последовательность работ, необходимых для анализа безопасно-
сти самолетов общего назначения по условиям реверса органов управления и ди-
вергенции, а также основные принципы организации соответствующих расчетных и
экспериментальных работ по сертификации самолетов аналогичны принятым для
обеспечения безопасности от флаттера (см. главу VIII). В любом случае для доказа-
тельства соответствия самолета нормативным требованиям необходимы расчетные
исследования и жесткостныс испытания конструкции. Необходимые объем и мето-
ды исследований, проводимых фирмой-разработчиком, зависят от сложности аэро-
206
динамической и конструктивной схем самолета Эти исследования целесообразно
согласовать с ЦАГИ на возможно более ранней стадии проектирования самолета.
9.1 Методы коэффициентов влияния и многочленов
Метод многочленов и метод коэффициентов влияния (МКВ), широко ис-
пользуемые практически на всех этапах создания ЛА, основаны на линеаризован-
ной постановке расчета стационарных аэродинамических характеристик, при кото-
ром ЛА моделируют тонкими профилированными слабоизогнутыми новерхноешми,
произвольно расположенными в пространстве. ццЭти методы базируются также на
приближенной расчетной модели силовой конструкции агрегатов, в которой ис-
пользован математический аппарат метода заданных форм, при этом упруго-
массовые свойства конструкции воспроизводит система риулярных подкопегрук-
ций, связанных между собой дискретными пружинами, а в качестве заданных форм
используют полиномы
Основные соотношения, используемые, к примеру, при реализации метода
коэффициентов влияния, приведены ниже:
fa=qSA-‘at, (9.1) *
где fa - столбец аэродинамических сил;
q - скоростной напор;
S - матрица, у которой элементы главной диагонали равны площадям пане-
лей, а остальные равны нулю;
А - матрица коэффициентов аэродинамического влияния;
ott - столбец местных углов атаки панелей.
Связь внешних сил и деформаций устанавливается соотношением:
=w = c"'f, (9.2)
где Оупр - столбец угловых деформаций;
С af - матрица упругого влияния;
f - столбец внешних сил;
Массово - инерционные силы описываются в виде столбца массовых сил;
fm = -<g + ®zV)M, (9.3)
где g - ускорение свободного падения,
V - скорость полета,
- угловая скорость тангажа,
М - столбец масс панелей.
С учетом сц = аж + <эуПр, fa= q S dp, (9.4)
где ссж - столбец местных углов атаки жесткого самолета,
dp - столбец коэффициентов перепадов давления,
получается соотношение:
(А - q С S) dp = а = аж - Caf (g + w7V) М (9.5)
Решая эту систему линейных алгебраических уравнений для заданных рас-
пределений углов атаки жесткого ЛА и масс, можно получить распределение давле-
ния ио упругому ЛА. Аналогично систему уравнений можно составить и для дви-
жения ЛА в боковой плоскости по крену и рысканию.
В расчетах аэродинамические коэффициенты жесткого ЛА соответствуют ну-
левому значению скоростного напора (q=0), а влияние упругости конструкции оп-
ределяется относительными значениями производных аэродинамических коэффи-
циентов упругого ЛА - при текущем значении q - и жесткого ЛА, например,
www. vokb-la. spb.ru
207
(9.6)
где: су,„г- производные аэродинамических коэффициентов упругого ЛА,
, с“ -то же для жесткого ЛА.
Для расчета ЛА, имеющего сложную силовую схему, а также для поверочных
расчетов на конечных стадиях разработки, применяются методы, основанные на
методе конечных элементов. При этом максимально используются такие преиму-
щества расчетных методов, как возможность широкой вариации параметров; влия-
ния жесткости конструкции с учетом возможных повреждений, распределения
масс, скоростей, высот полета и т.д.
9.2 Метод Гроссмана
Ниже представлены алгоритмы и программа расчета критических скоростей
реверса элеронов, других рулей, а также расчета критической скорости дивергенции
консолей несущих поверхностей большого удлинения, схематизируемых по жестко-
стны.м характеристикам балкой.
Алгоритм программы. Для определения относительной эффективности £ эле-
ронов необходимо вычислить момент крена (Мх)уир при различных значениях ско-
рости V (числа М) и высоты Н полета. Предположения, на которых строится метод
расчетного определения величины изложены ниже.
1. Крыло моделируется балкой с прямой осью жесткости, имеющей те же
значения жесткости на изгиб EI и жесткости на кручение GlKp, что и натурное
крыло. Оно жестко заделано в фюзеляже. Вследствие этого, связь между крутящим
моментом от аэродинамических сил MKD, в сечении z (рис. 9.1) и относительным
de
углом закручивания — дается формулой:
dz
M.P = GI,p*. (9.7)
Изгибающий момент от аэродинамических
воздействий Мизг в том же сечении связан с
. d2v ,
кривизной оси жесткости у (z) = —у фор-
dz2
мул ой:
м"’1г=Е,ё' <9'8)
2. Предполагается, что распределение
аэродинамических воздействий на деформи-
рованном крыле такое же, как на жестком.
Поэтому:
p(z) = qcos х b(c* 5 + с“ Да) (9.9)
p(z) - qcos х b2 (c^£ 6 + < Да) (9.10)
здесь:
X - угол стреловидности оси жесткости
(рис. 9.1). Для крыла прямой стреловидности
X > 0, для крыла обратной стерловидности
х <0;
Рис.9.1
да - приращение угла атаки в селении z;
§ - угол отклонения элерона.
Хд- расстояние от оси жесткости до передней кромки.
Значения с”, с* и положения аэродинамических фокусов, обусловленных
изменением угла атаки X,. , и угла отклонения элерона Xis, должны быть заданы
для различных значений числа М.
3. Углы Да, е и девиация y'(z) связаны зависимостью (рис.9.1):
Aa(z)=6(z)cosx-y'(z)sinx (9.12)
Дифференцируя (9.12) по z и подставляя в полученное выражение G’(z) и у"
по (9.7) и (9.8), получаем
dAa Мкр МИ21 .
dz Sl,1>-
Aa(z) = cos xf - sin xf
oUlKp о tl
Так как
t
MKp(z) - cos xl p(z)dz,
z
z £ /
Мизг (?) = f dzf p(z)dz - sin xf p(z)dz
(9.13)
(9.14)
TO
Aa(z) = q cos x[<D(z)5 + f ^=f c“ Да b2 dz - sin xf f dzf c“ Aabdz I, (9.15)
L о GIz о th I J
где
<b(z) - f Д f 4. b2dz - sin xf ~! dzf cj bdz,!
O GI j о tJ z z ! <4
1 _ COS2X Sin2 X I
GI ~ GIKP + EI !
Уравнение (9.15) есть искомое уравнение, определяющее приращение угла
атаки Aa(z) стреловидного крыла при отклонении элерона на угол б.
После того, как из уравнения (9.15) определено приращение угла атаки Aa(z),
момент крена (Мх)упР вычисляется по формуле
(Мх)упр = cos xf P(?)(z + £®)dz (9.17)
О
где в величину p(z) следует подставить вычисленное по уравнению (9.15) значение
Да; е ф - расстояние от бортовой нервюры до оси симметрии, отсчитываемое по оси
жесткости (рис. 9.1)
Изложенными выше методами расчета оценивались моменты крена упругого
крыла (Мх)упр по сравнению с моментом крена недеформированного, жесткого
крыла (Мх)ж в статических условиях. Если пренебречь влиянием оперения на из-
менение характеристик крена, то можно построить метод расчета угловой скорости
крена в установившемся вращении самолета относительно продольной оси.
208
ww^y<yokb-la.spb.
* Для определения yi левой скорое in ох установившегося движения крена и
эффективности элеронов используются уравнения упругого равновесия сечения
крыла под действием аэродинамических воздействий (рис. 9 1) и условия динами-
ческого равновесия самолета при его установившемся вращении относительно
оси X.
В развернутом виде эги уравнения могут быть записаны следующим образом.
Aa(z) --- q cos х[Ф(г)5 - f(z)ax
f -S-f Cm, b2 Aadz- sm % J f dzj c“bAadz I,
о Юг о Ь! , 7 J
'-fc;bAa(z)(z+«4>)dz
А2 А2 о
(9.18)
где
Ф(г) = f = f c^e b2 dz - sin xf — J dzj cj bdz,
о I (j / о Ы / 2
f< dz J 5 , Z + /’ф , / dz < , ‘ „ z + /ф
f(z) = J J= f <4 b - - dz - sin x! = I dzj c; b -- — dz,
Ai = J cjb(z + ^)dz, A2 - j c“b dz,
о » о • + Гф
— Cl) X f
®x = “y~
(9.19)
Из уравнений (9.18) определяются значение Aa(z) и cdx, обусловленные от-
клонением элерона на угол 6. Система (9.18) решается методом последовательных
приближений.
Эффективность элеронов определяется величиной
с _ (М*)упр! е _ (м<)упр I
(М>>» (М«>ж I.
а критический скоростной напор реверса элеронов уравнениями
£ = 0; й х = 0
(9.20)
(9.21)
При определении критической скорости дивергенции (также как и в расчете
эффективности элеронов) крыло принимается за балку с прямой осью жесткости
Предполагается, что закон изменения аэродинамических нагрузок на деформируе-
мом крыле такой же, как на жестком
Уравнение, связывающее приращение угла атаки Aa(z) при деформациях, с
жескостными и аэродинамическими характеристиками, следующее:
Aa(z) = qcosx
Lo bl z
z dz z 1
b2 Aa(z)dz - sm xJ I dzf c“ bAa(z)dz
0 7 7
(9.22)
Это интегральное уравнение решается методом последовательных приближе-
ний. При этом находится то значение скоростного напора q, которое является соб-
ственным значением уравнения (9.22).
Инструкция к программе. Программа предназначена для вычисления крити-
ческой скорости дивергенции, а также относительной эффективности элеронов
lw =0
210
(M»U
k”r (Мх)ж
_ (M*)ynp
ят~ (м,)„
в зависимости от чисел М и скоростного на-
<u *0
пора q
Для каждого значения М получается зависимость t,=^(q) по высотам Н Зна-
чение высоты выбирается так, чтобы перекрывался весь диапазон от Н = 0 до Нп1ах
Для расчет эффективное!!! £ консоль крыла разбивается по размаху на 21
сечение, и значения жесткостей GIKp, EI, геометрических параметров Ь, Хо, а !ак-
же аэродинамических характеристик с® и XF;, задаются в числовом материале в
21-й точках. Аэродинамические характеристики с® и XHj, задаются постоянными в
различных сечениях крыла для заданного числа М.
Описание входной информации.
Строка 1. READ(1, '(А40)') TEXT
TEXT- текстовая информация, выносимая в заголовок распечатки.
Строка 2. READ(1,*) NH, NM, ZK, ZF, SN, CS, LD
NH -количество высот,
NM - количество чисел Маха,
ZK - расстояние от борта крыла до концевой хорды, отсчитываемое по
оси жесткости,
ZF - /ф- расстояние от борта крыла до оси симметрии самолета, отсчиты-
ваемое на оси жесткости,
SN - яп х]
) X - угол стреловидности оси жесткости.
CS-cosxj
LD - управляющий параметр при расчете критической скорости дивергенции,
LD = К - К - номер числа М, для которого вычисляется критическая ско-
рость дивергенции,
LD=-1 - критическая скорость дивергенции рассчитывается для всех значе-
ний чисел М;
LD=O - критическая скорость дивергенции не рассчитывается.
Строка 3. READ(1,*) (EI(I), 1=1,21)
El-21 - значение жесткости крыла на изгиб,
Строка 4 READ(1,*) (GI(I), 1=1,21)
GI-21 - значение жесткости крыла на кручение;
Строкам. READ(1,*) (В(1), 1=1,21)
В-21 - значение хорды крыла (берется по потоку);
Строка 6.
ХО - Хо -расстояние от передней кромки крыла до оси жесткости (отнесенное
READ(1,*) (XO(I)J—1,21)
к собственной хорде) в сечении i.
READ(1,*) (SM(1), 1=1,21)
Строка 7.
SM - числа Маха.
Строка 8 READ(1,*) (CYA(I), 1=1,NM)
CYA - с" (M) - значения производной коэффициента подъемной силы по углу
атаки крыла (а) для заданных чисел М.
Строка 9. READ(1,*) (XF1(1), 1=1,NM)
XF1 -Хг (M) - относительное положение первого аэродинамического фокуса
крыла, для заданных чисел М.
Строка 10. READ(1 ,*) (Н(1). 1=1,NH)
www.vokb-la.spb.ru
211
Н - значении высот
Строка И ‘RtAD(l ,*) (А(1), 1=1,NH)
А-а - скорость звука для соответствующих чисел М.
Строка 12. READ(1,*) (R(I), 1=1,NH)
R - р - плотность воздуха для соответствующих чисел Н.
Сфока 13. READ(1,*) (XF2(1), 1=1,21*NM)
XF2 - Хь - относительное положение второго аэродинамического фокуса
крыла, для заданных чисел М (вводятся по 21-значению для каждого
Маха).
Строка 14. RLAD(1,*) (CYD(I), I=l,2l*NM)
CYD-Су - производная коэффициента подъемной силы по углу онслонения
элерона (б) (вводятся по 21 -значению для каждого числа Маха).
Описание выходной информации
На печатающее устройство выводится следующая информация.
1 Исходные данные.
2 . Значения числа М.
3 Значения высот Н
4 . Значения скоростных напоров q.
5 - (Мх)ж - момент крыла на жестком крыле, для соответствующего значения
Пример расчета. В качестве примера
рассмотрено крыло среднего строительного
удлинения. Расчет проведен‘для значений
чисел М=0,5, 0,6; 0,7, 0,8, 0,9 в диапазоне
скоростного напора q=0-6000 кг/м2.
Результат работы программы приве-
ден для М=0,7; 0,9 в виде графика на
рис 9.1.
На рис. 9.1 также приведены результаты
расчета относительной эффективности этого
же крыла, полученные методом коэффици-
ентов влияния.
На рис. 9.2 показано влияние упруго-
сти конструкции двух типичных самолетов
класса АОН на эффективность элеронов и
руля высоты.
м=о.з
О 400 800 1200 q.KF/M2
Рис 9.2
212
X. ЭКСПЕРИМЕНТАЛЬНЫЕ И ТЕОРЕТИЧЕСКИЕ МЕТОДЫ
ИССЛЕДОВАНИЯ ШТОПОРА
Введение
Важное!ь исследования проблемы полета на больших углах атаки обусловле-
на, прежде всего, необходимостью обеспечения безопасности эксплуатации самоле-
та и предотвращением возникновения сваливания самолета и попадания его в што-
пор Неслучайно по мировой статистике летных происшествии свыше пятидесяти
процентов аварий и катастроф происходит именно на Э1ИХ режимах |10) Некото-
рые результаты исследования проблемы штопора содержатся в |2], [3] |4|, (20),
(36], [37].
Проблемы сваливания и штопора являются критическими для всех типов са-
молеюв. Особенно ocipo они стоят для истребительной авиации в связи с освоени-
ем сверхбольших углов атаки При этом введение эксплуатационных ограничении
не всегда приемлемо, поскольку в этом случае снижаются маневренные возможно-
сти самолета.
Проблема безопасности полета на больших углах атаки весьма важна для
пассажирских и транспортных самолетов. Решение проблем полета на больших уг-
лах атаки и сопрошвляемости штопору очень важно для самолетов общего назна-
чения и административных, которые могут пилотироваться сравнительно слабо
под) ставленными пилотами.
Исследование и в значительной степени решение этих проблем может быть
осуществлено на этапе проектирования и доработки самолета и может вестись по
двум направлениям.
- удовлетворение определенным требованиям по характеристикам свалива-
ния, штопора и методам вывода из него, сформулированным дтч каждого
конкретного типа самолета (истребитель, административным, пассажирский,
транспортный, и т.д.),
- поиск аэродинамических компоновок самолетов, неимеющи< неуправляе-
мых режимов штопора.
СИ метим, что для рассматриваемого в данном выпуске класса самолетов тре-
бования к характеристикам устойчивости и управляемости на больших углах атаки,
согласно международным авиационным правилам ]27], являются достаточно жест-
кими. Эти правила достаточно хорошо коррелируются с авиационными правилами
АП-23 |34], действующими у нас в стране. В частности, согласно этим требованиям
одномоторные самолеты нормальной категории должны выходить из штопора в те-
чение одного витка или в течение трех секунд (в зависимости от того, что дольше).
При этом требуется не более одного дополнительного витка для выхода из штопора
при обычно применяемых стандартных действиях рычагами управления Причем,
при любых действиях рычагами управления не должен возникать штопор, из кото-
рого выход не обеспечен. Согласно этим же требованиям, самолет может быть от-
несен к категории нсшгопорящего, если он не имеет режимов штопора при любых
действиях органами управления. Кроме того, режимы штопора должны отсутство-
вать при выполнении ряда других условии.
- при увеличении массы на 5%,
- при смещении центра масс не менее, чем на 3% больше заявленной предельно
задней центровки,
- при увеличении утла отклонения руля высоты вверх на 4' ,
- при увеличении угла отклонения руля направления вправо/влево на 7 .
www. vokb-la. spb.ru
213
k
Для эффективного решения поставленных выше проблем требуется проведи -
яме экспериментальных и теоретических исследований для отработки аэродинами- -Д
ческой компоновки самолета на ранней стадии проектирования. Д
Проблема штопора возникла с появлением первых самолетов, и интерес ин- -
женеров и исследователей к нему все это время не ослабевает. Широко использу-
ются и постоянно развиваются различные экспериментальные методы исследовд,
ния штопора как в аэродинамических трубах, так и непосредственно в полете. Зна-
чительная роль в исследовании штопора принадлежит теоретическим и расчетным
методам на ЭВМ, значимость которых существенно возросла в последние годы. В
данном выпуске приведено краткое описание экспериментальных и расчетных ме-
тодов исследования штопора самолета. Эти методы тесно взаимосвязаны и сущест-
венно дополняют друг друз а.
Различные виды экспериментальных исследований с моделями самолетов ?
проводятся в вертикальной аэродинамической цзубе Т-105. Исследования в Т-105
включают измерения на тензометрических весах сил и моментов модели самолета
на больших углах атаки, при этом модель самолета может быть либо неподвижна,
либо осуществлять установившееся вращение относительно направления набегаю-
щего потока. Возможно проведение измерений распределения давления по поверх-
ности модели, определение спектров обтекания, визуализация пространственных
вихревых структур и т.д.
Значительную часть проводимых экспериментальных исследований занимают
опыты со свободно штопорящими и дистанционно управляемыми моделями. По
результатам таких испытаний делаются не только выводы об особенностях поведе-
ния самолета в штопоре, но и даются рекомендации по управлению самолетом дм
вывода его из режимов штопора {14], 115], [35], [36].
Для того, чтобы дать представление об экспериментальных возможностях, в
данном выпуске приведено краткое описание аэродинамической трубы Т-105 ЦА-
ГИ, ее характеристик, экспериментального и измерительного оборудования, мето-
дики эксперимента. Представлены некоторые характеристики исследуемых моде-
лей, а также получаемые типовые зависимости для аэродинамических характери-
стик и особенности динамики самолета в штопоре.
В Т-105 испытываются на штопор модели самолетов всех видов авиационной
техники - военной, гражданской и малой авиации, которая в последнее время бур-
но развивается. Методика проведения испытаний в Т-105 одинакова для всех видов ,
самолетов. Однако, при изготовлении свободно штопорящих моделей легких само-
летов необходимо учитывать некоторые особенности, которые также изложены в
данном выпуске. j
Приближенные методики расчета параметров стационарного штопора, в ко- '
тором устанавливается баланс аэродинамических и инерционных моментов, из-
вестны уже давно ]2]. Существуют методики такого расчетного исследования, ис- 1*
пользующие как приближенные графо-аналитические методы, так и расчет на ЭВМ 1
[20]. В работе [26] приведен подробный обзор подходов и методов, используемых в
различных научных центрах. «'
Эффективными методами исследования штопора являются методы бифурка-
ционного анализа. Это подтверждается в настоящее время результатами многих ис- I
следований [31], [32], [33]. Бифуркационные методы и метод непрерывного про-
должения решений по параметрам позволяют всесторонне изучить множество рав-
новесных режимов штопора и прогнозировать управление, необходимое для пре-
дотвращения штопора, а также вывода из него. Методы качественного исследова-
ния предоставляют возможности более глубокого изучения особенностей динамики
самолета в штопоре, позволяют более оптимально планировать исследования с по-
мощью математического моделирования и со свободно штопорящими моделями в
вертикальной аэродинамической трубе Т-105. Использование современных ЭВМ
214
дозволяет не только получать оценки равновесных параметров в штопоре и иссле-
довать их устойчивость, но и проводить математическое моделирование динамики
самолета в штопоре с учетом функционирования автоматической системы управле-
ния [24].
ЮЛ Критические режимы движения самолета
Предельные маневренные возможности самолета ограничены областью кри-
тических режимов полета, при которых возникают неуправляемые, самопроизволь-
ные движения, связанные с потерей устойчивости его движения (другие ограниче-
ния, такие как ограничения по прочности конструкции или усюйчивой работы
двигателей, здесь не будут рассматриваться). Летчик своими действиями может как
спровоцировать развитие неустойчивости, так и предотвратить ее. Это зависит от
характера режима полета, а также степени обученности летчика пилотированию в
особых ситуациях.
Стремление к расширению маневренных возможностей неизбежно приводит
на границу существования устойчивых режимов, где начинают проявляться нели-
нейные зависимости аэродинамических коэффициентов и динамическое взаимо-
влияние различных форм движения. Задачи исследования становятся существенно
нелинейными.
Критические режимы движения с точки зрения их классификации можно
разделить на две большие группы, отличающиеся по своему физическому смыслу.
К первой группе следует отнести режимы, когда происходит выход на грани-
цу устойчивости и начинают развиваться неустойчивые формы движения. Характер
такого движения может быть качественно различным. Он может иметь мягкую или
жесткую форму потери устойчивости, процесс может быть управляемым и неуправ-
ляемым. и всегда имеет неустановившийся характер. Такие ситуации возникают
при сваливании самолета на больших углах атаки, а также при выполнении про-
странственных маневров с быстрым вращением.
Ко второй группе критических режимов движения следует отнести устойчи-
вые установившиеся режимы полета с закритическими значениями параметров, в
частности, угла атаки и скорости вращения. Это, в первую очередь, режимы инер-
ционного вращения и штопора, для которых характерна потеря обычной реакции
на управляющие воздействия. Условия существования таких критических режимов,
а также поиск способов вывода из них являются одними из главных вопросов в за-
даче обеспечения безопасности полета.
Разнообразие критических ситуаций отражается, в частности, в множествен-
ности определений, которые сложились и используются в научной и практической
литературе как у нас в стране, так и за рубежом [25].
Так, например, под понятием сваливания (Stall) (в скобках даны термины,
используемые в англоязычной специальной литературе) объединяется целый ряд
различных форм потери устойчивости продольного и бокового движений.
Среди них можно выделить:
- внезапное увеличение угла атаки (Pitch up), возникающее на умеренных и
больших углах атаки вследствие нелинейной зависимости момента тангажа
по типу "ложка",
- устойчивый автоколебательный режим движения самолета по тангажу на
больших углах атаки в диапазоне развития отрывного обтекания (Bucking),
- кувыркание по тангажу (Tumbling), www.vokb-la.spb.ru
215
- дивер!енiное увеличение yi и ьренд (Vmg diop or Roll oft), возникающее
из-за действия несимметричных аэродинамических моментов по крену ца
больших углах атаки или аэродинамической авторотации,
- дивергентное увеличение утла скольжения (Nose slice or yaw off), являю-
щееся следствием апериодической неустойчивости движения по рысканию
или действия несимметричных аэродинамических моментов,
- устойчивый автоколебательный режим движения самолета по крену и рыс-
канию на больших углах атаки, получивший в англоязычной литературе
название Wing Rock,
- потеря устойчивости движения при вмешательстве летчика в управление,
например, при стабилизации углов крена при слежении за целью.
Достаточно обширна и классификация установившихся видов штопора
(Spin) |4|. Это, в частности
- нормальный (пу > 0) и перевернутый (пу < 0) режимы,
- режимы крутого (а ~ 30"-: 60") и плоского (а * 6О' -.-9О") штопора,
- режимы со стационарными значениями параметров,
- автоколебательные режимы с почти периодическими изменениями парамет-
ров движения, с колебаниями типа биений, с нарастанием амплитуд колеба-
ний,
- режим падения листом или глубокого сваливания (Deep stall) и т.д.
Возможность потери устойчивости и управляемости движения при быстром
вращении по крену (Roll-coupled problem) у сверхзвуковых самолетов с вытянутым
эллипсоидом инерции и значительным уровнем поперечной аэродинамической ус-
тойчивости отмечена уже давно как в теоретических работах, так и непосредственно
в полете (5].
Одним из критических режимов движения, обусловленных взаимодействием
продольного и бокового движений, является режим инерционного вращения или
режим неуправляемого вращения самолета по крену (здесь предполагается, что тра-
ектория полета близка к горизонтальной) при значениях утла атаки, меньших кри-
тического по сваливанию. При этом вращение происходит, несмотря на нейтраль-
ное или противоположное вращению положение элеронов и руля направления.
В научной литературе используются и другие названия этого режима - аэро-
инерционное вращение, авторотация и др., что можно объяснить стремлением ав-
торов отразить в названии физическую природу этого режима.
Если не ограничиваться диапазоном относительно малых углов атаки
(а < 30°), то можно провести определенную аналогию между режимами инерцион-
ного вращения и режимами штопора, которые возникают на закритических углах
атаки а > 30'. В обоих случаях это режимы самовращения, различна только приро-
да аэродинамического момента, поддерживающего вращение. По разному выглядит
и траекторное движение. В штопоре на больших закритических углах атаки проис-
ходит интенсивное торможение и быстрый выход в равновесный режим снижения
по вертикальной спирали.
216
Все перечисленные типы движения могут быть связаны с бифуркационными
особенностями установившихся решений уравнений пространственною движения и
характером изменения их устойчивости.
На рис. 10.1 приведена диаграмма, где в плоскости основных кинематических
параметров, характеризующих пространственное движение самолета - угла атаки и
и угловой скорости вращения О, выделены области возникновения и сущеегвова
ния критических режимов движения.
О 10 20 30 40 50 60 И
Рис. 10.1
Области существования критичсскихрежимов.
Рис. 10.2
Пространственный маневр типа
"бочка".
На рис. 10.2, 10.3 изображено поведение
ционного вращения, сваливания и штопора.
самолета при возникновении инер-
Рис. 10.3 Сваливание и штопор самолета.
www. vokb-la. spb.ru
217
10.2 Вопросы подобия дри моделировании динамики штопора
Исследование штопора самолета с помощью свободно штопорящих дистан-
ционно управляемых моделей самолета в вертикальном потоке аэродинамической
трубы Т-Ю5 является важным элементом комплексного исследования штопора на-
ряду С расчетными методами и летными испытаниями натурного самолета [9].
Для правильного моделирования движения с помощью масштабированной
модели необходимо выполнить ряд критериев подобия. Их можно разделить на две
основные группы, отражающие соответственно аэродинамические и динамические
особенности полета.
Аэродинамическое подобие
Из уравнений течения следует |8], что для обеспечения тождественности без-
размерных коэффициентов аэродинамических сил с и моментов ш при одинаковых
изменениях кинематических параметров движения необходимо выполнить ряд хо-
рошо известных критериев аэродинамического подобия. В первую очередь, аэроди-
намическое подобие подразумевает геометрическое подобие самолета и его модели,
выполняемой в некотором масштабе М (отношение линейных размеров модели
и самолета /S определяется масштабом модели:
£
— =М). Для рассматриваемых в
t г
данном случае условий обтекания аэродинамическое подобие требует равенства для
модели и самолета таких известных параметров, как число Рейнольдса Re и число
Маха М. Для нестационарных движений требуется еще выполнение подобия по
числу Струхаля Sh = —- в случае периодических процессов, или по безразмерному
времени т
Vt
f
для апериодических процессов. Здесь £1 - характерная частота,
V - скорость движения, t - время, f - характерный размер модели или самолета.
Очевидно, что т является более общим критерием, чем Sh, и для периодического
процесса он может быть переведен в Sh. Равенство величин т для модели и само-
лета означает равенство относительных перемещений потока для модели и самоле-
та. Следует отметить, что среди критериев аэродинамического подобия в динамике
штопора, в связи с пренебрежимостью веса воздуха, не моделируют аэродинамиче-
ское число Фруда, которое входит в уравнения течения при моделировании дина-
мики течения весомой жидкости.
Динамическое подобие
Для получения критериев динамического подобия воспользуемся уравнения-
ми движения в векторной форме, записанными относительно связанных с самоле-
том осей OXYZ
J — + и х Jw = М,,
dt а
+ CD X h -- 0, |h| = 1,
(ЮЛ)
dt
где:
Ra - суммарный вектор аэродинамической силы и тяги двигателей,
218
Ма - полный вектор аэродинамического момента,
о - вектор угловой скорости,
h - орт местной вертикали,
J,m - тензор инерции и масса самолета,
g - ускорение свободного паления,
Н ~ высота полета.
Введем безразмерные переменные и ряд параметров подобия, которые будут
полезны при анализе условий динамического подобия движения. Переходя к без-
размерной форме записи, уравнения (10.1) принимают следующий вид:
dia ia dV . _ с ph
dr + V di + <а 2 Fr V2
(did id dV | _
-y- + у, л P * Л® = 111
di V dr)
(10.2)
y- + p® x b = 0 |h| = 1
dr
dH ia h
dr p
pSV „
г = t ---безразмерное время,
m
f
« = о — - вектор безразмерной угловой скорости,
ia - единичный орт, направленный вдоль вектора скорости,
- приведенная скорость полета,
- характерная скорость полета.
v^
v0
Vo
~ н
Н - - приведенная высота полета.
2m
ц - - - - относительная плотность самолета,
рЬг
, 4J
Jr - —у - приведенная матрица тензора инерции,
nV
2V2
Fr =-----число Фруда,
с - вектор безразмерных коэффициентов аэродинамических и газо-
динамических сил,
m - вектор безразмерных коэффициентов аэродинамического и газо-
динамического момента.
Динамическое подобие движения самолета и его модели как в установивших-
ся режимах штопора с постоянными параметрами, так в переходных процессах бу-
дет иметь место, если в обоих случаях будут идентичны безразмерные параметры
подобия, входящие в уравнения (10.2) - ц., Jr, Fr. Под масштабом модели М будем и
здесь понимать отношение линейных размеров модели f1 и самолета / 2.
www. vokb-la. spb.ru
219
Таким образом, динамическое подобие требует соблюдения:
--огносигельной плотности самолета р, откуда вытекает соотношение ддя
массы модели (пц) и массы самолета (nij)
^=PL^3,
П12 р2
- приведенной матрицы моментов инерции Jr, подразумевающее идентичное
распределение масс модели по аналогии с натурным самолетом. С учетом
соотношения масс модели и самолета отношение их моментов инерции
можно выразить следующим образом
1.-Р±ЛР,
J2 р2
- числа Фруда, определяющего соотношение линейных и угловых скоростей,
Il = л/1/2, ^_.л/-1/2.
V2 СО 2
Отношение характерных времен, определяющих динамику переходных про-
цессов движения самолета и модели, (например, периодов колебаний) также опре-
деляется масштабом модели:
‘2
О совместимости критериев аэродинамического и динамического подобия
Совместное удовлетворение всех критериев аэродинамического и динамиче-
ского подобия для маломасштабных моделей (Л/ = -
1
16
используемых в аэро-
динамической трубе Т-105, практически невозможно. Поэтому очень важно созна-
вать последствия, возникающие от этого несоответствия.
Если полностью выполнены условия динамического подобия, то, как нетруд-
но проверить, автоматически будет выполняться и аэродинамическое подобие для
случаев неустановившегося обтекания по безразмерному времени или по числу
Струхаля. Как известно, выполнение подобия по безразмерному времени или
числу Струхаля очень важно на больших углах атаки для адекватного воспроизве-
дения. динамических эффектов отрывного обтекания (например, запаздывания в
установлении вихревых структур обтекания и т.д.)
Для штопорных движений харакшрна малая дозвуковая скорость снижения
самолета (М < 0,5). При этом, в принципе, поскольку штопор происходит на очень
больших углах атаки, например, в носке профиля крыла, могут образовываться ме-
стные около- или сверхзвуковые зоны. Но, как показывают расчетные и экспери-
ментальные исследования, в связи с наличием в этом случае развитого отрыва с
носка профиля эти зоны незначительно сказываются на аэродинамических харак-
теристиках. Таким образом, невыполнение подобия по числу М практически не
сказывается на характере штопора и выходе из него, и этим критерием можно пре-
небречь.
Чтобы удовлетворить подобие по числу Рейнольдса необходимо выполнить
условие:
220
Ml М2
где Mj,2 " коэффициент вязкости воздуха, зависящий только от температуры. Если
этой температурной зависимостью пренебречь и принять во внимание соотноше-
ния, которые следуют из выпот гения условий динамического подобия, то можно
получить следующие соотношения для масс и илогностей
£Ь_ = Л/3/2( Р±=Д/-3/2
ш2 Рз
Несложные оценки показывают, что обеспечить подобие по числу Рейнольд-
са в вертикальной аэродинамической трубе с открытой рабочей частью невозможно
(здесь мы не обсуждаем, в принципе, возможный метод повышения плотности в
рабочей части аэродинамической трубы).
Каковы же последствия нарушения этого критерия подобия? Отличие по
числу Рейнольдса может привести к заметному различию аэродинамических харак-
теристик в окрестности угла а гаки, соответствующему су тах , поскольку будет на-
рушен характер развития отрывного обтекания с гладких несущих поверхностей
(крыльев, стабилизатора и т.д.). Однако, штопорные движения происходят на зна-
чительно больших углах атаки, где реализуется практически полный отрыв потока,
и в этом случае аэродинамические характеристики практически не зависят от числа
Рейнольдса. Это связано с тем. что, как известно, влияние числа Рейнольдса на
аэродинамические характеристики реализуется на телах, главным образом, через
перемещение линии отрыва потока. Но на штопорных углах атаки отрыв формиру-
ется либо на острых кромках крыла и оперения, и, таким образом, линия отрыва
является фиксированной, либо вблизи носка профиля, имеющего достаточно ма-
лый радиус кривизны, что приводит к очень небольшим перемещениям линии от-
рыва потока. Эти обстоятельства приводят к тому, что число Re практически не
сказывается на аэродинамических характеристиках самолета на штопорных углах
атаки и на характере движения самолета в штопоре. Это подтверждается также
весьма хорошим соответствием результатов модельных и летных экспериментов по
характеристикам штопора и выхода из него по всем типам самолетов за примерно
пятидесятилетний опыт эксплуатации вертикальной аэродинамической трубы Т-
105.
www.vokb-la.spb.ru
221
10.3 Приближенные критерии сваливания
Как на стадии проектирования самолета, так и при доработке его аэродина-
мической компоновки широко используются приближенные критерии определения
углов атаки, при которых происходит сваливание самолета. Эти критерии следую г
из приближенных аналитических соотношений, определяющих условия устой низо-
сти и управляемости продольного и бокового движения самолета. Очень важно, что
такие условия достаточно просты и используют ограниченный набор данных аэро-
динамического эксперимента, получаемых традиционными методами.
Продольное движение
Сваливание по тангажу может быть связано с потерей устойчивости продоль-
ного движения. Величина угла атаки ctcB при этом может быть выбрана с некото-
рым запасом по отношению к границе потери устойчивости. Потеря устойчивости
может носить апериодический характер, как в случае "ложки" в моментной харак-
теристике (рис. 10.4) Превышение некоторого критического отклонения руля высо-
ты бВкрит приводит к резкому увеличению угла атаки, вследствие исчезновения ба-
лансировочного положения на малых углах гм аки.
222
Выход на большие утлы атаки в область развития отрывного обтекания может
привести к возникновению колебательной неустойчивости продольного движения,
вследствие потери аэродинамического демпфирования (рис. 10.5). В этом случае ве-
личина <хси может быть также выбрана с некоторым запасом по отношению к зоне
неустойчивости
Боковое движение
Рассмотрим упрощенные уравнения для быстрых составляющих бокового
движения, пренебрегая изменением скорости и подвижностью цешра масс самоле-
та под действием боковой аэродинамической силы и силы тяжести (с^ « 0, = 0),
а также изменением угла атаки и скорости V=const, a=const. При этом запишем их
относи! ельно скоростных осей OXaYaZa в безразмерной форме
dp _
dr
du mx . «’у
----—5- sm а + —- cos а,
dx ix 1у
dux m mv .
«. = соя а--- sin а ,
dr----------------1 х 1v
(Ю.З)
где
2 m
Ц pS/
dt
dr -----
- относительная плотность самолета,
m
Tm " pSV
- масштаб времени,
<°х/ й
w к- = ~2V ' ®езРазмерная Уповая скорость крена,
_ иу I
о У1 = ”2у~ " безразмерная угловая скорость по рысканию,
к . 1у
। _----*_— . =----------__ безразмерные моменты инерции.
ni(,/2)! т(//2)2
При оценке локальной устойчивости бокового движения можно ограничиться
линейным представлением аэродинамических коэффициентов.
, При этом система (10.3) примет следующий вид*
P " 0 0 ’ P ‘ 0
где d dx Wy - a21 a31 a22 a32 a 23 a33| 1 Bl Si X 1- a24 a34 5 , (10.4)
a2I = sin ct + m? — — cos a , a31 _ mx ггЛ - cos a —y2- sin a ,
a *y m*4 my a22 " ~— sin a + — cos a a32 П1?’ 1 = — cos a My*1 —— sin a ,
www.vokb-la.spb.
223
nT’K‘ , 1Пум’
a23 = —. — - sni a + —— cos a ,
*x ly
• mi
a24 sin a -i-- --- cos о ,
m?' m“'* .
азз “ ' cosa—. - suia ,
m* my
a34 •= - cos a---sin a .
’x 4
Собственные числа системы (10.4) определяются характеристическим уравне-
нием
Л3 + А2Х2 + Л2Х + Ао = 0 ,
коэффициенты которого следующим образом выражаются через аэродинамические
производные и безразмерные параметры самолета
а М f fi в* у I Ц
A j = - — mJ cos a + mJ sin a ~ I = - cp ,
*У X C
(10.5)
Ao = - . -г mjiri"” j
где f.o. обозначает вынужденные колебания (forced oscillations).
Поскольку параметр ц » 1, в выражении для А; отброшены члены, состоя-
щие из произведений вращательных производных. Аналогично принятому в литера-
туре определению для ор |6] в (10.1), введены еще два безразмерных параметра стри
о«. Все три безразмерные величины ар, ст() и <т„ будем называть коэффициентами
динамической устойчивости самолета в боковом движении.
Эти коэффициенты устойчивости достаточно просты для вычисления и опре-
деляются частными производными коэффициентов аэродинамического момента,
которые традиционно получают в аэродинамических экспериментах (см. таблицу
10.1).
Условия устойчивости возмущенного движения могут быть определены ал-
гебраическим критерием Рауса - Гурвица.
Ао > 0, А! > 0, А2 > 0, А2 At - Ао > 0.
Коэфф. Необходимые аэродинамические производные Метод эксперимента в АДТ
°* m“* f.o (a) = Го -г mJ sin a т“’ Го (а) = т'“у Го + mJ cosa Метод вынужденных коле- баний относительно осей ОХи OY
Ор mJ (а) mj(a) Статические испытания
О<0 т*1" (а) ni“'* (а), а также mJ и mJ Метод установившегося вращения
Табл. 10.1 Коэффициенты динамической устойчивости.
224
Эти соотношения приводят к следующим простым критериям устойчивое!и
<0, оц < 0, Ои < 0, (Ю.6)
СТрПр > -стм или ор < - -- .
°Р
Коэффициенты устойчивости a(j, ори о<„ так же, как и аэродинамические
производные, зависят от угла атаки и могут значительно изменяться на больших
углах атаки. Нарушение одного из условий (10.6) может служить критерием потери
устойчивости и, следовательно, возникновения сваливания, а угол атаки, при кото
ром это происходит, считаться углом сваливания ast.
Нарушение условий (10.6) приводит к качественно различным типам потери
устойчивости (см.рис.10.6).
Так, например, при нарушении только условия с,, происходит перемещение
действительного корня системы уравнений (10.4) в правую полуплоскость. При
этом критическая точка является точкой ветвления, в которой симметрично возни-
кают устойчивые равновесные режимы вращения, а сам исходный режим становит-
ся неустойчивым.
Нарушение условия орор > -сгш приводит к перемещению пары комплексно
сопряженных корней в правую полуплоскость, и если при этом не происходит
снижения частоты боковых колебаний о п ~ , то создаются предпосылки для
возникновения автоколебательного режима движения. Такая ситуация, в частности,
возникает при уменьшении модуля величины |стпг.
I р1
При изменении знака п|; переход комплексно-сопряженной пары корней в
правую полуплоскость сопровождается резким падением частоты колебаний од. ко-
торое может дополняться разбеганием корней по действительной оси и возникно-
вением точки ветвления (ои = 0). Из-за особенностей изменения основных аэроди-
намических производных mJ, 1Пу. ш“'* на больших углах атаки такое поведение
корней может происходить в узком диапазоне угла атаки Да ~ Iй * 2°, что делает
1m Си Re Lm ou= 0 Re
0 i
Im V <х.= '> Rc 1m X а„ = С 5“= 0 h -
)
Рис. 10.6 Потеря боковой устойчивости при
сваливании.
характер потери устойчивости движе-
ния близким к случаю ст,„ л 0.
Нарушение первых двух усло-
вий в (10.6) -ср < 0 и < 0 можно
считать признаками потери динами-
ческой устойчивости движения по
рысканию, нарушение же третьего
условия в (10.6) -с„ < 0 является при-
знаком потери устойчивости движе-
ния по крену или возникновения аэ-
родинамической авторотации.
Потеря устойчивости движения
по рысканию наиболее характерна
для маневренных самолетов недавне-
го прошлого с крылом изменяемой
геометрии и для современных само-
летов со стреловидным крылом мало-
го удлинения.
Потеря устойчивости движения
по крену характерна для самолетов с
крылом большою удлинения и Mwwivokb-la.spb.ru
225
сфсловидносги из-за возникновения при су = су явления аэродинамической ав-
торотации крыла, вследствие несимметричного развития отрыва потока на двух по-
ловинах крыла.
Критерии управляемости
Важным фактором оценки самолета летчиком является ею управляемость в
боковом движении. Традиционные органы управления - элероны, руль направле-
ния, дифференциальное отклонение стабилизатора, интерцептор - на больших уг-
лах атаки уже только условно можно разделить на органы поперечного и путевого
управления. Это связано с тем, что у всех этих аэродштамических органов управле-
ния возникают перекрестные аэродинамические моменты - т^.т*1, соизмеримые
с основными. Поэтому при их использовании на больших углах атаки управляемое
движение является существенно взаимосвязанным.
Привычная для летчика управляемость самолетом сохраняется, пока имеется
однозначная связь между отклонением элеронов и угловой скоростью вращения
(или угловым ускорением ©Vj).
Установившаяся величина угловой скорости (ох )с при небольших отклоне-
ниях органа управления б может быть оценена с помощью уравнения, определяю-
щего условия равновесия аэродинамических и инерционных моментов. Рассматри-
вая возмущенное управляемое движение, можно пренебречь действием инерцион-
ных моментов и нелинейных членов в полных уравнениях пространственного дви-
жения, поэтому отбрасывая в этих уравнениях высокие степени о , получим при-
ближенное соотношение:
(о (10.7)
где ов - -(m^ni® - m£my).
Таким образом, при сохранении устойчивости возмущенного движения по
крену (ст,„ < 0) реакция самолета при всех углах атаки будет однозначной, если будет
выполняться условие о6 < 0. Безразмерный параметр ос назовем параметром управ-
ляемости бокового движения. В англоязычной литературе аналогичный параметр
получил сокращенное название LCDP (Lateral Control Departure Parameter) |25p oj
- m* LCDP.
Этот параметр тесно связан с проблемой сваливания, поскольку обращение
реакции самолета по крену на отклонение элеронов, изменение знака (ой ) может
привести при пилотировании к развитию неустойчивых процессов.
Полученные выше приближенные критерии потери устойчивости и управ-
ляемости (см.табл.10.2) могут использоваться при оценке угла атаки, при котором
возможно сваливание самолета. Эта величина будет определяться наименьшим зна-
чением нулей функций, формирующих критерии сваливания.
226
Критерии Возможные изменения в динамике
а,„ - - mjm*’’ > 0 Апериодическая потеря устойчивости и вращение после сваливания (post-stall gyration)
R — ОрСУр-ол > 0, где op = iiij cos а + m‘x! since—- * X Колебания
nix' to +ns* fo p
________ ___________________ У
ор > 0 Пр >0 Апериодическая потеря устойчивости. Колебания
о5 = -(ni^m® - m£in*) > 0 Образная реакция на управление по крену. Апериодическая неустойчивость замкнугой системы самолет-летчик
Табл. 10.2 Критерии устойчивости и управляемости.
www. vokb-la. spb.ru
227
10.4 Особенности аэродинамических характеристик самолетов
на больших углах атаки
Аэродинамика самолета на больших (закритических) углах атаки и в штопоре
отличается отрывным характером обтекания элементов самолета и существенно не-
линейным характером их интерференции. Она является весьма сложной для изуче-
ния как расчетными, так и экспериментальными методами
Некоторые особенности аэродинамики самолетов различного типа на боль-
ших углах атаки и в штопоре, а также различные методы воздействия на вихревую
шруктуру обтекания с целью улучшения аэродинамических характеристик, характе-
ристик штопора и выхода из него рассматривались в работах J10], 114], ]15), 135],
J36]. Наряду с классическим штопором, порождаемым аэродинамической авторота-
цией крыла (фюзеляжа), в этих работах показано, что возникновение штопора мо-
жет быть обусловлено и рядом других аэродинамических эффектов, в частности,
несимметричным обтеканием носовой части фюзеляжа, нессимметричной вихревой
системой, индуцирующей значительные моменты рыскания на больших углах ата-
ки
10.4.1 Продольные аэродинамические характеристики
Самолеты общего назначения, как правило, являются устойчивыми при
а — 0, т.е. < 0. Основные требования к характеристике mz(ct) для самолетов
такого типа на режимах больших углов атаки и штопора сводятся к тому, чтобы:
- имелся запас на пикирование, достаточный для перевода самолета на ма-
лые углы атаки после остановки вращения;
- отсутствовали большие "ложки" в зависимости mz(a), поскольку’ наличие
"ложки" может способствовать попаданию самолета в штопор и создает за-
труднения для пилотирования;
- отсутствовали вторые балансировки на больших углах атаки;
- отсутствовали зоны антидемпфирования.
Рассмотрим типичные зависимости ш7(а) для аэродинамических компоновок
нескольких типов.
Аэродинамическая компоновка обычного типа
Рис. 10.7
Зависимость моментной характеристики
для компоновки классического типа.
Такая аэродинамическая компо-
новка, при достаточно низком рас-
положении стабилизатора, как правило,
имеет линейную зависимость m,(a) в
достаточно широком диапазоне углов
атаки (рис. 10.7). На ней достаточно
просто могут быть обеспечены значи-
тельные запасы момента на пикирова-
ние. Причем, вращение может заметно
увеличивать запас момента на пикиро-
вание па больших углах атаки (см. рис
10.7, со = ± 0,4), что способствует выхо-
ду самолета из штопора, или отсутствию
режимов штопора.
228
х Аэродинамическая компоновка с развитым наплывом крыла
Для такой аэродинамической компоновки характерно сохранение несущих
свойств наплыва крыла до очень больших углов атаки. Это приводит к возрастанию
момента на кабрирование и к появлению "ложки" в зависимости шДа) (рис. 10.8),
те области, где самолсг становится неустойчив в продольном канале. Увеличению
неустойчивости может способствовать также индуктивное воздействие вихревых
жгутов, сходящих с наплыва крыла, на горизонтальное оперение. Эти вихревые
жгуты создают между собой скосы, способствующие уменьшению местных углов
атаки стабилизатора, что также приводит к возрастанию момента на кабрирование.
Если горизонтальное оперение в этих аэродинамических копоновках расположено
не очень высоко, то, как правило, и для таких компоновок при надлежащей отра-
ботке форм наплыва и горизонтального оперения возможно достигнуть необходи-
мого запаса Лт/а) на пикирование (см рис 10.8). Некоторые методы воздействия
на продольные харакгерметики таких аэродинамических компоновок изложены в
[ 15| Эти методы заключаются.
- в ослаблении несущих свойств наплыва на больших углах атаки, например,
путем организации на части наплыва, прилегающей к фюзеляжу, перед-
ней кромки с нулевой стреловидностью (рис. 10.9,а),
- в увеличении размаха горизонтального оперения таким образом, чтобы сю
приконцевые сечения располагались вне вихревых жгутов, сходящих с на-
плыва; в результате, в этих концевых сечениях индуцируются скосы, спо-
собствующие увеличению момента на пикирование (рис. 10 9,6):
- если рассматривается крестообразное оперение с не очень высоко распо-
ложенным стабилизатором, то некоторого улучшения взаимодепст зия югн-
зонтального оперения с указанными вихревыми жгутами можно добиться
приданием ему некоторой отрицательной V-образности (рис. 10.9,б) 115]
Продольные характеристики для аэродинами-
ческой компоновки
с развитым наплывом.
Рис. 10.9
Некоторые методы улучшения продольных ха-
рактеристик компоновки с развитым наплы-
вом крыла
Лзродинамическая компоновка с крестообразным, Т - образным или
1Г- образным оперением
Характерная особенность Т-образного, П-образного или крестообразного ста-
билизатора заключается в его вредном взаимодействии с отрывным следом крыла.
При попадании стабилизатора в след резко уменьшаются его несущие свойства, чт0
приводит к сильному нарастанию момента на кабрирование и к появлению неус-
тойчивости в зависимости niz(a). Для этих аэродинамических компоновок при дос-
таточно высоком расположении стабилизатора, как правило, имеют место две ба-
лансировки самолета (рис. 10.10). Поскольку при попадании в отрывной след про-
падает также и эффективность руля высоты, то может оказаться, что такая аэроди-
намическая компоновка не сможет быть переведена на малые углы атаки, даже по-
сле остановки вращения.
Следует отметить, что в аэродинамических компоновках трехпланной схемы с
передним горизонтальным оперением, в частности, аналогичной изображенной на
рис. 10.10, неблагоприятную роль в образовании “ложки” в зависимости mz(a) мо-
жет играть горизонтальное оперение. Механизм образования “ложки” в этом случае
аналогичен интерференции наплыва крыла и горизонтального оперения на класси-
ческой аэродинамической компоновке с наплывом крыла (рис. 10.8).
Некоторого увеличения момента на пикирование для различного рода аэро-
динамических компоновок на больших, штопорных углах атаки, как правило, уда-
ется достичь установкой двух подфюзеляжных гребней в хвостовой части фюзеляжа
(рис. 10.16). Это увеличение обусловлено возрастанием в этом случае сопротивления
хвостовой части в результате ее обтекания потоком Vsina.
Влияние П-образного оперения на продольные характеристики
230
10.4.2 Боковые аэродинамические характеристики ,
10.4.2.1 Поперечная и путевая устойчивость
Для оценки устойчивости бокового движения модели самолета при экспери-
ментальном исследовании в аэродинамической трубе очень удобно использовать
приближенные критерии, приведенные в разделе "Приближенные критерии свали-
вания". Так, например, критерий сгр может использоваться при проведении статиче-
ских испытаний, критерий g,.> - при проведении испытаний методом установивше-
гося вращения, критерий о^- при испытаниях методом вынужденных колебаний
Наиболее часто используемым критерием является первый из них.
На основе расчетных и экспериментальных исследований, а также исследо-
ваний по полунатурному моделированию, выполненных на пилотажных стендах в
ЦАГИ, установлено, что для обеспечения устойчивости необходимо (но недоста-
точно), чтобы во всем диапазоне летных углов атаки, включая штопорные, вели-
чина ор < -0,005. Наиболее простым решением для обеспечения приемлемых харак-
теристик статической устойчивости по крену и рысканию можно использовать ус-
ловия: mJ <0, ш‘< 0 во всем диапазоне углов атаки, включая штопорные.
Изменение характеристик ш£, mJ и ор по углу атаки для аэродинамической
компоновки обычной схемы приведено на рис.10.11. Можно видеть, что в окрест-
ности а ' 20 имеет место потеря устойчивости по крену, а при а > 60 имеет место
путевая неустойчивость. При этом аэродинамическая компоновка имеет приемле-
мые характеристики по критерию ор во всем диапазоне а — 0 ч- 90’. Потеря устойчи-
вости для этой аэродинамической компоновки по производной mJ связана с нали-
чием небольшой стреловидности крыла по передней кромке. Она обусловлена бо-
лее ранним появлением отрыва при наличии скольжения на крыле, идущем вперед,
для которого угол скольжения относительно передней кромки уменьшается. При
этом при а ~ 20° имеет место нарастание путевой статической устойчивости. Потеря
путевой устойчивости при а > 60 на рассматриваемой аэродинамической компо-
новке обусловлена попаданием вертикального оперения на этих углах в отрывной
след от фюзеляжа и горизонтального оперения.
Поскольку некоторые самолеты общего назначения имеют развитые наплы-
вы крыла, приведем пример изменения характеристик боковой устойчивости для
такого рода аэродинамических компоновок (рис. 10.12). Дтя этой аэродинамической
компоновки характерна потеря поперечной и путевой устойчивости на углах атаки
а * 20 ~ 40°. Основная причина потери устойчивости по крену (рис. 10.12), в данном
случае заключается в.следующем. Вихревые жгуты, сходящие с носовой части фю-
зеляжа, объединяются с наплывными вихревыми жгутами, причем, с наветренной
стороны эти вихревые жгуты приближаются к плоскости симметрии крыла, а с
подветренной - отдаляются от нее, распространяясь вдоль подветренной консоли
крыла. В результате образующегося под вихревыми жгутами разрежения развивает-
ся дестабилизирующий момент крена, увеличивающий скольжение. Кроме того,
потеря устойчивости по крену и рысканию, в данном случае, обусловлена взаимо-
действием наветренного вихревого жгута с вертикальным оперением. Это взаимо-
действие заключается в том, что под действием набегающего потока между крылом
и горизонтальным оперением наветренный вихревой жгут поднимается над верти-
кальным оперением, приближаясь к его плоскости, а подветренный - отдаляется от
него. В результате, на вертикальном оперении индуцируются скосы, способствую-
щие увеличению дестабилизирующих моментов крена и рыскания. Эксперименты
показали, что снятие вертикального оперения в этом случае увеличивает устойчи-
www.vokb-la.spb.ru
вость по крепу и рысканию.
231
РисЛО II Боковые аэродинамические производные для самолета обычной схемы
Обычный наплыв крыла,
исходная модель
Обычный наплыв крыла. Вихри носовой
части и наплыва крыла объединены.
Рис 10 12
232
В ЦАГИ накоплен большой оньп по различным аэродинамическим компо-
новкам, и развты различные методы воздеис1вия на характеристики боковой ус-
^Йчивости летательных аппаратов с целью их улучшения Решение проблем улуч-
шения боковой устойчивости самолета может вестись как путем поиска соответст
вующсн аэродинамической компоновки и оптимизации взаимодействия ее отдель-
ных элементов, так и путем отрабоют местной аэродинамики отельных ъчеметов
самолета
Воздействовать на поперечную усгоичивос!ь обычной схемы с цечыо ее
улучшения возможно следующим образом
- уменьшением стреловидности крыла по передней кромке, делая ее нулевой
или даже придавая передней кромке небольшую обратную стреловидность,
- увеличением угла V-образности крыла
Весьма хорошими характеристиками поперечной устойчивости обладают, на-
пример, аэродинамические компоновки с высокорасположенным прямым крылом
(рис 10 13) и аэродинамические компоновки типа биплана (рис 10 14)
Для аэродинамической компоновки, изображенной на рис 10 12, существен-
ного улучшения поперечной и путевой устойчивости можно добиться организацией
на нал 1ыве небочьшого выреза в об части стыка наплыва с фюзепяжем (так назы-
ваемый, Х-наплыв крыла) Х-наплыв приводит к разделению вихревых ж!утов, схо-
дящих с носовой части фюзеляжа и наплыва, и, тем самым, оставлению указанного
негативного воздействия этих объединенных вихревых жгутов на поперечную и се-
тевую статическую устойчивость (рис 10 15)
Различные методы воздействия на характеристики поперечной статической
устойчивости аэродинамических компоновок с развитыми наплывами и трапецие-
видными или треугольными крыльями подробно рассмотрены в работе ! Id] 1 ам Ж',
рассмотрены методы воздействия на об части 'взрыва' вихревых жгутов с целью
улучшения характеристик поперечной статической устойчивости
Рис 10 13 Характеристики боковой устой-
чивости моноплана с высокорасло-
ложенным прямым крылом
Рис 10 14
Характеристики боковой устойчивости
биплана www.vokb-la.spb.
233
Потеря путевой статической устойчивости на больших углах атаки и в rui0_
поре может быть обусловлена неудачным взаимодействием вертикального оперения
с вихревыми структурами, сходящими с других элементов самолета. Это, в частно-
сти, происходит из-за: попадания вертикального оперения в отрывной след, иду-
щий от фюзеляжа или горизонтального оперения; вредного индуктивного воздейст-
вия вихревых жгутов, сходящих с различных элементов самолета, на вертикальное
оперение.
Для улучшения путевой статической устойчивости необходимо, по возможно-
сти, избегать этого негативного взаимодействия. Ослабить это взаимодействие в
некоторых случаях для обычной аэродинамической компоновки самолета с обыч-
ной компоновкой вертикального и горизонтального оперения возможно:
- сдвижкой горизонтального оперения вперед, так чтобы на больших, што-
порных углах атаки большая часть вертикального оперения находилась вне
отрывного следа стабилизатора;
- сдвижкой горизонтального оперения назад, что может привести к эффек-
там, изложенным выше ;
- уменьшением толщины фюзеляжа в прихвостовой его части.
Добиться некоторого увеличения путевой устойчивости на таких режимах
возможно также путем наращивания площади вертикального оперения в областях,
где оно незатенено отрывом.
наплыв крыла, вихри носовой части
фюзеляжа и наплыва крыла разъединены
Рис. 10.15
Эти вопросы также тесно связаны с увеличением эффективности руля на-
правления и более подробно изложены в разделе, посвященном эффективности ор-
ганов управления.
Увеличить путевую устойчивость возможно также посредством установки од-
ного или двух гребней в хвостовой части фюзеляжа (рис. 10.16).
234
Рис. 10.16
Увеличение путевой устойчивости за счет установки подфюзеляжных гребней.
Существенного улучшения взаимодействия горизонтального и вертикального
оперения и, тем самым, повышения путевой устойчивости можно добиться приме-
нением крестообразного, Т-образного или П-образного оперения. Однако, следует
иметь в виду, что характеристики продольной устойчивости и управляемости могуг
быть при этом существенно ухудшены (см. разделы "Эффективность органов управ-
ления" и "Продольные аэродинамические характеристики").
Как показывают экспериментальные исследования, весьма хорошие характе-
ристики путевой статической устойчивости имеют, как правило, аэродинамические
компоновки с вертикальным оперением в виде шайб, развитых вниз на концах ста-
билизатора, а также компоновки с V-образным оперением (рис. 10 37).
Высокая эффективность вертикального оперения в этом случае обусловлена
ослаблением или практически отсутствием вредного взаимодействия вертикального
оперения с другими элементами самолета.
Следует отметить, что на путевую устойчивость можно положительно влиять
не только описанными выше методами, которые связаны с увеличением стабилизи-
рующего путевого момента, образующегося в результате действия сил в хвостовой
части самолета. Увеличить путевую устойчивость на больших углах атаки и в што-
поре возможно приданием соответствующей формы носовой части фюзеляжа или
организацией соответствующего взаимодействия вихревых структур в носовой части
фюзеляжа. Например, на носовой части эллиптической формы, в результате ее об-
текания при скольжении, реализуется меньшая боковая сила, чем на цилиндриче-
ской, что приводит к меньшему значению дестабилизирующего момента от но-
совой части, т.е. к возрастанию стабилизирующего путевого момента. Это
связано с тем, что на цилиндре при наличии скольжения происходит большое пе-
ремещение линий отрыва и, соответственно, возрастает боковая сила AZ
(рис. 10.17,а) На эллиптической носовой части отрыв потока происходит вблизи
точек максимальной кривизны, в результате вихревая структура при наличии
скольжения оказывается более симметричной относительно плоскости симметрии
самолета, что приводит к меньшему значению боковой силы AZ.
www.vokb-la.spb.ru
235
Рис 10.17 Уменьшение боковой
силы и дестабилизирующего
путевою момента за счет
а) придания
эллишичносги се-
чениям носовой части
фюзеляжа,
б) установки ножевых
ребер I на носовой
части фюзеляжа.
Как показывают эксперименты, дестабилизирующую силу, реализующуюся
даже на цилиндрической носовой части, можно существенно уменьшить, если
вдоль носовой части или в ее вершине установить генераторы вихрей в виде ноже-
вых ребер (рис. 10.17,б). Установка таких генераторов вихрей приводит к фиксации
линий отрыва потока и, тем самым, к некоторой симметризации структуры течения
и уменьшению дестабилизирующей силы AZ, и, следовательно, к возрастанию пу-
тевой устойчивости [15].
10.4.2.2 Аэродинамическая авторотация
Аэродинамическая авторотация
Аэродинамическая авторотация, возникающая при ор > 0, как правило, поро-
ждается нелинейными особенностями отрывного и вихревого обтекания самолета
на больших углах атаки. Наиболее известным примером аэродинамической авторо-
тации является авторотация прямого крыла в диапазоне углов атаки, соответствую-
щих сУтм. При вращении крыла из-за возникающих скосов потока на правой и ле-
вой половине крыла происходит несимметричное развитие отрыва потока, которое
и провоцирует возникновение подкручивающего момента по крену (см.на рис. 10.22
характеристику гл"*) На больших углах атаки а - 50- 70’ аэродинамическая авто-
ротация может возникать из-за влияния вихревых систем и отрывного обтекания не
только крыла, но и фюзеляжа, и вертикального оперения и, как правило, проявля-
ется по рысканию.
Эффективных расчетных методов для таких режимов обтекания компоновки
самолета в настоящее время практически нет, и подобные явления исследуются
экспериментальными методами Тем не менее, можно отметить появление прибли-
женных инженерных методик для расчета авторотационных характеристик компо-
новки самолета с крылом большого удлинения, которые дают хорошие качествен-
ные результаты и хорошее согласование с результатами эксперимента.
Это, в частности, подход, использующий метод нелинейной несущей нити
для расчета отрывного обтекания крыла большого удлинения. Он позволяет рас-
сматривать задачу как в стационарном, так и в нестационарном случае, включая И
гистерезисные эффекты [30].
Разработанная методика позволяет рассчитывать аэродинамические характе-
ристики при симметричном обтекании крыла и при его движении по крену. На
рис. 10.18 показаны результаты расчетов для момента крепа, действующего на кры-
236
л0 с удлинением А =5 . в диапазоне углов aiaKH а = 14" - 20’ и при различных зна-
чениях ох. Видно, что существует ограниченная область в плоскости параметров (а,
в которой тх > 0, и для которой будет наблюдаться авторотация крыла. На рис.
10 20 приведены примеры расчет распределения по размаху крыла безразмерной
циркуляции и координаты точки отрыва в сечении.
Особенности обтекания крыла в установившемся штопоре
061 екание крыла на режимах штопора сопровождается сложными отрывны-
ми явлениями При этом вихревая ст рук i ура свободных вихревых жгутов, сходящих
с крыла, во многом аналогична вихревой структуре винта, например, несущею
ъинта вертолета, работающего на режиме вертикального спуска, или ветряка |36|
Рассмотрим плоский штопор, для которого, как правило, радиус R=0 Пусть
на крыло набмает невозмущенный поюк со скоростью V, и оно coBcpuaei враще-
ние с угловой скоростью cd (рис. 10.20)
Построим треугольники скоростей, набадающих на профиль наступающей и
отступающей консоли крыла. Через
2
обозначим линейную скорость набетающе-
го потока, обусловленную вращением крыла, £ - размах крыла Кроме скоростей V
в треугольниках скоростей учтем еще скорости, индуцированные вихревой
пеленой или. в каком-то приближении, вихревыми жгутами и П, сходящими с
концов крыла. Эти вихревые жгуты отходят от плоскости вращения крыла прибли-
2V
зительно под углом cp=arctg( — ) и следую! вдоль цилиндрическом поверхности ра-
ю/
диуса - (рис. 10.20.6) по винтовым линиям. Они индуцируют внутри вихревой ко-
лонны вертикальную скорость иу, направленную против скорости V. и окружную
скорость о0, направленную против вращения. Поскольку в штопоре С = 0.1 0,4.
то угол о является достаточно большим и может составлять величину 7 О - 80 , по-
этому следует ожидать, что окружные скорости по, индуцированные этими вихре-
выми жгутами внутри вихревой колонны, существенно больше, чем вертикальные
иу. Полный вектор скорости, набегающий на профиль, обозначим через W. Истин-
ный угол атаки профиля по отношению к скорости набегающего потока W обознд-
чим через а,.
Как видно из треугольников скоростей, на левой отступающей консоли кры-
ла угол атаки профиля, в результате наличия вращения и скоростей, индуцирован-
ных вихревыми жгутами, увеличивается и составляет а, = а + 5, а на наступающей
консоли крыла - уменьшается и составляет а, = а - 5 Это может приводить к тому,
что проекция Q* на плоскость, перпендикулярную оси штопора, полной аэродина-
мической сизы Q, определяемой из параллелограмма силы сопротивления cXj и
подъемной силы cyj, на отступающей консоли крыла будет меньше, чем на насту-
пающей. Разность этих сил будет вызывать момент, раскручивающий крыло отно-
сительно оси штопора.
www. vokb-la. spb.ru
237
Рис. 10.18
Аэродинамическая авторотация прямого
крыла.
Рис. 10.19
Расчет распределения циркуляции и зо-
ны отрыва при вращении крыла.
Ъ)
Рис 10 20 Аэродинамические силы и вихревая схема крыла в плоском штопоре.
238
Рис. 10.21 Вихревая структура крыла при спиральном движении R/0.
В установившемся штопоре, если рассматривать штопор собственно изолиро-
ванного крыла, распределение этих проекций Q* должно быть таким, чтобы аэро-
динамический момент был равен нулю. В установившемся режиме штопора, на-
пример, полной аэродинамической компоновки самолета с фюзеляжем и килем,
этот момент, образующийся в результате действия проекции сил Q*, может уравно-
вешиваться демпфирующим действием (моментом от силы сопротивления враще-
нию) фюзеляжа и вертикального оперения.
Для рассмотренного случая можно ожидать, что подъемная сила крыла на
наступающей консоли будет меньше, чем на отступающей (рис. 10 20,6). Это долж-
но вызывать появление соответствующего момента крена, который в установив-
шемся штопоре должен компенсироваться инерционным моментом
Аналогичная схема имеет место для случая, когда радиус R штопора удовле-
творяет условию /72 > R > 0 (рис. 10.21,а).
Если же R > £/2, то вихревые жгуты Г] и Г? проходят, как и в предыдущем
случае, по двум цилиндрическим поверхностям (рис. 10.21,6), при этом вихревой
жгут Г?, также как и Гь индуцирует окружную скорость uq, направленную против
вращения.
Приведенная схематизация течения показывает, что внутри вихревой колон-
ны индуцируются окружные скорости uq, направленные против вращения самолета.
Наличие этой дополнительной индуктивной скорости может существенно
увеличить разницу в углах атаки на наступающей и отступающей консолях крыла,
то есть усиливать эффекты, обусловленные собственно самим вращением.
Следует также отметить, что вне вихревой колонны вихревые жгуты индуци-
руют скорости, направленные по вращению самолета. www.vokb-la.spb.ru
239
Безусловно, здесь была использована сильная схематизация течения. РеаЛь-
ное обтекания крыла в штопоре сопровождается явлениями отрыва с его поверхно-
сти, при этом вихревые жгуты могут быть достаточно "толстыми” образованиями,
сходящими не с самых концевых сечений. Из сказанного очевидно, что существуют
некоторые оптимальные cool ношения между размахом крыла и выносом верти-
кального оперения, при котором оно будет эффективно демпфировать вращение
самолета. При установке вертикального оперения внутри вихревой колонны на нею
будут действовать значительные дополни! ельные окружные скорости, индуциро-
ванные этой вихревой колонной и направленные против вращения самолша. Тем
самым, демпфирование вращения будет возрастать.
Напротив, слишком большой вынос вертикального оперения може! уменьшить
демпфирование вращения вследствие того, что вне вихревой колонны индуцируют-
ся окружные скорости, направленные в сторону вращения самолета
Характеристики демпфирования вращения
Характеристиками демпфирования вращения являются производные от ком-
понентов моментов по полной угловой скорости вращения или про-
изводные по ее компонентам ш"ж,1п“у,т“ж, , итд. Приближенным парамет-
ром, характеризующим апериодическую потерю устойчивости вращательного дви-
жения, является параметр с,„ (см. раздел "Приближенные критерии сваливания").
Дтя того, чтобы при отсутствии несимметричных моментов отсутствовали ус-
тановившиеся режимы штопора, необходимо, чтобы < 0.
Для проверки и отработки аэродинамических компоновок по критерию сгш в
ЦАГИ используется методы экспериментальных исследований с установившимся
вращением моделей (установка Ш-5, см. раздел 10.6.1.2).
Добиться демпфирования вращения во всем диапазоне углов атаки по всем
трем осям так, чтобы всегда ш®’ < 0, т“у < 0, т®1 < 0, крайне затруднительно.
При этом следует иметь в виду, что устойчивость по параметрам ш®' и т“', на
обычных (не штопорных) углах атаки означает, что аэродинамическая компоновка
не склонна к развитию вращательного движения, которое может перейти в штопор
Увеличение устойчивости по параметру т®1 на таких не очень больших углах ата-
ки способствует сопротивляемости перехода самолета на большие углы атаки. На
штопорных углах атаки увеличение устойчивости по параметрам т®’ и m“v спо-
собствует прекращению вращения самолета. Увеличение же устойчивости по пара-
метру может препятствовать быстрому переводу самолета на малые углы атаки.
На рис. 10.22 приведены для примера характеристики демпфирования самоле-
та обычной схемы. Видно, что на штопорных углах атаки а > 50“ имеет место зна-
чительная неустойчивость по параметру . Неустойчивость по параметру т“у
обусловлена попаданием вертикального оперения в отрывной след от фюзеляжа и
стабилизатора.
Для плоских штопоров с углами атаки а > 60°, вывод из которых особенно
затруднителен, как показывает опыт экспериментальных и расчетных исследова-
ний, сильнейшее влияние на остановку вращения в штопоре оказывает увеличение
демпфирования по параметру ш“* (или ш“ ). Как показывают эксперименты, уве-
личение площади вертикального оперения в его верхней части для данной схемы не
дает заметного увеличения демпфирования из-за того, что вертикальное оперение
находится в отрывном следе от фюзеляжа и горизонтального оперения.
240
+ без подфкиеляжною |ребня
“ с подфюзеляжным гребнем
Боковые аэродинамические производные демп-
фирования вращения.
Для повышения демпфирования по параметру т“* (или т“ ) применяются
различные методы. Это, в частности, установка одного или двух подфюзеляжных
гребней (по типу показанных на рис. 10.16) в хвостовой или носовой частях фюзе-
ляжа. Причем, следует иметь в виду, что установка таких гребней в носовой части
фюзеляжа может ухудшить путевую статическую устойчивость по углу скольжения.
Значительного увеличения демпфирования вращения относительно оси OY можно
добиться применением такого вертикального оперения, чтобы оно находилось не в
отрывном следе, а практически в невозмущенном потоке. Вертикальное оперение в
виде низкорасположенных шайб на концах стабилизатора или применение V-
образного оперения (рис. 10.37), которые находятся практически в невозмушенном
потоке, сильно увеличивают такое демпфирование.
www. vokb-la. spb.ru
241
, 10.4.2.3 Аэродинамическая асимметрия
На больших углах атаки в отсутствии скольжения возможно существование
несимметричных вихревых езруктур обтекания симметричных элементов летатель-
ного аппарата, например, носовой части фюзеляжа, прямоугольного или треуголь-
ного крыла [11, 12, 13, 19] (рис. 10.23). Такая асимметрия (1-ый тип асимметрии)
может быть обусловлена неустойчивостью симметричных отрывных структур к ма-
лым возмущениям, связанным, в частности, с малыми микронеровностями поверх-
ности (рис. 10.23, а,б). При этом возможно существование нескольких устойчивых
состояний несимметричного вихревого обтекания (рис. 10.23,в).
Указанная асимметрия отрывного обтекания может вызывать появление
Рис. 10.23
Несимметрия вихревых струк-
тур при симметричных внеш-
них условиях обтекания:
а) появление момент рыскания
из-за несимметрии линии от-
рыва на носовой части само-
лета;
б) появление момента крена и
рыскания из-за несимметрии
отрыва на прямом крыле;
в) моменты крена на тре-
угольном крыле из-за суще-
ствования несимметричных
устойчивых вихревых струк-
тур; подобные вихревые
структуры могут реализо-
ваться и на удлиненных но-
совых частях фюзеляжа ци-
линдрического сечения.
больших моментов крена и рыскания, реализующихся собственно на самих рас-
сматриваемых элементах. Кроме того, эти несимметричные вихревые структуры мо-
гут, следуя вниз по потоку, взаимодействовать с другими элементами летательного
аппарата, например, килем и вызывать еще появление дополнительных моментов
крена и рыскания для симметричной конфигурации летательного аппарата (в от-
сутствии скольжения и при неотклоненных органах управления).
От рассмотренного выше типа асимметрии следует отличать асимметрию,
обусловленную установкой на отдельных элементах летательного аппарата, казалось
бы, малых выступающих элементов конструкции (например, антенн), которые при
установке их в определенных местах moivt провоцировать развитие несимметрггч-
ных вихревых структур и появление больших моментов рыскания или крена (2-ой
тип асимметрии). В исследованиях ЦАГИ [14, 15, 18, 35] установлено, что такими
242
Рис 10.24
Влияние симметризации малых геометрических
надстроек
ганах управления может вызывать:
областями являются зоны нача-
ла формирования вихревых жгу-
тов: носовая часть, область сты-
ковки крыла и фюзеляжа, на-
плыва и крыла.
На рис. 10.24,а для при-
мера показано развитие несим-
метричного отрыва на носовой
части фюзеляжа самолета в ре-
зультате несимметричного рас-
положения на ней штанги при-
емника воздушного давления
(ПВД), что вызывает появление
большого момента рыскания.
Существование больших
моментов крена и рыскания в
отсутствии скольжения на аэродинамической компоновке при неотклоненных ор-
- сваливание самолета,
- авторотацию,
- штопор самолета.
Несимметричные моменты требуют больших дополнительных расходов орга-
нов управления. Кроме того, величина этих несимметричных моментов может быть
такова, что они не смогут быть сбалансированы отклонением соответствующих ор-
ганов управления.
Поэтому при проектировании и отработке аэродинамической компоновки
необходимо добиваться, по возможности, отсутствия указанной несимметрии в аэ-
родинамических характеристиках.
Асимметрии 2-го типа можно избежать, если в указанных областях зарожде-
ния и прохождения вихревых образований соблюсти полную геометрическую сим-
метрию летательного аппарата, включая мельчайшие надстройки (типа антенн,
ПВД и т.д.). Примером ликвидации такой аэродинамической асимметрии может
служить случай с самолетом, описанный в 1151. В первоначальном варианте на его
носовой части с левой стороны была установлена штанга ПВД, что вызвато по ти-
пу рис. 10.24,а появление большого момента рыскания и обусловливало существо-
вание плоского правого штопора, выход из которого не мог быть осуществлен при
любых отклонениях органов управления.
После того, как симметрично основной штанге ПВД с правой стороны была
установлена штанга аварийного ПВД (рис. 10.24,6), то структура течения симметри-
зовалась, а в этой конфигурации несимметричный момент рыскания отсутствовал.
Это привело к тому, что для самолета такой конфигурации режим штопора при
нейтральных органах управления отсутствовал.
Ликвидировать асимметрию 1-го типа в общем случае сложнее, поскольку
она обусловлена природой отрывных течений. В ЦАГИ развиты различные приемы
и методы ликвидации такой асимметрии. В частности, симметризовать линию от-
рыва и обтекание носовой части фюзеляжа в значительном диапазоне углов атаки
позволяет установка небольших ребер по бокам носовой части фюзеляжа
(рис. 10.25).
www. vokb-la. spb.ru
243
!t?
Рис.10.25
Ликвидация асимметрии об-
текания посредством уста-
новки небольших ребер.
Vsina
Для примера на рис. 10.26 приведены зависимости mx(a) и mv(a) для аэроди-
намической компоновки с высоко расположенным прямым крылом. Видно появ-
ление больших значении моментов крена и рыскания на углах атаки о 20 25'
причем, они сохраняю 1ся даже при любом скольжении. Несимметрия на этих углах
может способствовать режиму сваливания На рис. 10.27 приведены изменения
шк(о) и my(a) для самолета с низко расположенным крылом. Видна значительная
асимметрия в моментах на штопорных углах атаки а * 50 - 60" На рис 10 28 пока
зана асимметрия на штопорных углах атаки в характеристике my(a) для самолета
выполненного по схеме бесхвостка. Видно, что значительная асимметрия сохраня-
ется даже при наличии скольжения. Из рис. 10.29 видно, что асимметрия на этих
углах атаки сохраняется и при наличии вращения того или иного знака.
Появление несимметричных моментов крена и рыскания при a & 50 -е- 60° на аэро-
динамической компоновке с низко расположенным крылом.
Появление несимметричных моментов
крена и рыскания при a « 20’ на аэро-
динамической компоновке с прямым
высоко расположенным крылом.
Рис. 10.28
Асимметрия в характеристике my(a) на
углах атаки а « 50 - 65° для самолета,
выполненного по схеме бесхвостка.
Рис. 10.29
Влияние на асимметрию по рысканию
вращения самолета.
В ЦАГИ на основе анализа уравнений движения и многочисленных экспе-
риментальных исследований установлено, что аэродинамическая асимметрия в от-
сутствии отклонения органов управления является главной причиной штопора са-
молета. Полное устранение аэродинамической асимметрии является необходимым
требованием при создании нештопорящего самолета. Полное устранение аэродина-
мической асимметрии по моментам до такого уровня, когда она может быть пари-
рована органами управления, и, таким образом, вращение остановлено, является
важнейшей задачей при отработке аэродинамики самолета на больших углах атаки
и в штопоре. Это требование должно удовлетворяться во всем летном диапазоне
углов атаки, вплоть до a - 90°. Отработка этих вопросов в настоящее время произ-
водится экспериментально в аэродинамических трубах путем проведения весовых
измерений с последующим расчетом режимов движения самолета или в свободном
штопоре в вертикальной аэродинамической трубе. www
245
(44
10.4.3 Эффективность органов управления
Обеспечение надлежащей эффективности органов управления по крену, тан-
гажу и рысканию на штопорных углах атаки является первостепенной задачей, по-
скольку, как правило, только при необходимом уровне эффективности этих орга-
нов управления самолет может быть выведен из штопора.
Отрывное обтекание, реализующееся на больших углах атаки или в штопоре,
вызывает резкое уменьшение эффективности традиционных органов управления
вплоть до появления их обратной (по отношению к малым углам атаки) эффектив-
ности. Кроме того, на больших углах агаки и в штопоре может иметь место сильное
взаимовлияние традиционных органов управления, чю обычно менее важно или не
имеет места на малых углах атаки.
Эффективность органов управления в сильной степени зависит от аэродина-
мической компоновки самолега в целом н компоновки собственно самих органов
управления.
Рис. 10.30
Управляемость по тангажу, крену и рысканию самолета нормальной схемы.
На рис. 10.30, для примера, показана эффективность органов управления са-
молета нормальной схемы. Видно, что на штопорных углах атаки а > 65’ обеспечи-
вается достаточно высокий уровень эффективности органов управления по тангажу
и крену. Эффективность руля направления при а ~ 50’ является достаточно низкой,
и на штопорных углах атаки а « 55 4-60’ имеет место его обратная эффективность.
Обратная эффективность руля направления в данной аэродинамической компонов-
ке обусловлена (рис. 10.31) отрывным обтеканием стабилизатора и связана с обра-
зованием в зоне А дополнительного разрежения, а в зоне В в результате перетека-
ния с задней кромки стабилизатора - дополнительного давления. Увеличение пло-
щади руля направления в этой конфигурации может дать лишь увеличение его об-
ратной эффективности. Как показывают эксперименты, добиться повышения эф-
фективности для хвостового оперения такого типа, можно следующими мероприя-
тиями:
246
Рис. 10.31
Интерференция руля направления и
- сдвижкой горизонтального оперения
вперед шк, чтобы на пи опорных уг-
лах атаки большая или значительная
часть руля направления не заменялась
отрывом с горизонтального оперения
(рис.10.32,а);
- некоторым перемещением стабилиза-
тора вверх таким образом, чтобы зна-
чительная часть руля направления не
находилась в зоне отрывного обтека-
ния (рис. 10.32,6),
- увеличением площади руля в нижней
его части (рис. 10.32,в).
Как показывает опыт, значительное
влияние на эффект явность руля направления
может оказывать наличие зазора "а" между
рулем направления и рулем высоты
горизонтального оперения:
зона А - дополнительное разрежение,
зона В - дополнительное давление.
(рис. 10.33). Наличие такого зазора заметно повышает эффективность руля направ-
ления на режимах штопора.
На эффективность руля направления на штопорных углах, при отсутствии
неблагоприятного воздействия стабилизатора, сильное влияние может оказывать ею
стреловидность ио передней кромке. Увеличение угла стреловидности руля направ-
ления может приводить к падению или полному отсутствию эффективности в ре-
зультате уменьшения составляющей скорости V,, перпендикулярной рулю направ-
ления (рис. 10.34,а), а при больших углах атаки к обратной эффективности
(рис. 10.34,6). В этом смысле более эффективным может оказаться руль направле-
ния. имеющий по четверти хорд обратную стреловидность (рис. 10.34,в), у которо-
го составляющая V , больше, чем при прямой стреловидности.
При этом следует иметь в виду, что сильное поднятие стабилизатора вверх
(например. Т-образный стабилизатор), может привести к ухудшению зависимости
mz(a) - к образованию "ложки", а также падению эффективности руля высоты
(см. об этом в разделе "Продольные аэродинамические характеристики").
Следует отметить, что такое же отрицательное воздействие на эффективность
руля направления в рассматриваемой схеме может оказывать и достаточно толстый
в хвостовой его части фюзеляж (рис. 10.35).
Рис. 10.32
Различные схемы увеличения
эффективности руля направления
на штопорных углах атаки.
www.vokb-la.spb.
247
Рис. 10.33
Возможный путь увеличе-
ния эффективности руля
направления.
Рис. 10.34
Зависимость нормальной составляющей скорости Vx
от угла стреловидности передней кромки руля на-
правления.
Для некоторых аэродинамических компоновок, имеющих большую площадь
руля высоты, или если стабилизатор выполнен цельноповоротным, в ЦАГИ выра-
ботан метод 114], 115] пилотирования, при котором для выхода из штопора реко-
мендуется сначала "давать ручку на себя", вместо естественного для пилота движс-
248
НИЯ -"о J себя”, поскольку при этом, вследствие реализации безотрывного обтекания
киля (или значительной его части), улучшается демпфирование по курсу и возрас-
тает эффективность руля направления (рис. 10.36).
Весьма высокий уровень эффективности руля направления на больших углах
атаки имеет место в аэродинамических компоновках, в которых рули направления
не затенены в результате интерференции с другими элементами самолета. К таким
аэродинамическим компоновкам следует отнести хвостовое оперение с шайбами на
Концах стабилизатора (рис. 10.37,а) и V-образное оперение (рис. 10.37,6).
а) б)
\\\ /77 Рис. 10.37
У'"'' ) \ // Компоновки хвостовой
у/ / f ь/ части самолета с высокой
/^ /-—^/ эффективное!ью руля на-
./ правления.
Обратимся теперь к эффективности в продольном канале. Для рассматривае-
мой на рис. 10.30 аэродинамической компоновки нормальной схемы с крылом
прямой стреловидности без развитых наплывов крыла с достаточно нижим распо-
ложением горизонтального оперения, на котором расположен руль высоты, эффек-
тивность его, как правило, является достаточно высокой. При этом необходимый
уровень эффективности, обычно, может быть достигнут путем простого увеличения
площади руля высоты.
В аэродинамических компоновках с Т-образным, П-образным или крестооб-
разным расположением стабилизатора, как указывалось в разделе "Продольные аэ-
родинамические характеристики", и при нс очень больших расстояниях 10 всегда
существуют области углов атаки, когда горизонтальное оперение попадает в отрыв-
ной след от крыла. Как показывают экспериментальные исследования, в этих об-
ластях углов атаки эффективность руля высоты, даже если он выполнен в виде
цельноповоротного стабилизатора, резко падает или равна нулю (рис. 10.10). Это
обстоятельство на режимах штопора может приводить к тому, что самолет не может
быть эффективно выведен из штопора. Обычно сложным случаем является наличие
второй балансировки в характеристике mz(ct) и отсутствие эффективности в про-
дольном канале (рис. 10.10), когда самолет не может быть переведен на малые углы
атаки даже после остановки вращения. Как показывают эксперименты, высокую
эффективность имеют рули, расположенные на V-образном оперении (рис. 10.37,6)
[14].
Достаточно высокая эффективность по крену для самолета с прямым крылом
на штопорных углах атаки может быть, как правило, достигнута применением
обычных элеронов или с помощью увеличения их площади. При этом следует
иметь в виду, что на больших углах атаки при отклонении элеронов могут возни-
кать значительные моменты рыскания (рис. 10.38). Появление момента рыскания
обусловлено разностью продольных сил в связанных с самолетом осях, реализую-
щихся в сечениях крыла, где расположены правый и левый элероны. На некоторых
самолетах элероны могут использоваться как закрылки (так называемое "всплытие"
или "зависание" элеронов). В случае реализации такого режима работы элеронов
для повышения их эффективности необходимо, чтобы их суммарный угол отклоне-
ния (как элерона и закрылка) не превышал 20 + 25'.
www. vokb-la. spb.ru
249
4- без вршцения
Возникновение моментов рыскания от отклонения
элеронов
Отработка эффектив-
ности органов управления
на больших углах атаки и в
штопоре должна прово
диться на весовых и сво-
бодно штопорящих моде-
лях в аэродинамических
трубах, с привлечением
расчетов динамики движе-
ния самолета на больших
углах атаки и в штопоре
Весовые эксперименталь-
ные исследования должны
проводиться в диапазоне
всех летных углов агаки,
включая штопорные (те а
= 0 90), как при нали-
чии вращения (установка
Ш 5), так и в его отсутст-
вии (установка Ш-4)
Потребный уровень
эффективности органов
управления на больших,
штопорных углах атаки по
всем каналам управления
зависит от целого ряда
факторов, таких как
- уровень асимметрии аэродинамических характеристик по крену и рысканию,
- характеристики устойчивости самолета по всем каналам,
- характеристики демпфирования вращения,
- соотношения моментов инерции самолета
Уровень эффективности может считаться приемлемым, если самолет имеет
удовлетворительные характеристики режимов штопора и выхода из него
10.4.4 Аэродинамический гистерезис
Одной из важных особенностей аэродинамических характеристик на больших
углах атаки является явление аэродинамического гистерезиса, порождаемого нели-
нейными свойствами отрывного обтекания элементов компоновки самолета
Гистерезис может иметь место при перестроении вихревых структур и оказы-
вать влияние, в первую очередь, на режимы сваливания и последние этапы выхода
самолета из штопора на малые углы атаки На больших углах атаки, где имеет ме-
сто развитый штопор, гистерезис в аэродинамических характеристиках, как прави-
ло, не имеет место и не оказывает влияния на движение самолета или его модели в
штопоре
Можно выделить, так называемый статический гистерезис, суть которого за-
ключается в возможности существования различных структур обтекания в стацио-
нарных условиях (двух или более) и, как следствие, неединственнои зависимости
аэродинамических нагрузок от кинематических параметров, например, таких как
угол атаки, угловая скорость и тд Зона неоднозначности или гистерезиса, порож-
250
даемою например, отрывом на крыле, существенно записи г от чисча Рейнольдса
В нестационарных условиях статическим гистерезис существенно трансформирует-
ся, расширяя зону неоднозначности нагрузок При этом ширина зоны гистерезиса
начинает значительно зависеть от числа Струхаля или же от амплитуды и частоты
колебаний в критическом зоне Явление динамического гистерезиса ярко проявля
стоя при колебаниях с большими амплитудами и высокой частоте даже при отсут
ствии статического тсгерсзиса Возникает эю явление вследствие эффекюв заши-
дывания развития отрыва на крыле или разрушения вихревых структур над крылом
при неустановившемся движении самолета Динамический гистерезис особенно
усиливается при одновременном увеличении угла атаки и уменьшении скорости
движения самолета, или, наоборот, при одновременном уменьшении у ла атаки и
разгоне самолета Естественно, эти особенности аэродинамики существенно влияют
на динамику сваливания самолета и выход с больших углов атаки и поэтому требу-
ют правильного их описания Ниже кратко описаны эти явления и возможное
влияние их на динамику самолета
10 4 4 1 Статический гистерезис
Статический гистерезис является следствием возможности существования при
одних и тех же кинематических параметрах различных устойчивых структур обтека-
ния, например, отрывной и безотрывной или отрывного обтекания с различными
зонами отрыва и топологией и тд В интегральных аэродинамических характери
стиках - в полных силе и моменте - аэродинамический гистерезис может прояв-
ляться в виде неоднозначных зависимостей
Для иллюстрации аэродинамического гистерезиса воспользуемся результата
ми работы 116], где, в частности, представлены экспериментальные данные иссле-
дования крыльев большого удлинения на больших углах атаки при дозвуковых ско
ростях (рис 10 39) Четко видно наличие статического аэродинамического гистере-
зиса в величине подъемной силы при изменении угла атаки в прямом и обратном
ходе в области отрыва и восстановления потока При этом наблюдается существен-
ная зависимость ширины петли гистерезиса от чиста Рейно тьдса в исследованном
диапазоне Re = 1,08 1 06 - 4 28 1 О’5 С увеличением числа Re диапазон безотрывного
обтекания при возрастании угла атаки расширяется а восстановление безотрывного
обтекания происходит практически при одном и том же угле атаки
В работе (17] приведены результаты исследования отрывного обтекания пря
Рис 10 39 Неоднозначность нестационарных произ-
Зависимость ширины зоны гистерезиса водных в °^ac™ статического гистерезиса
от числа Рейнольдса www.vokb-la.spb.ru
251
мых крыльев малого удлинения различной относительной толщины. Измерения
полного аэродинамического момента при прямом и обратном ходе показал и суще-
ствование статического гистерезиса, например, для крыла с относительной толщи-
ной с = 0,09 в диапазоне 17° < а < 21°. Визуализация потока показала, что безот-
рывное обтекание крыла сменяется отрывным обтеканием , при котором над кры-
лом возникает замкнутая зона с возвратным течением. Смена структуры течения
приводит к скачку в величине mz. Восстановление безотрывного обгекания проис-
ходит уже при меньшем значении угла атаки и также сопровождается скачком в
величине mz. На величину и положение зоны аэродинамического гистерезиса, ана-
логично влиянию числа Re, оказывает влияние в этом случае относительная тол-
щина профиля крыла На рис. 10.40 приведены зависимости нестационарной и
вращательной производной по тангажу, полученной методом вынужденных колеба-
ний с различной амплитудой. Наиболее резкое изменение этой величины происхо-
дит при охвате зоны статического гистерезиса.
Рис. 10.41
Статический гистерезис
в зависимостях тх(а),
ту(а) на прямоугольном
крыле, X = 5,0
В работах [12], [38] приведена и проанализирована существенная неодно-
значность вихревой структуры обтекания крыльев, X = 5.0 с различной относитель-
ной толщиной на режимах статического гистерезиса. При этом в 112J показана су-
щественная нсстационарность аэродинамических нагрузок при стационарных
внешних условиях. Продемонстрировано, что, наряду с появлением больших мо-
ментов крена и рыскания на таких углах атаки, может иметь место значительный
гистерезис не только в зависимостях Су(а), niz(a), но и в mx(a), my(a).
Таким образом, статический гистерезис может приводить к значительному
изменению всех аэродинамических нагрузок в зависимости от предыстории движе-
ния Поэтому тщательное изучение подобных явлений с целью перенесения мо-
дельного эксперимента на натуру и построения математической модели для адек-
ватного описания аэродинамических нагрузок при полете на больших углах атаки и
при сваливании представляется чрезвычайно важным.
252
10.4.4.2 Динамический гистерезис и особенности нестационарных аэродинамических
характеристик
При неустановившем ся движении самолета в окрестности углов атаки, соот-
ветствующих с>тм, наблюдаются значительные трансформации аэродинамических
нагрузок Су, niz по сравнению с их статическими зависимостями. Возрастание вели-
чины сУпш при этом пропорционально скорости возрастания утла атаки.
Определяющими факторами, влияющими на затягивание отрыва потока и его
восстановление, являются: уменьшение градиента статического давления при неус-
тановившемся движении с а > 0, способствующее предотвращению отрыва погра-
ничного слоя; эффект сноса вихрей, сходящих с передней кромки крыла, прояв-
ляющийся при больших значениях приведенной частоты со > 0.01 и т.д. Гипотеза
об идентичности улучшения пограничного слоя при нестационарном движении и
при увеличении числа Re подтверждается рядом экспериментальных фактов [28]
При этом делается допущение, что изменение величины су<^ (а ) при нсуслано-
вившемся движении может изменяться в пределах (сУти )rc-><v (Суп11< )н<-ль полу-
ченных в статических испытаниях. Возможность для динамического гистерезиса
имеется как при малых числах Re (в аэродинамических трубах), так и в условиях
полета при больших числах Re.
Вследствие запаздывания возникновения отрывного обтекания при неусгано-
вившемся движении с увеличением угла атаки может возникать значительное при-
ращение в величине су^>. При обратном направлении изменения утла атаки будет
сказываться эффект запаздывания восстановления безотрывного обтекания. Изме-
нения аэродинамических нагрузок, возникающие при неустановившемся движении
на больших углах атаки, естественно, будут оказывать значительное влияние на ха-
рактер возмущенного движения самолета в рассматриваемой области, в частности,
при сваливании. Для правильного описания аэродинамических характерисгик в
этой области необходимо учитывать динамические эффекты запаздывания возник-
новения и восстановления отрывного обтекания [29].
Динамический гистерезис в области углов атаки сУти наблюдается как в аэ-
родинамическом эксперименте, так и непосредственно в полете На рис. 10.42 при-
ведены примеры расчета изменения величины коэффициента подъемной силы при
различных амплитудах колебаний с частотой f=2 Гц и V=40 м/с [30].
Динамические эффекты развития отрывного обтекания крыла и нелинейная
аэродинамическая интерференция с горизонтальным оперением для нормальной
компоновки самолета может приводить к возникновению антидемпфировавия по
тангажу. На рис. 10.43 приведена характерная для этого случая1 зависимость ком-
плекса вращательной и нестационарной аэродинамической производной коэффи-
циента момента тангажа. Степень антидемпфирования существенно зависит от час-
тоты колебаний, при которых проводились испытания методом вынужденных коле-
баний.
Вследствие антидемпфирования у свободной по тангажу модели в аэродина-
мической трубе наблюдаются автоколебания со значительной амплитудой. При
этом можно видеть сильные изменения в величине подъемной силы по сравнению
с зависимостью, определенной в статических условиях (рис. 10.44).
Следует отметить сильное влияние на структуру течения и динамический гис-
терезис совместного изменения по времени угла атаки и скорости полета. Как по-
казано в [40], для профиля крыла динамический гистерезис в аэродинамических
харак1сристиках особенно велик при возрастании угла атаки а > 0 с одновремен-
ным быстрым торможением (V > 0). В [18] показано, что при а > 0, V < 0 про-
www,vokb-la. spb.
исходит также значительное усиление гистерезисных явлений в положении облае- '
чей взрывов вихревых жгутов на треугольном крыле, что должно приводить к сщц,.
ному динамическому гистерезису в аэродинамических нагрузках. При а < О, V >
О, наоборот, гистерезисные явления по сравнению со случаем а < О, V = const мо-
гут существенно ослабляться.
Су V; 40 м/с, b “0.4м, Х-5, a(t >-15°г &asin 2л f t, f=2 Гц
Антвдемфирование по тангажу.
Рис. 10.44
Автоколебание свободной
по тангажу модели самолета.
Рис. 10.42 Динамический гистерезис в коэффициенте подъемной силы.
254
10.5. Исследование динамики самолета в штопоре
с помощью ЭВМ
Расчетное исследование динамики самолета в штопоре может проводиться с
использованием как приближенных, так и полных математических моделей, что
позволяет при последовательном их применении дать достаточно полное представ-
ление об особенностях поведения самолета.
Одной из основных особенностей штопора является возможность существо-
вания нескольких различных режимов движения самолета при одних и тех же от-
клонениях органов управления. Это связано с неединственностью решений уравне-
ний движения, часть из которых может быть устойчивыми, часть - неустойчивыми.
Для изучения особенностей динамики они все представляют существенный инте-
рес. Поэтому одной из важнейших задач расчетного исследования является оты-
скание этих решений, равновесных или автоколебательных, и проведение анализа
их устойчивости.
Описание аэродинамических характеристик самолета на больших углах атаки
в условиях шюпорного движения строится на основе экспериментальных данных,
получаемых методами установившегося вращения и вынужденных колебаний. Осо-
бенности использования этих данных в наиболее удобной форме приведены ниже.
10.5.1 Описание аэродинамических характеристик самолета
При моделировании динамики самолета описание аэродинамических сил и
моментов традиционно строится на основе экспериментальных данных, получае-
мых в аэродинамических трубах. Используются различные экспериментальные ме-
тоды статических и динамических испытаний, целью которых является наиболее
полная реализация характерных форм пространственного движения модели самоле-
та и измерение соответствующих им изменений аэродинамических нагрузок.
При малых возмущениях и в условиях безотрывного обтекания или в услови-
ях развитого отрыва нестационарная аэродинамическая реакция пропорциональна
параметрам возмущенного движения, к которым относятся безразмерные величины
dbA BJ7
скорости изменения углов атаки и скольжения (а = = 2V ) 11 безразмерные
_ _ (DzbA
значения проекций угловой скорости (со х = » ®у = ю L = ~V поэтому
допустима следующая форма представления аэродинамических коэффициентов
> с, = с,(а,р,5)+с“хсок + + с“£й7 1-c“d + с^Р ,
in, = ш,(а,р,5) + т“хшх + т^сбу + т“'ш, + m^d + т^Р ,
i = х, у, z.
Зависимости т,(а, Р, б), с,(а, р, 5) на малых углах атаки близки к линейным. На
больших углах атаки возможно возникновение несимметричных аэродинамических
сил и моментов, которые в значительной степени зависят от предыстории движе-
ния, и для их описания требуется специальный подход.
В эксперименте, проводимом методом вынужденных колебаний, из-за кине-
матического взаимодействия измеряются неразделенные комплексы нестационар-
ных и вращательных производных аэродинамических коэффициентов
т"‘ вк = т“" + mj sina0 - m“ cosa0tgP0,
www.vokb-la.spb.
255
in J’ cosafi
2ЬЛ
m“ sina()tgp0,
(10.8)
m"’ BK = m“7 + in“.
i = x, y, z.
Аналогичные формулы справедливы и для коэффициентов аэродинамической
силы. Соотношения (10.8) упрощаются, если испытания проводятся при нулевом
значении угла скольжения Ро = 0.
Поскольку метод вынужденных колебаний при неподвижном положении
центра масс модели не позволяет получить раздельно значения вращательных и не-
стационарных производных, то при математическом представлении аэродинамиче-
ских коэффициентов допускается некоторая неточность, заключающаяся в замене
исходного представления упрощенным описанием
го, - in, cr (а,р.fi) + inк йх + к иу + пц ' к ,
i = х, у, z.
(Ю.9)
-Некорректность, возникающая при использовании (10.9), связана с неуче го м
подвижности центра масс в свободном полете под действием аэродинамической и
гравитационной сил, а также под действием ветровых возмущений [6]. В ряде слу-
чаев такой неточностью можно пренебречь. В большей степени это справедливо
при анализе бокового возмущенного движения, а также, когда нестационарные
производные малы.
Использование нестационарных и вращательных производных, получаемых
методом вынужденных колебаний в виде (10.8). наиболее уместно для условий по-
лета по почти прямолинейным траекториям, когда средняя величина угловой ско-
рости мала, а радиус кривизны траектории достаточно велик. При этом в качестве
невозмушенных значений аэродинамических сил и моментов естественно прини-
мать их значения, получаемые методом статических испытаний (10.9).
При выходе на большие углы атаки и быстром вращении самолета может
возникнуть значительное влияние угловой скорости на характер обтекания и вели-
чины аэродинамических сил и моментов. Мерой этого влияния может служить ве-
личина безразмерной угловой скорости и = (coXj - проекция полного векто-
ра угловой скорости на направление скорости полета), которая, например, в режи-
мах штопора и при полете с малой скоростью может достигать значений со < 0,4, в
то время как на виражах и пологих спиралях, а также при вращениях по крену на
больших скоростях полета она существенно меньше © < 0,02.
При полете самолета с интенсивным вращением радиус
ной траектории соизмерим с его линейными размерами R) r: <
кривизны спираль-
е
, при этом рассо-
гласование векторов угловой скорости и скорости полета невелико.
Поэтому ДЛЯ описания аэродинамических сил и моментов в таких режимах (в
частности, штопора) в качестве невозмущенных их значений могут быть использо-
ваны данные, получаемые методом установившегося вращения. Наиболее распро-
страненная схема проведения такого эксперимента соответствует случаю, когда век-
тор угловой скорости вращения совпадает с направлением набегающего потока
(wxV=0).
В этом эксперименте, так же как и при проведении статического экспери-
мента, величины углов атаки и скольжения остаются постоянными. Величина без-
256
размерной угловой скорости © является дополнительным парамсфом, о г которого
коэффициенты аэродинамических сил и моментов могут зависеть нелинейным об-
разом.
Для описания возмущенного движения выделяется ряд кинематических па-
раметров, характеризующих спиральность движения, то есть величину рассогласо-
вания векторов со и V, а также несщционарность обтекания. В качестве таких пара-
метров можно принять безразмерные проекции угловой скорости на скоростные
оси координат ®Уа. со7а, а также безразмерные скорости изменения углов атаки и
скольжения d, Р.
Зависимость аэродинамической реакции от величин возмущающих парамет-
ров © у>, й г , d , Р будем считать линейной
m, = miv iif, (а,Р,со}б) + т“ъюVj + m“’* -» т.п i mfp, (10.10)
i = х, у, z, б = (5ft, бэ, 5Н),
где первый член, помеченный индексом “у.вр.”, определяет величину невозмущен-
ных значений аэродинамических коэффициентов, а вращательные т“Уа, т*'4 и
нестационарные производные т“, зависят от режима обтекания, который, в
первую очередь, определяется параметрами а и со.
Основной вклад в величину аэродинамических сил и моментов вносит пер-
вый член в (10.10), обычно получаемый методом установившегося вращения при
выполнении коллинеарности векторов со и V.
В ряде случаев общие нелинейные зависимости удается упростить, в частно-
сти, как показывает опыт, зависимости от угла скольжения р, угловой скорости ш
и отклонений органов управления б представить линейным образом
т1увр - т,(а)^ п^(а)р + т“(а)и + т“'*соХа + An\(a,6), (10.11)
i = х, у, z.
Частная производная момента по проекции скорости вращения относительно
вектора скорости <о может быть связана с частными производными момента по
проекциям угловой скорости на связанные оси координат
m“x\ нр = cosa cosp - m"y sin acosp + m™z sinp, (10.12)
i = х, у, z.
Гибридная форма представления аэродинамических коэффициентов
Для описания аэродинамических характеристик в условиях пространственно-
го движения самолета со значительным вращением используются данные, получае-
мые методом установившегося вращения при R][n = 0 и комплексы нестационарных
и вращательных производных (10.8), получаемых методом вынужденных колебаний.
При этом производные коэффициентов по проекциям угловой скорости на связан-
ные оси координат, получаемые методом вынужденных колебаний, пересчитывают-
ся к производным по проекциям угловой скорости на скоростные оси координат
= miy вр(а,р,и,б) + т“\кшУа + т"\кй\, (10.13)
1 = х> www.vokb-la.spb.ru
257
1Де
Oj. <J, - *°1
ш, в к =ni|’iK smct f rn, - B K cosa =
= in"1 sin a + m“y cosa + mJ’,
2b
m“\ K - - ~ m“z B K cos p - (m'"' B K cosa - m“y B K sin a )smp=
= -^-л cosp - (in'”1 cosa - in“J sin a )sinP+-^-A- m“ cosp.
Гибридная форма (10.13) позволяет наиболее рационально использовать
имеющиеся в распоряжении данные, но обладает определенными недостатками.
При колебаниях без установившегося вращения режим обтекания может отличаться
от режима обтекания при установившемся вращении модели. Немаловажно также,
что данные обычно получаются на различных установках и на различных моделях.
Для получения более адекватной модели аэродинамических коэффициентов с уче-
том нестационарных членов наиболее естественно использовать аэродинахпгческие
данные, получаемые методом установившегося вращения с отклоненной осью вра-
щения (26).
10.5.2 Расчет равновесных режимов
Расчет равновесных режимов штопора может осуществляться как с использо-
ванием достаточно полных динамических уравнений пространственного движения
(см. Приложение 1), так и с помощью приближенных безразмерных уравнений,
учитывающих баланс инерционных и аэродинамических моментов.
Представление аэродинамических сил и моментов на основе данных, полу-
чаемых методом установившегося вращения, позволяет замкнуть задачу и свести ее
к нахождению решений нелинейной системы уравнений.
Приближенные уравнения позволяют эффективно исследовать все возможные
равновесные режимы штопора самолета, дают достаточно точные опенки для ос-
новных кинематических параметров штопора.
При исследовании автономной динамической системы уравнений (первые
восемь из системы полных уравнений пространственного движения самолета) мо-
жет проводиться анализ устойчивости установившихся режимов штопора, и прово-
дится моделирование управляемого возмущенного движения самолета.
В установившемся штопоре со стационарными значениями параметров дол-
жен устанаачиваться баланс аэродинамических сил и силы тяжести, а также баланс
аэродинамических и инерционных моментов. Приведем достаточно простой вывод
приближенных безразмерных уравнений, позволяющих рассчитать основные кине-
матические характеристики штопора самолета (рис. 10.45).
Запишем условия баланса сил
pV2
mg = chS^-, (10.14)
mR^to2 = crS^- ,
где
ch » -cx cosa + cy sin a,
cr = cx sin a + cy cosa ,
258
(1 условия баланса моментов
Pvп , v
"2 m* = " fyXOyWz,
pV2Sf /Г i v
—-—my - (Ix - Iz)to7(ox,
~ m, = (Iy - Ix)cDxmy.
(10.15)
Рис. 10.45 Схема движения самолета в штопоре.
Предположение о малости угла отклонения спиралеобразной траектории от
вертикали, а также выполнение соотношения а и = 90°, у =- (р-гй) позволяют
следующим образом связать проекции угловой скорости на связанные оси ох, ыу,
cjoz, с величиной угловой скорости о
со х — <о cosa cos(P + 6),
a > =-<й sinacos(p + G), (10.16)
to 2 = ш(Р + 0) sina.
Угол наклона траектории нетрудно выразить через отношение радиаль-
ной скорости к полной скорости полета
e = arcsin(-^ (10.17)
Используя второе уравнение в (10.14), получим
G = arcsin
pS£cr
4пш.
(10.18)
Подставляя значения (10.16) в уравнения баланса моментов (10 15), получим
следующие безразмерные уравнения, правые части которых с учетом (10.18) зависят
только ог углов атаки и скольжения, а также безразмерной угловой скорости
www.vokb-la.spb.ru
259
:'Ч QP <U - к ХИ rOJsuia,
pot
8
,Пу ~ psF“ ' ЬХР+0)cosa,
(10.19)
ш7
- — С02(1
pS^bA
lx)(p +0) sin a cos а.
Совместное решение полученных трех нелинейных уравнений при знании за-
висимостей безразмерных аэродинамических коэффициентов от параметров движе-
ния
П1ХЛ,/ = тмд( а, р, ®. 6 я, б э, б „).
получаемых методом установившегося вращения в Т-105 на установке Ш-5, позво-
ляет определить параметры установившеюся штопора.
Проектируя полный аэродинамический момент на вертикаль и радиус кри-
визны траектории, можно получить другую форму записи этих уравнений 120|:
f 0,-Ul-
in. cosot - mv sin а + - m.B = —- ~ос, sin2а,
y ЬЛ 'P m/2
my sm а + m4 cos а = 0, (10.20)
4(Iy-Ix)__
mz +----’ > w sin 2а = 0.
pSf
Приближенные уравнения (10.20) позволяют достаточно точно оценивать
значения равновесных значений параметров движения в штопоре, и при разумных
упрощениях дают возможность нахождения всего множества возможных режимов
штопора.
Угол скольжения в штопоре, как правило, мал, поэтому допустимо линейное
представление аэродинамических моментов крена и рыскания по углу скольжения
шх - т*Ха)р + Дтх(а,о,5х,5н),
ту = т₽(а)р + Дту(а,а,бэ,бн),
что дает возможность исключить 0 из первых двух уравнений в (10.20)
Дш,
- Дш
’ sin а - к2т, —
|т£ cos а + т, —
X 7 (
cos а,
sm а - cos а + mJ sin
(1021)
<Де
Iy-U
kj - —--,--cro sin 2 а.
Уравнение (10.21) совместно с третьим уравнением в системе (10.20) образу-
ют замкнутую систему уравнений второго порядка, которая методом сканирования
и плоскости переменных a, tn позволяет построить линии нулевого уровня этих
уравнений, пересечения которых и даст все множество возможных стационарных
2(>0
решении исследуемых уравнений. Выполнение уравнения (10.21) соонзегствуег вы-
полнению условия баланса моментов по крену и рысканию, а выполнение третыло
уравнения в (10 20) соответствует условию баланса моментов по тангажу.
Количество различных режимов штопора при одних и тех же отклонениях
органов управления можег быть значительным. Выделение же наиболее опасных из
них связано с исследованием их устойчивости и областей притяжения (по полным
динамическим уравнениям).
На рис. 10.46 приведены примеры расчета параметров равновесных режимов
штопора с использованием приближенных момешных уравнений (10.20, 10 21).
Для различных значений отклонений органов управления - стабилизатора, элеро-
нов и руля направления - в плоское in значений угла атаки а и безразмерной угло-
вой скорости и строятся линии, при которых выполнявши баланс моментов по
тангажу (сплошные линии) и по крену и рысканию (штрих-пунктирные линии).
Пересечение этих линий определяет значения параметров в равновесном штопоре.
Верхний пример иллюстрирует влияние отклонения стабилизатора на существова-
ние авторотационных режимов штопора при нейтральном положении элеронов и
руля направления. Нижний пример иллюстрирует влияние уровня аэродинамиче-
ской несимметрии по рысканию на возможность возникновения устойчивых режи-
мов штопора.
Для оценки кинематики движения самолета в штопоре могут быть использо-
ваны следующие приближенные соотношения ятя основных параметров движения
n »SV
»й₽ + -—сг.
2 пт
to ч «со cos a, со у - 'to sin a, со
а>
pSf
4 mo
sin a
pSf
0-7 sina -р - -—— с,
4mw
2 mg
(ChpS'
R pS/
Кшт ~ ,--У
4тсо
www. vokb-la. spb.ru
261
Рис. 10.47 Бифуркационная диаграмма и значения угла атаки в равновесном
штопоре.
Рис. 10.48 Автоколебательные режимы штопора, проекции замкнутых траекторий.
- 10.5.3 Исследование динамических особенностей
Динамические особенности поведения самолета в штопоре очень разнообраз-
ны {33]. Одной из характерных особенностей динамики самолета на больших углах
атаки является множественность режимов движения, соответствующих одним и тем
же отклонениям органов управления. Реализация каждого из этих режимов зависит
от предыстории движения, а именно: начальных значений фазовых координат и
последовательности отклонения органов управления.
Эффективным средством исследования динамики самолета в штопоре явля-
ются качественные методы и бифуркационный анализ 133], [22]. Так. например,
при исследовании равновесных режимов штопора построение бифуркационных
диаграмм в плоскости параметров управления позволяет выделить области, где
штопор может, в принципе, реализоваться. Реализуемость штопора зависит от сте-
пени ею устойчивости, или наоборот, от характера неустойчивости. Например, ес-
262
нуль сложный автоколебательный режим движения с
взгляд изменением амплитуд колебаний.
Переход) лсссы
Рис. 10.49 ,
Возникновение тороидального аттрактора.
ли равновесный режим колебательно неустойчив, могут возникать устойчивые ав-
токолебательные режимы движения и т.д„
На рис. 10.47 приведен пример расчета семейства равновесных значений па-
раметров самолета в штопоре при изменении отклонений органов управления. Би
фуркационная диаграмма в плоскости отклонений элеронов и руля направления
позволяет наглядно увидеть области существования различных режимов штопора -
плоского или крутого. Тип устойчивости режима штопора отмечен различными ли-
ниями (сплошная линия - устойчивые режимы штопора, штриховая линия - апе-
риодически неустойчивые режимы, штрих-пунктирная линия - колебательно-
неустойчивые режимы штопора).
На рис. 10.48 дан пример расчета автоколебательных режимов движения са-
молета в штопоре с помощью метода точечных отображений и непрерывного про-
должения неподвижной точки. Семейство решений приведено в виде двух различ-
ных проекций.
При определенных отклонениях органов управления автоколебательный ре-
жим движения также может потерять устойчивость. И в этом случае может возник-
нерегулярным на первый
Анализ структуры
фазового пространства
уравнений движения
показывает, что такое
поведение связано с
возникновением устой-
чивого интегрального
многообразия фазовых
траекторий в виде дву-
мерного тора. На
рис. 10.49 приведен та-
кой пример. Переход-
ные процессы демонст-
рируют практически не-
регулярный характер
колебаний, в то время,
как фазовые траектории
наматываются на торо-
идальную поверхность,
о чем можно догадаться
при рассмотрении про-
екций фазовой траекто-
рии на плоскости пара-
метров (мх,Р) и (соу,Р). Достоверно этот факт подтверждает использование метода
точечных отображений Пуанкаре (33].
10.5.4 Приложение 1
Для математического моделирования динамики пространственного движения
самолета, рассматриваемого как твердое тело, используется следующая система
дифференциальных уравнений двенадцатого порядка (самолет имеет три угловые и
три поступательные степени свободы), определяющая изменение параметров а, р,
V, ©х, <ву, ©z, и, у, v, хе, yg, 7g , (Н = yg):
www.vokb-la.spb.ru
263
= о, {[ах о у sin р) sm с/ 1 (ау -кэ х sin р) cos aj / cos р,
= а7 cosp -(ах sinp - со v)cosct + (ау sin3 + co x)sina,
dV / х
- V(ax cospcosa - ау cospsin a + az sin pl,
d«z_Jx-Jv p(H)V2SbA кдв (рнр + Рлсв)^дв
dt " j, °x“y+ 2i~ ’ m'~ _j; ’
A p(H)v2s< к,, (p„p - P,„,)z„
at Jy 2Jy y Jy Jy
НЮх Jy-Jz p(H)V2Sf
dt “ Jx “'°' 1 ’ 2JX n’x’
d3
, = tr silly I- to , cosy,
dt > z 1
= tox - tg3(c\ cosy-toz siny), (10.22)
dip I’ / ,
dt =cVs3(o'COSY“°‘sin7)’
dxg
—- ~ Vx cos tp cos 3 - Vv (- sm 3 cos ip cos у + sin у sin ip) +
4- Vz(sin 3 COS V siny - sin ip cos у) =
= V{cosa cos p cos \p cos 3 - sin a cos p(- sin 3 cos ip cosy + sm у sin ip) +
+ sin p(sin 3 cos ip sin у + sin \p cos y)},
dH
-1 = Vx sin 3 + Vv cos 3 cos у - Vz cos 3 sm у =
= V(cos a cos p sin 3 - sm ct cos P cos 3 cos у - sin p cos 3 sm y),
dz
= - Vx cos 3 sm ip + Vy (cos \p sin у + sin 3 sin \p cos y) +
+ Vz(cos \p cosy - sin 8 sin \p siny) -
- V{- cos ct cos p cos 3 sm ip - sm a cos p(cos \p sin у + sin 3 sin ip cosy) +
+ sin p(cos v cos v - sin 3 sm ip sin y)|,
где
_p(H)VS,
2m V c’ c'
а =₽<Н>Х§с
y 2m :
p(H)VS
az = —4---c;
1 2m
sm 3,
g
— cos3 cosy.
g
V cos 9 sm у
Взаимодействие в системе (10.22) с четырьмя уравнениями, определяющими
изменение (Н, v, хЕ, zg), либо полностью отсутствует, либо очень слабое (Н),
вследствие зависимости аэродинамических сил и моментов, а также тяги двигателей
от плотности воздуха р (Н). Если предположить, что величина плотности р при по-
лете изменяется незначительно, то первые восемь уравнений в (10.22) относительно
переменных (V, a, Р, сох, <оу, coz, и, у) можно рассматривав отдельно, и при фикси-
264
рованной конфигурации самолета (постоянных отклонениях органов управлени
они образуют автономную систему уравнений.
dt
где X — (V, а, р, wx, ciy, <пх, и, у) с R8, 6 = (6В, 5Э, Р) t R5 - век юр состояния
вектор управления.
Система (10.22) используется при исследовании пространственного движ<
ния, когда существенно учесть взаимодействие траекторного и относительного дв>
женин. В частности, при выполнении виражей-спиралей и в режимах штопор
Равновесные режимы движения первых восьми уравнений системы (10.22), для кт
торых выполняются условия баланса сил и моментов, соответствуют движению с<
монета по спиральным траекториям, когда устанавливается синхронизация угловог
и поступательного движений при вращении относительно вертикальной оси снир<.
ли. Вертикальность оси спирали, которая совпадает с направлением вектора угле
вой скорости, следует из условия стационарности углов тангажа 8 — 0 и крена у
0, в этом случае у = ю.
www. vogg^. spb.ru
10.6 Экспериментальные методы исследования в ДДТ'
В данном разделе приведены краткие описания аэродинамической трубу
Т-105 ЦАГИ, экспериментального и измерительного оборудования, а также мето-
дики эксперимента исследования аэродинамики и динамики цпопора моделей са-
молетов Приведено также описание экспериментальной установки ОВП-Ю2Б и
методики испытаний моделей самолетов для исследования нестационарных аэро-
динамических характеристик на больших углах атаки.
10.6.1 Экспериментальное оборудование АДТ-105 для
изучения аэродинамики и динамики штопора
Общие сведения
Вертикальная аэродинамическая труба Т-105 ЦАГИ (рис. 10.50, 10.51) замкну-
того типа имеет один обратный канал и открытую рабочую часть круглого сечения.
Диаметр рабочей части - 4,5 м, высота - 7 м. Воздушный поток в рабочей части
трубы направлен снизу вверх Максимальная скорооь потока V=40 м/с, степень
поджатия сопла п = 5.
Воздушный поток создается вентилятором с электроприводом, расположен-
ным в вертикальном обратном канале трубы. Диаметр восьми- лопастного вентиля-
тора - 7,02 м, мощность электромотора постоянного тока 450 кВт, максимальная
частота вращения п = 4,17 1/с (250 об/мин).
Рис. 10.50 Рис. 10.51
Вертикальная аэродинамическая труба Схематическое изображение основных
Т-105 элементов Т-105.
Для определения значений скорости потока в аэродинамической трубе изме-
ряется избыточное давление Pt = Pk - Ра, как разность между статическим давлени-
ем в форкамере и атмосферным. Избыточное давление подается в жидкостный
микроманомегр или напоромер НС-Э1, хде, преобразуясь в электрический сигнал,
266
подается в ЭВМ. Визуальное наблюдение за значением скорости потока произво-
дится по показаниям микроманометра или цифрового вольтметра.
Характеристики потока
Основными характеристиками, определяющими качество потока воздуха в
рабочей части аэродинамической трубы, являются степень неравномерности
поля скоростей, величины углов скоса потока в плоскостях, параллельных коорди-
натным плоскостям XOY и XOZ, и ею начальная турбулентность.
Измерение коэффициентов поля скоростных напоров ц - и поля ско-
1 Чтр
V,
ростей щ = —
*тр
по осям OY и OZ производилось в плоскости, отстоящей от со-
пла аэродинамической трубы на расстоянии L = 2 м. Здесь q, и V, -значения скоро-
стного напора и скорости потока воздуха, измеренные в i - точке поля аэродинами-
ческой трубы, a qrp и V-ip - значения этих величин, определенные но перепаду ста-
тического давления в форкамере и рабочей части аэродинамической трубы. Нерав-
номерность поля скоростных напоров, характеризуемая величинами отклонений
местных значений коэффициента pq от среднего его значения pq внутри контроль-
ного прямоугольника, имеющего размеры 3,1 м х 1,44 м, и определяющего рабочую
зону аэродинамической трубы, не превышает + 1% и щ = 1,015.
Углы скоса потока воздуха Да и Др являются углами между осью рабочей
части аэродинамической трубы и проекциями вектора скорости на плоскости XOY
и XOZ, соответственно. Абсолютные значения углов Да в рабочей зоне не превы-
шают 0,3, а Др достигают значений 0,7 .
Интенсивность турбулентности е продольного компонента скорости мало ме-
няется при изменении скорости потока воздуха от 5 до 35 м/с и координаты X от
0,3 до 2 м. В зоне, ограниченной окружностью радиусом R = 0,8 м с центром, рас-
положенным на оси рабочей части аэродинамической трубы, относительная турбу-
лентность продольной составляющей скорости не превышает 0,5% При увеличении
радиуса этой зоны до ~ 1,5 м величина е возрастает до 1%.
10.6 Л Л Прибор Ш-4
Прибор Ш-4 (рис. 10.52, 10 53) предназначен для измерения статических аэ-
родинамических сил и моментов X, Y, Z, Мх, Му, Mz моделей самолетов в связан-
ной системе координат.
Основные характеристики.
Диапазон изменения углов атаки 0 90°.
Диапазон изменения угла скольжения ± 30°.
Допустимая масса модели 5 кг
На приборе Ш-4 можно измерять аэродинамические силы и моменты при
yuiax а гаки и скольжения 0 - 360°. Увеличение диапазона изменения угла атаки до
360” обеспечивается изменением положения модели относительно тензометрических
весов. Для этою необходимо предусмотреть крепление модели на приборе Ш-4 не
только сверху, как обычно, но и снизу. www.vokb-la.spb.ru
267
Рис 10 52
Прибор Ш-4 (державка сверху)
Расширение диапазона углов
скольжения до + 180' возможно
при использовании специальной
поворотной втулки, вставляемой в
разъем удлинителя прибора Втулка
позволяет изменять установочный
угол модели от 0 до 360 с шагом
40°, от которого производится из-
менение угла скольжения в диапа-
зоне ± 25' с помошью механизма
изменения угла скольжения при
бора
Прибор Ш-4 состоит из
башни 1, кронштейна 2, электро-
двигателя 3, редуктора 5, верти-
кальною вала 6, скобы 7 штанги
8, державки 9, механизмов измене-
ния углов атаки и скольжения 10,
шестикомпонентных тензометриче-
ских весов, расположенных внутри
модели, токосъемника 4 и удлини-
теля 11 Кронштейн 2 может пере-
мешаться по направляющим 12,
что позволяет при испытании ус-
танавливать модель в рабочей час-
ти трубы на необходимой высоте
Башня перемещается по рельсам
рабочего зала аэродинами ческой
трубы
Рис 10 53 Схематическое изображение размещения прибора Ш-4
с хвостовой державкой
268
На приборе Ш-4 можно проводить испытания модели без вращения и с вра
шенисм Однако, в последнее время он, в основном, используется для испытании
модели без вращения Весы размещаются внутри модели таким образом, чтобы их
оси были параллельны осям модели Между весами и механизмами изменения у«
лов атаки и скольжения устанавливается удлинитель 11, предназначенный для
уменьшения затенения модели механизмами изменения аир При испытании мо-
дели без вращения нет необходимости совмещать центр весов с точкой, cooibctcf-
вующии центру масс самолета, так как программа обработки результатов экспери-
мента на ЭВМ предусматривает пересчет характеристик на условия, соответствую
щис любому заданному положению центра масс самолета Измерительным элемен
том прибора являются шестикомпонентные тензометрические весы №698 цилинд-
рической формы, имеющие следующие характеристики
Масса 3,33 кг
Диаметр 0,052 м
Длина 0,1692 м
Пределы измеряемых сил, кге X ~ + 35, Y = + 40, Z = ± 35
Пределы измеряемых моментов, кгем Мх = + 1,0, Му = + 2,0, М7 = 4 4 0
Испытания модели проводятся в два этапа вначале модель испытывается без
воздушного потока, затем по той же программе с воздушным потоком Разность
измеренных величин составляет значение аэродинамических си т и моментов в за-
висимости от углов атаки и скольжения В результате испытании опретеляются за-
висимости коэффициентов сх, cv cz, mx, my, m7 = f(a, P), по которым, в частности,
вычисляются статические производные mx, т^, с^ - f(a) и коэффициент динами-
ческой устойчивости по углу скольжения Ср(а) По результатам испытании мотели
с отклоненными органами управления вычисляются их эффективности
При испытании модели указанным способом на углах атаки a _ 10 - 1е при
Р = 0 возможно влияние удлинителя 11 на обтекание вертикального оперения Для
исключения этого влияния можно использовать хвостовую державке с тен юметри-
ческими весами N 647, имеющими следующие характеристики
Масса
Длина
Диаметр
Пределы измеряемых сил, кге
Пределы измеряемых моментов, кгем
1,092 кг
0,33 м
0,034 м
X = х 40, Y = ± 40, Z = ± 40
Мх = ± 3,0, Mv = т 3 О, М7 = ± 5,0
10.6.1.2 Прибор Ш-5
Прибор Ш-5 также, как и прибор Ш-4, предназначен для исследования аэро-
динамических характеристик моделей с вращением и без вращения По сравнению
с прибором Ш-4 на приборе Ш-5 значительно уменьшено влияние поддерживаю-
щих устройств на аэродинамические характеристики исследуемой модели при вра-
щении
www.vokb-la.spb.ru
269
Рис 10 54 Прибор Ш-5
Основные характеристики
Диапазон изменения угла атаки
Диапазон изменения угла скольжения
Максимальная угловая скорость
Направление вращения
Допустимая масса модели
0 - 90"
±90
12,6 рад/с (120 об/мин)
правое и левое
5 кг
Прибор Ш-5 (рис 10 54) отличается от прибора Ш-4, в основном, механиз-
мом изменения углов атаки и скольжения, выполненным по инои схеме Этот ме-
ханизм состоит из вертикальной державки 1, закрепленной на поперечной штанге
2, узлов изменения углов атаки и скольжения модели 3 и 4, кривошипа с ломаной
осью 5, промежуточного вала 6, державки тензометрических весов 7 На втором
конце поперечной штанги 2 установлен балансировочный противовес 8 Вал кри-
вошипа с помощью червячной пары и редуктора соединен с электродвигателем,
размещенным внутри вертикальной державки Привод промежуточною вала, со
стоящий из электродвигателя, второй червячной пары и редуктора, размещен внут-
270
’ри корпуса кривошипа Относительно оси промежуточно! о вала 6 модель повора-
чивается на приборный угол скольжения 011р, а относительно оси кривошипа 5,
проходящей под углом 45° к вертикали, на приборный угол атаки апр Утлы а1|р и
Рпр не равны истинным утлам а и 0 в связанной системе координат Перссче! за
данных по программе испытаний истинных углов а и 0 на приборные углы произ
водится на ЭВМ
Модель при вращении, также как и без вращения испытывается в два этапа
Сначала испытания модели проводятся в специальном барабане при заданных у г
лах атаки, скольжения и угловых скоростях При этом измеряются инерционные
силы и моменты, действующие на модель
Затем по той же программе моде ib испытывается в потоке аэродинамической
трубы, где измеряются суммарные (аэродинамические и инерционные) силы и мо-
менты Разность значении сил и моментов, полученных в потоке и барабане, дает
значения аэродинамических сил и моментов, действующих на модель
В результате эксперимента получаются зависимости коэффициентов сх, ср с7
щк, ту и т7 == f(a) при различных значениях 0 на, которые являются основными
параметрами, определяющими аэродинамические характеристики при установив
шемся вращении модели
Эксперименты на установках Ш-4 и Ш-5 проводятся с использованием из
мерительной информационном управляющей вычислительном системы (ИИУВС)
10.6.1.3 Измерительно-информационная управляющая
вычислительная система (ИИУВС-105)
Сбор и обработка результатов эксперимента проводимого в Т-105, произво-
дится ИИУВС-105, созданной на базе мини-ЭВМ Эта система осуществляет авто-
матизированный сбор изменения электрических сигналов, вырабатываемых в про-
цессе эксперимента тензометрическими весами, а также их первичную обработку в
темпе проведения эксперимента Результаты измерении хранятся в запоминающем
устройстве - магнитном диске Используя специальные программы можно произ-
водить вторичную обработку этих данных или выводить их на печать в виде таблиц
и графиков
При проведении экспериментальных исследовании, в которых задаваемыми
параметрами являются углы атаки а и скольжения 0, процесс испытаний полно-
стью автоматизирован В этом случае изменение положения испытываемого объек-
та в аэродинамической трубе осуществляется механизмами, управляемыми ЭВМ по
заданной программе
Для ИИУВС-105 имеется библиотека программ, обеспечивающая проведение
различных, наиболее типичных для Т-105, экспериментальных исследовании Рабо-
та этой системы проводится в форме диалога оператор-машина При этом на экран
дисплея выводится информация, позволяющая контролировать хол проведения
эксперимента, а также результаты измерении основных исследуемых величин
www. vokb-la. spb.ru
271
Основные технические данные ИИУВС-105
Число каналов для приема аналоговых сигналов
Диапазон изменения аналоговых сигналов
Число цифровых входов -выходов
Число измерителей частоты
Максимальные значения измеряемой частоты
Число аналого-цифровых преобразователей
Полное время цикла измерения
Разрешающая способность
Потрешность преобразования
Емкость оперативного запоминающего устройства
Емкость внешнего запоминающего устройства
Число измерений ИИУВС в секунду
Алфавитно-цифровое печатающее устройство
Скорость печати
Число символов в строке
Алфавитно-цифровой дисплей
Скорость вывода информации
Число строк
Число символов в строке
Рулонный графопостроитель
Скорость проведения прямой по любой оси координат
128.
от -10 до +10 В,
64/64.
4.
10 кГц.
2.
менее 50 мкс.
12 битов.
0,1%.
64 Кбайта.
1,6 Мбайта.
10000 не более.
1 шт.
245 строк/мин.
132.
2 шт.
10000 симв/с
16.
80.
1 шт.
10 м/с.
10.6.1.4 Оборудование для исследования свободно штопорящих
моделей самолетов
При исследовании характеристик свободно штопорящих моделей самолетов
применяется следующее оборудование: тросовые подвески, автомат отклонення ру-
лей и элеронов, пульт управления автоматом, киноаппарат, осветительная аппара-
гура, маятниковый прибор дчя определения моментов инерции и расшифровочный
прибор.
Тросовые подвески
Тросовые гибкие подвески (верхняя и нижняя) предназначены для подвеши-
вания модели в рабочей части аэродинамической трубы (рис. 10.55) и удержания ее
от резких бросков при выходе из штопора, а также для передачи электрического
тока к автомату отклонения рулей и сигнальным лампочкам. Подвески крепятся к
шарнирам, установленным на модели. Шарниры располагаются таким образом,
чтобы линия, соединяющая их центры, проходила через среднее положение центра
масс модели и составляла с осью ОХ модели угол 55°. При испытании модели на
нормальный и перевернутый штопор на нее устанавливают две пары шарниров.
На верхней подвеске, вблизи модели, располагаются три сигнальные лампоч-
ки: нижняя лампочка загорается в момент, когда вес модели уравновешивается си-
лой сопротивления, средняя и верхняя лампочки загораются при отклонении рулей
на вывод из штопора. Второй конец верхней подвески через вертлюг и блоки опус-
кается вниз и находится в руках экспериментатора. К нижней подвеске прикреплен
груз, который перемещается вдоль трубки, расположенной на оси рабочей части
аэродинамической трубы. Груз предназначен для убирания нижней подвески при
снижении модели. Для моделей массой 1 * 7,5 кг применяются подвески из сталь-
ного троса 0 2,5 мм с массой груза подвески 0,35 кг, для моделей массой менее
272
1 кг - подвески из стального троса 0 1 мм. В последнем случае концы верхней и
нижней подвесок находятся в руках экспериментатора
Рис.10.55
Схема проведения испытаний на свободный што-
пор.
Автомат отклонения органов управления модели
Автомат предназначен для отклонения рулей и элеронов из одного заданного
положения в другое. Отклонение органов управления осуществляется в любой тре-
буемой последовательности с необходимыми интервалами. Это позволяет для каж-
дого конкретного самолета определить методику пилотирования для вывода само-
лета из штопора до летных испытаний. Б настоящее время в Т-105 применяются
три автомата: АС-3, КМ-3, КМ-4.
Основные характеристики автоматов
АС-3 КМ-3 КМ-4
Габариты, мм 161 х 38 х 34 115 х 30 х 28 115 х 30 х 36
Масса, кг 0,202 0,160 0.180
Число каналов 3 3 4
Напряжение эл.тока, В 24 24 24 j
Макси мяльный ход тяги,мм 15(+7,5) 15(±7,5) 15(4 7,5) 1
www.vokb-la.spb.ru
273
Пульт управления
I 1ульт предназначен для управления рулями и элеронами на вывод модели из
штопора в потоке аэродинамической трубы. Интервалы времени между отклоне-
ниями рулей и элеронов задаются на пульте управления. Сигналы с пульта управ-
ления на автома1 посылаются экспериментатором в момент, когда модель досшгаст
установившегося режима штопора.
Киноаппарат
Для киносъемки опыта используется киноаппарат Гранд Витое фирмы
"Дебри", позволяющий производить киносъемку с часто! ой 64 - 240 кадров в се-
кунду. При обычных исследованиях оказывается достаточной частота 65 -=- 80 кад-
ров в секунду. На один кадр с моделью производится киносъемка хронометра, сиг-
нальных лампочек, указывающих моменты отклонения рулей, и планшетки с номе-
ром модели, датой и порядковым номером эксперимента Стрелка хронометра де-
лает один оборот за 0,4 с.
Осветительная аппаратура
Во время экспериментов модель освещается 36 прожекторами мощностью по
5 кВт каждый. Прожекторы расположены на стенках рабочего зала и объединены в
4 группы
Маятниковый прибор для определения моментов инерции динамически подобных мо-
делей
Перед испытаниями модели на штопор определяются ее осевые моменты
инерции 1х, 1у, 17 относительно связанных осей OX, OY, OZ на трехнитном маятни-
ковом приборе методом крутильных колебаний (рис. 10.56). Маятниковый прибор
состоит из верхней и нижней частей подвеса и проволочных нитей Нитью подвеса
служит стальная проволока 0 1,2 мм, длиной 4,13 м. Нижняя часть подвеса выпол-
нена в виде дюралевого кольца 0 0,6 м, к которому подвешивается модель с помо-
щью специальных державок. Моменты инерции модели определяются как разность
между моментами инерции модели с подвесными устройствами и моментами
инерции подвесных устройств. С помощью специального приспособления модель
вместе с подвесными деталями отклоняется от положения равновесия на угол 10 -
12°, отпускается и начинает свободно колебаться. Период колебаний измеряется
хронометром, который включается и выключается автоматически.
Моменты инерции вычисляются по формуле:
где
Т - период колебаний,
m - масса модели с подвесными устройствами или без них,
R - радиус окружности, на которой расположены узлы крепления
нитей,
с- расстояние между центром масс модели и осью прибора,
t - длина нитеи прибора.
Центр масс прибора желательно совмещать с осью маятникового прибора (с = 0).
С целью исключения влияния присоединенных масс воздуха на моменты инер-
ции .модели маятниковый прибор установлен в камере переменной плотное? и вы-
274
сотой 7 м, диаметром 3 м и диаметром входного люка 1 м. Размеры камеры hoibo-
ляюг определять моменты инерции моделей самолетов размахом до 1,5 м или дли-
ной до 1,5 м. Диапазон давлений в камере 40 - ЮООх]О2 Па (30 - 760 мм рт. ст.)
Рис. 10.56 Маятниковый прибор для определения моментов инерции.
Расшифрованный прибор
Прибор (рис. 10.57) предназначен для расшифровки кинолент, на которые
снято движение модели самолета в свободном штопоре в аэродинамической трубе
Т-105. Он состоит из проекционного аппарата, карданного трехстепенного устрой-
ства и экрана со светоотражающим покрытием. Расшифровка производится сле-
дующим способом, одновременно проецируются на экран изображение свободно
штопорящей модели с кинопленки и тень от расшифровочной модели, установлен-
ной в карданном устройстве. Поворотом модели на карданном устрой-
Рис. 10.57 Оборудование для расшифровки параметров движения модели.
www. vokb-la. spb.ru
275
сгве совмещают тень с изображением, тем самым устанавливают расшифровочную
модель в положение, подобное" положению свободно штопорящей модели в потоке
аэродинамической трубы. На лимбах карданного устройства читают значения углов
а, р и ip между осями систем земных и связанных координат. Расшифровывая ки-
нопленку через определенные интервалы времени по контрольному хронометру
снятому также на кинопленку, получаюг характер изменения положения модели в
потоке трубы в пространстве по времени.
Методика эксперимента
Испытания модели на штопор в аэродинамической трубе Т-105 проводятся
после того, как модель пройдет предварительную подготовку, которая заключается
в обмере модели и составлении паспорта, а также в определении массово-
инерционных характеристик модели, т.е. массы, положения центра масс и момен-
тов инерции.
Эксперимент проходит в следующей последовательности' рули на модели
отклоняют по штопору и задают программу отклонения рулей на вывод ее из што-
пора согласно программе испытаний. Для запуска модели в штопор при скорости
воздушного потока, меньшей скорости взвешенного состояния (V = 10: 15 м/с в
зависимости от массы испытываемой модели), экспериментатор вносит модель в
поток и вручную сообщает ей вращательный импульс. Скорость потока увеличива-
ется до величины, при которой вес модели уравновешивается силой ее сопротивле-
ния. Верхняя и нижняя подвески свободно провисают, не ограничивая движение
модели. При этом модель находится в режиме штопора и начинается ее киносъем-
ка. С пульта управления подается сигнал автомату отклонения рулей и элеронов, и
модель выходит из штопора. Киносъемка продолжается до полного выхода или не-
выхода модели из штопора. Обычно испытания проводятся по типовой программе
испытаний, которая включает испытания на нормальный и перевернутый штопор и
испытания с противоштопорными средствами.
10.6.2 Типовая программа испытаний свободно
штопорящих моделей в ДДТ-105
Целью испытаний является всестороннее исследование характеристик штопо-
ра модели самолета. Ниже приводятся характерные пункты типовой программы ис-
пытаний.
10.6.2.1 Нормальный штопор
I. Определить характеристики режимов нормального штопора модели при
различных комбинациях отклонения органов управления (нейтральном положении,
отклонении полностью и на полхода).
II. Вывод модели из устойчивых режимов нормального штопора производить,
применяя следующие методы отклонения органов управления:
1. Отклонение вначале элеронов в нейтральное положение и руля направле-
ния полностью против штопора, затем через 0.5 - 1 виток - руля высоты
полностью вниз (стандартный метод) и до нейтрального положения.
2. Отклонение вначале элеронов в нейтральное положение и руля высоты
полностью вниз, затем через 0,5 - 1 виток - руля направления полностью
против штопора (обратная последовательность отклонения рулей).
3. Одновременное оноюненис элеронов в нейтральное положение, а рулей -
полностью против штопора.
4. Отклонение вначале элеронов полностью и на подхода по штопору
(против штопора) и руля направления полностью против штопора, загс.м
через 0,5 э 1 виток - руля высоты полностью вниз (усиленный метод пи-
лотирования).
5. Отклонение всех органов управления в нейтральное положение одновре-
менно и в правильной последовательности (одновременно руль
направления и элероны, через 0,5-1 виток - руль высоты).
6. Одновременное отклонение элеронов в нейтральное положение и руля на-
правления полностью против штопора (руль высоты остается отклонен-
ным по штопору).
7. Отклонение элеронов в нейтральное положение, через 0,5. 1 виток - руля
высоты полностью вниз (руль направления остается отклоненным по
штопору).
8. Отклонение руля направления полностью против штопора, затем через
0,5-1 виток - руля высоты полностью вниз, элероны остаются отклонен-
ными полностью против штопора (по штопору).
9. Отклонение только элеронов полностью и на подхода по штопору (против
штопора), а также в нейтральное положение.
10. Отклонение рулей на подхода против штопора для пунктов I. 2 и 3.
III. Провести испытания модели на нормальный штопор при изменении цен-
тра масс на -5% Ъа от предельно переднего и на 5% Ьа от предельно заднего поло-
жения (масса и моменты инерции модели соответствуют вариантам предельно пе-
реднего или заднего положений центра масс).
IV. Для одного положения центра масс модели провести испытания на нор-
мальный штопор при изменении поочередно плоскостных моментов инерции Ц и
Iz на ± 15%. Вывод модели из штопора в испытаниях по пунктам III и IV осущест-
влять методами 1,3 и 5, указанными в пункте II данной программы.
10.6.2.2 Перевернутый штопор
V. Определить характеристики режимов перевернутого штопора модели при
различных комбинациях отклонения органов управления. Положение рулей и эле-
ронов в перевернузом штопоре принимается, как в нормальном полете.
VI. Вывод модели из устойчивых режимов перевернутого штопора произво-
дить, применяя следующие методы отклонения органов управления.
1. Отклонение вначале элеронов в нейтральное положение и руля направле-
ния полностью против штопора, затем через 0,5-1 виток - руля высоты
полностью вверх.
2. Отклонение вначале элеронов в нейтральное положение и руля высоты
полностью вверх, затем через 0,5-1 виток - руля направления полностью
проз ИВ штопора. www.vokb-la.spb.ru
277
3. Одновременное огклонение элеронов в нейтральное положение, а рулей
полностью против штопора.
4. Отклонение элеронов и руля направления в нейтральное положение, руля
высоты полностью вверх одновременно и в правильной последовательно
сти.
5. Одновременное огклонение всех органов управления в нейтральное поло- '
жение.
10.6.2.3 Испытания с противоштопорными средствами
VII. Определить параметры противоп!топорных средств (ракеты, парашюта) и
характеристики выхода модели из устойчивых режимов штопора с использованием
этих средств.
Наиболее возможными методами пилотирования могут быть:
1. Действие одних ракет (одного парашюта), рули и элероны остаются в том
же положении, как и в режиме штопора.
2. Действие ракет (парашюта) одновременно с отклонением всех органов
управления в нейтральное положение.
3. Действие ракет (парашюта) одновременно с отклонением элеронов и руля
направления в нейтральное положение, затем через 0,5 - 1 виток - руля
высоты полностью вниз.
4. Действие ракет (парашюта) одновременно с отклонением одного из рулей
против штопора, одновременно с этим элероны отклоняются в нейтраль-
ное положение и по штопору (против штопора).
Примечания.
I. Испытания модели с подвесками, например, топливными баками, прово-
дить по пункту II (пп. 1, 3, 4, 5, 8 и п.1 с отклонением рулей при выводе
на подхода против штопора).
2. Испытания модели с закрылками проводить по пункту II (п.1,3,5).
3. Испытания модели по пунктам I, II (п.1 и 5), V и VI (п.1) данной про-
граммы проводить на правый и левый штопор.
4. Испытания модели по пункту VII данной программы проводить после
опытов по пунктам I-VI.
278
10.6.3 Изготовление моделей самолетов
10.6.3.1 Свободно штопорящие модели
Свободно штопорящая модель должна быть геометрически и динамически
подобна самолету (см. соотв. разд, настоящих РДК). Для осуществления гео.мегри-
ческого подобия выбирается масштаб М из условия, что максимальный линейный
размер модели (размах крыла или длина модели) должен находиться в пределах
j?0 -г 1,2 м. Необходимо моделировать выступающие части (надстройки), располо-
женные на поверхности самолета (антенны, ПВД, обтекатели на крыле, фюзеляже
И т.д.). Особое внимание следует уделить надстройкам на носовой части фюзеляжа.
Моделированию подлежат все надстройки, высота которых на модели более 2 мм, а
гакже более 1 мм, если их площадь превышает 10 мм2.
Динамическое подобие модели осуществляется для определенной высоты по-
лета самолета при соблюдении подобия по числу Фруда.
После определения масштаба модели и высоты динамического подобия по
графикам моментов инерции и положения центра масс от выгорания горючего и
изменения нагрузки самолета выбираются следующие варианты, которые осуществ-
ляются по подобию на модели'
- самолет с максимальной полезной нагрузкой и запасом топлива 85, 50 и
15%,
- самолет с максимальной полезной нагрузкой, запасом топлива 50% и раз-
личными вариантами подвесных грузов,
- самолет с 50 - 70% максимальной полезной нагрузки, запасом топлива 50 -
60% с несимметрично расположенными подвесными грузами,
- самолет с предельно передним, предельно задним и средним эксплуатаци-
онным положением центра масс.
Кроме выше перечисленных, на модели необходимо подготовить следую-
щие методические варианты.
- смещение положения центра масс вперед на 5% Ьа от предельно переднего поло-
жения при той же массе и моментах инерции,
- смещение положения центра масс назад на 5% Ьа от предельно заднего положе-
ния при той же массе и моментах инерции,
- изменение плоскостного момента инерции 1Х на ± 15% для варианта со средним
эксплуатационным положением центра масс (масса. 1у и lz остаются без измене-
ния),
- изменение плоскостного момента инерции Iz на + 15% для варианта со средним
эксплуатационным положением центра масс (масса. 1х и 1у остаются без измене-
ния).
При проектировании и изготовлении модели следует стремиться к макси-
мальному облегчению конструкции крыла и хвостовой части фюзеляжа. Конструк-
ция модели без грузов и автомата отклонения рулей должна быть на 30% легче мо-
дели по подобию для самого легкого варианта загрузки (посадочного). Ниже в таб-
лице приведены массы моделей легких современных самолетов (кг) в зависимости
ог высо1ы динамического подобия.
www.vokb-la.spb.ru
279
Тип Масштаб, м Масса, _ —
самолета Н-1км 2км Зкм 4км 5км 6км
Квант 1:6,25 865 3,900 4,314 4,776 5,301 5,900 6,3 iT"
Ан-14М 1:20 5180 0,713 0,788 0,873 0,969 1,078 1,203
Л-39 1:11 3620 2,998 3,311 3,666 4,069 4,529 5,054"
Ил-103 1:9 1460 2,208 2,438 2,699 2,996 3.334 1>721_
МАИ-890 1:7 350 1,125 1,242 1,375 1,526 1,698 1,895
Гжель 1:12 2680 1,710 1,887 2,090 2,320 ; 2,581 2,881
Як-112 1:9,2 1200 1,698 1,876 2,077 2,305 2,566 2,863
Молния-1 | 1:8 1480 3,186 3,519 3,896 4,325 4,813 1.371
Из таблицы видно, что конструкция свободно штопорящих моделей самоле-
тов малой авиации должна быть очень легкой. Массу модели вычисляют для каж-
дого выбранного варианта загрузки самолета. Затем вычисляют скорость воздуш-
ного потока, при которой модель будет находиться во взвешенном состоянии. По-
лучаемая величина скорости должна находиться в пределах от 10 м/с до 35 м/с.
При эксперименте возможны удары модели о подвеску. В этом случае часто
повреждаются острые кромки крыла и оперения неметаллических моделей. По этой
причине их делают из явочного материала, например, задние кромки из дюралю-
миниевых пластинок толщиной 0,6 мм и шириной 15мм, а передние из бука и. для
более легких моделей, из липы. Задняя кромка крыла выполняется толщиной 0,3
мм.
Внутри модели устанавливаются: автомат для отклонения органов управле-
ния. проводка управления рулями и элеронами, съемные грузы для изменения мас-
сы, моментов инерции и положения центра масс. На фюзеляж модели устанавли-
ваются надстройки и кронштейны, к которым крепятся подвески. Надстройки на
носовой части фюзеляжа должны быть съемные, а в местах установки надстроек
необходимо предусмотреть заглушки.
Крупные подвесные устройства на модели должны быть съемными и подоб-
ными по геометрии и массе. Устанавливается пара шарниров: верхний задний и
нижний передний. Верхний шарнир электрически изолируется от корпуса модели.
Шарниры должны располагаться таким образом, чтобы линия, соединяющая их
центры, проходила через среднее положение центра масс модели под углом 55 к
оси фюзеляжа. При этом верхний шарнир должен быть расположен за центром
масс модели, а нижний - впереди.
На модели, испытываемой и на перевернутый штопор, устанавливаются две
пары шарниров. Масса нижней подвески вместе с грузом составляет 0,35 кг, что
необходимо учесть при определении массы модели.
Проводка управления рулями и элеронами состоит и з жестких тяг или тросов
и различных качалок, установленных на осях, и служит для соединения органов
управления модели с автоматом отклонения рулей. Тяги, присоединяемые к авто-
мату, должны быть расположены, примерно, параллельно оси фюзеляжа. Все шар-
нирные соединения проводки управления должны иметь минимальное зрение, при
этом усилие, приложенное к тяге, для отклонения любого органа управления моде-
ли из одного крайнего положения в другое не должно превышать 0,25 кГс. Сум-
марный люфт проводки управления должен быть таким, чтобы значения угла от-
клонения органа управления отличалось от заданного не больше, чем на 0,25°. Для
уменьшения люфтов и трения обычно применяются малогабаритные шарикопод-
шипники.
На конце тяги, который крепится к автомату отклонения рулей, должна быть
нарезана внутренняя правая резьба М3 х 0,5. На модели должен быть обеспечен
доступ к узлам проводки управления.
280
Максимальные углы отклонения органов управления модели должны быи
на 5° больше соответствующих отклонений на самолете. Автомат на модели, Kai
правило, устанавливается в носовой части фюзеляжа. К нему должен быть обеспе
чен свободный подход в процессе эксплуатации. С этой целью носовая часть фюзе
ляжа делается быт рост,ем ной. Максимальное онслонение органов управленш
должно обеспечиваться ходом тяги автомата 15 мм (±7,5 мм).
Для измерения углов отклонения органов управления необходимо изюговип
шаблоны. В местах установки шаблонов нанести линии перпендикулярно осях
вращения. На этих линиях просверлить по два отверстия под штыри шаблонов
обеспечив их плотную посадку.
Внутри модели размещаются грузы, с помощью которых обеспечивается ди
намическое подобие модели для выбранных вариантов загрузки. Отклонение зна-
чений моментов инерции модели от требуемых по подобию не должно превышай
3%. Для изготовления грузов применяются тяжелые сплавы плотностью (17 ч- 10) >
103 кг/м3. Грузы устанавливаются в центре масс модели, в носовой и хвостовот
частях фюзеляжа и в консолях крыла. К местам ушановки грузов должен быи
обеспечен удобный подход, для чего на модели делаются съемные крышки. Объемь
емкостей (особенно на концах крыла) для размещения грузов должны быть не-
сколько больше самих грузов, что позволит, в случае необходимости, размести!!
дополнительные грузы для подгонки моментов инерции и положения центра масс
Для этих же целей необходимо обеспечить перемещение центрального груза вдош
оси ОХ модели. Устанавливаемые грузы должны быть закреплены.
Для каждого варианта загрузки модели изготавливается комплект грузов
Комплекты грузов окрашиваются в разные цвета. В случае использования какого-п
груза в нескольких вариантах, его окрашивают в цвета, соответствующие этим ва-
риантам. Составляется схема размещения грузов и таблица с указанием варианте*
загрузки, массы и цвета грузов, а также их координат относительно центра май
модели Хт = 25% ЬА.
Положение центра масс модели по оси ОХ проверяется на ножах. Для этогс
на фюзеляже (чаще на высоте строительной горизонтали) в точках, соответствую-
щих положениям центров масс, просверливаются отверстия, и нарезается резьб!
М4. В эти отверстия устанавливаются стержни длиной 25 -=- 50 мм с резьбой нс
длине 5мм. Также на ножах проверяется положение центра масс модели по оси OZ
Дтя этого в носовой и хвостовой частях фюзеляжа в плоскости симметрии модели
устанавливаются стержни того же диаметра.
Экспериментально определяются моменты инерции модели. Выборочная
контрольная проверка величин моментов инерции модели производится методом
крутильных колебаний на трехнитном маятниковом приборе. Для этого на фюзе-
ляж модели.устанавливаются анкерные гайки с резьбой М4, а на крыле распорные
втулки с внутренним диаметром 4 мм.
Предкрылки и закрылки выполняются в виде съемных пластинок с заданным
углом установки, если щель между крылом и закрылком или предкрылком по мо-
дели в среднем не более 2,5 мм. При щели более 2,5 мм закрылки и предкрылки
выполняются профилированными.
Поверхность модели должна быть гладкой (допустимая шероховатость до 15
мкм) и окрашена в черный матовый цвет. На поверхности модели устанавливаются
реперные точки и наносятся белые линии (толщиной 0,25 мм) следов строительной
горизонтали и плоскости симметрии, Ьд, контрольных сечений крыла и оперения,
проекции осей вращения на поверхности органов управления, линии установки
шаблонов и т.д..
www. vokb-la. spb.
281
10.6 3 2 Расшифрованная модель
Для расшифровки киноленты, полученной при съемке испытании свободно
штопорящей модели, из! отапливается геометрически подобная модель в масштабе
I 4,5 по отношению к свободно штопорящей модели Модель окрашивается в чер-
ный цвет 1 ак же, как и на свободно штопорящей модели, на ее поверхность нано-
сятся контрольные линии Рули и лсроны нс моделируются Мелкие надстройки
на модели не воспроизводятся
Для установки модели на расшифровочныи прибор в фюзеляже, вдоль оси
OY в точке, соответствующей среднему положению центра масс, сверлился отвер-
стие диаметром 5,7 мм
10.6.3.3 Модель самолета для испытаний на приборах Ш-4 и Ш-5
Модель должна быть геометрически подобна самолету и выполнена в том же
масштабе Л/, что и свободно штопорящая модель Ее максимальный линейный
размер не должен превышать 1,2 м
Для испытания модели на приборе Ш-4 можно использовать свободно што-
порящую модель, заранее предусмотрев крепление тензометрических весов внутри
модели
Прочность элементов модели определяется из условий, что скорость потока
V = 35 м/с Коэффициент запаса прочности должен быть не менее 4-х Масса мо-
дели не должна превышать 5 кг
Конструкния рулей, элеронов, щитков, предкрылков и закрылков должна
обеспечивать их жесткость и фиксацию в заданных положениях Установка органов
управления на заданные углы производится вручную Для контроля углов установ-
ки необходимо изготовить шаблоны
На поверхности модели (как и на свободно штопорящей модели) необходимо
моделировать все надстройки Они должны быть съемными Все перестановки над-
строек на модели должны осуществляться непосредственно в аэродинамической
трубе без снятия модели с установки Монтаж и демонтаж надстроек должен вы-
полнятся просто и с минимальными затратами времени
Для установки модели на тензометрические весы внутри фюзеляжа преду-
сматривается силовая коробка с размерами длина 175 - 180 мм ширина 60 мм,
высота 54 мм
Дно коробки должно быть установлено относительно связанных осей модели
с допуском + 0,1 Весы крепятся ко дну коробки четырьмя винтами Отверстия под
эти винты выполняются по кондуктору Доступ к винтам обеспечивается с нижней
поверхности фюзеляжа, для чего на ней предусматривается съемная крышка
10.6.3.4 Перечень изделий и технической документации, представляемых
при сдаче модели для испытаний
1 Свободно штопорящая модель
2 Расшифровочная модель
3 Модель для испытаний на аэродинамических весах
4 Полный комплект чертежей
5 Заполненные паспорта моделей
6 Шаблоны контрольных сечении
7 Шаблоны для измерения углов отклонения органов управления.
8 Схема размещения грузов внутри свободно штопорящей модели для всех
выбранных вариантов загрузки
9 Набор грузов по пункту 8
282
10 График И1М1нения массы, моментов инерции и положения ценчра масс
самолета в зависимое!и от вы1 орания топлива
10 6.4 Обработка результатов испытаний моделей самолетов
10.6.4.1 Эксперимент со свободно штопорящими моделями: точность
измерений, сходимость с летными испытаниями
Результаты расшифровки киноленты на расшифровочном приборе изобража-
ются графически На рис 10 58 приведен типовой график На графике показаны
кривые изменения углов а, £, ц/ по времени, положение opianoB управления моде-
ли в режиме штопора и при выходе из него, а также последовательность отклоне-
ния органов управления Эти кривые позволяют оценить основные характеристики
штопора и выхода из него для исследуемого варианта загрузки Непосредственно из
графика определяются характеристики режима штопора средним угол атаки и
время витка tBITT, за которое модель повернулась на ут ол у = 360 Средняя угловая
скорость модели вы'пгсляется по формуле
2л
и - — —
1ВИТ
Скорость снижения V модели в штопоре вычисляется по показанию жидко-
стного микроманометра
Основной характеристикой выхода модели из штопора является запаздывание
- отрезок времени, отсчитываемый с момента отклонения последнего из ручей на
вывод из штопора до полною прекращения вращения, измеряемый в витках пзап и
до перехода модели на докритические углы атаки в секундах tM[I
Переход от характеристик штопора модечи к характеристикам самочета про-
изводится в соответствии с законами динамического подобия Величины угчов
a, fi, ш и запаздывание в витках пмп сохраняют свои значения и для самолета Од-
но времени, следует учесть масштаб по
формуле приведенной в разделе по-
священном вопросам динамического
подобия
Анализ полученных результа-
тов позволяет оценить характери-
стики режима штопора самолета, ха-
рактеристики выхода его из штопора
и влияние наиболее характерных
ошибок в пилотировании на запаз-
дывание выхода Удовлетворитель-
ным, с точки зрения безопасности, в
штопоре считается самолет, который
выходит из установившегося штопо-
ра с запаздыванием не более одного
витка или не более 3 секунд
(АП-23)
Испытания свободно штопорящих моделей не позволяют исследовать про
цесс входа самолета в штопор и его особенности
Точность определения характеристик режима штопора свободно штопорящих
моделей характеризуется следующими среднеквадратичными погрешностями, полу-
ченными в результат 20-ти кратных испытаний
f.vokb-la.
уюл агаки 0,8°,
угол скольжения 0,8°,
угловая скорость 0,3 рад/с,
скорость снижения модели
в пп опоре 0,064 м/с
Гочносгь метода исследования штопора самолетов путем испытании свобод-
но штопорящих моделей определяется, во многом, степенью согласования основ-
ных харакгериыик штопора, полученных при испытаниях в аэродинамической тру-
бе и в полете Сравнения характеристик штопора отечественных самолетов, полу-
ченных в аэродинамической трубе Т-105 и в летном эксперименте, подтверждают
их хорошую сходимость и высокую эффективность результатов модельных исследо-
ваний
10.6.4.2 Испытания на приборах Ш-4, Ш-5: погрешность измерений
Результаты испытании моделей на приборах Ш-4 и Ш-5 обрабатываются в
темпе эксперимента и выдаются в виде графиков коэффициентов аэродинамиче-
ских сил и моментов сх, су, сг, nix, mv, mz = f(a, 0, о , 6Э, 5B, б„)
На основании резутьтатов испытаний модели на приборе Ш-4, в частности,
вычисляются характеристики боковой статической устойчивости тх, т£, с/'. коэф-
фициент динамической устойчивости с±, а также эффективности органов управле-
ния
В результате испытаний моделей на установке Ш-5 при заданных угловых
скоростях вычисляются приращения аэродинамических коэффициентов, обуслов-
ленные вращением, как функции угтов атаки и скольжения, а также безразмерной
угловой скорости о Для получения вращательных производных и коэффициентов
демпфирования существует методика обработки, основанная на разложении функ-
ции на элементарные слагаемые После вторичной обработки в частности могут
быть вычислены с достаточной точностью производные от аэродинамических ха-
рактеристик модели mV, пГ“ т'/’, т“\ , т“¥, с“у, с™г, т“7
На основании многократных испытании модели на приборе Ш-4 были полу-
чены среднеквадратичные погрешности Si для шести компонентов В диапазоне уг-
лов атаки 0-30 при использовании разных тензометрических весов эти погрешно-
сти составляют
весы N 698 - Sc = ±0,0018. Smx = ± 0.0005,
SL = ± 0,006, Sm, = ± 0,0004,
Sti = ± 0,003, Sm =± 0,0045,
весы N 647 - Sc = + 0.002, Sm,= ±0,0016,
=± 0,016, smy=± 0,0008,
S4 = ± 0,002, Smi = ± 0,0045,
В диапазоне углов атаки 25 - 85 при использовании весов N 698 среднеквад-
ратичные погрешности составляют
Sc =г 0,005, Sm> =± 0,0003,
Ss=± 0,007, Smy=± 0,0003,
Sv =± 0.006, Sm =±0,004
284
10.6.5 Исследование физической картины обтекания
в гидродинамической трубе
В случае получения неудовлетворительных характеристик штопора самолета
при йены гании его свободно штопорящей мотели в вертикальном аэродинамиче-
ской грубе Т-105, возникает необходимость выработки рекомендации по улучше-
нию характеристик штопора самолета С этой целью бывает необходимо знание
спектров обтекания на больших углах атаки Для этого, наряду с исследованиями в
аэродинамических грубах, в ЦАГИ используется гидродинамическая труба ГТ-400
Гидродинамическая труба является 'грубой незамкнутого типа, вертикальная,
с закрытой рабочей частью Стенки рабочей части выполнены из прозрачного ма-
териала (рис 10.59)
Основные характеристики гидродинамической трубы
Сечение рабочей части
Высота рабочей части
Максимальная скорость водного потока
Направление потока
Время непрерывной работы при скорости
потока 0,05 м/с
0,5 м/с
Объем верхнего бака
0,4 х 0,4 м
1,2 м
0,5 м/с
сверху вниз
25 мин
2,5 мин
12 куб м
Рис 10 59
Гидродинамическая труба
Рис 10 60
Визуализация вихревой системы модели само-
лета www.vokb-la.spb.ni
285
Дренированная модель (максимальный размер не более 260 мм) устанавлива-
йся в рабочую часть гидротрубы на механизм изменения углов атаки и скольже-
ния, который позволяет изменять угол атаки в диапазоне ± 180’ и угол скольжения
+ 30, при эюм точка, соответствующая среднему положению центра масс, всегда
находится на вертикальной оси трубы.
Окрашенная вода из бачков по трубопроводам, проложенным в державке,
1]одас1ся во внутренние емкости модели и через дренажные отверстия модели выте-
кает в поток 1идро грубы, образуя видимые спектры обтекания, которые фикенру-
кмея (рис 10.60) с помощью фото- или видеоаппара]уры.
10.6.6 Исследование нестационарных аэродинамических характеристик
в широком диапазоне утло? атаки и скольжения
10.6.6.1 Конструкция модернизированной установки ОВП - 102Б
Одной нз основных установок, используемых в ЦАГИ для исследования не-
стационарных аэродинамических характеристик моделей самолетов, является уста-
новка ОВП-Ю2Б. Она предназначена для работы в аэродинамических трубах
Т-102, Т-103 и реализует метод вынужденных гармонических колебаний с малыми
амплитудами. Установка ОВП-102Б постоянно эксплуатируется в течение послед-
них двадцати лет.
Установка выполнена по модульному принципу - из нескольких базовых ме-
ханических узлов можно собрать три разновидности кинематических схем установ-
ки. Каждая схема позволяет реализовать вынужденные гармонические колебания
испытуемой модели самолета относительно одной из трех осей координат, связан-
ных с моделью по тангажу, по крену и по рысканию.
Основными базовыми механическими узлами установки являются
(рис. 10.61):
- привод гармонических колебаний, состоящий из регулируемого электродви-
гателя (1), маховика (2), синусного механизма с редуктором (3) и передаточ-
ного механизма с безлюфтовыми связями (4),
- Подвижная Г-образная рама (5) с хвостовой державкой (6) и стойка (7) с
подшипниковым узлом; державка может быть двух видов: одинарная и виль-
чатая; стоек также имеется две: большая и малая; Г-образная рама в верхней
части снабжена подшипниковым узлом (8) для обеспечения колебательных
движений державки относительно оси ОХ;
- мобильная платформа (9), на которой собираются модули; платформа с ус-
тановкой по рельсовому пути транспортируется из препараторской в рабо-
чую часть аэродинамической трубы, где она выверяется относительно осей
трубы и жестко фиксируется на поворотном круге.
Типовой эксперимент по определению нестационарных аэродинамических
характеристик самолета ранее, как правило, проводился при нулевом угле скольже-
ния. Для создания утла скольжения на модернизированной установке в настоящее
время используется поворот хвостовой державки установки (6) по крену в подшип-
никовом узле (8) Г-образиой рамы (5) (см. рис.10.61). Поскольку для каждого угла
атаки и заданного угла скольжения необходимо выставлять соответствующий угол
поворота державки, был разработай и изготовлен механизм дистанционного пово-
рота державки.
Фотография различных схем установки ОВП-Ю2Б представлена на рис 10.62.
286
0ВП-Ю2Б
крену.
Пятикомпонентные внугпримоделъные тензовесы
Для эффективного исследования нестационарных аэродинамических характе-
ристик модели самолета используются пятикомпоиентные внутримодельные тензо-
весы.
Тензовесы рассчитаны на максимально допустимые нагрузки:
Y = 60 кГ- Z == 15 кГ;
Мх = 1 кГм: Му = 2 кГм; М7 = 5 кГм.
Точность теизовесов характеризуется величиной доверительного интервала
при Р=95% надежности случайных погрешностей, приведенной к диапазону тензо-
весов. _________________________________ _________
Компонент Y Z Мх !mv
Доверит.инт.% 0,05 0,2 0,2 10.03 0,02
Методика проведения эксперимента
На рис.10.63 представлена блок-схема всего экспериментального измеритель-
ного комплекса. Порядок проведения эксперимента по определению нестационар-
ных аэродинамических производных модели самолета может быть показан на при-
мере измерения одной зависимости нестационарных производных от углов атаки
(одной "поляры") при фиксированном угле скольжения:
287
I. Эхсперимсв ильный комплекс развертывается в рабочей части и кабине
аэродинамической <рубы. Монтируются внешние датчики, оборудование
соединяется кабелями.
2. Установка монтируется по схеме, необходимой для колебаний модели во-
круг выбранной оси. В синусном механизме выставляется необходимая
амплитуда колебании модели.
3- Проводится тарировка всех датчиков экспериментальною комплекса: ня-
тикомпонептных тензовесов; датчика угла поворота державки; тензометри-
ческого, индуктивного и синусно-косинусного датчиков опорною сигна-
ла; датчика угла поворота круга; датчика скоростного напора трубы- Тари-
ровка датчиков может проводиться как в составе комплекса, так н отдель-
но. Датчики с известными тарировочными зависимостями можно не тари-
ровать. а лишь провести контрольные загрузки.
4. Модель самолета закрепляется на державке, выставляется относительно
выбранной базы. Устанавливается необходимая конфигурация модели,
проверяется затяжка органов управления и других съемных частей.
5. Оператор заносит в управляющую Программу параметры (температура,
давление, влажность) атмосферы в рабочей части АДТ. Проводится на-
стройка управляющей программы на тип эксперимента, описываются ка-
налы сбора и управления, задается время и частота опроса датчиков, по-
стоянные (угол скольжения, скорость потока, конфигурация модели и т.Д.)
и меняющиеся (в данном случае угол атаки) параметры поляры, начальное
значение, конечное значение и шаг изменения.
6. Все механизмы устанавливаются в начальное положение, и проводится
"взятие нулей”.
7. Снимаются стопора. Оператор включает двигатель привода н, регулируя
его обороты, разгоняет динамическую установку до необходимой рабочей
частоты. Частота колебаний измеряется частотомером и высвечивается на
индикаторе. Поддержание заданной частоты с необходимой точностью
производится оператором.
8. Проводится снятие экспериментальной поляры без запуска потока. При
этом измеряются инерционные и гравитационные силы, действующие на
модель. Эксперимент ведется автоматически под управлением ПЭВМ из-
мерительного комплекса:
-вычисляются значения угла поворота круга и державки, соответст-
вующие заданным начальным углам атаки и скольжения модели;
-при помощи привода круга АДТ и механизма поворота державки по
крену модель поворачивается в нужное пространственное положение.
Сигнал обратной связи поступает в контур управления с датчика пово-
рота державки и датчика поворота круга. При достижений необходимых
углов круг и державка жестко зажимаются пневмотормозами;
-Проводится сбор информации с тензовесов, датчиков опорного сигнала
и датчиков положения державки и круга. Сбор производится на протя-
жении восьми периодов колебаний модели с заданной частотой- Соб-
8
ранная информация запоминается на жестком диске ПЭВМ. Происхо-'
дит переход к следующей точке поляры.
9. Оператор АДТ включает поток в трубе. Проводится снятие эксперимен-
тальной поляры при наличии потока. Все происходит, как в пункте 8, по
дополнительно во время сбора информации опрашивается датчик скоро-
стного напора.
10. После завершения поляры без потока и в потоке, оператор переходит к
следующей экспериментальной поляре в соответствии с рабочей програм-
мок эксперимента.
Отметим, что Проводя испытания "без потока' не всегда обязательно повто-
рять программу испытаний "с потоком". При испытаниях без угла скольжения дос-
таточно провести замеры “без потока" один раз в начальной точке поляры. При ис-
пытаниях с углом скольжения в большинстве случаев достаточно проводить экспе-
римент без потока при фиксированном угле поворота круга, поворачивая только
державку.
10.6.6.2 Система управления установкой и сбора банных в процессе
эксперимента
В процессе проведения нестационарного аэродинамического эксперимента на
установке ОВП - 102Б необходимо управлять ею для установки требуемых шадений
углов атаки и скольжения, а также собирать данные эксперимента. Для этой цели
применяется автономный универсальный инфомационно - вычислительный ком-
плекс (ИВК), который реализован на базе IBM PC/AT И используется при прове-
дении нестационарного аэродинамического эксперимента в различных а.-ролина-
мнческих трубах НАГИ.
В структуру ИВК входят (см. рис. 10.63);
- персональный компьютер IBM PC/AT’,
- универсальный программируемый контроллер LA - 70, включающий 1 е-ти
канальный блок 12 - разрядных АЦП, и 8 каналов цифровых вво-
дов/выводов.
Рис. 10.63 Блок-схема экспериментального комплекса.
Разработанное математическое обеспечение позвол>»ет проводить с использо-
ванием ИРК различные динамические эксперименты. Математическое обеспечение
доработано включением в свой состав блока автоматического управления ведения
динамического эксперимента по заданной программе. Оператор задает необходи-
мую программу эксперимента в виде диапазонов углов атаки и скольжения и тре-
буемых шагов по этим параметрам, после чего передаст управление экспериментом
ЭВМ, которая в каждой точке программы в автоматическом режиме вычисляет
нужные значения угла поворота круга аэродинамической трубы и угла крена моде-
ли и с помощью цифровых каналов управления и соответствующих исполнитель-
ных механизмов устанавливает эти значения с необходимой точностью. Затем бе-
рется отсчет нестационарного аэродинамического эксперимента в виде записи по
времени в течение заданного количества периодов колебаний показаний датчиков
опорного сигнала и всех каналов тензовесов. Эти результаты записываются на маг-
нитный носитель ЭВМ. Затем эта процедура повторяется по заданной оператором
программе.
Собираемая в процессе эксперимента информация системой записывается в
файлы-протоколы. Все данные вписываются в двоичном виде. Файл-протокол для
каждого набора значений углов атаки и скольжения имеет заголовок, который со-
держит:
-время и лагу записи данных эксперимента.
-параметры потока (число Маха,температуру в рабочей части АДТ и скорост-
ной напор),
-параметры атмосферы (давление, температуру, влажность),
-параметры модели (номер, имя, номер конфигурации, характерные линей-
ные размеры),
-параметры АДТ (номер, название, коэффициент поля трубы).
-идентификатор типа проводимого эксперимента (статика или динамика),
-идентификатор установки и ее имя,
-и первая между точками опроса,
-количество записанных каналов, параметров и точек процесса,
-соответствующие показания датчиков поворотного круга аэродинамической
трубы и утла крена модели. ,
Система имеет программу просмотра файл-протокодов. которая позволяет
прочесть заголовок файла и вывести на экран или на графопостроитель временные
зависимости, записанные по каждому каналу.
Система сбора данных имеет математическое обеспечение для проведения та-
рировки имеющихся датчиков, теизовесов, для отсчета нулевых показаний датчи-
ков, а также проверки считывания информации из каналов.
Принятая структура системы позволяет легко вносить в нее дополнительные
разработки, позволяющие обеспечить проведение и обработку данных любого типа
аэродинамического эксперимента.
290
10.6.6.3 Сравнение результатов эксперимента, полученных методами устано-
вившегося вращения и вынужденных колебаний
При испытаниях методом установившегося вращения на установке Ш - 5 по-
лучаются сложные комплексы вращательных производных
т"’* )СТ Вр = cos a sin р - ш’-' sin а cos£ + in*' sin р, (10.23)
my'1 уст Яр = 1I5y' eosa S'" - ni"’ sin о. cos Р + in“' sin р.
При вынужденных колебаниях модели ло крену, рысканию и тангажу на ус-
тановке ОВП - 102Б также получаются комплексы вращательных и нестационар-
ных производных, например, для момента крена
,]1х‘вк - шх‘ + in* sin а-г ш* coscitgp, (10.24)
ш. ы, П ,7 2бд
п,х вк ~ n'x + mx cosa 4- - - sinatg^,
= П1^ + щ“. '
Простые вычисления показывают, что
П1х'ауст»р =mx\x cos a sin р - m“', sin а cos 0 + m“'B к —~ sin р, (10.25)
ту"'у4тор = ту'в к coso sinр - sinetcosp + т“'в к -^-sinp,
т.е. при вычислении вращательных Производных по угловой скорости коллинеар-
ной скорости полета производные с точками сокращаются.
При р=0 эти выражения существенно упрощаются
m в ” >cr 11Р = ni i cos а - т* “в к sin а, (10.26)
П1у'*УстВр = cos гл — к sina.
Рис. 10.64 Сопоставление результатов испытаний
на Ш-5 и ОВП-102Б.
С помощью формул
(10.26) проводилось сравнение
результатов, полученньга на ус-
тановке Ш-5 прн установив-
шемся вращении модели с без-
размерной угловой скоростью
вращения ё = + 0,05, и резуль-
татов, полученных при колеба-
ниях по крену и рысканию на
установке ОВП-Ю2Б- На
рис. 10.64 показаны соответст-
вующие зависимости комплек-
сов (10-26) от угла атаки при
нулевом скольжеиии. При этом
результаты для установки
ОВП-102Б рассчитаны для час-
тот колебаний f=l,0 Гц и
f = 1,5 Гн, что соответствует
безразме рн ы м частотам
io = 0,043 и и = 0,064. Видно,
291
•пи при малых углах агаки результаты, полученные на различных динамических
.установках, совпадают очень хорошо При развитии же отрывного обтекания на-
блюдаются некоторые расхождения, которые, однако, могут быть обусловлены раз-
личной структурой обгекания при установившемся вращении и вынужденных коле-
баниях модели
292
ЛИТЕРАТУРА
к
t
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
главе 2:
Ляпунов С В , Михайлов IO С Расчет трансзвуковою обтекания профиля с
учетом вязкости Труды ЦАГИ, 1984, вып 2254
Ьолсуновскии АЛ, Глушков НН, Щенникова О Л Приближенный метод
расчета максимальной подъемной силы крыловых профилей при малых
скоростях Труды ЦАГИ, 1986, выл 2313
Никифоров В М Разработка численного метода и протраммы расчета
отрывного обтекания крылового профиля с механизацией при малых
скоростях Ученые записки ЦАГИ, 1993, №1
Ковалев BL, Карась О В Расчет трансзвуковою обтекания стрс ювидною
крыла с учетом влияния вязкости Груды ЦА1 И, 1989, вып 2451
Белоцерковским С М Тонкая несущая поверхность в дозвуковом потоке <аза
М “Наука’, 1965
Глушков Н Н , Инешин Ю Н , Свириденко Ю Н Применение метода
симметричных особенностей для расчета обтекания дозвуковых зетлельных
аппаратов Ученые записки ЦАГИ. тХХ, №1
Чичеров НА Применение теории несущей линии для расчета прямых
крыльев с произвольными профилями Ученые записки ЦАГИ, \о2 1989
Чичеров Н А Расчет подъемной силы аэродинамических компоновок в
широком диапазоне углов атаки Сб “Современные проблемы механики
жидкости и газа” изд АН СССР Иркутск, 1990
Wentz W Н Seetharam Н С A Fowler flap system for higl)-penon«ance general
avation airfod SAE Paper 740365, 19?4
Ражин АФ, Руденко СИ Технические условия на проектирование и
изготовление моделей, предназначенных для испытаний в аэродинамических
трубах Т-102 н Т-103 ЦАГИ ЦАГИ, 1978
Abott 1 Н Theory of wing sections McGrow-Hill Book Company INC 1949
Николаева К С , Пьянзин Г И Сборник характеристик крыловых профилен
по испытаниям в скоростной трубе Т-106 ЦАГИ, выпуск XI, 1963
McGhee R , Beasley W Low-speed aerodynamic characteristics of [‘'-persent-thick
airfoil section designeed for general aviation applications NASA TND-7428, 1973
McGhee R , Beasley W Effects of thickness on the aerodynamic charactenstics of
an initial low-speed family of airfoils for general aviation applications NASA TM
X-72843, 1976
Masdem D J A high-lift wmg section light aircraft Canadian Aeronautics and
Space Journal vol 34, No 1, 1988
Красильщиков П П Практическая аэродинамика крыла Труды ЦАГИ, 1973,
вып 1459
Михайлов Ю С Степанов Ю Г Экспериментальные исстедования
выдвижного закрылка на крыловом профиле умеренной толшипы ( с=12%),
Труды ЦАГИ, 1978, вып 1897
293
18 Liundstroin LG 2-D wind-tunnel experiments with dubte and triple slotted flaps
Г-N AU 993, Stockholm 1973
19 ChaiullJ Summary of section data on trailing-edge htgh-hft devices NACA Report
N938, 1949
20 Петров К П Аэродинамика элементов летательных аппаратов М
‘Машиностроение’, 1985
21 Young А О fhe aerodynamic characteristics of flaps ARC NIQ766, 1947
22 Под ред Проф Г А Колесникова Аэродинамика летательных аппаратов М
•‘Машиностроение”, 1993
К главе 3:
1 Бабкин В И , Теперина Л Н Метод расчета аэродинамической интерференции
элементов крыла и двигательной установки со струями Ученые записки
ЦАГИ, tXVII, 1986, №4
2 Александров В Л Воздушные винты М Оборонив, 1951
3 Зототько Е М Приближенный расчет дополнительной подъемной силы при
обдувке крыла струей от винтов Труды ЦАГИ, 1973, вып 1452
4 Аэродинамика летательных аппаратов Под ред Г А Колесникова, М
Машиностроение, 1993
5 Borst Н V Propeller Performance and Design as Influenced bv the Installation SAE
Technical Paper Senes 810602, Business Aircraft Meeting & Exposition, Wichita,
Kansas April 7-10, 1981
6 Ribner H S Formulas for propeller in yaw and charts of the side-force derivative
NACA Rep 819, 1945
К главе 6:
1 Междуведомственная комиссия по нормам летной годности гражданских
самолетов и вертолетов РФ Авиационные правила, часть 23 Нормы летной
годности гражданских легких самолетов Москва, 1992
2 Междуведомственная комиссия по нормам летной годности гражданских
самолетов и верготе-тов СССР Единые нормы летной годности гражданских
транспортных самолетов Москва, 1985
3 Динамика летательных аппаратов в атмосфере Термины, определения и
обозначения ГОСТ 20058-80 Москва, издательство стандартов, 1981
4 Народный комиссариат Авиационной промышленности СССР Руководство
для конструкторов, том I (аэродинамика, гидромеханика, прочность), 1943
5 Александров Г В, Загаинов Г И , Соркин ДА и др Руководство для
конструкторов, том II “Устойчивость, управляемость и динамика самолетов”,
выпуск 5 “Методика расчета характеристик устойчивости, управляемости и
динамики самолета, выпуск ЦАГИ”, 1968
294
6 Заичик Л Е , Лясников В В , Перебатов В С , Родченко В В , Хмелевский ВЛ
Исследования по оптимизации характеристик продольной и поперечной
управляемости самолетов сельскохозяйственной авиации В печати
7 Лясников В В, Перебатов В С, Родченко В В Методика определения
оптимальных характеристик Продольной и поперечной управляемости и
потребных шарнирных моментов органов продольного управления легких
гражданских самолетов В печати
8 Лясников В В , Перебатов В С , Родченко В В , Хмелевский В Л Оптимизация
характеристик управляемости сельскохозяйственных самолетов Доклад на
международной конференции Август 1995, г Жуковский
9 Мелешин Б А, Бегим Л П Определение критериев управляемости
неманевренного самолета по углу ташажа на неподвижном пилотажном
стенде Труды ЦАГИ, 1973
10 Микеладзе ВГ, Титов ВМ Основные геометрические и аэродинамические
характеристики самолетов и ракет Справочник М Машиностроение, 1982
II Наумов С Я Руководство для конструкторов Том II, выпуск I Устойчивость
и управляемость пассажирских и транспортных дозвуковых самотетов
Издание ЦАГИ, 1967
12 Наумов СЯ, Пустовойтов ВП. Руденя ВИ Методика расчета влияния
водушных винтов на аэродинамические характеристики самолета Труды
ЦАГИ, 1971
13 Белоцерковский СМ, Скрипач БК Аэродинамические производные
летатетьного аппарата и крыла при Дозвуковых скоростях Наука, 1975
14 Калинин А И Суммарные и распределенные аэродинамические
характеристики изолированных Поверхностей при малых дозвуковых
скоростях Труды ЦАГИ, 1973
К главе 7:
I Wasmtynski Z On the congruency of the forming according to the minimum
potential energy with that according to the equal strength Bui Acad Polon Sci ,
Ser Set, tech Vol VIII N6, i960
2 Методы проектирования конструкций самолетов М Машиностроение, 1977
232 с
3 Комаров А Н Основы проектирования силовых конструкций Куйбышевское
кн изд , I960, 88 с
4 Комаров В А О рациональном распределении материала в конезрукциях Изд
АН СССР, серия Механика, №5, 1965, с 85-87
5 Limn Е К Evseev D D and others Multidisciplinary Analytical Support of Aircraft
Design ARGON (Report ofTs’AGI), 1992
6 Положение о расчетных и экспериментальных работах по прочности
самолетов М 1983
295
h. главе 9:
1 Амирьянд I А. Буньков ВI Применение метода многочленов к расчету
параметров установившегося маневра упругого самолета Ученые записки
ЦАГИ, тУЦ. 1976
2 Амирьянд 1 А Теоретическое определение влияния упрут ости и
распределения масс конструкции на некоторые аэродинамические
характеристики самолета в квазиустановившемся движении Ученые записки
ЦАГИ тХ, №1, 1979
3 Евсеев ДД Расчет некоторых аэродинамических характеристик упругого
самолет методом коэффициентов влияния Ученые записки ЦАГИ т IX №6
1978
4 Сергеев А А, Токарь ВЛ Методика расчета характеристик статической
азроупругости летательных аппаратов методом коэффициентов влияния с
использованием пространственных схем метода конечных элементов Ученые
записки ЦАГИ, т 22, №3, 1991
5 1 россман ЕН Эффективность элеронов и рулей при больших скоростях
полета Груды ЦА1 И, №573, 1945
6 РДК-ЦАГИ, т111, книга 2, выпуск 10, 1985
К главе 10:
I Исследование штопора самолетов Библиографический список ОНТИ ЦАГИ,
1987
2 Пышнов В С Аэродинамика самолета Вып 4 Оборонгиз, 1938
3 Тетерюков Я И Штопор самолетов Оборон! из, М , 1954
4 Котик М Г Динамика штопора самолета, М , Машиностроение 1976
5 Бюшгенс Г С , Студнев Р В Динамика самолета Пространственное движение,
М , Машиностроение, 1983
6 Бюшгенс ГС, Студнев РВ Аэродинамика самолета, Динамика продольного
и бокового движения. М , Машиностроение, 1979, 349 стр
7 Гуськов Ю П, Загаинов Г И Управление полетом самолетов, М,
Машиностроение, 1980
8 Седов Л И Методы подобия и размерностей в механике, М , Наука, 1967
9 Методы исследований на летающих моделях Под ред Миронова АД М ,
Машиностроение, 1988
Ю Аэродинамика самолетов на больших углах атаки Библиографический
список ОНТИ ЦАГИ, 1990
11 Аэродинамика ракет Подрез М Хемша и Дж Нилсена, М, Мир, 1989
12 Головкин МА, Горбань В П .Симусева ЕВ, Стратонович АН Обтекание
прямого крыла при стационарных и квазистационарных внешних условиях.
Ученые записки НАГИ, 1987, т 18, N 3
296
13
14
15
16
17
IS
19
20
21
22
23
t24
25
26
27
28
Захаров С Б, Зубцов А В Экспериментальные исследования отрывного
обтекания треугольного крыла малого удлинения. Ученые записки ЦАГИ,
1988, т 19, N1
Вождаев ЕС, 1 оловкин М А, Долженко Н Н Отработка аэродинамики
самолета на моделях при больших углах атаки и на режимах штопора в
вертикальной аэродинамической трубе, Груды конференции по безоиасносш
иолета, ЦАГИ, 1993
Вождтев ЕС, Головкин В А, Головкин МА, Довженко НН Методы
управления взаимодействием вихреьых структур с элемешами самолета ца
больших углах атаки, Ученые «аписки ЦАГИ, №1-2, т27, 1996
Курьянов А И, Столяров Г И, Штейнберг Р И О гистерезисе
аэродинамических характеристик, Ученые записки ЦАГИ, т 10, N 3 1979
Неиланд ВЯ, Столяров ГИ, Табачников В Г Влияние относительной
толщины прямоугольного крыла малого удлинения и числа Рейнольдса на
режимы перестройки структуры обтекания, Ученые записки ЦАГИ т 16
N 3, 1985
Головкин МА, Горбань ВП, Ефремов АА, Симусега ЕВ Гистерезисные
явления в положении областей взрыва вихрей при нестационарном движении
треугольного крыла Труды ЦАГИ, 1985, вып 2319
Гоман М Г . Захаров С Б , Храбров А И Аэродинамическим гистерезис при
отрывном обтекании удлиненньк тел ДАН АН СССР, т 282 NI 198э
Долженко НН Об исследовании установившегося штопора с тмс ,e-m -
Груды ЦАГИ. выпуск N 8817, 1968
Гоман МГ, Суханов ВЛ Расчет взаимодействия продольного п бокового
движений самолета при маневрах по крену Руководство ддя конструкторов по
проектированию самолетов Т 1, книга 6 вып 4 ЦАГИ, l^?^
Гоман МГ, Милаш ЕВ, Храмцовскии АВ Диалоювая система гдигр^мм
для исследования нелинейной динамики самолета КРИГ Информации1.)? ыи
сборник пакетов прикладных программ по аэромеханике самоло i вып 4
ЦАГИ, 1986
Гоман М 1 . Храмцовскии А В Бифуркации установившихся режи пор
штопора самолета В кн Исследования по динамике полета тетателыч
аппаратов М . изд МФТИ, 1986, с 17-25
Ахромеев В И , Гоман М Г и Др Автоматизация вывода самолета из режимов
штопора Техника Воздушного Флота, N3, 1991
Manoeuvre Limitations of Combat Aircraft, AGARD Advisory Report
No AGARD-AR-155A
Rotary-Balance Testing for Aircraft Dynamics, AGARD Advisory Report No 265,
1990
Code of federal regulations Aeronautics and Space, 14, pp 1-59 U S Goverment
Printing Office, Washington, 1988
Ericsson L E Redmg J P Unsteady Airfoil Stall, Review and Extension, J Aircraft,
vol 8, No 8, 1971
297
29 Goman M , Khrabrov A State- Space Representation of Aerodynamic
Characteristics of au Aircraft at High Angles of Attack Journal of Aircraft vol
31,No 5, Sept-Oct 1994, pp 1109-1115
30 Колинько К , Храбров А Использование метода нелинейной иссушен нити
для расчета отрывного обтекания крыла большого удлинения включая
i истерс шеные эффекты, Труды конференции Фундаментальные
исследования в аэрокосмической науке , ЦАГИ, сентябрь 1994
31 Mehra R К., Kessel WC, Canol JV Global Stability and Control Analysis of
Aiicraft at High Angles-of-Attack, ONR CR 215-248-(l)(2)(3),l978-1980
32 Guichetcau P Bifurcation theory appLed to the study of control losses on combat
aircraft La Recherche Aerospatiale, Annee 1982, N2 pp 61-73
33 Zagaynov G 1 Goman M G Bifurcation analysis of critical aircraft flight regimes
1CAS Proceedings vol 1, 1984, pp 217 221
34 Межгосударственный авиационный комитет Авиационные правила, чзсть 23
Нормы lemon ЮДН0С1И граждански» югких самолетов Издание ЛИИ
им М М Громовт, (991
Зэ Vozl dajes LS, Golovkin VA Go (o'-km MA Dolzhcnko N M Mviods ot
Jnfluencing the vortea structure of an hing angles of attack Book Abstracts of
international Conference ‘Fundamental Research in Aerospace Science Zhukovsky,
Russia, 22-24 September, 1994 (Section 2 p 22)
36 Вождаев EC Головкин BA, Головкин MA Об особенное^ * вихревой
структуры крыла в режиме установившегося штопора и ее влиянии на
характер-1 тяки штопера самолета Техника воздушного флога. М^-6 1QQ5
З7 Покровскпи Ед, Тетерюков Я fl Калачев ГС, Михайлов М М.
Рубцова \ И Никитюк А И , Вооони»-ев ВД Руководство для хон^тр-.х^орсв
Том I Аэродинамика самолет Выпуск XI Штопор самолет Издание
ЦАГИ, 19^5
38 Безменова Т Н . Головкин М А Горбань В П Дмитриева В Б Симуссва
FB, Стратонович АН, Яковлев В А Визуализация неустойчивых структур
обтекания прямоугольных крыльев при малых скоростях потока Труды
ЦАГИ М 198’’, вып 2339
39 Головкин М А Горбань В П , Ефремов А А Симусева Е В Не» таииочарные
явления в положении областей ‘взрыва” вихрен, образующихся в окрестности
передних кромок треугольного кры (а Ученые записки ЦАГИ, том Х\Н, N 5
1986
40 Головкин ВА. Головкин МА Численное решение задачи о нестационарном
и отрывном обтекании тел произвольной формы идеальной несжимаемой
жидкостью Труды VI Международной конференции по численным методам в
гидродинамике Тбилиси 20-25 июня 1978г Сбдокл, т 2, М Ротапринт
ИПМат АН СССР, 1978
298
Ваши замечания и предложения по содержания РДК
просим направлять по адресу 140160, Россия Московская
обч г Жуковский, ЦАГИ, НИО-2, ил (095) 556-40 04,
факс (095) 556-43-37
По вопросам приобретения насюяшею издания просим
обращаться по адресу 140160 Россия, Московская обт ,
г Жуковский, ул Жуковского д 1. АО ‘АЭРОКОН”
тел (095) 556-43 77, факс (095) 556-44-81
АВИАЦИЯ ОБЩЕГО НАЗНАЧЕНИЯ
рекомендации для конструкторов
Главный редактор - доктор технических наук, профессор В Г Микетадзе
Редакторы - А И Дунаевский, М Н Чеканова
Производственное издание